chapter 7 finite impulse response(fir) filter design
TRANSCRIPT

Chapter 7Chapter 7 Finite Impulse Response(FIR) Finite Impulse Response(FIR)
Filter DesignFilter Design
2/74
Characteristic of FIR filter
– FIR filter is always stable
– FIR filter can have an exactly linear phase response
– FIR filter are very simple to implement. Nonrecursive FIR filters suffer less from the effect of finite wordlength than IIR filters
1. Features of FIR filter1. Features of FIR filter
0
( ) ( ) ( )N
k
y n h k x n k
0
( ) ( )N
k
k
H z h k z

3/74
Phase response of FIR filter
– Phase delay and group delay
2. Linear phase response2. Linear phase response
0
( )
( ) ( )
= ( )
Nj T j kT
k
j T j
H e h k e
H e e
where ( ) arg ( )j TH e
p g( )
p
( )g
d
d
(1)
(2)

4/74
– Condition of linear phase response
( )
( )
Where and is constant Constant group delay and phase delay response
(3)
(4)

5/74
• If a filter satisfies the condition given in equation (3)
– From equation (1) and (2)
1 0
0
( )
( )sin = tan
( )cos
N
nN
n
h n nT
h n nT
thus
0
0
( )sintan =
( ) cos
N
nN
n
h n nT
h n nT

6/74
– It is represented in Fig 7.1 (a),(b)
0
( ) cos sin sin cos 0N
n
h n nT nT
0
( )sin( ) 0N
n
h n nT
( ) ( 1), 0h n h N n n N
/ 2NT

7/74
• When the condition given in equation (4) only
– The filter will have a constant group delay only
– It is represented in Fig 7.1 (c),(d)
( ) ( )h n h N n
/ 2NT
/ 2

8/74
Center of symmetry
Fig. 7-1.

9/74
Table 7.1 A summary of the key point about the four types of linear phase FIR filters

10/74
Example 7-1(1) Symmetric impulse response for linear phase response.
No phase distortion
(2)
( ) ( ) or ( ) ( )h n h N n h n h N n
( ) ( ), 0 , 10h n h N n n N N
(0) (10)
(1) (9)
(2) (8)
(3) (7)
(4) (6)
h h
h h
h h
h h
h h

11/74
• Frequency response ( )H
10
0
2 3 4 5
6 7 8 9 10
5
( ) ( )
= ( )
= (0) (1) (2) (3) (4) (5)
+ (6) (7) (8) (9) (10)
= [ (0)
j T
jk T
k
j T j T j T j T j T
j T j T j T j T j T
j T
H H e
h k e
h h e h e h e h e h e
h e h e h e h e h e
e h
5 4 3 2
2 3 4 5
(1) (2) (3) (4) (5)
+ (6) (7) (8) (9) (10) ]
j T j T j T j T j T
j T j T j T j T j T
e h e h e h e h e h
h e h e h e h e h e
5 5 5 4 4 3 3
2 2
5
( )= [ (0)( ) (1)( ) (2)( )
(3)( ) (4)( ) (5)]
[2 (0)cos(5 ) 2 (1)cos(4 ) 2 (2)cos(3 )
2 (3)c
j T j T j T j T j T j T j T
j T j T j T j T
j T
H e h e e h e e h e e
h e e h e e h
e h T h T h T
h
os(2 ) 2 (4)cos( ) (5)]T h T h 5
5 ( )
0
( )= ( )cos( ) ( )j T j
k
H a k k T e H e
where 5
0
( ) = ( )cos( )k
H a k k T
( ) 5 T

12/74
(3) 9N (0) (9)
(1) (8)
(2) (7)
(3) (6)
(4) (5)
h h
h h
h h
h h
h h
9 /2 9 9 7 7 5 3
3 3
9 /2
( )= [ (0)( ) (1)( ) (2)( )
(3)( ) (4)( )]
[2 (0)cos(9 / 2) 2 (1)cos(7 / 2) 2 (2)cos(5 / 2)
2
j T j T j T j T j T j T j T
j T j T j T j T
j T
H e h e e h e e h e e
h e e h e e
e h T h T h T
( )
(3)cos(3 / 2) 2 (4)cos( / 2)]
= ( ) j
h T h T
H e
5
1
( )= ( )cos[ ( 1/ 2) ]k
H b k k T
where
( ) (9 / 2) T 1 1
( ) 2 ( ), 1, 2, ,2 2
N Nb k h k k

