cs 4630: intelligent robotics and perception case study: motor schema-based design chapter 5 tucker...
TRANSCRIPT
CS 4630: Intelligent Robotics and Perception
Case Study: Motor Schema-based DesignChapter 5
Tucker Balch

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
What We’ve Covered
• History of Intelligent Robotics (Chapter 1)
• Hierarchical paradigm (Chapter 2)• Biological basis for behavior-based
control (Chapter 3)• Overview of behavior based control
(Chapter 4)• Subsumption architecture (Chapter 4)• Motor schema-based control (Chapter
4)
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Upcoming
• Today: case study of behavior-based control for multirobot team.
• Friday: TeamBots tutorial, new project assignment
• Monday: Midterm Exam• Weds: Begin Chapter 5 (Sensing)• Friday: Guest Lecture (Koenig)

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Social Potentials
Balch & Arkin, IEEE Transactions on Robotics and Automation, 2000

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
The Multi-Foraging Task

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
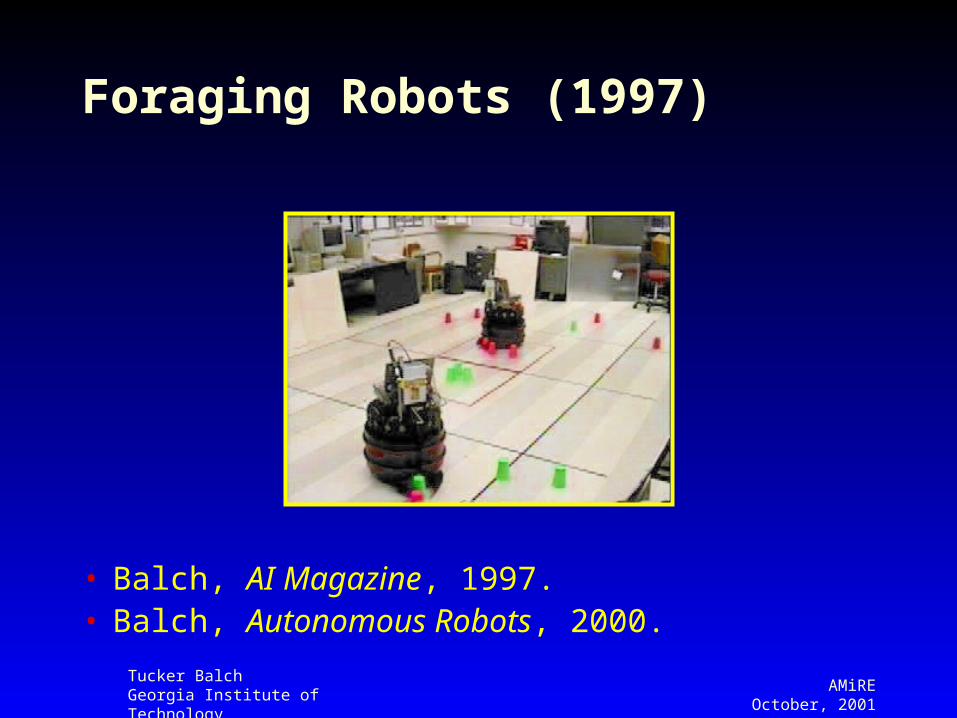
Foraging Robots (1997)
• Balch, AI Magazine, 1997.• Balch, Autonomous Robots, 2000.
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
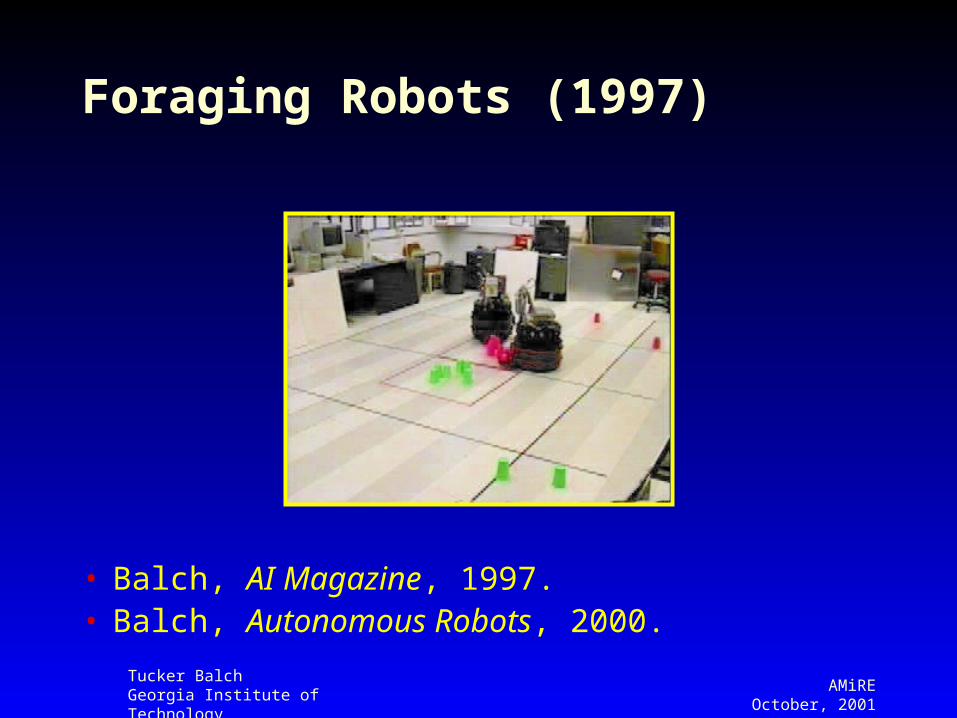
Foraging Robots (1997)
• Balch, AI Magazine, 1997.• Balch, Autonomous Robots, 2000.
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Foraging Robots (1997)
• Balch, AI Magazine, 1997.• Balch, Autonomous Robots, 2000.

