combining system and user belief on classification using the dsmt combination rule
DESCRIPTION
The classification process aboard naval warships is becoming more and more complex, due to three main factors.TRANSCRIPT

Combining system and user belief on classification usingthe DSmT combination rule
Wilbert van NordenDefence Material Organisation
CAMS - Force VisionDen Helder, the Netherlands
W.L.van.Norden @forcevision.nl
Fok BolderheijDefence Material Organisation
CAMS - Force VisionDen Helder, the NetherlandsF.Bolderheij @forcevision.nl
Catholijn JonkerMan-Machine Interaction GroupDelft University of Technology
Delft, the [email protected]
Abstract - Having a correct and timely classificationsolution for objects has become increasingly importantas well as increasingly difficult to obtain in newmaritime military missions; a decision support system istherefore needed. In decision support systems achallenge lies in how operator and system belief can bereconciled. This paper presents a support system for theclassification process using Dezert-Smarandache theory(DSmT) for information fusion. This system isimplemented to test these concepts in practise. With thisimplementation we show that our methodology providesthe operator with various levels of interaction with thesystem. The interface also shows the belief state of thesystem at any given time, increasing operator trust in thesystem.
Keywords: Classification, Dezert-Smarandache Theory,Human-Computer Interaction, Reasoning withuncertainty.
1 IntroductionThe classification process aboard naval warships isbecoming more and more complex, due to three mainfactors. Missions now are typically executed in littoralwaters where rapidly changing environmental conditionsmake sensor performance harder to predict and enablehostile forces to stay hidden longer. Thus, the reactiontime is diminished.Furthermore, today's missions are characterised byasynchronous threats and missions draw more mediaattention. The first makes classification itself harderwhereas the latter results in high pressure not to makemistakes, see [1].The last factor refers to developments contradictory inimpact: sensor systems are becoming increasinglycomplex, requiring increasing technical knowledge levelsof the operators to optimally deploy the available sensors.On the other hand there is a strive to reduce the ship'scomplements and to reduce the training time for operatorsdue to budget cuts.Deploying sensors optimally is important for the overallpicture compilation process and therefore for theclassification process as well. Sensors can reduce the
amount of uncertainty in the compiled picture, thus theinput of the classification process is as correct andaccurate as possible. When sensors are not deployed in anoptimal fashion, much uncertainty occurs on the input ofthe classification process, reducing classification accuracy.Intelligent classification support can alleviate theseproblems. This paper focuses on the required cooperationmechanism between operator and system when automatedclassification is possible. In section two we will start withthe background of this research, which is part of a largerongoing research program. As an information combinationmethodology we choose to use Dezert-Smarandachetheory (DSmT), which is briefly discussed in section three.How this theory can be applied in the field ofclassification in military command and control systems isdiscussed in section four. Section five explains how theoperator can exert influence in the resulting classificationsystem using DSmT. The implementation of this system isdiscussed in section six. Finally, sections seven and eightdiscuss future work and the conclusions of this research.
2 BackgroundThe research presented in this paper is conducted as afollow up on the STATOR1 project: a collaborationbetween the Royal Netherlands Navy, the InternationalResearch Centre for Telecommunication and Radar of theDelft University of Technology and Thales theNetherlands. Focus of this project was the management ofsensor suites on single or multiple platforms and the fusionof the data provided by these sensors. The goal is todevelop a decision support system where the operator cancommunicate with the sensor suite(s) as a whole inoperational parameters without the need for technicalknowledge. The overall concept used for this is discussedin [2]. We want to manage the whole suite because sensorscan give similar and/or complementary data. Exploitingthis, means that the sensor suite should be considered as awhole by the sensor manager.
1 STATOR: Sensor Tuning And Timing on Object Request

2.1 Sensor Management
Previous research, [3], shows that sensor managementseeks to compile and maintain a picture of theenvironment which is complete and accurate. In [4] athree-stage sensor manager is introduced based on thisnotion. The first stage determines the sensor task thatneeds to be executed in order to reduce the maximumamount of uncertainty in the compiled picture. Since theuncertainty in classification can be reduced in variousways, [5], and because this uncertainty reduction isimportant in achieving situation awareness, it seemslogical to look at the classification process within thebroader study into sensor management. More informationabout the three-stage sensor manager can be found in [2].