13/74
Transfer function for FIR filter
3. Zero distribution of FIR filters3. Zero distribution of FIR filters
0
( ) ( )N
k
k
H z h k z
0
0
1
( ) ( )
= ( )
= ( )
Nk
k
k N
k N
N
H z h N k z
h k z z
z H z

14/74
Four types of linear phase FIR filters– have zero at ( )H z 0z z
0jz re
1 10
jz r e
is real and is imaginary( )h n 0z*
0jz re
* 1 10( ) jz r e
1 1 1 1 1 1(1 )(1 )(1 )(1 )j j j jre z re z r e z r e z

15/74
– If zero on unit circle
– If zero not exist on the unit circle
– If zeros on
1, 1/ 1r r
0jz e
1 *0 0
jz e z
1 1(1 )(1 )j je z e z
1 1 1(1 )(1 )rz r z
1z 1(1 )z

16/74
Necessary zero
Necessary zero
Necessary zero
Necessary zero
Fig. 7-2.

17/74
Filter specifications
4. FIR filter specifications4. FIR filter specifications
peak passband deviation (or ripples)
stopband deviation
passband edge frequency
stopband edge frequency
sampling frequency
p
r
p
r
s

18/74
ILPF
Satisfies spec’s
Fig. 7-3.

19/74
Characterization of FIR filter
– Most commonly methods for obtaining • Window, optimal and frequency sampling methods
0
( ) ( ) ( )N
k
y n h k x n k
0
( ) ( )N
k
k
H z h k z
( )h k

20/74
FIR filter– Frequency response of filter
– Corresponding impulse response
– Ideal lowpass response
5. Window method5. Window method
( )IH
( )Ih n
1( ) ( )
2j n
I Ih n H e d
1 1( ) 1
2 22 sin( )
, 0, - =
2 , 0
c
c
j n j nI
c c
c
c
h n e d e d
f nn n
n
f n

21/74
Fig. 7-4.

22/74
Truncation to FIR
– Rectangular Window
( ) ( ) ( ) "windowing"Ih n h n w n
12
( )12
) ) )
) )
j j jI
j jI
H(e H (e W(e
H (e W(e d
1 , 0,1,...,( )
0 ,
n Nw n
elsewhere

23/74
Fig. 7-5.

24/74
Fig. 7-6.

25/74
Fig. 7-7.

26/74
Table 7.2 summary of ideal impulse responses for standard frequency selective filters
and are the normalized passband or stopband edge frequencies; N is the length of filter
1, cf f2 f
( )Ih n
( )Ih n
( )Ih n

27/74
Common window function types– Hamming window
0.54 0.46cos 2 / , 0
0 ,
n N n Nw n
elsewhere
3.32 /F N
where N is filter length and
is normalized transition widthF

28/74
– Characteristics of common window functions
Fig. 7-8.

