construcciÓn de equipo de gateo para bebÉs con …
TRANSCRIPT

DISEÑO Y MANUFACTURA DE EQUIPO TERAPÉUTICO DE
GATEO PARA BEBÉS CON PARÁLISIS CEREBRAL Y/O RETRASO
DE DESARROLLO PSICOMOTOR
PROYECTO DE GRADO
Laura Vanessa Peña Barrios
Estudiante de Ingeniería Mecánica
Asesor:
Luis Mario Mateus Sandoval
Ingeniero Mecánico, M.Sc.
Universidad de los Andes
Facultad de Ingeniería
Departamento de Ingeniería Mecánica
Bogotá, Colombia
2021

1
Extiendo mis profundos agradecimientos a todas las personas que han
estado presentes en esta y otras etapas de mi vida.
Mi familia, especialmente a mi madre y hermana por su apoyo incondicional, motivación e
inspiración para cumplir todos mis sueños y metas, por nunca cortarme las alas y ser el
motor de mi vida.
Al profesor Luis Mario Mateus por permitirme realizar este proyecto bajo su asesoría, estar
dispuesto a escucharme y guiarme en este proyecto.
La fundación ACONIÑO por abrirme sus puestas para contribuir con su labor, aplicar mis
conocimientos y habilidades en ayudar a los niños y sus familias para los cuales va dirigido
este proyecto. A María Isabel Cetina por su tiempo, consejos y conocimiento compartido.
Mis amigos, que me enseñaron y acompañaron a lo largo de cada experiencia vivida, por su
motivación, confianza y esfuerzo en todos los retos que enfrentamos.
Mi gratitud también hacia el departamento de Ingeniería Mecánica de la Universidad de los
Andes, docentes y administrativos, que con su apoyo y enseñanza han contribuido a las
bases de mi vida profesional y personal.
Especialmente a José Nieto, Edwin Castro, Ramiro Beltrán, Juan Carlos García y Andrés
Salgado, por su tiempo, dedicación, empeño y perseverancia en materializar este proyecto.

2
CONTENIDO
INTRODUCCIÓN ....................................................................................................... 6
OBJETIVOS ................................................................................................................ 7
OBJETIVO GENERAL .......................................................................................................... 7 OBJETIVOS ESPECÍFICOS .................................................................................................... 7
CONTEXTO ................................................................................................................ 8
ACONIÑO ......................................................................................................................... 8 PROCESO DE GATEO ........................................................................................................... 9 PARÁLISIS CEREBRAL INFANTIL (PCI) ............................................................................ 11
Clasificación de la PCI................................................................................................. 11 Desarrollo motor en niños con parálisis cerebral:...................................................... 12
RETRASO DEL DESARROLLO PSICOMOTOR (DPM) ......................................................... 12 Tipificación de retrasos en DPM ................................................................................. 13 Clasificación OMS: Trastorno específico del desarrollo psicomotor ......................... 14 Sintomatología .............................................................................................................. 14
ESTADO DEL ARTE ................................................................................................ 16
RESTRICCIONES Y REQUERIMIENTOS ............................................................. 22
DISEÑO ..................................................................................................................... 24
DISEÑO CONCEPTUAL ....................................................................................................... 24 Sistema de soporte-agarre del bebé.............................................................................. 24 Sistema de sustentación del bebé ................................................................................. 25 Sistema estructural-resistencia de carga ..................................................................... 26 Sistema de plegado-seguro ........................................................................................... 26 Sistema de maniobra y accesorios ............................................................................... 27
DISEÑO PRELIMINAR ........................................................................................................ 27 DISEÑO DE DETALLE ......................................................................................................... 32 CÁLCULOS DEL DISEÑO .................................................................................................... 35
Simulaciones ................................................................................................................. 35 Sistema de plegado: Resorte......................................................................................... 38
MANUFACTURA ...................................................................................................... 40
PROCESOS DE MANUFACTURA .......................................................................................... 40 Arnés y correas ............................................................................................................. 40 Estructura ..................................................................................................................... 44
PRUEBAS ........................................................................................................................... 43 Correas de sustentación: Ensayo de tensión ............................................................... 43

3
Arnés: Verificación de medidas ................................................................................... 46 Ensamble: Prueba de resistencia y estabilidad ........................................................... 48 Ensamble: Prueba con usuario sin retraso en desarrollo psicomotor ....................... 49 Ensamble: Prueba con usuario objetivo ..................................................................... 50
COSTOS ............................................................................................................................. 51
RETROALIMENTACIÓN ........................................................................................ 53
CONCLUSIONES ...................................................................................................... 53
RECOMENDACIONES ............................................................................................ 54
BIBLIOGRAFÍA ....................................................................................................... 55
ANEXOS .................................................................................................................... 60
ANEXO A: MEDIDAS ANTROPOMÉTRICAS DE LA POBLACIÓN OBJETIVO. ....................... 60 ANEXO B: CONFIGURACIONES DE SISTEMA DE PLEGADO. .............................................. 61 ANEXO C: PARÁMETROS Y ECUACIONES PARA EL DISEÑO DEL RESORTE [40]. ............. 62 ANEXO D: VERIFICACIÓN PARA DISEÑO DE RESORTE (SIMULACIÓN). ........................... 64 ANEXO E: INFORMACIÓN TÉCNICA DE RUEDAS. ............................................................. 65

4
FIGURAS
Ilustración 1. Rodillo de estimulación de gatero para bebés [23]. ................................................................... 16 Ilustración 2. Pelota y cubo de estimulación de gateo [24]. ............................................................................ 16 Ilustración 3. Arnés de gateo para bebés [25]. ................................................................................................. 16 Ilustración 4. Juguete de estimulación de gateo [26]. ...................................................................................... 16 Ilustración 5. Gateador creado por la Universidad Autónoma Metropolitana de México [34] ........................ 20 Ilustración 6. Robot SIPPC desarrollado por Thubi Kolobe, Universidad de Oklahoma [35] [36]. .................... 20 Ilustración 7. Boceto del dispositivo realizado por la fisioterapeuta María Isabel Cetina, Aconiño [37]. ........ 21 Ilustración 8. Prototipo de alta resolución del dispositivo elaborado por Moreno [37]. .................................. 21 Ilustración 9. Casa de la calidad del dispositivo [37]]. ...................................................................................... 23 Ilustración 10. Separación estratégica del dispositivo: Sistemas. .................................................................... 24 Ilustración 11. Modos de terapia de gateo tradicional [2]. .............................................................................. 25 Ilustración 12. Diseño conceptual del sistema de sustentación y unión con sistema de apoyo del bebé. ........ 26 Ilustración 13. Análisis cualitativo de estabilidad por distribución de correas. ................................................ 26 Ilustración 14. Sistema de plegado unificado para el dispositivo de gateo. ..................................................... 27 Ilustración 15. Prototipo de baja resolución: Sistema de soporte. ................................................................... 27 Ilustración 16. Prototipo de baja resolución: Sistema de agarre (arnés). ......................................................... 28 Ilustración 17. Prototipo de baja resolución: Configuración del anclaje entre el sistema de soporte y el
sistema de sustentación. .................................................................................................................................. 29 Ilustración 18. Prototipo de baja resolución: Sistema de plegado (configuración interna). ............................. 29 Ilustración 19. Prototipo de baja resolución: Sistema de plegado (configuración externa). ............................ 29 Ilustración 20. Prototipo de baja resolución: fenómeno de pandeo presente en sistema de plegado. ............ 30 Ilustración 21. Sistema de plegado: rediseño. .................................................................................................. 30 Ilustración 22. Prototipo de media resolución: Sistema de soporte-agarre del bebé. ...................................... 31 Ilustración 23. Prototipo de media resolución: Sistema de soporte-agarre del bebé (configuración de sujeción
inferior). ............................................................................................................................................................ 31 Ilustración 24. Diseño de detalle: base acolchada para sistema de soporte. ................................................... 32 Ilustración 25. Prototipo de alta resolución: Arnés de seguridad. .................................................................... 33 Ilustración 26. Diseño de detalle: Sistema de plegado. .................................................................................... 33 Ilustración 27. Brazos interior y exterior (respectivamente) del sistema estructural del equipo. .................... 34 Ilustración 28. Sistema estructural y plegado completo y ensamblado. .......................................................... 34 Ilustración 29. Simulación: Factor de seguridad de base acolchada. ............................................................... 35 Ilustración 30. Simulación: Elongación vertical total de base acolchada. ........................................................ 36 Ilustración 31. Diagrama de cuerpo libre: reacciones sobre base acolchada en 2D. ........................................ 36 Ilustración 32. Simulación: Factor del sistema estructural. .............................................................................. 36 Ilustración 33. Simulación: Elongación en eje X del sistema estructural. ......................................................... 37 Ilustración 34. Simulación: Elongación en eje Y del sistema estructural. ......................................................... 37 Ilustración 35. Simulación: Elongación en eje Z del sistema estructural. ......................................................... 38 Ilustración 36. Resorte del sistema de plegado: Simulación y pieza manufacturada. ...................................... 39 Ilustración 37. Base acolchada ......................................................................................................................... 40 Ilustración 38. Tela acolchada seleccionada para arnés de bebé. .................................................................... 40 Ilustración 39. Accesorios para la sujeción del arnés. ...................................................................................... 41 Ilustración 40. Arnés de seguridad para el equipo acoplado con la base acolchada. ...................................... 41 Ilustración 41. Sistema de desacople del arnés y la base acolchada. ............................................................... 42 Ilustración 42. sistema de sujeción del arnés. .................................................................................................. 42 Ilustración 43. Sistema de graduación en ajuste inferior. ................................................................................ 43 Ilustración 44. Hebilla tipo solapa para el sistema de sustentación. ................................................................ 43 Ilustración 45. Correas de sustentación. ........................................................................................................... 43

5
Ilustración 46. Tubo doblado según las especificaciones de diseño. ................................................................ 44 Ilustración 47. cilindros concéntricos exterior e interior del sistema de plegado. ............................................ 45 Ilustración 48. Soldadura y ensamble de brazos y placas de sellado a los cilindros concéntricos. ................... 45 Ilustración 49. Diseño de anillo para reajuste de holgura. ............................................................................... 45 Ilustración 50. Placa de sellado del sistema de plegado................................................................................... 45 Ilustración 51. Terminaciones roscadas para la unión de rodachines. ............................................................. 40 Ilustración 52. Vista completa del ensamble de brazos soldados. ................................................................... 40 Ilustración 53. Configuración de seguro-pasador del sistema de plegado. ...................................................... 41 Ilustración 54. sistema estructural brillado y pintado. ..................................................................................... 41 Ilustración 55. Rodachina y protector de rodachina. ........................................................................................ 42 Ilustración 56. Dispositivo de gateo y pieza antideslizamiento de correas. ..................................................... 42 Ilustración 57. Probetas para ensayo de tensión del sistema de sustentación. ............................................... 43 Ilustración 58. Montaje de probetas para ensayo a tensión (Hebilla solapa, Hebilla broche y completa). ...... 44 Ilustración 59. Gráfica de resultados a una carga de 1,25LC. .......................................................................... 45 Ilustración 60. Gráfica de resultados a una carga de 2LC. ............................................................................... 45 Ilustración 61. Gráfica de resultados a carga de falla. ..................................................................................... 46 Ilustración 62. Montaje de ensayo estático. ..................................................................................................... 48 Ilustración 63. Restricción de ubicación de correas sobre arnés para estabilidad. .......................................... 49 Ilustración 64. Prueba de usuario sin retraso en desarrollo psicomotor. ......................................................... 50 Ilustración 65. Prueba de usuario en suspensión parcial y total. ..................................................................... 50 Ilustración 66. Ilustración 61. Prueba con usuario de la fundación. ................................................................. 51 Ilustración 67. Esquema de referencia para dimensiones antropométricas [37]. ............................................ 60 Ilustración 68. Primera configuración de sistema de plegado y falencia encontrada. ..................................... 61 Ilustración 69. Segunda configuración de sistema de plegado. ....................................................................... 61 Ilustración 70. Resultados de generador de resortes (Autodesk Inventor). ...................................................... 64
TABLAS
Tabla 1. Tipos de gateo. Adaptado de [9]......................................................................................................... 10 Tabla 2. Desarrollo motor en el niño con PCI [16]. .......................................................................................... 12 Tabla 3. Signos de alerta por Edad del Desarrollo Psicomotor. Tomado de [17] . ............................................ 14 Tabla 4. Dispositivos médicos comerciales disponibles en el mercado............................................................. 17 Tabla 5. Componentes de fuerza en función de ángulo de inclinación de las correas. ..................................... 36 Tabla 6. Límites de deflexión por longitud de viga recomendados [38]. .......................................................... 36 Tabla 7. Simulación: Resultados de deflexión máxima por longitud de viga. ................................................... 38 Tabla 8. Cálculos de diseño para resorte de sistema de plegado. .................................................................... 39 Tabla 9. dimensiones finales del dispositivo de gateo. ..................................................................................... 43 Tabla 10. Factor de seguridad obtenido a partir del ensayo de tensión para correas de sustentación. .......... 45 Tabla 11. Verificación de medidas del arnés. ................................................................................................... 46 Tabla 12. Costo de materiales. ......................................................................................................................... 51 Tabla 13. Costo de procesos de manufactura. ................................................................................................. 52 Tabla 14. Retroalimentación en el cumplimiento de requerimientos del cliente. ............................................ 53 Tabla 15. Dimensiones antropométricas [37]................................................................................................... 60 Tabla 16. Valores de contantes para diseño de resortes a compresión. .......................................................... 62 Tabla 17. Propiedades mecánicas de alambres para resortes. ........................................................................ 62 Tabla 18. Fórmulas de diseño de resortes según sus extremos. ....................................................................... 63

