comunication
DESCRIPTION
Know how is or not a sble communication webTRANSCRIPT

28'1I ,.;
Estimation of a Wideband Fading
HF Channel using
Modified Adaptive Filters /
A Thesis Presented to
The Faculty of the College of Engineering and Technology
Ohio University
In Partial Fulfillment
of the Requirements for the Degree
Master of Science
by
Christopher Alan ~~a1ho
June, 1993

for Lynne and Sarah

Acknowledgements
I wish to thank Dr. Jeff Dill for his guidance and patience through out my
graduate study. Without his support, this thesis would not have been possible.
I would also like to thank my thesis committee and the rest of the Faculty of
the Department of Electrical and Computer Engineering for their help along the way.
A special thanks to Dr. Joseph Smallcomb who had to know the truth.
1

ii
Table of Contents
Acknowledgements
Table of Contents . . . . . . . . . . . . . . . . . . . . . . . . . . ii
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. IV
List of Tables V
Chapter 1: Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 11.1. Purpose. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 11.2. Outline of Thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 11.3. High Frequency Channel 21.4. Time Averaging. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 51.5. Rake Correlator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 61.6. Channel Tap Model 6
Chapter 2: Introduction to Adaptive Filters 82.1. Linear Prediction and Wiener Filter Theory . . . . . . . . . . . . . . .. 82.2. Linear Prediction and AR Processes 122.3. The Method of Steepest Descent . . . . . . . . . . . . . . . . . . . . . .. 132.4. Levinson-Durbin Algorithm and the Lattice Structure . . . . . . . . .. 20
Chapter 3: Adaptive Algorithms . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 273.1. Introduction 273.2. Computational Complexity 303.3. Finite Precision Effects 303.4. Performance Considerations 32
Chapter 4: Algorithms. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 344.1. Normalized Least-Mean Square 344.2. Gradient Adaptive Lattice. . . . . . . . . . . . . . . . . . . . . . . . . .. 374.3. Prediction-to-Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . .. 39
Chapter 5: Computer Simulations/Results/Conclusions .... . . . . . . . . . .. 445.1. Computer System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 445.2. Chi Conversion Factor. . . . . . . . . . . . . . . . . . . . . . . . . . . .. 445.3. Computer Simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 46
5.3.1. General Channel Conditions . . . . . . . . . . . . . . . . . . .. 475.3.2. Tracking Ability. . . . . . . . . . . . . . . . . . . . . . . . . .. 525.3.3: Modification vs. Extended Order. . . . . . . . . . . . . . . .. 545.3.4: Comparison of Lattice Orders 56
5.4 Conclusions and Recommendations 57

111
References . . . . . . . . . . . .. 59
Appendix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 61A: BOSS Block Diagrams. . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 61

iv
List of Figures
Figure 2.1: Transversal Filter. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 14Figure 2.2: Lattice Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 26Figure 5.1: Key 5.3.1 / 5.3.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 48Figure 5.2: Doppler Shift 1Hz / SNR 0.5 . . . . . . . . . . . . . . . . . . . . . . .. 48Figure 5.3: Doppler Shift 1Hz / SNR 1.0 . . . . . . . . . . . . . . . . . . . . . . .. 48Figure 5.4: Doppler Shift 1Hz / SNR 2.0 . . . . . . . . . . . . . . . . . . . . . . .. 49Figure 5.5: Doppler Spread 1Hz / SNR 0.5 .. . . . . . . . . . . . . . . . . . . .. 49Figure 5.6: Doppler Spread 1Hz / SNR 1.0 . . . . . . . . . . . . . . . . . . . . .. 49Figure 5.7: Doppler Spread 1Hz / SNR 2.0 . . . . . . . . . . . . . . . . . . . . .. 50Figure 5.8: Doppler Shift 10Hz / SNR 0.5 . . . . . . . . . . . . . . . . . . . . . .. 50Figure 5.9: Doppler Shift 10Hz / SNR 1.0 . . . . . . . . . . . . . . . . . . . . . .. 50Figure 5.10: Doppler Shift 10Hz / SNR 2.0 . . . . . . . . . . . . . . . . . . . . .. 51Figure 5.11: Doppler Spread 10Hz / SNR 0.5 . . . . . . . . . . . . . . . . . . . .. 51Figure 5.12: Doppler Spread 10Hz / SNR 1.0 . . . . . . . . . . . . . . . . . . . .. 51Figure 5.13: Doppler Spread 10Hz / SNR 2.0 ~ . .. 52Figure 5.14: Chirped Tone and Estimate . . . . . . . . . . . . . . . . . . . . . . .. 53Figure 5.15: Slow Chirp 53Figure 5.16: Fast Chirp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 53Figure 5.17: Key 5.3.3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 54Figure 5.18: Doppler Shift 1Hz I SNR 1.0 . . . . . . . . . . . . . . . . . . . . . .. 54Figure 5.19: Doppler Spread 1Hz I SNR 1.0 _.................... 55Figure 5.20: Doppler Shift 10Hz I SNR 1.0 . . . . . . . . . . . . . . . . . . . . .. 55Figure 5.21: Doppler Spread 10Hz / SNR 1.0 . . . . . . . . . . . . . . . . . . . .. 55Figure 5.22: Doppler Shift 10Hz I SNR 1.0 . . . . . . . . . . . . . . . . . . . . .. 56Figure 5.23: Doppler Spread 10Hz I SNR 1.0 . . . . . . . . . . . . . . . . . . . .. 56

v
List of Tables
Table 3.1 Adaptive Algorithms 28Table 3.2 Computational Complexity 31Table 4.1 Prediction to Estimation Cost . . . . . . . . . . . . . . . . . . . . . . .. 43Table 5.1 Simulation Parameters 47

1
Chapter 1: Introduction
1.1. Purpose
The purpose of this thesis is to explore adaptive filtering techniques to replace
the time averaging (TA) operation of the communication system described in
(Smallcomb, 1992). The communication system is a High Frequency (HF) spread
spectrum system that transmits a reference signal in conjunction with a pulse-position
modulated data symbol. The purpose of the reference signal is to provide a current
estimate of the impulse response of the channel. This knowledge of the channel
impulse response is then used to remove channel distortion from the data signal prior
to a symbol decision.
At the channel estimator, it will be shown that the adaptive filtering problem is
one of tracking a non-stationary signal of interest buried in white noise. Problems of
this type are ideal for adaptive filters and many similar examples may be found in the
literature.
1.2. Outline of Thesis
This thesis is outlined as follows. The remainder of Chapter 1 is devoted to
background material on HF channels and the TA operation. Topics discussed include
fading and frequency diversity. A brief description of the Rake filter is also included.
Chapter 2 formulates the adaptive filtering problem in a linear prediction
configuration. The Normal or Wiener-Hopf Equations are derived and theoretical

2
performance bounds established. Two optimum filter algorithms are also derived.
These algorithms provide the basis for the eventual adaptive filter implemented.
Chapter 3 introduces some of the common adaptive filtering algorithms that have been
considered for this application. A discussion of practical algorithm characteristics is
also presented. Based on the material in Chapter 3, it is possible to narrow the field
of possible algorithms. Chapter 4 contains derivations of the algorithms considered for
this application. Also included in Chapter 4 is the modification to the adaptive filters
which allows the current observation to be included in the estimation of the channel
impulse response. Chapter 5 includes simulation results and final recommendations.
Appendix A contains the BOSS modules and all computer programs used in the
simulations.
1.3. High Frequency Channel
High Frequency (HF) communication takes place in the 3-30 MHz frequency
band. One attractive feature of the HF channel is the ability to communicate over long
distances. HF waves propagate along two different channels. The first is the ground
wave channel. These signals tend to attenuate rapidly due to rough terrain and/or the
curvature of the earth. The useful communication range of the ground wave is limited
to about 50 miles. The HF skywave propagates toward space and is refracted back to
earth by ionized layers in the ionosphere. It is the skywave that makes long distance
communication possible.
The ionosphere is comprised of a number of horizontal ionized layers. The

3
layers are labeled D, E and F for historic reasons. Under certain conditions, the F
layer may divide into two sublayers, Fl and F2. The D layer acts mainly as an
absorber of HF energy while the refraction takes place in the E and F layers.
The main source of ionization is solar electromagnetic radiation that covers the
ultra-violet and X-ray bands of the spectrum. The ionization rate depends on altitude,
intensity of the solar radiation, the ionization efficiency of the atmospheric gases and
the solar zenith angle. The maximum ionization rate occurs when the sun is directly
overhead. The creation of ions is balanced by ionization losses due to recombination
of electrons with positively charged ions or neutral atoms or molecules. The HF
channel is non-stationary due to the changing ionization rate and the shifting altitudes
of the layers.
The time varying nature of the HF channel results in fluctuations in received
signal strength. This is known as fading. One major cause of fading is the
simultaneous arrival of two or more signals, propagating over different skywave
paths, with time variant phases that add constructively or destructively. A common
fading rate is 10-15 fades per minute with a depth of less than 10 dB.
The communication system in this application employs spread-spectrum as a
frequency diversity technique to reduce the effects of fading. With frequency
diversity, the transmitted signal is spread over a wide band which reduces the
probability of different signal components fading at the same time.
The refraction of a signal by the ionosphere causes that signal to be spread
over time. The duration of the spread is known as the multipath spread T . AverageIn

4
values range from 1-2 milliseconds, but may reach 5-10 milliseconds for disturbed
conditions. The coherence bandwidth of the channel is defined by (Proakis, 1989) as
1w::::C T
m
(1.1)
This is the minimum separation in frequency at which two signal components are
affected differently by the channel. To achieve frequency diversity, the channel should
be frequency selective. This requires that the signal bandwidth W, be much greaters
than W ·c
A frequency selective channel may be modeled as a tapped delay line where
the unit of delay is 1/ Ws
. The number of taps L, is given by
(1.2)
Each channel tap may be independently modeled as a zero-mean complex-valued
Gaussian random process. The envelope of each tap Ih(n,t) I, has a Rayleigh
distribution. This is commonly know as a Rayleigh fading channel.
It is assumed that the scattering of the multipath is uncorrelated, therefore the
channel taps may also be considered mutually independent random processes (Proakis
1989). Based on this assumption, a bank of adaptive filters will be implemented, one
for each channel tap. The final number of adaptive filters implemented will depend on
the tail-clipping operation described in (Smallcomb, 1992).

