conservazione della quantità di moto
DESCRIPTION
lungo l'asse z (la verticale) le coordinate dei due corpi non cambiano col tempo. Le forze che agiscono sono: F12 esercitata dalla persona sul carrello (verso –x) F21 esercitata sulla persona dal carrello (verso +x) P esercitata sul suolo R esercitata dal suolo - PowerPoint PPT PresentationTRANSCRIPT

04/19/23 1
Conservazione della quantità di moto
un carrello di massa m1 può
scorrere sopra un superficie orizzontale levigata, sopra il carrello si trova una persona di massa m
2
inizialmente persona e carrello sono in quiete rispetto al suolo
ad un certo punto la persona si mette a camminare lungo il piano del carrello
Fra suola e carrello c’e’ attrito.
• lungo l'asse z (la verticale) le coordinate dei due corpi non cambiano col tempo.
• Le forze che agiscono sono:
– F12 esercitata dalla persona sul carrello (verso –x)
– F21 esercitata sulla persona dal carrello (verso +x)
– P esercitata sul suolo
– R esercitata dal suolo
• lungo l'asse x per azione/reazione
• F12+F21 =0 = m1v1 +m2v2 = 0
• v1/v2 = m2/m1 quindi se m1~ ∞
• v1~ 0 il carrello rimane ~fermo
Z
v1
v2

04/19/23 2
poiche’ la risultante delle forze e’ zero Q tot = 0 . Pero’ il moto relativo in presenza di Fij dovrebbe essere accelerato. In realta’ a parte lo “spunto” iniziale la velocita’ di carrello e persona e’ costante. Questo perche’ il moto e’ un moto di “stop &go” . Lo slancio iniziale fornito dal piede destro viene perso al momento in cui viene posato al suolo il piede sinistro. In questo secondo istante il moto relativo si annulla perche’ i versi di F12 e F21 si invertono . F12 ha verso +x , F21 ha verso –x. F12 ferma il carrello e F21 ferma l’uomo Il moto riprende con lo slancio sul piede sinistro. Se Dt e’ il tempo tra i due atti (slancio destro-arresto sinistro) lo spazio percorso in ogni Dt e’ Ds = ½ (F/m) Dt2 V = F/m Dt Dopo n passi il tempo trascorso e’ nDt e lo spazio percorso e’ nDs . La velocita’ media e’ V = nDs/nDt = cost = F/m Dt = costOvviamente essa dipende , a parita’ di lunghezza del passo, dalla frequenzadei passi : n = 1/Dt . Piu’ alta la frequenza, minore Dt , maggiore V (ma semprecostante)
04/19/23 3
Esercizio
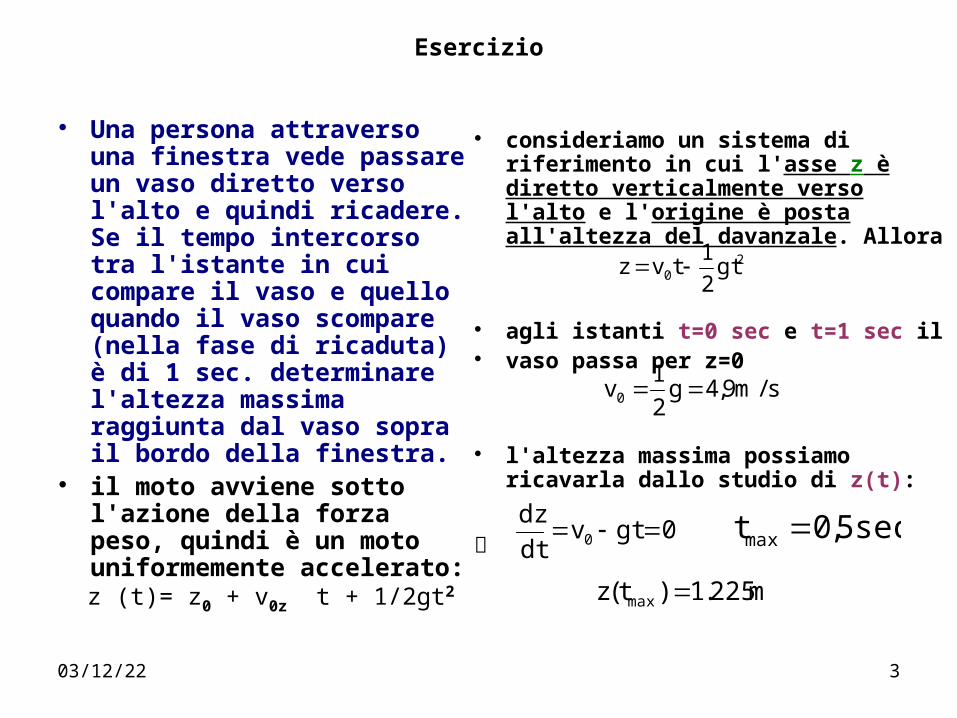
Una persona attraverso una finestra vede passare un vaso diretto verso l'alto e quindi ricadere. Se il tempo intercorso tra l'istante in cui compare il vaso e quello quando il vaso scompare (nella fase di ricaduta) è di 1 sec. determinare l'altezza massima raggiunta dal vaso sopra il bordo della finestra.
il moto avviene sotto l'azione della forza peso, quindi è un moto uniformemente accelerato:
consideriamo un sistema di riferimento in cui l'asse z è diretto verticalmente verso l'alto e l'origine è posta all'altezza del davanzale. Allora
agli istanti t=0 sec e t=1 sec il vaso passa per z=0
l'altezza massima possiamo ricavarla dallo studio di z(t):
z (t)= z0 + v0z t + 1/2gt2
20 gt
2
1tvz
s/m9,4g2
1v0
0gtvdt
dz0 sec5,0tmax
m225.1)t(z max

