ch03 rigid bodies equivalent systems of forces
TRANSCRIPT

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 1/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsE i gh t h
3 - 1
CE 102 Statics
hapter 3
Rigid Bodies:
Equivalent Systems of Forces
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 2/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsE i gh t h
3 - 2
Contents
Introduction
External and Internal Forces
Principle of Transmissibility: Equivalent
Forces
Vector Products of Two Vectors
Moment of a Force About a PointVarion!s T"eorem
#ectanular $omponents of t"e Moment
of a Force
%ample Problem &'(
%calar Product of Two Vectors
%calar Product of Two Vectors:
Applications
Mixed Triple Product of T"ree Vectors
Moment of a Force About a )iven Axis
%ample Problem &'*
Moment of a $ouple
Addition of $ouples
$ouples $an +e #epresented +y Vectors
#esolution of a Force Into a Force at O and a$ouple
%ample Problem &'&
%ystem of Forces: #eduction to a Force and a
$ouple
Furt"er #eduction of a %ystem of Forces
%ample Problem &',
%ample Problem &'-
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 3/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsE i gh t h
3 - 3
Introduction. Treatment of a body as a sinle particle is not always possible' In
eneral/ t"e si0e of t"e body and t"e specific points of application of t"eforces must be considered'
. Most bodies in elementary mec"anics are assumed to be riid/ i'e'/ t"e
actual deformations are small and do not affect t"e conditions of
equilibrium or motion of t"e body'
. $urrent c"apter describes t"e effect of forces exerted on a riid body and
"ow to replace a iven system of forces wit" a simpler equivalent system'
. moment of a force about a point
. moment of a force about an axis
. moment due to a couple
. Any system of forces actin on a riid body can be replaced by an
equivalent system consistin of one force actin at a iven point and one
couple'

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 4/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 4
External and Internal Forces
. Forces actin on riid bodies are
divided into two roups:1 External forces
1 Internal forces
. External forces are s"own in a
free1body diaram'
. If unopposed/ eac" external
force can impart a motion of
translation or rotation/ or bot"'
E
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 5/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 5
Principle of Transmissibility: Equivalent Forces
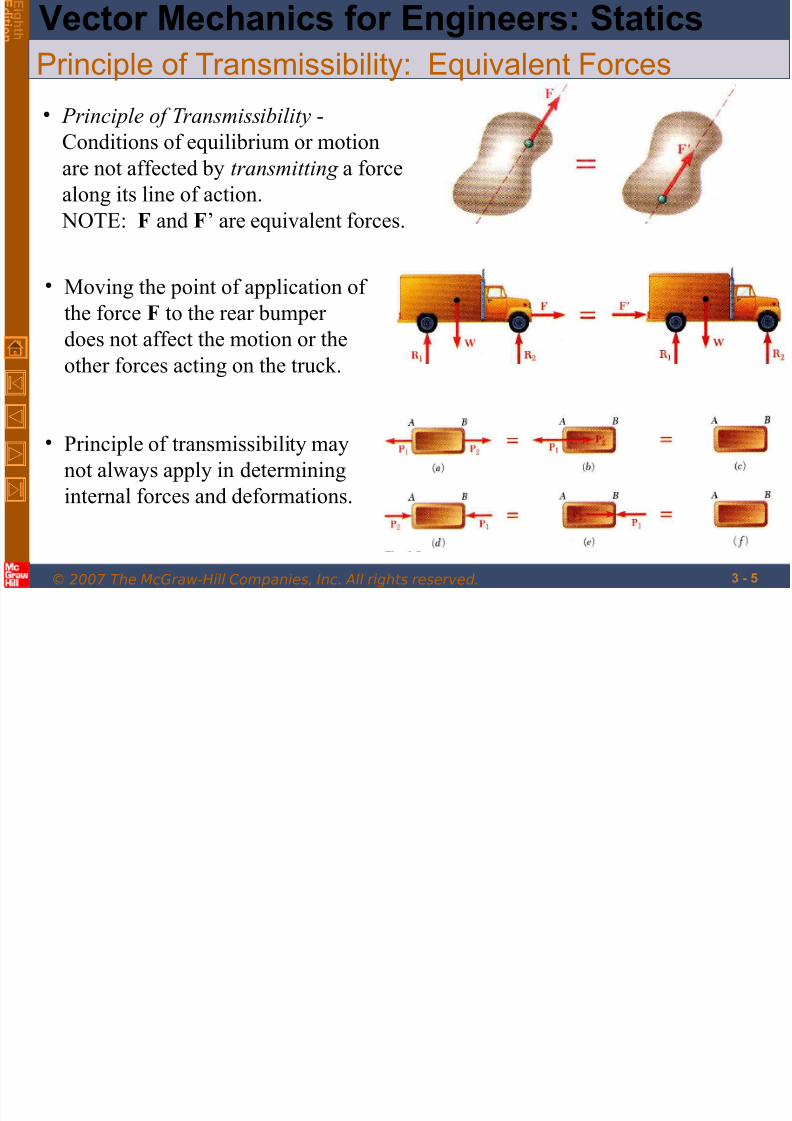
. Principle of Transmissibility 1
$onditions of equilibrium or motionare not affected by transmitting a force
alon its line of action'
23TE: F and F! are equivalent forces'
. Movin t"e point of application of
t"e force F to t"e rear bumper
does not affect t"e motion or t"e
ot"er forces actin on t"e truc4'
. Principle of transmissibility may
not always apply in determinin
internal forces and deformations'
E
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 6/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 6
Vector Product of Two Vectors
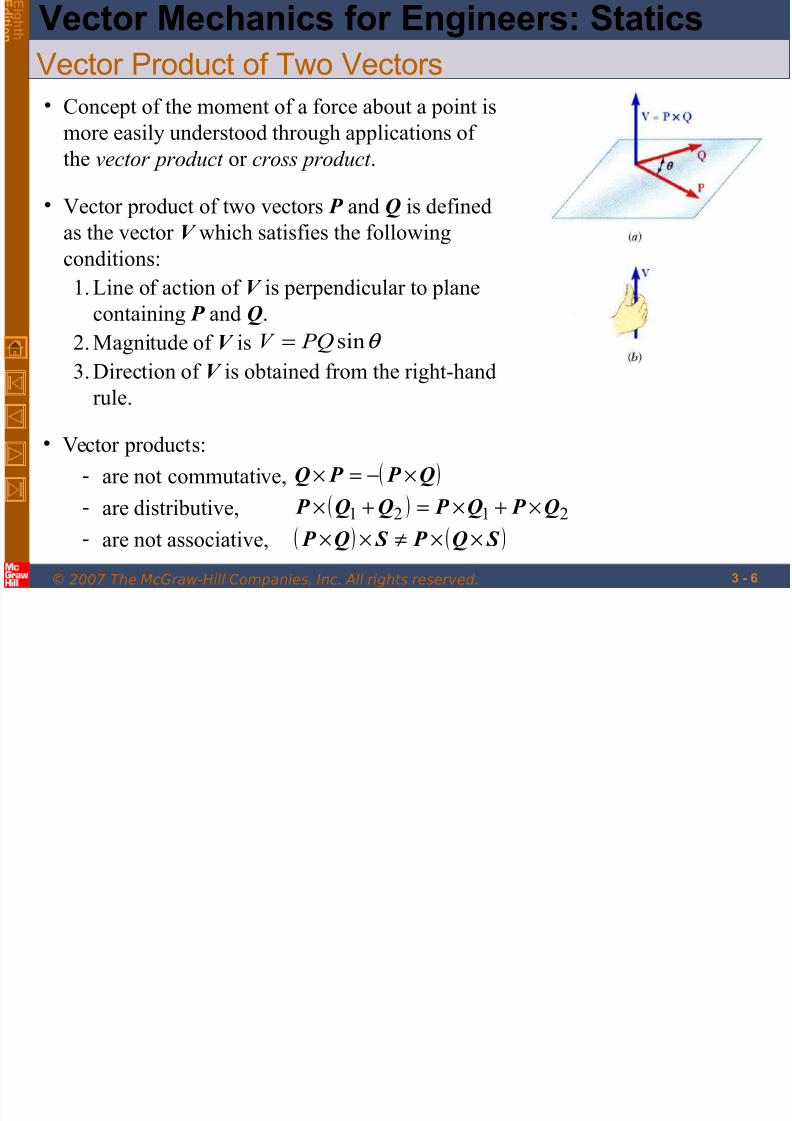
. $oncept of t"e moment of a force about a point is
more easily understood t"rou" applications oft"e vector product or cross product '
. Vector product of two vectors P and Q is defined
as t"e vector V w"ic" satisfies t"e followin
conditions:
(' 5ine of action of V is perpendicular to plane
containin P and Q'
*' Manitude of V is
&' 6irection of V is obtained from t"e ri"t1"and
rule'
θ sinQ P V =
. Vector products:
1 are not commutative/
1 are distributive/
1 are not associative/
( )Q P P Q ×−=×
( ) *(*( Q P Q P QQ P ×+×=+×
( ) ( ) S Q P S Q P ××≠××
E

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 7/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 7
Vector Products: Rectanular Components
. Vector products of $artesian unit vectors/
7
7
7
=×=×−=×
−=×=×=×
=×−=×=×
k k ik j jk i
i jk j jk ji
jik k i jii
. Vector products in terms of rectanularcoordinates
k Q jQiQk P j P i P V z y x z y x ++×++=
( )
( )k Q P Q P
jQ P Q P iQ P Q P
x y y x
z x x z y z z y
−+
−+−=
z y x
z y x
QQQ
P P P
k ji
=
E