5
1.4. Time Averaging
The current method of noise reduction on the channel taps is time averaging
(TA). This is a simple recursive algorithm using a first order IIR filter that sums
weighted combination of the present and past observations attempting to reduce the
additive white noise.
The TA estimate is given by
h(n) = «y(n) + (l-«)h(n-l) (1.3)
where h(n) is the current estimate, y(n) is the current observation and « is a positive
real scalar between 0 and 1. The performance of the TA derived in (Smallcomb,
1992) is described by the noise reduction factor X
(1.4)2-«
(X
X ---
X may also be defined as the ratio of the estimation noise power over the input noise
power. This performance measure assumes rather strict channel conditions: 1) there is
no fading, and 2) the channel tap is time invariant.
There are two shortcomings of the TA module that have spurred the search for
adaptive filters. First, u is not an adaptive parameter. This means that the TA
module has no tracking ability, ie in non-stationary conditions, performance is
degraded. To avoid unstable behavior, «, must be set for the worst case. This limits
its performance for other channel conditions.
The second problem with the TA module is that « is a real scalar. This limits

6
its ability to track complex phase information.
1.5. Rake Correlator
The purpose of the Rake correlator is to recombine the signal components that
were intentionally spread over the multipath channel by the transmitter. The Rake
correlator is a tapped delay line that aligns the phase of each multipath component and
coherently combines them. For optimum Rake performance, its tap weights must be
the same as the channel tap weights (Proakis, 1989).
1.6. Channel Tap Model
To account for the wide variety of channel conditions we will use two channel
tap models. The first model is a complex tone. The second model is a complex
Gaussian auto-regressive (AR) process.
The rising and falling of the ionospheric layers creates a Doppler shift in the
transmitted signal. This shift range from 0.1-1.5 Hz for normal or quiet conditions
and 0.1-10 Hz during disturbed conditions (Maslin 1987). The first model is simply a
complex tone with frequency equal to that of the Doppler shift. The non-stationary
property of the channel will be modeled by a chirped, or frequency swept, complex
tone.
The second model simulates the Doppler spread of the channel during
disturbed conditions. Channel disturbances may occur as the result of sun spots or
other solar activity. The second model, discussed in (Hariharan and Clark, 1990), is

two independent sources of white Gaussian noise passed through identical fifth order
Bessel filters. The filter output is then combined to form the real and imaginary
channel tap. This is the Rayleigh fading channel discussed earlier. The bandwidth of
the Bessel filters corresponds the Doppler spread of the channel. The Doppler spread
effect may range from 0.1 Hz for a mild disturbance to 15 Hz. in an extremely
disturbed channel.
7

8
Chapter 2: Introduction to Adaptive Filters
2.1. Linear Prediction and Wiener Filter Theory
Having demonstrated that the multipath channel may be treated as a collection
of independent taps, it will now shown how adaptive filter techniques may be applied
to estimate each channel tap. In the following discussion, only one tap is considered.
The discrete time period is referred to as the super-symbol period, (Smallcomb 1992).
Consider the received signal from one of the channel multipaths:
yen) = hen) + v(n) (2.1)
where hen) is the multipath impulse response and v(n) is zero mean white Gaussian
noise. The linear prediction problem is to predict the current value of hen) based on a
linear combination of the previous M samples of y(n): y(n-l), y(n-2), ... , y(n-M).
M
yen) = E wty(n-i);=1
Wiener filter theory may be used ttl optimize the prediction. Let e(n) be the
prediction error:
e(n) = yen) - j(n)
The error may also be written in vector form,
(2.2)
(2.3)

e(n) = yen) - wHy(n-l)
where
and
yen-I) = [Y(n-l),y(n-2), ...,y(n-M)]T
Superscript H denotes Hermitian or conjugate transpose.
Let the filter optimization criteria be the minimum mean square error J(w).
.l(w) = E[e(n)e(n)*]
Substituting (2.4) into (2.7) and expanding yields:
J(w) = E{y(n)y(n)*} - E{wHy(n-l)y(n)*}
- E{Y(n)y(n-l)Hw} + E{wHy(n-l)y(n)Hw}
9
(2.4)
(2.5)
(2.6)
(2.7)
(2.8)
(2.9)
Assuming that the filter weights, w, are constant, they may be moved outside the
expectation operator,
J(w) = E{y(n)y(n)*} - w"E{Y(n-l)y(n)*}
- E{Y(n)y(n-l)H)w + wH E{y(n-l)y(n-l)~w
J(w) may now be analyzed on a term by term basis. Assuming yen) to be zero
mean, the first expectation is simply the variance of y(n).

E{y(n)y(nr} = a~
The second term is denoted as the cross-correlation vector p,
E{y(n-l)y(n)*} =p
in expanded form,
[r( -l),r( -2), ,r(_M)]T
P = [r(1)*,r(2)., ,r(m)*f
10
(2.10)
(2.11)
(2.12)
where r(i) is the autocorrelation 'function for lag i. The third expectation term is
simply the Hermitian transpose of the second term.
pH = E{y(n)y(n-l)H}
The fourth term is the (M x M) autocorrelation matrix denoted by R
R = E{Y(n-l)y(n-l)H}
Of,
(2.13)
-(2.14)
R =
r(O)
,*(1)
r*(M-l)
r(1)
r(0)
r(M-l)
r(O)
(2.15)
Note that if y(n) is a wide-sense stationary process, p and R are constants.
Making the substitutions (2.10), (2.11), (2.13) and (2.14) into (2.9), we have

11
(2.16)
From (2.16) it can be seen that J(w) is a second order function of the filter weight
vector w. The dependence of J(w) on w may be viewed as a bowl shaped surface
with a unique minimum (Haykin, 1991), (Alexander, 1986). At the bottom or
minimum of the "error-performance surface" the weight vector, w, attains the
optimum value wII
To determine the optimum weight vector w,,' the mean-square error J(w) is
differentiated with respect to w and the result set equal to zero.
dJ(w) = V(J) = 0d(w)
(2.17)
where del is the gradient vector. Differentiating (2.16) term by term and combining
the results yields the normal or Wiener-Hopf equations.
Rw" = P
solving (2.18) for w :II
(2.18)
(2.19)
It can be shown (Haykin, 1991), (Alexander, 1986) that when the weight
vector w, is at the optimum value w,,' the estimation error, e(n) , is orthogonal to the
input vector y(n-l).

E{y(k) e(k) *} = 0
12
(2.20)
To find the minimum mean-square error, (2.19) is substituted into (2.14):
J 2 H H H Rmin = 0y - pit'. - W. P + W. W •
using (2.19), (2.21) reduces to:
2 HJmin = 0y -p W.
(2.21)
(2.22)
Wiener filter theory provides a solution for the optimal filter coefficients, but
note that for large values of M, matrix inversion may be impractical. In the remaining
sections of the chapter, we will introduce two recursive algorithms for solving the
Weiner-Hopf equations. The recursive algorithms, while requiring explicit knowledge
of the signal statistics, are the basis for the practical adaptive algorithms.
2.2. Linear Prediction and AR Processes
Having derived the optimal prediction error filter and shown that the signal of
interest is an AR process, it is helpful to examine the relationship between the two.
Linear Prediction and autoregressive modeling are complementary operations.
The prediction error filter is an all-zero finite-impulse response filter. The AR model
is an all-pole infinite impulse response filter. When the prediction error filter is
optimized, the zeros of its transfer function are located at exactly the same position of
the poles in the transfer function of the AR model. The relationship between the two
sets of parameters from (Haykin, 1991) is given by:

aM•i = -Wo•i i = 1,2, ...,M
a~ = E{le(n)12}
The ability to predict a signal is based on correlation between adjacent
13
(2.23)
samples. This implies that by increasing the filter order, correlation between adjacent
samples of the error signal is reduced. Theoretically, if the filter order is high
enough, adjacent samples of the error signal are uncorrelated. This is known as the
whitening property of prediction error filters.
2.3. The Method of Steepest Descent
The method of steepest descent is one of a family of iterative optimization
methods that provides a method of searching a multidimensional performance surface.
The particular surface of interest is the mean-square error (MSE) surface. A thorough
discussion of the properties of the MSE surface may be found in (Alexander 1986).
The method of steepest descent is based on a transversal filter structure, (Fig. 2.1).
Recall the prediction error given by (2.4),
e(n) = yen) - wHy(n-l) (2.24)
If we no longer assume that the weight vector is constant, then the mean-
square error become a function of the time index n.
J(n) = a~ - wH(n)p - pw(n) + wHRw(n) (2.25)

