chapter 2 : imaging and image representation computer vision lab. chonbuk national university
TRANSCRIPT
Chapter 2 :Imaging and Image Representation
Computer Vision Lab.Chonbuk National Univers
ity
Contents
2.1 Sensing Light
2.2 Image Device
2.3 Problems in Digital Images*
2.4 Picture Function and Digital Image
2.5 Digital Image Formats *
2.6 Richness and Problems of Real Imagery
2.7 3D Structure from 2D Images
2.8 Five Frames of Reference
2.9 Other Types of Sensors *
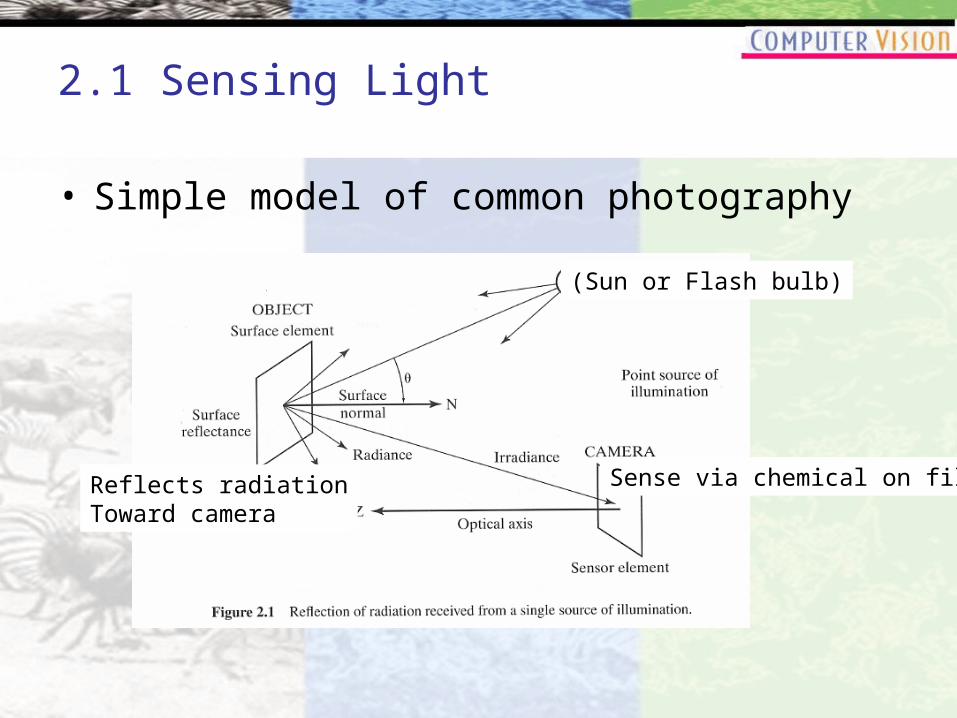
2.1 Sensing Light
• Simple model of common photography
(Sun or Flash bulb)
Reflects radiationToward camera
Sense via chemical on film

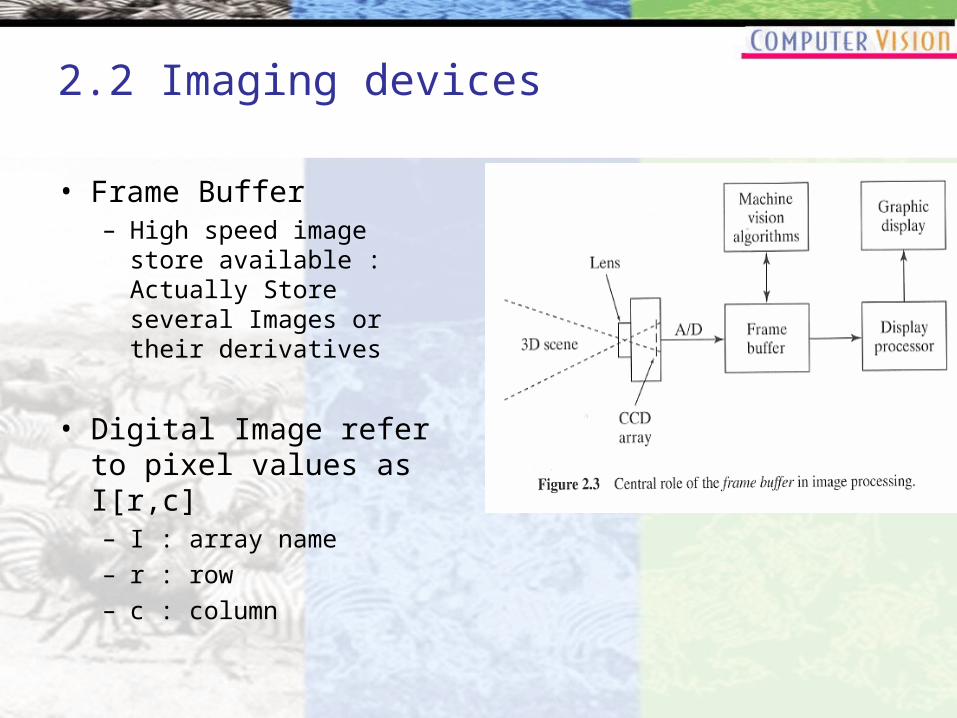
2.2 Imaging devices
• CCD Camera
2.2 Imaging devices
• Frame Buffer – High speed image store
available : Actually Store several Images or their derivatives
