conception mécanique – calculs de roulements à …marc.maldonado.free.fr/cours/pdf/td/dossier...
TRANSCRIPT

Conception mécanique – calculs de roulements à contacts obliques_______
BOITE DE VITESSES
La boîte de vitesses est située en bout d’un moteur transversal pour
véhicule à traction. Ainsi placée, elle offre les avantages de minimiser la
longueur hors tout des véhicules et d‘accroître le volume intérieur de
l‘habitacle.

La bo î t e d e v i t e s s e s é qu i p e l e s v éh ic u l e sPeugeot : 206 - 306 - 307 - 406 - 806- 807 PARTNER - EXPERT Citroën : C15 - XSARA - XANTIA - C3 - C5 BERLINGO - PICASSO - EVASION – C8...
La boîte de vitesses permet d’utiliser au mieux la puissance du véhicule.
Elle est constituée d’une suite d’engrenages élémentaires à dentures hélicoïdales, montée surdeux arbres parallèles (l’arbre primaire, l’arbre secondaire) et d’une ligne pont.
Par ce jeu d‘engrenages, elle permet une démultiplication du couple fourni par le moteur pouradapter la puissance de la voiture aux conditions de circulation.
Un pignon appelé pignon intermédiaire (ou baladeur) permet d’inverser le sens de rotation des rouespour la marche arrière.
Au Point Mort elle assure de façon permanente la séparation des roues et du moteur.
Marche arrière engagéeVitesse avant engagée
La ligne secondaireLa ligne pontLa ligne primaire

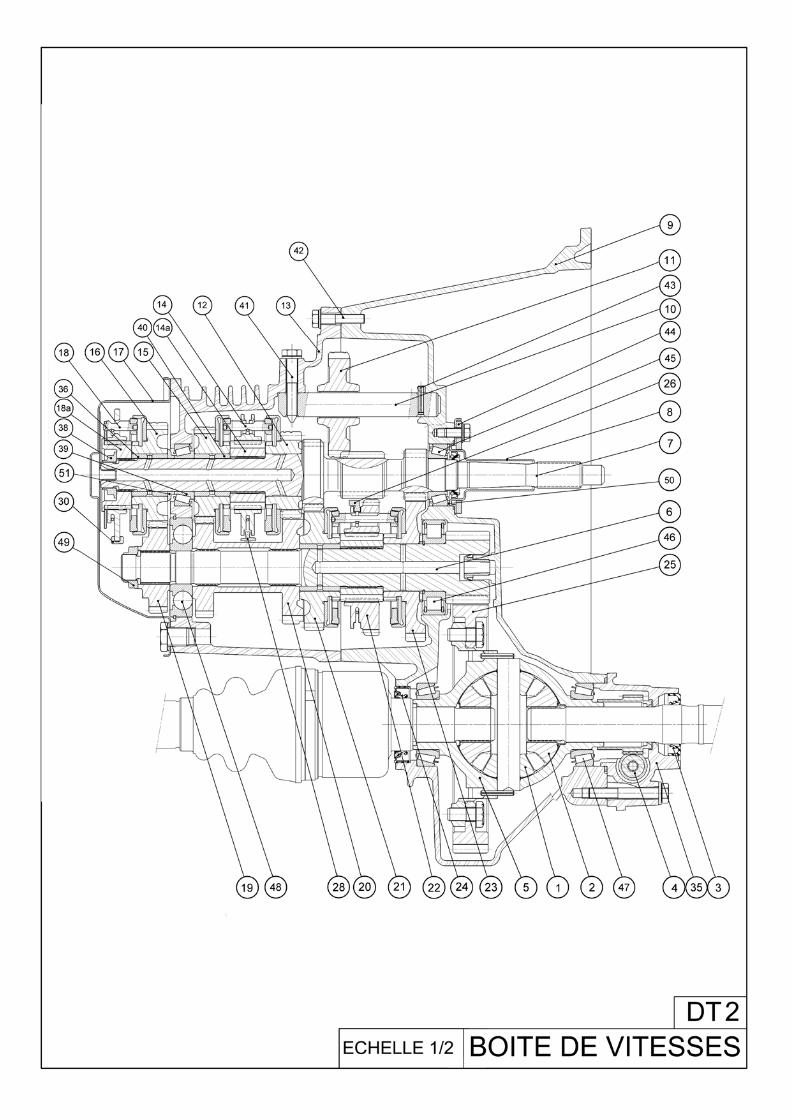
Questions préliminaires – étude du montage de roulements sur l'arbre primaire
Objectifs : Pour le guidage en rotation de l’arbre primaire par rapport aux carters, il s’agit de : - Déterminer la condition nécessaire à l’obtention de la rigidité du guidage. - Identifier un procédé capable de garantir l’alignement des 2 paliers de guidage.