04/19/23 4
La forza esercitata dall'uomo è uguale (in modulo) alla reazione vincolare del pavimento. Consideriamo un sistema di riferimento con l'asse z rivolto verso l'alto L’uomo e’ soggetto alla reazione
vincolare R(che potrebbe essere misurata da una bilancia) e al proprio peso P.
Un uomo di massa 90 kg si trova su di un ascensore. Determinare la forza esercitata dall'uomo sul pavimento quando:
a) l'ascensore sale con velocità costanteb) l'ascensore scende con velocità costantec)l'ascensore accelera verso l'alto con aa = 3 m/s2d) l'ascensore accelera verso il basso con aa = 3m/sec2e) il cavo si spezza e l'ascensore cade liberamente
a) l'accelerazione dell‘uomo è nulla ma =R + P = 0 R =882 N = PESOb) Lo stesso.
c) l’accelerazione non e’ nulla a>0ma = R + P = R –mgR= m (g+a) =1152 N > del peso
d) Idem a < 0 - ma= R – mg R = m(g-a)= 612 N < del peso
e) l’accelerazione e’ a = -g-mg = R –mg R= 0 assenza di peso

04/19/23 5
Esercizio Due masse m1 e m2 sono appese come in figura con fili inestensibili e di massa trascurabile.
Calcolare i valori delle tensioni T1 e T2.
Si taglia il filo 1, durante la caduta il filo 2 è teso?
La fune 1 deve sostenere m1 e m2T1 + (m1+m2)g = 0
La fune 2 sostiene solo m2T2 + m2g = 0
Se si taglia la fune 1 i due corpi Cadono con la stessa gSu m1 T1+m1g +T2 = m1g T1 = 0 dunque T2 = 0
Oppure T2+m2g = m2g T2=0
bz
Si supponga che la fune ,lunga L, abbia massa con densita’ lineare λ = m/L Kg/m.Il segmento di lunghezza db e coordinata z = b deve sostenere la massa m e il pesoDel tratto di fune lungo (L-b).La tensione in b e’T = -mg – λ (L-b) g Se la fune ha massa la tensione dipendedalla posizione T(z) = -mg – λ (L-z) g E’ massima a z=0 e minima per z=L

04/19/23 6
Esercizio Due masse uguali, collegate da un
filo ideale, sono disposte come in figura. All'istante t=0 il sistema viene lasciato libero di muoversi e si osserva che la massa sospesa (1) scende. Note:
θ= 30° h = 1 m μD = 0.4
• calcolare la distanza totale percorsa in salita dalla massa che si trova sul piano inclinato
La fune e’ ideale , la sua tensione e’ Uniforme, la sua massa nulla (non ha Inerzia).Il filo e’ inestensibile : v1 = v2 e a1= a2
Su 1 agiscono il peso e la tensionema1 = mg + T1 (sono vettori)
Su 2 il peso,la tensione, la reazione normale del piano , l’attrito.ma2 = mgp +mgn + Rn + μ m gn +T2
Posto mgn = mg cosθ mgp =mg sinθsi puo’ trsformare il moto in un moto “lineare”
h
mgT T μ
RnX
mg sinθmg cosθ
mg cosθ