6
INTRODUCCIÓN
El desarrollo infantil es un proceso dinámico que involucra la evolución biológica,
psicológica y social durante los primeros años de vida del ser humano, en esta etapa es donde
se forman las habilidades perceptivas, motrices y cognitivas que le permiten la interacción
con su medio en un futuro [1]. La estimulación durante los primeros años de vida para niños
y niñas con deficiencias motrices y cognitivas es crucial para su desarrollo, pues para muchos
de ellos no hay una curación posible. Sin embargo, una estimulación adecuada puede
contribuir a lograr y mejorar muchas de las habilidades en retraso de formación, evitar
problemas futuros y ayudarlos a convertirse en jóvenes y adultos con mejores condiciones de
vida de la manera más autónoma que sea posible [2].
Una adecuada intervención a temprana edad, junto con factores afectivos, del entorno,
culturales y socioeconómicos pueden favorecer (o dificultar) el desarrollo óptimo de
cualquier ser humano, por lo cual la terapía juega un papel importante en la evolución de
niños que cuentan con estos retrasos psicomotrices. La mayoría de los productos encontrados
en el mercado se dirigen a un consumidor que cuenta con el completo dominio de sus
facultades físicas y mentales correspondiente a su edad cronológica [3], presentando un
obstáculo para muchos padres y centros de rehabilitación al momento de intentar acceder a
los recursos adecuados para apoyar el proceso de estimulación del bebé y que conlleva un
impedimento para la sana evolución de su condición. Otros factores problema para apoyar el
desarrollo del infante es la disponibilidad de recursos económicos suficientes para adquirir
dispositivos de alta tecnología que complementen su proceso.
En el año 2018, se reportan alrededor de 300.000 niños en Colombia con parálisis cerebral
de los cuales el 70% son de bajos recursos, situación que les impide acceder a una
rehabilitación digna, empeorando su calidad de vida [4]. Para bebés con parálisis cerebral,
gatear puede resultar de gran dificultad pues esta lesión afecta el control de sus músculos,
por esta situación muchos niños desisten de intentar controlar sus movimientos sobre el suelo
y en consecuencia su cerebro deja de construir y reforzar las conexiones que contribuyen al
desarrollo motor y orientación espacial, que en el futuro conlleva a problemas relacionados
con el movimiento [5]. En conclusión, una intervención temprana podría mejorar el control
motriz sobre su propio cuerpo, que a su vez aumentaría la probabilidad que un bebé acabase
gateando con independencia, es decir, sin la necesidad que el padre o fisioterapeuta sostenga
su torso o elemento de apoyo permanentemente.
A partir del diseño en ingeniería se puede impactar positivamente sobre las necesidades
actuales que se presentan, en este caso, en el sector salud, específicamente en los centros
donde se ofrece tratamiento por medio de terapia motriz y cognitiva para bebés con
dificultades de desarrollo en estas habilidades; una de ellas es el diseño y construcción de un
equipo de apoyo óptimo para las actividades fisioterapéuticas de gateo dirigidas a bebés entre
los 6 meses y 3 años de edad que requieren de apoyo para fortalecerse y avanzar en sus
procesos de formación y crecimiento.

7
OBJETIVOS
Objetivo General
• Diseñar, manufacturar y evaluar el funcionamiento de un equipo de asistencia
fisioterapéutica en movilidad para estimular el desarrollo de la práctica de gateo en
bebés desde los 6 meses hasta los 3 años con retraso de desarrollo motor, cognitivo
y/o parálisis cerebral infantil.
Objetivos específicos
• Revaluar y complementar el diseño estructural, funcional y ergonómico de un primer
prototipo del equipo en base a los requerimientos y restricciones de la actividad de
terapia asistida.
• Desarrollar un sistema de soporte abdominal que garantice al usuario seguridad,
comodidad y conservar una correcta postura durante el completo uso del equipo de
apoyo.
• Seleccionar materiales, elementos y procesos de manufactura adecuados para la
construcción del sistema con bajos costos y facilidad de replicación.
• Probar el desempeño y funcionamiento del equipo de asistencia fisioterapéutica en el
usuario final.

8
CONTEXTO
ACONIÑO
La asociación Aconiño es una entidad privada sin ánimo de lucro cuyo objetivo es mejorar
la calidad de vida e inclusión social de niños y jóvenes entre los 0 y 18 años diagnosticados
con alteraciones sensoriomotoras ocasionadas por lesiones del sistema nervioso central
(Parálisis Cerebral, Retraso en el Desarrollo Psicomotor, Síndrome de West, entre otros) [6],
a través de servicios de atención integral, capacitaciones y orientación profesional a las
familias de sus pacientes en relación con el desarrollo del niño, sus alteraciones y el
tratamiento que deben brindarle.
En sus instalaciones ofrecen programas terapéuticos divididos según la edad del paciente y
el tipo de atención que necesita. El primero de ellos y en el cual se ve involucrada la población
objetivo del proyecto es dirigido a niños de 0 a 3 años para atención temprana, en este se
busca estimular los sistemas sensoriales (musculoesquelético, neuromotor, vestibular, visual,
etc.) del niño para mejorar su funcionalidad, además de capacitar a las familias en el manejo
y la condición de este.
Las características de los bebés de 0 a 3 años que participan de este programa se enlistan a
continuación [7]:
• Recién nacidos con peso menor a 1.5 kg y/o periodo de gestación menor a 32 semanas
(prematuros).
• Retraso en su desarrollo.
• Neonatos con riesgo orgánico.
• Neonatos con clasificación APGAR menos de 31.
• Pequeño para la edad gestacional.
• Encefalopatía hipóxica-isquémica.
• Enfermedad pulmonar crónica.
• Hemorragia intraventricular y leucomalacia periventricular.
• Principales malformaciones que puedan alterar el neurodesarrollo.
• Síndromes genéticos.
• Enfermedades neurodegenerativas.
Las actividades que conforman el programa se clasifican en 3 etapas principales:
1. Valoración inicial: en esta se identifica al paciente que presenta retardo, inmadurez o
bloqueo en su desarrollo debido a tono postural atípico u otras deficiencias; y permite
planear el tratamiento adecuado basado en sus necesidades individuales.
1 La clasificación APGAR es una puntuación en la escala de 0 a 10 que evalúa rápidamente a un recién nacido para determinar cualquier necesidad o tratamiento inmediato [43].

9
2. Tratamiento: se conforma por las sesiones terapéuticas de motricidad gruesa y fina,
comunicación y motricidad orofacial/deglución/alimentación, psicología y de
relación con la familia.
3. Evolución: esta se registra de forma diaria una vez que el paciente es atendido por
cada una de las áreas, y de forma trimestral a través de un informe entregado a los
padres y a Entidades Administradoras de Planes de Beneficios de Salud.
Las anteriores etapas finalizan con el egreso del paciente al lograr los objetivos propuestos o
su paso al programa para niños de 3 a 18 años.
Este proyecto se enfoca en soportar una de las actividades del tratamiento de motricidad
gruesa, el gateo.
Proceso de gateo
La acción de gatear es definida por la Real Academia de la lengua Española (RAE) como
“andar a gatas, andar como un gato, con cuatro apoyos” y “trepar valiéndose de los brazos y
las piernas” [8]. En otras palabras, cualquier forma de desplazamiento de un lugar a otro
apoyada en las cuatro extremidades corresponde a la acción de gatear y es considerada una
etapa de gran importancia en el desarrollo psicomotor de los niños al marcar una transición
de un recién nacido indefenso a un individuo independiente.
Así mismo, existen varios mitos alrededor del tema, como en la edad a la cual debería
empezar el niño a gatear, la forma correcta o normal en la que debería realizarse, entre otros.
Sin embargo, investigaciones científicas han demostrado la existencia de varios y diferentes
estilos de gateo dependiendo de la edad, maduración neuronal, dimensiones corporales o
desarrollo musculo esquelético [9]. Un 82% de los bebés gatean sobre manos y rodillas, un
1% se arrastra sobre el abdomen, un 9% sobre una posición sentada y un 7% se salta el gateo
y empieza directamente a caminar [10].
La experiencia de movimiento y exploración del entorno que adquiere el niño asociadas al
gateo se consideran esenciales para el desarrollo general de las habilidades motoras en
concepto de percepción visual espacial y mejora del equilibrio. Existen varios autores que
estudiaron e identificaron diferentes tipos de gateo, sin embargo, Patrick et al. [11] es el único
estudio que analiza la biomecánica de esta actividad en los 6 tipos de gateo que identificaron
en su investigación, comparado con otros autores encontrados en la bibliografía como Adolf
et al. [12] y Jiménez [13]. Estos se describen a continuación:
1. Gateo estándar: el bebé cuenta con apoyos en las manos y rodillas. La biomecánica
en este tipo de gateo inicia con la fase de apoyo de una de las piernas, mientras el
brazo del mismo hemicuerpo y la otra pierna se balancean (fase de oscilación), luego
se repite la fase de apoyo con la otra pierna, mientras la fase de oscilación utiliza el
brazo del mismo hemicuerpo de esta y la otra pierna. Para su ejecución el niño
involucra el cuádriceps, el recto femoral, el tríceps branquial, las rodillas y la cadera.
2. Gateo de oso: el niño se apoya sobre las manos y pies y la biomecánica experimenta
la misma configuración de apoyos y balanceos que el gateo estándar, por lo que la

10
musculatura involucrada en el movimiento es la misma, con la diferencia que el bebé
apoya el pie en lugar de la rodilla.
3. Arrastre: en este tipo de gateo, el niño deja la barriga en contacto con el suelo y avanza
con ayuda de los brazos y piernas. A medida que un brazo y pierna de hemicuerpos
diferentes se balancean, las extremidades restantes se extienden y flexionan para
empujar el cuerpo hacia delante, luego se intercambia de hemicuerpo.
4. Gateo sentado o de glúteo: el bebé se encuentra sentado y utiliza la flexión de las
piernas en este gateo para avanzar en el movimiento (fase de apoyo), mientras que la
fase de oscilación se asocia a la extensión de la rodilla. Los músculos involucrados
corresponden a los isquiotibiales y cuádriceps, la cadera no muestra movimiento.
5. Mezcla paso a paso o rastreador mixto: es una combinación de la forma estándar y de
oso donde el niño utiliza una pierna y la rodilla de la extremidad inferior restante para
avanzar, estas se extienden en la fase de apoyo y se flexionan en la fase de balanceo.
6. Gateo de remo: en este tipo de gateo el bebé está sentado y utiliza una pierna (rodilla
y pie) para inclinarse hacia adelante junto con una mano como fase de apoyo brazo,
en la fase de oscilación primero se balancea la pierna apoyada y luego la otra
extremidad volviendo a la postura inicial.
Tabla 1. Tipos de gateo. Adaptado de [9].
Tipo de
gateo Fase de apoyo Fase de oscilación Fase de apoyo Fase de oscilación
Gateo
estándar
Gateo de
oso
Arrastre
Gateo
sentado
Mezcla
paso a paso
Gateo de
remo

11
Parálisis cerebral infantil (PCI)
La parálisis cerebral infantil es un tipo de trastorno neurológico, heterogéneo y crónico de
comienzo temprano que con mayor frecuencia genera discapacidad en la infancia afectando
el movimiento o la postura del paciente y su origen se asocia a una lesión producida en un
cerebro inmaduro [14]. Comúnmente, a su diagnóstico se asocian otras alteraciones como la
epilepsia, retraso mental, déficit sensoriales, visuales o auditivos, trastornos de aprendizaje y
de conducta que desfavorecen el pronóstico y la evolución del paciente, por lo que es
importante extremar la vigilancia y abordar un tratamiento terapéutico en el niño. Factores
sociales cobran importancia en torno a la discapacidad del paciente como la angustia familiar,
disponibilidad de recursos sociales y económicos, entre otros. La prematuridad se relaciona
en el 45% de los casos y la distribución por sexos presenta una relación aproximada de 1,5/1
para niños y niñas respectivamente.
Clasificación de la PCI
El diagnóstico clínico de pacientes con PCI es variable en el tiempo y con individualidad
para cada uno de los casos. Existen diferentes formas de clasificar el cuadro clínico de un
niño con este diagnóstico; en función de la extensión del daño cerebral y miembros afectados
(clasificación topográfica) se distinguen cuatro tipos de parálisis cerebral [15]:
1. Tetraplejía: el paciente presenta afección de su tronco y las cuatro extremidades (con
predominio en las extremidades superiores).
2. Diplejía: afecta las cuatro extremidades del paciente (con predominio en
extremidades inferiores).
3. Hemiplejía: solo un lado del cuerpo del paciente se ve afectado (con predominio del
miembro superior).
4. Doble hemiplejía: afecta las cuatro extremidades del paciente (con predominio en un
hemicuerpo).
Por otro lado, en función del tipo de perturbación en el movimiento también se pueden
establecer cuatro formas de parálisis cerebral:
1. Espástica: el paciente presenta hipertonía e hiperreflexia con rigidez y contracturas
musculares de una o varias extremidades, otros síntomas que pueden presentare son
temblores hemiparéticos en forma de sacudidas incontrolables que afectan las
extremidades en un hemicuerpo. Esta llega a afectar al 70-80% de los diagnosticados.
2. Atetósica o Discinética: el paciente presenta movimientos involuntarios, lentos y
retorcidos en diferentes partes de sus extremidades, cara y lengua como muecas,
babeo, disartria, entre otros. La padece el 10-20% de la población afectada.
3. Atáxica: el paciente padece de inestabilidad en la marcha, temblores de intención y
dificultad para coordinar movimientos rápidos y precisos. Afecta al 5-10% de los
enfermos.
4. Formas combinadas: Son de alta frecuencia, las combinaciones más comunes son
entre la forma espástica y atetósica.

