closest pair of points computational geometry, ws 2006/07 lecture 9, part ii prof. dr. thomas...
Post on 21-Dec-2015
214 views
TRANSCRIPT
Closest Pair of Points
Computational Geometry, WS 2006/07Lecture 9, Part II
Prof. Dr. Thomas OttmannKhaireel A. Mohamed
Algorithmen & Datenstrukturen, Institut für InformatikFakultät für Angewandte WissenschaftenAlbert-Ludwigs-Universität Freiburg

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 2
Overview
• Motivation• Closest Pair algorithms
– Improving the naïve runtime– Divide and Conquer– Scan Line
• Analyses

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 3
Geometry and Air Traffic Control
» Avoid collisions at all costs.» Start by finding the two aeroplanes closest to each other, at specific elevations.
» During peak times over 5000 planes, per hour, around Frankfurt airspace.

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 4
Geometry and Astronomy
» Find the two nearest objects in space.

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 5
Search Quickly… and Why?
» Find the two nearest objects in space.

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 6
Problem Description
• Input: A set S of n points in the plane.• Output: The pair of points with the shortest Euclidean distance
between them.
• Other applications in fundamental geometric primitive:– Graphics, computer vision, geographic information systems, molecular
modeling
– Special case of nearest neighbour, Euclidean MST, Voronoi

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 7
Closest Pair of Points
• Naïve method: Brute force.– Check all pair of points p and q with Θ(n2) comparisons.
• 1D version– Simple if all points are on a single line.
– Run time O(n log n)
Key to reducing quadratic runtime of the naïve method:
Simply don´t visit each point n times.