• Digital Image refer to pixel values as I[r,c]– I : array name– r : row– c : column
2.2 Imaging devices
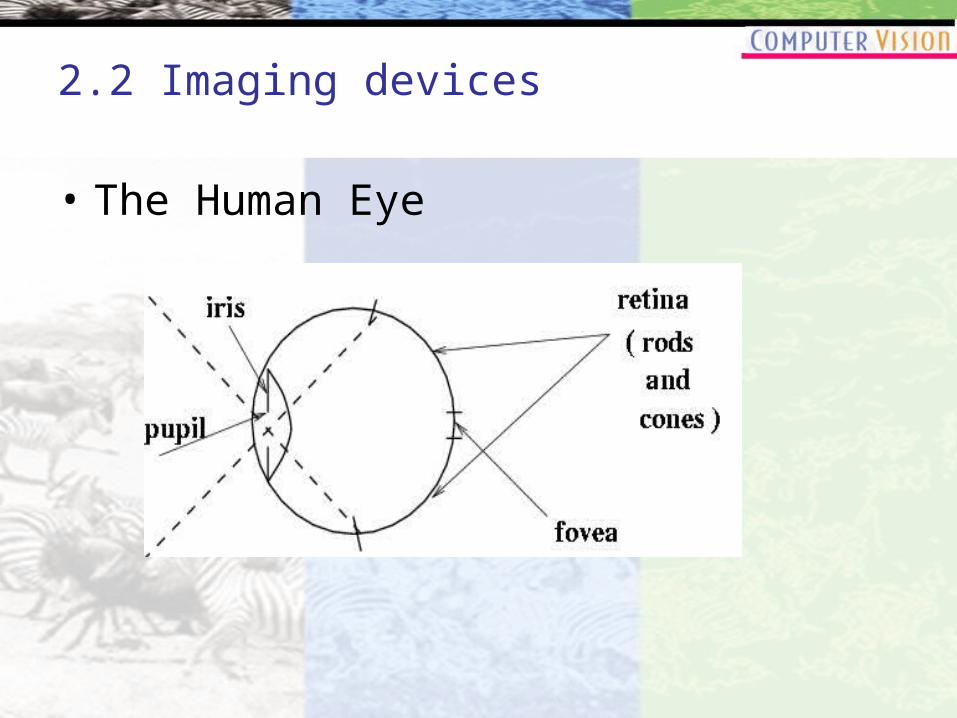
• The Human Eye
2.4 Picture functions and digital images
• Concepts of analog image and digital images• Digital image : 2D rectangular array of discrete values
– Image space and intensity range are quantized into a discrete set of values
– Permitting the image to be stored in 2D computer memory structure– Common intensity range: 8bit (0~255) – In C program, unsigned char I[512][512]
<Def> analog image: F(x,y) which has infinite precision in spatial parameters x and y and infinite precision in intensity at each spatial point (x, y)
<Def> digital image: I[r,c] represented by a discrete 2D array of intensity samples, each of which is represented using a limited precision
2.4 Picture functions and digital images
