control analógico de inversores de potencia: error nulo en ... · 2 tercer seminario anual cei...
TRANSCRIPT

ce
i@u
pm
.es
Universidad Politécnica de Madrid
Control analógico de inversores de potencia: error nulo en régimen permanente.
David Meneses Herrera

2
Tercer Seminario Anual CEI
Mayo 2010
Introducción▪ Sistema
Fuente auxiliarProtecciones
FPGA + DACControl 1ª y 2ª etapa
1ª etapa potencia (DC/DC)
2ª etapa potencia (DC/AC)

3
Tercer Seminario Anual CEI
Mayo 2010
Estrategia de Control▪ Necesidad de puesta en paralelo
▪ Control corriente promediada en la bobina del filtro de salida, en cada convertidor
+-
+-
+-
+-
Vbus
Vbus
Maestro
Esclavo
Vref_int
Vref_int
Vref_ext
Vo
▪ Estrategia Maestro-Esclavo en la puesta en paralelo Lazo interno de corriente en cada convertidor Un lazo de tensión (maestro) que genera referencia decorriente para el resto (esclavos)

4
Tercer Seminario Anual CEI
Mayo 2010
112
113
114
115
116
117
118
119
120
121
122
123
0 0.2 0.4 0.6 0.8 1 1.2
Vo
(VRM
S)
Po (pu); Po_nom=350W
Límites ±2%
Variación Vo con carga 115±2%_min 115±2%_max
Control PID▪ Circuito equivalente
+
Load
…
…
ZL1
ZL2
ZL3
ZLN
Vo1
io2
io3
ioN
Maestro
Esclavos
ΔV=7,5%
▪ Control con PID Error en régimen permanente
Regulador de corriente
Generador PWM u
- +
irefRegulador de
tensión
-+
5
Tercer Seminario Anual CEI
Mayo 2010
Regulador de corriente
Generador PWM
u- +
iref
++Vreg_i
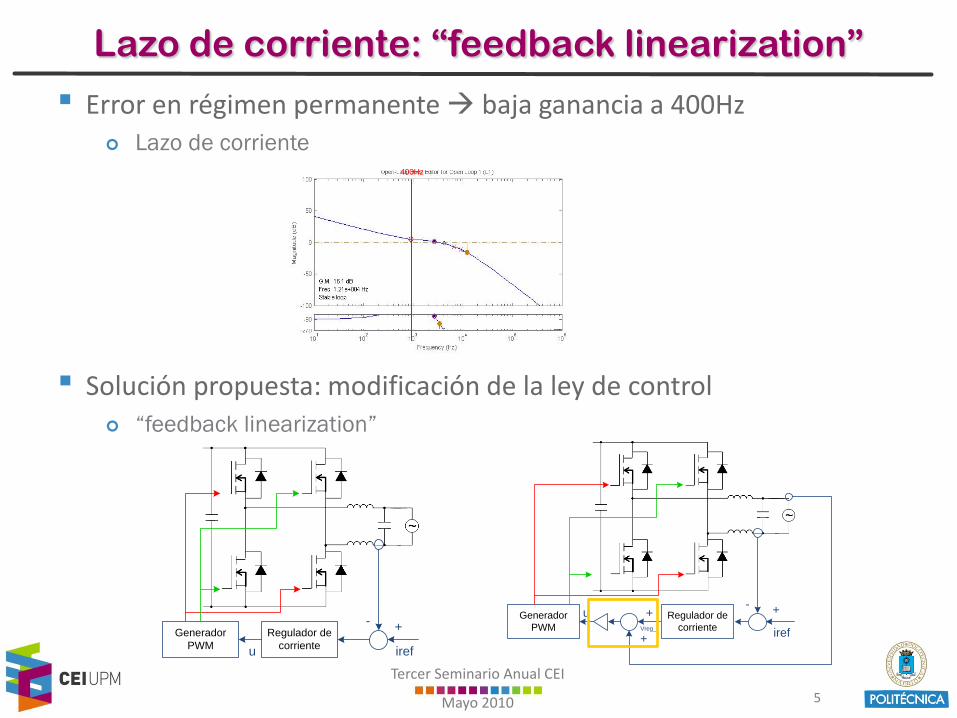
Lazo de corriente: “feedback linearization”
▪ Error en régimen permanente baja ganancia a 400Hz Lazo de corriente
400Hz
▪ Solución propuesta: modificación de la ley de control “feedback linearization”
Regulador de corriente
Generador PWM u
- +
iref