29/74
Table 7.3 summary of important features of common window functions
30/74
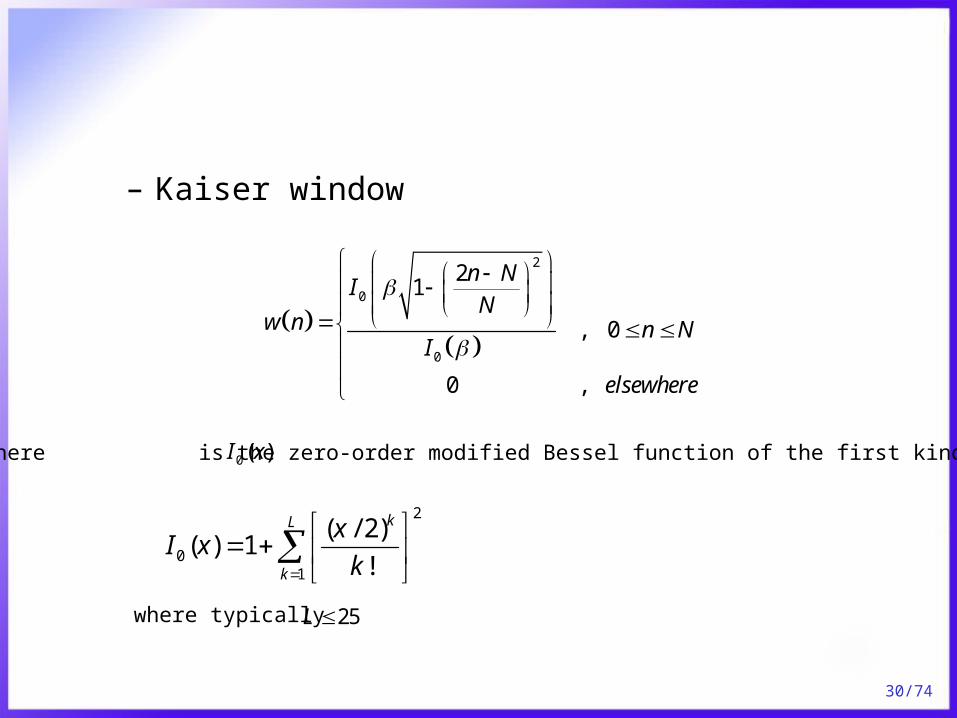
– Kaiser window
2
0
0
21
, 0
0 ,
n NI
Nw n n N
I
elsewhere
2
01
( / 2)( ) 1
!
kL
k
xI x
k
where typically
where is the zero-order modified Bessel function of the first kind0 ( )I x
25L

31/74
• Kaiser Formulas – for LPF design
10
0.4
20log ( )
min( , )
0, if 21dB
0.5842( 21) 0.07886( 21), if 21dB 50dB
0.1102( 8.7) if
p s
A
A
A A A
A A
50dB
7.95
14.36
AN
F

32/74
Example 7-2– Obtain coefficients of FIR lowpass using hamming
window
• Lowpass filter
Passband cutoff frequency
Transition width
Stopband attenuation
Sampling frequency
: 1.5pf kHz
: 0.5f kHz
: 8sf kHz
50dB
sin
2 , 0
2 , 0
cc
I c
c
nf n
h n n
f n
/ 0.5 / 8 0.0625sF f f
3.32 / 3.32 / 0.0625 53.12N F
54N

33/74
• Using Hamming window
( ) ( ) ( )Ih n h n w n 0 54n
( ) 0.54 0.46cos(2 / 54)w n n 0 54n ' / 2 (1.5 0.25) 1.75[ ]c pf f f kHz
' / 1.75 / 8 0.21875c c sf f f
2 sin ( )2
, , 02( ) ( )
2
2 ,2
c c
I c
c
Nf n
Nn n N
Nh n n
Nf n

34/74
2 0.218750 : (0) sin( 27 2 0.21875)
27 2 0.218750.00655
(0) 0.54 0.46cos(0) 0.08
(0) (0) (0) 0.00052398
I
I
n h
w
h h w
2 0.218751 : (1) sin( 26 2 0.21875)
26 2 0.218750.011311
(1) 0.54 0.46cos(2 / 54)
0.08311
(1) (1) (1) 0.00094054
I
I
n h
w
h h w

35/74
2 0.218752 : (2) sin( 25 2 0.21875)
25 2 0.218750.00248397
(2) 0.54 0.46cos(2 2 / 54)
0.092399
(2) (2) (2) 0.000229516
2 0.2187526 : (26) sin( 1 2 0.21875)
1 2 0.218750.312936
I
I
I
n h
w
h h w
n h

36/74
(26) 0.54 0.46cos(2 26 / 54)
0.9968896
(26) (26) (26) 0.3112226I
w
h h w
27 : (27) 2 2 0.21875
0.4375
(27) 0.54 0.46cos(2 27 / 54)
1
(27) (27) (27) 0.4375
I c
I
n h f
w
h h w

37/74
Fig. 7-9.

