combining laser scans yong joo kil 1, boris mederos 2, and nina amenta 1 1 department of computer...
Post on 21-Dec-2015
219 views
TRANSCRIPT

Combining Laser ScansCombining Laser Scans
Yong Joo KilYong Joo Kil11, Boris Mederos, Boris Mederos22, and Nina Amenta, and Nina Amenta11
1 1 Department of Computer Science, University of California at DavisDepartment of Computer Science, University of California at Davis22 Instituto Nacional de Matematica Pura e Aplicada - IMPA Instituto Nacional de Matematica Pura e Aplicada - IMPA
IDAV IDAV Institute for Data Analysis and VisualizationInstitute for Data Analysis and VisualizationVisualization and Graphics Research GroupVisualization and Graphics Research Group

2D Super Resolution2D Super Resolution
A Fast Super-Resolution Reconstruction Algorithm, [Michael Elad, Yacov Hel-Or]
Low Resolution Images Super Resolution Image

Surface Super ResolutionSurface Super Resolution
One Raw Scan Super resolved (100 scans) Photo

Improve 3D Acquisition MethodsImprove 3D Acquisition Methods
• Better hardware– Costly
• Multiple scans + software– Refine output of current hardware – Cost effective– Smaller devices

Physical SetupPhysical Setup
xy
z (viewing
direction)
Minolta Vivid 910

3D Super Resolution Pipeline3D Super Resolution Pipeline
Input Scans Global Registration
Super Resolution
Super Registration
Convergence
No
Yes
Smoothing Super Resolution Mesh

Viewing direction axisViewing direction axis
z
x
y

Sample PointsLow Resolution Sample SpacingSample PointsLow Resolution Sample Spacing
WidthOf one Scan

Super Resolution Sample SpacingSuper Resolution Sample Spacing
q
N(q)width/4
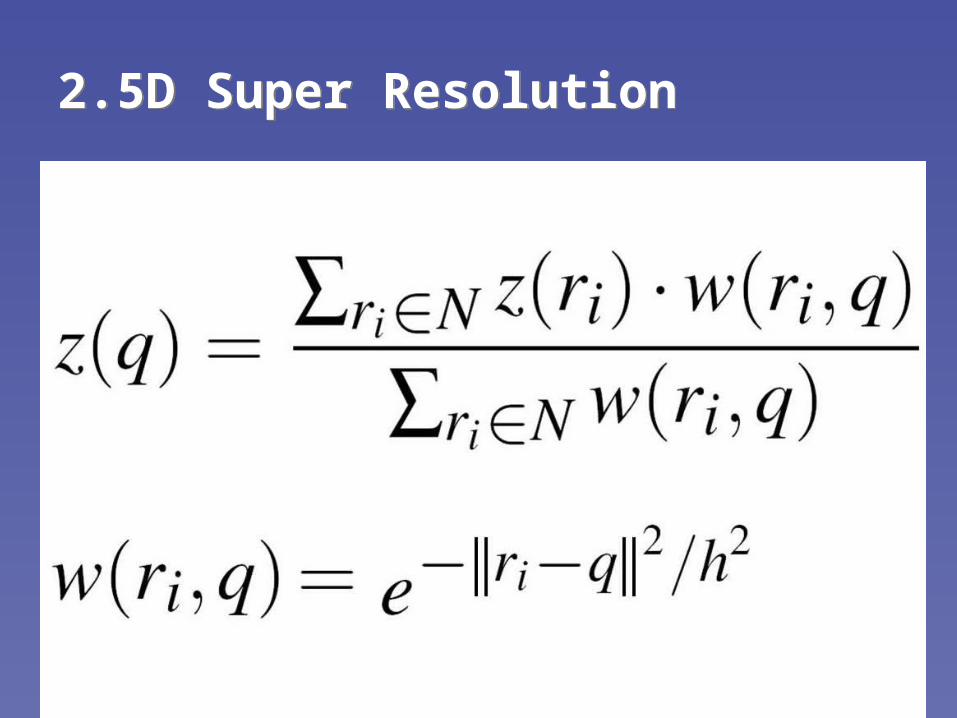
2.5D Super Resolution2.5D Super Resolution
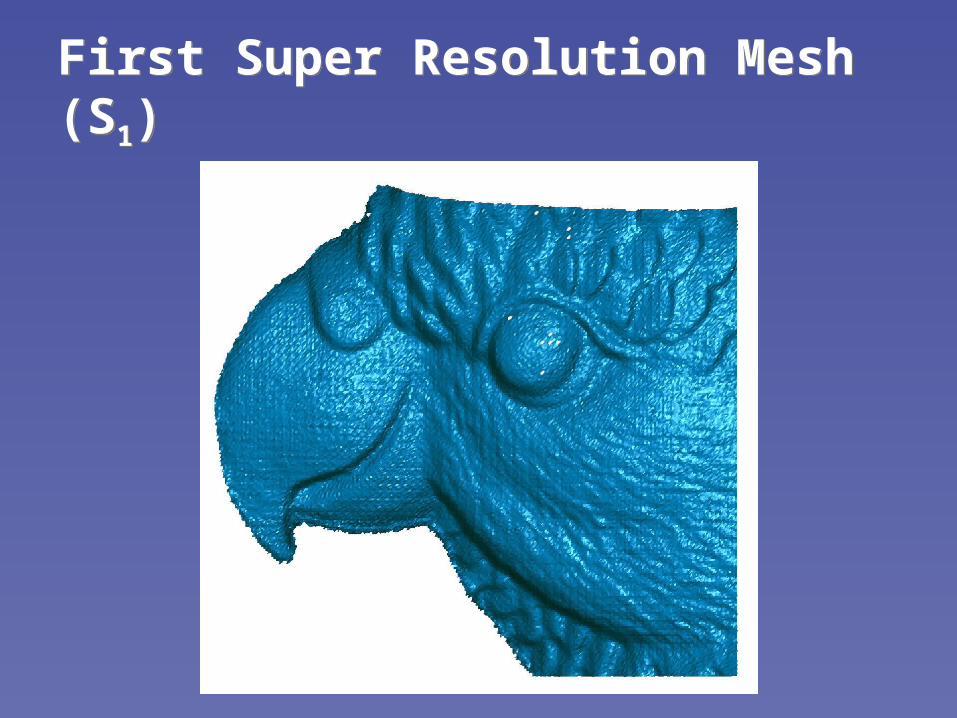
First Super Resolution Mesh (S1)First Super Resolution Mesh (S1)