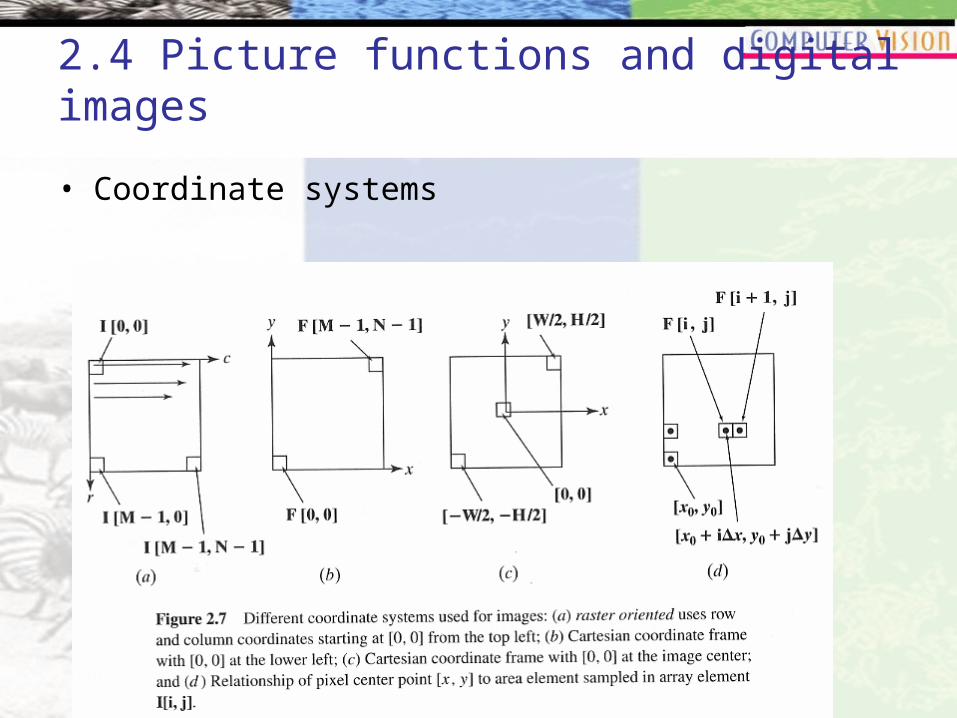
• Coordinate systems
2.4.2 Image Quantization and Spatial Measurement
<Def> picture function: f(x,y) of a picture as a function of two spatial variables x and y that are real values defining points of picture and f(x, y) is usually also real value
<Def> gray scale image: Monochrome digital image I[r,c] with one intensity value per pixel
<Def> multi-spectral image: 2D image M[x,y] has a vector of values at each spatial point or pixel (If image is color, vector has 3 elements)
<Def> binary image: digital image with all pixel values 0 or 1
<Def> labeled image: digital image L[r,c] whose pixel values are symbols from finite alphabet (Related concepts thematic image and pseudo-colored image)
2.4.2 Image Quantization and Spatial Measurement