04/19/23 7
Moto di 1)-ma = - mg +T
Moto di 2
-ma = mg (sinθ + μ cosθ) - T
Sommando si ricava aa = ½ g (1- sinθ - μ cosθ) = 0,75 m/sec21 si arresta dopo aver percorso il tratto h cioe’ al tempo t per cui h =1/2 a t2 quando ha velocita’ V = - (2ah)1/2 = - 1.23 msec.A questo punto 2 ha la velocita’ V ed e’ frenato da F = mg (sinθ + μ cosθ)
La accelerazione di 2 e’ costante e vale a’ = g (sinθ + μ cosθ) = 8,29 m/sec2La sua velocita’ v(t) = V + a’ t e vale zero per t = -V/a’Quando 2 ha percorso s = Vt + ½ a’ t2 = 0.09 m Cui va aggiunto il tratto h percorso insieme ad 1.
h
mgT T μ
RnX
mg sinθmg cosθ
mg cosθ

04/19/23 8
TensioneMax.
Tensione~ nulla
T1T2 +FaR
ds
dθ
r
Adθ
Nel punto A della corda ,che non scorre a causa dell’attrito,oppure ,se si vuole sul tratto ds = r dθ, agiscono le forze T1, T2 e Fa l’attrito generato dalla pressione della risultante T1+T2. Poiche’ ds e’ fermo deve essere in modulo T = T1 = T2 + Fa la risultante delle forze T1 + (T2 + Fa) e’ un vettore diretto versoIl centro e di modulo R = 2T1 dθ = 2 T dθ Quindi Fa = 2 μ T dθds e’ in equilibrio (fermo) se F = T - 2 μ T dθ – T2 = 0Dal che si conclude che T2 < T e si puo scrivere dT = T2-T = - 2 μ T dθ e ottenere l’equazione dT(θ) / dθ = - 2 μ T(θ)
Che ha come soluzione T(θ) = T0 e (-2 μ θ)
la tensione della fune diminuisce exp con l’angolo di avvolgimento

04/19/23 9
Forza elastica moto rettilineo sotto l'azione di
una forza elastica: consideriamo una molla
una estremità è fissata un sistema di
riferimento con l'asse x parallelo all'asse della molla
O indica la posizione di riposo della molla
può essere allungata o compressa
l0: lunghezza a riposo
l: lunghezza generica l'allungamento è:
quando l≠l0 agisce una forza di richiamo
che tende a riportare l'estremità della molla nella posizione di riposo
tale forza è proporzionale all'allungamento:
con k>0
k viene detta costante elastica della molla
x = l−l0
F = −kx
[k] = [m l t-2 l-1]=[mt-2]

04/19/23 10
Forza elastica
dal secondo principio di Newton ricaviamo:
dove si è posto
ω ha dimensioni [T-1] k ha dimensioni [M] [T-2] ω 2 ha dimensioni [M][T-2] [M-1] = [T-2]
ω si chiama pulsazione questa equazione è una
equazione differenziale di secondo grado, lineare, omogenea e a coefficienti costanti, la soluzione generale di questa equazione è:
X(t)= A sin (ω t + f0)
con A e f 0 costanti reali.
Infatti
d2x/dt2= - ω 2 x
è un moto periodico
d2x/dt2 + ω2x = 0
ω = k/m
−kx = md2xdt2

04/19/23 11
X(t)= A sin (ω t + f ) dove A e f sono due costanti
A è il valore massimo raggiungibile da X = ampiezza dell'oscillazioneX varia tra –A e + A Si supponga che per t = 0 X = 0 si ha f = 0
SIN θ ha periodo 2 π X assume lo stesso valore ( per es. +A) per t1 = (π/ 2)/ ω t2 = 5 ((π/ 2)/ ω) t3 = 9 ((π/ 2)/ ω) Cioe’ ogni T = 2 π / ω sec.
V = dx/dt = A ω cos (ω t) e’ massima per t = 0 o t = n π/ ωCioe’ quando x = 0 al centro dell’oscillazioneV = 0 per t = (2n+1)(π/ 2)/ ω cioe’ quando X = +- A
a = d2X/dt2 = - ω2 X quindi a e’ nulla quando V = max e massima Quando V = 0 agli estremi dell’oscillazione

04/19/23 12
Un’equazione analoga descrive il moto del pendolo semplice.
Per piccoli angoli (<10 0) sinθ ~ θ
L’unica forza efficace e’ mgθ e’ dovra’Essere
mg θ = - m d2s/dt2 con s = lunghezza d’arco = Lθ
mg θ = - m L d2θ/dt2
d2θ/dt2 = - g/L θ
La soluzione e’ θ (t) = θ0 sin (ωt + f)
d2θ/dt2 = - ω2 θ0 sin (ωt + f) =-ω2θIl moto si ripete ogni volta che t = T = 2π/ω = periodo dell’oscillazione = 2 π (L/g)1/2.
Osservare che T non dipende da θ0 ,che e’ l’ampiezza dell’oscillazione, ma solo
da L e g.
θ
gcosθgsinθ
L