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Foraging Robots (1997)
• Balch, AI Magazine, 1997.• Balch, Autonomous Robots, 2000.

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Behavioral Sequencing
Search
Deliver Redhave red
Aquire Red
see red
~see red~have red
at red bin
Acquire Blue Deliver Bluehave bluesee blue
at blue bin
~see blue
~have blue

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Performance as Team Size Increases

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Problem: Inter-Robot Interference

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Heterogeneous Strategy 1: Specialization

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Heterogeneous Strategy 2: Territorial

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Performance Comparison

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
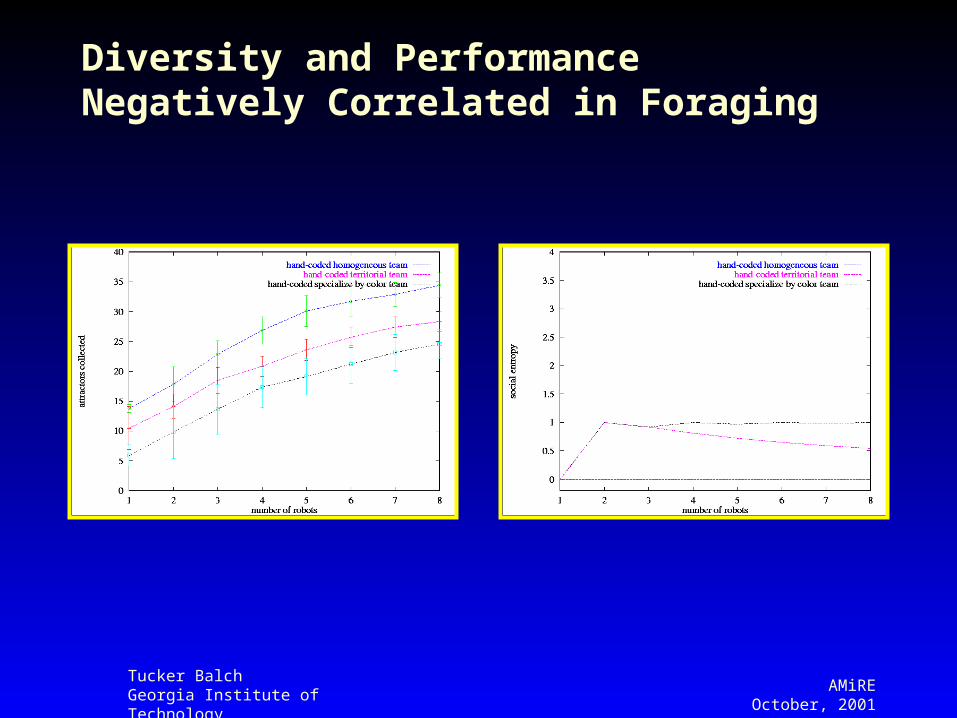
Are Diversity and Performance Correlated?
• Need a measure of robot team diversity
• Approach: information theory
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Diversity and Performance Negatively Correlated in Foraging

