capítulo 7 auto-valores/vectores e-mail: … · cuando hablamos de la forma cuadrática x tax, nos...
TRANSCRIPT

Capítulo 7 Auto-valores/vectores E-mail: [email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
193
193 193
ALGEBRA LINEAL EN CONTEXTO JOSE ARTURO BARRETO,M.A.
Correo electrónico: [email protected] Páginas Web: www.abaco.com.ve www.miprofe.com.ve www.abrakadabra.com.ve CAPITULO 7. AUTOVALORES Y AUTOVECTORES
OBJETIVOS
Al terminar el capítulo el estudiante deberá estar en capacidad de: 1. Calcular el polinomio característico de una matriz y hallar sus autovalores y autovectores. 2. Calcular los subespacio E(λ) de una matriz. 3. Diagonalizar matrices simétricas por matrices ortogonales. 4. Calcular autovalores de matrices simétricas utilizando matrices de rotación. 5. Descomponer una matriz en su forma QR. 6. Diagonalizar matrices simétricas y no simétricas utilizando transformaciones semejantes. 7. Calcular autovalores por diagonalización. 8. Diagonalizar matrices, de orden menor, por bloques utilizando la forma de Jordán.

Capítulo 7 Autovalores, Autovectores y Matrices de Rotación
[email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
194
194 194
7.1.- Transformaciones Semejantes Matrices de rotación Si tenemos un lugar geométrico en un eje de coordenadas y queremos saber su ecuación en otro eje de coordenadas que está rotado respecto al primero, aparecen las matrices de rotación, las cuales han jugado un papel muy importante en la matemática numérica. Sea V = (√√√√3,1) un vector cuyas coordenadas corresponden a un eje de coordenadas X’ – Y’, el cual está rotado un ángulo θ respecto al eje X – Y, como lo indica la figura. Y
Y’ y V(√3,1) = V(x1, y1) y1 θ x1 X’ P Q θ x X
Calculemos las coordenadas V(x,y) respecto al eje X – Y. Es claro que: (1) x = x1 cos θ - y1 sen θ = 3 cos θ - sen θ , y = x1 sen θ + y1 cos θ = 3 sen θ + cos θ Las ecuaciones (1) son equivalentes matricialmente a: x cos θ - sen θ x1
= y sen θ cos θ y1
donde las components (x,y) y (x1 , y1), en los diferentes ejes, se han expresado como los vectores columna o matrices 2x1. x y x1
y y1
La matriz cos θ - sen θ es una matriz de rotación. Luego si θ = 30° sen θ cos θ x cos 30° - sen 30° √3 √3/2 -1/2 √3 1
= = = y sen 30° cos 30° 1 1/2 √3/2 1 √3
Por lo tanto la expresión del vector √3 de X’-Y’ con respecto a X-Y es 1
1 √3 Las matrices de rotación definidas por cos θ - sen θ Rθ =
sen θ cos θ

Capítulo 7 Autovalores, Autovectores y Matrices de Rotación
[email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
195
195 195
Tienen entre otras propiedades la siguiente cos θ - sen θ cos θ sen θ cos 2 θ + sen 2 θ cos θ sen θ - sen θ cos θ Rθ RθT = =
sen θ cos θ - sen θ cos θ cos θ sen θ - sen θ cos θ sen 2 θ + cos 2 θ
1 0 = = I Luego Rθθθθ Rθθθθ
T = I, por lo tanto son invertibles y además Rθθθθ-1 = Rθθθθ
T 0 1
Las matrices con la propiedad de que su matriz inversa es precisamente la transpuesta, como se señala en las expresiones en negrilla, se denominan matrices ortogonales.
cos θ -sen θ Además, los vectores columna Rθθθθ
(1) = Rθθθθ(2) =
sen θ cos θ o escritos en forma convencional como
Rθθθθ(1) = (cos θ , sen θ) y Rθθθθ
(2) = (- sen θ cos θ ), tienen la propiedad < Rθθθθ
(1) , Rθθθθ(2) > = cos θ (- sen θ ) + sen θ (cos θ ) = 0, por lo tanto son ortogonales o perpendiculares
entre sí. Además Rθθθθ(1) = Rθθθθ
(2) = √( sen 2 θ + cos 2 θ) = 1 Por lo tanto además de ser ortogonales entre sí, son unitarios o de norma igual a 1. Se dicen por lo tanto ortonormales. Por lo tanto las matrices de rotación son matrices ortogonales, formadas por columnas ortonormales. Las matrices ortogonales de cualquier dimensión, han jugado un rol muy importante en el desarrollo del álgebra matricial numérica donde a partir de los trabajos pioneros de Wilkinson , Householder y otros se han desarrollado algoritmos estables para realizar cálculos numéricos. Existen diversas fuentes en donde podrá consultar la importancia de las transformaciones ortogonales en la creación de algoritmos estables. Además las encontraremos cuando estudiemos la descomposición QR y en la solución de problemas por mínimos cuadrados. Mayor información podrá conseguirse en el futuro en la página Web: www.abaco.com.ve Formas cuadráticas y diagonalización Utilizando la notación de los vectores (x,y), en la forma x como vectores columna, estudiaremos las expresiones de la forma: y
XTAx , en donde A es una matriz simétrica.
1 2 Veamos un ejemplo: Si A = , la forma cuadrática sería
2 -2
1 2 x x + 2y xTAx = x y = x y = (x2 + 2xy + 2xy -2y2 ) = x2 + 4xy - 2y2 2 -2 y 2x – 2y
en donde se aplica la constumbre de no distinguir las matrices de orden 1, de los escalares cuando ello no se presta a confusión como en este caso. La forma cuadrática termina siendo una forma algebraica en x e y. x Nótese que nos hemos tomado la libertad de hablar de la componente x del vector x = y

Capítulo 7 Autovalores, Autovectores y Matrices de Rotación
[email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
196
196 196
Cuando hablamos de la forma cuadrática xTAx, nos referimos al vector x con dos componentes, una de las cuales lleva desafortunadamente el mismo nombre. Como xTAx es una matriz de orden 1, concluimos que
(xTAx)T = xTAx. Además (xTAx) T = xT AT (xT)T= xT AT x . Por lo tanto, si B = (1/2)(A+ AT ) , entonces B es una matriz simétrica y además
xT A x = xT B x o sea que la matriz B, simétrica, produce la misma forma cuadrática. Por ello no se pierde generalidad cuando se estudian las formas cuadráticas de matrices simétricas. Igualando a 1 la forma cuadrática obtenida en el ejemplo, arribamos a la expresión: x2 + 4xy - 2y2 = 1 La expresión anterior es la ecuación de una cónica ( elipses, hipérbolas, par de rectas paralelas u otros casos degenerados). Como veremos, el término en xy aparece en la ecuación anterior porque la cónica está rotada, respecto al eje de coordenadas XY, como se ilustra en el gráfico siguiente, tomando como ejemplo una elipse. Y’ Y X’ θ X Queremos determinar la rotación θ de tal manera que la ecuación de la cónica en su nuevo eje X’-Y’ carezca de término en x’y’, o sea que tenga la forma: a’ x’2 + b’ y’2 = 1. De la introducción a las matrices de rotación recordemos que la relación entre (x , y) y (x’ , y’ ) está dada por x = Rθθθθ x’ y y’ Donde Rθθθθ es la matriz ortogonal de rotación. La forma cuadrática xT A x se transformaría en este caso en
(1) (Rθθθθ x’) T A Rθθθθ x’ = (x’)T Rθθθθ T A Rθθθθ x’ = (x’)T D x’ ,
Llamando D a la nueva matriz D = Rθθθθ
T A Rθθθθ.
D es todavía simétrica: basta probar D T = (Rθθθθ T A Rθθθθ ) T = Rθθθθ
T AT ( Rθθθθ T)T = Rθθθθ
T A Rθθθθ = D, Ya que A es una matriz simétrica, es decir A T = A. Además, la única manera de que aparezcan en la nueva forma cuadrática solo los términos en x’2 e y’2 y nó terminos en x’ y’ es que la matriz sea diagonal, es decir con ceros fuera de la diagonal principal. (probar esto es un buen ejercicio). Nuestro trabajo, para hallar θ consiste, en el caso del ejemplo en:
a ) Calcular Rθθθθ T A Rθθθθ.
b) Determinar θ tal que la matriz anterior sea diagonal c) Dar la nueva ecuación del lugar geométrico, en su nuevo eje canónico(sin término en x’y’).

Capítulo 7 Autovalores, Autovectores y Matrices de Rotación
[email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
197
197 197
Rθθθθ T A Rθθθθ = cos θ sen θ 1 2 cos θ - sen θ
sen θ cos θ 2 -2 sen θ cos θ cos θ+ 2 sen θ 2 cos θ -2 sen θ cos θ - sen θ = -sen θ + 2cos θ -2 sen θ -2 cos θ sen θ cos θ
cos 2 θ + 2 sen θ cos θ + 2 cos θ sen θ - 2 sen 2 θ - sen θ cos θ - 2 sen 2 θ + 2 cos 2 θ - 2 sen θ cos θ - sen θ cos θ - 2 sen 2 θ + 2 cos 2 θ - 2 sen θ cos θ sen 2 θ - 2 sen θ cos θ - 2 cos 2 θ - 2 sen θ cos θ
cos 2 θ + 4 sen θ cos θ - 2 sen 2 θ 2 cos 2 θ - 2 sen 2 θ - 3 sen θ cos θ 2 cos 2 θ - 2 sen 2 θ - 3 sen θ cos θ sen 2 θ - 4 sen θ cos θ - 2 cos 2 θ Para que la matriz sea diagonal debemos tener que
2 cos 2 θ - 2 sen 2 θ - 3 sen θ cos θ = 0 Es claro que θ ≠ 90°, por lo tanto cos θ ≠ 0. Podemos por lo tanto dividir la ecuación anterior por cos 2 θ , resultando:
- 2 tan 2 θ - 3 tan θ + 2 = 0. Sustituyendo u = tan θ, debemos resolver
- 2 u 2 – 3u +2 = 0 De donde salen las soluciones u1 = ½ u2 = -2 o sea tan θ = ½ o tan θ = -2 Tomaremos tan θ = ½ . Luego θ = tan -1 ( ½ ) = arctan (½) Por lo tanto θ ≈ 0, 4636 radianes. En este nuevo eje X’Y’ que está rotado aproximadamente 0, 4636 radianes ≈ 26 ½°, la forma cuadrática se expresa de acuerdo al argumento que sigue, recordando que la nueva matriz es diagonal y que basta calcular las entradas en las posiciones 1,1 y 2,2 de la matriz anterior. Como tan θ = ½ . Podemos calcular sen θ y cos θ a partir de la siguiente figura √5 θ 1 2 Luego sen θ = √5 / 5 cos θ = 2√5 / 5 De ahí concluimos que 4/5 + 8/5 –2/5 0
Rθθθθ T A Rθθθθ =
0 1/5 – 8/5 – 8/5
= 2 0 = D 0 -3
y además que cos θ - sen θ 2√5 / 5 -√5 / 5 Rθ = =
sen θ cos θ √5 / 5 2√5 / 5
Capítulo 7 Autovalores, Autovectores y Matrices de Rotación
[email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
198
198 198
La forma cuadrática original
1 2 x x + 2y xTAx = x y = x y = (x2 + 2xy + 2xy -2y2 ) = x2 + 4xy - 2y2 , 2 -2 y 2x – 2y
se transforma en
2 0 x’ 2x’ x’TAx’ = x’ y’ = x’ y’ = ( 2x’ 2 – 3y’ 2 ) = 2x’ 2 – 3y’ 2
0 -3 y’ - 3y’ La expresión del lugar geométrico en X-Y (*) xTAx = 1 o su expresión equivalente x2 + 4xy - 2y2 = 1, se ha transformado en x’TAx’ = 1 “ “ “ 2x’ 2 – 3y’ 2 = 1 en el eje rotado un ángulo θ La matriz 1 2 2 0 (**) A = se ha diagonalizado como D = 2 -2 0 -3 Por medio de la transformación ortogonal semejante (**) Rθθθθ
T A Rθθθθ = D Este ejemplo, pese a que seguirlo haya requerido un gran esfuerzo por su apelación a la trigonometría, cargado de sentido geométrico, nos acerca a la sorprendente belleza de la naturaleza que el hombre ha tratado de interpretar y modelar a través del desarrollo de las ciencias durante siglos. La historia de las matemáticas, parte de la fascinante historia del hombre, que solamente puede ser apreciada por quienes tengan una formación al menos básica en aritmética, álgebra, geometría, trigonometría, cálculo y otras disciplinas, es sorprendente! .
*********************
La geometría cuya sistematización se le atribuye a Euclides (300 años antes de Cristo) ha estado ligada al desarrollo de la humanidad durante siglos. El álgebra por medio de los estudios de Fermat (siglo XVII) y otros, transformó sus resultados en ecuaciones que pronto se despojaron de su sentido geométrico. Entre el siglo XVII y el XVIII, el cálculo diferencial e integral y los desarrollos en variable compleja con los trabajos de Newton(1642-1727), Leibnitz (1646-1716 ), Hilbert (1862-1943) y otros, marcan la ruta y sientan las bases de los éxitos en los años consecuentes. La aparición y popularización de las computadoras en la segunda parte del siglo XX, han catapultado las posibilidades de la matemática y contribuido al desarrollo de nuevas disciplinas. Es por ello que es necesario hablar ahora de “las matemáticas” y no de la “matemática”, puesto que ahora mas que nunca se expanden su universo y posibilidades. Estudios como el de los lugares geométricos y la simplificación de sus ecuaciones, que nacieron del campo de la geometría para ser trasladados al álgebra como se ha visto en el ejemplo, han aportado sus resultados a nuevos campos, entre ellos el análisis numérico del álgebra matricial que recibe gran impulso por los desarrollos del inglés Wilkinson en la época de los 50. El proyecto “Álgebra Lineal para todos”, en la Web, del cual hace parte este “libro”, pretende crear un reservorio de información sobre temas en matemáticas y otras ciencias, mas fundamentalmente, por el momento, pondrá especial atención a todos los desarrollos modernos en el análisis numérico del denominado por Wilkinson “problema de la teoría de autovalores”. Por ello es necesario resaltar algunas conclusiones, relacionadas con este “problema”, que pueden derivarse de este ejemplo con matrices de orden 2, que tendrá su significado cuando estudiemos los problemas de las matrices de gran dimensión, las matrices dispersas, etc.

Capítulo 7 Autovalores, Autovectores y Matrices de Rotación
[email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
199
199 199
Es tal la importancia de las aplicaciones del álgebra matricial para los computadores modernos, que hemos tratado en lo posible de orientar este texto hacia el álgebra matricial mas que convertirlo en un curso clásico de transformaciones lineales. La mirada al álgebra desde este importante punto de vista se pospondrá para otros capítulos dedicados a cursos avanzados, no por que el tema no lo amerite sino porque el enfoque numérico nos brinda oportunidades sin entrar en un universo de abstracción que reduciría la comprensión de los temas. Por supuesto habrá quienes disentirán pero “por ahora” esa es nuestra posición.
************************** Volvamos a nuestro ejemplo. Las matrices de rotación definidas por cos θ - sen θ Rθ =
sen θ cos θ Tienen entre otras propiedades la siguiente
cos θ - sen θ cos θ sen θ cos 2 θ + sen 2 θ cos θ sen θ - sen θ cos θ Rθ Rθ
T = =
sen θ cos θ - sen θ cos θ cos θ sen θ - sen θ cos θ sen 2 θ + cos 2 θ 1 0 = = I (i) Luego Rθθθθ Rθθθθ
T = I, por lo tanto son invertibles y además Rθθθθ-1 = Rθθθθ
T 0 1
Las matrices con la propiedad de que su matriz inversa es precisamente la transpuesta, como se señala en las expresiones en negrilla, se denominan matrices ortogonales.
cos θ -sen θ Además, los vectores columna Rθθθθ
(1) = Rθθθθ(2) = o escritos en forma convencional
sen θ cos θ como Rθθθθ
(1) = (cos θ , sen θ) . y Rθθθθ(2) = (- sen θ cos θ ), tienen la propiedad
(ii) < Rθθθθ
(1) , Rθθθθ(2) > = cos θ (- sen θ ) + sen θ (cos θ ) = 0, por lo tanto son ortogonales o
perpendiculares entre sí.
Además (iii) Rθθθθ(1) = Rθθθθ
(2) = √( sen 2 θ + cos 2 θ) = 1 Por lo tanto además de ser ortogonales entre sí, son unitarios o de norma igual a 1. Se dicen por lo tanto ortonormales. Por lo tanto nuestras matrices de rotación son matrices ortogonales, formadas por columnas ortonormales. Para nuestra adecuada escogencia de θ, tenemos que: Rθθθθ
T A Rθθθθ = D, D es una matriz diagonal. Como se dijo, Rθθθθ es una matriz ortogonal que diagonaliza a la matriz simétrica A, por medio de una transformación semejante. (Una transformación semejante de A es una expresión de la forma BAB-1 o del tipo B-1BA, en donde B es por supuesto una matriz invertible, no singular) La transformación Rθθθθ
T A Rθθθθ es una transformación semejante ya que Rθθθθ T = Rθθθθ
-1 por ser R una matriz ortogonal. Las transformaciones semejantes conservan los autovalores, término que se aclarará mas adelante, pero al cual nos acercaremos revisando el ejemplo, así,