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 8/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 8
!oment of a Force "bout a Point. A force vector is defined by its manitude and
direction' Its effect on t"e riid body also dependson it point of application'
. T"e moment of F about O is defined as
F r M O ×=
. T"e moment vector M O is perpendicular to t"e plane containin O and t"e force F '
. Any force F’ t"at "as t"e same manitude and
direction as F / is equivalent if it also "as t"e same line
of action and t"erefore/ produces t"e same moment'
. Manitude of M O measures t"e tendency of t"e force
to cause rotation of t"e body about an axis alon
M O'
T"e sense of t"e moment may be determined by t"e
ri"t1"and rule'
Fd rF O == θ sin
E
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 9/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 9
!oment of a Force "bout a Point
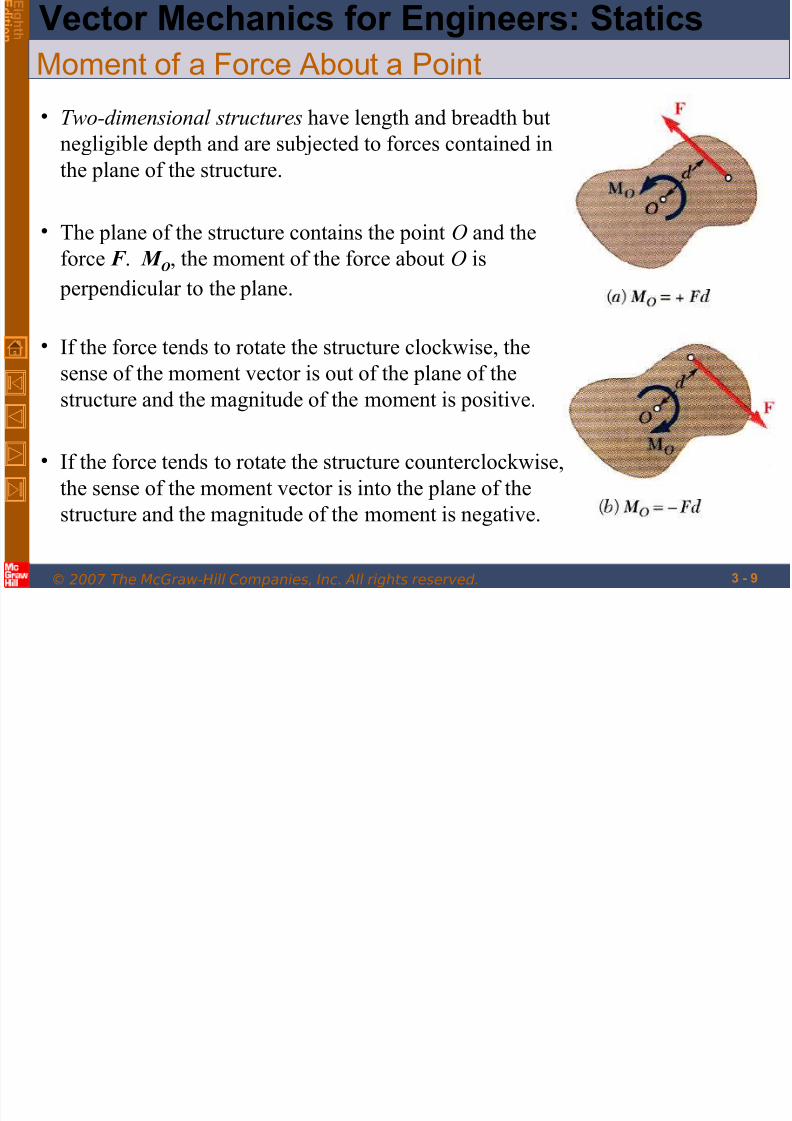
. T!o"dimensional structures "ave lent" and breadt" but
neliible dept" and are sub8ected to forces contained int"e plane of t"e structure'
. T"e plane of t"e structure contains t"e point O and t"e
force F ' M O/ t"e moment of t"e force about O is
perpendicular to t"e plane'
. If t"e force tends to rotate t"e structure cloc4wise/ t"e
sense of t"e moment vector is out of t"e plane of t"e
structure and t"e manitude of t"e moment is positive'
. If t"e force tends to rotate t"e structure countercloc4wise/
t"e sense of t"e moment vector is into t"e plane of t"e
structure and t"e manitude of t"e moment is neative'
f SE
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 10/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 10
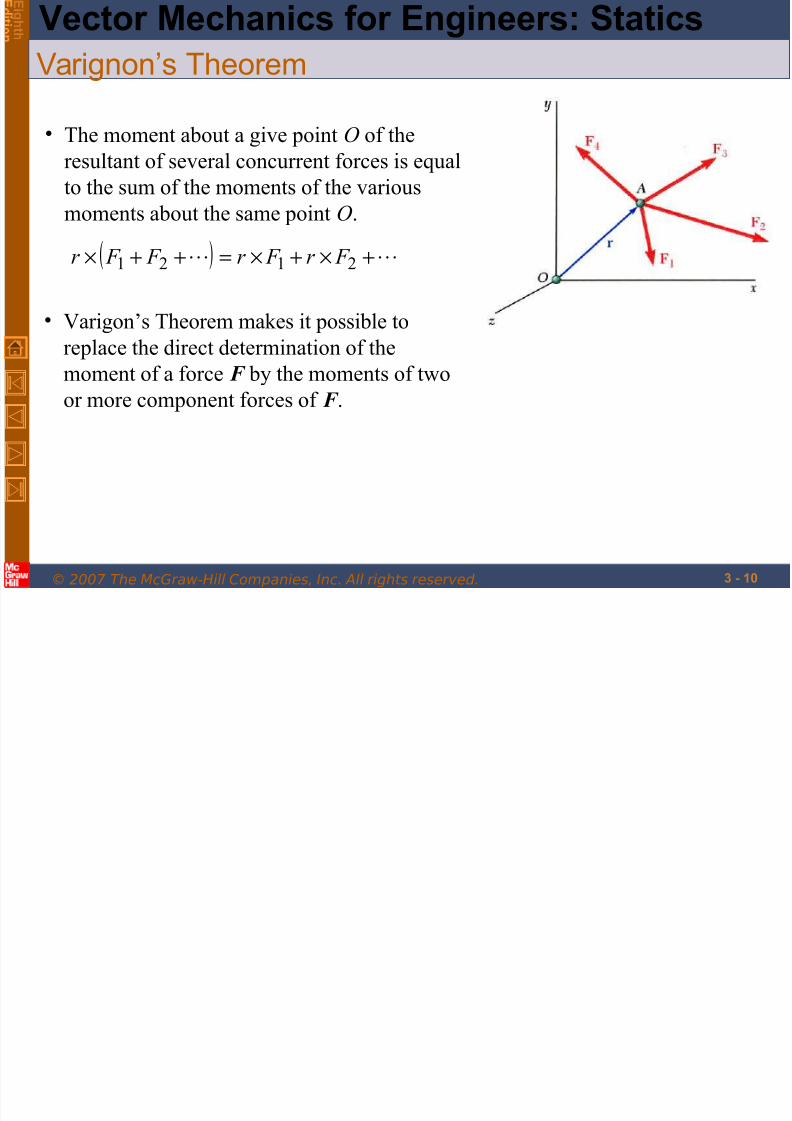
Varinon#s T$eorem
. T"e moment about a ive point O of t"eresultant of several concurrent forces is equal
to t"e sum of t"e moments of t"e various
moments about t"e same point O'
. Varion!s T"eorem ma4es it possible to
replace t"e direct determination of t"e
moment of a force F by t"e moments of two
or more component forces of F '
( ) +×+×=++× *(*( F r F r F F r
V t M h i f E i St tiE

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 11/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 11
Rectanular Components of t$e !oment of a Force
( ) ( ) ( ) k yF xF j xF zF i zF yF
F F F
z y x
k ji
k j i
x y z x y z
z y x
z y xO
−+−+−=
=
++=
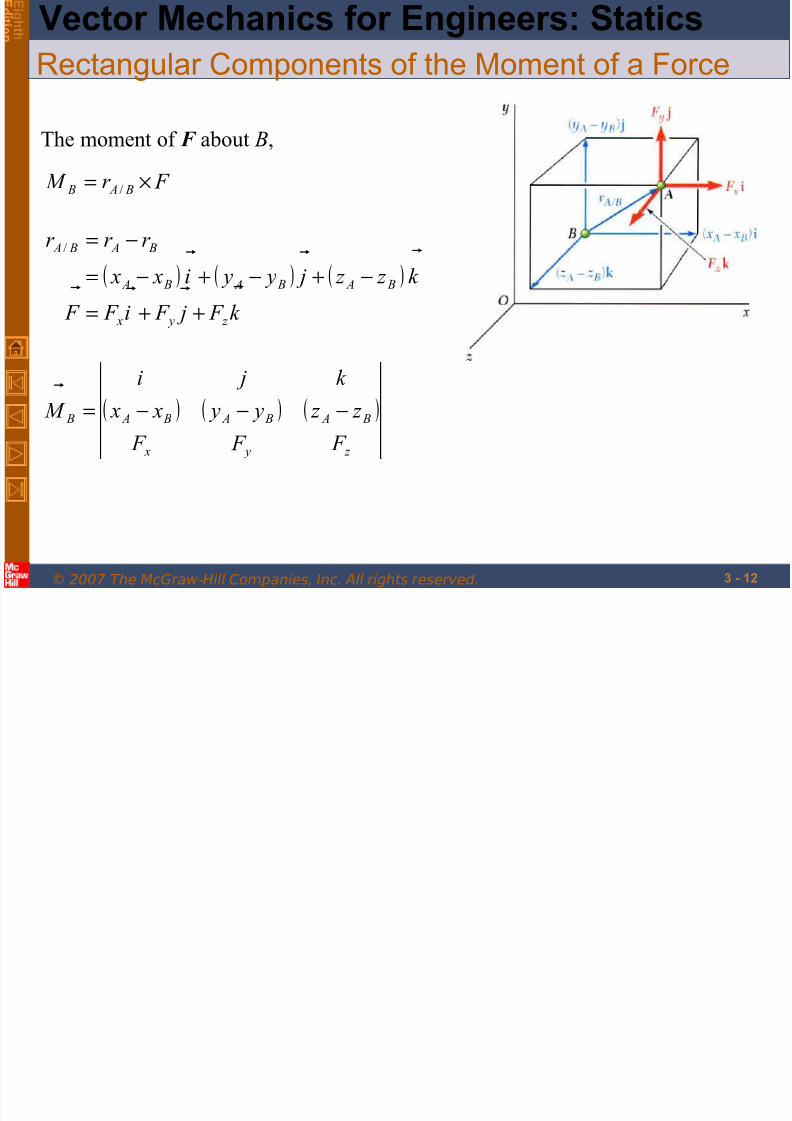
T"e moment of F about O/
k F j F i F F
k z j yi xr F r
z y x
O
++=
++=×= /
V t M h i f E i St tiE
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 12/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 12
Rectanular Components of t$e !oment of a Force
T"e moment of F about #/
F r # $ # ×= 9
( ) ( ) ( )k F j F i F F
k z z j y yi x x
r r r
z y x
# $ # $ # $
# $ # $
++=−+−+−=
−=9
( ) ( ) ( ) z y x
# $ # $ # $ #
F F F z z y y x x
k ji
−−−=
V t M h i f E i St tiE

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 13/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 13
Rectanular Components of t$e !oment of a Force
For two1dimensional structures/
( )
x y
% O
x yO
yF xF
k yF xF
−=
=
−=
( ) ( )[ ]
( ) ( ) x # $ y # $
% #
x # $ y # $ #
F y y F x x
k F y y F x x
−−−=
=
−−−=
V t M h i f E i St tiE

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 14/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 14
%ample Problem &'(
A (771lb vertical force is applied to t"e end of a
lever w"ic" is attac"ed to a s"aft at O'
6etermine:
a moment about O&
b "ori0ontal force at $ w"ic" creates t"e samemoment/
c smallest force at A w"ic" produces t"e same
moment/
d location for a *,71lb vertical force to produce
t"e same moment/
e w"et"er any of t"e forces from b/ c/ and d is
equivalent to t"e oriinal force'
V t M h i f E i St tiE
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 15/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 15
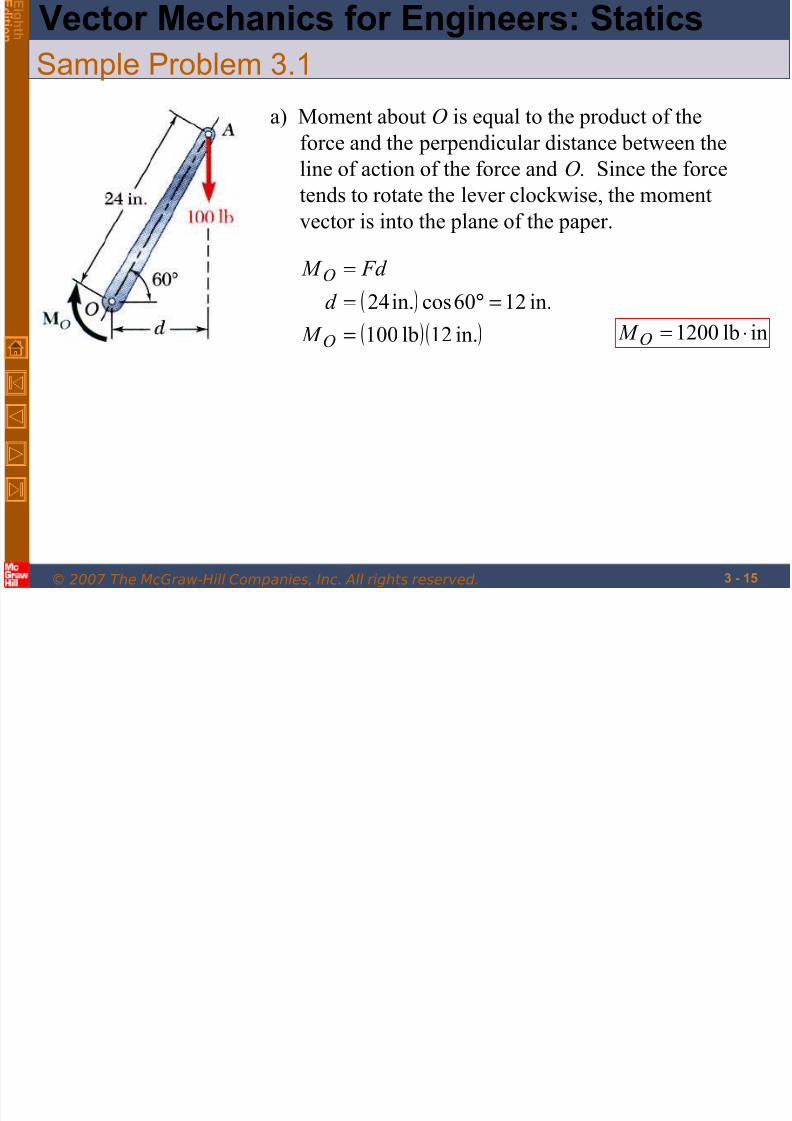
%ample Problem &'(
a Moment about O is equal to t"e product of t"e
force and t"e perpendicular distance between t"eline of action of t"e force and O' %ince t"e force
tends to rotate t"e lever cloc4wise/ t"e moment
vector is into t"e plane of t"e paper'
( )
( ) ( )in'(*lb(77
in'(*;7cosin'*,
=
=°==
O
O
d Fd
inlb(*77 ⋅=O
V t M h i f E i St tiE i

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 16/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 16
%ample Problem &'(
b <ori0ontal force at $ t"at produces t"e same
moment/
( )
( )
in'='*7in'lb(*77
in'='*7in'lb(*77
in'='*7;7sinin'*,
⋅=
=⋅
=
=°=
F
F
Fd
d
O
lb>'->= F
V t M h i f E i St tiE i
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 17/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: StaticsEi gh t h
3 - 17
%ample Problem &'(
c T"e smallest force $ to produce t"e same moment
occurs w"en t"e perpendicular distance is amaximum or w"en F is perpendicular to O$'
( )
in',*
in'lb(*77
in',*in'lb(*77
⋅=
=⋅
=
F
F
Fd O
lb-7= F
V t M h i f E i St tiE i

