canopen manual del usuario - automatización …³n relativa al producto comentarios del usuario...
TRANSCRIPT
35013947 04/2009
www.infoPLC.net
350139
47.0
3
www.schneider-electric.com
Modicon M340 con Unity ProCANopenManual del usuario
04/2009
www.infoPLC.net
Schneider Electric no asume ninguna responsabilidad ante los posibles errores que aparezcan en este documento. Si tiene alguna sugerencia para llevar a cabo mejoras o modificaciones o si ha encontrado errores en esta publicación, le rogamos que nos lo notifique.
Queda prohibido reproducir cualquier parte de este documento bajo ninguna forma o medio posible, ya sea electrónico, mecánico o fotocopia, sin autorización previa de Schneider Electric.
Deberán tenerse en cuenta todas las normas de seguridad nacionales, regionales y locales pertinentes a la hora de instalar y utilizar este producto. Por razones de seguridad y para garantizar que se siguen los consejos de la documentación del sistema, las reparaciones sólo podrá realizarlas el fabricante.
Cuando se utilicen dispositivos para aplicaciones con requisitos técnicos de seguridad, siga las instrucciones pertinentes.
Si no se utiliza el software de Schneider Electric o un software compatible con nuestros productos de hardware, pueden sufrirse daños o lesiones o provocar un funcionamiento inadecuado del dispositivo.
Si no se tiene en cuenta esta información se pueden causar daños personales o en el equipo.
© 2009 Schneider Electric. Reservados todos los derechos.
2 35013947 04/2009
www.infoPLC.net
Tabla de materias
Información de seguridad . . . . . . . . . . . . . . . . . . . . . . . . 7Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Parte I Instalación del hardware CANopen . . . . . . . . . . . . . 11Capítulo 1 Instalación de hardware de los procesadores BMX P34 13
Descripción de los procesadores: BMX P34 2010/20102/2030/20302. . . 14 Equipo Modicon M340H (Endurecido) . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Instalación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Diagnóstico visual de los procesadores CANopen . . . . . . . . . . . . . . . . . . 18
Capítulo 2 Presentación de los dispositivos CANopen . . . . . . . . . 21Dispositivos CANopen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Dispositivos de comando de movimiento CANopen . . . . . . . . . . . . . . . . . 24Dispositivos de entrada/salida CANopen . . . . . . . . . . . . . . . . . . . . . . . . . 29Otros dispositivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Parte II Instalación del software de comunicación CANopen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Capítulo 3 Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Principio de instalación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40Método de instalación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Rendimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Dispositivo PDO y asignación de memoria . . . . . . . . . . . . . . . . . . . . . . . . 45
Capítulo 4 Configuración de la comunicación ene el bus CANopen 494.1 Aspectos generales. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Generalidades. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.2 Configuración del bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Acceder a la pantalla de configuración del bus CANopen . . . . . . . . . . . . 52Editor de bus CANopen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Adición de un dispositivo en el bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Eliminar, desplazar o duplicar un dispositivo del bus . . . . . . . . . . . . . . . . 58Vista del bus CANopen en el explorador de proyectos. . . . . . . . . . . . . . . 60
35013947 04/2009 3
www.infoPLC.net
4.3 Configuración del dispositivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61Funciones de los esclavos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62 Configuración mediante Unity con las CPU 2010/2030. . . . . . . . . . . . . 66 Configuración mediante Unity con las CPU 20102/20302. . . . . . . . . . . 72 Configuración con una herramienta externa: Software de configuración 82Configuración manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.4 Configuración del maestro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87Acceso a la pantalla de configuración del maestro CANopen. . . . . . . . . 88Pantalla de configuración del maestro CANopen con las CPU 2010/2030 90Descripción de la pantalla de configuración del maestro para las CPU 2010/2030 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92Pantalla de configuración del maestro CANopen con las CPU 20102/20302 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96Descripción de la pantalla de configuración del maestro para las CPU 20102/20302 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Capítulo 5 Implementación del software Catalog Manager . . . . . . . 1035.1 Descripción general de Catalog Manager . . . . . . . . . . . . . . . . . . . . . . . . 104
Descripción de Catalog Manager. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105Contenido de Catalog Manager. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.2 Uso de Catalog Manager. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112Inicio de Catalog Manager. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113Adición de un dispositivo a Catalog Manager . . . . . . . . . . . . . . . . . . . . . 114Adición de una función en un dispositivo. . . . . . . . . . . . . . . . . . . . . . . . . 118Parámetros de configuración básica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120Parámetros de configuración de Expert Mode. . . . . . . . . . . . . . . . . . . . . 125Función MFB para Expert Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137Restricciones de compatibilidad de CANopen. . . . . . . . . . . . . . . . . . . . . 143Copia o eliminación de una función. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144Importación/exportación o eliminación de uno o varios dispositivos de usuario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145Cierre de Catalog Manager . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148Ejemplo de creación de una isla STB dedicada y optimizada . . . . . . . . 149
5.3 Solución de problemas de Catalog Manager. . . . . . . . . . . . . . . . . . . . . . 150Solución de problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151Descripción de los códigos de cancelación de SDO . . . . . . . . . . . . . . . . 155Código de anomalía de importación de EDS. . . . . . . . . . . . . . . . . . . . . . 157
Capítulo 6 Programación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163 Intercambios mediante PDO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164Intercambios mediante SDO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169 Ejemplo de funciones de comunicación . . . . . . . . . . . . . . . . . . . . . . . . . 172Ejemplo de petición Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
4 35013947 04/2009
www.infoPLC.net
Capítulo 7 Depuración de la comunicación en el bus CANopen . . 179Acceder a las pantallas de depuración de dispositivos remotos. . . . . . . . 180Pantalla de depuración del maestro CANopen para las CPU 2010/2030. 181Pantalla de depuración del maestro CANopen para las CPU 20102/20302 183Pantallas de depuración de esclavo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
Capítulo 8 Diagnóstico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189Realización de un diagnóstico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190Diagnóstico del maestro para las CPU 2010/2030 . . . . . . . . . . . . . . . . . . 191Diagnóstico del maestro para las CPU 20102/20302 . . . . . . . . . . . . . . . . 193Diagnósticos de esclavos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
Capítulo 9 Objetos de lenguaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1999.1 Información general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
Presentación de los objetos de lenguaje para la comunicación CANopen 201Objetos de lenguaje de intercambio implícito asociados a la función específica de la aplicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202Detalles de los objetos de intercambio implícito del IODDT de tipo T_COM_STS_GEN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203Objetos de lenguaje de intercambio explícito asociados a la función específica de la aplicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204Detalles de los objetos de intercambio explícito del IODDT de tipo T_COM_STS_GEN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206Gestión de intercambios e informes con objetos explícitos . . . . . . . . . . . 208
9.2 Objetos de lenguaje del IODDT específico de CANopen . . . . . . . . . . . . . 210Detalles del IODDT T_COM_CO_BMX. . . . . . . . . . . . . . . . . . . . . . . . . . . 211Detalles del IODDT T_COM_CO_BMX_EXPERT . . . . . . . . . . . . . . . . . . 224Objetos de lenguaje asociados con la configuración . . . . . . . . . . . . . . . . 238
9.3 Objetos de emergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240Objetos de emergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
Parte III Inicio rápido: ejemplo de implementación CANopen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245
Capítulo 10 Descripción de la aplicación . . . . . . . . . . . . . . . . . . . . . . 247Descripción general de la aplicación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
Capítulo 11 Instalación de la aplicación mediante Unity Pro . . . . . . 24911.1 Presentación de la solución utilizada . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
Selecciones tecnológicas utilizadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251Los distintos pasos del proceso utilizando Unity Pro . . . . . . . . . . . . . . . . 252
11.2 Desarrollo de la aplicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253Creación del proyecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254Configuración del bus CANopen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255Configuración del maestro CANopen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260Configuración de los equipos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262Declaración de variables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267Creación del programa en SFC para la gestión de la secuencia de desplazamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
35013947 04/2009 5
www.infoPLC.net
Creación de un programa en LD para la ejecución de la aplicación . . . . 275Creación de un programa en LD para la animación de la pantalla de operador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277Creación de un programa en ST para la configuración de Lexium . . . . . 278Creación de una tabla de animación . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282Creación de la pantalla de operador . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284
Capítulo 12 Inicio de la aplicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287Ejecución de la aplicación en modalidad estándar . . . . . . . . . . . . . . . . . 287
Apéndices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293Apéndice A Entrada del diccionario de objetos local del maestro
CANopen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295Inserciones del diccionario de objetos según el perfil DS301 . . . . . . . . . 296Entradas del diccionario de objetos según el perfil DS302 . . . . . . . . . . . 301Inserciones de diccionario de objetos específicos del fabricante Midrange 303
Apéndice B Relación entre PDO y variables STB . . . . . . . . . . . . . . . . 311Configuración de isla STB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
Apéndice C Acciones y transiciones . . . . . . . . . . . . . . . . . . . . . . . . . . 315Transiciones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316Acciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 317
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 319Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325
6 35013947 04/2009
§
www.infoPLC.net
Información de seguridad
Información importante
AVISO
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con el dispositivo antes de instalarlo, utilizarlo o realizar su mantenimiento. Los mensajes especiales que se ofrecen a continuación pueden aparecer a lo largo de la documentación o en el equipo para advertir de peligros potenciales o para ofrecer información que aclara o simplifica los distintos procedimientos.
35013947 04/2009 7
www.infoPLC.net
TENGA EN CUENTA
La instalación, manejo, puesta en servicio y mantenimiento de equipos eléctricos deberán ser realizados sólo por personal cualificado. Schneider Electric no se hace responsable de ninguna de las consecuencias del uso de este material.
8 35013947 04/2009
www.infoPLC.net
Acerca de este libro
Presentación
Objeto
En este manual se describe la implementación de una red CANopen en PLC del rango Modicon M340.
Campo de aplicación
Esta documentación es válida para el software Unity Pro versión 4.1.
Información relativa al producto
Comentarios del usuario
Envíe sus comentarios a la dirección electrónica [email protected].
ADVERTENCIAFUNCIONAMIENTO INESPERADO DEL EQUIPO
La aplicación de este producto requiere experiencia en el diseño y la programación de sistemas de control. Sólo las personas con dicha experiencia están autorizadas a programar, instalar, modificar y aplicar este producto.
Siga todos los estándares y códigos de seguridad nacionales y locales.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
35013947 04/2009 9

10 35013947 04/2009
www.infoPLC.net
35013947 04/2009
I
Bus CANopen
35013947 04/2009
www.infoPLC.net
Instalación del hardware CANopen
Objeto
En esta parte se describen las distintas posibilidades de configuración del hardware de una arquitectura de bus CANopen.
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
1 Instalación de hardware de los procesadores BMX P34 13
2 Presentación de los dispositivos CANopen 21
11

Bus CANopen
12 35013947 04/2009
www.infoPLC.net
35013947 04/2009
1
CANopen en procesadores BMX P34
35013947 04/2009
www.infoPLC.net
Instalación de hardware de los procesadores BMX P34
Objetivo de este capítulo
En este capítulo se presentan los procesadores BMX P34 equipados con un puerto CANopen, así como su instalación.
Para ver las diferencias entre la CPU P34 201/2030 y 20102/20302, consulte el capítulo Restricciones de compatibilidad de CANopen (véase página 143).
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción de los procesadores: BMX P34 2010/20102/2030/20302 14
Equipo Modicon M340H (Endurecido) 16
Instalación 17
Diagnóstico visual de los procesadores CANopen 18
13
CANopen en procesadores BMX P34www.infoPLC.net
Descripción de los procesadores: BMX P34 2010/20102/2030/20302
Presentación
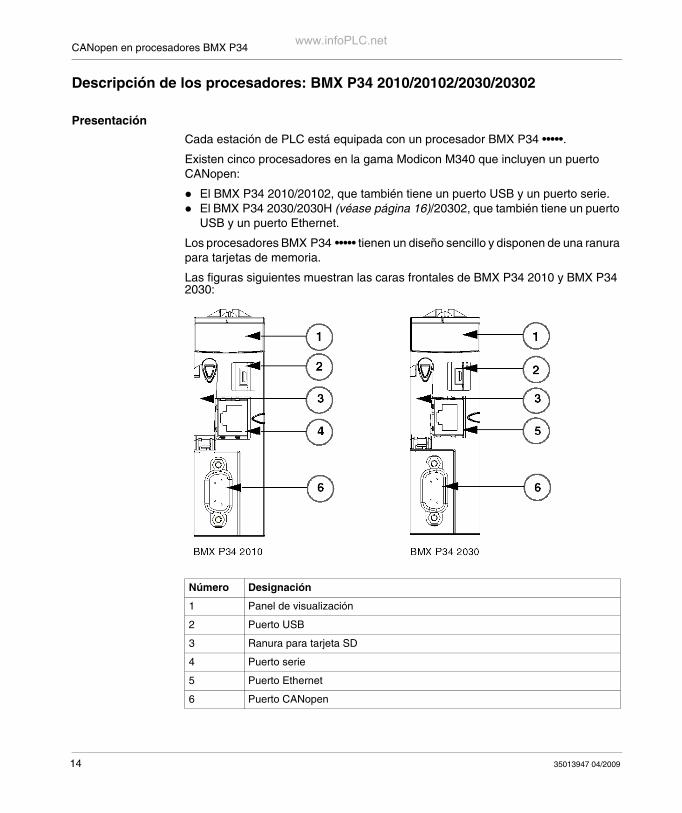
Cada estación de PLC está equipada con un procesador BMX P34 •••••.
Existen cinco procesadores en la gama Modicon M340 que incluyen un puerto CANopen:
El BMX P34 2010/20102, que también tiene un puerto USB y un puerto serie. El BMX P34 2030/2030H (véase página 16)/20302, que también tiene un puerto
USB y un puerto Ethernet.
Los procesadores BMX P34 ••••• tienen un diseño sencillo y disponen de una ranura para tarjetas de memoria.
Las figuras siguientes muestran las caras frontales de BMX P34 2010 y BMX P34 2030:
Número Designación
1 Panel de visualización
2 Puerto USB
3 Ranura para tarjeta SD
4 Puerto serie
5 Puerto Ethernet
6 Puerto CANopen
14 35013947 04/2009

CANopen en procesadores BMX P34www.infoPLC.net
Estos procesadores son maestros de bus y no pueden funcionar como esclavos. Se conectan por medio de conectores SUB-D 9 y permiten la conexión de dispositivos esclavo que admiten el protocolo CANopen.
NOTA: Existe sólo un maestro BMX P34 ••••• por bus.
35013947 04/2009 15
CANopen en procesadores BMX P34www.infoPLC.net
Equipo Modicon M340H (Endurecido)
M340H
El equipo Modicon M340H (Endurecido) es una versión reforzada del equipo M340. Puede utilizarse con un mayor rango de temperatura (-25...70 ºC) (-13...158 ºF) y en entornos químicos severos.
El equipo M340H, cuando se encuentra dentro del rango de temperatura estándar (0…60 ºC)(32...140 ºF), tiene las mismas características que el equipo M340 estándar.
En los extremos de temperatura (-25... 0 ºC y 60... 70 ºC) (-13...32 ºF) y (140...158 ºF), las versiones endurecidas pueden tener valores nominales de potencia reducidos que repercuten en los cálculos de potencia para las aplicaciones Unity Pro.
Si este equipo funciona fuera del rango de temperatura de -25...70 ºC (-13...158 ºF), el equipo puede funcionar anormalmente.
El equipo endurecido posee un revestimiento homologado que se aplica a las tarjetas electrónicas. Esta protección, asociada a una instalación y un mantenimiento adecuados, permite que sea más sólido cuando funciona en entornos químicos severos.
ATENCIÓNFUNCIONAMIENTO INESPERADO DEL EQUIPO
No utilice el equipo M340H fuera de su rango de temperatura.
Si no se siguen estas instrucciones pueden producirse lesiones personales o daños en el equipo.
16 35013947 04/2009
CANopen en procesadores BMX P34www.infoPLC.net
Instalación
Presentación
Los procesadores BMX P34 2010/20102 2030/20302 equipados con un puerto CANopen se montan en bastidores BMX XBP •••• alimentados por módulos BMX CPS ••••.
NOTA: Después de una extracción/inserción del procesador mientras se ejecuta, el bus ya no está operativo. Para reiniciar el bus, se debe reinicializar la fuente de alimentación.
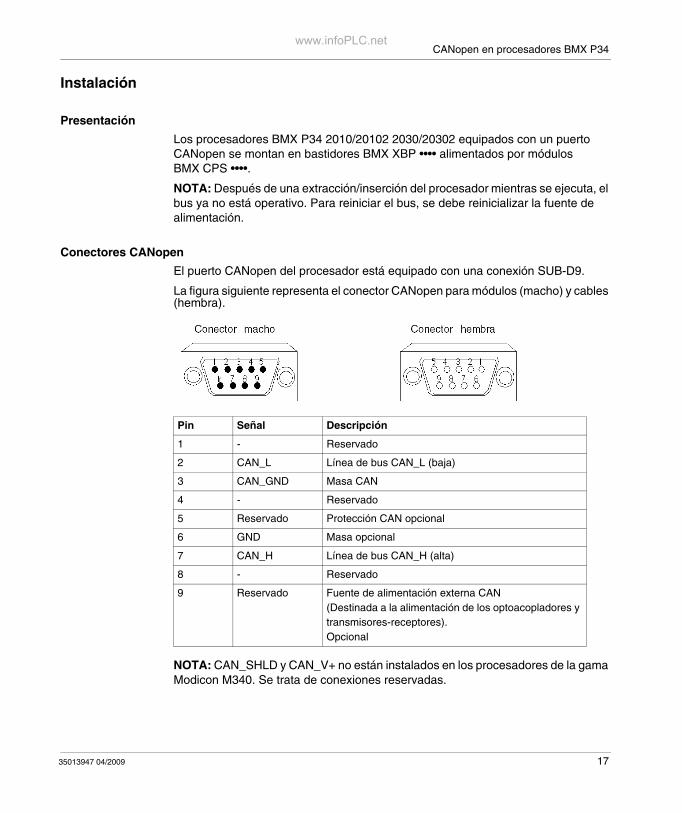
Conectores CANopen
El puerto CANopen del procesador está equipado con una conexión SUB-D9.
La figura siguiente representa el conector CANopen para módulos (macho) y cables (hembra).
NOTA: CAN_SHLD y CAN_V+ no están instalados en los procesadores de la gama Modicon M340. Se trata de conexiones reservadas.
Pin Señal Descripción
1 - Reservado
2 CAN_L Línea de bus CAN_L (baja)
3 CAN_GND Masa CAN
4 - Reservado
5 Reservado Protección CAN opcional
6 GND Masa opcional
7 CAN_H Línea de bus CAN_H (alta)
8 - Reservado
9 Reservado Fuente de alimentación externa CAN (Destinada a la alimentación de los optoacopladores y transmisores-receptores). Opcional
35013947 04/2009 17
CANopen en procesadores BMX P34www.infoPLC.net
Diagnóstico visual de los procesadores CANopen
Presentación
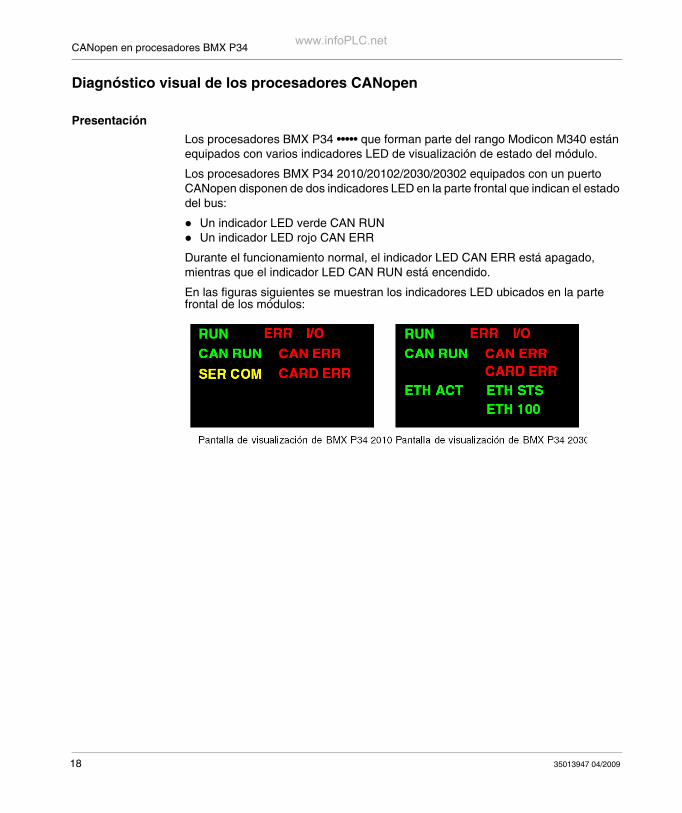
Los procesadores BMX P34 ••••• que forman parte del rango Modicon M340 están equipados con varios indicadores LED de visualización de estado del módulo.
Los procesadores BMX P34 2010/20102/2030/20302 equipados con un puerto CANopen disponen de dos indicadores LED en la parte frontal que indican el estado del bus:
Un indicador LED verde CAN RUN Un indicador LED rojo CAN ERR
Durante el funcionamiento normal, el indicador LED CAN ERR está apagado, mientras que el indicador LED CAN RUN está encendido.
En las figuras siguientes se muestran los indicadores LED ubicados en la parte frontal de los módulos:
18 35013947 04/2009
CANopen en procesadores BMX P34www.infoPLC.net
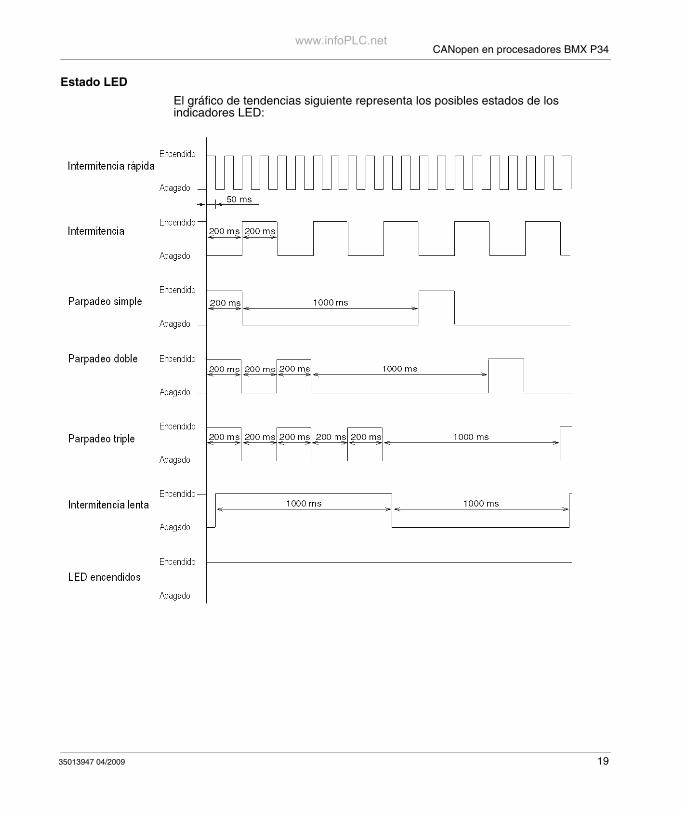
Estado LED
El gráfico de tendencias siguiente representa los posibles estados de los indicadores LED:
35013947 04/2009 19
CANopen en procesadores BMX P34www.infoPLC.net
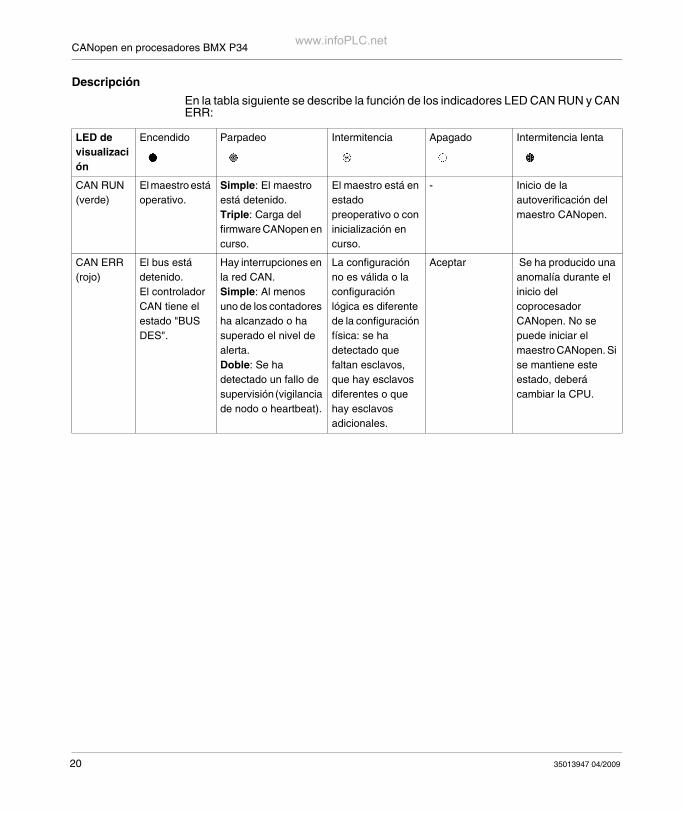
Descripción
En la tabla siguiente se describe la función de los indicadores LED CAN RUN y CAN ERR:
LED de visualización
Encendido Parpadeo Intermitencia Apagado Intermitencia lenta
CAN RUN(verde)
El maestro está operativo.
Simple: El maestro está detenido.Triple: Carga del firmware CANopen en curso.
El maestro está en estado preoperativo o con inicialización en curso.
- Inicio de la autoverificación del maestro CANopen.
CAN ERR(rojo)
El bus está detenido.El controlador CAN tiene el estado "BUS DES".
Hay interrupciones en la red CAN.Simple: Al menos uno de los contadores ha alcanzado o ha superado el nivel de alerta.Doble: Se ha detectado un fallo de supervisión (vigilancia de nodo o heartbeat).
La configuración no es válida o la configuración lógica es diferente de la configuración física: se ha detectado que faltan esclavos, que hay esclavos diferentes o que hay esclavos adicionales.
Aceptar Se ha producido una anomalía durante el inicio del coprocesador CANopen. No se puede iniciar el maestro CANopen. Si se mantiene este estado, deberá cambiar la CPU.
20 35013947 04/2009
35013947 04/2009
2
Esclavos CANopen
35013947 04/2009
www.infoPLC.net
Presentación de los dispositivos CANopen
Objeto
En esta sección se presentan los distintos dispositivos CANopen.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Dispositivos CANopen 22
Dispositivos de comando de movimiento CANopen 24
Dispositivos de entrada/salida CANopen 29
Otros dispositivos 32
21
Esclavos CANopenwww.infoPLC.net
Dispositivos CANopen
Presentación
Los dispositivos que pueden conectarse a un bus CANopen y configurarse en Unity Pro se agrupan según sus funciones:
Dispositivos de comando de movimiento Dispositivos de entrada/salida Otros dispositivos
NOTA: Sólo es posible utilizar los dispositivos de Hardware Catalog con Unity Pro. Los dispositivos nuevos deben importarse a Hardware Catalog desde Hardware Catalog Manager. Esta importación está disponible a partir de la versión 4.0 de Unity.
NOTA: Está disponible una vista general de Hardware Catalog Manager en modo de sólo lectura en Unity Pro mediante Hardware Catalog.
Dispositivos de comando de movimiento
Los dispositivos de comando de movimiento permiten controlar los motores.
Estos dispositivos son los siguientes:
Altivar Lexium IcLA Osicoder Telsys T SD328A Stepper Drive
Dispositivos de entrada/salida
Los módulos de entradas/salidas funcionan como módulos remotos. Estos dispositivos son los siguientes:
Dispositivos Tego Power Advantys FTB Advantys OTB Advantys FTM Dispositivos Preventa
22 35013947 04/2009
Esclavos CANopenwww.infoPLC.net
Otros dispositivos
Estos dispositivos son:
Islas Advantys STB Tesys U Terminal de válvulas Festo Parker Moduflex
Las islas STB también permiten supervisar las entradas/salidas.
35013947 04/2009 23
Esclavos CANopenwww.infoPLC.net
Dispositivos de comando de movimiento CANopen
Presentación
Los dispositivos de comando de movimiento permiten controlar los motores.
Estos dispositivos son los siguientes:
Altivar, Lexium, IcLA, Osicoder, Tesys T, SD328A Stepper Drive.
Dispositivos Altivar
Un dispositivo Altivar permite controlar la velocidad de un motor a través de un control de vector de flujo.
En la figura siguiente se proporciona un ejemplo de un dispositivo Altivar:
NOTA: La versión mínima recomendada del firmware es 1.3 para ATV31 T.
NOTA: La versión mínima recomendada del firmware es 1.1 para ATV31, ATV61 y ATV71.
NOTA: No se admite la versión 1.7 de ATV31. Sin embargo, puede utilizarse configurándolo con el perfil ATV31 1.2. En este caso, sólo estarán disponibles las funciones de la versión 1.2 de ATV31.
NOTA: ATV71: Si lo tiene que desconectar del bus CANopen, apague el dispositivo; de lo contrario, cuando lo vuelva a conectar al bus, provocará un error grave del bus. Este problema queda resuelto en la versión 1.2 del firmware ATV71 y en versiones posteriores.
24 35013947 04/2009

Esclavos CANopenwww.infoPLC.net
NOTA: ATV61: Si lo tiene que desconectar del bus CANopen, apague el dispositivo; de lo contrario, cuando lo vuelva a conectar al bus, provocará un error grave del bus. Este problema queda resuelto en la versión 1.4 del firmware ATV61 y en versiones posteriores.
Dispositivos Lexium
El rango de servounidades Lexium 05 que son compatibles con los servomotores BSH constituye una combinación dinámica y compacta de máquinas con un amplio rango de tensión de fuente de alimentación (0,4–6 kW).
El diseño compacto de la servounidad Lexium 05 y los componentes integrados (filtro de línea, resistencia de frenado y función de seguridad) reduce al mínimo el espacio necesario en el armario del conmutador. Integra la función de seguridad Power Removal, que impide que se inicie el motor de forma accidental.
Otra ventaja de la servounidad Lexium 05 es la versatilidad de las opciones de las aplicaciones:
como par o controlador de velocidad mediante las entradas analógicas, como engranaje electrónico mediante la interfase RS422, como controlador de velocidad o posicionamiento mediante la interfase de bus
de campo.
La servounidad está disponible en cuatro tipos de tensión diferentes:
115 V CA monofásico, 230 V CA monofásico y trifásico, 400/480 V CA trifásico.
En la figura siguiente se proporciona un ejemplo de un dispositivo Lexium:
NOTA: La versión mínima recomendada del firmware para el dispositivo Lexium 05 MFB es 1.003.
NOTA: La versión mínima recomendada del firmware para el dispositivo Lexium 05 es 1.120.
35013947 04/2009 25

Esclavos CANopenwww.infoPLC.net
NOTA: La versión mínima recomendada del firmware para Lexium 15 LP es 1.45.
NOTA: La versión mínima recomendada del firmware para Lexium 15 MH es 6.64
Dispositivos IcLA
Los dispositivos IcLA son unidades compactas inteligentes. Disponen de todos los componentes necesarios para efectuar tareas de movimiento: controlador de posicionamiento, servounidades y dispositivos electrónicos, EC o motor paso a paso.
En la figura siguiente se proporciona un ejemplo de un dispositivo IcLA:
Dispositivos Osicoder
El dispositivo Osicoder es un sensor de posición angular.
ADVERTENCIAFUNCIONAMIENTO INESPERADO DEL EQUIPO
La versión mínima del firmware de los dispositivos ICLA IFA que se debe utilizar es 1.105.
La versión mínima del firmware de los dispositivos ICLA IFE que se debe utilizar es 1.104.
La versión mínima del firmware de los dispositivos ICLA IFS que se debe utilizar es 1.107.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
26 35013947 04/2009
Esclavos CANopenwww.infoPLC.net
El eje del codificador, que está acoplado de forma mecánica a un perno conductor de una máquina, gira un disco que se compone de una sucesión de sectores transparentes y opacos. La luz de los indicadores LED pasa a través de los sectores transparentes del disco a medida que aparecen y los diodos fotosensibles la detectan. Los diodos fotosensibles, a su vez, generan una señal eléctrica que se amplifica y se convierte en una señal digital antes de transmitirse a un sistema de procesamiento o a una unidad electrónica de velocidad variable. Por lo tanto, la salida electrónica del codificador representa, de forma digital, la posición angular del eje de entrada.
En la figura siguiente se proporciona un ejemplo de un dispositivo Osicoder:
NOTA: La versión mínima del firmware para dispositivos Osicoder es 1.0.
Sistema de gestión de los motores Tesys T
Tesys T es un sistema de gestión de motores que ofrece funciones de detección de sobrecarga, medición y supervisión para los motores monofásicos y trifásicos, de velocidad constante y de CA hasta 810 A.
Su utilización en los paneles de control de motores hace posible lo siguiente:
Aumenta la disponibilidad operativa de las instalaciones. Mejora de la flexibilidad del diseño de proyectos a través de la implementación. Aumento de la productividad porque hace que esté disponible toda la
información necesaria para ejecutar el sistema.
En la ilustración siguiente se proporciona un ejemplo de un dispositivo Tesys T:
35013947 04/2009 27
Esclavos CANopenwww.infoPLC.net
SD328A Stepper Drive
SD328A es una unidad gradual de aplicación universal.
Ofrece un sistema de unidades muy potente y compacto, que se combina con motores graduales seleccionados de Schneider Electric Motion.
El dispositivo tiene una salida para una conexión directa con un freno de retención opcional.
En la figura siguiente se proporciona un ejemplo de un dispositivo SD328A Stepper Drive:
28 35013947 04/2009
Esclavos CANopenwww.infoPLC.net
Dispositivos de entrada/salida CANopen
Presentación
Los módulos de entrada/salida funcionan como módulos remotos.
Estos dispositivos son los siguientes:
Dispositivos Tego Power, Advantys FTB, Advantys OTB, Advantys FTM, Dispositivos Preventa.
Dispositivos Tego Power
Tego Power es un sistema modular que normaliza y simplifica la implementación de los reguladores de arranque por medio de los circuitos correspondientes de alimentación y control previamente cableados. Además, este sistema permite que el regulador de arranque pueda personalizarse en un futuro, atenúa el tiempo de mantenimiento y optimiza el espacio de panel, reduciendo el número de terminales e interfases intermedias, así como el equipo de propagación por conductos.
En la figura siguiente se proporciona un ejemplo de un dispositivo Tego Power:
NOTA: La versión mínima para TegoPower APP_1CCO0 y TegoPower APP_1CCO2 es 1.0.
Dispositivos Advantys FTB
El distribuidor Advantys FTB está compuesto por varias entradas y salidas que permiten la conexión de sensores y activadores.
NOTA: La versión mínima del firmware para FTB es 1.07.
35013947 04/2009 29

Esclavos CANopenwww.infoPLC.net
NOTA: Para FTB 1CN16CM0, el funcionamiento está garantizado a partir de la versión mínima del firmware 1.05.
En la figura siguiente se proporciona un ejemplo de un dispositivo Advantys FTB:
Dispositivos Advantys OTB
Un dispositivo Advantys OTB permite formar islas de entradas/salidas binarias (132 canales como máximo dentro de los límites) o analógicas (48 canales como máximo) IP20, y conectarlas cerca de los captadores activos.
En la figura siguiente se proporciona un ejemplo de un dispositivo Advantys OTB:
NOTA: La versión mínima del firmware para OTB es 2.0.
ADVERTENCIAFUNCIONAMIENTO INESPERADO DEL EQUIPO
La versión mínima del firmware de los dispositivos Advantys OTB que se debe utilizar es 2.0.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
30 35013947 04/2009
Esclavos CANopenwww.infoPLC.net
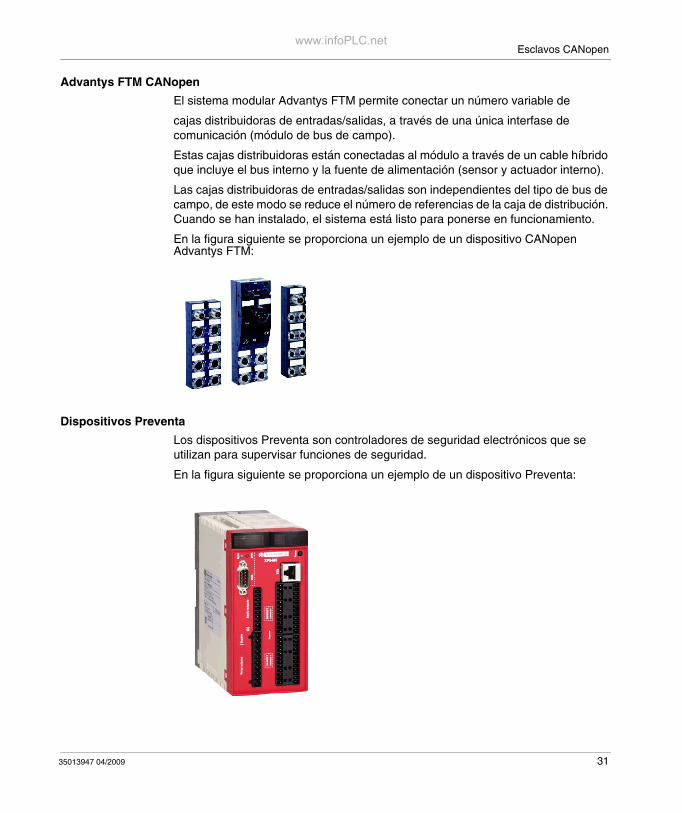
Advantys FTM CANopen
El sistema modular Advantys FTM permite conectar un número variable de
cajas distribuidoras de entradas/salidas, a través de una única interfase de comunicación (módulo de bus de campo).
Estas cajas distribuidoras están conectadas al módulo a través de un cable híbrido que incluye el bus interno y la fuente de alimentación (sensor y actuador interno).
Las cajas distribuidoras de entradas/salidas son independientes del tipo de bus de campo, de este modo se reduce el número de referencias de la caja de distribución. Cuando se han instalado, el sistema está listo para ponerse en funcionamiento.
En la figura siguiente se proporciona un ejemplo de un dispositivo CANopen Advantys FTM:
Dispositivos Preventa
Los dispositivos Preventa son controladores de seguridad electrónicos que se utilizan para supervisar funciones de seguridad.
En la figura siguiente se proporciona un ejemplo de un dispositivo Preventa:
35013947 04/2009 31
Esclavos CANopenwww.infoPLC.net
Otros dispositivos
Presentación
Estos dispositivos son los siguientes:
Isla STB, Tesys U, Terminal de válvulas Festo, Parker Moduflex.
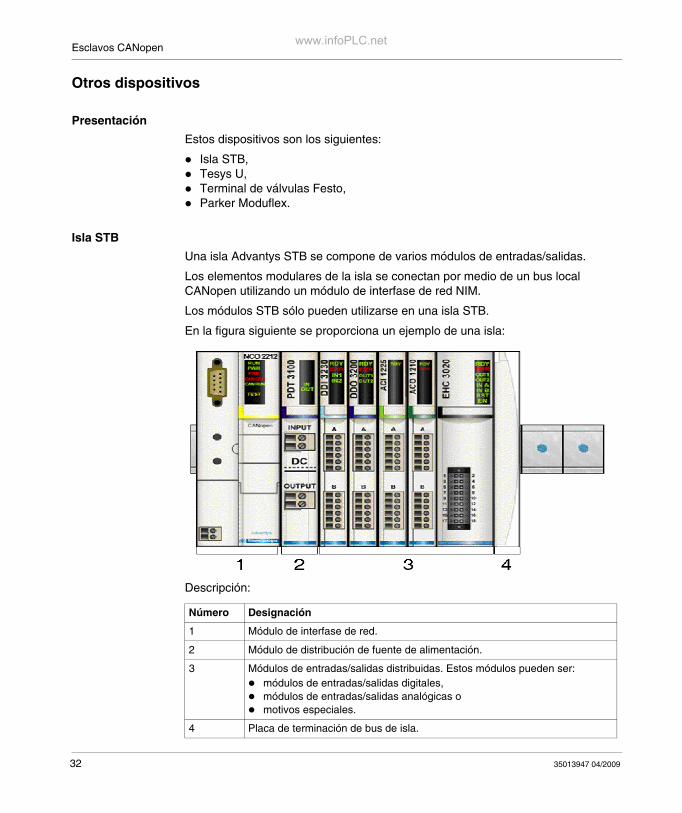
Isla STB
Una isla Advantys STB se compone de varios módulos de entradas/salidas.
Los elementos modulares de la isla se conectan por medio de un bus local CANopen utilizando un módulo de interfase de red NIM.
Los módulos STB sólo pueden utilizarse en una isla STB.
En la figura siguiente se proporciona un ejemplo de una isla:
Descripción:
Número Designación
1 Módulo de interfase de red.
2 Módulo de distribución de fuente de alimentación.
3 Módulos de entradas/salidas distribuidas. Estos módulos pueden ser: módulos de entradas/salidas digitales, módulos de entradas/salidas analógicas o motivos especiales.
4 Placa de terminación de bus de isla.
32 35013947 04/2009
Esclavos CANopenwww.infoPLC.net
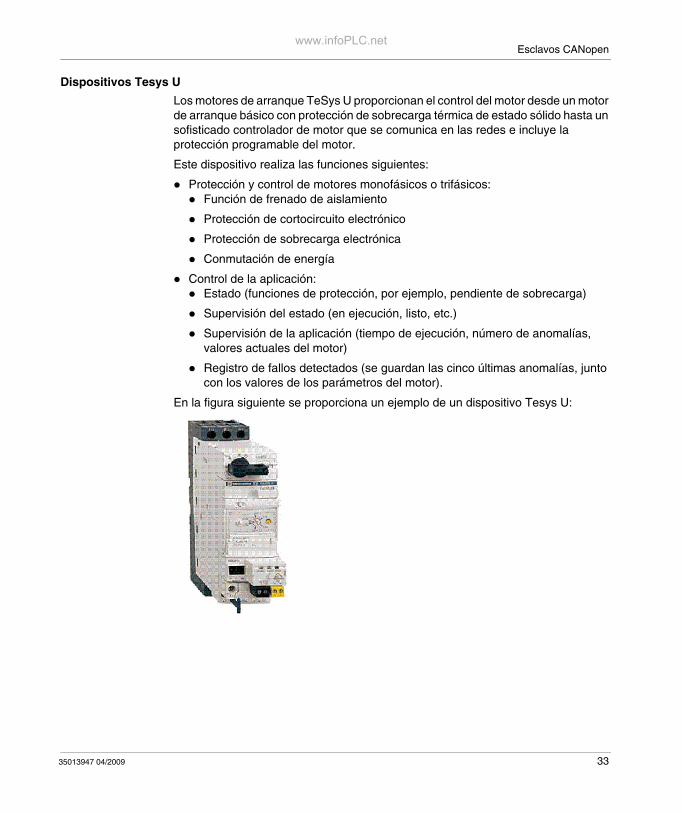
Dispositivos Tesys U
Los motores de arranque TeSys U proporcionan el control del motor desde un motor de arranque básico con protección de sobrecarga térmica de estado sólido hasta un sofisticado controlador de motor que se comunica en las redes e incluye la protección programable del motor.
Este dispositivo realiza las funciones siguientes:
Protección y control de motores monofásicos o trifásicos: Función de frenado de aislamiento
Protección de cortocircuito electrónico
Protección de sobrecarga electrónica
Conmutación de energía
Control de la aplicación: Estado (funciones de protección, por ejemplo, pendiente de sobrecarga)
Supervisión del estado (en ejecución, listo, etc.)
Supervisión de la aplicación (tiempo de ejecución, número de anomalías, valores actuales del motor)
Registro de fallos detectados (se guardan las cinco últimas anomalías, junto con los valores de los parámetros del motor).
En la figura siguiente se proporciona un ejemplo de un dispositivo Tesys U:
35013947 04/2009 33
Esclavos CANopenwww.infoPLC.net
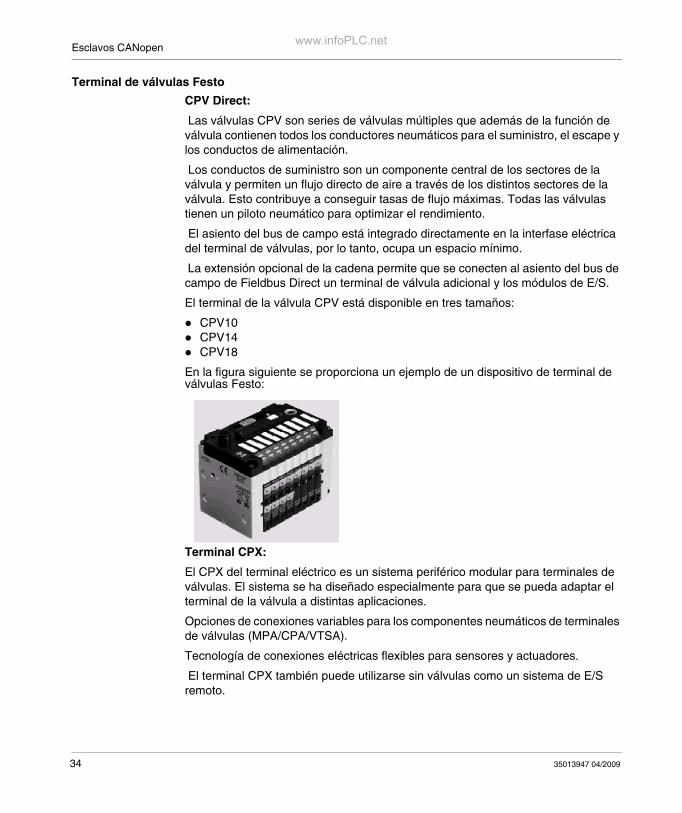
Terminal de válvulas Festo
CPV Direct:
Las válvulas CPV son series de válvulas múltiples que además de la función de válvula contienen todos los conductores neumáticos para el suministro, el escape y los conductos de alimentación.
Los conductos de suministro son un componente central de los sectores de la válvula y permiten un flujo directo de aire a través de los distintos sectores de la válvula. Esto contribuye a conseguir tasas de flujo máximas. Todas las válvulas tienen un piloto neumático para optimizar el rendimiento.
El asiento del bus de campo está integrado directamente en la interfase eléctrica del terminal de válvulas, por lo tanto, ocupa un espacio mínimo.
La extensión opcional de la cadena permite que se conecten al asiento del bus de campo de Fieldbus Direct un terminal de válvula adicional y los módulos de E/S.
El terminal de la válvula CPV está disponible en tres tamaños:
CPV10 CPV14 CPV18
En la figura siguiente se proporciona un ejemplo de un dispositivo de terminal de válvulas Festo:
Terminal CPX:
El CPX del terminal eléctrico es un sistema periférico modular para terminales de válvulas. El sistema se ha diseñado especialmente para que se pueda adaptar el terminal de la válvula a distintas aplicaciones.
Opciones de conexiones variables para los componentes neumáticos de terminales de válvulas (MPA/CPA/VTSA).
Tecnología de conexiones eléctricas flexibles para sensores y actuadores.
El terminal CPX también puede utilizarse sin válvulas como un sistema de E/S remoto.
34 35013947 04/2009
Esclavos CANopenwww.infoPLC.net
En la figura siguiente se proporciona un ejemplo de un dispositivo de terminal CPX:
Parker Moduflex
El sistema de válvulas Parker Moduflex proporciona automatización neumática flexible.
Según la aplicación, puede montar islas cortas o largas (hasta 16 salidas). La protección frente al agua y al polvo IP 65-67 permite que la válvula se instale cerca de los cilindros, para reducir el tiempo de respuesta y el consumo de aire. El módulo CANopen del sistema de válvulas Parker Moduflex (P2M2HBVC11600) puede utilizarse como dispositivo CANopen mejorado en una configuración Modicon M340.
La versión de firmware del P2M2HBVC11600 debe ser 1.4 o posterior.
Para obtener instrucciones detalladas del cableado P2M2HBVC11600, los modelos de los indicadores LED, los procedimientos de configuración y la funcionalidad, consulte la documentación del usuario proporcionada por Parker.
Válvulas independientes serie "S":
Para los cilindros aislados de una máquina, es preferible colocar la válvula cerca. Por lo tanto, un módulo independiente es el más adecuado ya que se reducen al mínimo el tiempo de respuesta y el consumo de aire. Los módulos periféricos se pueden instalar en la válvula directamente.
En la figura siguiente se proporciona un ejemplo de un dispositivo de solenoide simple serie "S":
35013947 04/2009 35
Esclavos CANopenwww.infoPLC.net
En la figura siguiente se proporciona un ejemplo de un dispositivo de piloto de aire simple serie "S":
Módulos de la isla de la válvula serie "T"
Para grupos pequeños de cilindros que requieren islas de válvulas cortas ubicadas.
Los módulos con funciones distintas y pasos de flujo se pueden combinar en la misma isla múltiple, lo que otorga flexibilidad total para adaptarse a todos los requisitos de la maquinaria.
En la figura siguiente se proporciona un ejemplo de un dispositivo de módulo de isla de válvula serie "T":
36 35013947 04/2009
35013947 04/2009
II
Bus CANopen
35013947 04/2009
www.infoPLC.net
Instalación del software de comunicación CANopen
Tema de esta parte
En esta parte se indican las distintas posibilidades para la configuración, programación y diagnóstico del software de una aplicación CANopen.
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
3 Generalidades 39
4 Configuración de la comunicación ene el bus CANopen 49
5 Implementación del software Catalog Manager 103
6 Programación 163
7 Depuración de la comunicación en el bus CANopen 179
8 Diagnóstico 189
9 Objetos de lenguaje 199
37

