cava 1.30.x whats new -...
TRANSCRIPT

1
CAVA 1.30.x – Whats NewJan-2017
2
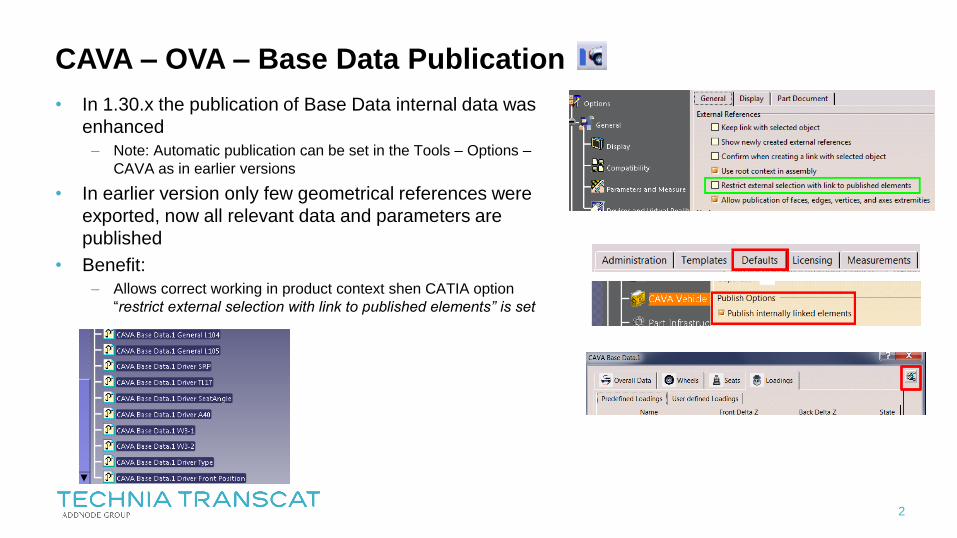
CAVA – OVA – Base Data Publication
• In 1.30.x the publication of Base Data internal data was
enhanced
– Note: Automatic publication can be set in the Tools – Options –
CAVA as in earlier versions
• In earlier version only few geometrical references were
exported, now all relevant data and parameters are
published
• Benefit:
– Allows correct working in product context shen CATIA option
“restrict external selection with link to published elements” is set
3
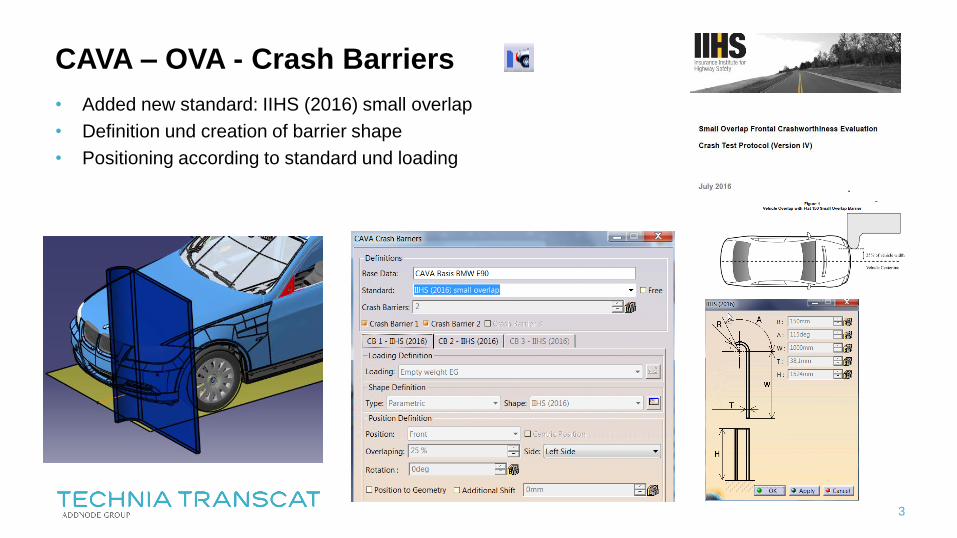
CAVA – OVA - Crash Barriers
• Added new standard: IIHS (2016) small overlap
• Definition und creation of barrier shape
• Positioning according to standard und loading
4
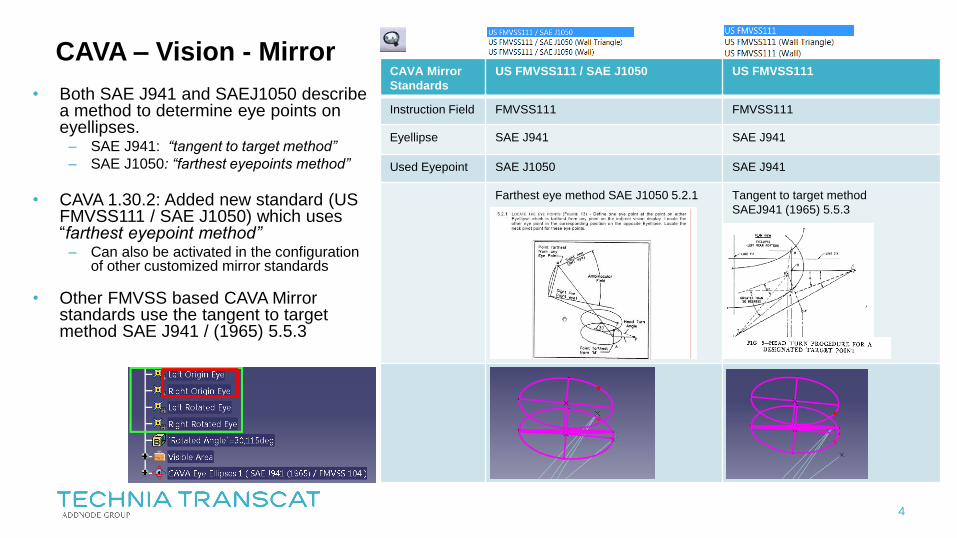
CAVA Mirror
Standards
US FMVSS111 / SAE J1050 US FMVSS111
Instruction Field FMVSS111 FMVSS111
Eyellipse SAE J941 SAE J941
Used Eyepoint SAE J1050 SAE J941
Farthest eye method SAE J1050 5.2.1 Tangent to target method
SAEJ941 (1965) 5.5.3
CAVA – Vision - Mirror
• Both SAE J941 and SAEJ1050 describe a method to determine eye points on eyellipses.
– SAE J941: “tangent to target method”
– SAE J1050: “farthest eyepoints method”