Il s’agit de déterminer les dimensions minimum et maximum de la cale de réglage 50, qui garantissent lesconditions de montage requises pour les roulements réalisant le guidage en rotation de l’arbre primaire. Conditions de montage : les roulements sont montés avec un jeu axial nul, la précontrainte s’installe lors de lamontée en température de la boîte de vitesses.
Question 1 : Analyser le montage de roulements : - Quel type de roulements est utilisé et pourquoi ? - Quel type de montage est utilisé et pourquoi? - Symboliser les arrêts axiaux sur le schéma. - Comment obtient-on les conditions de montage requises ?
Question 2 : Tracer la chaîne de cotes correspondant à la condition Je45-8 (épaisseur de la cale de réglage 50)entre le roulement 45 et la pièce 8. Veiller à nommer les maillons en précisant le numéro de la pièce (exemple :e40).
Question 3 : Calculer les épaisseurs mini et maxi de la cale de réglage 50 pour garantir un montage à jeu axialnul.
Question 4 : Quelle procédure devra-t-on mettre en œuvre pour déterminer l’épaisseur de la cale de réglage ?
Dimensionnement de roulements
Quelques informations concernant les engrenages cylindriques à dentures hélicoïdales
Les engrenages cylindriques à denture hélicoïdale ont un engrènement plus progressif que les engrenages àdenture droite, et de ce fait réduisent notablement les bruits et vibrations engendrés durant l’engrènement. Unedenture hélicoïdale permet un contact progressif des dents (par rapport à une denture droite où la prise - et larupture - du contact s'effectue en même temps sur toute la largeur de la dent) : il y a contact à une extrémité,puis progressivement sur toute la longueur de la dent, puis séparation à l'autre extrémité.→ la transmission est plus régulière à haute vitesse car il y a toujours deux dents en prise (rapport de conduite)La conduite est plus longue grâce au recouvrement et le contact est progressif, d'où une résistance des dentsimportante, et un fonctionnement sans choc.L'usure et le niveau sonore diminuent car le choc dû à la flexion des dents pendant le passage d'un profil à l'autreest très atténué.