constrained quadratic programming and neurodynamics-based...
TRANSCRIPT

Research ArticleConstrained Quadratic Programming and Neurodynamics-BasedSolver for Energy Optimization of Biped Walking Robots
LiyangWang1 Ming Chen1 Xiangkui Jiang2 andWeiWang3
1Department of Electronic Engineering Shunde Polytechnic Foshan Guangdong 528300 China2School of Automation Xirsquoan University of Posts and Telecommunications Xirsquoan 710121 China3College of Power and Mechanical Engineering Wuhan University Wuhan 430072 China
Correspondence should be addressed to Liyang Wang wangliyang09126com
Received 17 February 2017 Revised 16 July 2017 Accepted 3 August 2017 Published 17 September 2017
Academic Editor Dan Simon
Copyright copy 2017 Liyang Wang et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The application of biped robots is always trapped by their high energy consumptionThis papermakes a contribution by optimizingthe joint torques to decrease the energy consumption without changing the biped gaits In this work a constrained quadraticprogramming (QP) problem for energy optimization is formulated A neurodynamics-based solver is presented to solve theQP problem Differing from the existing literatures the proposed neurodynamics-based energy optimization (NEO) strategyminimizes the energy consumption and guarantees the following three important constraints simultaneously (i) the force-momentequilibrium equation of biped robots (ii) frictions applied by each leg on the ground to hold the biped robot without slippage andtipping over and (iii) physical limits of the motors Simulations demonstrate that the proposed strategy is effective for energy-efficient biped walking
1 Introduction
Biped robots receive a lot of attention from the scientists andengineers these years [1ndash10] Compared with wheeled drivenrobots and crawler robots biped robots have anthropomor-phic adaptability to unstructured environments with relativeless energy consumption However Hondarsquos ASIMO perhapsrepresentative of humanoid robots uses at least 10 times theenergy (scaled as dimensionless specific cost of transport) of atypical human [11] Energy consumption of the existing bipedrobots is much more than that of human being
Two main kinds of approaches have been presented tooptimize the energy efficiency for legged robots the firsttype focuses on the improvements of mechanical device [11ndash14] and the second type is devoted to better optimizationalgorithm [15ndash19]
A well-known improvement of biped mechanical deviceis brought by ldquosemipassive walkersrdquo Numerous very success-ful ldquosemipassive walkersrdquo have been built [11] such as theCornell biped the Delft biped and the MIT learning bipedrobotsThese robots are built based on passive dynamics with
small active power sources substituted for gravity which canwalk on level ground However uneven ground leads to fallsof the Cornell biped robot and floor irregularities lead to fallsof the Delft biped robot Although the MIT learning bipedrobot continually learns and adapts to the terrain as it walksits energy consumption is especially high
From another aspect several auxiliary devices aredesigned to decrease energy consumption of legged robotsIn [12] an elastic load suspension mechanism was developedand utilized on a hexapod robot to increase the energyefficiency of legged robot locomotion The experimentsdemonstrate that the robot with an elastically suspended loadconsumed up to 24 less power than with a rigidly attachedload In [13] a flexible shoe system was proposed for bipedrobots to optimize energy consumption of the lateral planemotionThe shoe system can absorb the kinetic energy of therobot which is confirmed by simulations and experimentsIn [14] the energy efficiency of a humanoid robot with spinalmotion was investigated Simulations show that with theadditional degrees of freedom (DoF) in the torso the robot
HindawiMathematical Problems in EngineeringVolume 2017 Article ID 6725427 15 pageshttpsdoiorg10115520176725427
2 Mathematical Problems in Engineering
requires 265 less energy than its rigid-torso counterpart tocomplete the same walking
Differing from various mechanical devices for decreasingthe energy consumption of legged robots optimization algo-rithms can be usedmorewidely because this kind of approachis applicable to all the robots with actuators Motivated bytrunk rotations of human being an algorithm based on fuzzylogic and iterative optimization [15] provides a remarkabledescend rate of energy consumption for biped robots In[16] an online gait synthesis algorithmcompromisingwakingstability and energy efficiency is proposed and the parametersare optimized for a given travel distance minimizing theenergy consumed by the actuators In [17] a reference genera-tion algorithmwas proposed for biped robots based on linearinverted pendulummodel Simulation results suggest that theproposed moving zero-moment-point (ZMP) references aremore energy-efficient than the ones with fixed ZMP underthe supporting foot However when decreasing the energyconsumption of biped robots the reported works neglect theinevitable presence of some inside constraints including thereaction forces from the ground frictional force between thefeet and the ground and some limitations of the biped joints
On the other hand some recent works have been donein modeling measuring estimating and rejecting the unde-sired force introduced to the dynamics of robots Fakoorianet al [18] designed a continuous-time extended Kalman filter(EKF) and a continuous-time unscented Kalman filter (UKF)to estimate not only the states of the robot system but also theground reaction forces that act on the foot Moosavi et al [19]designed a nonlinear controller for second-order nonlinearuncertain dynamical systems The results demonstrate thatthe proposed method is a partly model-free controller thatworks well in certain and partly uncertain system Differingfrom the existing literatures the proposed neurodynamics-based energy optimization (NEO) strategy minimizes theenergy consumption and guarantees the following threeimportant constraints simultaneously (i) the force-momentequilibrium equation of biped robots (ii) frictions appliedby each leg on the ground to hold the biped robot withoutslippage and tipping over and (iii) Physical limits of themotors
In this work in order to provide optimal controller tomeet all the above-mentioned constraints a QP problemis formulated to deal with the constrained optimizationproblemUtilizing the dynamicsmodel an objective functionbased on energy-efficiency optimization can be computedso that the control input can be produced within systemconstraints Furthermore the optimized control outputs needto be available as the robot moves on at each step Thereforeonline implementation is the next fundamental issue in theenergy efficiency optimizationWhether the energy optimumcontrol can be implemented successfully is dependent on theefficiency of online optimization
To solve the proposed constrained optimization problemin real time neurodynamics-based QP solvers are consideredbecause of their sufficient online computational power [20ndash22] Several optimal controls for robots have been realizedusing neural network optimization [23ndash25] In this paperconsidering the physical constraints on biped motions a
novel neurodynamics-based energy-efficiency optimizationcontroller is developed The strategy for optimizing theenergy efficiency is formulated as a constrained QP problemwhich can be solved online using a primal-dual neural net-work (PDNN) Simulation studies are presented to illustratethe feasibility of the proposed strategy
Main contributions of this work could be summarized asfollows
(i) A new complete model for energy optimization ofbiped walking robots is built Several necessary phys-ical constraints for the biped system are formulatedin the optimization controller which provides a morepractical objective for the energy optimization ofbiped robots
(ii) A neurodynamics-based solver is presented to handlethe proposed optimization problem To the best of ourknowledge no works on biped walking using energyoptimum control based on neural network have beenreported before
The organization of this paper is as follows In Section 2the background about the energy consumption of bipedwalking robots is presented A QP problem for the energyoptimization is formulated in Section 3 Section 4 proposed aneurodynamics-based solution for the proposed QP problemto realize the energy optimization Section 5 presented thediagram of the neurodynamics-based energy optimizationcontrol system Simulation results are provided in Section 6followed by the conclusions in Section 7
2 Energy Consumption ofa Biped Walking Robot
The main idea is to optimize the energy consumption of abiped robot walking on horizontal ground For optimizationpurposes we consider the following assumptions
Assumption 1 We assume that the robot walks on practicablehorizontal terrain Therefore there are no forbidden zonesand every foot can be placed on the ground and providesupport to the robot
Assumption 2 We assume that all the motors in the bipedjoints have the same configurations The robotrsquos actuators arebased on DC electric motors (electrical motors cannot storethe gains of negative energy) [26 27]
Assumption 3 Consider a biped robot with point contactsbetween the ground and each foot Assume that each footcontacts the ground with Coulomb friction
The energy consumption of a biped robot is given by thesum of the energy consumed in every joint plus the energyconsumed by electronic equipment (computers drivers ana-log IO etc)The contribution of the latter is out of the scopeof this work
Mathematical Problems in Engineering 3
If a joint is driven by an electrical motor the consumedenergy is given by
119864 (119905) = int119906 (119905) 119894 (119905) 119889119905 (1)
where 119906(119905) is the voltage and 119894(119905) is the current through themotor As a normal practice in modeling DC motors forrobotic joints [27] the following electrical model of a motoris considered here
119906 (119905) minus 119896119864120596 (119905) = 119877119894 (119905) + 119871 119889119889119909119894 (119905) 1205911015840 (119905) = 119896119872119894 (119905) (2)
where 119877 represents the resistance of the motor and 120596(119905)denotes the rotation speed of the motor 119896119864 is the backelectromotive constant 119896119872 denotes the torque constant and1205911015840(119905) represents the motor torque As a first approximation tothe model we consider the rotor inductance 119871 to be nullNote that in standard international unit the value of 119896119872 is thevalue of 119896119864 that is 119896119872 (NmA) = 119896119864 (Vs)
Substituting (2) into (1) we obtain
119864 (119905) = int119906 (119905) 119894 (119905) 119889119905= int[120596 (119905) 1205911015840 (119905) + 1198771198962119872 [1205911015840 (119905)]2]119889119905
(3)
According to Assumption 2 the energy 119864119894119895 expended bythe motor of joint 119895 of leg 119894 during time 119879 can be given by
119864119894119895 (119905) = int1198790Δ [120596119894119895 (119905) 1205911015840119894119895 (119905)] + 1198771198951198962119872119895 [1205911015840119894119895 (119905)]2119889119905 (4)
where 119894 = 1 2 denotes the serial number of the legs and 119895 =1 119899 is the serial number of the jointsmotors in one legThe function Δ(sdot) is defined as
Δ (119910) = 119910 if 119910 gt 00 if 119910 le 0 (5)
Taking into consideration all joints in the biped robot thetotal energy consumption becomes
119864 = int1198790
2sum119894=1
119899sum119895=1
Δ [120596119894119895 (119905) 1205911015840119894119895 (119905)] + 1198771198951198962119872119895 [1205911015840119894119895 (119905)]2119889119905 (6)
Considering the practical differences between the rotationspeed and torques in joint 119895 and motor 119895 of leg 119894 joint gearratio 119873119895 and the joint gearrsquos mechanical efficiency 120578119895 areintroduced here Thus 120579119894119895 = 120596119894119895119873119895 and 120591119894119895 = 1205781198951198731198951205911015840119894119895 where120579119894119895 and 120591119894119895 represent the speed and torques in joint 119895 of leg 119894while 120596119894119895 and 1205911015840119894119895 represent those in motor 119895 of leg 119894Therefore(6) can be rewritten as
119864= int1198790
2sum119894=1
119899sum119895=1
Δ( 120579119894119895 (119905) 120591119894119895 (119905)120578119895 ) + 119877119895119896211987211989512057821198951198732119895 [120591119894119895 (119905)]2119889119905 (7)
The main goal of this work is to minimize the expendedenergy 119864 given by (7) Then the objective function can bepresented as
Φ = minint119879
0
2sum119894=1
119899sum119895=1
[Δ( 120579119894119895 (119905) 120591119894119895 (119905)120578119895 ) + 119877119895119896211987211989512057821198951198732119895 [120591119894119895 (119905)]2]119889119905 (8)
In the next section the energy-efficiency optimizationproblem will be formulated as a QP problem which can besolved online using neurodynamics
Remark 4 Load plays a crucial role in the application ofthe robot In [28] the combination of neural network (NN)proportional derivative (PD) and robust controller is used fordetermining the maximum load-carrying capacity (MLCC)of articulated robots subject to both actuator and end-effector deflection constraints The proposed technique isthen applied to articulated robots and MLCC is obtained fora given trajectory Literature [29] provides accurate estimatesof the robot load inertial parameters and accurate actuatortorques predictions both of which are essential for the accep-tance of the results in an industrial environment The keyelement to the success of this work is the comprehensiveness
of the applied model which includes besides the dynamicsresulting from the robot load and motor inertia the couplingbetween the actuator torques the mechanical losses in themotors and the efficiency of the transmissions
From the literatures we know that load is not the onlyfactor that demands the torque In this work the weight ofthe robot is considered as the load
3 Formulate a QP Problem forEnergy-Efficient Biped Robots
The objective function shown in (8) can be expressed as thefollowing optimization problemΦ = min [12120591119879119876120591 +max (119888119879120591 0)] (9)
4 Mathematical Problems in Engineering
where
119876 = 2119877119896211987212057821198732 1198682119899times2119899119888 = [ 12057911120578 1205791119899120578 12057921120578 1205792119899120578 ]119879
(10)
120591 = [12059111 1205911119899 12059121 1205912119899]119879 119883 = max(119880 119881) denotesthat the elements 119909119894119895 in the matrix 119883 are equal to the biggerelements between 119906119894119895 in the matrix119880 and V119894119895 in the matrix 119881The problem shown in (9) should guarantee three necessaryconstraints
(i) The force-moment equilibrium equation of bipedrobots
(ii) Frictions applied by each leg on the ground to holdthe biped robot without slippage and tipping over
(iii) Physical limits of the motors
Let us beginwith the force-moment equilibrium equationfor the whole biped system which can be written as119860119865 = 119882 (11)
where 119865 = [1198911198791 1198911198792 ]119879 is a vector of the ground reaction forcesacting on the left foot and the right foot
119860 = [119868119899times119899 119868119899times1198991198611 1198612 ]119861119894 = [[[[
0 minus119861119875119894119865119911 119861119875119894119865119910119861119875119894119865119911 0 minus119861119875119894119865119909minus119861119875119894119865119910 119861119875119894119865119909 0
]]]] (12)
where 119861119875119894119865 = [119861119875119894119865119909 119861119875119894119865119910 119861119875119894119865119911]119879 denotes the posi-tion of leg 119894 referring to basic coordinate frame 119882 =[119865119909 119865119910 119865119911119872119909119872119910119872119911]119879 contains the forces and momentsacting on the robotrsquos center of gravity (COG)
Biped dynamics provide the relevance between groundreaction forces acting on the feet and the joint torques of thelegs Consider the 119894th leg of a biped robot the dynamics of thesystem can be expressed in the vector-matrix form as
120591119894 + 119869119879119894 (120579119894) 119891119894 = 119863119894 (120579119894) 120579119894 + ℎ119894 (120579119894 120579119894) + 119892119894 (120579119894) (13)
where 120579119894 = [1205791198941 120579119894119899]119879 is a 2119899 times 1 joint position vector ofthe 119894th leg 119894 = 1 2 for the biped robot 119863119894 is the 2119899 times 2119899inertia matrix of the leg ℎ119894 is a 2119899 times 1 vector of centrifugaland Coriolis terms 119892119894 is a 2119899 times 1 vector of gravity terms 120591119894is the 2119899 times 1 vector of joint torques 119891119894 is the 2119899 times 1 vectorof ground reaction forces of the 119894th leg and 119869119894 is the Jacobianmatrix from the joints of the 119894th leg to the basic coordinatespace Equation (13) can be rewritten as
119891119894 = 119869minus119879119894 (120579119894) [119863119894 (120579119894) 120579119894 + ℎ119894 (120579119894 120579119894) + 119892119894 (120579119894) minus 120591119894] (14)
Replacing 119891119894 in (11) with (14) the force-moment equilibriumequation (11) can be written as
119860120591 = (15)
where 119860 is an equilibrium matrix for the torque and
119860 = 119860[119869minus1198791 (1205791) 00 119869minus1198792 (1205792)] = 119860[[
1198631 (1205791) 1205791 + ℎ1 (1205791 1205791) + 1198921 (1205791)1198632 (1205792) 1205792 + ℎ2 (1205792 1205792) + 1198922 (1205792)]] minus119882(16)
Equation (15) is the first constraint describing the force-moment equilibrium equation of biped robots
On the other hand considering the friction applied by theleg on the ground the second constraint can be written as
119860ueq120591 le 119861ueq (17)
where 119860ueq isin 119877119898 is the coefficient matrix of the frictionconstraint for the feet
119861ueq = 119860ueq [[1198631 (1205791) 1205791 + ℎ1 (1205791 1205791) + 1198921 (1205791)1198632 (1205792) 1205792 + ℎ2 (1205792 1205792) + 1198922 (1205792)]]
119860ueq = [120583 00 120583] sdot [119869minus1198791 (1205791) 00 119869minus1198792 (1205792)] (18)
where 120583 is the Coulomb friction coefficient between the feetand the touched ground
The third constraint is about the physical limits of themotors which has the form of 120585minus le 120591 le 120585+ 120585minus and 120585+ areknown torque vectors according to the motors in the robot120585minus isin 1198772119899 and 120585+ isin 1198772119899
From the above the energy-efficiency optimization prob-lem can be formulated as the following QP problem
min 12120591119879119876120591 +max (119888119879120591 0) (19)
st 119860120591 = (20)119860ueq120591 le 119861ueq (21)120585minus le 120591 le 120585+ (22)
where the definitions of the symbols can be found in (9) (15)and (17)
Mathematical Problems in Engineering 5
As we can see now the strategy for minimizing theenergy consumption of biped robots is finally formulated as aconstrained QP problem (see (19)ndash(22)) In the next sectionwe are going to solve this QP problem using neurodynamics
4 Solve the QP Problem forEnergy Optimization
First of all the QP problem described in (19)ndash(22) needs tobe converted to a LVI problem For this purpose 120594 and 120573are defined as the dual decision vectors corresponding to theequality constraint (20) and the inequality constraint (21)respectively As a result the primal-dual decision vector119910 andits upperlower bounds 119910plusmn are defined as follows
119910 fl [[[120591120594120573]]]
119910+ fl [[[[120585++120594++120594+]]]]
119910minus fl [[[[120585minusminus120594+minus120594+]]]] isin 119877
2119899+119897+119898(23)
where elements 120594+119894 ≫ 0 in 120594+ are defined sufficientlypositive to represent infinity for any 119894 for the convenience ofsimulation and hardware implementation of the operationThe convex set Ω made by primal-dual decision vector 119910 ispresented as Ω = 119910minus le 119910 le 119910+ Then the QP problem in(19)ndash(22) is equivalent to the following LVI problem
(119910 minus 119910lowast)119879 (119872119910lowast + 119901) ge 0 forall119910 isin Ω (24)
That is to say we need to find a vector 119910lowast isin Ω = 119910 | 119910minus le119910 le 119910+with a coefficient matrix119872 and a vector 119901 as follows119872 fl
[[[[119876 minus119860119879 119860119879ueq119860 0 0minus119860ueq 0 0
]]]] isin 119877(2119899+119897+119898)times(2119899+119897+119898)
119901 fl [[[[119888minus119861ueq]]]] isin 119877
(2119899+119897+119898)(25)
As a summary of this step a theorem and the correspondingproof are given below
Theorem 5 (see [21] (LVI formulation)) The QP problem in(19)ndash(22) is equivalent to the following LVI problem that isto find a vector 119910lowast isin Ω = 119910 | 119910minus le 119910 le 119910+ such that(119910 minus 119910lowast)119879(119872119910lowast + 119901) ge 0 forall119910 isin Ω where coefficients 119910plusmn119872and 119901 are defined in (24) and (23) respectively
Proof From [21] we know that the Lagrangian dual prob-lem of the QP problem in (19)ndash(22) is to maximizeinf120591isin1198772119899119871(120591 120594 Vminus V+) over 120594 Vminus ge 0 and V+ ge 0 where119871 (120591 120594 Vminus V+) = 2119899sum
119894=1
[121205911198942119876119894 + 119888119894120591119894 + 120594119894 (minus119860 119894120591119894 + 119894)+ 120573119894 (119860ueq 119894120591119894 minus 119861ueq 119894) + V119894minus (minus120591119894 + 120585119894minus)+ V119894+ (120591119894 minus 120585119894+)]
(26)
Note that function 119871(120591 120594 Vminus V+) is convex with given 120594 isin119877119897 Vminus isin 1198772119899 and V+ isin 1198772119899 Therefore the necessary andsufficient condition for a minimum is2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894120594119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0 (27)
Thus the dual problem of (19)ndash(22) can be derived as
maximize2119899sum119894=1
[121205911198942119876119894 + 119888119894120591119894 + 120594119894 (minus119860 119894120591119894 + 119894) + 120573119894 (119860ueq 119894120591119894 minus 119861ueq 119894) + V119894minus (minus120591119894 + 120585119894minus) + V119894+ (120591119894 minus 120585119894+)]subject to
2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894119910119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0120594119894 unrestricted V119894minus ge 0 V119894+ ge 0(28)
Multiplying both sides of (27) by 120591 we haveminus 2119899sum119894=1
1205911198942119876119894= 2119899sum119894=1
[120591119894119888119894 minus 120591119894119860 119894120594119894 + 120591119894119860ueq119894120573119894 + 120591119894 (minusV119894minus + V119894+)] (29)
Then the dual form can be rewritten as
maximize2119899sum119894=1
[minus121205911198942119876119894 + 119894120594119894 minus 119861ueq 119894120573119894 + 120585119894minusV119894minus minus 120585119894+V119894+]subject to
2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894120594119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0
6 Mathematical Problems in Engineering
120594119894 unrestricted V119894minus ge 0 V119894+ ge 0(30)
To obtain the optimum (120591lowast 120594lowast Vminuslowast V+lowast) of the primal prob-lem (see (19)ndash(22)) and its dual problem (see (30)) thenecessary and sufficient conditions are as follows
Primal feasibility
2119899sum119894=1
(119860 119894120591119894lowast minus 119894) = 0 (31)
2119899sum119894=1
(minus119860ueq 119894120591119894lowast + 119861ueq 119894) ge 02119899sum119894=1
120585119894minus le 2119899sum119894=1
120591119894lowast le 2119899sum119894=1
120585119894+ (32)
Dual feasibility
2119899sum119894=1
(119876119894120591119894 + 119888119894 minus 119860 119894119910119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+) = 0120594119894 unrestricted 120573119894 ge 0 V119894minus ge 0 V119894+ ge 0 (33)
Complementarity
2119899sum119894=1
120573119894lowast (minus119860ueq 119894120591119894lowast + 119861ueq 119894) = 0 (34)
2119899sum119894=1
V119894minuslowast (minus120591119894lowast + 120585119894minus) = 0 (35)
2119899sum119894=1
V119894+lowast (120591119894lowast minus 120585119894+) = 0 (36)
To simplify the above necessary and sufficient conditionsby defining Vlowast119894 = Vminuslowast119894 minus V+lowast119894 and considering (35)-(36) dualfeasibility constraint (33) becomes
2119899sum119894=1
(119876119894120591119894lowast + 119888119894 minus 119860 119894120594119894lowast + 119860ueq 119894120573119894lowast)= 2119899sum119894=1
V119894lowast
le 0 120591lowast119894 = 120585+119894= 0 120591lowast119894 isin (120585minus119894 120585+119894 )ge 0 120591lowast119894 = 120585minus119894 (37)
which is equal to the following LVI problem to find anoptimum 120591lowast isin Ω1 such that
2119899sum119894=1
(120591119894 minus 120591119894lowast) (119876119894120591119894lowast + 119888119894 minus 119860 119894120594119894lowast + 119860ueq 119894120573119894lowast) ge 0forall120591 isin Ω1 (38)
whereΩ1 = 120591 | 120585minus le 120591lowast le 120585+
In addition by defining Ω2 fl 120594 | 120594 isin 119877119897 we have thefollowing LVI for the equality constraint (31) to find 120594lowast isin Ω2such that
2119899sum119894=1
(120594119894 minus 120594119894lowast) (119860 119894120591119894lowast minus 119894) ge 0 forall120594 isin Ω2 (39)
Similarly by defining Ω3 = 120573 | 120573 isin 119877119898 we havethe following LVI for the inequality constraint (32) and theequality constraint (34) to find 120573lowast isin Ω3 such that2119899sum119894=1
(120573119894 minus 120573119894lowast) (minus119860ueq 119894120591119894lowast + 119861ueq 119894) ge 0 forall120573 isin Ω3 (40)
By taking the Cartesian product of the three sets Ω1Ω2 and Ω3 defined above we formulate the convex set Ωpresented in (24) as follows
Ω = Ω1 times Ω2 times Ω3 = 119910 = (120591119879 120594119879 120573119879)119879isin 119877(2119899+119897+119898) | 120585minus le 120591lowast le 120585+ 120594 unrestricted 120573 ge 0= 119910 =
[[[120591120594120573]]] isin 119877(2119899+119897+119898) |
[[[[120585minusminus120594+minus120594+]]]] le[[[120591120594120573]]]
le [[[[120585+120594+120594+]]]] = 119910 isin 119877
(2119899+119897+119898) | 119910minus le 119910 le 119910+ (41)
In consequence LVIs (38)ndash(40) can be combined into an LVIin the matrix form that is to find an optimum 119910lowast isin Ω suchthat 119910 = (120591119879 120594119879 120573119879)119879 isin Ω and([[[120591120594120573]]] minus [[[
120591lowast120594lowast120573lowast]]])119879
sdot ([[[[119876 minus119860119879 119860119879ueq119860 0 0minus119860ueq 0 0
]]]][[[120591lowast120594lowast120573lowast]]] +
[[[[119888minus119861ueq]]]])
ge 0 forall[[[120591120594120573]]] isin Ω
(42)
Contrasting the definitions of 119910plusmn in (23) and119872 and 119901 in (25)the above LVIs (see (42)) are exactly in the compact form (see(25)) as the equivalence ofQPproblem in (19)ndash(22)Theproofis then completed
On the other hand from [20] it is known that LVI in(25) is equivalent to the following system of piecewise linearequations 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 = 0 (43)
Mathematical Problems in Engineering 7
where 119875Ω(sdot) is a piecewise linear projection operator with the119894th projection element of 119875Ω(119910) = [119875Ω(1199101) 119875Ω(1199102119899+119897+119898)]119879being defined as
119875Ω (119910119894) = 119910minus119894 if 119910119894 lt 119910minus119894119910119894 if 119910minus119894 le 119910119894 le 119910+119894 119910+119894 if 119910119894 gt 119910+119894 forall119894 isin 1 2119899 + 119897 + 119898
(44)
To solve linear projection equation (43) the dual dynamicalsystem design approach presented in [20] is adopted tobuild a dynamical system Considering the asymmetric 119872a primal-dual neural network is developed as follows to solve(43) 119910 = 120574 (119868 +119872119879) 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (45)
where 120574 gt 0 is a design parameter used to scale theconvergence rate of the system The convergence rate isimproved when the value of 120574 is increased Furthermore byreplacing 120574(119868+119872119879)with 120572 the dynamical system (45) can berewritten as follows119910 = 120572 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (46)
where 120572 is a positive design parameter for the convergencerate of the PDNN (see (46)) About the convergence analysisof the above-mentioned primal-dual dynamical solver thereis a theorem presented as follows
Theorem 6 (see [22]) Starting from any initial state thestate vector 119910(119905) of primal-dual dynamical system (45) isconvergent to an equilibrium point 119910lowast of which the first 2119899elements constitute the optimal solution 120591lowast to the quadraticprogramming problem in (19)ndash(22) Moreover the exponentialconvergence can be achieved if there exists a constant 120588 gt 0such that 1003817100381710038171003817119910 minus 119875Ω (119910 minus (119872119910 + 119901))100381710038171003817100381722 ge 120588 1003817100381710038171003817119910 minus 119910lowast100381710038171003817100381722 (47)
Remark 7 As a primal-dual dynamical solver primal-dualneural networks can efficiently generate exact optimal solu-tions [21] Furthermore compared to dual neural networksthe LVI- (linear variational inequality-) based primal-dualneural networks do not entail any matrix inversion onlineso that they can reduce the computational time greatly [20]Therefore a LVI-based primal-dual neural network is appliedto perform theminimization of the energy consumptionwithequality and inequality constraints for biped robots in thiswork
5 Neurodynamics-Based EnergyOptimization Control
Over the past two decades much progress has been madein the control of robot systems based on various controltechniques In [30] two novel robust adaptive PID control
schemes are proposed to solve the strong nonlinearity andcoupling problems in robot manipulator control In [31] asupport vector regression-based control system is proposedto learn the external disturbances and increase the zero-moment-point stability margin of humanoid robots In [32]a kinematics open-loop control system of hexapod robot withan embedded digital signal controller is proposed In [33] anopen-loop controller is implemented on field programmablegate array (FPGA) of the robot Experimental results revealthe viability of the proposed controller
On the other hand many mature techniques have beenused to track the planned trajectories with a certain controlstrategy In [34] a trajectory generator and a joint trajectorytracking controller are designed The proposed combinationis successfully implemented and the robot is able to walkat 011ms Literature [35] considers the problem of jointtrajectory control with oscillations cancelling for planarmultilink flexible manipulators A feed-forward torque isdesigned to preset the elastic coordinates of the system sothat the controller is able to drive the arm along the desiredtrajectory In [36] in order to reduce gait planning andto get a good tracking performance master-slaver dual-legcoordination control was proposed for the biped robot withheterogeneous legs In [37] an open-closed-loop iterativelearning control algorithm with angle correction term isproposed which uses the error signal and the deviation oftwo adjacent error signals to adjust itself
In this work the proposed neurodynamics-basedmethodis an open-loop controller As shown in Figure 1 controlmethod based on energy-efficiency optimization is proposedto obtain the trade-off between the force-moment equilib-rium and energy efficiency for biped walking by minimizingthe energy-related cost function while guaranteeing physicalconstraints There are two parts in the control system QPproblem for energy optimization and a LVI-based primal-dual neural network for solving the QP problemThe controlobject of the proposedmethod is to follow the planned trajec-tories for the biped joints using optimal joint torques deducedby the proposed controller The inputs of the controllerinclude the planned trajectories for the biped joints theforce-moment equilibrium equation of biped robot frictioncoefficient between the ground and the robot and physicalparameters of the motors equipped on the robotThe outputsof the controller are the optimal joint torques for the bipedjoints which are deduced using a LVI-based primal-dualneural network
Firstly the strategy for optimizing the energy efficiencyis formulated as a constrained QP problem Three importantphysical constraints for the biped system are formulated inthis QP problem for energy optimization of biped walkingrobots
Secondly a neurodynamics-based solver is presented tosolve the proposed constrained optimization problem
Thirdly joint trajectories are planned for the biped robotThe planned trajectories provide parameters for the force-moment equilibrium equation of biped robot which is oneof the constraints of the energy optimization QP problem Sothe biped robot is able to make the step and does not fall
8 Mathematical Problems in Engineering
QP problem for energy optimization of biped robots
(see equations (19)ndash(22))
LVI-based primal-dual neural network (PDNN) (see equation (46))
Biped robot
Q
c
p
y
+
+
M
Bipedwalking
Gaitplanning
plusmn
plusmn
PΩ(middot)
I minus M
y
lowast
int
minus le le +
AOK le BuK
st A = W
GCH (12)TQ + GR(cT 0)
minus
minus
[c minusW BOK]T
sum
sum
[[[[[
Q minusAT ATOK
A 0 0
minusAOK 0 0
]]]]]
Figure 1 Neurodynamics-based energy optimization strategy for biped robots
B y
x
z
1
2
3
4
5
6
LNB
LH
LMB
Figure 2 Simplified model of the biped robot
Table 1 Main parameters of the biped robot
Link Length (m) Mass (kg) Inertia moment (kgsdotm2)Torso 0175 1060 001623Thigh 0130 0075 (times2) 000037 (times2)Shank 0130 0075 (times2) 000037 (times2)Foot 0020 0060 (times2) 000004 (times2)6 Simulation Research
To verify the effectiveness of the proposed energy-efficiencycontrol method some simulations are implemented in thissection Matlab is used to model the biped robot and thecontroller
61 Structure and Parameters of the Biped Robot Considera planar biped robot with 6 degrees of freedom shown inFigure 2 The robot consists of one torso and two legs Themain parameters of the biped robot can be found in Table 1
Typical gait is planned for this simulated biped robot towalk on the horizontal ground In this work it is assumed thatthe torso of the biped robotmoves at a constant velocitywith aconstant heightTheCOGof the simplifiedmodel is located atthe geometric center of the torsoThe basic coordinate frame
with its origin at the COG is defined as a body-fixed frameThe whole walking period of the biped robot is considered tobe composed of a single-support phase and an instantaneousdouble-support phase The supporting foot is assumed toremain in full contact with the ground during the single-support phase The trajectories of the ankles and the hips aregiven as follows119910119886 (119896) = 119886120587 2120587119873 + 1119896 minus sin( 2120587119873 + 1119896)
119911119886 (119896) = 119889120587 1 minus cos( 2120587119873 + 1119896)119910ℎ (119896) = 12119910119886 (119896) + 1198862119911ℎ (119896) = 12119911119886 (119896) + 119871 th + 119871 sh minus 1198892 (48)
where 119910ℎ(119896) and 119911ℎ(119896) denote the position of the hip and119910119886(119896) and 119911119886(119896) denote the position of the swinging anklejoint at the 119896th sample 119886 is the walking step length and 119889is the height of swinging ankle 119873 + 1 is the total samplingnumber in a walking cycle 119879 119871 th and 119871 sh are the lengths oflower limbs Here 119889 = 002m and 119879 = 1 s62 Parameters for the QP Problem and the Neurodynamics-Based Solver For the parameters of the constrained QPproblem in (19)ndash(22) the parameters of the motors aredetermined by the motors that are equipped in the robotHere we take a set of typicalmotor parameters as an exampleThe electric resistance of the motor 119877 = 917 (Ω) torqueconstant 119896119872 = 168 times 10minus3 (NmA) gear reduction rate119873 = 200 and the joint gearrsquos mechanical efficiency 120578 = 07Submitting all the above-mentioned parameters to (9) wehave 119876 = 3321198686times6 and 119888 = 143[ 12057911 12057912 12057913 12057921 12057922 12057923]119879where 120579119894 = [ 1205791198941 1205791198942 1205791198943]119879 is the joint velocity vector of the119894th leg Here the joint velocity can be calculated using thegait planned in Section 61 Consider the 119894th leg of a bipedrobot 120579119894(119896 + 1) = [120579119894(119896 + 1) minus 120579119894(119896)]Δ119905 119894 = 1 2 where120579119894(119896 + 1) denotes the joint velocity at the (119896 + 1)th sampleand Δ119905 is the sampling interval The smaller the value of Δ119905is the more accurate but the more computationally intensivethe joint velocity is [38]