12
Desarrollo motor en niños con parálisis cerebral:
El desarrollo motor de un niño con PCI cuenta con patrones anormales y desordenados en las
primeras etapas de su vida. En la Tabla 2 se destacan esas alteraciones del desarrollo que
afectan habilidades en el infante y son derivadas del problema neuromotor, cabe resaltar que
su presencia depende de la gravedad de la lesión.
Tabla 2. Desarrollo motor en el niño con PCI [16].
MESES DESARROLLO
6-7
meses
Son evidentes alteraciones del tono muscular en las extremidades inferiores
e impedimento de enderezamiento corporal que no le permite tener una
postura sentada.
8-9
meses
Es poco probable que se pueda sentar y si lo consigue es de manera anormal.
Además, los reflejos primarios persisten acentuadamente.
12
meses
Intenta ponerse de pie, inclinando la cabeza hacia atrás y extendiendo todo
el cuerpo. Puede coger objetos con la mano, pero sin llegar a la coordinación
fina para realizar la pinza.
15
meses
Es improbable que consiga gatear o caminar, excepto los afectados con una
parálisis cerebral muy leve o unilateral.
24-36
meses
Los afectados con una parálisis cerebral leve podrán mostrar cierta
autonomía motriz con un patrón anómalo, pero en los niños con PCI grave
sigue dominada por el comportamiento reflejo que impide el control de los
movimientos voluntarios. Además, carecen de capacidad para controlar su
comportamiento motor.
Retraso del desarrollo psicomotor (DPM)
El Desarrollo Motriz se define como la progresión de etapas, cada vez más complejas, que
atraviesa un niño para lograr tres habilidades generalizadas [17]:
1. Habilidades motrices gruesas: aquellas que involucran los músculos grandes como
mantener una postura erguida, el equilibrio, la movilidad, controlar la cabeza,
sentarse, pararse, gatear, entre otros.
2. Habilidades motrices finas: controladas por músculos pequeños como manipular
objetos (agarrar, soltar, mover, etc.)
3. Habilidades orales-motoras: como comer, tragar, producir sonidos y hablar.
La detección e intervención temprana de un retraso en el DPM ofrece la oportunidad de
corregir la mayoría de las alteraciones y atenuar otras, siendo una estrategia altamente
efectiva con relación al costo. Por lo anterior, comunidades científicas como la Academia
Americana de Pediatría, recomiendan una vigilancia sistemática y permanente del desarrollo
psicomotriz en todos los controles de salud infantil. La prevalencia estimada de alteraciones
del DPM es de un 12-16% en países industrializados y esta cifra aumenta significativamente
en aquellos con ambientes que poseen dificultades escolares.
El diagnóstico de esta condición en un niño de hasta 3 años, implica que se presenta una lenta
y/o cualitativamente alterada adquisición de habilidades motrices como coordinación de

13
movimientos, habilidades de comunicación como el habla o interacción social y/o
habilidades para resolver problemas apropiados para su edad [18]. Cabe resaltar que su origen
puede deberse a múltiples factores, desde escasa estimulación en el entorno hasta
enfermedades neurológicas severas, así como su persistencia puede ser un indicio de un
futuro diagnóstico de retraso mental.
En general, si al año y medio de edad el niño no dice ninguna palabra y/o no camina, es
recomendable visitar a un especialista para descartar la posibilidad de algún problema del
desarrollo físico y cognitivo del niño, sin ser una situación de la cual alarmarse en primera
instancia o asociar a una condición anormal.
Algunos ejemplos de variaciones sin carácter patológico son pinzas entre dedo pulgar y
medio, desplazamiento sentado o apoyando una rodilla y un pie o rodando sobre sí mismo,
rotación persistente de la cabeza, entre otras; ya que cada niño lleva un proceso de
crecimiento individual. Por ejemplo, un tercio de los niños nunca gatea, a pesar de ser un
signo más tranquilizador cuando se presenta, no debe ser de alarma si se ausenta [19].
Tipificación de retrasos en DPM
Estático Vs. Regresivo
El tipo de retraso regresivo se diferencia del estático en cuanto a que este último se caracteriza
como un desarrollo más lento o tardío de los hitos de desarrollo en el niño, mientras que en
los casos de retraso regresivo el niño ha demostrado un previo desarrollo psicomotor normal
y empieza a presentar una pérdida evidente de las habilidades o desarrollos adquiridos, este
diagnóstico se encuentra acompañado típicamente de nuevos signos neurológicos,
deficitarios o anormales y es un problema preocupante.
Debido a la naturaleza del problema neurológico y la subjetividad familiar sobre los pacientes
con retraso en DPM, los procesos pueden ser intercurrentes2 y verse alterados
transitoriamente, sin dejar de ser problemas estáticos, como es el caso de la parálisis cerebral.
Parcial Vs. Global
Esta tipificación se diferencia por las áreas del desarrollo que se ven afectadas en el
diagnóstico de DPM anormal, mientras que el retraso global hace referencia a todas las áreas,
el tipo parcial apunta de forma particular a la afección de un área específica (motriz, lenguaje,
adaptación social, etc.) y a la cual se dirige el diagnóstico del problema base.
Sin embargo, esta diferenciación no es tan clara debido a que es posible y común encontrar
retrasos de tipo global con áreas notoriamente más afectadas que las restantes. Por ejemplo,
un niño con parálisis cerebral puede mostrar un predominante retraso en el área motora que
tipifica el diagnóstico, cuando la intensidad del contraste entre áreas es muy grande se
recomienda referirse a esa área de manera específica.
2 Intercurrentes: Discrepancia, divergencia o alteración de un padecimiento o enfermedad con el tiempo.

14
Clasificación OMS: Trastorno específico del desarrollo psicomotor
La Organización Mundial de la Salud (OMS) a través de la Clasificación Internacional de
Enfermedades y problemas relacionados con la salud (CIE-10), ha estandarizado el
diagnóstico de trastornos mentales y de comportamiento en su capítulo V, permitiendo una
diferenciación entre estos, conocimiento del estado clínico, factores ambientales relevantes
y el grado de incapacidad ligado a la enfermedad [20]. Entre ellos se encuentra la
clasificación F80-F89 Trastornos del desarrollo psicológico que incluye el F82: Trastorno
específico del desarrollo psicomotriz [21], que consiste en el deterioro del desarrollo de la
coordinación motriz, que no es exclusivamente explicable desde un retraso intelectual
generalizado a pesar de que según estudios clínicos demuestran causas arraigadas a la
inmadurez del desarrollo neurológico. Sus síntomas son tales como movimientos
coreiformes3 de las extremidades sin apoyo, movimientos en espejo y otras alteraciones
motrices asociadas, como también signos de deterioro de las coordinaciones motrices fina y
gruesa.
Sintomatología
El niño puede presentar signos de alerta según la edad:
Tabla 3. Signos de alerta por Edad del Desarrollo Psicomotor. Tomado de [17] .
Edad Síntomas
6 meses
• Presencia de hipertonía en miembros e hipotonía de cuello y
tronco.
• No se rota sobre sí mismo.
• Persistencia de reacción de Moro4.
• No sedestación con apoyo.
• Ausencia de presión voluntaria.
• No balbucea.
9 meses
• No se desplaza autónomamente.
• Hipotonía de tronco.
• No se mantiene sentado.
• Ausencia de pinza manipulativa.
• No emite bisílabos.
12 meses
• Ausencia de bipedestación.
• Presencia de reflejos anormales.
• No vocabulario de dos palabras con/sin significado.
• No entiende órdenes sencillas.
15 meses
• No camina solo.
• Ausencia de pinza superior.
• No arroja objetos.
• No tiene un vocabulario de tres o cuatro palabras.
3 Movimientos coreiformes: Son movimientos irregulares, no predecibles y de corta duración que cambian repentinamente de zona corporal afectada a otra sin secuencia definida. 4 El reflejo de Moro es un tipo de respuesta involuntaria que se observa en recién nacidos y que normalmente desaparece después de 3 o 4 meses [44].

15
• Pasa ininterrumpidamente de una actividad a otra.
18 meses
• No sube escaleras.
• No tiene un vocabulario de 7/10 palabras.
• No conoce partes del cuerpo.
• No garabatea espontáneamente.
• No bebe de un vaso.
• No hace una torre de dos cubos.
24 meses
• No corre.
• No construye torres de 3 o 6 cubos.
• No asocia dos palabras.
• No utiliza la palabra “NO”.
• Presencia de estereotipas verbales.
• Incapacidad de juego simbólico.
Adicionalmente, a cualquier edad puede presentar:
• Movilidad, tono o postura anormal.
• Movimientos involuntarios (actitud distónica de manos, hiperextensión cefálica).
• Movimientos oculares anormales.
• Retraso en la adquisición de los ítems madurativos.
• Macrocefalia, microcefalia, estancamiento del perímetro del cráneo.

16
ESTADO DEL ARTE
Como se nombró anteriormente, en el mercado existe diversos dispositivos diseñados para
apoyar el desarrollo motriz de bebés en su etapa de gateo; sin embargo, estos no cumplen con
los requerimientos de seguridad y accesibilidad de un bebé con parálisis cerebral que presenta
dificultad para realizar movimientos voluntarios, mantener una marcha estable, tener control
de sus extremidades o rigidez suficiente en su torso [22] de manera que le permita moverse
autónomamente, sin la asistencia directa de su padre/madre o fisioterapeuta.
Algunos de estos dispositivos son rodillos, balones o estructuras acolchadas (Ilustración 1 y
2), arneses comerciales o su equivalente ubicando telas en el torso del bebé (Ilustración 3) y
apoyos deslizantes (Ilustración 4), entre otros.
Ilustración 1. Rodillo de estimulación de gatero para bebés [23].
Ilustración 2. Pelota y cubo de estimulación de gateo [24].
Ilustración 3. Arnés de gateo para bebés [25].
Ilustración 4. Juguete de estimulación de gateo [26].

17
En la industria de dispositivos médicos algunas compañías han diseñado equipos de
asistencia para ayudar a niños con parálisis cerebral o deficiencia psicomotriz a contar con
herramientas adecuadas para mejorar su evolución a lo largo de sus tratamientos. Algunos de
los que se encuentran actualmente disponibles en el mercado se presentan en la tabla a
continuación:
Tabla 4. Dispositivos médicos comerciales disponibles en el mercado.
IMAGEN DESCRIPCIÓN PRECIO5
Gateador con altura
ajustable [27]
Marca: India Medico
Instrument
Materiales: Acero con
recubrimiento
(estructura) y Rexen
(hamaca).
Hamaca reclinable.
Para niños de 2 a 6 años.
4,200 Rs6 =
204,899
COP
Gateador graduable
[28]
Marca: Ortotecsa
Materiales: Estructura
metálica, rematada en
cromo y poliéster.
Tapicería ignifuga7 M2.
Hamaca desmontable.
Graduable en altura e
inclinación.
No reporta
5 TRM al 12 de noviembre del 2020. 6 Rupias de la India. 7 No inflamable, resistente al fuego. [42]

18
Gateador infantil [29]
Marca: Meyland
Discover
Disponible en 2 tallas
(ancho de la tela de
apoyo de 18 cm/24cm).
Altura regulable desde
10 cm hasta 21 cm.
Carga máxima: 18 kg.
Peso: 4kg.
620€ =
2’667,455
COP
CRAWL TRAINER
[30]
Marca: Drive Medical.
Altura ajustable.
Disponible en 2 tallas:
S: (estructura) 22”-25” x
23” x 18” / (Arnés) 12” x
9”.
M: (estructura) 26”-29” x
23” x 23” / (Arnés) 14” x
1”.
Carga máxima: 50 lbs.
Materiales: Aluminio
(estructura) y espuma
acolchada (arnés)
890.68 USD
= 3’245,682
COP
Skillbuilders Crawler
[31]
Marca: eSpecial Needs
Hamaca inclinable.
Altura ajustable de 11.5”
a 15.25”.
Ancho de 14”
Para niños entre 3 y 9
años.
Materiales: Cuero
sintético impermeable.
Carga máxima: 90 lbs.
Peso: 16 lbs.
112.95 USD
= 411,595
COP

19
Video: https://www.youtube.com/watch?v=v3zxNfT6lWE
RedBarn Creepster
Crawler [32]
Materiales: Marco de
aluminio y arnés
acolchado de espuma.
Disponible en 2 tallas:
S (de 1 a 5 años): 21.5” x
23” x 18.5” (7 lbs), arnés
12” x 8”, altura del arnés
desde el suelo 3”-10”,
carga soportada 50 lbs.
M (de 5 a 10 años): 24.5”
x 23” x 22.5” (10 lbs),
arnés 15” x 12”, altura
del arnés desde el suelo
5”-10”, carga soportada
75 lbs.
599 USD =
2’182,786
COP
Video: https://www.youtube.com/watch?v=aHQL_mFJ_Rw&feature=share
CrawlAhead [33]
Marca: LiteGait
Para bebés de hasta
18kg/89 cm.
Peso: 1.8 kg.
Dimensiones: (plegado)
35 x 35 x 20 cm.
(ensamblado) 91.4 x 91.4
x 55.9 cm.
Arnés de 10”-18” x 16”-
27”.
735.90 USD
= 2’681,656
COP
Adicionalmente, en el ambiente académico e investigativo se han diseñado dispositivos de
asistencia de gateo para niños con discapacidades que afectan su desarrollo motor. Un primer
diseño encontrado, presentado en la Ilustración 5, fue creado por alumnos de la Universidad

20
Autónoma Metropolitana en México, el cual cuenta con un sistema estructura arnés de 4
apoyos similar a algunos de los modelos comerciales presentados anteriormente.
Ilustración 5. Gateador creado por la Universidad Autónoma Metropolitana de México [34]
Un segundo diseño, desarrollado por Thubi Kolobe, fisioterapeuta e investigadora de la
Universidad de Oklahoma llamado Gateador de Progresión Autoiniciada en Decúbito Prono
(SIPPC) [35] se puede observar en la Ilustración 6. Este cuenta con un robot integrado,
programado de un algoritmo de aprendizaje automático que detecta a través de sensores las
intenciones de desplazamiento del bebé con patadas o inclinaciones y lo traduce en el
desplazamiento de la estructura impulsando al niño. Dentro de los resultados obtenidos en
los ensayos prácticos de uso del dispositivo se encontró un aumento en la probabilidad de
que los niños lograran gatear autónomamente.
Ilustración 6. Robot SIPPC desarrollado por Thubi Kolobe, Universidad de Oklahoma [35] [36].
Como se indicó en los objetivos específicos del proyecto, se cuenta con un diseño preliminar
y primer prototipo de media-alta resolución del equipo de asistencia en terapias de gateo
antes del desarrollo del presente proyecto, trabajo realizado por la estudiante Mariana
Moreno Peña [37]. El diseño base se desarrolló en torno a los requerimientos comunicados
por una profesional del área de la fisioterapia, identificando las necesidades a las que se
enfrenta en su labor.