• CAVA 1.30.2: Added new standard (US FMVSS111 / SAE J1050) which uses “farthest eyepoint method”
– Can also be activated in the configuration of other customized mirror standards
• Other FMVSS based CAVA Mirror standards use the tangent to target method SAE J941 / (1965) 5.5.3

5
CAVA - Vision– Close Range Visibility
• Added support of FMVSS 111 NPRM cylinder
configuration for rear view cameras
– Creates rear camera vision cone
– Check and Show 3D Visibility of Cylinders
• Partial
• Full
– Shows if required 150mm wide visible
portion on Cylinder is achieved
6
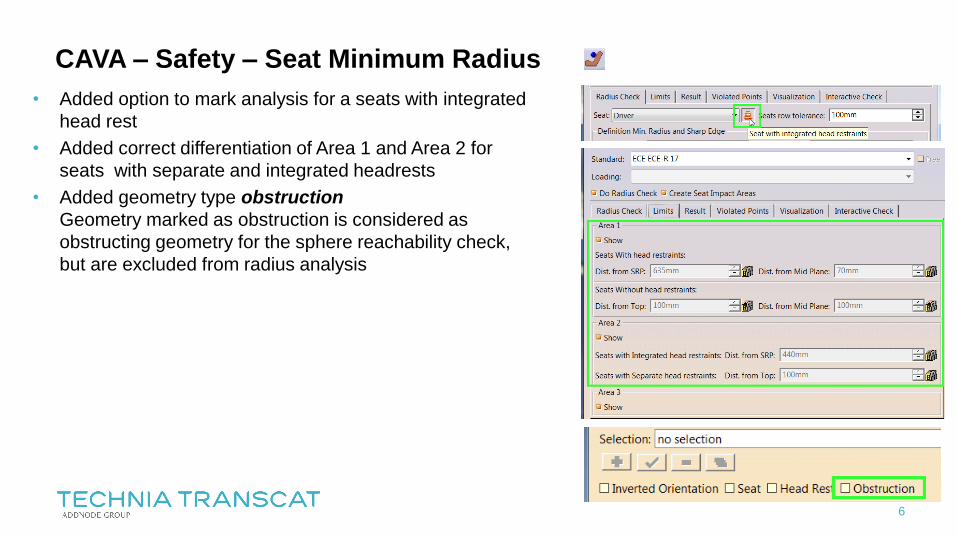
CAVA – Safety – Seat Minimum Radius
• Added option to mark analysis for a seats with integrated
head rest
• Added correct differentiation of Area 1 and Area 2 for
seats with separate and integrated headrests
• Added geometry type obstruction
Geometry marked as obstruction is considered as
obstructing geometry for the sphere reachability check,
but are excluded from radius analysis
7
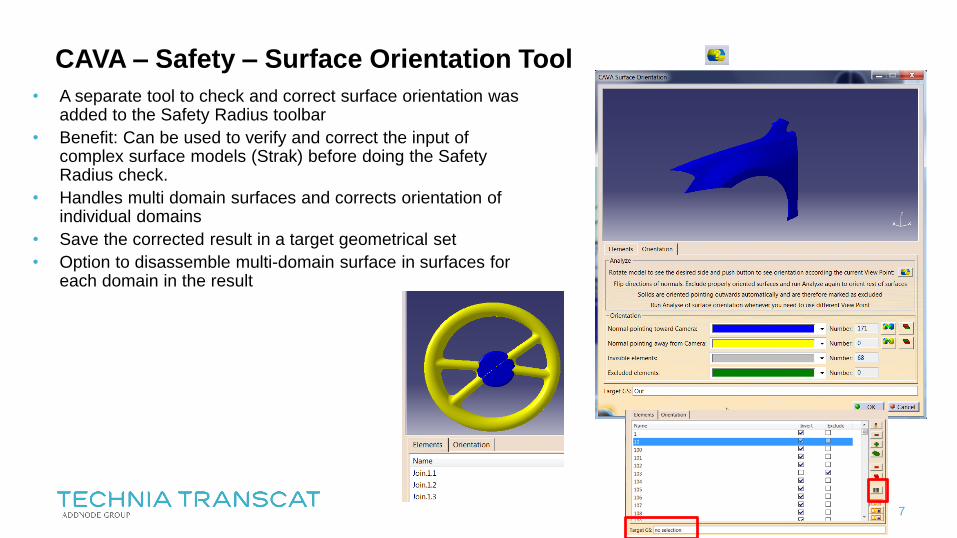
CAVA – Safety – Surface Orientation Tool
• A separate tool to check and correct surface orientation was added to the Safety Radius toolbar
• Benefit: Can be used to verify and correct the input of complex surface models (Strak) before doing the Safety Radius check.