14
/\yen)
-1 z' z'Z............... t------r---~ ---------
yen)
Figure 2.1: Transversal Filter
The method of steepest descent proceeds as follows:
1. Start with an initial guess of the optimum weight vector w . UsuallyII
this is the null vector O.
2. Based on the value of the weight vector, compute the gradient
vector.
3. Add a correction term to the current value of the weight vector
based on the opposite direction of the weight vector.
4. Return to step two and repeat the procedure.
The method of steepest descent "steps" down the MSE surface until it reaches the

15
bottom or minimum point.
The recursive equation for the method of steepest descent is:
1wen +1) = wen) + - J.L [ - V(J(n»]
2(2.26)
Where V(J(n)) , is the gradient of the MSE surface, J.L is a positive, real-valued scalar
known as the step size, and the 1/2 factor is simply for convenience. The gradient is
given by,
V(J(n» = -2p + 2Rw(n)
Substituting (2.27) into (2.26) yields:
w(n+ 1) = wen) + 1l[P - Rw(n)]
(2.27)
(2.28)
Two important issues to consider in the analysis of an adaptive algorithm are
its stability and transient behavior. (In this case stability refers to convergence of the
algorithm to the desired solution.) For the method of steepest descent, both stability
and the transient behavior are dependent on the step size I!' and the autocorrelation
matrix R.
In examination of the stability of the method of steepest descent, it is common
to define a weight error vector,
c(n) = wen) - w"
where w is the Wiener weight vector, from equation (2.19). Using (2.28) and"
(2.29),
(2.29)

c(n+1) = (1 - ~R)c(n)
Equation (2.30) represents a series of coupled difference equations. Analysis is
simplified by decoupling the equations using a similarity transform of the
16
(2.30)
autocorrelation matrix R. Using linear algebra techniques, R may be written as
R = QAQ" (2.31)
where Q is a unitary matrix whose columns are the eigenvectors associated with the
eigenvalues of R. A is a diagonal matrix whose elements are the eigenvalues of R.
Al 0 ... 0
o A2
0 ... 0. A =
oo 0 ... AM
Substituting (2.31) into (2.30),
c(n+l) = (I - JJQAQ")c(n)
(2.32)
(2.33)
premultiplying by Q" and using the property of unitary matrices, Q" = o". (2.33)
reduces to
Q"c(n+l) = (I -J-LA)Q"c(n)
We may now define a vector of uncoupled weight difference equations,
(2.34)

v(n) =~c(n)= ~[w(n) - wJ
assuming that w(O) = 0, then
v(O) = _QHW tJ
(2.34) may be rewritten as
v(n+ 1) = (I - JJ,A)v(n)
The kth uncoupled difference weight or natural mode is given by
17
(2.35)
(2.36)
(2.37)
(2.38)
(2.38) is a first order difference equation which may be expressed in terms of vi(O)
by
(2.39)
One of the properties of R is that it is positive definite. This means that all its
eigenvalues are real and positive. Therefore (2.38) represents a geometric series. Of
particular interest is the behavior of the kth natural mode as n approaches infinity.
Convergence of the natural modes to 0 implies
limw(n) = wtJ
For vlen) to decay to 0,
(2.40)
(2.41)

18
to insure stability, (2.41) must hold for all k. Solving (2.41) for J.L' and considering
all At determines the step size boundary conditions
2O<J.L<--
Amax
where A ,is the largest eigenvalue of R.max
(2.42)
Another method of examining the behavior of the method of steepest descent is
by use of a time constant -rk ' The unit of time is defined to be one iteration cycle. Let
solving (2.43) for tk
yields
t 1 = ----
(2.43)
(2.44)
-rk is the time (number of iterations) required for the kth natural mode, vk' to decay
to lIe of its original value. (2.44) shows the dependence of the time constant on J.L
and tk
• Using the above results, one is now in a position to analyze the original
weight vector.
Premultiplying (2.34) by Q and rearranging the terms yields
M
w(n) = -, + E qjv;(n);=1
(2.45)

19
where qk' are the columns of Q. The transient behavior of the kth tap is
M
wk(n) = Wok + E qkiv;(l-J.LAi)ni=1
Examination of (2.46) reveals that each tap converges as a weighted sum of
(2.46)
exponentials. At this point, one may introduce an overall time constant ,; , which isa
defined as the time required for the left side of (2.46) to decay to lIe of its initial
value. Analysis is simplified by considering only the upper and lower bounds. From
(Haykin 1992), the time constant bounds are
-IIn(1 - ~ Amax>
Equation (2.47) demonstrates the dependence of the weight convergence on the
(2.47)
eigenvalue spread of the autocorrelation matrix R. When R is ill-conditioned the
convergence time is limited by the smallest eigenvalues.
The final property of the method of steepest descent we will deal with is the
transient behavior of the mean-squared error, J(n). The MSE at any time n is given
by (Haykin 1992) as
M
J(n) =Jmin + E Ai Iv;(n) 12
i=1
Substituting (2.38) into (2.48) yields
(2.48)

M
J(n) =Jmin + LAi(l - I!Ai)2nlvi(O)12i=l
When J1 is given by (2.42),
limJ(n) = Jminn"OO
20
(2.49)
(2.50)
The learning curve of the algorithm is a sum of decaying exponentials. The time
constant for the kth natural mode is
-1
(2.51) shows the dependance of the convergence rate on the step-size J.L.
(2.51)
The method of steepest descent requires explicit knowledge of the second
order signal statistics. This makes it of little practical value. The method of steepest
descent, however, forms the basis for the Stochastic Gradient algorithms (most
notably the LMS). These algorithms may be analyzed using the above techniques.
# 2.4. Levinson-Durbin Algorithm and the Lattice Structure
In this section, the Levinson-Durbin algorithm is derived. The Levinson-
Durbin algorithm is an order recursive solution of the Wiener-Hopf equations. The
method behind the algorithm is to derive the rnth order predictor given that the
predictor of order (m-l) is known. Once the general formula has been derived, given
simple initial conditions, any order predictor may be found. The Levinson-Durbin
algorithm also forms the basis for the lattice filter structure, (Figure 2.2), which will

21
introduced in this section.
The general solution for the mth order predictor, in terms of the (m-l)st order
predictor is given by
(2.52)
where k"" is a constant known as the reflection coefficient, and d"'_1 is an unknown
vector. The mth order autocorrelation matrix may be written as
.[R -.jR = .-1 P.-l
• -rP".-l r(O)
(2.53)
where the overbar denotes reverse ordering. Using (2.52) and (2.53), the mth order
Wiener-Hopf equations become
[~.-1 ;:-1] * [ [W__t ] + [d__1] 1= ~.-llP~-1 r(o) 0 1". lr(m)
We now wish to solve (2.54) for k ,and d . The first equation is", .-1
R w + R d + p-. k = P.-1 .-1 .-1 .-1 .-1 lit .-1
however,
and the solution for d"'_1 is given by
(2.54)
(2.55)
(2.56)

d = k p-l -.".-1 - m ....... -lP".-1
From (Alexander, 1986)
and (2.57) reduces to
The scalar equation from (2.54) is
-r -TP".-1 W.-1 + P.-ld._t + r(O)k", = r(m)
Substituting (2.59) into (2.60) and solving for k results in",
22
(2.57)
(2.58)
(2.59)
(2.60)
(2.61)
For a zero-mean random process, 7(0) =0 2 , therefore the denominator of (2.61) is
the mean-squared error for the (m-1)st order predictor, J . (2.61) may be expressed",-1
as
(2.62)
The recursive equation for the mean-squared error J , from (Haykin 1992), is",

23
For a zeroth order predictor, Jo = r(O).
(2.63)
Before deriving the lattice structure, it is useful to introduce the concept of
backward linear prediction. As the name suggests, the idea is to predict an
observation, y(n-M) , based on a linear combination of "future" samples. The
equation for backward prediction is
M
bM = y(n-M) - L gty(n-i+l)i=1
(2.64)
where bM
, is the backward prediction error. A derivation similar to the one in Section
2.1 may be followed to obtain the Wiener-Hopf equations for backward prediction.
The interested reader is referred to (Haykin, 1992).
The relationship between the backward prediction weights, g and the forward
prediction weights, w is given by (Haykin, 1992),II
The backward weights are simply the forward weights in reverse order and
conjugated.
To further simplify the lattice structure, a new vector will be defined
(2.65)

24
Durbin algorithm, the mth order forward predictor may be expressed as
(2.67)
Similarly, the update recursion for the mth order backward predictor is given by
The data input vector may be written as,
r , ..(n)] [y(n)]' ..+I(n) = !y<n-M) = , ..(n-l)
The forward prediction error is defined as,
Using (2.67) and (2.69),
[H ] r' ..(n) ] _".-1 0 L. - fm-1(n)
l.Y(n-M)
and
*[ -T] [ y(n)] *k",O tJ.._1 , ..(n-l) = k",b",_t<n-l)
(2.68)
(2.69)
(2.70)
(2.71)
(2.72)
The combined results of (2.71) and (2.72) yields one of the two key lattice recursive
equations,

fm(n) = f m- 1(n) + k;bm_1(n-l)
The other one, obtained in the same manner is
25
(2.73)
(2.75)
bm(n) = bm_1(n-l) + k,j",(n) (2.74)
Equations (2.73) and (2.74) make up one stage of a lattice filter, Fig. 2.2 (a). The
zeroth order lattice predictor is
fo(n) = bo(n) = y(n)
The Mth order lattice predictor is shown in Fig. 2.2 (b).
The lattice filter structure has several interesting properties: 1) the various
stages of the lattice are decoupled such that the backward prediction errors produced
by each stage are orthogonal. 2) The lattice filter is modular. Stages may be added or
removed without affecting previous calculations. 3) The lattice stages are identical
which lends itself to VLSI implementation.