21
En el trabajo realizado por Moreno, se construyeron tres prototipos de baja resolución que
permitieron identificar las estructuras y mecanismos que integrarían el dispositivo, dando
paso a un primer acercamiento de su funcionamiento final y los posibles inconvenientes que
se podrían presentar en su manufactura; llegando así, a un prototipo final de alta resolución
que definió una estructura central, un sistema plegable usando cilindros de rotación
concéntricos y una pieza con función de seguro para restringir la acción del sistema de
plegado en sus dos posiciones funcionales, una completamente plegado que facilitaría su
almacenamiento y una correspondiente a la disposición durante su uso. Adicionalmente, se
desarrolló un diseño de detalle teniendo en cuenta las medidas, cargas estimadas que se debe
soportar el dispositivo, entre otros requerimientos planteados.
Ilustración 8. Prototipo de alta resolución del dispositivo elaborado por Moreno [37].
Ilustración 7. Boceto del dispositivo realizado por la fisioterapeuta María Isabel Cetina, Aconiño [37].

22
RESTRICCIONES Y REQUERIMIENTOS
El ambiente en el que se desempeñara el dispositivo construido debe contemplar las
limitaciones y necesidades de este, por lo cual a continuación, se trazan las condiciones que
debe cumplir una vez finalizado el proyecto y que serán de gran utilidad al momento de
evaluar el producto terminado.
En primer lugar, se trae a consideración que el equipo debe ser apto para niños dentro del
rango de edad del usuario planteado en los objetivos del proyecto, desde los seis meses hasta
los tres años. Esto indica que las medidas de los accesorios que permitirán el ajuste del bebé
deben ser adaptables a los diferentes tamaños y anatomías de estos.
Factores como comodidad, seguridad, durabilidad y estabilidad son importantes tanto para el
usuario, siendo este el niño; como para el cliente, que en este caso es tanto el padre/madre
como el profesional encargado de la fisioterapia. A continuación, se trazan a mayor detalle
los requerimientos y restricciones basados en el acercamiento y experiencia de diseño
realizado por la estudiante de ingeniería mecánica Mariana Moreno Peña [37].
• El equipo debe adaptarse al rango de medidas anatómicas de los niños entre los seis
meses y tres años, como son la longitud de extremidades y el área abdominal.
• Debe estimular la sensibilidad del área abdominal del niño.
• Las dimensiones no deben superar los 60x60 cm en el plano horizontal.
• Debe ser de fácil plegado o desarme, al igual que su armado o desplegado debe
permitirse realizarse con rapidez y de manera intuitiva.
• Se debe minimizar su peso lo mayor posible (materiales de baja densidad).
• Debe permitir al bebé desarrollar la actividad de gateo de manera autónoma.
• Debe soportar a todo niño dentro del rango de edad teniendo en cuenta el peso de
estos (resistencia a la carga).
• Debe contar con estabilidad completa durante su funcionamiento.
Adicionalmente, se buscará que los costos de materiales y manufactura del dispositivo sea lo
más económico posible, pensando en un rediseño orientado a la facilidad de manufactura y
ensamble.
Contando con la colaboración de un profesional del área de fisioterapia, fue posible construir
una casa de la calidad, de donde se obtuvo el orden de importancia de los aspectos de
ingeniería considerados para el diseño, en relación con los requerimientos expuestos por el
cliente.

23
Ilustración 9. Casa de la calidad del dispositivo [37]].
Siendo los aspectos más importantes para tener en cuenta en el diseño la fuerza de
movimiento que debe emplear el bebé, el peso del dispositivo y la resistencia a la carga.

24
DISEÑO
Diseño conceptual
A partir del prototipo elaborado por Moreno [37], se realizó la identificación y separación
estratégica del dispositivo en sistemas para un mejor análisis y evaluación de los mismos ante
el propósito de mejora y corrección.
El análisis y propuestas iniciales de diseño del nuevo dispositivo se presentan a continuación.
Sistema de soporte-agarre del bebé
Como primera instancia se consultó la opinión y perspectiva del experto (fisioterapeuta), en
base al diseño actual del sistema, a partir de la cual se obtuvo los siguientes aspectos
importantes por conservar y mejorar:
• El soporte abdominal del sistema debe ser rígido, de tal forma que evite que el niño
adquiera una mala postura durante su uso.
• Debe ser seguro y firme, ya que los niños para los cuales está dirigido el proyecto no
cuentan con la capacidad de controlar sus movimientos de manera voluntaria y debe
evitarse cualquier riesgo a sufrir una lesión por inestabilidad. En base a lo anterior,
es necesario agregar elementos de protección como cinturones o un sistema de arnés
que mantenga al usuario en el dispositivo sin riesgo de sufrir caídas o cambios
peligrosos de ubicación durante su uso.
• Debe ser cómodo y estimulante para el bebé de tal forma que no inhiba su libre
desarrollo de movimientos, además de ser fácil de limpiar luego de su uso ya que
muchos de los niños en esa etapa babean. Así que se concibió la necesidad de trabajar
con materiales acolchados, pero con cobertura impermeable.
Ilustración 10. Separación estratégica del dispositivo: Sistemas.

25
A partir de la identificación de necesidades generales e investigación complementaria en
manuales de fisioterapia disponibles en la bibliografía, se plantearon los elementos
específicos que se desean incluir en el diseño, los cuales son:
• Necesidad de soportes laterales, en reemplazo de manos o telas utilizadas
comúnmente en los mecanismos de terapia asistida actualmente.
Ilustración 11. Modos de terapia de gateo tradicional [2].
• Mantener la base rígida con incrustación de acolchado superior, cambiando
materiales para facilitar la limpieza del sistema y utilizando la cobertura en la
totalidad de la base.
• Implementar tres sujeciones con base al completo soporte del cuerpo del bebé en el
dispositivo, distribuidas de la siguiente forma:
1. Sujeción superior: Cubre las áreas del pecho, hombros y espalda alta; con el fin
de evitar que el niño se deslice hacia delante.
2. Sujeción intermedia: Cubre las áreas del abdomen y torso; con el fin de evitar que
el niño realice rotaciones.
3. Sujeción inferior: Cubre las áreas de la espalda baja, glúteos y entrepierna; con el
fin de evitar que el niño se deslice hacia atrás y junte los aductores.
• Utilizar un acople al sistema de sustentación de mínimo 4 puntos para garantizar
estabilidad que restrinja rotación del dispositivo en sus 3 grados de libertad (rotación
hacia delante, lateral y vertical).
Sistema de sustentación del bebé
Por otro lado, en cuanto al sistema de sustentación, teniendo en cuenta observaciones
realizada por la fisioterapeuta y recomendaciones de Moreno al final de su trabajo, se
identificó la necesidad de rediseñar la configuración de las correas de tal forma que el sistema
que controla el largo de estas gradualmente no deje sobrantes de correa libres que puedan
interferir con el movimiento del niño o presentar un potencial riesgo por enredarse en los
demás sistemas del dispositivo.
Además, teniendo en cuenta la decisión de utilizar mínimo 4 puntos de agarre con el sistema
de sustentación, facilitar la limpieza, acomodar y ajustar al niño en el sistema de soporte, se
tomó la decisión de utilizar broches en el sistema de sustentación que permitan el acople y
desacople de ambas partes.

26
Ilustración 12. Diseño conceptual del sistema de sustentación y unión con sistema de apoyo del bebé.
Adicionalmente, considerando el requerimiento de alta estabilidad del bebé durante el uso
del dispositivo, se reevaluará la ubicación de la unión de las correas con el sistema estructural
de tal manera que se busca prevenir el balanceo del niño, ya que este se encuentra suspendido
por correas.
Ilustración 13. Análisis cualitativo de estabilidad por distribución de correas.
Sistema estructural-resistencia de carga
En cuanto al diseño estructural del dispositivo, se consideró importante nivelar las vigas que
soportan el peso de la estructura y el bebé, ya que es un foco de potencial inestabilidad que
se extiende al correcto funcionamiento de las correas en cuanto a este aspecto específico.
Sistema de plegado-seguro
A partir de la evaluación de costos asumidos en la fabricación del elemento que asegura la
ubicación de las vigas de la estructura y su posibilidad de separarse del dispositivo, se
determinó que era necesario reemplazarlo por un mecanismo más seguro y económico. Para
abordar el problema de seguridad se considera necesario incluir un elemento que mantenga
las dos partes unidas durante el uso del dispositivo y que permita cambiar de posición las
vigas si se interviene a voluntad externamente por la acción de la persona a cargo de
supervisar al niño, ya sea la fisioterapeuta, padre o acudiente. Para ello se seleccionó un
resorte que en su estado de reposo mantenga la ubicación del seguro sobre la estructura y al

27
comprimirse por la aplicación de una fuerza manual permita girar las vigas y plegar el
dispositivo.
Ilustración 14. Sistema de plegado unificado para el dispositivo de gateo.
Sistema de maniobra y accesorios
De igual forma, se encontró que el costo de los accesorios responsables de cubrir las ruedas
y permitir la maniobrabilidad del dispositivo por parte de la fisioterapeuta fue elevado y un
punto a trabajar para reducir sus precios, para ello se considerarán alternativas comerciales
disponibles en el mercado a precios más económicos para adaptarlos al dispositivo.
Diseño preliminar
A partir del diseño conceptual de cada uno de los sistemas identificados, se elaboraron varios
prototipos de baja, media y alta resolución del equipo y sus sistemas que permitieron
entender, materializar y evaluar el funcionamiento, puntos a mejorar y prever fallas antes de
llevar a cabo el diseño a detalle y la manufactura final.
Como primera aproximación se construyó un primer prototipo de baja resolución orientado
a identificar la viabilidad de manufactura de las modificaciones ideadas para el dispositivo.
Ilustración 15. Prototipo de baja resolución: Sistema de soporte.

28
En la Ilustración 15 se presenta la idea de diseño del soporte acolchado, el cual se basó en el
proceso de manufactura de los asientos de gimnasio que cuentan con una base rígida de
madera o metálica y varias capas de relleno acolchado que posteriormente son cubiertas por
tela sintética, como cuerina, por temas de higiene ante el sudor, razón por la cual se consideró
una referencia adecuada para el requerimiento de aseo ante babeos de los niños.
Por otro lado, en los puntos por mejorar se identificó que utilizar soportes laterales fijos y
con el mismo diseño restringe el tamaño del dispositivo y así el ajuste según la edad del niño,
por lo cual se pensó una estructura que se adapte a la forma y circunferencia del torso del
bebé.
De igual forma, se construyó el complemento del sistema responsable del agarre y seguridad
del niño al momento de estar sobre el soporte. Ubicando las tres sujeciones planteadas en el
diseño conceptual se identificó dificultad en el acople de la sujeción inferior, ya que por el
tamaño del soporte y la configuración que pretende graduar el largo para los diferentes
tamaños, el espacio disponible es limitado; por lo cual se encuentra la necesidad de
simplificar el diseño además de cambiar la geometría del soporte al que se une, pensando en
la anatomía del bebé y su comodidad en la entrepierna.
Ilustración 16. Prototipo de baja resolución: Sistema de agarre (arnés).
Por otro lado, el sistema de acople y desacople del soporte con el sistema de sustentación se
evidencia en la Ilustración 17, donde los puntos de anclaje se ubicaron en la cara inferior del
soporte abdominal y que deberá contar con hebillas que soporten las cargas a las cuales se
enfrentará el dispositivo en su uso. El sistema de sustentación es representado por las cintas
color rojo en la misma ilustración, para el sistema de control de largo se prevé la necesidad
de hebillas de solapa a presión.

29
Ilustración 17. Prototipo de baja resolución: Configuración del anclaje entre el sistema de soporte y el sistema de sustentación.
Finalmente, las Ilustraciones 18 y 19 presentan el sistema de plegado construido para el
prototipo, en este se encontró que en la pieza exterior (color rosado) la remoción del material
de la pieza inicial es significativa, producto de la necesidad de canales para los brazos
interiores, además de no ser ergonómica si se tiene en cuenta que para accionar el sistema se
debe cargar el peso de la mitad de la estructura al levantar los brazos externos para girarlos.
Ilustración 18. Prototipo de baja resolución: Sistema de plegado (configuración interna).
Ilustración 19. Prototipo de baja resolución: Sistema de plegado (configuración externa).
Relacionado con la identificación de zonas con poco material, se encontró que la pieza
externa es propensa a sufrir de pandeo, lo cual puede afectar su funcionalidad e incluso
provocar una falla por deformación plástica o fractura, por lo cual se tomó la decisión de
rediseñar la idea inicial.

30
Ilustración 20. Prototipo de baja resolución: fenómeno de pandeo presente en sistema de plegado.
Con base a las observaciones anteriormente realizadas, se decidió modificar el sistema de
plegado con el fin de evitar fallas por deformación asociada a pandeo y facilitar la
maniobrabilidad para el usuario, en el nuevo diseño se remplazó el accionador del seguro por
un pasador separado de la estructura principal para reducir la fuerza que debe ejercer el
usuario al momento de accionar el sistema. Además, al prescindir de la necesidad de levantar
el brazo exterior para plegar el equipo, fue posible eliminar la remoción de material en el
extremo inferior, donde el esfuerzo generado a partir del momento flector es máximo, y así
solo contar con un canal en el medio del sistema por donde pasará los brazos internos, junto
con la condición de contar con la estructura interna que funciona como eje de manera
permanente.
Ilustración 21. Sistema de plegado: rediseño.