• Handles multi domain surfaces and corrects orientation of individual domains
• Save the corrected result in a target geometrical set
• Option to disassemble multi-domain surface in surfaces for each domain in the result
8
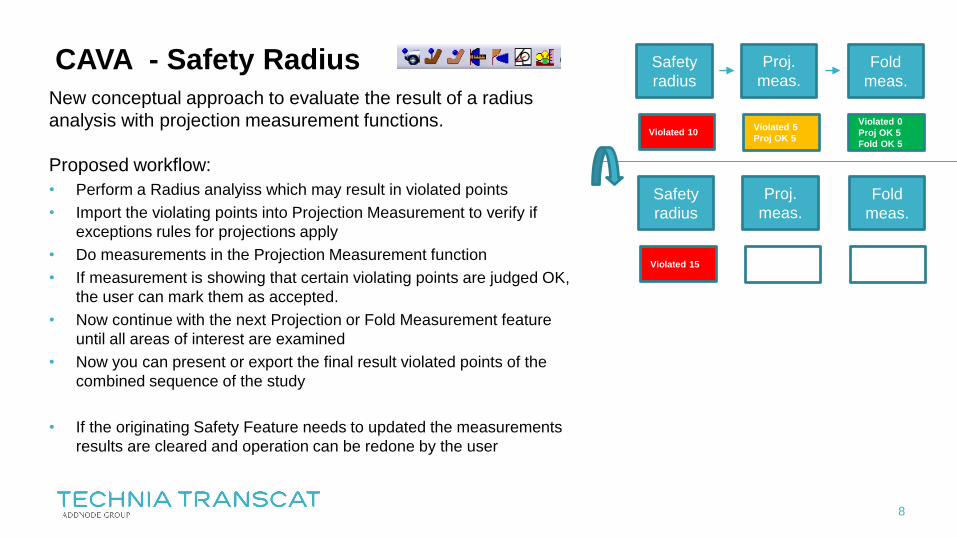
CAVA - Safety Radius
New conceptual approach to evaluate the result of a radius
analysis with projection measurement functions.
Proposed workflow:
• Perform a Radius analyiss which may result in violated points
• Import the violating points into Projection Measurement to verify if
exceptions rules for projections apply
• Do measurements in the Projection Measurement function
• If measurement is showing that certain violating points are judged OK,
the user can mark them as accepted.
• Now continue with the next Projection or Fold Measurement feature
until all areas of interest are examined
• Now you can present or export the final result violated points of the
combined sequence of the study
• If the originating Safety Feature needs to updated the measurements
results are cleared and operation can be redone by the user
Safety
radius
Proj.
meas.
Fold
meas.
Violated 10Violated 5
Proj OK 5
Violated 0
Proj OK 5
Fold OK 5
Safety
radius
Proj.
meas.
Fold
meas.