04/19/23 13
ALTRE OSSERVAZIONI
θ (t) = θ0 sin (ωt + f) per t= 0 θ = θ0 < 0 quindi f = π/2
La velocita’:
dθ/dt = θ0 ω cos (ωt + π/2) e’ nulla per t = 0 ed e’ max per ωt =π/2
quando θ(t) = 0
L’accelerazione:
d2θ/dt2 = - ω2 θ0 sin (ωt +π/2 ) e’ massima per t=0 (quando e’ nulla la
Velocita’ ) e nulla per ωt =π/2 quando θ = 0
Si noti anche che la tensione della fune deve compensare la componente di g
lungo il filo e fornire l’accelerazione centripeta, che vale v2/L = (dθ/dt )2 L
Quindi la Tensione vale T = mg sin θ0 alla max. elongazione (dθ/dt =0) e
T = m θ02ω2 L + mg al passaggio per θ = 0
Alla conclusione che il periodo dell’oscillazione fosse proporzionale a (L/g) ½
si poteva arrivare con semplici considerazioni dimensionali. Il Periodo ha le dimensioni di un tempo : le grandezze in gioco sono L, g, m .
L’unica combinazione che abbia e dimensioni di un tempo e’ (L/g)1/2

04/19/23 14
Lavoro di una forzaSi definisce come lavoro della forza F applicata al punto P che si sposti di dsil prodotto scalare dei vettori F e ds
dL = F ds = F ds cosθ
Il lavoro si misura in Joule (J) 1 J = 1N 1m
Notare che, per definizione dL = F ds = m dv/dt vdt = m v dv = d (1/2 m v2)
ATTENZIONE: La forza F compie il lavoro dL = F ds indipendentemente dalla causa dello spostamento di P ,che potrebbe anche non essere dovuto a F, ma semplicemente perche’ P si sposta.
Se il punto P si sposta da P1 a P2 lungo ilCammino s il lavoro sara’
L = dove l’integrale va eseguito
lungo la linea s. F puo’ dipendere ovviamentedalla posizione lungo s.
2P
1P
dsF

04/19/23 15
dL = F ds = Fx dx + Fy dy + Fz dz
Il lavoro di Fx se P si sposta da X1 a X2 e’
L = 2X
1X
xdxF
Per il principio di sovrapposizione delle forzeIl lavoro di n Forze applicate in P che si spostadi ds e’ la somma dei lavori delle singole forzeche e’ uguale al lavoro della forza risultante.

