cecs.wright.educecs.wright.edu/~sthomas/motorpropeller.docx · web viewwright state university,...
TRANSCRIPT
Wright State University, Department of Mechanical and Materials Engineering
ME 495: THERMAL-FLUID SCIENCE LABORATORY
Small UAV Motor/Propeller Performance
Objective:Determine the efficiency, advance ratio, and coefficients of thrust and power for a
motor/propeller used on a small unmanned aerial vehicle.
Method: Use the Wright State University low speed wind tunnel and National Instruments data
acquisition system running LabVIEW to collect thrust, torque, rotational speed, and temperature data at several airspeeds.
Procedure: With the system connected to the data acquisition board, supply 11.1VDC to the speed
controller. Set the wind tunnel frequency to 2.5 Hz, which determines the airspeed. Set the motor to 90% throttle using the servo tester. Allow the motor to reach steady state temperature using the derivative plot in the LabVIEW virtual instrument. Once the motor has achieved steady state, collect 500 data points at a rate of 2 Hz. When finished, increase the wind tunnel velocity by 2.5 Hz and use the servo tester to match the rotational speed from the previous run. Once the motor has achieved steady state, collect data and repeat until the wind tunnel frequency is 25 Hz. Repeat this procedure for a different rotational speed setting if time allows. Follow the guidelines for the report below. Make sure to check units when calculating advance ratio, efficiency, coefficient of thrust, and coefficient of torque.
Data to be Collected:1. Thrust, torque, motor temperature, air temperature, rotational speed, current, voltage,
differential pressure from the Pitot tube, and atmospheric pressure. Current will be collected by hand by reading from the clamp-around ammeter. This will only need to be done once per wind tunnel setting.
Report:1. Title page.2. Plots of thrust, torque, air temperature, RPM, and differential pressure versus time. 3. Plot efficiency vs. advance ratio using average values for each airspeed. 4. Plot coefficient of thrust and coefficient of power versus advance ratio. These can be
done on the same plot using a secondary axis. 5. Perform an uncertainty analysis on efficiency, advance ratio, coefficient of thrust, and
coefficient of power. This will be done similarly to previous labs. Values of uncertainty can be found in the manual for the components or are given in this handout.
6. Sample hand calculations showing the uncertainty analysis. Be sure to include units. All of these values are nondimensional.