38/74
Example 7-3– Obtain coefficients using Kaiser or Blackman window
Passband cutoff frequency
Transition region
Sampling frequency
: 1200pf Hz
: 500f Hz
: 10sf kHz
Stopband attenuation : 40dB
passband attenuation : 0.01dB
20log(1 ) 0.01 , 0.00115p pdB
20log( ) 40 , 0.01r rdB
0.00115r p

39/74
• Using Kaiser window
7.95 58.8 7.9570.82
14.36 14.36(500 /10000)
AN
F
71N
0.1102(58.8 8.7) 5.52 ' / 1, 450 /10,000 0.145c c sf f f
2 sin2
( ) , 0
2
c c
I
c
Nf n
h n n NN
n

40/74
( ) ( ) ( )Ih n h n w n
2 0.1450 : (0) sin( 35.5 2 0.145)
35.5 2 0.145
0.00717
In h
2
0
0
0 0
21
(0)(0) 0.023
( ) (5.52)
n NI
N Iw
I I
(0) (0) (0) 0.000164935Ih h w
41/74
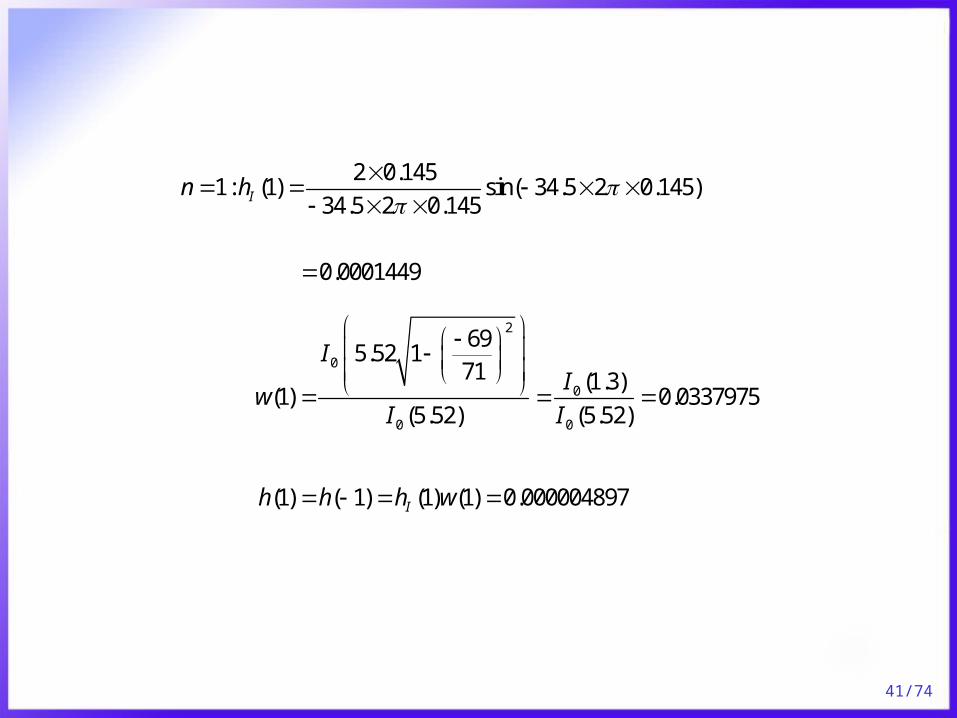
2 0.1451: (1) sin( 34.5 2 0.145)
34.5 2 0.145
0.0001449
In h
2
0
0
0 0
695.52 1
71 (1.3)(1) 0.0337975
(5.52) (5.52)
II
wI I
(1) ( 1) (1) (1) 0.000004897Ih h h w

42/74
2 0.1452 : (2) sin( 34.5 2 0.145)
33.5 2 0.145
0.007415484
In h
2
0
0
0 0
695.52 1
71 (1.8266)(2) 0.04657999
(5.52) (5.52)
II
wI I
(2) ( 2) (2) (2) 0.000345413Ih h h w

43/74
2 0.14535 : (35) sin( 0.5 2 0.145)
0.5 2 0.145
0.280073974
In h
2
0
0
0 0
15.52 1
71 (5.51945)(35) 0.999503146
(5.52) (5.52)
II
wI I
(35) ( 35) (35) (35) 0.279934818Ih h h w

44/74
Fig. 7-10.