6
Tercer Seminario Anual CEI
Mayo 2010
Lazo de corriente: “feedback linearization”
▪ Modificación ley de control: eliminar efecto de la tensión de salida en la corriente por la bobina
[ ])(1Lrefi iiRVo
Vgu −⋅+⋅=
oL vuVg
dtdiL −⋅=⋅
iregLrefiL ViiR
dtdiL _)( =−⋅=⋅
sLvisG
ireg
LiL ⋅
==1
~~
)(_
-
+u
Vo_feedback
Iref
Rb
Ra
Vreg_i
7
Tercer Seminario Anual CEI
Mayo 2010
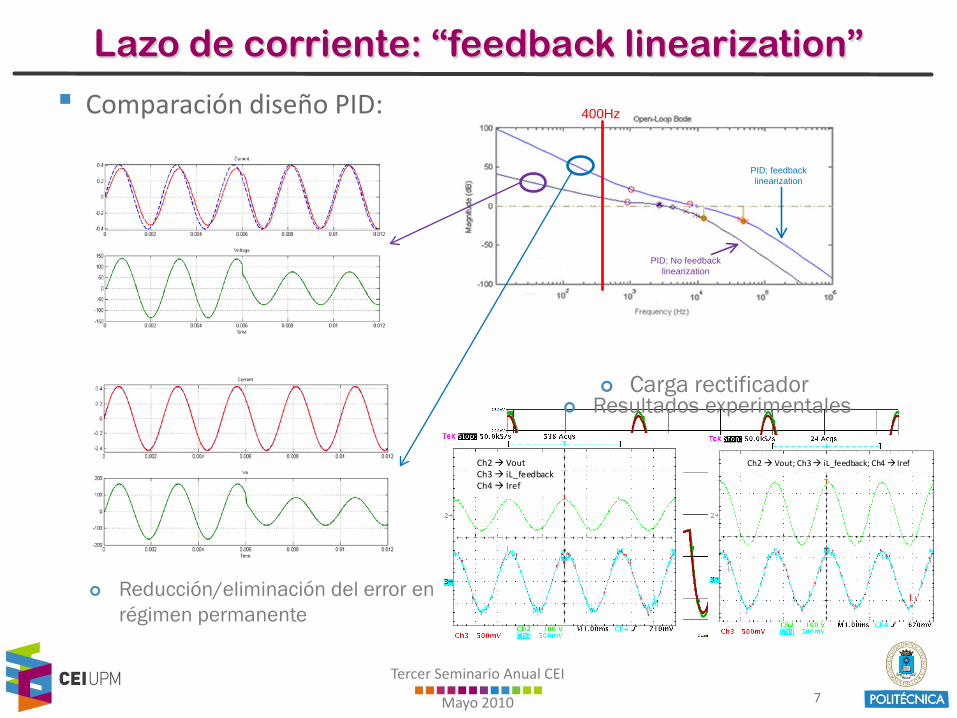
Lazo de corriente: “feedback linearization”
▪ Comparación diseño PID: 400Hz
PID; feedback linearization
PID; No feedback linearization
Carga rectificador
Reducción/eliminación del error en régimen permanente
Ch2 VoutCh3 iL_feedbackCh4 Iref
Ch2 Vout; Ch3 iL_feedback; Ch4 Iref
Resultados experimentales
8
Tercer Seminario Anual CEI
Mayo 2010
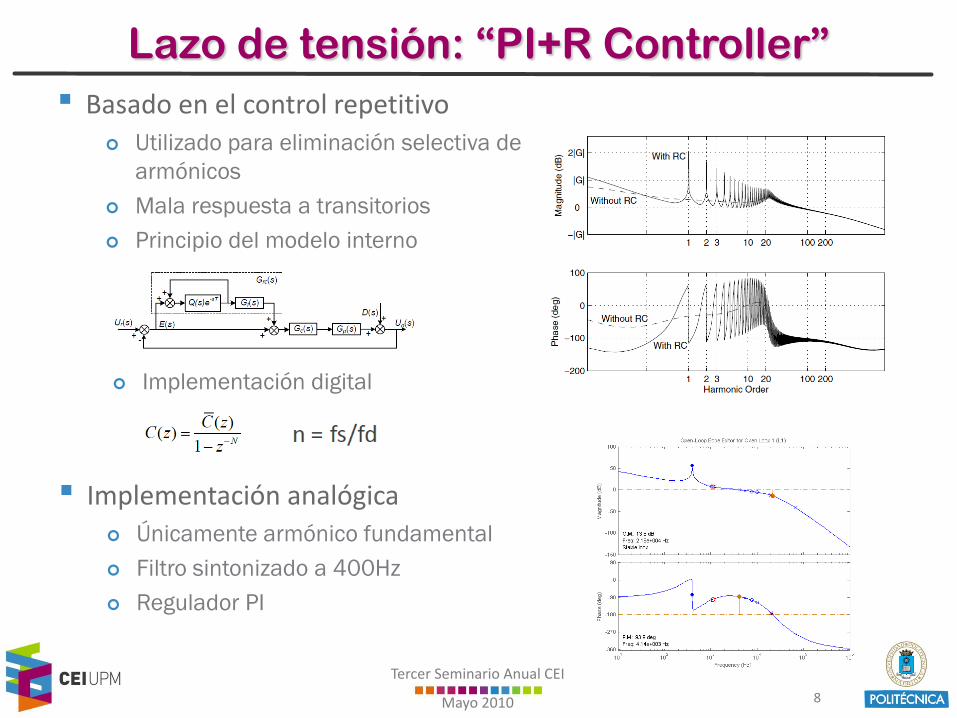
Lazo de tensión: “PI+R Controller”▪ Basado en el control repetitivo
Utilizado para eliminación selectiva de armónicos
Mala respuesta a transitorios Principio del modelo interno
Implementación digital
▪ Implementación analógica Únicamente armónico fundamental Filtro sintonizado a 400Hz Regulador PI