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 18/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsi gh t h
3 - 18
%ample Problem &'(
d To determine t"e point of application of a *,7 lb
force to produce t"e same moment/
( )
in'-cos;7
in'-lb,7*
in'lb(*77
lb*,7in'lb(*77
=°
=⋅
=
=⋅
=
O#
d
d
Fd O
in'(7=O#
Vector Mechanics for Engineers StaticsE i

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 19/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Statics gh t h
3 - 19
%ample Problem &'(
e Alt"ou" eac" of t"e forces in parts b/ c/ and d produces t"e same moment as t"e (77 lb force/ none
are of t"e same manitude and sense/ or on t"e same
line of action' 2one of t"e forces is equivalent to t"e
(77 lb force'
Vector Mechanics for Engineers: StaticsE i

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 20/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsgh t h
3 - 20
%ample Problem &')
T"e rectanular plate is supported by
t"e brac4ets at $ and # and by a wire
()' ?nowin t"at t"e tension in t"e
wire is *77 2/ determine t"e moment
about $ of t"e force exerted by t"e
wire at ( '
%35@TI32:
T"e moment $ of t"e force F exerted
by t"e wire is obtained by evaluatin
t"e vector product/
F r $( $ ×=
Vector Mechanics for Engineers: StaticsE i g

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 21/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsgh t h
3 - 21
%ample Problem &')%35@TI32:
(*=;(*7
7=77&7
= ''
k ji
F F F
z z y y x x
k ji
z y x
$( $( $( $
( ) ( ) ( )k ji $ m 2='=*m 2='=*m 2;='> ⋅+⋅+⋅−=
F r $( $ ×=
( )
( ) ( ) ( ) ( )
( ) ( ) ( )k ji
k jir
r F F
)(
)(
2(*= 2; 2(*7
m-'7
m&*'7m7'*,m&'7 2*77
2*77
−+−=
−+−=
== λ
→
k 'i'r r r $( $( m7=7m&7
B7'&/ 7/ 7',
B7/7/7'&*
Vector Mechanics for Engineers: StaticsE i g

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 22/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsgh t h
3 - 22
%calar Product of Two Vectors
. T"e scalar product or dot product between
two vectors P and Q is defined as( )resultscalar cosθ PQQ P =•
. %calar products:
1 are commutative/
1 are distributive/1 are not associative/
P QQ P •=•
( ) *(*( Q P Q P QQ P •+•=+•( ) undefined=•• * Q P
. %calar products wit" $artesian unit components/
777((( =•=•=•=•=•=• ik k j jik k j jii
( ( k Q jQiQk P j P i P Q P z y x z y x ++•++=•
**** P P P P P P
Q P Q P Q P Q P
z y x
z z y y x x
=++=•
++=•
Vector Mechanics for Engineers: StaticsE i g
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 23/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsgh t h
3 - 23
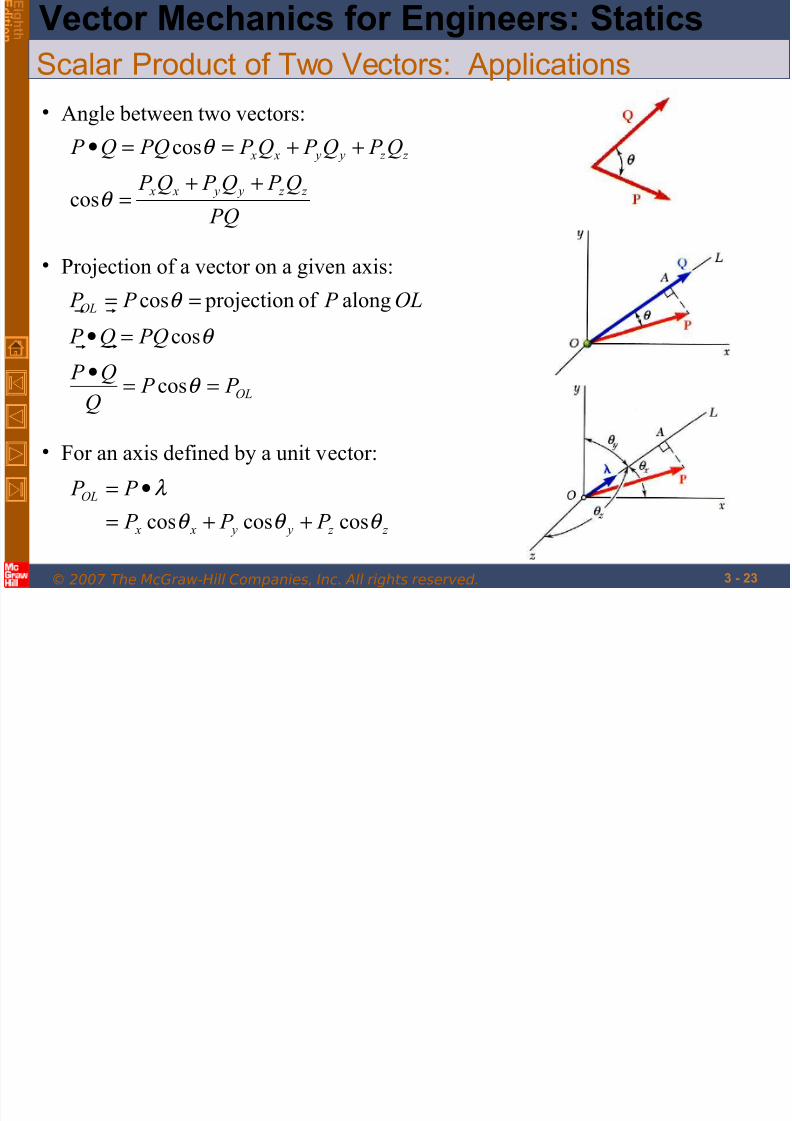
%calar Product of Two Vectors: "pplications
. Anle between two vectors:
PQ
Q P Q P Q P
Q P Q P Q P PQQ P
z z y y x x
z z y y x x
++=
++==•
θ
θ
cos
cos
. Pro8ection of a vector on a iven axis:
O+
O+
P P Q
Q P
PQQ P
O+ P P P
==•
=•
==
θ
θ
θ
cos
cos
alonof pro8ectioncos
z z y y x x
O+
P P P
P P
θ θ θ
λ
coscoscos ++=
•=
. For an axis defined by a unit vector:
Vector Mechanics for Engineers: StaticsE i g

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 24/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsgh t h
3 - 24
!ixed Triple Product of T$ree Vectors
. Mixed triple product of t"ree vectors/
( ) resultscalar=ו Q P *
. T"e six mixed triple products formed from S / P / and
Q "ave equal manitudes but not t"e same sin/
( ) ( ) ( )* P QQ* P P Q*
P * Q* Q P Q P *
ו−=ו−=ו−=
ו=ו=ו
( ) ( )
( )
z y x
z y x
z y x
x y y x z
z x x z y y z z y x
QQQ
P P P
* * *
Q P Q P *
Q P Q P * Q P Q P * Q P *
=
−+
−+−=ו
. Evaluatin t"e mixed triple product/
Vector Mechanics for Engineers: StaticsE i g

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 25/76© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsgh t h
3 - 25
!oment of a Force "bout a *iven "xis
. Moment M O of a force F applied at t"e point A
about a point O/ F r O ×=
. %calar moment O+ about an axis OL is t"e
pro8ection of t"e moment vector M O onto t"e
axis/( ) F r OO+ ו=•= λ λ
. Moments of F about t"e coordinate axes/
x y z
z x y
y z x
yF xF
xF zF zF yF
−=
−=−=
Vector Mechanics for Engineers: StaticsE i g

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 26/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsgh t h
3 - 26
!oment of a Force "bout a *iven "xis
. Moment of a force about an arbitrary axis/
( )
# $ # $
# $
# #+
r r r
F r
−=
ו=
•=
λ
λ
. T"e result is independent of t"e point #
alon t"e iven axis'
Vector Mechanics for Engineers: StaticsE i g

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 27/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsgh t h
3 - 27
%ample Problem &'&
a about $
b about t"e ede $# and
c about t"e diaonal $, of t"e cube'd 6etermine t"e perpendicular distance
between $, and F( '
A cube is acted on by a force P as
s"own' 6etermine t"e moment of P
Vector Mechanics for Engineers: StaticsE i g

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 28/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsgh t h
3 - 28
%ample Problem &'&
. Moment of P about $/
( )
( ) ( )( ) ( )k j P jia
k j P k j P P
jia jaiar
P r
$
$ F
$ F $
−×−=
−=−=
−=−=
×=
*9
*9*9(*9(
( )( )k jiaP $ ++= *9
. Moment of P about $#&
( )( )k jiaP i
i $ $#
++•=
•=
*9
*9aP $# =
Vector Mechanics for Engineers: StaticsE i g

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 29/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsgh t h
3 - 29
%ample Problem &'&
. Moment of P about t"e diaonal $,/
( )
( )
( ) ( )
( )(((;
*&
(*
&
(
&
−−=
++•−−=
++=
−−=−−
==
•=
aP
k jiaP
k ji
k jiaP
k jia
k a jaia
r
r
$,
$
, $
, $
$ $,
λ
λ
;
aP $, −=
Vector Mechanics for Engineers: StaticsE i g

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 30/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsh t h
3 - 30
%ample Problem &'&
. Perpendicular distance between $, and F(&
( ) ( ) ( )
7
((7;&
(
*
=
+−=−−•−=• P
k jik j P
P
λ
T"erefore/ P is perpendicular to $,'
Pd aP
$, ==;
;
ad =
Vector Mechanics for Engineers: StaticsE i g