2.2 Classification
Having a good and timely classification solution is of vitalimportance to mission success in many fields. Before thiscan be done however, we need to describe:
1) what classification is;2) what a good classification solution is; and3) what a timely solution is.
The answer to the first question is described in sectionfour, but in short: classification tries to recognise theobserved object with as much detail as possible, e.g.recognising that a surface contact is the HNLMS2 Trompof the Dutch Air Defence and Command frigate class.Whereas identification, which is generally used for thismost detailed classification stage, is the process that triesto solve whether the object is friendly, neutral or hostile.A good classification is the solution where a sufficientamount of detail is obtained. E.g., the distinction betweentwo types of sea skimming missiles is not very important:both will most likely destroy the ship so risk-wise they areequal. Distinguishing between an airliner and a fighterhowever, is important because the first constitutes far lessrisk than the latter. The definition of risk that we use andhow it is calculated can be found in [6]. Besides theadvantage of reducing the uncertainty in the risk posed byan object, a good classification also improves radarperformance in tracking, as shown in [7].In the military field, the starting point is to assume theworst-case scenario. For incoming objects this means that,at a certain point in time, precautionary actions must betaken. Before this happens, a classification solution couldnegate the necessity of actions thus preventing collateraldamage. A timely solution is therefore the solution thatreduces enough class uncertainty for deciding onappropriate actions.In the classification process we search for a good andtimely solution. This search space needs to be modelled inorder to use automated classification techniques. This
2 HNLMS: Her Netherlands Majesty; The prefix for allships of the Royal Netherlands Navy.
model should facilitate the requirements needed to findcorrect and timely solutions: the model needs to facilitatespecific as well as more generic solutions. In section fourwe will discuss how the search space is modelled in thefield of classification.
2.3 Interaction with the operator
Operational command and control systems in use with theRoyal Netherlands Navy rely on operator knowledge,especially the classification process. However, new typesof missions require more support for the classificationprocess during missions. This does not mean that theoperator should not classify: the operator should always beenabled to give the classification solution.It is known that operators are not always best suited tosolve complex problems in time. We therefore want toexplore the possibility of more cooperation between thesystem and the operator, where each is responsible for thetask they are best suited for. The operator makes tacticaldecisions and gives operational information relevant to themission whereas the system can perform computations tosolve the more technical problems. When cooperating, theoperator needs to be able to trust the system. In order toearn operator trust, the system must be able tocommunicate its belief state and be able to explain itsactions. The result is an architecture where the systemsbeliefs are combined with the user's belief in order to findgood and timely solutions and where both belief availableto the system are visualised.
3 DSmT combination ruleDezert and Smarandache introduced a theory oncombining paradoxical, uncertain, and impreciseinformation from various sources in [8] and this theory hasled to many implementations as can be seen e.g. in [9] and[10]. This theory (denoted as DSmT) is detailed in [8], [9]and [10], and is discussed shortly in this section. We thencontinue with the Proportional Conflict Redistribution rule(PCR63
) , [11], [12] and [13].
3.1 General DSmT
In this section we briefly discuss the basic concepts ofDSmT that we use in the field of classification, namely thebasic model, the belief function and the differentcombination rules.
3.1.1 The modelLet e ={Ol' 02 ,..., On} be the frame of discernment with
exhaustive elements 0i' This model is called free when no
assumptions are made about the hypotheses 0i except for
the exhaustiveness.