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 8
Algorithm: DAC – Divide
• Sort S in ascending order of x-coordinates.
• Find the median line L, so that we have ½ n points in SL and ½ n points SR.
SL SR
Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 9
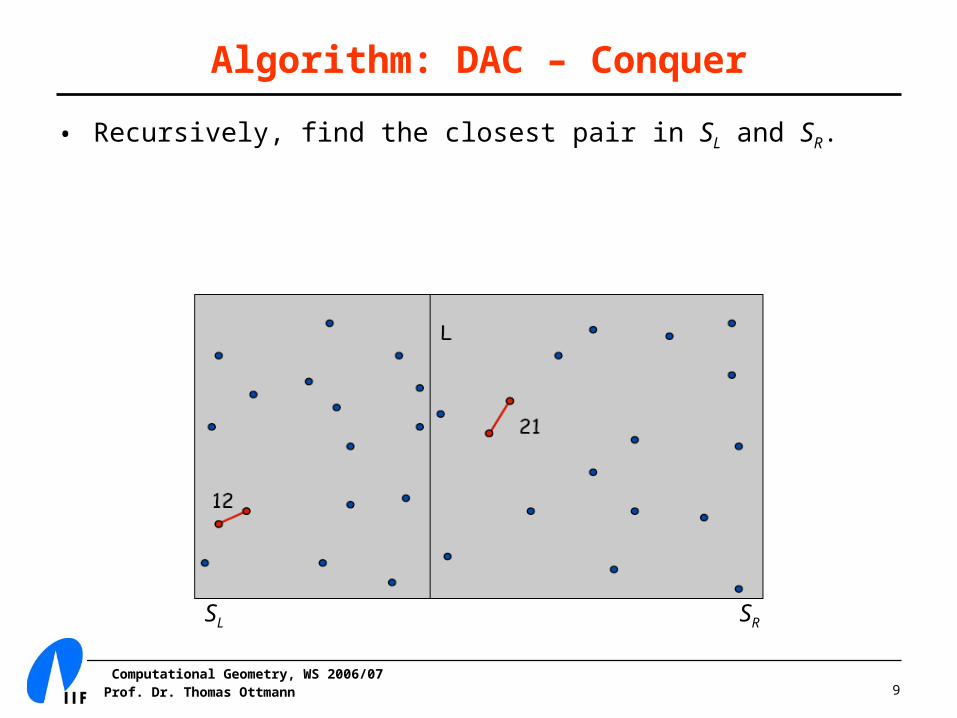
Algorithm: DAC – Conquer
• Recursively, find the closest pair in SL and SR.
SL SR
Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 10
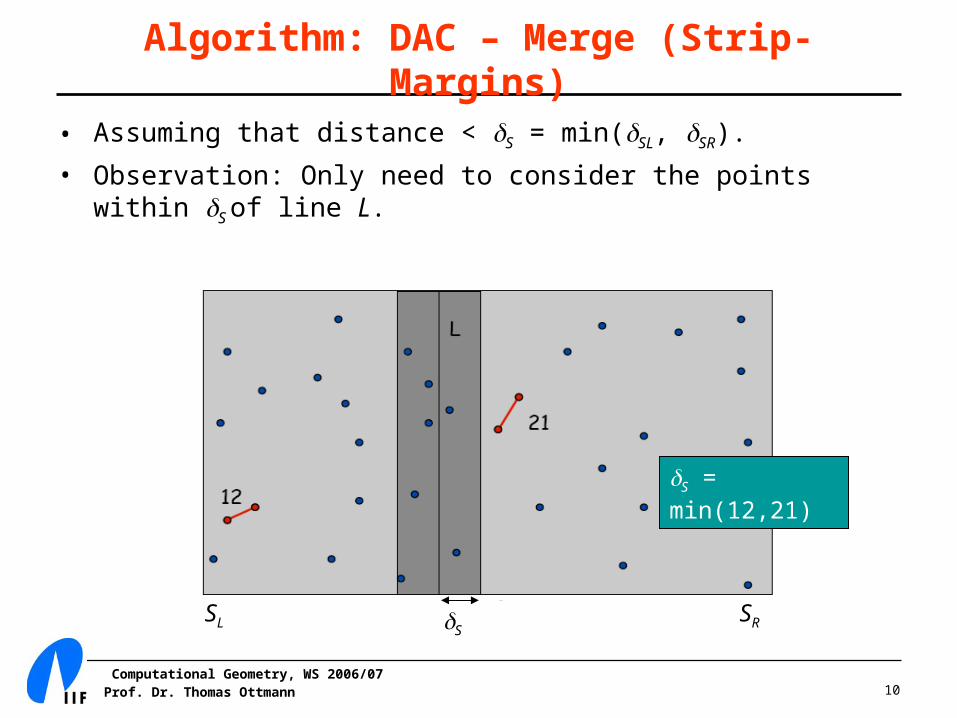
Algorithm: DAC – Merge (Strip-Margins)
• Assuming that distance < S = min(SL, SR).
• Observation: Only need to consider the points within S of line L.
SL SRS
S = min(12,21)

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 11
Handling Merge
• Sort points in 2S-strip in ascending y-coordinate order.
• (First observation) Only check those points within 11 positions in sorted list.
SL SRS
S = min(12,21)

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 12
Comparing Efficiently
Definition: Let si be the point in the 2S-strip with the ith smallest coordinate.
Claim: If |i - j| 12, then the distance between si and sj is at least S.
Proof:
• The points si and sj cannot lie in same ½ S-by- ½ S box.
• si and sj are at least 2 rows apart, and have distance 2(½ S).
Fact:
• The above still holds if we replace 12 with 7.SS

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 13
Closest Pair: DAC Algorithm
Algorithm: Closest-Pair( S = {p1, …, pn} )Sort all n points in ascending x-coordinate order
Compute the median line L, and divide S into SL and SR
Set SL Closest-Pair(SL)
Set SR Closest-Pair(SR)
Set S min(SL,SR)
Delete all points further than S from separation line L
Sort remaining points in ascending y-coordinate order
Scan points in y-order and compare distance between each point and next 7 neighbours. Update S if new shorter distance is found.
Return S

