collimator alignment in high radiation environment
TRANSCRIPT

Collimator alignment in high
radiation environment
Remote controlled
alignment verification system
for LHC collimators at IP7

19/03/2007 Patrick Bestmann TS-SU-ACL
• Introduction
• Metrology
• Initial alignment
• The train concept
• Measurement concept and references
• Sensors and configuration
• Measurement ResultsOve
rvie
w

19/03/2007 Patrick Bestmann TS-SU-ACL
•Minimize the time to spend in the zone
•Failsafe automation of measurements
Be
tatr
on
cle
an
ing
are
aBl indage
Q6L7Q5L7(warm) Q4L7(warm)
240m
Q4R7(warm)Q5R7(warm) Q6R7
Blindage
240m
D4 D3 Q5
TCP TCS

19/03/2007 Patrick Bestmann TS-SU-ACL
Co
llim
ato
r m
etr
olo
gy
•Alignment of Collimator
w.r.t. plug in support
•Alignment of fiducials
w.r.t. Collimator
coordinate system
All collimators are at
the same position w.r.t.
the plug in
All collimators have
equal parameters for
the fiducials.

19/03/2007 Patrick Bestmann TS-SU-ACL
Initia
l a
lign
me
nt
Ref. Ref.TCP
streched wire
•2D alignment using
TDA5005
•Vertical alignment using
digital level
•Smooting with neighbour magnets using wire
offsets

19/03/2007 Patrick Bestmann TS-SU-ACL
Furt
her
alig
nm
ent and c
ontr
ols
•The concerned zones are considered to be the
most radioactive in the LHC
•The time to spend in these zones has to be
minimized
Remote controlled alignment check

19/03/2007 Patrick Bestmann TS-SU-ACL
Tra
in c
on
ce
pt
Ref. Ref.TCP
Monorail
streched wire
•Train attached to the monorail (collaboration with
TS-IC-IS)
•Wire offset measurments to determine the
transversal train position
•Digital photogrammetry to link the position of the
train and the collimators / reference magnets

19/03/2007 Patrick Bestmann TS-SU-ACL
Tra
in c
on
ce
pt
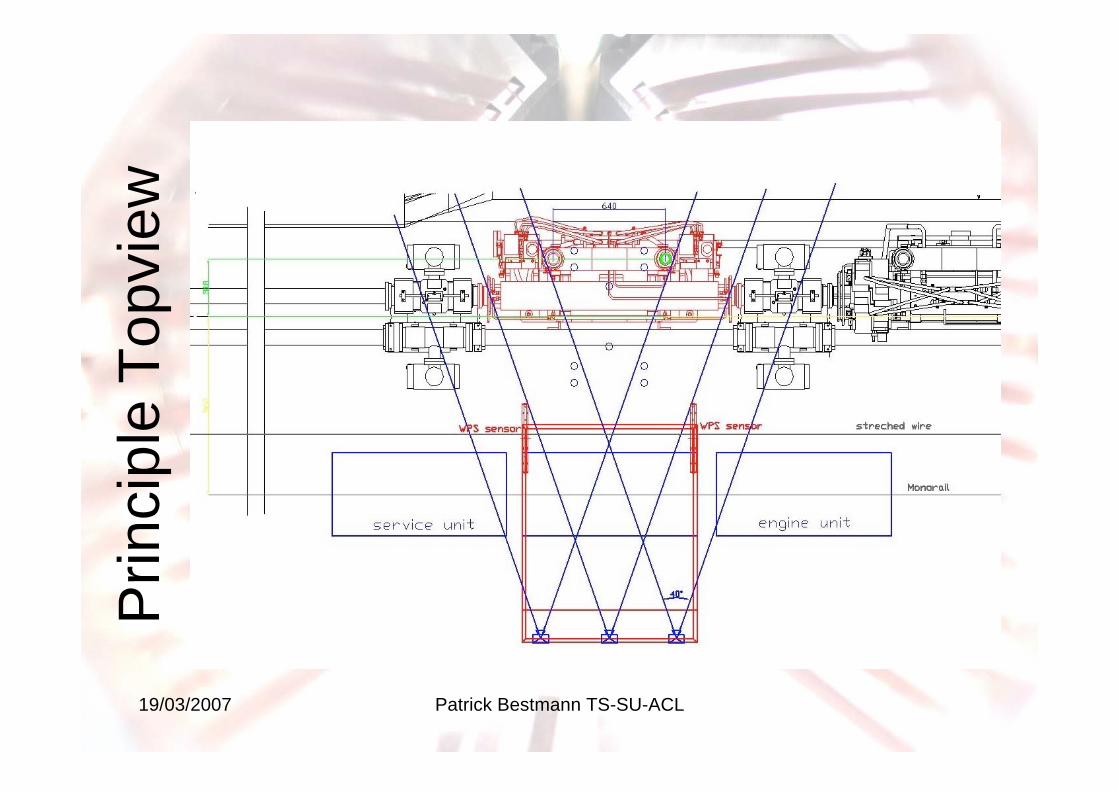
Engine unit
Service unit
Sensor unit

19/03/2007 Patrick Bestmann TS-SU-ACL
Reference
Magnet
Collimator
Monorail
streched wire
•Measurement of the wire position w.r.t. the
reference magnets
•Measurement of the different collimators w.r.t. the
wire
Tra
in c
on
ce
pt