Mathematical Problems in Engineering 9
Input layer Hidden layer Output layer
u8 = 1
u1 = 1
u7 = 7
uM = 7
11
12
ML
11
12
LJ
S( Msumm=1
m1um)
S( Msumm=1
m2um)
S( Msumm=1
mLum)
J =Lsuml=1
lJ middot1
(1 + eminussum=1 u)
1 =Lsuml=1
l1 middot1
(1 + eminussum=1 u)
Figure 3 Structure of the three-layered NN
For the constraint condition of force-moment equilib-rium equation the Coulomb friction coefficient depends onthe ground environmentHerewe take120583 = 06 as an exampleThe inertia matrix of the leg 119863119894 the centrifugal and Coriolisterms ℎ119894 and the gravity terms 119892119894 in the dynamic equationcan be calculated using the method shown in [39]
Considering the physical limits of the motors we have120585+ = minus120585minus = [12 12]119879For the neurodynamics-based solver the positive design
parameter for the convergence rate of the PDNN is 120572 = 01which is determined using the trial-and-error method
63 Biped Walking via Different Controllers The proposedcontrol method is tested on the control of the biped robotmentioned above by simulation experiments The perfor-mances of the proposed NEO are compared with those of theSVM control methods [40 41] and NN control methods
For the SVM controller the parameters include a penaltycoefficient 119862 = 1000 degree of the polynomial kernels 119902 = 2width of the RBF kernels 120590 = 015 and mixed coefficientof the mixed kernels 119886 = 095 When training the bipeddynamic we sample the joint variables in the period of 119879 =1 s and let the sampling interval be Δ119905 = 0005 s That isto say there are 200 sampling points in a single walkingperiod the desired sample set satisfying the ZMP criterionis (Θ1 1205911) (Θ200 120591200)
On the other side for comparison with the proposedNEO a three-layered backpropagation (BP) NN is built tocontrol the biped robot Details of the NN are introduced asfollows
Layer 1 (Input Layer) In this layer the input signal is directlytransferred to the next layer that is
119874(1)119898 = 119906119898 (49)
where 119906119898 = Θ = [1205791 1205792 1205796 1205791 1205792 1205796]119879 and 119898 =1 119872 (119872 = 12) is the input variable 119874(1)119898 is the outputof the input layer
Layer 2 (Hidden Layer) Each node in the hidden layerperforms a transfer operation using a Sigmoid function thatis
119874(2)119897 = 119878( 119872sum119898=1
120575119898119897119906119898) = 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (50)
where 119874(2)119897 is the output of the hidden layer 119878(sdot) is a Sigmoidfunction 119897 = 1 119871 is the index of the hidden unitsThe number of the hidden units is designed as 119871 = 20here using the trial-and-error method 120575119898119897 is the connectionweight between the input layer and the hidden layer Theinitial values of the connection weights can be selectedrandomly and different initial values could lead to differentperformance of the NN
Layer 3 (Output Layer) This layer performs the calculationfor the output of the whole network
120591119895 = 119871sum119897=1
120573119895119897 sdot 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (51)
where 120591119895 is the control torque for the 119895th biped joint 119895 =1 119869 (119869 = 6) 120573119895119897 is the connection weight between thehidden layer and the output layerThe initial values of 120573119895119897 canbe selected randomly
By using BP algorithm the NN is trained offline with the200 desired samples for 100 times The structure of the NN isshown in Figure 3
The proposed control method and the above-mentionedtwo intelligent methods are adopted to control the simulatedbiped robot respectively As we can see from Figures 4-5all the three methods can realize the planned biped walking
10 Mathematical Problems in Engineering
minus005
0
005
01
015
02
025
03
035
04
045z
(m)
015 02 025 03 035 04 045 0501x (m)
(a)
015 02 025 03 035 04 045 0501x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 0501x (m)
(c)
Figure 4 Biped walking using different controllers when the step length is 018m (a) SVM (b) NN and (c) the proposed NEO
Energy consumption trajectories are shown in Figures 6-7As shown in the figures the proposed NEO needs less energythan the other methods due to the proposed energy-basedoptimal control For example when the energy consumptionof all the joints is 15979 J for the proposed NEO the energyconsumption is 40910 J for the NN and 31168 J for the SVM(see Table 2) Furthermore the proposed NEO always needsless energy than the other two methods when different bipedmotions are considered (Motion 1 the step length is 018mMotion 2 the step length is 020m) At the same time theSVM controller exhibits greater energy efficiency comparedwith the NN controller The possible cause is that the SVM ismore efficient in learning the energy-efficient controller usinglimited samples
Remark 8 In the simulation section the robotrsquos joint trajec-tories are predefinedThis paper makes contribution by opti-mizing the joint torques to decrease the energy consumptionwithout changing the biped gaits
Table 2 Energy consumption comparisons with other methods
Method Step length (m) E (J)NN
01840910
SVM 31168The proposed NEO 15979NN
02083164
SVM 57229The proposed NEO 31400
Joint torques for different controllers when the step lengthis 020m are shown in Figures 8ndash13 As shown in thefigures the proposed NEO strategy exhibits smaller drivingtorques compared with the NN method and SVM methodIt is because we deduce the optimal joint torque for thebiped robot according to the proposed energy optimizationproblem As a result torque costs of the biped joints are
Mathematical Problems in Engineering 11
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(a)
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 05 055 0601x (m)
(c)
Figure 5 Biped walking using different controllers when the step length is 020m (a) SVM (b) NN and (c) the proposed NEO
NNSVMThe proposed NEO
0
100
200
300
400
500
600
700
800
900
Ener
gy co
nsum
ptio
n (J
)
02 04 06 08 10Time (s)
Figure 6 Energy consumption of the robot joints for different controllers when the step length is 018m
12 Mathematical Problems in Engineering
NNSVMThe proposed NEO
02 04 06 08 10Time (s)
0
200
400
600
800
1000
1200
1400
1600
1800
Ener
gy co
nsum
ptio
n (J
)
Figure 7 Energy consumption of the robot joints for differentcontrollers when the step length is 020m
50 100 150 2000Serial number of the samples
5
6
7
8
9
10
11
12
13
14
15
Join
t tor
que f
or 1
(Nm
)
NNSVMThe proposed NEO
Figure 8 Joint torque for 1205791 deduced by different control methods
reduced remarkably This contributes to the effectivenessof the proposed NEO strategy in terms of reducing theenergy consumption of biped robots At the same time theproposed NEO strategy minimizes the energy consumptionand guarantees three necessary constraints simultaneouslyTherefore the force-moment equilibrium equation of bipedrobots is guaranteed and the biped robot does not fall
On the other hand the SVM controller exhibits greaterenergy efficiency (realize the same motion with smaller driv-ing torques) compared with the NN controller The possiblecause is that the number of the learning samples for the NN
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
3
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 2
(Nm
)Figure 9 Joint torque for 1205792 deduced by different control methods
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 3
(Nm
)
Figure 10 Joint torque for 1205793 deduced by different control methods
controllers is not large enough in this work Conventionalmachine learning methods such as NN use empirical riskminimization (ERM) based on infinite samples which is dis-advantageous to the learning control based on small samplesizes for biped robots The SVM is direct implementationof the structural risk minimization (SRM) principle Thisdifference makes SVM more efficient in resolving the small-sample-sizes learning problems
7 Conclusions
To build a more practical objective function for the energyoptimization of biped robots three important constraints are
Mathematical Problems in Engineering 13
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus12
minus10
minus8
minus6
minus4
minus2
0
Join
t tor
que f
or 4
(Nm
)
Figure 11 Joint torque for 1205794 deduced by different control methods
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus10
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Join
t tor
que f
or 5
(Nm
)
Figure 12 Joint torque for 1205795 deduced by different control methods
incorporated into the optimal controller for biped robotsSimulation results demonstrate that the proposed NEO strat-egy effectively decreases the energy consumption of bipedwalking robot In addition the proposed strategy can guaran-tee the force-moment equilibrium equation and the physicallimits of the motors Coulomb friction is applied between theleg and the ground by setting a friction coefficient The bipedrobot can provide optimal joint torques without slippage ortipping over
It is worth noting that most of the existing algorithmsrealize the energy minimization via optimizing gait param-eters However gait parameters such as foot trajectoriesand the trajectories of the COG are not the only aspect
NNSVMThe proposed NEO
1
2
3
4
5
6
7
8
9
10
Join
t tor
que f
or 6
(Nm
)
50 100 150 2000Serial number of the samples
Figure 13 Joint torque for 1205796 deduced by different control methods
to be concerned Other factors such as the forces andmoments acting on the biped robot can also impose onenergy consumption of the biped robot to a large extent Forexample people walking in the mud or in a gale usually feelmore tiredTherefore when the foot trajectories and theCOGtrajectories are determined optimizing the torques of eachjoint is significant for the energy optimization of the wholebiped system This point is verified by simulations and theresults of this work are significant
In this work the proposed neurodynamics-basedmethodis an open-loop controller In the simulation experiments wedo not introduce any error accumulation during the bipedwalking So the simulated robot is able to follow the plannedtrajectories and does not fall However for a real robotsystem there must be error accumulation introduced by themechanical devices In this situation the biped robot tends todeviate from the reference trajectory if there is no feedbackand correction for error compensating Consequently futureworks will include the design of closed-loop controllerswhich are more suitable for real robot systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (Projects 61403264 and 61305098) andby the Natural Science Foundation of Guangdong Province(Project 2016A030310018) Grateful thanks go to Dr Ye Xian-Ming who gives considerable help by means of environmentsupport
14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
requires 265 less energy than its rigid-torso counterpart tocomplete the same walking
Differing from various mechanical devices for decreasingthe energy consumption of legged robots optimization algo-rithms can be usedmorewidely because this kind of approachis applicable to all the robots with actuators Motivated bytrunk rotations of human being an algorithm based on fuzzylogic and iterative optimization [15] provides a remarkabledescend rate of energy consumption for biped robots In[16] an online gait synthesis algorithmcompromisingwakingstability and energy efficiency is proposed and the parametersare optimized for a given travel distance minimizing theenergy consumed by the actuators In [17] a reference genera-tion algorithmwas proposed for biped robots based on linearinverted pendulummodel Simulation results suggest that theproposed moving zero-moment-point (ZMP) references aremore energy-efficient than the ones with fixed ZMP underthe supporting foot However when decreasing the energyconsumption of biped robots the reported works neglect theinevitable presence of some inside constraints including thereaction forces from the ground frictional force between thefeet and the ground and some limitations of the biped joints
On the other hand some recent works have been donein modeling measuring estimating and rejecting the unde-sired force introduced to the dynamics of robots Fakoorianet al [18] designed a continuous-time extended Kalman filter(EKF) and a continuous-time unscented Kalman filter (UKF)to estimate not only the states of the robot system but also theground reaction forces that act on the foot Moosavi et al [19]designed a nonlinear controller for second-order nonlinearuncertain dynamical systems The results demonstrate thatthe proposed method is a partly model-free controller thatworks well in certain and partly uncertain system Differingfrom the existing literatures the proposed neurodynamics-based energy optimization (NEO) strategy minimizes theenergy consumption and guarantees the following threeimportant constraints simultaneously (i) the force-momentequilibrium equation of biped robots (ii) frictions appliedby each leg on the ground to hold the biped robot withoutslippage and tipping over and (iii) Physical limits of themotors
In this work in order to provide optimal controller tomeet all the above-mentioned constraints a QP problemis formulated to deal with the constrained optimizationproblemUtilizing the dynamicsmodel an objective functionbased on energy-efficiency optimization can be computedso that the control input can be produced within systemconstraints Furthermore the optimized control outputs needto be available as the robot moves on at each step Thereforeonline implementation is the next fundamental issue in theenergy efficiency optimizationWhether the energy optimumcontrol can be implemented successfully is dependent on theefficiency of online optimization
To solve the proposed constrained optimization problemin real time neurodynamics-based QP solvers are consideredbecause of their sufficient online computational power [20ndash22] Several optimal controls for robots have been realizedusing neural network optimization [23ndash25] In this paperconsidering the physical constraints on biped motions a
novel neurodynamics-based energy-efficiency optimizationcontroller is developed The strategy for optimizing theenergy efficiency is formulated as a constrained QP problemwhich can be solved online using a primal-dual neural net-work (PDNN) Simulation studies are presented to illustratethe feasibility of the proposed strategy
Main contributions of this work could be summarized asfollows
(i) A new complete model for energy optimization ofbiped walking robots is built Several necessary phys-ical constraints for the biped system are formulatedin the optimization controller which provides a morepractical objective for the energy optimization ofbiped robots
(ii) A neurodynamics-based solver is presented to handlethe proposed optimization problem To the best of ourknowledge no works on biped walking using energyoptimum control based on neural network have beenreported before
The organization of this paper is as follows In Section 2the background about the energy consumption of bipedwalking robots is presented A QP problem for the energyoptimization is formulated in Section 3 Section 4 proposed aneurodynamics-based solution for the proposed QP problemto realize the energy optimization Section 5 presented thediagram of the neurodynamics-based energy optimizationcontrol system Simulation results are provided in Section 6followed by the conclusions in Section 7
2 Energy Consumption ofa Biped Walking Robot
The main idea is to optimize the energy consumption of abiped robot walking on horizontal ground For optimizationpurposes we consider the following assumptions
Assumption 1 We assume that the robot walks on practicablehorizontal terrain Therefore there are no forbidden zonesand every foot can be placed on the ground and providesupport to the robot
Assumption 2 We assume that all the motors in the bipedjoints have the same configurations The robotrsquos actuators arebased on DC electric motors (electrical motors cannot storethe gains of negative energy) [26 27]
Assumption 3 Consider a biped robot with point contactsbetween the ground and each foot Assume that each footcontacts the ground with Coulomb friction
The energy consumption of a biped robot is given by thesum of the energy consumed in every joint plus the energyconsumed by electronic equipment (computers drivers ana-log IO etc)The contribution of the latter is out of the scopeof this work
Mathematical Problems in Engineering 3
If a joint is driven by an electrical motor the consumedenergy is given by
119864 (119905) = int119906 (119905) 119894 (119905) 119889119905 (1)
where 119906(119905) is the voltage and 119894(119905) is the current through themotor As a normal practice in modeling DC motors forrobotic joints [27] the following electrical model of a motoris considered here
119906 (119905) minus 119896119864120596 (119905) = 119877119894 (119905) + 119871 119889119889119909119894 (119905) 1205911015840 (119905) = 119896119872119894 (119905) (2)
where 119877 represents the resistance of the motor and 120596(119905)denotes the rotation speed of the motor 119896119864 is the backelectromotive constant 119896119872 denotes the torque constant and1205911015840(119905) represents the motor torque As a first approximation tothe model we consider the rotor inductance 119871 to be nullNote that in standard international unit the value of 119896119872 is thevalue of 119896119864 that is 119896119872 (NmA) = 119896119864 (Vs)
Substituting (2) into (1) we obtain
119864 (119905) = int119906 (119905) 119894 (119905) 119889119905= int[120596 (119905) 1205911015840 (119905) + 1198771198962119872 [1205911015840 (119905)]2]119889119905
(3)
According to Assumption 2 the energy 119864119894119895 expended bythe motor of joint 119895 of leg 119894 during time 119879 can be given by
119864119894119895 (119905) = int1198790Δ [120596119894119895 (119905) 1205911015840119894119895 (119905)] + 1198771198951198962119872119895 [1205911015840119894119895 (119905)]2119889119905 (4)
where 119894 = 1 2 denotes the serial number of the legs and 119895 =1 119899 is the serial number of the jointsmotors in one legThe function Δ(sdot) is defined as
Δ (119910) = 119910 if 119910 gt 00 if 119910 le 0 (5)
Taking into consideration all joints in the biped robot thetotal energy consumption becomes
119864 = int1198790
2sum119894=1
119899sum119895=1
Δ [120596119894119895 (119905) 1205911015840119894119895 (119905)] + 1198771198951198962119872119895 [1205911015840119894119895 (119905)]2119889119905 (6)
Considering the practical differences between the rotationspeed and torques in joint 119895 and motor 119895 of leg 119894 joint gearratio 119873119895 and the joint gearrsquos mechanical efficiency 120578119895 areintroduced here Thus 120579119894119895 = 120596119894119895119873119895 and 120591119894119895 = 1205781198951198731198951205911015840119894119895 where120579119894119895 and 120591119894119895 represent the speed and torques in joint 119895 of leg 119894while 120596119894119895 and 1205911015840119894119895 represent those in motor 119895 of leg 119894Therefore(6) can be rewritten as
119864= int1198790
2sum119894=1
119899sum119895=1
Δ( 120579119894119895 (119905) 120591119894119895 (119905)120578119895 ) + 119877119895119896211987211989512057821198951198732119895 [120591119894119895 (119905)]2119889119905 (7)
The main goal of this work is to minimize the expendedenergy 119864 given by (7) Then the objective function can bepresented as
Φ = minint119879
0
2sum119894=1
119899sum119895=1
[Δ( 120579119894119895 (119905) 120591119894119895 (119905)120578119895 ) + 119877119895119896211987211989512057821198951198732119895 [120591119894119895 (119905)]2]119889119905 (8)
In the next section the energy-efficiency optimizationproblem will be formulated as a QP problem which can besolved online using neurodynamics
Remark 4 Load plays a crucial role in the application ofthe robot In [28] the combination of neural network (NN)proportional derivative (PD) and robust controller is used fordetermining the maximum load-carrying capacity (MLCC)of articulated robots subject to both actuator and end-effector deflection constraints The proposed technique isthen applied to articulated robots and MLCC is obtained fora given trajectory Literature [29] provides accurate estimatesof the robot load inertial parameters and accurate actuatortorques predictions both of which are essential for the accep-tance of the results in an industrial environment The keyelement to the success of this work is the comprehensiveness
of the applied model which includes besides the dynamicsresulting from the robot load and motor inertia the couplingbetween the actuator torques the mechanical losses in themotors and the efficiency of the transmissions
From the literatures we know that load is not the onlyfactor that demands the torque In this work the weight ofthe robot is considered as the load
3 Formulate a QP Problem forEnergy-Efficient Biped Robots
The objective function shown in (8) can be expressed as thefollowing optimization problemΦ = min [12120591119879119876120591 +max (119888119879120591 0)] (9)
4 Mathematical Problems in Engineering
where
119876 = 2119877119896211987212057821198732 1198682119899times2119899119888 = [ 12057911120578 1205791119899120578 12057921120578 1205792119899120578 ]119879
(10)
120591 = [12059111 1205911119899 12059121 1205912119899]119879 119883 = max(119880 119881) denotesthat the elements 119909119894119895 in the matrix 119883 are equal to the biggerelements between 119906119894119895 in the matrix119880 and V119894119895 in the matrix 119881The problem shown in (9) should guarantee three necessaryconstraints
(i) The force-moment equilibrium equation of bipedrobots
(ii) Frictions applied by each leg on the ground to holdthe biped robot without slippage and tipping over
(iii) Physical limits of the motors
Let us beginwith the force-moment equilibrium equationfor the whole biped system which can be written as119860119865 = 119882 (11)
where 119865 = [1198911198791 1198911198792 ]119879 is a vector of the ground reaction forcesacting on the left foot and the right foot
119860 = [119868119899times119899 119868119899times1198991198611 1198612 ]119861119894 = [[[[
0 minus119861119875119894119865119911 119861119875119894119865119910119861119875119894119865119911 0 minus119861119875119894119865119909minus119861119875119894119865119910 119861119875119894119865119909 0
]]]] (12)
where 119861119875119894119865 = [119861119875119894119865119909 119861119875119894119865119910 119861119875119894119865119911]119879 denotes the posi-tion of leg 119894 referring to basic coordinate frame 119882 =[119865119909 119865119910 119865119911119872119909119872119910119872119911]119879 contains the forces and momentsacting on the robotrsquos center of gravity (COG)
Biped dynamics provide the relevance between groundreaction forces acting on the feet and the joint torques of thelegs Consider the 119894th leg of a biped robot the dynamics of thesystem can be expressed in the vector-matrix form as
120591119894 + 119869119879119894 (120579119894) 119891119894 = 119863119894 (120579119894) 120579119894 + ℎ119894 (120579119894 120579119894) + 119892119894 (120579119894) (13)
where 120579119894 = [1205791198941 120579119894119899]119879 is a 2119899 times 1 joint position vector ofthe 119894th leg 119894 = 1 2 for the biped robot 119863119894 is the 2119899 times 2119899inertia matrix of the leg ℎ119894 is a 2119899 times 1 vector of centrifugaland Coriolis terms 119892119894 is a 2119899 times 1 vector of gravity terms 120591119894is the 2119899 times 1 vector of joint torques 119891119894 is the 2119899 times 1 vectorof ground reaction forces of the 119894th leg and 119869119894 is the Jacobianmatrix from the joints of the 119894th leg to the basic coordinatespace Equation (13) can be rewritten as
119891119894 = 119869minus119879119894 (120579119894) [119863119894 (120579119894) 120579119894 + ℎ119894 (120579119894 120579119894) + 119892119894 (120579119894) minus 120591119894] (14)
Replacing 119891119894 in (11) with (14) the force-moment equilibriumequation (11) can be written as
119860120591 = (15)
where 119860 is an equilibrium matrix for the torque and
119860 = 119860[119869minus1198791 (1205791) 00 119869minus1198792 (1205792)] = 119860[[
1198631 (1205791) 1205791 + ℎ1 (1205791 1205791) + 1198921 (1205791)1198632 (1205792) 1205792 + ℎ2 (1205792 1205792) + 1198922 (1205792)]] minus119882(16)
Equation (15) is the first constraint describing the force-moment equilibrium equation of biped robots
On the other hand considering the friction applied by theleg on the ground the second constraint can be written as
119860ueq120591 le 119861ueq (17)
where 119860ueq isin 119877119898 is the coefficient matrix of the frictionconstraint for the feet
119861ueq = 119860ueq [[1198631 (1205791) 1205791 + ℎ1 (1205791 1205791) + 1198921 (1205791)1198632 (1205792) 1205792 + ℎ2 (1205792 1205792) + 1198922 (1205792)]]
119860ueq = [120583 00 120583] sdot [119869minus1198791 (1205791) 00 119869minus1198792 (1205792)] (18)
where 120583 is the Coulomb friction coefficient between the feetand the touched ground
The third constraint is about the physical limits of themotors which has the form of 120585minus le 120591 le 120585+ 120585minus and 120585+ areknown torque vectors according to the motors in the robot120585minus isin 1198772119899 and 120585+ isin 1198772119899
From the above the energy-efficiency optimization prob-lem can be formulated as the following QP problem
min 12120591119879119876120591 +max (119888119879120591 0) (19)
st 119860120591 = (20)119860ueq120591 le 119861ueq (21)120585minus le 120591 le 120585+ (22)
where the definitions of the symbols can be found in (9) (15)and (17)
Mathematical Problems in Engineering 5
As we can see now the strategy for minimizing theenergy consumption of biped robots is finally formulated as aconstrained QP problem (see (19)ndash(22)) In the next sectionwe are going to solve this QP problem using neurodynamics
4 Solve the QP Problem forEnergy Optimization
First of all the QP problem described in (19)ndash(22) needs tobe converted to a LVI problem For this purpose 120594 and 120573are defined as the dual decision vectors corresponding to theequality constraint (20) and the inequality constraint (21)respectively As a result the primal-dual decision vector119910 andits upperlower bounds 119910plusmn are defined as follows
119910 fl [[[120591120594120573]]]
119910+ fl [[[[120585++120594++120594+]]]]
119910minus fl [[[[120585minusminus120594+minus120594+]]]] isin 119877
2119899+119897+119898(23)
where elements 120594+119894 ≫ 0 in 120594+ are defined sufficientlypositive to represent infinity for any 119894 for the convenience ofsimulation and hardware implementation of the operationThe convex set Ω made by primal-dual decision vector 119910 ispresented as Ω = 119910minus le 119910 le 119910+ Then the QP problem in(19)ndash(22) is equivalent to the following LVI problem
(119910 minus 119910lowast)119879 (119872119910lowast + 119901) ge 0 forall119910 isin Ω (24)
That is to say we need to find a vector 119910lowast isin Ω = 119910 | 119910minus le119910 le 119910+with a coefficient matrix119872 and a vector 119901 as follows119872 fl
[[[[119876 minus119860119879 119860119879ueq119860 0 0minus119860ueq 0 0
]]]] isin 119877(2119899+119897+119898)times(2119899+119897+119898)
119901 fl [[[[119888minus119861ueq]]]] isin 119877
(2119899+119897+119898)(25)
As a summary of this step a theorem and the correspondingproof are given below
Theorem 5 (see [21] (LVI formulation)) The QP problem in(19)ndash(22) is equivalent to the following LVI problem that isto find a vector 119910lowast isin Ω = 119910 | 119910minus le 119910 le 119910+ such that(119910 minus 119910lowast)119879(119872119910lowast + 119901) ge 0 forall119910 isin Ω where coefficients 119910plusmn119872and 119901 are defined in (24) and (23) respectively
Proof From [21] we know that the Lagrangian dual prob-lem of the QP problem in (19)ndash(22) is to maximizeinf120591isin1198772119899119871(120591 120594 Vminus V+) over 120594 Vminus ge 0 and V+ ge 0 where119871 (120591 120594 Vminus V+) = 2119899sum
119894=1
[121205911198942119876119894 + 119888119894120591119894 + 120594119894 (minus119860 119894120591119894 + 119894)+ 120573119894 (119860ueq 119894120591119894 minus 119861ueq 119894) + V119894minus (minus120591119894 + 120585119894minus)+ V119894+ (120591119894 minus 120585119894+)]
(26)
Note that function 119871(120591 120594 Vminus V+) is convex with given 120594 isin119877119897 Vminus isin 1198772119899 and V+ isin 1198772119899 Therefore the necessary andsufficient condition for a minimum is2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894120594119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0 (27)
Thus the dual problem of (19)ndash(22) can be derived as
maximize2119899sum119894=1
[121205911198942119876119894 + 119888119894120591119894 + 120594119894 (minus119860 119894120591119894 + 119894) + 120573119894 (119860ueq 119894120591119894 minus 119861ueq 119894) + V119894minus (minus120591119894 + 120585119894minus) + V119894+ (120591119894 minus 120585119894+)]subject to
2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894119910119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0120594119894 unrestricted V119894minus ge 0 V119894+ ge 0(28)
Multiplying both sides of (27) by 120591 we haveminus 2119899sum119894=1
1205911198942119876119894= 2119899sum119894=1
[120591119894119888119894 minus 120591119894119860 119894120594119894 + 120591119894119860ueq119894120573119894 + 120591119894 (minusV119894minus + V119894+)] (29)
Then the dual form can be rewritten as
maximize2119899sum119894=1
[minus121205911198942119876119894 + 119894120594119894 minus 119861ueq 119894120573119894 + 120585119894minusV119894minus minus 120585119894+V119894+]subject to
2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894120594119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0
6 Mathematical Problems in Engineering
120594119894 unrestricted V119894minus ge 0 V119894+ ge 0(30)
To obtain the optimum (120591lowast 120594lowast Vminuslowast V+lowast) of the primal prob-lem (see (19)ndash(22)) and its dual problem (see (30)) thenecessary and sufficient conditions are as follows
Primal feasibility
2119899sum119894=1
(119860 119894120591119894lowast minus 119894) = 0 (31)
2119899sum119894=1
(minus119860ueq 119894120591119894lowast + 119861ueq 119894) ge 02119899sum119894=1
120585119894minus le 2119899sum119894=1
120591119894lowast le 2119899sum119894=1
120585119894+ (32)
Dual feasibility
2119899sum119894=1
(119876119894120591119894 + 119888119894 minus 119860 119894119910119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+) = 0120594119894 unrestricted 120573119894 ge 0 V119894minus ge 0 V119894+ ge 0 (33)
Complementarity
2119899sum119894=1
120573119894lowast (minus119860ueq 119894120591119894lowast + 119861ueq 119894) = 0 (34)
2119899sum119894=1
V119894minuslowast (minus120591119894lowast + 120585119894minus) = 0 (35)
2119899sum119894=1
V119894+lowast (120591119894lowast minus 120585119894+) = 0 (36)
To simplify the above necessary and sufficient conditionsby defining Vlowast119894 = Vminuslowast119894 minus V+lowast119894 and considering (35)-(36) dualfeasibility constraint (33) becomes
2119899sum119894=1
(119876119894120591119894lowast + 119888119894 minus 119860 119894120594119894lowast + 119860ueq 119894120573119894lowast)= 2119899sum119894=1
V119894lowast
le 0 120591lowast119894 = 120585+119894= 0 120591lowast119894 isin (120585minus119894 120585+119894 )ge 0 120591lowast119894 = 120585minus119894 (37)
which is equal to the following LVI problem to find anoptimum 120591lowast isin Ω1 such that
2119899sum119894=1
(120591119894 minus 120591119894lowast) (119876119894120591119894lowast + 119888119894 minus 119860 119894120594119894lowast + 119860ueq 119894120573119894lowast) ge 0forall120591 isin Ω1 (38)
whereΩ1 = 120591 | 120585minus le 120591lowast le 120585+
In addition by defining Ω2 fl 120594 | 120594 isin 119877119897 we have thefollowing LVI for the equality constraint (31) to find 120594lowast isin Ω2such that
2119899sum119894=1
(120594119894 minus 120594119894lowast) (119860 119894120591119894lowast minus 119894) ge 0 forall120594 isin Ω2 (39)
Similarly by defining Ω3 = 120573 | 120573 isin 119877119898 we havethe following LVI for the inequality constraint (32) and theequality constraint (34) to find 120573lowast isin Ω3 such that2119899sum119894=1
(120573119894 minus 120573119894lowast) (minus119860ueq 119894120591119894lowast + 119861ueq 119894) ge 0 forall120573 isin Ω3 (40)
By taking the Cartesian product of the three sets Ω1Ω2 and Ω3 defined above we formulate the convex set Ωpresented in (24) as follows
Ω = Ω1 times Ω2 times Ω3 = 119910 = (120591119879 120594119879 120573119879)119879isin 119877(2119899+119897+119898) | 120585minus le 120591lowast le 120585+ 120594 unrestricted 120573 ge 0= 119910 =
[[[120591120594120573]]] isin 119877(2119899+119897+119898) |
[[[[120585minusminus120594+minus120594+]]]] le[[[120591120594120573]]]
le [[[[120585+120594+120594+]]]] = 119910 isin 119877
(2119899+119897+119898) | 119910minus le 119910 le 119910+ (41)
In consequence LVIs (38)ndash(40) can be combined into an LVIin the matrix form that is to find an optimum 119910lowast isin Ω suchthat 119910 = (120591119879 120594119879 120573119879)119879 isin Ω and([[[120591120594120573]]] minus [[[
120591lowast120594lowast120573lowast]]])119879
sdot ([[[[119876 minus119860119879 119860119879ueq119860 0 0minus119860ueq 0 0
]]]][[[120591lowast120594lowast120573lowast]]] +
[[[[119888minus119861ueq]]]])
ge 0 forall[[[120591120594120573]]] isin Ω
(42)
Contrasting the definitions of 119910plusmn in (23) and119872 and 119901 in (25)the above LVIs (see (42)) are exactly in the compact form (see(25)) as the equivalence ofQPproblem in (19)ndash(22)Theproofis then completed
On the other hand from [20] it is known that LVI in(25) is equivalent to the following system of piecewise linearequations 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 = 0 (43)
Mathematical Problems in Engineering 7
where 119875Ω(sdot) is a piecewise linear projection operator with the119894th projection element of 119875Ω(119910) = [119875Ω(1199101) 119875Ω(1199102119899+119897+119898)]119879being defined as
119875Ω (119910119894) = 119910minus119894 if 119910119894 lt 119910minus119894119910119894 if 119910minus119894 le 119910119894 le 119910+119894 119910+119894 if 119910119894 gt 119910+119894 forall119894 isin 1 2119899 + 119897 + 119898
(44)
To solve linear projection equation (43) the dual dynamicalsystem design approach presented in [20] is adopted tobuild a dynamical system Considering the asymmetric 119872a primal-dual neural network is developed as follows to solve(43) 119910 = 120574 (119868 +119872119879) 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (45)
where 120574 gt 0 is a design parameter used to scale theconvergence rate of the system The convergence rate isimproved when the value of 120574 is increased Furthermore byreplacing 120574(119868+119872119879)with 120572 the dynamical system (45) can berewritten as follows119910 = 120572 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (46)
where 120572 is a positive design parameter for the convergencerate of the PDNN (see (46)) About the convergence analysisof the above-mentioned primal-dual dynamical solver thereis a theorem presented as follows