Capítulo 7 Autovalores, Autovectores y Matrices de Rotación
[email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
200
200 200
Transformando Rθθθθ
T A Rθθθθ = D en RθθθθRθθθθ T A Rθθθθ = Rθθθθ D.
Concluimos que A Rθθθθ = Rθθθθ D , Particionando a A y Rθθθθ y D, en sus columnas A1 y A2 , Rθθθθ
(1) , Rθθθθ(2) y D(1) y D(2) , tenemos que:
A Rθθθθ(1) Rθθθθ
(2) = Rθθθθ D(1) D2(2)
A Rθθθθ(1) ARθθθθ
(2) = Rθθθθ D(1) Rθθθθ D2(2) ,
Luego (***) (a) A Rθθθθ(1) = Rθθθθ D(1) , (b) ARθθθθ
(2) = Rθθθθ D(2)
Examinando las igualdades anteriores en nuestro caso particular (***a) 1 2 2√5 / 5 2√5 / 5 -√5 / 5 2 1 2 2√5 / 5 4√5 / 5 2√5 / 5 = ,luego, = = 2 2 -2 √5 / 5 √5 / 5 2√5 / 5 0 2 -2 √5 / 5 2√5 / 5 √5 / 5 Por lo tanto A Rθθθθ
(1) = 2 Rθθθθ(1)
(***b) 1 2 -√5 / 5 2√5 / 5 -√5 / 5 0 1 2 -√5 / 5 3√5 / 5 -√5 / 5
= , luego, = = -3 2 -2 2√5 / 5 √5 / 5 2√5 / 5 -3 2 -2 2√5 / 5 -6√5 / 5 2√5 / 5 Por lo tanto A Rθθθθ
(2) = -3 Rθθθθ(2)
Las expresiones A Rθθθθ
(1) = 2 Rθθθθ(1) y A Rθθθθ
(2) = -3 Rθθθθ(2)
Constituyen nuestro primer encuentro con un conjunto de vectores relacionados con A los autovectores y un conjunto de valores asociados con ellos, los autovalores a los cuales dedicaremos capítulos básicos y varios apéndices, dada su importancia para las matemáticas y las ciencias. Dada una matriz A, un autovector de A es un vector v ≠≠≠≠ 0, tal que Av = λv, para algún número λ. El número λ correspondiente se denomina un autovalor. En consecuencia, las columnas de nuestra matriz de rotación Rθθθθ son autovectores de A y los elementos de la diagonal de A, sus correspondientes autovalores. Nuestro método de solución, del problema geométrico de las cónicas rotadas respecto a un eje, que pretende hallar su fórmula algebraica respecto a su eje canónico, donde no está rotada (ni transladada que es un problema menor) eliminando el factor xy y dejando sólo los términos de 2do. grado, nos llevó a estudiar las matrices ortogonales de rotación. Encontramos que para nuestra matriz A, hallamos una matriz ortogonal de rotación Rθθθθ formada por autovectores de A y de la matriz D, diagonal, que simplifica la forma cuadrática esta formada por sus correspondientes autovalores. En capítulo posterior resolveremos el problema calculando directamente los autovalores y los autovectores, lo cual será más facil siempre y cuando utilicemos un paquete como Matlab, Maple o matemática cuando los vectores sean de dimensión 3 o mayor.
Para la matriz 1 2 2√5 / 5 -√5 / 5 A = los autovalores son , los correspondientes autovalores 2 -2 √5 / 5 2√5 / 5 λ1 = 2, λ2 = -3 Si dibujamos estos autovalores en X-Y, obtenemos

Capítulo 7 Autovalores, Autovectores y Matrices de Rotación
[email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
201
201 201
2√5 / 5 Rθθθθ
(2) √5 / 5 θ2 Rθθθθ
(1) θ1
-√5 / 5 2√5 / 5 Si examinamos los ángulos θ1 y θ2 que forman los autovalores Rθθθθ
(1) , y Rθθθθ(2) con el eje X, hallamos que
tg θ1 =(√5 / 5) / 2√5 / 5 = 1/2 y tg θ2 = (2√5 / 5) /- (√5 / 5) = -2
Estos fueron exactamente los valores que definieron la rotación θ en la ecuación de segundo grado que resolvimos para diagonalizar la matriz. En consecuencia, los autovalores están precisamente en la dirección de los ejes de rotación. La forma cuadrática original fue reducida a: 2x’ 2 – 3y’ 2 y la ecuación de la cónica a 2x’ 2 – 3y’ 2 = 1. Los números 2 y –3, que aparecieron en la matriz diagonalizada, son además los autovalores y son los que determinan los coeficientes de los factores cuadráticos en la última ecuación. Por los valores y signos de los autovalores, concluimos que la cónica es una hipérbola. Si los autovalores fuesen ambos positivos sería una elipse y si son iguales y positivos, una circunferencia. Posteriormente como lo comentamos antes, a partir del cálculo de los autovalores y los autovectores, sacaremos las consecuencias geométricas o de otro tipo, según la aplicación. Si en lugar de la matriz simétrica A del problema propuesto y recientemente resuelto, tuviéramos la matriz simétrica a c
A = c b
entonces, la matriz a diagonalizar estaría dada por
(****) cos θ sen θ a c cos θ - sen θ
- sen θ cos θ c b sen θ cos θ En este producto de matrices, el cual es de orden 2, las expresiones en los términos fuera de la diagonal, deben ser iguales ya que la nueva matriz es aún simétrica, puesto que la transformación semejante es ortogonal. Deben ser igualados a cero para que queden sólo los factores de segundo grado en la forma cuadrática, por lo tanto : ( b - a) sen θ cos θ + c cos 2 θ - c sen 2 θ = 0 Dividiendo por cos 2 θ , obtenemos: -c tan 2 θ + (b – a) tan θ + c = 0 Multiplicando ambos lados de la ecuación por –1 y sustituyendo u = tan θθθθ, Debemos resolver: (1) c u 2 + (a - b) u - c = 0 Si la ecuación de la cónica estuviese dada por x T A x = 1

Capítulo 7 Autovalores, Autovectores y Matrices de Rotación
[email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
202
202 202
8 6 donde A = o sea, si la ecuación fuese 8 x2 + 12 xy + 3 y2 = 1
6 3 la ecuación a resolver para hallar θ sería, veáse (1) arriba, (1) 6 u 2 + 5 u - 6 = 0 De donde u1 = 2/3 , u2 = -3/2. Por lo tanto: tan θ 1 = 2/3 y tan θ 2 = -3/2 Luego θ ≈ 0,5880 radianes ≈ 33° 41’. Además, tomando tan θ = 2/3 Y si calculamos, los términos de la matriz diagonal obtenida a partir de (****),
a cos2 θ + 2 c sen θ cos θ + b sen 2 θ , es el término en 1ra. fila, 1ra. columna, obteniendo
8 (9/13) + 2 (6) (2/√13)(3/√13) + 3 (4/13) = 12
Aquí hemos sustitído a = 8 , b = 3, c = 6 y los valores de sen θ y cos θ, han sido calculados a partir de que tan θ = 2/3 con ayuda del siguiente triángulo √13 2 θ 3 Del mismo modo:
a sen2 θ - 2 c sen θ cos θ + b cos 2 θ , es el término en 2da. fila, 2da. columna, obteniendo
8 (4/13) + 2 (6) (2/√13)(3/√13) + 3 (9/13) = - 1
Como Rθθθθ(1) = cos θ y Rθθθθ
(2) = - sen θ , vectores columna de la matriz de rotación son los sen θ cos θ autovectores, concluimos que estos son:
(3/√13) - (2/√13)
(2/√13) (3/√13) Estos autovectores son de norma o oongitud 1, como puede comprobarse Los autovalores correspondientes son 12 y –1, tomados de la matriz diagonal 12 0
0 -1 La ecuación de la cónica en el nuevo eje X’-Y’, sería: 12x’ 2 – y’ 2 = 1 con cortes con el eje X’, cuando y’ = 0, o sea en x’ = (+/-) √3 / 6 La cónica sería de nuevo una hipérbola, no rotada sobre los ejes X’-Y’, en la dirección de los autovectores. Además. Si v es un autovector de A, con autovalor λ, entonces kv es también un autovector, con el mismo autovalor, veamos: A(kv) = k Av = kλv = λ(kv) Por lo tanto podemos escoger como autovectores a

Capítulo 7 Autovalores, Autovectores y Matrices de Rotación
[email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
203
203 203
3 y -2 2 3 El gráfico podría parecerse a: Y’ X’ Ejercicios
1. Determine la ecuación cartesiana, en su eje canónico (es decir, eliminando el término mixto en xy), y elabore bosquejos de los gráficos, acompañados de algunos comentarios, de los lugares geométricos descritos por:
a) x2 + y2 –2xy = 1 b) x2 + y2 +2xy = 1 c) x2 + y2 +4xy = 1 d) -x2 + y2 +4xy = 1 Ayuda: Si tiene dificultades, revise el ejercicio # 4. 2. Dadas las siguientes matrices simétricas:
a) A = b) A = c) A = d) A= i) Diagonalice, en cada caso, a las matrices por medio de una transformación ortogonal semejante, utilizando
una matriz de rotación como en el ejemplo presentado en la sección anterior..
i) Calcule los autovalores y dé al menos un autovector asociado con cada autovalor.
iii) Produzca, en cada caso, las fórmas cuadráticas XT A X = 1, en donde XT = ( x y). Utilizando las diagonalizaciones encontradas en 2), expreselas como formas cuadráticas en x ’, y ‘, sin término en x ‘ y ‘. Localice, estudiando las columnas de la matriz de rotación, los ejes principales. Dibuje e identifique el lugar geométrico.
3. La forma cuadrática 2 x 2 + √3 x y + y 2 = 4 fue diagonalizada por un estudiante como
5 x ’2 + y’ 2 = 8. Si esto es correcto, los números λ 1 = 5 y λ 2 = 1, son autovectores de la matriz simétrica A, correspondiente a la forma cuadrática xTAx.
i) Halle la matriz simétrica A.
ii) A partir de i) y con la ecuación que debe satisfacer el autovector con autovalor λ = 5, Ax = 5x, calcule el primer autovector v1. Haga lo mismo con el otro autovalor, calculando otro autovector v2.
iii) Normalice los autovectores v1 y v2 dividiendolos por su norma, es decir, sustituyéndolos por v1 / v1 y v2 / v2 . Con los nuevos autovectores normalizados forme la matriz Rθ de columnas normalizadas (v1,v2). Verifique
la transformación semejante RθTA Rθ = D, diagonalizando a A. Los autovalores 5 y 1 deben aparecer en la diagonal.
4. Demuestre que la forma cuadrática a x 2 + b x y + c y 2, se puede expresar como xTAx en donde: x T = ( x, y) y A = es una matriz simétrica.
2 1 1 -2
2 1 1 2
0 1 1 0
3 3 -1 -1
a b/2 b/2 c
1 √3 e) A = √3 -1
1 1 f) A = 1 1

Capítulo 7 Autovalores, Autovectores y Matrices de Rotación
[email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
204
204 204
5. En este capítulo, a título de ejemplo, diagonalizamos a la matriz simétrica A = a la forma
por medio de la transformación ortogonal semejante R θθθθ =
de tal modo que R θT A R θ = D , con D = Como R θθθθT = R θθθθ-1, tenemos que R θθθθ-1 A R θθθθ = D O lo que es equivalente: Cuando una matriz A se ha diagonalizado por una transformación semejante, como en el renglón anterior (Recuerde que la matriz utilizada para diagonalizar, es regular, mas no necesariamente ortogonal, se pueden extender una gran variedad de funciones a funciones de matrices, definiendo, por ejemplo, una función xn tal como Teniendo en cuenta que A2 = ( R θθθθ D R θθθθ
-1) . (R θθθθ D R θθθθ-1 ) = R θθθθ D (R θθθθ
-1 R θθθθ) D R θθθθ-1 = R θθθθ D DR θθθθ
-1.
Por lo tanto Y, por supuesto etc.
Además D 3 = Simplificando los cálculos. Esto es de gran utilidad cuando se quieren calcular potencias superiores de matrices. Pero aún más, nos permite generalizar muchas funciones, incluyendo trascendentes a la aritmética de matrices así.
Sea f(x) = x e. Definamos f(A) = A e = R θθθθ f (D) R θθθθ-1 = R θθθθ D e R θθθθ
-1 = R θθθθ R θθθθ
-1 Y cos (A) = R θθθθ cos (D) R θθθθ-1 = R θθθθ R θθθθ-1 Para la matriz A de este ejemplo, y con ayuda de una calculadora, calcule:
a) A 500 b) A –1 c) sen A d) cos A e) ln A f) A2 + A3 g) A 10 h) A e : e es la base de los logaritmos neperianos
6. La ecuación 2x2 + 4xy + 5y2 + 4x + 13y – ¼ = 0, puede expresarse como xTAx + bTx –1/4 = 0 en donde
A =
52
22 b =
13
4
a) Halle una matriz de rotación R θθθθ =
−
θθθθ
cos
cos
sen
sen, donde u = tan θ , satisface la ecuación
cu2 + (a – b)u – c = 0, en donde
bc
ca=
52
22, que diagonalice a A. Concluya que R θθθθ =
−
12
21
5
1
b ) Verifique que R θθθθT A R θθθθ = D , con D =
10
06, diagonaliza a A.
1 2 2 -2
2 0 0 -3
2√5 / 5 -√5 / 5 √5 / 5 2√5 / 5
2 0 0 - 3
A = R θθθθ D R θθθθ-1
f(x) = x2
A 2 = R θθθθ D 2 R θθθθ-1
A 3 = R θθθθ D 3 R θθθθ-1
2 3 0 0 (-3)3
2 e 0 0 (- 3) e
Cos(2) 0 0 cos(-3)

Capítulo 7 Autovalores, Autovectores y Matrices de Rotación
[email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
205
205 205
c) Verifique que R θθθθ(1) =
5
25
1
y R θθθθ(2) =
−
5
15
2
son autovectores de A con autovalores λ1 = 1 y
λ2 = 6 respectivamente y que además la sustitución x = R θθθθ x´, transforma a xTAx + bTx –1/4 = 0, en ( x´ )T R θθθθTA R θθθθ x´ + bT R θθθθ x´ –1/4 = 0, por lo tanto en ( x´ )T D x´ + bT R θθθθ x´ –1/4 = 0
y en consecuencia en: (*) 6x’2 + y’
2 + 6 5 x’ + 5 y’ – ¼ = 0
d) Complete cuadrados para expresar la ecuación anterior como
6(x’ + 5 /2)2 + (y’ + 5 /2)
2= 9
la cual es la ecuación de una elipse con centro en (- 5 /2, - 5 /2) en el nuevo eje.
FORMAS CUADRÁTICAS Una forma cuadrática en Rn, es una expresión de la forma x T A x, en donde A es una matriz simétrica. Si la matriz A, no fuese simétrica, podría reemplazarce, en la forma cuadrática por
A´= (1/2) ( A + A T ), matriz simétrica, con la característica de que x T A x = x T A´ x. Las formas cuadráticas aparecen en la expresión de diversos problemas Hemos presentado como ejemplo, la forma cuadrática, asociada a la matriz A = La cual por medio de la transformación ortogonal semejante R T A R = D, en donde R = Se transformó en la matriz diagonal D = Allí se comprobó, que R T = R –1, Es decir, que la matriz R es una matriz ortogonal. La transformación ortogonal, podía por lo tanto expresarse, en la forma general de las transformaciones semejantes, que no siempre involucran matrices ortogonales, mas si necesariamente, regulares, en la forma:
R -1 A R = D
1 2 2 -2
2√5 / 5 -√5 / 5 √5 / 5 2√5 / 5
2 0 0 -3

Capítulo 7 Polinomio característico [email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
206
206 206
De donde se concluye, premultiplicando, cada lado de la igualdad por R, como en el capítulo 6, que:
A R = R D. Si la matriz no singular R, se considera particionada en sus columnas como
R = R 1 R 2 Se concluye de la igualdad anterior que A R 1 R 2 = 2 R 1 - 3 R 2 , Luego, necesariamente (*) A R 1 = 2 R 1 , y A R 2 = -3 R 2 , Los números 2 y 3, que forman, en su orden, la matriz diagonal D, al satisfacer una ecuación del tipo
A x = λ x, x ≠ 0,
se denominan, autovalores de la matriz A y a R 1 y R 2 , los autovectores asociados a dichos autovalores . Es sorprendente que los autovectores y autovalores, los cuales son un tema obligatorio en todo curso serio de teoría de matrices o álgebra lineal, tengan tan diversas e importantes aplicaciones a las ciencias, en particular a la física, la economía, las ingenierias y a campos extraordinariamente disímiles. El tratamiento que este texto hace del asunto, pese a que pongamos el mayor esfuerzo en cubrir algunos temas, sólo logra mostrar el comienzo de una fabulosa producción de matemáticos y físicos, entre los más importantes, acerca del tópico, que ha producido extraordinarios avances en análisis numérico, los cuales relacionados con el “problema del valor propio” o “the eigenvalue problem” como lo llamó Wilkinson, junto con sus aplicaciones, podrían llenar infinidad de tomos. He aquí otra relación: al comenzar el capítulo 1, nos referimos a las matrices de transición regulares ( no se refiere a invertibles, vea la definición de matriz de transición regular en dicho capítulo) , señalando que en ellas se alcanza un estado de estabilidad, al cual tiende T n cuando n crece. Vimos en un ejemplo en tal capítulo que T n tiende a una matriz Formada por n vectores columna iguales. El vector columna x , tiene la propiedad A x = x y es por lo tanto un autovector de la matriz de transición T, asociado al autovalor , λ = 1.. El vector x es el único vector de probabilidad ( sus componentes suman 1), con tal autovalor. En el ejemplo de las formas cuadráticas en R2, los autovalores de la matriz que define la misma, aparecen en la expresión de la forma cuadrática diagonalizada, sin términos en x’y’. Los autovectores, señalan la dirección de los ejes canónicos, sobre los cuales descansan los lugares geométricos, rotados un ángulo θ. Existen diversas formas de introducir la teoría de autovalores y autovectores, las cuales puede consultar en la página Web: www.abaco.com.ve 7.2.- Polinomio Característico AUTOVALORES Y AUTOVECTORES Un vector x ≠ 0 es un autovector, de una matriz cuadrada A nxn, denominado también eigenvector, vector propio, o vector característico, si existe un valor λ ε C , ( campo de los números complejos ), tal que:
x x x ... x

Capítulo 7 Polinomio característico [email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
207
207 207
(2.1) A x = λ x A tal número λ se le denomina un autovalor, eigenvalue, valor propio o valor característico, asociado al autovector x. Pese a que estamos estudiando matrices con elementos reales, es posible, como veremos mas adelante, que los autovalores de estas sean números complejos. A los autovectores x se les exige la condición x ≠≠≠≠ 0. Condición fundamental, que tendrá sus implicaciones. El conjunto de los autovalores de una matriz A se conoce como el espectro de A. CALCULO DE AUTOVALORES Y AUTOVECTORES De (2.1), concluimos que si x ≠≠≠≠ 0, es un autovector y λ su correspondiente autovalor, entonces el sistema homogéneo (2.2) ( A - λ I ) x = 0, donde I es la matriz idéntica, tiene al menos esa solución no trivial (el autovector x ≠≠≠≠ 0). Esta situación se da si y sólo si, la matriz
A - λ I es singular, lo cual es equivalente a que
(2.3) A - λ I = 0. La ecuación (2.3) se denomina la ecuación característica de A y al determinante A - λ I , el polinomio característico de A. Todo autovalor de A es una raiz o cero de su polinomio característico. En el caso de la matriz (2.4) A = asociada a la forma cuadrática, que se estudió en el capítulo 6, el polinomio característico es: (2.5) A - λ I = = ( λ + 2 ) ( λ - 1 ) – 4 = λ2 + λ - 6 Para calcular (2.5), hemos multiplicado por (-1), simultáneamente a 1 - λ y a - 2 - λ, truco no importante que emplearemos continuamente para agilizar nuestros cálculos por medio de un bien conocidi producto notable. Algunos autores definen el polinomio característico como λ I - A, definición que a la larga es equivalente ya que en tal caso λ I - A = = = ( λ - 1 ) ( λ + 2 ) – 2 = λ2 + λ - 6 Sin embargo, por razones también poco importantes, hemos optado por la expresión A - λ I para el polinomio característico. Las raíces del polinomio característico o ceros de la ecuación característica (2.6) λ2 + λ - 6 = 0
1 2 2 -2
1 - λ 2 2 - 2 - λ
λ - 1 2 2 λ- ( -2 )
λ - 1 2 2 λ + 2 )