7. Discussion:
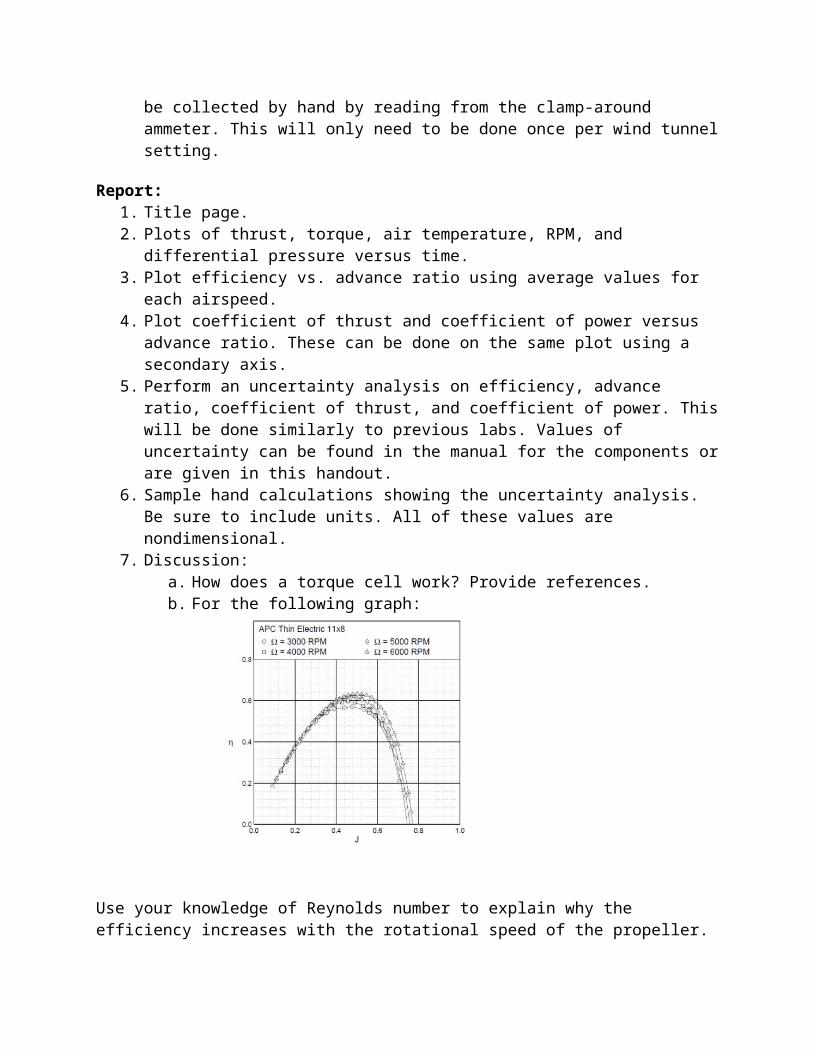
a. How does a torque cell work? Provide references.b. For the following graph:
Use your knowledge of Reynolds number to explain why the efficiency increases with the rotational speed of the propeller.
SAFETY!When running tests, pay careful attention to the temperature of the motor to make sure
that the motor does not get over 60°C. Any temperature over this limit could potentially damage the motor. Do not run the motor with the wind tunnel open. The propeller could break and send shards at high velocity toward personnel. When opening the wind tunnel, turn off the power supply to make sure the motor is off. Make sure all wires are clear of the propeller and not interfering with the load cells. Clean all debris from the test section before running to prevent damage to the fan. Do not cross behind the fan during experiments.
Background:Recently there has been a major push in the development of unmanned air vehicles
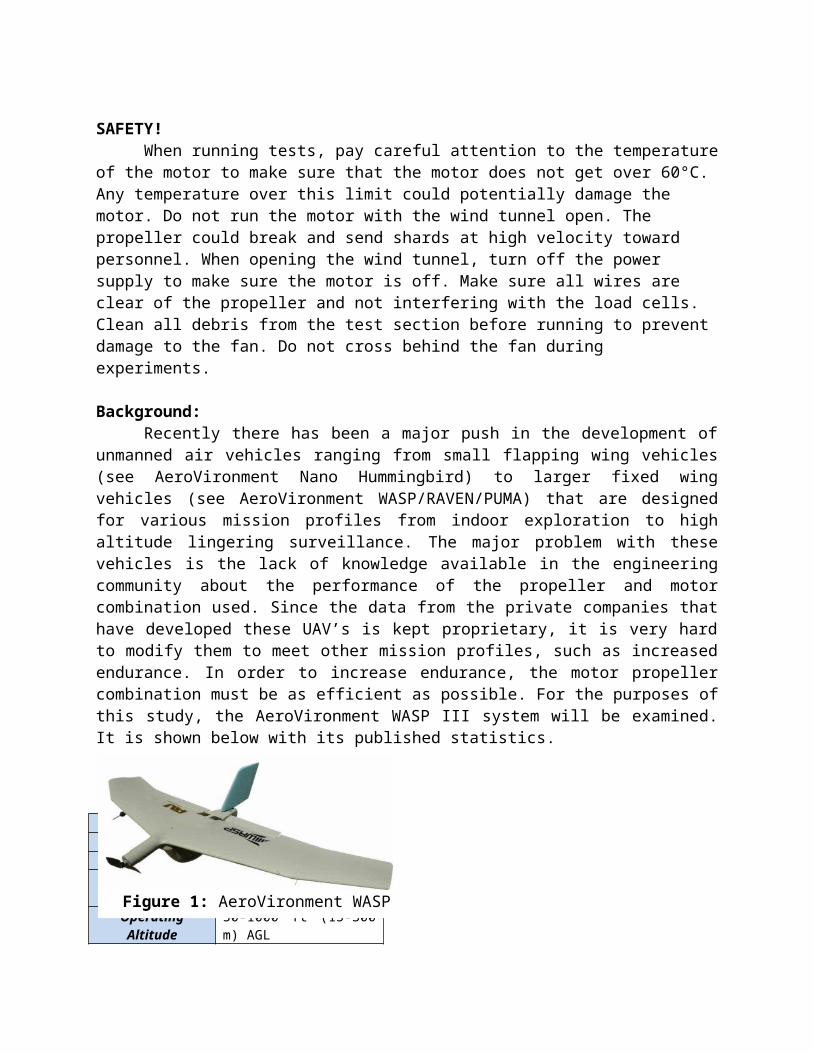
ranging from small flapping wing vehicles (see AeroVironment Nano Hummingbird) to larger fixed wing vehicles (see AeroVironment WASP/RAVEN/PUMA) that are designed for various mission profiles from indoor exploration to high altitude lingering surveillance. The major problem with these vehicles is the lack of knowledge available in the engineering community about the performance of the propeller and motor combination used. Since the data from the private companies that have developed these UAV’s is kept proprietary, it is very hard to modify them to meet other mission profiles, such as increased endurance. In order to increase endurance, the motor propeller combination must be as efficient as possible. For the purposes of this study, the AeroVironment WASP III system will be examined. It is shown below with its published statistics.
Table 1: AV WASP III Published StatisticsWingspan 2.375 ft (72 cm)
Length 1.25 ft (38 cm)Weight 0.95 lb (430 grams)
Max Speed 40+ mi/hr (35+ knots)Operating Altitude 50-1000 ft (15-300 m) AGL
Payload High Res. Day/Night Camera
Figure 1: AeroVironment WASP