Bus CANopen
38 35013947 04/2009
www.infoPLC.net
35013947 04/2009
3
35013947 04/2009
www.infoPLC.net
Generalidades
Finalidad de este capítulo
En este capítulo se describen los principios de instalación del software de CANopen en el bus Modicon M340.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Principio de instalación 40
Método de instalación 41
Rendimiento 42
Dispositivo PDO y asignación de memoria 45
39
www.infoPLC.net
Principio de instalación
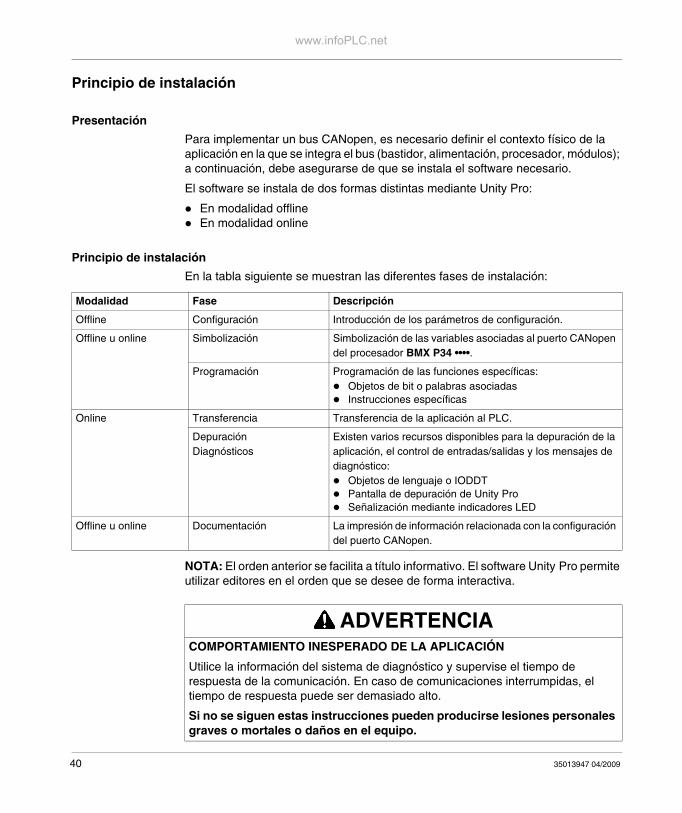
Presentación
Para implementar un bus CANopen, es necesario definir el contexto físico de la aplicación en la que se integra el bus (bastidor, alimentación, procesador, módulos); a continuación, debe asegurarse de que se instala el software necesario.
El software se instala de dos formas distintas mediante Unity Pro:
En modalidad offline En modalidad online
Principio de instalación
En la tabla siguiente se muestran las diferentes fases de instalación:
NOTA: El orden anterior se facilita a título informativo. El software Unity Pro permite utilizar editores en el orden que se desee de forma interactiva.
Modalidad Fase Descripción
Offline Configuración Introducción de los parámetros de configuración.
Offline u online Simbolización Simbolización de las variables asociadas al puerto CANopen del procesador BMX P34 ••••.
Programación Programación de las funciones específicas: Objetos de bit o palabras asociadas Instrucciones específicas
Online Transferencia Transferencia de la aplicación al PLC.
DepuraciónDiagnósticos
Existen varios recursos disponibles para la depuración de la aplicación, el control de entradas/salidas y los mensajes de diagnóstico: Objetos de lenguaje o IODDT Pantalla de depuración de Unity Pro Señalización mediante indicadores LED
Offline u online Documentación La impresión de información relacionada con la configuración del puerto CANopen.
ADVERTENCIACOMPORTAMIENTO INESPERADO DE LA APLICACIÓN
Utilice la información del sistema de diagnóstico y supervise el tiempo de respuesta de la comunicación. En caso de comunicaciones interrumpidas, el tiempo de respuesta puede ser demasiado alto.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
40 35013947 04/2009
www.infoPLC.net
Método de instalación
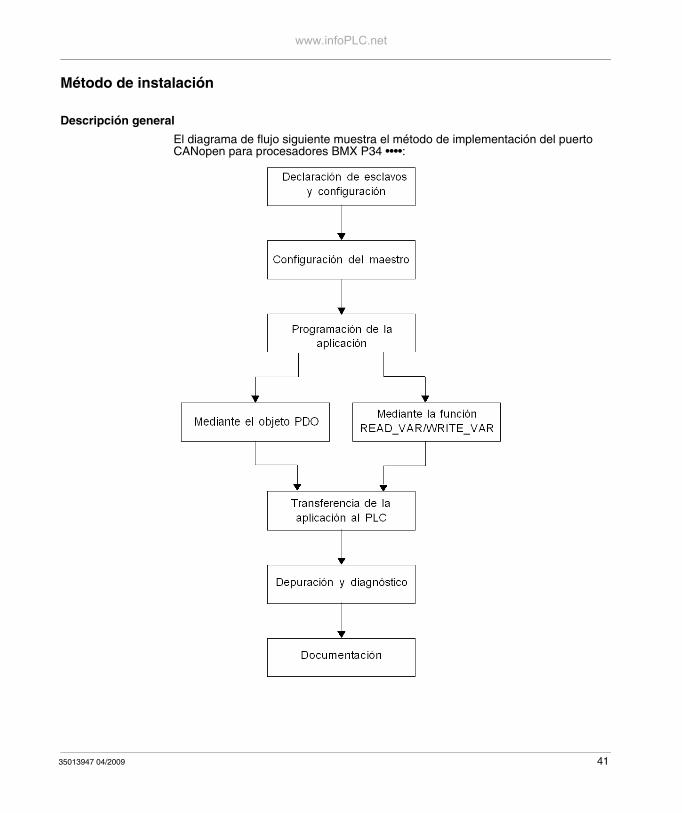
Descripción general
El diagrama de flujo siguiente muestra el método de implementación del puerto CANopen para procesadores BMX P34 ••••:
35013947 04/2009 41
www.infoPLC.net
Rendimiento
Introducción
A continuación se muestran los distintos estados de rendimiento de CANopen.
Impacto en el tiempo de ciclo de tarea
Seguidamente, se indica el tiempo establecido para cada ciclo de tarea:
Tarea Habitual
Entradas CANopen 10 µs/PDO
Salidas CANopen 80 µs + 15 µs/PDO
Diagnóstico 120 μs
42 35013947 04/2009
www.infoPLC.net
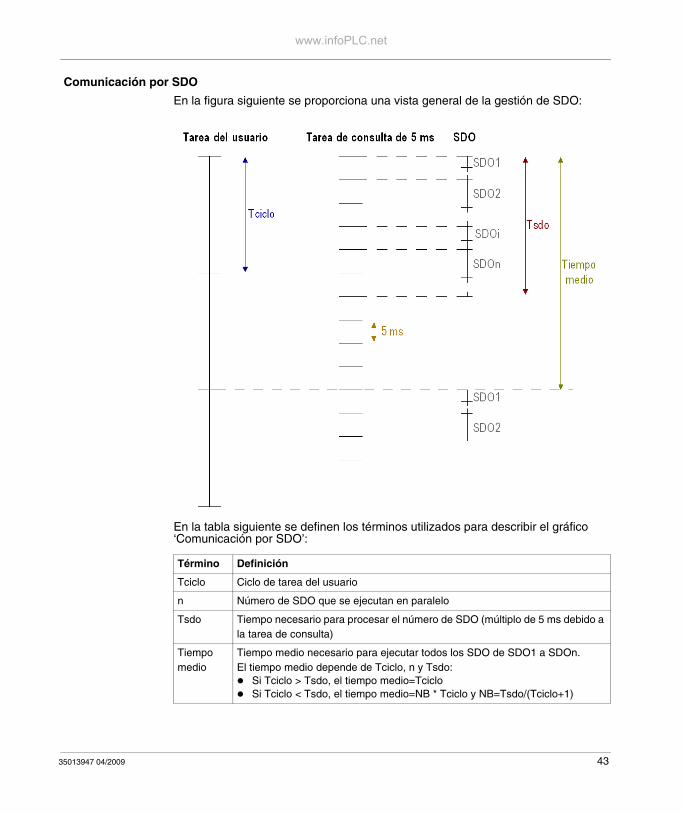
Comunicación por SDO
En la figura siguiente se proporciona una vista general de la gestión de SDO:
En la tabla siguiente se definen los términos utilizados para describir el gráfico ‘Comunicación por SDO’:
Término Definición
Tciclo Ciclo de tarea del usuario
n Número de SDO que se ejecutan en paralelo
Tsdo Tiempo necesario para procesar el número de SDO (múltiplo de 5 ms debido a la tarea de consulta)
Tiempo medio
Tiempo medio necesario para ejecutar todos los SDO de SDO1 a SDOn.El tiempo medio depende de Tciclo, n y Tsdo: Si Tciclo > Tsdo, el tiempo medio=Tciclo Si Tciclo < Tsdo, el tiempo medio=NB * Tciclo y NB=Tsdo/(Tciclo+1)
35013947 04/2009 43
www.infoPLC.net
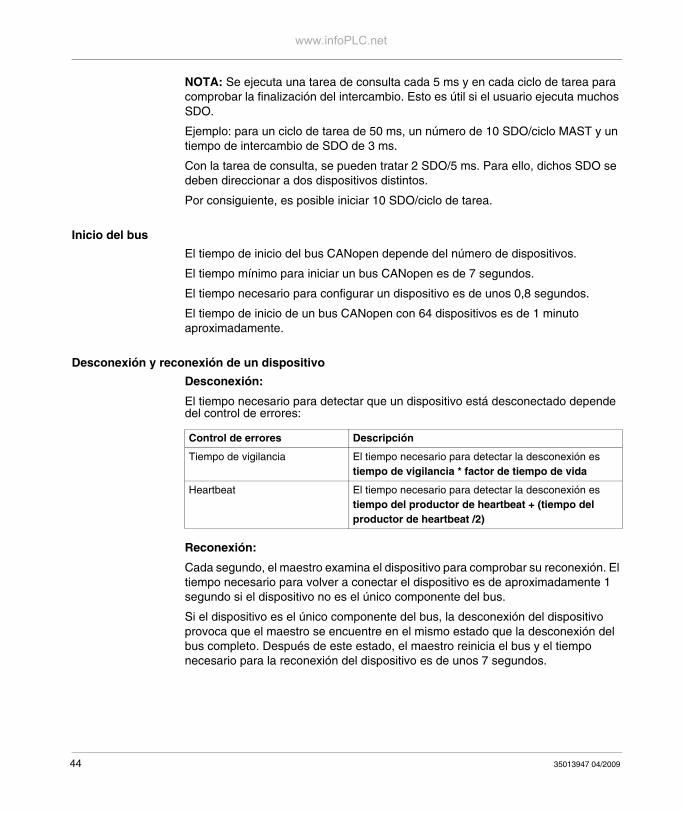
NOTA: Se ejecuta una tarea de consulta cada 5 ms y en cada ciclo de tarea para comprobar la finalización del intercambio. Esto es útil si el usuario ejecuta muchos SDO.
Ejemplo: para un ciclo de tarea de 50 ms, un número de 10 SDO/ciclo MAST y un tiempo de intercambio de SDO de 3 ms.
Con la tarea de consulta, se pueden tratar 2 SDO/5 ms. Para ello, dichos SDO se deben direccionar a dos dispositivos distintos.
Por consiguiente, es posible iniciar 10 SDO/ciclo de tarea.
Inicio del bus
El tiempo de inicio del bus CANopen depende del número de dispositivos.
El tiempo mínimo para iniciar un bus CANopen es de 7 segundos.
El tiempo necesario para configurar un dispositivo es de unos 0,8 segundos.
El tiempo de inicio de un bus CANopen con 64 dispositivos es de 1 minuto aproximadamente.
Desconexión y reconexión de un dispositivo
Desconexión:
El tiempo necesario para detectar que un dispositivo está desconectado depende del control de errores:
Reconexión:
Cada segundo, el maestro examina el dispositivo para comprobar su reconexión. El tiempo necesario para volver a conectar el dispositivo es de aproximadamente 1 segundo si el dispositivo no es el único componente del bus.
Si el dispositivo es el único componente del bus, la desconexión del dispositivo provoca que el maestro se encuentre en el mismo estado que la desconexión del bus completo. Después de este estado, el maestro reinicia el bus y el tiempo necesario para la reconexión del dispositivo es de unos 7 segundos.
Control de errores Descripción
Tiempo de vigilancia El tiempo necesario para detectar la desconexión es tiempo de vigilancia * factor de tiempo de vida
Heartbeat El tiempo necesario para detectar la desconexión es tiempo del productor de heartbeat + (tiempo del productor de heartbeat /2)
44 35013947 04/2009
www.infoPLC.net
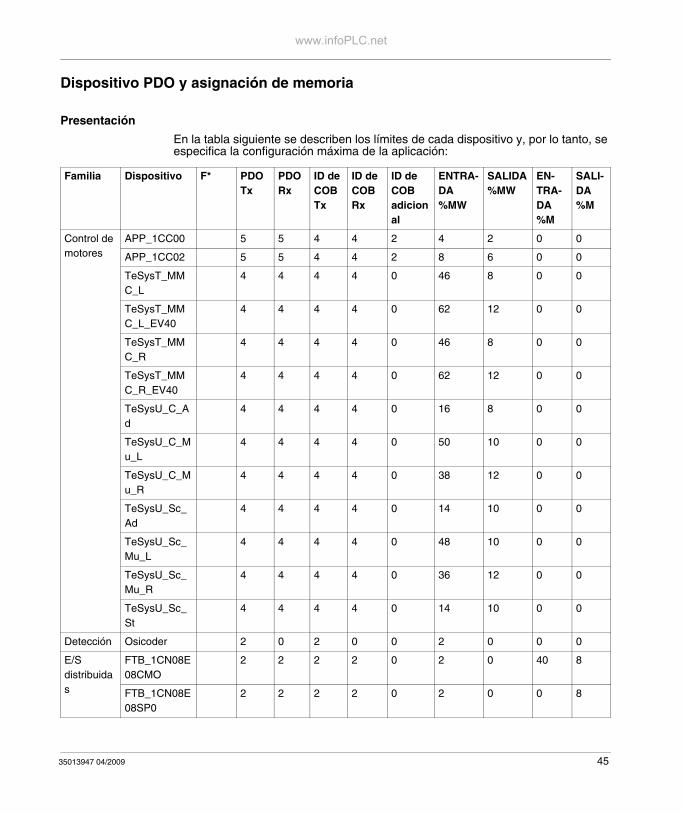
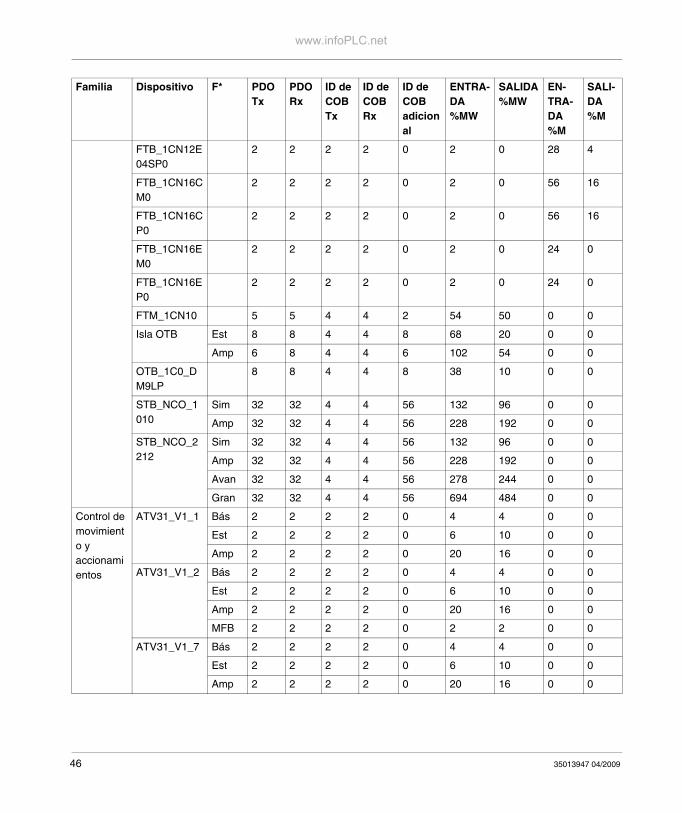
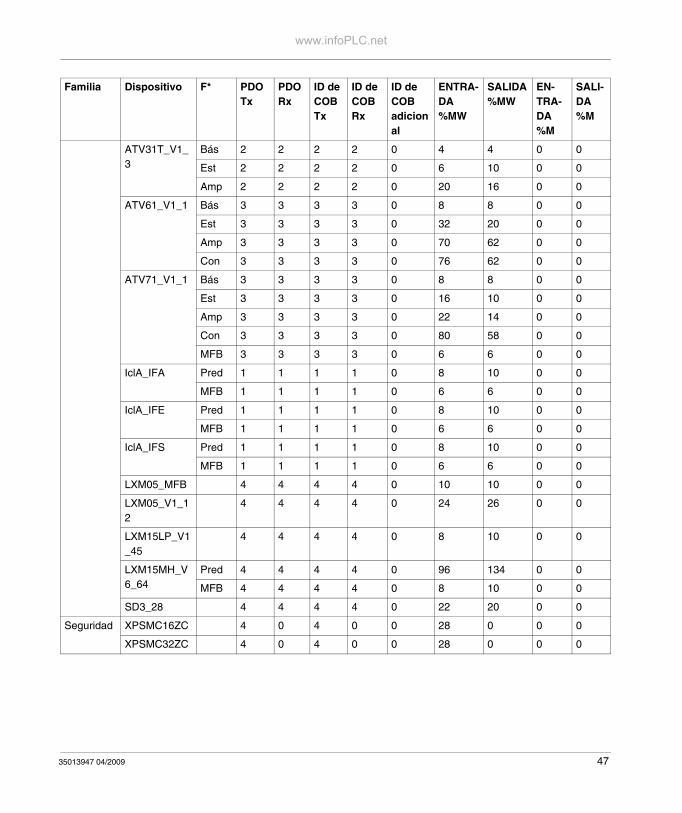
Dispositivo PDO y asignación de memoria
Presentación
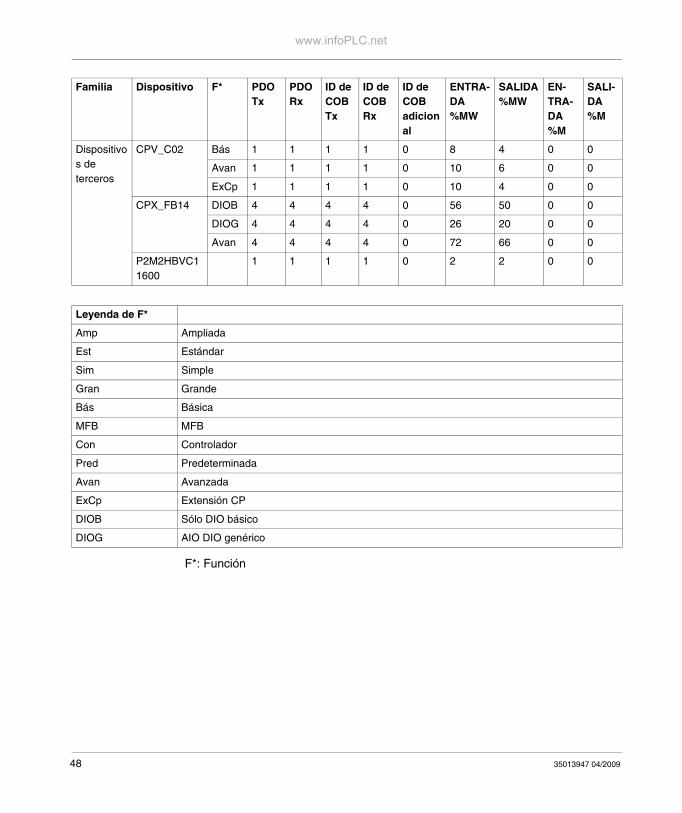
En la tabla siguiente se describen los límites de cada dispositivo y, por lo tanto, se especifica la configuración máxima de la aplicación:
Familia Dispositivo F* PDO Tx
PDO Rx
ID de COB Tx
ID de COB Rx
ID de COB adicional
ENTRA-DA %MW
SALIDA %MW
EN-TRA-DA %M
SALI-DA %M
Control de motores
APP_1CC00 5 5 4 4 2 4 2 0 0
APP_1CC02 5 5 4 4 2 8 6 0 0
TeSysT_MMC_L
4 4 4 4 0 46 8 0 0
TeSysT_MMC_L_EV40
4 4 4 4 0 62 12 0 0
TeSysT_MMC_R
4 4 4 4 0 46 8 0 0
TeSysT_MMC_R_EV40
4 4 4 4 0 62 12 0 0
TeSysU_C_Ad
4 4 4 4 0 16 8 0 0
TeSysU_C_Mu_L
4 4 4 4 0 50 10 0 0
TeSysU_C_Mu_R
4 4 4 4 0 38 12 0 0
TeSysU_Sc_Ad
4 4 4 4 0 14 10 0 0
TeSysU_Sc_Mu_L
4 4 4 4 0 48 10 0 0
TeSysU_Sc_Mu_R
4 4 4 4 0 36 12 0 0
TeSysU_Sc_St
4 4 4 4 0 14 10 0 0
Detección Osicoder 2 0 2 0 0 2 0 0 0
E/S distribuidas
FTB_1CN08E08CMO
2 2 2 2 0 2 0 40 8
FTB_1CN08E08SP0
2 2 2 2 0 2 0 0 8
35013947 04/2009 45
www.infoPLC.net
FTB_1CN12E04SP0
2 2 2 2 0 2 0 28 4
FTB_1CN16CM0
2 2 2 2 0 2 0 56 16
FTB_1CN16CP0
2 2 2 2 0 2 0 56 16
FTB_1CN16EM0
2 2 2 2 0 2 0 24 0
FTB_1CN16EP0
2 2 2 2 0 2 0 24 0
FTM_1CN10 5 5 4 4 2 54 50 0 0
Isla OTB Est 8 8 4 4 8 68 20 0 0
Amp 6 8 4 4 6 102 54 0 0
OTB_1C0_DM9LP
8 8 4 4 8 38 10 0 0
STB_NCO_1010
Sim 32 32 4 4 56 132 96 0 0
Amp 32 32 4 4 56 228 192 0 0
STB_NCO_2212
Sim 32 32 4 4 56 132 96 0 0
Amp 32 32 4 4 56 228 192 0 0
Avan 32 32 4 4 56 278 244 0 0
Gran 32 32 4 4 56 694 484 0 0
Control de movimiento y accionamientos
ATV31_V1_1 Bás 2 2 2 2 0 4 4 0 0
Est 2 2 2 2 0 6 10 0 0
Amp 2 2 2 2 0 20 16 0 0
ATV31_V1_2 Bás 2 2 2 2 0 4 4 0 0
Est 2 2 2 2 0 6 10 0 0
Amp 2 2 2 2 0 20 16 0 0
MFB 2 2 2 2 0 2 2 0 0
ATV31_V1_7 Bás 2 2 2 2 0 4 4 0 0
Est 2 2 2 2 0 6 10 0 0
Amp 2 2 2 2 0 20 16 0 0
Familia Dispositivo F* PDO Tx
PDO Rx
ID de COB Tx
ID de COB Rx
ID de COB adicional
ENTRA-DA %MW
SALIDA %MW
EN-TRA-DA %M
SALI-DA %M
46 35013947 04/2009
www.infoPLC.net
ATV31T_V1_3
Bás 2 2 2 2 0 4 4 0 0
Est 2 2 2 2 0 6 10 0 0
Amp 2 2 2 2 0 20 16 0 0
ATV61_V1_1 Bás 3 3 3 3 0 8 8 0 0
Est 3 3 3 3 0 32 20 0 0
Amp 3 3 3 3 0 70 62 0 0
Con 3 3 3 3 0 76 62 0 0
ATV71_V1_1 Bás 3 3 3 3 0 8 8 0 0
Est 3 3 3 3 0 16 10 0 0
Amp 3 3 3 3 0 22 14 0 0
Con 3 3 3 3 0 80 58 0 0
MFB 3 3 3 3 0 6 6 0 0
IclA_IFA Pred 1 1 1 1 0 8 10 0 0
MFB 1 1 1 1 0 6 6 0 0
IclA_IFE Pred 1 1 1 1 0 8 10 0 0
MFB 1 1 1 1 0 6 6 0 0
IclA_IFS Pred 1 1 1 1 0 8 10 0 0
MFB 1 1 1 1 0 6 6 0 0
LXM05_MFB 4 4 4 4 0 10 10 0 0
LXM05_V1_12
4 4 4 4 0 24 26 0 0
LXM15LP_V1_45
4 4 4 4 0 8 10 0 0
LXM15MH_V6_64
Pred 4 4 4 4 0 96 134 0 0
MFB 4 4 4 4 0 8 10 0 0
SD3_28 4 4 4 4 0 22 20 0 0
Seguridad XPSMC16ZC 4 0 4 0 0 28 0 0 0
XPSMC32ZC 4 0 4 0 0 28 0 0 0
Familia Dispositivo F* PDO Tx
PDO Rx
ID de COB Tx
ID de COB Rx
ID de COB adicional
ENTRA-DA %MW
SALIDA %MW
EN-TRA-DA %M
SALI-DA %M
35013947 04/2009 47
www.infoPLC.net
F*: Función
Dispositivos de terceros
CPV_C02 Bás 1 1 1 1 0 8 4 0 0
Avan 1 1 1 1 0 10 6 0 0
ExCp 1 1 1 1 0 10 4 0 0
CPX_FB14 DIOB 4 4 4 4 0 56 50 0 0
DIOG 4 4 4 4 0 26 20 0 0
Avan 4 4 4 4 0 72 66 0 0
P2M2HBVC11600
1 1 1 1 0 2 2 0 0
Familia Dispositivo F* PDO Tx
PDO Rx
ID de COB Tx
ID de COB Rx
ID de COB adicional
ENTRA-DA %MW
SALIDA %MW
EN-TRA-DA %M
SALI-DA %M
Leyenda de F*
Amp Ampliada
Est Estándar
Sim Simple
Gran Grande
Bás Básica
MFB MFB
Con Controlador
Pred Predeterminada
Avan Avanzada
ExCp Extensión CP
DIOB Sólo DIO básico
DIOG AIO DIO genérico
48 35013947 04/2009
35013947 04/2009
4
Configuración de CANopen
35013947 04/2009
www.infoPLC.net
Configuración de la comunicación ene el bus CANopen
Objetivo
En este capítulo se presenta la configuración del bus de campo CANopen, así como de los maestros y esclavos de bus.
Contenido de este capítulo
Este capítulo contiene las siguientes secciones:
Sección Apartado Página
4.1 Aspectos generales 50
4.2 Configuración del bus 51
4.3 Configuración del dispositivo 61
4.4 Configuración del maestro 87
49
Configuración de CANopenwww.infoPLC.net
4.1 Aspectos generales
Generalidades
Introducción
La configuración de una arquitectura CANopen se integra en Unity Pro.
Después de configurar el canal del maestro CANopen, se crea un nodo en el explorador de proyectos de forma automática. De este modo, es posible iniciar el editor de bus desde este nodo, con el fin de definir la topología del bus y configurar los elementos CANopen.
NOTA: La configuración del bus CANopen no puede modificarse en la modalidad conectada.
50 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
4.2 Configuración del bus
Objeto
En esta sección se presenta la configuración del bus CANopen.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Acceder a la pantalla de configuración del bus CANopen 52
Editor de bus CANopen 54
Adición de un dispositivo en el bus 56
Eliminar, desplazar o duplicar un dispositivo del bus 58
Vista del bus CANopen en el explorador de proyectos 60
35013947 04/2009 51

Configuración de CANopenwww.infoPLC.net
Acceder a la pantalla de configuración del bus CANopen
Presentación
En esta parte se describe cómo acceder a la pantalla de configuración del bus CANopen para un PLC Modicon M340 con una conexión CANopen integrada.
52 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
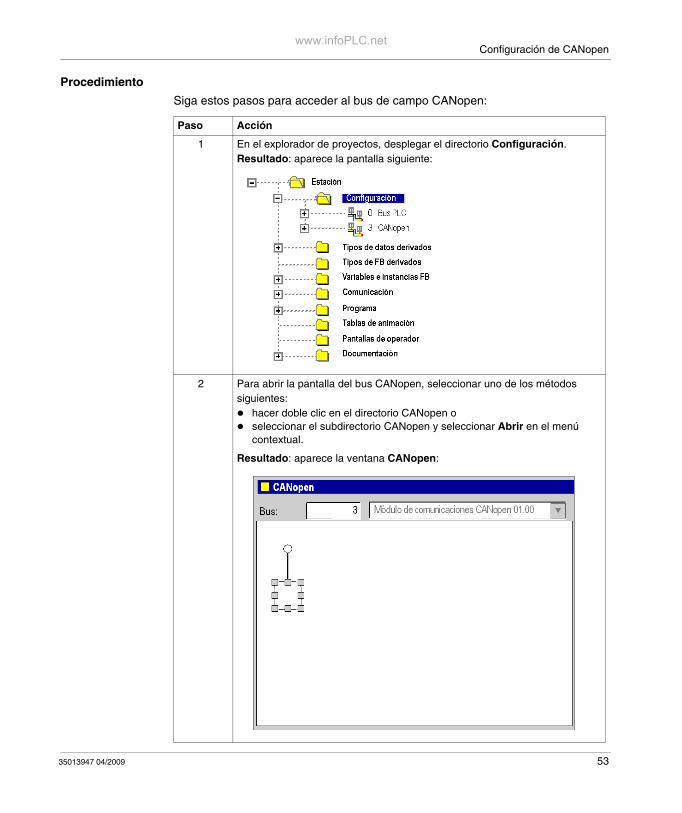
Procedimiento
Siga estos pasos para acceder al bus de campo CANopen:
Paso Acción
1 En el explorador de proyectos, desplegar el directorio Configuración.Resultado: aparece la pantalla siguiente:
2 Para abrir la pantalla del bus CANopen, seleccionar uno de los métodos siguientes: hacer doble clic en el directorio CANopen o seleccionar el subdirectorio CANopen y seleccionar Abrir en el menú
contextual.
Resultado: aparece la ventana CANopen:
35013947 04/2009 53
Configuración de CANopenwww.infoPLC.net
Editor de bus CANopen
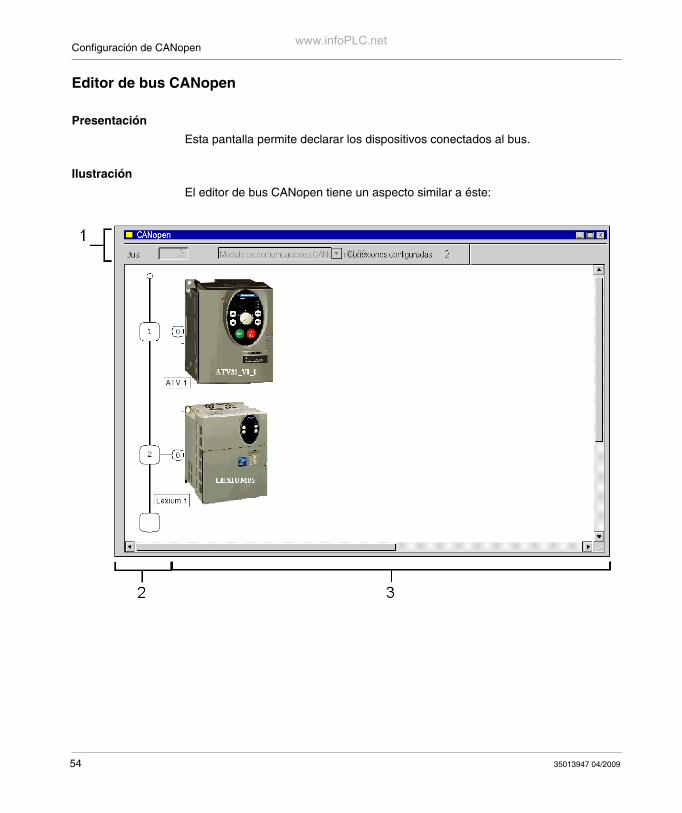
Presentación
Esta pantalla permite declarar los dispositivos conectados al bus.
Ilustración
El editor de bus CANopen tiene un aspecto similar a éste:
54 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
Elementos y funciones
En la tabla siguiente se describen las distintas áreas que constituyen la pantalla de configuración:
Los puntos de conexión disponibles se indican mediante un cuadrado vacío de color blanco.
Número Elemento Función
1 Bus Número de bus.
Conexiones configuradas
Indica el número de puntos de conexión configurados.
2 Área de dirección lógica
Esta área incluye las direcciones de los dispositivos conectados al bus.
3 Área de módulo Esta área incluye los dispositivos conectados al bus.
35013947 04/2009 55
Configuración de CANopenwww.infoPLC.net
Adición de un dispositivo en el bus
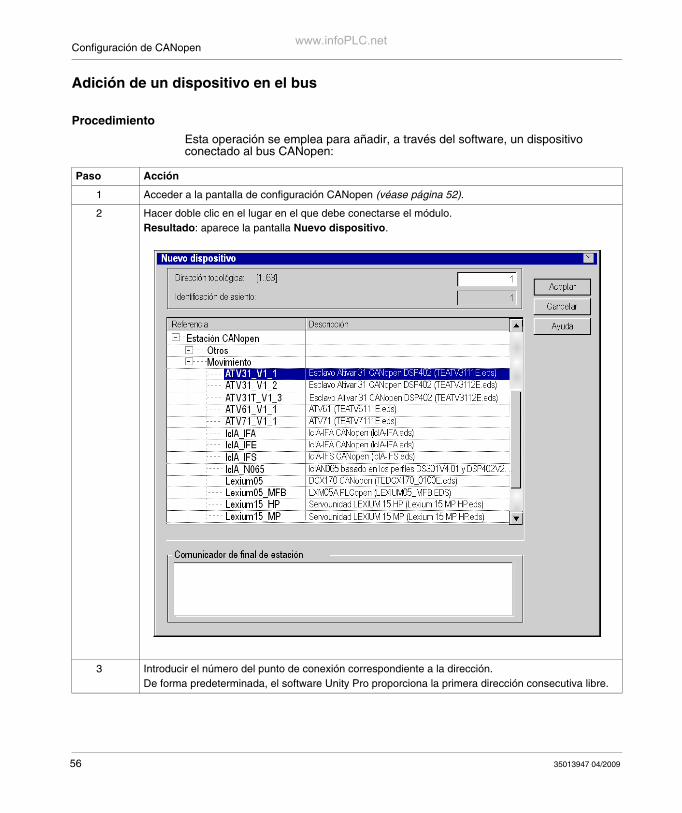
Procedimiento
Esta operación se emplea para añadir, a través del software, un dispositivo conectado al bus CANopen:
Paso Acción
1 Acceder a la pantalla de configuración CANopen (véase página 52).
2 Hacer doble clic en el lugar en el que debe conectarse el módulo.Resultado: aparece la pantalla Nuevo dispositivo.
3 Introducir el número del punto de conexión correspondiente a la dirección.De forma predeterminada, el software Unity Pro proporciona la primera dirección consecutiva libre.
56 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
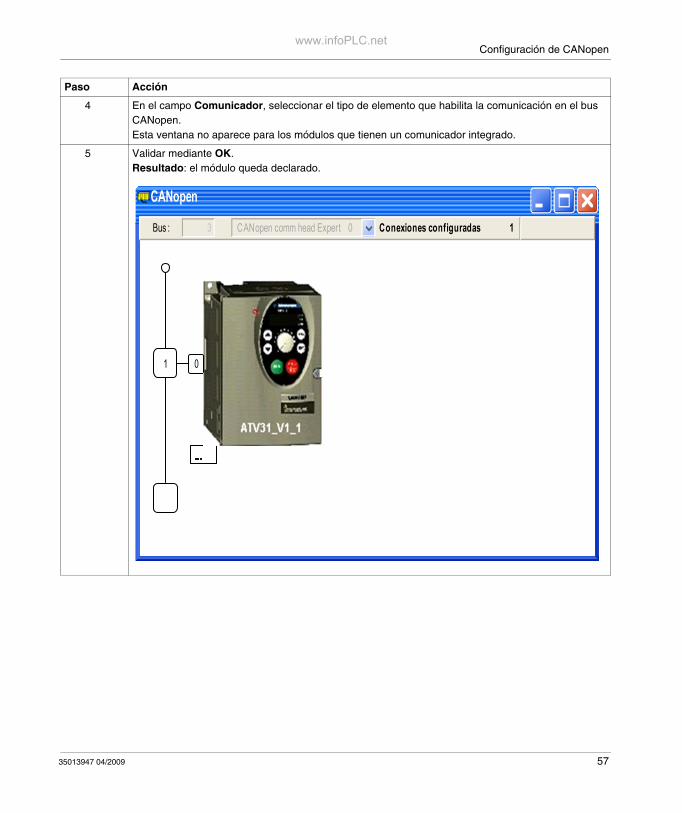
4 En el campo Comunicador, seleccionar el tipo de elemento que habilita la comunicación en el bus CANopen.Esta ventana no aparece para los módulos que tienen un comunicador integrado.
5 Validar mediante OK.Resultado: el módulo queda declarado.
Paso Acción
CANopen comm head Expert 0 Conexiones configuradas 1
CANopen
Bus : 3
1 0
35013947 04/2009 57
Configuración de CANopenwww.infoPLC.net
Eliminar, desplazar o duplicar un dispositivo del bus
Procedimiento de eliminación de un dispositivo
Esta operación se emplea para eliminar, a través del software, un dispositivo conectado al bus CANopen:
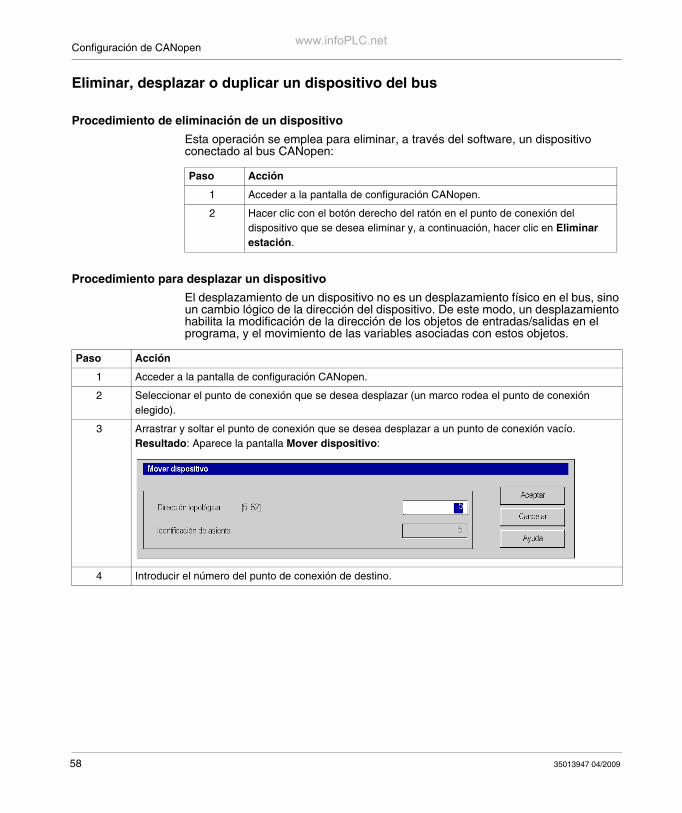
Procedimiento para desplazar un dispositivo
El desplazamiento de un dispositivo no es un desplazamiento físico en el bus, sino un cambio lógico de la dirección del dispositivo. De este modo, un desplazamiento habilita la modificación de la dirección de los objetos de entradas/salidas en el programa, y el movimiento de las variables asociadas con estos objetos.
Paso Acción
1 Acceder a la pantalla de configuración CANopen.
2 Hacer clic con el botón derecho del ratón en el punto de conexión del dispositivo que se desea eliminar y, a continuación, hacer clic en Eliminar estación.
Paso Acción
1 Acceder a la pantalla de configuración CANopen.
2 Seleccionar el punto de conexión que se desea desplazar (un marco rodea el punto de conexión elegido).
3 Arrastrar y soltar el punto de conexión que se desea desplazar a un punto de conexión vacío.Resultado: Aparece la pantalla Mover dispositivo:
4 Introducir el número del punto de conexión de destino.
58 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
Procedimiento para duplicar un dispositivo
Esta función es similar a la función de desplazamiento de un dispositivo:
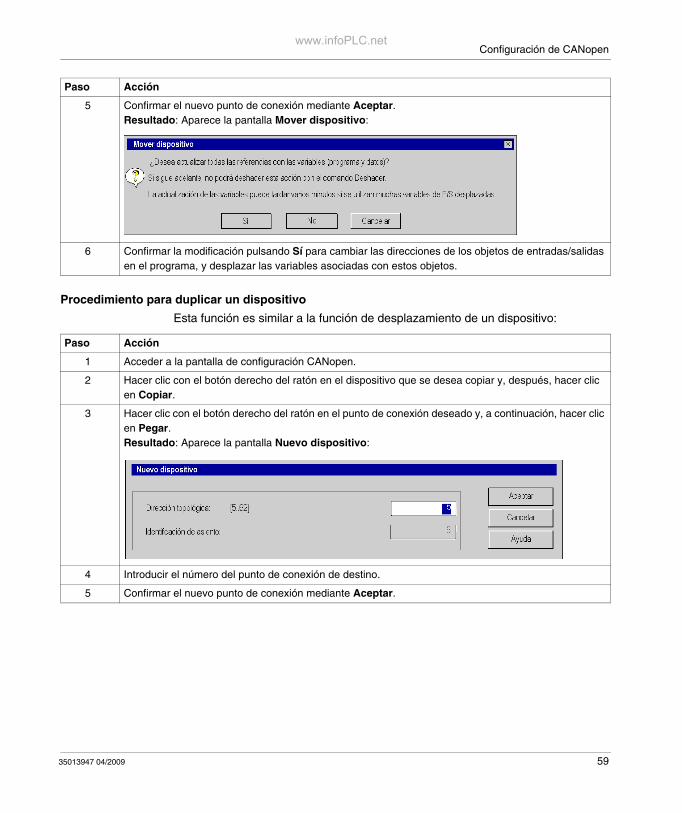
5 Confirmar el nuevo punto de conexión mediante Aceptar.Resultado: Aparece la pantalla Mover dispositivo:
6 Confirmar la modificación pulsando Sí para cambiar las direcciones de los objetos de entradas/salidas en el programa, y desplazar las variables asociadas con estos objetos.
Paso Acción
Paso Acción
1 Acceder a la pantalla de configuración CANopen.
2 Hacer clic con el botón derecho del ratón en el dispositivo que se desea copiar y, después, hacer clic en Copiar.
3 Hacer clic con el botón derecho del ratón en el punto de conexión deseado y, a continuación, hacer clic en Pegar.Resultado: Aparece la pantalla Nuevo dispositivo:
4 Introducir el número del punto de conexión de destino.
5 Confirmar el nuevo punto de conexión mediante Aceptar.
35013947 04/2009 59
Configuración de CANopenwww.infoPLC.net
Vista del bus CANopen en el explorador de proyectos
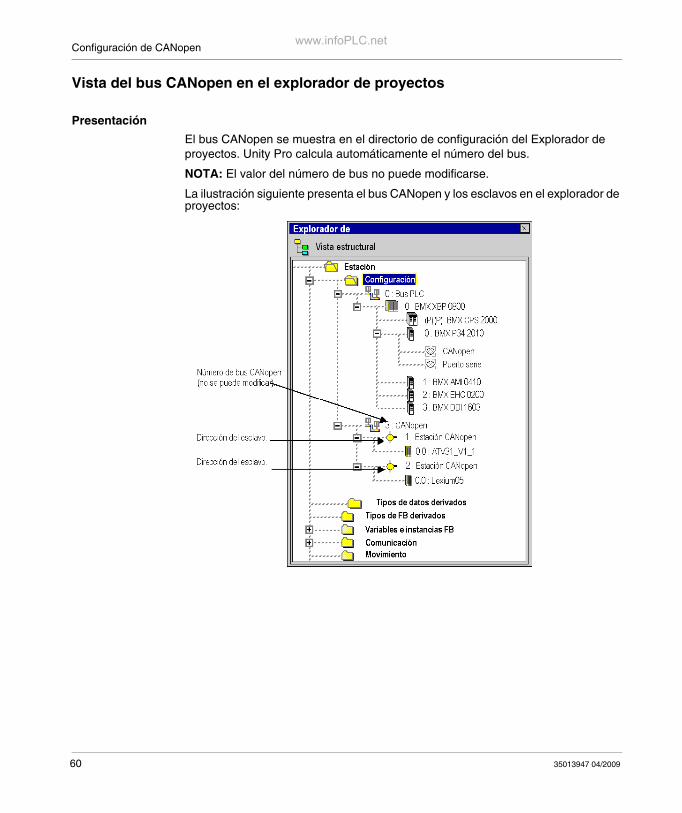
Presentación
El bus CANopen se muestra en el directorio de configuración del Explorador de proyectos. Unity Pro calcula automáticamente el número del bus.
NOTA: El valor del número de bus no puede modificarse.
La ilustración siguiente presenta el bus CANopen y los esclavos en el explorador de proyectos:
60 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
4.3 Configuración del dispositivo
Objeto
Esta sección presenta la configuración de los parámetros iniciales de los dispositivos CANopen.
Hay tres formas de configurar los parámetros iniciales:
configuración mediante Unity, configuración mediante una herramienta externa y configuración manual.
NOTA: Antes de configurar un dispositivo, se recomienda encarecidamente que seleccione la función, cuando esté disponible.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Funciones de los esclavos 62
Configuración mediante Unity con las CPU 2010/2030 66
Configuración mediante Unity con las CPU 20102/20302 72
Configuración con una herramienta externa: Software de configuración 82
Configuración manual 85
35013947 04/2009 61
Configuración de CANopenwww.infoPLC.net
Funciones de los esclavos
Presentación
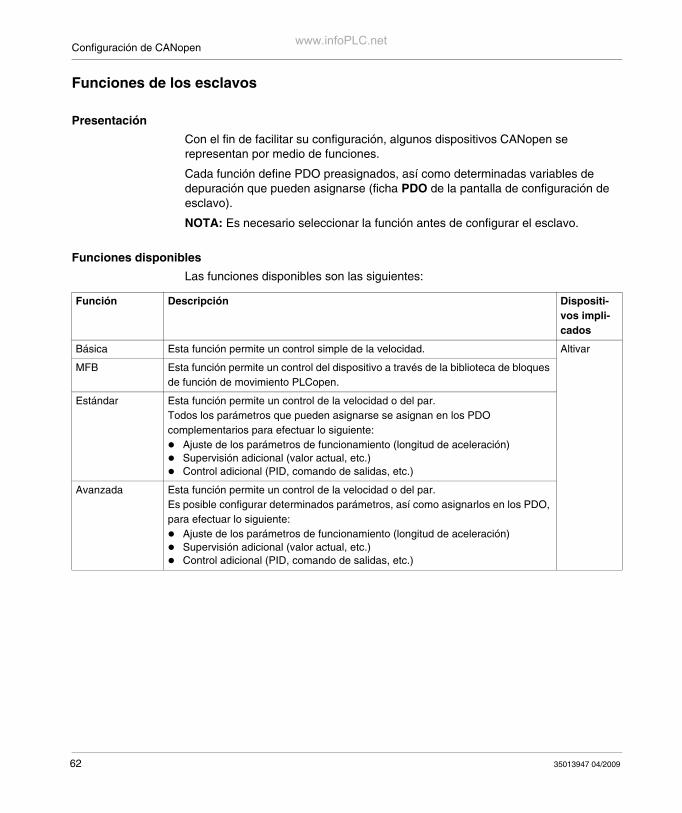
Con el fin de facilitar su configuración, algunos dispositivos CANopen se representan por medio de funciones.
Cada función define PDO preasignados, así como determinadas variables de depuración que pueden asignarse (ficha PDO de la pantalla de configuración de esclavo).
NOTA: Es necesario seleccionar la función antes de configurar el esclavo.
Funciones disponibles
Las funciones disponibles son las siguientes:
Función Descripción Dispositi-vos impli-cados
Básica Esta función permite un control simple de la velocidad. Altivar
MFB Esta función permite un control del dispositivo a través de la biblioteca de bloques de función de movimiento PLCopen.
Estándar Esta función permite un control de la velocidad o del par.Todos los parámetros que pueden asignarse se asignan en los PDO complementarios para efectuar lo siguiente: Ajuste de los parámetros de funcionamiento (longitud de aceleración) Supervisión adicional (valor actual, etc.) Control adicional (PID, comando de salidas, etc.)
Avanzada Esta función permite un control de la velocidad o del par. Es posible configurar determinados parámetros, así como asignarlos en los PDO, para efectuar lo siguiente: Ajuste de los parámetros de funcionamiento (longitud de aceleración) Supervisión adicional (valor actual, etc.) Control adicional (PID, comando de salidas, etc.)
62 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
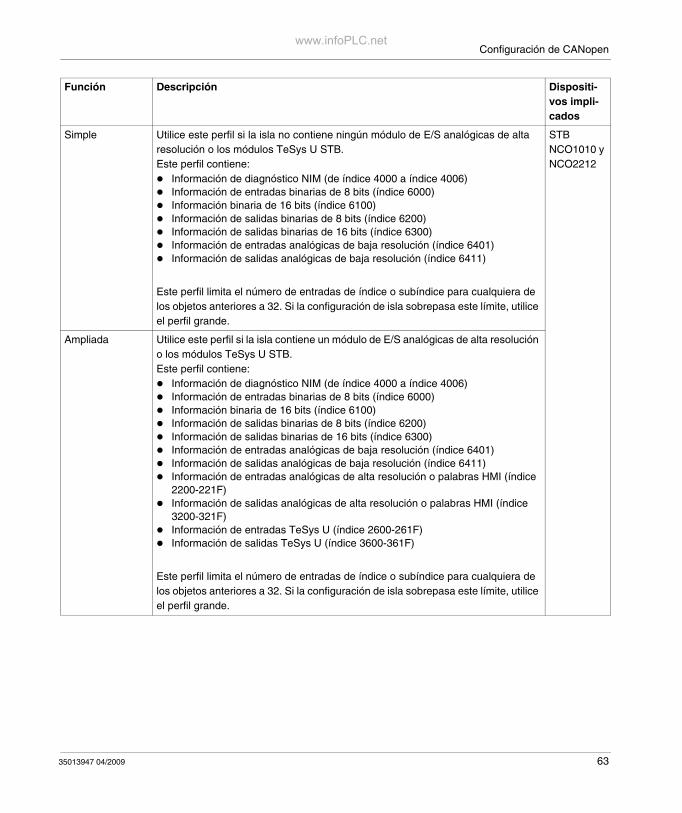
Simple Utilice este perfil si la isla no contiene ningún módulo de E/S analógicas de alta resolución o los módulos TeSys U STB. Este perfil contiene: Información de diagnóstico NIM (de índice 4000 a índice 4006) Información de entradas binarias de 8 bits (índice 6000) Información binaria de 16 bits (índice 6100) Información de salidas binarias de 8 bits (índice 6200) Información de salidas binarias de 16 bits (índice 6300) Información de entradas analógicas de baja resolución (índice 6401) Información de salidas analógicas de baja resolución (índice 6411)
Este perfil limita el número de entradas de índice o subíndice para cualquiera de los objetos anteriores a 32. Si la configuración de isla sobrepasa este límite, utilice el perfil grande.
STB NCO1010 y NCO2212
Ampliada Utilice este perfil si la isla contiene un módulo de E/S analógicas de alta resolución o los módulos TeSys U STB. Este perfil contiene: Información de diagnóstico NIM (de índice 4000 a índice 4006) Información de entradas binarias de 8 bits (índice 6000) Información binaria de 16 bits (índice 6100) Información de salidas binarias de 8 bits (índice 6200) Información de salidas binarias de 16 bits (índice 6300) Información de entradas analógicas de baja resolución (índice 6401) Información de salidas analógicas de baja resolución (índice 6411) Información de entradas analógicas de alta resolución o palabras HMI (índice
2200-221F) Información de salidas analógicas de alta resolución o palabras HMI (índice
3200-321F) Información de entradas TeSys U (índice 2600-261F) Información de salidas TeSys U (índice 3600-361F)
Este perfil limita el número de entradas de índice o subíndice para cualquiera de los objetos anteriores a 32. Si la configuración de isla sobrepasa este límite, utilice el perfil grande.
Función Descripción Dispositi-vos impli-cados
35013947 04/2009 63
Configuración de CANopenwww.infoPLC.net
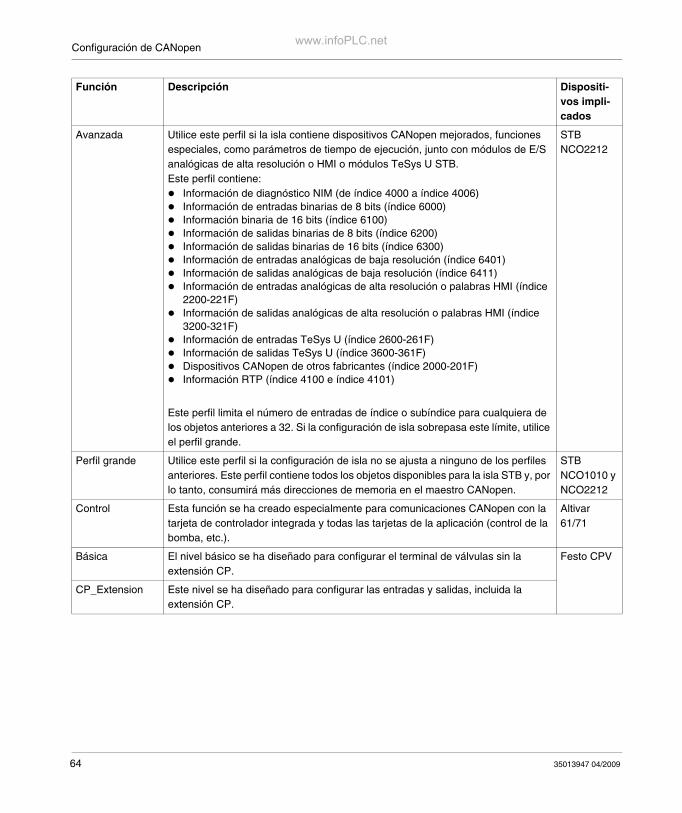
Avanzada Utilice este perfil si la isla contiene dispositivos CANopen mejorados, funciones especiales, como parámetros de tiempo de ejecución, junto con módulos de E/S analógicas de alta resolución o HMI o módulos TeSys U STB. Este perfil contiene: Información de diagnóstico NIM (de índice 4000 a índice 4006) Información de entradas binarias de 8 bits (índice 6000) Información binaria de 16 bits (índice 6100) Información de salidas binarias de 8 bits (índice 6200) Información de salidas binarias de 16 bits (índice 6300) Información de entradas analógicas de baja resolución (índice 6401) Información de salidas analógicas de baja resolución (índice 6411) Información de entradas analógicas de alta resolución o palabras HMI (índice
2200-221F) Información de salidas analógicas de alta resolución o palabras HMI (índice
3200-321F) Información de entradas TeSys U (índice 2600-261F) Información de salidas TeSys U (índice 3600-361F) Dispositivos CANopen de otros fabricantes (índice 2000-201F) Información RTP (índice 4100 e índice 4101)
Este perfil limita el número de entradas de índice o subíndice para cualquiera de los objetos anteriores a 32. Si la configuración de isla sobrepasa este límite, utilice el perfil grande.
STB NCO2212
Perfil grande Utilice este perfil si la configuración de isla no se ajusta a ninguno de los perfiles anteriores. Este perfil contiene todos los objetos disponibles para la isla STB y, por lo tanto, consumirá más direcciones de memoria en el maestro CANopen.
STB NCO1010 y NCO2212
Control Esta función se ha creado especialmente para comunicaciones CANopen con la tarjeta de controlador integrada y todas las tarjetas de la aplicación (control de la bomba, etc.).
Altivar 61/71
Básica El nivel básico se ha diseñado para configurar el terminal de válvulas sin la extensión CP.
Festo CPV
CP_Extension Este nivel se ha diseñado para configurar las entradas y salidas, incluida la extensión CP.
Función Descripción Dispositi-vos impli-cados
64 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
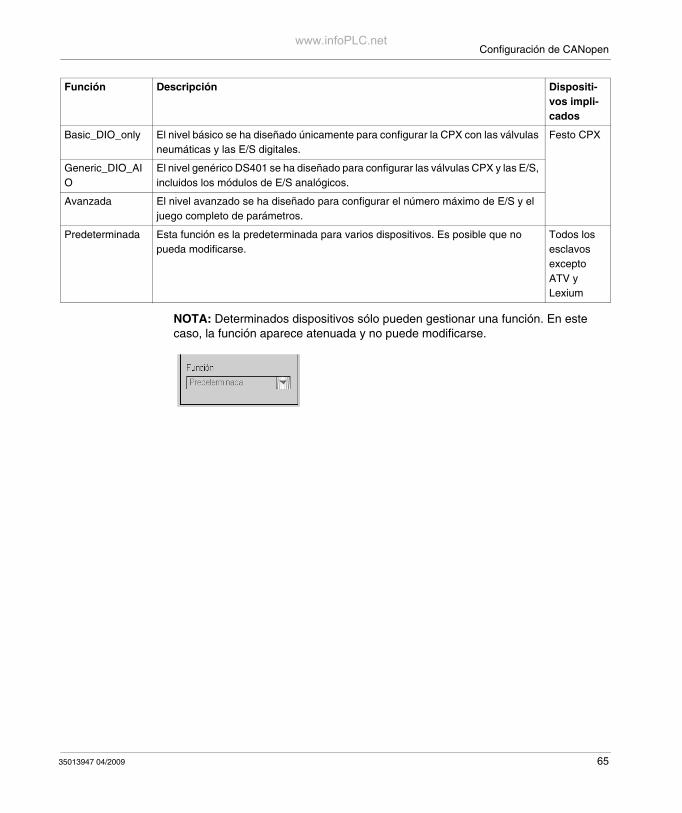
NOTA: Determinados dispositivos sólo pueden gestionar una función. En este caso, la función aparece atenuada y no puede modificarse.
Basic_DIO_only El nivel básico se ha diseñado únicamente para configurar la CPX con las válvulas neumáticas y las E/S digitales.
Festo CPX
Generic_DIO_AIO
El nivel genérico DS401 se ha diseñado para configurar las válvulas CPX y las E/S, incluidos los módulos de E/S analógicos.
Avanzada El nivel avanzado se ha diseñado para configurar el número máximo de E/S y el juego completo de parámetros.
Predeterminada Esta función es la predeterminada para varios dispositivos. Es posible que no pueda modificarse.
Todos los esclavos excepto ATV y Lexium
Función Descripción Dispositi-vos impli-cados
35013947 04/2009 65
Configuración de CANopenwww.infoPLC.net
Configuración mediante Unity con las CPU 2010/2030
Presentación
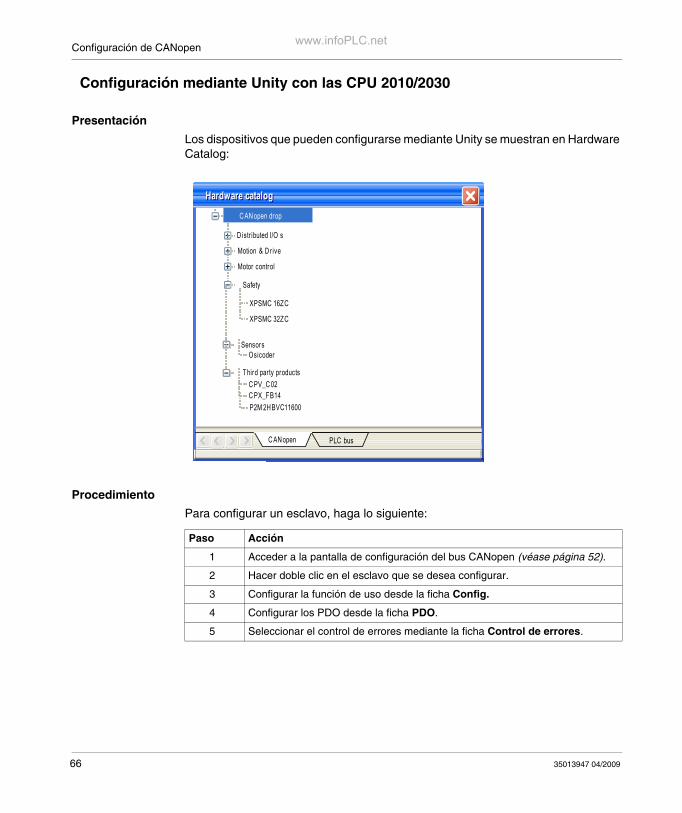
Los dispositivos que pueden configurarse mediante Unity se muestran en Hardware Catalog:
Procedimiento
Para configurar un esclavo, haga lo siguiente:
Hardware catalogHardware catalog
Distr ibuted I/O s
Motion & D r ive
Motor control
Safety
XPSMC 16ZC
XPSMC 32ZC
SensorsOsicoder
Third party products
C PV_C 02C PX_FB14
P2M 2HBVC11600
CAN open drop
C ANopen PLC bus
Paso Acción
1 Acceder a la pantalla de configuración del bus CANopen (véase página 52).
2 Hacer doble clic en el esclavo que se desea configurar.
3 Configurar la función de uso desde la ficha Config.
4 Configurar los PDO desde la ficha PDO.
5 Seleccionar el control de errores mediante la ficha Control de errores.
66 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
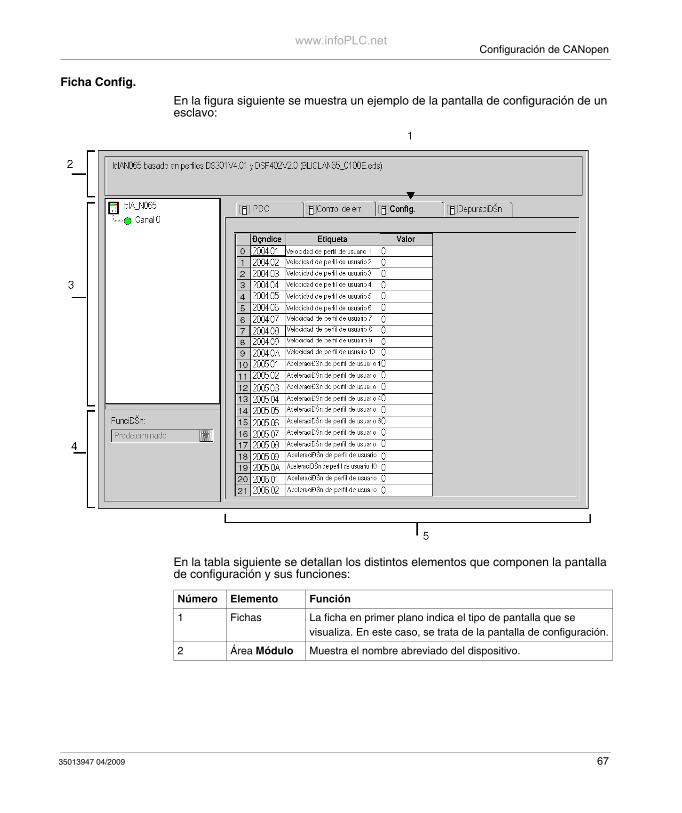
Ficha Config.
En la figura siguiente se muestra un ejemplo de la pantalla de configuración de un esclavo:
En la tabla siguiente se detallan los distintos elementos que componen la pantalla de configuración y sus funciones:
Número Elemento Función
1 Fichas La ficha en primer plano indica el tipo de pantalla que se visualiza. En este caso, se trata de la pantalla de configuración.
2 Área Módulo Muestra el nombre abreviado del dispositivo.
35013947 04/2009 67
Configuración de CANopenwww.infoPLC.net
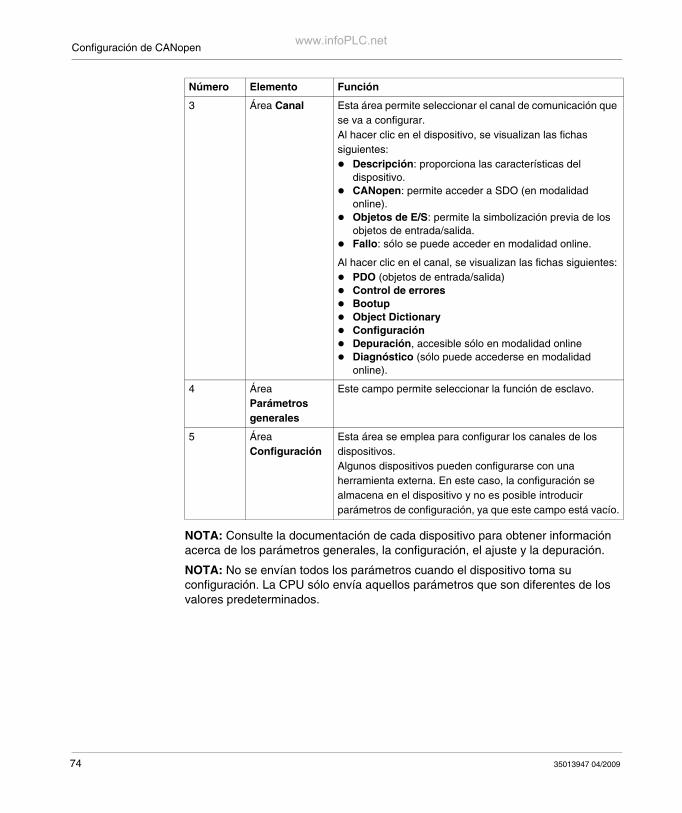
NOTA: Consulte la documentación de cada dispositivo para obtener información acerca de los parámetros generales, la configuración, el ajuste y la depuración.
NOTA: No se envían todos los parámetros cuando el dispositivo toma su configuración. La CPU sólo envía aquellos parámetros que son diferentes de los valores predeterminados.
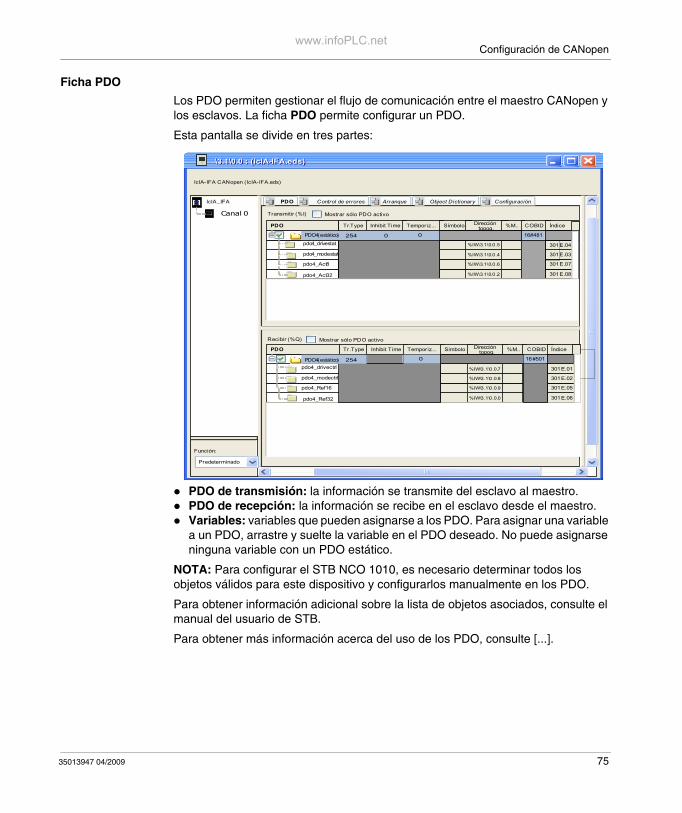
Ficha PDO
Los PDO permiten gestionar el flujo de comunicación entre el maestro CANopen y los esclavos. La ficha PDO permite configurar un PDO.
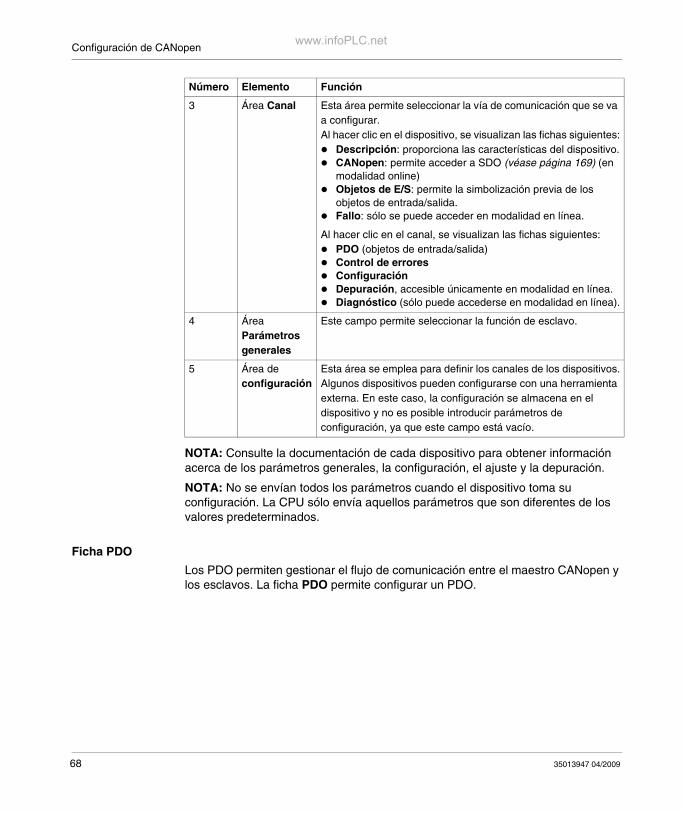
3 Área Canal Esta área permite seleccionar la vía de comunicación que se va a configurar.Al hacer clic en el dispositivo, se visualizan las fichas siguientes: Descripción: proporciona las características del dispositivo. CANopen: permite acceder a SDO (véase página 169) (en
modalidad online) Objetos de E/S: permite la simbolización previa de los
objetos de entrada/salida. Fallo: sólo se puede acceder en modalidad en línea.
Al hacer clic en el canal, se visualizan las fichas siguientes: PDO (objetos de entrada/salida) Control de errores Configuración Depuración, accesible únicamente en modalidad en línea. Diagnóstico (sólo puede accederse en modalidad en línea).
4 Área Parámetros generales
Este campo permite seleccionar la función de esclavo.
5 Área de configuración
Esta área se emplea para definir los canales de los dispositivos.Algunos dispositivos pueden configurarse con una herramienta externa. En este caso, la configuración se almacena en el dispositivo y no es posible introducir parámetros de configuración, ya que este campo está vacío.
Número Elemento Función
68 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
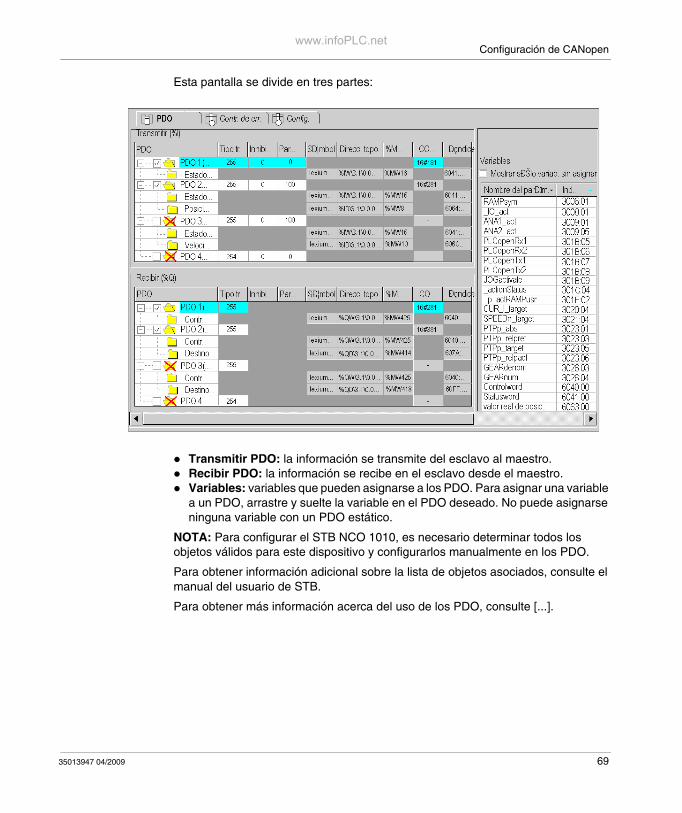
Esta pantalla se divide en tres partes:
Transmitir PDO: la información se transmite del esclavo al maestro. Recibir PDO: la información se recibe en el esclavo desde el maestro. Variables: variables que pueden asignarse a los PDO. Para asignar una variable
a un PDO, arrastre y suelte la variable en el PDO deseado. No puede asignarse ninguna variable con un PDO estático.
NOTA: Para configurar el STB NCO 1010, es necesario determinar todos los objetos válidos para este dispositivo y configurarlos manualmente en los PDO.
Para obtener información adicional sobre la lista de objetos asociados, consulte el manual del usuario de STB.
Para obtener más información acerca del uso de los PDO, consulte [...].
35013947 04/2009 69
Configuración de CANopenwww.infoPLC.net
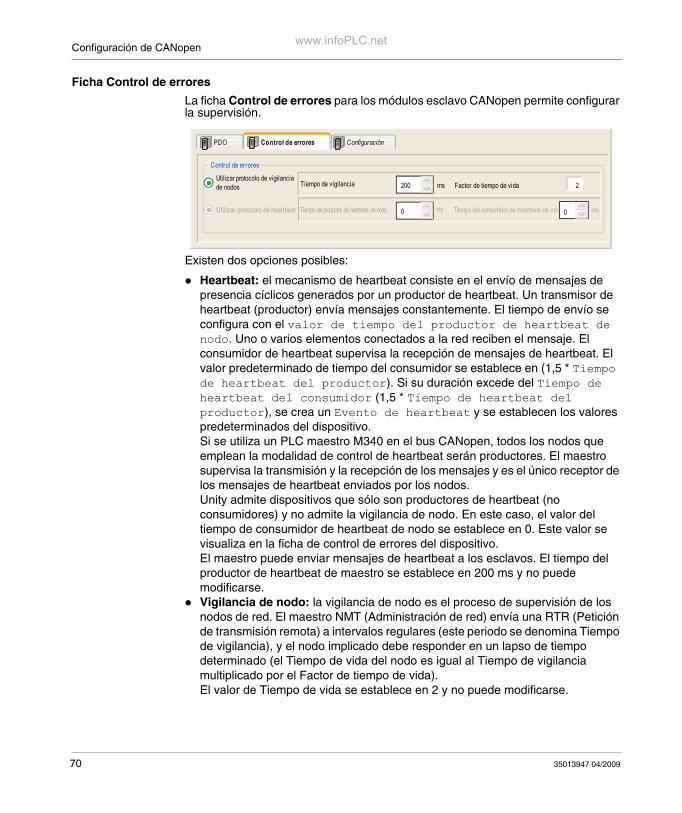
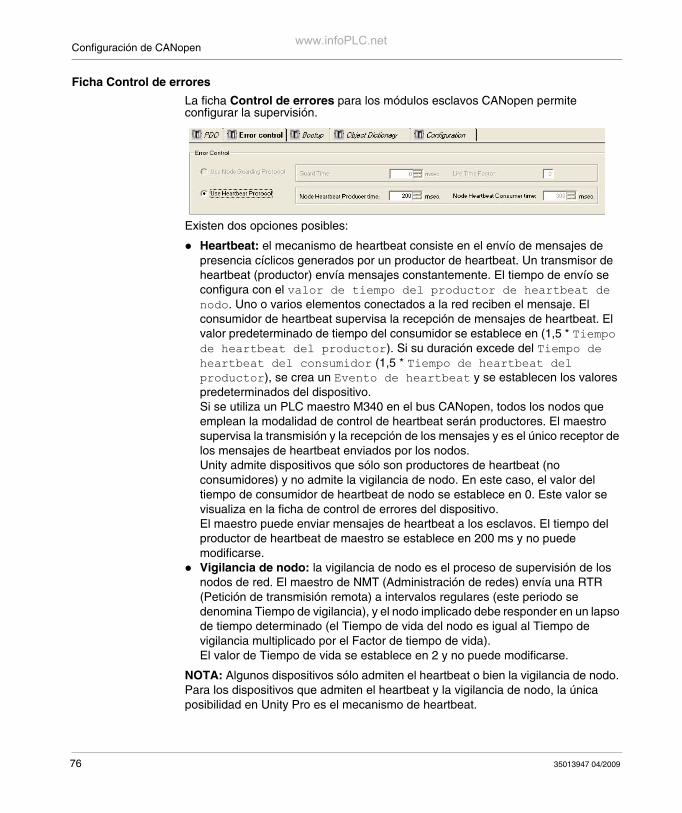
Ficha Control de errores
La ficha Control de errores para los módulos esclavo CANopen permite configurar la supervisión.
Existen dos opciones posibles:
Heartbeat: el mecanismo de heartbeat consiste en el envío de mensajes de presencia cíclicos generados por un productor de heartbeat. Un transmisor de heartbeat (productor) envía mensajes constantemente. El tiempo de envío se configura con el valor de tiempo del productor de heartbeat de nodo. Uno o varios elementos conectados a la red reciben el mensaje. El consumidor de heartbeat supervisa la recepción de mensajes de heartbeat. El valor predeterminado de tiempo del consumidor se establece en (1,5 * Tiempo de heartbeat del productor). Si su duración excede del Tiempo de heartbeat del consumidor (1,5 * Tiempo de heartbeat del productor), se crea un Evento de heartbeat y se establecen los valores predeterminados del dispositivo.Si se utiliza un PLC maestro M340 en el bus CANopen, todos los nodos que emplean la modalidad de control de heartbeat serán productores. El maestro supervisa la transmisión y la recepción de los mensajes y es el único receptor de los mensajes de heartbeat enviados por los nodos.Unity admite dispositivos que sólo son productores de heartbeat (no consumidores) y no admite la vigilancia de nodo. En este caso, el valor del tiempo de consumidor de heartbeat de nodo se establece en 0. Este valor se visualiza en la ficha de control de errores del dispositivo.El maestro puede enviar mensajes de heartbeat a los esclavos. El tiempo del productor de heartbeat de maestro se establece en 200 ms y no puede modificarse.
Vigilancia de nodo: la vigilancia de nodo es el proceso de supervisión de los nodos de red. El maestro NMT (Administración de red) envía una RTR (Petición de transmisión remota) a intervalos regulares (este periodo se denomina Tiempo de vigilancia), y el nodo implicado debe responder en un lapso de tiempo determinado (el Tiempo de vida del nodo es igual al Tiempo de vigilancia multiplicado por el Factor de tiempo de vida).El valor de Tiempo de vida se establece en 2 y no puede modificarse.
Control de errores
Configuración Control de errores PDO
Tiempo de vigilancia 200 Factor de tiempo de vidamsUtilizar protocolo de vigilancia de nodos
Utilizar protocolo de heartbeat 0Tiempo del productor de heartbeat de nodo Tiempo del consumidor de heartbeat de nodoms 0 ms
2
70 35013947 04/2009