Theorem 6 (see [22]) Starting from any initial state thestate vector 119910(119905) of primal-dual dynamical system (45) isconvergent to an equilibrium point 119910lowast of which the first 2119899elements constitute the optimal solution 120591lowast to the quadraticprogramming problem in (19)ndash(22) Moreover the exponentialconvergence can be achieved if there exists a constant 120588 gt 0such that 1003817100381710038171003817119910 minus 119875Ω (119910 minus (119872119910 + 119901))100381710038171003817100381722 ge 120588 1003817100381710038171003817119910 minus 119910lowast100381710038171003817100381722 (47)
Remark 7 As a primal-dual dynamical solver primal-dualneural networks can efficiently generate exact optimal solu-tions [21] Furthermore compared to dual neural networksthe LVI- (linear variational inequality-) based primal-dualneural networks do not entail any matrix inversion onlineso that they can reduce the computational time greatly [20]Therefore a LVI-based primal-dual neural network is appliedto perform theminimization of the energy consumptionwithequality and inequality constraints for biped robots in thiswork
5 Neurodynamics-Based EnergyOptimization Control
Over the past two decades much progress has been madein the control of robot systems based on various controltechniques In [30] two novel robust adaptive PID control
schemes are proposed to solve the strong nonlinearity andcoupling problems in robot manipulator control In [31] asupport vector regression-based control system is proposedto learn the external disturbances and increase the zero-moment-point stability margin of humanoid robots In [32]a kinematics open-loop control system of hexapod robot withan embedded digital signal controller is proposed In [33] anopen-loop controller is implemented on field programmablegate array (FPGA) of the robot Experimental results revealthe viability of the proposed controller
On the other hand many mature techniques have beenused to track the planned trajectories with a certain controlstrategy In [34] a trajectory generator and a joint trajectorytracking controller are designed The proposed combinationis successfully implemented and the robot is able to walkat 011ms Literature [35] considers the problem of jointtrajectory control with oscillations cancelling for planarmultilink flexible manipulators A feed-forward torque isdesigned to preset the elastic coordinates of the system sothat the controller is able to drive the arm along the desiredtrajectory In [36] in order to reduce gait planning andto get a good tracking performance master-slaver dual-legcoordination control was proposed for the biped robot withheterogeneous legs In [37] an open-closed-loop iterativelearning control algorithm with angle correction term isproposed which uses the error signal and the deviation oftwo adjacent error signals to adjust itself
In this work the proposed neurodynamics-basedmethodis an open-loop controller As shown in Figure 1 controlmethod based on energy-efficiency optimization is proposedto obtain the trade-off between the force-moment equilib-rium and energy efficiency for biped walking by minimizingthe energy-related cost function while guaranteeing physicalconstraints There are two parts in the control system QPproblem for energy optimization and a LVI-based primal-dual neural network for solving the QP problemThe controlobject of the proposedmethod is to follow the planned trajec-tories for the biped joints using optimal joint torques deducedby the proposed controller The inputs of the controllerinclude the planned trajectories for the biped joints theforce-moment equilibrium equation of biped robot frictioncoefficient between the ground and the robot and physicalparameters of the motors equipped on the robotThe outputsof the controller are the optimal joint torques for the bipedjoints which are deduced using a LVI-based primal-dualneural network
Firstly the strategy for optimizing the energy efficiencyis formulated as a constrained QP problem Three importantphysical constraints for the biped system are formulated inthis QP problem for energy optimization of biped walkingrobots
Secondly a neurodynamics-based solver is presented tosolve the proposed constrained optimization problem
Thirdly joint trajectories are planned for the biped robotThe planned trajectories provide parameters for the force-moment equilibrium equation of biped robot which is oneof the constraints of the energy optimization QP problem Sothe biped robot is able to make the step and does not fall
8 Mathematical Problems in Engineering
QP problem for energy optimization of biped robots
(see equations (19)ndash(22))
LVI-based primal-dual neural network (PDNN) (see equation (46))
Biped robot
Q
c
p
y
+
+
M
Bipedwalking
Gaitplanning
plusmn
plusmn
PΩ(middot)
I minus M
y
lowast
int
minus le le +
AOK le BuK
st A = W
GCH (12)TQ + GR(cT 0)
minus
minus
[c minusW BOK]T
sum
sum
[[[[[
Q minusAT ATOK
A 0 0
minusAOK 0 0
]]]]]
Figure 1 Neurodynamics-based energy optimization strategy for biped robots
B y
x
z
1
2
3
4
5
6
LNB
LH
LMB
Figure 2 Simplified model of the biped robot
Table 1 Main parameters of the biped robot
Link Length (m) Mass (kg) Inertia moment (kgsdotm2)Torso 0175 1060 001623Thigh 0130 0075 (times2) 000037 (times2)Shank 0130 0075 (times2) 000037 (times2)Foot 0020 0060 (times2) 000004 (times2)6 Simulation Research
To verify the effectiveness of the proposed energy-efficiencycontrol method some simulations are implemented in thissection Matlab is used to model the biped robot and thecontroller
61 Structure and Parameters of the Biped Robot Considera planar biped robot with 6 degrees of freedom shown inFigure 2 The robot consists of one torso and two legs Themain parameters of the biped robot can be found in Table 1
Typical gait is planned for this simulated biped robot towalk on the horizontal ground In this work it is assumed thatthe torso of the biped robotmoves at a constant velocitywith aconstant heightTheCOGof the simplifiedmodel is located atthe geometric center of the torsoThe basic coordinate frame
with its origin at the COG is defined as a body-fixed frameThe whole walking period of the biped robot is considered tobe composed of a single-support phase and an instantaneousdouble-support phase The supporting foot is assumed toremain in full contact with the ground during the single-support phase The trajectories of the ankles and the hips aregiven as follows119910119886 (119896) = 119886120587 2120587119873 + 1119896 minus sin( 2120587119873 + 1119896)
119911119886 (119896) = 119889120587 1 minus cos( 2120587119873 + 1119896)119910ℎ (119896) = 12119910119886 (119896) + 1198862119911ℎ (119896) = 12119911119886 (119896) + 119871 th + 119871 sh minus 1198892 (48)
where 119910ℎ(119896) and 119911ℎ(119896) denote the position of the hip and119910119886(119896) and 119911119886(119896) denote the position of the swinging anklejoint at the 119896th sample 119886 is the walking step length and 119889is the height of swinging ankle 119873 + 1 is the total samplingnumber in a walking cycle 119879 119871 th and 119871 sh are the lengths oflower limbs Here 119889 = 002m and 119879 = 1 s62 Parameters for the QP Problem and the Neurodynamics-Based Solver For the parameters of the constrained QPproblem in (19)ndash(22) the parameters of the motors aredetermined by the motors that are equipped in the robotHere we take a set of typicalmotor parameters as an exampleThe electric resistance of the motor 119877 = 917 (Ω) torqueconstant 119896119872 = 168 times 10minus3 (NmA) gear reduction rate119873 = 200 and the joint gearrsquos mechanical efficiency 120578 = 07Submitting all the above-mentioned parameters to (9) wehave 119876 = 3321198686times6 and 119888 = 143[ 12057911 12057912 12057913 12057921 12057922 12057923]119879where 120579119894 = [ 1205791198941 1205791198942 1205791198943]119879 is the joint velocity vector of the119894th leg Here the joint velocity can be calculated using thegait planned in Section 61 Consider the 119894th leg of a bipedrobot 120579119894(119896 + 1) = [120579119894(119896 + 1) minus 120579119894(119896)]Δ119905 119894 = 1 2 where120579119894(119896 + 1) denotes the joint velocity at the (119896 + 1)th sampleand Δ119905 is the sampling interval The smaller the value of Δ119905is the more accurate but the more computationally intensivethe joint velocity is [38]
Mathematical Problems in Engineering 9
Input layer Hidden layer Output layer
u8 = 1
u1 = 1
u7 = 7
uM = 7
11
12
ML
11
12
LJ
S( Msumm=1
m1um)
S( Msumm=1
m2um)
S( Msumm=1
mLum)
J =Lsuml=1
lJ middot1
(1 + eminussum=1 u)
1 =Lsuml=1
l1 middot1
(1 + eminussum=1 u)
Figure 3 Structure of the three-layered NN
For the constraint condition of force-moment equilib-rium equation the Coulomb friction coefficient depends onthe ground environmentHerewe take120583 = 06 as an exampleThe inertia matrix of the leg 119863119894 the centrifugal and Coriolisterms ℎ119894 and the gravity terms 119892119894 in the dynamic equationcan be calculated using the method shown in [39]
Considering the physical limits of the motors we have120585+ = minus120585minus = [12 12]119879For the neurodynamics-based solver the positive design
parameter for the convergence rate of the PDNN is 120572 = 01which is determined using the trial-and-error method
63 Biped Walking via Different Controllers The proposedcontrol method is tested on the control of the biped robotmentioned above by simulation experiments The perfor-mances of the proposed NEO are compared with those of theSVM control methods [40 41] and NN control methods
For the SVM controller the parameters include a penaltycoefficient 119862 = 1000 degree of the polynomial kernels 119902 = 2width of the RBF kernels 120590 = 015 and mixed coefficientof the mixed kernels 119886 = 095 When training the bipeddynamic we sample the joint variables in the period of 119879 =1 s and let the sampling interval be Δ119905 = 0005 s That isto say there are 200 sampling points in a single walkingperiod the desired sample set satisfying the ZMP criterionis (Θ1 1205911) (Θ200 120591200)
On the other side for comparison with the proposedNEO a three-layered backpropagation (BP) NN is built tocontrol the biped robot Details of the NN are introduced asfollows
Layer 1 (Input Layer) In this layer the input signal is directlytransferred to the next layer that is
119874(1)119898 = 119906119898 (49)
where 119906119898 = Θ = [1205791 1205792 1205796 1205791 1205792 1205796]119879 and 119898 =1 119872 (119872 = 12) is the input variable 119874(1)119898 is the outputof the input layer
Layer 2 (Hidden Layer) Each node in the hidden layerperforms a transfer operation using a Sigmoid function thatis
119874(2)119897 = 119878( 119872sum119898=1
120575119898119897119906119898) = 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (50)
where 119874(2)119897 is the output of the hidden layer 119878(sdot) is a Sigmoidfunction 119897 = 1 119871 is the index of the hidden unitsThe number of the hidden units is designed as 119871 = 20here using the trial-and-error method 120575119898119897 is the connectionweight between the input layer and the hidden layer Theinitial values of the connection weights can be selectedrandomly and different initial values could lead to differentperformance of the NN
Layer 3 (Output Layer) This layer performs the calculationfor the output of the whole network
120591119895 = 119871sum119897=1
120573119895119897 sdot 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (51)
where 120591119895 is the control torque for the 119895th biped joint 119895 =1 119869 (119869 = 6) 120573119895119897 is the connection weight between thehidden layer and the output layerThe initial values of 120573119895119897 canbe selected randomly
By using BP algorithm the NN is trained offline with the200 desired samples for 100 times The structure of the NN isshown in Figure 3
The proposed control method and the above-mentionedtwo intelligent methods are adopted to control the simulatedbiped robot respectively As we can see from Figures 4-5all the three methods can realize the planned biped walking
10 Mathematical Problems in Engineering
minus005
0
005
01
015
02
025
03
035
04
045z
(m)
015 02 025 03 035 04 045 0501x (m)
(a)
015 02 025 03 035 04 045 0501x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 0501x (m)
(c)
Figure 4 Biped walking using different controllers when the step length is 018m (a) SVM (b) NN and (c) the proposed NEO
Energy consumption trajectories are shown in Figures 6-7As shown in the figures the proposed NEO needs less energythan the other methods due to the proposed energy-basedoptimal control For example when the energy consumptionof all the joints is 15979 J for the proposed NEO the energyconsumption is 40910 J for the NN and 31168 J for the SVM(see Table 2) Furthermore the proposed NEO always needsless energy than the other two methods when different bipedmotions are considered (Motion 1 the step length is 018mMotion 2 the step length is 020m) At the same time theSVM controller exhibits greater energy efficiency comparedwith the NN controller The possible cause is that the SVM ismore efficient in learning the energy-efficient controller usinglimited samples
Remark 8 In the simulation section the robotrsquos joint trajec-tories are predefinedThis paper makes contribution by opti-mizing the joint torques to decrease the energy consumptionwithout changing the biped gaits
Table 2 Energy consumption comparisons with other methods
Method Step length (m) E (J)NN
01840910
SVM 31168The proposed NEO 15979NN
02083164
SVM 57229The proposed NEO 31400
Joint torques for different controllers when the step lengthis 020m are shown in Figures 8ndash13 As shown in thefigures the proposed NEO strategy exhibits smaller drivingtorques compared with the NN method and SVM methodIt is because we deduce the optimal joint torque for thebiped robot according to the proposed energy optimizationproblem As a result torque costs of the biped joints are
Mathematical Problems in Engineering 11
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(a)
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 05 055 0601x (m)
(c)
Figure 5 Biped walking using different controllers when the step length is 020m (a) SVM (b) NN and (c) the proposed NEO
NNSVMThe proposed NEO
0
100
200
300
400
500
600
700
800
900
Ener
gy co
nsum
ptio
n (J
)
02 04 06 08 10Time (s)
Figure 6 Energy consumption of the robot joints for different controllers when the step length is 018m
12 Mathematical Problems in Engineering
NNSVMThe proposed NEO
02 04 06 08 10Time (s)
0
200
400
600
800
1000
1200
1400
1600
1800
Ener
gy co
nsum
ptio
n (J
)
Figure 7 Energy consumption of the robot joints for differentcontrollers when the step length is 020m
50 100 150 2000Serial number of the samples
5
6
7
8
9
10
11
12
13
14
15
Join
t tor
que f
or 1
(Nm
)
NNSVMThe proposed NEO
Figure 8 Joint torque for 1205791 deduced by different control methods
reduced remarkably This contributes to the effectivenessof the proposed NEO strategy in terms of reducing theenergy consumption of biped robots At the same time theproposed NEO strategy minimizes the energy consumptionand guarantees three necessary constraints simultaneouslyTherefore the force-moment equilibrium equation of bipedrobots is guaranteed and the biped robot does not fall
On the other hand the SVM controller exhibits greaterenergy efficiency (realize the same motion with smaller driv-ing torques) compared with the NN controller The possiblecause is that the number of the learning samples for the NN
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
3
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 2
(Nm
)Figure 9 Joint torque for 1205792 deduced by different control methods
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 3
(Nm
)
Figure 10 Joint torque for 1205793 deduced by different control methods
controllers is not large enough in this work Conventionalmachine learning methods such as NN use empirical riskminimization (ERM) based on infinite samples which is dis-advantageous to the learning control based on small samplesizes for biped robots The SVM is direct implementationof the structural risk minimization (SRM) principle Thisdifference makes SVM more efficient in resolving the small-sample-sizes learning problems
7 Conclusions
To build a more practical objective function for the energyoptimization of biped robots three important constraints are
Mathematical Problems in Engineering 13
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus12
minus10
minus8
minus6
minus4
minus2
0
Join
t tor
que f
or 4
(Nm
)
Figure 11 Joint torque for 1205794 deduced by different control methods
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus10
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Join
t tor
que f
or 5
(Nm
)
Figure 12 Joint torque for 1205795 deduced by different control methods
incorporated into the optimal controller for biped robotsSimulation results demonstrate that the proposed NEO strat-egy effectively decreases the energy consumption of bipedwalking robot In addition the proposed strategy can guaran-tee the force-moment equilibrium equation and the physicallimits of the motors Coulomb friction is applied between theleg and the ground by setting a friction coefficient The bipedrobot can provide optimal joint torques without slippage ortipping over
It is worth noting that most of the existing algorithmsrealize the energy minimization via optimizing gait param-eters However gait parameters such as foot trajectoriesand the trajectories of the COG are not the only aspect
NNSVMThe proposed NEO
1
2
3
4
5
6
7
8
9
10
Join
t tor
que f
or 6
(Nm
)
50 100 150 2000Serial number of the samples
Figure 13 Joint torque for 1205796 deduced by different control methods
to be concerned Other factors such as the forces andmoments acting on the biped robot can also impose onenergy consumption of the biped robot to a large extent Forexample people walking in the mud or in a gale usually feelmore tiredTherefore when the foot trajectories and theCOGtrajectories are determined optimizing the torques of eachjoint is significant for the energy optimization of the wholebiped system This point is verified by simulations and theresults of this work are significant
In this work the proposed neurodynamics-basedmethodis an open-loop controller In the simulation experiments wedo not introduce any error accumulation during the bipedwalking So the simulated robot is able to follow the plannedtrajectories and does not fall However for a real robotsystem there must be error accumulation introduced by themechanical devices In this situation the biped robot tends todeviate from the reference trajectory if there is no feedbackand correction for error compensating Consequently futureworks will include the design of closed-loop controllerswhich are more suitable for real robot systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (Projects 61403264 and 61305098) andby the Natural Science Foundation of Guangdong Province(Project 2016A030310018) Grateful thanks go to Dr Ye Xian-Ming who gives considerable help by means of environmentsupport
14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
If a joint is driven by an electrical motor the consumedenergy is given by
119864 (119905) = int119906 (119905) 119894 (119905) 119889119905 (1)
where 119906(119905) is the voltage and 119894(119905) is the current through themotor As a normal practice in modeling DC motors forrobotic joints [27] the following electrical model of a motoris considered here
119906 (119905) minus 119896119864120596 (119905) = 119877119894 (119905) + 119871 119889119889119909119894 (119905) 1205911015840 (119905) = 119896119872119894 (119905) (2)
where 119877 represents the resistance of the motor and 120596(119905)denotes the rotation speed of the motor 119896119864 is the backelectromotive constant 119896119872 denotes the torque constant and1205911015840(119905) represents the motor torque As a first approximation tothe model we consider the rotor inductance 119871 to be nullNote that in standard international unit the value of 119896119872 is thevalue of 119896119864 that is 119896119872 (NmA) = 119896119864 (Vs)
Substituting (2) into (1) we obtain
119864 (119905) = int119906 (119905) 119894 (119905) 119889119905= int[120596 (119905) 1205911015840 (119905) + 1198771198962119872 [1205911015840 (119905)]2]119889119905
(3)
According to Assumption 2 the energy 119864119894119895 expended bythe motor of joint 119895 of leg 119894 during time 119879 can be given by
119864119894119895 (119905) = int1198790Δ [120596119894119895 (119905) 1205911015840119894119895 (119905)] + 1198771198951198962119872119895 [1205911015840119894119895 (119905)]2119889119905 (4)
where 119894 = 1 2 denotes the serial number of the legs and 119895 =1 119899 is the serial number of the jointsmotors in one legThe function Δ(sdot) is defined as
Δ (119910) = 119910 if 119910 gt 00 if 119910 le 0 (5)
Taking into consideration all joints in the biped robot thetotal energy consumption becomes
119864 = int1198790
2sum119894=1
119899sum119895=1
Δ [120596119894119895 (119905) 1205911015840119894119895 (119905)] + 1198771198951198962119872119895 [1205911015840119894119895 (119905)]2119889119905 (6)
Considering the practical differences between the rotationspeed and torques in joint 119895 and motor 119895 of leg 119894 joint gearratio 119873119895 and the joint gearrsquos mechanical efficiency 120578119895 areintroduced here Thus 120579119894119895 = 120596119894119895119873119895 and 120591119894119895 = 1205781198951198731198951205911015840119894119895 where120579119894119895 and 120591119894119895 represent the speed and torques in joint 119895 of leg 119894while 120596119894119895 and 1205911015840119894119895 represent those in motor 119895 of leg 119894Therefore(6) can be rewritten as
119864= int1198790
2sum119894=1
119899sum119895=1
Δ( 120579119894119895 (119905) 120591119894119895 (119905)120578119895 ) + 119877119895119896211987211989512057821198951198732119895 [120591119894119895 (119905)]2119889119905 (7)
The main goal of this work is to minimize the expendedenergy 119864 given by (7) Then the objective function can bepresented as
Φ = minint119879
0
2sum119894=1
119899sum119895=1
[Δ( 120579119894119895 (119905) 120591119894119895 (119905)120578119895 ) + 119877119895119896211987211989512057821198951198732119895 [120591119894119895 (119905)]2]119889119905 (8)
In the next section the energy-efficiency optimizationproblem will be formulated as a QP problem which can besolved online using neurodynamics
Remark 4 Load plays a crucial role in the application ofthe robot In [28] the combination of neural network (NN)proportional derivative (PD) and robust controller is used fordetermining the maximum load-carrying capacity (MLCC)of articulated robots subject to both actuator and end-effector deflection constraints The proposed technique isthen applied to articulated robots and MLCC is obtained fora given trajectory Literature [29] provides accurate estimatesof the robot load inertial parameters and accurate actuatortorques predictions both of which are essential for the accep-tance of the results in an industrial environment The keyelement to the success of this work is the comprehensiveness
of the applied model which includes besides the dynamicsresulting from the robot load and motor inertia the couplingbetween the actuator torques the mechanical losses in themotors and the efficiency of the transmissions
From the literatures we know that load is not the onlyfactor that demands the torque In this work the weight ofthe robot is considered as the load
3 Formulate a QP Problem forEnergy-Efficient Biped Robots
The objective function shown in (8) can be expressed as thefollowing optimization problemΦ = min [12120591119879119876120591 +max (119888119879120591 0)] (9)
4 Mathematical Problems in Engineering
where
119876 = 2119877119896211987212057821198732 1198682119899times2119899119888 = [ 12057911120578 1205791119899120578 12057921120578 1205792119899120578 ]119879
(10)
120591 = [12059111 1205911119899 12059121 1205912119899]119879 119883 = max(119880 119881) denotesthat the elements 119909119894119895 in the matrix 119883 are equal to the biggerelements between 119906119894119895 in the matrix119880 and V119894119895 in the matrix 119881The problem shown in (9) should guarantee three necessaryconstraints
(i) The force-moment equilibrium equation of bipedrobots
(ii) Frictions applied by each leg on the ground to holdthe biped robot without slippage and tipping over
(iii) Physical limits of the motors
Let us beginwith the force-moment equilibrium equationfor the whole biped system which can be written as119860119865 = 119882 (11)
where 119865 = [1198911198791 1198911198792 ]119879 is a vector of the ground reaction forcesacting on the left foot and the right foot
119860 = [119868119899times119899 119868119899times1198991198611 1198612 ]119861119894 = [[[[
0 minus119861119875119894119865119911 119861119875119894119865119910119861119875119894119865119911 0 minus119861119875119894119865119909minus119861119875119894119865119910 119861119875119894119865119909 0
]]]] (12)
where 119861119875119894119865 = [119861119875119894119865119909 119861119875119894119865119910 119861119875119894119865119911]119879 denotes the posi-tion of leg 119894 referring to basic coordinate frame 119882 =[119865119909 119865119910 119865119911119872119909119872119910119872119911]119879 contains the forces and momentsacting on the robotrsquos center of gravity (COG)
Biped dynamics provide the relevance between groundreaction forces acting on the feet and the joint torques of thelegs Consider the 119894th leg of a biped robot the dynamics of thesystem can be expressed in the vector-matrix form as
120591119894 + 119869119879119894 (120579119894) 119891119894 = 119863119894 (120579119894) 120579119894 + ℎ119894 (120579119894 120579119894) + 119892119894 (120579119894) (13)
where 120579119894 = [1205791198941 120579119894119899]119879 is a 2119899 times 1 joint position vector ofthe 119894th leg 119894 = 1 2 for the biped robot 119863119894 is the 2119899 times 2119899inertia matrix of the leg ℎ119894 is a 2119899 times 1 vector of centrifugaland Coriolis terms 119892119894 is a 2119899 times 1 vector of gravity terms 120591119894is the 2119899 times 1 vector of joint torques 119891119894 is the 2119899 times 1 vectorof ground reaction forces of the 119894th leg and 119869119894 is the Jacobianmatrix from the joints of the 119894th leg to the basic coordinatespace Equation (13) can be rewritten as
119891119894 = 119869minus119879119894 (120579119894) [119863119894 (120579119894) 120579119894 + ℎ119894 (120579119894 120579119894) + 119892119894 (120579119894) minus 120591119894] (14)
Replacing 119891119894 in (11) with (14) the force-moment equilibriumequation (11) can be written as
119860120591 = (15)
where 119860 is an equilibrium matrix for the torque and
119860 = 119860[119869minus1198791 (1205791) 00 119869minus1198792 (1205792)] = 119860[[
1198631 (1205791) 1205791 + ℎ1 (1205791 1205791) + 1198921 (1205791)1198632 (1205792) 1205792 + ℎ2 (1205792 1205792) + 1198922 (1205792)]] minus119882(16)
Equation (15) is the first constraint describing the force-moment equilibrium equation of biped robots
On the other hand considering the friction applied by theleg on the ground the second constraint can be written as
119860ueq120591 le 119861ueq (17)
where 119860ueq isin 119877119898 is the coefficient matrix of the frictionconstraint for the feet
119861ueq = 119860ueq [[1198631 (1205791) 1205791 + ℎ1 (1205791 1205791) + 1198921 (1205791)1198632 (1205792) 1205792 + ℎ2 (1205792 1205792) + 1198922 (1205792)]]
119860ueq = [120583 00 120583] sdot [119869minus1198791 (1205791) 00 119869minus1198792 (1205792)] (18)
where 120583 is the Coulomb friction coefficient between the feetand the touched ground
The third constraint is about the physical limits of themotors which has the form of 120585minus le 120591 le 120585+ 120585minus and 120585+ areknown torque vectors according to the motors in the robot120585minus isin 1198772119899 and 120585+ isin 1198772119899
From the above the energy-efficiency optimization prob-lem can be formulated as the following QP problem
min 12120591119879119876120591 +max (119888119879120591 0) (19)
st 119860120591 = (20)119860ueq120591 le 119861ueq (21)120585minus le 120591 le 120585+ (22)
where the definitions of the symbols can be found in (9) (15)and (17)
Mathematical Problems in Engineering 5
As we can see now the strategy for minimizing theenergy consumption of biped robots is finally formulated as aconstrained QP problem (see (19)ndash(22)) In the next sectionwe are going to solve this QP problem using neurodynamics
4 Solve the QP Problem forEnergy Optimization
First of all the QP problem described in (19)ndash(22) needs tobe converted to a LVI problem For this purpose 120594 and 120573are defined as the dual decision vectors corresponding to theequality constraint (20) and the inequality constraint (21)respectively As a result the primal-dual decision vector119910 andits upperlower bounds 119910plusmn are defined as follows
119910 fl [[[120591120594120573]]]
119910+ fl [[[[120585++120594++120594+]]]]
119910minus fl [[[[120585minusminus120594+minus120594+]]]] isin 119877
2119899+119897+119898(23)
where elements 120594+119894 ≫ 0 in 120594+ are defined sufficientlypositive to represent infinity for any 119894 for the convenience ofsimulation and hardware implementation of the operationThe convex set Ω made by primal-dual decision vector 119910 ispresented as Ω = 119910minus le 119910 le 119910+ Then the QP problem in(19)ndash(22) is equivalent to the following LVI problem
(119910 minus 119910lowast)119879 (119872119910lowast + 119901) ge 0 forall119910 isin Ω (24)
That is to say we need to find a vector 119910lowast isin Ω = 119910 | 119910minus le119910 le 119910+with a coefficient matrix119872 and a vector 119901 as follows119872 fl
[[[[119876 minus119860119879 119860119879ueq119860 0 0minus119860ueq 0 0
]]]] isin 119877(2119899+119897+119898)times(2119899+119897+119898)
119901 fl [[[[119888minus119861ueq]]]] isin 119877
(2119899+119897+119898)(25)
As a summary of this step a theorem and the correspondingproof are given below
Theorem 5 (see [21] (LVI formulation)) The QP problem in(19)ndash(22) is equivalent to the following LVI problem that isto find a vector 119910lowast isin Ω = 119910 | 119910minus le 119910 le 119910+ such that(119910 minus 119910lowast)119879(119872119910lowast + 119901) ge 0 forall119910 isin Ω where coefficients 119910plusmn119872and 119901 are defined in (24) and (23) respectively
Proof From [21] we know that the Lagrangian dual prob-lem of the QP problem in (19)ndash(22) is to maximizeinf120591isin1198772119899119871(120591 120594 Vminus V+) over 120594 Vminus ge 0 and V+ ge 0 where119871 (120591 120594 Vminus V+) = 2119899sum
119894=1
[121205911198942119876119894 + 119888119894120591119894 + 120594119894 (minus119860 119894120591119894 + 119894)+ 120573119894 (119860ueq 119894120591119894 minus 119861ueq 119894) + V119894minus (minus120591119894 + 120585119894minus)+ V119894+ (120591119894 minus 120585119894+)]
(26)
Note that function 119871(120591 120594 Vminus V+) is convex with given 120594 isin119877119897 Vminus isin 1198772119899 and V+ isin 1198772119899 Therefore the necessary andsufficient condition for a minimum is2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894120594119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0 (27)
Thus the dual problem of (19)ndash(22) can be derived as
maximize2119899sum119894=1
[121205911198942119876119894 + 119888119894120591119894 + 120594119894 (minus119860 119894120591119894 + 119894) + 120573119894 (119860ueq 119894120591119894 minus 119861ueq 119894) + V119894minus (minus120591119894 + 120585119894minus) + V119894+ (120591119894 minus 120585119894+)]subject to
2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894119910119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0120594119894 unrestricted V119894minus ge 0 V119894+ ge 0(28)
Multiplying both sides of (27) by 120591 we haveminus 2119899sum119894=1
1205911198942119876119894= 2119899sum119894=1
[120591119894119888119894 minus 120591119894119860 119894120594119894 + 120591119894119860ueq119894120573119894 + 120591119894 (minusV119894minus + V119894+)] (29)
Then the dual form can be rewritten as
maximize2119899sum119894=1
[minus121205911198942119876119894 + 119894120594119894 minus 119861ueq 119894120573119894 + 120585119894minusV119894minus minus 120585119894+V119894+]subject to
2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894120594119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0
6 Mathematical Problems in Engineering
120594119894 unrestricted V119894minus ge 0 V119894+ ge 0(30)
To obtain the optimum (120591lowast 120594lowast Vminuslowast V+lowast) of the primal prob-lem (see (19)ndash(22)) and its dual problem (see (30)) thenecessary and sufficient conditions are as follows
Primal feasibility
2119899sum119894=1
(119860 119894120591119894lowast minus 119894) = 0 (31)
2119899sum119894=1
(minus119860ueq 119894120591119894lowast + 119861ueq 119894) ge 02119899sum119894=1
120585119894minus le 2119899sum119894=1
120591119894lowast le 2119899sum119894=1
120585119894+ (32)
Dual feasibility
2119899sum119894=1
(119876119894120591119894 + 119888119894 minus 119860 119894119910119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+) = 0120594119894 unrestricted 120573119894 ge 0 V119894minus ge 0 V119894+ ge 0 (33)
Complementarity
2119899sum119894=1
120573119894lowast (minus119860ueq 119894120591119894lowast + 119861ueq 119894) = 0 (34)
2119899sum119894=1
V119894minuslowast (minus120591119894lowast + 120585119894minus) = 0 (35)
2119899sum119894=1
V119894+lowast (120591119894lowast minus 120585119894+) = 0 (36)
To simplify the above necessary and sufficient conditionsby defining Vlowast119894 = Vminuslowast119894 minus V+lowast119894 and considering (35)-(36) dualfeasibility constraint (33) becomes
2119899sum119894=1
(119876119894120591119894lowast + 119888119894 minus 119860 119894120594119894lowast + 119860ueq 119894120573119894lowast)= 2119899sum119894=1
V119894lowast
le 0 120591lowast119894 = 120585+119894= 0 120591lowast119894 isin (120585minus119894 120585+119894 )ge 0 120591lowast119894 = 120585minus119894 (37)
which is equal to the following LVI problem to find anoptimum 120591lowast isin Ω1 such that
2119899sum119894=1
(120591119894 minus 120591119894lowast) (119876119894120591119894lowast + 119888119894 minus 119860 119894120594119894lowast + 119860ueq 119894120573119894lowast) ge 0forall120591 isin Ω1 (38)
whereΩ1 = 120591 | 120585minus le 120591lowast le 120585+
In addition by defining Ω2 fl 120594 | 120594 isin 119877119897 we have thefollowing LVI for the equality constraint (31) to find 120594lowast isin Ω2such that
2119899sum119894=1
(120594119894 minus 120594119894lowast) (119860 119894120591119894lowast minus 119894) ge 0 forall120594 isin Ω2 (39)
Similarly by defining Ω3 = 120573 | 120573 isin 119877119898 we havethe following LVI for the inequality constraint (32) and theequality constraint (34) to find 120573lowast isin Ω3 such that2119899sum119894=1
(120573119894 minus 120573119894lowast) (minus119860ueq 119894120591119894lowast + 119861ueq 119894) ge 0 forall120573 isin Ω3 (40)
By taking the Cartesian product of the three sets Ω1Ω2 and Ω3 defined above we formulate the convex set Ωpresented in (24) as follows
Ω = Ω1 times Ω2 times Ω3 = 119910 = (120591119879 120594119879 120573119879)119879isin 119877(2119899+119897+119898) | 120585minus le 120591lowast le 120585+ 120594 unrestricted 120573 ge 0= 119910 =
[[[120591120594120573]]] isin 119877(2119899+119897+119898) |
[[[[120585minusminus120594+minus120594+]]]] le[[[120591120594120573]]]
le [[[[120585+120594+120594+]]]] = 119910 isin 119877
(2119899+119897+119898) | 119910minus le 119910 le 119910+ (41)
In consequence LVIs (38)ndash(40) can be combined into an LVIin the matrix form that is to find an optimum 119910lowast isin Ω suchthat 119910 = (120591119879 120594119879 120573119879)119879 isin Ω and([[[120591120594120573]]] minus [[[
120591lowast120594lowast120573lowast]]])119879
sdot ([[[[119876 minus119860119879 119860119879ueq119860 0 0minus119860ueq 0 0
]]]][[[120591lowast120594lowast120573lowast]]] +
[[[[119888minus119861ueq]]]])
ge 0 forall[[[120591120594120573]]] isin Ω
(42)
Contrasting the definitions of 119910plusmn in (23) and119872 and 119901 in (25)the above LVIs (see (42)) are exactly in the compact form (see(25)) as the equivalence ofQPproblem in (19)ndash(22)Theproofis then completed