Capítulo 7 Transformaciones semejantes [email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
208
208 208
(2.7) son precisamente los autovalores λ 1 = 2 y λ 2 = - 3, calculados por diagonalización de la matriz A, en el capítulo 6. La relación entre el problema de diagonalización de matrices y el cálculo de los valores y vectores propios, expuesta en el capítulo 6 , la explicaremos de nuevo para el caso de matrices cuadradas de orden n. En general, el problema de la diagonalización se expresa como, hallar una matriz B, regular, no necesariamente ortogonal, tal que: (2.7) B –1 A B = D, En donde D es una matriz diagonal ( con ceros fuera de la diagonal principal ). En tal caso se dice que A ha sido diagonalizada por una transformación semejante. La importancia de la diagonalización de matrices por medio de transformaciones semejantes, para la solución del problema del valor propio ( calculo del autovalor ), radica en la siguiente proposición. (2.8) Proposición:
Si las matrices A y C, son semejantes, es decir, están relacionadas por una transformación semejante. (2.9) B –1 A B = C, Entonces El espectro de A o conjunto de sus autovalores es precisamente el espectro de C, o sea que ambas matrices tienen los mismos autovalores.
Ello se debe a que si λ es un autovalor de la matriz A, tendremos que:
A x = λ x, para algún vector x ≠ 0. Por lo tanto, de 2.9
C (B -1 x) = (C B –1 ) x = (B –1 A) x = B –1 (Ax) = B –1 (λ x) = λ B –1 ( x ),
de donde se concluye que λ es un autovalor de C con autovector B –1 ( x ). Vemos así, que las transformaciones semejantes conservan los autovalores, mas no los
autovectores. Si λ es un autovalor de A con autovector x, entonces λ es también un autovalor de B –1 A B = C, con autovector B –1 x ( asumimos por supuesto que A ≠≠≠≠ C. Por supuesto, que con un razonamiento similar, aplicado ahora a A = B C B –1, concluimos que todo autovalor de C es un autovalor de A. Es decir, como se propuso, A y C tienen los mismos autovalores. Se puede probar que los autovalores de una matriz diagonal D, son precisamente los elementos de la diagonal principal. Por lo tanto, si las matrices cumplen la relación 2.7
B –1 A B = D,
En donde D es una matriz diagonal, los autovalores de la matriz A, son precisamente los elementos de la diagonal de la matriz D.

Capítulo 7 Transformaciones semejantes [email protected] Venezuela
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
209
209 209
En el capítulo 6, la matriz A = fue diagonalizada como D =
De donde se concluye que sus autovalores son λ1 = 2 y λ2 = -3. De paso, en el mismo capítulo, los autovectores calculados fueron v1 = y v2 = CALCULO DE AUTOVALORES Y AUTOVECTORES UTILIZANDO EL POLINOMIO CARACTERÍSTICO Estudiaremos ahora los autovalores y autovectores de la matriz A anterior, utilizando el polinomio característico. Sea A =
A partir de la ecuación característica A - λI = 0, o sea de = 0
llegamos a : λ 2 + λ - 6 = 0
cuyas raices son: λ1 = 2 y λ2 = -3, los cuales son como ya se dijo, los autovalores de A, calculados en el capítulo 6, por el método de diagonalización que allí se presentó. Aun cuando parece mas sencillo, hallar los autovalores utilizando la ecuación característica, la facilidad es tan sólo aparente, ya que el polinomio característico de una matriz de orden superior, digamos n=6, es un polinomio de grado 6, cuyas raices no se pueden calcular por fórmulas que involucren radicales . Por extraño que parezca, los métodos numéricos para el cálculo de autovalores, proceden primero, de ser posible a diagonalizar a la matriz, extrayendo luego los autovalores de la matriz diagonalizada. En el capítulo 6, la transformación semejante que diagonalizó a A fué Rθ =
Se verificó además que las columnas de Rθ eran precisamente autovectores de A ,
correspondientes en su orden a los autovalores λ1 = 2 y λ2 = -3, que aparecieron en la matriz al diagonalizarla.
1 2 2 -2
2 0
0 -3
2√5 / 5 √5 / 5
-√5 / 5 2√5/5
1 2 2 -2
1 - λ 2 2 -2 -λ
2√5 / 5 -√5 / 5 √5 / 5 2√5 / 5

Capítulo 7 Subespacios E(λ )
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
210
210 210
Estos autovalores los podemos calcular ahora, a partir del hecho de que SI v = es un autovector correspondiente al autovalor 2, entonces A v = 2 v Ya que A = Esto nos lleva al sistema de ecuaciones v1 + 2 v2 = 2v1
2 v1 - 2 v2 = 2v2
o sea a: - v1 + 2 v2 = 0 2 v1 – 4 v2 = 0 La segunda ecuación, es el doble de la primera, de donde el sistema queda reducido a:la condición: v1 = 2 v2 lo cual corrobora que cada autovalor tiene infinitos autovectores asociados, todos en una misma dirección ( no necesariamente en el mismo sentido), ya que estamos en R2. Escogiendo
v2 = √5 / 5, obtenemos v1 = 2√5 / 5,
encontrando de esta forma un primer autovector, asociado al autovalor λ = 2 De una manera similar, podemos calcular un autovector ( o una familia de autovectores)
correspondiente al autovalor λ = - 3. Ejercicios 1. Para las siguientes matrices, halle el polinomio característico, los autovalores y los
autovectores asociados
(a)
−
−
24
910 (b)
34
21 (c)
07
30 (d)
10
01 (e)
−10
83 (f)
− 01
23
2. Para las siguientes matrices, halle el polinomio característico, los autovalores y los
autovectores asociados
(a)
−
−
500
032
023
(b)
− 8174
100
010
(c)
100
100
111
(d)
−
−
384
110
222
7.3.- Subespacios E(λλλλ)
Para cada autovalor λ de una matriz A, definiremos el conjunto E(λ) como el conjunto de
los autovectores con autovalor λ al cual se le anexa el vector v = 0.
Es decir: E(λ) = v A v = λ v
Se puede probar que con las operaciones definidas en el espacio vectorial Rn, E(λ) es un subespacio.
v 1
v 2
1 2 2 -2
Capítulo 7 Subespacios E(λ )
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
211
211 211
En el conjunto E(λ), se ha incluido, como se dijo, al vector v = 0, a pesar de que no es un autovector, por definición. La definición de E(λ) no exige la condición v ≠ 0, lo cual determina que 0 ε E(λ), no importa el valor de λ. Sin esta posibilidad E(λ) no sería un subespacio. AUTOVALORES Y AUTOVECTORES COMPLEJOS La ecuación característica nos permitirá mostrar que si una matriz no es simétrica (los autovalores de las matrices simétricas son reales), aun cuando conste de entradas reales, sus autovalores pueden ser números complejos y por lo mismo tendran entradas complejas sus autovectores. Sea A = Luego , la ecuación característica sera = λ2 - 2λ + 2 = 0 y sus autovalores serán λ1= 1 + 2i , λ2 = 1 - 2i Al resolver, Ax = λx, en el caso λ1 = 1 + 2i, arribamos a la ecuación, con infinitas soluciones: (i-1) x + y = 0, Lo cual indica que y = (1-i) x, y los autovectores deberán ser del tipo x , donde la x puede tomar cualquier valor Por lo tanto E(1 + 2i) = x Es un subespaciode dimensión 1, una recta en R2, cuyo único generador ( y base) es el vector
. v1 =
Como E(1 – 2i) = x Se concluye que E(1 – 2i) es también un subespacio de dimensión 1, cuya base es LA IMPORTANCIA DE LOS SUBESPACIOS E(λλλλ) Fue nuestra decisión evitar ejemplos de matrices con elementos complejos. Pese al ejemplo anterior nos mantendremos en nuestro punto de vista y evitaremos trabajar con matrices que pese a que estén compuestas por números reales sus autovalores sean números complejos y por lo tanto tendrían autovectores con números complejos. Estudio de los subespacios E(λλλλ) Mostraremos la relación de tales subespacios con la diagonalización de matrices a partir del siguiente ejemplo
Para la matriz A =
−
−−
221
212
122
, el polinomio característico es –(λ-3)2(λ+3) y por lo tanto sus autovalores
son λ1=3, de multiplicidad algebraica 2 y λ2=-3 , de multiplicidad algebraica 1. Sus subespacios E (λ), serán E (λ=3), y E (λ=-3).
3 -2 4 -1
3 - λ -2
4 -1-λ
1 1 - i
1 1 - i
1 1 - i
1 1 - i
1 1 - i
Capítulo 7 Subespacios E(λ )
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
212
212 212
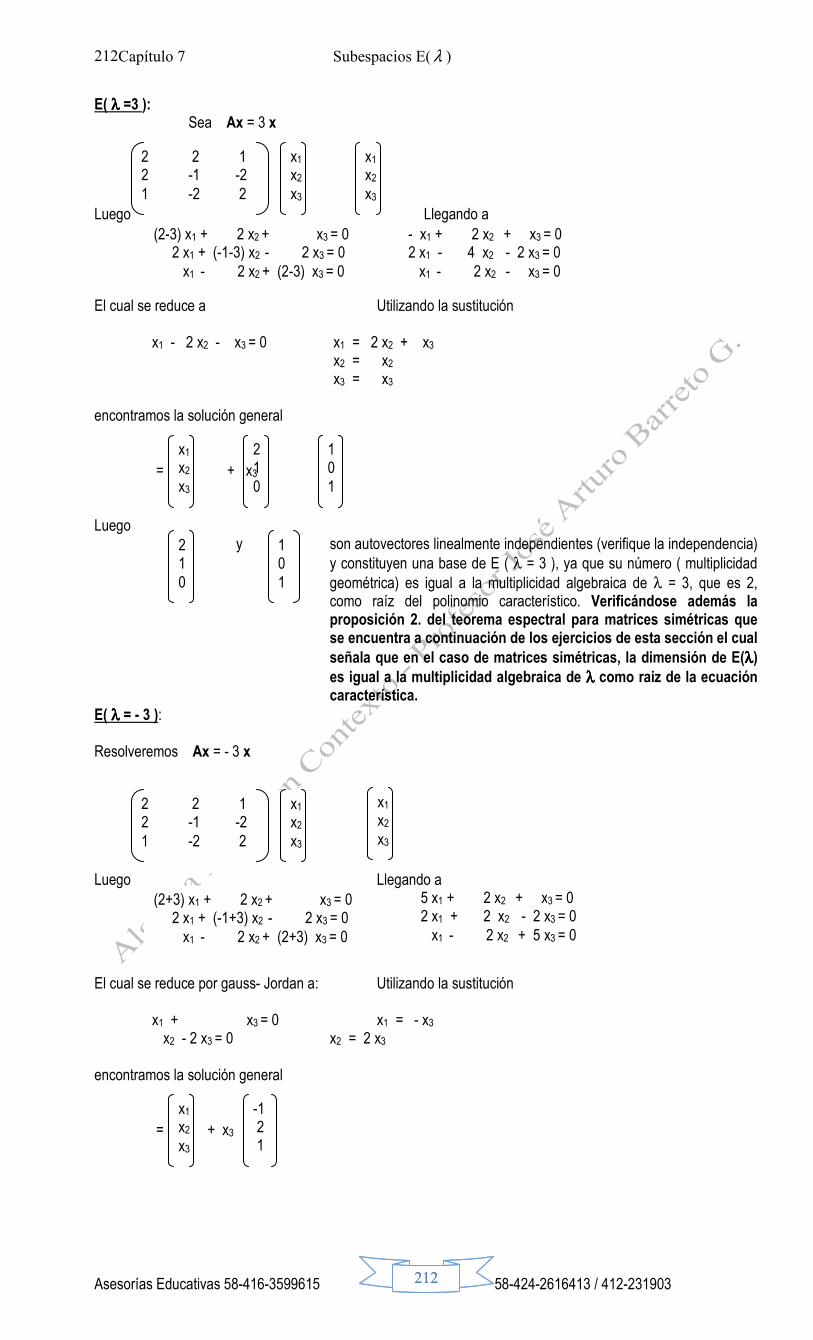
E( λλλλ =3 ): Sea Ax = 3 x
= 3 Luego Llegando a El cual se reduce a Utilizando la sustitución x1 - 2 x2 - x3 = 0 x1 = 2 x2 + x3
x2 = x2 x3 = x3
encontramos la solución general = x2 + x3 Luego
y son autovectores linealmente independientes (verifique la independencia) y constituyen una base de E ( λ = 3 ), ya que su número ( multiplicidad geométrica) es igual a la multiplicidad algebraica de λ = 3, que es 2, como raíz del polinomio característico. Verificándose además la proposición 2. del teorema espectral para matrices simétricas que se encuentra a continuación de los ejercicios de esta sección el cual señala que en el caso de matrices simétricas, la dimensión de E(λλλλ) es igual a la multiplicidad algebraica de λλλλ como raiz de la ecuación característica.
E( λλλλ = - 3 ): Resolveremos Ax = - 3 x = - 3 Luego Llegando a El cual se reduce por gauss- Jordan a: Utilizando la sustitución x1 + x3 = 0 x1 = - x3
x2 - 2 x3 = 0 x2 = 2 x3
encontramos la solución general = + x3
2 2 1 2 -1 -2 1 -2 2
x1
x2
x3
x1
x2
x3
(2-3) x1 + 2 x2 + x3 = 0 2 x1 + (-1-3) x2 - 2 x3 = 0 x1 - 2 x2 + (2-3) x3 = 0
- x1 + 2 x2 + x3 = 0 2 x1 - 4 x2 - 2 x3 = 0 x1 - 2 x2 - x3 = 0
x1
x2
x3
2
1
0
1
0
1
2
1
0
1
0
1
2 2 1 2 -1 -2 1 -2 2
x1
x2
x3
x1
x2
x3
(2+3) x1 + 2 x2 + x3 = 0 2 x1 + (-1+3) x2 - 2 x3 = 0 x1 - 2 x2 + (2+3) x3 = 0
5 x1 + 2 x2 + x3 = 0 2 x1 + 2 x2 - 2 x3 = 0 x1 - 2 x2 + 5 x3 = 0
x1
x2
x3
-1 2
1

Capítulo 7 Subespacios E(λ )
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
213
213 213
Luego E( λ = -3 ) es un subespacio de dimensión 1, generado por el vector Por lo tanto E (λ = -3) es un subespacio de dimensión 1, verificándose de nuevo la proposición 2. del teorema espectral para matrices simétricas el cual se encuentra un poco mas adelante. La multiplicidad geométrica de λλλλ = -3, (dimensión de E(λλλλ=-3)), es igual a su multiplicidad algebraica como raíz del polinomio característico (esto es siempre válido para matrices simétricas) El teorema espectral para matrices simétricas , el cual se encuentra a continuación del siguiente grupo de ejercicios, afirma en la proposición 3 que los vectores de E(λ=3) son mutuamente ortogonales con los de E(λ=-3), lo cual se puede verificar efectuando los productos punto o interiores, de cada uno de los vectores
y con los cuales dan 0, por supuesto.
Ejercicios 1. Para las siguientes matrices
a. Calcule sus autovalores utilizando la ecuación característica b. Estudie cada uno de los subespacios E(λ), especificando en cada subespacio una base, su
dimensión, y si su dimensión (multiplicidad geométrica de λ) es igual a la multiplicidad algebraica de λ.
i) ii) iii) iv) v) vi)
2. Demuestre que si A es una matriz no singular, entonces autovalores de A -1 son de la forma λ-1, en donde los
λ son precisamente los autovalores de A. Ayuda: Método 1. Para cada autovalor λ de A, y su autovector asociado x, calcule A-1x.
Método 2. Estudiando A-1 - λ I y relacionándolo con A - λ-1 I 3. Verifique que los autovalores de las matrices diagonal , triangular superior y triangular inferior,
respectivamente
A = B = C = son 1, -2, 3. Pruebe que en general si A es una matriz cuadrada diagonal, triangular superior o inferior, sus
autovalores son los elementos de la diagonal. Ayuda: La matriz A-λI sería diagonal, triangular inferior o triangular superior según el caso. El determinante de una matriz diagonal o triangular, superior o inferiror, es precisamente el producto de los elementos de la diagonal.
4 Calcule el espectro o conjunto de autovalores de la siguiente matriz, señalando para cada autovalor su multiplicidad algebraica.
-1 2
1
2
1
0
1
0
1
-1 2
1
2 5 - 1 - 4
0 - 1 1 0
2 -2 -1 0 1 0 2 -4 -1
3 -1 1 0 0 3 0 0 0 0 3 0 0 0 0 - 5
3 -1 0 0 -4 -1 0 0 0 0 3 0 0 0 0 - 5
3 -1 0 0 -4 -1 0 0 0 0 2 1 0 0 -1 0
1 0 0 0 -2 0 0 0 3
1 3 1 0 -2 4 0 0 3
1 0 1 5 -2 7 0 0 3
1 1 4 2 2 1 3 6 0 0 -1 2 0 0 0 5

Capítulo 7 Teorema espectral
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
214
214 214
5. Halle el espectro de las siguientes matrices. Para cada autovalor λ halle una base de E(λ). , , 6. a) El rango de una matriz es el número de columnas linealmente independientes. Demuestre que las
transformaciones semejantes preservan el rango. Es decir que si A es de rango r, entonces H-1AH es de rango r.
b) Demuestre que si H-1AH = D, donde D es una matriz diagonal, entonces HTA(HT)-1 = D c) Demuestre que el rango de una matriz diagonal es igual al número de elementos diferentes de 0 en su
diagonal. d) Demuestre que si A es diagonalizable entonces el rango de A es igual al rango de AT. (Esta proposición es
verdadera para toda matriz A, sea o no diagonalizable). 7.4- Teorema Espectral Teorema espectral para matrices simétricas Continuaremos nuestra presentación dedicándonos al análisis, por medio de ejemplos, de las matrices simétricas con elementos reales, las cuales según lo señala el Teorema espectral para matrices simétricas tienen sólo autovalores y autovectores reales Una matriz simétrica A goza de las siguientes propiedades Este estudio de los subespacios E(λ) para matrices simétricas y por lo tanto de sus autovalores y autovectores, es de singular importancia ya que muchas matrices que se presentan en situaciones reales o son simétricas o en la solución del problema intervienen matrices simétricas como lo describiremos a continuación.
-3 1 0 1 -2 1 0 1 - 3
4 2 2 2 4 2 2 2 4
- 3 1 0 1 -2 1 0 1 -3
1 1 1 0 2 1 0 0 2
1 2 4 -3 0 1 7 7 0 0 3 8 0 0 0 -2
1 1 1 1 1 1 1 1 1
2 6 2 - 2
1. A tiene n autovalores reales, contando las multiplicidades
2. Cada subespacio E(λ) tiene como dimensión la multiplicidad del
autovalor λ como raíz del polinomio característico.
3. Los espacios E(λ) son mutuamente ortogonales, es decir, los
autovectores de cada espacio E(λ) son ortogonales a los autovalores
de cada uno de los otros subespacios E(λ). 4. A es diagonalizable por una transformación ortogonal.