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 14
Closest Pair: DAC Analysis
Run time:T(N) 2T(N/2) + O(N log N) T(N) = O(N log2 N)
Can we achieve a better run time?Yes. Don’t sort points in strip from scratch each time.• Each recursive step returns two lists: all points sorted by y-
coordinate, and all points sorted by x-coordinate.• Sort by merging two pre-sorted list.
T(N) 2T(N/2) + O(N) T(N) = O(N log N)
Space:O(n)
Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 15
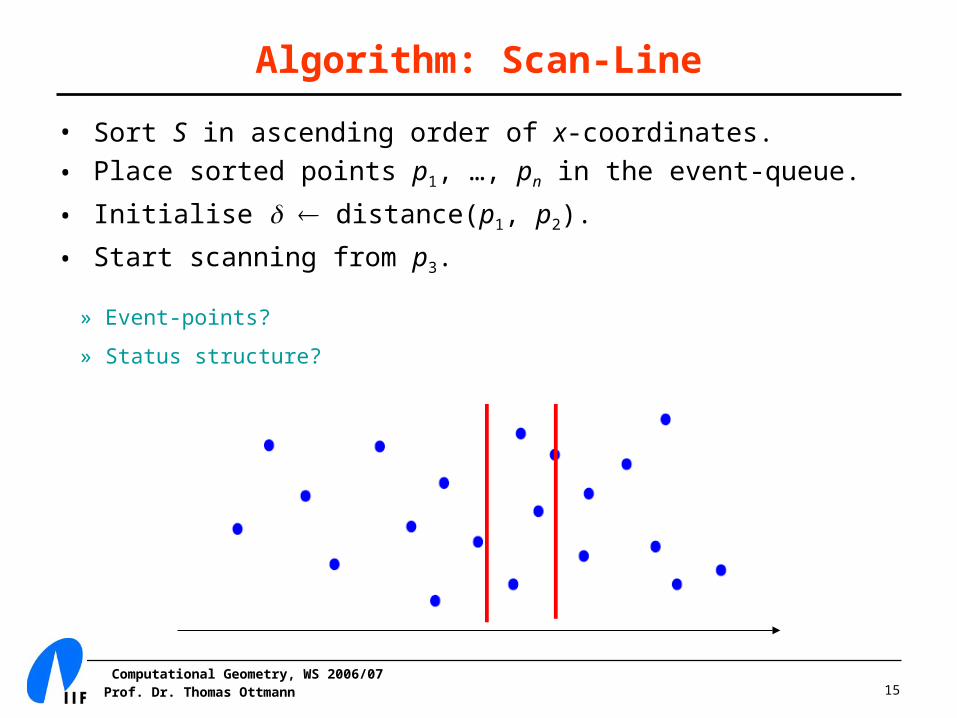
Algorithm: Scan-Line
• Sort S in ascending order of x-coordinates.
• Place sorted points p1, …, pn in the event-queue.
• Initialise distance(p1, p2).
• Start scanning from p3.
» Event-points?
» Status structure?

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 16
The Status-Structure
• Maintain the status-structure (-slab): – Insert the new event-point pi.
– Remove all points that are greater than distance to the left of the current event-point pi.
– All points in the status structure are maintained in ascending y-coordinate order.

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 17
The Status-Structure
• Maintain the status-structure (-slab): – Insert the new event-point pi.
– Remove all points that are greater than distance to the left of the current event-point pi.
– All points in the status structure are maintained in ascending y-coordinate order.
– Perform the ‘Efficient Comparison’, as described earlier, BUT only between the new event point pi and at most 7 other nearest points to pi.
– Update if a shorter distance is found.

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 18
Closest Pair: Scan-Line Analysis
Invariant:
Whenever an event-point pi has been handled, then is the minimum distance between any pair of points encountered from p1 up to pi.
Run time:
O(n log n)
Space:
O(n)

Computational Geometry, WS 2006/07Prof. Dr. Thomas Ottmann 19
Related Problems
• Nearest neighbour query:– Given a set S of n points, and a query point q,
determine which s S is closest to q.
– Brute force: O(n)
– Goal: O(n log n) pre-processing, O(log n) per query.
• Voronoi region, VR(S): – A set of points closest to a given point.
• Voronoi diagram, VD(S):– Planar subdivision deliniating Voronoi regions.
• Delaunay Triangulation (the dual of VD(S)).