04/19/23 16
Calcolo di alcuni lavori
Sollevamento a velocita’ costante da z1 a z2 V= cost F – mg = 0 F e mg sono costanti
dLF = Fdz LF = F (z2-z1)
dL g = - mg dz = -mg (z2-z1)
Il lavoro totale e’ nullo : d (1/2m v2) = 0 v = cost
z1
z2
mg
F
m viene lasciato cadere liberamente da z2 a z1L = - mg (z1 –z2) >0 perche’ F e ds sono concordi dL = d (1/2m v2) L = (1/2mv2)fin – (1/2mv2) iniz
Attrito F = μ mgIl corpo si arresta dopo S S
dL = - μ mg ds ds e’ positivo,F e’ in verso oppostoL = - μ mg S = (1/2mv2)fin – (1/2mv2) iniz = – (1/2mv2) iniz perche’ Vfin =0Lo spazio di frenata dipende dal quadrato della velocita’.
04/19/23 17
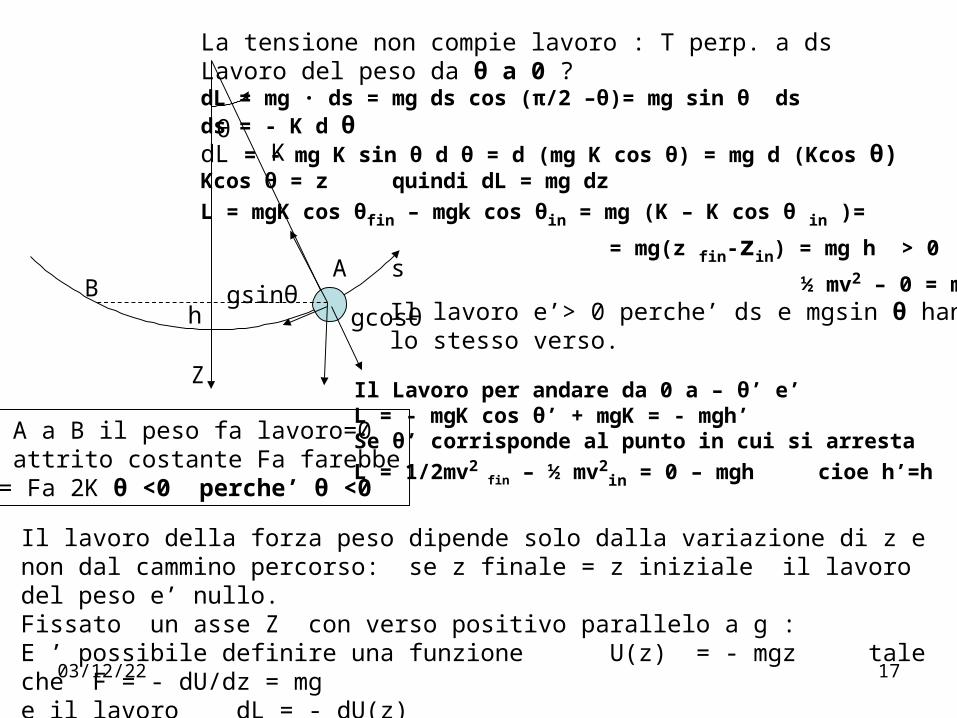
La tensione non compie lavoro : T perp. a dsLavoro del peso da θ a 0 ?dL = mg ∙ ds = mg ds cos (π/2 –θ)= mg sin θ dsds = - K d θ dL = - mg K sin θ d θ = d (mg K cos θ) = mg d (Kcos θ)Kcos θ = z quindi dL = mg dz
L = mgK cos θfin – mgk cos θin = mg (K – K cos θ in )=
= mg(z fin-zin) = mg h > 0
½ mv2 – 0 = mgh
Il lavoro della forza peso dipende solo dalla variazione di z e non dal cammino percorso: se z finale = z iniziale il lavoro del peso e’ nullo. Fissato un asse Z con verso positivo parallelo a g :E ’ possibile definire una funzione U(z) = - mgz tale che F = - dU/dz = mg e il lavoro dL = - dU(z)
Z
Il lavoro e’> 0 perche’ ds e mgsin θ hannolo stesso verso.
Il Lavoro per andare da 0 a – θ’ e’ L = - mgK cos θ’ + mgK = - mgh’Se θ’ corrisponde al punto in cui si arresta
L = 1/2mv2 fin – ½ mv2
in = 0 – mgh cioe h’=h
θ
gcosθgsinθ
K
h
sAB
Da A a B il peso fa lavoro=0Un attrito costante Fa farebbeL = Fa 2K θ <0 perche’ θ <0

04/19/23 18
Caso della molla : F = -kx dL = F dx = - kx dx = d (- ½ kx2)
L = -1/2 K ( x2fin – x2 iniz) il lavoro dipende solo dai valori iniziali e finali di X
Si definisce U (x) = ½ kx2 e si ha F = - dU/dx dL = -dU
Nel caso della forza di gravitazione
F = (G M m /r3) r e’facile mostrareche il lavoro di F dipende solo da rfin-rin
e che e’ possibile definire U = - GMm/r tale che F = -dU/dr dL = - dU
Nel caso della forza elettrica F = (K Q1Q2/r3) r U = -kQ1Q2/r
Poiche’ ,per definizione, dL = d (1/2 mv2) = d Ek Ek = Energia Cinetica
Si ha anche dL = -dU = dEk cioe’ dU + dEk = 0 U + Ek = cost
Le forze che hanno la proprieta’ di compiere un lavoro nullo lungo un camminochiuso sono dette conservative .La funzione U prende il nome di energia potenziale Notare che F e’ un vettore e U e’ uno scalare