Violated 15
9
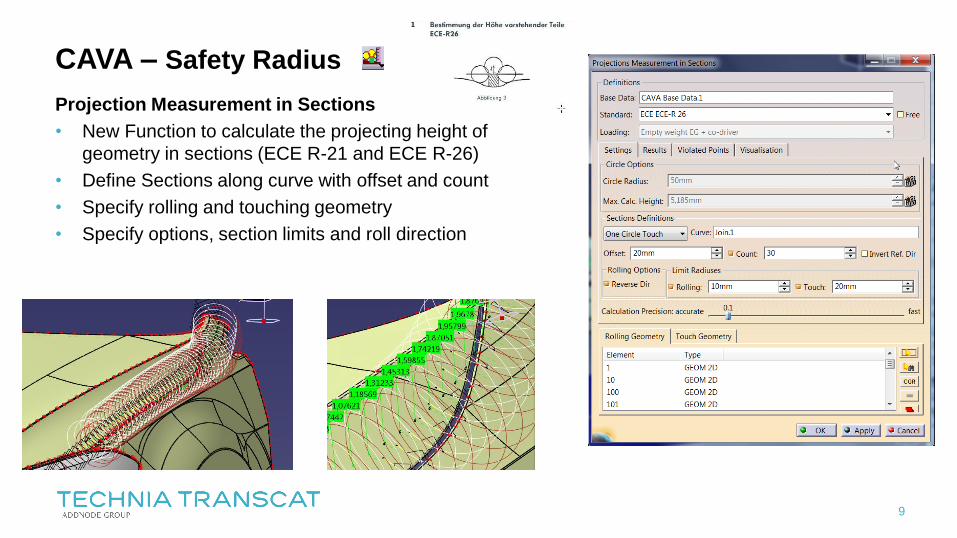
CAVA – Safety Radius
Projection Measurement in Sections
• New Function to calculate the projecting height of
geometry in sections (ECE R-21 and ECE R-26)
• Define Sections along curve with offset and count
• Specify rolling and touching geometry
• Specify options, section limits and roll direction

10
CAVA – Safety Radius
Projection Measurement in Sections
Fold Measurement
• Analyse results in section viewer
• Mark critical section
• Import violated points from any selected Safety Radius feature
• Manage violated points acceptance – Individual
– By section range and tolerance
• Extensive Visualization options
• RMB Context menu

11
CAVA – Safety – Pedestrian Protection
Bonnet Top Grid
• Improved accuracy of position of the touch point. Now
it is calculated as a contact point with a 3D sphere.

12
CAVA – Wiper
• Added possibility to calculate the force due to
spring loading acting on the axis center of the
blade axis towards the windscreen
• Available for the standard wiper (optional)
• Separate GUI to define the spring achor
points/axis and spring parameters
• Added pressure force as a new reportable method
to the 2D Wiper viewer and generic CAVA reports

13
CAVA – Manikin Template
• Added explicit neckpoint - upper end point of
torso line
• Added support ofSAE J 826 long-coupled seating condition
to Legroom measurement capability
• Added two new calculation methods
– Max legroom
– Min legroom
• Creates a „broken leg“ template
• Measures minimum or maximum legroom to
frontseat within the alllowed y-dir range
14
CAVA 1.30.x – New and changed Standards
ManikinTemplate.xml
• New positions "Pos.16 (Fond, Broken leg, Minimum Leg Room)" and "Pos.17 (Fond, Broken leg, Maximum Leg Room)„
CrashBarrier.xml
• Added new barrier shape and standard: IIHS (2016) small overlap
PMIS.xml Safety – projection measurement in sections
• Added new config file with standards ECE R-26 and ECE R-21
SeatMinimumRadius.xml
• Added new parameter for correct Area2 top distance (ECE R-17)
CloseRangeVisibility.xml
• Added new standard for rear view acc.: FMVSS 111 NPRM
Mirror.xml
• New standards FMVSS/J1050 added
• Standards FMVSS/J1050 are using farthest eyepoints on eyellipses acc. SAE J1050
15
CAVA 1.30.x – New and changed Standards
EyeEllipses.xml
• Added Standard "SAE J941 (1997-2002 class B p90/10)" relevant only fortrucks
• Added neck_pivot_back_distance of 98mm to SAE J942 (2002) standards
HeadContour.xml
• New revision of standards SAE J1052 (2017) with modified A40 delta coefficients
FieldsOfView.xml.truck (in Customer configuration – example for trucks)
• Added FieldsOfView.xml.truck to customer configuration
• Added standards using „SAE J941 (1997-2002 class B p90/10)„ for trucks
Mirror.xml.truck (in Customer configuration- example for trucks)
• Added new Standards for FMVSS111 using class B eye ellipses