→ réduction de l'usure, du bruit à grande vitesse et du Zmin.Possibilité d'obtenir de façon précise des entr'axes de dimension souhaitée en modifiant simplement l'angled'hélice.→ variation d'entr'axe sans variation de module ni de déport, mais variation de l'angle d'hélice β.Mouvement possible entre arbres perpendiculairesPour un angle d'hélice généralement inférieur à 25° le positionnement axial de l'arbre ne nécessite pas detolérance serrée (valeur classique : β =20°).
Les dimensions d’une roue à denture hélicoïdale sont déterminées à partir: - du module normalisé, appelé ici module normal (ou réel) et désigné par mn (défini par un calcul de tenue de ladent en flexion et au matage, voir td à suivre) - du nombre de dents Z - de l’angle d’inclinaison de l’hélice β La relation entre pas normal Pn et pas tangentiel Pt permet de définir un module tangentiel (ou apparent) mt.Les dimensions de la roue dépendent alors de ce module tangentiel
Relations: Pn = Pt . cosβ mn = mt . cosβ d0 = mt * Z Pt = π.mt
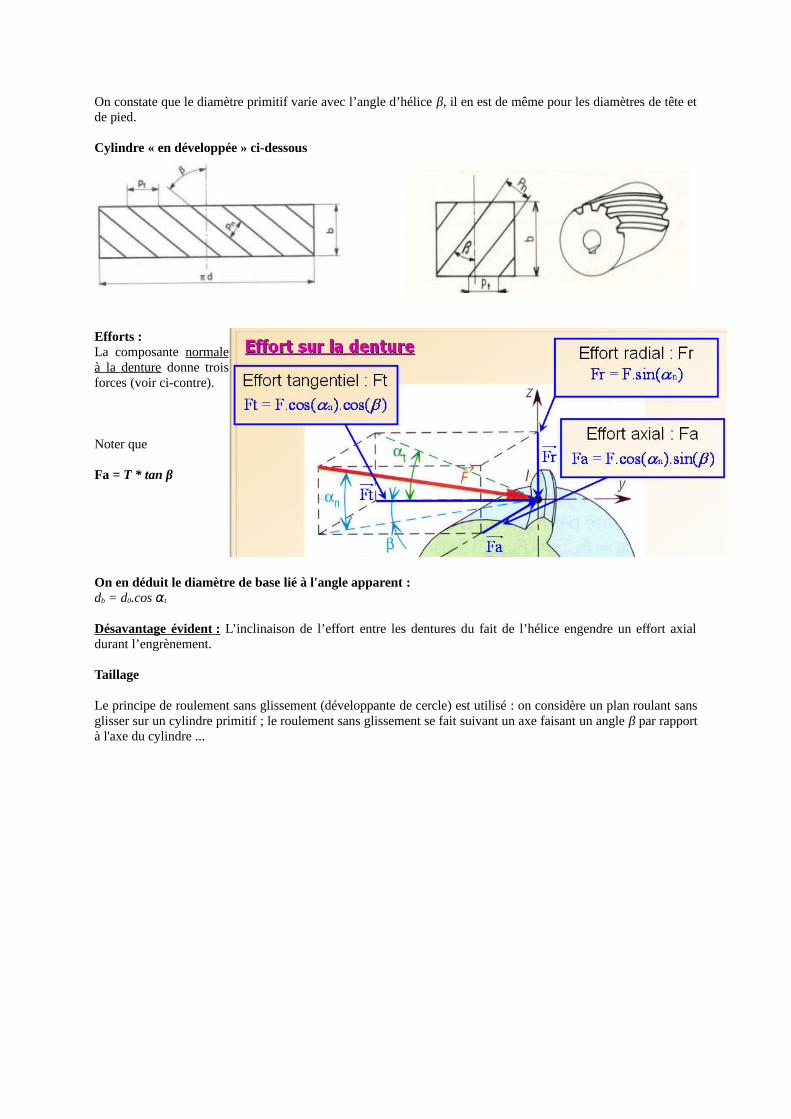
On constate que le diamètre primitif varie avec l’angle d’hélice β, il en est de même pour les diamètres de tête etde pied.
Cylindre « en développée » ci-dessous
Efforts :La composante normaleà la denture donne troisforces (voir ci-contre).
Noter que
Fa = T * tan β
On en déduit le diamètre de base lié à l'angle apparent :db = d0.cos αt
Désavantage évident : L’inclinaison de l’effort entre les dentures du fait de l’hélice engendre un effort axialdurant l’engrènement.
Taillage
Le principe de roulement sans glissement (développante de cercle) est utilisé : on considère un plan roulant sansglisser sur un cylindre primitif ; le roulement sans glissement se fait suivant un axe faisant un angle β par rapportà l'axe du cylindre ...
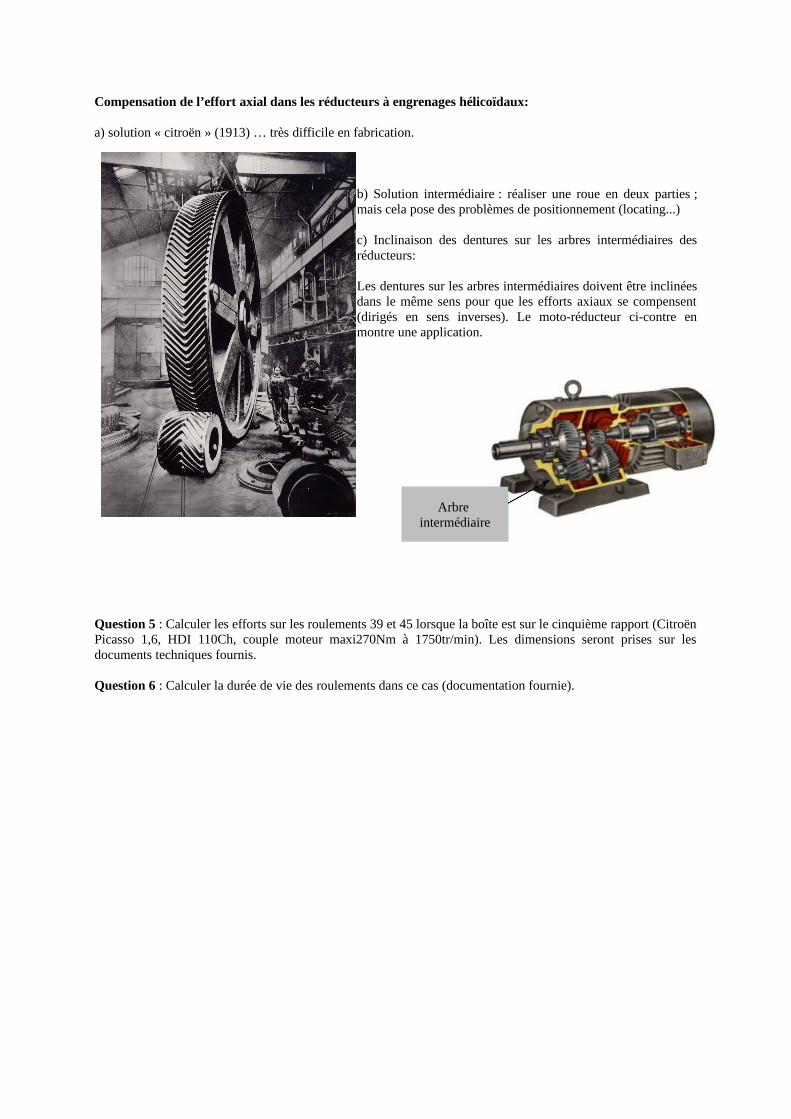
Compensation de l’effort axial dans les réducteurs à engrenages hélicoïdaux:
a) solution « citroën » (1913) … très difficile en fabrication.
b) Solution intermédiaire : réaliser une roue en deux parties ;mais cela pose des problèmes de positionnement (locating...)
c) Inclinaison des dentures sur les arbres intermédiaires desréducteurs:
Les dentures sur les arbres intermédiaires doivent être inclinéesdans le même sens pour que les efforts axiaux se compensent(dirigés en sens inverses). Le moto-réducteur ci-contre enmontre une application.
Question 5 : Calculer les efforts sur les roulements 39 et 45 lorsque la boîte est sur le cinquième rapport (CitroënPicasso 1,6, HDI 110Ch, couple moteur maxi270Nm à 1750tr/min). Les dimensions seront prises sur lesdocuments techniques fournis.
Question 6 : Calculer la durée de vie des roulements dans ce cas (documentation fournie).
Arbre intermédiaire

Pignon moteur 3ème
Synchroniseur 3ème/4ème
Moyeu 3ème/4ème
Entretoise appui 5ème
Pignon moteur 5ème
Entretoise 5ème
Moyeu 5ème
Synchroniseur 5ème
Ecrou arbre primaire
Roulement
Arbre primaire
Pignon moteur 1ère
Pignon moteur 2ème
Entretoise 4ème
Pignon moteur 4ème
Roulement
Roulement
LA LIGNE PRIMAIRE

LES FOURCHETTES ET LES AXES
Goupille
Bille fourchette
Fourchette 5ème
Ressort fourchette
Fourchette 1ére/2ème
Axe fourchette 5ème
Fourchette 3ème/4ème
Axe fourchettes 3ème/4ème, 1ème/2ème, 5ème
Plaquette d‘arrêt

Passage de la vitesse :
Le levier de vitesse permet la sélection et lepassage d’un rapport. Il se traduit, dans laboîte, par le déplacement d’un crabot,déplacement réalisé par l’intermédiaire desfourchettes. Le crabot vient alors solidariser unpignon avec l’arbre primaire ou secondaire enfonction du rapport enclenché. Le maintien desvitesses est réalisé par un indexage sur lesaxes des fourchettes.
Par exemple, étudions le passage de la 4ème
(pignon 15a de gauche), au niveau de l’arbreprimaire (7) :
Le moyeu (14a) du synchroniseur est en liaisonencastrement avec l’arbre primaire (7) et enliaison glissière avec le crabot (14b). Le pignonde 4ème (15a) est en liaison pivot avec l’arbreprimaire (7).
Synchronisation :
La fourchette (28) déplace le crabot (14b),l’axe de verrouillage (14c) et le cône desynchronisation (14d) vers la gauche. La partieconique du cône de synchronisation (14d) vienten contact avec la partie conjuguée de lacloche de synchronisation (15b), liée au pignonde 4ème (15a). Par adhérence, la vitesse dupignon de 4ème (15a) se synchronise avec cellede l’arbre primaire (7).