04/19/23 19
Una forza si dice conservativa se il suo lavoro non dipende dal percorso ma soloposizione iniziale e finale. Ovvero se l’integrale di F ds su una curva chiusa e‘ nullo.Cio’ e’ equivalente a dire che Fds e’ il differenziale esatto di una funzione U dellaposizione. dL = F ds = - dU(x,y,z) in questo caso infatti il lavoro da F tra P1 e P2 valeL = - [U(P2) – U(P1)].Poiche’ F ds = Fx dx + Fy dy + Fz dz e’ anche Fx = -dU/dx, Fy = - dU/dy , Fz = -dU/dz
E chiaro che la quantita misurabile e’ la variazione di U , e non il suo valore assoluto.Infatti e’ possibile misurare L attraverso la variazione di energia cinetica , o Fx con dinamometri a o misure di accelerazione : il valore di U e’ sempre noto a menodi un termine costante U = U + Uo con dUo = 0.
D’altra parte lo stesso vale per Ek = q2/2m: la quantita’ di moto ( o la velocita’ ) e’ sempre definita a meno di una costante che rappresenta la parte di q dovuta allo stato di moto rettilineo uniforme del riferimento.
In definitiva [U + Ek] e’ definita a meno di una costante.
04/19/23 20
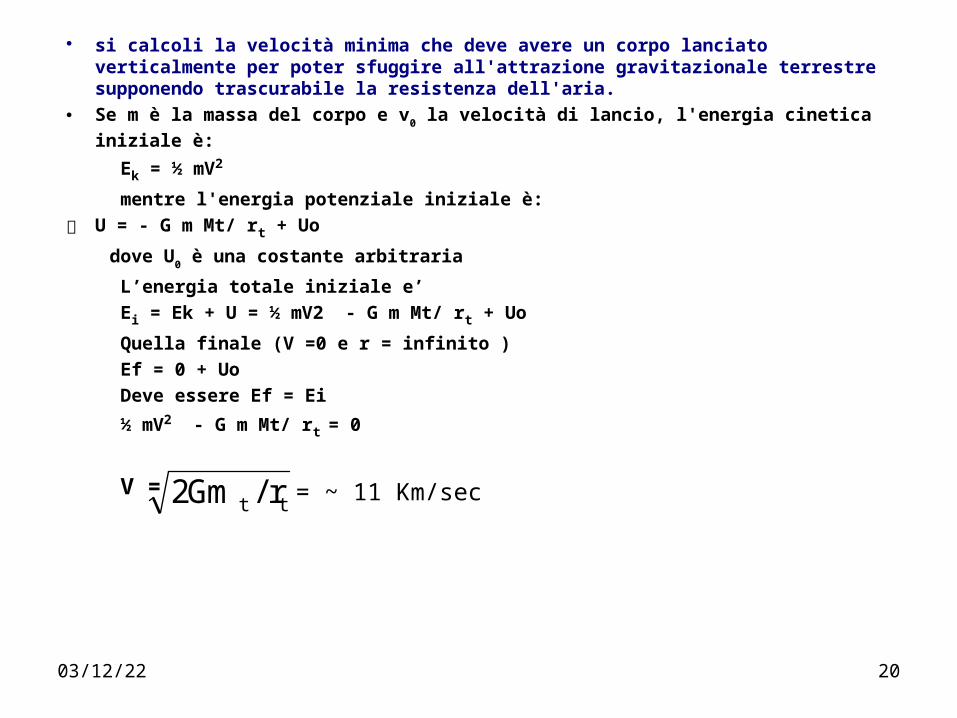
si calcoli la velocità minima che deve avere un corpo lanciato verticalmente per poter sfuggire all'attrazione gravitazionale terrestre supponendo trascurabile la resistenza dell'aria.
Se m è la massa del corpo e v0 la velocità di lancio, l'energia cinetica iniziale è:
Ek = ½ mV2
mentre l'energia potenziale iniziale è:
U = - G m Mt/ rt + Uo
dove U0 è una costante arbitraria
L’energia totale iniziale e’
Ei = Ek + U = ½ mV2 - G m Mt/ rt + Uo
Quella finale (V =0 e r = infinito )
Ef = 0 + Uo
Deve essere Ef = Ei
½ mV2 - G m Mt/ rt = 0
V = tt r/Gm2 = ~ 11 Km/sec