<def> nominal resolution: size of scene element that images to a single pixel on the image plane
<def> resolution: number of pixels (e.g., 640*480)
2.4.2 Image Quantization and Spatial Measurement
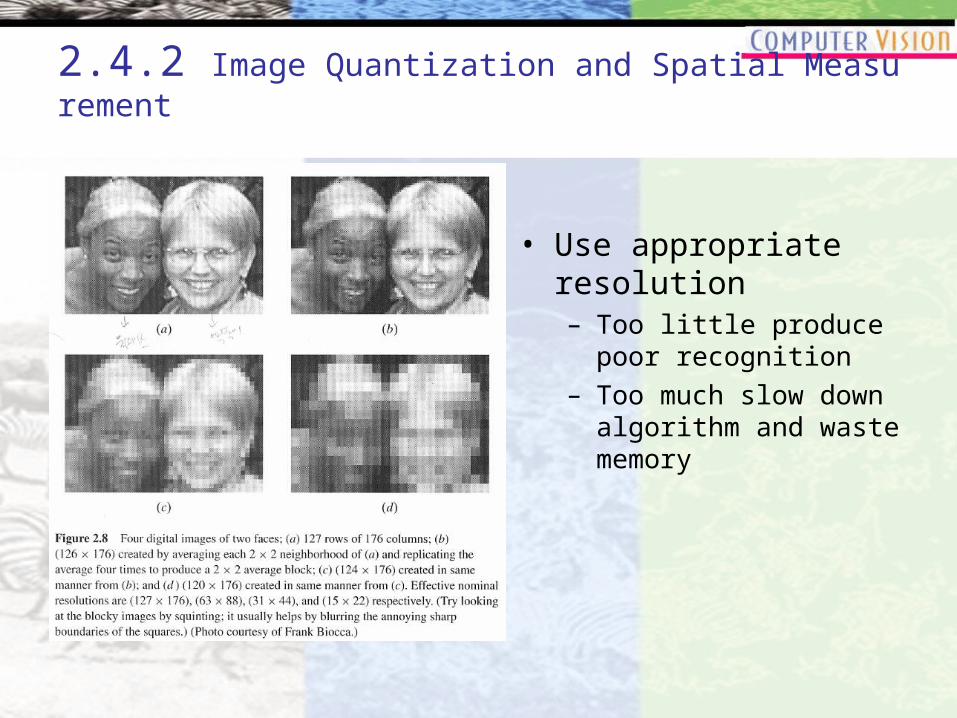
• Use appropriate resolution– Too little produce poor
recognition– Too much slow down
algorithm and waste memory
2.4.2 Image Quantization and Spatial Measurement
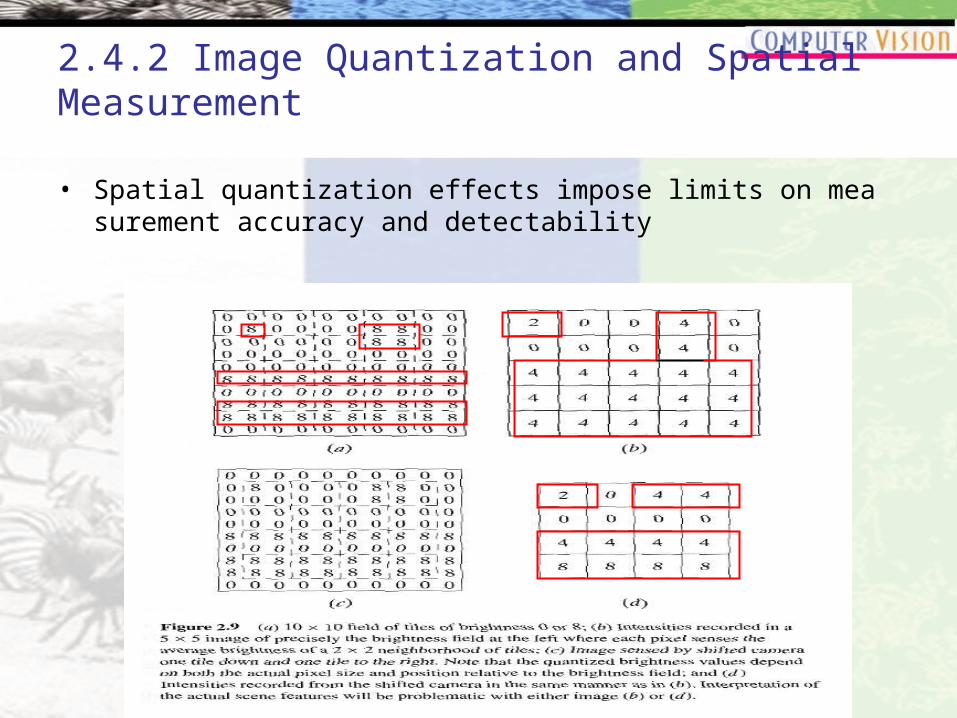
• Spatial quantization effects impose limits on measurement accuracy and detectability
2.5 Digital Image Formats
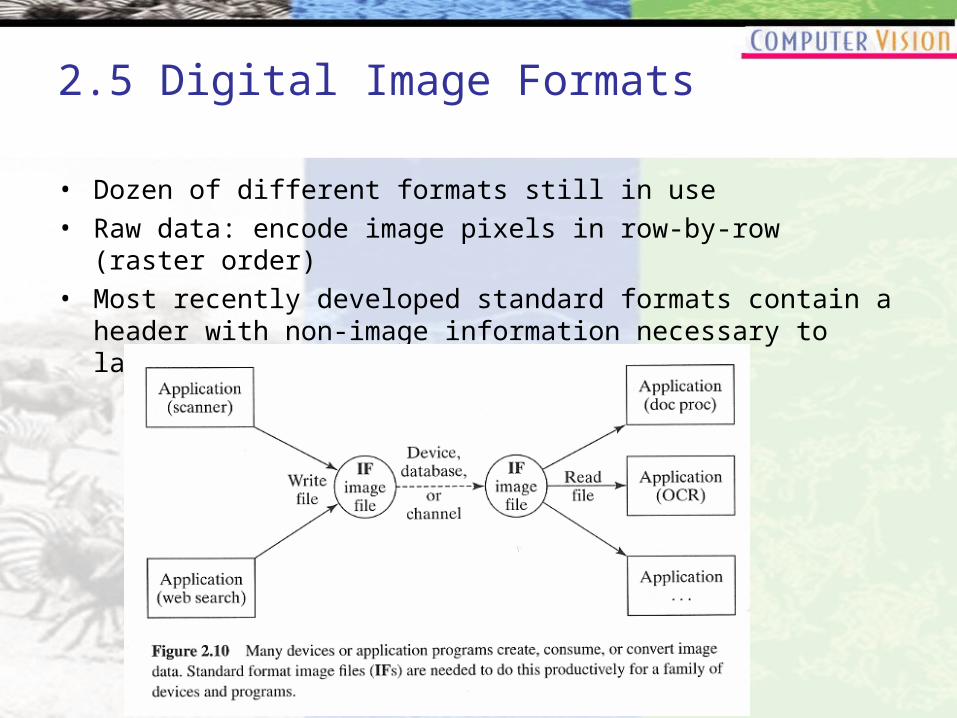
• Dozen of different formats still in use• Raw data: encode image pixels in row-by-row (raster order)• Most recently developed standard formats contain a header with
non-image information necessary to label the data to decode it
2.5.1/2 Image File header & Data
• Image File header– Need to make an image file self-describing so that
image-processing tools can work with them– Should contain :
• image dimension, type, data , title• color table, coding table • history
• Image Data– Nowadays, multimedia format including image data
along with text, graphics, music, etc.
2.5.3 Data Compression
• Reduce the size of an image (30 percent or even 3 percent of raw size)
• Copression can be lossless or lossy – Lossless compression : original image recovered exactly– Lossy compression : loss of quality is perceived (but, not always)
• To implement compression– Include overhead (compression method and parameter)– Loss or change of a few bit having little or no affect on consumer
s (exciting area from signal processing to object recognition)
2.5.4 Commonly Used Formats
• For colleague, Image data base, scanned documents– GIF, JPG, PS, TIFF etc.