31
Por otro lado, el sistema de soporte-agarre del bebé se encuentra sujeto a la posibilidad de
implementar las uniones por costura, cumpliendo el requerimiento de fácil limpieza y según
lo conversado con la costurera contactada para realizar esta parte del proyecto, fue necesario
incluir un mecanismo de forro desmontable que permitiera remover la base rígida y así dar
mayor comodidad para lavar el arnés que sostiene al bebé. Adicionalmente, la geometría de
la base fue reducida en la zona inferior con el fin de dar mayor comodidad al niño y cumplir
una doble funcionalidad como aductor para evitar que niño junte las piernas.
Para identificar el orden y tipo de costuras a utilizar en la manufactura del arnés se construyó
un prototipo de media resolución con un tamaño inicial guiado por las medidas
antropométricas obtenidas del trabajo realizado por Moreno [37] para este mismo equipo, en
el cual se rediseñó el sistema de sujeción inferior al unificarlo con el forro de la base,
simplificando así los puntos de conexión con el sistema, además de implementar una nueva
configuración para graduar su largo recogiendo el material en exceso con un plegado que se
ajustará con una hebilla corrediza. También se puede evidenciar la ubicación de las hebillas
terminales de la base que permitirán el acople con el sistema de sustentación y el uso de
correas cruzadas para la sujeción superior.
Ilustración 22. Prototipo de media resolución: Sistema de soporte-agarre del bebé.
Ilustración 23. Prototipo de media resolución: Sistema de soporte-agarre del bebé (configuración de sujeción inferior).
Luego de realizar pruebas de funcionalidad y medidas en un niño con edad cronológica de 2
años que cuenta con un normal desarrollo psicomotor y cuyas medidas antropométricas

32
coinciden con los datos de niños de aproximadamente 3 años con retraso en su desarrollo, se
pudo tener un primer acercamiento a las medidas máximas necesarias del arnés diseñado. En
base a esa prueba, se encontró que el dispositivo era difícil de colocar y acomodar en el
usuario debido al peso que induce el soporte abdominal, por lo que era necesario de más de
una persona para lograr sujetarlo completamente.
Además, las medidas tomadas en cuenta eran inferiores a las necesarias, ya que no
consideraban que el tamaño del niño aumenta con pañales y demás accesorios; debido a la
situación de confinamiento y restricciones por la pandemia de COVID-19, se utilizaron
patrones de modistería para ropa de bebé como referencia para las nuevas medidas.
Finalmente, se evidencia que es necesario agregar secciones de tela que reemplacen los
soportes laterales ya que la reata utilizada no se encuentra suficiente para garantizar
protección; y reducir el ancho de tela en la entrepierna ya que excede las medidas del niño y
no le brindan la comodidad esperada.
Diseño de detalle
A partir de las oportunidades de mejora identificadas en el diseño preliminar, se modificó la
geometría del asiento acolchado con el fin de dar mayor comodidad al usuario, realizando
adaptaciones orientadas a la antropometría de estos. Se cambió la geometría del acolchado
en la zona pélvica de tal forma que no se interfiera con el movimiento de las extremidades
inferiores y se definieron las dimensiones basadas en las medidas reportadas en el Anexo A
y obtenidas del trabajo previamente realizado por Moreno [37].
Ilustración 24. Diseño de detalle: base acolchada para sistema de soporte.
En la Ilustración 24, se evidencia el diseño modificado del soporte acolchado, donde la
geometría izquierda representa la pieza a manufacturar en material acolchado para garantizar
la comodidad, y la geometría derecha la base rígida que promoverá la corrección de la postura
del niño, además de servir como elemento de acople para las correas de sustentación que se
encontrarán en la cara inferior del sistema.
Junto a la modificación de la base acolchada, se construyó un tercer prototipo para el diseño
del arnés de seguridad, en esta ocasión de alta resolución, donde se integraron los soportes
laterales que reemplazaran las estructuras fijas acopladas en la base en el primer prototipo,
esto con el fin de dar un mayor rango de ajuste a las medidas. Adicionalmente, se cambió el
mecanismo de sujeción de las correas para el torso superior e inferior, con el fin de colocarlo

33
con mayor facilidad al niño, para esto se ideó un sistema tipo chaleco en donde al apoyar las
correas superiores en los hombros del bebé se tenga el soporte necesario para ajustar la
configuración del arnés, lo cual incluye el abrochado de la hebilla horizontal ubicada en el
torso, y las mismas para el sistema de soporte inferior que pasa por en medio de las piernas
del bebé.
Ilustración 25. Prototipo de alta resolución: Arnés de seguridad.
De este diseño se encontró la necesidad de agregar un retenedor de correas de hombros para
el sistema de sujeción superior, ya que estas podrían descolgarse con ciertos movimientos
del tren superior del niño, lo cual es indeseado.
A partir del diseño conceptual inicial se consideraron 3 configuraciones del sistema de
plegado del equipo, teniendo en cuenta la viabilidad de ensamblar, disponibilidad de
materiales (diámetros y espesores de tuberías) en el mercado y espacio para realizar las
uniones de soldaduras requeridas, sin afectar la funcionalidad y seguridad del sistema. Los
diseños previos se presentan en el Anexo B.
Ilustración 26. Diseño de detalle: Sistema de plegado.

34
En la Ilustración 26 se presenta a detalle la geometría 3D interna y externa del sistema de
plegado, donde las placas curvas resaltadas en color rojo, ubicadas como continuidad del
cilindro exterior amarillo, se ubicarán como sellado de la estructura una vez ensamblada, ya
que el canal removido inicialmente será el medio por el cual se podrá ensamblar ambos
brazos que contarán con rotación concéntrica entre ellos, delimitada por los canales laterales.
Las estructuras independientes de los brazos (exterior en amarillo e interior en azul) se
evidencian en la Ilustración 27.
Ilustración 27. Brazos interior y exterior (respectivamente) del sistema estructural del equipo.
Ilustración 28. Sistema estructural y plegado completo y ensamblado.

35
Cálculos del diseño
A continuación, se presentan las pruebas de resistencia realizadas a la estructura y el sistema
de apoyo del bebé. Para lo anterior, se utilizó el software Autodesk Inventor, el análisis a
detalle se presenta a continuación.
Este análisis se realizó considerando el escenario más exigente posible al cual puede estar
expuesto el equipo durante su uso (incluyendo factor de seguridad), el cual corresponde a un
usuario de 22 kg (48.5 lbm) [37] suspendido en su totalidad en el arnés, sin ningún tipo de
apoyo de sus extremidades en el suelo.
Simulaciones
El escenario previamente expuesto como condición de operación genera un esfuerzo
distribuido sobre el asiento con reacciones ubicadas sobre el área de anclaje de las correas
que se encuentra en la cara inferior de la pieza.
Para el asiento, alineado a la disponibilidad de materiales brindada por el proveedor, se
simuló una base con 18 mm de espesor en madera y acolchado en poliuretano, adicional al
factor se seguridad, el cual se esperaba que fuera mayor a 3 considerando las condiciones de
operación del equipo, su entorno y usuarios; también se tomó como parámetro por verificar
la deflexión de la pieza a partir del reporte de elongación proporcionado por el análisis
estático, deseando que este fuera inferior a 0,05mm. Los resultados de ambos parámetros se
evidencian en las Ilustraciones a continuación, los cuales satisfacen los requerimientos
trazados anteriormente.
Ilustración 29. Simulación: Factor de seguridad de base acolchada.

36
Ilustración 30. Simulación: Elongación vertical total de base acolchada.
Para la simulación del sistema estructural, se construyó el diagrama de cuerpo libre a partir
de las reacciones de los 4 puntos de apoyo en la base acolchada y que someten a las correas
de sustentación a un estado de tensión. Simplificando la fuerza distribuida en una fuerza
puntual en el centroide del asiento, el cual es simétrico en el plano vertical. Las componentes
verticales de cada una de las fuerzas corresponden a 53.96N, como lo calculó Moreno [37]
en su trabajo previo.
Considerando la intención de orientación diagonal expuesta en el diseño conceptual, se
analizó la incidencia del ángulo en la fuerza resultante, donde se encontró que a medida que
el ángulo se inclinada más hacia el eje horizontal, la fuerza resultante de las componentes
verticales y horizontales aumenta, como se evidencia en la Tabla 5.
Ilustración 31. Diagrama de cuerpo libre: reacciones sobre base acolchada en 2D.
∑𝑀𝐵 = 0 = 𝐿𝐴𝑦 −𝐿𝐹
2→ 𝑨𝒚 =
𝐹
2= 𝑩𝒚
𝑨𝒙 = 𝑩𝒙 =𝐹
2𝑐𝑜𝑡(𝛼)
Tabla 5. Componentes de fuerza en función de ángulo de inclinación de las correas.
Ángulo α (°) Ax=Bx (N) Ay=By (N) Ftot (N)
90 0 53,96 53,96
75 14,46 53,96 55,86
60 31,15 53,96 62,30
45 53,96 53,96 76,30
30 93,45 53,96 107,91

36
Tomando como límite posible, un ángulo de 30° con respecto a la horizontal, en base a las
dimensiones de la estructura y la elevación máxima posible de la base acolchada a partir de
las medidas antropométricas de las extremidades del bebé. Las fuerzas fueron ubicadas en la
estructura para evaluar su factor de seguridad y deflexión en los tres ejes principales a través
de análisis estático. En cuanto a la deflexión, el marco de referencia para garantizar que este
parámetro no afecte el funcionamiento o integridad del dispositivo se presenta en la tabla a
continuación:
Tabla 6. Límites de deflexión por longitud de viga recomendados [38].
Pieza general de máquina 0.0005 - 0.003 mm/mm
Precisión moderada 0.00001 - 0.0005 mm/mm
Alta precisión 0.0000001 - 0.00001 mm/mm
En los resultados del análisis estático presentados en las Ilustraciones 32 a 35 se evidencia
que se cumple con los requisitos de factor de seguridad y deflexión anteriormente definidos.
El resumen del análisis de deflexión que se comparó con la referencia seleccionada se
encuentra en la Tabla 7, en ella se presenta la deflexión por longitud sobre cada uno de los
ejes cartesianos principales con respecto a la longitud de viga más crítica y afectada por la
dirección de la deflexión, donde la longitud de la viga en dirección Z y Y es aproximadamente
358 y 619 mm, respectivamente.
Ilustración 32. Simulación: Factor del sistema estructural.

37
Ilustración 33. Simulación: Elongación en eje X del sistema estructural.
Ilustración 34. Simulación: Elongación en eje Y del sistema estructural.

38
Ilustración 35. Simulación: Elongación en eje Z del sistema estructural.
Tabla 7. Simulación: Resultados de deflexión máxima por longitud de viga.
Deflexión
Eje Desplazamiento máx (mm/mm) Deflexión máx (mm/mm)
X 0,001209 4,9614×10-5
Y 0,001349 9,5714×10-5
Z 0,001159 4,7562×10-5
Sistema de plegado: Resorte
Para accionar el sistema de plegado diseñado, se requiere el uso de un resorte que garantice
el retorno seguro del pasador al punto inferior, posición que restringe el giro indeseado de la
estructura durante su uso. Por lo anterior, se realizaron los cálculos pertinentes para definir
los parámetros geométricos de este componente.
En primer lugar, fue necesario determinar la fuerza de operación del resorte, es decir la fuerza
que la persona que controla el dispositivo debe realizar para levantar el pasador y poder
plegar el dispositivo, esta fuerza también debe garantizar que el resorte conserve su
elongación de reposo (cuando no se acciona el pasador) ante las posibles perturbaciones que
puede sufrir el equipo en uso, por ejemplo, por movimientos involuntarios y agitados del
usuario. La magnitud de la fuerza seleccionada para el diseño se basó en lo indicado por la
norma UNE-EN 1005-3: Límites de fuerza recomendados para la utilización de máquinas
[39], de esta se tomó como grupo de referencia aquel que se refiere al trabajo con el brazo en

39
posición sentada y de este la fuerza de accionamiento hacia arriba, así la fuerza isométrica
recomendada en un ámbito doméstico corresponde a 31N (7 lbf).
Posteriormente, se realizaron los cálculos necesarios para definir el diseño del resorte, donde
se escogió alambre de piano de 1,2mm como el material de manufactura y se determinó un
resorte con extremos escuadrados y planos. Las ecuaciones y valores recomendados para los
parámetros necesarios en esta primera estimación del diseño fueron tomados de la novena
edición del libro Shigley’s Mechanical Engineering Design [40], el detalle de los cálculos
detrás de los resultados presentados en la tabla a continuación es mostrado en el Anexo C.
Tabla 8. Cálculos de diseño para resorte de sistema de plegado.
d [in] 0,05
D [in] 0,62
A [kpsi pulgm] 201
m 0,15
E [Mpsi] 29
G [Mpsi] 11,85
Sut [psi] 312907,28
Ssy [psi] 175228,08
Fsy [lbf] 10,60
K[lbf/in] 7,39
Y [in] 1
C 13,17
Kb 1,10
Ts [psi] 140554,53
ns 1,25
DE [in] 0,67
DI [in] 0,58
Na 4,14
Nt 6,14
Ls [in] 0,29
Lo [in] 1,29
Finalmente, los anteriores cálculos fueron verificados y probados directamente sobre el
modelo 3D realizado en Autodesk Inventor a través de la herramienta de diseño automático
de la misma herramienta. El diseño resultante fue llevado a plano y manufacturado, este se
puede evidenciar a detalle en el Anexo D.
Ilustración 36. Resorte del sistema de plegado: Simulación y pieza manufacturada.

40
MANUFACTURA
Procesos de manufactura
A continuación, se presentan los resultados al manufacturar las piezas del dispositivo con
base a las observaciones y cambios de los prototipos concebidos anteriormente.
Arnés y correas
En primer lugar, con el cumplimiento de requisitos de deflexión y factor de seguridad de la
base acolchada, este fue elaborado con los materiales especificados en la simulación y
cubierto por tela tipo cuerina, con el fin de garantizar el fácil aseo y desinfección de la
superficie y proteger el relleno acolchado.
Ilustración 37. Base acolchada
Para al arnés, que recubre la base acolchada, se seleccionó una tela acolchada antialérgica
para bebés para brindarle comodidad al usuario durante su uso, y a partir del diseño obtenido
en el prototipo de alta resolución se replicó el patrón de costura.
Ilustración 38. Tela acolchada seleccionada para arnés de bebé.

41
Adicionalmente, se adquirieron los accesorios para ubicar y ajustar la reata que permite
graduar las medidas del arnés, además de los puentes que encarrilan aquellas que conectan
con las correas de sustentación en la base acolchada.
Ilustración 39. Accesorios para la sujeción del arnés.
El arnés finalmente construido se presenta en las ilustraciones a continuación:
Ilustración 40. Arnés de seguridad para el equipo acoplado con la base acolchada.