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Diversity and Performance Positively Correlated in Soccer
Homogeneous Team Heterogeneous Team
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Where We are
Real-time Video Processing
Behavioral Sequence Representation
Learning Algorithms
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
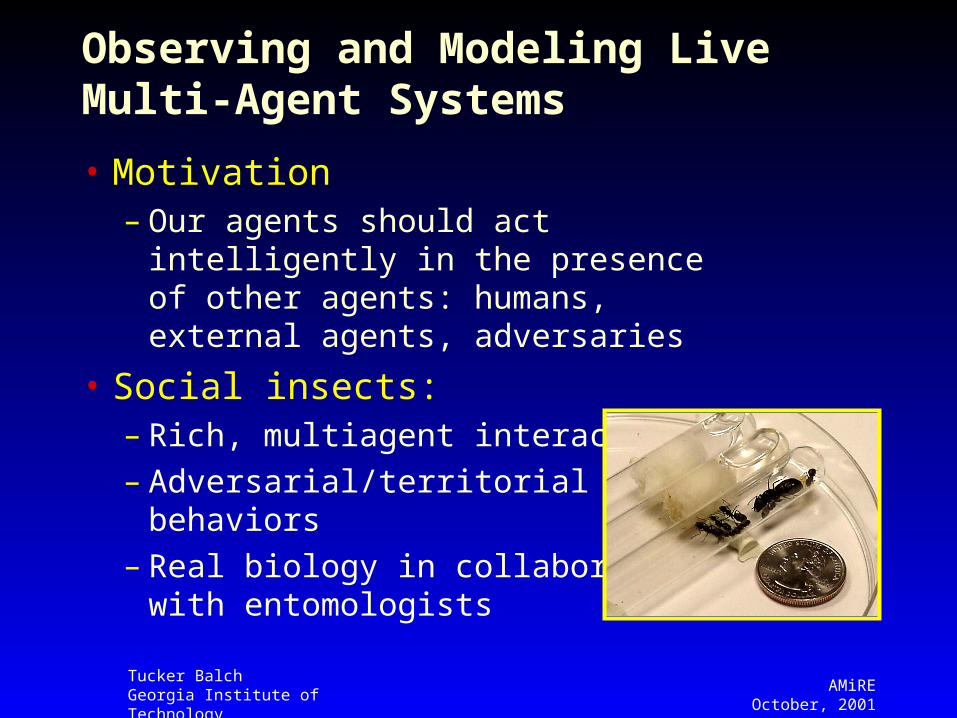
Observing and Modeling Live Multi-Agent Systems
• Motivation– Our agents should act
intelligently in the presence of other agents: humans, external agents, adversaries
• Social insects: – Rich, multiagent interactions– Adversarial/territorial behaviors– Real biology in collaboration
with entomologists
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
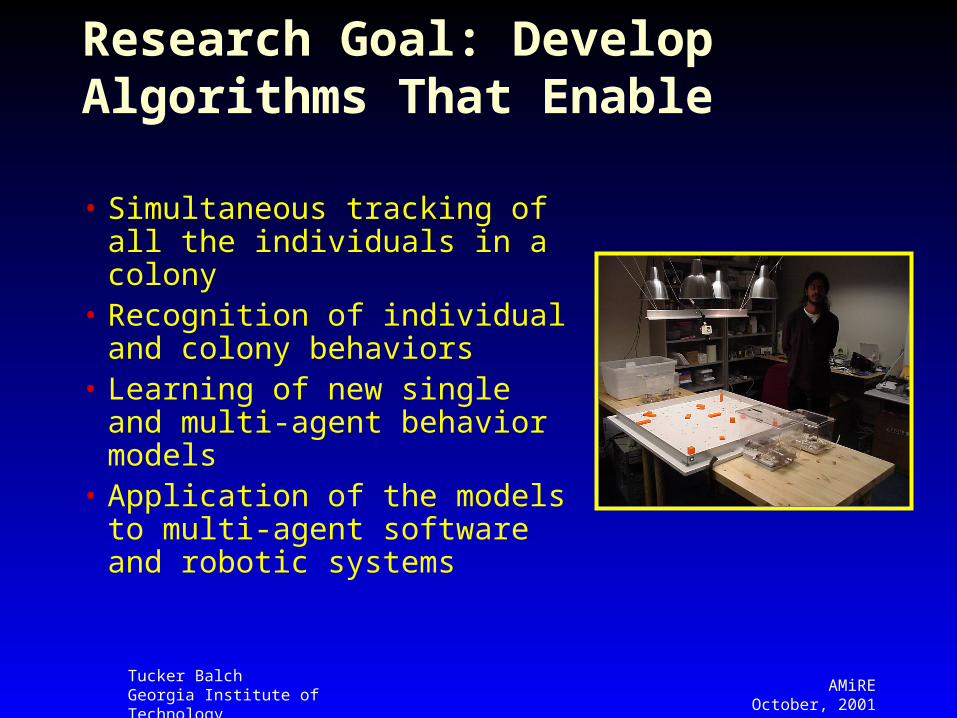
Research Goal: Develop Algorithms That Enable
• Simultaneous tracking of all the individuals in a colony
• Recognition of individual and colony behaviors
• Learning of new single and multi-agent behavior models
• Application of the models to multi-agent software and robotic systems