04/19/23 21
una cassa viene posta sulla sommità di un piano inclinato scabro (μd = 0.2), di
altezza h = 4 m e inclinato di un angolo θ = 30° rispetto all'orizzontale. Si calcoli il modulo v della velocità che la cassa possiede quando arriva in fondo al piano inclinato.
L’energia cinetica iniziale e’ nulla . La variazione di energia cinetica e’ uguale al lavoro delle forze.
Il lavoro del peso e’ L = mgh >0 La forza di attrito vale Fa = μ mg cos θ ed e’ costante . Il suo lavoro e ‘ La = Fa S negativo perche’ forza e spostamento hanno versi opposti S e’ la lunghezza del piano S = h/ sin θ e La= -μ mg h cosθ/sin θ L tot = mgh ( 1 – μ cosθ/sin θ ) = ½ m v2 da cui V = 7,2 m/sec
04/19/23 22
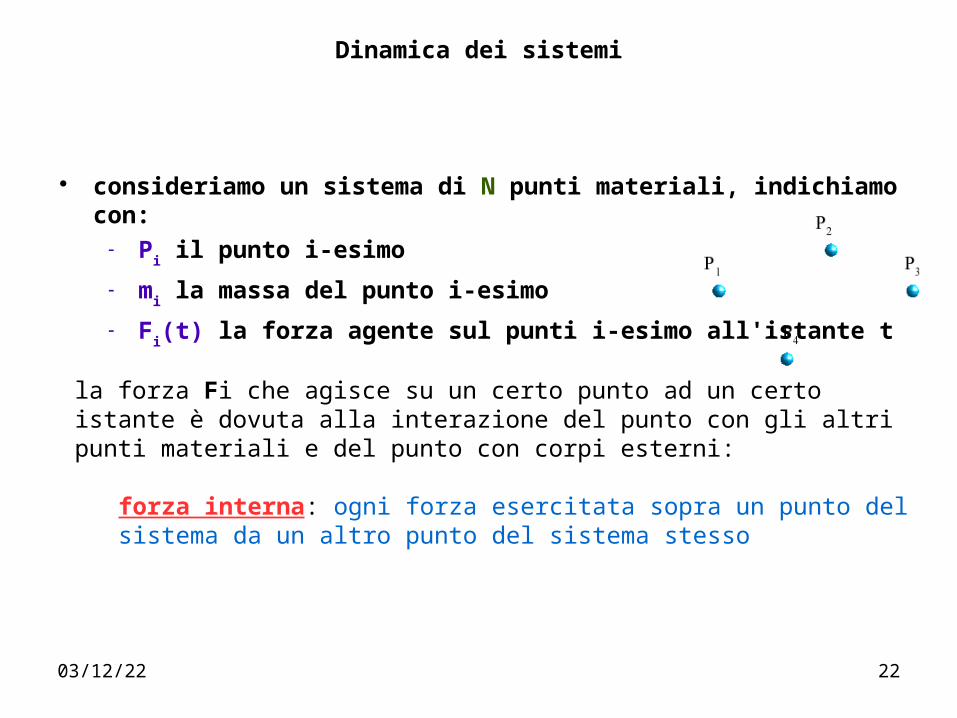
Dinamica dei sistemi
consideriamo un sistema di N punti materiali, indichiamo con: P
i il punto i-esimo
mi la massa del punto i-esimo
Fi(t) la forza agente sul punti i-esimo all'istante t
la forza Fi che agisce su un certo punto ad un certo istante è dovuta alla interazione del punto con gli altri punti materiali e del punto con corpi esterni:
forza interna: ogni forza esercitata sopra un punto del sistema da un altro punto del sistema stesso

04/19/23 23
Forze interne ed esterne
per distinguere il contributo delle forze indichiamo con
Fi,j forza di Pj su Pi
FiI la risultante delle forze interne agenti sul
punto i-esimo Fi
E la risultante delle forze esterne agenti sul
punto i-esimo la forza totale agente sul punto i-esimo sarà
allora:
N
)ij(1jj,i
Ii FF
Ei
Iii FFF
se consideriamo la forza che il punto Pi esercita sul punto Pj, dal principio di
azione-reazione ricaviamo che
otteniamo:
ad ogni istante la risultante di tutte le forze interne agenti in un sistema materiale è nulla
quindi:
i,jj,i FF
0FI
N
1ii
E FF

04/19/23 24
Dinamica dei sistemi
l'equazione del moto del punto Pi è: iiEi
Iii amFFF
∑i=1
N
F i = ∑i=1
N
miai = ∑i=1
N
mi
d v i
dt=
ddt ∑i=1
N
miv i = F E
e quindi:
la somma di tutte le forze agenti risulta allora:
a causa delle forze interne, la forza agente su ogni punto materiale dipenderà dalla posizione e velocità di ogni altro punto materiale
N
1jii
N
1ji amF

04/19/23 25
ad ogni istante la risultante di tutte le forze esterne agenti su un sistema materiale è uguale alla derivata rispetto al tempo della quantità di moto totale del sistema
Dinamica dei sistemi
Qi = miv i
Q = ∑i=1
N
Qi = ∑i=1
N
miv i
F E =d Qdt
la quantità di moto totale di un sistema materiale isolato è costante nel tempo
viene chiamata quantità di moto totale del sistema, possiamo allora scrivere:
è la quantità di moto del punto Pi, la somma