Capítulo 7 Teorema espectral
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
215
215 215
Ilustración del teorema espectral para matrices simétricas Ilustraremos el teorema espectral en el caso de la matriz simétrica A =
Recordemos que la solución por mínimos cuadrados de Ax = b, donde A es una matriz de dimensión mxn, es una solución de ATAx = b. La matriz ATA es una matriz simétrica. Si ATA es regular, entonces x = (ATA)-1ATb es la solución por mínimos cuadrados. Si ATA es singular, es decir no invertible, se define la seudoinversa de A o inversa Moore-Penrose denotada A+, así: A+ = Vr D-1Ur, donde
1. r es el rango de A.
2.
3. Las columnas de Vr son los autovectores , de
D-1 =
es una matriz diagonal de orden r. Los σ i, 1 ≤ i ≤ r, son las raíces cuadradas de los autovalores positivos de ATA (que son los mismos que los autovalores de A AT. Los autovalores de A AT y de ATA con siempre números no negativos).
ATA asociados a los σ i2, 1 ≤ i ≤ r.
Vr es de dimensión mxr 4. Las columnas de Ur, matriz de dimensión rxn, son los r autovectores de A AT
asociados a los σ i2, 1 ≤ i ≤r . Una solución por mínimos cuadrados (la de longitud mínima) se halla por la fórmula x = A+b
σ -1 σr -1
La descomposición en valor singular con amplias aplicaciones en compresión de imágenes y otros campos utiliza autovalores y autovectores de ATA (ATA y AAT son matrices simétricas independientemente de la dimensión de A).
Autovalores de matrices del tipo ATA se utilizan también en el soluciones por mínimos cuadrados totales
Los autovalores de matrices del tipo ATA o AAT, los cuales son siempre no negativos, los llamados autovalor dominante (máximo autovalor diferente de 0) y autovalor subdominante (autovalor diferente de 0, de valor mínimo) se utilizan en diferentes aplicaciones.
2 2 1 2 -1 -2 1 -2 2

Capítulo 7 Autovalores por matrices de rotación
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
216
216 216
A - λ I = = =
= ( 3 - λ ) 2
= ( 3 - λ ) 2 (-3 - λ ) = - ( 3 - λ ) 2 (3 + λ ) Por lo tanto los autovalores son λ = 3 con multiplicidad 2 y λ = - 3 con multiplicidad 1. Se han encontrado “3” autovalores “todos” reales, λλλλ = 3 con multiplicidad 2 y λλλλ = - 3 con multiplicidad 1, confirmandose el punto 1. del teorema espectral. 7.5.- Diagonalización por Transformaciones Ortogonales Diagonalización de matrices simétricas Una matriz A es diagonalizable, si existe una matriz Q, no singular, tal que
Q-1AQ = D en donde D es una matriz diagonal. Y λ es un autovalor de A con autovector v si y sólo si λ es un autovalor de D, ya que si
Ax = λ x, x ≠ 0, entonces
D (Q-1 x ) = Q –1AQ(Q-1x) = Q –1Ax = Q –1(λx) = λ (Q-1 x ) .
Por lo tanto Q-1 x ≠ 0, es un autovector de D, con autovalor λ. Note que los autovalores se conservan bajo transformaciones semejantes, no así los autovectores. Por lo tanto, si una matriz cuadrada es diagonalizable, sus autovalores se encontrarán en la diagonal de D. Es facil probar que los autovalores de una matriz diagonal son precisamente los elementos de la diagonal. Una pista para hallar Q, cuando A es diagonalizable es notar que
Q-1AQ = D ⇒⇒⇒⇒ AQ = QD Por lo tanto A ( Q1 Q2 ... Qn ) = ( d11 Q1 d22 Q2 ... dnn Qn ), al particionar las matrices en sus columnas. Por lo tanto A Q1 = d11 Q1, A Q2 = d22 Q2, ... , A Q1 = dnn Qn. Confirmándos que los autovalores de A, son los elementos de la diagonal de D. Pero además que las columnas de Q son precisamente sus autovectores asociados respecto de A. Por lo tanto, si podemos calcular los autovalores de A y autovectores asociados, habremos:
2 - λ 2 1 2 -1 - λ -2 1 -2 2 - λ
0 6 - 2λ - λ2 + 4λ - 3 0 3 - λ - 6 + 2λ 1 - 2 2 - λ
Operaciones elementales
F1 – ( 2 - λ ) F3
F2 – 2 F3
Extrayendo 3 - λ como factor común en las filas 1ra. y 2da.
Utilizando el 1 y su cofactor
6 - 2λ - λ2 + 4λ - 3 3 - λ - 6 + 2 λ
2 λ - 1 1 - 2
Capítulo 7 Autovalores por matrices de rotación
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
217
217 217
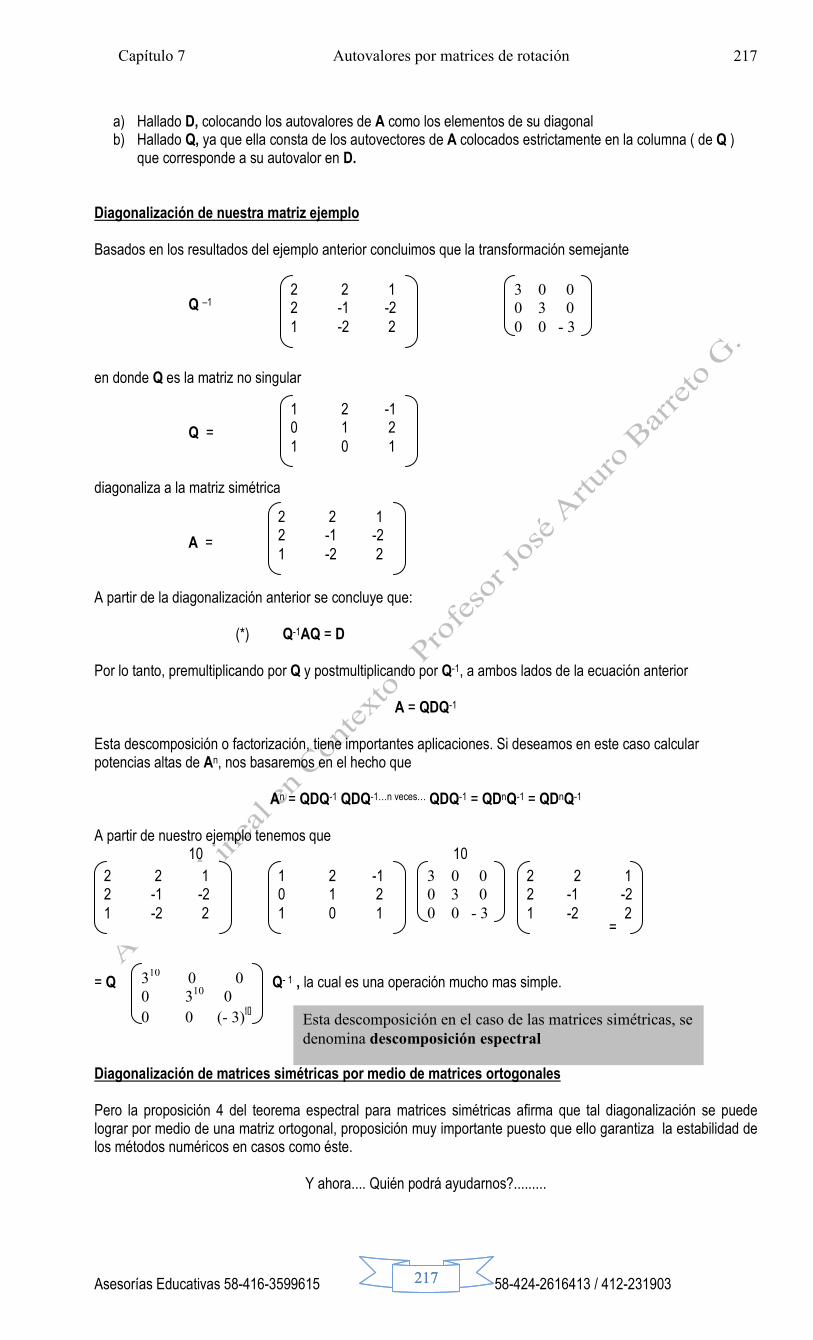
a) Hallado D, colocando los autovalores de A como los elementos de su diagonal b) Hallado Q, ya que ella consta de los autovectores de A colocados estrictamente en la columna ( de Q )
que corresponde a su autovalor en D. Diagonalización de nuestra matriz ejemplo Basados en los resultados del ejemplo anterior concluimos que la transformación semejante Q –1 Q = en donde Q es la matriz no singular Q = diagonaliza a la matriz simétrica A = A partir de la diagonalización anterior se concluye que:
(*) Q-1AQ = D Por lo tanto, premultiplicando por Q y postmultiplicando por Q-1, a ambos lados de la ecuación anterior
A = QDQ-1
Esta descomposición o factorización, tiene importantes aplicaciones. Si deseamos en este caso calcular potencias altas de An, nos basaremos en el hecho que
An = QDQ-1 QDQ-1…n veces… QDQ-1 = QDnQ-1 = QDnQ-1 A partir de nuestro ejemplo tenemos que 10 10 = = = Q Q- 1 , la cual es una operación mucho mas simple. Diagonalización de matrices simétricas por medio de matrices ortogonales Pero la proposición 4 del teorema espectral para matrices simétricas afirma que tal diagonalización se puede lograr por medio de una matriz ortogonal, proposición muy importante puesto que ello garantiza la estabilidad de los métodos numéricos en casos como éste.
Y ahora.... Quién podrá ayudarnos?.........
2 2 1 2 -1 -2 1 -2 2
3 0 0
0 3 0
0 0 - 3
1 2 -1 0 1 2 1 0 1
2 2 1 2 -1 -2 1 -2 2
2 2 1 2 -1 -2 1 -2 2
1 2 -1 0 1 2 1 0 1
3 0 0
0 3 0
0 0 - 3
2 2 1 2 -1 -2 1 -2 2
Esta descomposición en el caso de las matrices simétricas, se
denomina descomposición espectral
310 0 0
0 310 0
0 0 (- 3)10

Capítulo 7 Autovalores por matrices de rotación
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
218
218 218
No chapulín, ... es el método de ortogonalización de Gram-Schmidt.
Para tener una base ortogonal en R3, sólo nos falta obtener una base ortogonal de autovectores en E(λ=3), ya que todos los vectores en dicho subespacio son ortogonales al tercer vector por estar en E(λ=-3), según el teorema espectral (compruébelo en este caso) Pero para que dichos vectores al colocarlos como columnas de una matriz, la constituyan en una matriz ortogonal, se requiere no sólo la ortogonalidad sino la ortonormalidad, es decir, deben ser además de norma o longitud 1. Procederemos a ortogonalizar y a normalizar. Comencemos con los vectores de E(λ=3) v1 = v2 =
Por Gram-Schmidt obtenemos el primer vector u1 = Según el proceso de ortogonalización de Gram- Schmidt, podemos obtener el segundo vector u2 así:
u2 = v2 – ( <v2 , u1 > / < u1 , u1 > ) u1
En consecuencia u2 = - (2/2) = Dividiendo a u1 y u2 por sus normas, obtenemos los primeros dos vectores ortonormales
u1 = u2 = Como v3 = es ortogonal a todos los vectores de E(λ=3), basta con normalizarlo, dividiéndolo por su norma, para obtener: u3 = (1/√6) el cual es el tercer vector ortonormal. Formemos la matriz
1
0
1
2
1
0
1
0 1
2
1
0
1
0 1
1
1 - 1
1/√2
0
1/√2
-1 2
1
-1 2
1
1/√3
1/√3
- 1/√3

Capítulo 7 Autovalores por matrices de rotación
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
219
219 219
P = cuyas columnas son los vectores ortonormales u1, u2, u3.
Se puede verificar por multiplicación directa que P es una matriz ortogonal, es decir que P P T = I Y que P diagonaliza a A, es decir, P es tal que PTAP = D Efectivamente,
= Aparecen, por supuesto, los autovalores de A en la diagonal de la matriz D. El primer autovalor d11 = 3 de D corresponde al autovector , en la primera columna de P. El segundo autovalor d22 = 3 de D corresponde al autovector ,en la segunda columna de P. El tercer autovalor d33 = - 3 de D corresponde al autovector ,en la tercera columna de P. Como se puede experimentar, iniciando el proceso de ortogonalizacion con los vectores de E(λ=3) en diferente orden, la transformación semejante que diagonaliza a una matriz, no es única. Bastaría por ejemplo intercambiar las dos primeras columnas de P y obtendríamos, en el caso de este ejemplo, otra matriz ortogonal que diagonalizaría a la matriz A. Si intercambiamos en P, la segunda columna con la tercera, tendríamos que intercambiar en D, también a la segunda columna con la tercera, recalculando d22 = - 3, d33 = 3, apareciendo los autovalores en otro orden, perdiendo la bella separación de los autovalores que tiene D, la cual ha acumulado los autovalores de acuerdo a la suma directa E(λ=3) ⊕ E(λ= -3) en donde los autovalores aparecen acumulados en D, de acuerdo a sus multiplicidades. Pareciera siguiendo nuestros ejemplos, que el mejor método para diagonalizar matrices es hallar primero los autovectores utilizando las raíces de la ecuación característica, calculando primero los autovalores y luego los autovectores. Esa no es la práctica en la realidad ya que existen eficientes algoritmos estables, que por lo general diagonalizan adecuadamente a las matrices diagonalizables sin pasar por el cálculo de las raíces de un polinomio como el característico. Mas bién, la diagonalización es un paso previo al cálculo de autovalores. La razónes para hacerlo en ese orden se pueden consultar en un texto de análisis numérico. Muy temprano, en este texto, cuando tratamos los vectores en R2, apareció la diagonalización cuando ejemplificamos las formas cuadráticas en R2. Allí aparecieron los autovalores y los autovectores sin pasar por el polinomio característico utilizando matrices ortogonales para diagonalizar a la matriz.
1/√2 1/√3 - 1/√6 0 1/√3 2/(√6) 1/√2 - 1/√3 1/√6
1/√2 1/√3 - 1/√6 0 1/√3 2/(√6) 1/√2 - 1/√3 1/√6
1/√2 0 1/√2 1/√3 1/√3 - 1/√3 - 1/√6 2/√6 1/√6
2 2 1 2 -1 -2 1 -2 2
3 0 0
0 3 0
0 0 - 3
1/√2
0
1/√2
1/√3
1/√3
- 1/√3
- 1/√6
2/√6
1/√6

Capítulo 7 Autovalores por matrices de rotación
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
220
220 220
7.6.- Autovalores por Matrices de Rotación En el capítulo 6, sobre vectores en R2, diagonalizamos una matriz simétrica a c A =
c b utilizando una matriz de rotación
En el proceso de diagonalización arribamos a
cos θ sen θ a c cos θ - sen θ
- sen θ cos θ c b sen θ cos θ Para lograr que el producto final fuese una matriz diagonal, encontramos que el ángulo θ debe ser tal que ( b - a) sen θ cos θ + c cos 2 θ - c sen 2 θ = 0 Dividiendo por cos 2 θ , obtuvimos: (*) Esta ecuación nos será de gran utilidad aún para matrices de orden mayor. Generalizaremos esta idea a matrices de orden n > 2. Para mostrar el poder de los algoritmos de diagonalización presentamos la siguiente sección donde se utilizan las matrices de rotación de Givens para calcular los autovalores de la matriz anterior sin utilizar el polinomio característico. Matrices de Rotación Una matriz de rotación, conocida comunmente como Matriz de Rotación de Givens, es una matriz definida de la siguiente forma:
Fila i Ri , j (θθθθ) = Fila j Columna columna I j La expresion cos(θ) aparece en la diagonal en las posiciones ( i,i ) y ( j,j ). La expresión sen(θ) en posición ( j, i ) y - sen(θ) en posición ( i, j ). Los otros elementos de la diagonal son 1s, como en la matriz idéntica. Por supuesto que si trabajamos con matrices de orden 2, los unos no aparecen. La matriz de rotación de orden 2 enmarcada en gris presentada anteriormente se denominaría en esta nueva nomenclatura R1, 2 ( θθθθ) .
-c tan 2 θ + (b – a) tan θ + c = 0
cos θθθθ - sen θθθθ Rθθθθ =
sen θθθθ cos θθθθ
1
cos(θθθθ) - sen(θθθθ) 1 1
sen(θθθθ) cos(θθθθ) 1