3 In [12] general PCR-rules are described; we however willonly discuss and use PCR6.

This model does not fit most real-life problems since somecombinations of hypotheses are time dependent or are notvalid anymore when more knowledge becomes available.A hybrid model, denoted M, can be constructed to dealwith these integrity constraints.The cornerstone of DSmT is the free Dedekind latticedenoted in DSmT as the hyper-power set. This hyper-
power set, DE>, is defined as the set of all compositepropositions built from elements of 0 with u and noperators such that:
1. 0,°1,°2" " , On E DE> ;
2. If A,BE DE> then AuBE DE> and
AnBE DE>;
3. No other elements belong to DE> except thoseobtained using rules 1 and 2.
The cardinality of the hyper-power set for n ~ 1 followsthe Dedekind sequence (i.e., 1, 2, 5, 19, 167, 7580,7828353, ...) as shown in [9]. Tombak et aI., describe theanalytical form of this sequence in [14]. From the frame of
discernment 0 a map is defined m(.): DE> -7 [0,1] :
m(0) =0 and Im(X)=I.XEDE>
The quantity m(X) is called the generalised basic beliefassignment (gbba) of X, also called the generalised massofX.
3.1.2 Combination rules in DSmTThe classic DSmT rule of combination holds when themodel is free. When k independent sources give theirbelief masses according to m 1(.), ... , mk (.) , the combination
rule for "IX E DE> is given in equation (1).When the classic rule of combination is used in real-lifefusion problems so-called integrity constraints must betaken into account to impose assumptions about themodel. In such cases, the hybrid rule of combination for kindependent sources with belief assignments m1(.), ... ,mk (.)
is defined for VX E De by equation 2.
m/(X)= I ITm;(y;) (1)
Yl, ,yk EDE> i=1Yln nYk =X
meDSmH (X )=~(x ).[S1(X )+ S2 (X )+ S3(X )] (2)
In equation (2) all sets are in the canonical form and ~(X)
is the characteristic non-emptiness function of a set X, i.e.~(X )=1 if X ~ 0 and ~(X )= 0 otherwise, where
o={0,0M }. 0M is the set of all elements of DE> which
have been forced to be empty through the constraints ofthe model M and 0 is the classical empty set. In equation(2) the following is defined:
k
SI(X)= I ITmi(Yi)Yl, ...,yk EDE> i=1Yln, ...,nYk =x
k
S2(X)= I ITmi(Yi)
~'~ffv[(~E0)I\(X=It)]i=1
k
S3(X)= I ITmi(Y;)
Yl, ,yk EDE> i=1Yl u uYk=XYln nYkE0
with U=u(Yi)u ... uu(Yk ) where u(Y) is the union of all
0i that compose Y. and It is the union of all elements in
o , in other words: total ignorance.Since it is not always desirable to transfer conflicting massto relevant ignorance, other combination rules weredeveloped. Here, we choose to use the PCR6 combinationrule, [11], to avoid transferring masses to relativeignorance.
3.2 PCR6
The general idea behind the PCR6 rule is to transferconflicting masses to the non-empty elements that areinvolved in the conflict as opposed to transfer it to relativeignorance, which is the case in hybrid DSmT. The variousPCR rules can be found in [12], and the PCR6 rule, whichwe use, is discussed in [11] and defines the rule for kindependent information sources as equation (3). Thedifferent combination rules given in equations (1-3) areillustrated using example 1, from [13].
kmcPCR6(X)=mcf(X)+LF;.m;(X)2 (3)
;=1
In equation (3) the following is defined:k-l
ITma;(l)(Ya;(I))F. =~ 1=1 with
I ~ k-l
~~ m;(X)+ I mo-; {l)(Yo-; (I))1=1

Example 1Let the frame of discernment be E> ={A, B}. Two experts
have given their opinion as follows: mi (A) = 0.6,
mI(AuB) =0.4, m2(B) =0.4 and m2(AuB) =0.7.
When assuming Shafer's model of exclusiveness the
conflicting mass is mI2! (A n B) =0.18. Using the
different combination rules, Table 1 is obtained.
Table 1 Generalised basic belief assignments of twoexperts and the results of three combination rules.
A B AuB AnB0.6 0 0.4 0
o 0.3 0.7 0
m12! (.) 0.42 0.12 0.28 0.18
DSmH () 0.42 0.12 0.46 0m12 .
PCR6() 0.54 0.18 0.28 0mI2 .