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 31/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsh t h
3 - 31
!oment of a Couple
. Two forces F and 1F "avin t"e same manitude/
parallel lines of action/ and opposite sense aresaid to form a couple'
. Moment of t"e couple/
( )
Fd rF
F r
F r r
F r F r
# $
# $
==
×=
×−=
−×+×=
θ sin
. T"e moment vector of t"e couple isindependent of t"e c"oice of t"e oriin of t"e
coordinate axes/ i'e'/ it is a free vector t"at
can be applied at any point wit" t"e same
effect'
Vector Mechanics for Engineers: StaticsE i gh
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 32/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsh t h
3 - 32
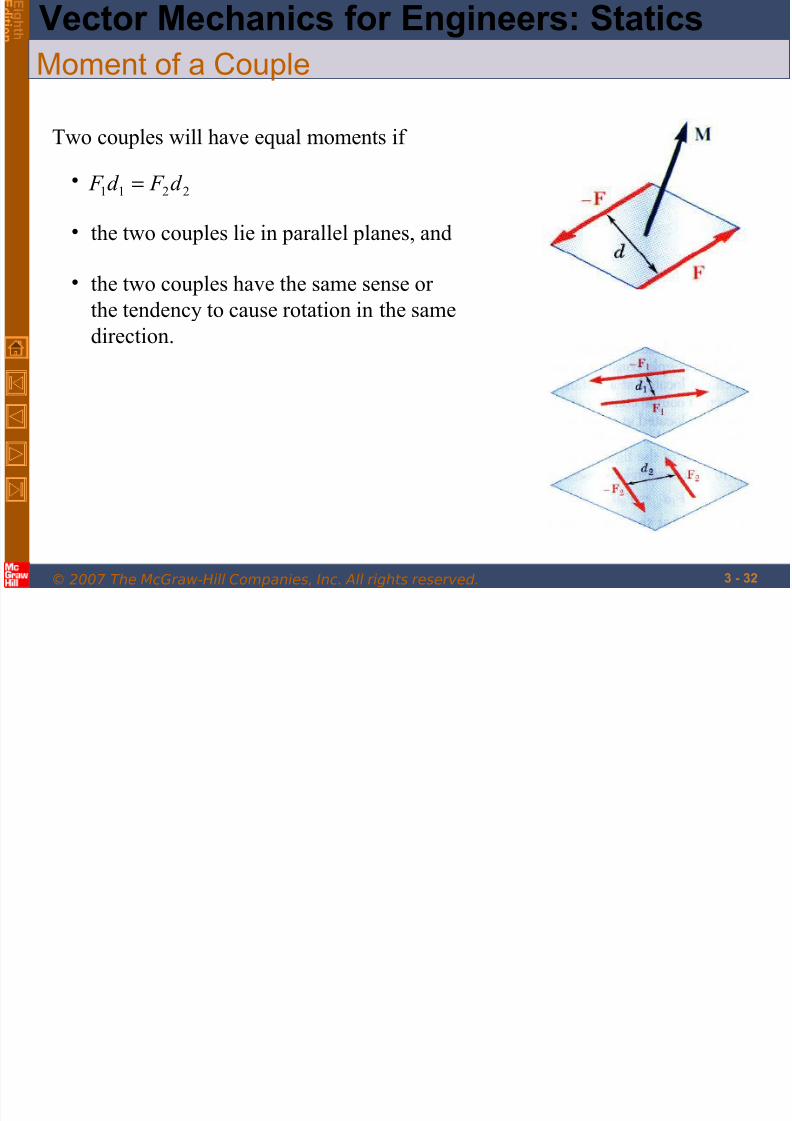
!oment of a Couple
Two couples will "ave equal moments if
. **(( d F d F =
. t"e two couples lie in parallel planes/ and
. t"e two couples "ave t"e same sense ort"e tendency to cause rotation in t"e same
direction'
Vector Mechanics for Engineers: StaticsE i gh
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 33/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsh t h
3 - 33
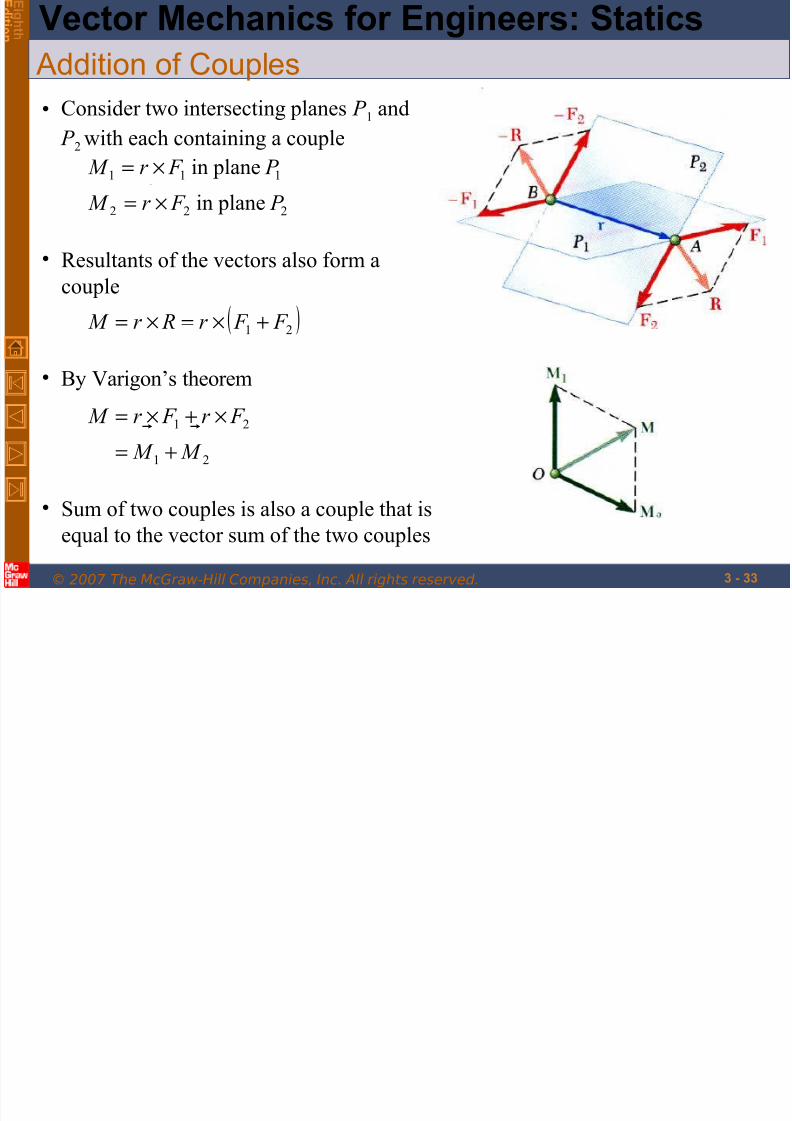
"ddition of Couples
. $onsider two intersectin planes P ( and
P * wit" eac" containin a couple
***
(((
planein
planein
P F r
P F r
×=
×=
. #esultants of t"e vectors also form a
couple
( )*( F F r -r +×=×=
. +y Varion!s t"eorem
*(
*(
F r F r
+=×+×=
. %um of two couples is also a couple t"at is
equal to t"e vector sum of t"e two couples
Vector Mechanics for Engineers: StaticsE i gh

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 34/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsh t h
3 - 34
Couples Can +e Represented by Vectors
. A couple can be represented by a vector wit" manitudeand direction equal to t"e moment of t"e couple'
. (ouple vectors obey t"e law of addition of vectors'
. $ouple vectors are free vectors/ i'e'/ t"e point of applicationis not sinificant'
. $ouple vectors may be resolved into component vectors'
Vector Mechanics for Engineers: StaticsE i gh

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 35/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsh t h
3 - 35
Resolution of a Force Into a Force at O and a Couple
. Force vector F can not be simply moved to O wit"out modifyin its
action on t"e body'
. Attac"in equal and opposite force vectors at O produces no net
effect on t"e body'
. T"e t"ree forces may be replaced by an equivalent force vector and
couple vector/ i'e/ a force"couple system'
Vector Mechanics for Engineers: StaticsE i gh

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 36/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsh t h
3 - 36
Resolution of a Force Into a Force at O and a Couple
. Movin F from $ to a different point O. requires t"e
addition of a different couple vector M O’
F r O ×′=C
. T"e moments of F about 3 and O. are related/
( )
F s
F s F r F sr F r
O
O
×+=
×+×=×+=×= CC
. Movin t"e force1couple system from O to O. requires t"e
addition of t"e moment of t"e force at O about O. '
Vector Mechanics for Engineers: StaticsE i gh

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 37/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsh t h
3 - 37
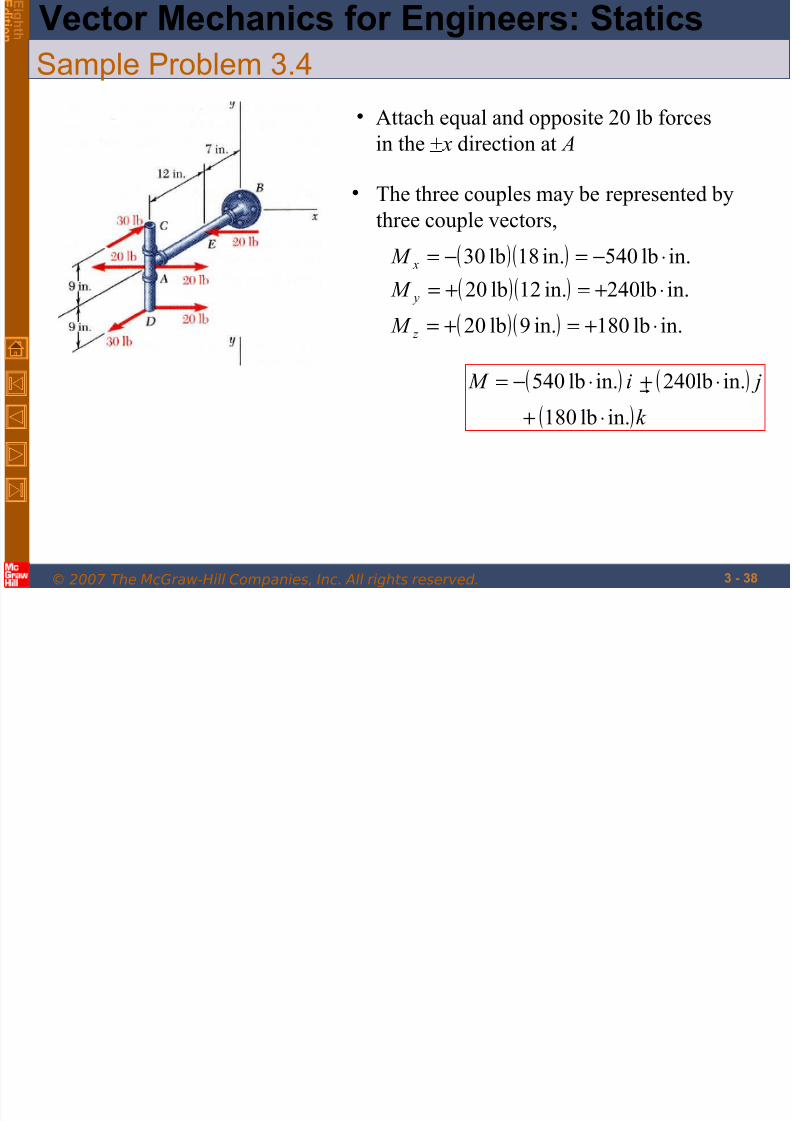
%ample Problem &',
6etermine t"e components of t"esinle couple equivalent to t"e
couples s"own'
%35@TI32:
. Attac" equal and opposite *7 lb forces int"e D x direction at $/ t"ereby producin &
couples for w"ic" t"e moment components
are easily computed'
. Alternatively/ compute t"e sum of t"e
moments of t"e four forces about an
arbitrary sinle point' T"e point ) is a
ood c"oice as only two of t"e forces will
produce non10ero moment contributions''
Vector Mechanics for Engineers: StaticsE i gh
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 38/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsh t h
3 - 38
%ample Problem &',
. Attac" equal and opposite *7 lb forces
in t"e D x direction at $
. T"e t"ree couples may be represented by
t"ree couple vectors/
( ) ( )
( ) ( )
( ) ( ) in'lb(=7in'lb*7
in'lb*,7in'(*lb*7
in'lb-,7in'(=lb&7
⋅+=+=
⋅+=+=
⋅−=−=
z
y
x
( ) ( )
( )k
ji
in'lb(=7
in'lb*,7in'lb-,7
⋅+
⋅+⋅−=
Vector Mechanics for Engineers: StaticsE i gh

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 39/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsh t h
3 - 39
%ample Problem &',
. Alternatively/ compute t"e sum of t"e
moments of t"e four forces about )'
. 3nly t"e forces at ( and / contribute to
t"e moment about )'
( ) ( )
( ) ( )[ ] ( ) ik j
k j )
lb*7in'(*in'
lb&7in'(=
−×−+
−×==
( ) ( )
( )k
ji
in'lb(=7
in'lb*,7in'lb-,7
⋅+
⋅+⋅−=
Vector Mechanics for Engineers: StaticsE i gh

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 40/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Statics t h
3 - 40
%ystem of Forces: Reduction to a Force and Couple
. A system of forces may be replaced by a collection of
force1couple systems actin a iven point O
. T"e force and couple vectors may be combined into a
resultant force vector and a resultant couple vector/
( )∑∑ ×== F r F - -
O
. T"e force1couple system at O may be moved to O. wit" t"e addition of t"e moment of R about O. /
- s -
O
-
O ×+=C
. Two systems of forces are equivalent if t"ey can be
reduced to t"e same force1couple system'
Vector Mechanics for Engineers: StaticsE i gh

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 41/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsth
3 - 41
Furt$er Reduction of a %ystem of Forces
. If t"e resultant force and couple at O are mutually
perpendicular/ t"ey can be replaced by a sinle force actinalon a new line of action'
. T"e resultant force1couple system for a system of forces
will be mutually perpendicular if:
( t"e forces are concurrent/
* t"e forces are coplanar/ or& t"e forces are parallel'
Vector Mechanics for Engineers: StaticsE i gh t
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 42/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsth
3 - 42
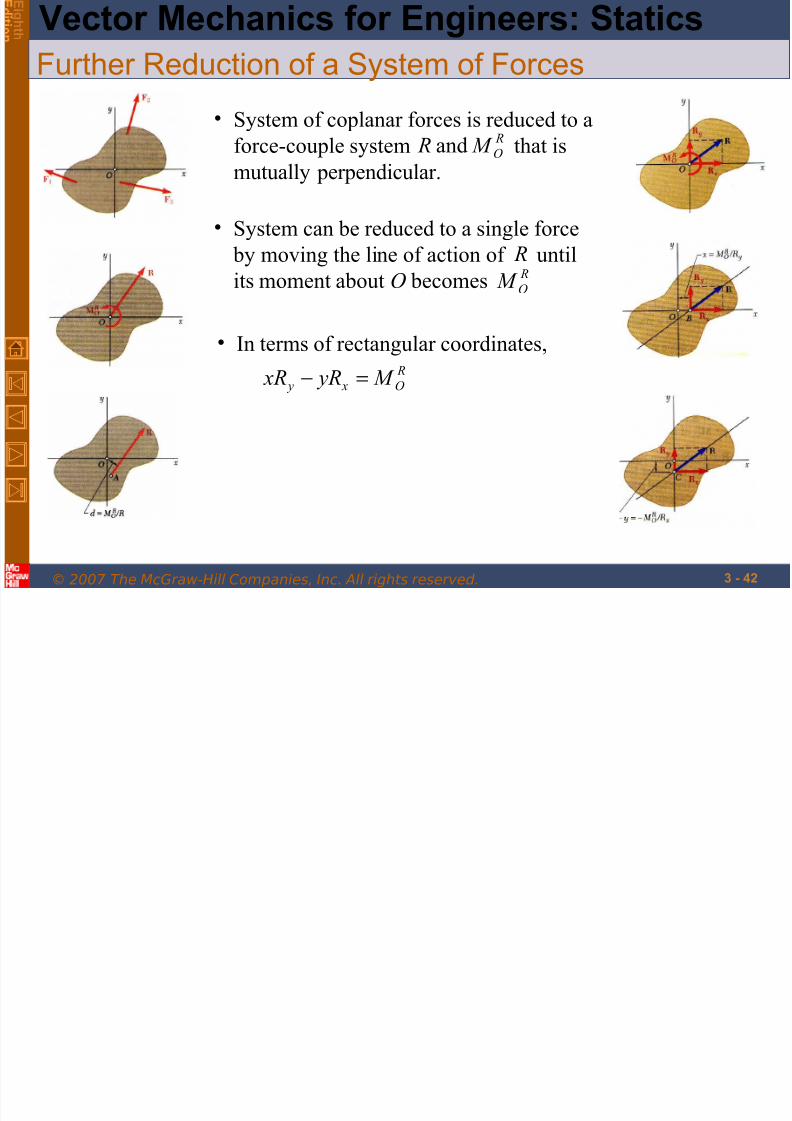
Furt$er Reduction of a %ystem of Forces
. %ystem of coplanar forces is reduced to a
force1couple system t"at ismutually perpendicular'
-O - and
. %ystem can be reduced to a sinle force
by movin t"e line of action of until
its moment about O becomes -
O
-
. In terms of rectanular coordinates/ -
O x y y- x- =−
Vector Mechanics for Engineers: StaticsE i gh t