Capítulo 7 Autovalores por matrices de rotación
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
221
221 221
Tal matriz se utilizó para lograr un cero por medio de una transformación ortogonal, en la posición (2,1), segunda fila, primera columna de la matriz a diagonalizar. Como tal matriz era simétrica y por ser Ri , j ( θθθθ) siempre una matriz ortogonal, la transformación semejante produce una matriz simétrica y por lo tanto otro cero aparece automáticamente en la posición (1,2) al aplicar la transformación ortogonal. Otra razón para utilizar matrices ortogonales en el proceso de diagonalización de matrices simétricas además de las razones de estabilidad mencionadas antes. O sea que para ser claros en nuestra nomenclatura hacemos notar que el 0 en la posición ( 2,1 ) se logró utilizando la matriz R1, 2 ( θθθθ) .
Nuestra notación se utiliza de manera apropiada, para concluir que un cero en posición ( i, j ) con i>j se obtiene utilizando la matriz Ri, j( θθθθ). Por ello, para lograr un cero en la posición, digamos (3,2), utilizamos la matriz de rotación R2 , 3 ( θθθθ) en la cual intervienen las filas 2 y 3. Por supuesto que si A es simétrica, también aparecerá un cero en posición ( 2, 3 ). Sea esta la ocasión para recordar que mis primeras lecturas sobre el tema fueron realizadas en el excelente libro de Wilkinson “The Algebraic eigenvalue Problem” y que mi recordado maestro Robert Todd Gregory al ingresar al “lecture course”, a su cargo en la universidad de Texas, en el cual me orienté en el tema, exclamaba
“Wilkinson is my Champion” Honor a quien honor merece
Después de esta disgresión retorno al tema. Aplicaremos este método a nuestra matriz ejemplo A = En nuestro proceso de diagonalización obtendremos un 0 en la segunda fila, primera columna, con nuestra transformación ortogonal, para obtener una matriz que gráficamente luciría como la siguiente: Para avanzar en el siguiente paso a la forma y en el siguiente a: Obteniendo la matriz diagonal deseada. Obtendremos el primer 0 en la posición ( 2, 1 ) utilizando la matriz de rotación de orden 3, R1, 2( θθθθ) en donde las expresiones sen(θ) y cos(θ) aparecen en las intersecciones de las filas 1 y 2 con las columnas 1 y 2, así:
R1, 2( θθθθ) =
2 2 1 2 -1 -2 1 -2 2
0 0
0 0 0
0
0 0 0 0
0 0
0
0
0 0 1
cos θθθθ - sen θθθθ
sen θθθθ cos θθθθ

Capítulo 7 Autovalores por matrices de rotación
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
222
222 222
T
La expresión R1, 2( θθθθ) A R1, 2( θθθθ) es: Observando las matrices como si estuviesen particionadas, incorporando el primer producto vemos tomando el caso de la diagonalización en R2 que la ecuación
utilizada en el capítulo 6 para matrices cuadradas simétricas del tipo se aplica en este caso con a = 2, b = -1 y c = 2, concluyéndose que: -2 tan 2 θ + (-1 – 2) tan θ + 2 = 0 o lo que es equivalente (muchos números negativos)
2 tan 2 θ + 3 tan θ - 2 = 0
De aquí se concluye, utilizando la ecuación de segundo grado que
tan θ = 1/ 2 Por lo tanto, utilizando un poco de trigonometría y el teorema de Pitágoras, apoyándonos en la siguiente figura de la izquierda, concluimos que: R1, 2( θθθθ) = = Algunos de los pasos en los cálculos se consignan a continuación. T
R1, 2( θθθθ) A R1, 2( θθθθ) = =
0
0
0 0 1
cos θθθθ sen θθθθ
-sen θθθθ cos θθθθ
2 2 1 2 -1 -2 1 -2 2
0
0
0 0 1
cos θθθθ -sen θθθθ
sen θθθθ cos θθθθ
cos θθθθ sen θθθθ
-sen θθθθ cos θθθθ
2 2 2 -1
-c tan 2 θ + (b – a) tan θ + c = 0
a c c b
√5 1 2
sen θ = √5/5 cos θ = 2√5/5
0
0
0 0 1
cos θθθθ - sen θθθθ
sen θθθθ cos θθθθ
0
0
0 0 1
2√5/5 - √5/5
√5/5 2√5/5
0
0
0 0 1
2√5/5 √5/5
- √5/5 2√5/5
2 2 1 2 -1 -2 1 -2 2
0
0
0 0 1
2√5/5 - √5/5
√5/5 2√5/5

Capítulo 7 Autovalores por matrices de rotación
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
223
223 223
= “Milagrosamente” apareció un 0 en la posición ( 3, 1 ) evitándonos la utilización de la matriz de rotación R1, 3( θθθθ). Apareció por supuesto por simetría, el 0 en la posición ( 1, 2 ) (y por simetría el 0 en la posición ( 1, 3 )). Lograremos ahora el 0 en la posición ( 3, 2 ) utilizando la matriz de rotación
Así:
R2, 3( θθθθ) =
= De nuevo, a partir del álgebra de matrices particionadas y observando el producto utilizamos la ecuación
utilizada en el capítulo 6 para matrices cuadradas simétricas del tipo con a = -2, b = 2 y c = -√5, concluyéndose que: √5 tan 2 θ + 4 tan θ - √5 = 0 Por lo tanto tan θ = 1/√5
0
-√5
1 -2 2
6√5/5 3√5/5
2√5/5 - 4√5/5
0
0
0 0 1
2√5/5 - √5/5
√5/5 2√5/5
3 0 0 0 -2 -√5 0 -√5 2
1 0 0
0
0
cos θθθθ - sen θθθθ
sen θθθθ cos θθθθ
1 0 0
0
0
cos θθθθ sen θθθθ
-sen θθθθ cos θθθθ
3 0 0 0 -2 -√5 0 -√5 2
1 0 0
0
0
cos θθθθ - sen θθθθ
sen θθθθ cos θθθθ
cos θθθθ sen θθθθ
-sen θθθθ cos θθθθ
-2 -√5 -√5 2
-c tan 2 θ + (b – a) tan θ + c = 0
a c c b

Capítulo 7 Autovalores por matrices de rotación
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
224
224 224
Nuestros argumentos trigonométricos, teniendo en cuenta el triángulo que dibujamos a continuación cuya hipotenusa se calcula por el teorema de Pitágoras, concluyen que: sen θ = √6/6 cos θ = √30/6 La transformación semejante ortogonal se calcularía así: T
R2, 3( θθθθ) A´ R2, 3( θθθθ) = = = Al diagonalizar aparecieron como por arte de magia, era de esperarse, dos autovalores, el –3 y el 3. En este caso no se presentó agrupado el autovalor 3 de multiplicidad 2 en el polinomio característico, ya que por esta ruta no calculamos primero los autovalores de E(λ=3) ya que no pasamos por el polinomio característico, en el cual dicho orden fue importante. Si efectuamos el producto R1, 2( θθθθ) R2, 3( θθθθ) Aparecerán autovectores ordenados de izquierda a derecha en las columnas del producto correspondientes en el mismo orden orden a los autovalores 3, -3, 3. Como se vé, el proceso de diagonalización permite calcular los autovalores y los autovectores, sin el cálculo previo de las raíces del polinomio característico. Este proceso muestra como se señalo antes que existen diferentes métodos, unos más convenientes que otros según el caso para hallar autovectores y autovalores. EJERCICIOS 1. Utilizando cualquiera de las descomposiciones calculadas en este texto para A =
√6 1 √5
1 0 0
0
0
√30/6 √6/6
- √6/6 √30/6
3 0 0 0 -2 -√5 0 -√5 2
1 0 0
0
0
√30/6 - √6/6
√6/6 √30/6
3 0 0 0 (-3√30)/6 (-√150 + 2√6)/6 0 -√6/6 √30/6
1 0 0
0
0
√30/6 - √6/6
√6/6 √30/6
3 0 0 0 -3 0 0 0 3
2 2 1 2 -1 -2 1 -2 2

Capítulo 7 Descomposición QR
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
225
225 225
Calcule A5. Ayuda: utilice la descomposición espectral.
2. Diagonalice las siguientes matrices simétricas utilizando una transformación ortogonal , , 3. Ulilizando la descomposición espectral de A = , calcule A20x , para x =
4. Diagonalice a las matrices simétricas (a) A =
42
21 (b)
−
76
62 (c)
−
−−
022
210
201
(d)
1612
129 (e)
111
111
111
(f)
−
−
324
262
423
(g)
113
131
311
(h)
31
13
utilizando matrices ortogonales de rotación. Halle en cada caso una matriz ortogonal Q, tal que QTAQ=D, en donde D es una matriz diagonal. Determine explícitamente los autovalores y halle una base para cada subespacio E( λ ). 7.7.- Descomposición QR Descomposición QR Hemos introducido las rotaciones de Givens con el fin de lograr transformaciones ortogonales para diagonalizar matrices simétricas. Tienen otras aplicaciones, entre ellas la posibilidad de factorizar cualquier matriz A mxn, no necesariamente cuadrada, en la forma QR, donde Q es una matriz ortogonal y R es una matriz triangular superior. Esto se establece en la siguiente proposición. Esta descomposición también se puede lograr utilizando el proceso de ortogonalización de Gram-Schmidt. Ejemplo Hallaremos la descomposición QR de A = Lograremos el primer 0 en la posición (2,1) de A, utilizando la matriz de Rotación Rθ1,2, donde θ se calcula por analogía así: Si utilizaramos Rθ1,2 =
Si A es una matriz con columnas linealmente independientes, entonces A se puede factorizar en la forma A = QR, en donde Q es una matriz mxn cuyas columnas forman una base ortogonal para el espacio columna de A = Gen(A1, A2,..., An), las Ai columnas de A, y R es una matriz triangular superior no singular .
2 0 1 6 2 0 -3 1 -1
cos θθθθ - sen θθθθ
sen θθθθ cos θθθθ
-3 1 0 1 -2 1 0 1 - 3
1 -1 0 - 1 1 0 1 - 2 2
2 5 - 1 4
1 1 1 1 1 1 1 1 1
2
4

Capítulo 7 Descomposición QR
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
226
226 226
Para lograr un 0 en la posición (2,1) de A = por medio de la premultiplicación Rθ1,2 A = = Debemos calcular θ, tal que a sen θ + c cos θ = 0 Dividiendo por cos θ y efectuando las simplificaciones y despejes convenientes, llegamos a: La ecuación ya no es la mas complicada ya que no utilizaremos postmultiplicaciones por R-1θ1,2 ( RTθ1,2 ), ya que no diagonalizaremos a la matriz = Sólo buscamos un 0 en la posición de c. En el caso que nos ocupa, nuestro 0 en la posición (2,1), se logra tomando c = 6, a = 2, donde c = 6 es el elemento a anular y a = 2 ≠ 0, es el “pivote”. Luego
tan θ = -6/2 = -3
De donde cos θ = √10 / 10, sen θ = - 3 √10 / 10 Pudo haber utilizado cos θ = - √10 / 10, sen θ = 3 √10 / 10, mas tendrá más números negativos para comenzar. Lo único que se exige es que no se incumplan las leyes de la trigonometría respecto a que: tan θ = sen θ / cos θ y sen 2 θ + cos2 θ = 1 A partir de los valores calculados, efectuaremos Rθ1,2 A = = = A1
Para lograr el 0 en la posición (3,1), utilizamos la matriz
Rθ1,3 =
a b c d
cos θθθθ - sen θθθθ
sen θθθθ cos θθθθ
a b c d
x x
a sen θ + c cos θ x
-c tan 2 θ + (b – a) tan θ + c = 0
tan θ = -c/a
√10 / 10 3 √10 / 10 0 - 3 √10 / 10 √10 / 10 0 0 0 1
2 0 1 6 2 0 - 3 1 - 1
2√10 3√10/ 5 √10/ 10 0 √10/ 5 -3√10/ 10 - 3 1 - 1
2 0 6 2
a b c d
cos θθθθ 0 - sen θθθθ
0 1 0
sen θθθθ 0 cos θθθθ

Capítulo 7 Descomposición QR
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
227
227 227
En donde Siendo c = -3, el elemento en posición (3,1) de A1 a anular y a = 2√10 el “pivote” en la posición (1,1) de dicha matriz. De allí se concluye que: sen θ = 3/7 y cos θ = 2√10 / 7 La siguiente operación será: Rθ1,3 A1 =
= = A2 En el próximo paso utilizando , en donde c = es el elemento en posición (3,2) de A2 a anular y a = √10 / 5, el “pivote” en la posición (2,2) de dicha matriz, concluimos que: tan θ = - 19/17 , sen θ = -19 / √410 , cos θ = 7 / √410, En consecuencia, utilizando
Rθ2,3 = Llegamos a:
Rθ2,3 A2 = = La cual es la matriz R triangular superior buscada.
La matriz, que denominaremos por conveniencia QT, es una matriz ortogonal por ser el producto de las matrices ortogonales de Givens ( el producto de matrices ortogonales es una matriz ortogonal), se deduce así: Como Rθ2,3 Rθ1,3 Rθ1,2 A = R, entonces tomando QT = Rθ2,3 Rθ1,3 Rθ1,2 , se concluye que QT A = R Por lo tanto A = Q R (Recuerde que ( Q T )-1 = Q por ser Q y Q T ortogonales). Calcularemos QT
QT = =
tan θ = -c/a
2√10 / 7 0 -3/7 0 1 0 3/7 0 2 √10 / 7
2√10 3√10/ 5 √10/ 10 0 √10/ 5 -3√10/ 10 - 3 1 - 1
7 9/7 5/7 0 √10/ 5 -3√10/ 10 0 19√10/ 35 - 17 √10/ 70
tan θ = -c/a
1 0 0
0
0
cos θθθθ - sen θθθθ
sen θθθθ cos θθθθ
1 0 0 0 7/√410 19/√410 0 -19/√410 7/ √410
7 9/7 5/7 0 √10/ 5 -3√10/ 10 0 19√10/ 35 - 17 √10/ 70 7 9/7 5/7
0 2√41/ 7 - 47√41/ 287 0 0 4 √41/ 41
√10 / 10 3 √10 / 10 0 - 3 √10 / 10 √10 / 10 0 0 0 1
2√10 / 7 0 -3/7 0 1 0 3/7 0 2 √10 / 7
1 0 0 0 7/√410 19/√410 0 -19/√410 7/ √410
2 / 7 6 / 7 -3/7 - 9/ 7√41 22/ 7√41 38/ 7√41 6 / √41 - 1/ √41 2 /√41

Capítulo 7 Descomposición QR. Matrices m x n
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
228
228 228
Se puede verificar que QR = A.
Como preámbulo a nuestra siguiente sección aplicaremos nuestro método, el cual reformaremos inmediatamente, en el siguiente ejemplo, a matrices no cuadradas. Ejercicios
1. Descomponga en forma QR, cada una de las siguientes matrices simétricas
2. (a) A =
42
21 (b)
−
76
62 (c)
−
−−
022
210
201
(d)
1612
129
(e)
111
111
111
(f)
−
−
324
262
423
(g)
113
131
311
(h)
31
13
utilizando matrices ortogonales de rotación. 7.8.- Descomposición QR. Matrices mxn Descomposición QR de matrices rectangulares La descomposición QR se aplica también a matrices rectangulares como se verá en el siguiente ejemplo. La aplicaremos básicamente a matrices con columnas linealmente independientes aun cuando también se puede utilizar en caso contrario. Ejemplo Factorizaremos a la matriz A = . Para lograr 0 en la posición (2,1) de A se utiliza Rθ1,2 = con tan θ = -3/4, sen θ = -3/5, cos θ = 4/5 Luego: Rθ1,2 A = = = A1
Para lograr un 0 en la posición (3,1) de A1, utilizamos
Rθ1,3 = , con tan θ = -1/5, sen θ = -1/√26, cos θ = 5/√26
Por lo tanto Rθ1,3 A1 = = = A2 Para lograr un cero en la posición (3,2) de A, utilizamos a Rθ2,3 con tan θ = 2/√26 , sen θ = 2/√30 , cos θ = √26/√30, así: Rθ2,3 A2 = = = R
4 1 3 2 1 0
cos θθθθ - sen θθθθ 0 sen θθθθ cos θθθθ 0 0 0 1
4/5 3/5 0 - 3/5 4/5 0 0 0 1
4 1 3 2 1 0
5 2 0 1 1 0
cos θθθθ 0 - sen θθθθ 0 1 0 sen θθθθ 0 cos θθθθ
5/√26 0 1/√26 0 1 0 -1/√26 0 5/√26
5 2 0 1 1 0
26/√26 10/√26 0 1 0 -2/√26
1 0 0 0 √26/√30 -2 /√30 0 2 /√30 √26/√30
26/√26 10/√26 0 1 0 - 2/√26
26/√26 10/√26 0 30/(√26√30) 0 0

Capítulo 7 Descomposición QR. Matrices m x n
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
229
229 229
Efectuando las operaciones respectivas de las rotaciones de Givens para calcular Q T y luego Q se puede concluir que: A = QR, en donde R es la matriz calculada arriba y Q = (1/5)(1/√26)( 1/√30) La descomposición QR también se realiza con matrices de Householder. Tiene una variedad de aplicaciones. La descomposición QR en el caso de matrices rectangulares mxn Estudiremos el caso m ≥ n. Esta es la situación mas usual e interesante, la cual requerirá ligeros, pero fundamentales cambios en nuestro método para que se aplique en este caso más general. Las modificaciones las veremos a partir del siguiente ejemplo: Sea
A = El ejemplo es escogido a propósito para ilustrar dificultades y modificaciones. En primer lugar, buscamos reducir a A a una matriz R en la cual los elementos debajo de la diagonal sean cero, de tal forma que sea “triangular superior” de la forma: R = Por lo tanto rij = 0, para i > j. Es evidente que el único “pivote” en la primera columna es el 1 en la posición (2,1), pero este elemento debe ser 0. No hay forma de lograrlo a no ser que cambiemos el orden de las columnas, cambiando por supuesto la matriz de arranque. Esto se reflejará posteriormente como una postmultiplicación por la matriz de permutación E21.
En lugar de iniciar nuestro algoritmo QR aplicado a A, lo aplicaremos a AP , donde P es una matriz de permutación. Iniciaremos por lo tanto con AP , donde P = E21 . Por supuesto que si nuestra primera columna fuese (0,0,0) estaríamos en problemas. En este caso tendría que estudiarse el caso en el problema específico, eliminando la primera fila o utilizando algún método relacionado con matrices particionadas para empezar la diagonalización a partir de la primera fila que no tenga todos sus elementos cero. No utilizaremos intercambio de filas . Comenzaremos nuestro ejemplo utilizando el algoritmo QR sobre la matriz AP = En nuestro proceso nos cuidaremos de no producir una fila de ceros en la parte superior a medida que se desarrolla el algoritmo, escogiendo con cuidado los “pivotes”. Por ello nuestra estrategia cambiará fundamentalmente. Nuestro proceso de descomposición, hasta ahora, ha seguido una estrategia parecida al método de Gauss (no confundirlo con el método de Gauss), escogiendo los pivotes en una secuencia de arriba hacia abajo y de izquierda a derecha.
20√30 -70 - 10√26 15√30 110 5 /√26 5√30 - 50 25√26
0 1 1 1 1 0 0 1 1 0 1 0
r11 r12 r13 0 r22 r23 0 0 r33 0 0 0
1 0 1 1 1 0 1 0 1 1 0 0