45/74
Summary of window method1. Specify the ‘ideal’ or desired frequency response of filter,
2. Obtain the impulse response, , of the desired filter by
evaluating the inverse Fourier transform
3. Select a window function that satisfies the passband or
attenuation specifications and then determine the number of filter coefficients
4. Obtain values of for the chosen window function and the values of the actual FIR coefficients, , by multiplying
by
( )IH
( )Ih n
( )h n
( )w n
( )w n
( )Ih n( ) ( ) ( )Ih n h n w n

46/74
Advantages and disadvantages– Simplicity
– Lack of flexibility
– The passband and stopband edge frequencies cannot be precisely specified
– For a given window(except the Kaiser), the maximum ripple amplitude in filter response is fixed regardless of how large we make N

47/74
Basic concepts– Equiripple passband and stopband
• For linear phase lowpass filters– m+1 or m+2 extrema(minima and maxima)
6. The optimal method6. The optimal method
( ) ( )[ ( ) ( )]IE W H H
min[max ( ) ]E
where m=(N+1)/2 (for type1 filters) or m =N/2 (for type2 filters)
Weighted
Approx. error
Weighting
functionIdeal desired
response
Practical
response

48/74
Ideal response
Practical response
Fig. 7-11.

49/74
Fig. 7-12.

50/74
– Optimal method involves the following steps• Use the Remez exchange algorithm to find the optimum set of
extremal frequencies
• Determine the frequency response using the extremal frequencies
• Obtain the impulse response coefficients

51/74
Optimal FIR filer design
0
( ) ( )N
k
k
H z h k z
where ( ) ( )h n h n
/2 /2
1 0
( ) (0) 2 ( )cos ( )cosN N
k k
H h h k k T a k k T
where and , (0) (0)a h ( ) 2 ( )a k h k 1,2, , / 2k N
Let / 2 / 2sf f T
1
1 , 0
0 , 0.5p
r
f fH f
f f
1
, 0
1 , 0.5
p
r
f fW f k
f f
This weighting function permits different peak error in the two band

52/74
/22
0
( ) ( ) ( ) cos 2N
j f
k
H f H e a k k f
min[max ( ) ]E f
Find ( )a k
( ) ( )[ ( ) ( )]IE f W f H f H f
where are and 0, pf f ,0.5rf

53/74
– Alternation theorem
0, ,0.5p rF f f Let
If has equiripple inside bands and more than m+2 extremal point ( )E f F
then
1( ) ( ) , 0,1, , 1i iE f E f e i l
0 1 ( 1)lf f f l m
,0.50, &max ( )
p rf f fe E f
where
( ) ( )IH f H f

54/74
• From equation (7-33) and (7-34)
• Equation (7-35) is substituted equation (7-32)
• Matrix form
( ) ( ) ( ) ( 1) , 0,1,2, , 1ii i I iW f H f H f e i m
0
( ) cos 2 ( ) ( 1) , 0,1,2, , 1( )
mi
i I ik i
ea k kf H f i m
W f
0 0 0 0 0
1 1 1 1
!1 1 1 1
1 cos 2 cos 4 cos 2 1/ ( ) ((0)
1 cos 2 cos 4 cos 2 1/ ( ) (1)
1 cos 2 cos 4 cos 2 ( 1) / ( ) ( )
1 cos 2 cos 4 cos 2 ( 1) / ( )
I
mm m m m
mm m m m
f f mf W f H fa
f f mf W f a
f f mf W f a m
f f mf W f e
1
1
)
( )
( )
( )
I
I m
I m
H f
H f
H f
55/74
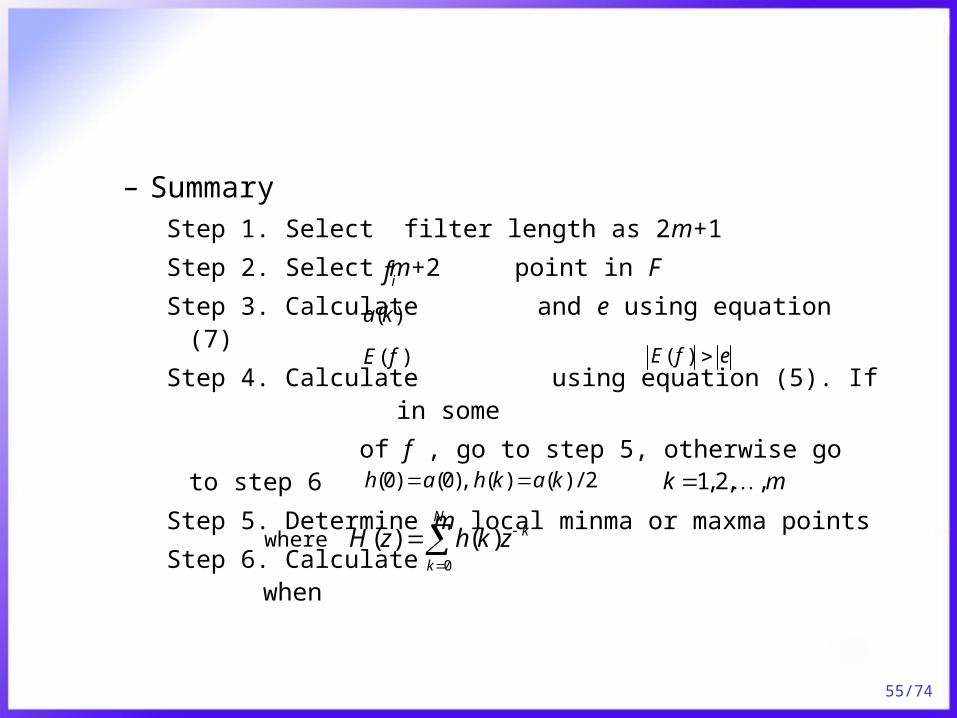
– SummaryStep 1. Select filter length as 2m+1
Step 2. Select m+2 point in F
Step 3. Calculate and e using equation (7)
Step 4. Calculate using equation (5). If in some
of f , go to step 5, otherwise go to step 6
Step 5. Determine m local minma or maxma points
Step 6. Calculate when
if
( )a k
( )E f ( )E f e
(0) (0), ( ) ( ) / 2h a h k a k 1,2, ,k m
where 0
( ) ( )N
k
k
H z h k z