Configuración de CANopenwww.infoPLC.net
NOTA: Algunos dispositivos sólo admiten el heartbeat o la vigilancia de nodo. Para los dispositivos que admiten el heartbeat y la vigilancia de nodo, la única posibilidad en Unity Pro es el mecanismo de heartbeat.
35013947 04/2009 71
Configuración de CANopenwww.infoPLC.net
Configuración mediante Unity con las CPU 20102/20302
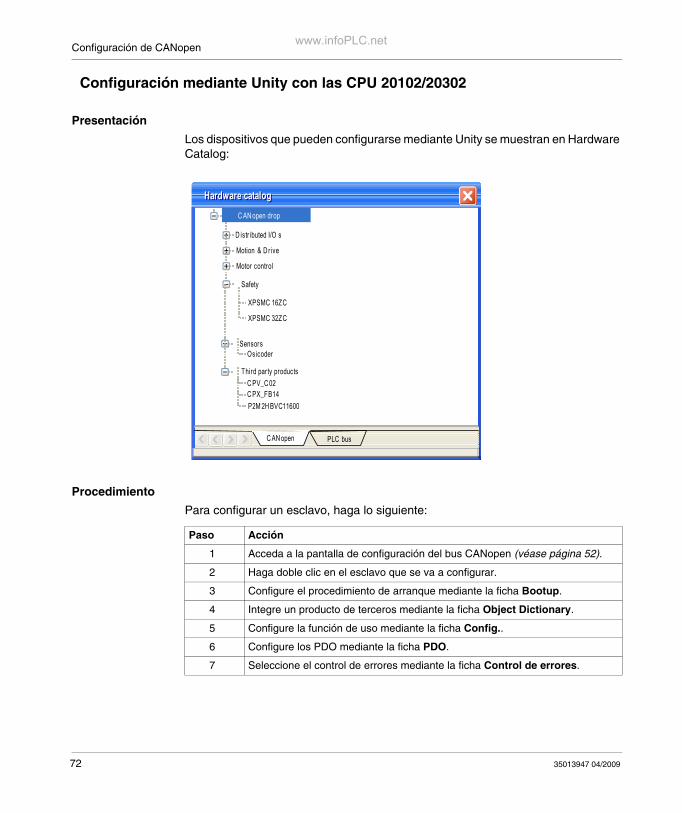
Presentación
Los dispositivos que pueden configurarse mediante Unity se muestran en Hardware Catalog:
Procedimiento
Para configurar un esclavo, haga lo siguiente:
Hardware catalogHardware catalog
D istr ibuted I/O s
Motion & D r ive
Motor control
Safety
XPSMC 16ZC
XPSMC 32ZC
SensorsOsicoder
Third par ty products
C PV_C 02C PX_FB14
P2M 2H BVC11600
C AN open drop
C AN open PLC bus
Paso Acción
1 Acceda a la pantalla de configuración del bus CANopen (véase página 52).
2 Haga doble clic en el esclavo que se va a configurar.
3 Configure el procedimiento de arranque mediante la ficha Bootup.
4 Integre un producto de terceros mediante la ficha Object Dictionary.
5 Configure la función de uso mediante la ficha Config..
6 Configure los PDO mediante la ficha PDO.
7 Seleccione el control de errores mediante la ficha Control de errores.
72 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
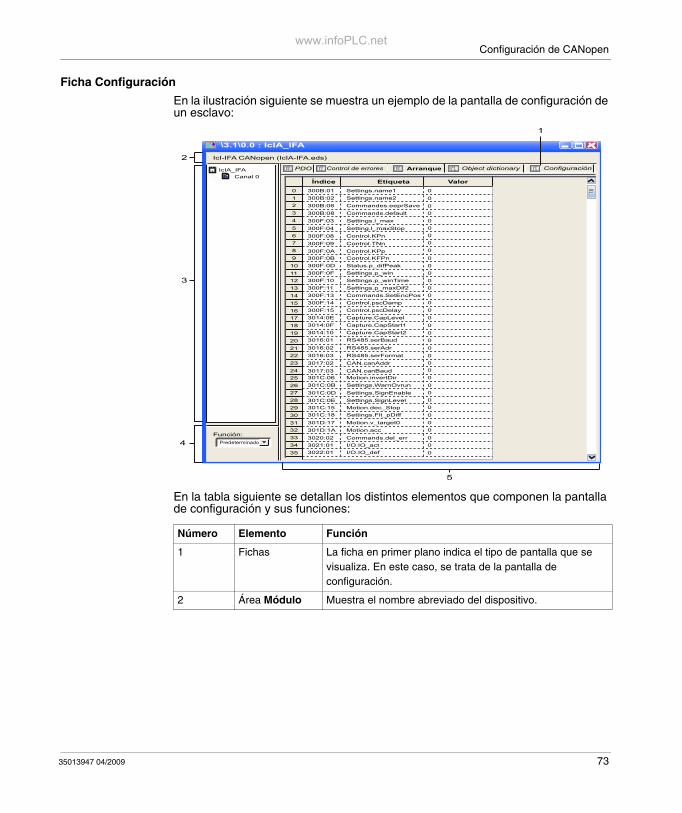
Ficha Configuración
En la ilustración siguiente se muestra un ejemplo de la pantalla de configuración de un esclavo:
En la tabla siguiente se detallan los distintos elementos que componen la pantalla de configuración y sus funciones:
Número Elemento Función
1 Fichas La ficha en primer plano indica el tipo de pantalla que se visualiza. En este caso, se trata de la pantalla de configuración.
2 Área Módulo Muestra el nombre abreviado del dispositivo.
\3.1\0.0 : IcIA_IFA
IcI-IFA CANopen (IcIA-IFA.eds)
IcIA_IFACanal 0
Función:MASTPredeterminado
PDO Arranque
Índice Etiqueta Valor
Control de errores Object dictionary Configuración
300B:01 Settings.name1 0
0
0000000
000000000
000
0
0000
0000
000
00
0
01234
56789
10111213141516171819
20212223242526272829303132333435
300B:02300B:06300B:08300F:03300F:04300F:08300F:09300F:0A300F:0B300F:0D300F:0F300F:10300F:11300F:13300F:14300F:153014:0E3014:0F3014:103016:01
3016:02
3016:03
3017:02
3017:03301C:06301C:0B
301C:0D301C:0E301C:15301C:18
301D:17301D:1A
3020:023021:013022:01
Settings.name2Commandes.eeprSaveCommands.defaultSettings.l_maxSetting.l_maxStopControl.KPnControl.TNnControl.KPpControl.KFPnStatus.p_difPeakSettings.p_winSettings.p_winTimeSettings.p_maxDif2Commands.SetEncPosControl.pscDampControl.pscDelayCapture.CapLevelCapture.CapStart1Capture.CapStart2RS485.serBaud
RS485.serAdr
RS485.serFormat
CAN.canAddr
CAN.canBaudMotion.invertDirSettings.WarnOvrun
Settings.SignEnableSettings.SignLevelMotion.dec_StopSettings.Flt_pDiff
Motion.v_target0Motion.acc
Commands.del_errI/O.IO_actI/O.IO_def
2
4
3
1
5
35013947 04/2009 73
Configuración de CANopenwww.infoPLC.net
NOTA: Consulte la documentación de cada dispositivo para obtener información acerca de los parámetros generales, la configuración, el ajuste y la depuración.
NOTA: No se envían todos los parámetros cuando el dispositivo toma su configuración. La CPU sólo envía aquellos parámetros que son diferentes de los valores predeterminados.
3 Área Canal Esta área permite seleccionar el canal de comunicación que se va a configurar.Al hacer clic en el dispositivo, se visualizan las fichas siguientes: Descripción: proporciona las características del
dispositivo. CANopen: permite acceder a SDO (en modalidad
online). Objetos de E/S: permite la simbolización previa de los
objetos de entrada/salida. Fallo: sólo se puede acceder en modalidad online.
Al hacer clic en el canal, se visualizan las fichas siguientes: PDO (objetos de entrada/salida) Control de errores Bootup Object Dictionary Configuración Depuración, accesible sólo en modalidad online Diagnóstico (sólo puede accederse en modalidad
online).
4 Área Parámetros generales
Este campo permite seleccionar la función de esclavo.
5 Área Configuración
Esta área se emplea para configurar los canales de los dispositivos.Algunos dispositivos pueden configurarse con una herramienta externa. En este caso, la configuración se almacena en el dispositivo y no es posible introducir parámetros de configuración, ya que este campo está vacío.
Número Elemento Función
74 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
Ficha PDO
Los PDO permiten gestionar el flujo de comunicación entre el maestro CANopen y los esclavos. La ficha PDO permite configurar un PDO.
Esta pantalla se divide en tres partes:
PDO de transmisión: la información se transmite del esclavo al maestro. PDO de recepción: la información se recibe en el esclavo desde el maestro. Variables: variables que pueden asignarse a los PDO. Para asignar una variable
a un PDO, arrastre y suelte la variable en el PDO deseado. No puede asignarse ninguna variable con un PDO estático.
NOTA: Para configurar el STB NCO 1010, es necesario determinar todos los objetos válidos para este dispositivo y configurarlos manualmente en los PDO.
Para obtener información adicional sobre la lista de objetos asociados, consulte el manual del usuario de STB.
Para obtener más información acerca del uso de los PDO, consulte [...].
\3.1\0.0 : (IcIA-IFA.eds)\3.1\0.0 : (IcIA-IFA.eds)
PDO Control de errores Arranque Object Dictionary
PDO Tr.Type Inhibit Time Temporiz... Símbolo
%IW\3.1\0.0.2
%IW\3.1\0.0.6
%IW\3.1\0.0.4
%IW\3.1\0.0.5
Dirección topog. %M..
16#481
COBID
301E.08
301E.07
301E.03
301E.04
Índice
pdo4_drivestat
pdo4_modestat
pdo4_Act8
pdo4_Act32
PDO Tr.Type Inhibit Time Temporiz... Símbolo
%IW\3.1\0.0.0
%IW\3.1\0.0.9
%IW\3.1\0.0.8
%IW\3.1\0.0.7
Direccióntopog. %M.. COBID
301E.06
301E.05
301E.02
301E.01
Índice
pdo4_drivectrl
pdo4_modectrl
pdo4_Ref16
IcIA-IFA CANopen (IcIA-IFA.eds)
Mostrar sólo PDO activoTransmitir (%I)
Mostrar sólo PDO activoRecibir (%Q)
Predeterminado
Función:
Canal 0
IcIA _IFA Configuración
pdo4_Ref32
PDO4(estático) 254 0 0
0PDO4(estático) 254 16#501
16#481
35013947 04/2009 75
Configuración de CANopenwww.infoPLC.net
Ficha Control de errores
La ficha Control de errores para los módulos esclavos CANopen permite configurar la supervisión.
Existen dos opciones posibles:
Heartbeat: el mecanismo de heartbeat consiste en el envío de mensajes de presencia cíclicos generados por un productor de heartbeat. Un transmisor de heartbeat (productor) envía mensajes constantemente. El tiempo de envío se configura con el valor de tiempo del productor de heartbeat de nodo. Uno o varios elementos conectados a la red reciben el mensaje. El consumidor de heartbeat supervisa la recepción de mensajes de heartbeat. El valor predeterminado de tiempo del consumidor se establece en (1,5 * Tiempo de heartbeat del productor). Si su duración excede del Tiempo de heartbeat del consumidor (1,5 * Tiempo de heartbeat del productor), se crea un Evento de heartbeat y se establecen los valores predeterminados del dispositivo.Si se utiliza un PLC maestro M340 en el bus CANopen, todos los nodos que emplean la modalidad de control de heartbeat serán productores. El maestro supervisa la transmisión y la recepción de los mensajes y es el único receptor de los mensajes de heartbeat enviados por los nodos.Unity admite dispositivos que sólo son productores de heartbeat (no consumidores) y no admite la vigilancia de nodo. En este caso, el valor del tiempo de consumidor de heartbeat de nodo se establece en 0. Este valor se visualiza en la ficha de control de errores del dispositivo.El maestro puede enviar mensajes de heartbeat a los esclavos. El tiempo del productor de heartbeat de maestro se establece en 200 ms y no puede modificarse.
Vigilancia de nodo: la vigilancia de nodo es el proceso de supervisión de los nodos de red. El maestro de NMT (Administración de redes) envía una RTR (Petición de transmisión remota) a intervalos regulares (este periodo se denomina Tiempo de vigilancia), y el nodo implicado debe responder en un lapso de tiempo determinado (el Tiempo de vida del nodo es igual al Tiempo de vigilancia multiplicado por el Factor de tiempo de vida).El valor de Tiempo de vida se establece en 2 y no puede modificarse.
NOTA: Algunos dispositivos sólo admiten el heartbeat o bien la vigilancia de nodo. Para los dispositivos que admiten el heartbeat y la vigilancia de nodo, la única posibilidad en Unity Pro es el mecanismo de heartbeat.
76 35013947 04/2009
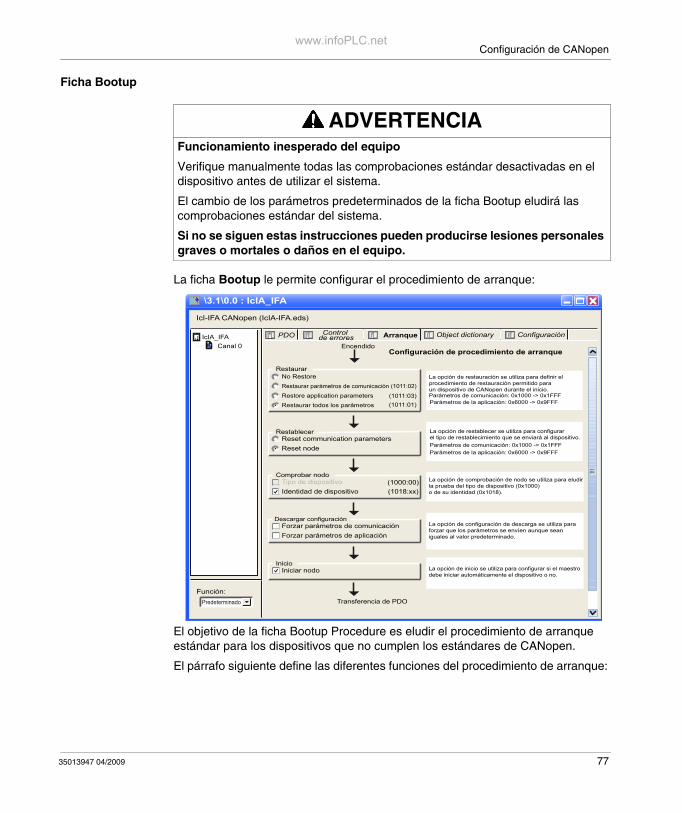
Configuración de CANopenwww.infoPLC.net
Ficha Bootup
La ficha Bootup le permite configurar el procedimiento de arranque:
El objetivo de la ficha Bootup Procedure es eludir el procedimiento de arranque estándar para los dispositivos que no cumplen los estándares de CANopen.
El párrafo siguiente define las diferentes funciones del procedimiento de arranque:
ADVERTENCIAFuncionamiento inesperado del equipo
Verifique manualmente todas las comprobaciones estándar desactivadas en el dispositivo antes de utilizar el sistema.
El cambio de los parámetros predeterminados de la ficha Bootup eludirá las comprobaciones estándar del sistema.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
\3.1\0.0 : IcIA_IFA
IcI-IFA CANopen (IcIA-IFA.eds)
IcIA_IFACanal 0
No RestoreRestaurar
Encendido
Transferencia de PDOFunción:
MASTPredeterminado
Restaurar parámetros de comunicación (1011:02)
Restore application parameters
Restaurar todos los parámetros
RestablecerReset communication parametersReset node
Comprobar nodoTipo de dispositivoIdentidad de dispositivo
Descargar configuraciónForzar parámetros de comunicaciónForzar parámetros de aplicación
InicioIniciar nodo
PDO Arranque
Configuración de procedimiento de arranque
Controlde errores Object dictionary Configuración
(1011:03)(1011:01)
La opción de configuración de descarga se utiliza para forzar que los parámetros se envíen aunque sean iguales al valor predeterminado.
La opción de comprobación de nodo se utiliza para eludirla prueba del tipo de dispositivo (0x1000) o de su identidad (0x1018).
La opción de inicio se utiliza para configurar si el maestrodebe iniciar automáticamente el dispositivo o no.
La opción de restauración se utiliza para definir el procedimiento de restauración permitido para un dispositivo de CANopen durante el inicio.Parámetros de comunicación: 0x1000 -> 0x1FFFParámetros de la aplicación: 0x6000 -> 0x9FFF
La opción de restablecer se utiliza para configurar el tipo de restablecimiento que se enviará al dispositivo.Parámetros de comunicación: 0x1000 -> 0x1FFFParámetros de la aplicación: 0x6000 -> 0x9FFF
(1000:00)(1018:xx)
35013947 04/2009 77
Configuración de CANopenwww.infoPLC.net
Tipo de restauración: No Restore: opción habilitada de forma predeterminada. Restore communication parameters: opción habilitada según el objeto
0x1011sub02. Si la opción está marcada, se restauran todos los parámetros entre 0x1000 y 0x1FFF.
Restore application parameters: opción habilitada según el objeto 0x1011sub03. Si la opción está marcada y el dispositivo implementa correctamente el servicio, se restauran todos los parámetros de aplicación.
Restore all: opción habilitada según el objeto 0x1011sub01. Si la opción está marcada, se restauran todos los parámetros (valor predeterminado).
Tipo de restablecimiento: Reset communication parameters: opción siempre habilitada. Si la opción
está marcada, se restablecen todos los parámetros de comunicación. Reset node (valor predeterminado): opción siempre habilitada. Si la opción
está marcada, se restablecen todos los parámetros.
El tipo y la identidad del dispositivo de comprobación (marcada de forma predeterminada): Si el valor de identificación del tipo de dispositivo para el esclavo en el
diccionario de objetos 0x1F84 no es 0x0000 ("no tener en cuenta"), se compara con el valor real.
Si el ID del proveedor configurado en el diccionario de objetos 0x1F85 no es 0x0000 ("no tener en cuenta"), se lee el índice de esclavo 0x1018, subíndice 1 y se compara con el valor real.
La misma comparación se realiza con ProductCode, RevisionNumber y SerialNumber con los objetos 0x1F86-0x1F88 correspondientes.
NOTA: Si no se marca la opción Device type, se fuerza el diccionario de objetos 0x1F84 a 0x0000.
NOTA: Si no se marca la opción Device identity, se fuerza el diccionario de objetos 0x1F86-0x1F88 (ID de nodo de subdispositivo) a 0x0000.
Fuerza la descarga de parámetros de comunicación o configuración (no marcada de forma predeterminada). Si se marca esta opción, se fuerza la descarga de todos los objetos correspondientes.Si no se marca esta opción, deberá seguir estas normas estándar: Los parámetros se descargan si son diferentes del valor predeterminado. Los parámetros se descargan si se fuerzan en el diccionario de objetos. Los parámetros no se descargan en los demás casos.
Start node: Si la opción está marcada (valor predeterminado), el maestro CANopen inicia automáticamente el dispositivo después del procedimiento de arranque.Si la opción no está marcada, el dispositivo permanece en estado preoperativo después del procedimiento de arranque. En este caso, el dispositivo se debe iniciar mediante el programa de aplicación.
78 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
Ficha Object Dictionary
La ficha Object Dictionary le permite configurar e integrar productos de terceros de la forma siguiente:
Forzar la transmisión de parámetros aunque no se hayan cambiado, al marcar la casilla de verificación asociada de cada parámetro.
Bloquear los parámetros que no deben enviarse al dispositivo, al quitar la marca de la casilla de verificación asociada de cada parámetro.
Establecer objetos en un valor específico justo antes (prólogo) o justo después (epílogo) del procedimiento de arranque estándar.
Modificar el valor actual de un objeto (excepto objetos de sólo lectura), si el cuadro de valor no está sombreado en gris, al escribir el valor deseado en el cuadro. De forma predeterminada, si el valor actual se modifica, el objeto se envía. No obstante, al rellenar el cuadro, todavía tiene la opción de modificar este comportamiento quitando la marca de la casilla de verificación para bloquear el envío del objeto. Para impedir redundancias o conflictos de programación, los parámetros que pueden configurarse en otras fichas, Configuración, PDO o Control de errores, están sombreados en gris en la ficha Object Dictionary.
ADVERTENCIAFuncionamiento inesperado del equipo
Verifique manualmente todos los valores de la ficha Object Dictionary.
Cambiar los valores predeterminados de la tabla Object Dictionary provocará un comportamiento no habitual del equipo.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
35013947 04/2009 79
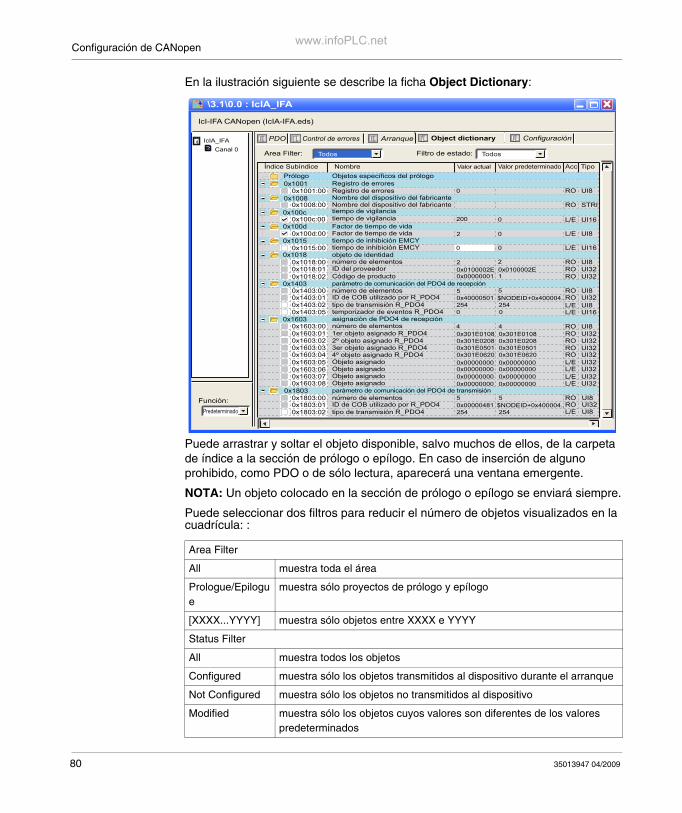
Configuración de CANopenwww.infoPLC.net
En la ilustración siguiente se describe la ficha Object Dictionary:
Puede arrastrar y soltar el objeto disponible, salvo muchos de ellos, de la carpeta de índice a la sección de prólogo o epílogo. En caso de inserción de alguno prohibido, como PDO o de sólo lectura, aparecerá una ventana emergente.
NOTA: Un objeto colocado en la sección de prólogo o epílogo se enviará siempre.
Puede seleccionar dos filtros para reducir el número de objetos visualizados en la cuadrícula: :
Area Filter
All muestra toda el área
Prologue/Epilogue
muestra sólo proyectos de prólogo y epílogo
[XXXX...YYYY] muestra sólo objetos entre XXXX e YYYY
Status Filter
All muestra todos los objetos
Configured muestra sólo los objetos transmitidos al dispositivo durante el arranque
Not Configured muestra sólo los objetos no transmitidos al dispositivo
Modified muestra sólo los objetos cuyos valores son diferentes de los valores predeterminados
\3.1\0.0 : IcIA_IFA
IcI-IFA CANopen (IcIA-IFA.eds)
IcIA_IFACanal 0
Función:MASTPredeterminado
PDO ArranqueControl de errores Object dictionary Configuración
Filtro de estado: MASTTodosArea Filter:
Índice Subíndice Nombre Valor predeterminado Acc TipoValor actual
MASTTodos
Registro de erroresRegistro de errores 0 RO
RORORO
RORO
RORORORORO
RORO
RO
L/E
L/E
L/EL/E
L/EL/EL/EL/E
L/E
UI8UI32UI8
L/E
UI8
UI8UI32UI32
UI8UI32
UI8UI32UI32UI32UI32
STRI
UI16
UI8
UI8UI16
UI32UI32UI32UI32
UI16
0
0
0
2
0 0
4
200
2
2
5
5
254 254
254 254
0x0100002E
0x40000501
0x301E01080x301E02080x301E05010x301E06200x000000000x000000000x000000000x00000000
4
5
0x301E01080x301E02080x301E05010x301E06200x000000000x000000000x000000000x00000000
0x00000481
0x000000010x0100002E1
5
$NODEID+0x400004..
$NODEID+0x400004..
Nombre del dispositivo del fabricanteNombre del dispositivo del fabricante
tiempo de vigilanciatiempo de vigilancia
Factor de tiempo de vidaFactor de tiempo de vidatiempo de inhibición EMCY tiempo de inhibición EMCY objeto de identidadnúmero de elementos
número de elementosID de COB utilizado por R_PDO4tipo de transmisión R_PDO4
número de elementosID de COB utilizado por R_PDO4tipo de transmisión R_PDO4
temporizador de eventos R_PDO4asignación de PDO4 de recepciónnúmero de elementos1er objeto asignado R_PDO4 2º objeto asignado R_PDO4 3er objeto asignado R_PDO4 4º objeto asignado R_PDO4 Objeto asignadoObjeto asignadoObjeto asignadoObjeto asignado
ID del proveedorCódigo de productoparámetro de comunicación del PDO4 de recepción
parámetro de comunicación del PDO4 de transmisión
0x1001
0x1008
0x100c
0x100d
0x1015
0x1018
0x1403
0x1603
0x1803
0x1001:00
0x1008:00
0x100c:00
0x100d:00
0x1015:00
0x1018:000x1018:010x1018:02
0x1403:000x1403:010x1403:020x1403:05
0x1603:000x1603:010x1603:020x1603:030x1603:040x1603:050x1603:060x1603:070x1603:08
0x1803:000x1803:010x1803:02
Prólogo Objetos específicos del prólogo
0
80 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
Puede hacer clic con el botón derecho del ratón en un objeto para ejecutar la función:
NOTA: Algunas funciones sólo están disponibles en la sección de prólogo/epílogo.
Haga clic con el botón derecho del ratón en un objeto en las secciones de prólogo y epílogo
Cut Corta la fila y copia el objeto en el portapapeles
Copy Copia el objeto en el portapapeles
Paste Pega el objeto en la fila seleccionada
Delete Elimina el objeto seleccionado
Move up Se utiliza para gestionar el orden de la lista
Move down Se utiliza para gestionar el orden de la lista
Configured Si se marca, el objeto se transmite al dispositivo
Expand all Expande todos los nodos del árbol
Collapse all Contrae todos los nodos del árbol
Haga clic con el botón derecho del ratón en un objeto en las secciones estándar
Copy Copia el objeto en el portapapeles
Configured Si se marca, el objeto se transmite al dispositivo
Expand all Expande todos los nodos del árbol
Collapse all Contrae todos los nodos del árbol
35013947 04/2009 81
Configuración de CANopenwww.infoPLC.net
Configuración con una herramienta externa: Software de configuración
Presentación
Para configurar un dispositivo Lexium 05/15, IcLA, Tesys U o ATV61/71, es necesario utilizar una herramienta externa:
Software de configuración Advantys para el STB Software PowerSuite V2.5 para Lexium 05 Software Powersuite V2.5 para ATV31, ATV61, ATV71 y Tesys U UNILINK V1.5 para Lexium 15 LP UNILINK V4.0 para Lexium 15 MH EasyIclA V1.104 para ICLA_IFA, ICLA_IFE, ICLA_IFS
NOTA: Con el fin de facilitar la configuración y la programación de dispositivos de unidad y movimiento, es muy recomendable emplear el software junto con los MFB Unity.
NOTA: Puede efectuar un proceso de autoconfiguración con NCO2212, igual que con NCO1010.
Software de configuración Advantys
El software de configuración Advantys (versión 2.5 o superior) debe emplearse para configurar un STB NCO 2212. Este software valida la configuración y crea un archivo DCF que contiene todos los objetos utilizados en la configuración ordenados en la secuencia adecuada. El archivo DCF puede importarse desde Unity Pro.
NOTA: La creación del archivo DCF sólo puede efectuarse desde la versión completa de Advantys.
ADVERTENCIARIESGO DE QUE SE PRODUZCA UN FUNCIONAMIENTO INESPERADO
El archivo de símbolos *.xsy generado por Advantys no se debe utilizar en Unity Pro durante la configuración de una isla STB.
La asignación de entradas y salidas a objetos %MW es distinta.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
82 35013947 04/2009
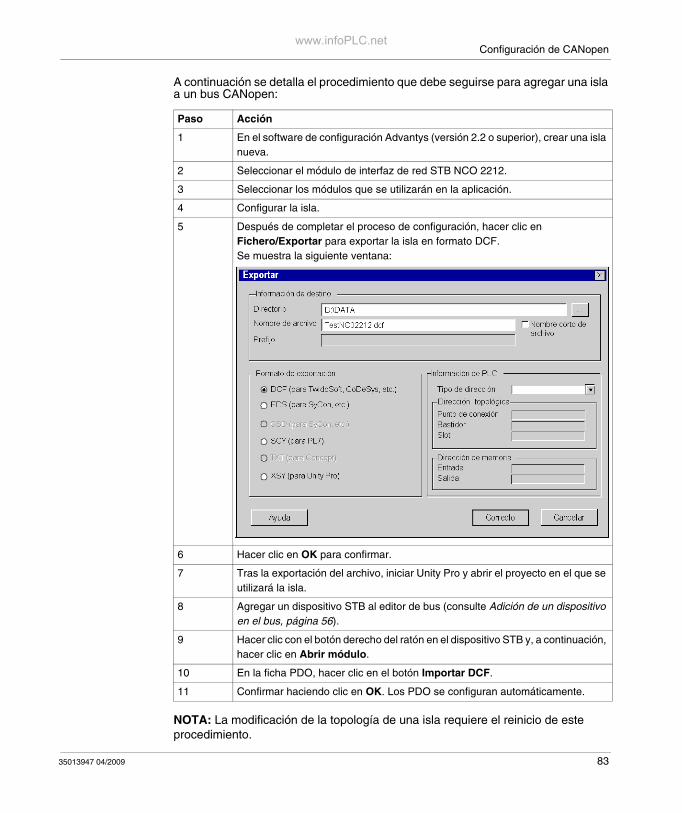
Configuración de CANopenwww.infoPLC.net
A continuación se detalla el procedimiento que debe seguirse para agregar una isla a un bus CANopen:
NOTA: La modificación de la topología de una isla requiere el reinicio de este procedimiento.
Paso Acción
1 En el software de configuración Advantys (versión 2.2 o superior), crear una isla nueva.
2 Seleccionar el módulo de interfaz de red STB NCO 2212.
3 Seleccionar los módulos que se utilizarán en la aplicación.
4 Configurar la isla.
5 Después de completar el proceso de configuración, hacer clic en Fichero/Exportar para exportar la isla en formato DCF.Se muestra la siguiente ventana:
6 Hacer clic en OK para confirmar.
7 Tras la exportación del archivo, iniciar Unity Pro y abrir el proyecto en el que se utilizará la isla.
8 Agregar un dispositivo STB al editor de bus (consulte Adición de un dispositivo en el bus, página 56).
9 Hacer clic con el botón derecho del ratón en el dispositivo STB y, a continuación, hacer clic en Abrir módulo.
10 En la ficha PDO, hacer clic en el botón Importar DCF.
11 Confirmar haciendo clic en OK. Los PDO se configuran automáticamente.
35013947 04/2009 83
Configuración de CANopenwww.infoPLC.net
Para obtener más información sobre la configuración de STB, consulte el manual del usuario de STB.
Software PowerSuite
El software PowerSuite es una herramienta diseñada para implementar las unidades de velocidad Altivar siguientes. Debe emplearse para configurar un dispositivo ATV31/61/71, Tesys U o Lexium 05 (Powersuite 2).
Integra varias funciones que se utilizarán en la implementación de fases como:
Preparaciones de configuraciones Definición de funcionamiento Mantenimiento
La configuración se almacena directamente en el dispositivo.
Si desea obtener más información sobre la configuración de un ATV31/61/71 y un Tesys U mediante el software Powersuite, o sobre la configuración de un Lexium 05 mediante Power Suite 2, consulte el manual del usuario del dispositivo correspondiente.
Software UNILINK
UNILINK proporciona una configuración de parámetros simplificada para servounidades Lexium 05/Lexium15. Se emplea para configurar, definir y ajustar unidades Lexium 15LP/MP/HP de acuerdo con los requisitos de aplicación y de motor sin escobillas SER/BPH asociados.
Para obtener información adicional sobre la configuración de un Lexium 15 mediante UNILINK, consulte el manual del usuario de Lexium.
84 35013947 04/2009
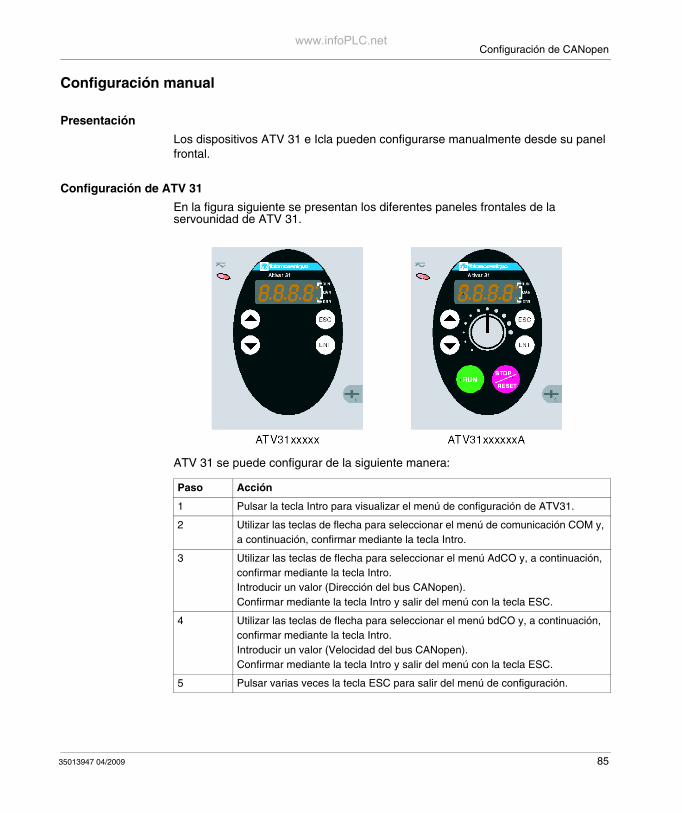
Configuración de CANopenwww.infoPLC.net
Configuración manual
Presentación
Los dispositivos ATV 31 e Icla pueden configurarse manualmente desde su panel frontal.
Configuración de ATV 31
En la figura siguiente se presentan los diferentes paneles frontales de la servounidad de ATV 31.
ATV 31 se puede configurar de la siguiente manera:
Paso Acción
1 Pulsar la tecla Intro para visualizar el menú de configuración de ATV31.
2 Utilizar las teclas de flecha para seleccionar el menú de comunicación COM y, a continuación, confirmar mediante la tecla Intro.
3 Utilizar las teclas de flecha para seleccionar el menú AdCO y, a continuación, confirmar mediante la tecla Intro.Introducir un valor (Dirección del bus CANopen).Confirmar mediante la tecla Intro y salir del menú con la tecla ESC.
4 Utilizar las teclas de flecha para seleccionar el menú bdCO y, a continuación, confirmar mediante la tecla Intro.Introducir un valor (Velocidad del bus CANopen).Confirmar mediante la tecla Intro y salir del menú con la tecla ESC.
5 Pulsar varias veces la tecla ESC para salir del menú de configuración.
35013947 04/2009 85