Capítulo 7 Descomposición QR. Matrices m x n
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
230
230 230
Nuestra nueva y general estrategia buscará los pivotes de izquierda a derecha pero de abajo hacia arriba. Buscaremos ceros en la primera columna pero eliminado primero el elemento en la posición (4,1) de A (la llamaremos A por comodidad, mas recuerde que es AP) El elemento a4,1 será reducido a 0, utilizando como pivote el elemento conveniente, diferente de 0, mas cercano a a4,1. En nuestro caso es a3,1= 1. Observando a A vemos que la matriz de rotación, como se ve en la figura debe actuar sobre la submatriz de A Esto nos obliga a utilizar la matriz de rotación Rθ3,4, en lugar de digamos Rθ1,4 la cual estaría quizás sugerida por las prácticas en nuestros ejemplos anteriores. Calculamos tan θ = -c/a = -1/1, sen θ = -1/√2, cos θ = 1/√2 Luego A1 = Rθ3,4 A = = Al introducir un 0 en la posición (4,1) hemos destruido el 0 de la posición (4,3). Las rotaciones de Givens a diferencia de otros procesos como el de Gauss, no cambian los elementos de una fila completa sino sobre una submatriz de orden 2. Sin embargo, estos cambios “minimizados” por las matrices de Givens, que las coloca como matrices importantes para los analistas numéricos, son inevitables. El proceso de Householder causa mayores “destrozos”. Estos “pequeños” e inevitables cambios son mas peligrosos cuando producen indeseados ceros, en este caso, ya que sabemos que tenemos que evitar la aparición de filas de ceros en la parte superior, ya que una fila de ceros no aporta “pivotes”, ni puede ser cambiada de lugar por intercambio de columnas, es decir por postmultiplicación por una matriz de permutación, que es el único cambio permitido por nuestro “modificado” algoritmo QR. Los ceros son bienvenidos sobretodo cuando conforman ceros en la parte aún no “diagonalizada”, mas no cuando nos dejan sin pivote en la parte superior ya que en lo posible queremos que la matriz R final tenga elementos diferentes de cero en la diagonal o que al menos tenga en la diagonal una sucesión contigua de elementos diferentes de 0. Si nuestra matriz R final tiene ceros “en la última parte de la diagonal, necesariamente es porque hay ceros en todas las filas de R de ahí en adelante, lo mismo que en las columnas subsiguientes, como sería el caso de la matriz presentada a continuación Continuando con el proceso a partir de la matriz A1. Debemos proceder ahora a triangulizar la submatriz El elemento a reducir a 0 , √2, está en la posición (3,1) de A1, el “pivote”, 1, en la posición (2,1). procedemos a utilizar Rθ2,3. Con nuestra fórmula usual tan θ = -c/a, con c= (A1)3,1 = √2, a = (A1)2,1 = 1, obtenemos:
tan θ = -√2/1, sen θ = -√2/√3 = -√6/3, cos θ = 1/√3 = √3/3. Continuando, A2 = Rθ2,3 A1 = =
1 0 1 0
1 0 1 0
1 0 1 1
1 0
0 1
1 0 0 0 0 1 0 0 0 0 √2/2 √2/2 0 0 -√2/2 √2/2
1 0 1 1 1 0 1 0 1 1 0 0
1 0 1 1 1 0 √2 0 √2/2 0 0 -√2/2
r11 r12 0 0 r22 0 0 0 0 0 0 0
1 1 √2 0
1 0 0 0 0 √3/3 √6/3 0 0 -√6/3 √3/3 0 0 0 0 1
1 0 1 1 1 0 √2 0 √2/2 0 0 -√2/2
1 0 1 √12/2 √3/3 √12/6 0 -√6/3 √6/6 0 0 -√2/2

Capítulo 7 Descomposición QR. Matrices m x n
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
231
231 231
Procederemos ahora a reducir el elemento √12/2 en la submatriz El pivote, elemento en posición (1,1) de A2 es 1. El elemento a reducir, √12/2 en la posición (2,1). Utilizamos la matriz de rotación Rθ1,2 para obtener A3 = Rθ1,2 A2. Por lo tanto
tan θ = -√12/2, sen θ = -√12/4 = -√3/2, cos θ = 2/4 = ½ Seguimos con: A3 = Rθ1,2 A2 = = Procederemos ahora a reducir el elemento -√6/3 en la submatriz El pivote, elemento en posición (2,2) de A3 es √3/6. El elemento a reducir, -√6/3, en la posición (3,2). Por lo tanto
tan θ = (√6/3)/(√3/3) = 2√2/1, sen θ = 2√2/3 , cos θ = 1/3 Seguimos con: A4 = Rθ2,3 A3 = = El ejemplo nos depara sorpresas. Se ha conservado el 0 en la posicion (4,2) que es como un “regalo”. Lo cual nos permite “sin más” terminar al proceso en la siguiente columna. La submatriz a triangularizar es El elemento a sustituir por cero no está en la primera columna de nuestra submatriz, sin embargo nuestro método funciona utilizando R3,4, la cual también utilizaríamos si el pivote estuviese en la posición (3,2) y quisiéramos lograr el 0 en la posición (4,2) en lugar de la (4,3), con pivote en (3,3) que es nuestro caso. Calculando de nuevo tan θ = (√2/2)/(-√6/6) = -√3/1, sen θ = -√3/2 , cos θ = 1/2 Proseguimos con: A5 = Rθ3,4 A4 = = Al fín hemos terminado este “largo” proceso y pensar que nuestra matriz era sólo de dimension 4x3. El autor hizo las operaciones “a pie”, con lápiz y papel. Cuánto se sufrió para mantener la aritmética exacta. Esto muestra que es indispensable utilizar computadores o al menos calculadoras programables para atacar aún problemas de ejemplo de pequeña dimensión. Pero aparece el error por redondeo o truncamiento. A estas alturas sugiero que se introduzca algo de Matlab o software similar y que se hable brevemente de error por redondeo. Desafortunadamente cada curso tiene su especificidad y su tiempo, regularmente no mas de 80 horas y es imposible entrar en dichos temas tan importantes para concluir bien poco a este nivel. Esperamos que a partir de esta lectura o de un curso con la orientación que se ha dado a éste en el texto, el cual sigue mis ideas respecto a
0 -√6/6 0 -√2/2
1 0 √12/2 √3/3
1/2 √3/2 0 0 -√3/2 1/2 0 0 0 0 1 0 0 0 0 1
2 1/2 1 0 √3/6 -√3/3 0 -√6/3 √6/6 0 0 -√2/2
√3/6 -√3/3 -√6/3 √6/6
1 0 1 √12/2 √3/3 √12/6 0 -√6/3 √6/6 0 0 -√2/2
1 0 0 0 0 1/3 -2√2/3 0 0 2√2/3 1/3 0 0 0 0 1
2 1/2 1 0 √3/2 -√3/3 0 0 -√6/6 0 0 -√2/2
2 1/2 1 0 √3/6 -√3/3 0 -√6/3 √6/6 0 0 -√2/2
1 0 0 0 0 1 0 0 0 0 1/2 √3/2 0 0 -√3/2 1/2
2 1/2 1 0 √3/2 -√3/3 0 0 -√6/3 0 0 0
2 1/2 1 0 √3/2 -√3/3 0 0 -√6/6 0 0 -√2/2

Capítulo 7 Descomposición QR. Matrices m x n
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
232
232 232
la enseñanza de las ciencias en los niveles básicos, los estudiantes aprecien y comprendan la importancia actual de los cursos de análisis o métodos numéricos. Es posible y altamente probable que nuestro proceso de descomposición nos obligue a intercambiar más columnas, lo cual se refleja en una matriz de permutación que postmultiplica a la matriz A. Aún en nuestro caso con una sóla permutación se cumple la fórmula:
En donde QT es la matriz ortogonal obtenida como producto de las rotaciones de Givens. P es la matriz de permutación y R es la forma triangular superior que se obtiene en el proceso. Para nuestro ejemplo QT = R3,4 R2,3 R1,2 R2,3 R3,4. De donde QT = A esta última matriz ortogonal la hemos llamado QT. Utilizando la ecuación anterior enmarcada en cuadro gris, al multiplicarla en ambos lados por Q (recuerde que Q es ortogonal, es decir que QQT = I), logramos la deseada forma: En nuestro caso Q es por supuesto
Q = (QT)T = y R = Por supuesto que
AP = QR (verifíquelo) Aplicación: solución de ecuaciones por mínimos cuadrados El sistema de ecuaciones y + z = 0 x + y = 1 y + z = 1 y = 0 evidéntemente no tiene solución. Pero debe tenerla por mínimos cuadrados. Planteemos A x = b, en donde
A = b =
Trabajaremos con la matriz
A =
1/2 1/2 1/2 1/2 -√3/6 √3/2 -√3/6 -√3/6 -√6/6 0 -√6/6 √6/3 √2/2 0 -√2/2 0
QTAP = R
AP = QR
1/2 -√3/6 -√6/6 √2/2 1/2 √3/2 0 0 1/2 -√3/6 -√6/6 -√2/2 1/2 -√3/6 -√6/3 0
0 1 1 1 1 0 0 1 1 0 1 0
0 1 1 0
1 0 1 1 1 0 1 0 1 1 0 0
2 1/2 1 0 √3/2 -√3/3 0 0 -√6/3 0 0 0

Capítulo 7 Descomposición QR. Matrices m x n
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
233
233 233
ya que nuestra solución QR permuto las dos primeras columnas. Así no tendremos que involucrar la matriz de permutación. Esto equivale a resolver el problema equivalente
y + z = 0 y + x = 1 y + z = 1 y = 0 Nuestro nuevo problema se plantea como, resolver por mínimos cuadrados Ax = b Ahora, como ya resolvimos la permutación de las columnas, lo escribiremos en base a la descomposición anterior: A = QR Y por lo tanto QRx = b El cual es equivalente, sin ganar ni perder soluciones, por premultiplicación por la matriz QT a: Rx = QTb La solución de este sistema por mínimos cuadrados, según la ecuación normal es: RTRx = RTQTb = (QR) T b = AT b El cual es ahora de solución inmediata ya que tenemos calculadas todas las matrices
ATb = = Vemos que en el lado izquierdo de RTRx = ATb, hay dos matrices “triangulares”. R “triangular” superior y RT
“triangular” inferior. Haciendo y = Rx, resolvemos por sustitución hacia delante RTy = ATb, es decir = Es decir Cuya solución es, sustituyendo hacia delante a partir de y1 = 1, y2 = √3/3 , y3 = -√6/6, y4 variable libre Procedemos a resolver, por sustitución regresiva o hacia atrás, el sistema, Rx = y, el cual se convierte en:
1 1 1 1 0 1 0 0 1 0 1 0
0 1 1 0
2 1 1
2 0 0 0 1/2 √3/2 0 0 1 -√3/3 -√6/3 0
y1
y2
y3
y4
2 1 1
2 y1 + 0 y4 = 2 1/2 y1 + √3/2 y2 + 0 y4 = 1
y1 - √3/3 y2 -√6/3 y3 + 0 y4 = 1
2 x1 + 1/2 x2 + 1 x3 = 1 √3/2 x2 -√3/3 x3 = √3/3 -√6/3 x3 = -√6/6 0 = y4

Capítulo 7 Descomposición QR. Matrices m x n
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
234
234 234
La última ecuación tiene sentido ya que y4 es variable libre. Con y4 = 0, tenemos, la solución por mínimos cuadrados: x1 = 0, x2 = 1, x3 = ½.
Este problema se pudo resolver utilizando la ecuación normal (generalmente inestable si se trabaja con métodos aproximados), eficiente con matemática exacta. Relación entre la descomposición QR y el proceso de ortogonalización de Gram-Schmidt Aprovechando el ejemplo anterior, presentamos una ruta alternativa, la cual no esquematizamos totalmente ya que es superada por la utilización de las matrices de Givens. Efectuaremos una descomposición QR de la matriz
A =
La descomposición QR basada en el método de ortogonalización de Gram-Schmidt, sigue el siguiente procedimiento. A partir de las columnas de A, se construye una base de su espacio columna C(A). Comenzando con las columnas de A; A1, A2, A3, en donde A1 = A2 = A3 = Iniciamos el proceso de ortogonalización con u1 = A1 . Normalizando a A1, obtenemos w1 = (1/ u1) u1. w1 = (1/2) A1 . Por lo tanto
w1 = Como w1 es de norma 1, hacemos u2 = A2 – (< A2 , w1 >/ < w1 , w1 >) w1 = A2 – < A2 , w1 > w1 = - (1/2) =
Como u2 = √((1/4)2 + (3/4)2 + (1/4)2 + (1/4)2) = √3 / 2 Normalizando a u2 obtenemos el nuevo vector w2 = ( 1/ u2 ) u2 = ( 1/ (√3 / 2)) u2 w2 = (2/√3) = , de donde
1 0 1 1 1 0 1 0 1 1 0 0
1 1 1 1
0 1 0 0
1 0 1 0
A1 = 2 w1
1/2 1/2 1/2 1/2
0 1 0 0
1/2 1/2 1/2 1/2
- 1/4 3/4 - 1/4 - 1/4
- 1/4 3/4 - 1/4 - 1/4
- √3 / 6 √3 / 2 - √3 / 6 - √3 / 6

Capítulo 7 Descomposición QR. Matrices m x n
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
235
235 235
A2 = u2 + < A2 , w1 > w1 = u2 w2 + < A2 , w1 > w1
Tomamos ahora u3 = A3 - < A3 , w1 > w1 - < A3 , w2 > w2 =(recuerde que w1 = w2 = 1
= - 1 - ( -√3 / 3) =
Como u3 = √6 / 3, hacemos
w3 = 1 / u3 = (3 / √6) u3 = (3√6 / 6) u3 = (√6 / 2) u3 = Luego A3 = u3 + < A3 , w1 > w1 + < A3 , w2 > w2 = u3 w3 + < A3 , w1 > w1 + < A3 , w2 > w2 . Por lo tanto
Una vez calculados los vectores base ortonormales en C(A), w1 = w2 = w3 = Completaremos esta base del espacio columna de A, C(A), con un vector fuera de tal subespacio que conforme con ellos una base ortogonal de R4. Hay que hallar un vector en R4 que no pertenezca a C(A). Un vector b = que no sea combinación lineal de las columnas de A. O sea tal que:
b = x1 A1 + x2 A2 + x3 A3,
no tenga solución. Es decir que = x1 + x2 + x3 no tenga solución. O sea que
No tenga solución. Esto evidentemente sucede si b1 ≠ b3. Podemos tomas por ello el vector unitario b = Debemos formar con w1 , w2 , w3 , y b, una base ortonormal, completándola así por Gram-Schmidt:
u4 = b - < b , w1 > w1 - < b , w2 > w2 - < b , w3 > w3 =
A2 = (1/2) w1 + (√3 / 2) w2
1 0 1 0
1/2 1/2 1/2 1/2
1/3 0 1/3 - 2/3
- √3 / 6 √3/ 2 - √3 /6 - √3 /6
√6 / 6 0 √6 /6 - √6 /3
A3 = w1 - (√3 / 3) w2 + (√6 / 3) w2
1/2 1/2 1/2 1/2
- √3 / 6 √3 / 2 - √3 / 6 - √3 / 6
√6 / 6 0 √6 / 6 - √6 / 3
b1
b2 b3 b4
x1 + + x3 = b1
x1 + x2 = b2 x1 + + x3 = b3
x1 = b4
b1
b2 b3 b4
1 1 1 1
0 1 0 0
1 0 1 0
1 0 0 0

Capítulo 7 Descomposición QR. Matrices m x n
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
236
236 236
- (1/2) + (√3 / 6) - (√6 / 6)
= . Como u4 = √2 / 2, tenemos: w4 = ( 2/√2 ) =
La matriz Q = [ w1, w2, w3, w4 ] , es una matriz ortogonal. Tomando en cuenta dicha matriz Q y los coeficientes que relacionan las columnas de A con las columnas de Q , que aparecieron en los cuadros enmarcados de esta sección, concluimos que:
=
Los coeficientes que aparecen en las expresiones de los vectores A1, A2, A3 como combinaciones lineales de los vectores ortogonales w1, w2, w3, w4 , que conforman que conforman a la matriz ortogonal Q, aparecen en ese mismo orden organizados por columnas en la matriz “triangular superior” R. Esta última descomposición no es exactamente la misma que se obtuvo utilizando las transformaciones de Givens, por lo cual concluimos que la descomposición QR no es única. Algunas aplicaciones de la descomposición QR
i) Si A es una matriz y se ha logrado la descomposición QR, en donde Q es una matriz ortogonal, un sistema de ecuaciones lineales Ax = b, se puede expresar como QRx = b y resolverse fácilmente por sustitución regresiva como Rx = Q Tb, ya que R es una matriz triangular superior.
ii) Si A es una matriz cuadrada, A = QR, donde Q es una matriz ortogonal, puede probarse que Q= 1 (a partir de la propiedad Q TQ = 1, y Q T= Q , esta ultima propiedad del determinante es válida para todas las matrices cuadradas). Luego A= Q R= Q R= R . Como R es una matriz triangular superior, su determinante se calcula fácilmente multiplicando los elementos de la diagonal.
iii) Si A es una matriz de dimensión mxn, m>n, con columnas linealmente independientes, descompuesta como A = QR, Q matriz ortogonal, R triangular superior (entendiendo como triangular superior de dimensión mxn a matrices como la de orden 3x2 del ejemplo anterior), la solución de Ax = b, como se dijo antes en i), está dada por Rx = Q Tb. La solución por mínimos cuadrados de Ax = b, sería la misma que la de Rx = Q Tb. La ecuación normal para este último problema sería RT Rx = R TQ Tb. A pesar de ser R una matriz rectangular de dimensión mxn, RT R es una matriz cuadrada. Puede probarse que la independencia lineal de las columnas de A implica la independencia lineal de las columnas de R y que por dicha independencia RT R es no singular. La solución de RTRx= R TQ Tb se simplifica por el hecho de que R es triangular superior.
iv) Es la base de un importante algoritmo para calcular autovalores. Si A = QR, entonces QTAQ = QT
(QR)Q = RQ. Por lo tanto RQ es semejante a QR, en consecuencia los autovalores de A = RQ son los mismos autovalores que los de QR. En esto se basa el Algoritmo QR para calcular autovalores, el cual bajo ciertas condiciones tiene éxito. Tal algoritmo procede así: a. Se descompone A en la forma QR b. Se procede a calcular RQ (Este calculo es inmediato) c. Haciendo A = RQ se procede de nuevo al paso
A medida que se repitan los pasos, bajo ciertas condiciones, los elementos debajo de la diagonal principal de la matriz A (sustituida por RQ en el paso c.) tienden a cero y los elementos de la diagonal a los autovalores de A.
1 0 0 0
1/2 1/2 1/2 1/2
- √3 / 6 √3 / 2 - √3 / 6 - √3 / 6
√6 / 6 0 √6 / 6 - √6 / 3
1/2 0 -1/2 0
1/2 0 -1/2 0
√2 / 2 0 - √2 / 2 0
2 1/2 1 0 √3/ 2 - √3/ 3 0 0 √6/ 3 0 0 0
1 0 1 1 1 0 1 0 1 1 0 0
1/2 1/2 1/2 1/2
- √3 / 6 √3 / 2 - √3 / 6 - √3 / 6
√6 / 6 0 √6 / 6 - √6 / 3
√2 / 2 0 - √2 / 2 0