(a)
26
y(n)
stage1
stage2
stageM
Figure 2.2: Lattice Filter
(b)
~----' b (n)M

27
Chapter 3: Adaptive Algorithms
3.1. Introduction
In Chapter 2, two optimal filter algorithms were discussed, the Method of
Steepest descent, and the Levinson-Durbin algorithm. Also introduced were two
adaptive filter structures, the transversal or direct filter and the lattice filter. The
algorithms presented in Chapter 2 have little practical value for this particular
application due to the fact that they require knowledge of the second order signal
statistics. In this chapter, some common adaptive filter algorithms which overcome
this limitation are introduced. The algorithm properties of computational complexity
and stability are examined. These properties, along with other performance issues will
aid in selection of one or two algorithms suitable for this application. Note that since
this application operates in "real time", block filtering techniques will not be
considered .
Adaptive filter algorithms are normally divided into categories according to
some cost function .". The two categories of algorithms considered for this
application are the Stochastic Gradient algorithms and the Least-Squares algorithms.
Table 3.1 shows the division of adaptive algorithms by cost function and structure.

28
Stochastic Gradient Least Squares
LatticeI
LatticeTransversal Transversal
LMS GAL FTF LSL
NLMS RLS LSL w/errorfeedback
Table 3.1 Adaptive Algorithms
The Stochastic Gradient algorithms are based on the Method of Steepest
Descent. (section 2.2). The cost function of these algorithms is the mean-squared
error, " = E{le(n) 11} . Unlike the method of steepest descent which uses the
instantaneous gradient of the performance surface, stochastic gradient algorithms
estimate the gradient using the current data vector. The gradient estimate is given by:
V(J(n)) = -2y(n-l)y*(n) + 2y(n-l)yH(n-l)w(n)
The best known of the Stochastic Gradient algorithms is the Least Mean Square
(3.1)
(LMS) algorithm. The LMS algorithm was derived by Widrow and Hopf in 1960.
The simplicity of the LMS algorithm has led to its wide-spread use. The LMS has
also become a benchmark for comparison with more complex algorithms.
Other Stochastic Gradient algorithms considered in this study are the
Normalized LMS (NLMS), and the Gradient Adaptive Lattice (GAL). The NLMS
algorithm was derived in 1967 by Nagumo and Noda, and independently by Albert

29
and Gardner. The NLMS is similar to the LMS algorithm but it incorporates a time-
varying step-size. The Gradient Lattice derived by Griffths in 1977, incorporates the
desirable numerical properties of the lattice filter with the computational simplicity of
the LMS algorithm.
The Least Squares algorithms, as the name suggests are based on the method
of Least Squares. The method of least squares is attributed to Gauss and the
estimation of asteroid orbits (Alexander 1986). Specifically, consider the method of
exponentially weighted least squares. The cost function for these algorithms is
II
'P = L An-i le(,) 12;=0
Because these algorithms do not attempt to minimize a statistical error, they are also
known as exact least squares algorithms. Least squares algorithms all yield the same
solution to a filtering problem. They differ only in form and complexity.
The conventional Recursive Least Squares (RLS) filter, requires a matrix
inversion and is O(M2) where M is the filter order. Several fast RLS algorithms have
been developed which reduce the computational complexity to O(M).
The Fast Transversal Filter (FTF), developed by Carayannis et al in 1983 and
independently by Cioffi and Kalith in 1984, is a combination of four transversal filters
working in parallel to produce the least squares solution.
The least squares lattice (LSL) is generally attributed to Morf. There are
several versions of the LSL, and the interested reader may refer to (Haykin 1992) or
(Friedlander 1982) for details.

30
3.2. Computational Complexity
The first property of adaptive algorithms considered is computational
complexity. Simply, this is the number of arithmetic operations that the algorithm
requires. Usually this is expressed in terms of the filter order M. The computational
complexity of an algorithm directly affects the cost of implementation. The cost
comes in terms of added storage requirements and delay.
As noted above, the conventional RLS algorithm is O(M2) . The fast RLS and
the Stochastic Gradient algorithms are all O(M) in complexity. One important point in
considering complexity is that for this application, a large number of parallel filters
will be implemented. This means that any increase in complexity will be magnified in
the final system. Table 3.2 lists the various algorithms and their computational
complexities. (All operations are complex.)
3.3. Finite Precision Effects
When an adaptive algorithm is implemented using finite precision arithmetic,
there are two effects that need to be considered: numerical stability and accuracy. An
adaptive algorithm is stable if the use of finite precision arithmetic results in bounded
deviations from the infinite precision form of the algorithm (Haykin 1992). Accuracy
refers to the magnitude of those deviations. An important note is that stability is a
function of the algorithm and not the number of bits used. Accuracy on the other hand
is a function of the number of bits.

31
Algorithm Multiplies/ Additions/Divides Subtractions
Least-Mean-Square 2M+l 2M(LMS)
Normalized Least- 3M+2 2MMean-Square (NLMS)
Gradient Adaptive 8M 6MLattice (GAL)
Fast Transversal 7M+l1 5M+6Filter (FTF)
Least-Squares 16M+2 6M+lLattice (LSL)
LSL with error 18M+2 7M+lfeedback
Recursive Least- 3M2+11M+8 2M2+6M+4
Squares (RLS)
Table 3.2 Computational Complexity
Numerical instability is the result of the build up of quantization errors which
results in an overflow condition. Quantization errors come from two sources: 1) the
analog-to-digital conversion; and 2) round-off errors after arithmetic operations. Some
factors that affect quantization errors are the type of numerical computation, the
condition of the autocorrelation matrix and the algorithm itself. For this application,
the adaptive filters will be operating on a continuous basis and any instability is
considered unacceptable. Details on the propagation of quantization errors are
presented in (Haykin 1992), (Cioffi, 1987), (Ljung and Ljung, 1985) and (Caraiscos

32
and Liu, 1984). The important stability and accuracy results from these and other
references are summarized below.
The LMS algorithm is susceptible to quantization errors. It may be stabilized
by a technique known as leakage or by the addition of a white noise source to the
weight input vector y(n-l). In our application, the channel noise fulfills this role.
The NLMS algorithm may be stabilized using the same methods (Weiss and Mitra,
1979).
The FTF and RLS algorithms are widely known to be numerically unstable.
Two methods discussed to compensate for FTF instability are periodic reinitialization,
and the use of rescue devices (Haykin 1992). The rescue device incorporates
monitoring of a specific variable in the FTF algorithm, and starting a "backup" filter
when this variable becomes negative.
Finally, we consider the-lattice filters GAL and LSL. The lattice structure is
widely regarded to have better numerical- properties than the transversal structure. The
lattice is less sensitive to quantization errors. The use of error feedback to update the
reflection coefficients also improves the accuracy of the algorithm. Details on the
accuracy of adaptive filters is given in (Haykin 1992) and (proakis 1989).(Ljung and
Ljung, 1985) show that the LSL filter is exponentially stable with regard to round-off
errors and other numerical disturbances.
3.4. Performance Considerations
Based upon the discussion of sections 3.2 and 3.3 it is now possible to

33
eliminate some algorithms from consideration. Due to instability, the FTF and
conventional RLS may be ruled out. At this point, the LMS algorithm may also be
discarded. The LMS uses the same step-size bounds as the method of steepest
descent, Eq. (2.43). Lack of knowledge of the channel statistics make selection of an
appropriate step-size impossible. Before eliminating any more algorithms, some
performance issues must be considered.
The two performance issues we will consider are convergence rate and
tracking ability. The convergence time of an adaptive algorithm is the time required
for some performance measure to drop below a specified level (Cioffi, 1986). The
tracking ability of an algorithm refers to how well it follows statistical variations in
the input signal. The tracking. ability of an algorithm is related to the algorithm
parameters. Proper selection of the algorithm parameter is a balance between the
conflicting requirements of minimizing excess MSE when the channel is stationary,
and minimizing MSE due to the changing signal statistics. (Excess MSE is a result of
estimating the signal statistics)
Recall for this application, there is a low SNR and a slowly time varying
channel signal. Two studies that are of particular interest are (Cioffi, 1986) and
(Bershad and Macchi, 1990). The first by Cioffi provides guidelines as to when the
RLS algorithms result in superior performance over the LMS. The second reference
deals with the ability of the LMS and RLS to track a chirped sinusoid in white noise.
The results of these studies indicate that for our application, the RLS algorithms offer
no significant performance advantage.