56/74
– Example 7-4• Specification of desired filter
– Ideal low pass filter
– Filter length : 3
–
–
• Normalized frequency
1[rad],pT 1.2[rad]rT
2k
0 1 20.5 / 2 , 1/ 2 , 1.2 / 2f f f

57/74
• From
• Cutoff frequency
1 0.8776 2 (0) 1
1 0.5403 2 (1) 1
1 0.3624 1 0
a
a
e
0 1 2 0 1( ) ( ) 1, ( ) 0, ( ) ( ) 1/ 2I I IH f H f H f W f W f 2and ( ) 1W f
( ) 0.645 2.32cos 2H f f : not the optimal filter
0 1 2
1 1.20.5
2 2f f f
0 1 2 0( ) 1, ( ) ( ) 0, ( ) 0.5,I I IH f H f H f W f 1 2and ( ) ( ) 1W f W f
(0) 0.645, (1) 2.32,a a 0.196e

58/74
1 0.5403 2 (0) 1
1 0.3624 1 (1) 0
1 1 1 0
a
a
e
(0) 0.144, (1) 0.45,a a 0.306e
( ) 0.144 0.45cos 2H f f : has the minimum
(N=3)
max ( )E f

59/74
Fig. 7-13.

60/74
Optimization using MATLAB– Park-McClellan
– Remez
remez( )b N,F, M
remez( )b N,F, M, WT
where N is the filter order (N+1 is the filter length)
F is the normalized frequency of border of pass band
M is the magnitude of frequency response
WT is the weight between ripples

61/74
– Example 7-5• Specification of desired filter
– Band pass region : 0 – 1000Hz
– Transition region : 500Hz
– Filter length : 45
– Sampling frequency : 10,000Hz
• Normalized frequency of border of passband
• Magnitude of frequency response
[0, 0.2, 0.3, 1]F
[11 0 0]M

62/74
Table 7-4.

63/74
Fig.7-14.