Configuración de CANopenwww.infoPLC.net
NOTA: La configuración puede modificarse sólo cuando se detiene el motor y el controlador de velocidad variable está bloqueado (cubierta cerrada). Cualquier modificación introducida se aplicará después de un ciclo de Apagado/Encendido del controlador de velocidad.
Para obtener más información sobre la configuración de ATV31, consulte el manual de usuario de unidades de velocidad Altivar.
86 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
4.4 Configuración del maestro
Objeto
En esta sección se detalla la configuración del maestro.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Acceso a la pantalla de configuración del maestro CANopen 88
Pantalla de configuración del maestro CANopen con las CPU 2010/2030 90
Descripción de la pantalla de configuración del maestro para las CPU 2010/2030
92
Pantalla de configuración del maestro CANopen con las CPU 20102/20302 96
Descripción de la pantalla de configuración del maestro para las CPU 20102/20302
98
35013947 04/2009 87
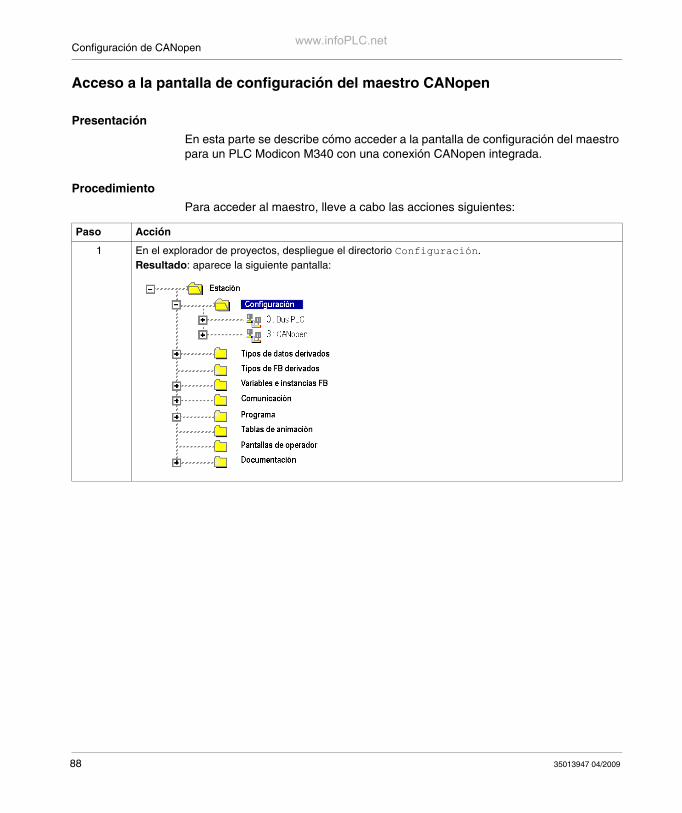
Configuración de CANopenwww.infoPLC.net
Acceso a la pantalla de configuración del maestro CANopen
Presentación
En esta parte se describe cómo acceder a la pantalla de configuración del maestro para un PLC Modicon M340 con una conexión CANopen integrada.
Procedimiento
Para acceder al maestro, lleve a cabo las acciones siguientes:
Paso Acción
1 En el explorador de proyectos, despliegue el directorio Configuración.Resultado: aparece la siguiente pantalla:
88 35013947 04/2009
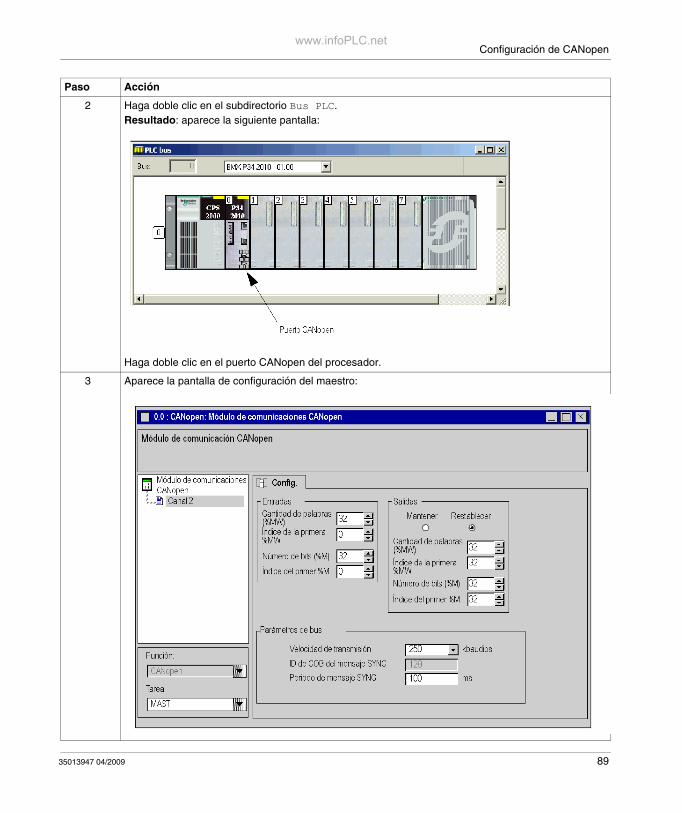
Configuración de CANopenwww.infoPLC.net
2 Haga doble clic en el subdirectorio Bus PLC.Resultado: aparece la siguiente pantalla:
Haga doble clic en el puerto CANopen del procesador.
3 Aparece la pantalla de configuración del maestro:
Paso Acción
35013947 04/2009 89
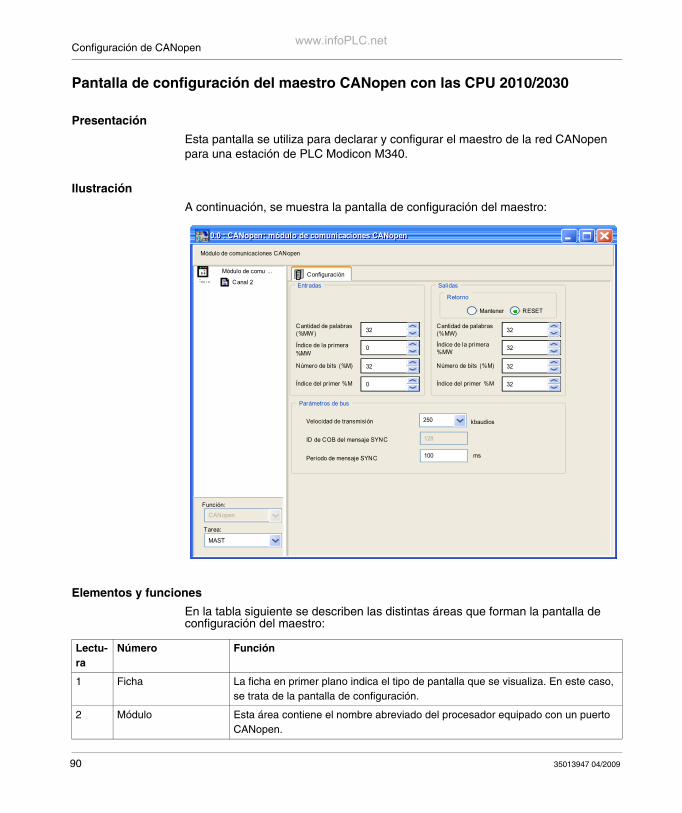
Configuración de CANopenwww.infoPLC.net
Pantalla de configuración del maestro CANopen con las CPU 2010/2030
Presentación
Esta pantalla se utiliza para declarar y configurar el maestro de la red CANopen para una estación de PLC Modicon M340.
Ilustración
A continuación, se muestra la pantalla de configuración del maestro:
Elementos y funciones
En la tabla siguiente se describen las distintas áreas que forman la pantalla de configuración del maestro:
0.0 : CANopen: módulo de comunicaciones CANopen 0.0 : CANopen: módulo de comunicaciones CANopen
Módulo de comunicaciones CANopen
Entradas
32
0
0
32
Cantidad de palabras (%MW )
Índice de la primera %MW
Número de bits (%M)
Índice del primer %M
Salidas
32
32
32
32
Cantidad de palabras (%MW)
Índice de la primera %MW
Número de bits (%M)
Índice del primer %M
Retorno
Mantener RESET
Parámetros de bus
250Velocidad de transmisión
ID de COB del mensaje SYNC
Periodo de mensaje SYNC
128
100
kbaudios
ms
Función:
CANopen
MAST
Tarea:
Módulo de comu ...
Canal 2Configuración
Lectu-ra
Número Función
1 Ficha La ficha en primer plano indica el tipo de pantalla que se visualiza. En este caso, se trata de la pantalla de configuración.
2 Módulo Esta área contiene el nombre abreviado del procesador equipado con un puerto CANopen.
90 35013947 04/2009
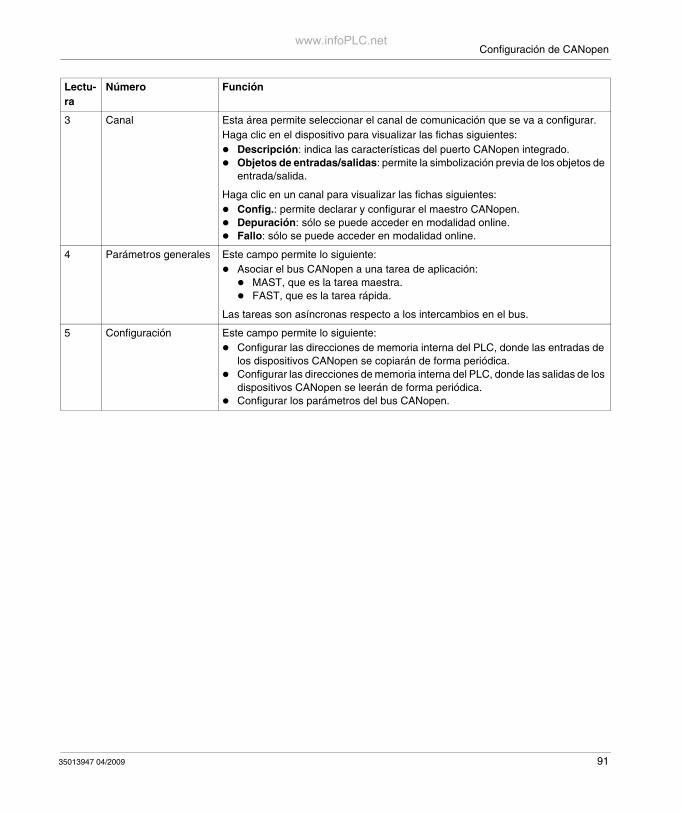
Configuración de CANopenwww.infoPLC.net
3 Canal Esta área permite seleccionar el canal de comunicación que se va a configurar.Haga clic en el dispositivo para visualizar las fichas siguientes: Descripción: indica las características del puerto CANopen integrado. Objetos de entradas/salidas: permite la simbolización previa de los objetos de
entrada/salida.
Haga clic en un canal para visualizar las fichas siguientes: Config.: permite declarar y configurar el maestro CANopen. Depuración: sólo se puede acceder en modalidad online. Fallo: sólo se puede acceder en modalidad online.
4 Parámetros generales Este campo permite lo siguiente: Asociar el bus CANopen a una tarea de aplicación: MAST, que es la tarea maestra. FAST, que es la tarea rápida.
Las tareas son asíncronas respecto a los intercambios en el bus.
5 Configuración Este campo permite lo siguiente: Configurar las direcciones de memoria interna del PLC, donde las entradas de
los dispositivos CANopen se copiarán de forma periódica. Configurar las direcciones de memoria interna del PLC, donde las salidas de los
dispositivos CANopen se leerán de forma periódica. Configurar los parámetros del bus CANopen.
Lectu-ra
Número Función
35013947 04/2009 91
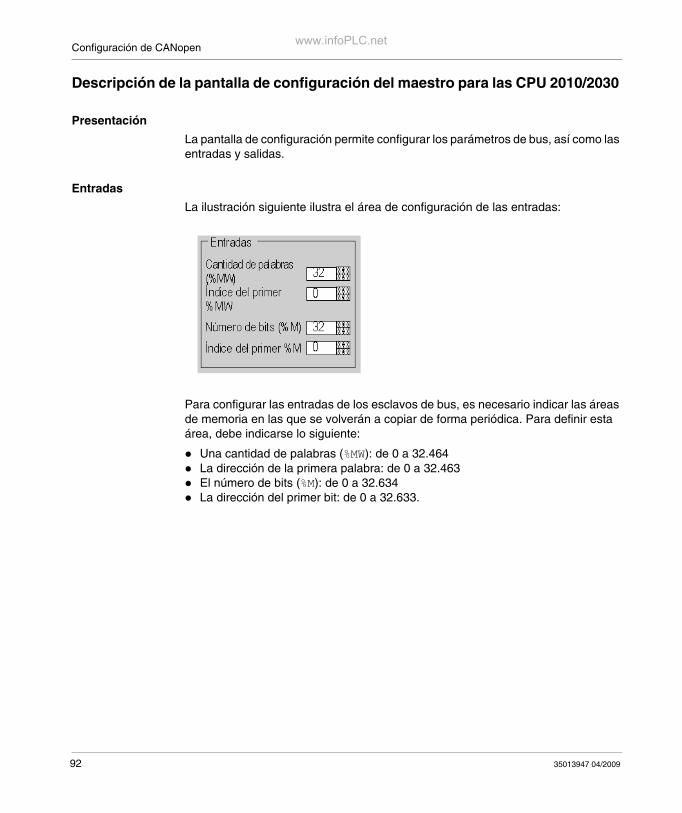
Configuración de CANopenwww.infoPLC.net
Descripción de la pantalla de configuración del maestro para las CPU 2010/2030
Presentación
La pantalla de configuración permite configurar los parámetros de bus, así como las entradas y salidas.
Entradas
La ilustración siguiente ilustra el área de configuración de las entradas:
Para configurar las entradas de los esclavos de bus, es necesario indicar las áreas de memoria en las que se volverán a copiar de forma periódica. Para definir esta área, debe indicarse lo siguiente:
Una cantidad de palabras (%MW): de 0 a 32.464 La dirección de la primera palabra: de 0 a 32.463 El número de bits (%M): de 0 a 32.634 La dirección del primer bit: de 0 a 32.633.
92 35013947 04/2009
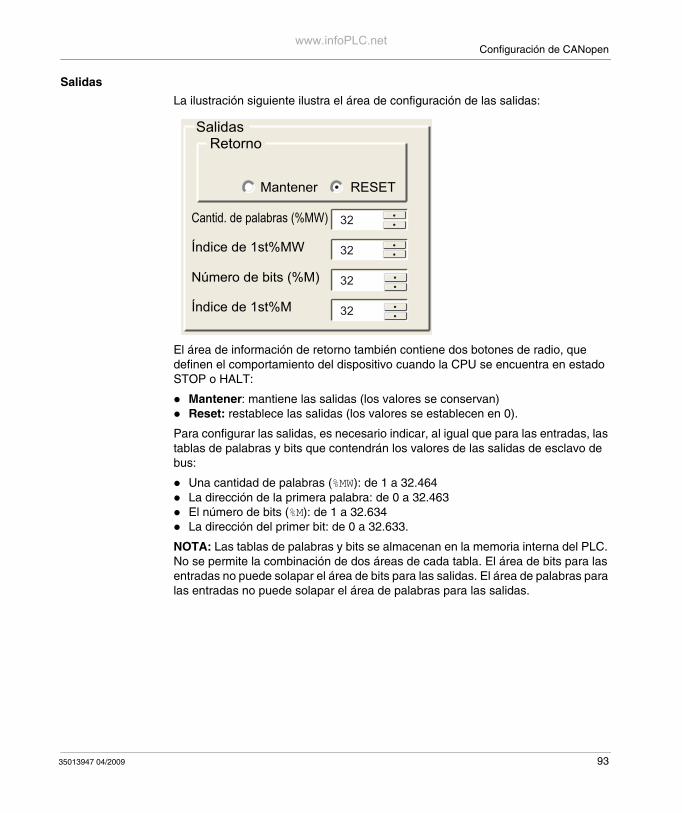
Configuración de CANopenwww.infoPLC.net
Salidas
La ilustración siguiente ilustra el área de configuración de las salidas:
El área de información de retorno también contiene dos botones de radio, que definen el comportamiento del dispositivo cuando la CPU se encuentra en estado STOP o HALT:
Mantener: mantiene las salidas (los valores se conservan) Reset: restablece las salidas (los valores se establecen en 0).
Para configurar las salidas, es necesario indicar, al igual que para las entradas, las tablas de palabras y bits que contendrán los valores de las salidas de esclavo de bus:
Una cantidad de palabras (%MW): de 1 a 32.464 La dirección de la primera palabra: de 0 a 32.463 El número de bits (%M): de 1 a 32.634 La dirección del primer bit: de 0 a 32.633.
NOTA: Las tablas de palabras y bits se almacenan en la memoria interna del PLC. No se permite la combinación de dos áreas de cada tabla. El área de bits para las entradas no puede solapar el área de bits para las salidas. El área de palabras para las entradas no puede solapar el área de palabras para las salidas.
SalidasRetorno
Mantener RESET
Cantid. de palabras (%MW)
Índice de 1st%MW
Índice de 1st%M
Número de bits (%M)
32
32
32
32
35013947 04/2009 93
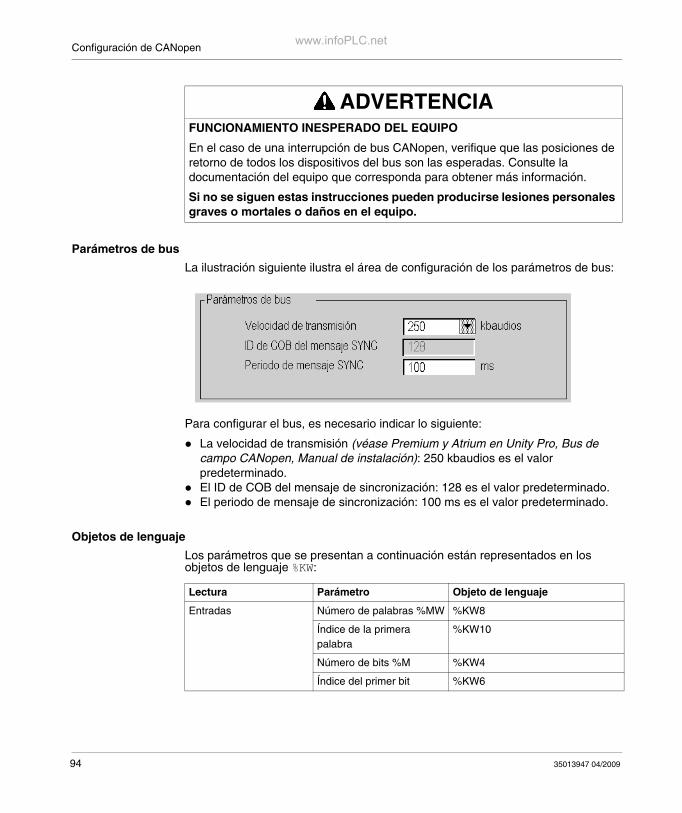
Configuración de CANopenwww.infoPLC.net
Parámetros de bus
La ilustración siguiente ilustra el área de configuración de los parámetros de bus:
Para configurar el bus, es necesario indicar lo siguiente:
La velocidad de transmisión (véase Premium y Atrium en Unity Pro, Bus de campo CANopen, Manual de instalación): 250 kbaudios es el valor predeterminado.
El ID de COB del mensaje de sincronización: 128 es el valor predeterminado. El periodo de mensaje de sincronización: 100 ms es el valor predeterminado.
Objetos de lenguaje
Los parámetros que se presentan a continuación están representados en los objetos de lenguaje %KW:
ADVERTENCIAFUNCIONAMIENTO INESPERADO DEL EQUIPO
En el caso de una interrupción de bus CANopen, verifique que las posiciones de retorno de todos los dispositivos del bus son las esperadas. Consulte la documentación del equipo que corresponda para obtener más información.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
Lectura Parámetro Objeto de lenguaje
Entradas Número de palabras %MW %KW8
Índice de la primera palabra
%KW10
Número de bits %M %KW4
Índice del primer bit %KW6
94 35013947 04/2009
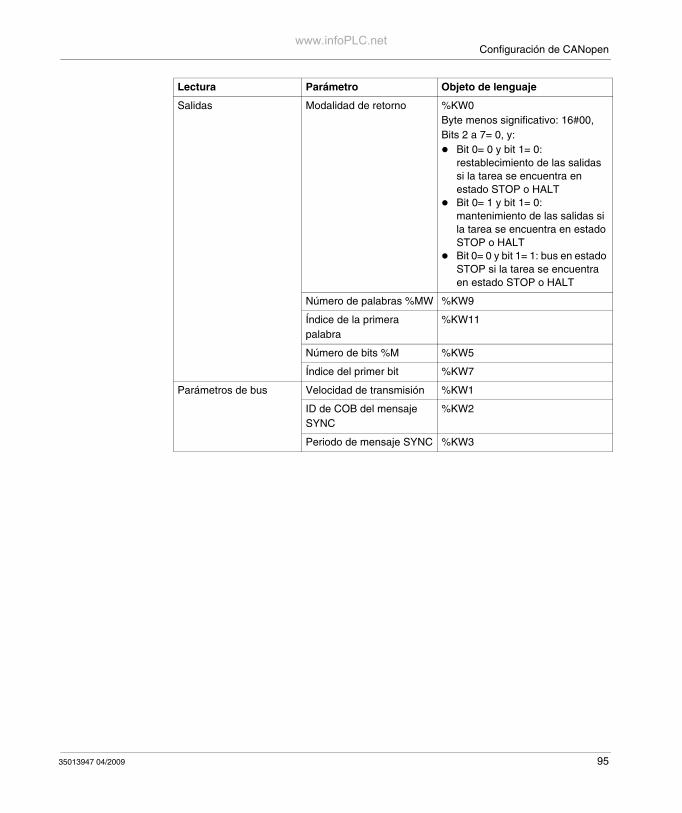
Configuración de CANopenwww.infoPLC.net
Salidas Modalidad de retorno %KW0Byte menos significativo: 16#00, Bits 2 a 7= 0, y: Bit 0= 0 y bit 1= 0:
restablecimiento de las salidas si la tarea se encuentra en estado STOP o HALT
Bit 0= 1 y bit 1= 0: mantenimiento de las salidas si la tarea se encuentra en estado STOP o HALT
Bit 0= 0 y bit 1= 1: bus en estado STOP si la tarea se encuentra en estado STOP o HALT
Número de palabras %MW %KW9
Índice de la primera palabra
%KW11
Número de bits %M %KW5
Índice del primer bit %KW7
Parámetros de bus Velocidad de transmisión %KW1
ID de COB del mensaje SYNC
%KW2
Periodo de mensaje SYNC %KW3
Lectura Parámetro Objeto de lenguaje
35013947 04/2009 95
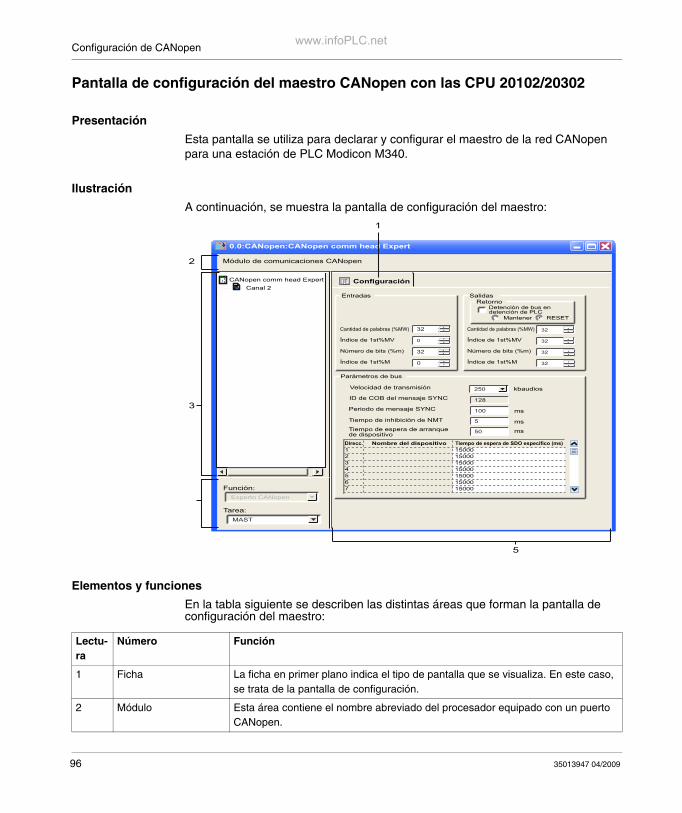
Configuración de CANopenwww.infoPLC.net
Pantalla de configuración del maestro CANopen con las CPU 20102/20302
Presentación
Esta pantalla se utiliza para declarar y configurar el maestro de la red CANopen para una estación de PLC Modicon M340.
Ilustración
A continuación, se muestra la pantalla de configuración del maestro:
Elementos y funciones
En la tabla siguiente se describen las distintas áreas que forman la pantalla de configuración del maestro:
0.0:CANopen:CANopen comm head Expert
Módulo de comunicaciones CANopen
CANopen comm head ExpertCanal 2
SalidasRetorno
Mantener RESET
Detención de bus en detención de PLC
Entradas
Parámetros de bus
kbaudios
ms
ms
ms
Cantidad de palabras (%MW)
Índice de 1st%MV
Índice de 1st%M
Velocidad de transmisión
ID de COB del mensaje SYNC
Periodo de mensaje SYNC
Tiempo de inhibición de NMT
Direcc. Nombre del dispositivo Tiempo de espera de SDO específico (ms)
Tiempo de espera de arranque de dispositivo
150001234567
150001500015000150001500015000Función:
Tarea:
Número de bits (%m)
Cantidad de palabras (%MW)
Índice de 1st%MV
Índice de 1st%M
Número de bits (%m)
MASTMAST
Experto CANopen
250
100
32
32
32
3232
0
32
0
128
5
50
Configuración
1
2
5
3
Lectu-ra
Número Función
1 Ficha La ficha en primer plano indica el tipo de pantalla que se visualiza. En este caso, se trata de la pantalla de configuración.
2 Módulo Esta área contiene el nombre abreviado del procesador equipado con un puerto CANopen.
96 35013947 04/2009
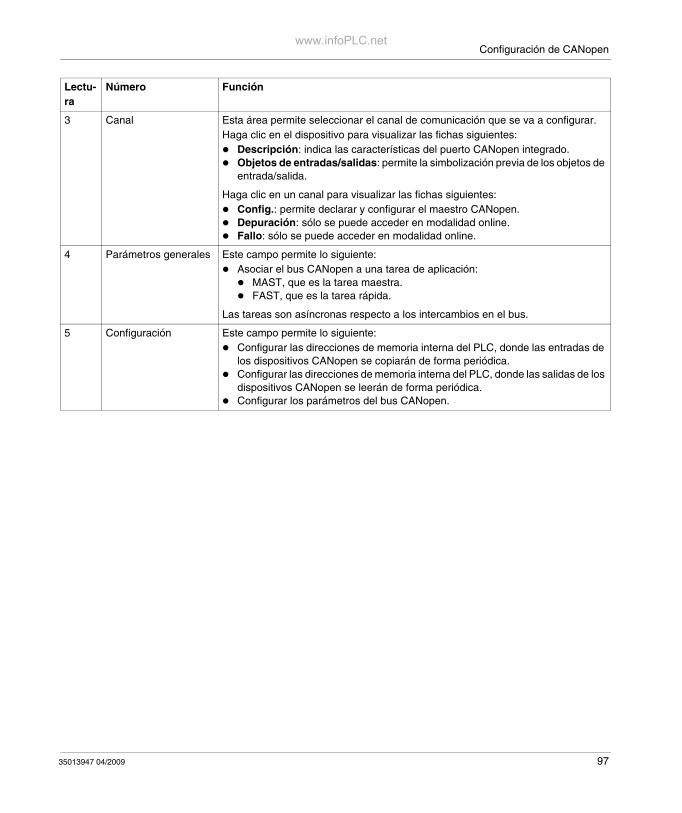
Configuración de CANopenwww.infoPLC.net
3 Canal Esta área permite seleccionar el canal de comunicación que se va a configurar.Haga clic en el dispositivo para visualizar las fichas siguientes: Descripción: indica las características del puerto CANopen integrado. Objetos de entradas/salidas: permite la simbolización previa de los objetos de
entrada/salida.
Haga clic en un canal para visualizar las fichas siguientes: Config.: permite declarar y configurar el maestro CANopen. Depuración: sólo se puede acceder en modalidad online. Fallo: sólo se puede acceder en modalidad online.
4 Parámetros generales Este campo permite lo siguiente: Asociar el bus CANopen a una tarea de aplicación: MAST, que es la tarea maestra. FAST, que es la tarea rápida.
Las tareas son asíncronas respecto a los intercambios en el bus.
5 Configuración Este campo permite lo siguiente: Configurar las direcciones de memoria interna del PLC, donde las entradas de
los dispositivos CANopen se copiarán de forma periódica. Configurar las direcciones de memoria interna del PLC, donde las salidas de los
dispositivos CANopen se leerán de forma periódica. Configurar los parámetros del bus CANopen.
Lectu-ra
Número Función
35013947 04/2009 97
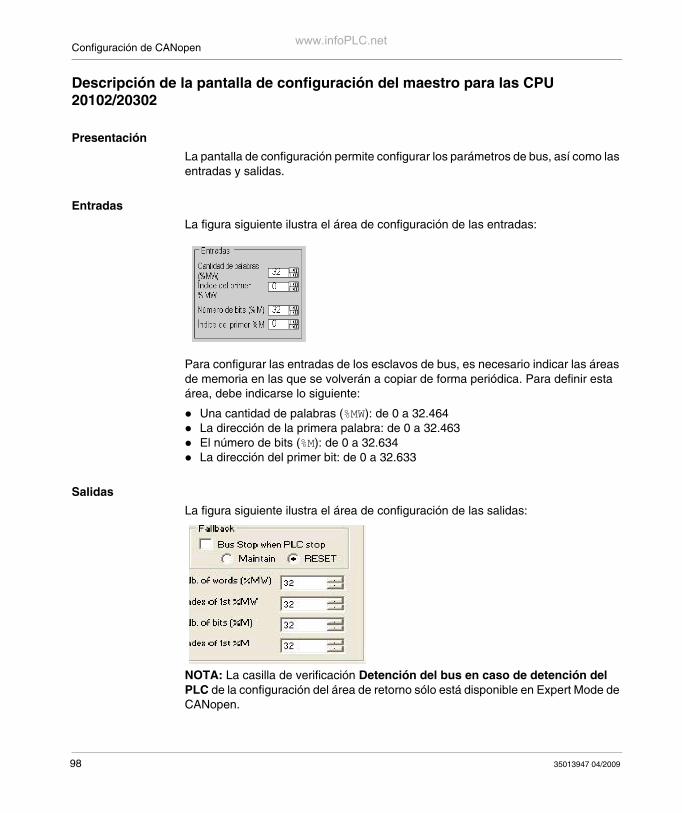
Configuración de CANopenwww.infoPLC.net
Descripción de la pantalla de configuración del maestro para las CPU 20102/20302
Presentación
La pantalla de configuración permite configurar los parámetros de bus, así como las entradas y salidas.
Entradas
La figura siguiente ilustra el área de configuración de las entradas:
Para configurar las entradas de los esclavos de bus, es necesario indicar las áreas de memoria en las que se volverán a copiar de forma periódica. Para definir esta área, debe indicarse lo siguiente:
Una cantidad de palabras (%MW): de 0 a 32.464 La dirección de la primera palabra: de 0 a 32.463 El número de bits (%M): de 0 a 32.634 La dirección del primer bit: de 0 a 32.633
Salidas
La figura siguiente ilustra el área de configuración de las salidas:
NOTA: La casilla de verificación Detención del bus en caso de detención del PLC de la configuración del área de retorno sólo está disponible en Expert Mode de CANopen.
98 35013947 04/2009
Configuración de CANopenwww.infoPLC.net
Si no está marcada: el bus CANopen continúa en la modalidad de ejecución tras una detención del PLC y se aplica la estrategia global de retorno a las salidas en función del botón de radio Mantener o Restablecer.
Si está marcada: el bus CANopen se detiene cuando se detiene un PLC; en este caso, los botones de radio Mantener y Restablecer aparecen sombreados en gris.
El área de información de retorno también contiene dos botones de radio, que definen el comportamiento del dispositivo cuando la CPU se encuentra en estado STOP o HALT:
Mantener: mantiene las salidas (los valores se conservan) Restablecer: restablece las salidas (los valores se establecen en 0)
Para configurar las salidas, es necesario indicar, al igual que para las entradas, las tablas de palabras y bits que contendrán los valores de las salidas de esclavo de bus:
Una cantidad de palabras (%MW): de 1 a 32.464 La dirección de la primera palabra: de 0 a 32.463 El número de bits (%M): de 1 a 32.634 La dirección del primer bit: de 0 a 32.633
NOTA: Las tablas de palabras y bits se almacenan en la memoria interna del PLC. No se permite la combinación de dos áreas de cada tabla. El área de bits para las entradas no puede solapar el área de bits para las salidas. El área de palabras para las entradas no puede solapar el área de palabras para las salidas.
ADVERTENCIAFUNCIONAMIENTO INESPERADO DEL EQUIPO
En el caso de una interrupción de bus CANopen, verifique que las posiciones de retorno de todos los dispositivos del bus son las esperadas. Consulte la documentación del equipo que corresponda para obtener más información.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
35013947 04/2009 99
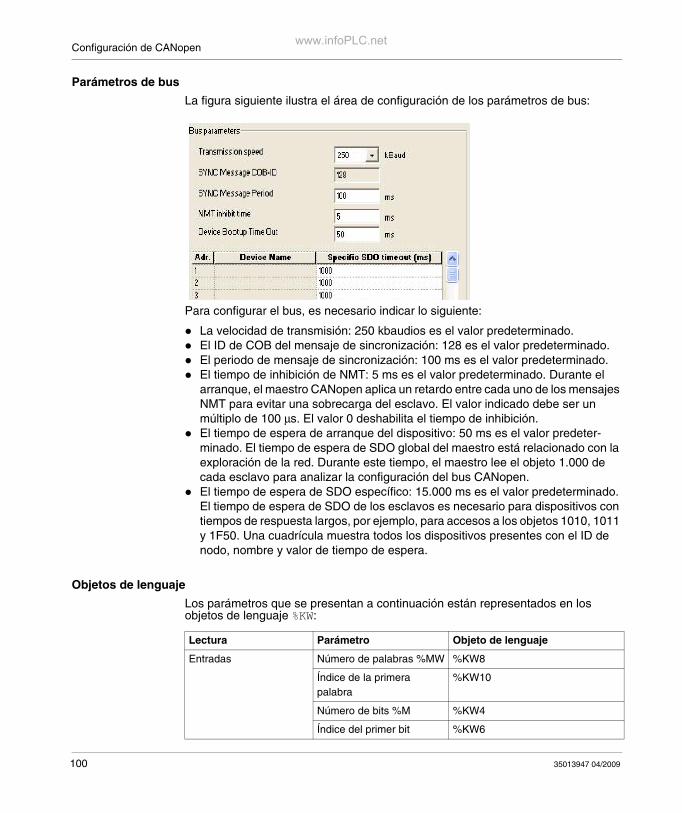
Configuración de CANopenwww.infoPLC.net
Parámetros de bus
La figura siguiente ilustra el área de configuración de los parámetros de bus:
Para configurar el bus, es necesario indicar lo siguiente:
La velocidad de transmisión: 250 kbaudios es el valor predeterminado. El ID de COB del mensaje de sincronización: 128 es el valor predeterminado. El periodo de mensaje de sincronización: 100 ms es el valor predeterminado. El tiempo de inhibición de NMT: 5 ms es el valor predeterminado. Durante el
arranque, el maestro CANopen aplica un retardo entre cada uno de los mensajes NMT para evitar una sobrecarga del esclavo. El valor indicado debe ser un múltiplo de 100 μs. El valor 0 deshabilita el tiempo de inhibición.
El tiempo de espera de arranque del dispositivo: 50 ms es el valor predeter-minado. El tiempo de espera de SDO global del maestro está relacionado con la exploración de la red. Durante este tiempo, el maestro lee el objeto 1.000 de cada esclavo para analizar la configuración del bus CANopen.
El tiempo de espera de SDO específico: 15.000 ms es el valor predeterminado. El tiempo de espera de SDO de los esclavos es necesario para dispositivos con tiempos de respuesta largos, por ejemplo, para accesos a los objetos 1010, 1011 y 1F50. Una cuadrícula muestra todos los dispositivos presentes con el ID de nodo, nombre y valor de tiempo de espera.
Objetos de lenguaje
Los parámetros que se presentan a continuación están representados en los objetos de lenguaje %KW:
Lectura Parámetro Objeto de lenguaje
Entradas Número de palabras %MW %KW8
Índice de la primera palabra
%KW10
Número de bits %M %KW4
Índice del primer bit %KW6
100 35013947 04/2009
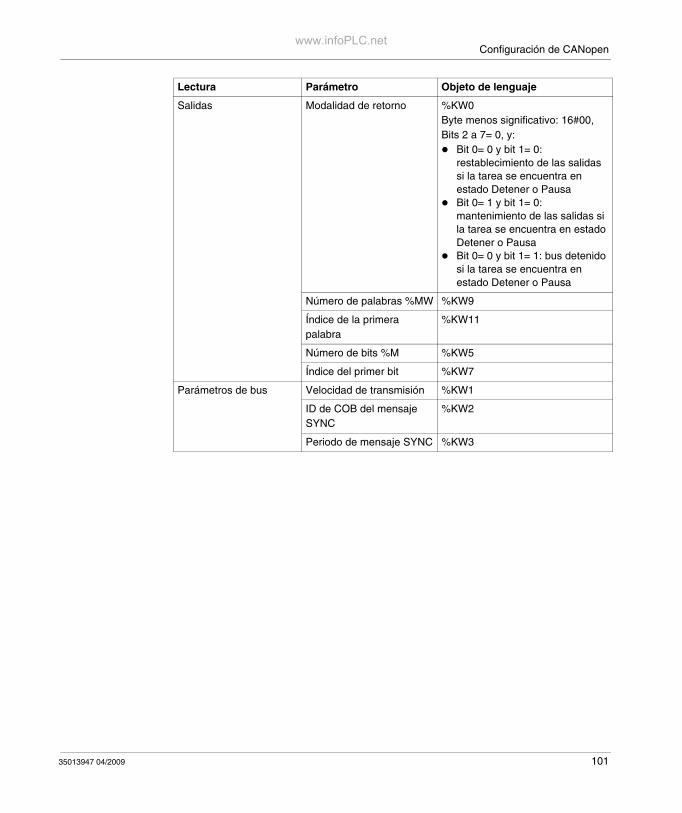
Configuración de CANopenwww.infoPLC.net
Salidas Modalidad de retorno %KW0Byte menos significativo: 16#00, Bits 2 a 7= 0, y: Bit 0= 0 y bit 1= 0:
restablecimiento de las salidas si la tarea se encuentra en estado Detener o Pausa
Bit 0= 1 y bit 1= 0: mantenimiento de las salidas si la tarea se encuentra en estado Detener o Pausa
Bit 0= 0 y bit 1= 1: bus detenido si la tarea se encuentra en estado Detener o Pausa
Número de palabras %MW %KW9
Índice de la primera palabra
%KW11
Número de bits %M %KW5
Índice del primer bit %KW7
Parámetros de bus Velocidad de transmisión %KW1
ID de COB del mensaje SYNC
%KW2
Periodo de mensaje SYNC %KW3
Lectura Parámetro Objeto de lenguaje
35013947 04/2009 101