Several factors inherent in the design of the motor and propeller play an important role in the performance. The two major factors in the propeller are diameter and pitch. The pitch is defined as the distance the propeller will move forward in a perfect fluid during one revolution. Increasing the pitch is good for high speed flight, but leads to poor acceleration and climbing due to less thrust. Lower pitch is better for high speed flight. Generally, when changing pitch, the diameter will also be changed in the opposite direction. The way the propeller is driven can also be of interest. The propeller can be driven directly (high torque, low rotational speed out-runner DC motors, or fuel engines) or driven through a gear reduction (common with high rotational speed in-runner DC motors). The DC brushless motor is very common in the RC hobby community today. It offers much higher efficiency, performance, and does not suffer from mechanical wear seen in the older style brushed motors. Brushless motors come in two forms, in-runners and out-runners. In-runners have the permanent magnet as part of the rotor, while in an out-runner the permanent magnets rotate around the core and generally have higher torque at less speed than in-runners. The major distinguishing factor in motor performance, besides size, is the KV rating, or motor velocity constant. It is defined as the ratio of unloaded rotational speed to the peak voltage supplied to the coils. For example, the 2300 KV GWS in-runner DC motor used in the experiment supplied with 11.1 V will run at a nominal 25530 RPM. Higher KV motors can deliver the same power using a smaller propeller spinning at higher RPM than a lower KV. Usually the trade off with higher KV motors is increased heat generated. Since all the motor properties of the WASP are unknown besides that it is a 20mm in-runner, a GWS 20mm 2300 KV model was selected to achieve the given stats and mission profile of the WASP. A 4.7 x 4.25 inch GWS propeller was selected to be very similar to the propeller on the WASP.
With the motor and propeller selected, it is necessary to determine what values to measure. The accepted way of showing propeller performance is by plotting the efficiency (η) versus the advance ratio (J). The advance ratio is the nondimensional ratio between the distance the airplane moves forward during one revolution and the diameter of the propeller. It is given by Equation 1 below.
J=u∞
nD(1)
In this equation, u∞ is the incoming freestream airflow velocity (m/s), n is the propeller rotational rate (rev/s), and D is the diameter (m). Since advance ratio requires incoming airflow, it is not valid in the static case and must be found using the wind tunnel. Efficiency is defined by Equation 2, where CT is the coefficient of thrust (Equation 3), and CP is the coefficient of power (Equation 4).