On the other hand from [20] it is known that LVI in(25) is equivalent to the following system of piecewise linearequations 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 = 0 (43)
Mathematical Problems in Engineering 7
where 119875Ω(sdot) is a piecewise linear projection operator with the119894th projection element of 119875Ω(119910) = [119875Ω(1199101) 119875Ω(1199102119899+119897+119898)]119879being defined as
119875Ω (119910119894) = 119910minus119894 if 119910119894 lt 119910minus119894119910119894 if 119910minus119894 le 119910119894 le 119910+119894 119910+119894 if 119910119894 gt 119910+119894 forall119894 isin 1 2119899 + 119897 + 119898
(44)
To solve linear projection equation (43) the dual dynamicalsystem design approach presented in [20] is adopted tobuild a dynamical system Considering the asymmetric 119872a primal-dual neural network is developed as follows to solve(43) 119910 = 120574 (119868 +119872119879) 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (45)
where 120574 gt 0 is a design parameter used to scale theconvergence rate of the system The convergence rate isimproved when the value of 120574 is increased Furthermore byreplacing 120574(119868+119872119879)with 120572 the dynamical system (45) can berewritten as follows119910 = 120572 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (46)
where 120572 is a positive design parameter for the convergencerate of the PDNN (see (46)) About the convergence analysisof the above-mentioned primal-dual dynamical solver thereis a theorem presented as follows
Theorem 6 (see [22]) Starting from any initial state thestate vector 119910(119905) of primal-dual dynamical system (45) isconvergent to an equilibrium point 119910lowast of which the first 2119899elements constitute the optimal solution 120591lowast to the quadraticprogramming problem in (19)ndash(22) Moreover the exponentialconvergence can be achieved if there exists a constant 120588 gt 0such that 1003817100381710038171003817119910 minus 119875Ω (119910 minus (119872119910 + 119901))100381710038171003817100381722 ge 120588 1003817100381710038171003817119910 minus 119910lowast100381710038171003817100381722 (47)
Remark 7 As a primal-dual dynamical solver primal-dualneural networks can efficiently generate exact optimal solu-tions [21] Furthermore compared to dual neural networksthe LVI- (linear variational inequality-) based primal-dualneural networks do not entail any matrix inversion onlineso that they can reduce the computational time greatly [20]Therefore a LVI-based primal-dual neural network is appliedto perform theminimization of the energy consumptionwithequality and inequality constraints for biped robots in thiswork
5 Neurodynamics-Based EnergyOptimization Control
Over the past two decades much progress has been madein the control of robot systems based on various controltechniques In [30] two novel robust adaptive PID control
schemes are proposed to solve the strong nonlinearity andcoupling problems in robot manipulator control In [31] asupport vector regression-based control system is proposedto learn the external disturbances and increase the zero-moment-point stability margin of humanoid robots In [32]a kinematics open-loop control system of hexapod robot withan embedded digital signal controller is proposed In [33] anopen-loop controller is implemented on field programmablegate array (FPGA) of the robot Experimental results revealthe viability of the proposed controller
On the other hand many mature techniques have beenused to track the planned trajectories with a certain controlstrategy In [34] a trajectory generator and a joint trajectorytracking controller are designed The proposed combinationis successfully implemented and the robot is able to walkat 011ms Literature [35] considers the problem of jointtrajectory control with oscillations cancelling for planarmultilink flexible manipulators A feed-forward torque isdesigned to preset the elastic coordinates of the system sothat the controller is able to drive the arm along the desiredtrajectory In [36] in order to reduce gait planning andto get a good tracking performance master-slaver dual-legcoordination control was proposed for the biped robot withheterogeneous legs In [37] an open-closed-loop iterativelearning control algorithm with angle correction term isproposed which uses the error signal and the deviation oftwo adjacent error signals to adjust itself
In this work the proposed neurodynamics-basedmethodis an open-loop controller As shown in Figure 1 controlmethod based on energy-efficiency optimization is proposedto obtain the trade-off between the force-moment equilib-rium and energy efficiency for biped walking by minimizingthe energy-related cost function while guaranteeing physicalconstraints There are two parts in the control system QPproblem for energy optimization and a LVI-based primal-dual neural network for solving the QP problemThe controlobject of the proposedmethod is to follow the planned trajec-tories for the biped joints using optimal joint torques deducedby the proposed controller The inputs of the controllerinclude the planned trajectories for the biped joints theforce-moment equilibrium equation of biped robot frictioncoefficient between the ground and the robot and physicalparameters of the motors equipped on the robotThe outputsof the controller are the optimal joint torques for the bipedjoints which are deduced using a LVI-based primal-dualneural network
Firstly the strategy for optimizing the energy efficiencyis formulated as a constrained QP problem Three importantphysical constraints for the biped system are formulated inthis QP problem for energy optimization of biped walkingrobots
Secondly a neurodynamics-based solver is presented tosolve the proposed constrained optimization problem
Thirdly joint trajectories are planned for the biped robotThe planned trajectories provide parameters for the force-moment equilibrium equation of biped robot which is oneof the constraints of the energy optimization QP problem Sothe biped robot is able to make the step and does not fall
8 Mathematical Problems in Engineering
QP problem for energy optimization of biped robots
(see equations (19)ndash(22))
LVI-based primal-dual neural network (PDNN) (see equation (46))
Biped robot
Q
c
p
y
+
+
M
Bipedwalking
Gaitplanning
plusmn
plusmn
PΩ(middot)
I minus M
y
lowast
int
minus le le +
AOK le BuK
st A = W
GCH (12)TQ + GR(cT 0)
minus
minus
[c minusW BOK]T
sum
sum
[[[[[
Q minusAT ATOK
A 0 0
minusAOK 0 0
]]]]]
Figure 1 Neurodynamics-based energy optimization strategy for biped robots
B y
x
z
1
2
3
4
5
6
LNB
LH
LMB
Figure 2 Simplified model of the biped robot
Table 1 Main parameters of the biped robot
Link Length (m) Mass (kg) Inertia moment (kgsdotm2)Torso 0175 1060 001623Thigh 0130 0075 (times2) 000037 (times2)Shank 0130 0075 (times2) 000037 (times2)Foot 0020 0060 (times2) 000004 (times2)6 Simulation Research
To verify the effectiveness of the proposed energy-efficiencycontrol method some simulations are implemented in thissection Matlab is used to model the biped robot and thecontroller
61 Structure and Parameters of the Biped Robot Considera planar biped robot with 6 degrees of freedom shown inFigure 2 The robot consists of one torso and two legs Themain parameters of the biped robot can be found in Table 1
Typical gait is planned for this simulated biped robot towalk on the horizontal ground In this work it is assumed thatthe torso of the biped robotmoves at a constant velocitywith aconstant heightTheCOGof the simplifiedmodel is located atthe geometric center of the torsoThe basic coordinate frame
with its origin at the COG is defined as a body-fixed frameThe whole walking period of the biped robot is considered tobe composed of a single-support phase and an instantaneousdouble-support phase The supporting foot is assumed toremain in full contact with the ground during the single-support phase The trajectories of the ankles and the hips aregiven as follows119910119886 (119896) = 119886120587 2120587119873 + 1119896 minus sin( 2120587119873 + 1119896)
119911119886 (119896) = 119889120587 1 minus cos( 2120587119873 + 1119896)119910ℎ (119896) = 12119910119886 (119896) + 1198862119911ℎ (119896) = 12119911119886 (119896) + 119871 th + 119871 sh minus 1198892 (48)
where 119910ℎ(119896) and 119911ℎ(119896) denote the position of the hip and119910119886(119896) and 119911119886(119896) denote the position of the swinging anklejoint at the 119896th sample 119886 is the walking step length and 119889is the height of swinging ankle 119873 + 1 is the total samplingnumber in a walking cycle 119879 119871 th and 119871 sh are the lengths oflower limbs Here 119889 = 002m and 119879 = 1 s62 Parameters for the QP Problem and the Neurodynamics-Based Solver For the parameters of the constrained QPproblem in (19)ndash(22) the parameters of the motors aredetermined by the motors that are equipped in the robotHere we take a set of typicalmotor parameters as an exampleThe electric resistance of the motor 119877 = 917 (Ω) torqueconstant 119896119872 = 168 times 10minus3 (NmA) gear reduction rate119873 = 200 and the joint gearrsquos mechanical efficiency 120578 = 07Submitting all the above-mentioned parameters to (9) wehave 119876 = 3321198686times6 and 119888 = 143[ 12057911 12057912 12057913 12057921 12057922 12057923]119879where 120579119894 = [ 1205791198941 1205791198942 1205791198943]119879 is the joint velocity vector of the119894th leg Here the joint velocity can be calculated using thegait planned in Section 61 Consider the 119894th leg of a bipedrobot 120579119894(119896 + 1) = [120579119894(119896 + 1) minus 120579119894(119896)]Δ119905 119894 = 1 2 where120579119894(119896 + 1) denotes the joint velocity at the (119896 + 1)th sampleand Δ119905 is the sampling interval The smaller the value of Δ119905is the more accurate but the more computationally intensivethe joint velocity is [38]
Mathematical Problems in Engineering 9
Input layer Hidden layer Output layer
u8 = 1
u1 = 1
u7 = 7
uM = 7
11
12
ML
11
12
LJ
S( Msumm=1
m1um)
S( Msumm=1
m2um)
S( Msumm=1
mLum)
J =Lsuml=1
lJ middot1
(1 + eminussum=1 u)
1 =Lsuml=1
l1 middot1
(1 + eminussum=1 u)
Figure 3 Structure of the three-layered NN
For the constraint condition of force-moment equilib-rium equation the Coulomb friction coefficient depends onthe ground environmentHerewe take120583 = 06 as an exampleThe inertia matrix of the leg 119863119894 the centrifugal and Coriolisterms ℎ119894 and the gravity terms 119892119894 in the dynamic equationcan be calculated using the method shown in [39]
Considering the physical limits of the motors we have120585+ = minus120585minus = [12 12]119879For the neurodynamics-based solver the positive design
parameter for the convergence rate of the PDNN is 120572 = 01which is determined using the trial-and-error method
63 Biped Walking via Different Controllers The proposedcontrol method is tested on the control of the biped robotmentioned above by simulation experiments The perfor-mances of the proposed NEO are compared with those of theSVM control methods [40 41] and NN control methods
For the SVM controller the parameters include a penaltycoefficient 119862 = 1000 degree of the polynomial kernels 119902 = 2width of the RBF kernels 120590 = 015 and mixed coefficientof the mixed kernels 119886 = 095 When training the bipeddynamic we sample the joint variables in the period of 119879 =1 s and let the sampling interval be Δ119905 = 0005 s That isto say there are 200 sampling points in a single walkingperiod the desired sample set satisfying the ZMP criterionis (Θ1 1205911) (Θ200 120591200)
On the other side for comparison with the proposedNEO a three-layered backpropagation (BP) NN is built tocontrol the biped robot Details of the NN are introduced asfollows
Layer 1 (Input Layer) In this layer the input signal is directlytransferred to the next layer that is
119874(1)119898 = 119906119898 (49)
where 119906119898 = Θ = [1205791 1205792 1205796 1205791 1205792 1205796]119879 and 119898 =1 119872 (119872 = 12) is the input variable 119874(1)119898 is the outputof the input layer
Layer 2 (Hidden Layer) Each node in the hidden layerperforms a transfer operation using a Sigmoid function thatis
119874(2)119897 = 119878( 119872sum119898=1
120575119898119897119906119898) = 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (50)
where 119874(2)119897 is the output of the hidden layer 119878(sdot) is a Sigmoidfunction 119897 = 1 119871 is the index of the hidden unitsThe number of the hidden units is designed as 119871 = 20here using the trial-and-error method 120575119898119897 is the connectionweight between the input layer and the hidden layer Theinitial values of the connection weights can be selectedrandomly and different initial values could lead to differentperformance of the NN
Layer 3 (Output Layer) This layer performs the calculationfor the output of the whole network
120591119895 = 119871sum119897=1
120573119895119897 sdot 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (51)
where 120591119895 is the control torque for the 119895th biped joint 119895 =1 119869 (119869 = 6) 120573119895119897 is the connection weight between thehidden layer and the output layerThe initial values of 120573119895119897 canbe selected randomly
By using BP algorithm the NN is trained offline with the200 desired samples for 100 times The structure of the NN isshown in Figure 3
The proposed control method and the above-mentionedtwo intelligent methods are adopted to control the simulatedbiped robot respectively As we can see from Figures 4-5all the three methods can realize the planned biped walking
10 Mathematical Problems in Engineering
minus005
0
005
01
015
02
025
03
035
04
045z
(m)
015 02 025 03 035 04 045 0501x (m)
(a)
015 02 025 03 035 04 045 0501x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 0501x (m)
(c)
Figure 4 Biped walking using different controllers when the step length is 018m (a) SVM (b) NN and (c) the proposed NEO
Energy consumption trajectories are shown in Figures 6-7As shown in the figures the proposed NEO needs less energythan the other methods due to the proposed energy-basedoptimal control For example when the energy consumptionof all the joints is 15979 J for the proposed NEO the energyconsumption is 40910 J for the NN and 31168 J for the SVM(see Table 2) Furthermore the proposed NEO always needsless energy than the other two methods when different bipedmotions are considered (Motion 1 the step length is 018mMotion 2 the step length is 020m) At the same time theSVM controller exhibits greater energy efficiency comparedwith the NN controller The possible cause is that the SVM ismore efficient in learning the energy-efficient controller usinglimited samples
Remark 8 In the simulation section the robotrsquos joint trajec-tories are predefinedThis paper makes contribution by opti-mizing the joint torques to decrease the energy consumptionwithout changing the biped gaits
Table 2 Energy consumption comparisons with other methods
Method Step length (m) E (J)NN
01840910
SVM 31168The proposed NEO 15979NN
02083164
SVM 57229The proposed NEO 31400
Joint torques for different controllers when the step lengthis 020m are shown in Figures 8ndash13 As shown in thefigures the proposed NEO strategy exhibits smaller drivingtorques compared with the NN method and SVM methodIt is because we deduce the optimal joint torque for thebiped robot according to the proposed energy optimizationproblem As a result torque costs of the biped joints are
Mathematical Problems in Engineering 11
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(a)
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 05 055 0601x (m)
(c)
Figure 5 Biped walking using different controllers when the step length is 020m (a) SVM (b) NN and (c) the proposed NEO
NNSVMThe proposed NEO
0
100
200
300
400
500
600
700
800
900
Ener
gy co
nsum
ptio
n (J
)
02 04 06 08 10Time (s)
Figure 6 Energy consumption of the robot joints for different controllers when the step length is 018m
12 Mathematical Problems in Engineering
NNSVMThe proposed NEO
02 04 06 08 10Time (s)
0
200
400
600
800
1000
1200
1400
1600
1800
Ener
gy co
nsum
ptio
n (J
)
Figure 7 Energy consumption of the robot joints for differentcontrollers when the step length is 020m
50 100 150 2000Serial number of the samples
5
6
7
8
9
10
11
12
13
14
15
Join
t tor
que f
or 1
(Nm
)
NNSVMThe proposed NEO
Figure 8 Joint torque for 1205791 deduced by different control methods
reduced remarkably This contributes to the effectivenessof the proposed NEO strategy in terms of reducing theenergy consumption of biped robots At the same time theproposed NEO strategy minimizes the energy consumptionand guarantees three necessary constraints simultaneouslyTherefore the force-moment equilibrium equation of bipedrobots is guaranteed and the biped robot does not fall
On the other hand the SVM controller exhibits greaterenergy efficiency (realize the same motion with smaller driv-ing torques) compared with the NN controller The possiblecause is that the number of the learning samples for the NN
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
3
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 2
(Nm
)Figure 9 Joint torque for 1205792 deduced by different control methods
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 3
(Nm
)
Figure 10 Joint torque for 1205793 deduced by different control methods
controllers is not large enough in this work Conventionalmachine learning methods such as NN use empirical riskminimization (ERM) based on infinite samples which is dis-advantageous to the learning control based on small samplesizes for biped robots The SVM is direct implementationof the structural risk minimization (SRM) principle Thisdifference makes SVM more efficient in resolving the small-sample-sizes learning problems
7 Conclusions
To build a more practical objective function for the energyoptimization of biped robots three important constraints are
Mathematical Problems in Engineering 13
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus12
minus10
minus8
minus6
minus4
minus2
0
Join
t tor
que f
or 4
(Nm
)
Figure 11 Joint torque for 1205794 deduced by different control methods
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus10
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Join
t tor
que f
or 5
(Nm
)
Figure 12 Joint torque for 1205795 deduced by different control methods
incorporated into the optimal controller for biped robotsSimulation results demonstrate that the proposed NEO strat-egy effectively decreases the energy consumption of bipedwalking robot In addition the proposed strategy can guaran-tee the force-moment equilibrium equation and the physicallimits of the motors Coulomb friction is applied between theleg and the ground by setting a friction coefficient The bipedrobot can provide optimal joint torques without slippage ortipping over
It is worth noting that most of the existing algorithmsrealize the energy minimization via optimizing gait param-eters However gait parameters such as foot trajectoriesand the trajectories of the COG are not the only aspect
NNSVMThe proposed NEO
1
2
3
4
5
6
7
8
9
10
Join
t tor
que f
or 6
(Nm
)
50 100 150 2000Serial number of the samples
Figure 13 Joint torque for 1205796 deduced by different control methods
to be concerned Other factors such as the forces andmoments acting on the biped robot can also impose onenergy consumption of the biped robot to a large extent Forexample people walking in the mud or in a gale usually feelmore tiredTherefore when the foot trajectories and theCOGtrajectories are determined optimizing the torques of eachjoint is significant for the energy optimization of the wholebiped system This point is verified by simulations and theresults of this work are significant
In this work the proposed neurodynamics-basedmethodis an open-loop controller In the simulation experiments wedo not introduce any error accumulation during the bipedwalking So the simulated robot is able to follow the plannedtrajectories and does not fall However for a real robotsystem there must be error accumulation introduced by themechanical devices In this situation the biped robot tends todeviate from the reference trajectory if there is no feedbackand correction for error compensating Consequently futureworks will include the design of closed-loop controllerswhich are more suitable for real robot systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (Projects 61403264 and 61305098) andby the Natural Science Foundation of Guangdong Province(Project 2016A030310018) Grateful thanks go to Dr Ye Xian-Ming who gives considerable help by means of environmentsupport
14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
where
119876 = 2119877119896211987212057821198732 1198682119899times2119899119888 = [ 12057911120578 1205791119899120578 12057921120578 1205792119899120578 ]119879
(10)
120591 = [12059111 1205911119899 12059121 1205912119899]119879 119883 = max(119880 119881) denotesthat the elements 119909119894119895 in the matrix 119883 are equal to the biggerelements between 119906119894119895 in the matrix119880 and V119894119895 in the matrix 119881The problem shown in (9) should guarantee three necessaryconstraints
(i) The force-moment equilibrium equation of bipedrobots
(ii) Frictions applied by each leg on the ground to holdthe biped robot without slippage and tipping over
(iii) Physical limits of the motors
Let us beginwith the force-moment equilibrium equationfor the whole biped system which can be written as119860119865 = 119882 (11)
where 119865 = [1198911198791 1198911198792 ]119879 is a vector of the ground reaction forcesacting on the left foot and the right foot
119860 = [119868119899times119899 119868119899times1198991198611 1198612 ]119861119894 = [[[[
0 minus119861119875119894119865119911 119861119875119894119865119910119861119875119894119865119911 0 minus119861119875119894119865119909minus119861119875119894119865119910 119861119875119894119865119909 0
]]]] (12)
where 119861119875119894119865 = [119861119875119894119865119909 119861119875119894119865119910 119861119875119894119865119911]119879 denotes the posi-tion of leg 119894 referring to basic coordinate frame 119882 =[119865119909 119865119910 119865119911119872119909119872119910119872119911]119879 contains the forces and momentsacting on the robotrsquos center of gravity (COG)
Biped dynamics provide the relevance between groundreaction forces acting on the feet and the joint torques of thelegs Consider the 119894th leg of a biped robot the dynamics of thesystem can be expressed in the vector-matrix form as
120591119894 + 119869119879119894 (120579119894) 119891119894 = 119863119894 (120579119894) 120579119894 + ℎ119894 (120579119894 120579119894) + 119892119894 (120579119894) (13)
where 120579119894 = [1205791198941 120579119894119899]119879 is a 2119899 times 1 joint position vector ofthe 119894th leg 119894 = 1 2 for the biped robot 119863119894 is the 2119899 times 2119899inertia matrix of the leg ℎ119894 is a 2119899 times 1 vector of centrifugaland Coriolis terms 119892119894 is a 2119899 times 1 vector of gravity terms 120591119894is the 2119899 times 1 vector of joint torques 119891119894 is the 2119899 times 1 vectorof ground reaction forces of the 119894th leg and 119869119894 is the Jacobianmatrix from the joints of the 119894th leg to the basic coordinatespace Equation (13) can be rewritten as
119891119894 = 119869minus119879119894 (120579119894) [119863119894 (120579119894) 120579119894 + ℎ119894 (120579119894 120579119894) + 119892119894 (120579119894) minus 120591119894] (14)
Replacing 119891119894 in (11) with (14) the force-moment equilibriumequation (11) can be written as
119860120591 = (15)
where 119860 is an equilibrium matrix for the torque and
119860 = 119860[119869minus1198791 (1205791) 00 119869minus1198792 (1205792)] = 119860[[
1198631 (1205791) 1205791 + ℎ1 (1205791 1205791) + 1198921 (1205791)1198632 (1205792) 1205792 + ℎ2 (1205792 1205792) + 1198922 (1205792)]] minus119882(16)
Equation (15) is the first constraint describing the force-moment equilibrium equation of biped robots
On the other hand considering the friction applied by theleg on the ground the second constraint can be written as
119860ueq120591 le 119861ueq (17)
where 119860ueq isin 119877119898 is the coefficient matrix of the frictionconstraint for the feet
119861ueq = 119860ueq [[1198631 (1205791) 1205791 + ℎ1 (1205791 1205791) + 1198921 (1205791)1198632 (1205792) 1205792 + ℎ2 (1205792 1205792) + 1198922 (1205792)]]
119860ueq = [120583 00 120583] sdot [119869minus1198791 (1205791) 00 119869minus1198792 (1205792)] (18)
where 120583 is the Coulomb friction coefficient between the feetand the touched ground
The third constraint is about the physical limits of themotors which has the form of 120585minus le 120591 le 120585+ 120585minus and 120585+ areknown torque vectors according to the motors in the robot120585minus isin 1198772119899 and 120585+ isin 1198772119899
From the above the energy-efficiency optimization prob-lem can be formulated as the following QP problem
min 12120591119879119876120591 +max (119888119879120591 0) (19)
st 119860120591 = (20)119860ueq120591 le 119861ueq (21)120585minus le 120591 le 120585+ (22)
where the definitions of the symbols can be found in (9) (15)and (17)
Mathematical Problems in Engineering 5
As we can see now the strategy for minimizing theenergy consumption of biped robots is finally formulated as aconstrained QP problem (see (19)ndash(22)) In the next sectionwe are going to solve this QP problem using neurodynamics
4 Solve the QP Problem forEnergy Optimization
First of all the QP problem described in (19)ndash(22) needs tobe converted to a LVI problem For this purpose 120594 and 120573are defined as the dual decision vectors corresponding to theequality constraint (20) and the inequality constraint (21)respectively As a result the primal-dual decision vector119910 andits upperlower bounds 119910plusmn are defined as follows
119910 fl [[[120591120594120573]]]
119910+ fl [[[[120585++120594++120594+]]]]
119910minus fl [[[[120585minusminus120594+minus120594+]]]] isin 119877
2119899+119897+119898(23)
where elements 120594+119894 ≫ 0 in 120594+ are defined sufficientlypositive to represent infinity for any 119894 for the convenience ofsimulation and hardware implementation of the operationThe convex set Ω made by primal-dual decision vector 119910 ispresented as Ω = 119910minus le 119910 le 119910+ Then the QP problem in(19)ndash(22) is equivalent to the following LVI problem
(119910 minus 119910lowast)119879 (119872119910lowast + 119901) ge 0 forall119910 isin Ω (24)
That is to say we need to find a vector 119910lowast isin Ω = 119910 | 119910minus le119910 le 119910+with a coefficient matrix119872 and a vector 119901 as follows119872 fl
[[[[119876 minus119860119879 119860119879ueq119860 0 0minus119860ueq 0 0
]]]] isin 119877(2119899+119897+119898)times(2119899+119897+119898)
119901 fl [[[[119888minus119861ueq]]]] isin 119877
(2119899+119897+119898)(25)
As a summary of this step a theorem and the correspondingproof are given below
Theorem 5 (see [21] (LVI formulation)) The QP problem in(19)ndash(22) is equivalent to the following LVI problem that isto find a vector 119910lowast isin Ω = 119910 | 119910minus le 119910 le 119910+ such that(119910 minus 119910lowast)119879(119872119910lowast + 119901) ge 0 forall119910 isin Ω where coefficients 119910plusmn119872and 119901 are defined in (24) and (23) respectively
Proof From [21] we know that the Lagrangian dual prob-lem of the QP problem in (19)ndash(22) is to maximizeinf120591isin1198772119899119871(120591 120594 Vminus V+) over 120594 Vminus ge 0 and V+ ge 0 where119871 (120591 120594 Vminus V+) = 2119899sum
119894=1
[121205911198942119876119894 + 119888119894120591119894 + 120594119894 (minus119860 119894120591119894 + 119894)+ 120573119894 (119860ueq 119894120591119894 minus 119861ueq 119894) + V119894minus (minus120591119894 + 120585119894minus)+ V119894+ (120591119894 minus 120585119894+)]
(26)
Note that function 119871(120591 120594 Vminus V+) is convex with given 120594 isin119877119897 Vminus isin 1198772119899 and V+ isin 1198772119899 Therefore the necessary andsufficient condition for a minimum is2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894120594119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0 (27)
Thus the dual problem of (19)ndash(22) can be derived as
maximize2119899sum119894=1
[121205911198942119876119894 + 119888119894120591119894 + 120594119894 (minus119860 119894120591119894 + 119894) + 120573119894 (119860ueq 119894120591119894 minus 119861ueq 119894) + V119894minus (minus120591119894 + 120585119894minus) + V119894+ (120591119894 minus 120585119894+)]subject to
2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894119910119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0120594119894 unrestricted V119894minus ge 0 V119894+ ge 0(28)
Multiplying both sides of (27) by 120591 we haveminus 2119899sum119894=1
1205911198942119876119894= 2119899sum119894=1
[120591119894119888119894 minus 120591119894119860 119894120594119894 + 120591119894119860ueq119894120573119894 + 120591119894 (minusV119894minus + V119894+)] (29)
Then the dual form can be rewritten as
maximize2119899sum119894=1
[minus121205911198942119876119894 + 119894120594119894 minus 119861ueq 119894120573119894 + 120585119894minusV119894minus minus 120585119894+V119894+]subject to
2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894120594119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0
6 Mathematical Problems in Engineering
120594119894 unrestricted V119894minus ge 0 V119894+ ge 0(30)
To obtain the optimum (120591lowast 120594lowast Vminuslowast V+lowast) of the primal prob-lem (see (19)ndash(22)) and its dual problem (see (30)) thenecessary and sufficient conditions are as follows
Primal feasibility
2119899sum119894=1
(119860 119894120591119894lowast minus 119894) = 0 (31)
2119899sum119894=1
(minus119860ueq 119894120591119894lowast + 119861ueq 119894) ge 02119899sum119894=1
120585119894minus le 2119899sum119894=1
120591119894lowast le 2119899sum119894=1
120585119894+ (32)
Dual feasibility
2119899sum119894=1
(119876119894120591119894 + 119888119894 minus 119860 119894119910119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+) = 0120594119894 unrestricted 120573119894 ge 0 V119894minus ge 0 V119894+ ge 0 (33)
Complementarity
2119899sum119894=1
120573119894lowast (minus119860ueq 119894120591119894lowast + 119861ueq 119894) = 0 (34)
2119899sum119894=1
V119894minuslowast (minus120591119894lowast + 120585119894minus) = 0 (35)
2119899sum119894=1
V119894+lowast (120591119894lowast minus 120585119894+) = 0 (36)
To simplify the above necessary and sufficient conditionsby defining Vlowast119894 = Vminuslowast119894 minus V+lowast119894 and considering (35)-(36) dualfeasibility constraint (33) becomes
2119899sum119894=1
(119876119894120591119894lowast + 119888119894 minus 119860 119894120594119894lowast + 119860ueq 119894120573119894lowast)= 2119899sum119894=1
V119894lowast
le 0 120591lowast119894 = 120585+119894= 0 120591lowast119894 isin (120585minus119894 120585+119894 )ge 0 120591lowast119894 = 120585minus119894 (37)
which is equal to the following LVI problem to find anoptimum 120591lowast isin Ω1 such that
2119899sum119894=1
(120591119894 minus 120591119894lowast) (119876119894120591119894lowast + 119888119894 minus 119860 119894120594119894lowast + 119860ueq 119894120573119894lowast) ge 0forall120591 isin Ω1 (38)
whereΩ1 = 120591 | 120585minus le 120591lowast le 120585+
In addition by defining Ω2 fl 120594 | 120594 isin 119877119897 we have thefollowing LVI for the equality constraint (31) to find 120594lowast isin Ω2such that
2119899sum119894=1
(120594119894 minus 120594119894lowast) (119860 119894120591119894lowast minus 119894) ge 0 forall120594 isin Ω2 (39)
Similarly by defining Ω3 = 120573 | 120573 isin 119877119898 we havethe following LVI for the inequality constraint (32) and theequality constraint (34) to find 120573lowast isin Ω3 such that2119899sum119894=1
(120573119894 minus 120573119894lowast) (minus119860ueq 119894120591119894lowast + 119861ueq 119894) ge 0 forall120573 isin Ω3 (40)
By taking the Cartesian product of the three sets Ω1Ω2 and Ω3 defined above we formulate the convex set Ωpresented in (24) as follows
Ω = Ω1 times Ω2 times Ω3 = 119910 = (120591119879 120594119879 120573119879)119879isin 119877(2119899+119897+119898) | 120585minus le 120591lowast le 120585+ 120594 unrestricted 120573 ge 0= 119910 =
[[[120591120594120573]]] isin 119877(2119899+119897+119898) |
[[[[120585minusminus120594+minus120594+]]]] le[[[120591120594120573]]]
le [[[[120585+120594+120594+]]]] = 119910 isin 119877
(2119899+119897+119898) | 119910minus le 119910 le 119910+ (41)
In consequence LVIs (38)ndash(40) can be combined into an LVIin the matrix form that is to find an optimum 119910lowast isin Ω suchthat 119910 = (120591119879 120594119879 120573119879)119879 isin Ω and([[[120591120594120573]]] minus [[[
120591lowast120594lowast120573lowast]]])119879
sdot ([[[[119876 minus119860119879 119860119879ueq119860 0 0minus119860ueq 0 0
]]]][[[120591lowast120594lowast120573lowast]]] +
[[[[119888minus119861ueq]]]])
ge 0 forall[[[120591120594120573]]] isin Ω
(42)
Contrasting the definitions of 119910plusmn in (23) and119872 and 119901 in (25)the above LVIs (see (42)) are exactly in the compact form (see(25)) as the equivalence ofQPproblem in (19)ndash(22)Theproofis then completed
On the other hand from [20] it is known that LVI in(25) is equivalent to the following system of piecewise linearequations 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 = 0 (43)
Mathematical Problems in Engineering 7
where 119875Ω(sdot) is a piecewise linear projection operator with the119894th projection element of 119875Ω(119910) = [119875Ω(1199101) 119875Ω(1199102119899+119897+119898)]119879being defined as
119875Ω (119910119894) = 119910minus119894 if 119910119894 lt 119910minus119894119910119894 if 119910minus119894 le 119910119894 le 119910+119894 119910+119894 if 119910119894 gt 119910+119894 forall119894 isin 1 2119899 + 119897 + 119898
(44)
To solve linear projection equation (43) the dual dynamicalsystem design approach presented in [20] is adopted tobuild a dynamical system Considering the asymmetric 119872a primal-dual neural network is developed as follows to solve(43) 119910 = 120574 (119868 +119872119879) 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (45)
where 120574 gt 0 is a design parameter used to scale theconvergence rate of the system The convergence rate isimproved when the value of 120574 is increased Furthermore byreplacing 120574(119868+119872119879)with 120572 the dynamical system (45) can berewritten as follows119910 = 120572 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (46)
where 120572 is a positive design parameter for the convergencerate of the PDNN (see (46)) About the convergence analysisof the above-mentioned primal-dual dynamical solver thereis a theorem presented as follows
Theorem 6 (see [22]) Starting from any initial state thestate vector 119910(119905) of primal-dual dynamical system (45) isconvergent to an equilibrium point 119910lowast of which the first 2119899elements constitute the optimal solution 120591lowast to the quadraticprogramming problem in (19)ndash(22) Moreover the exponentialconvergence can be achieved if there exists a constant 120588 gt 0such that 1003817100381710038171003817119910 minus 119875Ω (119910 minus (119872119910 + 119901))100381710038171003817100381722 ge 120588 1003817100381710038171003817119910 minus 119910lowast100381710038171003817100381722 (47)
Remark 7 As a primal-dual dynamical solver primal-dualneural networks can efficiently generate exact optimal solu-tions [21] Furthermore compared to dual neural networksthe LVI- (linear variational inequality-) based primal-dualneural networks do not entail any matrix inversion onlineso that they can reduce the computational time greatly [20]Therefore a LVI-based primal-dual neural network is appliedto perform theminimization of the energy consumptionwithequality and inequality constraints for biped robots in thiswork
5 Neurodynamics-Based EnergyOptimization Control
Over the past two decades much progress has been madein the control of robot systems based on various controltechniques In [30] two novel robust adaptive PID control