Configuración de CANopenwww.infoPLC.net
102 35013947 04/2009
35013947 04/2009
5
35013947 04/2009
www.infoPLC.net
Implementación del software Catalog Manager
Objetivo de este capítulo
En este capítulo se describe la implementación del software Catalog Manager.
Contenido de este capítulo
Este capítulo contiene las siguientes secciones:
Sección Apartado Página
5.1 Descripción general de Catalog Manager 104
5.2 Uso de Catalog Manager 112
5.3 Solución de problemas de Catalog Manager 150
103
www.infoPLC.net
5.1 Descripción general de Catalog Manager
Objetivo de esta sección
En esta sección se presenta una descripción general de Catalog Manager
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Descripción de Catalog Manager 105
Contenido de Catalog Manager 108
104 35013947 04/2009
www.infoPLC.net
Descripción de Catalog Manager
Vista general
Catalog Manager es una herramienta de software que permite gestionar los dispositivos CANopen de la base de datos Unity Pro.
Catalog Manager es un software independiente que se puede utilizar para realizar lo siguiente: Integrar productos de terceros Añadir, eliminar y configurar el acceso a dispositivos CANopen en el bus de
campo Reducir el tamaño de la memoria CPU reservada para un determinado equipo Personalizar la interfase de usuario
La interfase de usuario de Unity utiliza una base de datos de catálogo que se instala con Unity Pro, así como algunos servicios básicos de la instalación de Unity Pro. Por lo tanto, el software de Unity Pro debe estar instalado en la estación de trabajo para que Catalog Manager funcione.
NOTA: Está disponible una vista general de Catalog Manager en modo de sólo lectura en Unity Pro mediante Hardware Catalog.
Los dispositivos se añaden en el catálogo estándar de Unity Pro y se pueden utilizar en proyectos como cualquier dispositivo proporcionado con Unity Pro.
35013947 04/2009 105
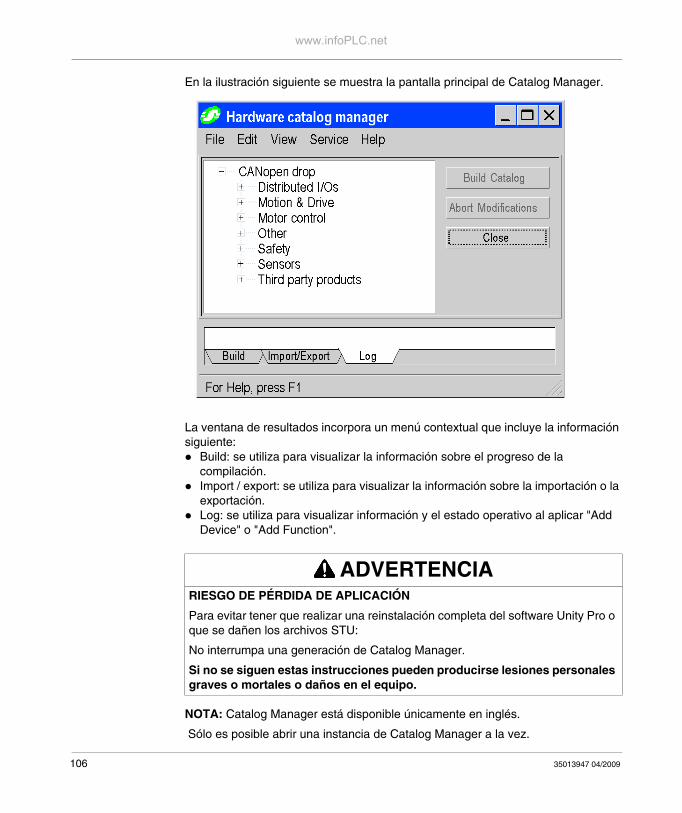
www.infoPLC.net
En la ilustración siguiente se muestra la pantalla principal de Catalog Manager.
La ventana de resultados incorpora un menú contextual que incluye la información siguiente: Build: se utiliza para visualizar la información sobre el progreso de la
compilación. Import / export: se utiliza para visualizar la información sobre la importación o la
exportación. Log: se utiliza para visualizar información y el estado operativo al aplicar "Add
Device" o "Add Function".
NOTA: Catalog Manager está disponible únicamente en inglés.
Sólo es posible abrir una instancia de Catalog Manager a la vez.
ADVERTENCIARIESGO DE PÉRDIDA DE APLICACIÓN
Para evitar tener que realizar una reinstalación completa del software Unity Pro o que se dañen los archivos STU:
No interrumpa una generación de Catalog Manager.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
106 35013947 04/2009
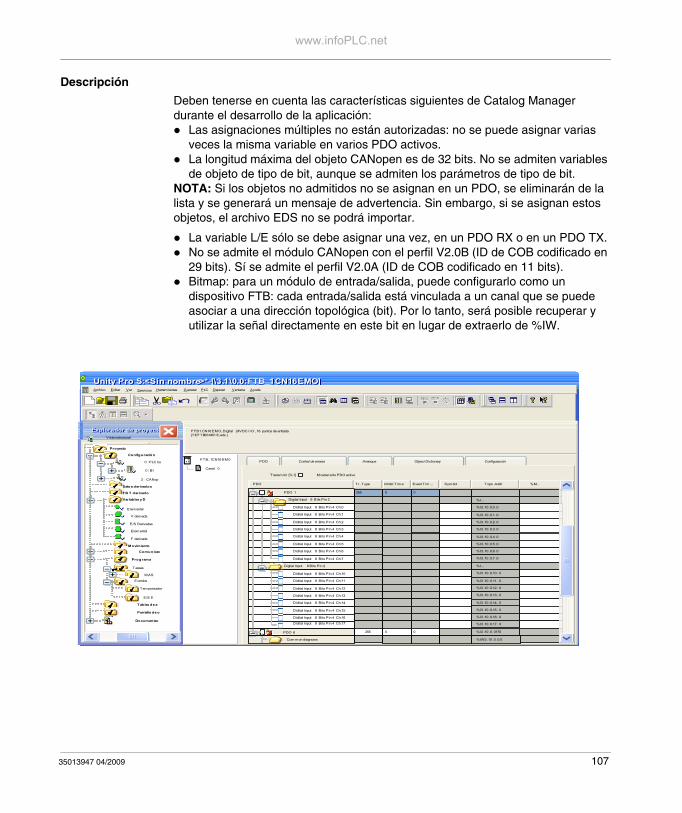
www.infoPLC.net
Descripción
Deben tenerse en cuenta las características siguientes de Catalog Manager durante el desarrollo de la aplicación: Las asignaciones múltiples no están autorizadas: no se puede asignar varias
veces la misma variable en varios PDO activos. La longitud máxima del objeto CANopen es de 32 bits. No se admiten variables
de objeto de tipo de bit, aunque se admiten los parámetros de tipo de bit.NOTA: Si los objetos no admitidos no se asignan en un PDO, se eliminarán de la lista y se generará un mensaje de advertencia. Sin embargo, si se asignan estos objetos, el archivo EDS no se podrá importar.
La variable L/E sólo se debe asignar una vez, en un PDO RX o en un PDO TX. No se admite el módulo CANopen con el perfil V2.0B (ID de COB codificado en
29 bits). Sí se admite el perfil V2.0A (ID de COB codificado en 11 bits). Bitmap: para un módulo de entrada/salida, puede configurarlo como un
dispositivo FTB: cada entrada/salida está vinculada a un canal que se puede asociar a una dirección topológica (bit). Por lo tanto, será posible recuperar y utilizar la señal directamente en este bit en lugar de extraerlo de %IW.
Unity Pro S:<Sin nombre>*-[\3.1\0.0:FTB_1CN16EMO]Unity Pro S:<Sin nombre>*-[\3.1\0.0:FTB_1CN16EMO]
Explorador de proyectosExplorador de proyectosVista estructural
Ver Servicios Herram ientas G enerarArchivo Editar PLC Depurar Ventana Ayuda
Proyecto
Configuración
0 :PLC bu
0 : Bl
3 : CANop
Datos derivados
FB T derivado
Variables y D
Elem ental
V derivada
E/S Derivadas
F derivada
Elem ental
M ovimiento
Comunicac
Programa
Tareas
M AS
Eventos
Tem porizador
E/S E
Tablas de a
Pantalla de o
Documentac
Didital Input 8 Bits Pin 4 Ch:0
Didital Input 8 Bits Pin 4 Ch:1
Didital Input 8 Bits Pin 4 Ch:2
Didital Input 8 Bits Pin 4 Ch:3
Didital Input 8 Bits Pin 4 Ch:4
Didital Input 8 Bits Pin 4 Ch:5
Didital Input 8 Bits Pin 4 Ch:6
Didital Input 8 Bits Pin 4 Ch:7
Didital Input 8 Bits Pin 4 Ch:10
Didital Input 8 Bits Pin 4 Ch:11
Didital Input 8 Bits Pin 4 Ch:12
Didital Input 8 Bits Pin 4 Ch:13
Didital Input 8 Bits Pin 4 Ch:14
Didital Input 8 Bits Pin 4 Ch:15
Didital Input 8 Bits Pin 4 Ch:16
Didital Input 8 Bits Pin 4 Ch:17
255
255
0
0
0
0
%I...
%I3. 10 .0.0 .0
%I3. 10 .0.1 .0
%I3. 10 .0.2 .0
%I3. 10 .0.3 .0
%I3. 10 .0.4 .0
%I3. 10 .0.5 .0
%I3. 10 .0.6 .0
%I3. 10 .0.7 .0
%I...
%I3 .10 .0.10 . 0
%I3 .10 .0.11 . 0
%I3 .10 .0.12 . 0
%I3 .10 .0.13 . 0
%I3 .10 .0.14 . 0
%I3 .10 .0.15 . 0
%I3 .10 .0.16 . 0
%I3 .10 .0.17 . 0
%I3 .10 .0. 0170
%IW3 .10 .0 .0.0
PDO
Digital Input 8 Bits Pin 2
Digital Input 8 Bits Pin 2
PDO 1
Tr . Type Inhibit T im e Event T im ... Sym bol Topo .Addr %M...
Transmitir [%1] M ostrar sólo PDO activo
PDO Control de errores Arranque Configuración Object Dictionary
PDO 6
Com m on diagnosis
FTB 1 CN16 EMO, Digital 24VDC I /O , 16 puntos de entrada [TEFTB03 M01 E,eds ]
FTB_ 1CN16 EM 0
Canal 0
35013947 04/2009 107
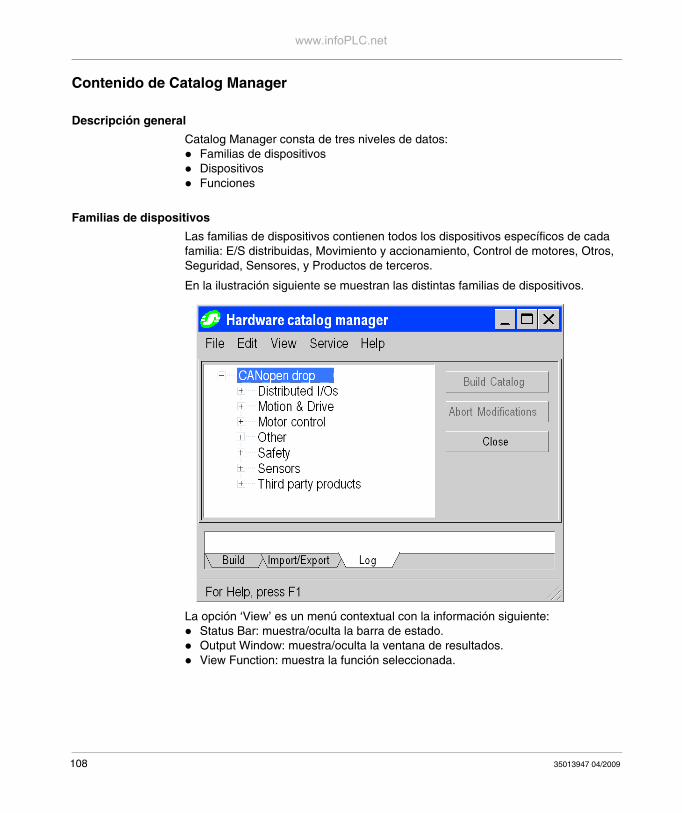
www.infoPLC.net
Contenido de Catalog Manager
Descripción general
Catalog Manager consta de tres niveles de datos: Familias de dispositivos Dispositivos Funciones
Familias de dispositivos
Las familias de dispositivos contienen todos los dispositivos específicos de cada familia: E/S distribuidas, Movimiento y accionamiento, Control de motores, Otros, Seguridad, Sensores, y Productos de terceros.
En la ilustración siguiente se muestran las distintas familias de dispositivos.
La opción ‘View’ es un menú contextual con la información siguiente: Status Bar: muestra/oculta la barra de estado. Output Window: muestra/oculta la ventana de resultados. View Function: muestra la función seleccionada.
108 35013947 04/2009
www.infoPLC.net
Dispositivos
Los dispositivos son unidades externas independientes que pueden ofrecer una o varias funciones distintas.
Un dispositivo se identifica en el catálogo por su nombre. El nombre predeterminado se obtiene del archivo EDS, pero es posible modificarlo. El nombre de dispositivo debe ser exclusivo en el catálogo.
Existen dos tipos distintos de dispositivos: Dispositivos programados previamente
En el software Unity Pro se incluye información sobre estos dispositivos.El usuario no puede modificar la lista de dispositivos programados previamente. Se muestra un icono con el logotipo de Schneider a la izquierda del nombre de dispositivo Schneider.
Dispositivos de usuarioCualquier dispositivo que no se incluya en la oferta de Schneider se considera un "dispositivo de usuario".Los dispositivos de usuario se pueden eliminar o reconfigurar en Catalog Manager. Los dispositivos de usuario que se han añadido pero que aún no se
han creado se muestran con el icono . Los dispositivos que se han creado se
indican con el icono .
35013947 04/2009 109
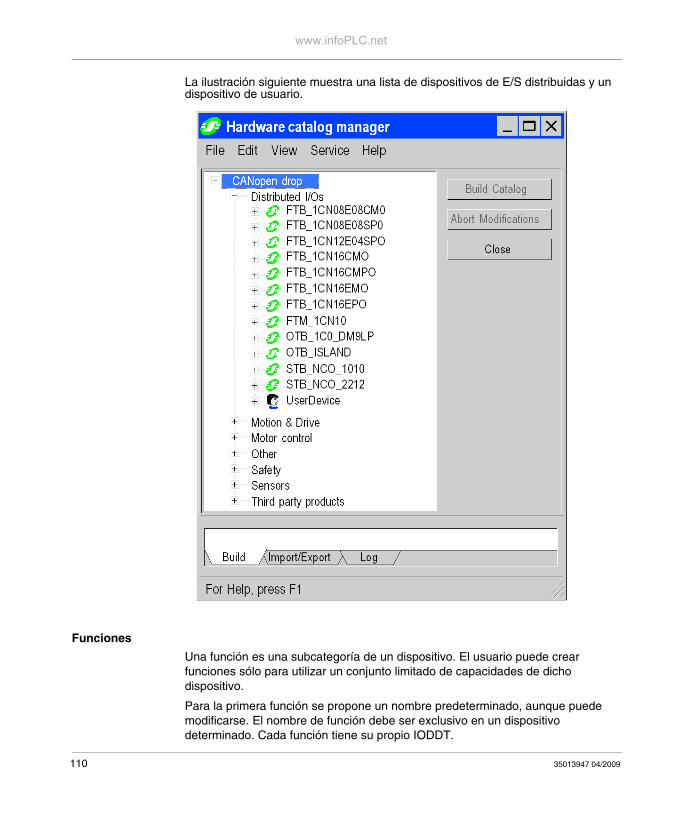
www.infoPLC.net
La ilustración siguiente muestra una lista de dispositivos de E/S distribuidas y un dispositivo de usuario.
Funciones
Una función es una subcategoría de un dispositivo. El usuario puede crear funciones sólo para utilizar un conjunto limitado de capacidades de dicho dispositivo.
Para la primera función se propone un nombre predeterminado, aunque puede modificarse. El nombre de función debe ser exclusivo en un dispositivo determinado. Cada función tiene su propio IODDT.
110 35013947 04/2009
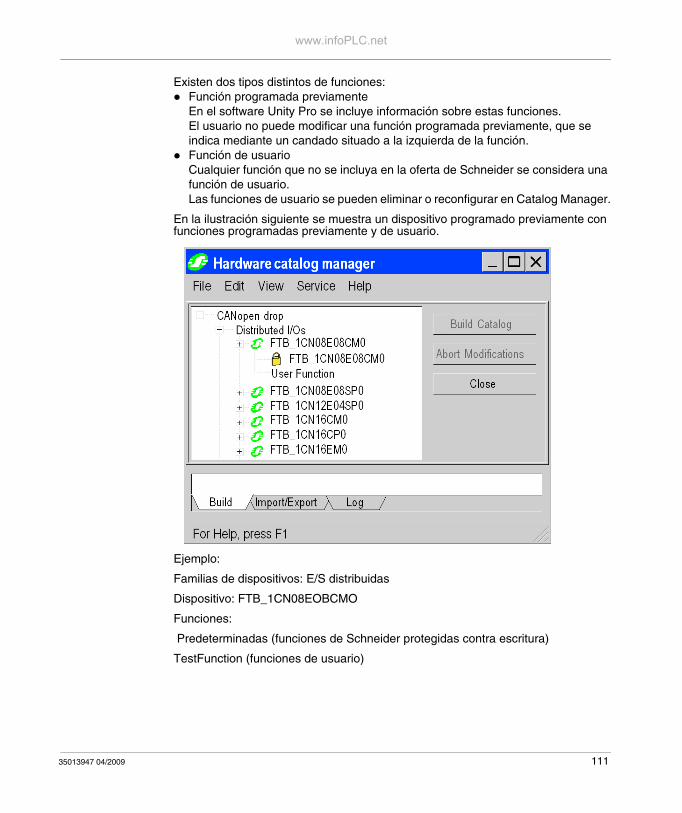
www.infoPLC.net
Existen dos tipos distintos de funciones: Función programada previamente
En el software Unity Pro se incluye información sobre estas funciones.El usuario no puede modificar una función programada previamente, que se indica mediante un candado situado a la izquierda de la función.
Función de usuarioCualquier función que no se incluya en la oferta de Schneider se considera una función de usuario.Las funciones de usuario se pueden eliminar o reconfigurar en Catalog Manager.
En la ilustración siguiente se muestra un dispositivo programado previamente con funciones programadas previamente y de usuario.
Ejemplo:
Familias de dispositivos: E/S distribuidas
Dispositivo: FTB_1CN08EOBCMO
Funciones:
Predeterminadas (funciones de Schneider protegidas contra escritura)
TestFunction (funciones de usuario)
35013947 04/2009 111
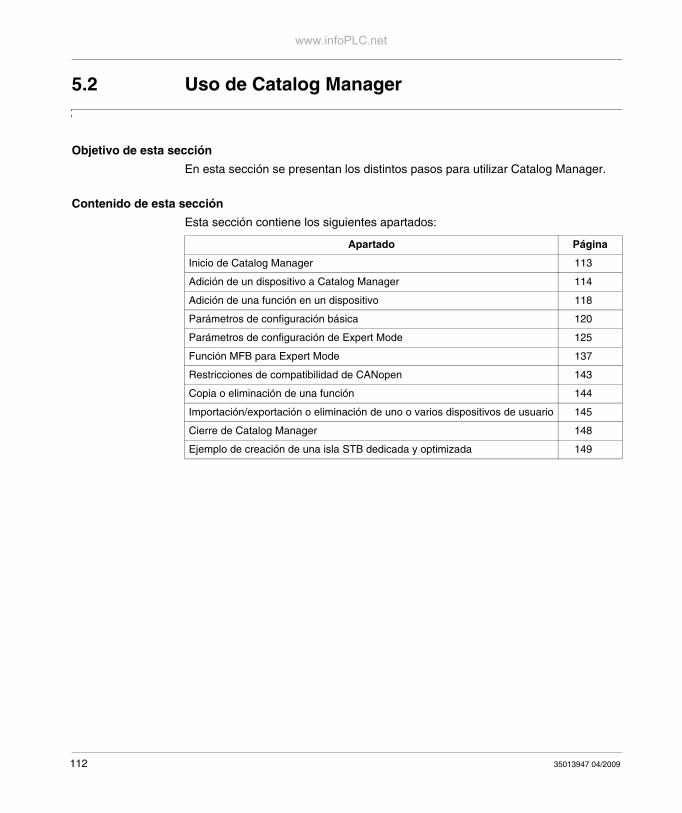
www.infoPLC.net
5.2 Uso de Catalog Manager
Objetivo de esta sección
En esta sección se presentan los distintos pasos para utilizar Catalog Manager.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Inicio de Catalog Manager 113
Adición de un dispositivo a Catalog Manager 114
Adición de una función en un dispositivo 118
Parámetros de configuración básica 120
Parámetros de configuración de Expert Mode 125
Función MFB para Expert Mode 137
Restricciones de compatibilidad de CANopen 143
Copia o eliminación de una función 144
Importación/exportación o eliminación de uno o varios dispositivos de usuario 145
Cierre de Catalog Manager 148
Ejemplo de creación de una isla STB dedicada y optimizada 149
112 35013947 04/2009
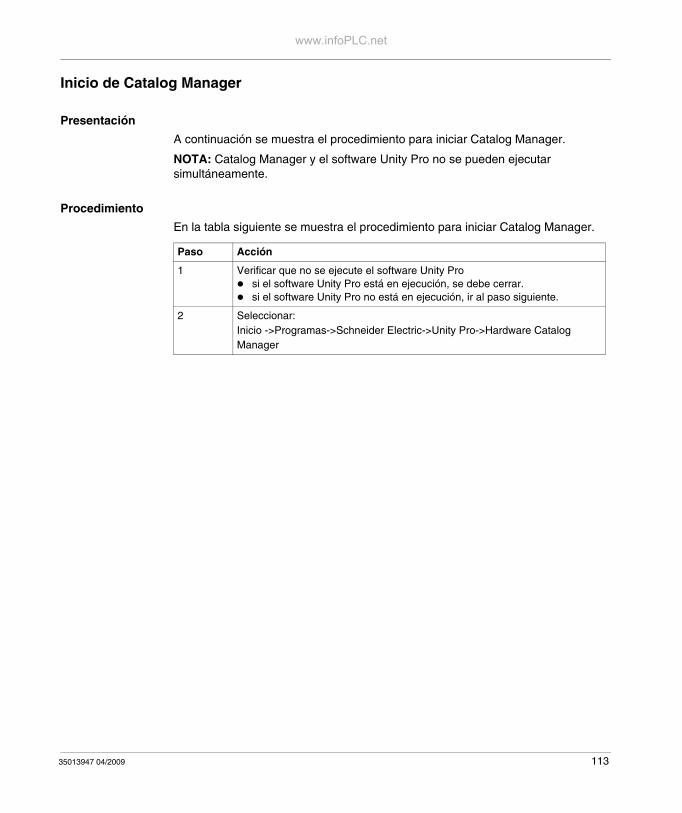
www.infoPLC.net
Inicio de Catalog Manager
Presentación
A continuación se muestra el procedimiento para iniciar Catalog Manager.
NOTA: Catalog Manager y el software Unity Pro no se pueden ejecutar simultáneamente.
Procedimiento
En la tabla siguiente se muestra el procedimiento para iniciar Catalog Manager.
Paso Acción
1 Verificar que no se ejecute el software Unity Pro si el software Unity Pro está en ejecución, se debe cerrar. si el software Unity Pro no está en ejecución, ir al paso siguiente.
2 Seleccionar: Inicio ->Programas->Schneider Electric->Unity Pro->Hardware Catalog Manager
35013947 04/2009 113
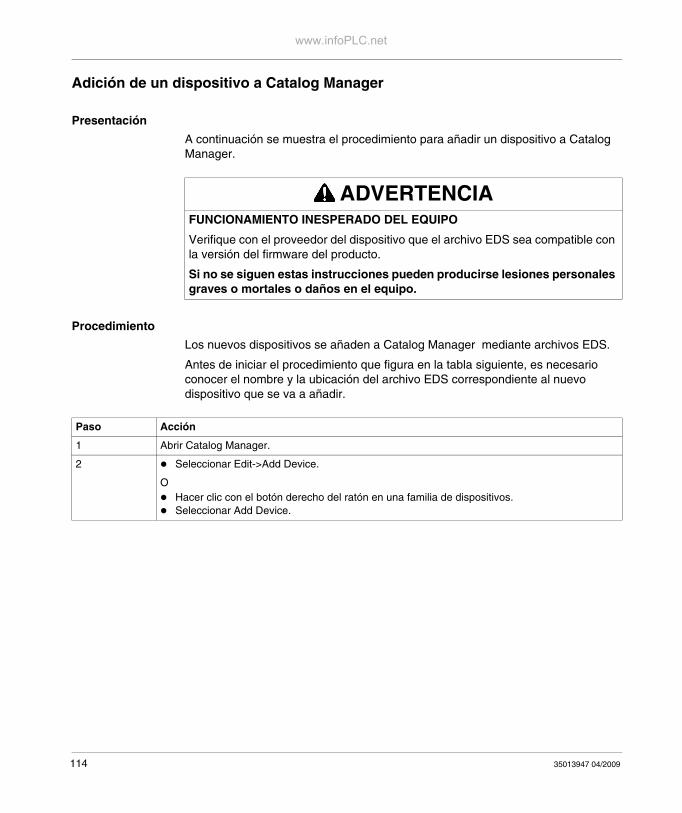
www.infoPLC.net
Adición de un dispositivo a Catalog Manager
Presentación
A continuación se muestra el procedimiento para añadir un dispositivo a Catalog Manager.
Procedimiento
Los nuevos dispositivos se añaden a Catalog Manager mediante archivos EDS.
Antes de iniciar el procedimiento que figura en la tabla siguiente, es necesario conocer el nombre y la ubicación del archivo EDS correspondiente al nuevo dispositivo que se va a añadir.
ADVERTENCIAFUNCIONAMIENTO INESPERADO DEL EQUIPO
Verifique con el proveedor del dispositivo que el archivo EDS sea compatible con la versión del firmware del producto.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
Paso Acción
1 Abrir Catalog Manager.
2 Seleccionar Edit->Add Device.
O Hacer clic con el botón derecho del ratón en una familia de dispositivos. Seleccionar Add Device.
114 35013947 04/2009
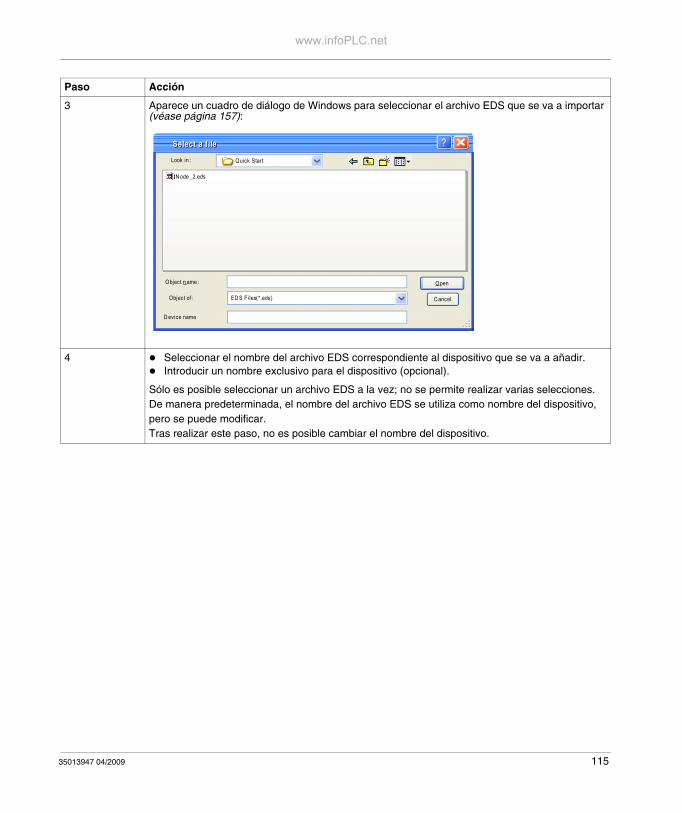
www.infoPLC.net
3 Aparece un cuadro de diálogo de Windows para seleccionar el archivo EDS que se va a importar (véase página 157):
4 Seleccionar el nombre del archivo EDS correspondiente al dispositivo que se va a añadir. Introducir un nombre exclusivo para el dispositivo (opcional).
Sólo es posible seleccionar un archivo EDS a la vez; no se permite realizar varias selecciones.De manera predeterminada, el nombre del archivo EDS se utiliza como nombre del dispositivo, pero se puede modificar.Tras realizar este paso, no es posible cambiar el nombre del dispositivo.
Paso Acción
Select a fileSelect a file ?
Quick Star t
Cancel
OpenObject n ame :
Object of :
D evice name
EDS Files(*.eds)
Look in :
Node _2.eds
35013947 04/2009 115
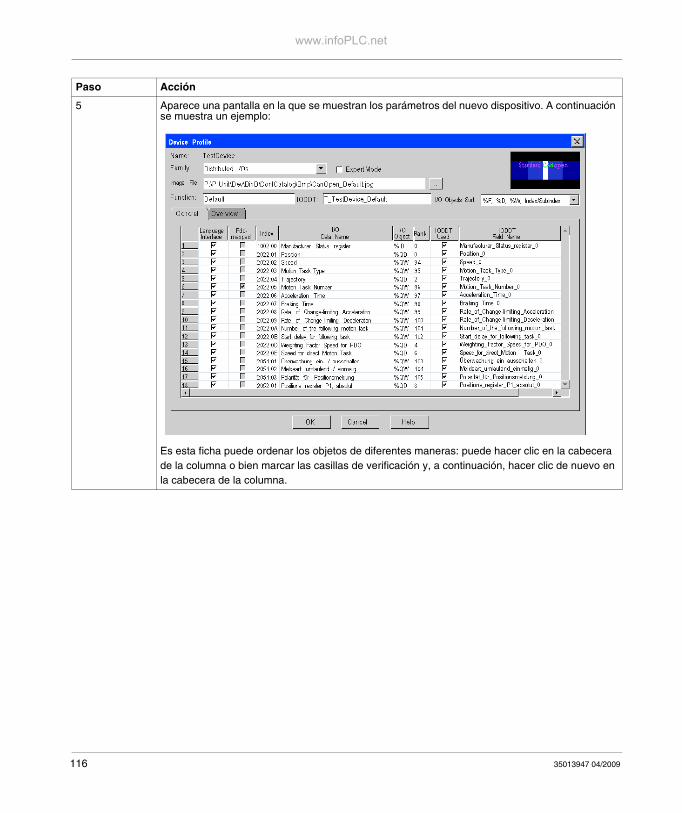
www.infoPLC.net
5 Aparece una pantalla en la que se muestran los parámetros del nuevo dispositivo. A continuación se muestra un ejemplo:
Es esta ficha puede ordenar los objetos de diferentes maneras: puede hacer clic en la cabecera de la columna o bien marcar las casillas de verificación y, a continuación, hacer clic de nuevo en la cabecera de la columna.
Paso Acción
116 35013947 04/2009
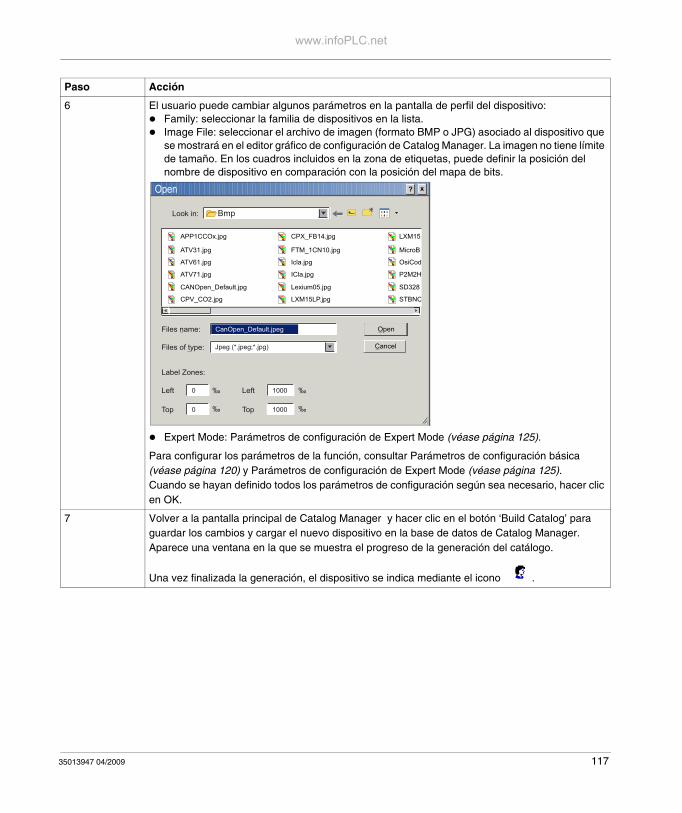
www.infoPLC.net
6 El usuario puede cambiar algunos parámetros en la pantalla de perfil del dispositivo: Family: seleccionar la familia de dispositivos en la lista. Image File: seleccionar el archivo de imagen (formato BMP o JPG) asociado al dispositivo que
se mostrará en el editor gráfico de configuración de Catalog Manager. La imagen no tiene límite de tamaño. En los cuadros incluidos en la zona de etiquetas, puede definir la posición del nombre de dispositivo en comparación con la posición del mapa de bits.
Expert Mode: Parámetros de configuración de Expert Mode (véase página 125).
Para configurar los parámetros de la función, consultar Parámetros de configuración básica (véase página 120) y Parámetros de configuración de Expert Mode (véase página 125).Cuando se hayan definido todos los parámetros de configuración según sea necesario, hacer clic en OK.
7 Volver a la pantalla principal de Catalog Manager y hacer clic en el botón ‘Build Catalog’ para guardar los cambios y cargar el nuevo dispositivo en la base de datos de Catalog Manager. Aparece una ventana en la que se muestra el progreso de la generación del catálogo.
Una vez finalizada la generación, el dispositivo se indica mediante el icono .
Paso Acción
Open
Open
Cancel
x?
BmpLook in:
Jpeg (*.jpeg;*.jpg)Files of type:
Label Zones:
Files name: CanOpen_Default.jpeg
Left ‰
‰
‰
‰
0
Top 0
Left 1000
Top 1000
APP1CCOx.jpg
ATV31.jpg
ATV61.jpg
ATV71.jpg
CANOpen_Default.jpg
CPV_CO2.jpg
CPX_FB14.jpg
FTM_1CN10.jpg
Icla.jpg
ICla.jpg
Lexium05.jpg
LXM15LP.jpg
LXM15
MicroB
OsiCod
P2M2H
SD328
STBNC
35013947 04/2009 117
www.infoPLC.net
Adición de una función en un dispositivo
Presentación
En este procedimiento se describe cómo añadir una función a un dispositivo existente en Catalog Manager. La adición de una función en un dispositivo permite que el usuario acceda a un subconjunto limitado de funciones del dispositivo.
Procedimiento
En la tabla siguiente se muestra el procedimiento para añadir una función y acceder a la pantalla de configuración:
Paso Acción
1 Abrir Catalog Manager.
2 Existen dos modos distintos para acceder a la pantalla de configuración: Hacer clic con el botón derecho del ratón en un dispositivo.
Seleccionar ‘Add Function".O
Seleccionar un dispositivo en Catalog Manager.Seleccionar Edit->Add Function.
118 35013947 04/2009
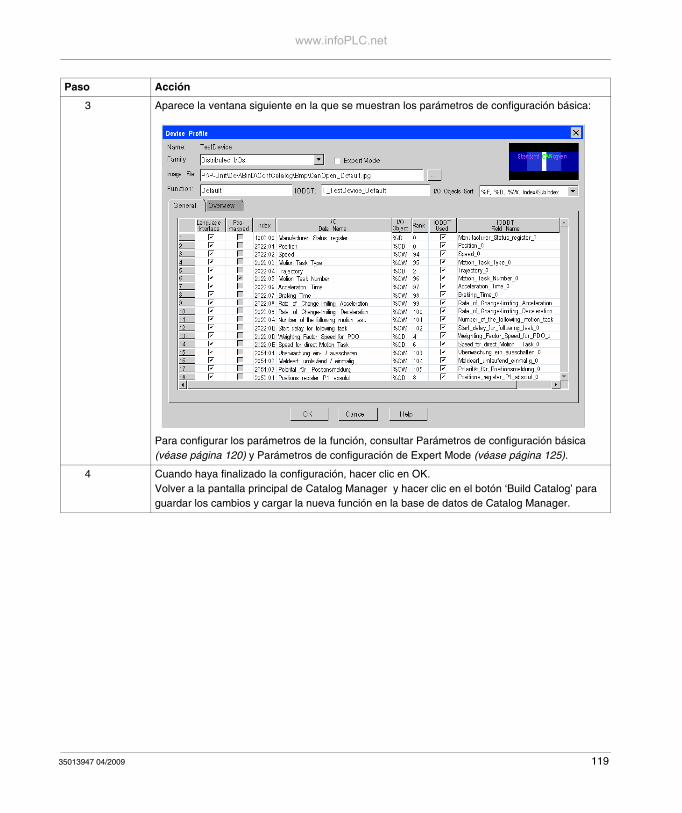
www.infoPLC.net
3 Aparece la ventana siguiente en la que se muestran los parámetros de configuración básica:
Para configurar los parámetros de la función, consultar Parámetros de configuración básica (véase página 120) y Parámetros de configuración de Expert Mode (véase página 125).
4 Cuando haya finalizado la configuración, hacer clic en OK.Volver a la pantalla principal de Catalog Manager y hacer clic en el botón ‘Build Catalog’ para guardar los cambios y cargar la nueva función en la base de datos de Catalog Manager.
Paso Acción
35013947 04/2009 119
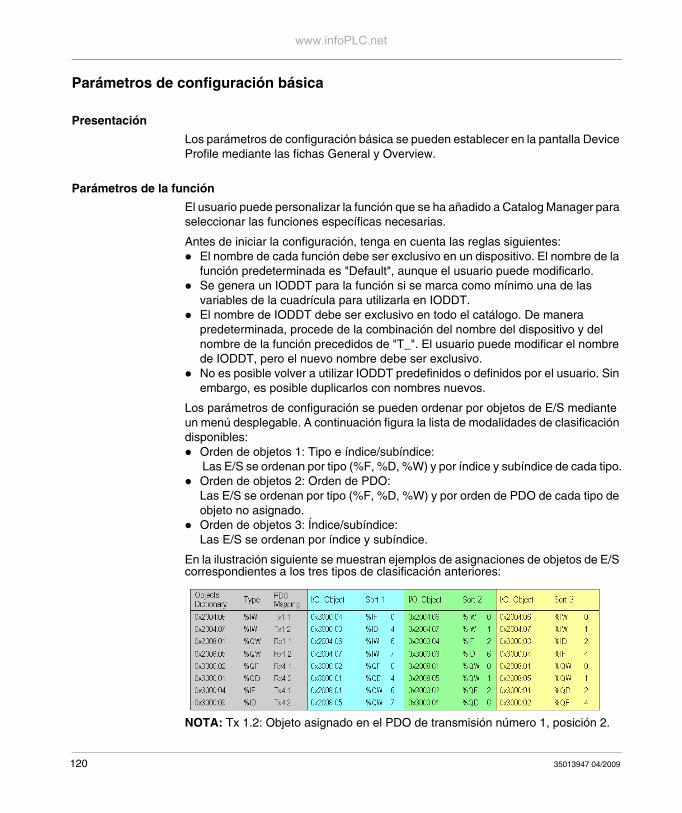
www.infoPLC.net
Parámetros de configuración básica
Presentación
Los parámetros de configuración básica se pueden establecer en la pantalla Device Profile mediante las fichas General y Overview.
Parámetros de la función
El usuario puede personalizar la función que se ha añadido a Catalog Manager para seleccionar las funciones específicas necesarias.
Antes de iniciar la configuración, tenga en cuenta las reglas siguientes: El nombre de cada función debe ser exclusivo en un dispositivo. El nombre de la
función predeterminada es "Default", aunque el usuario puede modificarlo. Se genera un IODDT para la función si se marca como mínimo una de las
variables de la cuadrícula para utilizarla en IODDT. El nombre de IODDT debe ser exclusivo en todo el catálogo. De manera
predeterminada, procede de la combinación del nombre del dispositivo y del nombre de la función precedidos de "T_". El usuario puede modificar el nombre de IODDT, pero el nuevo nombre debe ser exclusivo.
No es posible volver a utilizar IODDT predefinidos o definidos por el usuario. Sin embargo, es posible duplicarlos con nombres nuevos.
Los parámetros de configuración se pueden ordenar por objetos de E/S mediante un menú desplegable. A continuación figura la lista de modalidades de clasificación disponibles: Orden de objetos 1: Tipo e índice/subíndice:
Las E/S se ordenan por tipo (%F, %D, %W) y por índice y subíndice de cada tipo. Orden de objetos 2: Orden de PDO:
Las E/S se ordenan por tipo (%F, %D, %W) y por orden de PDO de cada tipo de objeto no asignado.
Orden de objetos 3: Índice/subíndice: Las E/S se ordenan por índice y subíndice.
En la ilustración siguiente se muestran ejemplos de asignaciones de objetos de E/S correspondientes a los tres tipos de clasificación anteriores:
NOTA: Tx 1.2: Objeto asignado en el PDO de transmisión número 1, posición 2.
120 35013947 04/2009
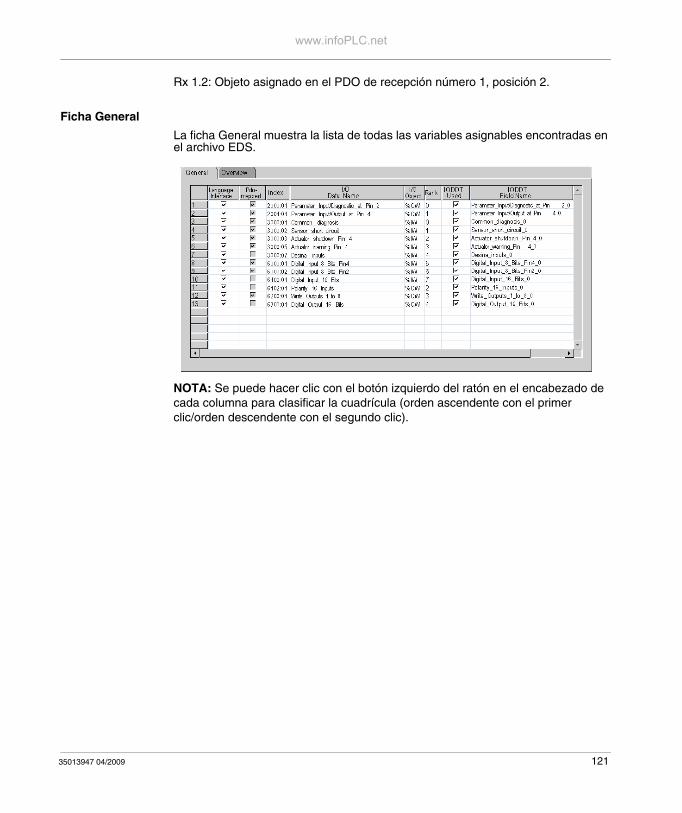
www.infoPLC.net
Rx 1.2: Objeto asignado en el PDO de recepción número 1, posición 2.
Ficha General
La ficha General muestra la lista de todas las variables asignables encontradas en el archivo EDS.
NOTA: Se puede hacer clic con el botón izquierdo del ratón en el encabezado de cada columna para clasificar la cuadrícula (orden ascendente con el primer clic/orden descendente con el segundo clic).
35013947 04/2009 121
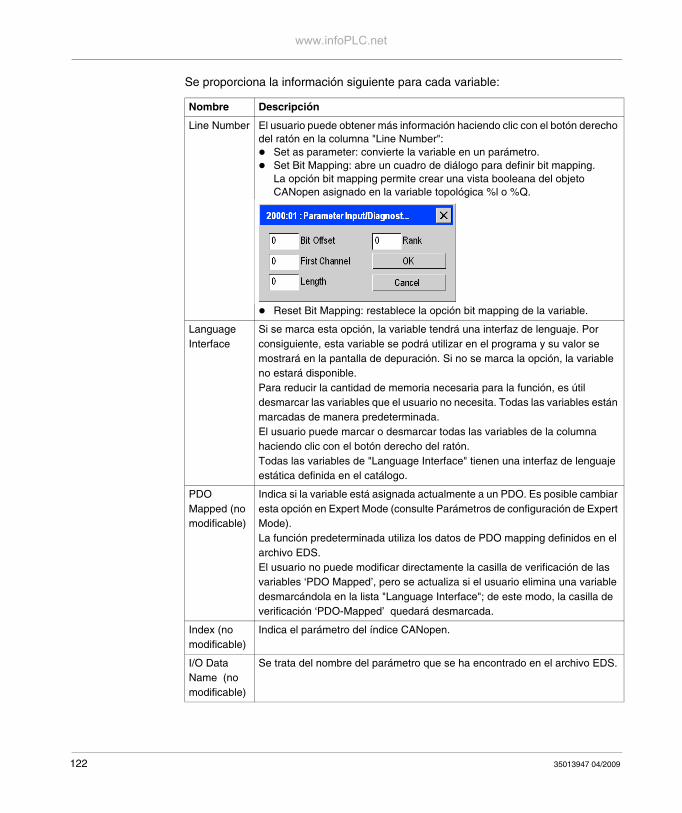
www.infoPLC.net
Se proporciona la información siguiente para cada variable:
Nombre Descripción
Line Number El usuario puede obtener más información haciendo clic con el botón derecho del ratón en la columna "Line Number": Set as parameter: convierte la variable en un parámetro. Set Bit Mapping: abre un cuadro de diálogo para definir bit mapping.
La opción bit mapping permite crear una vista booleana del objeto CANopen asignado en la variable topológica %l o %Q.
Reset Bit Mapping: restablece la opción bit mapping de la variable.
Language Interface
Si se marca esta opción, la variable tendrá una interfaz de lenguaje. Por consiguiente, esta variable se podrá utilizar en el programa y su valor se mostrará en la pantalla de depuración. Si no se marca la opción, la variable no estará disponible. Para reducir la cantidad de memoria necesaria para la función, es útil desmarcar las variables que el usuario no necesita. Todas las variables están marcadas de manera predeterminada.El usuario puede marcar o desmarcar todas las variables de la columna haciendo clic con el botón derecho del ratón.Todas las variables de "Language Interface" tienen una interfaz de lenguaje estática definida en el catálogo.
PDO Mapped (no modificable)
Indica si la variable está asignada actualmente a un PDO. Es posible cambiar esta opción en Expert Mode (consulte Parámetros de configuración de Expert Mode).La función predeterminada utiliza los datos de PDO mapping definidos en el archivo EDS.El usuario no puede modificar directamente la casilla de verificación de las variables ‘PDO Mapped’, pero se actualiza si el usuario elimina una variable desmarcándola en la lista "Language Interface"; de este modo, la casilla de verificación ‘PDO-Mapped’ quedará desmarcada.
Index (no modificable)
Indica el parámetro del índice CANopen.
I/O Data Name (no modificable)
Se trata del nombre del parámetro que se ha encontrado en el archivo EDS.
122 35013947 04/2009
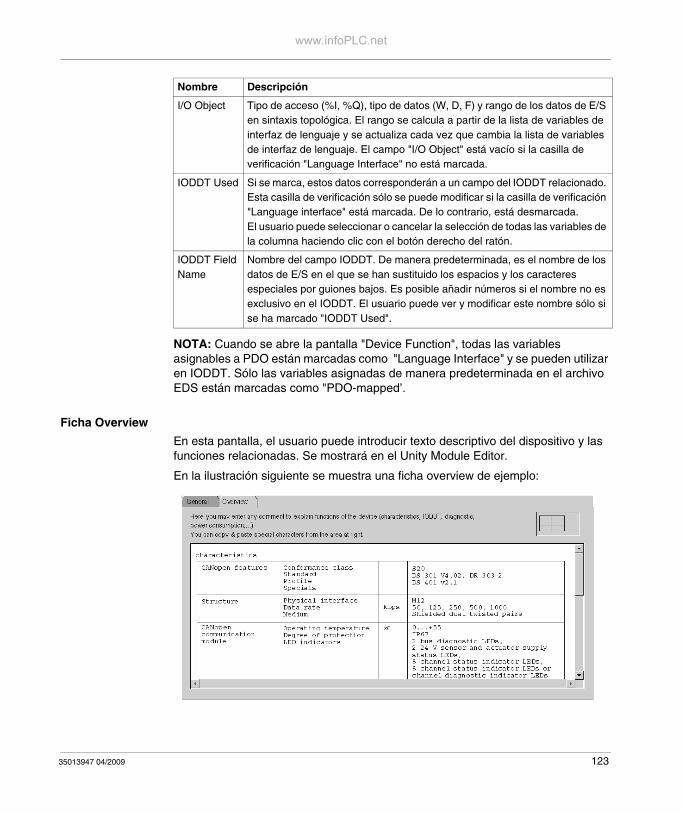
www.infoPLC.net
NOTA: Cuando se abre la pantalla "Device Function", todas las variables asignables a PDO están marcadas como "Language Interface" y se pueden utilizar en IODDT. Sólo las variables asignadas de manera predeterminada en el archivo EDS están marcadas como "PDO-mapped’.
Ficha Overview
En esta pantalla, el usuario puede introducir texto descriptivo del dispositivo y las funciones relacionadas. Se mostrará en el Unity Module Editor.
En la ilustración siguiente se muestra una ficha overview de ejemplo:
I/O Object Tipo de acceso (%I, %Q), tipo de datos (W, D, F) y rango de los datos de E/S en sintaxis topológica. El rango se calcula a partir de la lista de variables de interfaz de lenguaje y se actualiza cada vez que cambia la lista de variables de interfaz de lenguaje. El campo "I/O Object" está vacío si la casilla de verificación "Language Interface" no está marcada.
IODDT Used Si se marca, estos datos corresponderán a un campo del IODDT relacionado. Esta casilla de verificación sólo se puede modificar si la casilla de verificación "Language interface" está marcada. De lo contrario, está desmarcada.El usuario puede seleccionar o cancelar la selección de todas las variables de la columna haciendo clic con el botón derecho del ratón.
IODDT Field Name
Nombre del campo IODDT. De manera predeterminada, es el nombre de los datos de E/S en el que se han sustituido los espacios y los caracteres especiales por guiones bajos. Es posible añadir números si el nombre no es exclusivo en el IODDT. El usuario puede ver y modificar este nombre sólo si se ha marcado "IODDT Used".
Nombre Descripción
35013947 04/2009 123