42
Ilustración 41. Sistema de desacople del arnés y la base acolchada.
Ilustración 42. sistema de sujeción del arnés.
Finalmente, se completó el diseño con el sistema de graduación de la longitud a la altura de
los aductores, como se evidencia en las ilustraciones a continuación.

43
Ilustración 43. Sistema de graduación en ajuste inferior.
Para las correas, se seleccionó una hebilla tipo solapa que permitiera una fácil graduación del
largo de la misma y a la vez garantizara su posición al no estar accionado.
Ilustración 44. Hebilla tipo solapa para el sistema de sustentación.
Para su manufactura y garantizar la seguridad de la unión, se realizó una costura tipo cruz a
doble hilo para sellar la mitad de la hebilla tipo broche que se unirá con la base acolchada.
Ilustración 45. Correas de sustentación.

44
Estructura
Para la manufactura de la estructura se inició por el doblado de los 4 brazos elaborados en
tubos de acero inoxidable de 1” calibre 16, en la ilustración a continuación se presenta la
verificación de dimensiones de radios y geometría con base a los planos del diseño en escala
1:1. Posteriormente, fueron cortados para obtener las medidas longitudinales finales y
soldados al centro de cilindros concéntricos que conforman el sistema de plegado.
Ilustración 46. Tubo doblado según las especificaciones de diseño.
Para la manufactura de las piezas cilíndricas concéntricas exterior e interior mencionadas
anteriormente, se seleccionaron tubos de 4” y 3½” respectivamente, debido a la
disponibilidad de referencias en el mercado. En ellas se realizaron los agujeros que
permitirían el acople y correcta ubicación de los brazos. Adicionalmente, en el cilindro
exterior se realizaron los cortes de los canales que permitirán la rotación de los brazos al
accionar el sistema de plegado y aquellos necesarios para el ensamble de los dos conjuntos
cuando cuenten con los brazos soldados. Estos cortes fueron realizados por maquinado CNC.
Para garantizar una medida de holgura adecuada que permitiera un plegado suave y a la vez
evitara un descuadre en la ubicación de los agujeros que aseguran las posiciones de plegado
y desplegado, fue necesario añadir un anillo en la zona inferior del ensamble de cilindros,
este fue manufacturado por impresión 3D en el material polimérico PLA.
Por otro lado, utilizando corte en plasma sobre una lámina del mismo material con 1,5 mm
de espesor, se elaboraron las piezas de sellado que se ubicarían en la cara inferior del cilindro

45
externo y la cara superior de cilindro interno. También fue cortada la placa circular ubicada
en la cara superior del cilindro exterior que sellaría todo el equipo una vez ensamblado.
Ilustración 47. cilindros concéntricos exterior e interior del sistema de plegado.
Ilustración 48. Soldadura y ensamble de brazos y placas de sellado a los cilindros concéntricos.
Ilustración 49. Diseño de anillo para reajuste de holgura.
Ilustración 50. Placa de sellado del sistema de plegado.
Para la unión de las ruedas se manufacturaron terminaciones para cada brazo en barra sólida
de acero inoxidable de 1” con la rosca correspondiente a la de las ruedas adquiridas.

40
Ilustración 51. Terminaciones roscadas para la unión de rodachines.
Ilustración 52. Vista completa del ensamble de brazos soldados.
Con respecto a la manufactura del sistema de plegado, se maquinó el pasador con la
geometría de diseño, se utilizó un tramo de la misma referencia de tubo de los brazos para
elaborar el canal donde la anterior pieza estará contenida, se cortarón las placas de sellado
para sus extremos y se compró un pomo comercial que ser roscaría al pasador y permitirá al
usuario accionar el sistema de manera ergonómica.

41
Ilustración 53. Configuración de seguro-pasador del sistema de plegado.
Finalmente, el equipo fue sellado por medio de soldadura tanto con la placa superior como
con las piezas laterales elaboradas en la misma referencia de tubería del cilindro concéntrico
exterior para reemplazar las partes removidas de esta pieza que permitieron el ensamble de
los brazos, como último paso, se brilló y pintó el equipo con pintura electrostática.
Ilustración 54. sistema estructural brillado y pintado.
La referencia de ruedas seleccionadas para el equipo fueron ruedas giratorias con freno, ya
que era necesario garantizar la estabilidad del equipo cuando no esté en uso o se requiera
restringir el movimiento del usuario, por ejemplo, cuando se vaya a subir o bajar del
dispositivo. La carga soportada por la referencia escogida es de 40 kg cada una, la
información técnica de estas puede consultarse en el Anexo E.
Además, se adquirieron tazas plegables de silicona para cumplir la función de protectores de
las ruedas, con el fin de evitar posibles maltratos en las extremidades del usuario durante el
uso, y a su vez facilidad para activar y desactivar el freno de las ruedas al permitir recogerse.

42
La referencia Clic&Go de la marca Faber-Castell fue la alternativa comercial escogida para
esta pieza, ya que cumplió con los requerimientos dimensionales que evitarían restringir el
libre movimiento y giro de las ruedas.
Ilustración 55. Rodachina y protector de rodachina.
El producto final, posterior al proceso de manufactura se presenta en la ilustración a
continuación, para inhibir el deslizamiento de las correas sobre la estructura, se elaboraron
canales en material polimérico que no estorbaran en la función corrediza que da paso a la
graduación de la longitud de las mismas. Estas piezas fueron remachadas a la estructura para
garantizar la unión segura y permanente.
Ilustración 56. Dispositivo de gateo y pieza antideslizamiento de correas.

43
Las dimensiones finales del dispositivo de gateo se evidencian en la Tabla 9.
Tabla 9. dimensiones finales del dispositivo de gateo.
Dimensión Magnitud
Peso total [kg] 5
Ancho total en disposición de uso [cm] 60
Profundidad total en disposición de uso [cm] 60
Altura total [cm] 85
Ancho total en disposición de desuso [cm] 85
Profundidad total en disposición de desuso [cm] 25
Pruebas
Correas de sustentación: Ensayo de tensión
Debido a que no se conocía información de la resistencia de las hebillas tipo solapa que se
utilizaron para construir las correas de sustentación, ni de las hebillas tipo broche ubicadas
en los puntos de acople con el asiento y ajustes del arnés, fue necesario someterlas a un
ensayo de tensión, a partir del cual se obtuvo un promedio estimado del factor de seguridad
basado en dos muestras por cada tipo de probeta construida. Esta prueba siguió los
lineamientos y recomendaciones indicados por la norma NTC 6203-2:2016, la cual se refiere
a las cintas de amarre fabricadas a partir de fibras artificiales para vehículos de carga [41], y
proporciona los métodos de ensayo para las cintas de amarre para la seguridad de la carga.
Con base en lo anterior, se construyeron 3 configuraciones de probeta para evaluar la
resistencia de ambas hebillas mencionadas anteriormente de manera individual y la
configuración completa de la correa de sustentación diseñada y manufacturada, es decir, el
conjunto de ambas hebillas dispuestas de la misma forma que en el equipo de gateo. De cada
configuración se contaba con dos muestras como se evidencia en la Ilustración 57.
Ilustración 57. Probetas para ensayo de tensión del sistema de sustentación.
De izquierda a derecha se encuentra:
Probeta de hebilla broche 1 y 2
Probeta completa 1 y 2
Probeta de hebilla solapa 1 y 2

44
Para el ensayo, se someteron cada una de la probetas a 3 condiciones de tensión. En primer
lugar, con la probeta ya ubicada en la maquina de ensayos (INSTOM 5586), se tensó la misma
a 0,05 LC (donde LC se refiere a la capacidad de carga para la cual fue diseñada, 53,96 N en
este caso) aumentando la carga hasta el equivalente de 1,25 LC manteniendo la tensión por
1 minuto y al final inspeccionando el estado de la correa, la cual no debia presentar
defomación permanente. Porteriormente, se volvia a carga la correa en esta ocasión a 2LC,
donde igualmente la correa no debía presentar indicios de falla. Finalmente, se determinó la
carga de rotura o falla de la probeta. El montaje y acoples empleados para cada una de las
configuraciones se presentan en la Ilustración 57.
Debido a la longitud de la probeta completa, las terminaciones empleadas para las dos
configuraciones anteriores no permitian generar la tensión a la cual se debía llevar las
probetas, por lo anterior, la terminación inferior en este caso fue reemplazada por una con un
diametro mayor, que a su vez exagera la condición de apoyo real en el dispositivo, el cual es
un diámetro de 1 pulgada, en este caso el diámetro superior de la terminación afecta
principalemnte la apertura de la hebilla de solapa, condición que se previó reduciría la carga
que soportaría la probeta antes de fallar por deslizamiento de cedendia en la hebilla, sin
embargo se realizó la prueba para corroborar los resultados.
Ilustración 58. Montaje de probetas para ensayo a tensión (Hebilla solapa, Hebilla broche y completa).
Como resultado, todas las configuraciones soportaron las dos etapas previas al ensayo con
carga de falla, por lo cual se garantiza un factor de seguridad mínimo de 2, y que los
elementos seleccionados para manufacturar las correas cumplen con los requerimientos de
resistencia y seguridad necesarios para usarse en el dispositivo. Los modos de falla que se
obtuvieron fueron la fractura de la hebilla tipo broche y la cedencia de la hebilla de solapa
que alargaba la longitud de la correa, condición indeseada para su funcionalidad.

45
En la Tabla 10, se presenta la carga máxima soportada y el factor de seguridad calculado para
cada una de las probetas sometidas al ensayo, obteniendo un promedio para cada
configuración probada que cumple con los requerimientos de seguridad necesarios.
Tabla 10. Factor de seguridad obtenido a partir del ensayo de tensión para correas de sustentación.
Probeta Carga máxima (N) Factor de seguridad Promedio
Hebilla solapa 1 259,859 4,816 4,27
Hebilla solapa 2 201,087 3,727
Hebilla broche 1 933,758 17,305 17,13
Hebilla broche 2 915,229 16,961
Completa 1 129,355 2,397 2,21
Completa 2 109,102 2,022
Como se indicó anteriormente, la condición de terminación para la configuración completa
redujo el factor de seguridad de la hebilla solapa (elemento que falló en esta configuración)
de un valor mayor de 4 a 2,21. Las gráficas obtenidas de los ensayos se evidencian en las
Ilustraciones 59, 60 y 61.
Ilustración 59. Gráfica de resultados a una carga de 1,25LC.
Ilustración 60. Gráfica de resultados a una carga de 2LC.

46
Ilustración 61. Gráfica de resultados a carga de falla.
Arnés: Verificación de medidas
Como prueba de la correcta selección rango de medidas del arnés se realizó la verificación
sobre niños dentro del rango de edad para el cual fue diseñada la pieza, esta verificación fue
realizada bajo la supervisión de la fisioterapeuta infantil, María Isabel Cetina, referencia
profesional del proyecto que a su vez desempeñó el papel de jurado ante el correcto
funcionamiento, seguridad y cumplimiento de otros requerimientos del equipo. La evidencia
fotográfica y datos de la población que conformó la muestra se presenta a continuación:
Tabla 11. Verificación de medidas del arnés.
Datos Evidencia fotográfica
Edad: 12 meses
Peso: 8,94 kg
Estatura: 69 cm

47
Edad: 16 meses
Peso: 10,4 kg
Estatura: 83 cm
Edad: 33 meses
Peso: 10,8 kg
Estatura: 91 cm
Edad: 36 meses
Peso: N/R
Estatura: 85 cm