• Image/Graphics file formats are still evolving

2.5.5 Run-Coded Binary Images
• Efficient for binary or labeled images• Reduce memory space • Speed up image operations
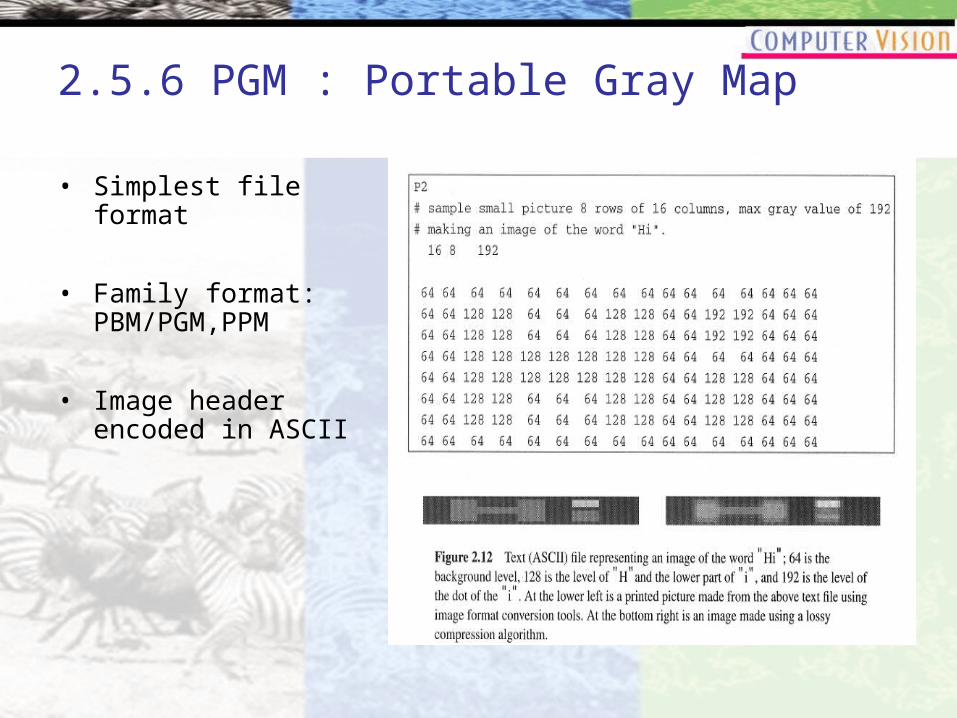
2.5.6 PGM : Portable Gray Map
• Simplest file format
• Family format: PBM/PGM,PPM
• Image header encoded in ASCII

2.5.9 JPEG Image File Format
• JPEG (Joint Photographic Experts Group)• Provide practical compression of high-quality color• Stream oriented and allow realtime hardware for encodin
g and decoding• Up to 64K X 64K pixels of 24 bits• Header contain thumbnail image (up to 64k)• To achieve high compression, flexible but lossy coding
scheme: Unnoticeable degration(1/20)• Compression work well when has large constant regio
ns• Compression scheme : DCT(Discrete Cosine Transfor
m) followed by Huffman coding

2.5.11 MPEG format for video
• Stream-oriented encoding scheme for video, text, and graphics• MPEG stands for Motion Picture Experts Group• MPEG-1
– Primary design for multimedia systems– Data rate
• Compression audio : 0.25 Mbits/s • Compression video : 1.25 Mbits/s
• MPEG-2– Data rate up to 15Mbits/s – Handle high definition TV rates