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 43/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsth
3 - 43
%ample Problem &'-
For t"e beam/ reduce t"e system of
forces s"own to Ba an equivalent
force1couple system at $/ Bb an
equivalent force couple system at #/
and Bc a sinle force or resultant'
2ote: %ince t"e support reactions are
not included/ t"e iven system will
not maintain t"e beam in equilibrium'
%35@TI32:
a $ompute t"e resultant force for t"e
forces s"own and t"e resultant
couple for t"e moments of t"e
forces about $'
b Find an equivalent force1couple
system at # based on t"e force1
couple system at $'
c 6etermine t"e point of application
for t"e resultant force suc" t"at itsmoment about $ is equal to t"e
resultant couple at $'
Vector Mechanics for Engineers: StaticsE i gh t
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 44/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsth
3 - 44
%ample Problem &'-
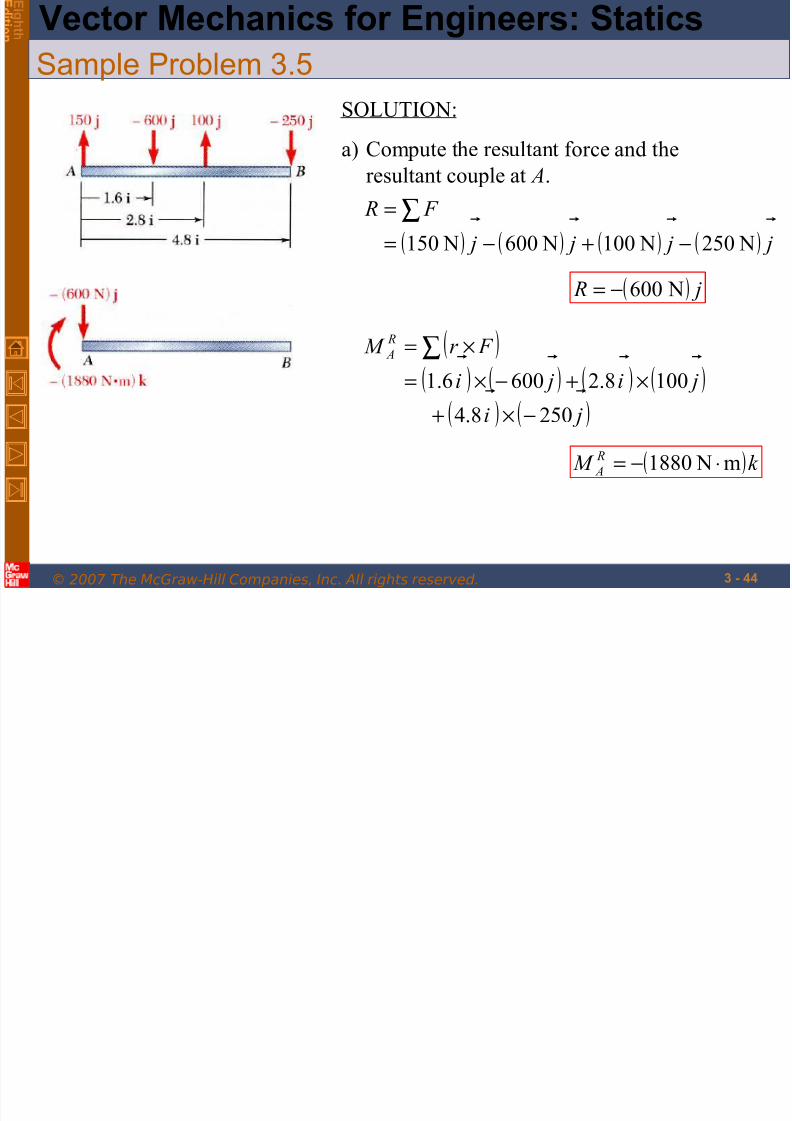
%35@TI32:
a $ompute t"e resultant force and t"eresultant couple at $'
( ) ( ) ( ) ( ) j j j j
F -
2*-7 2(77 2;77 2(-7 −+−=
=∑
( ) j - 2;77−=
( )( ) ( ) ( ) ( )
( ) ( ) ji
ji ji
F r - $
*-7=',
(77='*;77;'(
−×+
×+−×=
×=∑
( )k - $ m 2(==7 ⋅−=
Vector Mechanics for Engineers: StaticsE i gh t
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 45/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsth
3 - 45
%ample Problem &'-
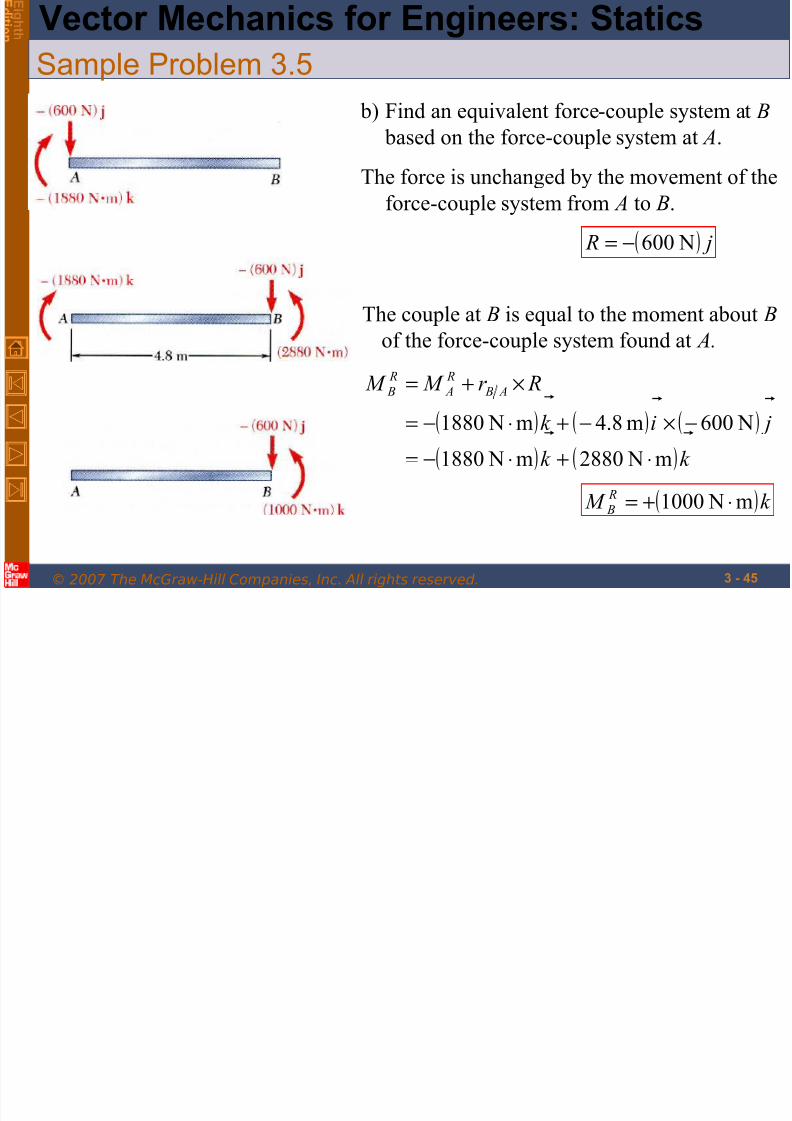
b Find an equivalent force1couple system at #
based on t"e force1couple system at $'T"e force is unc"aned by t"e movement of t"e
force1couple system from $ to #'
( ) j - 2;77−=
T"e couple at # is equal to t"e moment about #
of t"e force1couple system found at $'
( ) ( ) ( )( ) ( )k k
jik
-r $ #
-
$
-
#
m 2*==7m 2(==7
2;77m=',m 2(==7
⋅+⋅−=
−×−+⋅−=
×+=
( )k - # m 2(777 ⋅+=
Vector Mechanics for Engineers: StaticsE i gh t