34
Chapter 4: Algorithms
4.1. Normalized Least-Mean Square
The first algorithm considered for this application is the NLMS. The NLMS
retains the computational simplicity of the LMS, but its time-varying step-size makes
it more practical for non-stationary filtering environments.
The derivation of the NLMS follows the one presented in (Haykin, 1992). A
similar derivation may be found in (Nagumo and Noda, 1967).
The NLMS algorithm may be viewed as the solution to a constrained least-
squares problem. The problem at hand is to minimize the squared Euclidean norm of
the change in the weight vector,
aw(n+l) = w(n+l) - w(n)
given the constraint that
wH(n+ l)y(n-l) = y(n)
(4.1)
(4.2)
The solution of the problem is carried out using Lagrange multipliers. The
squared norm of (4.1) is expressed as
M
II~w(n+l)112 =E Iwi(n+l ) - wi(n) 12i=1
or in real and imaginary parts (Haykin, 1992), as
(4.3)

35
M
J(n) = E( [a,(n+l) - a,(n)j + [b,t(n+l) - b,t(n)j) (4.4);=1
where
(4.5)
Letting
a real-valued cost function may be defined as
J(n)= A1[Yt(n) - !t(aj(n+l )Yt(n- i) + bt(n+l)Y2(n-O)]
+ A2k2(n) - it (aj(n+ 1)Y2(n-l) - bj(n+ l)Yt(n-i»)]
where Al and A2
are Lagrange multipliers.
(4.6)
(4.7)
The optimum weight values are found by differentiating (4.7) with respect to
ai(n+1) and bi(n+1), then setting the resulting equations equal to zero. Differentiation
with respect to a;(n+1) yields
(4.8)
and the result of differentiation with respect to b;(n+l) is
(4.9)
(4.8) and (4.9) may be combined into a complex equation

i=1,2,...,M
36
(4.10)
where A=Al +jA2
is a complex Lagrange multiplier. The solution of (4.10) for the
unknown A*, using the constraint equation, is
Using the definition of the prediction error, (4.11) may be reduced to
A* = __2_- e*(n)Ily(n-l) 11
2
Substituting (4.12) into (4.10) yields
5w(n+l) = 1 y(n-l)e*(n)Ily(n-l) 11
2
(4.12)
(4.13)
Control over the change in the tap weight vector is obtained by introducing a
real positive scalar J.L. The final form of the NLMS weight recursions is
w(n +1) = w(n) + JJ. y(n -1) e*(n)Ily(n-l) 11
2
The bounds on ~ for mean-square convergence are
(4.14)
(4.15)
Selection of J.L' involves the performance trade-off between convergence and tracking
ability vs. steady state MSE.
An analysis of NLMS convergence is beyond the scope of this thesis, the

reader is referred to (Bershad, 1986) or (Slock, 1990) for further details. The main
result of interest is in the comparison of excess MSE between the NLMS and the
LMS. From (Bershad, 1986), the increase in misadjustment for the NLMS is
(1-2/M)-1. For a fifth order filter, this is an increase of about 66%. In this
application p. will be rather large due to convergence and tracking considerations.
This also increases the excess MSE and may result is unsatisfactory NLMS
performance.
4.2. Gradient Adaptive Lattice
The second adaptive filter considered for this application is the Gradient
Adaptive Lattice (GAL). The GAL has performance abilities similar to those of the
least-squares lattice but at a much lower computational cost. The GAL has one and
two reflection coefficient versions. By the two coefficient version we mean that the
reflection coefficients for a single stage are not identical. Again, to reduce
computational cost, only the one coefficient form is considered. The two coefficient
form may be found in (Friedlander, 1982) or (Haykin, 1992).
The specific GAL algorithm used in this thesis is found in (Proakis, 1989),
and therefore that derivation is presented here.
Recall the two equations that define a lattice stage
37

38
f".(n) =f",-t(n) + k".(n)b"'_l(n-l)(4.16)
The performance criteria to be optimized is
11
Jm =I: 1"-i[lfm(n) 12 + Ibm(n)12]
i=O
(4.17)
where "', is a positive real constant, '" s 1 known as the forgetting factor. This gives
the algorithm a finite memory that improves performance in non-stationary
environments. Differentiation of (4.17) with respect to k yields",
(4.18)
II
-2 L AlI-if"'_l(n)b~_l(n-l)i=O
n
L 1,,-i[lfm_t(n) 12 + Ibm_t(n-l) 12]i=O
k".(n) = -----------
The numerator and denominator, of (4.18) may be updated using the recursive
equations (Proakis, 1989)
u",(n) = AU".(n-l) + 2f,"_1(n)b~_1(n-l)(4.19)
then,
k (n) = _ "m(n)". y".(n)
(4.20)
k".(n) may also be updated recursively as

39
(4.21)
Note that in Eq. (4.17) a least-squares performance criteria is employed. The
gradient based derivations in (Haykin, 1992) and (Alexander, 1986) yield the same
algorithm.
The (GAL) algorithm has several attractive features. The parameter Y",(n) ,
which represents the energy in both the forward and backward prediction errors up to
and including time n, introduces a form of normalization into the reflection coefficient
update equation. When the prediction is accurate, Y",(n) is small and the "step-size"
is large. This allows for rapid tracking of non-stationary signals. In a high-noise
situation, the forward and backward errors may be large. Then, y",(n) is large and
the corresponding change in the reflection coefficient is small. This effectively
prevents the filter from trying to track the white noise. In general, the GAL also has a
faster convergence rate than the LMS. The GAL offers rapid convergence and
tracking ability without introducing the excess MSE of the NLMS.
Analysis of GAL convergence is very difficult and beyond the scope of this
thesis. The interested reader is referred to (Honig and Messerschmitt, 1981) or (Ling
and Proakis, 1985) for further details.
4.3. Prediction-to-Estimation
Recall from Chapter 1 that the purpose of the reference signal is to supply the

40
channel tap weights for use in the Rake Correlator. To increase performance of the
Rake correlator, the current tap observation should be used in forming the estimate
(as opposed to simply increasing the filter order). This will insure a minimum
probability of bit error corresponding to the Instantaneous Reference case described in
(Smallcomb, 1992). Recall that the linear prediction of the tap is composed of the
previous M observations.
In a manner similar to the time averager, the tap estimate will be formed based
on a weighted combination of the current observation and the current prediction.
h = «y(n) + (l-u)y(n)
The current observation y(n) is given by:
yen) = hen) + v1(n)
where h(n) is the channel signal and vt(n) is the channel noise. The current
prediction, y(n) , may be defined as:
yen) = hen) + v2(n)
(4.22)
(4.23)
(4.24)
where v2(n)
is the prediction noise. u is a scalar, 0< a < 1. Substitution of (4.23) and
(4.24) into (4.22) yields:
h(n) = h(n) + «v.(n) + (l-«)v2(n)
From (4.25) the estimation noise v3(n)
is defined as:
(4.25)

41
(4.26)
The power in the estimation noise is
(4.27)
since it can be shown that
(4.28)
The parameter « is now calculated in order to minimize the estimation noise
power. Differentiating (4.27) with respect to « and setting the result to 0 yields
ex =--------
Dividing both sides by 2 and solving for « results in
E{ Iv1(n) 12}
E{lvt(n) 11} + E{lv2(n) 1
2}
An estimate of the power of vt(n) may be made at the front end of the
(4.29)
(4.30)
receiver based on a small signal power assumption. However, v2(n)
is not directly
available. To estimate of the power in v2(n)
it is necessary examine the adaptive filter
error signal e(n). The prediction error signal is defined by
e(n) = y(n) - y(n)
Using (4.23) and (4.24), (4.32) reduces to
(4.31)

42
(4.32)
The power in e(n) , using (4.28), is
Substitution of (4.33) into (4.30) provides the final result for u
(4.33)
ex =E{ le(n) 12} - E{ Ivt(n) 12}
E{le(n) 12}
(4.34)
Having derived the equation for u, it is now possible to examine its behavior.
the limits 0 s (X s 1 are met. The behavior of « in a variety of situations is also of
interest. First, consider the noise only case. Adaptive filters are unable to track white
noise, therefore, j(n) =0 and E{le(n) 12} =E{lv1(n) 1
2} . This makes «=0 and the tap
estimate is h(n) =y(n). Next consider the worst possible channel signal. Assume the
channel signal is a white random process. Without the modification, the channel tap
estimate would be approximately zero and system performance would be severely
degraded. With the modification, it is easily shown that
(4.35)
and the estimate is h(n) = ex y(n). This will be sufficient to insure system

43
performance equal to that of the instantaneous reference case described in (Smallcomb
1992). The optimum performance of this system occurs when E{lv2(n)
12} :Jmjn' in
this situation,
«opt =
and the estimation noise is given by
Jmin (4.36)
(4.37)
Equation (4.36) shows that the minimum estimation noise is a function of the input
noise level and the adaptive filter order.
The cost of implementing the modification is outlined in Table 4.1
Step Multiplies/Divides Adds/Subtracts
Recursive Power 3 2Estimate
Compute alpha 1 1
Form estimate 2 2
Table 4.1 Prediction to Estimation Cost
The total cost of the modification is 9 multiplies/divides and 7 adds/subtracts. This is
approximately equal to the computational cost of one gradient lattice stage. By using
the prediction to estimation modification, it is hoped to realize the benefits of using
the current channel observation at a rather small increase in computational cost.