Capítulo 7 Diagonalización
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
237
237 237
v) Al resolver un sistema sobredeterminado Ax = b de ecuaciones, por proyección ( aproximación por
mínimos cuadrados) se utiliza a menudo el siguiente método a. Se factoriza A = QR, con R triangular superior y Q ortogonal (QQT=I) b. Se calcula y = QTb c. Se resuelve Rx = y, por sustitución, ignorando las entradas que no pertenecen a las columnas de
la matriz original A. Q se puede obtener por el método de Gram-Schmidt (modificado si no se quiere acarrear la inestabilidad) sobre las columnas de A, las cuales se completan para obtener la base ortonormal que conformará a Q. La matriz R contiene los coeficientes del proceso de ortogonalización de Gram-Schmidt). En la práctica se utilizan matrices de rotación o transformaciones de Householder para obtener Q.
Ejercicios 1. Halle factorizaciones QR de las siguientes matrices utilizando las transformaciones de Givens: a) b) c) 2. Halle factorizaciones QR de las matrices anteriores, utilizando el método de ortogonalización de Gram-Schmidt.
3. Halle por cualquier método la descomposición QR de A =
102
230
321
7.9.- Diagonalización DIAGONALIZACION DE MATRICES NO SIMÉTRICAS Estudiaremos ahora por medio de dos ejemplos el caso de la diagonalización de matrices no simétricas. Ejemplo 1 Utilizaremos el polinomio característico para diagonalizar la matriz A = En este caso = (1-λ) = = (1-λ) ( (λ-2) (λ+1) + 2 ) = (1-λ) ( λ2 - λ ) = (1-λ) λ ( λ - 1 ) = - λ ( λ - 1 )2 De - λ ( λ - 1 )2 = 0, concluimos que los autovalores son: λ = 0, de multiplicidad 1 y λ = 1, de multiplicidad 2 Estudiemos E(λ = 0). Partiremos de Ax = 0x
2 -2 -1 0 1 0 2 -4 -1
2-λ -2 -1 0 1-λ 0 2 -4 -1-λ
2-λ - 1 2 -1-λ
Hemos utilizado
1-λ y su cofactor
-12 1 4 0 3 3
- 6 2 8 4
12 -3 1 -3 1 2 4 -4/3 -1

Capítulo 7 Diagonalización
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
238
238 238
O de manera equivalente Restando a la tercera ecuación la primera, llegamos a: Este sistema se reduce por lo tanto a : y = 0 2 x – z = 0 Concluyéndose que: x = (1/2) z , y = 0 Una solución general será por lo tanto = = = z Por lo tanto E(λ = 0) es un subespacio de dimensión 1, generado por Para nuestra comodidad cambiaremos el vector generador por ( el doble del anterior) La multiplicidad algebraica y geométrica de λ es la misma, lo cual conviene a nuestro proceso. Estudiaremos ahora el autovalor λ = 1 Al resolver A x = x Llegamos a: En consecuencia Este sistema se reduce por lo tanto a : x = 2y + z Concluimos que una solución general es: = + = y + z
2x - 2 y - z = 0 y = 0 2x - 4y - z = 0
2x - 2 y - z = 0 y = 0 - 2y = 0
x y z
(1/2) z 0 1
(1/2) z 0 z
(1/2) 0 1
(1/2) 0 1
1 0 2
x - 2 y - z = 0 y = y 2x - 4y – 2z = 0
2x - 2 y - z = x y = y 2x - 4y - z = z
x y z
2 y y 0
z 0 z
2 1 0
1 0 1

Capítulo 7 Diagonalización
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
239
239 239
La base buscada para E(λ=1) está formada por los vectores y De nuevo, la multiplicidad geométrica de E(λ=1) , que es 2, es la misma que la algebraica. Los vectores v1 = v2 = v3 = Forman una base de R3. Por lo tanto la matriz es la matriz buscada. Corresponde al lector comprobar que - 1 = Es decir, que la transformación semejante encontrada, diagonaliza a la matriz A. Es inutil tratar de hallar una matriz ortogonal que diagonalize a la matriz A, como se hizo en el caso de las matrices simétricas ya que aquí no se cumple necesariamente la condición 3 del teorema espectral para matrices simétricas, ya que A, en este caso, no es simétrica. Por lo tanto los vectores de E(λ=0) no son necesariamente ortogonales a los vectores de E(λ=1). En particular: El vector generador de E(λ=0), no es ortogonal a ninguno de los vectores base de E(λ=1), como puede comprobarse de los productos internos: T T
= 3 ≠ 0 = 2 ≠ 0
Las matrices ortogonales de rotación tan convenientes en el caso de las matrices simétricas, producen al aplicarlas como transformaciones semejantes un 0 en posición ( i, j ), mas no precisamente un cero en la posición ( j, i ).
1 0 1
2 1 0
1 0 2
1 0 1
2 1 0
1 1 2 0 0 1 2 1 0
0 0 0 0 1 0 0 0 1
1 1 2 0 0 1 2 1 0
1 1 2 0 0 1 2 1 0
2 -2 -1 0 1 0 2 -4 -1
1 0 2
1 0 1
2 1 0
1 0 2
1 0 1
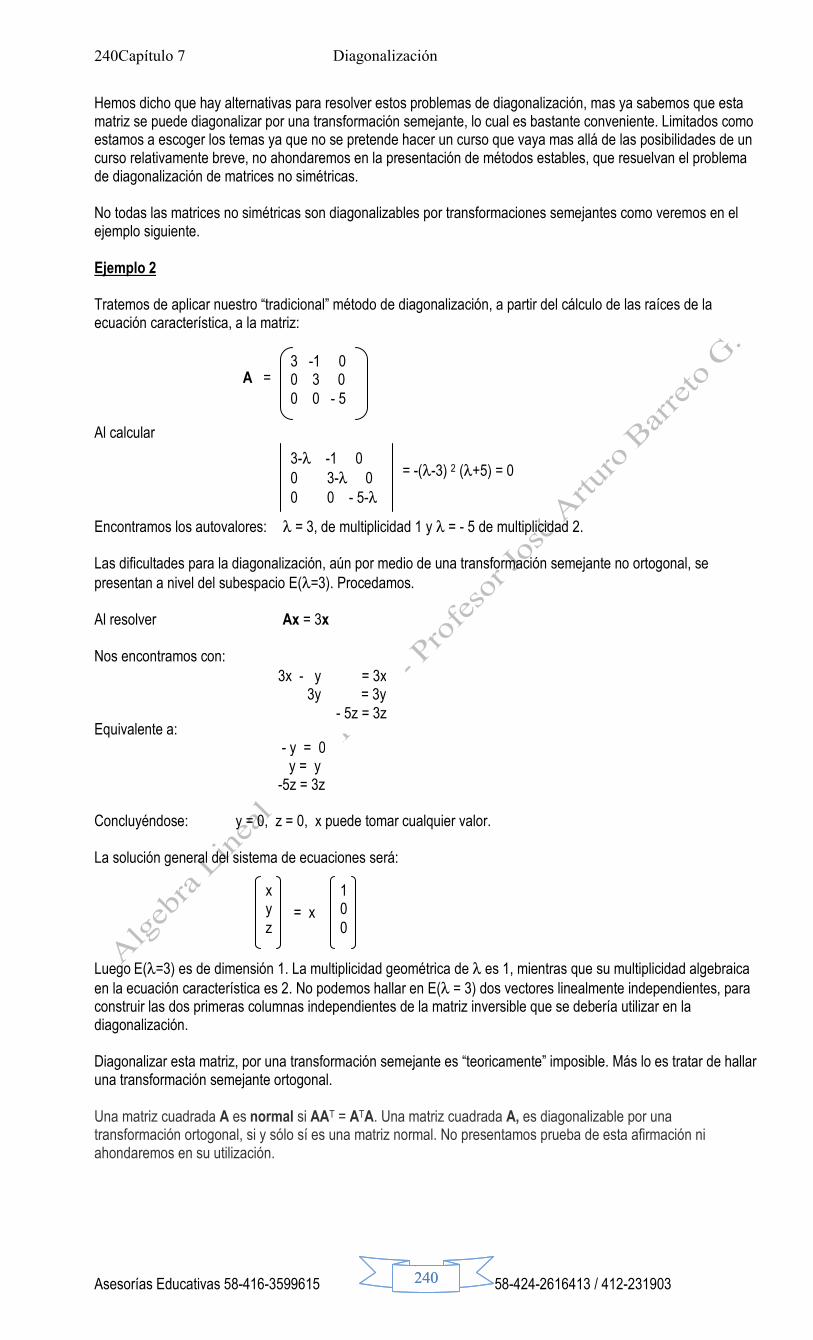
Capítulo 7 Diagonalización
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
240
240 240
Hemos dicho que hay alternativas para resolver estos problemas de diagonalización, mas ya sabemos que esta matriz se puede diagonalizar por una transformación semejante, lo cual es bastante conveniente. Limitados como estamos a escoger los temas ya que no se pretende hacer un curso que vaya mas allá de las posibilidades de un curso relativamente breve, no ahondaremos en la presentación de métodos estables, que resuelvan el problema de diagonalización de matrices no simétricas. No todas las matrices no simétricas son diagonalizables por transformaciones semejantes como veremos en el ejemplo siguiente. Ejemplo 2 Tratemos de aplicar nuestro “tradicional” método de diagonalización, a partir del cálculo de las raíces de la ecuación característica, a la matriz: A = Al calcular = -(λ-3) 2 (λ+5) = 0 Encontramos los autovalores: λ = 3, de multiplicidad 1 y λ = - 5 de multiplicidad 2. Las dificultades para la diagonalización, aún por medio de una transformación semejante no ortogonal, se presentan a nivel del subespacio E(λ=3). Procedamos. Al resolver Ax = 3x Nos encontramos con: Equivalente a: Concluyéndose: y = 0, z = 0, x puede tomar cualquier valor. La solución general del sistema de ecuaciones será: = x Luego E(λ=3) es de dimensión 1. La multiplicidad geométrica de λ es 1, mientras que su multiplicidad algebraica en la ecuación característica es 2. No podemos hallar en E(λ = 3) dos vectores linealmente independientes, para construir las dos primeras columnas independientes de la matriz inversible que se debería utilizar en la diagonalización. Diagonalizar esta matriz, por una transformación semejante es “teoricamente” imposible. Más lo es tratar de hallar una transformación semejante ortogonal. Una matriz cuadrada A es normal si AAT = ATA. Una matriz cuadrada A, es diagonalizable por una transformación ortogonal, si y sólo sí es una matriz normal. No presentamos prueba de esta afirmación ni ahondaremos en su utilización.
3 -1 0 0 3 0 0 0 - 5
3-λ -1 0 0 3-λ 0 0 0 - 5-λ
3x - y = 3x 3y = 3y - 5z = 3z
- y = 0 y = y -5z = 3z
x y z
1 0 0

Capítulo 7 Diagonalización
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
241
241 241
EJERCICIOS 1. Demuestre que la matriz no se puede diagonalizar por una transformación semejante, utilizando
los dos siguientes métodos:
a) Demuestre que su único autovalor es 1, de multiplicidad algebraica 2 y que E(λ=1) es de dimensión 1, y por lo tanto no se podrá hallar en E(λ=1) dos autovectores linealmente independientes. Complete el argumento si lo considera necesario.
b) Trate de descomponer a dicha matriz, como
-1 =
y llegue a una contradicción. 2. Halle una transformación semejante que diagonalice a cada una de las siguientes matrices A. De paso calcule
los subespacios E(λ). En cada caso calcule A 6 utilizando la descomposición A=HDH-1. Sugerencia A6 = HD6H-1.
(a) , (b)
−−−
−
663
222
221
(c)
−−−
133
353
331
(d)
−−−
−
3021
0341
0050
0005
3. Diagonalice cada una de las siguientes matrices, por una transformación semejante. Si la matriz no es diagonalizable, indique por qué.
(a)
−
−
384
110
222
(b)
100
100
111
(c)
−
−
500
032
023
(d)
− 8174
100
010
OTRAS APLICACIONES DE LA DIAGONALIZACIÓN
1. Asuma que una matriz cuadrada A se ha diagonalizado por una transformación semejante, de modo que:
En tal caso A2 = HDH-1HDH-1= HDDH-1 = HD2H-1
A3 = A2A= HD2H-1HDH-1= HD3H-1 En general, en este caso An = HDnH-1 Permitiendo un fácil calculo de An para cualquier potencia entera positiva n. Ejemplo A partir de la diagonalización de la matriz A =
= = HDH-1
Calculamos A100 = HD100H-1 En donde
D100 =
1 1 0 1
a b c d
1 1 0 1
a b c d
e 0 0 f
-1 -1 1 0 -2 1 0 0 -1
A = HDH-1, en donde D es una matriz diagonal
λ1 0 0 ... 0 0 λ2 0 ... 0 . . . . . 0 0 0 ... λn
2 5 -1 - 4
-5 1 1 - 1
1 0 0 - 3
-1/4 - 1/4 –1/4 - 5/4
2 5 -1 - 4
1100 0 0 (-3)100

Capítulo 7 Diagonalización
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
242
242 242
Para potencias altas de A este método es sustancialmente práctico. Este método se aplica también para todo tipo de polinomios: Si queremos evaluar p(A) = 2I + 3A - (1/2)A2 , evaluaremos
H p(D) H-1 = H H-1 = H H-1
Lo mismo respecto a funciones tales como sen (A) = H H-1 Lo mismo se extiende a todo tipo de funciones. 2. La siguiente aplicación relaciona los temas de diagonalización con las cadenas de Markov
La matriz T = es una matriz de transición regular en el sentido que se definió en el capítulo 1. Es decir tal que T k, para algún k > 0, está conformada por números positivos. En este caso k = 1. También señalamos en el capítulo 1 que Tn, si T es estocástica regular, tiende a una matriz con todas sus columnas iguales (repase el ejemplo del capítulo 1). También hablamos allí de los vectores de estado. El inicial x0, el siguiente x1, con la propiedad x1 = Tx0
La matriz T n tiende a una matriz con todas sus columnas iguales a medida que n crece, tal como se verifica en el ejemplo del capítulo 1. Ejemplificaremos esto en el caso sencillo de la matriz estocástica regular T señalada arriba. Para observar la convergencia cuando n crece, diagonalizaremos tal matriz. Los valores propios son λ1 = 1 y λ2 = 0,3 (calcúlelos utilizando el polinomio característico) Los subespacios E(λ) son por supuesto de dimensión 1 (no les queda alternativa en este ejemplo) Escoja en E(λ=1) la base v1 = y en E(λ=0.3) la base v2 = Se tiene por lo tanto que: T = = V V-1 En donde V es la matriz cuyas columnas son v1 y v2. Por lo tanto Tn = V V-1 = V V-1
Cuando n → ∞ , 0.3n → 0
Por ello Tn → V V-1.
2+3(1)-(1/2)12 0 0 2 + 3(-3) – (1/2)(-3)2
9/2 0 0 -23/2
sen(1) 0 0 sen(-3)
0.6 0.3 0.4 0.7
3/7 4/7
1 -1
0.6 0.3 0.4 0.7
1 0 0 0.3
1n 0 0 0.3n
1 0 0 0.3n
1 0 0 0

Capítulo 7 Diagonalización por bloques. La forma de Jordan
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
243
243 243
La estructura de la matriz diagonal involucrada se comentará mas adelante. En consecuencia, la matriz estocástica Tn converge, a una matriz que calcularemos en nuestro ejemplo. En nuestro caso V = . Por lo tanto V-1 = Por lo tanto Tn →
Confirmandose que Tn tiende a una matriz con sus columnas iguales. El vector es precisamente un vector que se denomina vector de estado estacionario y es nada menos que el autovector que satisface Tx = x, con la condición añadida de que la suma de sus componentes da 1 ( el 100%). Por ello se prefirió al autovector Que es también elemento de E(λ=1) pero que no puede ser un vector de estado. Por supuesto que el calculo del vector de estado estacionario, pasa por i) Hallar un autovector de E(λ=1)
ii) Normalizarlo, de tal manera que la suma de sus componentes sea igual a 1 (100%) iii) Ese es el vector de estado estacionario, al cual tenderá la distribución final del mercado de
mantenerse la tendencia señalada por la matriz de transición T (revise de nuevo el ejemplo presentado en el capítulo 1)
Es importante anotar que en el caso de las matrices de transición regulares, el número 1 es el autovalor dominante, es decir el autovalor λk de mayor valor absoluto, es decir, tal que λk > λi para todo otro autovalor λi.
Es por ello que los demás autovalores son de valor absoluto menor que 1 y por lo tanto convergen a 0, en Dn, a medida que n crece, tal como paso con el autovalor 0.3 del ejemplo. Ejercicios 1) Para la matriz estocástica T = halle el vector de estado estacionario correspondiente al
autovalor dominante λ = 1. Compruebe que este es 2) Las siguientes matrices fueron diagonalizadas en este capítulo. Para cada una de ellas calcule A4
utilizando la diagonalización y efectuando la operación sobre la transformación semejante y también por multiplicación directa como AAAA.
a) | b) 7.10.- Diagonalización por bloques. La forma de Jordan Diagonalizaremos la matriz anterior en forma de bloques (diagonal por bloques) en la que es conocida como descomposición de Jordan la cual nos permitirá avanzar sobre el estudio teórico y aplicaciones para matrices no diagonalizables. En la práctica la obtención de la matriz de Jordan presenta dificultades numéricas respecto a la estabilidad.
3/7 1 4/7 - 1
1 1 4/7 - 3/7
3/7 3/7 4/7 4/7
3/7 4/7
3 4
.3 .4 .5
.3 .4 .3
.4 .2 .2
.3888....
.3333 ...
.2777 ...
Concluya que si n→∞, Tn →
.3888... .333... .2777...
.3888... .333... .2777...
.3888... .333... .2777...
2 -2 -1 0 1 0 2 -4 -1
2 2 1 2 -1 -2 1 -2 2