4 Using DSmT in classificationMost classifiers in military applications use classificationtrees, [15] and [16]. The problem with such an approach isthat once the classifier gets stuck on a high level node itcannot classify further, although information is availableto make a decision about a lower node. We thereforepropose to use a more dynamic approach where'branching' is done based on the available information. Orin other words, we define a search space where allpossible objects are represented and the availableinformation bounds the search space. Defining the searchspace like this means that elements in the search space arenot necessarily exclusive, DSmT therefore seems a goodmechanism to apply.
4.1 Classificationmodel
As stated before, getting a good and timely classificationof objects in the environment is essential for manymission-critical systems. Important in decision supportsystems that are to be utilised in this field is thecombination of the terms good and timely. An exactsolution is not as important as getting a suitable solution atthe right time. For classification this means that the fastclassification "helicopter" is preferred over a solution toprovide distinction between an Apache and a Seahawk.Certain hierarchy in the classification space is thereforenecessary, as well as a system that can operate on andswitch between all hierarchical levels. Of course, theinterdependencies between the different levels need to bedefined: all elements on a certain hierarchical level aremapped to one or more elements at the next higherhierarchical level.
Since exclusiveness is not required in DSmT, we canapply it with the PCR6 combination rule for a hierarchicalstructured classification space. For this domain we definethree hierarchy levels: specific, generic and super classes.Belief can be assigned on any of the hierarchical level(s)and the combination mechanism based on DSmT can thencombine beliefs as well as deal with conflicts.The specific classes in the classification domain representthe different types of objects (e.g., an F16 or an Apache).The set of specific classes is defined as C
{BI,B2 , .••,Bn } . This set consists of n exhaustive and
exclusive elements.The set of generic classes, G ={YI'Y2 ,...,Ym}, consists of
m exhaustive and exclusive elements. In this set, objectslike 'fighter' and 'helicopter' are represented. Eachelement of G contains a subset of C.Finally, the set of super classes, S = {a}, a2 , •••, ak } ,
consists of k exhaustive elements. Each element from thisset contains a subset of G. For the classification problemwe consider the union of C, G and S as the frame ofdiscernment ( E> = C u GuS ).
Figure 1 The different domains represented as Venndiagram of S
Within the classification domain for military applicationswe define S using the different domains. This produces setS with five elements defined as the domains: a} air, a2
surface and a3 subsurface. Furthermore, 0"4 and asrepresent the sub-domains land and sea of the surfaceclass respectively. The Venn diagram of these fiveelements is given in Figure 1. Overlaps with the surfacedomain are included since both air and subsurface objectscan operate in the surface domain, e.g. a surfacedsubmarine or low flying helicopter. Example 2 illustrateshow these hierarchical levels are used in the classificationdomain.
Example 2Let C be given by:
°1:
Seahawk; °6 :Apache;
°2 :F-16; °7 :
M-frigate;
°3 :Walrus-class; Os: K-class;
°4 :ADCF; °9 :
F-14;
Os : Leopard II; Ow : Boeing 747.
Let G be given by:Jl : Helicopter;
Y2 : Fighter;
Y3 : Submarine;
Frigate;
Tank;
Airliner.