www.infoPLC.net
El usuario puede rellenar el campo de introducción de datos. Es posible dibujar líneas de cuadrícula mediante la copia de caracteres especiales en el área superior derecha de las ventanas.
124 35013947 04/2009
www.infoPLC.net
Parámetros de configuración de Expert Mode
Presentación
Este párrafo trata sobre los parámetros de configuración de Expert Mode.
La casilla de verificación ‘Expert Mode’ debe estar seleccionada para obtener los parámetros de configuración de Expert Mode.
Los parámetros de configuración de Expert Mode se utilizan para realizar lo siguiente: Eliminar variables Cambiar la asignación de variables Modificar los parámetros de las variables Sustituir el procedimiento de arranque estándar para los dispositivos que no
cumplen los estándares de CANopen Visualizar en modalidad de sólo lectura el contenido del archivo EDS utilizado
para generar el dispositivo
Los parámetros de configuración de Expert Mode se componen de cinco fichas: Ficha PDO mapping Ficha Parameters Ficha Bootup Procedure Ficha Object Dictionary Ficha EDS
NOTA: La configuración de un dispositivo mediante una de las cinco fichas de Expert Mode sólo está disponible en la CPU 20102 o 20302.
NOTA: Las fichas Bootup procedure y Object Dictionary están destinadas a usuarios expertos de CANopen. Si se realizan cambios en la configuración a través de estas fichas se podría configurar el dispositivo de forma incorrecta, lo que puede provocar interrupciones en el bus CANopen.
PDO Mapping
La ficha PDO mapping abre una pantalla experta de CANopen para la configuración de PDO.
La configuración de PDO mapping consta de las tres partes siguientes: Transmit PDOs. Receive PDOs. Variables.
35013947 04/2009 125
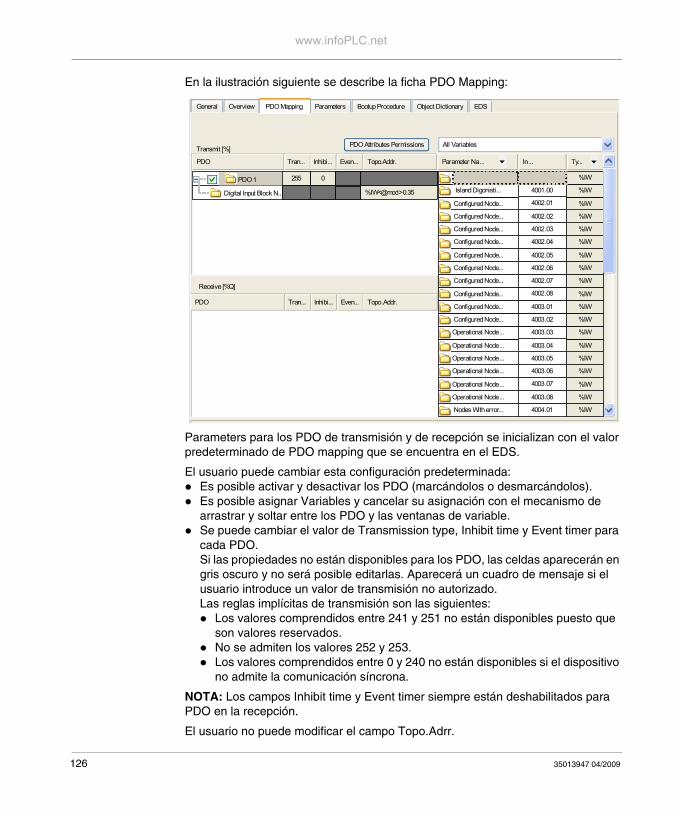
www.infoPLC.net
En la ilustración siguiente se describe la ficha PDO Mapping:
Parameters para los PDO de transmisión y de recepción se inicializan con el valor predeterminado de PDO mapping que se encuentra en el EDS.
El usuario puede cambiar esta configuración predeterminada: Es posible activar y desactivar los PDO (marcándolos o desmarcándolos). Es posible asignar Variables y cancelar su asignación con el mecanismo de
arrastrar y soltar entre los PDO y las ventanas de variable. Se puede cambiar el valor de Transmission type, Inhibit time y Event timer para
cada PDO.Si las propiedades no están disponibles para los PDO, las celdas aparecerán en gris oscuro y no será posible editarlas. Aparecerá un cuadro de mensaje si el usuario introduce un valor de transmisión no autorizado.Las reglas implícitas de transmisión son las siguientes: Los valores comprendidos entre 241 y 251 no están disponibles puesto que
son valores reservados. No se admiten los valores 252 y 253. Los valores comprendidos entre 0 y 240 no están disponibles si el dispositivo
no admite la comunicación síncrona.
NOTA: Los campos Inhibit time y Event timer siempre están deshabilitados para PDO en la recepción.
El usuario no puede modificar el campo Topo.Adrr.
PDO Attributes PermissionsTransmit [%]
Parameter Na... In... Ty...
Receive [%Q]
General Parameters Bootup Procedure Object Dictionary EDSPDO Mapping
Digital Input Block N...
0
%IW<@mod>0.35
Nodes With error...
Operational Node...
Operational Node...
Operational Node...
Operational Node...
Operational Node...
Operational Node...
Configured Node...
Configured Node...
Configured Node...
Configured Node...
Configured Node...
Configured Node...
Configured Node...
Configured Node...
Configured Node...
Configured Node...
Island Digonisti...
Island Digonisti...
4004.01
4003.08
4003.07
4003.06
4003.05
4003.04
4003.03
4003.02
4003.01
4002.08
4002.07
4002.06
4002.05
4002.04
4002.03
4002.02
4002.01
4001.00
4000.00
%IW
%IW
%IW
%IW
%IW
%IW
%IW
%IW
%IW
%IW
%IW
%IW
%IW
%IW
%IW
%IW
%IW
%IW
%IW
All Variables
PDO 1 255
PDO Tran... Inhibi... Even... Topo.Addr.
PDO Tran... Inhibi... Even... Topo.Addr.
Overview
126 35013947 04/2009
www.infoPLC.net
Catalog Manager calcula la parte fija de la dirección topológica correspondiente a las variables asignadas: Access type. Data type. Channel number. Rank.
Sólo se conoce la dirección del módulo si el dispositivo se ha instanciado en una aplicación. Por consiguiente, en la pantalla experta del catálogo se muestra "<@mod>" en lugar de la dirección real del módulo.
NOTA: Las variables se pueden asignar a un PDO aunque esté desactivado. En este caso, estas variables aún tienen una dirección de memoria (asignación de memoria estática) pero no se intercambiarán en el bus y se mostrará un mensaje de advertencia al analizar la aplicación.
35013947 04/2009 127
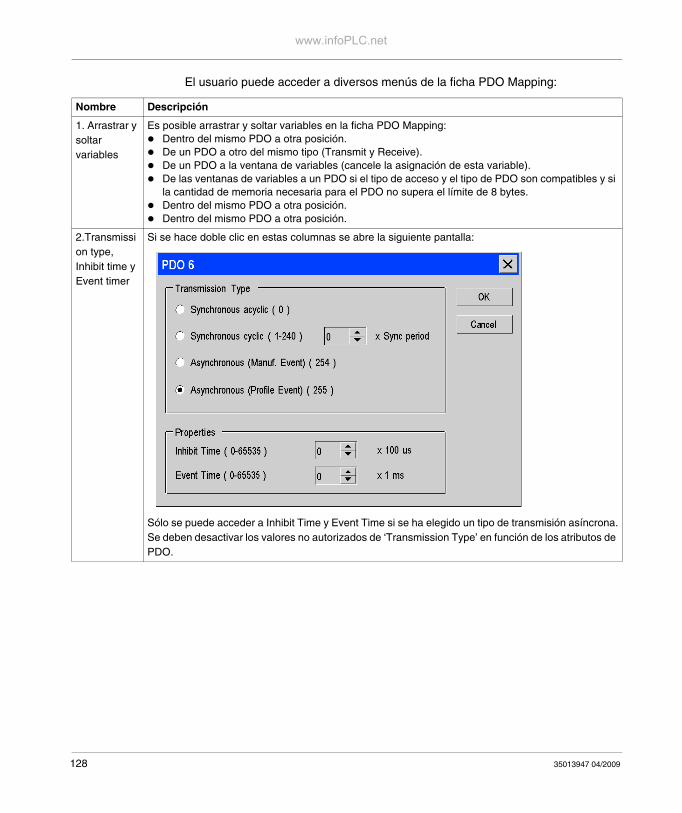
www.infoPLC.net
El usuario puede acceder a diversos menús de la ficha PDO Mapping:
Nombre Descripción
1. Arrastrar y soltar variables
Es posible arrastrar y soltar variables en la ficha PDO Mapping: Dentro del mismo PDO a otra posición. De un PDO a otro del mismo tipo (Transmit y Receive). De un PDO a la ventana de variables (cancele la asignación de esta variable). De las ventanas de variables a un PDO si el tipo de acceso y el tipo de PDO son compatibles y si
la cantidad de memoria necesaria para el PDO no supera el límite de 8 bytes. Dentro del mismo PDO a otra posición. Dentro del mismo PDO a otra posición.
2.Transmission type, Inhibit time y Event timer
Si se hace doble clic en estas columnas se abre la siguiente pantalla:
Sólo se puede acceder a Inhibit Time y Event Time si se ha elegido un tipo de transmisión asíncrona.Se deben desactivar los valores no autorizados de ‘Transmission Type’ en función de los atributos de PDO.
128 35013947 04/2009
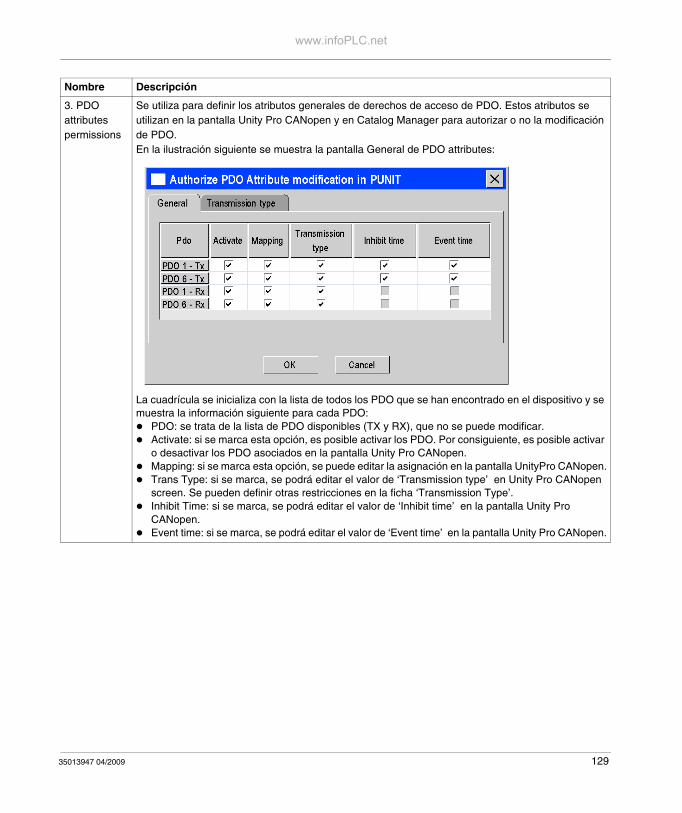
www.infoPLC.net
3. PDO attributes permissions
Se utiliza para definir los atributos generales de derechos de acceso de PDO. Estos atributos se utilizan en la pantalla Unity Pro CANopen y en Catalog Manager para autorizar o no la modificación de PDO.En la ilustración siguiente se muestra la pantalla General de PDO attributes:
La cuadrícula se inicializa con la lista de todos los PDO que se han encontrado en el dispositivo y se muestra la información siguiente para cada PDO: PDO: se trata de la lista de PDO disponibles (TX y RX), que no se puede modificar. Activate: si se marca esta opción, es posible activar los PDO. Por consiguiente, es posible activar
o desactivar los PDO asociados en la pantalla Unity Pro CANopen. Mapping: si se marca esta opción, se puede editar la asignación en la pantalla UnityPro CANopen. Trans Type: si se marca, se podrá editar el valor de ‘Transmission type’ en Unity Pro CANopen
screen. Se pueden definir otras restricciones en la ficha ‘Transmission Type’. Inhibit Time: si se marca, se podrá editar el valor de ‘Inhibit time’ en la pantalla Unity Pro
CANopen. Event time: si se marca, se podrá editar el valor de ‘Event time’ en la pantalla Unity Pro CANopen.
Nombre Descripción
35013947 04/2009 129
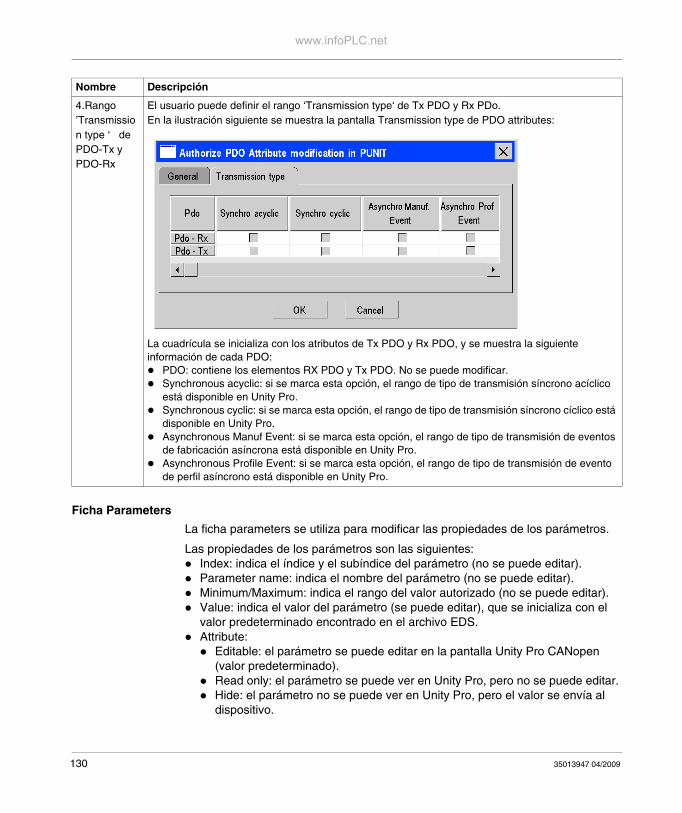
www.infoPLC.net
Ficha Parameters
La ficha parameters se utiliza para modificar las propiedades de los parámetros.
Las propiedades de los parámetros son las siguientes: Index: indica el índice y el subíndice del parámetro (no se puede editar). Parameter name: indica el nombre del parámetro (no se puede editar). Minimum/Maximum: indica el rango del valor autorizado (no se puede editar). Value: indica el valor del parámetro (se puede editar), que se inicializa con el
valor predeterminado encontrado en el archivo EDS. Attribute: Editable: el parámetro se puede editar en la pantalla Unity Pro CANopen
(valor predeterminado). Read only: el parámetro se puede ver en Unity Pro, pero no se puede editar. Hide: el parámetro no se puede ver en Unity Pro, pero el valor se envía al
dispositivo.
4.Rango ’Transmission type ‘ de PDO-Tx y PDO-Rx
El usuario puede definir el rango ‘Transmission type‘ de Tx PDO y Rx PDo.En la ilustración siguiente se muestra la pantalla Transmission type de PDO attributes:
La cuadrícula se inicializa con los atributos de Tx PDO y Rx PDO, y se muestra la siguiente información de cada PDO: PDO: contiene los elementos RX PDO y Tx PDO. No se puede modificar. Synchronous acyclic: si se marca esta opción, el rango de tipo de transmisión síncrono acíclico
está disponible en Unity Pro. Synchronous cyclic: si se marca esta opción, el rango de tipo de transmisión síncrono cíclico está
disponible en Unity Pro. Asynchronous Manuf Event: si se marca esta opción, el rango de tipo de transmisión de eventos
de fabricación asíncrona está disponible en Unity Pro. Asynchronous Profile Event: si se marca esta opción, el rango de tipo de transmisión de evento
de perfil asíncrono está disponible en Unity Pro.
Nombre Descripción
130 35013947 04/2009
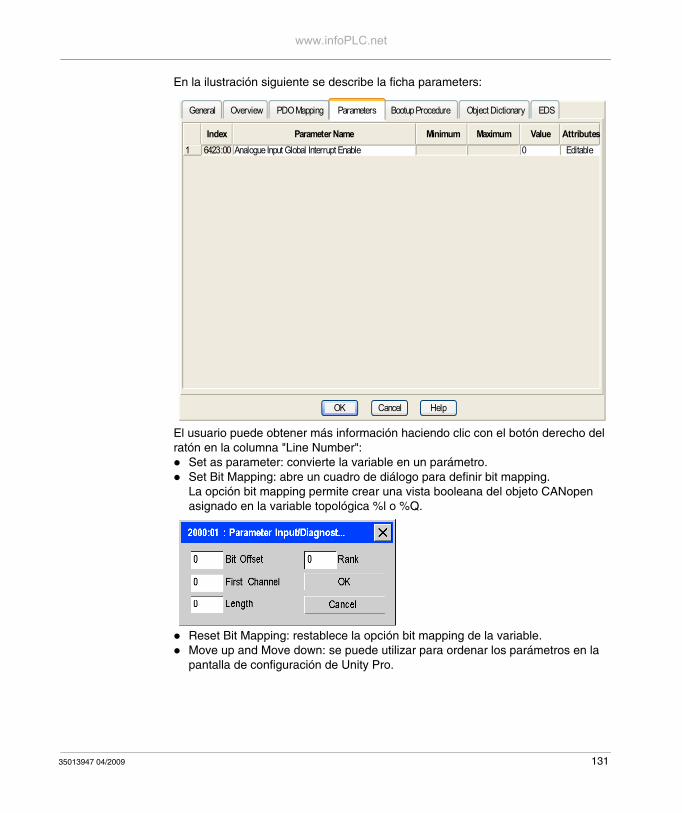
www.infoPLC.net
En la ilustración siguiente se describe la ficha parameters:
El usuario puede obtener más información haciendo clic con el botón derecho del ratón en la columna "Line Number": Set as parameter: convierte la variable en un parámetro. Set Bit Mapping: abre un cuadro de diálogo para definir bit mapping.
La opción bit mapping permite crear una vista booleana del objeto CANopen asignado en la variable topológica %l o %Q.
Reset Bit Mapping: restablece la opción bit mapping de la variable. Move up and Move down: se puede utilizar para ordenar los parámetros en la
pantalla de configuración de Unity Pro.
OK Cancel Help
General Overview Bootup ProcedurePDO Mapping Object Dictionary EDSParameters
Parameter Name Maximum AttributesIndex Minimum Value
1 6423:00 Analogue Input Global Interrupt Enable 0 Editable
35013947 04/2009 131
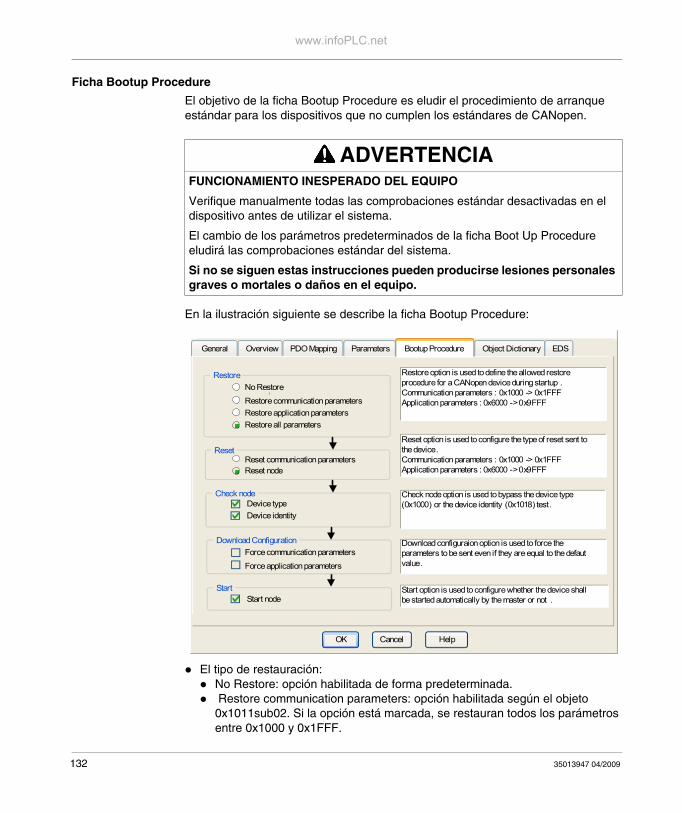
www.infoPLC.net
Ficha Bootup Procedure
El objetivo de la ficha Bootup Procedure es eludir el procedimiento de arranque estándar para los dispositivos que no cumplen los estándares de CANopen.
En la ilustración siguiente se describe la ficha Bootup Procedure:
El tipo de restauración: No Restore: opción habilitada de forma predeterminada. Restore communication parameters: opción habilitada según el objeto
0x1011sub02. Si la opción está marcada, se restauran todos los parámetros entre 0x1000 y 0x1FFF.
ADVERTENCIAFUNCIONAMIENTO INESPERADO DEL EQUIPO
Verifique manualmente todas las comprobaciones estándar desactivadas en el dispositivo antes de utilizar el sistema.
El cambio de los parámetros predeterminados de la ficha Boot Up Procedure eludirá las comprobaciones estándar del sistema.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
OK Cancel Help
Restore option is used to define the allowed restoreprocedure for a CANopen device during startup .Communication parameters : 0x1000 -> 0x1FFFApplication parameters : 0x6000 -> 0x9FFF
Reset option is used to configure the type of reset sent tothe device.Communication parameters : 0x1000 -> 0x1FFFApplication parameters : 0x6000 -> 0x9FFF
Start option is used to configure whether the device shallbe started automatically by the master or not .
Download Configuration
Check node
Reset
Restore
General Overview PDO Mapping Parameters Object Dictionary EDSBootup Procedure
No Restore
Restore communication parameters
Restore application parameters
Start
Device type
Restore all parameters
Reset communication parametersReset node
Device identity
Force communication parameters
Force application parameters
Start node
Download configuraion option is used to force the parameters to be sent even if they are equal to the defaut value.
Check node option is used to bypass the device type(0x1000) or the device identity (0x1018) test.
132 35013947 04/2009
www.infoPLC.net
Restore application parameters: opción habilitada según el objeto 0x1011sub03. Si la opción está marcada y el dispositivo implementa correctamente el servicio, se restauran todos los parámetros de aplicación.
Restore all: opción habilitada según el objeto 0x1011sub01. Si la opción está marcada, se restauran todos los parámetros (valor predeterminado).
El tipo de restablecimiento: Reset communication parameters: opción siempre habilitada. Si la opción
está marcada, se restablecen todos los parámetros de comunicación. Reset node (valor predeterminado): opción siempre habilitada. Si la opción
está marcada, se restablecen todos los parámetros.
El tipo y la identidad del dispositivo de comprobación (marcada de forma predeterminada): Si el valor de identificación del tipo de dispositivo para el esclavo en el
diccionario de objetos 0x1F84 no es 0x0000 ("no tener en cuenta"), se compara con el valor real.
Si el ID del proveedor configurado en el diccionario de objetos 0x1F85 no es 0x0000 ("no tener en cuenta"), se lee el índice de esclavo 0x1018, subíndice 1 y se compara con el valor real.
La misma comparación se realiza con ProductCode, RevisionNumber y SerialNumber con los objetos 0x1F86-0x1F88 correspondientes.
NOTA: La opción de tipo de dispositivo sin marcar fuerza el diccionario de objetos 0x1F84 a 0x0000.
NOTA: La opción de identidad sin marcar fuerza el diccionario de objetos 0x1F86-0x1F88 (ID de nodo de subdispositivo) a 0x0000.
Forzar la descarga de parámetros de comunicación o configuración (no marcada de forma predeterminada). Si se marca esta opción, se fuerza la descarga de todos los objetos correspondientes. Si no se marca, deberá seguir estas normas estándar: Los parámetros se descargan si son diferentes del valor predeterminado. Los parámetros se descargan si se fuerzan en el diccionario de objetos. Los parámetros no se descargan en los demás casos.
The Start Node:Si la opción está marcada (valor predeterminado), el maestro de CANopen inicia automáticamente el dispositivo después del procedimiento de arranque.Si la opción no está marcada, el dispositivo permanece en estado preoperativo después del procedimiento de arranque. En este caso, el dispositivo se debe iniciar mediante el programa de aplicación.
35013947 04/2009 133
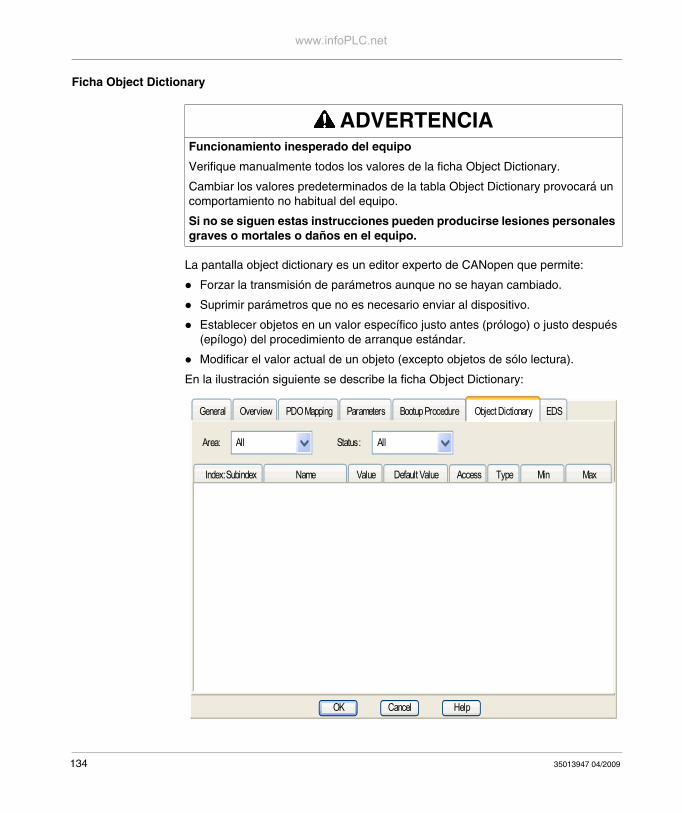
www.infoPLC.net
Ficha Object Dictionary
La pantalla object dictionary es un editor experto de CANopen que permite:
Forzar la transmisión de parámetros aunque no se hayan cambiado.
Suprimir parámetros que no es necesario enviar al dispositivo.
Establecer objetos en un valor específico justo antes (prólogo) o justo después (epílogo) del procedimiento de arranque estándar.
Modificar el valor actual de un objeto (excepto objetos de sólo lectura).
En la ilustración siguiente se describe la ficha Object Dictionary:
ADVERTENCIAFuncionamiento inesperado del equipo
Verifique manualmente todos los valores de la ficha Object Dictionary.
Cambiar los valores predeterminados de la tabla Object Dictionary provocará un comportamiento no habitual del equipo.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
OK Cancel Help
Area: Status:All
Name Value Default Value Access Type
General Overview PDO Mapping Parameters Bootup Procedure EDS
Index:Subindex Min Max
Object Dictionary
All
134 35013947 04/2009
www.infoPLC.net
Puede seleccionar dos filtros para reducir el número de objetos visualizados en la cuadrícula:
Puede hacer clic con el botón derecho del ratón en un objeto para ejecutar la función:
Area filter
All Muestra toda el área.
Prologue/Epilogue Muestra sólo proyectos de prólogo y epílogo.
[XXXX...XXXX] Muestra sólo objetos entre XXXX y XXXX.
Status filter
All Muestra todos los objetos.
Configured Muestra sólo los objetos transmitidos al dispositivo durante el arranque.
Not Configured Muestra sólo los objetos no transmitidos al dispositivo.
Modified Muestra sólo los objetos cuyos valores son diferentes de los valores predeterminados.
Clic con el botón derecho del ratón en un objeto en las secciones de prólogo y epílogo:
Cut Corta la fila y copia el objeto en el portapapeles.
Copy Copia el objeto en el portapapeles.
Paste Pega el objeto en la fila seleccionada.
Delete Elimina el objeto seleccionado.
Move up Se utiliza para gestionar el orden de la lista.
Move down Se utiliza para gestionar el orden de la lista.
Configured Si se marca, el objeto se transmite al dispositivo.
Expand all Expande todos los nodos del árbol.
Collapse all Contrae todos los nodos del árbol.
Clic con el botón derecho del ratón en un objeto en las secciones estándar:
Copy Copia el objeto en el portapapeles.
Configured Si se marca, el objeto se transmite al dispositivo.
Expand all Expande todos los nodos del árbol.
Collapse all Contrae todos los nodos del árbol.
35013947 04/2009 135
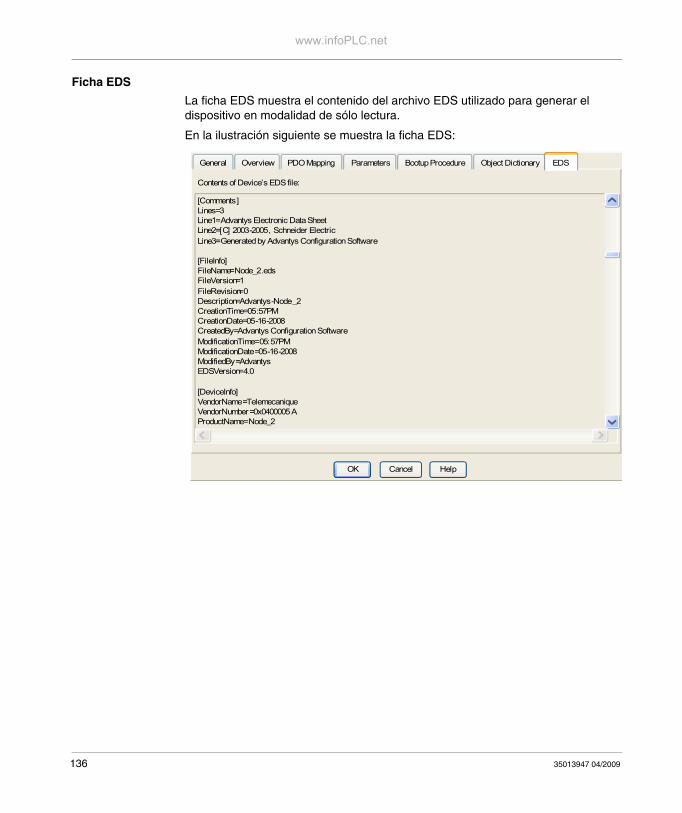
www.infoPLC.net
Ficha EDS
La ficha EDS muestra el contenido del archivo EDS utilizado para generar el dispositivo en modalidad de sólo lectura.
En la ilustración siguiente se muestra la ficha EDS:
OK HelpCancel
General Overview PDO Mapping Parameters Bootup Procedure
[Comments]Lines=3Line1=Advantys Electronic Data SheetLine2=[C] 2003-2005, Schneider ElectricLine3=Generated by Advantys Configuration Software
[FileInfo]FileName=Node_2.edsFileVersion=1FileRevision=0Description=Advantys-Node_2CreationTime=05:57PMCreationDate=05-16-2008CreatedBy=Advantys Configuration SoftwareModificationTime=05:57PMModificationDate=05-16-2008ModifiedBy=AdvantysEDSVersion=4.0
[DeviceInfo]VendorName=TelemecaniqueVendorNumber=0x0400005AProductName=Node_2
Contents of Device’s EDS file:
Object Dictionary EDS
136 35013947 04/2009
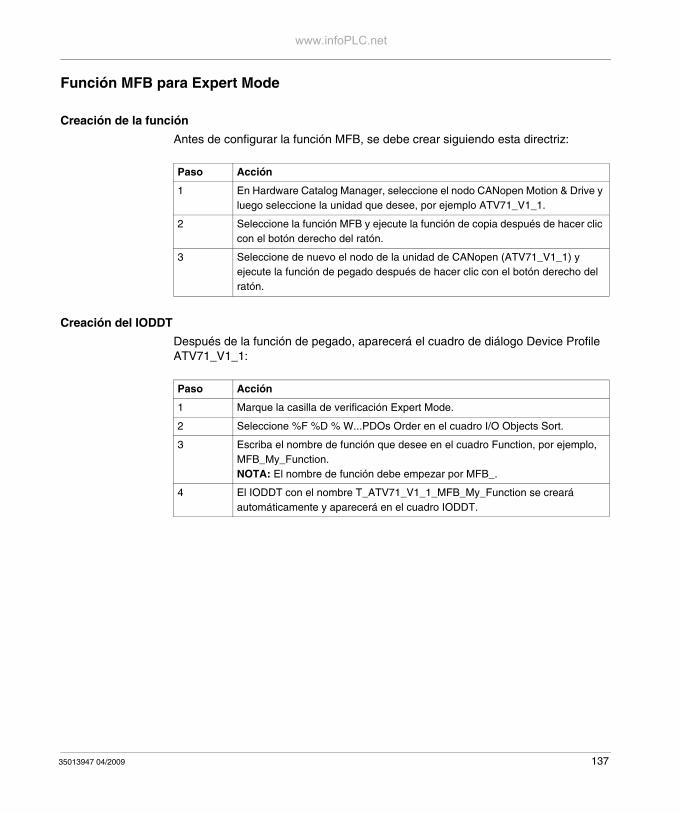
www.infoPLC.net
Función MFB para Expert Mode
Creación de la función
Antes de configurar la función MFB, se debe crear siguiendo esta directriz:
Creación del IODDT
Después de la función de pegado, aparecerá el cuadro de diálogo Device Profile ATV71_V1_1:
Paso Acción
1 En Hardware Catalog Manager, seleccione el nodo CANopen Motion & Drive y luego seleccione la unidad que desee, por ejemplo ATV71_V1_1.
2 Seleccione la función MFB y ejecute la función de copia después de hacer clic con el botón derecho del ratón.
3 Seleccione de nuevo el nodo de la unidad de CANopen (ATV71_V1_1) y ejecute la función de pegado después de hacer clic con el botón derecho del ratón.
Paso Acción
1 Marque la casilla de verificación Expert Mode.
2 Seleccione %F %D % W...PDOs Order en el cuadro I/O Objects Sort.
3 Escriba el nombre de función que desee en el cuadro Function, por ejemplo, MFB_My_Function.NOTA: El nombre de función debe empezar por MFB_.
4 El IODDT con el nombre T_ATV71_V1_1_MFB_My_Function se creará automáticamente y aparecerá en el cuadro IODDT.
35013947 04/2009 137
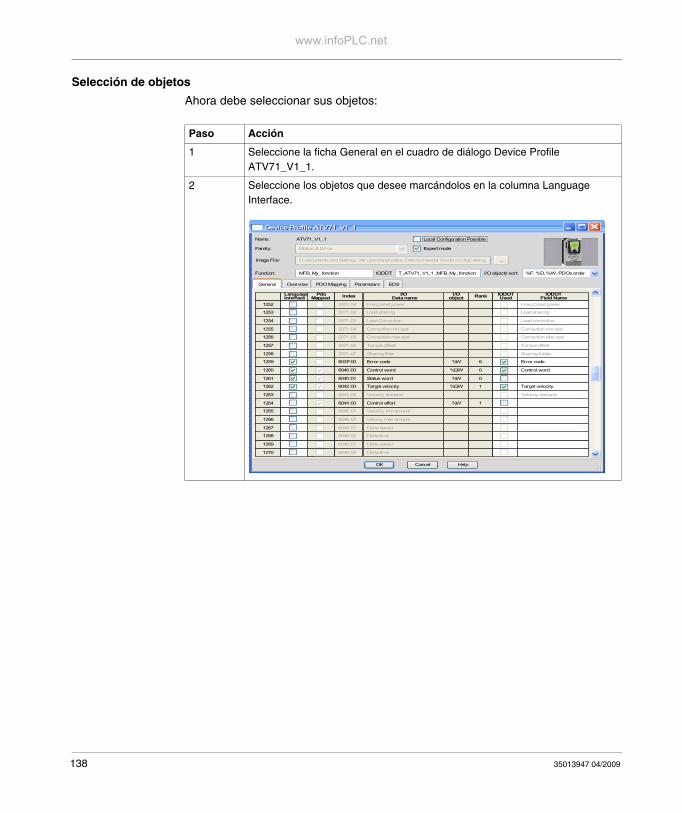
www.infoPLC.net
Selección de objetos
Ahora debe seleccionar sus objetos:
Paso Acción
1 Seleccione la ficha General en el cuadro de diálogo Device Profile ATV71_V1_1.
2 Seleccione los objetos que desee marcándolos en la columna Language Interface.
Device Profile ATV71_V1_1Device Profile ATV71_V1_1
OK Cancel
1270
1269
1268
1267
1266
1265
1264
1263
1262
1261
1260
1259
1258
1257
1256
1255
1254
1253
1252
Language Interface
PdoMapped
6049:02
6049:01
6048:02
6048:01
6046:02
6046:01
6044:00
6043:00
6042:00
6040:01
6040:00
603F:00
2071:07
2071:06
2071:05
2071:04
2071:03
2071:02
2070.04
Index
%W
%QW
%W
%QW
%W
I/Oobject
1
1
0
0
6
Rank IODOT Used
Velocity demand
Target velocity
Control word
Error code
Sharing folder
Torque offset
Correction Max.spd
Correction min spd
Load correction
Load sharing
Freq.Const power
IODOT Field Name
OverviewGeneral PDO Mapping Parametars EDS
Local Configuration Possible
Expert mode
Name:
Motion & Drive
D:\documents and Settings \All users\Application Data\Schneider Electric\CofgCatalog
MFB_My_fonction T_ATV71_V1_1_MFB_My_fonctionIODDT: I/O objects sort: %F, %D, %W, PDOs order
...
Delta time
Delta speed
Delta time
Delta speed
Velociy max amount
Velocity min amount
Control effort
Velocity demand
Target velocity
Status word
Control word
Error code
Sharing filter
Torque offset
Correction max spd
Correction min spd
Load Correction
Load sharing
Freq.const power
I/OData name
Family:
Image File:
Function:
ATV71_V1_1
Help
138 35013947 04/2009
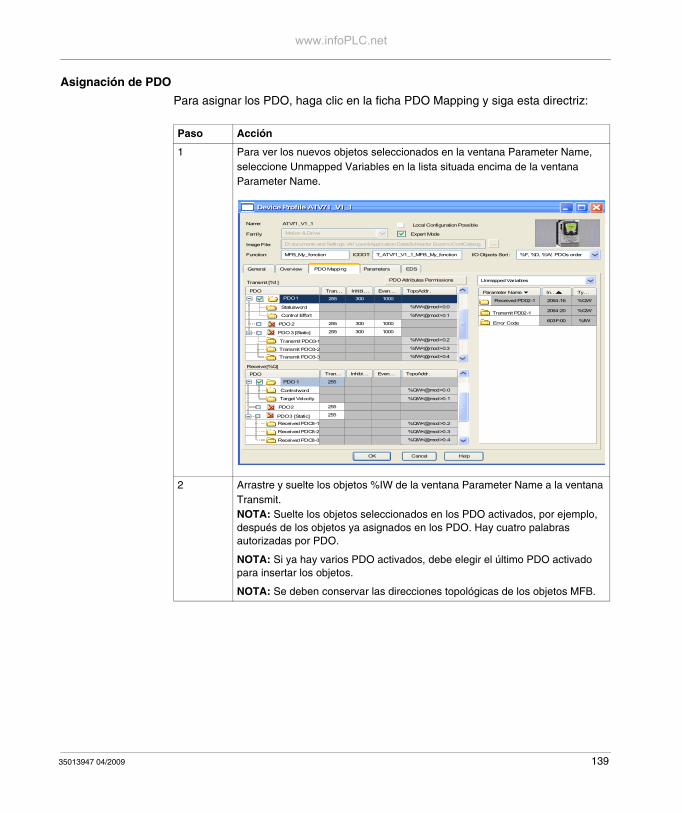
www.infoPLC.net
Asignación de PDO
Para asignar los PDO, haga clic en la ficha PDO Mapping y siga esta directriz:
Paso Acción
1 Para ver los nuevos objetos seleccionados en la ventana Parameter Name, seleccione Unmapped Variables en la lista situada encima de la ventana Parameter Name.
2 Arrastre y suelte los objetos %IW de la ventana Parameter Name a la ventana Transmit.NOTA: Suelte los objetos seleccionados en los PDO activados, por ejemplo, después de los objetos ya asignados en los PDO. Hay cuatro palabras autorizadas por PDO.
NOTA: Si ya hay varios PDO activados, debe elegir el último PDO activado para insertar los objetos.
NOTA: Se deben conservar las direcciones topológicas de los objetos MFB.
Device Profile ATV71_V1_1Device Profile ATV71_V1_1
Transmit [%1]
OK Cancel Help
%F, %D, %W, PDOs orderATV71_V1_1
Name:
Family:
Image File:
Function:
D:\documents and Settings \All Users\Application Data\Schneider Electric\ContCatalog …
T_ATV71_V1_1_MFB_My_fonction I/O Objects Sort:
Motion & Drive
MFB_My_fonction IODDT:
Local Configuration Possible
Expert Mode
ATV71_V1_1
General Overview Parameters EDSPDO Mapping
PDO Attributes Permissions
Receive [%Q]
Unmapped Variables
In… Ty…
Received PD02-1
Transmit PD02-1
Error Code
2064:16
2064:20
603f:00
Enter Text `
Target Velocity
Received PDO3-1
PDO 3 [Static]
PDO 2
Received PDO3-2
Received PDO3-3
255
255
255
PDO 1
%QW<@mod>0.0
%QW<@mod>0.1
%QW<@mod>0.2
%QW<@mod>0.3
%QW<@mod>0.4
Enter Text Statusword
Control Effort
Transmit PDO3-1
PDO 3 [Static]
PDO 2
Transmit PDO3-2
Transmit PDO3-3
255
255
255
300
300
300
1000
1000
1000
PDO 1
%fW<@mod>0.0
%fW<@mod>0.1
%fW<@mod>0.2
%fW<@mod>0.3
%fW<@mod>0.4
Parameter Name ...
...
PDO Tran… Inhibi… Even… TopoAddr .
PDO Tran… Inhibi… Even… TopoAddr .
2064:16
2064:20
603F:00
%QW
%QW
%fW
Controlword
35013947 04/2009 139
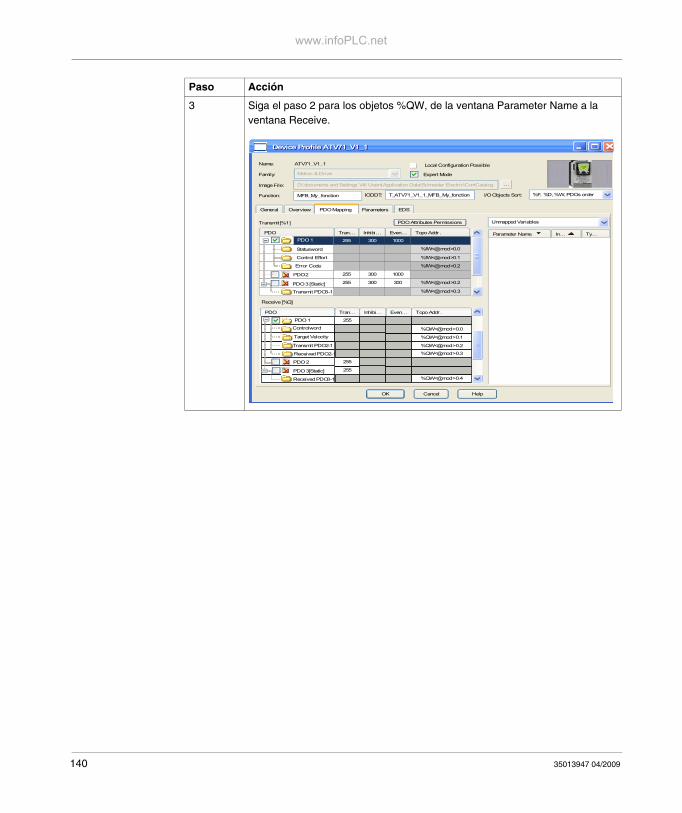
www.infoPLC.net
3 Siga el paso 2 para los objetos %QW, de la ventana Parameter Name a la ventana Receive.
Paso Acción
Device Profile ATV71_V1_1Device Profile ATV71_V1_1
Transmit [%1]
OK Cancel Help
%F, %D, %W, PDOs orderATV71_V1_1
Name:
Family:
Image File:
Function:
D:\documents and Settings \All Users\Application Data\Schneider Electric\ContCatalog …
T_ATV71_V1_1_MFB_My_fonction I/O Objects Sort:
Motion & Drive
MFB_My_fonction IODDT:
Local Configuration Possible
Expert Mode
ATV71_V1_1
General Overview Parameters EDSPDO Mapping
Receive [%Q]
Unmapped Variables
In… Ty…
Enter Text
PDO1
Enter Text Statusword
Control Effort
Transmit PDO3-1
PDO 3 [Static]
PDO 2
255
255
255
300
300
300
1000
1000
300
PDO 1
%fW<@mod>0.0
%fW<@mod>0.1
%fW<@mod>0.2
%fW<@mod>0.2
%fW<@mod>0.3
PDO Tran… Inhibi… Even… Topo Addr .
Parameter Name
PDO Attributes Permissions
Error Code
PDO Tran… Inhibi… Even… Topo Addr .
255
255
255
%QW<@mod>0.4
%QW<@mod>0.3
%QW<@mod>0.2
%QW<@mod>0.1
%QW<@mod>0.0
PDO 1
Controlword
Target Velocity
Received PDO3-1
Transmit PDO2-1
Received PDO2-1
PDO 2
PDO 3[Static]
140 35013947 04/2009
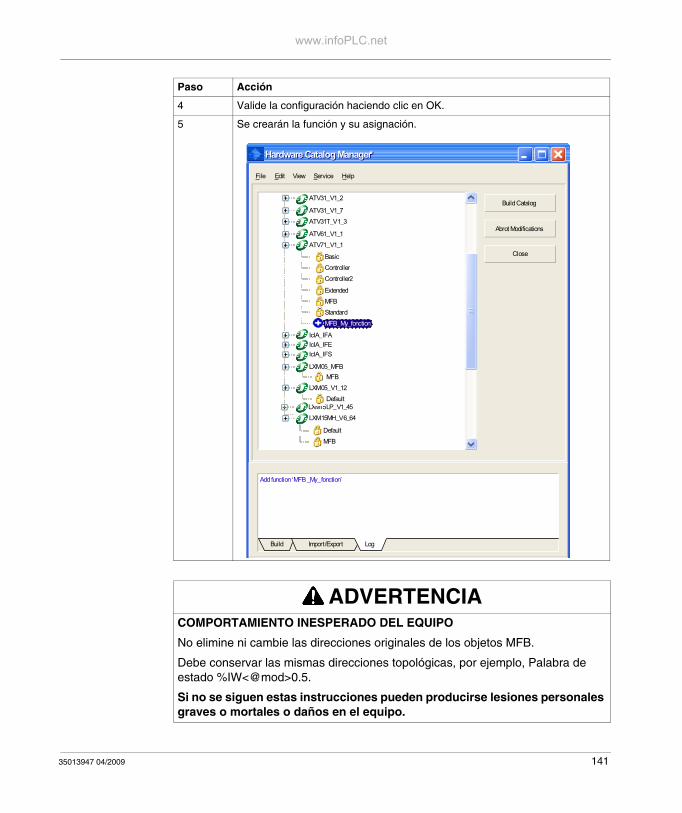
www.infoPLC.net
4 Valide la configuración haciendo clic en OK.
5 Se crearán la función y su asignación.
ADVERTENCIACOMPORTAMIENTO INESPERADO DEL EQUIPO
No elimine ni cambie las direcciones originales de los objetos MFB.
Debe conservar las mismas direcciones topológicas, por ejemplo, Palabra de estado %IW<@mod>0.5.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
Paso Acción
Hardware Catalog Manager*Hardware Catalog Manager*
Close
Abrot Modifications
Build CatalogATV31_V1_2
ATV31_V1_7
ATV31T_V1_3
ATV61_V1_1
ATV71_V1_1
Basic
Controller
Controller2
MFB
Standard
IcIA_IFA
IcIA_IFS
IcIA_IFE
LXM05_MFB
LXM05_V1_12
LXM15LP_V1_45
LXM15MH_V6_64
File Edit View Service Help
Add function ‘MFB_My_fonction’
Extended