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 46/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsth
3 - 46
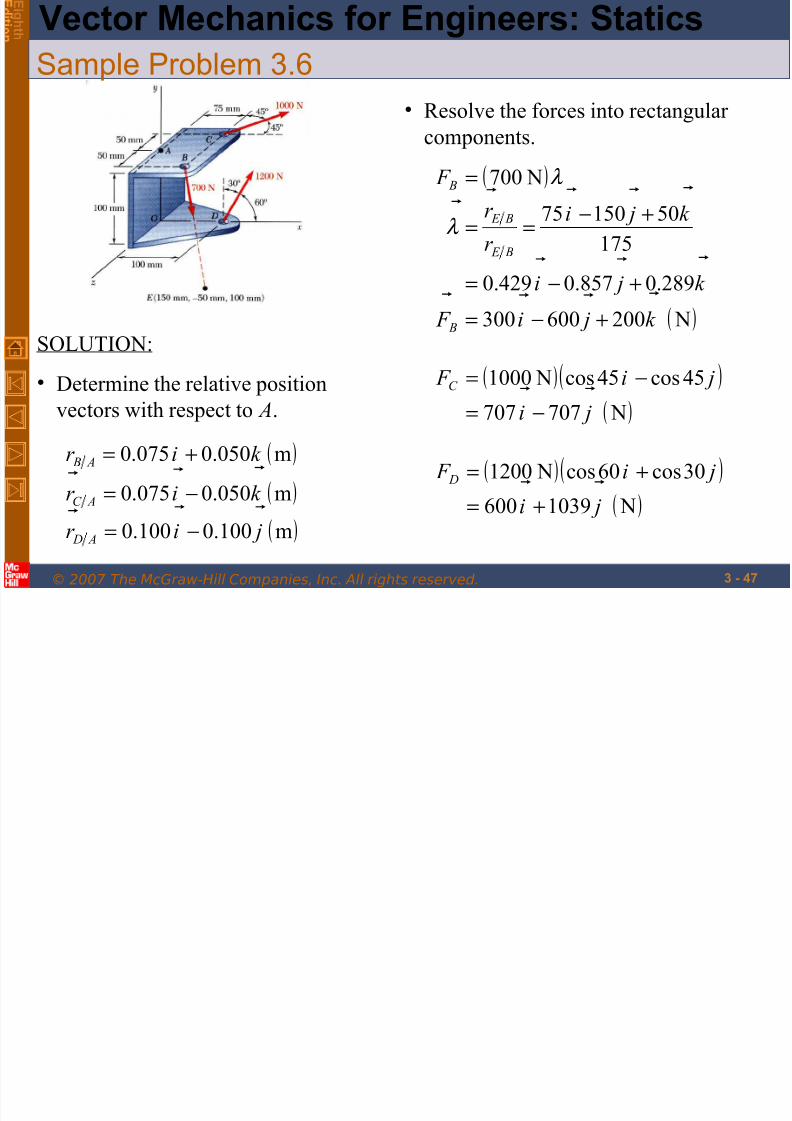
%ample Problem &'.
T"ree cables are attac"ed to t"e brac4et as s"own' #eplace t"e
forces wit" an equivalent force1
couple system at $'
%35@TI32:
. 6etermine t"e relative position vectors
for t"e points of application of t"e
cable forces wit" respect to $'
. #esolve t"e forces into rectanular
components'
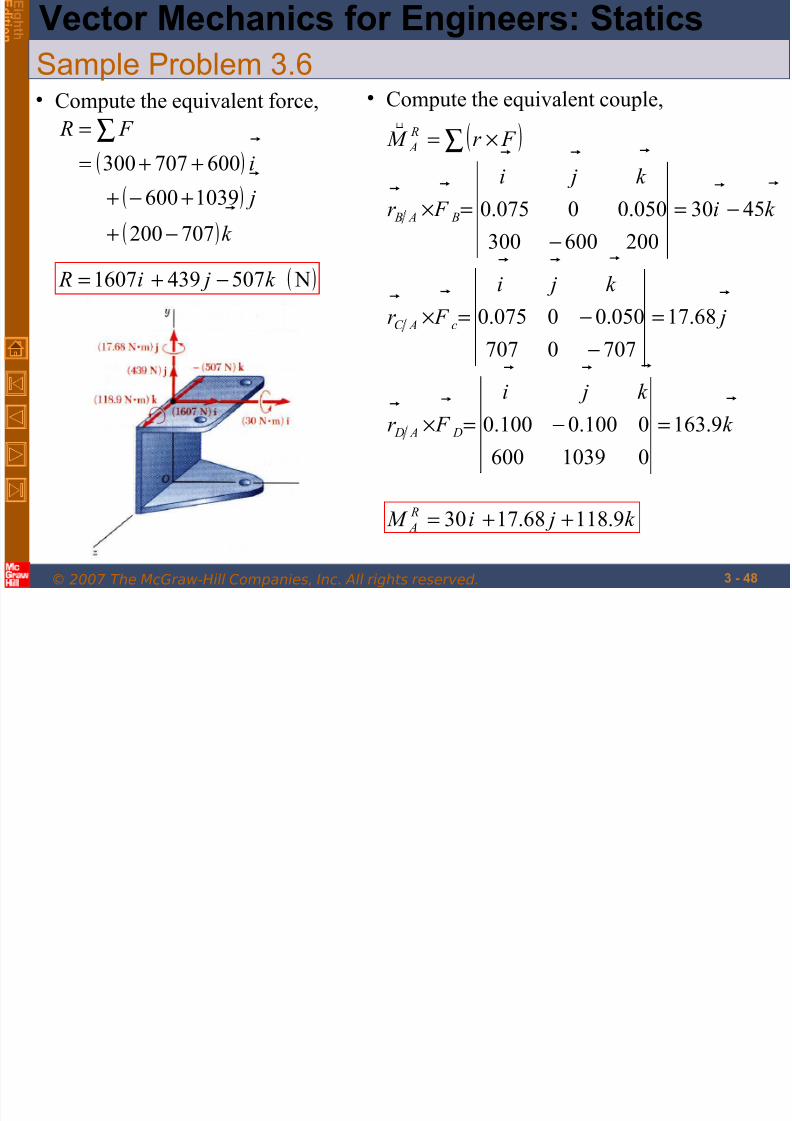
. $ompute t"e equivalent force/
∑= F -
. $ompute t"e equivalent couple/
( )∑ ×= F r - $
Vector Mechanics for Engineers: StaticsE i gh t
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 47/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
Vector Mechanics for Engineers: Staticsh
3 - 47
%ample Problem &'.
%35@TI32:
. 6etermine t"e relative position
vectors wit" respect to $'( )
( )
( )m(77'7(77'7
m7-7'77>-'7
m7-7'77>-'7
jir
k ir
k ir
$ )
$(
$ #
−=
−=
+=
. #esolve t"e forces into rectanular
components'( )
( ) 2 *77;77&77
*='7=->'7,*'7
(>-
-7(-7>-
2>77
k ji F
k ji
k ji
r
r
F
#
# /
# /
#
+−=+−=
+−==
=
λ
λ
( ) ( )
( ) 2 (7&;77
&7cos;7cos 2(*77
ji
ji F )
+=
+=
( ) ( )
( ) 2 >7>>7>
,-cos,-cos 2(777
ji
ji F (
−=
−=
Vector Mechanics for Engineers: StaticsE i gh t h
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 48/76
© 2007 The McGraw-Hill Companies, Inc. All rights reserve.
ecto ec a cs o g ee s Stat csh
3 - 48
%ample Problem &'.. $ompute t"e equivalent force/
( )
( )
( )k
j
i
F -
>7>*77
(7&;77
;77>7>&77
−+
+−+
++=
=∑
( ) 2 -7>,&(;7> k ji - −+=
. $ompute t"e equivalent couple/
( )
k
k ji
F r
j
k ji
F r
k i
k ji
F r
F r
) $ )
c $(
# $ #
-
$
'(;&
7(7&;77
7(77'7(77'7
;='(>
>7>7>7>
7-7'777>-'7
,-&7
*77;77&77
7-7'777>-'7
=−=×
=
−
−=×
−=
−
=×
×=∑
k ji - $ '((=;='(>&7 ++=

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 49/76
,/
Problem &'0
T$e (-1ft boom $# $as a fixed
end $' " steel cable is stretc$ed
from t$e free end # of t$e boom
to a point ( located on t$e
vertical wall' If t$e tension in t$e
cable is -02 lb3 determine t$e
moment about $ of t$e force
exerted by t$e cable at #'
(
#
$
x
y
z
(- ft
; ft(7 ft
( y Problem &'0

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 50/76
-2
(' Determine the rectangular components of a force defined by
its magnitude and direction. If t$e direction of t$e force isdefined by two points located on its line of action3 t$e force can
be expressed by:
F F λ Bd x i D d y j D d z k F
d
(
#
$
x
y
z
(- ft
; ft(7 ft %olvin Problems on 4our 5wn
T$e (-1ft boom $# $as a fixed
end $' " steel cable is stretc$edfrom t$e free end # of t$e boom
to a point ( located on t$e
vertical wall' If t$e tension in t$e
cable is -02 lb3 determine t$e
moment about $ of t$e forceexerted by t$e cable at #'
( y Problem &'0

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 51/76
-(
)' Compute the moment of a force in three dimensions. If r is a
position vector and F is t$e force t$e moment M is iven by:
M r x F
(
#
$
x
z
(- ft
; ft(7 ft %olvin Problems on 4our 5wn
T$e (-1ft boom $# $as a fixed
end $' " steel cable is stretc$edfrom t$e free end # of t$e boom
to a point ( located on t$e
vertical wall' If t$e tension in t$e
cable is -02 lb3 determine t$e
moment about $ of t$e forceexerted by t$e cable at #'
Problem &'0 %olution(
y

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 52/76
-)
Determine the rectangular
components of a force defined
by its magnitude and direction.
First note:
d #( B (-* D B; * D B (7 *
d #( ( ft
T$en:
T #( B (- i D ; j (7 k B,-7 lb i D B(=7 lb j B&77 lbk ->7 lb
(
->7 2
(
#
$
x
z
(- ft
; ft(7 ft
Problem &'0 %olution(
y

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 53/76
-&
Compute the moment of a
force in three dimensions.
6ave:
M $ r #0$ x T #(
7$ere: r #0$ B(- ft i
T$en:
M $ (- i x B ,-7 i D (=7 j &77 k
M $
B,-77 lb'ft j D B*>77 lb'ft k
->7 2
(
#
$
x
z
(- ft
; ft(7 ft
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 54/76
-,
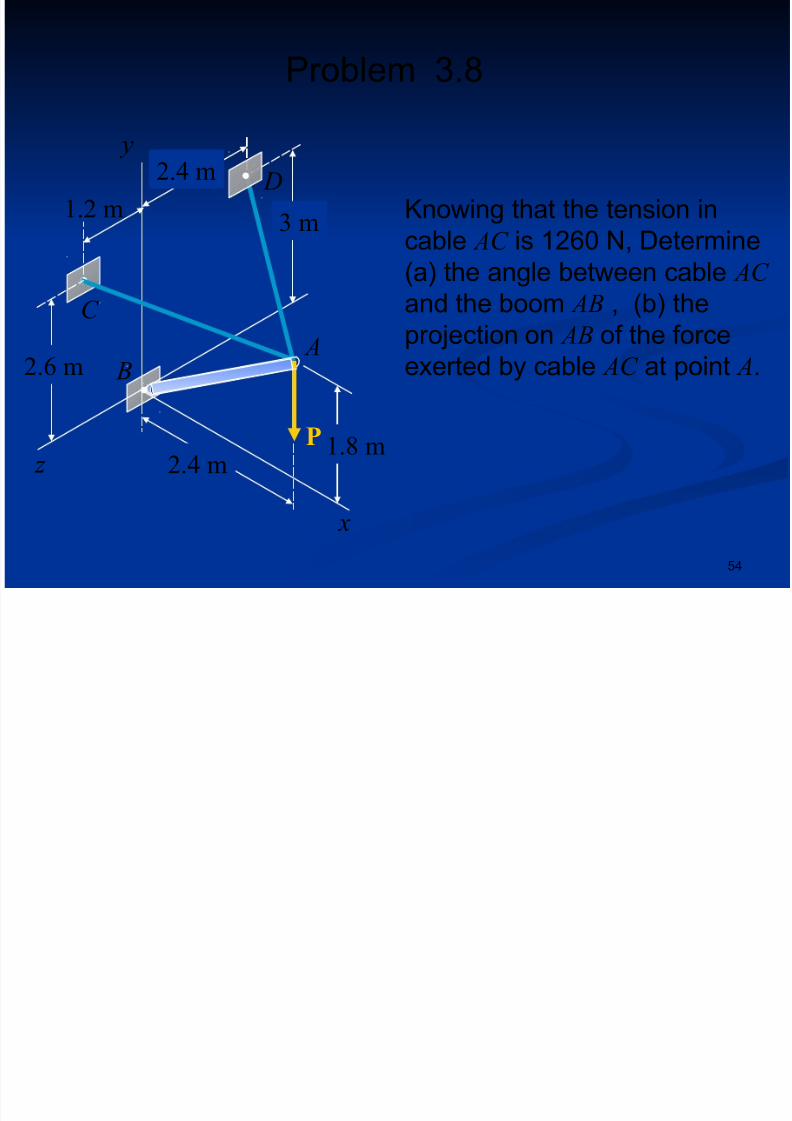
Problem &'8
9nowin t$at t$e tension in
cable $( is ().2 3 ;etermine
<a= t$e anle between cable $( and t$e boom $# 3 <b= t$e
pro>ection on $# of t$e force
exerted by cable $( at point $'
y
& m
*', m
('* m
*'; m
*', m z
x
$ #
(
)
('= mP
Problem &'8 y

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 55/76
--
(' Calculate the angle formed by two vectors. Express t$e vectors
in terms of t$eir components' T$e cosine of t$e desired anle is
obtained by dividin t$e scalar product of t$e two vectors by t$e
product of t$eir manitudes'
%olvin Problems on 4our 5wn
9nowin t$at t$e tension in
cable $( is ().2 3 ;etermine<a= t$e anle between cable $(
and t$e boom $# 3 <b= t$e
pro>ection on $# of t$e force
exerted by cable $( at point $'
& m
*', m
('* m
*'; m
*', m z
x
$ #
(
)
('= mP
Problem &'8 y
* ,