schemes are proposed to solve the strong nonlinearity andcoupling problems in robot manipulator control In [31] asupport vector regression-based control system is proposedto learn the external disturbances and increase the zero-moment-point stability margin of humanoid robots In [32]a kinematics open-loop control system of hexapod robot withan embedded digital signal controller is proposed In [33] anopen-loop controller is implemented on field programmablegate array (FPGA) of the robot Experimental results revealthe viability of the proposed controller
On the other hand many mature techniques have beenused to track the planned trajectories with a certain controlstrategy In [34] a trajectory generator and a joint trajectorytracking controller are designed The proposed combinationis successfully implemented and the robot is able to walkat 011ms Literature [35] considers the problem of jointtrajectory control with oscillations cancelling for planarmultilink flexible manipulators A feed-forward torque isdesigned to preset the elastic coordinates of the system sothat the controller is able to drive the arm along the desiredtrajectory In [36] in order to reduce gait planning andto get a good tracking performance master-slaver dual-legcoordination control was proposed for the biped robot withheterogeneous legs In [37] an open-closed-loop iterativelearning control algorithm with angle correction term isproposed which uses the error signal and the deviation oftwo adjacent error signals to adjust itself
In this work the proposed neurodynamics-basedmethodis an open-loop controller As shown in Figure 1 controlmethod based on energy-efficiency optimization is proposedto obtain the trade-off between the force-moment equilib-rium and energy efficiency for biped walking by minimizingthe energy-related cost function while guaranteeing physicalconstraints There are two parts in the control system QPproblem for energy optimization and a LVI-based primal-dual neural network for solving the QP problemThe controlobject of the proposedmethod is to follow the planned trajec-tories for the biped joints using optimal joint torques deducedby the proposed controller The inputs of the controllerinclude the planned trajectories for the biped joints theforce-moment equilibrium equation of biped robot frictioncoefficient between the ground and the robot and physicalparameters of the motors equipped on the robotThe outputsof the controller are the optimal joint torques for the bipedjoints which are deduced using a LVI-based primal-dualneural network
Firstly the strategy for optimizing the energy efficiencyis formulated as a constrained QP problem Three importantphysical constraints for the biped system are formulated inthis QP problem for energy optimization of biped walkingrobots
Secondly a neurodynamics-based solver is presented tosolve the proposed constrained optimization problem
Thirdly joint trajectories are planned for the biped robotThe planned trajectories provide parameters for the force-moment equilibrium equation of biped robot which is oneof the constraints of the energy optimization QP problem Sothe biped robot is able to make the step and does not fall
8 Mathematical Problems in Engineering
QP problem for energy optimization of biped robots
(see equations (19)ndash(22))
LVI-based primal-dual neural network (PDNN) (see equation (46))
Biped robot
Q
c
p
y
+
+
M
Bipedwalking
Gaitplanning
plusmn
plusmn
PΩ(middot)
I minus M
y
lowast
int
minus le le +
AOK le BuK
st A = W
GCH (12)TQ + GR(cT 0)
minus
minus
[c minusW BOK]T
sum
sum
[[[[[
Q minusAT ATOK
A 0 0
minusAOK 0 0
]]]]]
Figure 1 Neurodynamics-based energy optimization strategy for biped robots
B y
x
z
1
2
3
4
5
6
LNB
LH
LMB
Figure 2 Simplified model of the biped robot
Table 1 Main parameters of the biped robot
Link Length (m) Mass (kg) Inertia moment (kgsdotm2)Torso 0175 1060 001623Thigh 0130 0075 (times2) 000037 (times2)Shank 0130 0075 (times2) 000037 (times2)Foot 0020 0060 (times2) 000004 (times2)6 Simulation Research
To verify the effectiveness of the proposed energy-efficiencycontrol method some simulations are implemented in thissection Matlab is used to model the biped robot and thecontroller
61 Structure and Parameters of the Biped Robot Considera planar biped robot with 6 degrees of freedom shown inFigure 2 The robot consists of one torso and two legs Themain parameters of the biped robot can be found in Table 1
Typical gait is planned for this simulated biped robot towalk on the horizontal ground In this work it is assumed thatthe torso of the biped robotmoves at a constant velocitywith aconstant heightTheCOGof the simplifiedmodel is located atthe geometric center of the torsoThe basic coordinate frame
with its origin at the COG is defined as a body-fixed frameThe whole walking period of the biped robot is considered tobe composed of a single-support phase and an instantaneousdouble-support phase The supporting foot is assumed toremain in full contact with the ground during the single-support phase The trajectories of the ankles and the hips aregiven as follows119910119886 (119896) = 119886120587 2120587119873 + 1119896 minus sin( 2120587119873 + 1119896)
119911119886 (119896) = 119889120587 1 minus cos( 2120587119873 + 1119896)119910ℎ (119896) = 12119910119886 (119896) + 1198862119911ℎ (119896) = 12119911119886 (119896) + 119871 th + 119871 sh minus 1198892 (48)
where 119910ℎ(119896) and 119911ℎ(119896) denote the position of the hip and119910119886(119896) and 119911119886(119896) denote the position of the swinging anklejoint at the 119896th sample 119886 is the walking step length and 119889is the height of swinging ankle 119873 + 1 is the total samplingnumber in a walking cycle 119879 119871 th and 119871 sh are the lengths oflower limbs Here 119889 = 002m and 119879 = 1 s62 Parameters for the QP Problem and the Neurodynamics-Based Solver For the parameters of the constrained QPproblem in (19)ndash(22) the parameters of the motors aredetermined by the motors that are equipped in the robotHere we take a set of typicalmotor parameters as an exampleThe electric resistance of the motor 119877 = 917 (Ω) torqueconstant 119896119872 = 168 times 10minus3 (NmA) gear reduction rate119873 = 200 and the joint gearrsquos mechanical efficiency 120578 = 07Submitting all the above-mentioned parameters to (9) wehave 119876 = 3321198686times6 and 119888 = 143[ 12057911 12057912 12057913 12057921 12057922 12057923]119879where 120579119894 = [ 1205791198941 1205791198942 1205791198943]119879 is the joint velocity vector of the119894th leg Here the joint velocity can be calculated using thegait planned in Section 61 Consider the 119894th leg of a bipedrobot 120579119894(119896 + 1) = [120579119894(119896 + 1) minus 120579119894(119896)]Δ119905 119894 = 1 2 where120579119894(119896 + 1) denotes the joint velocity at the (119896 + 1)th sampleand Δ119905 is the sampling interval The smaller the value of Δ119905is the more accurate but the more computationally intensivethe joint velocity is [38]
Mathematical Problems in Engineering 9
Input layer Hidden layer Output layer
u8 = 1
u1 = 1
u7 = 7
uM = 7
11
12
ML
11
12
LJ
S( Msumm=1
m1um)
S( Msumm=1
m2um)
S( Msumm=1
mLum)
J =Lsuml=1
lJ middot1
(1 + eminussum=1 u)
1 =Lsuml=1
l1 middot1
(1 + eminussum=1 u)
Figure 3 Structure of the three-layered NN
For the constraint condition of force-moment equilib-rium equation the Coulomb friction coefficient depends onthe ground environmentHerewe take120583 = 06 as an exampleThe inertia matrix of the leg 119863119894 the centrifugal and Coriolisterms ℎ119894 and the gravity terms 119892119894 in the dynamic equationcan be calculated using the method shown in [39]
Considering the physical limits of the motors we have120585+ = minus120585minus = [12 12]119879For the neurodynamics-based solver the positive design
parameter for the convergence rate of the PDNN is 120572 = 01which is determined using the trial-and-error method
63 Biped Walking via Different Controllers The proposedcontrol method is tested on the control of the biped robotmentioned above by simulation experiments The perfor-mances of the proposed NEO are compared with those of theSVM control methods [40 41] and NN control methods
For the SVM controller the parameters include a penaltycoefficient 119862 = 1000 degree of the polynomial kernels 119902 = 2width of the RBF kernels 120590 = 015 and mixed coefficientof the mixed kernels 119886 = 095 When training the bipeddynamic we sample the joint variables in the period of 119879 =1 s and let the sampling interval be Δ119905 = 0005 s That isto say there are 200 sampling points in a single walkingperiod the desired sample set satisfying the ZMP criterionis (Θ1 1205911) (Θ200 120591200)
On the other side for comparison with the proposedNEO a three-layered backpropagation (BP) NN is built tocontrol the biped robot Details of the NN are introduced asfollows
Layer 1 (Input Layer) In this layer the input signal is directlytransferred to the next layer that is
119874(1)119898 = 119906119898 (49)
where 119906119898 = Θ = [1205791 1205792 1205796 1205791 1205792 1205796]119879 and 119898 =1 119872 (119872 = 12) is the input variable 119874(1)119898 is the outputof the input layer
Layer 2 (Hidden Layer) Each node in the hidden layerperforms a transfer operation using a Sigmoid function thatis
119874(2)119897 = 119878( 119872sum119898=1
120575119898119897119906119898) = 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (50)
where 119874(2)119897 is the output of the hidden layer 119878(sdot) is a Sigmoidfunction 119897 = 1 119871 is the index of the hidden unitsThe number of the hidden units is designed as 119871 = 20here using the trial-and-error method 120575119898119897 is the connectionweight between the input layer and the hidden layer Theinitial values of the connection weights can be selectedrandomly and different initial values could lead to differentperformance of the NN
Layer 3 (Output Layer) This layer performs the calculationfor the output of the whole network
120591119895 = 119871sum119897=1
120573119895119897 sdot 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (51)
where 120591119895 is the control torque for the 119895th biped joint 119895 =1 119869 (119869 = 6) 120573119895119897 is the connection weight between thehidden layer and the output layerThe initial values of 120573119895119897 canbe selected randomly
By using BP algorithm the NN is trained offline with the200 desired samples for 100 times The structure of the NN isshown in Figure 3
The proposed control method and the above-mentionedtwo intelligent methods are adopted to control the simulatedbiped robot respectively As we can see from Figures 4-5all the three methods can realize the planned biped walking
10 Mathematical Problems in Engineering
minus005
0
005
01
015
02
025
03
035
04
045z
(m)
015 02 025 03 035 04 045 0501x (m)
(a)
015 02 025 03 035 04 045 0501x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 0501x (m)
(c)
Figure 4 Biped walking using different controllers when the step length is 018m (a) SVM (b) NN and (c) the proposed NEO
Energy consumption trajectories are shown in Figures 6-7As shown in the figures the proposed NEO needs less energythan the other methods due to the proposed energy-basedoptimal control For example when the energy consumptionof all the joints is 15979 J for the proposed NEO the energyconsumption is 40910 J for the NN and 31168 J for the SVM(see Table 2) Furthermore the proposed NEO always needsless energy than the other two methods when different bipedmotions are considered (Motion 1 the step length is 018mMotion 2 the step length is 020m) At the same time theSVM controller exhibits greater energy efficiency comparedwith the NN controller The possible cause is that the SVM ismore efficient in learning the energy-efficient controller usinglimited samples
Remark 8 In the simulation section the robotrsquos joint trajec-tories are predefinedThis paper makes contribution by opti-mizing the joint torques to decrease the energy consumptionwithout changing the biped gaits
Table 2 Energy consumption comparisons with other methods
Method Step length (m) E (J)NN
01840910
SVM 31168The proposed NEO 15979NN
02083164
SVM 57229The proposed NEO 31400
Joint torques for different controllers when the step lengthis 020m are shown in Figures 8ndash13 As shown in thefigures the proposed NEO strategy exhibits smaller drivingtorques compared with the NN method and SVM methodIt is because we deduce the optimal joint torque for thebiped robot according to the proposed energy optimizationproblem As a result torque costs of the biped joints are
Mathematical Problems in Engineering 11
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(a)
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 05 055 0601x (m)
(c)
Figure 5 Biped walking using different controllers when the step length is 020m (a) SVM (b) NN and (c) the proposed NEO
NNSVMThe proposed NEO
0
100
200
300
400
500
600
700
800
900
Ener
gy co
nsum
ptio
n (J
)
02 04 06 08 10Time (s)
Figure 6 Energy consumption of the robot joints for different controllers when the step length is 018m
12 Mathematical Problems in Engineering
NNSVMThe proposed NEO
02 04 06 08 10Time (s)
0
200
400
600
800
1000
1200
1400
1600
1800
Ener
gy co
nsum
ptio
n (J
)
Figure 7 Energy consumption of the robot joints for differentcontrollers when the step length is 020m
50 100 150 2000Serial number of the samples
5
6
7
8
9
10
11
12
13
14
15
Join
t tor
que f
or 1
(Nm
)
NNSVMThe proposed NEO
Figure 8 Joint torque for 1205791 deduced by different control methods
reduced remarkably This contributes to the effectivenessof the proposed NEO strategy in terms of reducing theenergy consumption of biped robots At the same time theproposed NEO strategy minimizes the energy consumptionand guarantees three necessary constraints simultaneouslyTherefore the force-moment equilibrium equation of bipedrobots is guaranteed and the biped robot does not fall
On the other hand the SVM controller exhibits greaterenergy efficiency (realize the same motion with smaller driv-ing torques) compared with the NN controller The possiblecause is that the number of the learning samples for the NN
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
3
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 2
(Nm
)Figure 9 Joint torque for 1205792 deduced by different control methods
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 3
(Nm
)
Figure 10 Joint torque for 1205793 deduced by different control methods
controllers is not large enough in this work Conventionalmachine learning methods such as NN use empirical riskminimization (ERM) based on infinite samples which is dis-advantageous to the learning control based on small samplesizes for biped robots The SVM is direct implementationof the structural risk minimization (SRM) principle Thisdifference makes SVM more efficient in resolving the small-sample-sizes learning problems
7 Conclusions
To build a more practical objective function for the energyoptimization of biped robots three important constraints are
Mathematical Problems in Engineering 13
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus12
minus10
minus8
minus6
minus4
minus2
0
Join
t tor
que f
or 4
(Nm
)
Figure 11 Joint torque for 1205794 deduced by different control methods
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus10
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Join
t tor
que f
or 5
(Nm
)
Figure 12 Joint torque for 1205795 deduced by different control methods
incorporated into the optimal controller for biped robotsSimulation results demonstrate that the proposed NEO strat-egy effectively decreases the energy consumption of bipedwalking robot In addition the proposed strategy can guaran-tee the force-moment equilibrium equation and the physicallimits of the motors Coulomb friction is applied between theleg and the ground by setting a friction coefficient The bipedrobot can provide optimal joint torques without slippage ortipping over
It is worth noting that most of the existing algorithmsrealize the energy minimization via optimizing gait param-eters However gait parameters such as foot trajectoriesand the trajectories of the COG are not the only aspect
NNSVMThe proposed NEO
1
2
3
4
5
6
7
8
9
10
Join
t tor
que f
or 6
(Nm
)
50 100 150 2000Serial number of the samples
Figure 13 Joint torque for 1205796 deduced by different control methods
to be concerned Other factors such as the forces andmoments acting on the biped robot can also impose onenergy consumption of the biped robot to a large extent Forexample people walking in the mud or in a gale usually feelmore tiredTherefore when the foot trajectories and theCOGtrajectories are determined optimizing the torques of eachjoint is significant for the energy optimization of the wholebiped system This point is verified by simulations and theresults of this work are significant
In this work the proposed neurodynamics-basedmethodis an open-loop controller In the simulation experiments wedo not introduce any error accumulation during the bipedwalking So the simulated robot is able to follow the plannedtrajectories and does not fall However for a real robotsystem there must be error accumulation introduced by themechanical devices In this situation the biped robot tends todeviate from the reference trajectory if there is no feedbackand correction for error compensating Consequently futureworks will include the design of closed-loop controllerswhich are more suitable for real robot systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (Projects 61403264 and 61305098) andby the Natural Science Foundation of Guangdong Province(Project 2016A030310018) Grateful thanks go to Dr Ye Xian-Ming who gives considerable help by means of environmentsupport
14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
As we can see now the strategy for minimizing theenergy consumption of biped robots is finally formulated as aconstrained QP problem (see (19)ndash(22)) In the next sectionwe are going to solve this QP problem using neurodynamics
4 Solve the QP Problem forEnergy Optimization
First of all the QP problem described in (19)ndash(22) needs tobe converted to a LVI problem For this purpose 120594 and 120573are defined as the dual decision vectors corresponding to theequality constraint (20) and the inequality constraint (21)respectively As a result the primal-dual decision vector119910 andits upperlower bounds 119910plusmn are defined as follows
119910 fl [[[120591120594120573]]]
119910+ fl [[[[120585++120594++120594+]]]]
119910minus fl [[[[120585minusminus120594+minus120594+]]]] isin 119877
2119899+119897+119898(23)
where elements 120594+119894 ≫ 0 in 120594+ are defined sufficientlypositive to represent infinity for any 119894 for the convenience ofsimulation and hardware implementation of the operationThe convex set Ω made by primal-dual decision vector 119910 ispresented as Ω = 119910minus le 119910 le 119910+ Then the QP problem in(19)ndash(22) is equivalent to the following LVI problem
(119910 minus 119910lowast)119879 (119872119910lowast + 119901) ge 0 forall119910 isin Ω (24)
That is to say we need to find a vector 119910lowast isin Ω = 119910 | 119910minus le119910 le 119910+with a coefficient matrix119872 and a vector 119901 as follows119872 fl
[[[[119876 minus119860119879 119860119879ueq119860 0 0minus119860ueq 0 0
]]]] isin 119877(2119899+119897+119898)times(2119899+119897+119898)
119901 fl [[[[119888minus119861ueq]]]] isin 119877
(2119899+119897+119898)(25)
As a summary of this step a theorem and the correspondingproof are given below
Theorem 5 (see [21] (LVI formulation)) The QP problem in(19)ndash(22) is equivalent to the following LVI problem that isto find a vector 119910lowast isin Ω = 119910 | 119910minus le 119910 le 119910+ such that(119910 minus 119910lowast)119879(119872119910lowast + 119901) ge 0 forall119910 isin Ω where coefficients 119910plusmn119872and 119901 are defined in (24) and (23) respectively
Proof From [21] we know that the Lagrangian dual prob-lem of the QP problem in (19)ndash(22) is to maximizeinf120591isin1198772119899119871(120591 120594 Vminus V+) over 120594 Vminus ge 0 and V+ ge 0 where119871 (120591 120594 Vminus V+) = 2119899sum
119894=1
[121205911198942119876119894 + 119888119894120591119894 + 120594119894 (minus119860 119894120591119894 + 119894)+ 120573119894 (119860ueq 119894120591119894 minus 119861ueq 119894) + V119894minus (minus120591119894 + 120585119894minus)+ V119894+ (120591119894 minus 120585119894+)]
(26)
Note that function 119871(120591 120594 Vminus V+) is convex with given 120594 isin119877119897 Vminus isin 1198772119899 and V+ isin 1198772119899 Therefore the necessary andsufficient condition for a minimum is2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894120594119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0 (27)
Thus the dual problem of (19)ndash(22) can be derived as
maximize2119899sum119894=1
[121205911198942119876119894 + 119888119894120591119894 + 120594119894 (minus119860 119894120591119894 + 119894) + 120573119894 (119860ueq 119894120591119894 minus 119861ueq 119894) + V119894minus (minus120591119894 + 120585119894minus) + V119894+ (120591119894 minus 120585119894+)]subject to
2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894119910119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0120594119894 unrestricted V119894minus ge 0 V119894+ ge 0(28)
Multiplying both sides of (27) by 120591 we haveminus 2119899sum119894=1
1205911198942119876119894= 2119899sum119894=1
[120591119894119888119894 minus 120591119894119860 119894120594119894 + 120591119894119860ueq119894120573119894 + 120591119894 (minusV119894minus + V119894+)] (29)
Then the dual form can be rewritten as
maximize2119899sum119894=1
[minus121205911198942119876119894 + 119894120594119894 minus 119861ueq 119894120573119894 + 120585119894minusV119894minus minus 120585119894+V119894+]subject to
2119899sum119894=1
[119876119894120591119894 + 119888119894 minus 119860 119894120594119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+] = 0
6 Mathematical Problems in Engineering
120594119894 unrestricted V119894minus ge 0 V119894+ ge 0(30)
To obtain the optimum (120591lowast 120594lowast Vminuslowast V+lowast) of the primal prob-lem (see (19)ndash(22)) and its dual problem (see (30)) thenecessary and sufficient conditions are as follows
Primal feasibility
2119899sum119894=1
(119860 119894120591119894lowast minus 119894) = 0 (31)
2119899sum119894=1
(minus119860ueq 119894120591119894lowast + 119861ueq 119894) ge 02119899sum119894=1
120585119894minus le 2119899sum119894=1
120591119894lowast le 2119899sum119894=1
120585119894+ (32)
Dual feasibility
2119899sum119894=1
(119876119894120591119894 + 119888119894 minus 119860 119894119910119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+) = 0120594119894 unrestricted 120573119894 ge 0 V119894minus ge 0 V119894+ ge 0 (33)
Complementarity
2119899sum119894=1
120573119894lowast (minus119860ueq 119894120591119894lowast + 119861ueq 119894) = 0 (34)
2119899sum119894=1
V119894minuslowast (minus120591119894lowast + 120585119894minus) = 0 (35)
2119899sum119894=1
V119894+lowast (120591119894lowast minus 120585119894+) = 0 (36)
To simplify the above necessary and sufficient conditionsby defining Vlowast119894 = Vminuslowast119894 minus V+lowast119894 and considering (35)-(36) dualfeasibility constraint (33) becomes
2119899sum119894=1
(119876119894120591119894lowast + 119888119894 minus 119860 119894120594119894lowast + 119860ueq 119894120573119894lowast)= 2119899sum119894=1
V119894lowast
le 0 120591lowast119894 = 120585+119894= 0 120591lowast119894 isin (120585minus119894 120585+119894 )ge 0 120591lowast119894 = 120585minus119894 (37)
which is equal to the following LVI problem to find anoptimum 120591lowast isin Ω1 such that
2119899sum119894=1
(120591119894 minus 120591119894lowast) (119876119894120591119894lowast + 119888119894 minus 119860 119894120594119894lowast + 119860ueq 119894120573119894lowast) ge 0forall120591 isin Ω1 (38)
whereΩ1 = 120591 | 120585minus le 120591lowast le 120585+
In addition by defining Ω2 fl 120594 | 120594 isin 119877119897 we have thefollowing LVI for the equality constraint (31) to find 120594lowast isin Ω2such that
2119899sum119894=1
(120594119894 minus 120594119894lowast) (119860 119894120591119894lowast minus 119894) ge 0 forall120594 isin Ω2 (39)
Similarly by defining Ω3 = 120573 | 120573 isin 119877119898 we havethe following LVI for the inequality constraint (32) and theequality constraint (34) to find 120573lowast isin Ω3 such that2119899sum119894=1
(120573119894 minus 120573119894lowast) (minus119860ueq 119894120591119894lowast + 119861ueq 119894) ge 0 forall120573 isin Ω3 (40)
By taking the Cartesian product of the three sets Ω1Ω2 and Ω3 defined above we formulate the convex set Ωpresented in (24) as follows
Ω = Ω1 times Ω2 times Ω3 = 119910 = (120591119879 120594119879 120573119879)119879isin 119877(2119899+119897+119898) | 120585minus le 120591lowast le 120585+ 120594 unrestricted 120573 ge 0= 119910 =
[[[120591120594120573]]] isin 119877(2119899+119897+119898) |
[[[[120585minusminus120594+minus120594+]]]] le[[[120591120594120573]]]
le [[[[120585+120594+120594+]]]] = 119910 isin 119877
(2119899+119897+119898) | 119910minus le 119910 le 119910+ (41)
In consequence LVIs (38)ndash(40) can be combined into an LVIin the matrix form that is to find an optimum 119910lowast isin Ω suchthat 119910 = (120591119879 120594119879 120573119879)119879 isin Ω and([[[120591120594120573]]] minus [[[
120591lowast120594lowast120573lowast]]])119879
sdot ([[[[119876 minus119860119879 119860119879ueq119860 0 0minus119860ueq 0 0
]]]][[[120591lowast120594lowast120573lowast]]] +
[[[[119888minus119861ueq]]]])
ge 0 forall[[[120591120594120573]]] isin Ω
(42)
Contrasting the definitions of 119910plusmn in (23) and119872 and 119901 in (25)the above LVIs (see (42)) are exactly in the compact form (see(25)) as the equivalence ofQPproblem in (19)ndash(22)Theproofis then completed
On the other hand from [20] it is known that LVI in(25) is equivalent to the following system of piecewise linearequations 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 = 0 (43)
Mathematical Problems in Engineering 7
where 119875Ω(sdot) is a piecewise linear projection operator with the119894th projection element of 119875Ω(119910) = [119875Ω(1199101) 119875Ω(1199102119899+119897+119898)]119879being defined as
119875Ω (119910119894) = 119910minus119894 if 119910119894 lt 119910minus119894119910119894 if 119910minus119894 le 119910119894 le 119910+119894 119910+119894 if 119910119894 gt 119910+119894 forall119894 isin 1 2119899 + 119897 + 119898
(44)
To solve linear projection equation (43) the dual dynamicalsystem design approach presented in [20] is adopted tobuild a dynamical system Considering the asymmetric 119872a primal-dual neural network is developed as follows to solve(43) 119910 = 120574 (119868 +119872119879) 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (45)
where 120574 gt 0 is a design parameter used to scale theconvergence rate of the system The convergence rate isimproved when the value of 120574 is increased Furthermore byreplacing 120574(119868+119872119879)with 120572 the dynamical system (45) can berewritten as follows119910 = 120572 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (46)
where 120572 is a positive design parameter for the convergencerate of the PDNN (see (46)) About the convergence analysisof the above-mentioned primal-dual dynamical solver thereis a theorem presented as follows
Theorem 6 (see [22]) Starting from any initial state thestate vector 119910(119905) of primal-dual dynamical system (45) isconvergent to an equilibrium point 119910lowast of which the first 2119899elements constitute the optimal solution 120591lowast to the quadraticprogramming problem in (19)ndash(22) Moreover the exponentialconvergence can be achieved if there exists a constant 120588 gt 0such that 1003817100381710038171003817119910 minus 119875Ω (119910 minus (119872119910 + 119901))100381710038171003817100381722 ge 120588 1003817100381710038171003817119910 minus 119910lowast100381710038171003817100381722 (47)
Remark 7 As a primal-dual dynamical solver primal-dualneural networks can efficiently generate exact optimal solu-tions [21] Furthermore compared to dual neural networksthe LVI- (linear variational inequality-) based primal-dualneural networks do not entail any matrix inversion onlineso that they can reduce the computational time greatly [20]Therefore a LVI-based primal-dual neural network is appliedto perform theminimization of the energy consumptionwithequality and inequality constraints for biped robots in thiswork
5 Neurodynamics-Based EnergyOptimization Control
Over the past two decades much progress has been madein the control of robot systems based on various controltechniques In [30] two novel robust adaptive PID control
schemes are proposed to solve the strong nonlinearity andcoupling problems in robot manipulator control In [31] asupport vector regression-based control system is proposedto learn the external disturbances and increase the zero-moment-point stability margin of humanoid robots In [32]a kinematics open-loop control system of hexapod robot withan embedded digital signal controller is proposed In [33] anopen-loop controller is implemented on field programmablegate array (FPGA) of the robot Experimental results revealthe viability of the proposed controller
On the other hand many mature techniques have beenused to track the planned trajectories with a certain controlstrategy In [34] a trajectory generator and a joint trajectorytracking controller are designed The proposed combinationis successfully implemented and the robot is able to walkat 011ms Literature [35] considers the problem of jointtrajectory control with oscillations cancelling for planarmultilink flexible manipulators A feed-forward torque isdesigned to preset the elastic coordinates of the system sothat the controller is able to drive the arm along the desiredtrajectory In [36] in order to reduce gait planning andto get a good tracking performance master-slaver dual-legcoordination control was proposed for the biped robot withheterogeneous legs In [37] an open-closed-loop iterativelearning control algorithm with angle correction term isproposed which uses the error signal and the deviation oftwo adjacent error signals to adjust itself
In this work the proposed neurodynamics-basedmethodis an open-loop controller As shown in Figure 1 controlmethod based on energy-efficiency optimization is proposedto obtain the trade-off between the force-moment equilib-rium and energy efficiency for biped walking by minimizingthe energy-related cost function while guaranteeing physicalconstraints There are two parts in the control system QPproblem for energy optimization and a LVI-based primal-dual neural network for solving the QP problemThe controlobject of the proposedmethod is to follow the planned trajec-tories for the biped joints using optimal joint torques deducedby the proposed controller The inputs of the controllerinclude the planned trajectories for the biped joints theforce-moment equilibrium equation of biped robot frictioncoefficient between the ground and the robot and physicalparameters of the motors equipped on the robotThe outputsof the controller are the optimal joint torques for the bipedjoints which are deduced using a LVI-based primal-dualneural network
Firstly the strategy for optimizing the energy efficiencyis formulated as a constrained QP problem Three importantphysical constraints for the biped system are formulated inthis QP problem for energy optimization of biped walkingrobots
Secondly a neurodynamics-based solver is presented tosolve the proposed constrained optimization problem
Thirdly joint trajectories are planned for the biped robotThe planned trajectories provide parameters for the force-moment equilibrium equation of biped robot which is oneof the constraints of the energy optimization QP problem Sothe biped robot is able to make the step and does not fall
8 Mathematical Problems in Engineering
QP problem for energy optimization of biped robots
(see equations (19)ndash(22))
LVI-based primal-dual neural network (PDNN) (see equation (46))
Biped robot
Q
c
p
y
+
+
M
Bipedwalking
Gaitplanning
plusmn
plusmn
PΩ(middot)
I minus M
y
lowast
int
minus le le +
AOK le BuK
st A = W
GCH (12)TQ + GR(cT 0)
minus
minus
[c minusW BOK]T
sum
sum
[[[[[
Q minusAT ATOK
A 0 0
minusAOK 0 0
]]]]]
Figure 1 Neurodynamics-based energy optimization strategy for biped robots
B y
x
z
1
2
3
4
5
6
LNB
LH
LMB
Figure 2 Simplified model of the biped robot
Table 1 Main parameters of the biped robot
Link Length (m) Mass (kg) Inertia moment (kgsdotm2)Torso 0175 1060 001623Thigh 0130 0075 (times2) 000037 (times2)Shank 0130 0075 (times2) 000037 (times2)Foot 0020 0060 (times2) 000004 (times2)6 Simulation Research
To verify the effectiveness of the proposed energy-efficiencycontrol method some simulations are implemented in thissection Matlab is used to model the biped robot and thecontroller
61 Structure and Parameters of the Biped Robot Considera planar biped robot with 6 degrees of freedom shown inFigure 2 The robot consists of one torso and two legs Themain parameters of the biped robot can be found in Table 1
Typical gait is planned for this simulated biped robot towalk on the horizontal ground In this work it is assumed thatthe torso of the biped robotmoves at a constant velocitywith aconstant heightTheCOGof the simplifiedmodel is located atthe geometric center of the torsoThe basic coordinate frame
with its origin at the COG is defined as a body-fixed frameThe whole walking period of the biped robot is considered tobe composed of a single-support phase and an instantaneousdouble-support phase The supporting foot is assumed toremain in full contact with the ground during the single-support phase The trajectories of the ankles and the hips aregiven as follows119910119886 (119896) = 119886120587 2120587119873 + 1119896 minus sin( 2120587119873 + 1119896)
119911119886 (119896) = 119889120587 1 minus cos( 2120587119873 + 1119896)119910ℎ (119896) = 12119910119886 (119896) + 1198862119911ℎ (119896) = 12119911119886 (119896) + 119871 th + 119871 sh minus 1198892 (48)
where 119910ℎ(119896) and 119911ℎ(119896) denote the position of the hip and119910119886(119896) and 119911119886(119896) denote the position of the swinging anklejoint at the 119896th sample 119886 is the walking step length and 119889is the height of swinging ankle 119873 + 1 is the total samplingnumber in a walking cycle 119879 119871 th and 119871 sh are the lengths oflower limbs Here 119889 = 002m and 119879 = 1 s62 Parameters for the QP Problem and the Neurodynamics-Based Solver For the parameters of the constrained QPproblem in (19)ndash(22) the parameters of the motors aredetermined by the motors that are equipped in the robotHere we take a set of typicalmotor parameters as an exampleThe electric resistance of the motor 119877 = 917 (Ω) torqueconstant 119896119872 = 168 times 10minus3 (NmA) gear reduction rate119873 = 200 and the joint gearrsquos mechanical efficiency 120578 = 07Submitting all the above-mentioned parameters to (9) wehave 119876 = 3321198686times6 and 119888 = 143[ 12057911 12057912 12057913 12057921 12057922 12057923]119879where 120579119894 = [ 1205791198941 1205791198942 1205791198943]119879 is the joint velocity vector of the119894th leg Here the joint velocity can be calculated using thegait planned in Section 61 Consider the 119894th leg of a bipedrobot 120579119894(119896 + 1) = [120579119894(119896 + 1) minus 120579119894(119896)]Δ119905 119894 = 1 2 where120579119894(119896 + 1) denotes the joint velocity at the (119896 + 1)th sampleand Δ119905 is the sampling interval The smaller the value of Δ119905is the more accurate but the more computationally intensivethe joint velocity is [38]
Mathematical Problems in Engineering 9
Input layer Hidden layer Output layer
u8 = 1
u1 = 1
u7 = 7
uM = 7
11
12
ML
11
12
LJ
S( Msumm=1
m1um)
S( Msumm=1
m2um)
S( Msumm=1
mLum)
J =Lsuml=1
lJ middot1
(1 + eminussum=1 u)
1 =Lsuml=1
l1 middot1
(1 + eminussum=1 u)
Figure 3 Structure of the three-layered NN
For the constraint condition of force-moment equilib-rium equation the Coulomb friction coefficient depends onthe ground environmentHerewe take120583 = 06 as an exampleThe inertia matrix of the leg 119863119894 the centrifugal and Coriolisterms ℎ119894 and the gravity terms 119892119894 in the dynamic equationcan be calculated using the method shown in [39]