MFB
Default
Default
MFB
Import/ExportBuild Log
MFB_My_fonction
35013947 04/2009 141
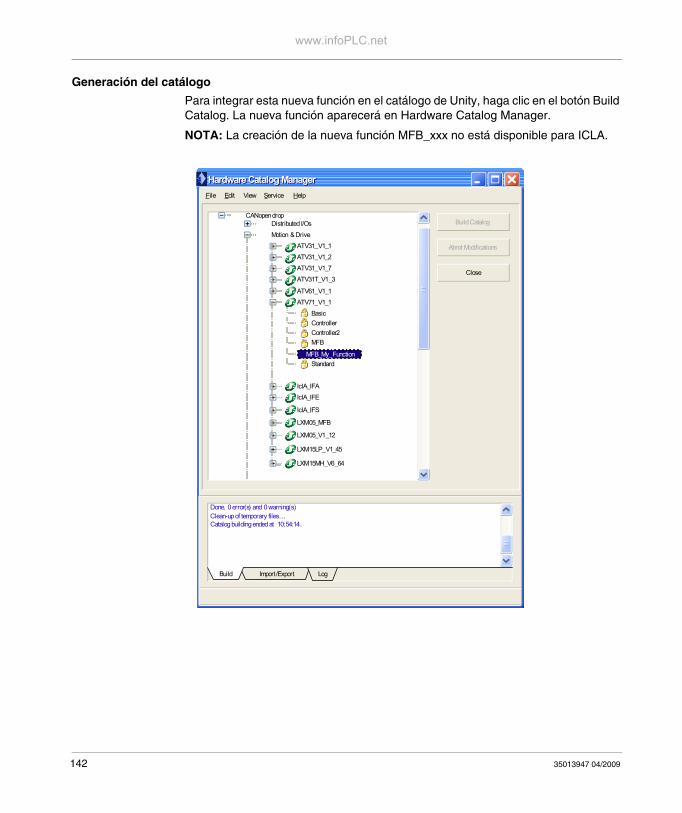
www.infoPLC.net
Generación del catálogo
Para integrar esta nueva función en el catálogo de Unity, haga clic en el botón Build Catalog. La nueva función aparecerá en Hardware Catalog Manager.
NOTA: La creación de la nueva función MFB_xxx no está disponible para ICLA.
Hardware Catalog ManagerHardware Catalog Manager
Close
Abrot Modifications
Build CatalogCANopen drop
Distributed I/Os
Motion & Drive
ATV31_V1_1
ATV31_V1_2
ATV31_V1_7
ATV31T_V1_3
ATV61_V1_1
ATV71_V1_1
Basic
Controller
Controller2
MFB
Standard
IcIA_IFA
IcIA_IFS
IcIA_IFE
LXM05_MFB
LXM05_V1_12
LXM15LP_V1_45
LXM15MH_V6_64
Done, 0 error(s) and 0 warning(s)Clean-up of temporary files…Catalog building ended at 10:54:14.
File Edit View Service Help
MFB_My_Function
Import/Export LogBuild
142 35013947 04/2009
www.infoPLC.net
Restricciones de compatibilidad de CANopen
Tabla de compatibilidad
Desde el punto de vista de la compatibilidad de CANopen, las CPU 2010/2030/2030H (véase página 16) son idénticas. Tenga en cuenta que no existe compatibilidad ascendente entre una aplicación desarrollada con una CPU 2010/2030/2030H y 20102/20302. Antes de iniciar la aplicación, consulte la tabla siguiente para comprobar la compatibilidad con su configuración:
Aplicación desarrollada con
Restricciones
Unity Pro V3.0 o Unity Pro V4.0 con una CPU 2010/2030/2030H.
Descargar en la CPU 20102/20302: no es compatible a menos que se ejecute el comando reemplazar CPU.
Unity Pro V4.1 con una CPU 2010/2030/2030H.
Abrir con Unity Pro V3.0: compatible con la importación del archivo XEF.Descargar en la CPU 20102/20302: no es compatible a menos que se ejecute el comando reemplazar CPU.
Unity Pro V4.1 con una CPU 20102/20302.Nota: Las funciones expertas de CANopen sólo están disponibles con estas CPU.
Abrir con Unity Pro V3.0: no compatible.Descargar en la CPU 2010/2030/2030H: no es compatible a menos que se ejecute el comando reemplazar CPU, pero las funciones expertas (Boot Up Procedure [Procedimiento de arranque] y Object Dictionary [Diccionario de objetos]) ya no estarán disponibles.
35013947 04/2009 143
www.infoPLC.net
Copia o eliminación de una función
Presentación
Es posible copiar funciones de un dispositivo a otro y eliminarlas de la base de datos de Catalog Manager.
Copy
La función Copy sólo está disponible si la opción "Function" de un dispositivo está seleccionada en la pantalla principal de Catalog Manager.
Siga las instrucciones que figuran a continuación para copiar una función: Seleccione Edit->Copy. Haga clic con el botón derecho del ratón en el nombre de la función y seleccione
'Copy'.
Los parámetros de la función se almacenan en el portapapeles y se pueden pegar a continuación en un dispositivo compatible.
Paste
La función Paste sólo está disponible si la opción "Function" está en el portapapeles y si se ha seleccionado un dispositivo en la pantalla principal de Catalog Manager.
Siga las instrucciones que figuran a continuación para pegar una función: Seleccione Edit->Paste. Haga clic con el botón derecho del ratón en el dispositivo y seleccione 'Paste'.
No es necesario volver a especificar el archivo EDS. El archivo EDS completo ya está almacenado con el dispositivo.
La pantalla "Device Function" aparece tras pegar una función. La nueva función se inicializa con los datos de la función de origen. Se propone el mismo nombre para la nueva función, que el usuario debe modificar antes de guardarla.
Es posible modificar y guardar el resto de información de la nueva función.
Delete
El usuario puede eliminar funciones:
Siga las instrucciones que figuran a continuación para eliminar una función: Seleccione una función de un dispositivo. Haga clic con el botón derecho del ratón en el nombre de la función y seleccione
'Delete'.OSeleccione Edit->Delete.
Aparecerá un mensaje que le solicitará confirmación; haga clic en OK para continuar.
Para guardar los cambios, haga clic en el botón ‘Build Catalog’.
144 35013947 04/2009
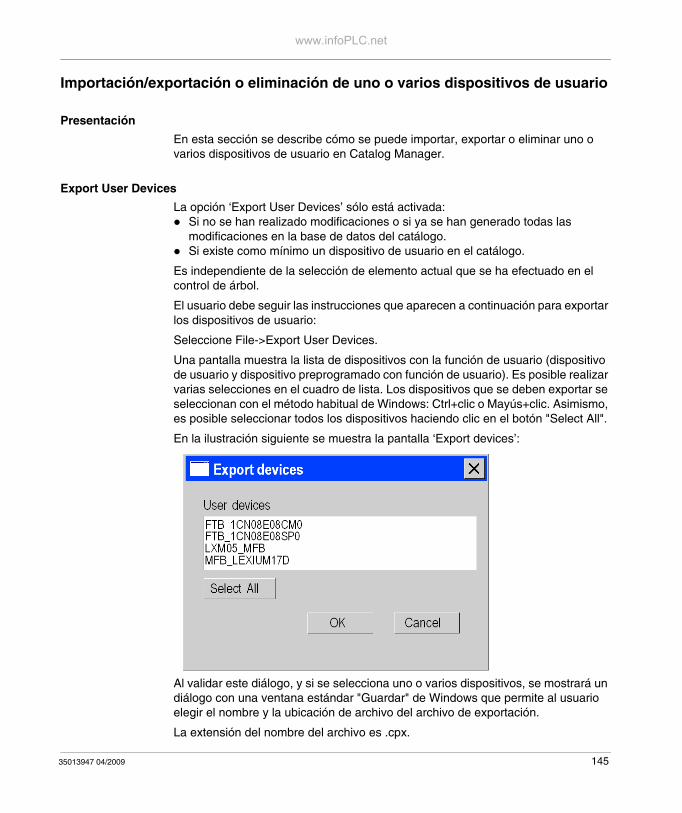
www.infoPLC.net
Importación/exportación o eliminación de uno o varios dispositivos de usuario
Presentación
En esta sección se describe cómo se puede importar, exportar o eliminar uno o varios dispositivos de usuario en Catalog Manager.
Export User Devices
La opción ‘Export User Devices’ sólo está activada: Si no se han realizado modificaciones o si ya se han generado todas las
modificaciones en la base de datos del catálogo. Si existe como mínimo un dispositivo de usuario en el catálogo.
Es independiente de la selección de elemento actual que se ha efectuado en el control de árbol.
El usuario debe seguir las instrucciones que aparecen a continuación para exportar los dispositivos de usuario:
Seleccione File->Export User Devices.
Una pantalla muestra la lista de dispositivos con la función de usuario (dispositivo de usuario y dispositivo preprogramado con función de usuario). Es posible realizar varias selecciones en el cuadro de lista. Los dispositivos que se deben exportar se seleccionan con el método habitual de Windows: Ctrl+clic o Mayús+clic. Asimismo, es posible seleccionar todos los dispositivos haciendo clic en el botón "Select All".
En la ilustración siguiente se muestra la pantalla ‘Export devices’:
Al validar este diálogo, y si se selecciona uno o varios dispositivos, se mostrará un diálogo con una ventana estándar "Guardar" de Windows que permite al usuario elegir el nombre y la ubicación de archivo del archivo de exportación.
La extensión del nombre del archivo es .cpx.
35013947 04/2009 145
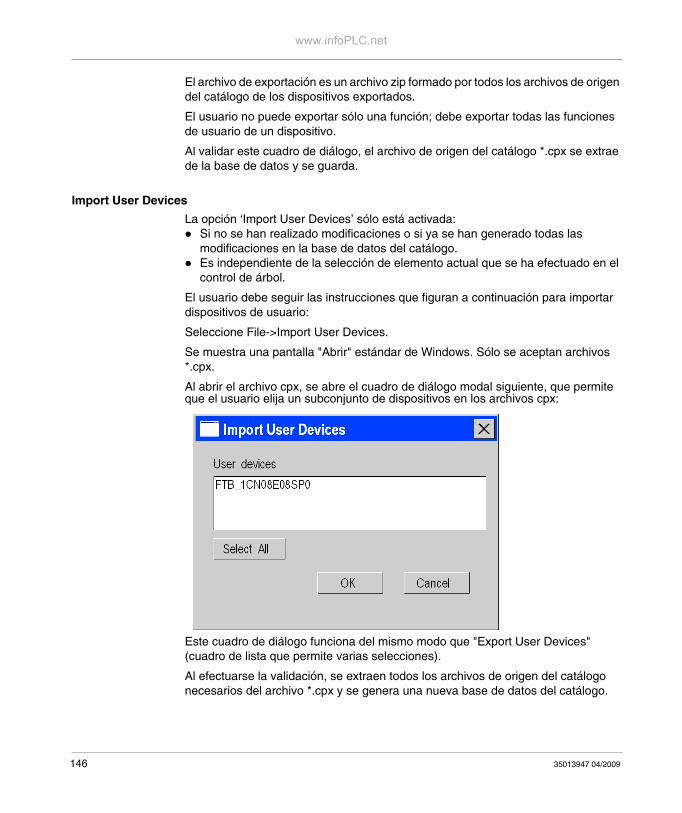
www.infoPLC.net
El archivo de exportación es un archivo zip formado por todos los archivos de origen del catálogo de los dispositivos exportados.
El usuario no puede exportar sólo una función; debe exportar todas las funciones de usuario de un dispositivo.
Al validar este cuadro de diálogo, el archivo de origen del catálogo *.cpx se extrae de la base de datos y se guarda.
Import User Devices
La opción ‘Import User Devices’ sólo está activada: Si no se han realizado modificaciones o si ya se han generado todas las
modificaciones en la base de datos del catálogo. Es independiente de la selección de elemento actual que se ha efectuado en el
control de árbol.
El usuario debe seguir las instrucciones que figuran a continuación para importar dispositivos de usuario:
Seleccione File->Import User Devices.
Se muestra una pantalla "Abrir" estándar de Windows. Sólo se aceptan archivos *.cpx.
Al abrir el archivo cpx, se abre el cuadro de diálogo modal siguiente, que permite que el usuario elija un subconjunto de dispositivos en los archivos cpx:
Este cuadro de diálogo funciona del mismo modo que "Export User Devices" (cuadro de lista que permite varias selecciones).
Al efectuarse la validación, se extraen todos los archivos de origen del catálogo necesarios del archivo *.cpx y se genera una nueva base de datos del catálogo.
146 35013947 04/2009
www.infoPLC.net
Esta nueva base de datos contiene lo siguiente: Todos los dispositivos principales de Schneider existentes en la base de datos
antigua Todos los dispositivos de usuario existentes en la base de datos antigua Todos los dispositivos de usuario seleccionados para importar en este diálogo.
Todas las funciones de usuario se deben importar de un dispositivo; no es posible importar sólo una función.
En caso de conflictos, (un dispositivo o una función ya presente en la base de datos con el mismo nombre pero sin el mismo ID) no se importará el dispositivo y se mostrará un cuadro de mensaje.
La hoja de salida se utiliza para los mensajes que no se deben confirmar.
Consulte el capítulo "Solución de problemas" para obtener más información sobre los posibles conflictos y su solución.
Al final de la función de importación, se actualiza la ventana principal de la nueva base de datos.
Delete User Devices
El usuario puede eliminar los dispositivos de usuario.
El usuario debe seguir las instrucciones que aparecen a continuación para eliminar los dispositivos de usuario: Seleccione un dispositivo de usuario de una familia de dispositivos. Haga clic con el botón derecho del ratón para eliminarlo. Se mostrará un cuadro de mensaje que le solicitará confirmación; a continuación
haga clic en OK. Para guardar los cambios, haga clic en el botón ‘Build Catalog’.
35013947 04/2009 147
www.infoPLC.net
Cierre de Catalog Manager
Presentación
A continuación se muestra el procedimiento para cerrar Catalog Manager.
Procedimiento
En la tabla siguiente se muestra el procedimiento para cerrar Catalog Manager:
Paso Acción
1 Comprobar que se han guardado los cambios: Si hay cambios, hacer clic en ‘Build Catalog’.
Aparece una ventana en la que se muestra el progreso de la generación del catálogo.Una vez finalizada la generación, ir al paso siguiente.
Si no hay cambios, ir al paso siguiente.
2 Seleccionar File->Exit.O bienSeleccionar "Close" en la ventana principal.
148 35013947 04/2009
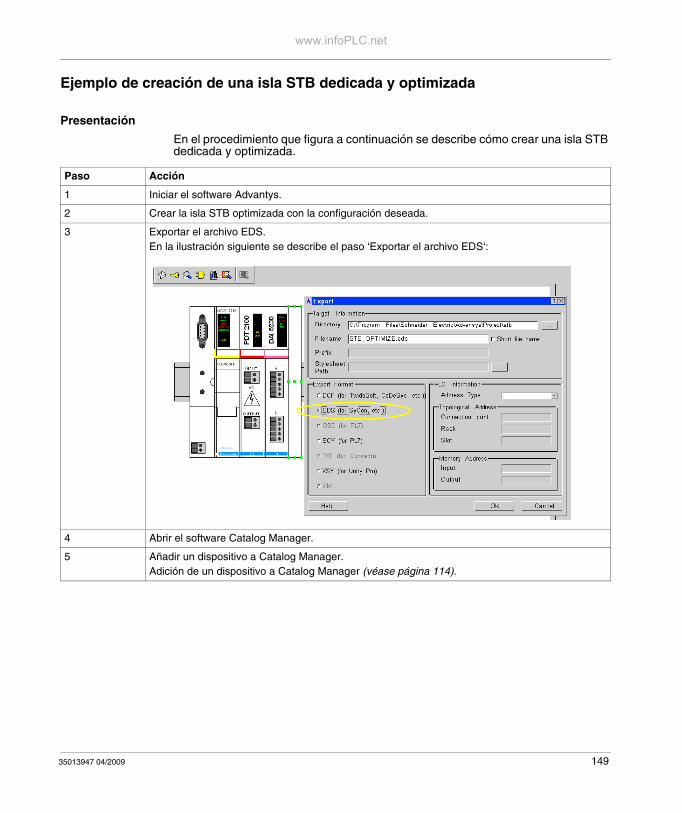
www.infoPLC.net
Ejemplo de creación de una isla STB dedicada y optimizada
Presentación
En el procedimiento que figura a continuación se describe cómo crear una isla STB dedicada y optimizada.
Paso Acción
1 Iniciar el software Advantys.
2 Crear la isla STB optimizada con la configuración deseada.
3 Exportar el archivo EDS.En la ilustración siguiente se describe el paso ‘Exportar el archivo EDS‘:
4 Abrir el software Catalog Manager.
5 Añadir un dispositivo a Catalog Manager.Adición de un dispositivo a Catalog Manager (véase página 114).
35013947 04/2009 149
www.infoPLC.net
5.3 Solución de problemas de Catalog Manager
Objetivo de esta sección
En esta sección se presenta la solución de problemas de Catalog Manager.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Solución de problemas 151
Descripción de los códigos de cancelación de SDO 155
Código de anomalía de importación de EDS 157
150 35013947 04/2009
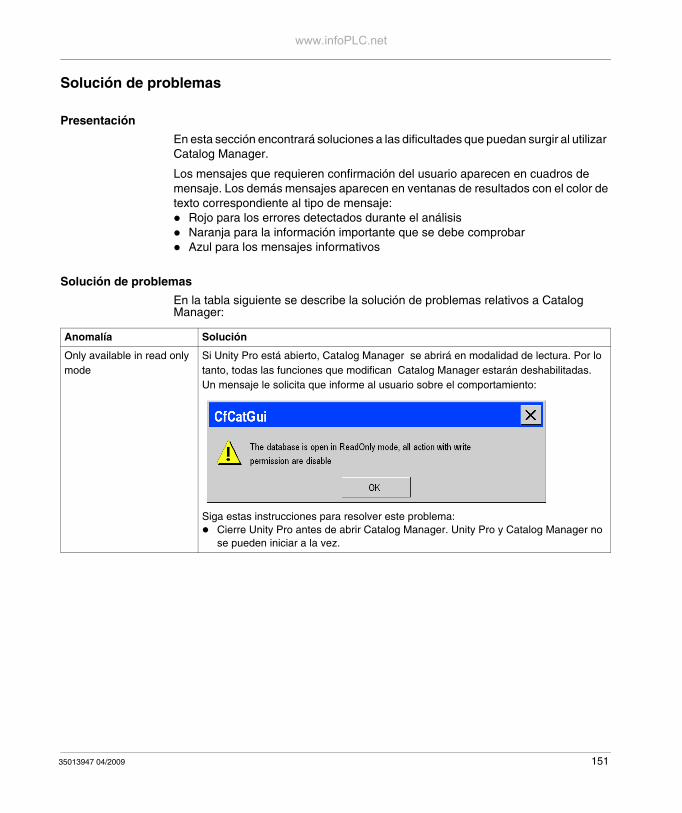
www.infoPLC.net
Solución de problemas
Presentación
En esta sección encontrará soluciones a las dificultades que puedan surgir al utilizar Catalog Manager.
Los mensajes que requieren confirmación del usuario aparecen en cuadros de mensaje. Los demás mensajes aparecen en ventanas de resultados con el color de texto correspondiente al tipo de mensaje: Rojo para los errores detectados durante el análisis Naranja para la información importante que se debe comprobar Azul para los mensajes informativos
Solución de problemas
En la tabla siguiente se describe la solución de problemas relativos a Catalog Manager:
Anomalía Solución
Only available in read only mode
Si Unity Pro está abierto, Catalog Manager se abrirá en modalidad de lectura. Por lo tanto, todas las funciones que modifican Catalog Manager estarán deshabilitadas. Un mensaje le solicita que informe al usuario sobre el comportamiento:
Siga estas instrucciones para resolver este problema: Cierre Unity Pro antes de abrir Catalog Manager. Unity Pro y Catalog Manager no
se pueden iniciar a la vez.
35013947 04/2009 151
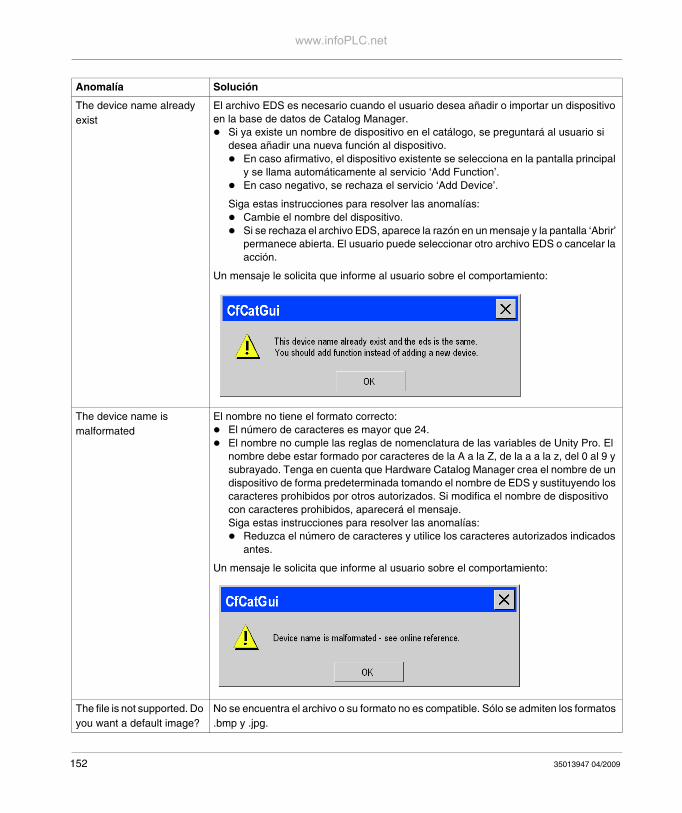
www.infoPLC.net
The device name already exist
El archivo EDS es necesario cuando el usuario desea añadir o importar un dispositivo en la base de datos de Catalog Manager. Si ya existe un nombre de dispositivo en el catálogo, se preguntará al usuario si
desea añadir una nueva función al dispositivo. En caso afirmativo, el dispositivo existente se selecciona en la pantalla principal
y se llama automáticamente al servicio ‘Add Function’. En caso negativo, se rechaza el servicio ‘Add Device’.
Siga estas instrucciones para resolver las anomalías: Cambie el nombre del dispositivo. Si se rechaza el archivo EDS, aparece la razón en un mensaje y la pantalla ‘Abrir’
permanece abierta. El usuario puede seleccionar otro archivo EDS o cancelar la acción.
Un mensaje le solicita que informe al usuario sobre el comportamiento:
The device name is malformated
El nombre no tiene el formato correcto: El número de caracteres es mayor que 24. El nombre no cumple las reglas de nomenclatura de las variables de Unity Pro. El
nombre debe estar formado por caracteres de la A a la Z, de la a a la z, del 0 al 9 y subrayado. Tenga en cuenta que Hardware Catalog Manager crea el nombre de un dispositivo de forma predeterminada tomando el nombre de EDS y sustituyendo los caracteres prohibidos por otros autorizados. Si modifica el nombre de dispositivo con caracteres prohibidos, aparecerá el mensaje.Siga estas instrucciones para resolver las anomalías: Reduzca el número de caracteres y utilice los caracteres autorizados indicados
antes.
Un mensaje le solicita que informe al usuario sobre el comportamiento:
The file is not supported. Do you want a default image?
No se encuentra el archivo o su formato no es compatible. Sólo se admiten los formatos .bmp y .jpg.
Anomalía Solución
152 35013947 04/2009
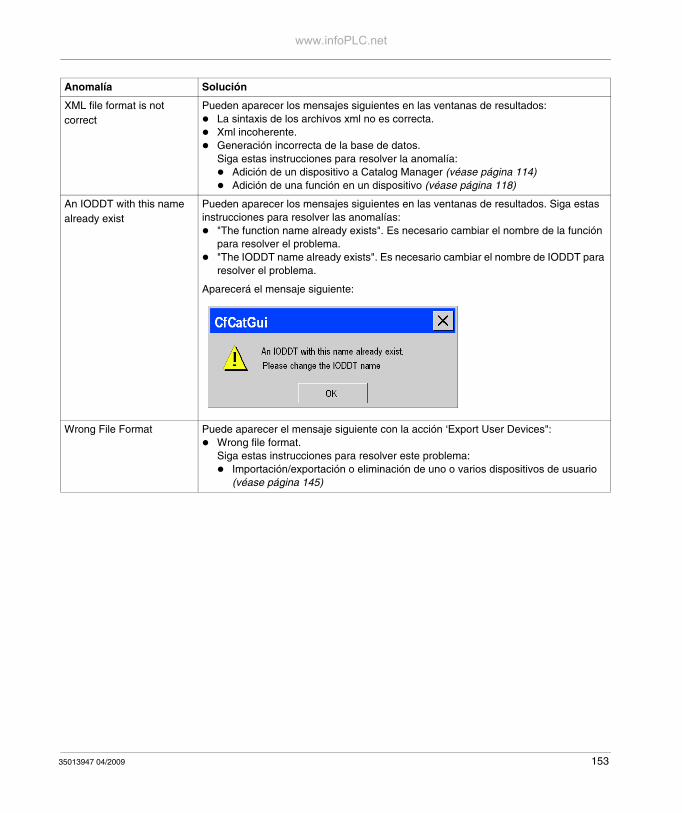
www.infoPLC.net
XML file format is not correct
Pueden aparecer los mensajes siguientes en las ventanas de resultados: La sintaxis de los archivos xml no es correcta. Xml incoherente. Generación incorrecta de la base de datos.
Siga estas instrucciones para resolver la anomalía: Adición de un dispositivo a Catalog Manager (véase página 114) Adición de una función en un dispositivo (véase página 118)
An IODDT with this name already exist
Pueden aparecer los mensajes siguientes en las ventanas de resultados. Siga estas instrucciones para resolver las anomalías: "The function name already exists". Es necesario cambiar el nombre de la función
para resolver el problema. "The IODDT name already exists". Es necesario cambiar el nombre de IODDT para
resolver el problema.
Aparecerá el mensaje siguiente:
Wrong File Format Puede aparecer el mensaje siguiente con la acción ‘Export User Devices": Wrong file format.
Siga estas instrucciones para resolver este problema: Importación/exportación o eliminación de uno o varios dispositivos de usuario
(véase página 145)
Anomalía Solución
35013947 04/2009 153
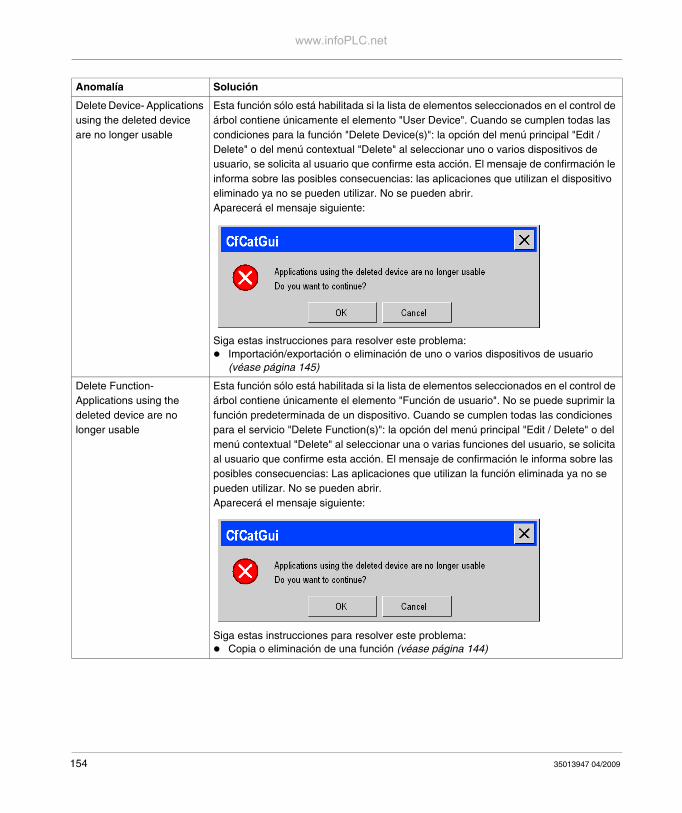
www.infoPLC.net
Delete Device- Applications using the deleted device are no longer usable
Esta función sólo está habilitada si la lista de elementos seleccionados en el control de árbol contiene únicamente el elemento "User Device". Cuando se cumplen todas las condiciones para la función "Delete Device(s)": la opción del menú principal "Edit / Delete" o del menú contextual "Delete" al seleccionar uno o varios dispositivos de usuario, se solicita al usuario que confirme esta acción. El mensaje de confirmación le informa sobre las posibles consecuencias: las aplicaciones que utilizan el dispositivo eliminado ya no se pueden utilizar. No se pueden abrir.Aparecerá el mensaje siguiente:
Siga estas instrucciones para resolver este problema: Importación/exportación o eliminación de uno o varios dispositivos de usuario
(véase página 145)
Delete Function- Applications using the deleted device are no longer usable
Esta función sólo está habilitada si la lista de elementos seleccionados en el control de árbol contiene únicamente el elemento "Función de usuario". No se puede suprimir la función predeterminada de un dispositivo. Cuando se cumplen todas las condiciones para el servicio "Delete Function(s)": la opción del menú principal "Edit / Delete" o del menú contextual "Delete" al seleccionar una o varias funciones del usuario, se solicita al usuario que confirme esta acción. El mensaje de confirmación le informa sobre las posibles consecuencias: Las aplicaciones que utilizan la función eliminada ya no se pueden utilizar. No se pueden abrir.Aparecerá el mensaje siguiente:
Siga estas instrucciones para resolver este problema: Copia o eliminación de una función (véase página 144)
Anomalía Solución
154 35013947 04/2009
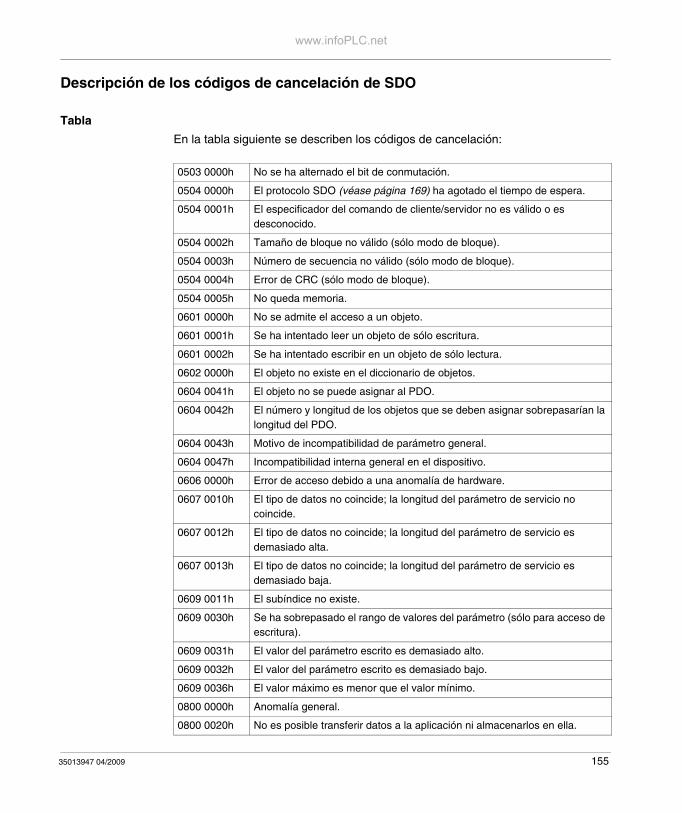
www.infoPLC.net
Descripción de los códigos de cancelación de SDO
Tabla
En la tabla siguiente se describen los códigos de cancelación:
0503 0000h No se ha alternado el bit de conmutación.
0504 0000h El protocolo SDO (véase página 169) ha agotado el tiempo de espera.
0504 0001h El especificador del comando de cliente/servidor no es válido o es desconocido.
0504 0002h Tamaño de bloque no válido (sólo modo de bloque).
0504 0003h Número de secuencia no válido (sólo modo de bloque).
0504 0004h Error de CRC (sólo modo de bloque).
0504 0005h No queda memoria.
0601 0000h No se admite el acceso a un objeto.
0601 0001h Se ha intentado leer un objeto de sólo escritura.
0601 0002h Se ha intentado escribir en un objeto de sólo lectura.
0602 0000h El objeto no existe en el diccionario de objetos.
0604 0041h El objeto no se puede asignar al PDO.
0604 0042h El número y longitud de los objetos que se deben asignar sobrepasarían la longitud del PDO.
0604 0043h Motivo de incompatibilidad de parámetro general.
0604 0047h Incompatibilidad interna general en el dispositivo.
0606 0000h Error de acceso debido a una anomalía de hardware.
0607 0010h El tipo de datos no coincide; la longitud del parámetro de servicio no coincide.
0607 0012h El tipo de datos no coincide; la longitud del parámetro de servicio es demasiado alta.
0607 0013h El tipo de datos no coincide; la longitud del parámetro de servicio es demasiado baja.
0609 0011h El subíndice no existe.
0609 0030h Se ha sobrepasado el rango de valores del parámetro (sólo para acceso de escritura).
0609 0031h El valor del parámetro escrito es demasiado alto.
0609 0032h El valor del parámetro escrito es demasiado bajo.
0609 0036h El valor máximo es menor que el valor mínimo.
0800 0000h Anomalía general.
0800 0020h No es posible transferir datos a la aplicación ni almacenarlos en ella.
35013947 04/2009 155
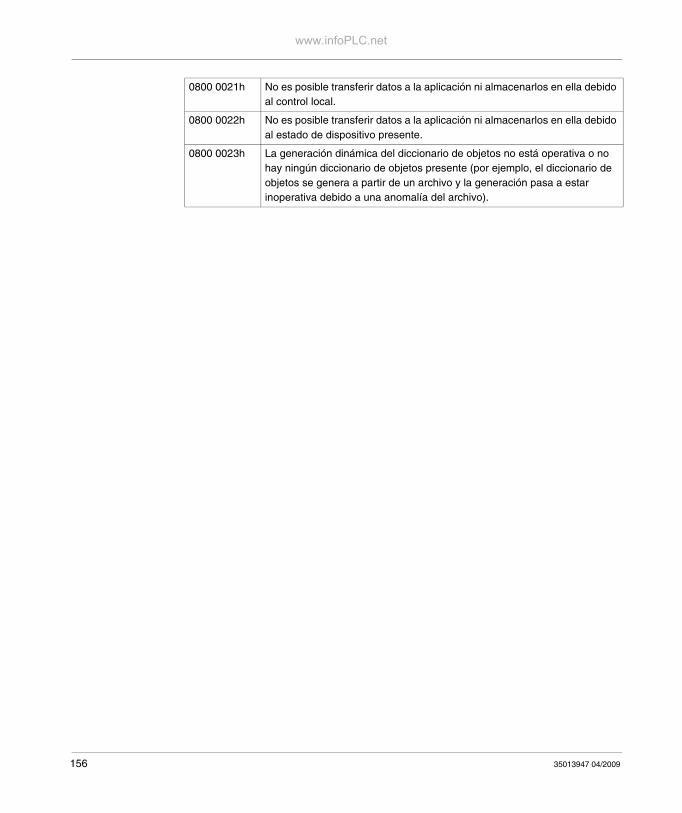
www.infoPLC.net
0800 0021h No es posible transferir datos a la aplicación ni almacenarlos en ella debido al control local.
0800 0022h No es posible transferir datos a la aplicación ni almacenarlos en ella debido al estado de dispositivo presente.
0800 0023h La generación dinámica del diccionario de objetos no está operativa o no hay ningún diccionario de objetos presente (por ejemplo, el diccionario de objetos se genera a partir de un archivo y la generación pasa a estar inoperativa debido a una anomalía del archivo).
156 35013947 04/2009
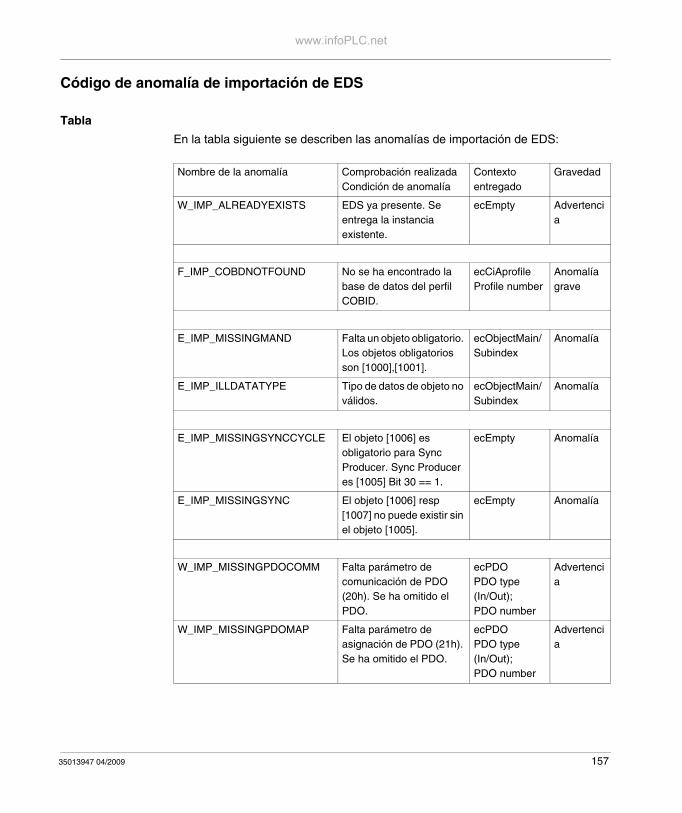
www.infoPLC.net
Código de anomalía de importación de EDS
Tabla
En la tabla siguiente se describen las anomalías de importación de EDS:
Nombre de la anomalía Comprobación realizadaCondición de anomalía
Contexto entregado
Gravedad
W_IMP_ALREADYEXISTS EDS ya presente. Se entrega la instancia existente.
ecEmpty Advertencia
F_IMP_COBDNOTFOUND No se ha encontrado la base de datos del perfil COBID.
ecCiAprofile Profile number
Anomalía grave
E_IMP_MISSINGMAND Falta un objeto obligatorio. Los objetos obligatorios son [1000],[1001].
ecObjectMain/Subindex
Anomalía
E_IMP_ILLDATATYPE Tipo de datos de objeto no válidos.
ecObjectMain/Subindex
Anomalía
E_IMP_MISSINGSYNCCYCLE El objeto [1006] es obligatorio para Sync Producer. Sync Producer es [1005] Bit 30 == 1.
ecEmpty Anomalía
E_IMP_MISSINGSYNC El objeto [1006] resp [1007] no puede existir sin el objeto [1005].
ecEmpty Anomalía
W_IMP_MISSINGPDOCOMM Falta parámetro de comunicación de PDO (20h). Se ha omitido el PDO.
ecPDO PDO type(In/Out); PDO number
Advertencia
W_IMP_MISSINGPDOMAP Falta parámetro de asignación de PDO (21h). Se ha omitido el PDO.
ecPDO PDO type(In/Out); PDO number
Advertencia
35013947 04/2009 157
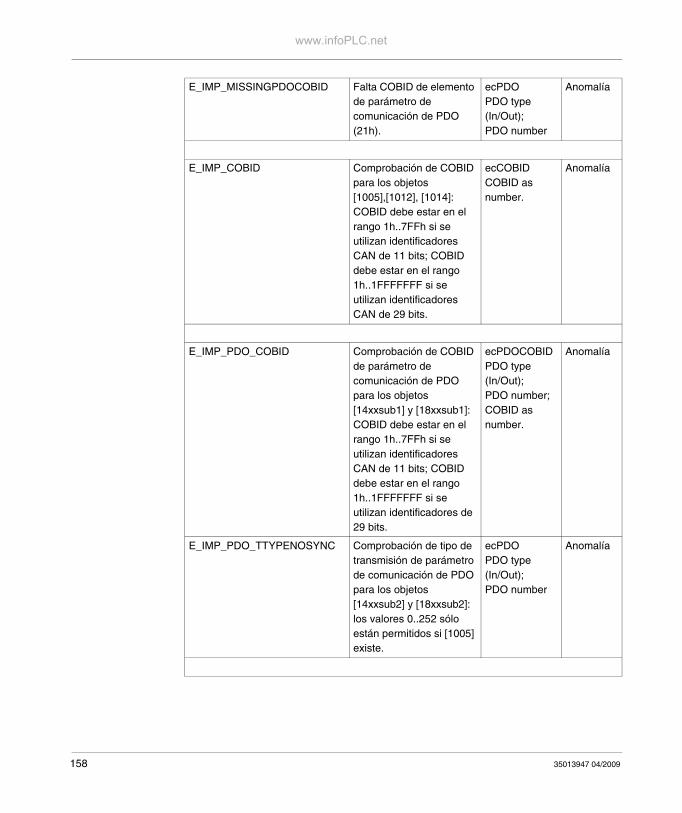
www.infoPLC.net
E_IMP_MISSINGPDOCOBID Falta COBID de elemento de parámetro de comunicación de PDO (21h).
ecPDO PDO type(In/Out); PDO number
Anomalía
E_IMP_COBID Comprobación de COBID para los objetos [1005],[1012], [1014]: COBID debe estar en el rango 1h..7FFh si se utilizan identificadores CAN de 11 bits; COBID debe estar en el rango 1h..1FFFFFFF si se utilizan identificadores CAN de 29 bits.
ecCOBID COBID as number.
Anomalía
E_IMP_PDO_COBID Comprobación de COBID de parámetro de comunicación de PDO para los objetos [14xxsub1] y [18xxsub1]: COBID debe estar en el rango 1h..7FFh si se utilizan identificadores CAN de 11 bits; COBID debe estar en el rango 1h..1FFFFFFF si se utilizan identificadores de 29 bits.
ecPDOCOBID PDO type(In/Out);PDO number;COBID as number.
Anomalía
E_IMP_PDO_TTYPENOSYNC Comprobación de tipo de transmisión de parámetro de comunicación de PDO para los objetos [14xxsub2] y [18xxsub2]: los valores 0..252 sólo están permitidos si [1005] existe.
ecPDO PDO type(In/Out);PDO number
Anomalía
158 35013947 04/2009
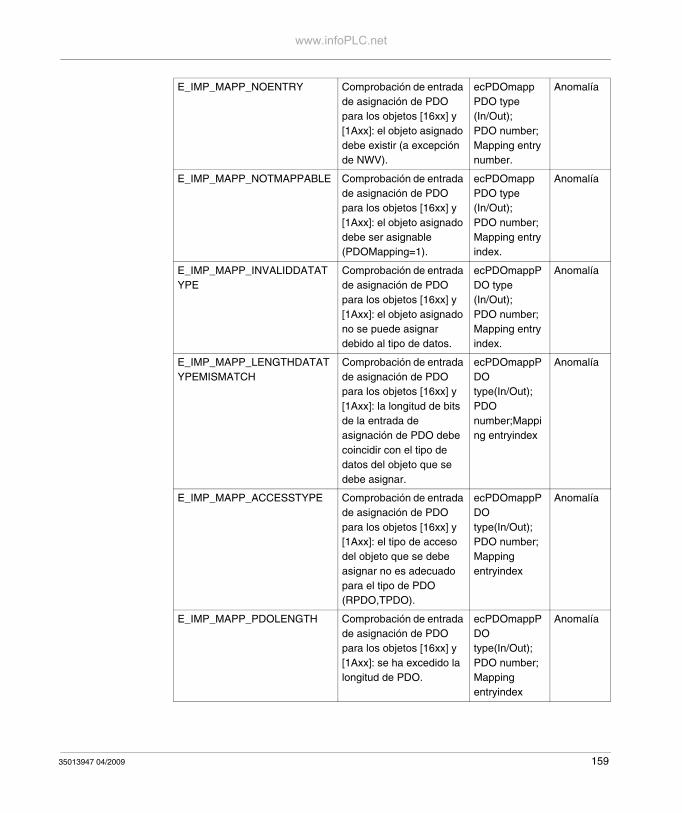
www.infoPLC.net
E_IMP_MAPP_NOENTRY Comprobación de entrada de asignación de PDO para los objetos [16xx] y [1Axx]: el objeto asignado debe existir (a excepción de NWV).
ecPDOmapp PDO type(In/Out);PDO number;Mapping entry number.
Anomalía
E_IMP_MAPP_NOTMAPPABLE Comprobación de entrada de asignación de PDO para los objetos [16xx] y [1Axx]: el objeto asignado debe ser asignable (PDOMapping=1).
ecPDOmapp PDO type(In/Out);PDO number;Mapping entry index.
Anomalía
E_IMP_MAPP_INVALIDDATATYPE
Comprobación de entrada de asignación de PDO para los objetos [16xx] y [1Axx]: el objeto asignado no se puede asignar debido al tipo de datos.
ecPDOmappPDO type (In/Out); PDO number;Mapping entry index.
Anomalía
E_IMP_MAPP_LENGTHDATATYPEMISMATCH
Comprobación de entrada de asignación de PDO para los objetos [16xx] y [1Axx]: la longitud de bits de la entrada de asignación de PDO debe coincidir con el tipo de datos del objeto que se debe asignar.
ecPDOmappPDO type(In/Out); PDO number;Mapping entryindex
Anomalía
E_IMP_MAPP_ACCESSTYPE Comprobación de entrada de asignación de PDO para los objetos [16xx] y [1Axx]: el tipo de acceso del objeto que se debe asignar no es adecuado para el tipo de PDO (RPDO,TPDO).
ecPDOmappPDO type(In/Out);PDO number;Mapping entryindex
Anomalía
E_IMP_MAPP_PDOLENGTH Comprobación de entrada de asignación de PDO para los objetos [16xx] y [1Axx]: se ha excedido la longitud de PDO.
ecPDOmappPDO type(In/Out);PDO number;Mapping entryindex
Anomalía
35013947 04/2009 159
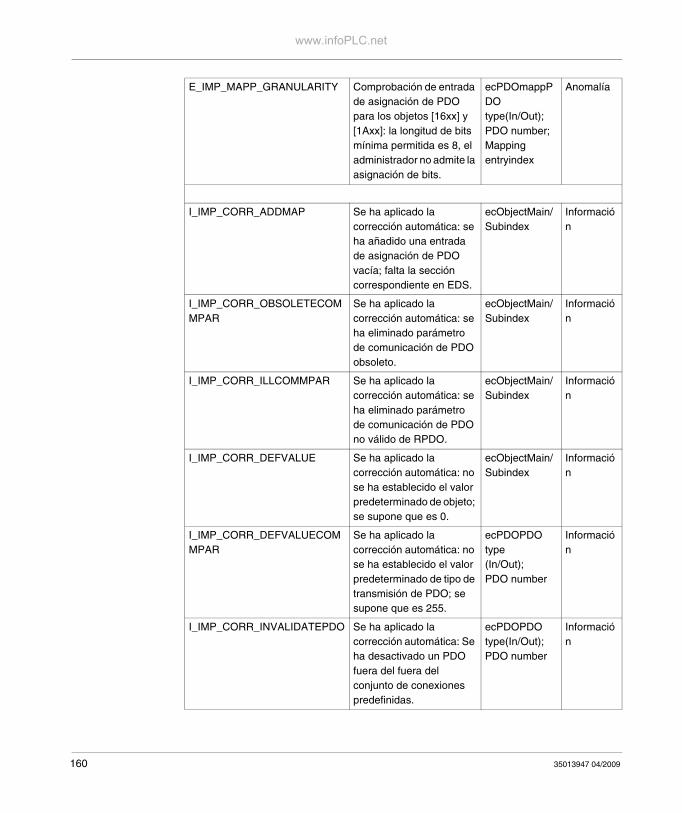
www.infoPLC.net
E_IMP_MAPP_GRANULARITY Comprobación de entrada de asignación de PDO para los objetos [16xx] y [1Axx]: la longitud de bits mínima permitida es 8, el administrador no admite la asignación de bits.
ecPDOmappPDO type(In/Out); PDO number;Mapping entryindex
Anomalía
I_IMP_CORR_ADDMAP Se ha aplicado la corrección automática: se ha añadido una entrada de asignación de PDO vacía; falta la sección correspondiente en EDS.
ecObjectMain/Subindex
Información
I_IMP_CORR_OBSOLETECOMMPAR
Se ha aplicado la corrección automática: se ha eliminado parámetro de comunicación de PDO obsoleto.
ecObjectMain/Subindex
Información
I_IMP_CORR_ILLCOMMPAR Se ha aplicado la corrección automática: se ha eliminado parámetro de comunicación de PDO no válido de RPDO.
ecObjectMain/Subindex
Información
I_IMP_CORR_DEFVALUE Se ha aplicado la corrección automática: no se ha establecido el valor predeterminado de objeto; se supone que es 0.
ecObjectMain/Subindex
Información
I_IMP_CORR_DEFVALUECOMMPAR
Se ha aplicado la corrección automática: no se ha establecido el valor predeterminado de tipo de transmisión de PDO; se supone que es 255.
ecPDOPDO type(In/Out); PDO number
Información
I_IMP_CORR_INVALIDATEPDO Se ha aplicado la corrección automática: Se ha desactivado un PDO fuera del fuera del conjunto de conexiones predefinidas.
ecPDOPDO type(In/Out); PDO number
Información
160 35013947 04/2009