Super Resolution MethodSuper Resolution Method
Input Scans Global Registration
Super Resolution
Super Registration
Convergence
No
Yes
Smoothing Super Resolution Mesh

Bilateral FilterBilateral Filter

Super Resolution MethodSuper Resolution Method
Input Scans Global Registration
Super Resolution
Super Registration
Convergence
No
Yes
Smoothing Super Resolution Mesh

Super RegistrationSuper Registration
raw scan super resolution mesh

Second Super Resolution Mesh S2Second Super Resolution Mesh S2

Super Resolution MethodSuper Resolution Method
Input Scans Global Registration
Super Resolution
Super Registration
Convergence
No
Yes
Smoothing Super Resolution Mesh

Point Samples (1st Model)Point Samples (1st Model)
Derived from Super-Resolution Reconstruction of Images - Static and Dynamic Paradigms [Michael Elad]
Nyquist Sampling Theorem:Sample signal finely enough, thenReconstruct original signal perfectly.
Band limited signal

Sampling at lower resolutionSampling at lower resolution
Derived from Super-Resolution Reconstruction of Images - Static and Dynamic Paradigms [Michael Elad]
That’s it!

Linear Model with Blur (2nd Model)Linear Model with Blur (2nd Model)
Nkkkkkk EXY 1 FCD
High-ResolutionImage X
Derived from Super-Resolution Reconstruction of Images - Static and Dynamic Paradigms [Michael Elad]
C
Blur
1 D1
Decimation
Low-Resolution
Images
Transformation
F1
Y1E1
Noise
+
CNFN DN
YNEN+
Nkkkkkk EX 1Y FCD
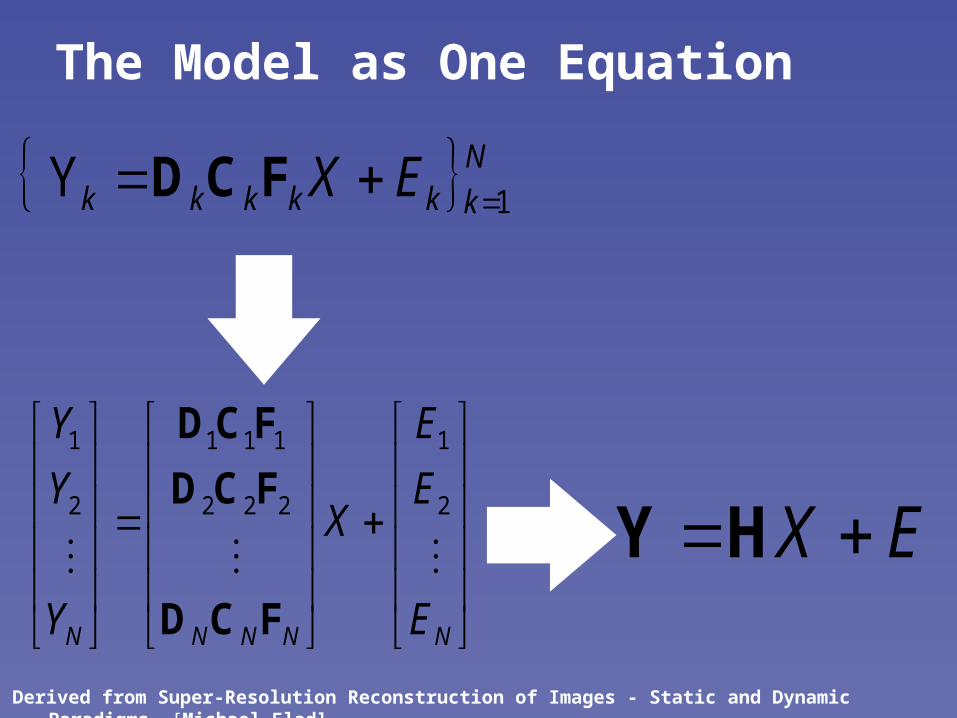
The Model as One Equation
NNNNN E
E
E
X
Y
Y
Y
2
1
222
111
2
1
FCD
FCD
FCD
EX HY
Derived from Super-Resolution Reconstruction of Images - Static and Dynamic Paradigms [Michael Elad]