04/19/23 26
Si immagini un insieme di n masse mi nello spazio : su di ognuna di esse agisce la forza di gravita’ dovuta alla terra, FORZA ESTERNA,
ma anche la forza di gravita’ reciproca fra le masse.FORZE INTERNE
Le masse acquisteranno tutte una stessa accelerazione verso la terra . ed una accelerazione le une verso le altre dovuta alla mutua attrazione.
A causa della forza esterna dQi/dt = G mi Mt/r2 (assumendo che le dimensioni del sistema di n masse sia piccolo rispetto a r )dQ/dt = Σ dQi/dt = G Mt/r2 x Σ mi = FE notare che Σ mi e’ la massa totale.
Poiche’ le attrazioni interne a due a due sono eguali e opposte , egualie opposte sono le variazioni delle loro QdM , la cui somma totale e’ quindinulla . In conclusione il sistema ha un moto collettivo verso la terra la cui QdM varia secondo la dQ/dt = Σ DQi/dt = G Mt/r2 x Σ mi diversa da zero , e un moto indipendente di contrazione dovuto alla mutua interazione per cui la somma vettoriale delle DQij /dt e’ nulla.

04/19/23 27
Dinamica dei sistemi poiché v = dr/dt possiamo scrivere:
Q = ∑i=1
N
miv i =ddt ∑i=1
N
miOPi
OG =∑i=1
N
miOPi
∑i=1
N
mi
=∑i=1
N
miOPi
m
OPi è il vettore posizione che da la posizione
del punto materiale Pi
consideriamo il punto G dello spazio dato dalla equazione
dove m è la somma delle masse di tutti i punti materiali

04/19/23 28
Centro di massa
la posizione del punto G è la media ponderata delle posizioni dei vari punti i relativi pesi sono i rapporti mi/m
il punto G così definito viene chiamato centro di massa o baricentro del sistema se deriviamo rispetto al tempo l'equazione che da la posizione del centro di
massa otteniamo:
v G =∑i=1
N
miv i
m
la quantità di moto totale del sistema è uguale al prodotto della massa totale del sistema per la velocità del centro di massa:
Q = ∑i=1
N
miv i = mv G
ricordando che la risultante di tutte le forze esterne è uguale alla derivata rispetto al tempo della quantità di moto totale otteniamo:
dove aG indica l'accelerazione del centro di massa
GG)E( ma
dt
)mV(d
dt
dQF

04/19/23 29
Archimede e’ famoso per la frase “datemi un punto d’appoggio e sollevero’Il mondo” . Data una forza F ed un punto O nello spazio si puo’ definire il prodotto vettoriale M= R X F = momento della forza F rispetto al polo O.Un momento produce una rotazione:data la leva L (di massa nulla) con fulcro in O e le due masse m1 e m2 Archimede trova che si ha equilibrio (assenza di moto) se
d2Xm2g + d1Xm1g = 0
a) d1X m1g = ( r1 –L)X m1g
b) d2X m2g = (r2 – L) X m2g
La somma a+b deve dare zeror1Xm1g + r2Xm2g = (m1+m2) LXg(m1r1 + m2r2)Xg = (m1 + m2) LXg
L(m1+m2) = m1r1 + m2r2 L = (m1r1 +m2r2) / (m1+ m2)
L e’ il raggio vettore del Centro di Massa o “baricentro” = centro dei pesiO e’ il punto sul quale il vincolo esercita la forza (m1+m2)g in modo chela leva non ruoti (cioe’ sia in equilibrio). Da qui il nome “centro di massa”
d1d2
m1 g
m2g
r1r2
O
L

04/19/23 30
Teorema del centro di massa
Teorema del moto del centro di massa: il centro di massa di un sistema materiale si muove come un punto materiale di massa uguale alla massa totale del sistema e soggetto ad una forza uguale alla risultante delle forze esterne agenti sopra il sistema
il centro di massa ha una importanza particolare per un sistema di punti materiali
permette di descrivere il moto del sistema senza dover conoscere il dettaglio dei componenti del sistema
questo vale per i corpi estesi, corpi che si possono considerare come l'insieme di un numero infinito di punti materiali vicini tra di loro

04/19/23 31
Impulso
2
1
2
1
t
t
t
t
21 vdmFdt)t,t(I
Per una forza costante F si definisce come IMPULSO I (t1,t2) della forza tra t1 e t2 come il prodotto della forza per il tempo in cui ha agito
I (t1,t2) = F Δ t L’impulso e’ un vettore che ha la stessa direzione della Forza e si misura in N sec.
Se la forza non e’ costante l’impulso e’ dato dall’integrale
)t(q)t(q))t(V)t(V(m)tt(I 12122,1
La somma degli impulsi di tutte le forze agenti su un punto materiale e’ uguale all’impulso della forza risultante.
Teorema dell'impulso: l'impulso di una forza in un certo intervallo di tempo è uguale alla variazione, in quell'intervallo di tempo, della quantità di moto del corpo sul quale agisce la forza