Crabotage :
La fourchette (28) finit de déplacer l’ensemble(14b), (14c) et (14d) vers la gauche. Le crabot(14b) vient se craboter sur les cannelures dupignon de 4ème (15a). L’arbre primaire (7)entraîne alors le synchroniseur (14) quitransmet l’énergie au pignon (15) parl’intermédiaire des cannelures.
FONCTIONNEMENT DU SYNCHRONISEUR DE VITESSE

Rep nb désignation Rep nb désignation
1 2 Pignon satellite 23 1 Pignon Récepteur de 1ère
2 2 Pignon planétaire 24 1 Joint pont gauche
3 1 Joint pont droit 25 1 Couronne de pont
4 1 Vis de compteur 26 1 Fourchette 1ére/2ème
5 1 Boîtier de différentiel 27 1 Basculeur de MAR
6 1 Arbre secondaire 28 1 Fourchette 3ème /4ème
7 1 Arbre primaire 29 1 Axe fourchette 5ème
8 1 Douille guidage butée débrayage 30 1 Fourchette 5ème
9 1 Carter embrayage 31 1 Axe fourchette, 3ème/4ème, 1ére/2ème,5ème
10 1 Axe renvoi de MAR (marche arrière) 32 1 Commande d‘embrayage
11 1 Pignon intermédiaire de MAR (Baladeur)
33 1 Obturateur axe passage
12 1 Pignon Moteur de 3ème 34 1 Contacteur MAR
13 1 Carter boîte de vitesses 35 1 Carter sortie pont (Prolonge)
14 1 Synchroniseur 3ème /4ème 36 1 Entretoise pignon moteur 5ème
14a 1 Moyeu 38 1 Ecrou serrage
14b 1 Crabot 39 1 Roulement à rouleaux coniques
14c 1 Axe de verrouillage 40 1 Entretoise pignon moteur 4ème
14d 1 Cône de synchronisation 41 1 Vis maintien arbre de marche arrière
15 1 Pignon Moteur 4ème 42 8 Vis assemblage carter
15a 1 Pignon 43 1 Arbre marche arrière
15b 1 Cloche de synchronisation 44 1 Couvercle
16 1 Pignon Moteur 5ème 45 1 Roulement à rouleaux coniques
17 1 Carter arrière 46 1 Roulement à rouleaux cylindriques
18 1 Synchroniseur 5ème 47 1 Roulement à rouleaux coniques
18a 1 Moyeu 5ème 48 1 Roulement à billes
19 1 Pignon Récepteur de 5ème 49 1 Ecrou
20 1 Pignon Récepteur de 3ème et 4ème 50 1 Cale de réglage
21 1 Pignon Récepteur de 2ème 51 1 Rondelle appui pignon
22 1 Synchroniseur de 1ére/2ème
Non visibles sur le document graphique DT2
NOMENCLATURE SIMPLIFIEE
FT
11 T
rans
met
tre e
t ada
pter
la p
uiss
ance
ent
re l'
arbr
epr
imai
re e
t la
cour
onne
du d
iffér
entie
l
FT11
1 : T
rans
met
tre e
t ada
pter
la p
uiss
ance
ent
re l'
arbr
epr
imai
re e
t l'a
rbre
sec
onda
ire
FT11
2 : S
élec
tionn
er le
rapp
ort
FT11
3 : T
rans
met
tre e
t ada
pter
la p
uiss