44
Chapter 5: Computer Simulations/Results/Conclusions
5.1. Computer System
The final step in selecting an adaptive filter for this application is a variety of
computer simulations to measure filter performance for a variety of channel
conditions. These simulations were performed using the Block Oriented System
Simulation (BOSS) software package produced by Comdisco Inc. The BOSS software
operated on a Sun Sparc2 Workstation.
The BOSS library contains a large number of modules that perform various
signal processing tasks. The BOSS interactive environment allows the user to create
the desired system in block diagram form. Each of these modules represents a
FORTRAN subroutine, and BOSS creates the simulation program by linking the
subroutines together according to the block diagram connections. The BOSS block
diagrams for the filter used in this thesis are located in the appendix. Although BOSS
performs a time domain simulation of the system, for convenience, the results of the
simulations were plotted using the MatLab software package.
5.2. Chi Conversion Factor
Recall from Chapter 1, the performance measure of the TA filter was
measured in terms of noise reduction, while the performance of the adaptive filters is
measured in MSE. In order to make a fair comparison between the TA and the
adaptive filters, a new conversion factor is introduced.

45
Define a new channel tap estimate as,
(,' = ~h (5.1)
where p is a real scalar. Following the derivation of X in (Smallcomb, 1992) it is
straightforward to show that the amount of noise reduction is unaffected by
introducing p. It is also obvious that the MSE performance criteria is affected by use
the new estimate. To find the appropriate conversion factor, define the MSE to be
J(n) = E{ Ih(n) - ph(n) 12}
Let the estimate be given by
where v2(n)
is zero mean white gaussian noise. Substituting (5.3) into (5.2) and
expanding yields
(5.2)
(5.3)
(5.4)
Differentiating (5.4) with respect to ~, setting the result to zero and solving for p
yields
(5.5)
Dividing the numerator and denominator of (5.5) by l/v (n) and using the definition. . 1
of X given in Eq. (1.4), (5.5) may be written as

~ = SNR;X + SNRi
where SNR., is the receiver input signal-to-noise ratio.I
46
(5.6)
Equation (5.6) shows that the performance gain of a filter and the MSE are
related by a constant. This constant is dependent upon the input SNR and performance
gain. Multiplying the TA estimate by fl prior to computing the MSE provides and
equal basis for filter comparison.
5.3. Computer Simulations
A series of BOSS computer simulations were performed to measure various
aspects of filter performance. The performance criteria for all simulations was the
MSE, E{lh(n) -h(n) 12} . The key simulation parameters are listed in Table 5.1 The
sampling frequency was chosen to be the system transmission frequency. The NLMS
order was chosen to match the order of the Bessel filters in the channel model. The
order of the GAL filter was selected to equal the computational cost of the NLMS.
The TA constant was set at 0.5 to cover the wide range of channel inputs. The
normalized step size, 1.1. was set to balance the needs of rapid convergence and steady
state error performance. The forgetting factor, A was set for a slowly time varying
channel input.

47
Parameter Setting
Sampling Frequency 62.5 Hz
GAL order 2
NLMS order 5
TA a 0.5
Bessel Filter Bandwidth Doppler Spread
Complex Tone Frequency Doppler Shift
Normalized Step Size 0.2
Forgetting Factor 0.99
Table 5.1 Simulation Parameters
5.3.1. General Channel Conditions
The first set of simulations compares the TA filter with modified versions of
the GAL and NLMS filters. The channel input was selected as either a complex tone
(Doppler shift) or a complex AR process (Doppler spread). The simulations were
performed for various combinations of channel input and signal-to-noise ratio (SNR).
The key to this set of simulations is shown in Figure 5.1. The optimum case was
calculated for a second order filter using Eq. (4.36).

Ideal
(J~ -----------------
NLMS
TA
Figure 5.1: Key 5.3.1 I 5.3.2
48
···························i·····························i·····························t····························t····························t················ .: : : : :
......·····················r····························r·······················:····r····························r····························r························'.'
········fr;,~~:~;:rN,..·-· ...::::.::::J-···..r···'::::::· ···· ·..·..'i:.:·..·· ···..·..·..,:::::j:::::.::::::::::::.::::::::::.:f:::::::::::::::::::::::::::..
\~ ,··················1·····························1····· y + + .: : : : :..........................., ···i·····························~···················· -:- __ -:- .: : : : :
···························i·····························i·····························i···················· + + .~ ~ i ~ ~
0
-1
-2
-.:5
~-4-
~-s
-e5
-7
-80 ~OO 1000 1 SOO 2000 2S00 ~OOO
Figure 5.2: Doppler Shift·1Hz I SNR 0.5
0
-1
-2
-.3
~-4-
~-~
-45
-7
-80 ~OO 1000 ,eoo 2000 2~OO 3000
Figure 5.3: Doppler Shift 1Hz I SNR 1.0

49
-2r--------~------~------__------..,......--------------....,
.: ::::::::::::::::::::::::::::j:::::::::::::::::::::::::::::j:::::::::::::::::::::::::::::r:::::::::::::::::::::::::::r::::::::::::::::::::::::::r:::::::::::::::::::::::::~-!5 ···························1·····························j·····························l·····························t····························t·············· -
- es 1" ···1"····························r····························1····························1················· -
- 7 r-···························i·····························i·····························t····························t····························t··············· -
- e l········;..···············i· ··:.:.:.:.:.:.:.:.:.::.:;:::~.:.:·~·t:.::.::.:::.::;:~·:.::.:.:.::.:.:.::G::.::.::.::.::::.::.::::.::.::~.::=.=.::::.::.:::.::.:.::).:.:.:.:::.::=.::=.::::. :.:.::. :.--9 -~s",~"f :::::: j ···j-······················::···f:::::::::::::::::::::::::f::::::::::::::::::::::::::'
.:50002:50020001:5001000~oo
- 1 0 ~ 060-- 060-- """"-- ""-- ~ ~
o
Figure 5.4: Doppler Shift 1Hz I SNR 2.0
o i ~ 1 i i~ . . . . .-, t···························i·..······················· ; ; ·········t····························t··············· -
1\. . . . . .~. . . , . .
=: ~~~~~~a~~~~:~;j~~~~~~~::::~~~I~~~~~~~~:::~:~]~~~~:::~~:~~~::~::I • • • •
- ~ 1--···························1·····························j·····························t····························t····························t··············· -
- es ···········~···············t························· · · · 1· · · · · · · · · · · · · · · · · · · · · · · · · · · · · !· · · · · · · · · · · · · · · · · · · · · · · · · · · · ·t · · · · · · · · · · · · · · · · · · · · · · · · · · · · t · · · · · · · · · · · -
- 7 1' 1' 1' ······r····························r·················· -
.:50002eoo20001eoo1000~oo-e'-----------------------------.......------~------ .....o
Figure 5.5: Doppler Spread 1Hz I SNR 0.5
Or--------~------~------__------~------ __--------,- 1 ~···························i·····························j·····························t····························t····························t··············· -
- 2 1-···························1·····························1·····························1·····························t····························t·············· -
~ ;~ t~;~~~~I~:~;~;J~:::;::::~:::;;t::::..:.:::::::::::]::_~::.:::::::.:.::.:~..--..;
-." _ j l l ,i. l -1 ~ ; ~ ;
.:50002:50020001:5001000~OO-Bo~----- .L-------.L-------.L------_..&....._-----...L-_----_....J
Figure 5.6: Doppler Spread 1Hz I SNR 1.0

50
-2r---------.--------,...---------..--------,...----------....--------,. . . . .
-.3 ~···························t····························t····························r······················ · · · · · · r · · · · · · · · · · · · · · · · · · · · · · · · · · · · r · · · · · · · · · · · · · · · · · -
- 4 1' 1' 1' ······r····························r·················· -
-~ ···························1·····························i·····························!"···················· : ~ -
- C!S ••••••••••••••••••••••••••• ~••••••••••••••••••••••••••••• ~•••••••••••••••••••••••••••••~ ••••••••••••••••••••••••••••~ ••••••••••••••••••••••••••••~ ••••••••••••••••••••••••••• -r. : : : : :
.: ~~~~1~=~~~~:~~~~t~~~~~~::::~~~:1~~~~~~::~~::::::~:1~~~ ~~::~~::: :~~:- 9 :·~w::·············l·····························j·····························j·····························t····························t·························..-
':'00025002000.,eoo1000~oo
-., 0 '----------"--------'----------'--------'---------...--------'o
Figure 5.7: Doppler Spread 1Hz I SNR 2.0
2r-------........-------~------_._------- __------_.....----------,.
, >-••·························1·····························r···························t····························t··..························t····················· -o 1' ··r····························r····························T····························T·················· -
-., ~ ~ .;. -:- .;. --2 t~~::::==..j === j.~~ + =+ ---+.~ ~.=, . . . . .-3 ~,~~..:~J:~~=::.:.~:j.,~::::~:~~~~~~::::+:::::::::::~::::,,::~::;t::;:::::::::::::::::::::;;'t"''''''''··'m''......'''~-4~_~.....=..;;;.... __-+-__~....;......;..~~~:::.J=:.:.:::.:::.:;;;;.:::=.:::.a.....-...a.I-.:::.:a::a.a.I ..- -+ -i
- ~ ~ j ·····l·····························j·····························t·..·························t·············· -
.30002~0020001~001000~oo-e'----------"--------'----------'--------&..-------~-------~o
Figure 5.8: Doppler Shift 10Hz I SNR 0.5
Or--------""""'!"'"-------.-.--------_._-------..--------_.....-------.,- 1 ···························t····························t·····,,······················1·····························r ····························r ··············· -
=: ~5?~==r= : == I =r:::::::::::::::::~::::::~~::::~~- 4 , •..•••......•..••..•••..•..1- j 1- ········t····························t················ -
=: :~~~~;~~~~~~~~~4~~~:~~~-~::::t:~:=:::::::~=::=~=t~:::: :::: : : ::=::=;l;; ;; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ~ ; ; ; ;~- 7 ~ ~ ····~···.·.···· ··· ···· ·.t..· + + -
~ ~ ~ i ~
~ooo2eoo20001eoo1000~OO-eO'--------.&..-------'--------~-------"--------........-------~
Figure 5.9: Doppler Shift 10Hz I SNR 1.0