Considering the physical limits of the motors we have120585+ = minus120585minus = [12 12]119879For the neurodynamics-based solver the positive design
parameter for the convergence rate of the PDNN is 120572 = 01which is determined using the trial-and-error method
63 Biped Walking via Different Controllers The proposedcontrol method is tested on the control of the biped robotmentioned above by simulation experiments The perfor-mances of the proposed NEO are compared with those of theSVM control methods [40 41] and NN control methods
For the SVM controller the parameters include a penaltycoefficient 119862 = 1000 degree of the polynomial kernels 119902 = 2width of the RBF kernels 120590 = 015 and mixed coefficientof the mixed kernels 119886 = 095 When training the bipeddynamic we sample the joint variables in the period of 119879 =1 s and let the sampling interval be Δ119905 = 0005 s That isto say there are 200 sampling points in a single walkingperiod the desired sample set satisfying the ZMP criterionis (Θ1 1205911) (Θ200 120591200)
On the other side for comparison with the proposedNEO a three-layered backpropagation (BP) NN is built tocontrol the biped robot Details of the NN are introduced asfollows
Layer 1 (Input Layer) In this layer the input signal is directlytransferred to the next layer that is
119874(1)119898 = 119906119898 (49)
where 119906119898 = Θ = [1205791 1205792 1205796 1205791 1205792 1205796]119879 and 119898 =1 119872 (119872 = 12) is the input variable 119874(1)119898 is the outputof the input layer
Layer 2 (Hidden Layer) Each node in the hidden layerperforms a transfer operation using a Sigmoid function thatis
119874(2)119897 = 119878( 119872sum119898=1
120575119898119897119906119898) = 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (50)
where 119874(2)119897 is the output of the hidden layer 119878(sdot) is a Sigmoidfunction 119897 = 1 119871 is the index of the hidden unitsThe number of the hidden units is designed as 119871 = 20here using the trial-and-error method 120575119898119897 is the connectionweight between the input layer and the hidden layer Theinitial values of the connection weights can be selectedrandomly and different initial values could lead to differentperformance of the NN
Layer 3 (Output Layer) This layer performs the calculationfor the output of the whole network
120591119895 = 119871sum119897=1
120573119895119897 sdot 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (51)
where 120591119895 is the control torque for the 119895th biped joint 119895 =1 119869 (119869 = 6) 120573119895119897 is the connection weight between thehidden layer and the output layerThe initial values of 120573119895119897 canbe selected randomly
By using BP algorithm the NN is trained offline with the200 desired samples for 100 times The structure of the NN isshown in Figure 3
The proposed control method and the above-mentionedtwo intelligent methods are adopted to control the simulatedbiped robot respectively As we can see from Figures 4-5all the three methods can realize the planned biped walking
10 Mathematical Problems in Engineering
minus005
0
005
01
015
02
025
03
035
04
045z
(m)
015 02 025 03 035 04 045 0501x (m)
(a)
015 02 025 03 035 04 045 0501x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 0501x (m)
(c)
Figure 4 Biped walking using different controllers when the step length is 018m (a) SVM (b) NN and (c) the proposed NEO
Energy consumption trajectories are shown in Figures 6-7As shown in the figures the proposed NEO needs less energythan the other methods due to the proposed energy-basedoptimal control For example when the energy consumptionof all the joints is 15979 J for the proposed NEO the energyconsumption is 40910 J for the NN and 31168 J for the SVM(see Table 2) Furthermore the proposed NEO always needsless energy than the other two methods when different bipedmotions are considered (Motion 1 the step length is 018mMotion 2 the step length is 020m) At the same time theSVM controller exhibits greater energy efficiency comparedwith the NN controller The possible cause is that the SVM ismore efficient in learning the energy-efficient controller usinglimited samples
Remark 8 In the simulation section the robotrsquos joint trajec-tories are predefinedThis paper makes contribution by opti-mizing the joint torques to decrease the energy consumptionwithout changing the biped gaits
Table 2 Energy consumption comparisons with other methods
Method Step length (m) E (J)NN
01840910
SVM 31168The proposed NEO 15979NN
02083164
SVM 57229The proposed NEO 31400
Joint torques for different controllers when the step lengthis 020m are shown in Figures 8ndash13 As shown in thefigures the proposed NEO strategy exhibits smaller drivingtorques compared with the NN method and SVM methodIt is because we deduce the optimal joint torque for thebiped robot according to the proposed energy optimizationproblem As a result torque costs of the biped joints are
Mathematical Problems in Engineering 11
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(a)
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 05 055 0601x (m)
(c)
Figure 5 Biped walking using different controllers when the step length is 020m (a) SVM (b) NN and (c) the proposed NEO
NNSVMThe proposed NEO
0
100
200
300
400
500
600
700
800
900
Ener
gy co
nsum
ptio
n (J
)
02 04 06 08 10Time (s)
Figure 6 Energy consumption of the robot joints for different controllers when the step length is 018m
12 Mathematical Problems in Engineering
NNSVMThe proposed NEO
02 04 06 08 10Time (s)
0
200
400
600
800
1000
1200
1400
1600
1800
Ener
gy co
nsum
ptio
n (J
)
Figure 7 Energy consumption of the robot joints for differentcontrollers when the step length is 020m
50 100 150 2000Serial number of the samples
5
6
7
8
9
10
11
12
13
14
15
Join
t tor
que f
or 1
(Nm
)
NNSVMThe proposed NEO
Figure 8 Joint torque for 1205791 deduced by different control methods
reduced remarkably This contributes to the effectivenessof the proposed NEO strategy in terms of reducing theenergy consumption of biped robots At the same time theproposed NEO strategy minimizes the energy consumptionand guarantees three necessary constraints simultaneouslyTherefore the force-moment equilibrium equation of bipedrobots is guaranteed and the biped robot does not fall
On the other hand the SVM controller exhibits greaterenergy efficiency (realize the same motion with smaller driv-ing torques) compared with the NN controller The possiblecause is that the number of the learning samples for the NN
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
3
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 2
(Nm
)Figure 9 Joint torque for 1205792 deduced by different control methods
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 3
(Nm
)
Figure 10 Joint torque for 1205793 deduced by different control methods
controllers is not large enough in this work Conventionalmachine learning methods such as NN use empirical riskminimization (ERM) based on infinite samples which is dis-advantageous to the learning control based on small samplesizes for biped robots The SVM is direct implementationof the structural risk minimization (SRM) principle Thisdifference makes SVM more efficient in resolving the small-sample-sizes learning problems
7 Conclusions
To build a more practical objective function for the energyoptimization of biped robots three important constraints are
Mathematical Problems in Engineering 13
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus12
minus10
minus8
minus6
minus4
minus2
0
Join
t tor
que f
or 4
(Nm
)
Figure 11 Joint torque for 1205794 deduced by different control methods
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus10
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Join
t tor
que f
or 5
(Nm
)
Figure 12 Joint torque for 1205795 deduced by different control methods
incorporated into the optimal controller for biped robotsSimulation results demonstrate that the proposed NEO strat-egy effectively decreases the energy consumption of bipedwalking robot In addition the proposed strategy can guaran-tee the force-moment equilibrium equation and the physicallimits of the motors Coulomb friction is applied between theleg and the ground by setting a friction coefficient The bipedrobot can provide optimal joint torques without slippage ortipping over
It is worth noting that most of the existing algorithmsrealize the energy minimization via optimizing gait param-eters However gait parameters such as foot trajectoriesand the trajectories of the COG are not the only aspect
NNSVMThe proposed NEO
1
2
3
4
5
6
7
8
9
10
Join
t tor
que f
or 6
(Nm
)
50 100 150 2000Serial number of the samples
Figure 13 Joint torque for 1205796 deduced by different control methods
to be concerned Other factors such as the forces andmoments acting on the biped robot can also impose onenergy consumption of the biped robot to a large extent Forexample people walking in the mud or in a gale usually feelmore tiredTherefore when the foot trajectories and theCOGtrajectories are determined optimizing the torques of eachjoint is significant for the energy optimization of the wholebiped system This point is verified by simulations and theresults of this work are significant
In this work the proposed neurodynamics-basedmethodis an open-loop controller In the simulation experiments wedo not introduce any error accumulation during the bipedwalking So the simulated robot is able to follow the plannedtrajectories and does not fall However for a real robotsystem there must be error accumulation introduced by themechanical devices In this situation the biped robot tends todeviate from the reference trajectory if there is no feedbackand correction for error compensating Consequently futureworks will include the design of closed-loop controllerswhich are more suitable for real robot systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (Projects 61403264 and 61305098) andby the Natural Science Foundation of Guangdong Province(Project 2016A030310018) Grateful thanks go to Dr Ye Xian-Ming who gives considerable help by means of environmentsupport
14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
120594119894 unrestricted V119894minus ge 0 V119894+ ge 0(30)
To obtain the optimum (120591lowast 120594lowast Vminuslowast V+lowast) of the primal prob-lem (see (19)ndash(22)) and its dual problem (see (30)) thenecessary and sufficient conditions are as follows
Primal feasibility
2119899sum119894=1
(119860 119894120591119894lowast minus 119894) = 0 (31)
2119899sum119894=1
(minus119860ueq 119894120591119894lowast + 119861ueq 119894) ge 02119899sum119894=1
120585119894minus le 2119899sum119894=1
120591119894lowast le 2119899sum119894=1
120585119894+ (32)
Dual feasibility
2119899sum119894=1
(119876119894120591119894 + 119888119894 minus 119860 119894119910119894 + 119860ueq 119894120573119894 minus V119894minus + V119894+) = 0120594119894 unrestricted 120573119894 ge 0 V119894minus ge 0 V119894+ ge 0 (33)
Complementarity
2119899sum119894=1
120573119894lowast (minus119860ueq 119894120591119894lowast + 119861ueq 119894) = 0 (34)
2119899sum119894=1
V119894minuslowast (minus120591119894lowast + 120585119894minus) = 0 (35)
2119899sum119894=1
V119894+lowast (120591119894lowast minus 120585119894+) = 0 (36)
To simplify the above necessary and sufficient conditionsby defining Vlowast119894 = Vminuslowast119894 minus V+lowast119894 and considering (35)-(36) dualfeasibility constraint (33) becomes
2119899sum119894=1
(119876119894120591119894lowast + 119888119894 minus 119860 119894120594119894lowast + 119860ueq 119894120573119894lowast)= 2119899sum119894=1
V119894lowast
le 0 120591lowast119894 = 120585+119894= 0 120591lowast119894 isin (120585minus119894 120585+119894 )ge 0 120591lowast119894 = 120585minus119894 (37)
which is equal to the following LVI problem to find anoptimum 120591lowast isin Ω1 such that
2119899sum119894=1
(120591119894 minus 120591119894lowast) (119876119894120591119894lowast + 119888119894 minus 119860 119894120594119894lowast + 119860ueq 119894120573119894lowast) ge 0forall120591 isin Ω1 (38)
whereΩ1 = 120591 | 120585minus le 120591lowast le 120585+
In addition by defining Ω2 fl 120594 | 120594 isin 119877119897 we have thefollowing LVI for the equality constraint (31) to find 120594lowast isin Ω2such that
2119899sum119894=1
(120594119894 minus 120594119894lowast) (119860 119894120591119894lowast minus 119894) ge 0 forall120594 isin Ω2 (39)
Similarly by defining Ω3 = 120573 | 120573 isin 119877119898 we havethe following LVI for the inequality constraint (32) and theequality constraint (34) to find 120573lowast isin Ω3 such that2119899sum119894=1
(120573119894 minus 120573119894lowast) (minus119860ueq 119894120591119894lowast + 119861ueq 119894) ge 0 forall120573 isin Ω3 (40)
By taking the Cartesian product of the three sets Ω1Ω2 and Ω3 defined above we formulate the convex set Ωpresented in (24) as follows
Ω = Ω1 times Ω2 times Ω3 = 119910 = (120591119879 120594119879 120573119879)119879isin 119877(2119899+119897+119898) | 120585minus le 120591lowast le 120585+ 120594 unrestricted 120573 ge 0= 119910 =
[[[120591120594120573]]] isin 119877(2119899+119897+119898) |
[[[[120585minusminus120594+minus120594+]]]] le[[[120591120594120573]]]
le [[[[120585+120594+120594+]]]] = 119910 isin 119877
(2119899+119897+119898) | 119910minus le 119910 le 119910+ (41)
In consequence LVIs (38)ndash(40) can be combined into an LVIin the matrix form that is to find an optimum 119910lowast isin Ω suchthat 119910 = (120591119879 120594119879 120573119879)119879 isin Ω and([[[120591120594120573]]] minus [[[
120591lowast120594lowast120573lowast]]])119879
sdot ([[[[119876 minus119860119879 119860119879ueq119860 0 0minus119860ueq 0 0
]]]][[[120591lowast120594lowast120573lowast]]] +
[[[[119888minus119861ueq]]]])
ge 0 forall[[[120591120594120573]]] isin Ω
(42)
Contrasting the definitions of 119910plusmn in (23) and119872 and 119901 in (25)the above LVIs (see (42)) are exactly in the compact form (see(25)) as the equivalence ofQPproblem in (19)ndash(22)Theproofis then completed
On the other hand from [20] it is known that LVI in(25) is equivalent to the following system of piecewise linearequations 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 = 0 (43)
Mathematical Problems in Engineering 7
where 119875Ω(sdot) is a piecewise linear projection operator with the119894th projection element of 119875Ω(119910) = [119875Ω(1199101) 119875Ω(1199102119899+119897+119898)]119879being defined as
119875Ω (119910119894) = 119910minus119894 if 119910119894 lt 119910minus119894119910119894 if 119910minus119894 le 119910119894 le 119910+119894 119910+119894 if 119910119894 gt 119910+119894 forall119894 isin 1 2119899 + 119897 + 119898
(44)
To solve linear projection equation (43) the dual dynamicalsystem design approach presented in [20] is adopted tobuild a dynamical system Considering the asymmetric 119872a primal-dual neural network is developed as follows to solve(43) 119910 = 120574 (119868 +119872119879) 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (45)
where 120574 gt 0 is a design parameter used to scale theconvergence rate of the system The convergence rate isimproved when the value of 120574 is increased Furthermore byreplacing 120574(119868+119872119879)with 120572 the dynamical system (45) can berewritten as follows119910 = 120572 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (46)
where 120572 is a positive design parameter for the convergencerate of the PDNN (see (46)) About the convergence analysisof the above-mentioned primal-dual dynamical solver thereis a theorem presented as follows
Theorem 6 (see [22]) Starting from any initial state thestate vector 119910(119905) of primal-dual dynamical system (45) isconvergent to an equilibrium point 119910lowast of which the first 2119899elements constitute the optimal solution 120591lowast to the quadraticprogramming problem in (19)ndash(22) Moreover the exponentialconvergence can be achieved if there exists a constant 120588 gt 0such that 1003817100381710038171003817119910 minus 119875Ω (119910 minus (119872119910 + 119901))100381710038171003817100381722 ge 120588 1003817100381710038171003817119910 minus 119910lowast100381710038171003817100381722 (47)
Remark 7 As a primal-dual dynamical solver primal-dualneural networks can efficiently generate exact optimal solu-tions [21] Furthermore compared to dual neural networksthe LVI- (linear variational inequality-) based primal-dualneural networks do not entail any matrix inversion onlineso that they can reduce the computational time greatly [20]Therefore a LVI-based primal-dual neural network is appliedto perform theminimization of the energy consumptionwithequality and inequality constraints for biped robots in thiswork
5 Neurodynamics-Based EnergyOptimization Control
Over the past two decades much progress has been madein the control of robot systems based on various controltechniques In [30] two novel robust adaptive PID control
schemes are proposed to solve the strong nonlinearity andcoupling problems in robot manipulator control In [31] asupport vector regression-based control system is proposedto learn the external disturbances and increase the zero-moment-point stability margin of humanoid robots In [32]a kinematics open-loop control system of hexapod robot withan embedded digital signal controller is proposed In [33] anopen-loop controller is implemented on field programmablegate array (FPGA) of the robot Experimental results revealthe viability of the proposed controller
On the other hand many mature techniques have beenused to track the planned trajectories with a certain controlstrategy In [34] a trajectory generator and a joint trajectorytracking controller are designed The proposed combinationis successfully implemented and the robot is able to walkat 011ms Literature [35] considers the problem of jointtrajectory control with oscillations cancelling for planarmultilink flexible manipulators A feed-forward torque isdesigned to preset the elastic coordinates of the system sothat the controller is able to drive the arm along the desiredtrajectory In [36] in order to reduce gait planning andto get a good tracking performance master-slaver dual-legcoordination control was proposed for the biped robot withheterogeneous legs In [37] an open-closed-loop iterativelearning control algorithm with angle correction term isproposed which uses the error signal and the deviation oftwo adjacent error signals to adjust itself
In this work the proposed neurodynamics-basedmethodis an open-loop controller As shown in Figure 1 controlmethod based on energy-efficiency optimization is proposedto obtain the trade-off between the force-moment equilib-rium and energy efficiency for biped walking by minimizingthe energy-related cost function while guaranteeing physicalconstraints There are two parts in the control system QPproblem for energy optimization and a LVI-based primal-dual neural network for solving the QP problemThe controlobject of the proposedmethod is to follow the planned trajec-tories for the biped joints using optimal joint torques deducedby the proposed controller The inputs of the controllerinclude the planned trajectories for the biped joints theforce-moment equilibrium equation of biped robot frictioncoefficient between the ground and the robot and physicalparameters of the motors equipped on the robotThe outputsof the controller are the optimal joint torques for the bipedjoints which are deduced using a LVI-based primal-dualneural network
Firstly the strategy for optimizing the energy efficiencyis formulated as a constrained QP problem Three importantphysical constraints for the biped system are formulated inthis QP problem for energy optimization of biped walkingrobots
Secondly a neurodynamics-based solver is presented tosolve the proposed constrained optimization problem
Thirdly joint trajectories are planned for the biped robotThe planned trajectories provide parameters for the force-moment equilibrium equation of biped robot which is oneof the constraints of the energy optimization QP problem Sothe biped robot is able to make the step and does not fall
8 Mathematical Problems in Engineering
QP problem for energy optimization of biped robots
(see equations (19)ndash(22))
LVI-based primal-dual neural network (PDNN) (see equation (46))
Biped robot
Q
c
p
y
+
+
M
Bipedwalking
Gaitplanning
plusmn
plusmn
PΩ(middot)
I minus M
y
lowast
int
minus le le +
AOK le BuK
st A = W
GCH (12)TQ + GR(cT 0)
minus
minus
[c minusW BOK]T
sum
sum
[[[[[
Q minusAT ATOK
A 0 0
minusAOK 0 0
]]]]]
Figure 1 Neurodynamics-based energy optimization strategy for biped robots
B y
x
z
1
2
3
4
5
6
LNB
LH
LMB
Figure 2 Simplified model of the biped robot
Table 1 Main parameters of the biped robot
Link Length (m) Mass (kg) Inertia moment (kgsdotm2)Torso 0175 1060 001623Thigh 0130 0075 (times2) 000037 (times2)Shank 0130 0075 (times2) 000037 (times2)Foot 0020 0060 (times2) 000004 (times2)6 Simulation Research
To verify the effectiveness of the proposed energy-efficiencycontrol method some simulations are implemented in thissection Matlab is used to model the biped robot and thecontroller
61 Structure and Parameters of the Biped Robot Considera planar biped robot with 6 degrees of freedom shown inFigure 2 The robot consists of one torso and two legs Themain parameters of the biped robot can be found in Table 1
Typical gait is planned for this simulated biped robot towalk on the horizontal ground In this work it is assumed thatthe torso of the biped robotmoves at a constant velocitywith aconstant heightTheCOGof the simplifiedmodel is located atthe geometric center of the torsoThe basic coordinate frame
with its origin at the COG is defined as a body-fixed frameThe whole walking period of the biped robot is considered tobe composed of a single-support phase and an instantaneousdouble-support phase The supporting foot is assumed toremain in full contact with the ground during the single-support phase The trajectories of the ankles and the hips aregiven as follows119910119886 (119896) = 119886120587 2120587119873 + 1119896 minus sin( 2120587119873 + 1119896)
119911119886 (119896) = 119889120587 1 minus cos( 2120587119873 + 1119896)119910ℎ (119896) = 12119910119886 (119896) + 1198862119911ℎ (119896) = 12119911119886 (119896) + 119871 th + 119871 sh minus 1198892 (48)
where 119910ℎ(119896) and 119911ℎ(119896) denote the position of the hip and119910119886(119896) and 119911119886(119896) denote the position of the swinging anklejoint at the 119896th sample 119886 is the walking step length and 119889is the height of swinging ankle 119873 + 1 is the total samplingnumber in a walking cycle 119879 119871 th and 119871 sh are the lengths oflower limbs Here 119889 = 002m and 119879 = 1 s62 Parameters for the QP Problem and the Neurodynamics-Based Solver For the parameters of the constrained QPproblem in (19)ndash(22) the parameters of the motors aredetermined by the motors that are equipped in the robotHere we take a set of typicalmotor parameters as an exampleThe electric resistance of the motor 119877 = 917 (Ω) torqueconstant 119896119872 = 168 times 10minus3 (NmA) gear reduction rate119873 = 200 and the joint gearrsquos mechanical efficiency 120578 = 07Submitting all the above-mentioned parameters to (9) wehave 119876 = 3321198686times6 and 119888 = 143[ 12057911 12057912 12057913 12057921 12057922 12057923]119879where 120579119894 = [ 1205791198941 1205791198942 1205791198943]119879 is the joint velocity vector of the119894th leg Here the joint velocity can be calculated using thegait planned in Section 61 Consider the 119894th leg of a bipedrobot 120579119894(119896 + 1) = [120579119894(119896 + 1) minus 120579119894(119896)]Δ119905 119894 = 1 2 where120579119894(119896 + 1) denotes the joint velocity at the (119896 + 1)th sampleand Δ119905 is the sampling interval The smaller the value of Δ119905is the more accurate but the more computationally intensivethe joint velocity is [38]
Mathematical Problems in Engineering 9
Input layer Hidden layer Output layer
u8 = 1
u1 = 1
u7 = 7
uM = 7
11
12
ML
11
12
LJ
S( Msumm=1
m1um)
S( Msumm=1
m2um)
S( Msumm=1
mLum)
J =Lsuml=1
lJ middot1
(1 + eminussum=1 u)
1 =Lsuml=1
l1 middot1
(1 + eminussum=1 u)
Figure 3 Structure of the three-layered NN
For the constraint condition of force-moment equilib-rium equation the Coulomb friction coefficient depends onthe ground environmentHerewe take120583 = 06 as an exampleThe inertia matrix of the leg 119863119894 the centrifugal and Coriolisterms ℎ119894 and the gravity terms 119892119894 in the dynamic equationcan be calculated using the method shown in [39]
Considering the physical limits of the motors we have120585+ = minus120585minus = [12 12]119879For the neurodynamics-based solver the positive design
parameter for the convergence rate of the PDNN is 120572 = 01which is determined using the trial-and-error method
63 Biped Walking via Different Controllers The proposedcontrol method is tested on the control of the biped robotmentioned above by simulation experiments The perfor-mances of the proposed NEO are compared with those of theSVM control methods [40 41] and NN control methods
For the SVM controller the parameters include a penaltycoefficient 119862 = 1000 degree of the polynomial kernels 119902 = 2width of the RBF kernels 120590 = 015 and mixed coefficientof the mixed kernels 119886 = 095 When training the bipeddynamic we sample the joint variables in the period of 119879 =1 s and let the sampling interval be Δ119905 = 0005 s That isto say there are 200 sampling points in a single walkingperiod the desired sample set satisfying the ZMP criterionis (Θ1 1205911) (Θ200 120591200)
On the other side for comparison with the proposedNEO a three-layered backpropagation (BP) NN is built tocontrol the biped robot Details of the NN are introduced asfollows
Layer 1 (Input Layer) In this layer the input signal is directlytransferred to the next layer that is
119874(1)119898 = 119906119898 (49)
where 119906119898 = Θ = [1205791 1205792 1205796 1205791 1205792 1205796]119879 and 119898 =1 119872 (119872 = 12) is the input variable 119874(1)119898 is the outputof the input layer
Layer 2 (Hidden Layer) Each node in the hidden layerperforms a transfer operation using a Sigmoid function thatis
119874(2)119897 = 119878( 119872sum119898=1
120575119898119897119906119898) = 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (50)
where 119874(2)119897 is the output of the hidden layer 119878(sdot) is a Sigmoidfunction 119897 = 1 119871 is the index of the hidden unitsThe number of the hidden units is designed as 119871 = 20here using the trial-and-error method 120575119898119897 is the connectionweight between the input layer and the hidden layer Theinitial values of the connection weights can be selectedrandomly and different initial values could lead to differentperformance of the NN
Layer 3 (Output Layer) This layer performs the calculationfor the output of the whole network
120591119895 = 119871sum119897=1
120573119895119897 sdot 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (51)
where 120591119895 is the control torque for the 119895th biped joint 119895 =1 119869 (119869 = 6) 120573119895119897 is the connection weight between thehidden layer and the output layerThe initial values of 120573119895119897 canbe selected randomly
By using BP algorithm the NN is trained offline with the200 desired samples for 100 times The structure of the NN isshown in Figure 3
The proposed control method and the above-mentionedtwo intelligent methods are adopted to control the simulatedbiped robot respectively As we can see from Figures 4-5all the three methods can realize the planned biped walking
10 Mathematical Problems in Engineering
minus005
0
005
01
015
02
025
03
035
04
045z
(m)
015 02 025 03 035 04 045 0501x (m)
(a)
015 02 025 03 035 04 045 0501x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 0501x (m)
(c)
Figure 4 Biped walking using different controllers when the step length is 018m (a) SVM (b) NN and (c) the proposed NEO
Energy consumption trajectories are shown in Figures 6-7As shown in the figures the proposed NEO needs less energythan the other methods due to the proposed energy-basedoptimal control For example when the energy consumptionof all the joints is 15979 J for the proposed NEO the energyconsumption is 40910 J for the NN and 31168 J for the SVM(see Table 2) Furthermore the proposed NEO always needsless energy than the other two methods when different bipedmotions are considered (Motion 1 the step length is 018mMotion 2 the step length is 020m) At the same time theSVM controller exhibits greater energy efficiency comparedwith the NN controller The possible cause is that the SVM ismore efficient in learning the energy-efficient controller usinglimited samples
Remark 8 In the simulation section the robotrsquos joint trajec-tories are predefinedThis paper makes contribution by opti-mizing the joint torques to decrease the energy consumptionwithout changing the biped gaits
Table 2 Energy consumption comparisons with other methods
Method Step length (m) E (J)NN
01840910
SVM 31168The proposed NEO 15979NN
02083164
SVM 57229The proposed NEO 31400
Joint torques for different controllers when the step lengthis 020m are shown in Figures 8ndash13 As shown in thefigures the proposed NEO strategy exhibits smaller drivingtorques compared with the NN method and SVM methodIt is because we deduce the optimal joint torque for thebiped robot according to the proposed energy optimizationproblem As a result torque costs of the biped joints are
Mathematical Problems in Engineering 11
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(a)
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 05 055 0601x (m)
(c)
Figure 5 Biped walking using different controllers when the step length is 020m (a) SVM (b) NN and (c) the proposed NEO
NNSVMThe proposed NEO
0
100
200
300
400
500
600
700
800
900
Ener
gy co
nsum
ptio
n (J
)
02 04 06 08 10Time (s)
Figure 6 Energy consumption of the robot joints for different controllers when the step length is 018m
12 Mathematical Problems in Engineering
NNSVMThe proposed NEO
02 04 06 08 10Time (s)
0
200
400
600
800
1000
1200
1400
1600
1800
Ener
gy co
nsum
ptio
n (J
)
Figure 7 Energy consumption of the robot joints for differentcontrollers when the step length is 020m
50 100 150 2000Serial number of the samples
5
6
7
8
9
10
11
12
13
14
15
Join
t tor
que f
or 1
(Nm
)
NNSVMThe proposed NEO
Figure 8 Joint torque for 1205791 deduced by different control methods
reduced remarkably This contributes to the effectivenessof the proposed NEO strategy in terms of reducing theenergy consumption of biped robots At the same time theproposed NEO strategy minimizes the energy consumptionand guarantees three necessary constraints simultaneouslyTherefore the force-moment equilibrium equation of bipedrobots is guaranteed and the biped robot does not fall
On the other hand the SVM controller exhibits greaterenergy efficiency (realize the same motion with smaller driv-ing torques) compared with the NN controller The possiblecause is that the number of the learning samples for the NN
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
3
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 2
(Nm
)Figure 9 Joint torque for 1205792 deduced by different control methods
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 3
(Nm
)
Figure 10 Joint torque for 1205793 deduced by different control methods
controllers is not large enough in this work Conventionalmachine learning methods such as NN use empirical riskminimization (ERM) based on infinite samples which is dis-advantageous to the learning control based on small samplesizes for biped robots The SVM is direct implementationof the structural risk minimization (SRM) principle Thisdifference makes SVM more efficient in resolving the small-sample-sizes learning problems
7 Conclusions
To build a more practical objective function for the energyoptimization of biped robots three important constraints are
Mathematical Problems in Engineering 13
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus12
minus10
minus8
minus6
minus4
minus2
0
Join
t tor
que f
or 4
(Nm
)
Figure 11 Joint torque for 1205794 deduced by different control methods
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus10
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Join
t tor
que f
or 5
(Nm
)
Figure 12 Joint torque for 1205795 deduced by different control methods
incorporated into the optimal controller for biped robotsSimulation results demonstrate that the proposed NEO strat-egy effectively decreases the energy consumption of bipedwalking robot In addition the proposed strategy can guaran-tee the force-moment equilibrium equation and the physicallimits of the motors Coulomb friction is applied between theleg and the ground by setting a friction coefficient The bipedrobot can provide optimal joint torques without slippage ortipping over
It is worth noting that most of the existing algorithmsrealize the energy minimization via optimizing gait param-eters However gait parameters such as foot trajectoriesand the trajectories of the COG are not the only aspect
NNSVMThe proposed NEO
1
2
3
4
5
6
7
8
9
10
Join
t tor
que f
or 6
(Nm
)
50 100 150 2000Serial number of the samples
Figure 13 Joint torque for 1205796 deduced by different control methods
to be concerned Other factors such as the forces andmoments acting on the biped robot can also impose onenergy consumption of the biped robot to a large extent Forexample people walking in the mud or in a gale usually feelmore tiredTherefore when the foot trajectories and theCOGtrajectories are determined optimizing the torques of eachjoint is significant for the energy optimization of the wholebiped system This point is verified by simulations and theresults of this work are significant
In this work the proposed neurodynamics-basedmethodis an open-loop controller In the simulation experiments wedo not introduce any error accumulation during the bipedwalking So the simulated robot is able to follow the plannedtrajectories and does not fall However for a real robotsystem there must be error accumulation introduced by themechanical devices In this situation the biped robot tends todeviate from the reference trajectory if there is no feedbackand correction for error compensating Consequently futureworks will include the design of closed-loop controllerswhich are more suitable for real robot systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (Projects 61403264 and 61305098) andby the Natural Science Foundation of Guangdong Province(Project 2016A030310018) Grateful thanks go to Dr Ye Xian-Ming who gives considerable help by means of environmentsupport
14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
where 119875Ω(sdot) is a piecewise linear projection operator with the119894th projection element of 119875Ω(119910) = [119875Ω(1199101) 119875Ω(1199102119899+119897+119898)]119879being defined as
119875Ω (119910119894) = 119910minus119894 if 119910119894 lt 119910minus119894119910119894 if 119910minus119894 le 119910119894 le 119910+119894 119910+119894 if 119910119894 gt 119910+119894 forall119894 isin 1 2119899 + 119897 + 119898
(44)
To solve linear projection equation (43) the dual dynamicalsystem design approach presented in [20] is adopted tobuild a dynamical system Considering the asymmetric 119872a primal-dual neural network is developed as follows to solve(43) 119910 = 120574 (119868 +119872119879) 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (45)
where 120574 gt 0 is a design parameter used to scale theconvergence rate of the system The convergence rate isimproved when the value of 120574 is increased Furthermore byreplacing 120574(119868+119872119879)with 120572 the dynamical system (45) can berewritten as follows119910 = 120572 119875Ω (119910 minus (119872119910 + 119901)) minus 119910 (46)
where 120572 is a positive design parameter for the convergencerate of the PDNN (see (46)) About the convergence analysisof the above-mentioned primal-dual dynamical solver thereis a theorem presented as follows