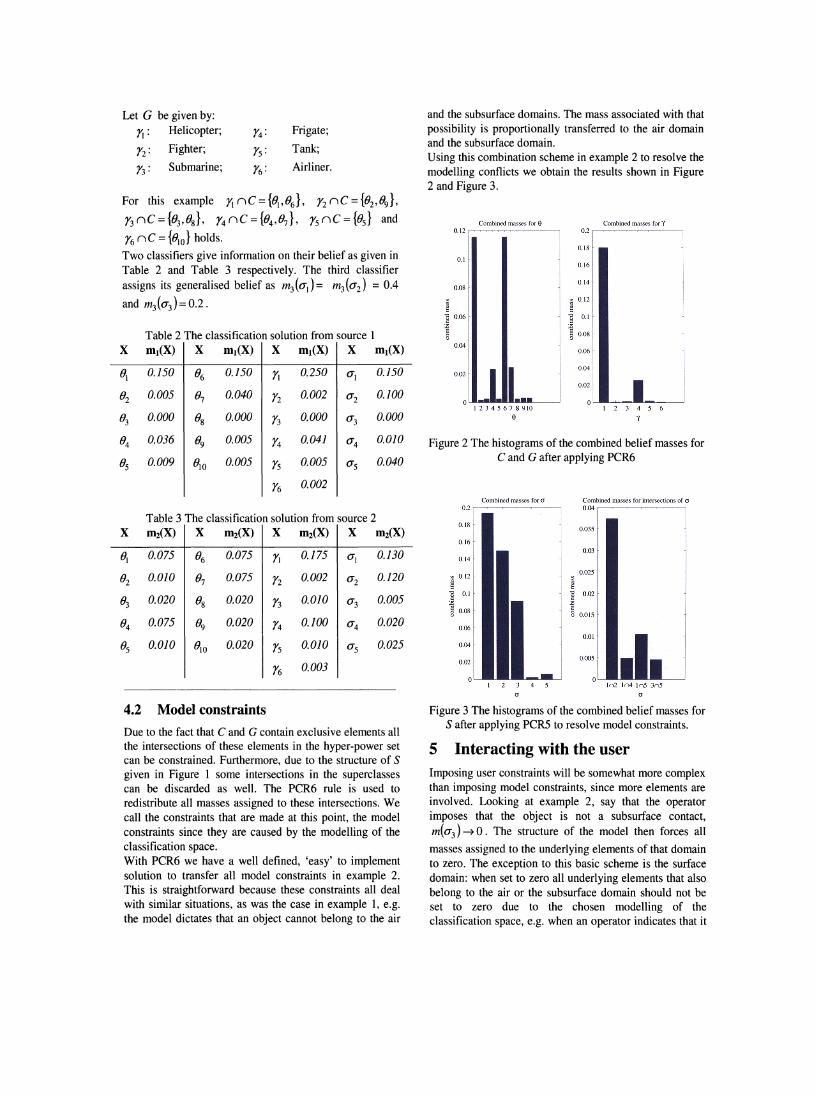
and the subsurface domains. The mass associated with thatpossibility is proportionally transferred to the air domainand the subsurface domain.Using this combination scheme in example 2 to resolve themodelling conflicts we obtain the results shown in Figure2 and Figure 3.
5 Interacting with the user
Figure 3 The histograms of the combined belief masses forS after applying PCR5 to resolve model constraints.
Combined masses for 'Y
1 2 3 4 5 6
'Y
0.04
0.02
0.06
0.14
0.18
0.16
~ 0.12g] 0.1
10.08
Combined masses for e
12345678910
e
0.1
0.02
0.04
0.08
Combined masses for (} Combined masses for intersections of (}0.2 0.04
0.180.035
0.16
0.030.14
0.120.025
~ E] 0.1 ] 0.02.5~ 1~ 0.08
0.Ql5
0.06
0.010.04
0.020.005
I 2 3 4 5 In:! 1n4 InS 3nS
o o
Imposing user constraints will be somewhat more complexthan imposing model constraints, since more elements areinvolved. Looking at example 2, say that the operatorimposes that the object is not a subsurface contact,m(6 3)~ O. The structure of the model then forces all
masses assigned to the underlying elements of that domainto zero. The exception to this basic scheme is the surfacedomain: when set to zero all underlying elements that alsobelong to the air or the subsurface domain should not beset to zero due to the chosen modelling of theclassification space, e.g. when an operator indicates that it
Figure 2 The histograms of the combined belief masses forC and G after applying PCR6
Due to the fact that C and G contain exclusive elements allthe intersections of these elements in the hyper-power setcan be constrained. Furthermore, due to the structure of Sgiven in Figure 1 some intersections in the superclassescan be discarded as well. The PCR6 rule is used toredistribute all masses assigned to these intersections. Wecall the constraints that are made at this point, the modelconstraints since they are caused by the modelling of theclassification space.With PCR6 we have a well defined, 'easy' to implementsolution to transfer all model constraints in example 2.This is straightforward because these constraints all dealwith similar situations, as was the case in example 1, e.g.the model dictates that an object cannot belong to the air
4.2 Model constraints
For this example Yl nC={01,06}' Y2 nC ={02,09}'
Y3 r.C ={03'OS}' Y4 n C ={04,07}' rs r.C ={Os} and
Y6 nC ={01O} holds.