51
- 2 r----- --------.------~-----_r_-----..,------___,
.: ~~·::···===r=~~:==~:~=t==··t····===····t===-e ·························..1..···························1·····························1······················ j -r -
- 6 1···························1·····························1·····························1·····························t····························t·············· -
- 7 ~~ j j y y y -
-15 ~~tt~~~~~:i:~··········~~~~:····+······················+ ~~~~ + -- 9 '""'···························t························· · · · ~ · · · · · · · · · · · · · · · · · · · · · · · · · · · · · i· · · · · · · · · · · · · · · · · · · · · · · · · · · · · t · · · · · · · · · · · · · · · · · · · · · · · · · · · · t · · · · · · · · · · · · · · · -
30002~0020001~001000~OO- 1 0 '--------------~------"--------------~-------"o
Figure 5.10: Doppler Shift 10Hz / SNR 2.0
2r--------------.-------------..,__------.---------,. . . . .
1 ~························· ..1·························· 1' ···················t····························t····························t···························-
o '""' !" !" ~ ]" ]" ]" -
- 1 '""'·····~~;.~;-:;;;c:.:.:..:;::;.::r:;::;:::~:::.::;:;:::::::::~::::::::::::.:::::.::::::.::::::~:::::::::::::::::::;::;;:;::+::::::::::::::::::::::::':::r::::::::::::::::::::::::::::
- 2 _.:r: ~ ~ ·~··············~.;.;c~b····.::.::··:::===-;~.;;J.;.;:.:.:.::.::.::.::.::.;;=~;.~::.c;;::.&-s·s-ii·~=:·:-:.-:;
.:50002!50020001!500'tOCO~OO-t5 ~--------'_._---~----------""------~-----..........----~
o
Figure 5.11: Doppler Spread 10Hz / SNR 0.5
:::::::::::::::::::::::::::r::::::::::::::::::::::::::T:::::::::::::::::::::::::l:::::::::::::::::::::::::::r:::::::::::::::::::::::::T:::::::::::::::::::::::::
·····;~;;;.;·:;:;:;::t~~~=~===~~::~=$:::.:.:.~~¥:;:~:·~·::::::-=·
0
-1
-2
-:5
~-4
~-!5
-t5
-7
-s0 ~OO 1000 1eoo 2000 2!500 3000
Figure 5.12: Doppler Spread 10Hz I SNR 1.0

52
.30002~0020001~001000~oo
-8 ILI..-- ....&....- ~ __L_ ____a._ _____
o
Figure 5.13: Doppler Spread 10Hz I SNR 2.0
5.3.2. Tracking Ability
In this set of simulations, the channel was modeled by a chirped complex tone.
Two chirp rates were simulated. The "fast" chirp frequency was 0.625 Hz. This
corresponds to one complete chirp cycle every 100 samples. This is roughly the
memory of the GAL. The "slow" chirp frequency was selected as 0.0625 Hz. The
SNR in both simulations was 1.0. Figure 5.14 shows the chirp and the modified GAL
estimate.

53
1 .~ r--------,.----...,...----__-----,.-----,-----__-----,------..------,------,
12001 1 eo11 eo114011201100
\:1
r1015010fSO10....01020
o
-1
o.~
-0.5
,- 1 .~ ~------"----.......----~------"----.......---~~-----I----.......-----"'------'1000
Figure 5.14: Chirped Tone and Estimate
0
-1
-2
-.:5
~-4-
~-5
-fS
-7
................._ ~ _ ~ _~ _ + + .
i~~+~~~~:E:::~::3::::::~:::::::::::::::::r::::~~::::::::r:::::~=:::::·..~\: :~~=::=: ..~.:--::::::::.::: j::~::''':::::::::::::::::::: ;:::::: + + .···························r····························1·····························1'····························r····························r················· .
30002~0020001~001000~oo
-8 "-- ---tl....- ....... ---tlo..- ....... ---'
o
Figure 5.15: Slow Chirp
0
-1
-2
-.3
~ -4-
~-e
-fS
-7
-_ ~ ~ -:- - _ + _ _ ~._ _ _._ .. . . . ., + + + ···f····························f····················· .J : : : : :
\~:;.~~~~:::.::.::.;.:::~.:::=·:.:=:.:.::.::.:.::.::.::~· ..··..····::::::::::::F··.....·::·====··..i......:.:~.:=::=::.:··:::···;·::;::~~::~:::C················:·::=:r::::::~~::::::::::: ..:.:.r-:::::::::::~::::::::::::I:::::::::::::~:=::::::~:r::::::::::::::::::::::~:::
...."oJ .
. ·····r···························1..···························t·······················..··t····························t·········· .••••••••••••••••••••••••••• .& , ••••••••••••••••••••••••••••• , ••••••••••••••••••••••••••••• .;. •••••••••••••••••••••••••••• .;. ••••••••••••••••••••••••• _-
j j 1 l 1
30002~002000,~OO1000~OO-8O--------......---------'''--------~-------L-------.....L-------..J
Figure 5.16: Fast Chirp

5.3.3: Modification vs. Extended Order
Recall that the purpose of modifying the adaptive filters is to improve Rake
correlator performance by including the current channel tap observation. The
simulations performed in this section compare a modified 2nd order GAL and an
unmodified 3rd order GAL. Refer to Figure 5.17 for the key.
Modified2nd Order
Unmodified3rd Order
Figure 5.17: Key 5.3.3
O~---__---_----...-------..----_---_
54
.: :::::::::::::::::::::::::::j:::::::::::::::::::::::::::::j::::::::::::::::::::::::::::r:::::::::::::::::::::::::T:::::::::::::::::::::::::::r:::::::::::::::::::::::::-.:5 ···························i·····························i·····························i···················· ~ : ., : : : : :
-... ~ l. 1. 1 1 1 .
=: ~~~~I:~~~~~~~f~~=~=~==~===~I~~~===~~~~~~~==!==~========~-7 j j ····.·.· ··.·1·.·.·..···········.········.·t····························t························ .-8~ ...t..- ~ ---L.. ---L ~ ---I
o ~oo 1000 1~00 2000 2~00 3000
Figure 5.18: Doppler Shift 1Hz I SNR 1.0