• Compression scheme takes advantage of both spatial redundancy (used in JPEG) and temporal redundancy, general 1/25, 1/200 possible
• Motion JPEG compression is not good
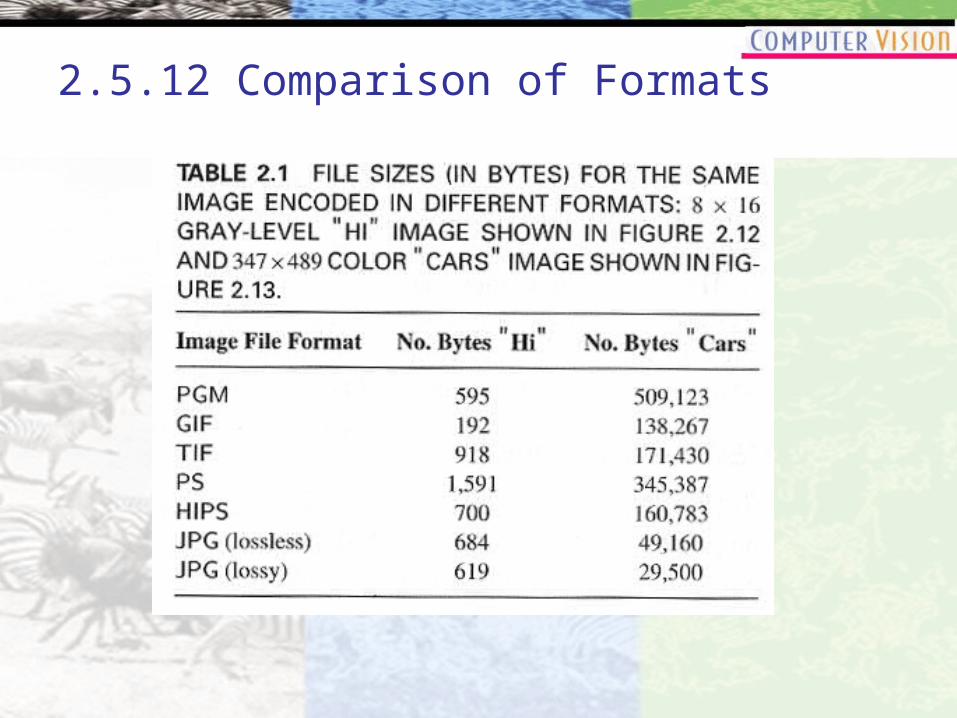
2.5.12 Comparison of Formats

2.6 Richness and Problems of real imagery
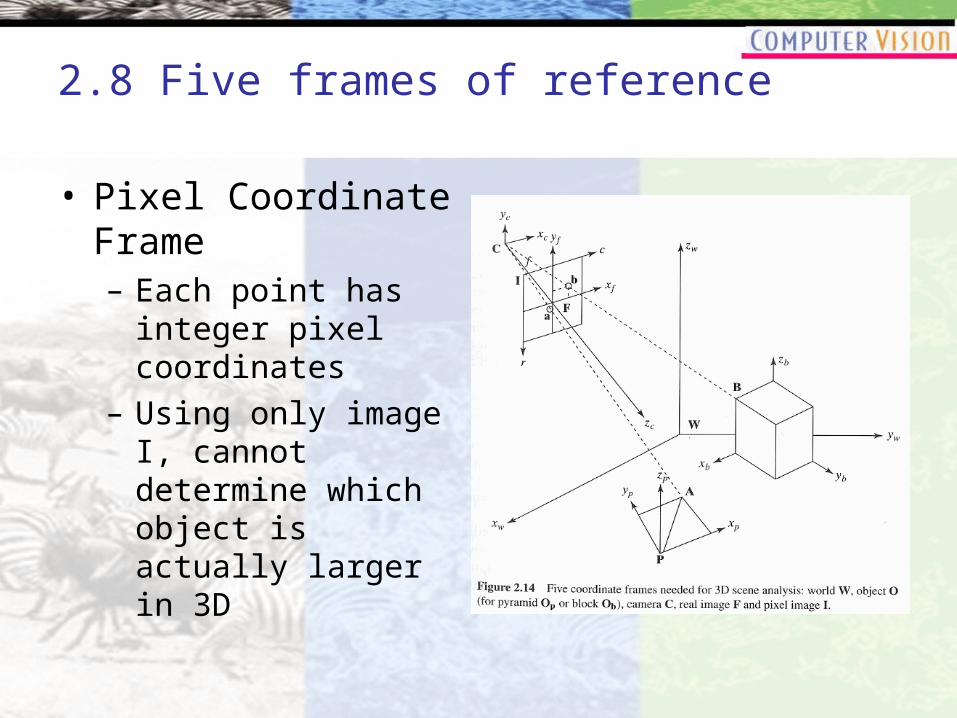
2.8 Five frames of reference
• Pixel Coordinate Frame– Each point has integer
pixel coordinates– Using only image I,
cannot determine which object is actually larger in 3D
2.8 Five frames of reference
• Object Coordinate Frame O– Used to model ideal objects in both computer
graphics and computer vision– Remains the same regardless of how block is posed
related to world
• Camera Coordinate Frame C– Often needed for egocentric (camera centric) view– Represent just in front of the sensor
2.8 Five frames of reference
• Real Image Coordinate Frame F– Coordinate [xf, yf, f]– F : focal length– xf, yf : not description of pixels in the image array but r
elated to the pixel size and pixel position of optical axis in the image
– Frame F contians the picture function digital image in the pixel array I
• World Coordinate Frame W– Needed to relate objects in 3D