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 56/76
-.
)' Compute the projection of a vector P on a given line O+.Express t$e vector P and t$e unit vector
λ
in t$e direction of t$e
line in component form' T$e required pro>ection is equal to t$e
scalar product Pλ' If t$e anle θ formed by P and λ is ?nown3 t$e
pro>ection is also iven by P cos θ.
%olvin Problems on 4our 5wn
9nowin t$at t$e tension in
cable $( is ().2 3 ;etermine<a= t$e anle between cable $(
and t$e boom $# 3 <b= t$e
pro>ection on $# of t$e force
exerted by cable $( at point $'
& m
*', m
('* m
*'; m
*', m z
x
$ #
(
)
('= mP
Problem &'8 %olution y* ,
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 57/76
-0
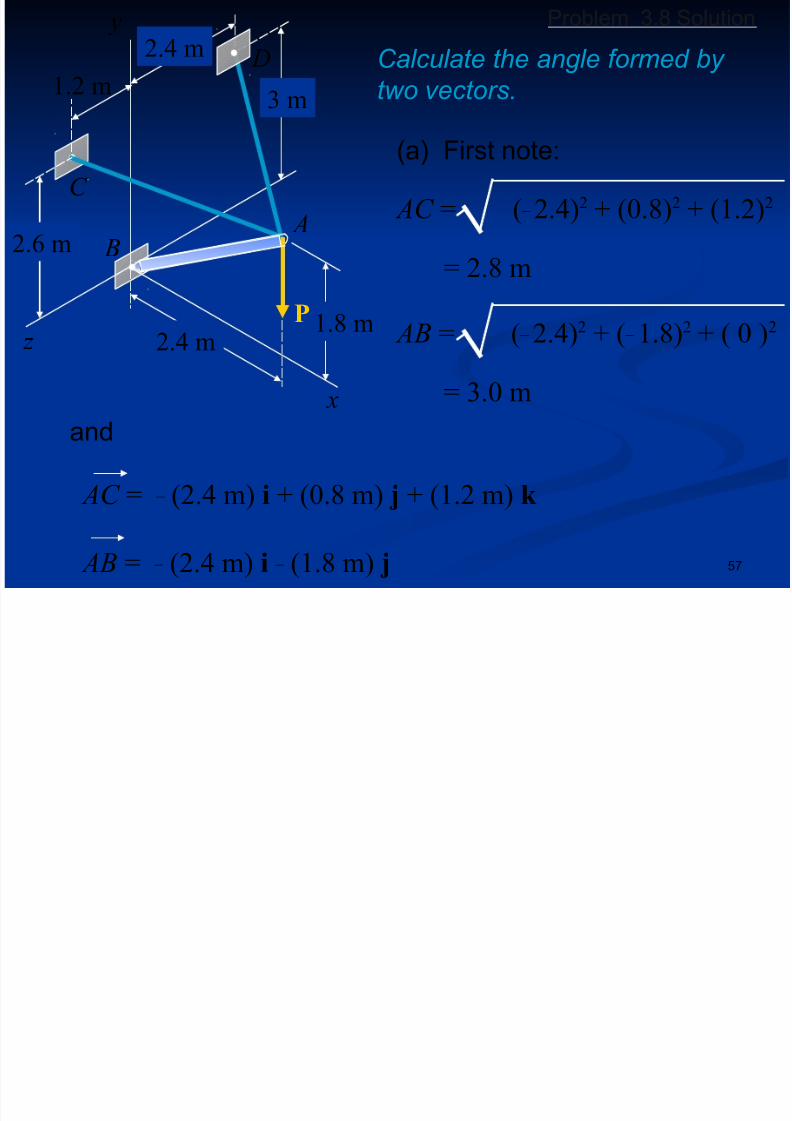
Calculate the angle formed by
two vectors.
<a= First note:
$( B *',* D B7'=* D B('**
*'= m
$# B *',* D B ('=* D B 7 *
&'7 m
$( B*', m i D B7'= m j D B('* m k
$# B*', m i B('= m j
and
& m
*', m
('* m
*'; m
*', m z
x
$ #
(
)
('= mP
Problem &'8 %olution y* ,

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 58/76
-8
+y definition:
$( $# B $( B $# cos θ
B *', i D 7'= j D ('* k B *', i ('= j B*'=B&'7 cos θ
B *',B *', D B7'=B ('= D B('*B7 =', cos θ
cos θ 7'-(,* θ -'(o
& m
*', m
('* m
*'; m
*', m z
x
$ #
(
)
('= mP
Problem &'8 %olution y* ,

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 59/76
-/
& m
*', m
('* m
*', m z
$ #
(
)Compute the projection of a
vector on a given line.
<b=
BT $( $# T $( λ
$#
T $( cos θ
B(*;7 2 B7'-(,*
BT $( $# ;,= 2
T $(
λ
$#
*'; m
x
('= mP

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 60/76
.2
Problem &'/
T$e frame $() is $ined at $
and ) and is supported by a
cable w$ic$ passes t$rou$ a
rin at # and is attac$ed to
$oo?s at , and 1 ' 9nowin
t$at t$e tension in t$e cable is
,-2 3 determine t$e moment
about t$e diaonal $) of t$e
force exerted on t$e frame byportion #1 of t$e cable'
y
z
x
7'=>- m
7'>- m
7 '- m
7 '- m
7'&- m
7'*- m
$
#
O
( )
P
1
,
7'>- m
y7'&- m
Problem &'/

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 61/76
.(
(' Determine the moment MO+ of a force about a given axis O+.
MO+ is defined as
MO+ λ
MO λ
B r x F
w$ereλ
is t$e unit vector alon O+ and r is a position vector from
z x
7'=>- m
7'>- m
7 '- m
7 '- m
7'*- m
$
#
O
( )
P
1
,
7'>- m
%olvin Problems on 4our 5wn
T$e frame $() is $ined at $
and ) and is supported by acable w$ic$ passes t$rou$ a
rin at # and is attac$ed to
$oo?s at , and 1 ' 9nowin
t$at t$e tension in t$e cable is
,-2 3 determine t$e momentabout t$e diaonal $) of t$e
force exerted on t$e frame by
portion #1 of t$e cable'

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 62/76
Problem &'/ %olution y7'&- m

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 63/76
.&
$) λ $) B r #0$ x T #1
$) 2
(
-
, 7 &
7'- 7 7(-7 &77
&77
GB &B7'-B&77H
(
-
$) 2 7 2m
Finally:
$)
z
7'=>- m
7'>- m
7 '- m 7 '- m
7'*- m
$
#
O
( )
P
1
,
T #1 $)
r #0$ x
7'>- m
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 64/76
.,
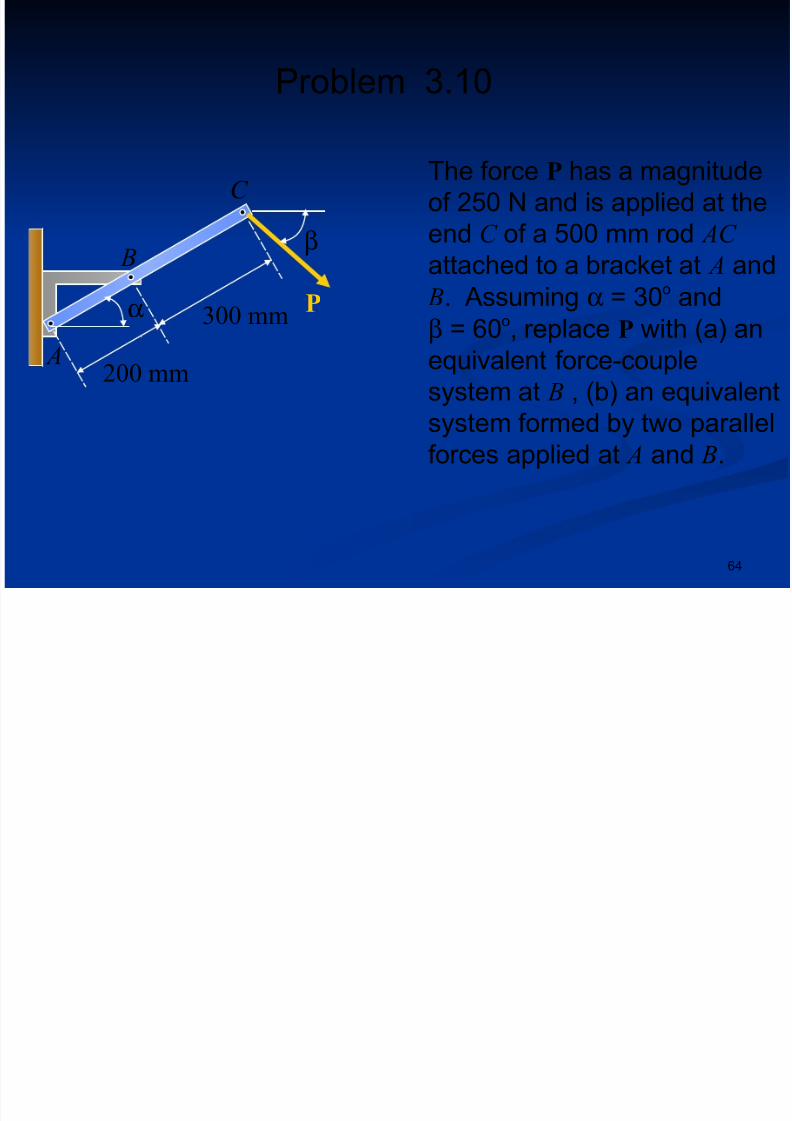
Problem &'(2
T$e force P $as a manitude
of )-2 and is applied at t$e
end ( of a -22 mm rod $(
attac$ed to a brac?et at $ and
#' "ssumin α @ &2o and
β @ .2o3 replace P wit$ <a= an
equivalent force1couple
system at # 3 <b= an equivalent
system formed by two parallelforces applied at $ and #'
α
β
P
(
#
$*77 mm
&77 mm
Problem &'(2
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 65/76
.-
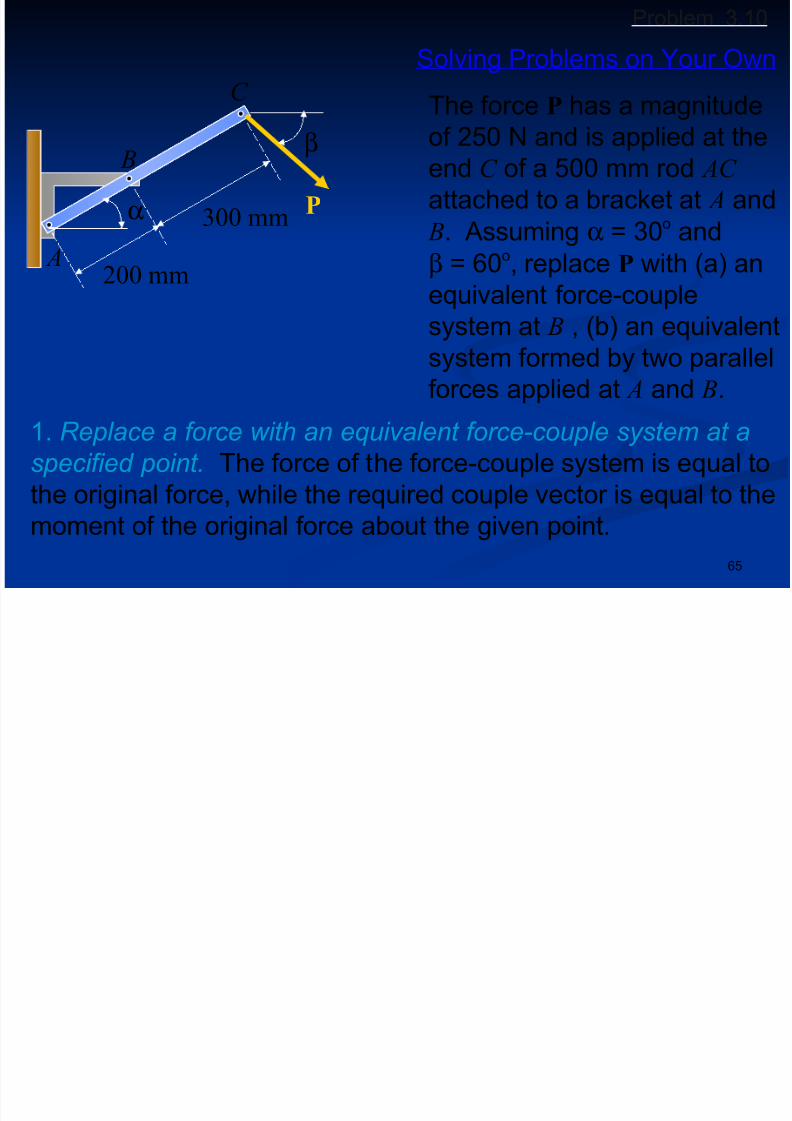
%olvin Problems on 4our 5wn
T$e force P $as a manitude
of )-2 and is applied at t$eend ( of a -22 mm rod $(
attac$ed to a brac?et at $ and
#' "ssumin α @ &2o and
β @ .2o3 replace P wit$ <a= an
equivalent force1couplesystem at # 3 <b= an equivalent
system formed by two parallel
forces applied at $ and #'
(' Replace a force with an equivalent force-couple system at aspecified point. T$e force of t$e force1couple system is equal to
t$e oriinal force3 w$ile t$e required couple vector is equal to t$e
moment of t$e oriinal force about t$e iven point'
α
β
P
(
#
$
*77 mm
&77 mm
Problem &'(2 %olution(