η=JCT
CP(2)
CT=T
ρ n3 D4 (3)
CP=P
ρ n4 D5 (4)
T is the thrust produced (N), P = τω is the power defined as torque multiplied by propeller rotational rate (rad/s), and ρ is the density of air. Air density is given by Equation 5, where Pabs is the atmospheric pressure (recorded using the barometer in the wind tunnel), Rsp is the specific gas constant of dry air, and T is the absolute temperature of the airflow.
ρ=Pabs
Rsp T(5)
The air density is also used in Bernoulli’s equation to find the freestream airspeed. The equation is solved for velocity and is shown below in Equation 6.
u∞=√ 2 ∆ Pρ
(6)
Here ΔP is the differential pressure which is found using a Pitot tube, which is connected to a differential pressure manometer (transducer).
Procedure Background: Looking at these equations, it should become apparent that rotational speed, thrust, and
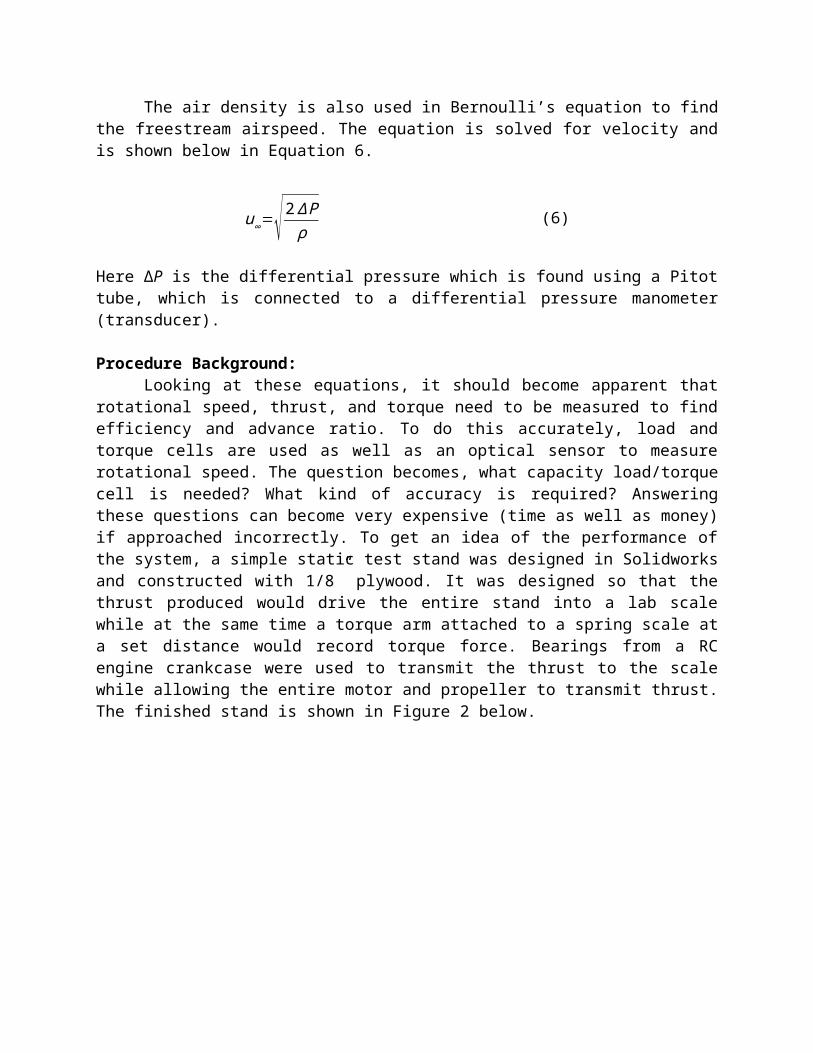
torque need to be measured to find efficiency and advance ratio. To do this accurately, load and torque cells are used as well as an optical sensor to measure rotational speed. The question becomes, what capacity load/torque cell is needed? What kind of accuracy is required? Answering these questions can become very expensive (time as well as money) if approached incorrectly. To get an idea of the performance of the system, a simple static test stand was designed in Solidworks and constructed with 1/8” plywood. It was designed so that the thrust produced would drive the entire stand into a lab scale while at the same time a torque arm attached to a spring scale at a set distance would record torque force. Bearings from a RC engine crankcase were used to transmit the thrust to the scale while allowing the entire motor and propeller to transmit thrust. The finished stand is shown in Figure 2 below.