55
.30002.eoo20001eoo1000~oo
. . . . .···························r····························r····························T····························T····························T·················· .
,··························1·····························1·····························+····························f····························t················ ., : : : : :, : : : : :.+ -1••••••••••••••••••••••••••••• -I••••••••••••••••••••••••••••• ~••••••••••••••••••••••••••••• -:-•••••••••••••••••••••••••••••:••••••••••••••••••••••••••••" : : : : :
··::~~;(:~b~;~:~~~::~t~~~:::::=]~~~~~~~~~~~L~~~~~~~~=~~~L~~~=~~~~~~~···························1·························· j r·················· ········1·· ............................1" ··r····························1"····························f····························f·················· .
0
-1
-2
-~
~ -4
~-e
-e
-7
-80
Figure 5.19: Doppler Spread 1Hz I SNR 1.0
0.___----_....._-----.....-------....-------,..---------.-------,-1 ···························1·····························l·····························t····························t····························t················ .
- 2 \ ···························1·····························1·····························t····························t····························t················ ., : : : : :
-3 ~ ~ .; -:. -:. ~ ., : : : : :
- 4 \ j j·····························t····························t····························t··················· .
.: ··::~~~=:~~~~~~~==F=======t=========j~~:::::::::::L~:::~::::::~-7 j" ··1·····························j·····························t·························..·t················· .
30002eoo2000,eoo1000eoo-s '--- ---L. ..L.- ---&- -L- ~ ---I
o
Figure 5.20: Doppler Shift 10Hz I SNR 1.0
or---------r------~---- -----......_-----.___----....,
-4
-e
-e
-7
.30002eoo20001eoo1000~oo
-8 '--- ~ ..L._ ---&- &.._._ ---'
o
Figure 5.21: Doppler Spread 10Hz I SNR 1.0
56
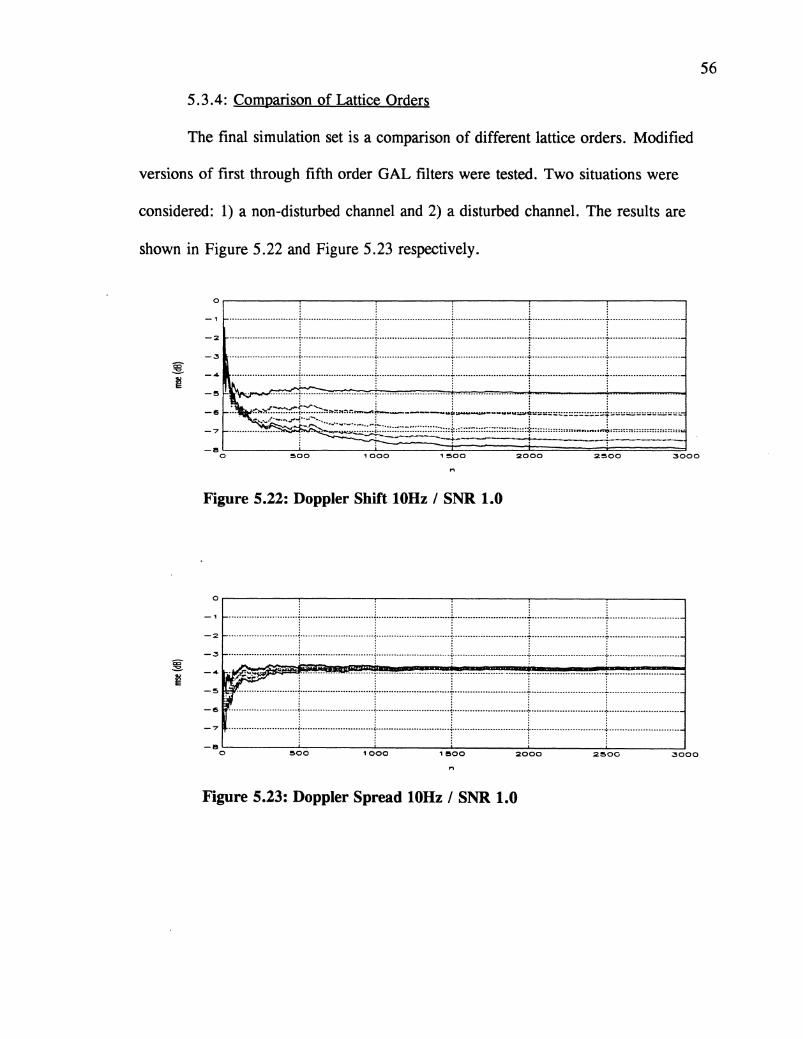
5.3.4: Comparison of Lattice Orders
The final simulation set is a comparison of different lattice orders. Modified
versions of first through fifth order GAL filters were tested. Two situations were
considered: 1) a non-disturbed channel and 2) a disturbed channel. The results are
shown in Figure 5.22 and Figure 5.23 respectively.
30002!50020001!5001000~oo
::::::::::::::::::::::::::l:::::::::::::::::::::::::::r::::::::::::::::::::::::::r:::::::::::::::::::::::::r:::::::::::::::::::::::::r:::::::::::::::::::::::::...........................! ···j·····························i·····························t····························t··············· .
··························1·····························r····························r····························r····························!················· .
0
-1
-2
-.:5Ci5'"~ -4~E
-~
-6
-7
-e0
Figure 5.22: Doppler Shift 10Hz I SNR 1.0
Or------~---__-------..----~----....--------,
-4
-eo ~OO 1000 1!500 2000 .:5000
Figure 5.23: Doppler Spread 10Hz I SNR 1.0

57
In Fig. 5.22, the results show that the higher the lattice order, the better the
estimate. In Fig. 5.23, there is no significant difference between the different filters.
These simulations give a brief glimpse of the performance vs. computational
complexity trade off. Does the increased performance of the higher order filters for
non-disturbed channel conditions justify the increased cost of implementation?
5.4 Conclusions and Recommendations
A review of the simulation results demonstrates the viability of adaptive filters
for this application. In all channel conditions tested, the adaptive filters performed as
well as if not better then the TA filter currently used in the system. The simulations
of Doppler Shift and the Chirped Tone demonstrate the TA's inability to track
complex phase information.
Of the two adaptive filters tested, the 2nd order Gradient Adaptive Lattice
outperformed the 5th order Normalized Least Mean Square in almost all situations.
The NLMS performance is degraded in high noise environments due to the increased
steady state MSE discussed in Section 4.1, while the modified GAL enjoyed almost
ideal- performance.
The simulations also validated the use of the Prediction-to-Estimation
modification. The performance for the modified 2nd order filter offered a slight
improvement over the 3rd order GAL predictor at a computational cost comparable to
the extra lattice stage.
Based on the results presented in this thesis, a Gradient Adaptive Lattice filter

with the Prediction-to Estimation modification is recommended for this application.
The GAL provides the best compromise between performance and the constraints of
computational complexity and numerical stability. Although a 2nd order GAL was
used for the simulations presented here, a final decision on filter order should be a
result of more extensive system simulations based on actual channel data.
58

59
References
Alexander, S. T. (1986). Adaptive Signal Processing: Theory and Applications,Springer-Verlag, New York.
Bershad, N. and O. Macchi (1990). "Comparison of LMS and RLS Algorithms forthe Prediction of a drifting line," Signal Processing V: Theories and Applications,Elsevier Science Publishers B.V.
Bershad, N. J. (1986). "Analysis of the Normalized LMS algorithm with GaussianInputs," IEEE Trans. Acoust. Speech, Signal Process., vol ASSP-34, pp. 793-806.
Bitmead, R. R. and B. D. O. Anderson (1980). "Performance of Adaptive EstimationAlgorithms in Dependent Enviroments," IEEE Trans. Automatic Control, vol. AC-25,pp. 788-793.
Caraiscos, C and B, Liu (1984). "A Roundoff Error Analysis of the LMS AdaptiveAlgorithm," IEEE Trans. Acoust. Speech, Signal Process., vol ASSP-32, pp. 34-41..
Cioffi, J. M. (1987). "Limited-Precision Effects in Adaptive Filtering," IEEE Trans.Circuits Syst., vol. CAS-34, pp. 821-833.
Cioffi, J. M. (1986). "When do I use an RLS Adaptive Filter," Proceedings, 19thAsilomar Conference on Circuits, Syst., and Computers, Pacific Grove, Ca., pp. 636-639. .
Friedlander, B. (1982). "Lattice Filters for Adaptive Signal Processing" Proc. IEEE,vol. 70, pp. 829-867.
Hariharan, S. and A. P. Clark (1990). "HF Channel Estimation Using a FastTransversal Filter Algorithm," IEEE Trans. Acoust. Speech, Signal Process., volASSP-38, pp. 1353-1362.
Haykin, S. (1991). Adaptive Filter Theory 2nd eel. Prentice-Hall, Englewood Cliffs.
Honig, M. L. and D. G. Messerschmitt (1981). "Convergence Properties of andAdaptive Digital Lattice Filter," IEEE Trans. Acoust. Speech Signal Process., volASSP-29, pp. 642-653.
Ling, F. and J. G. Proakis (1985). "Adaptive Lattice Decision-Feedback EqualizersTheir performance and Application to Time-Variant Multipath Channels," IEEETrans. Commun., vol COM-33, pp. 348-356.

60
Ljung, S. and L. Ljung (1985). "Error Propagation of Recursive Least-SquaresAdaptation Algorithms," Automatica, vol. 21, pp. 157-167.
Makoul, J. (1975). "Linear Prediction: a tutorial review," Proc. IEEE, vol. 63, pp.561-580.
Maslin, N. (1987). HF Communications A Systems Approach, Plenum, New York.
Nagumo, J. I. and A. Noda (1967). "A Learning Method for System Identification,"IEEE Trans. Automatic Control, vol. AC-12, pp. 282-287.
Proakis, J. G. (1989). Digital Communications, 2nd 00. McGraw-Hill, New York.
Slock, D. T. M. (1990). "On the Convergence Behavior of the LMS and NLMSAlgorithms," Signal Processing ~. Theories and Applications, Elsevier SciencePublishers B.V.
Sma1lcomb, J. M. (1992). "Spread Spectrum Communication over a Fading MultipathHF channel using Transform Domain Signal Processing and a Transmitted ReferenceSignal" Ph.D. dissertation, Ohio University, Athens Ohio.
Weiss, A. and D. Mitra (1979) "Digital Adaptive Filters: Conditions forConvergence, Effects of Noise and Errors Arising from the Implementation," IEEETrans. on Info. Theory, vol. IT-25, pp. 637-652.
Widrow, B., J. McCool and M. Ball (1975). "The Complex LMS Algorithm," Proc.IEEE, vol. 63, pp. 719-720.

61
Appendix
A: BOSS Block Diagrams
N ~!JJ.
LJ.J ~o 0
t: ~CHI')
<-I
00~

KMN
[>-------~
(>
VMN
C>~-_----I
t>
<l CONST nnGEN ~
[>UNITII] DELAY t> t>
62

63

MODIFIED NLMS
[>T--------------r------
COMPUTE STEP
nnDIVIDER~ZERO[>PROTECT
6
[>
64
[>.

z«:co,-J«
65