Theorem 6 (see [22]) Starting from any initial state thestate vector 119910(119905) of primal-dual dynamical system (45) isconvergent to an equilibrium point 119910lowast of which the first 2119899elements constitute the optimal solution 120591lowast to the quadraticprogramming problem in (19)ndash(22) Moreover the exponentialconvergence can be achieved if there exists a constant 120588 gt 0such that 1003817100381710038171003817119910 minus 119875Ω (119910 minus (119872119910 + 119901))100381710038171003817100381722 ge 120588 1003817100381710038171003817119910 minus 119910lowast100381710038171003817100381722 (47)
Remark 7 As a primal-dual dynamical solver primal-dualneural networks can efficiently generate exact optimal solu-tions [21] Furthermore compared to dual neural networksthe LVI- (linear variational inequality-) based primal-dualneural networks do not entail any matrix inversion onlineso that they can reduce the computational time greatly [20]Therefore a LVI-based primal-dual neural network is appliedto perform theminimization of the energy consumptionwithequality and inequality constraints for biped robots in thiswork
5 Neurodynamics-Based EnergyOptimization Control
Over the past two decades much progress has been madein the control of robot systems based on various controltechniques In [30] two novel robust adaptive PID control
schemes are proposed to solve the strong nonlinearity andcoupling problems in robot manipulator control In [31] asupport vector regression-based control system is proposedto learn the external disturbances and increase the zero-moment-point stability margin of humanoid robots In [32]a kinematics open-loop control system of hexapod robot withan embedded digital signal controller is proposed In [33] anopen-loop controller is implemented on field programmablegate array (FPGA) of the robot Experimental results revealthe viability of the proposed controller
On the other hand many mature techniques have beenused to track the planned trajectories with a certain controlstrategy In [34] a trajectory generator and a joint trajectorytracking controller are designed The proposed combinationis successfully implemented and the robot is able to walkat 011ms Literature [35] considers the problem of jointtrajectory control with oscillations cancelling for planarmultilink flexible manipulators A feed-forward torque isdesigned to preset the elastic coordinates of the system sothat the controller is able to drive the arm along the desiredtrajectory In [36] in order to reduce gait planning andto get a good tracking performance master-slaver dual-legcoordination control was proposed for the biped robot withheterogeneous legs In [37] an open-closed-loop iterativelearning control algorithm with angle correction term isproposed which uses the error signal and the deviation oftwo adjacent error signals to adjust itself
In this work the proposed neurodynamics-basedmethodis an open-loop controller As shown in Figure 1 controlmethod based on energy-efficiency optimization is proposedto obtain the trade-off between the force-moment equilib-rium and energy efficiency for biped walking by minimizingthe energy-related cost function while guaranteeing physicalconstraints There are two parts in the control system QPproblem for energy optimization and a LVI-based primal-dual neural network for solving the QP problemThe controlobject of the proposedmethod is to follow the planned trajec-tories for the biped joints using optimal joint torques deducedby the proposed controller The inputs of the controllerinclude the planned trajectories for the biped joints theforce-moment equilibrium equation of biped robot frictioncoefficient between the ground and the robot and physicalparameters of the motors equipped on the robotThe outputsof the controller are the optimal joint torques for the bipedjoints which are deduced using a LVI-based primal-dualneural network
Firstly the strategy for optimizing the energy efficiencyis formulated as a constrained QP problem Three importantphysical constraints for the biped system are formulated inthis QP problem for energy optimization of biped walkingrobots
Secondly a neurodynamics-based solver is presented tosolve the proposed constrained optimization problem
Thirdly joint trajectories are planned for the biped robotThe planned trajectories provide parameters for the force-moment equilibrium equation of biped robot which is oneof the constraints of the energy optimization QP problem Sothe biped robot is able to make the step and does not fall
8 Mathematical Problems in Engineering
QP problem for energy optimization of biped robots
(see equations (19)ndash(22))
LVI-based primal-dual neural network (PDNN) (see equation (46))
Biped robot
Q
c
p
y
+
+
M
Bipedwalking
Gaitplanning
plusmn
plusmn
PΩ(middot)
I minus M
y
lowast
int
minus le le +
AOK le BuK
st A = W
GCH (12)TQ + GR(cT 0)
minus
minus
[c minusW BOK]T
sum
sum
[[[[[
Q minusAT ATOK
A 0 0
minusAOK 0 0
]]]]]
Figure 1 Neurodynamics-based energy optimization strategy for biped robots
B y
x
z
1
2
3
4
5
6
LNB
LH
LMB
Figure 2 Simplified model of the biped robot
Table 1 Main parameters of the biped robot
Link Length (m) Mass (kg) Inertia moment (kgsdotm2)Torso 0175 1060 001623Thigh 0130 0075 (times2) 000037 (times2)Shank 0130 0075 (times2) 000037 (times2)Foot 0020 0060 (times2) 000004 (times2)6 Simulation Research
To verify the effectiveness of the proposed energy-efficiencycontrol method some simulations are implemented in thissection Matlab is used to model the biped robot and thecontroller
61 Structure and Parameters of the Biped Robot Considera planar biped robot with 6 degrees of freedom shown inFigure 2 The robot consists of one torso and two legs Themain parameters of the biped robot can be found in Table 1
Typical gait is planned for this simulated biped robot towalk on the horizontal ground In this work it is assumed thatthe torso of the biped robotmoves at a constant velocitywith aconstant heightTheCOGof the simplifiedmodel is located atthe geometric center of the torsoThe basic coordinate frame
with its origin at the COG is defined as a body-fixed frameThe whole walking period of the biped robot is considered tobe composed of a single-support phase and an instantaneousdouble-support phase The supporting foot is assumed toremain in full contact with the ground during the single-support phase The trajectories of the ankles and the hips aregiven as follows119910119886 (119896) = 119886120587 2120587119873 + 1119896 minus sin( 2120587119873 + 1119896)
119911119886 (119896) = 119889120587 1 minus cos( 2120587119873 + 1119896)119910ℎ (119896) = 12119910119886 (119896) + 1198862119911ℎ (119896) = 12119911119886 (119896) + 119871 th + 119871 sh minus 1198892 (48)
where 119910ℎ(119896) and 119911ℎ(119896) denote the position of the hip and119910119886(119896) and 119911119886(119896) denote the position of the swinging anklejoint at the 119896th sample 119886 is the walking step length and 119889is the height of swinging ankle 119873 + 1 is the total samplingnumber in a walking cycle 119879 119871 th and 119871 sh are the lengths oflower limbs Here 119889 = 002m and 119879 = 1 s62 Parameters for the QP Problem and the Neurodynamics-Based Solver For the parameters of the constrained QPproblem in (19)ndash(22) the parameters of the motors aredetermined by the motors that are equipped in the robotHere we take a set of typicalmotor parameters as an exampleThe electric resistance of the motor 119877 = 917 (Ω) torqueconstant 119896119872 = 168 times 10minus3 (NmA) gear reduction rate119873 = 200 and the joint gearrsquos mechanical efficiency 120578 = 07Submitting all the above-mentioned parameters to (9) wehave 119876 = 3321198686times6 and 119888 = 143[ 12057911 12057912 12057913 12057921 12057922 12057923]119879where 120579119894 = [ 1205791198941 1205791198942 1205791198943]119879 is the joint velocity vector of the119894th leg Here the joint velocity can be calculated using thegait planned in Section 61 Consider the 119894th leg of a bipedrobot 120579119894(119896 + 1) = [120579119894(119896 + 1) minus 120579119894(119896)]Δ119905 119894 = 1 2 where120579119894(119896 + 1) denotes the joint velocity at the (119896 + 1)th sampleand Δ119905 is the sampling interval The smaller the value of Δ119905is the more accurate but the more computationally intensivethe joint velocity is [38]
Mathematical Problems in Engineering 9
Input layer Hidden layer Output layer
u8 = 1
u1 = 1
u7 = 7
uM = 7
11
12
ML
11
12
LJ
S( Msumm=1
m1um)
S( Msumm=1
m2um)
S( Msumm=1
mLum)
J =Lsuml=1
lJ middot1
(1 + eminussum=1 u)
1 =Lsuml=1
l1 middot1
(1 + eminussum=1 u)
Figure 3 Structure of the three-layered NN
For the constraint condition of force-moment equilib-rium equation the Coulomb friction coefficient depends onthe ground environmentHerewe take120583 = 06 as an exampleThe inertia matrix of the leg 119863119894 the centrifugal and Coriolisterms ℎ119894 and the gravity terms 119892119894 in the dynamic equationcan be calculated using the method shown in [39]
Considering the physical limits of the motors we have120585+ = minus120585minus = [12 12]119879For the neurodynamics-based solver the positive design
parameter for the convergence rate of the PDNN is 120572 = 01which is determined using the trial-and-error method
63 Biped Walking via Different Controllers The proposedcontrol method is tested on the control of the biped robotmentioned above by simulation experiments The perfor-mances of the proposed NEO are compared with those of theSVM control methods [40 41] and NN control methods
For the SVM controller the parameters include a penaltycoefficient 119862 = 1000 degree of the polynomial kernels 119902 = 2width of the RBF kernels 120590 = 015 and mixed coefficientof the mixed kernels 119886 = 095 When training the bipeddynamic we sample the joint variables in the period of 119879 =1 s and let the sampling interval be Δ119905 = 0005 s That isto say there are 200 sampling points in a single walkingperiod the desired sample set satisfying the ZMP criterionis (Θ1 1205911) (Θ200 120591200)
On the other side for comparison with the proposedNEO a three-layered backpropagation (BP) NN is built tocontrol the biped robot Details of the NN are introduced asfollows
Layer 1 (Input Layer) In this layer the input signal is directlytransferred to the next layer that is
119874(1)119898 = 119906119898 (49)
where 119906119898 = Θ = [1205791 1205792 1205796 1205791 1205792 1205796]119879 and 119898 =1 119872 (119872 = 12) is the input variable 119874(1)119898 is the outputof the input layer
Layer 2 (Hidden Layer) Each node in the hidden layerperforms a transfer operation using a Sigmoid function thatis
119874(2)119897 = 119878( 119872sum119898=1
120575119898119897119906119898) = 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (50)
where 119874(2)119897 is the output of the hidden layer 119878(sdot) is a Sigmoidfunction 119897 = 1 119871 is the index of the hidden unitsThe number of the hidden units is designed as 119871 = 20here using the trial-and-error method 120575119898119897 is the connectionweight between the input layer and the hidden layer Theinitial values of the connection weights can be selectedrandomly and different initial values could lead to differentperformance of the NN
Layer 3 (Output Layer) This layer performs the calculationfor the output of the whole network
120591119895 = 119871sum119897=1
120573119895119897 sdot 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (51)
where 120591119895 is the control torque for the 119895th biped joint 119895 =1 119869 (119869 = 6) 120573119895119897 is the connection weight between thehidden layer and the output layerThe initial values of 120573119895119897 canbe selected randomly
By using BP algorithm the NN is trained offline with the200 desired samples for 100 times The structure of the NN isshown in Figure 3
The proposed control method and the above-mentionedtwo intelligent methods are adopted to control the simulatedbiped robot respectively As we can see from Figures 4-5all the three methods can realize the planned biped walking
10 Mathematical Problems in Engineering
minus005
0
005
01
015
02
025
03
035
04
045z
(m)
015 02 025 03 035 04 045 0501x (m)
(a)
015 02 025 03 035 04 045 0501x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 0501x (m)
(c)
Figure 4 Biped walking using different controllers when the step length is 018m (a) SVM (b) NN and (c) the proposed NEO
Energy consumption trajectories are shown in Figures 6-7As shown in the figures the proposed NEO needs less energythan the other methods due to the proposed energy-basedoptimal control For example when the energy consumptionof all the joints is 15979 J for the proposed NEO the energyconsumption is 40910 J for the NN and 31168 J for the SVM(see Table 2) Furthermore the proposed NEO always needsless energy than the other two methods when different bipedmotions are considered (Motion 1 the step length is 018mMotion 2 the step length is 020m) At the same time theSVM controller exhibits greater energy efficiency comparedwith the NN controller The possible cause is that the SVM ismore efficient in learning the energy-efficient controller usinglimited samples
Remark 8 In the simulation section the robotrsquos joint trajec-tories are predefinedThis paper makes contribution by opti-mizing the joint torques to decrease the energy consumptionwithout changing the biped gaits
Table 2 Energy consumption comparisons with other methods
Method Step length (m) E (J)NN
01840910
SVM 31168The proposed NEO 15979NN
02083164
SVM 57229The proposed NEO 31400
Joint torques for different controllers when the step lengthis 020m are shown in Figures 8ndash13 As shown in thefigures the proposed NEO strategy exhibits smaller drivingtorques compared with the NN method and SVM methodIt is because we deduce the optimal joint torque for thebiped robot according to the proposed energy optimizationproblem As a result torque costs of the biped joints are
Mathematical Problems in Engineering 11
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(a)
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 05 055 0601x (m)
(c)
Figure 5 Biped walking using different controllers when the step length is 020m (a) SVM (b) NN and (c) the proposed NEO
NNSVMThe proposed NEO
0
100
200
300
400
500
600
700
800
900
Ener
gy co
nsum
ptio
n (J
)
02 04 06 08 10Time (s)
Figure 6 Energy consumption of the robot joints for different controllers when the step length is 018m
12 Mathematical Problems in Engineering
NNSVMThe proposed NEO
02 04 06 08 10Time (s)
0
200
400
600
800
1000
1200
1400
1600
1800
Ener
gy co
nsum
ptio
n (J
)
Figure 7 Energy consumption of the robot joints for differentcontrollers when the step length is 020m
50 100 150 2000Serial number of the samples
5
6
7
8
9
10
11
12
13
14
15
Join
t tor
que f
or 1
(Nm
)
NNSVMThe proposed NEO
Figure 8 Joint torque for 1205791 deduced by different control methods
reduced remarkably This contributes to the effectivenessof the proposed NEO strategy in terms of reducing theenergy consumption of biped robots At the same time theproposed NEO strategy minimizes the energy consumptionand guarantees three necessary constraints simultaneouslyTherefore the force-moment equilibrium equation of bipedrobots is guaranteed and the biped robot does not fall
On the other hand the SVM controller exhibits greaterenergy efficiency (realize the same motion with smaller driv-ing torques) compared with the NN controller The possiblecause is that the number of the learning samples for the NN
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
3
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 2
(Nm
)Figure 9 Joint torque for 1205792 deduced by different control methods
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 3
(Nm
)
Figure 10 Joint torque for 1205793 deduced by different control methods
controllers is not large enough in this work Conventionalmachine learning methods such as NN use empirical riskminimization (ERM) based on infinite samples which is dis-advantageous to the learning control based on small samplesizes for biped robots The SVM is direct implementationof the structural risk minimization (SRM) principle Thisdifference makes SVM more efficient in resolving the small-sample-sizes learning problems
7 Conclusions
To build a more practical objective function for the energyoptimization of biped robots three important constraints are
Mathematical Problems in Engineering 13
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus12
minus10
minus8
minus6
minus4
minus2
0
Join
t tor
que f
or 4
(Nm
)
Figure 11 Joint torque for 1205794 deduced by different control methods
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus10
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Join
t tor
que f
or 5
(Nm
)
Figure 12 Joint torque for 1205795 deduced by different control methods
incorporated into the optimal controller for biped robotsSimulation results demonstrate that the proposed NEO strat-egy effectively decreases the energy consumption of bipedwalking robot In addition the proposed strategy can guaran-tee the force-moment equilibrium equation and the physicallimits of the motors Coulomb friction is applied between theleg and the ground by setting a friction coefficient The bipedrobot can provide optimal joint torques without slippage ortipping over
It is worth noting that most of the existing algorithmsrealize the energy minimization via optimizing gait param-eters However gait parameters such as foot trajectoriesand the trajectories of the COG are not the only aspect
NNSVMThe proposed NEO
1
2
3
4
5
6
7
8
9
10
Join
t tor
que f
or 6
(Nm
)
50 100 150 2000Serial number of the samples
Figure 13 Joint torque for 1205796 deduced by different control methods
to be concerned Other factors such as the forces andmoments acting on the biped robot can also impose onenergy consumption of the biped robot to a large extent Forexample people walking in the mud or in a gale usually feelmore tiredTherefore when the foot trajectories and theCOGtrajectories are determined optimizing the torques of eachjoint is significant for the energy optimization of the wholebiped system This point is verified by simulations and theresults of this work are significant
In this work the proposed neurodynamics-basedmethodis an open-loop controller In the simulation experiments wedo not introduce any error accumulation during the bipedwalking So the simulated robot is able to follow the plannedtrajectories and does not fall However for a real robotsystem there must be error accumulation introduced by themechanical devices In this situation the biped robot tends todeviate from the reference trajectory if there is no feedbackand correction for error compensating Consequently futureworks will include the design of closed-loop controllerswhich are more suitable for real robot systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (Projects 61403264 and 61305098) andby the Natural Science Foundation of Guangdong Province(Project 2016A030310018) Grateful thanks go to Dr Ye Xian-Ming who gives considerable help by means of environmentsupport
14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
QP problem for energy optimization of biped robots
(see equations (19)ndash(22))
LVI-based primal-dual neural network (PDNN) (see equation (46))
Biped robot
Q
c
p
y
+
+
M
Bipedwalking
Gaitplanning
plusmn
plusmn
PΩ(middot)
I minus M
y
lowast
int
minus le le +
AOK le BuK
st A = W
GCH (12)TQ + GR(cT 0)
minus
minus
[c minusW BOK]T
sum
sum
[[[[[
Q minusAT ATOK
A 0 0
minusAOK 0 0
]]]]]
Figure 1 Neurodynamics-based energy optimization strategy for biped robots
B y
x
z
1
2
3
4
5
6
LNB
LH
LMB
Figure 2 Simplified model of the biped robot
Table 1 Main parameters of the biped robot
Link Length (m) Mass (kg) Inertia moment (kgsdotm2)Torso 0175 1060 001623Thigh 0130 0075 (times2) 000037 (times2)Shank 0130 0075 (times2) 000037 (times2)Foot 0020 0060 (times2) 000004 (times2)6 Simulation Research
To verify the effectiveness of the proposed energy-efficiencycontrol method some simulations are implemented in thissection Matlab is used to model the biped robot and thecontroller
61 Structure and Parameters of the Biped Robot Considera planar biped robot with 6 degrees of freedom shown inFigure 2 The robot consists of one torso and two legs Themain parameters of the biped robot can be found in Table 1
Typical gait is planned for this simulated biped robot towalk on the horizontal ground In this work it is assumed thatthe torso of the biped robotmoves at a constant velocitywith aconstant heightTheCOGof the simplifiedmodel is located atthe geometric center of the torsoThe basic coordinate frame
with its origin at the COG is defined as a body-fixed frameThe whole walking period of the biped robot is considered tobe composed of a single-support phase and an instantaneousdouble-support phase The supporting foot is assumed toremain in full contact with the ground during the single-support phase The trajectories of the ankles and the hips aregiven as follows119910119886 (119896) = 119886120587 2120587119873 + 1119896 minus sin( 2120587119873 + 1119896)
119911119886 (119896) = 119889120587 1 minus cos( 2120587119873 + 1119896)119910ℎ (119896) = 12119910119886 (119896) + 1198862119911ℎ (119896) = 12119911119886 (119896) + 119871 th + 119871 sh minus 1198892 (48)
where 119910ℎ(119896) and 119911ℎ(119896) denote the position of the hip and119910119886(119896) and 119911119886(119896) denote the position of the swinging anklejoint at the 119896th sample 119886 is the walking step length and 119889is the height of swinging ankle 119873 + 1 is the total samplingnumber in a walking cycle 119879 119871 th and 119871 sh are the lengths oflower limbs Here 119889 = 002m and 119879 = 1 s62 Parameters for the QP Problem and the Neurodynamics-Based Solver For the parameters of the constrained QPproblem in (19)ndash(22) the parameters of the motors aredetermined by the motors that are equipped in the robotHere we take a set of typicalmotor parameters as an exampleThe electric resistance of the motor 119877 = 917 (Ω) torqueconstant 119896119872 = 168 times 10minus3 (NmA) gear reduction rate119873 = 200 and the joint gearrsquos mechanical efficiency 120578 = 07Submitting all the above-mentioned parameters to (9) wehave 119876 = 3321198686times6 and 119888 = 143[ 12057911 12057912 12057913 12057921 12057922 12057923]119879where 120579119894 = [ 1205791198941 1205791198942 1205791198943]119879 is the joint velocity vector of the119894th leg Here the joint velocity can be calculated using thegait planned in Section 61 Consider the 119894th leg of a bipedrobot 120579119894(119896 + 1) = [120579119894(119896 + 1) minus 120579119894(119896)]Δ119905 119894 = 1 2 where120579119894(119896 + 1) denotes the joint velocity at the (119896 + 1)th sampleand Δ119905 is the sampling interval The smaller the value of Δ119905is the more accurate but the more computationally intensivethe joint velocity is [38]
Mathematical Problems in Engineering 9
Input layer Hidden layer Output layer
u8 = 1
u1 = 1
u7 = 7
uM = 7
11
12
ML
11
12
LJ
S( Msumm=1
m1um)
S( Msumm=1
m2um)
S( Msumm=1
mLum)
J =Lsuml=1
lJ middot1
(1 + eminussum=1 u)
1 =Lsuml=1
l1 middot1
(1 + eminussum=1 u)
Figure 3 Structure of the three-layered NN
For the constraint condition of force-moment equilib-rium equation the Coulomb friction coefficient depends onthe ground environmentHerewe take120583 = 06 as an exampleThe inertia matrix of the leg 119863119894 the centrifugal and Coriolisterms ℎ119894 and the gravity terms 119892119894 in the dynamic equationcan be calculated using the method shown in [39]
Considering the physical limits of the motors we have120585+ = minus120585minus = [12 12]119879For the neurodynamics-based solver the positive design
parameter for the convergence rate of the PDNN is 120572 = 01which is determined using the trial-and-error method
63 Biped Walking via Different Controllers The proposedcontrol method is tested on the control of the biped robotmentioned above by simulation experiments The perfor-mances of the proposed NEO are compared with those of theSVM control methods [40 41] and NN control methods
For the SVM controller the parameters include a penaltycoefficient 119862 = 1000 degree of the polynomial kernels 119902 = 2width of the RBF kernels 120590 = 015 and mixed coefficientof the mixed kernels 119886 = 095 When training the bipeddynamic we sample the joint variables in the period of 119879 =1 s and let the sampling interval be Δ119905 = 0005 s That isto say there are 200 sampling points in a single walkingperiod the desired sample set satisfying the ZMP criterionis (Θ1 1205911) (Θ200 120591200)
On the other side for comparison with the proposedNEO a three-layered backpropagation (BP) NN is built tocontrol the biped robot Details of the NN are introduced asfollows
Layer 1 (Input Layer) In this layer the input signal is directlytransferred to the next layer that is
119874(1)119898 = 119906119898 (49)
where 119906119898 = Θ = [1205791 1205792 1205796 1205791 1205792 1205796]119879 and 119898 =1 119872 (119872 = 12) is the input variable 119874(1)119898 is the outputof the input layer
Layer 2 (Hidden Layer) Each node in the hidden layerperforms a transfer operation using a Sigmoid function thatis
119874(2)119897 = 119878( 119872sum119898=1
120575119898119897119906119898) = 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (50)
where 119874(2)119897 is the output of the hidden layer 119878(sdot) is a Sigmoidfunction 119897 = 1 119871 is the index of the hidden unitsThe number of the hidden units is designed as 119871 = 20here using the trial-and-error method 120575119898119897 is the connectionweight between the input layer and the hidden layer Theinitial values of the connection weights can be selectedrandomly and different initial values could lead to differentperformance of the NN
Layer 3 (Output Layer) This layer performs the calculationfor the output of the whole network
120591119895 = 119871sum119897=1
120573119895119897 sdot 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (51)
where 120591119895 is the control torque for the 119895th biped joint 119895 =1 119869 (119869 = 6) 120573119895119897 is the connection weight between thehidden layer and the output layerThe initial values of 120573119895119897 canbe selected randomly
By using BP algorithm the NN is trained offline with the200 desired samples for 100 times The structure of the NN isshown in Figure 3
The proposed control method and the above-mentionedtwo intelligent methods are adopted to control the simulatedbiped robot respectively As we can see from Figures 4-5all the three methods can realize the planned biped walking
10 Mathematical Problems in Engineering
minus005
0
005
01
015
02
025
03
035
04
045z
(m)
015 02 025 03 035 04 045 0501x (m)
(a)
015 02 025 03 035 04 045 0501x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 0501x (m)
(c)
Figure 4 Biped walking using different controllers when the step length is 018m (a) SVM (b) NN and (c) the proposed NEO
Energy consumption trajectories are shown in Figures 6-7As shown in the figures the proposed NEO needs less energythan the other methods due to the proposed energy-basedoptimal control For example when the energy consumptionof all the joints is 15979 J for the proposed NEO the energyconsumption is 40910 J for the NN and 31168 J for the SVM(see Table 2) Furthermore the proposed NEO always needsless energy than the other two methods when different bipedmotions are considered (Motion 1 the step length is 018mMotion 2 the step length is 020m) At the same time theSVM controller exhibits greater energy efficiency comparedwith the NN controller The possible cause is that the SVM ismore efficient in learning the energy-efficient controller usinglimited samples
Remark 8 In the simulation section the robotrsquos joint trajec-tories are predefinedThis paper makes contribution by opti-mizing the joint torques to decrease the energy consumptionwithout changing the biped gaits
Table 2 Energy consumption comparisons with other methods
Method Step length (m) E (J)NN
01840910
SVM 31168The proposed NEO 15979NN
02083164
SVM 57229The proposed NEO 31400
Joint torques for different controllers when the step lengthis 020m are shown in Figures 8ndash13 As shown in thefigures the proposed NEO strategy exhibits smaller drivingtorques compared with the NN method and SVM methodIt is because we deduce the optimal joint torque for thebiped robot according to the proposed energy optimizationproblem As a result torque costs of the biped joints are
Mathematical Problems in Engineering 11
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(a)
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 05 055 0601x (m)
(c)
Figure 5 Biped walking using different controllers when the step length is 020m (a) SVM (b) NN and (c) the proposed NEO
NNSVMThe proposed NEO
0
100
200
300
400
500
600
700
800
900
Ener
gy co
nsum
ptio
n (J
)
02 04 06 08 10Time (s)
Figure 6 Energy consumption of the robot joints for different controllers when the step length is 018m
12 Mathematical Problems in Engineering
NNSVMThe proposed NEO
02 04 06 08 10Time (s)
0
200
400
600
800
1000
1200
1400
1600
1800
Ener
gy co
nsum
ptio
n (J
)
Figure 7 Energy consumption of the robot joints for differentcontrollers when the step length is 020m
50 100 150 2000Serial number of the samples
5
6
7
8
9
10
11
12
13
14
15
Join
t tor
que f
or 1
(Nm
)
NNSVMThe proposed NEO
Figure 8 Joint torque for 1205791 deduced by different control methods
reduced remarkably This contributes to the effectivenessof the proposed NEO strategy in terms of reducing theenergy consumption of biped robots At the same time theproposed NEO strategy minimizes the energy consumptionand guarantees three necessary constraints simultaneouslyTherefore the force-moment equilibrium equation of bipedrobots is guaranteed and the biped robot does not fall
On the other hand the SVM controller exhibits greaterenergy efficiency (realize the same motion with smaller driv-ing torques) compared with the NN controller The possiblecause is that the number of the learning samples for the NN
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
3
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 2
(Nm
)Figure 9 Joint torque for 1205792 deduced by different control methods
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 3
(Nm
)
Figure 10 Joint torque for 1205793 deduced by different control methods
controllers is not large enough in this work Conventionalmachine learning methods such as NN use empirical riskminimization (ERM) based on infinite samples which is dis-advantageous to the learning control based on small samplesizes for biped robots The SVM is direct implementationof the structural risk minimization (SRM) principle Thisdifference makes SVM more efficient in resolving the small-sample-sizes learning problems
7 Conclusions
To build a more practical objective function for the energyoptimization of biped robots three important constraints are
Mathematical Problems in Engineering 13
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus12
minus10
minus8
minus6
minus4
minus2
0
Join
t tor
que f
or 4
(Nm
)
Figure 11 Joint torque for 1205794 deduced by different control methods
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus10
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Join
t tor
que f
or 5
(Nm
)
Figure 12 Joint torque for 1205795 deduced by different control methods
incorporated into the optimal controller for biped robotsSimulation results demonstrate that the proposed NEO strat-egy effectively decreases the energy consumption of bipedwalking robot In addition the proposed strategy can guaran-tee the force-moment equilibrium equation and the physicallimits of the motors Coulomb friction is applied between theleg and the ground by setting a friction coefficient The bipedrobot can provide optimal joint torques without slippage ortipping over
It is worth noting that most of the existing algorithmsrealize the energy minimization via optimizing gait param-eters However gait parameters such as foot trajectoriesand the trajectories of the COG are not the only aspect
NNSVMThe proposed NEO
1
2
3
4
5
6
7
8
9
10
Join
t tor
que f
or 6
(Nm
)
50 100 150 2000Serial number of the samples
Figure 13 Joint torque for 1205796 deduced by different control methods
to be concerned Other factors such as the forces andmoments acting on the biped robot can also impose onenergy consumption of the biped robot to a large extent Forexample people walking in the mud or in a gale usually feelmore tiredTherefore when the foot trajectories and theCOGtrajectories are determined optimizing the torques of eachjoint is significant for the energy optimization of the wholebiped system This point is verified by simulations and theresults of this work are significant
In this work the proposed neurodynamics-basedmethodis an open-loop controller In the simulation experiments wedo not introduce any error accumulation during the bipedwalking So the simulated robot is able to follow the plannedtrajectories and does not fall However for a real robotsystem there must be error accumulation introduced by themechanical devices In this situation the biped robot tends todeviate from the reference trajectory if there is no feedbackand correction for error compensating Consequently futureworks will include the design of closed-loop controllerswhich are more suitable for real robot systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (Projects 61403264 and 61305098) andby the Natural Science Foundation of Guangdong Province(Project 2016A030310018) Grateful thanks go to Dr Ye Xian-Ming who gives considerable help by means of environmentsupport
14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
Input layer Hidden layer Output layer
u8 = 1
u1 = 1
u7 = 7
uM = 7
11
12
ML
11
12
LJ
S( Msumm=1
m1um)
S( Msumm=1
m2um)
S( Msumm=1
mLum)
J =Lsuml=1
lJ middot1
(1 + eminussum=1 u)
1 =Lsuml=1
l1 middot1
(1 + eminussum=1 u)
Figure 3 Structure of the three-layered NN
For the constraint condition of force-moment equilib-rium equation the Coulomb friction coefficient depends onthe ground environmentHerewe take120583 = 06 as an exampleThe inertia matrix of the leg 119863119894 the centrifugal and Coriolisterms ℎ119894 and the gravity terms 119892119894 in the dynamic equationcan be calculated using the method shown in [39]
Considering the physical limits of the motors we have120585+ = minus120585minus = [12 12]119879For the neurodynamics-based solver the positive design
parameter for the convergence rate of the PDNN is 120572 = 01which is determined using the trial-and-error method
63 Biped Walking via Different Controllers The proposedcontrol method is tested on the control of the biped robotmentioned above by simulation experiments The perfor-mances of the proposed NEO are compared with those of theSVM control methods [40 41] and NN control methods
For the SVM controller the parameters include a penaltycoefficient 119862 = 1000 degree of the polynomial kernels 119902 = 2width of the RBF kernels 120590 = 015 and mixed coefficientof the mixed kernels 119886 = 095 When training the bipeddynamic we sample the joint variables in the period of 119879 =1 s and let the sampling interval be Δ119905 = 0005 s That isto say there are 200 sampling points in a single walkingperiod the desired sample set satisfying the ZMP criterionis (Θ1 1205911) (Θ200 120591200)
On the other side for comparison with the proposedNEO a three-layered backpropagation (BP) NN is built tocontrol the biped robot Details of the NN are introduced asfollows
Layer 1 (Input Layer) In this layer the input signal is directlytransferred to the next layer that is
119874(1)119898 = 119906119898 (49)
where 119906119898 = Θ = [1205791 1205792 1205796 1205791 1205792 1205796]119879 and 119898 =1 119872 (119872 = 12) is the input variable 119874(1)119898 is the outputof the input layer
Layer 2 (Hidden Layer) Each node in the hidden layerperforms a transfer operation using a Sigmoid function thatis
119874(2)119897 = 119878( 119872sum119898=1
120575119898119897119906119898) = 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (50)
where 119874(2)119897 is the output of the hidden layer 119878(sdot) is a Sigmoidfunction 119897 = 1 119871 is the index of the hidden unitsThe number of the hidden units is designed as 119871 = 20here using the trial-and-error method 120575119898119897 is the connectionweight between the input layer and the hidden layer Theinitial values of the connection weights can be selectedrandomly and different initial values could lead to differentperformance of the NN