Two classifiers give information on their belief as given inTable 2 and Table 3 respectively. The third classifierassigns its generalised belief as ~ (61) = ~(62) = 0.4
and m3(63)=0.2.
Table 2 The classification solution from source 1X mt(X) X mt(X) X mt(X) X mt(X)
°1 0.150 °6 0.150 Yl 0.250 6 1 0.150
f)2 0.005 f)7 0.040 r2 0.002 6 2 0.100
f)3 0.000 f)s 0.000 Y3 0.000 6 3 0.000
f)4 0.036 f)9 0.005 r4 0.041 6 4 0.010
f)s 0.009 f)1O 0.005 rs 0.005 6 s 0.040
r6 0.002
Table 3 The classification solution from source 2X m2(X) X m2(X) X m2(X) X m2(X)
°1 0.075 °6 0.075 rl 0.175 6 1 0.130
f)2 0.010 °7 0.075 Y2 0.002 6 2 0.120
°3 0.020 Os 0.020 r, 0.010 6 3 0.005
°4 0.075 °9 0.020 r: 0.100 6 4 0.020
Os 0.010 °10 0.020 rs 0.010 6 s 0.025
r6 0.003

is not a surface contact, the low flying helicopter shouldstill be under consideration. Furthermore, the operator hasthe freedom to impose constraints on either C, G or S.
5.1 Transferringuser constraints
Using PCR6 to transfer user constraints means that allconflicts are redistributed to elements involved in theconflict. However, this works when constraints are placedon intersections of two of more elements: the generalisedmasses are then redistributed to the single elements.Where should generalised masses be transferred to whene.g. the user constrains 810 in example 2? A general
approach could be to transfer it to the element at a higherhierarchical level, in this case 1't. This fits the modelling
of the classification space. The belief held on a specificclass will transfer to the more generic class when the firstis contradicted. Now however, the problem occurs whenan element at the highest hierarchical level is constrained:where should that mass be transferred to?
Table 4 Transfers between elements of S.Set to zero Transfers
to
0"1 0"2
0"2 ( 0"4 ' 0"5 ) 0"1 ,0"3
0"3 0"2 ,0"5
0"4 0"2
0"5 0"2 ,0"3
This problem can be solved by proportionally transferringmasses at the highest level in accordance with Table 4,which in turn is based on the overlaps of the differentdomains as can be seen in Figure 1. E.g., when the userindicated that an object does not belong to the air domain,the generalised mass for that domain is transferred to thesurface domain only, since that is the most generic andmost likely other candidate due to the overlaps betweenthe two.Applying this method results in an accumulation ofgeneralised masses at the highest hierarchical level sincethe masses of all underlying elements of the constraintdomain are transferred as well. We therefore propose totransfer the masses of those underlying elements toelements at the same hierarchical level that are children ofthe element that the mass was supposed to go followingTable 4.
5.2 Conflict
Constraining the subsurface domain in example 2 agreeswith the information given by the two other sources, inother words: the operator agrees with the system, as shownin Figure 3. When the user imposes a similar constraint onthe air domain, another problem arises: the system
disagrees with the operator. This conflict can beinterpreted and used in three ways.Firstly, the operator might be wrong. In this case, theconflict can be used as a alert for the operator to reviewthe case. The conclusion can go both ways. If the operatoragrees with the system this is of added training value forthe operator. If the system is wrong, this instance can beused to train the automated classification algorithms.Secondly, the conflict can be used to trigger sensormeasurements. The conflict between system and operatorcan be traced to a single classifier that causes most of theconflict. By looking at the input of that particularclassifier, we can tell which uncertainty of its input shouldbe reduced in order to try and reduce the amount ofconflict. With that information a sensor task can begenerated for the sensor manager.And lastly, when conflict is not resolved by such sensortasks, two other options must be considered: 1) the objectis classified correctly but is behaving very unexpectedly;or 2) a sensor system is degraded and is giving wrongmeasurements. Either way, the amount of conflict is usedto alert the operator should this occur.