Figure 2: Motor Connection to Stand (Left), Test Stand, Front View (Center), Test Stand, Top View (Right)
To measure rotational speed on the static stand, a hobby tachometer was used. It works by reading the rate that shadows produced by the propeller pass over the sensor. Temperature was measured using a type T thermocouple placed at the center of the motor. Temperature is important to make sure that the motor is not overheated (limit set at 60°C). Current was measured using a clamp-on ammeter and the voltage was measured with a hand-held digital voltmeter. All the readouts were placed in view of a camcorder and recorded during the tests. They were then played back and manually entered into Excel. Figure 3 shows a full throttle test for thrust of three propellers using an 11.1V battery.
Figure 3: Thrust vs. Time for Various Propellers
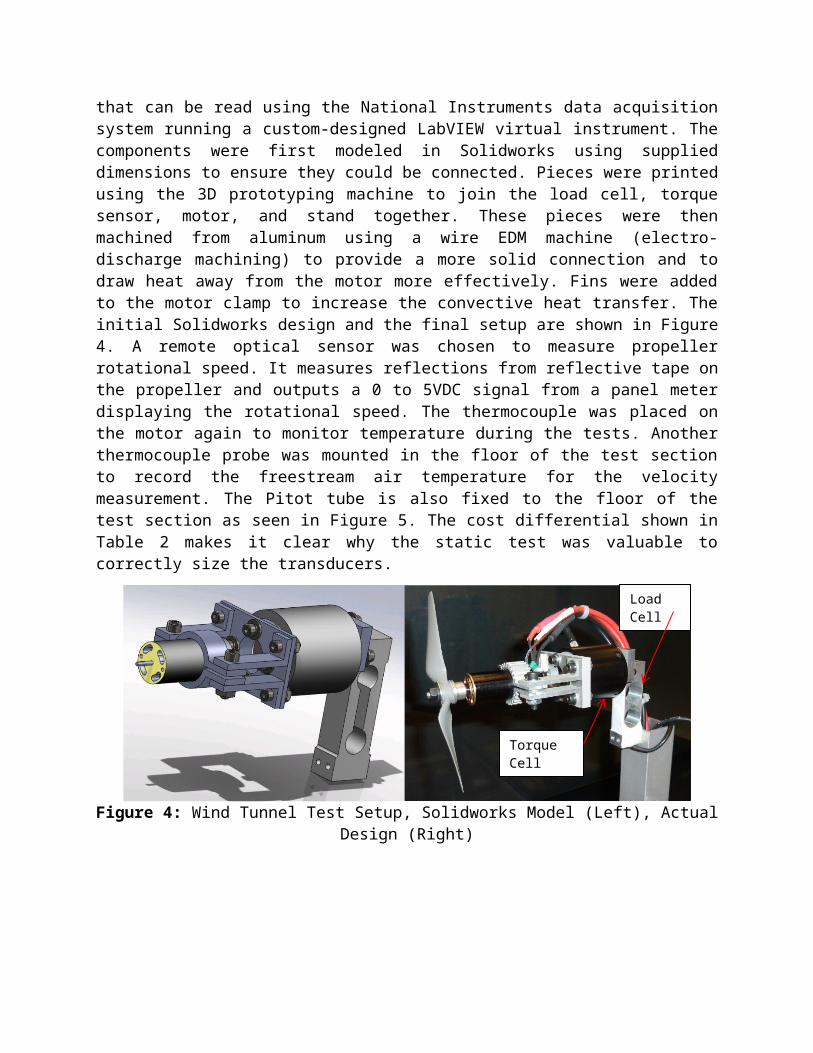
After running the static test, maximum values for thrust and torque were found. These allowed for the proper selection of load and torque cells for use in the wind tunnel. A 1-kg beam load cell is employed for thrust and a 25-oz-in reaction torque sensor was selected. Both offer high accuracy and allow for measurement of 1% of the maximum expected value. These are connected to signal conditioners that convert the signal to a 0 to 5VDC output that can be read using the National Instruments data acquisition system running a custom-designed LabVIEW virtual instrument. The components were first modeled in Solidworks using supplied dimensions to ensure they could be connected. Pieces were printed using the 3D prototyping machine to join the load cell, torque sensor, motor, and stand together. These pieces were then machined from aluminum using a wire EDM machine (electro-discharge machining) to provide a more solid connection and to draw heat away from the motor more effectively. Fins were added to the motor clamp to increase the convective heat transfer. The initial Solidworks design and the final setup are shown in Figure 4. A remote optical sensor was chosen to measure propeller rotational speed. It measures reflections from reflective tape on the propeller and outputs a 0 to 5VDC signal from