ance
de
l'arb
re d
eso
rtie
à la
cou
ronn
e du
diffé
rent
iel
FT11
11 :
Lier
les
pign
ons
de1è
re e
t 2èm
e su
r l'a
rbre
prim
aire
FT11
13 :
Gui
der l
'arb
re p
rimai
reen
rota
tion
FT11
12 :
Lier
tem
pora
irem
ent l
espi
gnon
s de
3èm
e et
4èm
esu
r l'a
rbre
prim
aire
FT11
14 :
Lier
tem
pora
irem
ent l
espi
gnon
s de
1èr
e et
2èm
esu
r l'a
rbre
sec
onda
ire
FT11
15 :
Lier
les
pign
ons
de3è
me
et 4
ème
sur
l'arb
re s
econ
daire
FT11
16 :
Gui
der l
'arb
rese
cond
aire
en
rota
tion
FT11
131
: Pos
ition
ner e
t mai
nten
irra
dial
emen
t l'a
rbre
prim
aire
par r
appo
rt au
car
ter
FT11
132
: Pos
ition
ner e
t mai
nten
irax
iale
men
t l'a
rbre
prim
aire
par r
appo
rt au
car
ter
FT11
133
: Ins
talle
r une
préc
ontra
inte
dan
s le
gui
dage
en ro
tatio
n de
l'ar
bre
prim
aire
FT11
161
: Pos
ition
ner e
t mai
nten
irra
dial
emen
t l'a
rbre
sec
onda
irepa
r rap
port
au c
arte
r
FT11
162
: Pos
ition
ner e
t mai
nten
irax
iale
men
t l'a
rbre
sec
onda
irepa
r rap
port
au c
arte
r
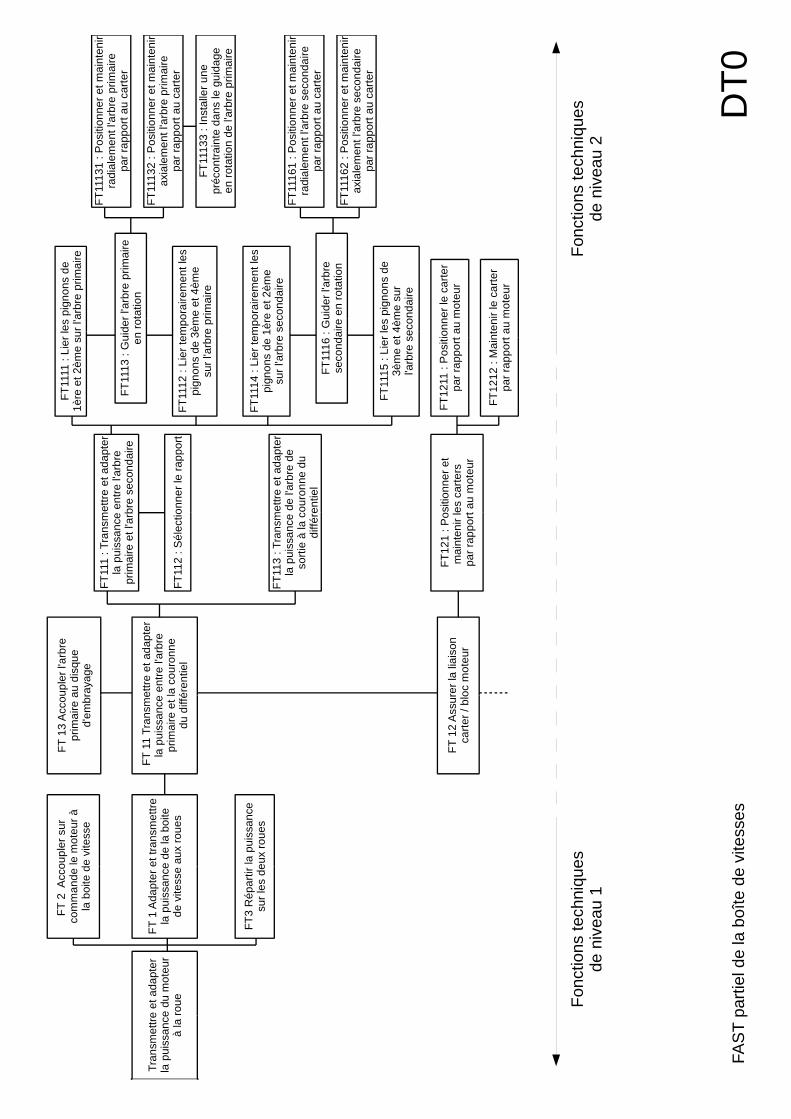
DT0
FAS
T pa
rtiel
de
la b
oîte
de
vite
sses
FT 1
2 A
ssur
er la
liai
son
carte
r / b
loc
mot
eur
FT 1
3 A
ccou
pler
l'ar
bre
prim
aire
au
disq
ued'
embr
ayag
e
FT12
1 : P
ositi
onne
r et
mai
nten
ir le
s ca
rters
pa
r rap
port
au m
oteu
r
FT12
11 :
Pos
ition
ner l
e ca
rter
par r
appo
rt au
mot
eur
FT12
12 :
Mai
nten
ir le
car
ter
par r
appo
rt au
mot
eur
Tran
smet
tre e
t ada
pter
la p
uiss
ance
du
mot
eur
à la
roue
FT 2
Acc
oupl
er s
ur
com
man
de le
mot
eur à
la b
oite
de
vite
sse
FT 1
Ada
pter
et t
rans
met
trela
pui
ssan
ce d
e la
boi
tede
vite
sse
aux
roue
s
FT3
Rép
artir
la p
uiss
ance
sur l
es d
eux
roue
s
Fonc
tions
tech
niqu
esde
niv
eau
1Fo
nctio
ns te
chni
ques
de n
ivea
u 2

z
y
Entré
e de
la b
oîte
de
vite
sses
(d
isqu
e d’
embr
ayag
e)
Arbr
e pr
imai
re Ar
bre
seco
ndai
re
Diff
éren
tiel
Sorti
e de
la b
oîte
de
vite
sses
(cot
é ro
ues)
Cra
bot 3
ème /4
ème
Car
ter
DT1
Cra
bot 1
ère /2
ème
Cra
bot 5
ème
Pign
on m
oteu
r 5èm
e Pi
gnon
mot
eur 4
ème
Pign
on m
oteu
r 3èm
e


DT4
x



51