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
The complexity of ant society
Holldobler & Wilson, 1990Gordon, 1999

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Video of ant behaviors
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
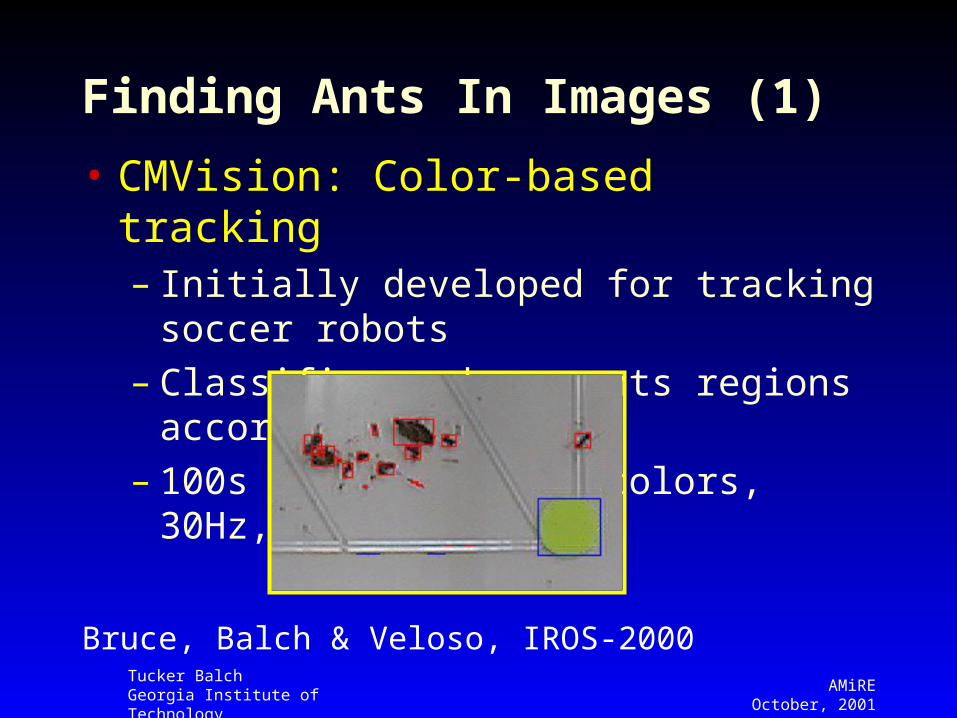
Finding Ants In Images (1)
• CMVision: Color-based tracking– Initially developed for tracking soccer
robots– Classifies and segments regions
according to color– 100s of regions, 32 colors, 30Hz, low
cost
Bruce, Balch & Veloso, IROS-2000
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
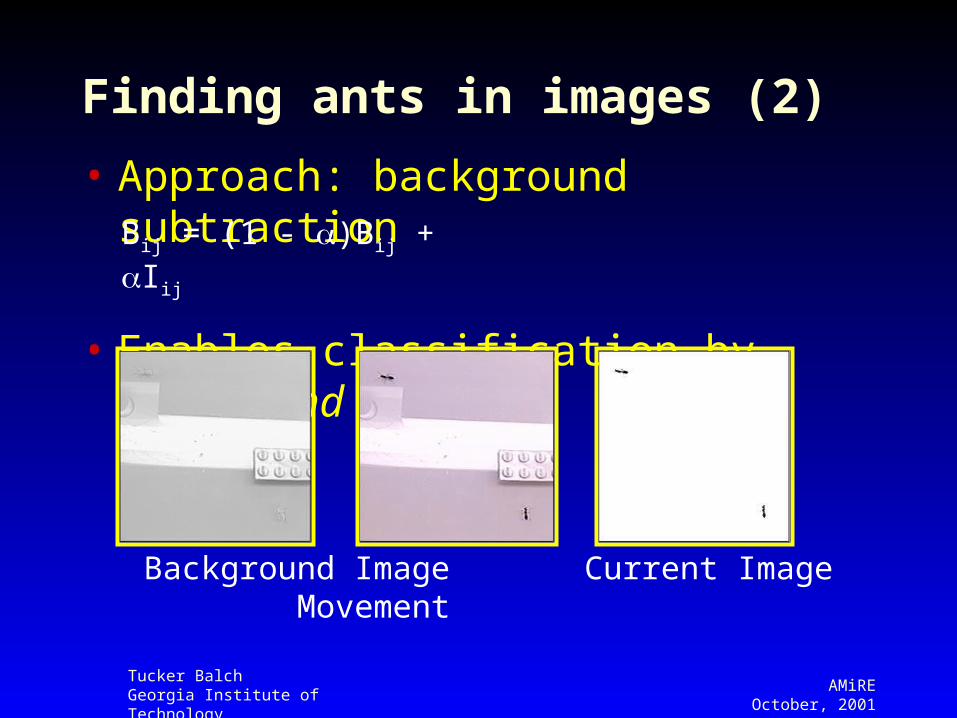
Finding ants in images (2)
• Approach: background subtraction
• Enables classification by color
and motion
Bij = (1 - )Bij + Iij
Background Image Current Image Movement