a panel meter displaying the rotational speed. The thermocouple was placed on the motor again to monitor temperature during the tests. Another thermocouple probe was mounted in the floor of the test section to record the freestream air temperature for the velocity measurement. The Pitot tube is also fixed to the floor of the test section as seen in Figure 5. The cost differential shown in Table 2 makes it clear why the static test was valuable to correctly size the transducers.
Figure 4: Wind Tunnel Test Setup, Solidworks Model (Left), Actual Design (Right)
Figure 5: Complete Test Setup
Thermocouple for freestream temperature
Pitot Tube
Remote Optical Sensor
Load Cell
Torque Cell
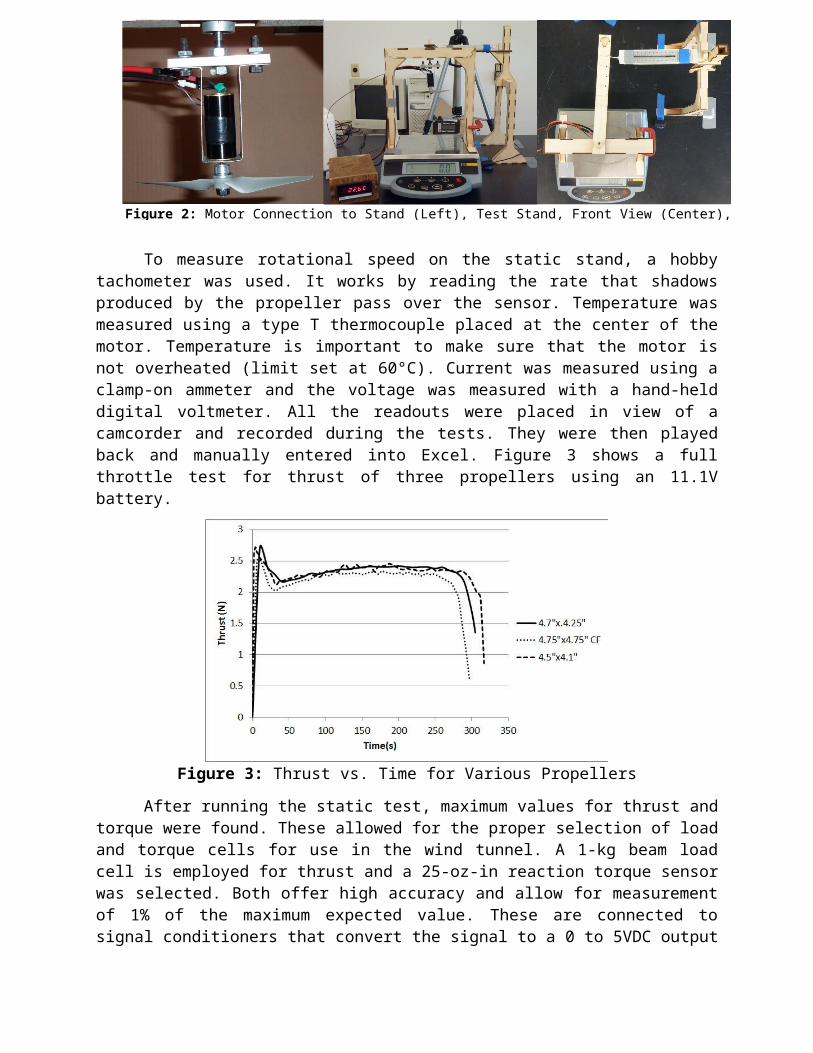
Table 2: Cost Differential Between TestsStatic Test Wind Tunnel Test
1/8” Plywood $4.00 1 Kg Load Cell $99.00Engine Crankcase Free 25 oz-in Torque Sensor $787.50
Spring Scale $19.80 2 Signal Conditioners $441.00Lab Scale WSU 2 Enclosures $270.00
Hobby Tachometer $36.95 2 Power Adapters $66.00Clamp On Ammeter WSU Shunt Resistor $44.48
Voltmeter WSU Special Hardware $15.00Aluminum Support WSU
Remote Optical Sensor $595.97Digital Multimeter $1299.00
Differential Pressure Trans. $836.35Pitot Tube WSUBarometer $883.50
Air Flow Thermocouple $55.00Total $60.75 Total 5392.8
Each measurement device was calibrated to convert the 0 to 5VDC output to a useful value. The torque cell was calibrated by hanging weights at the end of a torque arm and recording the output. The optical sensor output was compared to the calibrated readout on the panel meter by recording video of the panel meter and manually entering the value into Excel and comparing it to the voltage output. The load cell was calibrated as follows. A rod supported by bearings was placed in front of the