19/03/2007 Patrick Bestmann TS-SU-ACL
Pri
ncip
le c
rosse
ctio
n
19/03/2007 Patrick Bestmann TS-SU-ACL
Pri
ncip
le T
op
vie
w

19/03/2007 Patrick Bestmann TS-SU-ACL
• Normal retroreflecting targets are optimized
for contrast and visibility and not radiation
hard
• Aluminium targets have to be produced in
order to resist under radiation (prototypes
ready)
• 5 targets/collimator are needed to represent
the position and orientation of the collimators
Ph
oto
gra
mm
etr
y T
arg
tes

19/03/2007 Patrick Bestmann TS-SU-ACL
• Fiducials are adjusted to nominal coordinates
• Additional targets will be attached to fiducials
Ph
oto
gra
mm
etr
y T
arg
tes fiducials

19/03/2007 Patrick Bestmann TS-SU-ACL
Ph
oto
gra
mm
etr
y• 3 to 4 cameras will deliver synchronized images of the
collimator targets
• Using these images the system can calculate 3D coordinatesof the collimators in the train coordinate system usingtriangulation
• But where is the train?

19/03/2007 Patrick Bestmann TS-SU-ACL
streched wire
photo-
targets
Wir
e s
en
so
r• The train will get its position from the
streched wire
• The wire sensors are two additional objects
to be measured in the same images.
• Self calibrating system as the sensors are
measured in each image

19/03/2007 Patrick Bestmann TS-SU-ACL
Wir
e s
en
so
r• Online displacement of the wire sensors to
compensate Monorail defaults and train
movements

19/03/2007 Patrick Bestmann TS-SU-ACL
• Transversal position of the collimator
targets and reference magnets w.r.t.
the wire.
• The rotation around the wire will be
measured using electronic inclination
sensors
• The longitudinal position will be
measured relative to the reference
magnet using a laser distometerRe
ca
pitu
latio
n
19/03/2007 Patrick Bestmann TS-SU-ACL
Sch
ed
ule
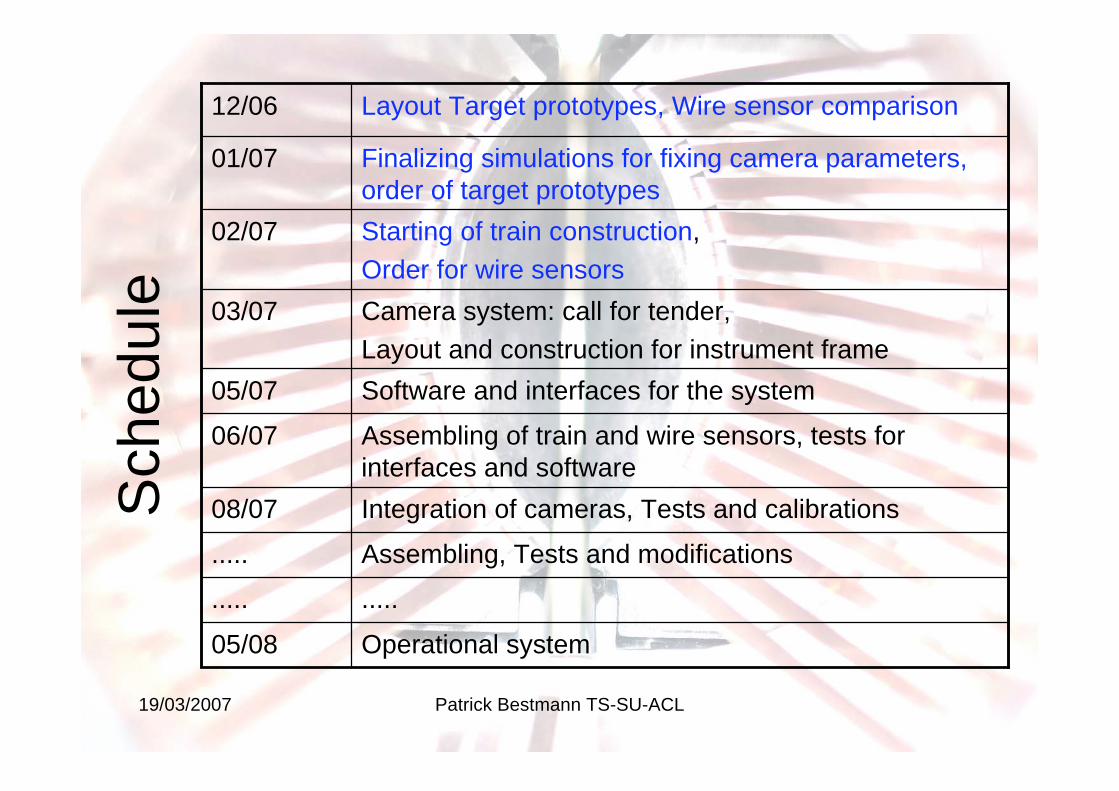
Operational system05/08
Assembling, Tests and modifications.....
..........
Integration of cameras, Tests and calibrations08/07
Assembling of train and wire sensors, tests for
interfaces and software
06/07
Software and interfaces for the system05/07
Camera system: call for tender,
Layout and construction for instrument frame
03/07
Starting of train construction,
Order for wire sensors
02/07
Finalizing simulations for fixing camera parameters,
order of target prototypes
01/07
Layout Target prototypes, Wire sensor comparison12/06