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
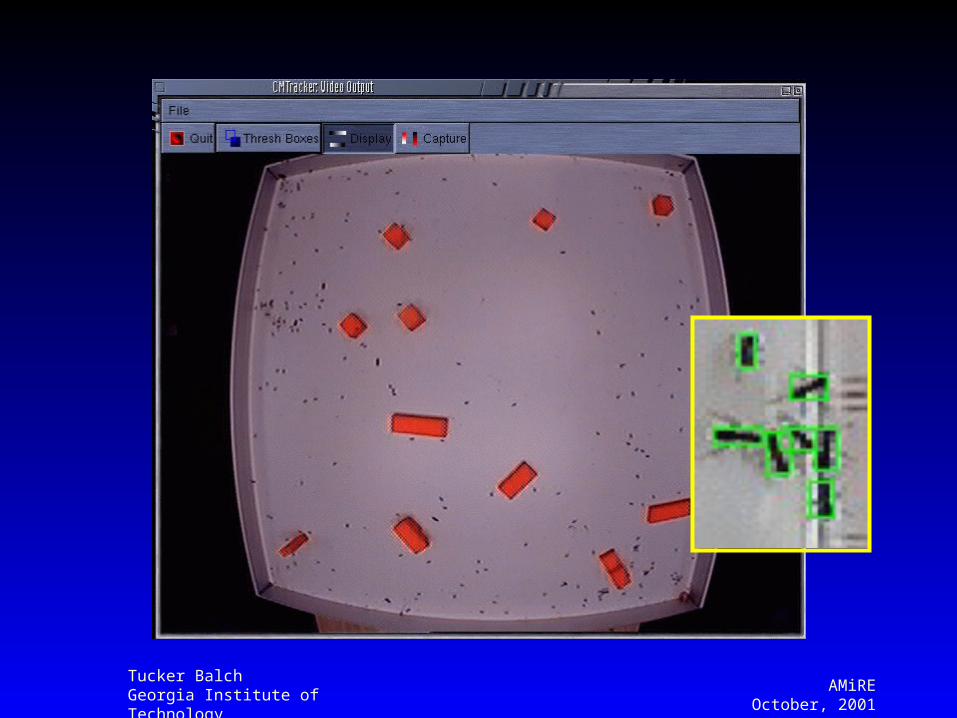
Associating observations with individuals• The association problem
– Best optimal algorithm O(n3)– Greedy approach O(n2)
• Noisy data presents additional challenges– Splitting, merging, drop-outs, pop-ups
• Current approach– “Greedy agents” leverage domain knowledge
• Future– Parallel implementations, Bayesian techniques
(e.g. Xiang & Lesser), radar tracking techniques
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
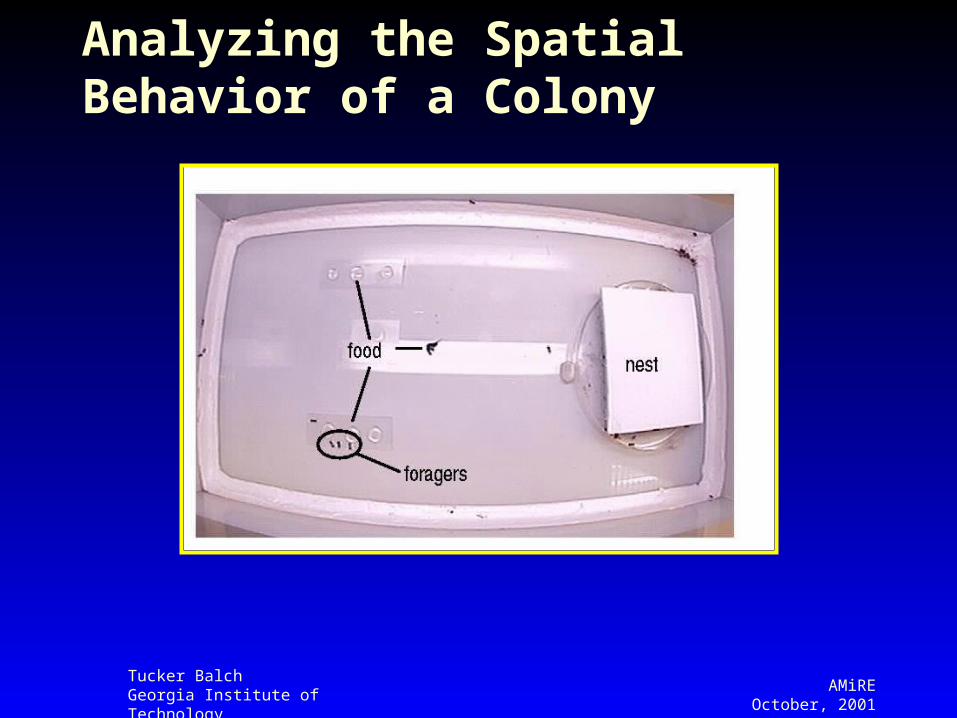
Analyzing the Spatial Behavior of a Colony