Capítulo 7 Diagonalización por bloques. La forma de Jordan
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
244
244 244
De nuestra matriz
A = no simétrica, ni diagonalizable por una transformación semejante, hemos calculado los autovalores:
λ = 3, de multiplicidad algebraica 2 (Su multiplicidad geométrica 1 < 2, es la fuente de nuestros males)
y λ = - 5 de multiplicidad algebraica 1
En E(λ=5) podremos calcular un autovector, para obtener la tercera columna de nuestra matriz de semejanza, así: Comencemos: Ax = - 5x = - 5 Luego De donde z es una variable libre, y = 0 y x = 0. por Gauss- Jordan: Completando estas ecuaciones con z = z Hallemos la solución general = z Como era de esperarse
λ = - 5 tiene multiplicidad geométrica 1 La tercera columna de nuestra transformación semejante será el vector v3 = He aquí el método, denominado algoritmo de Filipov que nos permitirá hallar las dos primeras columnas independientes de la transformación semejante: A partir del vector v1 = generador de E(λ=3), buscamos un autovalor generalizado, v2, el cual debe cumplir la ecuación
3 -1 0 0 3 0 0 0 - 5
3 -1 0 0 3 0 0 0 - 5
x y z
x y z
8x - y = 0 8y = 0
0z = 0
x = 0 y = 0
x y z
0 0 1
0 0 1
1 0 0

Capítulo 7 Diagonalización por bloques. La forma de Jordan
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
245
245 245
A v2 = v1 + 3 v2
Procederemos a resolver: = + 3 Obteniendo En consecuencia: y = - 1, z = 0, x es variable libre Tomando x = 1, hallamos el autovector generalizado v2 = Los vectores v1 = v2 = v3 = Resultan ser linealmente independientes. La matriz V = Diagonaliza por bloques a A, ya que calculando
V-1AV obtenemos = La matriz así obtenida es triángular por bloques. La dimensión de cada bloque está determinada por el mismo algoritmo de Filipov, de una manera sorprendente. El algoritmo de Filipov podría intentar ampliar la “cadena” de autovectores generalizados correspondientes al autovalor λ = 3, así: Hallar un autovector generalizado v3 por medio de la ecuación:
A v3 = v2 + 3 v3
Debemos resolver = + 3 Por lo tanto resolveríamos Este sistema no tiene solución. No se puede ampliar el bloque utilizando autovectores generalizados. Para ilustrar mas la forma de Jordán utilizaremos el siguiente ejemplo.
x y z
3 -1 0 0 3 0 0 0 - 5
1 0 0
x y z
- y = 1 3y = 3y -5z = 3z
1 -1 0
1 0 0
1 -1 0
0 0 1
1 1 0 0 -1 0 0 0 1
1 1 0 0 -1 0 0 0 1
3 -1 0 0 3 0 0 0 - 5
1 1 0 0 -1 0 0 0 1
3 1 0 3
0 0
0 -5
x y z
3 -1 0 0 3 0 0 0 - 5
1 -1 0
x y z
y = 1 0 = -1 -5z = 3z

Capítulo 7 Algoritmo de Filipov
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
246
246 246
Ejemplo Hallar la forma de Jordan de la matriz A = Por su forma triangular por bloques, concluimos que λ = 3 es un autovalor de multiplicidad algebraica 3. Al resolver Ax = 3x, es decir = 3 Caemos en Solución general = x + z E(λ=3) tiene dimensión 2, pero λ = 3 tiene multiplicidad algebraica 3. Siguiendo el algoritmo de Filipov, que a continuación se aplica, buscamos un autovector generalizado para completar el tercer autovector que complete a y Este autovector debe ser linealmente independiente de los dos anteriores y en consecuencia, no se consigue en E(λ=3). 7.11.- Algoritmo de Filipov Tomando el segundo vector v2, buscamos un vector v3 tal que
A v3 = v2 + 3 v3
Resolvemos = + 3 Concluyendo que:
3 -1 1 0 0 3 0 0 0 0 3 0 0 0 0 - 5
3 -1 1 0 0 3 0 0 0 0 3 0 0 0 0 - 5
x y z ww
x y z ww
- y + z = 0 -8w = 0
y = z x , z variables libres w = 0
x y z w
1
0
0 0
0
1
1 0
1
0
0 0
0
1
1 0
3 -1 1 0 0 3 0 0 0 0 3 0 0 0 0 - 5
x y z w
0
1
1 0
x y z w
- y + z = 3x 0 = 1 0 = 1 - 8w= 0

Capítulo 7 Algoritmo de Filipov
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
247
247 247
No hay solución!. El algoritmo de Filipov no puede aportar un tercer autovector ,generalizado, partiendo de v2. Sin embargo, el proceso funcionará si buscamos tal autovector generalizado a partir de v1.
Resolvamos Av2 = v1 + 3v2 O sea = + 3 Por lo tanto Tomando x = 0, z = 1, obtenemos por sustitución y = 0, w = 0, encontrando el vector v2 = A partir del autovector v1, hemos encontrado un autovector generalizado v2. Tratemos de seguir la cadena de autovectores generalizados, tratando de resolver
Av3 = v2 + 3v3
Es decir = + 3 Arribamos a: El cual es un sistema inconsistente. Esta cadena de autovalores generalizados, se terminó, no es posible hallar uno que siga en dicha secuencia. Lo interesante del algoritmo es que:
1. λ = 3 tiene a 3 como multiplicidad algebraica 2. El subespacio E(λ=3), tiene sólo dimensión 2 3. A partir de uno de los vectores base de E(λ=3), construimos un autovector generalizado. 4. El conjunto v1, v2, v3, en donde
a. v1 es un autovalor de A (uno de los elementos de la base de E(λ= 3) b. v2 es un autovector generalizado obtenido a partir de , v1 c. v3 es un autovalor de A (otro elemento de la base de E(λ= 3)
es un conjunto de 3 vectores linealmente independientes ( tantos como la multiplicidad de λ.
Hemos obtenido las tres primeras columnas de la matriz no singular que se utilizará en la transformación semejante.
3 -1 1 0 0 3 0 0 0 0 3 0 0 0 0 - 5
x y z w
1
0
0 0
x y z w
- y + z = 1 3y = 3y 3z = 3z - 5w = 3w
x, z variables libres w = 0 y –1 + z
0
0
1 0
3 -1 1 0 0 3 0 0 0 0 3 0 0 0 0 - 5
x y z w
0 0 1 0
x y z w
- y + z = 0 3y = 3y 3z = 1 + 3z - 5w = 3w

Capítulo 7 Algoritmo de Filipov
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
248
248 248
La cuarta columna la aportará un autovalor correspondiente a λ = - 5. Bastará con 1 ya que λ = - 5 tiene multiplicidad algebraica 1. Resolvamos Ax = - 5x En tal caso
= - 5 Por lo tanto Entonces Una solución general será: = w Hemos encontrado la cuarta columna de la matriz no singular que nos permitirá definir la transformación semejante, el generador de E(λ=-5) v4 = La matriz no singular buscada será: V = Efectuando la transformación semejante, hallamos que V –1 A V = = toda matriz cuadrada puede ser diagonalizada por bloques. Los bloques de Jordan se construyen de la siguiente manera:
1. Se busca una base para cada subespacio subespacio E(λ). 2. Si la dimensión de E(λ) es menor que su multiplicidad algebraica, tome cada uno de los vectores de una
base de E(λ). y construya a partir de cada uno de ellos una cadena siguiendo el algoritmo de Filipov, si tal cadena existe.
3. Si un autovector no genera una cadena, es decir no tiene un autovector generalizado, aparecerá como un
bloque de orden 1, entre los bloques de Jordán, relacionados con λ. Cada autovector que genere una
3 -1 1 0 0 3 0 0 0 0 3 0 0 0 0 - 5
x y z ww
x y z ww
3x – y + z = -5 x 3y = -5y 3z = -5z - 5w = -5w
Por lo tanto: 8x - y + z = 0 y = z = 0, w variable libre
x = y = z = 0 w variable libre.
x y z ww
0 0 0 1
0 0 0 1
1 0 0 0 0 0 1 0 0 1 1 0 0 0 0 1
1 0 0 0 0 0 1 0 0 1 1 0 0 0 0 1
3 -1 1 0 0 3 0 0 0 0 3 0 0 0 0 - 5
1 0 0 0 0 0 1 0 0 1 1 0 0 0 0 1
3 1 0 3
3
-5

Capítulo 7 Algoritmo de Filipov
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
249
249 249
4. cadena de autovectores generalizados siguiendo el algoritmo de filipov, aportará a la descomposición un bloque de la forma.
5. Los bloques de Jordan así obtenidos tienen la dimensión correspondiente a la cadena formada por cada autovector de E(λ).
6. Si existen k autovectores linealmente independientes en E(λ), cada uno de ellos producirá un bloque de Jordan de orden nk y ∑ nk = multiplicidad algebraica del autovalor λ
He aquí algunas descomposiciones de Jordan que podrían presentarse para una matriz de orden 6, con 2 autovalores: λ = 2, de multiplicidad 2, λ=3 de multiplicidad 4. La forma en cada caso la señalaría el algoritmo de Filipov. 7.12.- Aplicaciones de la diagonalización por bloques Polinomios de matrices Examinando el ejemplo anterior veremos algunas de las consecuencias que se pueden derivar de la diagonalización por bloques de Jordan. Recuerde que si la matriz es diagonalizable, los bloques de Jordan son de orden 1 y la descomposición de Jordán será una diagonalización. En este caso el algoritmo de Filipov no arrojará autovectores generalizados. Examinemos la descomposición de Jordan de nuestra última matriz de ejemplo, la cual fué
λ 1 0 0 0 0 λ 1 0 0 0 0 λ 1 0 0 0 0 λ 1 0 0 0 λ λ
Ejemplo de bloque de Jordan de orden 5
2 1 0 2
3 1 0 0 0 3 1 0 0 0 3 0 0 0 0 3
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
2 0 0 2
3 1 0 0 0 3 1 0 0 0 3 1 0 0 0 3
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
2 0 0 2
3 1 0 0 0 3 1 0 0 0 3 1 0 0 0 3
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
2 1 0 2
3 1 0 0 0 3 0 0 0 0 3 1 0 0 0 3
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
3 1 0 3
3
-5

Capítulo 7 Algoritmo de Filipov
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
250
250 250
La forma de Jordán es evidetemente una matriz diagonal por bloques. Si escribimos tal matriz en la forma D = , tendremos D2 = Vemos que cada bloque es elevado al cuadrado. En general Dn = Además, cada bloque Dii es o diagonal o triangular superior, por lo tanto cada potencia Dnii es fácil de calcular. Se pueden definir además polinomios de matrices, asi: Sea A = VDV-1, donde D es una matriz diagonal por bloques. Sea p(x) = a0 + a1x + a2x2 + a3x3
Definimos p(A) = a0 + a1A + a2A2 + a3A3 Se puede concluir que
p(A) = Vp(D)V-1 = es una matriz diagonal por bloques. Los p(Dii) son mas sencillos de calcular en el caso de la descomposición de Jordan, ya que los bloques básicos o son de orden 1, o matrices triangulares superiores con abundancia de ceros tanto sobre la diagonal, como bajo ella, dependiendo de la dimensión de cada bloque básico. Recuerde que para matrices de orden mayor, un bloque básico de Jordan podría parecerse a: En realidad son tipos de matrices de banda. Cálculo de autovalores
D11 0 0 0 D22 0 0 0 D33
D 211 0 0 0 D 222 0 0 0 D 2 33
D n11 0 0 0 D n22 0 0 0 D n 33
p(D11) 0 0 0 p(D22) 0 0 0 p(D33)
λ 1 0 0 0 0 λ 1 0 0 0 0 λ 1 0 0 0 0 λ 1 0 0 0 0 λ

Capítulo 7 Algoritmo de Filipov
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
251
251 251
Si la descomposición de Jordan o una descomposición similar, diagonal por bloques, con las propiedades convenientes, se hiciese por vías diferentes, sin pasar por el cálculo del polinomio característico, de ella podrían derivarse los autovalores con su multiplicidad algebraica y geométrica. Cálculo del determinante El determinante de una matriz es igual al determinante de su forma de Jordan puesto que:
det(A) = det (VDV-1) = det(V) det (D) det (V-1) = det (D). (ya que det(V-1) = 1/det(V)). El determinante de V es por lo tanto el producto de sus autovalores, teniendo en cuenta multiplicidades ya que los bloques de Jordan son matrices triangulares superiores y
det(A-λI) = det(VDV-1 - λ I) = det ( VDV-1 - λ VIV-1) = det (V) det (D - λI) det (V-1) = det (D - λI) Vemos que las transformaciones semejantes también conservan al polinomio característico. Verificación del teorema de Cayley-Hamilton El teorema de Cayley-Hamilton establece que si
p(λ) = a0 + a1λ + a2λ2 + .... + anλn
es el polinomio característico de una matriz A, entonces dicha matriz lo satisface, es decir que
p(A) = a0 + a1A + a2 A2 + .... + an An = 0 La verificación para nuestra matriz ejemplo sigue los pasos de la demostración general de dicho teorema. Sea A la matriz cuya forma de jordan fue calculada como:
D = Se ha dicho que p(A) = p(D), debemos por lo tanto verificar que p(D) = 0. El polinomio característico de A es el mismo que el de su forma de Jordan D. Procederemos a calcularlo a partir de D.
3 1 0 3
3
-5
3-λ 1 0 0 0 3-λ 0 0 = - (λ - 3)3 ( λ + 5) 0 0 3-λ 0 0 0 0 3-λ

Capítulo 7 Algoritmo de Filipov
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
252
252 252
Estudiemos p(D) = (D – 3)3 (D + 5)
p(D) = 3 Mas (D11- 3)3 = = Luego
p(D) = = = 0
Ejercicios 1. El polinomio mínimo de una matriz A, es el polinomio de menor grado (salvo constantes), p(x),
tal que p(A) = 0. Por el teorema de Cayley-Hamilton, sabemos que si p(x) es el polinomio característico de A, entonces p(A) = 0, por lo tanto el polinomio mínimo es de grado menor o igual al polinomio característico. Se concluye además que el polinomio mínimo m(x) divide al polinomio característico.
La siguiente matriz es triangular superior por bloques por bloques
T =
−
1000
1200
2021
1002
=
Por tal razón el polinomio característico de T es el producto de los polinomios característicos de T11 y T22. Es por lo tanto ( λ -2)2 ( λ -2) ( λ -1) = ( λ -2)3( λ -1)
Las posibilidades del polinomio mínimo serán: p1( λ ) = ( λ -2) ( λ -1), p2( λ ) = ( λ -2)2 ( λ -1), p3( λ ) = ( λ -2)3 ( λ -1). a) Verifique que p1(T) ≠ 0, y p2(T) = 0. Por lo tanto el polinomio mínimo de T es ( λ -2)2 ( λ -1). b) Halle el polinomio mínimo de cada una de las siguientes matrices
i)
400
031
003
ii)
300
031
003
iii)
310
031
003
iv)
200
260
122
v)
−−−
−−
−
41451
12493
00140
00030
00041
vi)
001
100
010
0 0 0 D11+ 5 0 0 0 0 0 0 8 0 0 0 -8 0 0 0
0 1 0 0
0 0 0 0
(D11- 3)3 0 0 D11+ 5 0 0 0 0 0 0 8 0 0 0 -8 0 0 0
0 0 0 0 0 0 0 0 0
T11 T21
0 T22
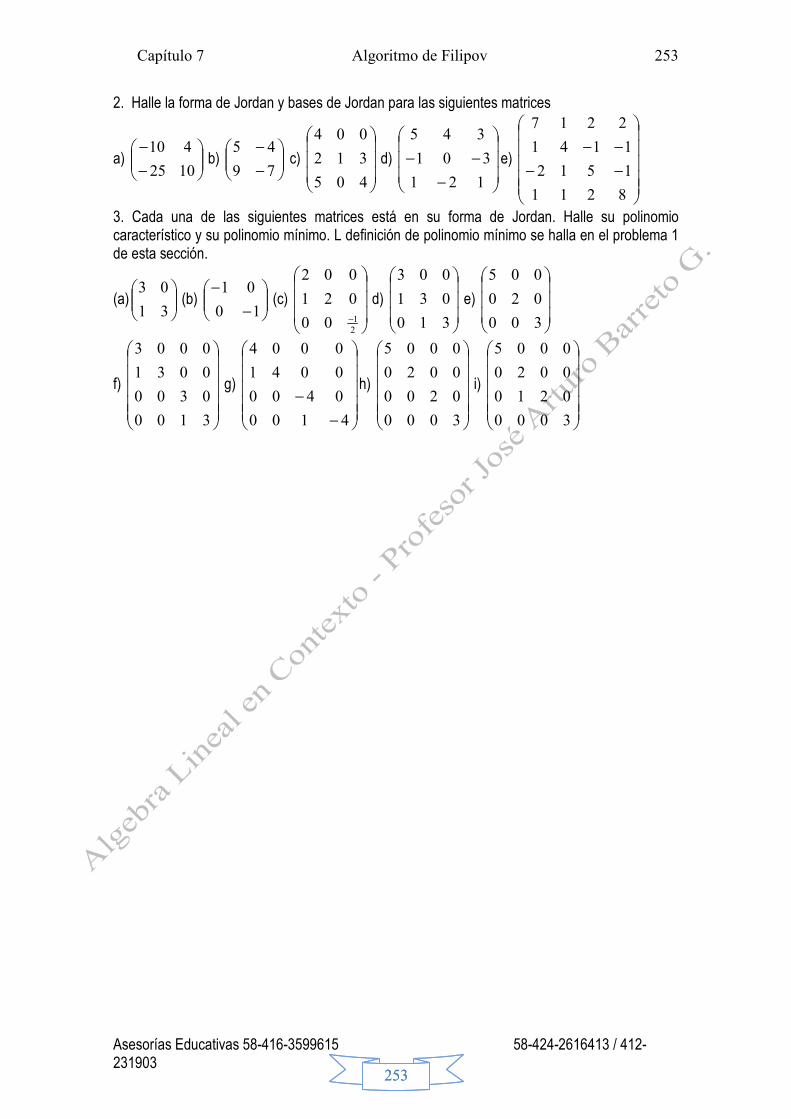
Capítulo 7 Algoritmo de Filipov
Asesorías Educativas 58-416-3599615 58-424-2616413 / 412-231903
253
253 253
2. Halle la forma de Jordan y bases de Jordan para las siguientes matrices
a)
−
−
1025
410 b)
−
−
79
45 c)
405
312
004
d)
−
−−
121
301
345
e)
−−
−−
8211
1512
1141
2217
3. Cada una de las siguientes matrices está en su forma de Jordan. Halle su polinomio característico y su polinomio mínimo. L definición de polinomio mínimo se halla en el problema 1 de esta sección.
(a)
31
03 (b)
−
−
10
01 (c)
−2
100
021
002
d)
310
031
003
e)
300
020
005
f)
3100
0300
0031
0003
g)
−
−
4100
0400
0041
0004
h)
3000
0200
0020
0005
i)
3000
0210
0020
0005