Roulement à contact oblique Le calcul de Péq est ici plus complexe parce que ces roulements sont montés par paire. Nous appellerons ici Ka et Kr les charges extérieures appliquées au montage. Les charges radiales Fri appliquées aux centres de poussée des roulements induisent dans ceux-ci des charges axiales Fai. Ces charges axiales induites vont surcharger un roulement et décharger l’autre. Les constructeurs indiquent dans leurs catalogues une méthode de calcul uniquement valable pour des montages sans jeu et sans précharge. Cette méthode est développée par les organigrammes suivants. D’un point de vue d’équilibre quasi-statique, en ramenant l’ensemble dans le plan, nous disposons de 3 équations pour 4 inconnues. Cela revient à dire que nous sommes en présence d’un système hyperstatique d’ordre 1. Pour le résoudre, nous aurions besoin d’une équation de déformation. Nous obtenons donc le système suivant :
BABA aFaFrFrFaKrKrrrrrr
+++=+ Equation de la résultante :
Ka = FaA + FaB Kr = FrA + FrB Equation de moment/0
FrA.0A = FrB.B0
Disposition O
0 Kr
0 Kr
Montage indirect ou montage en O C’est la solution à adopter lorsque la rigidité de l’ensemble de la liaison est recherchée ; on est dans le cas du plus grand écart effectif entre roulements. Le réglage est réalisé sur les bagues intérieures. La dilatation de l’arbre a tendance à diminuer les charges sur les roulements et à augmenter le jeu interne de la liaison, et inversement s’il y a dilatation du logement. Disposition X
0 Kr
0 Kr
Montage en X ou montage direct Ce montage amène les solutions les plus simples et les plus économiques : moins de pièces adjacentes et moins d’usinages. Le réglage du jeu interne de la liaison est effectué sur les bagues extérieures. Les dilatations de l’arbre ont tendance à charger un peu plus les roulements et à diminuer le jeu interne. Roulement à billes Roulement à rouleaux coniques
Nous appellerons A le roulement qui supporte la charge axiale appliquée au montage (Charges induites exclues). Les organigrammes suivants synthétisent les différentes combinaisons de calcul. Roulement à billes à contact oblique Roulement à rouleaux coniques
Ka < (eA.FrA) - (eB.FrB)
eA.FrA ≤ eB.FrB oui non
FaB = eB.FrB FaA = FaB + Ka
FaA = eA.FrA FaB = FaA - Ka
ouinon
Pi éq = X.Fri + Y.Fai
Fai/Fri ≤ ei
Pi éq = Fri
oui non
⎟⎟⎠
⎞⎜⎜⎝
⎛−<
B
B
A
A
YFr
YFr
5,0Ka
FrA/ YA ≤ FrB/ YBoui non
B
BB Y
Fr.5,0Fa =
FaA = FaB + KaA
AA Y
Fr.5,0Fa =
FaB = FaA - Ka
ouinon
Pi éq = X.Fri + Y.Fai
Fai/Fri ≤ ei
Pi éq = Fri
oui non