stand and wire was strung over the top of the rod and connected to the motor on one end and a weight set suspended outside of the flow on the other end. This allowed a force to be placed on the load cell with the torque cell and motor in place. The differential pressure manometer and barometer were calibrated at the factory. The thermocouples were calibrated using methods from the previous lab. The calibration equations for all of the components are already built into the LabVIEW virtual instrument.
To perform the uncertainty analysis on advance ratio, efficiency, coefficient of thrust, and coefficient of power, the accuracy of the transducers are needed. These are available from the manufacturers’ specifications, but some are presented below in Table 3.
Table 3: Accuracy of Measurement DevicesMeasurement Device
(Order Code) Company Accuracy
LSP-1 Load Cell Transducer Techniques 0.05% of Full ScaleRTS-25 Torque Cell Transducer Techniques 0.05% of Full Scale226A Manometer
(226A05TBBBBSU7T1) MKS Use order code to find this out
PTB 100 Barometer(PTB1101A0AB) Vaisala See References
ACT-3X Panel Tachometer Monarch Instruments 0.001% of ReadingType E Thermocouple Omega ±0.03 Deg C
References:AeroVironment WASP III Air Force Fact Sheet: http://www.avinc.com/downloads/USAirForceFactSheet.pdf
Brandt, J. B., and Selig, M. S. Propeller Performance Data at Low Reynolds Numbers, AIAA Paper 2011-1255, 49th Aerospace Sciences Meeting, 4-7 January 2011, Orlando, FL. http://www.ae.illinois.edu/m-selig/pubs/BrandtSelig-2011-AIAA-2011-1255-LRN-Propellers.pdf
Load Cell Information: http://www.transducertechniques.com/lsp-load-cell.cfm
Torque Cell Information: http://www.transducertechniques.com/rts-torque-sensor.cfm
Panel Tachometer Information: http://www.instrumart.com/assets/108/ACT3X-Datasheet.pdf
Differential Pressure Manometer Information: http://www.mksinst.com/product/product.aspx?ProductID=1192
Barometer Information: http://www.vaisala.com/en/products/pressure/Pages/PTB110.aspx