6 ImplementationThe theories from the previous sections have beenimplemented as a part of the ongoing research in sensormanagement at CAMS - Force Vision. The simulationenvironment and the scenarios that were developed in theSTATOR project have been expanded with classifiers totest the fusion of system belief and operator input. Notethat the classifiers used are simple ones and will later bereplaced by more intelligent classifiers that e.g. taketemporal aspects into consideration. This section describesthe architecture of the fusion system and the interface forclassification.
Figure 4 Basic system architecture to combineclassification solutions
6.1 System architecture
In section 5.2 we saw that the user and the system interacton several levels. At the highest level, the operator definesthe mission, which influences the parameters of theclassifiers. This level is discarded for now since it is a

component in the Ill1SSI0n planner and not of theclassification system itself. More information on thissubject can be found in [17].Two levels are, left that do need to be implemented.Firstly, the level where the operator constrains the modelfor each individual detected (or expected) object. Thesecond level is the operator classifying objects manually.Making this separation means that two separatecombination rules must be used. The resulting systemarchitecture is shown in Figure 4. Five different (simple)classifiers were implemented that try to classify objectsbased on:
1) speed;2) domain;3) object size;4) altitude; and5) area (for this classifier the mission settings define
where objects are more likely to occur).
This system has two outputs. The first, of course, is thecombined belief that is assigned to the various elements ofthe classification space. The second, the amount ofconflict, is important for feedback purposes, as mentionedin section 5.2. This feedback informs the operator aboutdecisions he makes and on how well this fits into thesystems belief. The amount of conflict can be used as atrigger for the sensor manager.
6.2 Classification Interface
Besides the influence the operator has on the classificationsolution, it is also important for the operator to know whatthe current state of belief is in the system. The resultinginterface, shown in Figure 5, gives the operator inputpossibilities and displays the current belief state of thesystem. In this figure, the colour indicates the amount ofbelief the system has in a certain element on allhierarchical levels. The operator can exclude (sets of)elements, which makes those elements transparent. Theamount of conflict is also tracked. Furthermore, the usercan classify an object by clicking the appropriate element.The system belief is then combined with the operator'ssolution using a DSmT combination rule as shown inFigure 4.In the interface, the amount of conflict is also displayed.The amount of conflict determines the colour in which thenumeric value is displayed, which alerts the operator if itincreases too much. The conflict level is only determinedby the constraints the operator places on the classificationcombination rule. When the operator classifies an objecthimself, the combined value to that class indicates howmuch the system classifiers agree with that solution; thecolour intensity of that particular node also indicates thatvalue as additional information source. This indication canprevent the operator from tunnel vision, i.e. it willemphasize contradicting evidence when the operator doesnot have enough time to notice that.
Figure 5 Screenshot of the interface where the operatorcan view the system belief on the three hierarchical levels.
7 Future WorkIn [3] command and control concepts and sensormanagement concepts were tested in a simulationenvironment. We will implement the classification systemsdiscussed here in that environment. Another addition tothat environment will be the implementation of theautomated classifiers discussed in [17] and the temporalaspects within the classification process.By expanding the implementation of the overall conceptsin more complex scenarios, we will be able to conductserious gaming tests to validate the cooperationmechanisms discussed in this paper.Sensor management is the overall subject of ongoing studyin the Royal Netherlands Navy. Mechanisms to generatesensor task requests based on the reasoning process withuncertainties need also be developed. These requestsshould, of course, fit into the overall sensor managementconcepts. As scheduling mechanism for these functions weexpect to use the results from [18]. The combination willresult in an overall new command and control concept.
8 ConclusionsThis work shows that it is possible to use DSmT tocombine operator and system belief on classificationsolutions. Modelling the classification space to complywith DSmT fits the real life situation in the militarydomain.Operator input is very important in military applications.The interface we presented here enables an operator toexert influence on various levels in a flexible way.Furthermore, the interface gives the operator insight intothe belief state of the system. The result of this insight willgive the operator reason to trust the system, which leads tobetter cooperation.