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
No Food Available

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Food Available
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
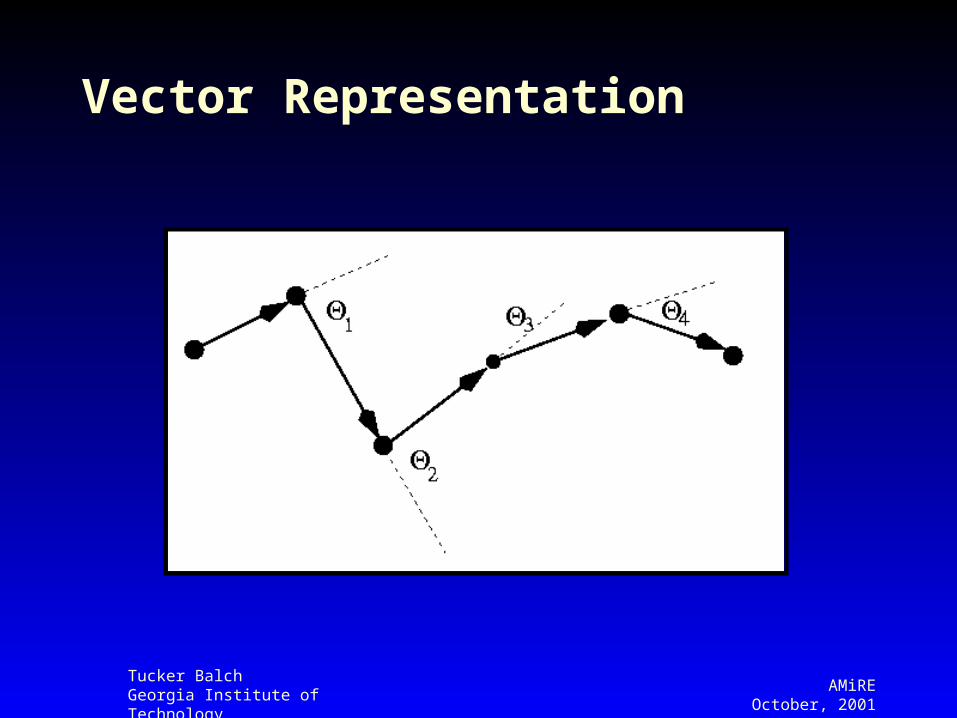
Vector Representation
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
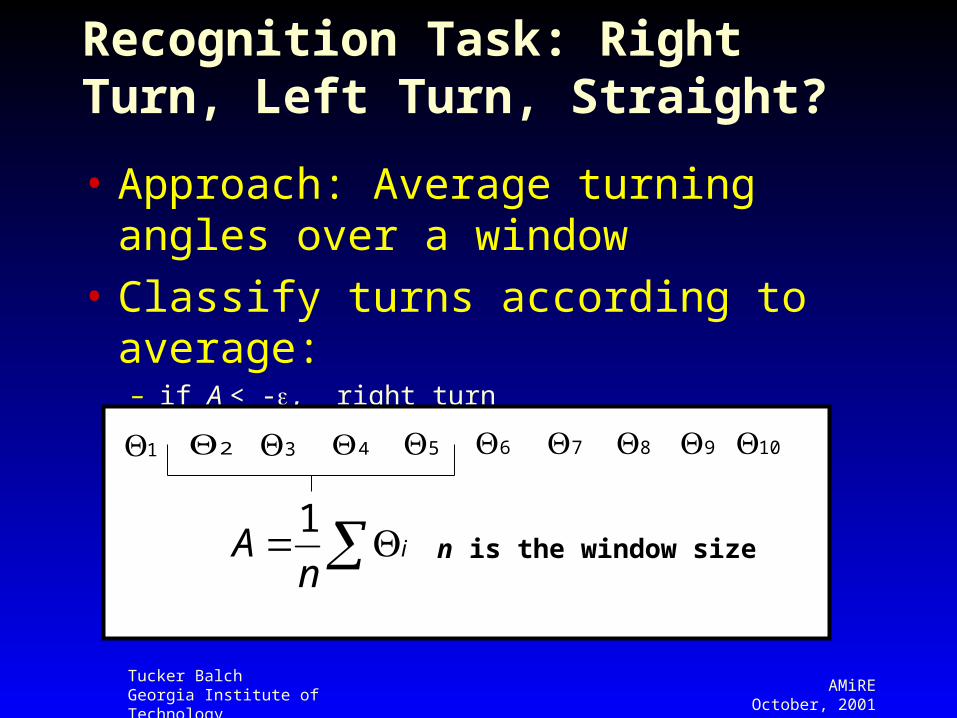
Recognition Task: Right Turn, Left Turn, Straight?
• Approach: Average turning angles over a window
• Classify turns according to average:– if A < -, right turn– if A > , left turn– otherwise, straight
1 2 3 4 5 6 7 8 9 10
in
A1
n is the window size