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 66/76
..
α
β
P
#
$*77 mm
&77 mm
Replace a force with an equivalent
force-couple system at a specified
point.
<a= Equivalence requires:
Σ F : F P or F *-7 2 ;7o
Σ M # : M B7'& mB*-7 2 >- 2
T$e equivalent force couple system at # is:
F *-7 2 ;7o/ M >- 2 m
Problem &'(2 %olution(
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 67/76
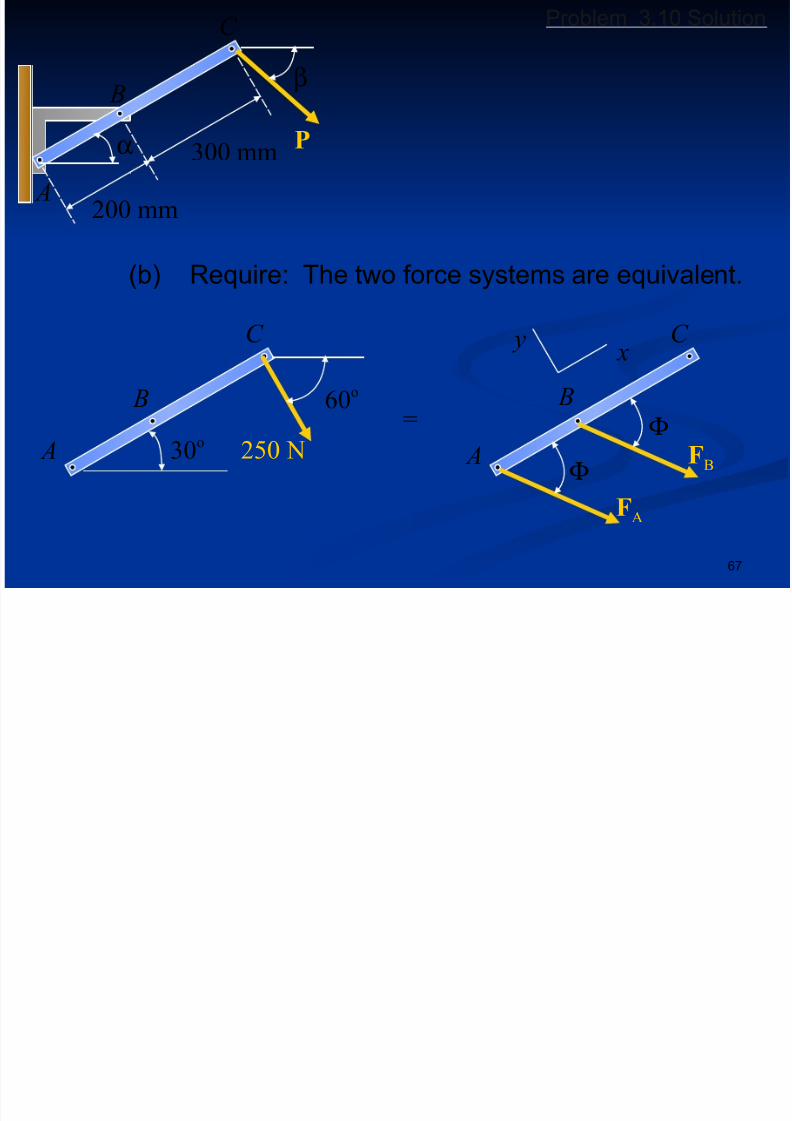
.0
<b= Require: T$e two force systems are equivalent'
α
β
P
#
$*77 mm
&77 mm
#
$
(
;7o
*-7 2&7o
Φ
Φ
(
#
$ F+
FA
x y
Problem &'(2 %olution
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 68/76
.8
#
$
(
;7o
*-7 2&7o
Φ
Φ
(
#
$ F+
FA
x y
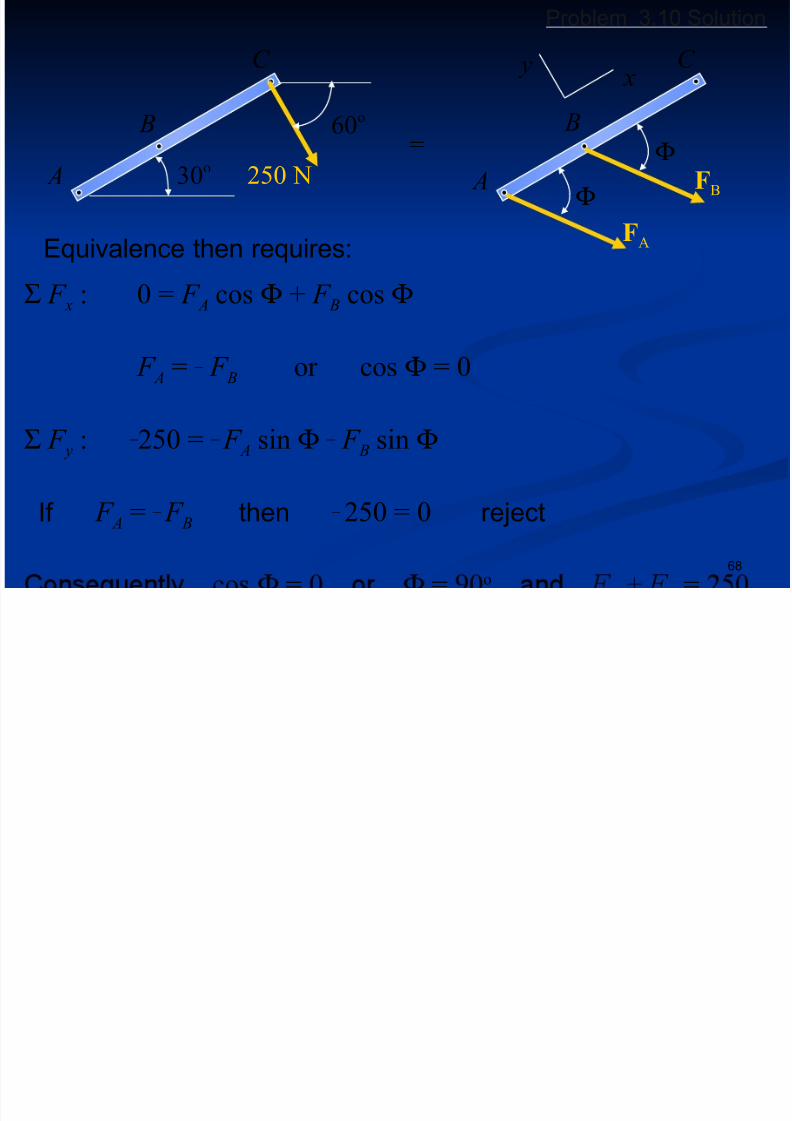
Equivalence t$en requires:
Σ F x : 7 F $ cos Φ D F # cos Φ
F $ F # or cos Φ 7
Σ F y : *-7 F $ sin Φ F # sin Φ
If F $ F # t$en *-7 7 re>ect
o
Problem &'(2 %olution

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 69/76
./
#
$
(
;7o
*-7 2&7o
Φ
Φ
(
#
$ F+
FA
x y
"lso:Σ # : B7'& mB *-7 2 B7'* m F $
or F $ &>- 2
and F # D ;>- 2
F $ &>- 2 ;7o/ F # ;*- 2 ;7o
D

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 70/76
02
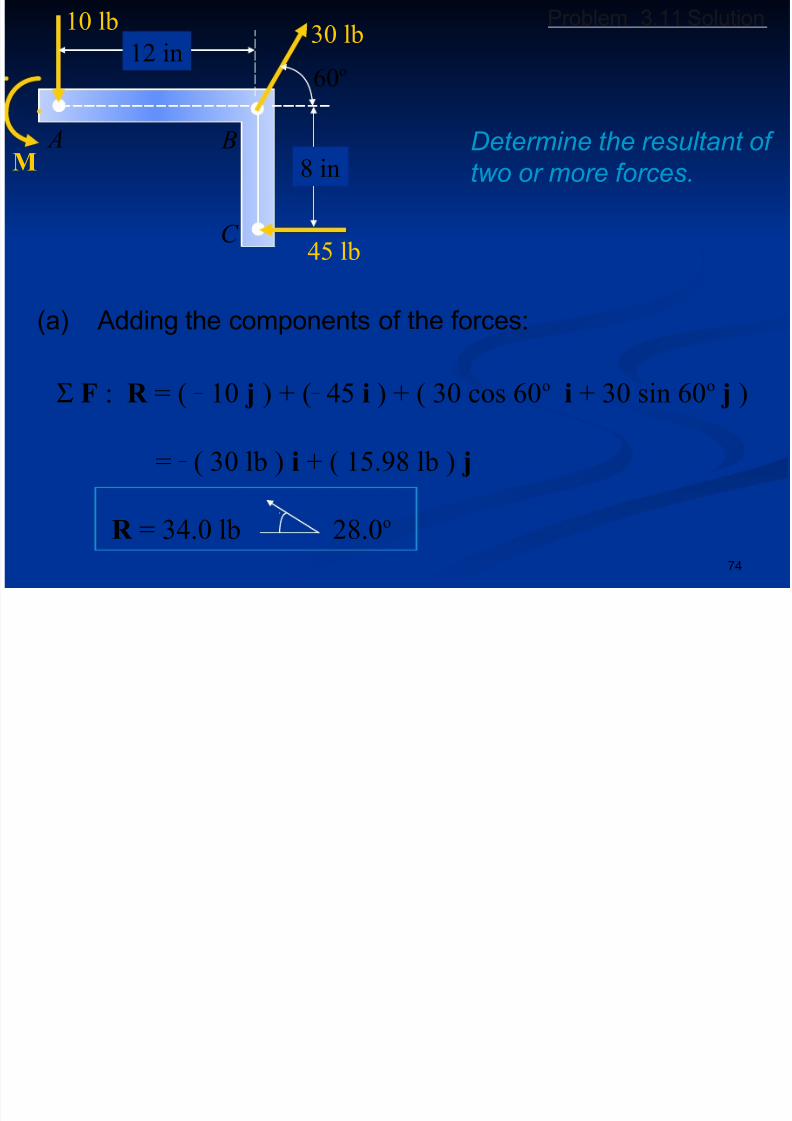
Problem &'((
M $ #
(
(* in
= in
;7o
,- lb
&7 lb(7 lb " couple of manitude
@ -, lbin' and t$e t$ree
forces s$own are applied to
an anle brac?et' <a= Find t$e
resultant of t$is system of
forces' <b= Aocate t$e points
w$ere t$e line of action of t$e
resultant intersects line $# and line #( '
%olvin Problems on 4our 5wn
Problem &'((

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 71/76
0(
M $ #
(
(* in
= in
;7o
,- lb
&7 lb(7 lb
(' Determine the resultant of two or more forces. ;etermine t$erectanular components of eac$ force' "ddin t$ese components
will yield t$e components of t$e resultant'
%olvin Problems on 4our 5wn
" couple of manitude
@ -, lb
in' and t$e t$reeforces s$own are applied to
an anle brac?et' <a= Find t$e
resultant of t$is system of
forces' <b= Aocate t$e points
w$ere t$e line of action of t$e
resultant intersects line $#
and line #( '
%olvin Problems on 4our 5wn
Problem &'((

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 72/76
0)
M $ #
(
(* in
= in
;7o
,- lb
&7 lb(7 lb
)' Reduce a force system to a force and a couple at a given point.
T$e force is t$e resultant R of t$e system obtained by addin t$e
various forces' T$e couple is t$e moment resultant of t$e system
M3 obtained by addin t$e moments about t$e point of t$e various
forces'
R Σ F M Σ B r x F
%olvin Problems on 4our 5wn
" couple of manitude
@ -, lb
in' and t$e t$reeforces s$own are applied to
an anle brac?et' <a= Find t$e
resultant of t$is system of
forces' <b= Aocate t$e points
w$ere t$e line of action of t$e
resultant intersects line $#
and line #( '
%olvin Problems on 4our 5wn
Problem &'((

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 73/76
0&
M $ #
(
(* in
= in
;7o
,- lb
&7 lb(7 lb
&' Reduce a force and a couple at a given point to a single force.
T$e sinle force is obtained by movin t$e force until its momentabout t$e point < $= is equal to t$e couple vector M $' " position
vector r from t$e point3 to any point on t$e line of action of t$e
sinle force R must satisfy t$e equation
r x R M $
-
-
%olvin Problems on 4our 5wn
" couple of manitude
@ -, lb
in' and t$e t$reeforces s$own are applied to
an anle brac?et' <a= Find t$e
resultant of t$is system of
forces' <b= Aocate t$e points
w$ere t$e line of action of t$e
resultant intersects line $#
and line #( '
8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 74/76
Problem &'(( %olution
(* in&7 lb
(7 lb

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 75/76
0-
M $ #
(
(* in
= in
;7o
,- lb
Reduce a force system to
a force and a couple at agiven point.
<b= First reduce t$e iven forces and couple to an equivalent
force1couple system <R / M #= at #'
Σ # : # B -, lbin D B (* in B(7 lb B = in B ,- lb
(=; lbin
D
Problem &'(( %olutiona

8/9/2019 Ch03 Rigid Bodies Equivalent Systems of Forces
http://slidepdf.com/reader/full/ch03-rigid-bodies-equivalent-systems-of-forces 76/76
Reduce a force and a couple
at a given point to a single force.
$ #
(
c
R
)
/
7it$ R at ):
Σ # : (=; lbin a B (-'=7= lb or a ((';, in
and wit$ R at /
Σ # : (=; lbin c B &7 lb or c ;'*7 inT$e line of action of R intersects line $# (('., in' to t$e left of #
d i t t li #( . )2 i b l #
D
D