References[1] H. Gerner, Politiek plot op zee: InformationOperations tijdens de NATO oefening Noble Midas 2007,Marineblad, Vol. 118, No.1, February 2008, pp. 17-21,(in Dutch)
[2] Tanja van Valkenburg- van Haarst, Wilbert vanNorden, Fok Bolderheij, Automatic Sensor Management:challenges and solutions, Proc. of the SPIE Defence andSecurity conference, Optics and Photonics in HomelandSecurity (6945-33), Orlando (FL), March 2008
[3] Fok Bolderheij, Frans Absil, Mission-OrientedSensor Management, Proc. of 1st conference on cognitivesystems with interactive sensors; Paris, March 15-17, 2006
[4] Fok Bolderheij, Frans Absil, Piet van Genderen,Risk-Based Object-Oriented Sensor Management, Proc.8th Int. Conf. on Information Fusion, Philadelphia, (PA),July 25-29 2005
[5] Wilbert van Norden, Intelligent task scheduling insensor networks, Delft University of Technology, Mastersthesis with the Man-Machine Interaction group, April2005
[6] Fok Bolderheij, Piet van Genderen, Mission DrivenSensor Management, Proc. 7th Int. Conf. on InformationFusion, Stockholm, June 28 - July 1 2004, pp. 799-804
[7] Y. Bar-Shalom, T. Kirubarajan, C. Gokberk,Tracking with classification-aided multiframe dataassociation, IEEE Transaction on Aerospace andElectronic Systems, Vol.41, No.3, July 2005, pp. 868-878
[8] F. Smarandache, J. Dezert, An Introduction to theDSm Theory for the Combination of Paradoxical,Uncertain, and Imprecise Sources of Information, Proc.13th International Congress of Cybernetics and Systems,Maribor, July 6-10, 2005,
[9] F. Smarandache, 1. Dezert, Advances andApplications of DSmT for Information Fusion, [Internet].Rehoboth (MA): American Research Press; 2004 [cited2005 May 16], Available from: http://www.gallup.unm.edu/-smarandachelDSmT-book1.pdf
[10] F. Smarandache, 1. Dezert, Advances andApplications of DSmT for Information Fusion (CollectedWorks), Volume 2, [Internet]. Rehoboth (MA): AmericanResearch Press; 2006 [cited 2008 March 18], Availablefrom: http://www.gallup.unm.edu/-smarandacheIDSmTbook2.pdf
[11] A. Martin, C. Osswald, A new generalization of theproportional conflict redistribution rule stable in terms ofdecision, Chapter 2 in Advances and Applications ofDSmT for Information Fusion (Collected Works), Volume2, edited by F. Smarandache and 1. Dezert, AmericanResearch Press, Rehoboth (MA), 2006
[12] F. Smarandache, J. Dezert, Proportional ConflictRedistribution Rules for Information Fusion, Proc. 8th Int.Conf. on Information Fusion, Philadelphia (PA), July 25292005
[13] M. Florea, J. Dezert, P. Valin, A-L. Jousselme, F.Smarandache, Adaptive combination rule andproportional conflict redistribution rule for informationfusion, Proc. of 1st conference on cognitive systems withinteractive sensors; Paris, March 15-17 2006
[14] M. Tombak, A. Isotamm, T. Tamme, On logicalmethod for counting Dedekind numbers, Lect. Notes onComp.Sci., 2138, pp. 424-427, Springer-Verlag, 2001
[15] Bionda Mertens, Reasoning with uncertainty in thesituational awareness of air targets, Delft; 2004. MastersThesis with the Man-Machine Interaction Group of theDelft University of Technology
[16] Krispijn Scholte, Dynamic Bayesian networks forreasoning about noisy target data, Den Helder: RoyalNetherlands Naval College, Research Report for theCombat Systems Department, December 2005
[17] Wilbert van Norden, Fok Bolderheij, CatholijnJonker, Classifi~ation su~port using confidence intervals,Proc. of the 11 International Conference on InformationFusion, Cologne, June 30 - July 3 2008
[18] Jeroen de Jong, Wilbert van Norden, Application ofhybrid metaheuristics in sensor management, AerospaceScience and Technology, Vol. 11, No.4, May 2007, pp.295-302