48
De la tabla anterior y la retroalimentación de la fisioterapeuta se resaltan dos aspectos a
corregir sobre las dimensiones del arnés. En primer lugar, el retenedor de correas de los
hombros no cuenta con la longitud suficiente para ajustarse a niños de edades más avanzadas,
como se evidencia en la tabla, solo en la primera niña de 12 meses de edad fue posible
ajustarlo sin generar una contracción escapular indeseada. En segundo lugar, la longitud
mínima de la sujeción inferior no es suficiente para tener un adecuado ajuste en usuarios de
corta edad. Ambas dimensiones fueron corregidas para el equipo final.
Por otro lado, el arnés cumplió con las expectativas de seguridad, comodidad, corrección
postural, fácil uso, funcionalidad y estética por parte de la fisioterapeuta.
Ensamble: Prueba de resistencia y estabilidad
Para verificar aspectos importantes del diseño y funcionamiento del equipo de gateo, se
realizó una primera prueba de resistencia y estabilidad, esta consistió en la ubicación del peso
de diseño (22 kg) en la zona donde se encontraría el usuario del dispositivo para recrear las
condiciones a la cual estaría sometido el equipo durante su uso. En primer lugar, se
inspeccionó el comportamiento estático de la estructura, en particular la deflexión de los
brazos y la medición de la altura del centro como punto de referencia para la elongación en
el plano vertical.
Como resultado, no se evidenció deformación en la estructura, cedencia en las correas, ni
reducción visible en la altura del punto de referencia corroborado por la medición
nuevamente realizada y comparada con la medida inicial de referencia tomada.
Ilustración 62. Montaje de ensayo estático.
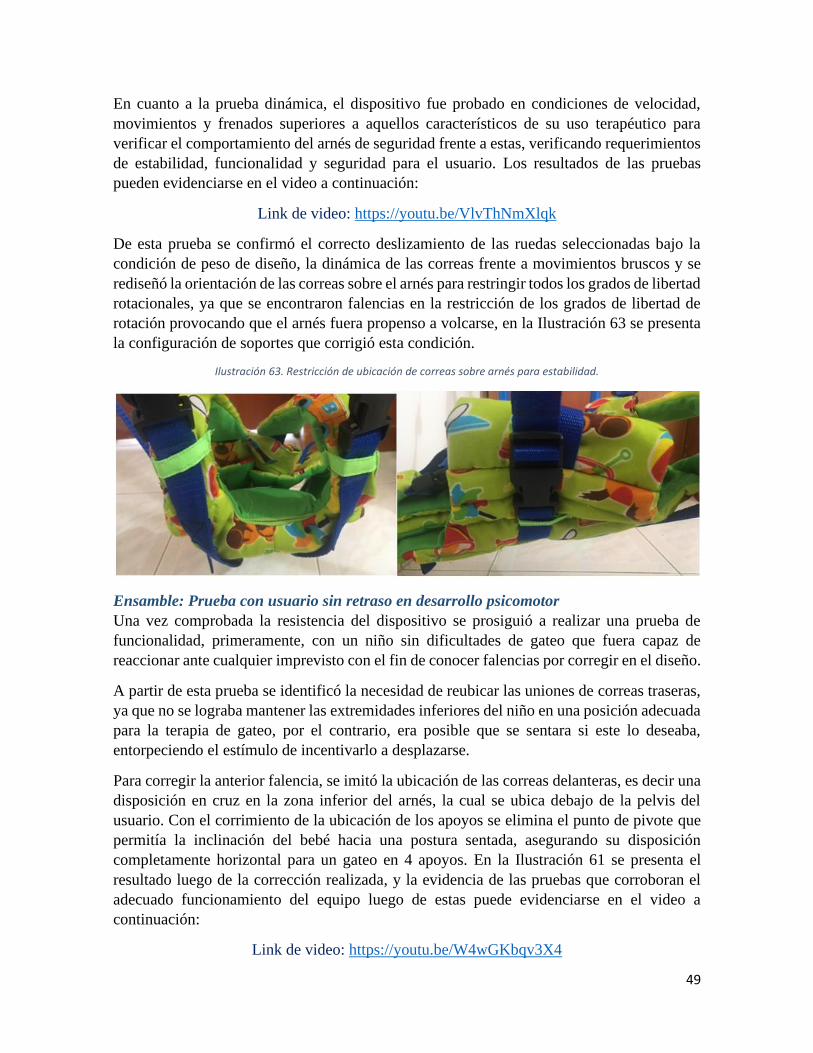
49
En cuanto a la prueba dinámica, el dispositivo fue probado en condiciones de velocidad,
movimientos y frenados superiores a aquellos característicos de su uso terapéutico para
verificar el comportamiento del arnés de seguridad frente a estas, verificando requerimientos
de estabilidad, funcionalidad y seguridad para el usuario. Los resultados de las pruebas
pueden evidenciarse en el video a continuación:
Link de video: https://youtu.be/VlvThNmXlqk
De esta prueba se confirmó el correcto deslizamiento de las ruedas seleccionadas bajo la
condición de peso de diseño, la dinámica de las correas frente a movimientos bruscos y se
rediseñó la orientación de las correas sobre el arnés para restringir todos los grados de libertad
rotacionales, ya que se encontraron falencias en la restricción de los grados de libertad de
rotación provocando que el arnés fuera propenso a volcarse, en la Ilustración 63 se presenta
la configuración de soportes que corrigió esta condición.
Ilustración 63. Restricción de ubicación de correas sobre arnés para estabilidad.
Ensamble: Prueba con usuario sin retraso en desarrollo psicomotor
Una vez comprobada la resistencia del dispositivo se prosiguió a realizar una prueba de
funcionalidad, primeramente, con un niño sin dificultades de gateo que fuera capaz de
reaccionar ante cualquier imprevisto con el fin de conocer falencias por corregir en el diseño.
A partir de esta prueba se identificó la necesidad de reubicar las uniones de correas traseras,
ya que no se lograba mantener las extremidades inferiores del niño en una posición adecuada
para la terapia de gateo, por el contrario, era posible que se sentara si este lo deseaba,
entorpeciendo el estímulo de incentivarlo a desplazarse.
Para corregir la anterior falencia, se imitó la ubicación de las correas delanteras, es decir una
disposición en cruz en la zona inferior del arnés, la cual se ubica debajo de la pelvis del
usuario. Con el corrimiento de la ubicación de los apoyos se elimina el punto de pivote que
permitía la inclinación del bebé hacia una postura sentada, asegurando su disposición
completamente horizontal para un gateo en 4 apoyos. En la Ilustración 61 se presenta el
resultado luego de la corrección realizada, y la evidencia de las pruebas que corroboran el
adecuado funcionamiento del equipo luego de estas puede evidenciarse en el video a
continuación:
Link de video: https://youtu.be/W4wGKbqv3X4

50
Ilustración 64. Prueba de usuario sin retraso en desarrollo psicomotor.
Como resultado, se encuentra que el dispositivo permite que el niño se desplace con completa
autonomía en una posición adecuada y asistido por un correcto funcionamiento de las llantas.
Por otro lado, ante movimientos bruscos no asociados a la actividad de gateo, el asiento
permanece estable para garantizar la seguridad del niño, además de obtener una adecuada
respuesta de resistencia por parte de las correas que soportan al usuario en suspensión parcial
(solo apoyo de manos) y completa, el niño que colaboró en esta prueba tiene 3 años y pesa
15kg.
Adicionalmente, se destaca que el usuario comunicó que el dispositivo es cómodo, llamativo
e invita a subirse en él por tener la apariencia de juguete, esto favoreció su experiencia, la
cual encontró divertida. Por su parte, a la madre le transmitió seguridad.
Ilustración 65. Prueba de usuario en suspensión parcial y total.
Ensamble: Prueba con usuario objetivo
Finalmente, el equipo fue probado por una niña usuaria de la fundación Aconiño bajo la
supervisión de la encargada de su terapia. Donde se destaca que fue fácil, rápido e intuitivo
colocar el arnés sobre la niña, que a su vez se encontró cómoda al utilizar el dispositivo, los

51
movimientos de gateo no se vieron entorpecidos y por el contrario se impulsaba a que los
realizara para desplazarse, estimulando su terapia adecuadamente.
No se presentaron signos de falla visibles durante el uso del dispositivo como deformación
de la estructura o desajuste de las correas. Por el contrario, ante movimientos no asociados
al gateo como deseo de volcarse, el conjunto arnés-correas inhibió que se presentara esta
rotación indeseada que hubiera afectado negativamente la seguridad del usuario.
El dispositivo también permitió completa autonomía del usuario durante su uso en esta
prueba, donde la niña se desplazó según su deseo sin asistencia, mientras que la profesional
a cargo podía supervisar la práctica, estimular la dirección de su gateo con llamados e
indicaciones o intervenir si esto era necesario. la niña que colaboró en esta prueba tiene 33
meses y pesa 9 kg, aproximadamente.
Ilustración 66. Ilustración 61. Prueba con usuario de la fundación.
Finalmente, la evidencia de las pruebas que corroboran el adecuado funcionamiento del
equipo puede evidenciarse en el video a continuación:
Link de video: https://youtu.be/OPiVZyl7wJQ
No fue posible realizar más ensayos con niños de otras edades debido a las restricciones de
asistencia a la fundación que tuvieron lugar durante más de 2 semanas.
Costos
A continuación, se presentan las tablas de costos de materiales y manufactura del equipo
desarrollado para el presente proyecto:
Tabla 12. Costo de materiales.
Ítem Descripción Cantidad Costo
unitario
Costo
total
Protectores de
ruedas
Vasos plegables Clic&Go marca
Faber-Castell. 4 $9.500 $38.000
Tela acolchada
del arnés
Colcha de bebé antialérgica con
estampado.
1 $38.600 $38.600

52
Rodachinas
con freno
Rodachina fabricada en Nylon
100%, con doble rueda y banda
blanda para protección de pisos y
adaptador roscado. Capacidad de
40 kg.
4 $2.100 $8.400
Base
acolchada
Mini cojín fabricado según
medidas.
1 $60.000 $60.000
Reata Cinta de amarra sintética de 1”. 16 m $300 $4.800
Chapa
ClicClac
plástica
Hebilla tipo broche en Nylon
negro.
6 $720 $4.320
Herraje de
acero
Hebilla tipo solapa. 4 $6.500 $26.000
Velcro Velcro de 1” de ancho color
negro.
1 m $800 $800
Trabilla
plástica
Hebilla corrediza para ajustar
largo de reata.
2 $55 $110
Tubo 1” Tubo de acero inoxidable 304 de
1” calibre 16 x 5m.
1 $100.000 $100.000
Tramo tubo 4” Tubo de acero inoxidable 304 de
4” x 90mm.
1 $13.000 $13.000
Tramo tubo
3½”
Tubo de acero inoxidable 304 de
3½” x 70mm.
1 $13.000 $13.000
Placa Lámina de acero inoxidable de
espesor 1,5mm x 500 x 500 mm.
1 $60.000 $60.000
Resorte Resorte en alambre de piano de
1.2mm fabricado según medida.
1 $5000 $5000
Barra Barra sólida de acero inoxidable
304 de ¾” x 140mm.
1 $10.000 $10.000
Pomo Perilla plástica de bola, rosca
M10 hembra color negro.
1 $18.596 $18.596
Remaches Remaches de 5 x 20mm. 8 $200 $1.600
TOTAL $402.226
Tabla 13. Costo de procesos de manufactura.
Proceso Tiempo [hrs] Costo por hora Costo total
Doblado de tubos 4 $9500 $38.000
Corte plasma 2 $32.000 $64.000
Torno 8 $26.500 $212.000
CNC 2,5 $51.000 $127.500
Impresión 3D 2,5 $13.400 $33.500
Soldadura 4 $22.500 $90.000
Pintura electrostática - - $30.000
TOTAL $594.500

53
El costo total de fabricación del dispositivo fue de $996.726. Este puede ser inferior en la
replicación del equipo ya que se contó con sobrante de materiales como la placa de acero
inoxidable, reata, tela, entre otros.
RETROALIMENTACIÓN
Para la retroalimentación desde la perspectiva de la profesional consultada se utilizó la
siguiente matriz de calificación que contiene los requerimientos de diseño identificados
desde la casa de la calidad al inicio del proyecto. Para su calificación, se definió un criterio
de evaluación cuantitativo compuesto por un rango de 1 a 5, donde 5 hace referencia a que
se cumplió completamente con el requerimiento y 1 a que se incumplió completamente con
el mismo. Los resultados de la evaluación realizada por la fisioterapeuta se presentan en la
tabla a continuación:
Tabla 14. Retroalimentación en el cumplimiento de requerimientos del cliente.
Requerimiento del cliente Calificación
Apto para niños entre los 6 medes y los 3 años 5
Adaptabilidad para varias tallas y pesos 5
Estabilidad y sensibilidad en el área abdominal 4
Peso del equipo (Menor a 5 kg) 5
Facilidad de uso 5
Espacio ocupado en desuso 5
Seguridad (resistencia, ajuste y diseño) 5
Apariencia y estética 5
Costo total 3
A pesar de lograr cumplir con la mayoría de los requerimientos del cliente, se debe considerar
en futuras mejoras del proyecto, reducir en mayor medida el costo del dispositivo, ya que aún
es elevado para las familias que asisten a la fundación Aconiño.
CONCLUSIONES Como conclusión, se destaca la mejora en los aspectos identificados como críticos frente al
primer prototipo realizado del equipo; entre ellos el diseño del arnés orientado en brindar
mayor seguridad y comodidad para el usuario, ser funcional para la fisioterapeuta o
profesional a cargo de la terapia. Así mismo, la simplificación del diseño del sistema de
plegado sin perder funcionalidad, evitando el desacople de sus partes al unificar el sistema
con la estructura base del dispositivo.
Se logró una reducción de costos de fabricación cercana al 20% sin sacrificar funcionalidad,
estética ni seguridad en el equipo frente al primer prototipo construido. A su vez, se
redireccionaron gastos del presupuesto en mejoras de selección de materiales y se redujeron
en la optimización de los requerimientos en partes como rodachines, sus protectores y correas
de sustentación.

54
Finalmente, se llegó a un producto que satisface las necesidades del usuario y expectativas
del operario, con las pruebas necesarias para garantizar los requerimientos obteniendo
factores de seguridad satisfactorios para cada una de sus partes, brindando seguridad y
confiabilidad.
RECOMENDACIONES
Para futuros trabajo sobre el dispositivo se recomienda rediseñar el ensamble de las piezas
orientado al mantenimiento, reemplazando uniones permanentes, como algunas soldaduras,
por ajustes roscados que permitan reemplazar piezas desgastadas con el tiempo, como el
resorte del sistema de plegado o el anillo de corrección de holgura. También se podría pensar
para los remaches realizados ya que si es necesario reemplazar las correas se tendría que
destruir y rehacer los mismos.
Por otro lado, también es posible redimensionar los cilindros concéntricos que guían el
sistema de plegado para mejorar la holgura y suavidad de su giro, explorando otras
referencias en el mercado.
Como ultima recomendación, sería adecuado que las correas de sustentación se restringieran
en mayor grado con alguna configuración de anclajes en la zona superior o media del
dispositivo, con el fin de eliminar el reducido balanceo que se evidencia ante movimientos
bruscos. Además, que estas fueran cubiertas con algún forro o protección para evitar posibles
incomodidades en el usuario debido a la dureza de las hebillas o fricción con la misma correa
al ser un material no tan suave. También es recomendable evaluar alternativas de hebillas
para someterse a pruebas de resistencia obteniendo un mejor criterio de selección de la
misma, ya que en este proyecto solo se consideró una referencia dejando a un lado la
posibilidad de comparar y obtener mejores características de este elemento.