Model for 3D laser scan? Model for 3D laser scan?

Pipeline : Laser Scanner Pipeline : Laser Scanner
Derived from Better Optical Triangulation through Spacetime Analysis, Curless and Levoy, 1995
laser beam
SurfacePeak reconstructionCCD sensor

Video sequenceVideo sequencex
y
time

Non Linear functionsNon Linear functions
f ( ) =
g ( ) =

SimplificationSimplification
• Assume– Points from Surface– Gaussian Noise

Point Sampling ModelPoint Sampling Model
High-ResolutionImage X
C
Blur
k Dk
Decimation
Low-Resolution
ImagesTransformation
Fk x
[ ELAD M., HEL-OR Y.: A fast super-resolution reconstruction algorithm for pure translational motion and common space invariant blur. IEEE Transactions on Image Processing 10,8 (2001) ]
Solution Average
YkEk
Gaussian Noise
+

SimplificationSimplification
• Solution– Register scans– Averaging
• Easy
• Inexpensive
• It works!

Close-up Scan of ParrotClose-up Scan of Parrot• 146 Scans• 4 times the original resolution.

Super resolve far & close objects?Super resolve far & close objects?
Derived from Better Optical Triangulation through Spacetime Analysis, Curless and Levoy, 1995
SurfaceCCD sensor

Super resolve small & large objects?Super resolve small & large objects?
One raw Scan Super resolution (117 scans)

Is it worth taking more than one scan? Is it worth taking more than one scan?
One raw scan Super resolution PhotographSubdivion of (a)
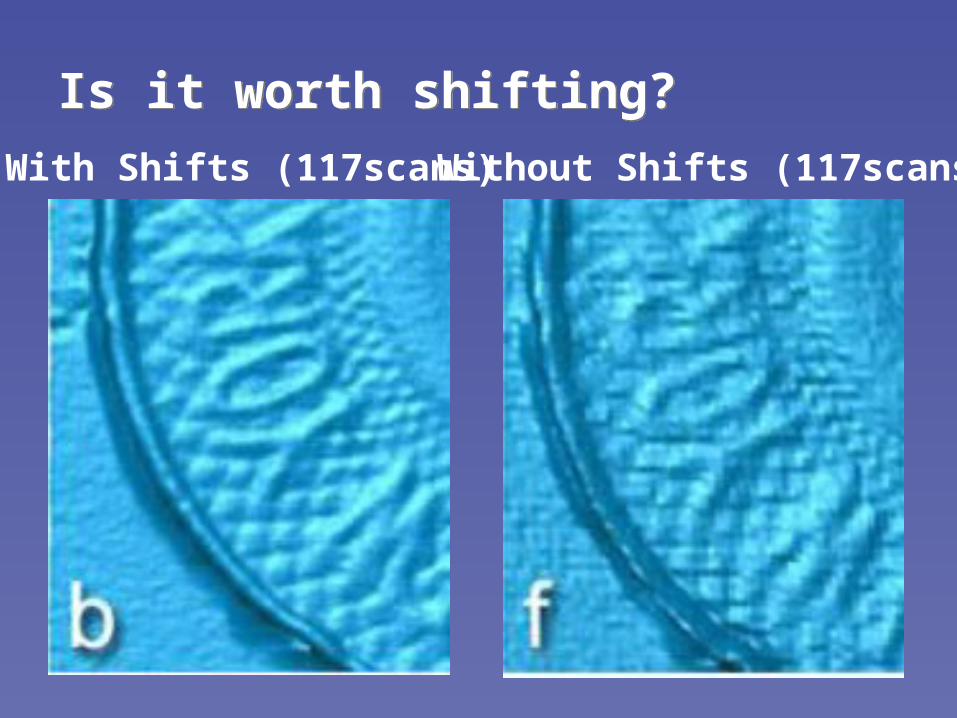
Is it worth shifting?Is it worth shifting?
With Shifts (117scans) Without Shifts (117scans)