Layer 3 (Output Layer) This layer performs the calculationfor the output of the whole network
120591119895 = 119871sum119897=1
120573119895119897 sdot 1(1 + 119890minussum119872119898=1 120575119898119897119906119898) (51)
where 120591119895 is the control torque for the 119895th biped joint 119895 =1 119869 (119869 = 6) 120573119895119897 is the connection weight between thehidden layer and the output layerThe initial values of 120573119895119897 canbe selected randomly
By using BP algorithm the NN is trained offline with the200 desired samples for 100 times The structure of the NN isshown in Figure 3
The proposed control method and the above-mentionedtwo intelligent methods are adopted to control the simulatedbiped robot respectively As we can see from Figures 4-5all the three methods can realize the planned biped walking
10 Mathematical Problems in Engineering
minus005
0
005
01
015
02
025
03
035
04
045z
(m)
015 02 025 03 035 04 045 0501x (m)
(a)
015 02 025 03 035 04 045 0501x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 0501x (m)
(c)
Figure 4 Biped walking using different controllers when the step length is 018m (a) SVM (b) NN and (c) the proposed NEO
Energy consumption trajectories are shown in Figures 6-7As shown in the figures the proposed NEO needs less energythan the other methods due to the proposed energy-basedoptimal control For example when the energy consumptionof all the joints is 15979 J for the proposed NEO the energyconsumption is 40910 J for the NN and 31168 J for the SVM(see Table 2) Furthermore the proposed NEO always needsless energy than the other two methods when different bipedmotions are considered (Motion 1 the step length is 018mMotion 2 the step length is 020m) At the same time theSVM controller exhibits greater energy efficiency comparedwith the NN controller The possible cause is that the SVM ismore efficient in learning the energy-efficient controller usinglimited samples
Remark 8 In the simulation section the robotrsquos joint trajec-tories are predefinedThis paper makes contribution by opti-mizing the joint torques to decrease the energy consumptionwithout changing the biped gaits
Table 2 Energy consumption comparisons with other methods
Method Step length (m) E (J)NN
01840910
SVM 31168The proposed NEO 15979NN
02083164
SVM 57229The proposed NEO 31400
Joint torques for different controllers when the step lengthis 020m are shown in Figures 8ndash13 As shown in thefigures the proposed NEO strategy exhibits smaller drivingtorques compared with the NN method and SVM methodIt is because we deduce the optimal joint torque for thebiped robot according to the proposed energy optimizationproblem As a result torque costs of the biped joints are
Mathematical Problems in Engineering 11
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(a)
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 05 055 0601x (m)
(c)
Figure 5 Biped walking using different controllers when the step length is 020m (a) SVM (b) NN and (c) the proposed NEO
NNSVMThe proposed NEO
0
100
200
300
400
500
600
700
800
900
Ener
gy co
nsum
ptio
n (J
)
02 04 06 08 10Time (s)
Figure 6 Energy consumption of the robot joints for different controllers when the step length is 018m
12 Mathematical Problems in Engineering
NNSVMThe proposed NEO
02 04 06 08 10Time (s)
0
200
400
600
800
1000
1200
1400
1600
1800
Ener
gy co
nsum
ptio
n (J
)
Figure 7 Energy consumption of the robot joints for differentcontrollers when the step length is 020m
50 100 150 2000Serial number of the samples
5
6
7
8
9
10
11
12
13
14
15
Join
t tor
que f
or 1
(Nm
)
NNSVMThe proposed NEO
Figure 8 Joint torque for 1205791 deduced by different control methods
reduced remarkably This contributes to the effectivenessof the proposed NEO strategy in terms of reducing theenergy consumption of biped robots At the same time theproposed NEO strategy minimizes the energy consumptionand guarantees three necessary constraints simultaneouslyTherefore the force-moment equilibrium equation of bipedrobots is guaranteed and the biped robot does not fall
On the other hand the SVM controller exhibits greaterenergy efficiency (realize the same motion with smaller driv-ing torques) compared with the NN controller The possiblecause is that the number of the learning samples for the NN
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
3
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 2
(Nm
)Figure 9 Joint torque for 1205792 deduced by different control methods
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 3
(Nm
)
Figure 10 Joint torque for 1205793 deduced by different control methods
controllers is not large enough in this work Conventionalmachine learning methods such as NN use empirical riskminimization (ERM) based on infinite samples which is dis-advantageous to the learning control based on small samplesizes for biped robots The SVM is direct implementationof the structural risk minimization (SRM) principle Thisdifference makes SVM more efficient in resolving the small-sample-sizes learning problems
7 Conclusions
To build a more practical objective function for the energyoptimization of biped robots three important constraints are
Mathematical Problems in Engineering 13
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus12
minus10
minus8
minus6
minus4
minus2
0
Join
t tor
que f
or 4
(Nm
)
Figure 11 Joint torque for 1205794 deduced by different control methods
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus10
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Join
t tor
que f
or 5
(Nm
)
Figure 12 Joint torque for 1205795 deduced by different control methods
incorporated into the optimal controller for biped robotsSimulation results demonstrate that the proposed NEO strat-egy effectively decreases the energy consumption of bipedwalking robot In addition the proposed strategy can guaran-tee the force-moment equilibrium equation and the physicallimits of the motors Coulomb friction is applied between theleg and the ground by setting a friction coefficient The bipedrobot can provide optimal joint torques without slippage ortipping over
It is worth noting that most of the existing algorithmsrealize the energy minimization via optimizing gait param-eters However gait parameters such as foot trajectoriesand the trajectories of the COG are not the only aspect
NNSVMThe proposed NEO
1
2
3
4
5
6
7
8
9
10
Join
t tor
que f
or 6
(Nm
)
50 100 150 2000Serial number of the samples
Figure 13 Joint torque for 1205796 deduced by different control methods
to be concerned Other factors such as the forces andmoments acting on the biped robot can also impose onenergy consumption of the biped robot to a large extent Forexample people walking in the mud or in a gale usually feelmore tiredTherefore when the foot trajectories and theCOGtrajectories are determined optimizing the torques of eachjoint is significant for the energy optimization of the wholebiped system This point is verified by simulations and theresults of this work are significant
In this work the proposed neurodynamics-basedmethodis an open-loop controller In the simulation experiments wedo not introduce any error accumulation during the bipedwalking So the simulated robot is able to follow the plannedtrajectories and does not fall However for a real robotsystem there must be error accumulation introduced by themechanical devices In this situation the biped robot tends todeviate from the reference trajectory if there is no feedbackand correction for error compensating Consequently futureworks will include the design of closed-loop controllerswhich are more suitable for real robot systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (Projects 61403264 and 61305098) andby the Natural Science Foundation of Guangdong Province(Project 2016A030310018) Grateful thanks go to Dr Ye Xian-Ming who gives considerable help by means of environmentsupport
14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
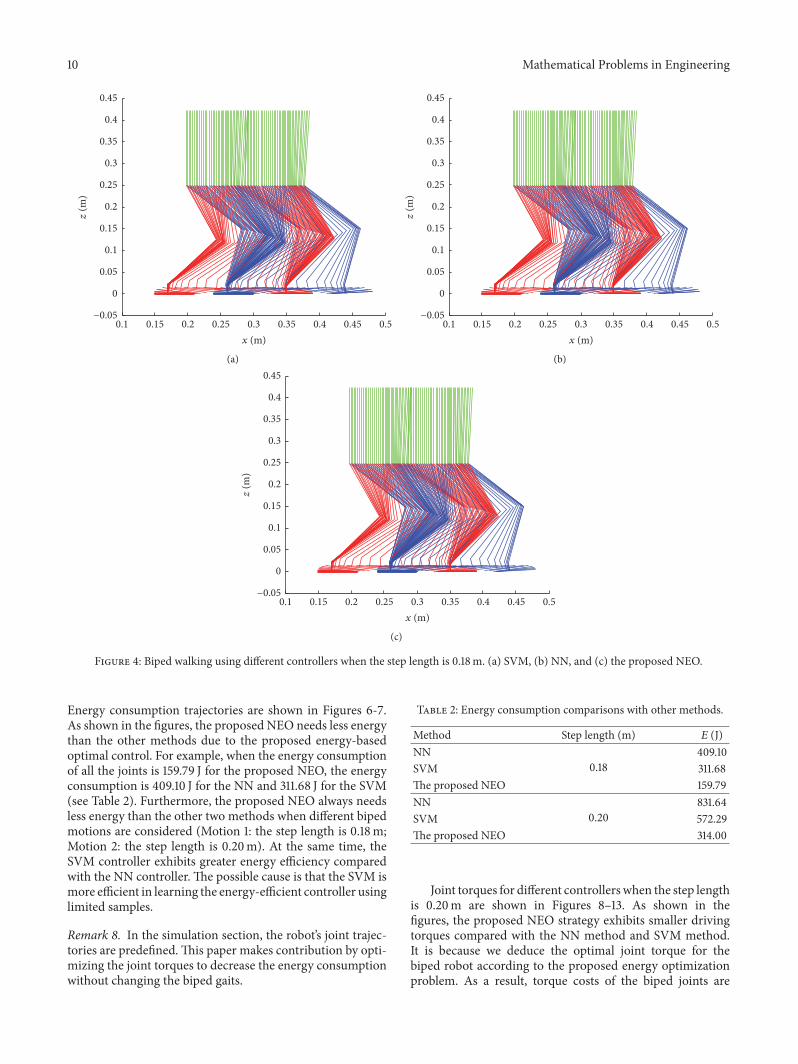
10 Mathematical Problems in Engineering
minus005
0
005
01
015
02
025
03
035
04
045z
(m)
015 02 025 03 035 04 045 0501x (m)
(a)
015 02 025 03 035 04 045 0501x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 0501x (m)
(c)
Figure 4 Biped walking using different controllers when the step length is 018m (a) SVM (b) NN and (c) the proposed NEO
Energy consumption trajectories are shown in Figures 6-7As shown in the figures the proposed NEO needs less energythan the other methods due to the proposed energy-basedoptimal control For example when the energy consumptionof all the joints is 15979 J for the proposed NEO the energyconsumption is 40910 J for the NN and 31168 J for the SVM(see Table 2) Furthermore the proposed NEO always needsless energy than the other two methods when different bipedmotions are considered (Motion 1 the step length is 018mMotion 2 the step length is 020m) At the same time theSVM controller exhibits greater energy efficiency comparedwith the NN controller The possible cause is that the SVM ismore efficient in learning the energy-efficient controller usinglimited samples
Remark 8 In the simulation section the robotrsquos joint trajec-tories are predefinedThis paper makes contribution by opti-mizing the joint torques to decrease the energy consumptionwithout changing the biped gaits
Table 2 Energy consumption comparisons with other methods
Method Step length (m) E (J)NN
01840910
SVM 31168The proposed NEO 15979NN
02083164
SVM 57229The proposed NEO 31400
Joint torques for different controllers when the step lengthis 020m are shown in Figures 8ndash13 As shown in thefigures the proposed NEO strategy exhibits smaller drivingtorques compared with the NN method and SVM methodIt is because we deduce the optimal joint torque for thebiped robot according to the proposed energy optimizationproblem As a result torque costs of the biped joints are
Mathematical Problems in Engineering 11
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(a)
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 05 055 0601x (m)
(c)
Figure 5 Biped walking using different controllers when the step length is 020m (a) SVM (b) NN and (c) the proposed NEO
NNSVMThe proposed NEO
0
100
200
300
400
500
600
700
800
900
Ener
gy co
nsum
ptio
n (J
)
02 04 06 08 10Time (s)
Figure 6 Energy consumption of the robot joints for different controllers when the step length is 018m
12 Mathematical Problems in Engineering
NNSVMThe proposed NEO
02 04 06 08 10Time (s)
0
200
400
600
800
1000
1200
1400
1600
1800
Ener
gy co
nsum
ptio
n (J
)
Figure 7 Energy consumption of the robot joints for differentcontrollers when the step length is 020m
50 100 150 2000Serial number of the samples
5
6
7
8
9
10
11
12
13
14
15
Join
t tor
que f
or 1
(Nm
)
NNSVMThe proposed NEO
Figure 8 Joint torque for 1205791 deduced by different control methods
reduced remarkably This contributes to the effectivenessof the proposed NEO strategy in terms of reducing theenergy consumption of biped robots At the same time theproposed NEO strategy minimizes the energy consumptionand guarantees three necessary constraints simultaneouslyTherefore the force-moment equilibrium equation of bipedrobots is guaranteed and the biped robot does not fall
On the other hand the SVM controller exhibits greaterenergy efficiency (realize the same motion with smaller driv-ing torques) compared with the NN controller The possiblecause is that the number of the learning samples for the NN
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
3
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 2
(Nm
)Figure 9 Joint torque for 1205792 deduced by different control methods
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 3
(Nm
)
Figure 10 Joint torque for 1205793 deduced by different control methods
controllers is not large enough in this work Conventionalmachine learning methods such as NN use empirical riskminimization (ERM) based on infinite samples which is dis-advantageous to the learning control based on small samplesizes for biped robots The SVM is direct implementationof the structural risk minimization (SRM) principle Thisdifference makes SVM more efficient in resolving the small-sample-sizes learning problems
7 Conclusions
To build a more practical objective function for the energyoptimization of biped robots three important constraints are
Mathematical Problems in Engineering 13
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus12
minus10
minus8
minus6
minus4
minus2
0
Join
t tor
que f
or 4
(Nm
)
Figure 11 Joint torque for 1205794 deduced by different control methods
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus10
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Join
t tor
que f
or 5
(Nm
)
Figure 12 Joint torque for 1205795 deduced by different control methods
incorporated into the optimal controller for biped robotsSimulation results demonstrate that the proposed NEO strat-egy effectively decreases the energy consumption of bipedwalking robot In addition the proposed strategy can guaran-tee the force-moment equilibrium equation and the physicallimits of the motors Coulomb friction is applied between theleg and the ground by setting a friction coefficient The bipedrobot can provide optimal joint torques without slippage ortipping over
It is worth noting that most of the existing algorithmsrealize the energy minimization via optimizing gait param-eters However gait parameters such as foot trajectoriesand the trajectories of the COG are not the only aspect
NNSVMThe proposed NEO
1
2
3
4
5
6
7
8
9
10
Join
t tor
que f
or 6
(Nm
)
50 100 150 2000Serial number of the samples
Figure 13 Joint torque for 1205796 deduced by different control methods
to be concerned Other factors such as the forces andmoments acting on the biped robot can also impose onenergy consumption of the biped robot to a large extent Forexample people walking in the mud or in a gale usually feelmore tiredTherefore when the foot trajectories and theCOGtrajectories are determined optimizing the torques of eachjoint is significant for the energy optimization of the wholebiped system This point is verified by simulations and theresults of this work are significant
In this work the proposed neurodynamics-basedmethodis an open-loop controller In the simulation experiments wedo not introduce any error accumulation during the bipedwalking So the simulated robot is able to follow the plannedtrajectories and does not fall However for a real robotsystem there must be error accumulation introduced by themechanical devices In this situation the biped robot tends todeviate from the reference trajectory if there is no feedbackand correction for error compensating Consequently futureworks will include the design of closed-loop controllerswhich are more suitable for real robot systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (Projects 61403264 and 61305098) andby the Natural Science Foundation of Guangdong Province(Project 2016A030310018) Grateful thanks go to Dr Ye Xian-Ming who gives considerable help by means of environmentsupport
14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(a)
015 02 025 03 035 04 045 05 055 0601x (m)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
(b)
minus005
0
005
01
015
02
025
03
035
04
045
z (m
)
015 02 025 03 035 04 045 05 055 0601x (m)
(c)
Figure 5 Biped walking using different controllers when the step length is 020m (a) SVM (b) NN and (c) the proposed NEO
NNSVMThe proposed NEO
0
100
200
300
400
500
600
700
800
900
Ener
gy co
nsum
ptio
n (J
)
02 04 06 08 10Time (s)
Figure 6 Energy consumption of the robot joints for different controllers when the step length is 018m
12 Mathematical Problems in Engineering
NNSVMThe proposed NEO
02 04 06 08 10Time (s)
0
200
400
600
800
1000
1200
1400
1600
1800
Ener
gy co
nsum
ptio
n (J
)
Figure 7 Energy consumption of the robot joints for differentcontrollers when the step length is 020m
50 100 150 2000Serial number of the samples
5
6
7
8
9
10
11
12
13
14
15
Join
t tor
que f
or 1
(Nm
)
NNSVMThe proposed NEO
Figure 8 Joint torque for 1205791 deduced by different control methods
reduced remarkably This contributes to the effectivenessof the proposed NEO strategy in terms of reducing theenergy consumption of biped robots At the same time theproposed NEO strategy minimizes the energy consumptionand guarantees three necessary constraints simultaneouslyTherefore the force-moment equilibrium equation of bipedrobots is guaranteed and the biped robot does not fall
On the other hand the SVM controller exhibits greaterenergy efficiency (realize the same motion with smaller driv-ing torques) compared with the NN controller The possiblecause is that the number of the learning samples for the NN
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
3
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 2
(Nm
)Figure 9 Joint torque for 1205792 deduced by different control methods
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 3
(Nm
)
Figure 10 Joint torque for 1205793 deduced by different control methods
controllers is not large enough in this work Conventionalmachine learning methods such as NN use empirical riskminimization (ERM) based on infinite samples which is dis-advantageous to the learning control based on small samplesizes for biped robots The SVM is direct implementationof the structural risk minimization (SRM) principle Thisdifference makes SVM more efficient in resolving the small-sample-sizes learning problems
7 Conclusions
To build a more practical objective function for the energyoptimization of biped robots three important constraints are
Mathematical Problems in Engineering 13
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus12
minus10
minus8
minus6
minus4
minus2
0
Join
t tor
que f
or 4
(Nm
)
Figure 11 Joint torque for 1205794 deduced by different control methods
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus10
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Join
t tor
que f
or 5
(Nm
)
Figure 12 Joint torque for 1205795 deduced by different control methods
incorporated into the optimal controller for biped robotsSimulation results demonstrate that the proposed NEO strat-egy effectively decreases the energy consumption of bipedwalking robot In addition the proposed strategy can guaran-tee the force-moment equilibrium equation and the physicallimits of the motors Coulomb friction is applied between theleg and the ground by setting a friction coefficient The bipedrobot can provide optimal joint torques without slippage ortipping over
It is worth noting that most of the existing algorithmsrealize the energy minimization via optimizing gait param-eters However gait parameters such as foot trajectoriesand the trajectories of the COG are not the only aspect
NNSVMThe proposed NEO
1
2
3
4
5
6
7
8
9
10
Join
t tor
que f
or 6
(Nm
)
50 100 150 2000Serial number of the samples
Figure 13 Joint torque for 1205796 deduced by different control methods
to be concerned Other factors such as the forces andmoments acting on the biped robot can also impose onenergy consumption of the biped robot to a large extent Forexample people walking in the mud or in a gale usually feelmore tiredTherefore when the foot trajectories and theCOGtrajectories are determined optimizing the torques of eachjoint is significant for the energy optimization of the wholebiped system This point is verified by simulations and theresults of this work are significant
In this work the proposed neurodynamics-basedmethodis an open-loop controller In the simulation experiments wedo not introduce any error accumulation during the bipedwalking So the simulated robot is able to follow the plannedtrajectories and does not fall However for a real robotsystem there must be error accumulation introduced by themechanical devices In this situation the biped robot tends todeviate from the reference trajectory if there is no feedbackand correction for error compensating Consequently futureworks will include the design of closed-loop controllerswhich are more suitable for real robot systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (Projects 61403264 and 61305098) andby the Natural Science Foundation of Guangdong Province(Project 2016A030310018) Grateful thanks go to Dr Ye Xian-Ming who gives considerable help by means of environmentsupport
14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
NNSVMThe proposed NEO
02 04 06 08 10Time (s)
0
200
400
600
800
1000
1200
1400
1600
1800
Ener
gy co
nsum
ptio
n (J
)
Figure 7 Energy consumption of the robot joints for differentcontrollers when the step length is 020m
50 100 150 2000Serial number of the samples
5
6
7
8
9
10
11
12
13
14
15
Join
t tor
que f
or 1
(Nm
)
NNSVMThe proposed NEO
Figure 8 Joint torque for 1205791 deduced by different control methods
reduced remarkably This contributes to the effectivenessof the proposed NEO strategy in terms of reducing theenergy consumption of biped robots At the same time theproposed NEO strategy minimizes the energy consumptionand guarantees three necessary constraints simultaneouslyTherefore the force-moment equilibrium equation of bipedrobots is guaranteed and the biped robot does not fall
On the other hand the SVM controller exhibits greaterenergy efficiency (realize the same motion with smaller driv-ing torques) compared with the NN controller The possiblecause is that the number of the learning samples for the NN
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
3
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 2
(Nm
)Figure 9 Joint torque for 1205792 deduced by different control methods
50 100 150 2000Serial number of the samples
NNSVMThe proposed NEO
4
5
6
7
8
9
10
11
12
13
14
Join
t tor
que f
or 3
(Nm
)
Figure 10 Joint torque for 1205793 deduced by different control methods
controllers is not large enough in this work Conventionalmachine learning methods such as NN use empirical riskminimization (ERM) based on infinite samples which is dis-advantageous to the learning control based on small samplesizes for biped robots The SVM is direct implementationof the structural risk minimization (SRM) principle Thisdifference makes SVM more efficient in resolving the small-sample-sizes learning problems
7 Conclusions
To build a more practical objective function for the energyoptimization of biped robots three important constraints are
Mathematical Problems in Engineering 13
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus12
minus10
minus8
minus6
minus4
minus2
0
Join
t tor
que f
or 4
(Nm
)
Figure 11 Joint torque for 1205794 deduced by different control methods
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus10
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Join
t tor
que f
or 5
(Nm
)
Figure 12 Joint torque for 1205795 deduced by different control methods
incorporated into the optimal controller for biped robotsSimulation results demonstrate that the proposed NEO strat-egy effectively decreases the energy consumption of bipedwalking robot In addition the proposed strategy can guaran-tee the force-moment equilibrium equation and the physicallimits of the motors Coulomb friction is applied between theleg and the ground by setting a friction coefficient The bipedrobot can provide optimal joint torques without slippage ortipping over
It is worth noting that most of the existing algorithmsrealize the energy minimization via optimizing gait param-eters However gait parameters such as foot trajectoriesand the trajectories of the COG are not the only aspect
NNSVMThe proposed NEO
1
2
3
4
5
6
7
8
9
10
Join
t tor
que f
or 6
(Nm
)
50 100 150 2000Serial number of the samples
Figure 13 Joint torque for 1205796 deduced by different control methods
to be concerned Other factors such as the forces andmoments acting on the biped robot can also impose onenergy consumption of the biped robot to a large extent Forexample people walking in the mud or in a gale usually feelmore tiredTherefore when the foot trajectories and theCOGtrajectories are determined optimizing the torques of eachjoint is significant for the energy optimization of the wholebiped system This point is verified by simulations and theresults of this work are significant
In this work the proposed neurodynamics-basedmethodis an open-loop controller In the simulation experiments wedo not introduce any error accumulation during the bipedwalking So the simulated robot is able to follow the plannedtrajectories and does not fall However for a real robotsystem there must be error accumulation introduced by themechanical devices In this situation the biped robot tends todeviate from the reference trajectory if there is no feedbackand correction for error compensating Consequently futureworks will include the design of closed-loop controllerswhich are more suitable for real robot systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (Projects 61403264 and 61305098) andby the Natural Science Foundation of Guangdong Province(Project 2016A030310018) Grateful thanks go to Dr Ye Xian-Ming who gives considerable help by means of environmentsupport
14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus12
minus10
minus8
minus6
minus4
minus2
0
Join
t tor
que f
or 4
(Nm
)
Figure 11 Joint torque for 1205794 deduced by different control methods
NNSVMThe proposed NEO
50 100 150 2000Serial number of the samples
minus10
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Join
t tor
que f
or 5
(Nm
)
Figure 12 Joint torque for 1205795 deduced by different control methods
incorporated into the optimal controller for biped robotsSimulation results demonstrate that the proposed NEO strat-egy effectively decreases the energy consumption of bipedwalking robot In addition the proposed strategy can guaran-tee the force-moment equilibrium equation and the physicallimits of the motors Coulomb friction is applied between theleg and the ground by setting a friction coefficient The bipedrobot can provide optimal joint torques without slippage ortipping over
It is worth noting that most of the existing algorithmsrealize the energy minimization via optimizing gait param-eters However gait parameters such as foot trajectoriesand the trajectories of the COG are not the only aspect
NNSVMThe proposed NEO
1
2
3
4
5
6
7
8
9
10
Join
t tor
que f
or 6
(Nm
)
50 100 150 2000Serial number of the samples
Figure 13 Joint torque for 1205796 deduced by different control methods
to be concerned Other factors such as the forces andmoments acting on the biped robot can also impose onenergy consumption of the biped robot to a large extent Forexample people walking in the mud or in a gale usually feelmore tiredTherefore when the foot trajectories and theCOGtrajectories are determined optimizing the torques of eachjoint is significant for the energy optimization of the wholebiped system This point is verified by simulations and theresults of this work are significant
In this work the proposed neurodynamics-basedmethodis an open-loop controller In the simulation experiments wedo not introduce any error accumulation during the bipedwalking So the simulated robot is able to follow the plannedtrajectories and does not fall However for a real robotsystem there must be error accumulation introduced by themechanical devices In this situation the biped robot tends todeviate from the reference trajectory if there is no feedbackand correction for error compensating Consequently futureworks will include the design of closed-loop controllerswhich are more suitable for real robot systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (Projects 61403264 and 61305098) andby the Natural Science Foundation of Guangdong Province(Project 2016A030310018) Grateful thanks go to Dr Ye Xian-Ming who gives considerable help by means of environmentsupport
14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

14 Mathematical Problems in Engineering
References
[1] K Hirai M Hirose Y Haikawa and T Takenaka ldquoDevelop-ment of Honda humanoid robotrdquo in Proceedings of the 1998IEEE International Conference onRobotics andAutomation Part1 (of 4) pp 1321ndash1326 May 1998
[2] T Mcgeer ldquoPassive Dynamic Walkingrdquo The International Jour-nal of Robotics Research vol 9 no 2 pp 62ndash82 1990
[3] M Vukobratovic and B Borovac ldquoZero-moment pointmdashthirtyfive years of its liferdquo International Journal of Humanoid Roboticsvol 1 no 1 pp 157ndash173 2004
[4] C Zhou X Wang Z Li and N Tsagarakis ldquoOverview ofGait Synthesis for the Humanoid COMANrdquo Journal of BionicEngineering vol 14 no 1 pp 15ndash25 2017
[5] A Amanatiadis ldquoA Multisensor Indoor Localization Systemfor Biped Robots Operating in Industrial Environmentsrdquo IEEETransactions on Industrial Electronics vol 63 no 12 pp 7597ndash7606 2016
[6] L Yang Z Liu and Y Zhang ldquoOnline walking control systemfor biped robot with optimized learning mechanism an exper-imental studyrdquo Nonlinear Dynamics vol 86 no 3 pp 2035ndash2047 2016
[7] J Rosado F Silva V Santos and A Amaro ldquoAdaptive RobotBiped Locomotion with Dynamic Motion Primitives andCoupled Phase Oscillatorsrdquo Journal of Intelligent and RoboticSystems Theory and Applications vol 83 no 3-4 pp 375ndash3912016
[8] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics Systemsvol 43 no 6 pp 1440ndash1450 2013
[9] J J Alcaraz-Jimenez D Herrero-Perez and H Martınez-Barbera ldquoRobust feedback control of ZMP-based gait forthe humanoid robot Naordquo International Journal of RoboticsResearch vol 32 no 9-10 pp 1074ndash1088 2013
[10] S S Ge Z Li and H Yang ldquoData driven adaptive predic-tive control for holonomic constrained under-actuated bipedrobotsrdquo IEEE Transactions on Control Systems Technology vol20 no 3 pp 787ndash795 2012
[11] S Collins A Ruina R Tedrake andMWisse ldquoEfficient bipedalrobots based on passive-dynamic walkersrdquo Science vol 307 no5712 pp 1082ndash1085 2005
[12] J Ackerman and J Seipel ldquoEnergy efficiency of legged robotlocomotion with elastically suspended loadsrdquo IEEE Transac-tions on Robotics vol 29 no 2 pp 321ndash330 2013
[13] H Minakata H Seki and S Tadakuma ldquoA study of energy-saving shoes for robot considering lateral plane motionrdquo IEEETransactions on Industrial Electronics vol 55 no 3 pp 1271ndash1276 2008
[14] J Or ldquoHumanoids grow a spine The effect of lateral spinalmotion on themechanical energy efficiencyrdquo IEEE Robotics andAutomation Magazine vol 20 no 2 pp 71ndash81 2013
[15] Z Liu L Wang C L Philip Chen X Zeng Y Zhang andY Wang ldquoEnergy-efficiency-based gait control system archi-tecture and algorithm for biped robotsrdquo IEEE Transactions onSystems Man and Cybernetics Part C Applications and Reviewsvol 42 no 6 pp 926ndash933 2012
[16] H-K Shin and B K Kim ldquoEnergy-efficient gait planning andcontrol for biped robots utilizing the allowable ZMP regionrdquoIEEE Transactions on Robotics vol 30 no 4 pp 986ndash993 2014
[17] K Erbatur and O Kurt ldquoNatural ZMP trajectories for bipedrobot reference generationrdquo IEEE Transactions on IndustrialElectronics vol 56 no 3 pp 835ndash845 2009
[18] S Fakoorian V Azimi M Moosavi H Richter and D SimonldquoGround Reaction Force Estimation in Prosthetic Legs withNonlinear Kalman Filtering Methodsrdquo Journal of DynamicSystems Measurement ampamp Control 2017
[19] M Moosavi M Eram and A Khajeh ldquoDesign New ArtificialIntelligence Base Modified PID Hybrid Controller for HighlyNonlinear Systemrdquo in International Journal of Advanced Scienceampamp Technology p 57 2013
[20] Y Zhang J Wang and Y Xia ldquoA dual neural network forredundancy resolution of kinematically redundant manipu-lators subject to joint limits and joint velocity limitsrdquo IEEETransactions on Neural Networks vol 14 no 3 pp 658ndash6672003
[21] Y Zhang S S Ge and T H Lee ldquoA unified quadratic-programming-based dynamical systemapproach to joint torqueoptimization of physically constrained redundant manipula-torsrdquo IEEE Transactions on Systems Man and Cybernetics PartB Cybernetics vol 34 no 5 pp 2126ndash2132 2004
[22] Y Zhang ldquoOn the LVI-based primal-dual neural network forsolving online linear and quadratic programming problemsrdquo inProceedings of the 2005 American Control Conference ACC pp1351ndash1356 Portland OR USA June 2005
[23] Z Li Y Xia C-Y Su J Deng J Fu and W He ldquoMissileguidance law based on robust model predictive control usingneural-network optimizationrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 26 no 8 pp 1803ndash18092015
[24] H Xiao Z Li C Yang et al ldquoRobust stabilization of awheeled mobile robot using model predictive control based onneurodynamics optimizationrdquo IEEE Transactions on IndustrialElectronics vol 64 no 1 pp 505ndash516 2017
[25] Z Li S S Ge and S Liu ldquoContact-force distribution opti-mization and control for quadruped robots using both gradientand adaptive neural networksrdquo IEEE Transactions on NeuralNetworks and Learning Systems vol 25 no 8 pp 1460ndash14732014
[26] J Nishii K Ogawa and R Suzuki ldquoThe optimal gait patternin hexapods based on energetic efficiencyrdquo in Proceedings of theProc 3rd Int Symp on Artificial Life and Robotics vol 10 pp106ndash109 Beppu Japan 1998
[27] SMa ldquoTime-optimal control of roboticmanipulatorswith limitheat characteristics of the actuatorrdquo Advanced Robotics vol 16no 4 pp 309ndash324 2002
[28] M H Korayem A Alamdari R Haghighi and A H KorayemldquoDeterminingmaximum load-carrying capacity of robots usingadaptive robust neural controllerrdquo Robotica pp 1ndash11 2010
[29] J Swevers B Naumer S Pieters et al ldquoAn ExperimentalRobot Load Identification Method for Industrial ApplicationrdquoInternational Journal of Robotics Research vol 21 no 12 pp 98ndash107 200
[30] J Xu and L Qiao ldquoRobust adaptive PID control of robotmanip-ulator with bounded disturbancesrdquo Mathematical Problems inEngineering vol 2013 Article ID 535437 2013
[31] L Wang M Chen G Li and Y Fan ldquoData-based controlfor humanoid robots using support vector regression fuzzylogic and cubature Kalman filterrdquo Mathematical Problems inEngineering Article ID 1984634Art ID 1984634 19 pages 2016
[32] M K Totaki R C F P Carvalho R B Letang R SchneiaterW M Moraes and A B Campo ldquoKinematics open loop
Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 15
control of hexapod robot with an embedded Digital SignalController (DSC)rdquo in Proceedings of the 2010 IEEE InternationalSymposium on Industrial Electronics ISIE 2010 pp 3889ndash3893ita July 2010
[33] F Perez-Pena A Morgado-Estevez A Linares-Barranco etal ldquoNeuro-inspired spike-based motion From dynamic visionsensor to robot motor open-loop control through spike-VITErdquoSensors (Switzerland) vol 13 no 11 pp 15805ndash15832 2013
[34] B Vanderborght B Verreist M Van Damme R Van Ham PBeyl and D Lefeber ldquoLocomotion control architecture for thepneumatic biped lucy consisting of a trajectory generator andjoint trajectory tracking controllerrdquo in Proceedings of the 20066th IEEE-RAS International Conference on Humanoid RobotsHUMANOIDS pp 240ndash245 ita December 2006
[35] M Benosman and G Le Vey ldquoJoint trajectory tracking forplanar multi-link flexible manipulator Simulation and exper-iment for a two-link flexible manipulatorrdquo Proceedings-IEEEInternational Conference on Robotics and Automation vol 3 pp2461ndash2466 2002
[36] BWang H Xie D Cong andX Xu ldquoBiped robot control strat-egy and open-closed-loop iterative learning controlrdquo Frontiersof Electrical and Electronic Engineering in China vol 2 no 1pp 104ndash107 2007
[37] H-B Wang and Y Wang ldquoOpen-closed loop ILC correctedwith angle relationship of output vectors for tracking control ofmanipulatorrdquo Acta Automatica Sinica Zidonghua Xuebao vol36 no 12 pp 1758ndash1765 2010
[38] L Wang Z Liu C L P Chen Y Zhang S Lee and XChen ldquoEnergy-efficient SVM learning control system for bipedwalking robotsrdquo IEEE Transactions on Neural Networks andLearning Systems vol 24 no 5 pp 831ndash837 2013
[39] Z Liu and C Li ldquoFuzzy neural networks quadratic stabilizationoutput feedback control for biped robots via Hinfin approachrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 33 no 1 pp 67ndash84 2003
[40] LWang Z Liu P Chen Y Zhang S Lee andX Chen ldquoAUKF-based predictable SVR learning controller for biped walkingrdquoIEEE Transactions on Systems Man and Cybernetics SystemsPart A vol 43 no 6 pp 1440ndash1450 2013
[41] L Wang Z Liu C L Philip Chen Y Zhang S Lee and XChen ldquoFuzzy SVM learning control system considering timeproperties of biped walking samplesrdquo Engineering Applicationsof Artificial Intelligence vol 26 no 2 pp 757ndash765 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of