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Example

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Recognizing Behavior from Movement Traces• Hypothesis:
– Observed movement features considered over time can be used to classify the behavior of a physical agent
• Previous success in observation of soccer agents– Hidden Markov Models (Han & Veloso, 1999)
• Example features– binary: towards-food, at-food, towards-home, at-
home– continuous: velocity, turn-rate, path randomness
• Example behaviors– foraging, patrolling, carrying, recruiting

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Hidden Markov Model Representation
S1 S3S20.9 0.1
0.90.1 0.1
0.9
A B C
AAABBBBBBBBBBBBCCABBBBBBBBBCCA

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Hidden Markov Model Representation
S1 S3S20.9 0.1
0.90.1 0.1
0.9
A 0.8B 0.1C 0.1
A 0.1B 0.8C 0.1
A 0.1B 0.1C 0.8
ACABBBABBBCBBBBCAABBBBABBBBCCA

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Using HMMs for Recognition With the Viterbi Algorithm
AAABBBBBBBBBBBBCCABBBBBBBBBCCA

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
inspired by Han & Veloso, 1999

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Real-time Video Processing
Behavioral Sequence Representation
Recognition AlgorithmsLearning Algorithms
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
Thanks to• Zia Khan• Manuela Veloso• James Bruce• Gak Kaminka• Pat Riley• Rande Shern• Ashley Stroupe
• DARPA Control of Agent Based Systems (CoABS)

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
http://www.cc.gatech.edu/~tucker
AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology
• www.cc.gatech.edu/~tucker• www.cc.gatech.edu/~cprl

Observing Ants: Tracking and Analyzing the Behavior of Live Insects
Tucker BalchCollaborative Perception and Robotics Lab

AMiREOctober, 2001
Tucker BalchGeorgia Institute of Technology