How many scans are enough?How many scans are enough?
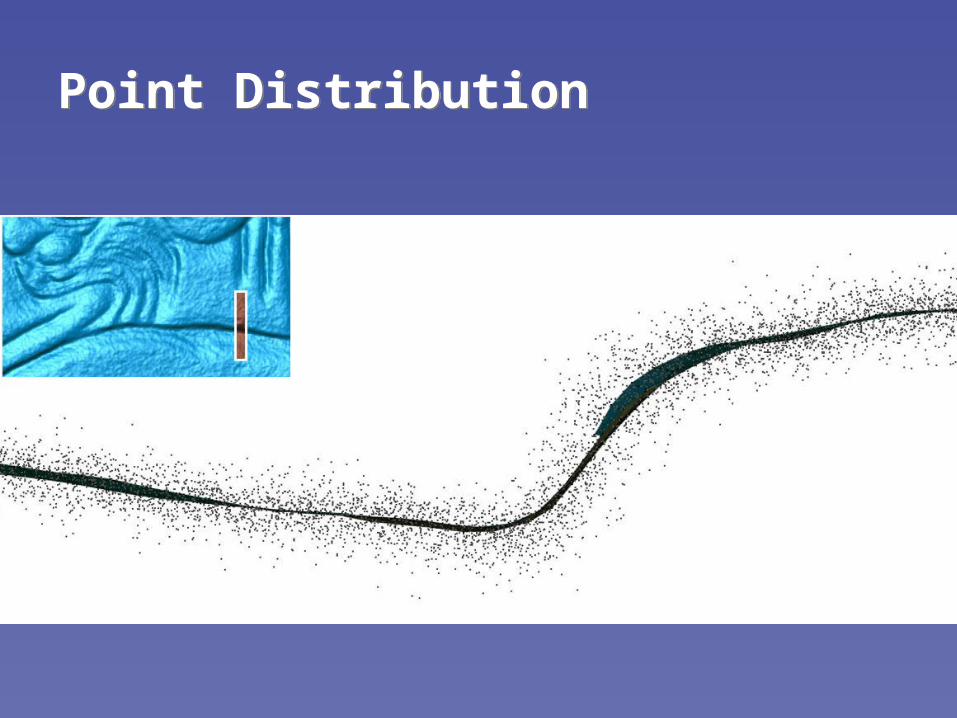
Point DistributionPoint Distribution

Tiling ArtifactTiling Artifact

Sampling PatternSampling Pattern
Random xy shift + Rotation

Mayan Tablet (One Scan)Mayan Tablet (One Scan)

39
Mayan Tablet (90 scans)Mayan Tablet (90 scans)

40
Before & AfterBefore & After

41
Systematic ErrorsSystematic ErrorsSuper resolved Photo

42
Parrot Model (6 views * 100 scans)Parrot Model (6 views * 100 scans)

Future workFuture work
• 2.5D to 3D
• Resolving Systematic Errors
• Other Devices

AcknowledgementsAcknowledgements
• Kelcey Chen
• Geomagic Studios
• NSF CCF-0331736
• Brazilian National Council of Technological and Scientific Development (CNPq)

45
ExtrasExtras

InterpolationsInterpolations

Nyquist frequencyNyquist frequency

48
DataData

g-1( ) =

50
N
k 1kk
tk
tk FDDFR
Solving this linear system is equivalent to an average. [ ELAD M., HEL-OR Y.: A fast super-resolution reconstruction algorithm for pure translational motion and common space invariant blur. IEEE Transactions on Image Processing 10,8 (2001) ]
Solving this linear system is equivalent to an average. [ ELAD M., HEL-OR Y.: A fast super-resolution reconstruction algorithm for pure translational motion and common space invariant blur. IEEE Transactions on Image Processing 10,8 (2001) ]
2
1k ||Y||)( XFDX k
N
kk
kF
PRX
N
k 1k
tk
tk YDFP
Mimize
Diagonal MatrixDiagonal Matrix
Can be a permutation or displacement matrixCan be a permutation or displacement matrix
Equivalent to Equivalent to

51
Error between low res and super res.Error between low res and super res.

52
Error between low res and super res.Error between low res and super res.

53
Registeration resultRegisteration result

54
Before and After RegistrationBefore and After Registration

55
Error between low res and super res.Error between low res and super res.

56
Least Squares Least Squares
)()(2
2XXXX T HYHYHY Minimize:
Solve by:
022
XX
TT HHYH
YHHH TT X , or
Steepest Descent Iteration:
N
kjkk
Tkjj XYXX
11 ]ˆ[ˆˆ HH
kkkk FCDH ,