64/74
– Example 7-6• Specification of desired filter
– Band pass region : 3kHz – 4kHz
– Transition region : 500Hz
– Pass band ripple : 1dB
– Rejection region : 25dB
– Sampling frequency : 20kHz
• Frequency of border of passband
[2500, 3000, 4000, 4500]F
[0 1 0]M

65/74
• Transform dB to normal value
• Filter length
– Remezord (MATLAB command)
20
20
10 1
10 1
p
p
A
p A
2010
rA
r
where and ripple value(dB) of pass band and rejection band
pA
rA

66/74
Table 7-5.
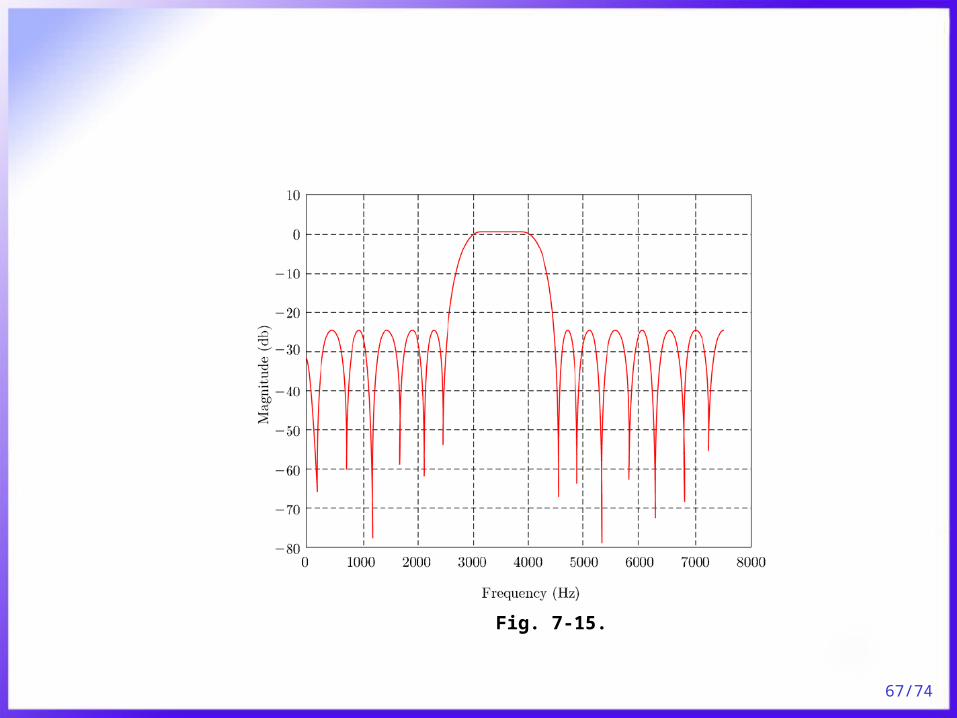
67/74
Fig. 7-15.

68/74
Frequency sampling filters– Taking N samples of the frequency response at intervals
of
– Filter coefficients
7. Frequency sampling method7. Frequency sampling method
/skF N 0,1, , 1k N
( )h n
1(2 / )
0
1( ) ( )
Nj N nk
k
h n H k eN
where are samples of the ideal or target frequency response( ), 0,1, , 1H k k N

69/74
– For linear phase filters (for N even)
– For N odd• Upper limit in summation is
12
1
1( ) 2 ( ) cos[2 ( ) / ] (0)
N
k
h n H k k n N HN
where ( 1) / 2N
( 1) / 2N

70/74
Fig. 7-16.

71/74
– Example 7-7(1) Show the
• Expanding the equation
/2 1
1
1( ) 2 ( ) cos[2 ( ) / ] (0)
N
k
h n H k k n N HN
12 /
0
12 / 2 /
0
12 ( ) /
0
1
0
1
0
1( ) ( )
1( )
1( )
1( ) cos[2 ( ) / ] sin[2 ( ) / ]
1( ) cos[2 ( ) / ]
Nj nk N
k
Nj k N j kn N
k
Nj n k N
k
N
k
N
k
h n H k eN
H k e eN
H k eN
H k k n N j k n NN
H k k n NN
( )h n is real value

72/74
(2) Design of FIR filter
– Band pass region : 0 – 5kHz
– Sampling frequency : 18kHz
– Filter length : 9
Fig. 7-17.

73/74
Table 7-6.
1, 0,1,2( )
0, 3,4
kH k
k
• Samples of magnitude in frequency

74/74
– Window method• The easiest, but lacks flexibility especially when passband and
stopband ripples are different
– Frequency sampling method• Well suited to recursive implementation of FIR filters
– Optimal method• Most powerful and flexible
8. Comparison of most commonly 8. Comparison of most commonly methodmethod