55
BIBLIOGRAFÍA
[1] F. R. Tamayo, «Neurodesarrollo,» 2009. [En línea]. Available: Una adecuada intervención a
temprana edad, junto con factores afectivos, del entorno, culturales y socioeconómicos
pueden favorecer (o dificultar) el desarrollo óptimo de cualquier ser humano, por lo cual la
terapía de neurodesarrollo juega un papel impor.
[2] COOPERACIÓN BELGA PARA EL DESARROLLO, «Manual fisioterapia,» 2009-2010.
[En línea]. Available: http://ciapat.org/biblioteca/pdf/664-
Manual_de_Fisioterapia_como_acompanar_y_estimular_un_nino_nina_con_discapacidad.p
df.
[3] B. Correa, «Diseño de dispositivo auxiliar para la estimulación motríz y sensorial en niños
con discapacidad,» Junio 2013. [En línea]. Available:
http://repositoriocdpd.net:8080/bitstream/handle/123456789/777/Tes_CorreaGonzalezBA_D
isenoDispositivoAuxiliar_2013.pdf?sequence=1.
[4] KitSmile, «Yo cambio vidas,» [En línea]. Available:
https://www.kitsmile.com/yocambiovidas.
[5] T. Kolobe, «Un robot para aprender a gatear,» Scientific American, 2016.
[6] Asociación Aconiño, «Asociación Aconiño,» 2021. [En línea]. Available:
https://aconino.org/quienes-somos/#nosotros.
[7] Asociación Aconiño, «ACO SOMOS,» [En línea]. Available: https://aconino.org/wp-
content/uploads/2020/07/PROGRAMA-DE-0-A-3-A%C3%91OS-1-1.pdf.
[8] M. Saeta, «El gateo: ¿imprescindible para el desarrollo del bebé?,» Criar con Sentido
Común, 29 Agosto 2019. [En línea]. Available: https://www.criarconsentidocomun.com/el-
gateo-imprescindible-para-el-desarrollo-del-
bebe/#:~:text=Clasificaci%C3%B3n%20seg%C3%BAn%20Patrick's%3A&text=Gateo%20
del%20oso%3A%20manos%20y%20pies.&text=Mezcla%20paso%20a%20paso%3A%20ut
iliza,de%20las%20piernas%20.
[9] T. Gómez Cruz, «Parámetros normales de gateo. Revisión bibliográfica,» Universitat de
Barcelona, 2018.
[10] R. Freedland y B. Bertenthal, «Developmental changes in interlimb coordination: transition
to hands-and-knees crawlink,» Psychol Sci, vol. 1, nº 5, pp. 26-32, 1994.

56
[11] S. Patrick, J. Noah y J. Yang, «Developmental constrains of quadrupedal coordination across
crawling styles in human infants,» Neurophysiol, vol. 11, nº 107, pp. 3050-3061, 2012.
[12] K. Adolf, B. Vereijken y M. Denny, «Learning to crawl,» Child Dev, vol. 5, nº 69, pp. 1299-
1312, 1998.
[13] C. Jímenez, El Gateo, México D. F: Trillas, 2010.
[14] A. Fernandez-Jaén y B. Calleja-Pérez, «La parálisis cerebral infantil desde la atención
primaria,» Med Integral, vol. 4, nº 40, pp. 148-158, 2002.
[15] J. C. Silva, F. Malmierca, J. M. Blanco, M. Rocandio, M. Merino y L. Pérez, «Diagnóstico
clínico/etiológico,» de Guía para el seguimiento de niños con parálisis cerebral en Atención
Primaria, Gerencia Regional de Salud, 2016, p. 14.
[16] S. Rodríguez y C. Rodríguez, «Atención Temprana en Parálisis Cerebral Infantil,»
Universidad de La Laguna, 2016.
[17] Consejo de Salubridad General, Detección del transtorno específico del desarrollo
psicomotor en niños de 0 a 3 años, México D. F: Centro Nacional de Excelencia
Tecnológica en Salud, 2014.
[18] J. Narbona y É. Schlumberger, «Retraso psicomotor,» de Protocolos Diagnóstico
Terapeúticos de la AEP: Neurología Pediátrica, España, Sociedad Española de Pediatría,
2008, pp. 151-157.
[19] D. Fernández-Mayoralas, A. Fernández-Jaén, F. A.L, B. Calleja-Pérez y N. Muñoz-Jareño,
«Detección y manejo del retraso psicomotor en la infancia,» Pediatría Integral, vol. 8, nº
XIX, pp. 532-539, 2015.
[20] OMS, «Manual de instrucciones,» de Clasificación Estadística Internacional de
Enfermedades y Problemas relacionados con la Saluc, Washington D. C, Organización
Panamericana de la Salud, 1995, p. 7.
57
[21] OMS, «Clasificación de los trastornos mentales y del comportamiento,» de Guía de bolsillo
de la clasificación CIE-10, España, Editorial médica panamericana, 2000, p. 195.
[22] MAYO CLINIC, «Parálisis cerebral infantil,» 14 Diciembre 2019. [En línea]. Available:
https://www.mayoclinic.org/es-es/diseases-conditions/cerebral-palsy/symptoms-causes/syc-
20353999. [Último acceso: 2020 Noviembre 10].
[23] «Rodillo rollo de estimulación bebes gateo (Juguete),» Mercadolibre, [En línea]. Available:
https://articulo.mercadolibre.com.co/MCO-450278190-rodillo-rollo-de-estimulacion-bebes-
gateo-juguetes-_JM?quantity=1. [Último acceso: 10 Noviembre 2020].
[24] «Combo pelota y cubo de estimulación,» Mercadolibre, [En línea]. Available:
https://articulo.mercadolibre.com.co/MCO-571464434-combo-pelota-y-cubo-de-
estimulacion-temprana-y-gateo-
_JM?matt_tool=16559237&matt_word&matt_source=google&matt_campaign_id=9870406
457&matt_ad_group_id=98396893177&matt_match_type&matt_network=u&matt_device.
[Último acceso: 10 Noviembre 2020].
[25] «Arnés para bebé ajustable con almohadillas de Rodillas,» Mercadolibre, [En línea].
Available: https://articulo.mercadolibre.com.co/MCO-586866934-arnes-para-bebe-
ajustable-con-almohadillas-de-rodillas-
_JM?matt_tool=16559237&matt_word&matt_source=google&matt_campaign_id=9870406
457&matt_ad_group_id=98396893177&matt_match_type&matt_network=u&matt_devi.
[Último acceso: 10 Noviembre 2020].
[26] M. P. A. PASO, Dirección, Etimulación Temprana:¿Por qué debes dejar a tu bebé gatear?.
[Película]. Youtube, 2019.
[27] India Medico Instrument, «IndiaMART,» [En línea]. Available:
https://www.indiamart.com/proddetail/imi-3026-crawler-with-height-adjustment-
12378722373.html. [Último acceso: 12 Noviembre 2020].
[28] Ortotesca, «Ortotesca-rehabilitación y fisioterapia,» [En línea]. Available:
https://www.ortotecsa-rehabilitacionyfisioterapia.com/es/comprar-tienda-
catalogo/fisioterapia-infantil/gateador-graduable-f-60-2n-2052-detail.html. [Último acceso:
12 Noviembre 2020].
[29] Meyland Discover, «Ortosoluciones,» [En línea]. Available:
https://www.ortosoluciones.com/gateador-infantil-meyland-discover. [Último acceso: 12
Noviembre 2020].

58
[30] Drive Medical, «DivineMedical,» [En línea]. Available:
https://www.devinemedical.com/Drive-Medical-567092-CrawlAbout-Crawl-Trainer-
p/567092.htm. [Último acceso: 12 Noviembre 2020].
[31] eSpecial Needs, «Skillbuilders Crawler,» [En línea]. Available:
https://www.especialneeds.com/skillbuilders-crawler.html. [Último acceso: 12 Noviembre
2020].
[32] medicaleshop, «RedBarn Creeoster Crawler,» [En línea]. Available:
https://www.medicaleshop.com/redbarn-creepster-crawler.html. [Último acceso: 12
Noviembre 2020].
[33] LiteGait, «Rehab Technology,» [En línea]. Available:
https://www.rehabtechnology.com.au/product/litegait-crawlahead-paediatric-crawler/#tab-
description. [Último acceso: 12 Noviembre 2020].
[34] A. Guerra, «MotoricosInfo,» Blogspot, 19 Febrero 2010. [En línea]. Available:
http://motoricosinfo.blogspot.com/2010/02/gateador-creado-por-la-uam.html. [Último
acceso: 12 Noviembre 2020].
[35] K. Sheikh, «Un robot para aprender a gatear,» Scientific American, 28 Octubre 2016. [En
línea]. Available: https://www.investigacionyciencia.es/revistas/investigacion-y-
ciencia/especial-40-aniversario-682/un-robot-para-aprender-a-gatear-14545. [Último acceso:
12 Noviembre 2020].
[36] Antena 3, «Desarrollan un robot que predice los movimientos para ayudar a bebés con
parálisis cerebral,» 28 Julio 2016.
[37] M. Moreno, «DISEÑO DE EQUIPO DE GATEO PARA BEBÉS CON PCI Y/O RETRASO
DE DESARROLLO PSICOMOTOR,» Universidad de los Andes, Bogotá, 2020.
[38] R. L. Mott, Resistencia de Materiales Aplicada, Tercera ed., Pearson Prentice Hall, p. 431.
[39] J. A. Diego-Mas, «Evaluación del riesgo por las fuerzas ejercidas en el puesto de trabajo o
en la utilización de máquinas mediante la norma EN 1005-3,» ergonautas, 2015. [En línea].
Available: https://www.ergonautas.upv.es/metodos/fuerzas/fuerza-maxima-ayuda.php.

59
[40] R. G. Budynass y J. K. Nisbett, Shigley's Mechanical Engineering Design, New York:
McGraw-Hill, 2011.
[41] ICONTEC, «NTC 6203-2:2016: SUJECIÓN DE LA CARGA EN VEHÍCULOS DE
CARRETERA. SEGURIDAD. PARTE 2: CINTAS DE AMARRE FABRICADAS A
PARTIR DE FIBRAS ARTIFICIALES,» 2016. [En línea]. Available: https://ecollection-
icontec-org.ezproxy.uniandes.edu.co:8443/normavw.aspx?ID=5578.
[42] RAE, «Diccionario de la lengua española,» [En línea]. Available:
https://dle.rae.es/ign%C3%ADfugo. [Último acceso: 12 Noviembre 2020].
[43] Rady Children´s Hospital-San Diego, «El embarazo y el recién nacido,» The Nemours
Foundation/KidsHealth, Julio 2014. [En línea]. Available: https://www.rchsd.org/health-
articles/qu-es-la-puntuacin-de-apgar/.

60
ANEXOS
Anexo A: Medidas antropométricas de la población objetivo.
A continuación, se presentan las dimensiones antropométricas estándar de niños colombianos
desde los 6 meses hasta 3 años con parálisis cerebral.
Ilustración 67. Esquema de referencia para dimensiones antropométricas [37].
Tabla 15. Dimensiones antropométricas [37].
Dimensiones 6 meses 12 meses 18 meses 24 meses 30 meses 36 meses
Niña Niño Niña Niño Niña Niño Niña Niño Niña Niño Niña Niño 1 Peso [kg] 6,34 6,99 8,37 9,04 9,49 10,15 10,46 11,13 11,47 12,15 12,36 12,39
2 Estatura [cm] 58,41 61,53 65,85 69,07 71,7 74,78 76,66 79,5 81,89 84,12 85,74 87,94
3 Altura hombro
[cm] 43,69 46,12 49,26 51,76 53,64 56,05 57,35 59,58 61,7 63,56 64,97 66,46
4 Altura rodilla
[cm] 14,78 15,21 16,66 17,07 18,14 18,49 19,4 19,65 21,16 21,59 22,28 22,58
5
Diámetro
bitrocantérico
[cm]
11,26 11,92 12,7 13,38 13,83 14,49 14,79 15,4 15,03 15,52 15,82 16,23
6 Alcance brazo
frontal [cm] 20,77 21,93 23,42 24,61 25,5 26,65 27,26 28,33 29,47 30,44 31,03 31,82
7 Altura hombro
sentado [cm] 19,73 21,45 22,24 24,07 24,22 26,07 25,9 27,71 26,95 28,27 28,38 29,56
8 Anchura codos
[cm] 18,43 19,73 20,78 22,15 22,62 23,98 24,19 25,5 24,51 26,36 25,81 27,56
9 Longitud nalga-
rodilla [cm] 18,1 18,98 20,41 21,3 22,22 23,07 23,76 24,52 25,94 26,45 27,31 27,65
10 Longitud nalga-
poplíteo [cm] 15,24 15,83 17,18 17,77 18,7 19,24 20 20,45 21,49 21,85 22,63 22,85

61
Anexo B: Configuraciones de sistema de plegado.
A continuación, se presentan las dos configuraciones de sistema de plegado con diseño
orientado al ensamble consideradas previamente a la concepción del diseño finalmente
seleccionado.
La primera de ellas, presentada en la Ilustración 68, fue descartada por el espacio disponible
para realizar la unión por soldadura a lo largo de la circunferencia de la pieza inferior. Por
otro lado, al considerarse como alternativa realizar una unión roscada, la ubicación de la
misma creaba una desventaja en el ajuste, aumentando la holgura deseada y creando un punto
de potencial falla.
Ilustración 68. Primera configuración de sistema de plegado y falencia encontrada.
El segundo diseño buscó corregir la condición de potencial aumento de holgura durante el
uso, reubicando la pieza afectada en la zona superior. Sin embargo, este fue descartado por
la disponibilidad de materiales en el mercado para manufacturarlo, especificamente, el
espesor de la tubería exterior, por lo cual hubiera sido necesario maquinarla a partir de una
pieza solida, lo cual en el material seleccionado era complejo y costoso.
Ilustración 69. Segunda configuración de sistema de plegado.

62
Anexo C: Parámetros y ecuaciones para el diseño del resorte [40].
La información contenida en las tablas presentadas a continuación fue tomada como
referencia para el análisis de diseño del resorte que acciona el sistema de plegado. El alambre
seleccionado fue la referencia Alambre de piano con un espesor de 1,2 mm.
Tabla 16. Valores de contantes para diseño de resortes a compresión.
Tabla 17. Propiedades mecánicas de alambres para resortes.

63
Tabla 18. Fórmulas de diseño de resortes según sus extremos.

64
Anexo D: Verificación para diseño de resorte (simulación).
A continuación, se presentan los resultados obtenidos desde el generador de resortes a
compresión a partir de los parámetros de diseño necesarios para su adecuado acople con la
estructura y funcionamiento.
Ilustración 70. Resultados de generador de resortes (Autodesk Inventor).

65
Anexo E: Información técnica de ruedas.
La ficha técnica a continuación corresponde a la referencia de ruedas seleccionadas para el
dispositivo.