9
Tercer Seminario Anual CEI
Mayo 2010
Lazo de tensión: “PI+R Controller”▪ Diseño filtro 400Hz
Ideal:
Implementación:• Tow-Thomas filter
22
22 2)(os
Qos
osossGAC
ωωωω
+⋅+
+⋅⋅+=
10
Tercer Seminario Anual CEI
Mayo 2010
triang -seno
0.5
filter
s +2*2*pi *400 s+(2*pi *400 )^22
s +2*pi *400 /100 s+(2*pi *400 )^22Vg
-K-
Transfer Fcn 4
num (s)
den (s)Transfer Fcn 3
3333333
1
Transfer Fcn 2
den (s)
9e3/(3.9e3+2.7e
Sine Wave
Scope 4
Scope 3
Scope 2
Scope 1
ScopeSaturation 2 Saturation 1 Saturation
Resistor
-K-
RepeatingSequence
Stair
Product
Kv
-K-
Kisense
-K-
K2
-K-
K1
-K-
Inductor
1s
Ind
-K-
Capacitor
1s
Cap
-K-VoILdCurrent_refVoltage_ref
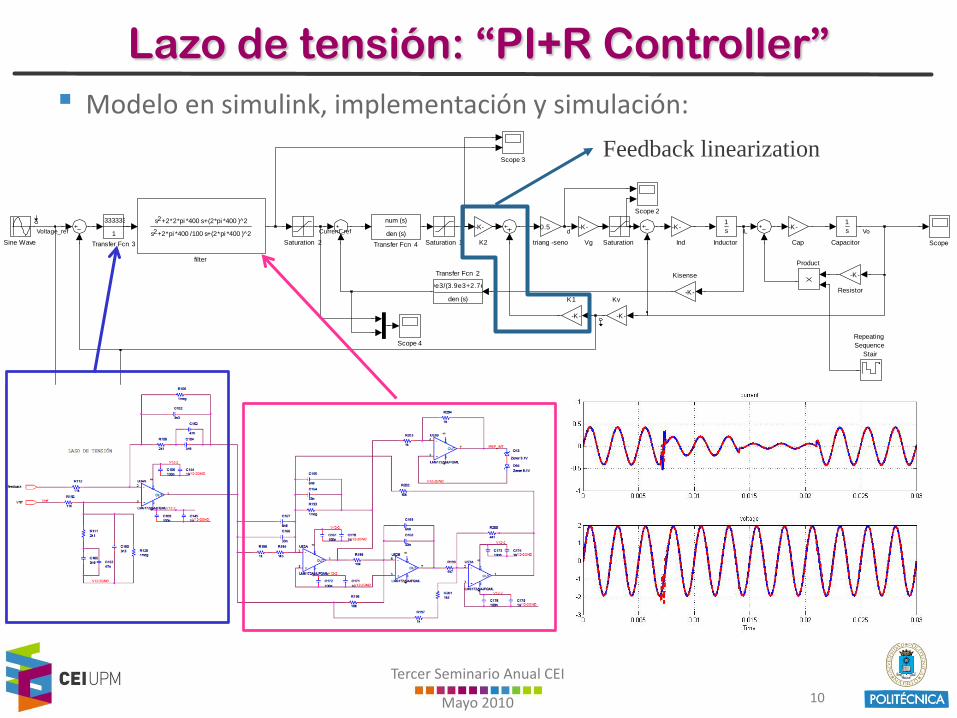
Lazo de tensión: “PI+R Controller”▪ Modelo en simulink, implementación y simulación:
Feedback linearization
11
Tercer Seminario Anual CEI
Mayo 2010
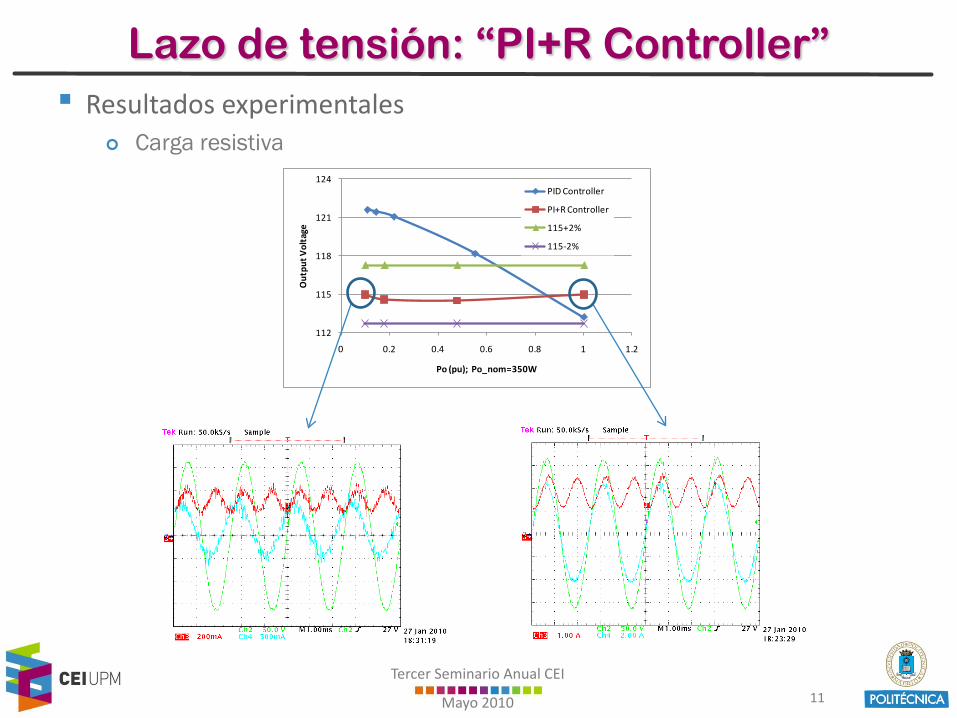
Lazo de tensión: “PI+R Controller”
112
115
118
121
124
0 0.2 0.4 0.6 0.8 1 1.2
Out
put V
olta
ge
Po (pu); Po_nom=350W
PID Controller
PI+R Controller
115+2%
115-2%
▪ Resultados experimentales Carga resistiva

12
Tercer Seminario Anual CEI
Mayo 2010
Modelo de ingeniería▪ Actualmente trabajando en el diseño y montaje del modelo de
ingeniería PCB potencia
Ensamblado PCB potencia-PCB control
Dimensiones

13
Tercer Seminario Anual CEI
Mayo 2010
Resumen ▪ Se presenta un inversor de potencia para ser embarcado en aviones
(115V/400Hz).
Se ha propuesto una estrategia de control para la conexión de inversores en paralelo: maestro-esclavo.
Se han propuesto dos maneras de reducir/eliminar el error en régimen permanente, para ambos lazos de control
Regulador de corriente
Generador PWM
u- +
iref
++Vreg_i
Reguladortensión
-+Vref
Lazo de corriente: realimentación de la tensión de salida.
Lazo de tensión: filtropara incrementar la ganancia a la frecuencia de salida.
Se ha presentado el modelo de ingeniería que se está desarrollando.

ce
i@u
pm
.es
Universidad Politécnica de Madrid
Gracias por su atención