www.infoPLC.net
35013947 04/2009 161

162 35013947 04/2009
www.infoPLC.net
35013947 04/2009
6
Programación
35013947 04/2009
www.infoPLC.net
Programación
Introducción
En esta sección se describe la programación de una arquitectura CANopen.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Intercambios mediante PDO 164
Intercambios mediante SDO 169
Ejemplo de funciones de comunicación 172
Ejemplo de petición Modbus 178
163
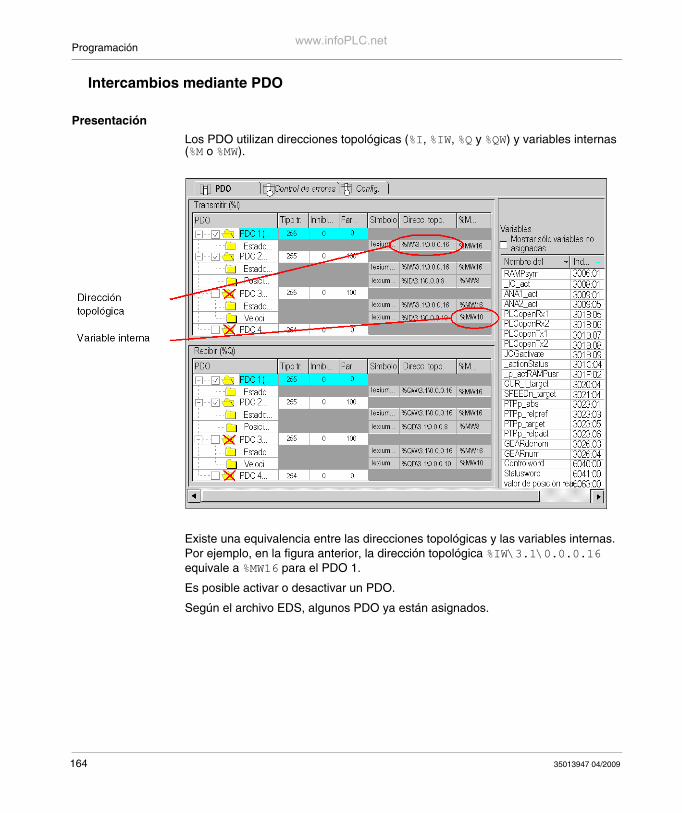
Programaciónwww.infoPLC.net
Intercambios mediante PDO
Presentación
Los PDO utilizan direcciones topológicas (%I, %IW, %Q y %QW) y variables internas (%M o %MW).
Existe una equivalencia entre las direcciones topológicas y las variables internas. Por ejemplo, en la figura anterior, la dirección topológica %IW\3.1\0.0.0.16 equivale a %MW16 para el PDO 1.
Es posible activar o desactivar un PDO.
Según el archivo EDS, algunos PDO ya están asignados.
164 35013947 04/2009
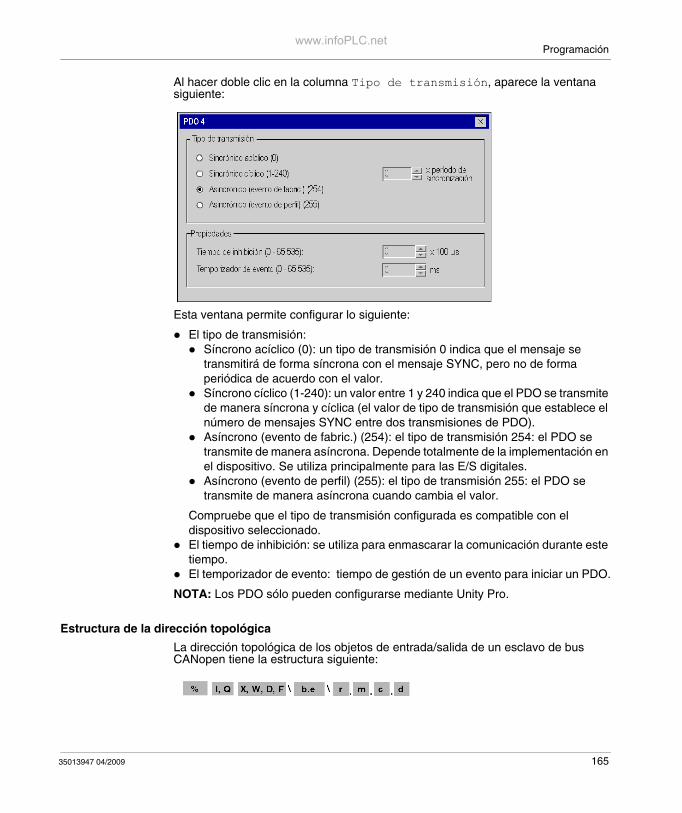
Programaciónwww.infoPLC.net
Al hacer doble clic en la columna Tipo de transmisión, aparece la ventana siguiente:
Esta ventana permite configurar lo siguiente:
El tipo de transmisión: Síncrono acíclico (0): un tipo de transmisión 0 indica que el mensaje se
transmitirá de forma síncrona con el mensaje SYNC, pero no de forma periódica de acuerdo con el valor.
Síncrono cíclico (1-240): un valor entre 1 y 240 indica que el PDO se transmite de manera síncrona y cíclica (el valor de tipo de transmisión que establece el número de mensajes SYNC entre dos transmisiones de PDO).
Asíncrono (evento de fabric.) (254): el tipo de transmisión 254: el PDO se transmite de manera asíncrona. Depende totalmente de la implementación en el dispositivo. Se utiliza principalmente para las E/S digitales.
Asíncrono (evento de perfil) (255): el tipo de transmisión 255: el PDO se transmite de manera asíncrona cuando cambia el valor.
Compruebe que el tipo de transmisión configurada es compatible con el dispositivo seleccionado.
El tiempo de inhibición: se utiliza para enmascarar la comunicación durante este tiempo.
El temporizador de evento: tiempo de gestión de un evento para iniciar un PDO.
NOTA: Los PDO sólo pueden configurarse mediante Unity Pro.
Estructura de la dirección topológica
La dirección topológica de los objetos de entrada/salida de un esclavo de bus CANopen tiene la estructura siguiente:
35013947 04/2009 165
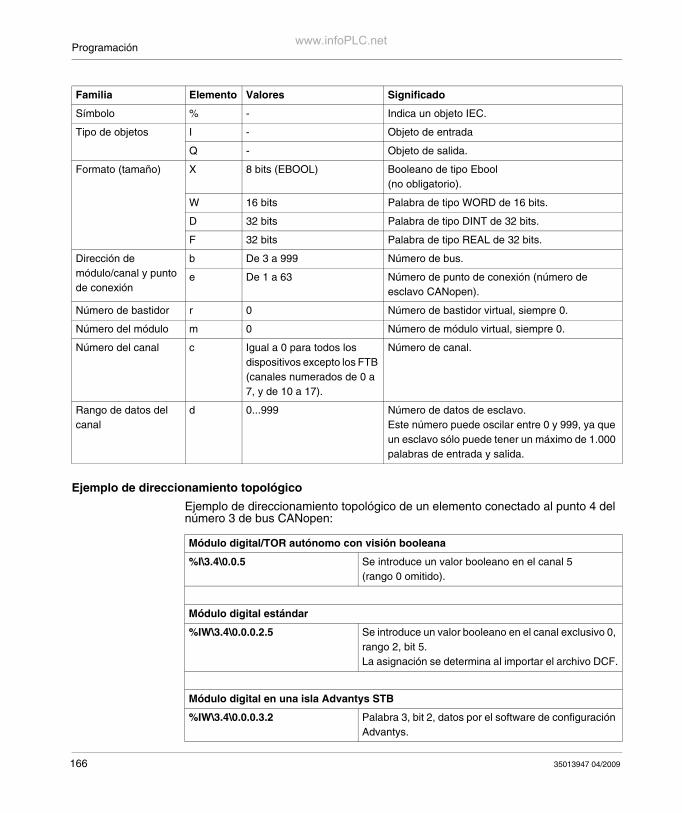
Programaciónwww.infoPLC.net
Ejemplo de direccionamiento topológico
Ejemplo de direccionamiento topológico de un elemento conectado al punto 4 del número 3 de bus CANopen:
Familia Elemento Valores Significado
Símbolo % - Indica un objeto IEC.
Tipo de objetos I - Objeto de entrada
Q - Objeto de salida.
Formato (tamaño) X 8 bits (EBOOL) Booleano de tipo Ebool(no obligatorio).
W 16 bits Palabra de tipo WORD de 16 bits.
D 32 bits Palabra de tipo DINT de 32 bits.
F 32 bits Palabra de tipo REAL de 32 bits.
Dirección de módulo/canal y punto de conexión
b De 3 a 999 Número de bus.
e De 1 a 63 Número de punto de conexión (número de esclavo CANopen).
Número de bastidor r 0 Número de bastidor virtual, siempre 0.
Número del módulo m 0 Número de módulo virtual, siempre 0.
Número del canal c Igual a 0 para todos los dispositivos excepto los FTB (canales numerados de 0 a 7, y de 10 a 17).
Número de canal.
Rango de datos del canal
d 0...999 Número de datos de esclavo.Este número puede oscilar entre 0 y 999, ya que un esclavo sólo puede tener un máximo de 1.000 palabras de entrada y salida.
Módulo digital/TOR autónomo con visión booleana
%I\3.4\0.0.5 Se introduce un valor booleano en el canal 5(rango 0 omitido).
Módulo digital estándar
%IW\3.4\0.0.0.2.5 Se introduce un valor booleano en el canal exclusivo 0, rango 2, bit 5.La asignación se determina al importar el archivo DCF.
Módulo digital en una isla Advantys STB
%IW\3.4\0.0.0.3.2 Palabra 3, bit 2, datos por el software de configuración Advantys.
166 35013947 04/2009
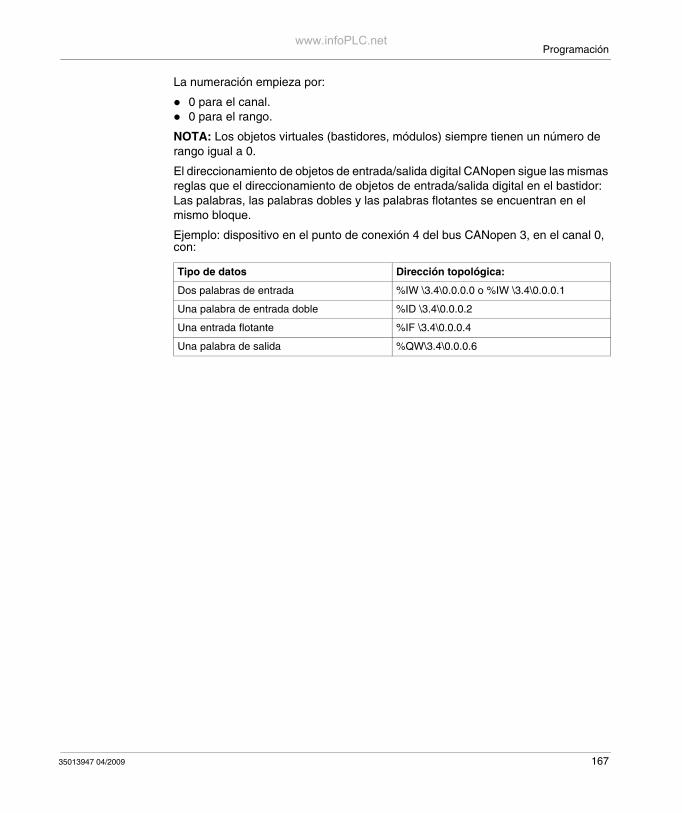
Programaciónwww.infoPLC.net
La numeración empieza por:
0 para el canal. 0 para el rango.
NOTA: Los objetos virtuales (bastidores, módulos) siempre tienen un número de rango igual a 0.
El direccionamiento de objetos de entrada/salida digital CANopen sigue las mismas reglas que el direccionamiento de objetos de entrada/salida digital en el bastidor: Las palabras, las palabras dobles y las palabras flotantes se encuentran en el mismo bloque.
Ejemplo: dispositivo en el punto de conexión 4 del bus CANopen 3, en el canal 0, con:
Tipo de datos Dirección topológica:
Dos palabras de entrada %IW \3.4\0.0.0.0 o %IW \3.4\0.0.0.1
Una palabra de entrada doble %ID \3.4\0.0.0.2
Una entrada flotante %IF \3.4\0.0.0.4
Una palabra de salida %QW\3.4\0.0.0.6
35013947 04/2009 167
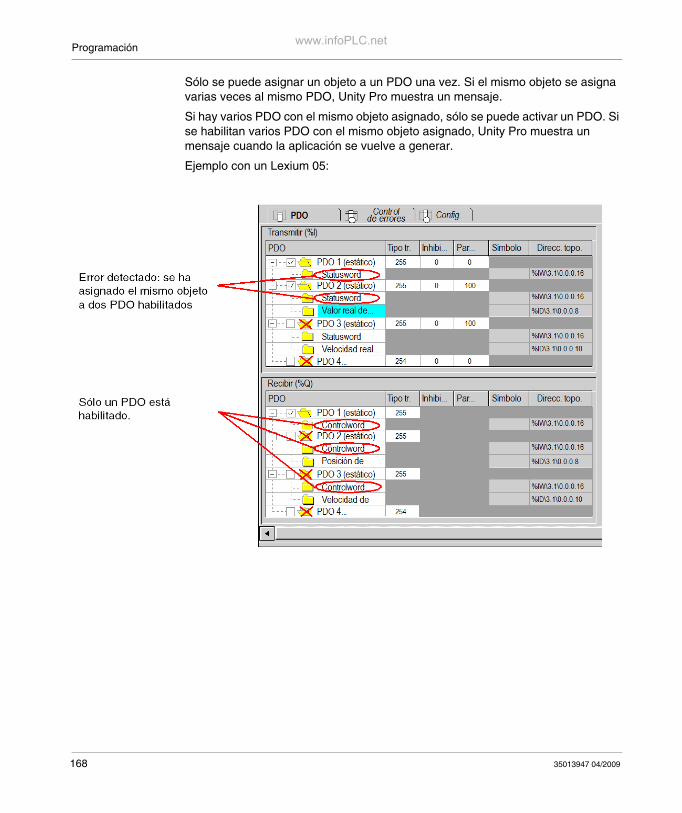
Programaciónwww.infoPLC.net
Sólo se puede asignar un objeto a un PDO una vez. Si el mismo objeto se asigna varias veces al mismo PDO, Unity Pro muestra un mensaje.
Si hay varios PDO con el mismo objeto asignado, sólo se puede activar un PDO. Si se habilitan varios PDO con el mismo objeto asignado, Unity Pro muestra un mensaje cuando la aplicación se vuelve a generar.
Ejemplo con un Lexium 05:
168 35013947 04/2009
Programaciónwww.infoPLC.net
Intercambios mediante SDO
Presentación
El intercambio explícito de mensajes en un bus CANopen se realiza a través del protocolo de lectura/escritura SDO.
Existen tres métodos de acceso a SDO:
Mediante las funciones de comunicación READ_VAR y WRITE_VAR Mediante la pantalla de depuración de Unity Pro Mediante la petición Modbus FC43/0xD
Funciones de comunicación
Es posible acceder a SDO mediante las funciones de comunicación READ_VAR y WRITE_VAR.
NOTA: Es posible enviar un máximo de 16 variables READ_VAR/WRITE_VAR simultáneamente. Se ejecuta una tarea de consulta cada 5 ms y en cada ciclo de tarea para comprobar la finalización del intercambio. Esto es útil si el usuario ejecuta muchos SDO durante un ciclo de tarea.
Para obtener más información sobre el uso de la función de comunicación, consulte Ejemplo de funciones de comunicación, página 172.
NOTA: El cambio de salidas de un dispositivo con un SDO de escritura no tiene efecto sobre %QW.
Unity Pro
Los objetos SDO permiten acceder a las variables.
En modalidad en línea, la pantalla CANopen (consulte Diagnósticos de esclavos, página 197) permite acceder a:
Distintos objetos de dispositivo en modalidad de lectura/escritura (sólo mediante un cuadro de lista).
Descripción de las variables. Repetición de comunicaciones. IODDT admitido (sólo T_COM_CO_BMX y T_COM_CO_BMX_ EXPERT).
ADVERTENCIAFUNCIONAMIENTOINESPERADO DEL EQUIPO
Al modificar una variable, compruebe las consecuencias del comando SDO en la documentación del dispositivo CANopen específico de destino.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
35013947 04/2009 169
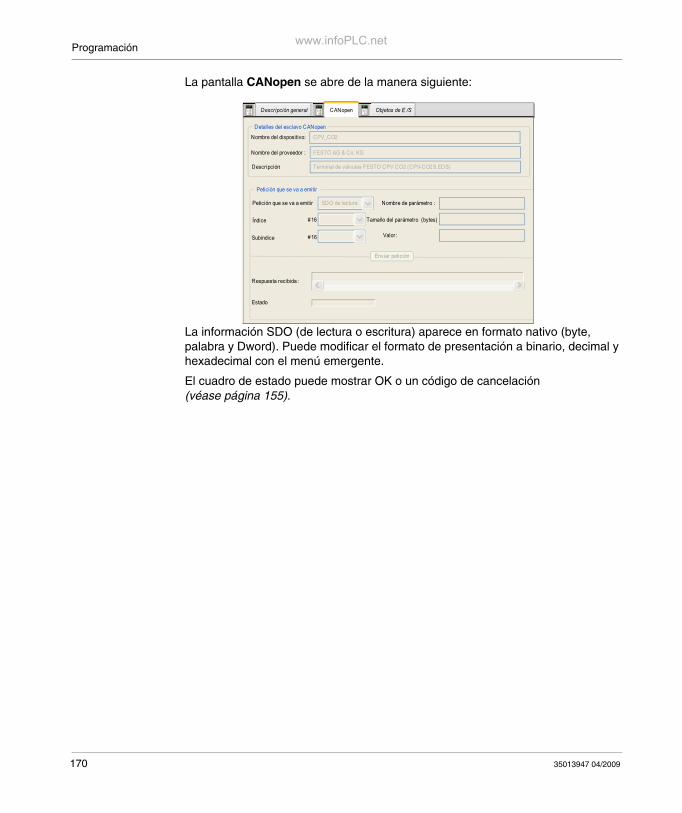
Programaciónwww.infoPLC.net
La pantalla CANopen se abre de la manera siguiente:
La información SDO (de lectura o escritura) aparece en formato nativo (byte, palabra y Dword). Puede modificar el formato de presentación a binario, decimal y hexadecimal con el menú emergente.
El cuadro de estado puede mostrar OK o un código de cancelación (véase página 155).
Estado
Detalles del esclavo CANopen
CPV_CO2
FESTO AG & Co. KG
Terminal de válvulas FESTO CPV CO2 (CPV-CO2S.EDS)
Nombre del dispositivo:
Nombre del proveedor :
Descripción:
Petición que se va a emitir
SDO de lectura
Enviar petición
Petición que se va a emitir
Subíndice
Índice
Nombre de parámetro :
Tamaño del parámetro (bytes)
Valor:
Respuesta recibida :
Descripción general Objetos de E /S
Estado
CANopen
#16
#16
170 35013947 04/2009
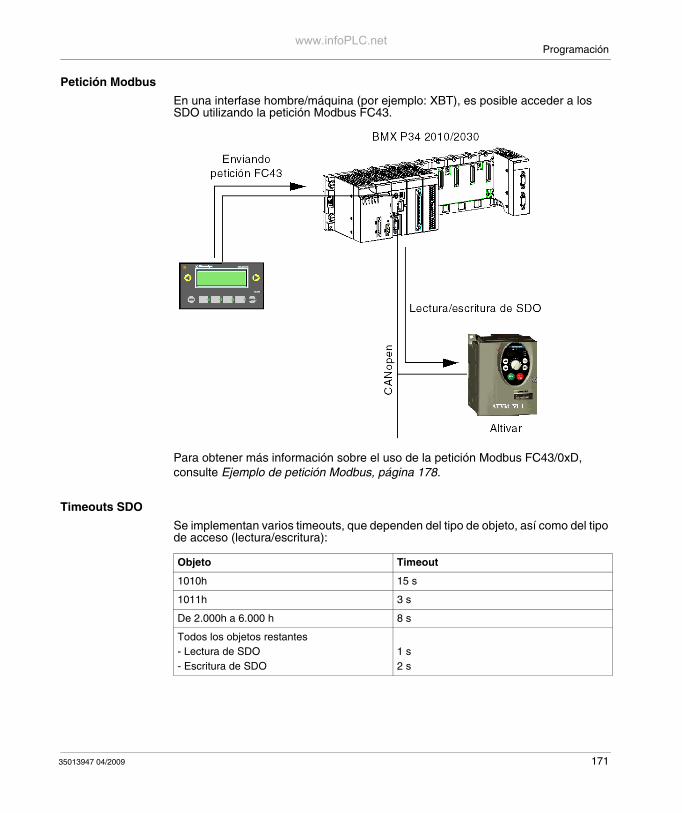
Programaciónwww.infoPLC.net
Petición Modbus
En una interfase hombre/máquina (por ejemplo: XBT), es posible acceder a los SDO utilizando la petición Modbus FC43.
Para obtener más información sobre el uso de la petición Modbus FC43/0xD, consulte Ejemplo de petición Modbus, página 178.
Timeouts SDO
Se implementan varios timeouts, que dependen del tipo de objeto, así como del tipo de acceso (lectura/escritura):
Objeto Timeout
1010h 15 s
1011h 3 s
De 2.000h a 6.000 h 8 s
Todos los objetos restantes- Lectura de SDO- Escritura de SDO
1 s2 s
35013947 04/2009 171
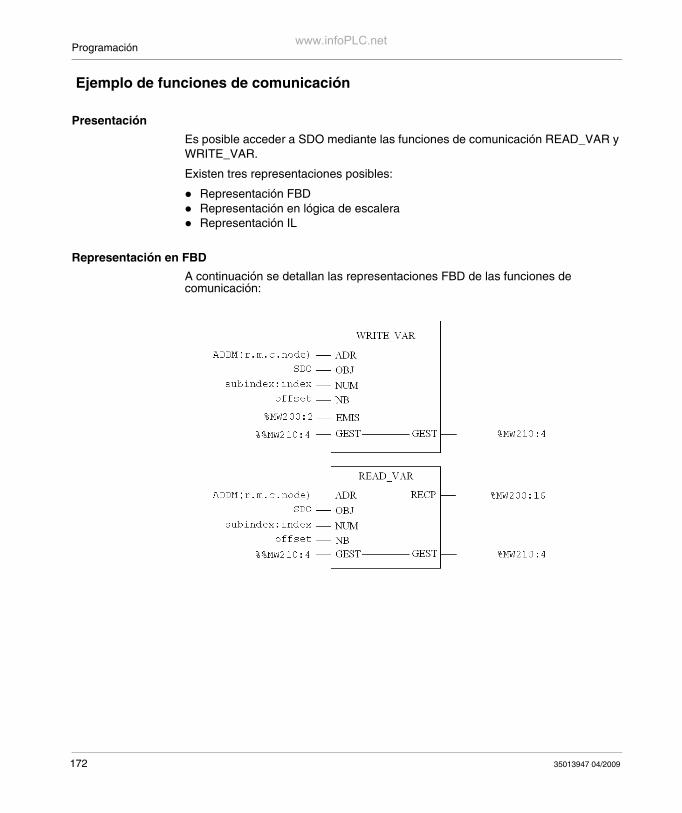
Programaciónwww.infoPLC.net
Ejemplo de funciones de comunicación
Presentación
Es posible acceder a SDO mediante las funciones de comunicación READ_VAR y WRITE_VAR.
Existen tres representaciones posibles:
Representación FBD Representación en lógica de escalera Representación IL
Representación en FBD
A continuación se detallan las representaciones FBD de las funciones de comunicación:
172 35013947 04/2009
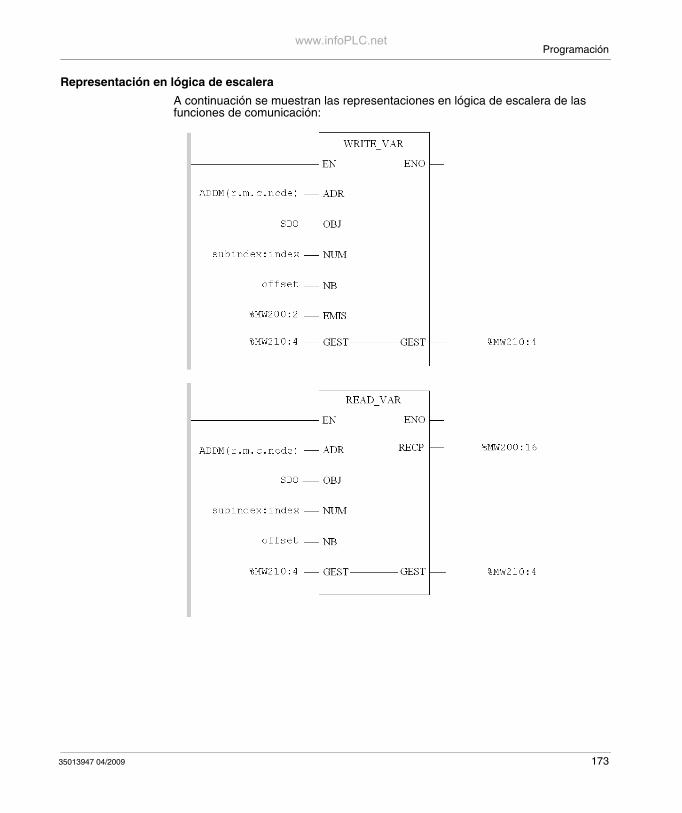
Programaciónwww.infoPLC.net
Representación en lógica de escalera
A continuación se muestran las representaciones en lógica de escalera de las funciones de comunicación:
35013947 04/2009 173
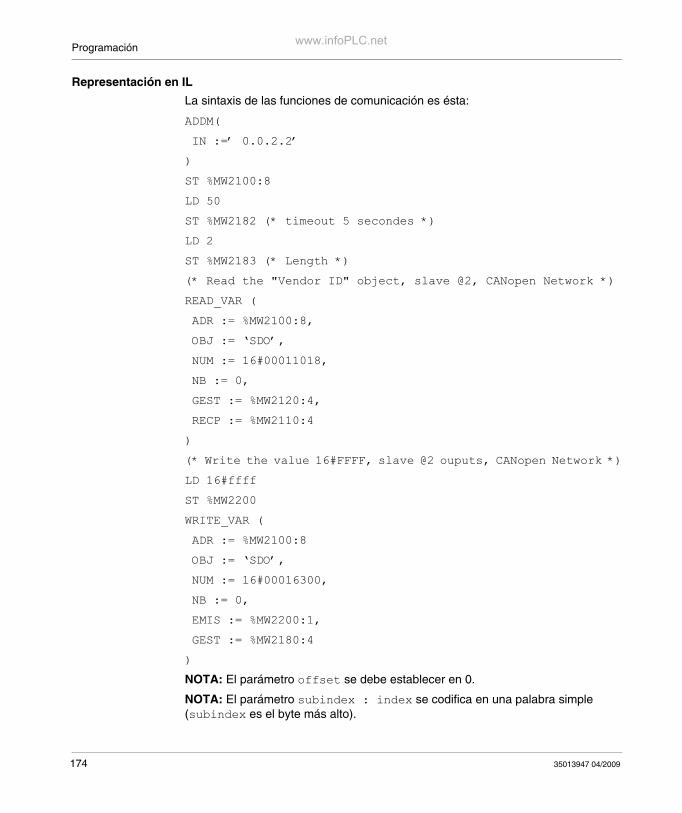
Programaciónwww.infoPLC.net
Representación en IL
La sintaxis de las funciones de comunicación es ésta:
ADDM(
IN :=’ 0.0.2.2’
)
ST %MW2100:8
LD 50
ST %MW2182 (* timeout 5 secondes *)
LD 2
ST %MW2183 (* Length *)
(* Read the "Vendor ID" object, slave @2, CANopen Network *)
READ_VAR (
ADR := %MW2100:8,
OBJ := ‘SDO’,
NUM := 16#00011018,
NB := 0,
GEST := %MW2120:4,
RECP := %MW2110:4
)
(* Write the value 16#FFFF, slave @2 ouputs, CANopen Network *)
LD 16#ffff
ST %MW2200
WRITE_VAR (
ADR := %MW2100:8
OBJ := ‘SDO’,
NUM := 16#00016300,
NB := 0,
EMIS := %MW2200:1,
GEST := %MW2180:4
)
NOTA: El parámetro offset se debe establecer en 0.
NOTA: El parámetro subindex : index se codifica en una palabra simple (subindex es el byte más alto).
174 35013947 04/2009
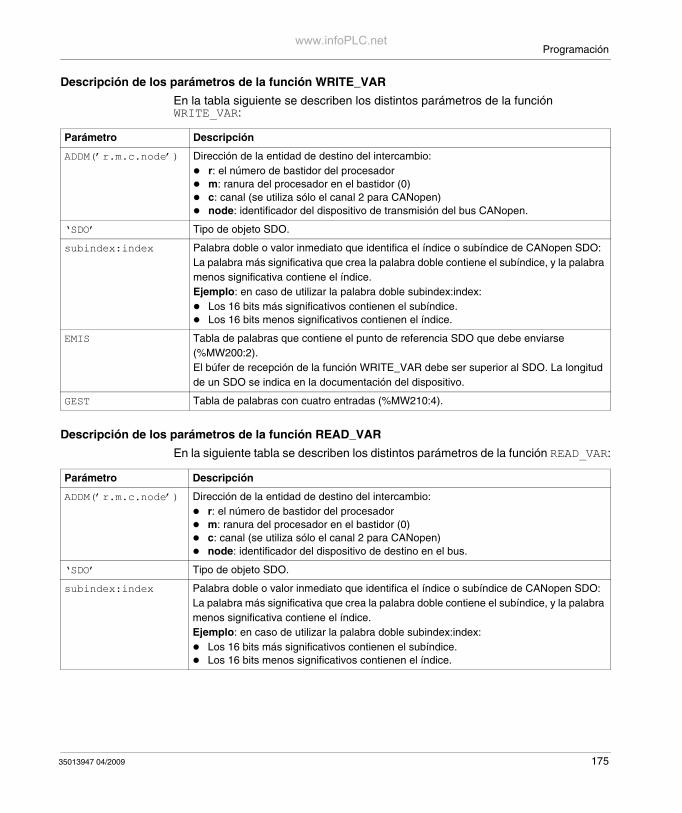
Programaciónwww.infoPLC.net
Descripción de los parámetros de la función WRITE_VAR
En la tabla siguiente se describen los distintos parámetros de la función WRITE_VAR:
Descripción de los parámetros de la función READ_VAR
En la siguiente tabla se describen los distintos parámetros de la función READ_VAR:
Parámetro Descripción
ADDM(’r.m.c.node’) Dirección de la entidad de destino del intercambio: r: el número de bastidor del procesador m: ranura del procesador en el bastidor (0) c: canal (se utiliza sólo el canal 2 para CANopen) node: identificador del dispositivo de transmisión del bus CANopen.
‘SDO’ Tipo de objeto SDO.
subindex:index Palabra doble o valor inmediato que identifica el índice o subíndice de CANopen SDO:La palabra más significativa que crea la palabra doble contiene el subíndice, y la palabra menos significativa contiene el índice.Ejemplo: en caso de utilizar la palabra doble subindex:index: Los 16 bits más significativos contienen el subíndice. Los 16 bits menos significativos contienen el índice.
EMIS Tabla de palabras que contiene el punto de referencia SDO que debe enviarse (%MW200:2).El búfer de recepción de la función WRITE_VAR debe ser superior al SDO. La longitud de un SDO se indica en la documentación del dispositivo.
GEST Tabla de palabras con cuatro entradas (%MW210:4).
Parámetro Descripción
ADDM(’r.m.c.node’) Dirección de la entidad de destino del intercambio: r: el número de bastidor del procesador m: ranura del procesador en el bastidor (0) c: canal (se utiliza sólo el canal 2 para CANopen) node: identificador del dispositivo de destino en el bus.
‘SDO’ Tipo de objeto SDO.
subindex:index Palabra doble o valor inmediato que identifica el índice o subíndice de CANopen SDO:La palabra más significativa que crea la palabra doble contiene el subíndice, y la palabra menos significativa contiene el índice.Ejemplo: en caso de utilizar la palabra doble subindex:index: Los 16 bits más significativos contienen el subíndice. Los 16 bits menos significativos contienen el índice.
35013947 04/2009 175
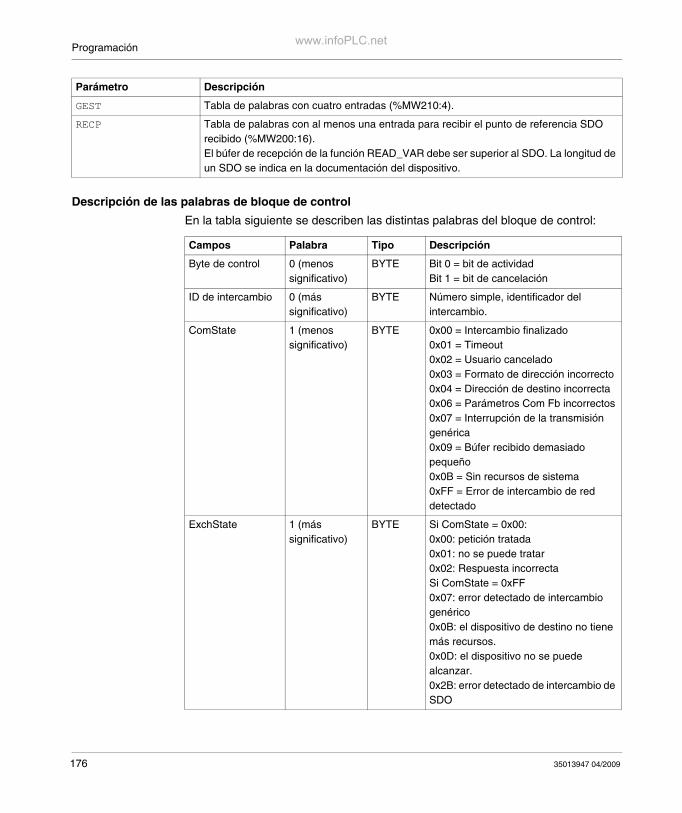
Programaciónwww.infoPLC.net
Descripción de las palabras de bloque de control
En la tabla siguiente se describen las distintas palabras del bloque de control:
GEST Tabla de palabras con cuatro entradas (%MW210:4).
RECP Tabla de palabras con al menos una entrada para recibir el punto de referencia SDO recibido (%MW200:16).El búfer de recepción de la función READ_VAR debe ser superior al SDO. La longitud de un SDO se indica en la documentación del dispositivo.
Parámetro Descripción
Campos Palabra Tipo Descripción
Byte de control 0 (menos significativo)
BYTE Bit 0 = bit de actividadBit 1 = bit de cancelación
ID de intercambio 0 (más significativo)
BYTE Número simple, identificador del intercambio.
ComState 1 (menos significativo)
BYTE 0x00 = Intercambio finalizado0x01 = Timeout0x02 = Usuario cancelado0x03 = Formato de dirección incorrecto0x04 = Dirección de destino incorrecta0x06 = Parámetros Com Fb incorrectos0x07 = Interrupción de la transmisión genérica0x09 = Búfer recibido demasiado pequeño0x0B = Sin recursos de sistema0xFF = Error de intercambio de red detectado
ExchState 1 (más significativo)
BYTE Si ComState = 0x00: 0x00: petición tratada0x01: no se puede tratar0x02: Respuesta incorrectaSi ComState = 0xFF0x07: error detectado de intercambio genérico0x0B: el dispositivo de destino no tiene más recursos.0x0D: el dispositivo no se puede alcanzar.0x2B: error detectado de intercambio de SDO
176 35013947 04/2009
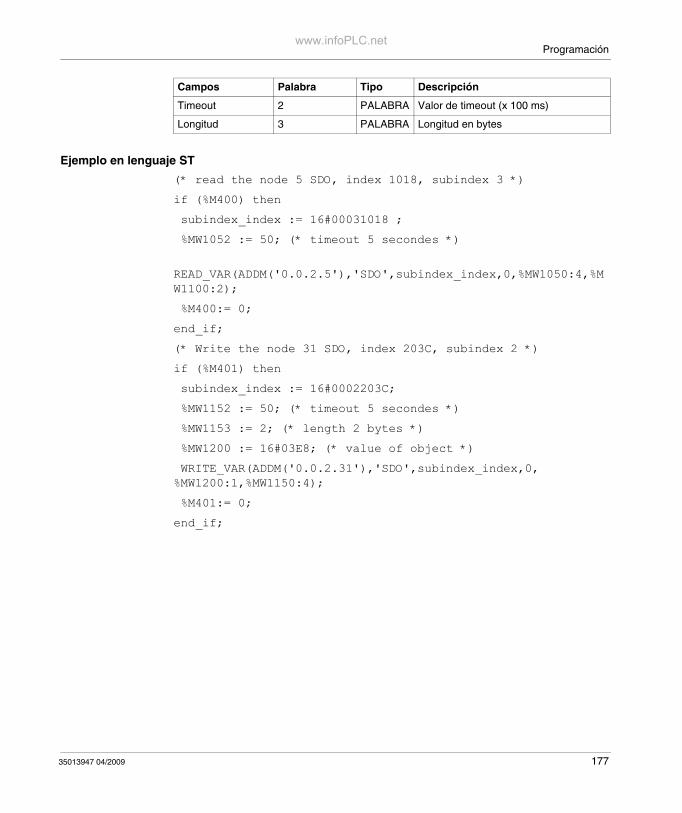
Programaciónwww.infoPLC.net
Ejemplo en lenguaje ST
(* read the node 5 SDO, index 1018, subindex 3 *)
if (%M400) then
subindex_index := 16#00031018 ;
%MW1052 := 50; (* timeout 5 secondes *)
READ_VAR(ADDM('0.0.2.5'),'SDO',subindex_index,0,%MW1050:4,%MW1100:2);
%M400:= 0;
end_if;
(* Write the node 31 SDO, index 203C, subindex 2 *)
if (%M401) then
subindex_index := 16#0002203C;
%MW1152 := 50; (* timeout 5 secondes *)
%MW1153 := 2; (* length 2 bytes *)
%MW1200 := 16#03E8; (* value of object *)
WRITE_VAR(ADDM('0.0.2.31'),'SDO',subindex_index,0, %MW1200:1,%MW1150:4);
%M401:= 0;
end_if;
Timeout 2 PALABRA Valor de timeout (x 100 ms)
Longitud 3 PALABRA Longitud en bytes
Campos Palabra Tipo Descripción
35013947 04/2009 177
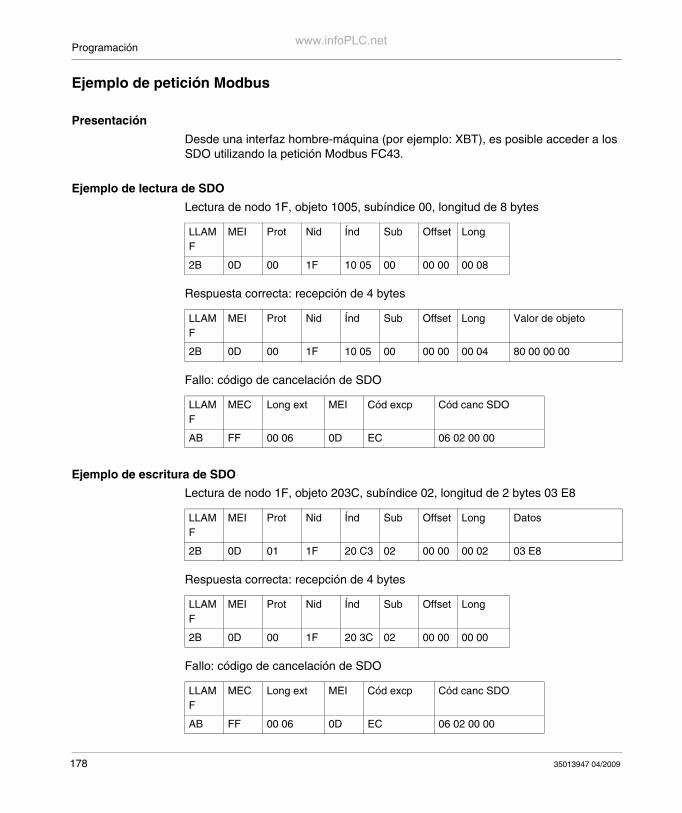
Programaciónwww.infoPLC.net
Ejemplo de petición Modbus
Presentación
Desde una interfaz hombre-máquina (por ejemplo: XBT), es posible acceder a los SDO utilizando la petición Modbus FC43.
Ejemplo de lectura de SDO
Lectura de nodo 1F, objeto 1005, subíndice 00, longitud de 8 bytes
Respuesta correcta: recepción de 4 bytes
Fallo: código de cancelación de SDO
Ejemplo de escritura de SDO
Lectura de nodo 1F, objeto 203C, subíndice 02, longitud de 2 bytes 03 E8
Respuesta correcta: recepción de 4 bytes
Fallo: código de cancelación de SDO
LLAM F
MEI Prot Nid Índ Sub Offset Long
2B 0D 00 1F 10 05 00 00 00 00 08
LLAM F
MEI Prot Nid Índ Sub Offset Long Valor de objeto
2B 0D 00 1F 10 05 00 00 00 00 04 80 00 00 00
LLAM F
MEC Long ext MEI Cód excp Cód canc SDO
AB FF 00 06 0D EC 06 02 00 00
LLAM F
MEI Prot Nid Índ Sub Offset Long Datos
2B 0D 01 1F 20 C3 02 00 00 00 02 03 E8
LLAM F
MEI Prot Nid Índ Sub Offset Long
2B 0D 00 1F 20 3C 02 00 00 00 00
LLAM F
MEC Long ext MEI Cód excp Cód canc SDO
AB FF 00 06 0D EC 06 02 00 00
178 35013947 04/2009
35013947 04/2009
7
Depuración CANopen
35013947 04/2009
www.infoPLC.net
Depuración de la comunicación en el bus CANopen
Objetivo
En este capítulo se presenta el procedimiento de depuración del maestro y los esclavos de bus CANopen.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Acceder a las pantallas de depuración de dispositivos remotos 180
Pantalla de depuración del maestro CANopen para las CPU 2010/2030 181
Pantalla de depuración del maestro CANopen para las CPU 20102/20302 183
Pantallas de depuración de esclavo 185
179
Depuración CANopenwww.infoPLC.net
Acceder a las pantallas de depuración de dispositivos remotos
Presentación
Las operaciones siguientes describen cómo acceder a las distintas pantallas de depuración de los elementos de red CANopen.
NOTA: Sólo se puede acceder a la pantalla de depuración en modalidad online.
Pantalla de depuración de maestro
Para acceder a la pantalla de depuración de maestro, haga lo siguiente:
Pantalla de depuración de esclavo
Para acceder a la pantalla de depuración de esclavo, haga lo siguiente:
Paso Acción
1 Conectarse al PLC del administrador.
2 Acceder a la pantalla de configuración del maestro CANopen (véase página 88).
3 Seleccionar la ficha Depuración.
Paso Acción
1 Conectarse al PLC del administrador.
2 Acceder a la pantalla de configuración del esclavo CANopen (véase página 66).
3 Seleccionar la ficha Depuración.
180 35013947 04/2009
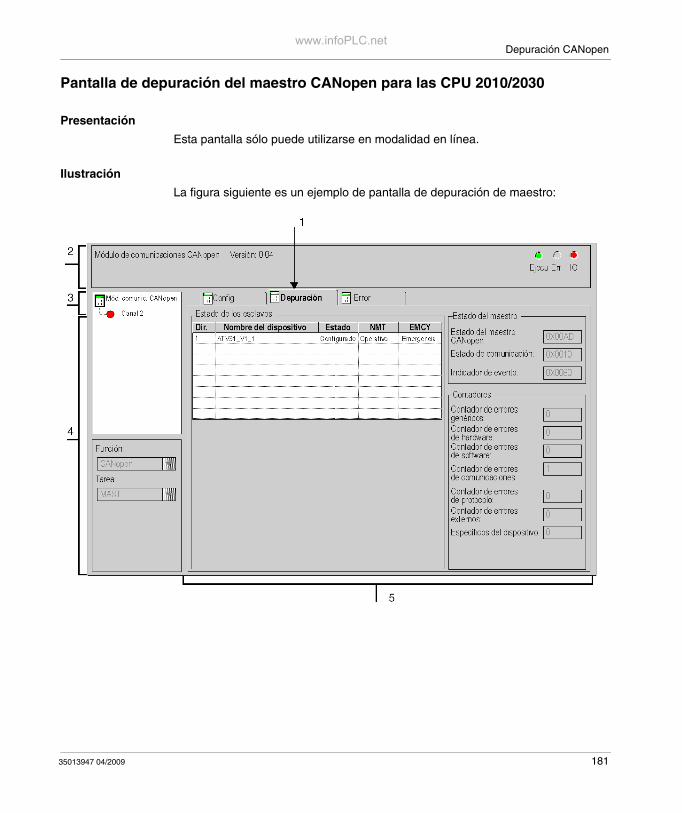
Depuración CANopenwww.infoPLC.net
Pantalla de depuración del maestro CANopen para las CPU 2010/2030
Presentación
Esta pantalla sólo puede utilizarse en modalidad en línea.
Ilustración
La figura siguiente es un ejemplo de pantalla de depuración de maestro:
35013947 04/2009 181
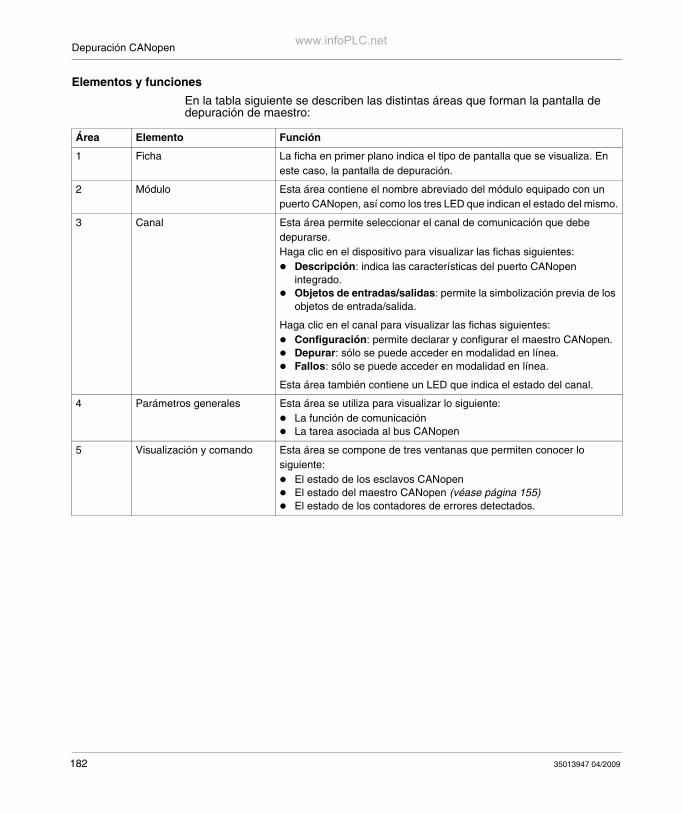
Depuración CANopenwww.infoPLC.net
Elementos y funciones
En la tabla siguiente se describen las distintas áreas que forman la pantalla de depuración de maestro:
Área Elemento Función
1 Ficha La ficha en primer plano indica el tipo de pantalla que se visualiza. En este caso, la pantalla de depuración.
2 Módulo Esta área contiene el nombre abreviado del módulo equipado con un puerto CANopen, así como los tres LED que indican el estado del mismo.
3 Canal Esta área permite seleccionar el canal de comunicación que debe depurarse.Haga clic en el dispositivo para visualizar las fichas siguientes: Descripción: indica las características del puerto CANopen
integrado. Objetos de entradas/salidas: permite la simbolización previa de los
objetos de entrada/salida.
Haga clic en el canal para visualizar las fichas siguientes: Configuración: permite declarar y configurar el maestro CANopen. Depurar: sólo se puede acceder en modalidad en línea. Fallos: sólo se puede acceder en modalidad en línea.
Esta área también contiene un LED que indica el estado del canal.
4 Parámetros generales Esta área se utiliza para visualizar lo siguiente: La función de comunicación La tarea asociada al bus CANopen
5 Visualización y comando Esta área se compone de tres ventanas que permiten conocer lo siguiente: El estado de los esclavos CANopen El estado del maestro CANopen (véase página 155) El estado de los contadores de errores detectados.
182 35013947 04/2009
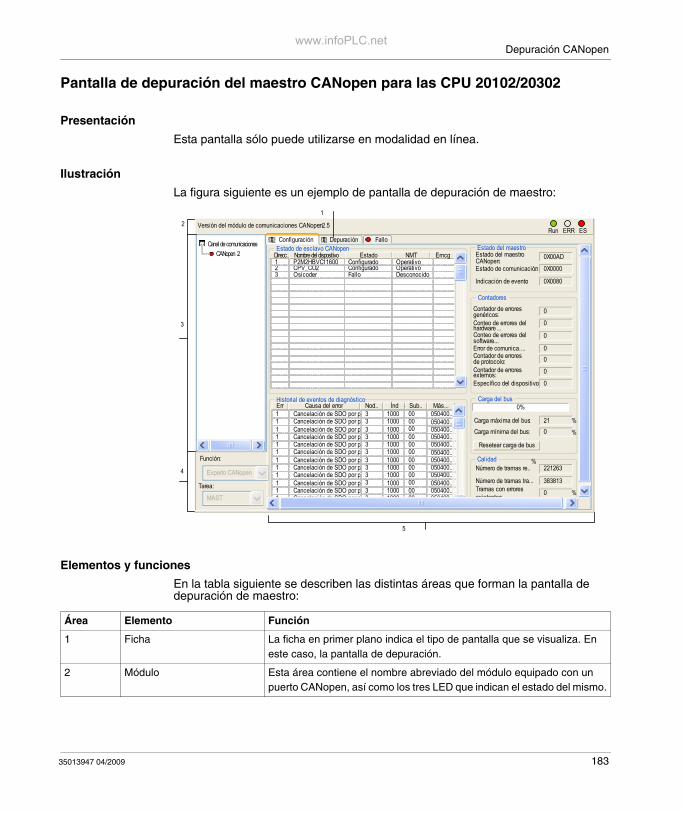
Depuración CANopenwww.infoPLC.net
Pantalla de depuración del maestro CANopen para las CPU 20102/20302
Presentación
Esta pantalla sólo puede utilizarse en modalidad en línea.
Ilustración
La figura siguiente es un ejemplo de pantalla de depuración de maestro:
Elementos y funciones
En la tabla siguiente se describen las distintas áreas que forman la pantalla de depuración de maestro:
0
Canal de comunicaciones
CANopen 2
Experto CANopen
MAST
Estado del maestro0X00AD
0X0000
0X0080
Estado del maestro CANopen:Estado de comunicación:
Indicación de evento:
Contadores
0
0
0
Contador de errores genéricos:Conteo de errores del hardware ...Conteo de errores del software...
0
0
0
Error de comunica….Contador de errores de protocolo:Contador de errores externos:
0Específico del dispositivo:
21Carga máxima del bus:
0Carga mínima del bus:
Carga del bus
Resetear carga de bus
0%
Calidad221263
383813
0
Número de tramas re..
Número de tramas tra...Tramas con errores existentes:
Depuración Fallo
321
OsicoderCPV_CO2P2M2HBVC11600
DesconocidoOperativoOperativo
FalloConfiguradoConfigurado
111111111111
Cancelación de SDO por parte del cliente Cancelación de SDO por parte del cliente Cancelación de SDO por parte del cliente Cancelación de SDO por parte del cliente Cancelación de SDO por parte del cliente Cancelación de SDO por parte del cliente Cancelación de SDO por parte del cliente Cancelación de SDO por parte del cliente Cancelación de SDO por parte del cliente Cancelación de SDO por parte del cliente Cancelación de SDO por parte del cliente Cancelación de SDO por parte del cliente
333333333333
100010001000100010001000100010001000100010001000
000000000000000000000000
050400..050400..050400..050400..050400..050400..050400..050400..050400..050400..050400..050400..
Direcc. Nombre del dispositivo Estado NMT Emcg
Err Causa del error Nod.. Índ Más...Sub..Historial de eventos de diagnóstico
Estado de esclavo CANopen
Versión del módulo de comunicaciones CANopen: 2.5
Función:
Tarea:
Run ERR ESConfiguración
%
%
%
%
1
2
3
4
5
Área Elemento Función
1 Ficha La ficha en primer plano indica el tipo de pantalla que se visualiza. En este caso, la pantalla de depuración.
2 Módulo Esta área contiene el nombre abreviado del módulo equipado con un puerto CANopen, así como los tres LED que indican el estado del mismo.
35013947 04/2009 183
Depuración CANopenwww.infoPLC.net
3 Canal Esta área permite seleccionar el canal de comunicación que debe depurarse.Haga clic en el dispositivo para visualizar las fichas siguientes: Descripción: indica las características del puerto CANopen
integrado. Objetos de entradas/salidas: permite la simbolización previa de los
objetos de entrada/salida.
Haga clic en el canal para visualizar las fichas siguientes: Configuración: permite declarar y configurar el maestro CANopen. Depurar: sólo se puede acceder en modalidad en línea. Fallos: sólo se puede acceder en modalidad en línea.
Esta área también contiene un LED que indica el estado del canal.
4 Parámetros generales Esta área se utiliza para visualizar lo siguiente: La función de comunicación La tarea asociada al bus CANopen
5 Visualización y comando Esta área se compone de tres ventanas que permiten conocer lo siguiente: El estado de los esclavos CANopen El estado del maestro CANopen. (véase página 211) El estado de los contadores de errores El estado de la carga del bus (véase página 195). El estado de la calidad del bus (véase página 196). El estado de la tabla de eventos de diagnóstico (véase página 194).
Área Elemento Función
184 35013947 04/2009
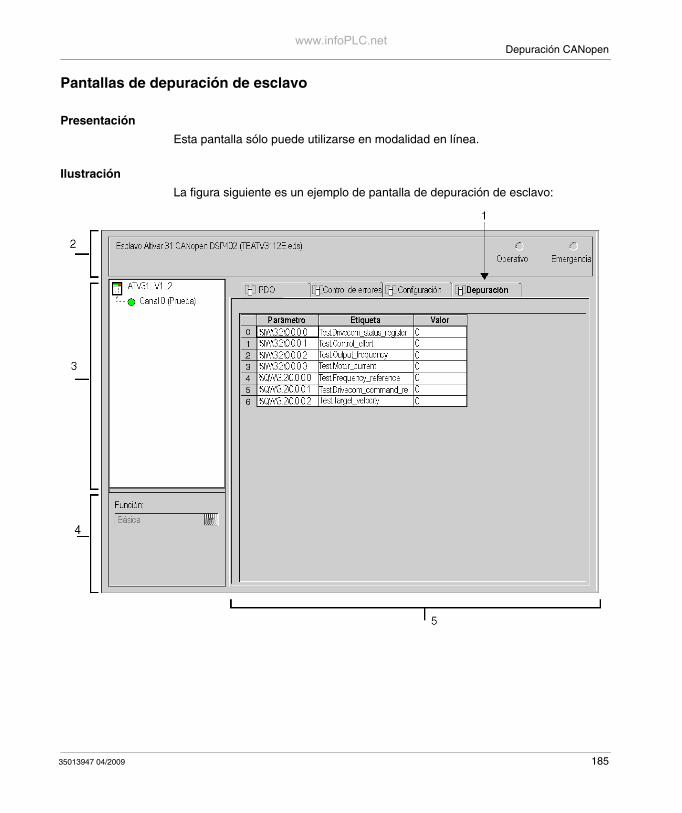
Depuración CANopenwww.infoPLC.net
Pantallas de depuración de esclavo
Presentación
Esta pantalla sólo puede utilizarse en modalidad en línea.
Ilustración
La figura siguiente es un ejemplo de pantalla de depuración de esclavo:
35013947 04/2009 185
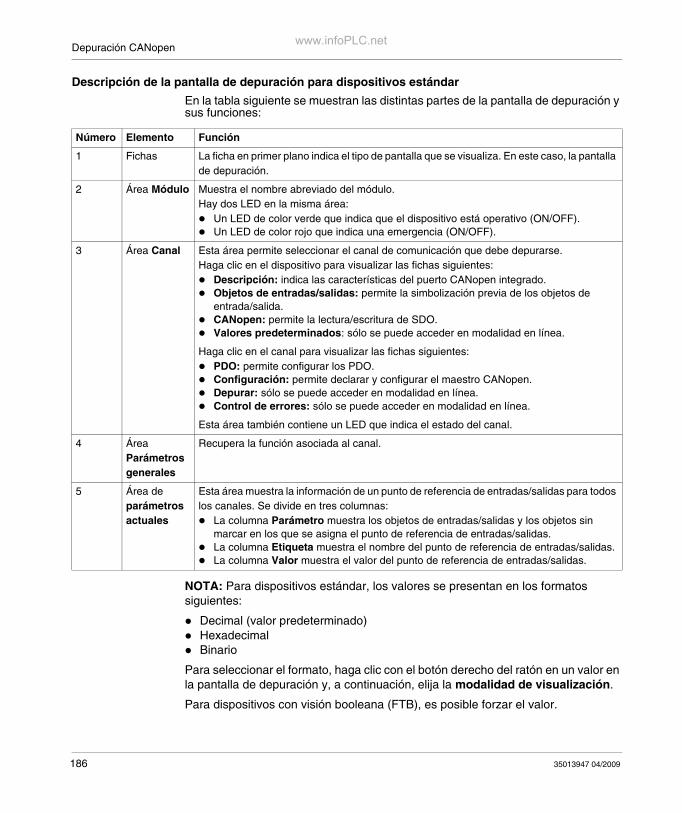
Depuración CANopenwww.infoPLC.net
Descripción de la pantalla de depuración para dispositivos estándar
En la tabla siguiente se muestran las distintas partes de la pantalla de depuración y sus funciones:
NOTA: Para dispositivos estándar, los valores se presentan en los formatos siguientes:
Decimal (valor predeterminado) Hexadecimal Binario
Para seleccionar el formato, haga clic con el botón derecho del ratón en un valor en la pantalla de depuración y, a continuación, elija la modalidad de visualización.
Para dispositivos con visión booleana (FTB), es posible forzar el valor.
Número Elemento Función
1 Fichas La ficha en primer plano indica el tipo de pantalla que se visualiza. En este caso, la pantalla de depuración.
2 Área Módulo Muestra el nombre abreviado del módulo.Hay dos LED en la misma área: Un LED de color verde que indica que el dispositivo está operativo (ON/OFF). Un LED de color rojo que indica una emergencia (ON/OFF).
3 Área Canal Esta área permite seleccionar el canal de comunicación que debe depurarse.Haga clic en el dispositivo para visualizar las fichas siguientes: Descripción: indica las características del puerto CANopen integrado. Objetos de entradas/salidas: permite la simbolización previa de los objetos de
entrada/salida. CANopen: permite la lectura/escritura de SDO. Valores predeterminados: sólo se puede acceder en modalidad en línea.
Haga clic en el canal para visualizar las fichas siguientes: PDO: permite configurar los PDO. Configuración: permite declarar y configurar el maestro CANopen. Depurar: sólo se puede acceder en modalidad en línea. Control de errores: sólo se puede acceder en modalidad en línea.
Esta área también contiene un LED que indica el estado del canal.
4 Área Parámetros generales
Recupera la función asociada al canal.
5 Área de parámetros actuales
Esta área muestra la información de un punto de referencia de entradas/salidas para todos los canales. Se divide en tres columnas: La columna Parámetro muestra los objetos de entradas/salidas y los objetos sin
marcar en los que se asigna el punto de referencia de entradas/salidas. La columna Etiqueta muestra el nombre del punto de referencia de entradas/salidas. La columna Valor muestra el valor del punto de referencia de entradas/salidas.
186 35013947 04/2009

Depuración CANopenwww.infoPLC.net
NOTA: En la columna Valor, cuando una variable aparece en color rojo, se indica que está fuera del rango. El rango de la variable puede visualizarse haciendo clic sobre ella. El rango aparece en la barra de estado.
35013947 04/2009 187

Depuración CANopen
188 35013947 04/2009
www.infoPLC.net
35013947 04/2009
8
Diagnóstico
35013947 04/2009
www.infoPLC.net
Diagnóstico
Objetivo
En esta sección se presentan los métodos de diagnóstico del bus CANopen.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Realización de un diagnóstico 190
Diagnóstico del maestro para las CPU 2010/2030 191
Diagnóstico del maestro para las CPU 20102/20302 193
Diagnósticos de esclavos 197
189
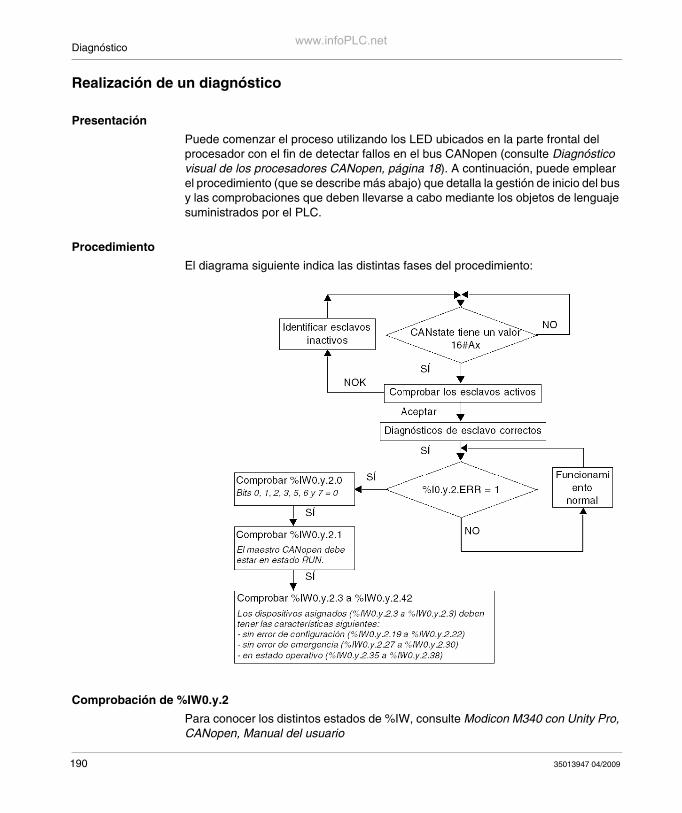
Diagnósticowww.infoPLC.net
Realización de un diagnóstico
Presentación
Puede comenzar el proceso utilizando los LED ubicados en la parte frontal del procesador con el fin de detectar fallos en el bus CANopen (consulte Diagnóstico visual de los procesadores CANopen, página 18). A continuación, puede emplear el procedimiento (que se describe más abajo) que detalla la gestión de inicio del bus y las comprobaciones que deben llevarse a cabo mediante los objetos de lenguaje suministrados por el PLC.
Procedimiento
El diagrama siguiente indica las distintas fases del procedimiento:
Comprobación de %IW0.y.2
Para conocer los distintos estados de %IW, consulte Modicon M340 con Unity Pro, CANopen, Manual del usuario
190 35013947 04/2009
Diagnósticowww.infoPLC.net
Diagnóstico del maestro para las CPU 2010/2030
Presentación
Es posible diagnosticar el maestro de bus CANopen:
En el módulo. En el canal.
Diagnóstico de módulos
La pantalla de diagnóstico del módulo muestra los errores existentes, si los hay, clasificados por categoría:
Internos Externos Otros
Diagnóstico de canal
La pantalla de diagnóstico del canal muestra las anomalías existentes, si las hay, clasificadas por categoría:
Externas Otras
En la tabla siguiente se presentan las posibles anomalías de una función CANopen:
Tipo error Error Objeto de lenguaje
Externos El maestro CANopen no se encuentra operativo. %MWr.m.c.2.0
Uno o varios esclavos no se encuentran operativos.
%MWr.m.c.2.1
35013947 04/2009 191
Diagnósticowww.infoPLC.net
Otros Error de configuración detectado. %MWr.m.c.2.3
Desborde de la prioridad baja de la cola de recepción.
%IWr.m.c.0.0
Desborde del controlador CAN. %IWr.m.c.0.1
Controlador CAN desconectado del bus. %IWr.m.c.0.2
Error del controlador CAN detectado. %IWr.m.c.0.3
El controlador CAN ya no está en estado de error. %IWr.m.c.0.4
Desborde de la prioridad baja de la cola de transmisión.
%IWr.m.c.0.5
Desborde de la prioridad alta de la cola de recepción.
%IWr.m.c.0.6
Desborde de la prioridad alta de la cola de transmisión.
%IWr.m.c.0.7
El tiempo del ciclo de tarea es superior al tiempo de ciclo del maestro CANopen.
%IWr.m.c.0.8
Tipo error Error Objeto de lenguaje
192 35013947 04/2009
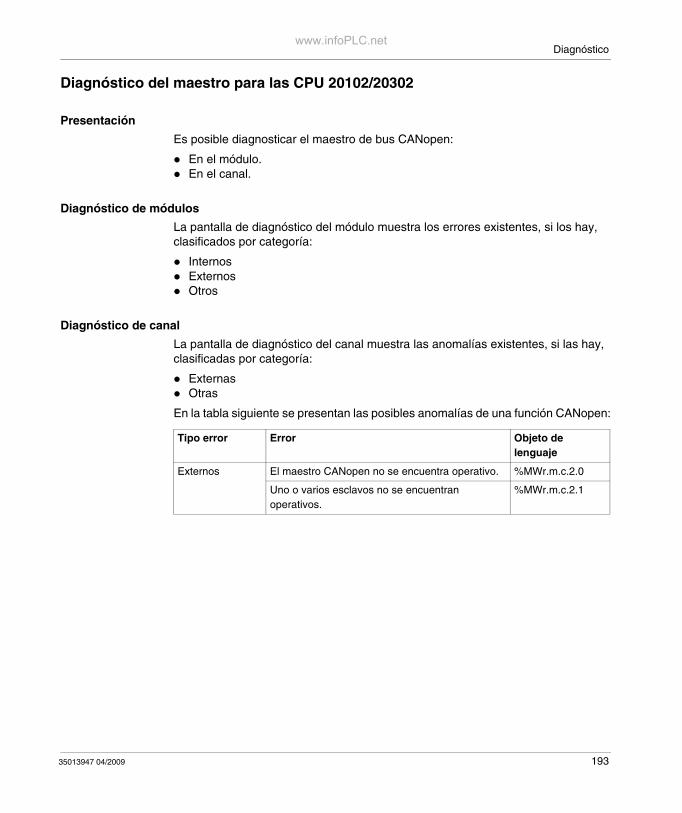
Diagnósticowww.infoPLC.net
Diagnóstico del maestro para las CPU 20102/20302
Presentación
Es posible diagnosticar el maestro de bus CANopen:
En el módulo. En el canal.
Diagnóstico de módulos
La pantalla de diagnóstico del módulo muestra los errores existentes, si los hay, clasificados por categoría:
Internos Externos Otros
Diagnóstico de canal
La pantalla de diagnóstico del canal muestra las anomalías existentes, si las hay, clasificadas por categoría:
Externas Otras
En la tabla siguiente se presentan las posibles anomalías de una función CANopen:
Tipo error Error Objeto de lenguaje
Externos El maestro CANopen no se encuentra operativo. %MWr.m.c.2.0
Uno o varios esclavos no se encuentran operativos.
%MWr.m.c.2.1
35013947 04/2009 193
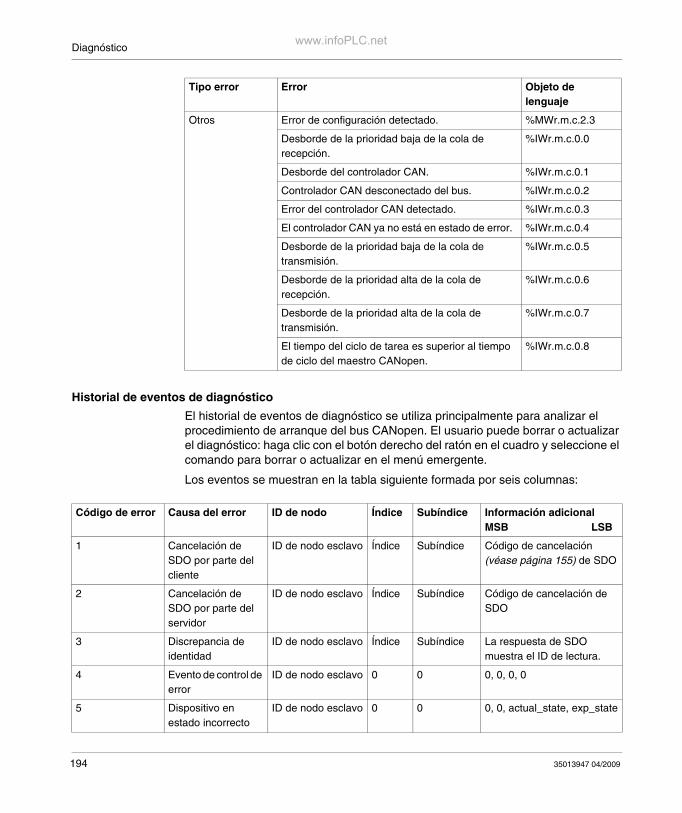
Diagnósticowww.infoPLC.net
Historial de eventos de diagnóstico
El historial de eventos de diagnóstico se utiliza principalmente para analizar el procedimiento de arranque del bus CANopen. El usuario puede borrar o actualizar el diagnóstico: haga clic con el botón derecho del ratón en el cuadro y seleccione el comando para borrar o actualizar en el menú emergente.
Los eventos se muestran en la tabla siguiente formada por seis columnas:
Otros Error de configuración detectado. %MWr.m.c.2.3
Desborde de la prioridad baja de la cola de recepción.
%IWr.m.c.0.0
Desborde del controlador CAN. %IWr.m.c.0.1
Controlador CAN desconectado del bus. %IWr.m.c.0.2
Error del controlador CAN detectado. %IWr.m.c.0.3
El controlador CAN ya no está en estado de error. %IWr.m.c.0.4
Desborde de la prioridad baja de la cola de transmisión.
%IWr.m.c.0.5
Desborde de la prioridad alta de la cola de recepción.
%IWr.m.c.0.6
Desborde de la prioridad alta de la cola de transmisión.
%IWr.m.c.0.7
El tiempo del ciclo de tarea es superior al tiempo de ciclo del maestro CANopen.
%IWr.m.c.0.8
Tipo error Error Objeto de lenguaje
Código de error Causa del error ID de nodo Índice Subíndice Información adicionalMSB LSB
1 Cancelación de SDO por parte del cliente
ID de nodo esclavo Índice Subíndice Código de cancelación (véase página 155) de SDO
2 Cancelación de SDO por parte del servidor
ID de nodo esclavo Índice Subíndice Código de cancelación de SDO
3 Discrepancia de identidad
ID de nodo esclavo Índice Subíndice La respuesta de SDO muestra el ID de lectura.
4 Evento de control de error
ID de nodo esclavo 0 0 0, 0, 0, 0
5 Dispositivo en estado incorrecto
ID de nodo esclavo 0 0 0, 0, actual_state, exp_state
194 35013947 04/2009
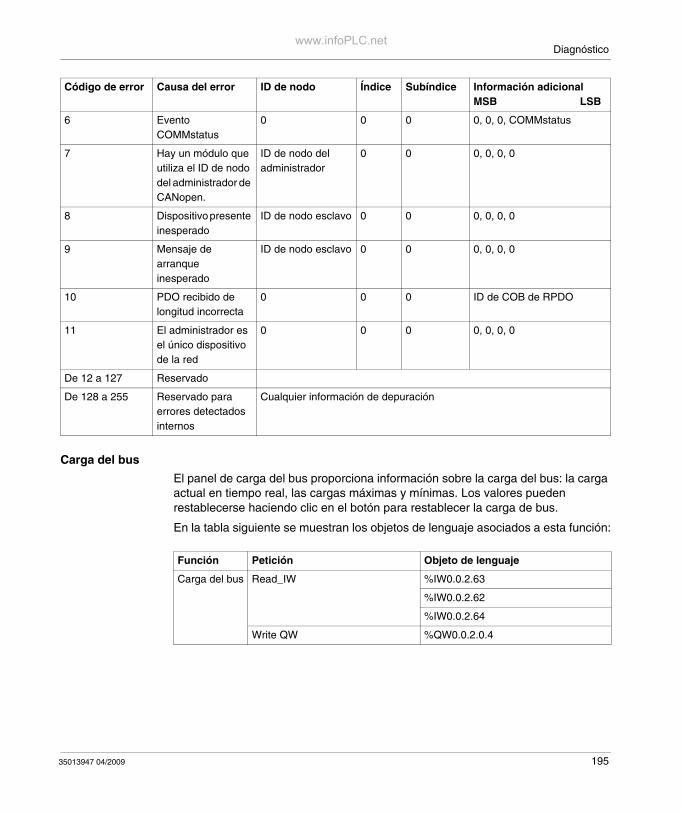
Diagnósticowww.infoPLC.net
Carga del bus
El panel de carga del bus proporciona información sobre la carga del bus: la carga actual en tiempo real, las cargas máximas y mínimas. Los valores pueden restablecerse haciendo clic en el botón para restablecer la carga de bus.
En la tabla siguiente se muestran los objetos de lenguaje asociados a esta función:
6 Evento COMMstatus
0 0 0 0, 0, 0, COMMstatus
7 Hay un módulo que utiliza el ID de nodo del administrador de CANopen.
ID de nodo del administrador
0 0 0, 0, 0, 0
8 Dispositivo presente inesperado
ID de nodo esclavo 0 0 0, 0, 0, 0
9 Mensaje de arranque inesperado
ID de nodo esclavo 0 0 0, 0, 0, 0
10 PDO recibido de longitud incorrecta
0 0 0 ID de COB de RPDO
11 El administrador es el único dispositivo de la red
0 0 0 0, 0, 0, 0
De 12 a 127 Reservado
De 128 a 255 Reservado para errores detectados internos
Cualquier información de depuración
Código de error Causa del error ID de nodo Índice Subíndice Información adicionalMSB LSB
Función Petición Objeto de lenguaje
Carga del bus Read_IW %IW0.0.2.63
%IW0.0.2.62
%IW0.0.2.64
Write QW %QW0.0.2.0.4
35013947 04/2009 195
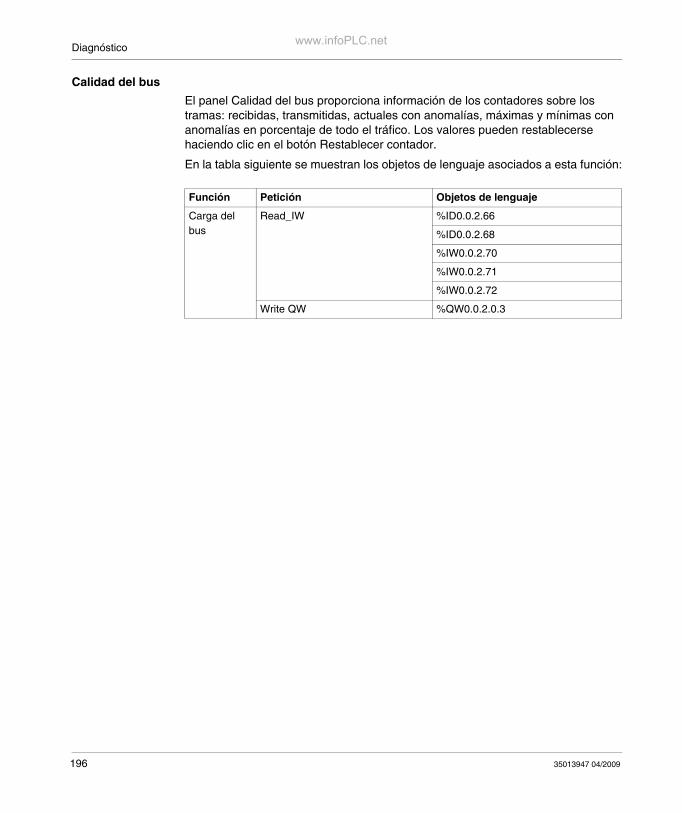
Diagnósticowww.infoPLC.net
Calidad del bus
El panel Calidad del bus proporciona información de los contadores sobre los tramas: recibidas, transmitidas, actuales con anomalías, máximas y mínimas con anomalías en porcentaje de todo el tráfico. Los valores pueden restablecerse haciendo clic en el botón Restablecer contador.
En la tabla siguiente se muestran los objetos de lenguaje asociados a esta función:
Función Petición Objetos de lenguaje
Carga del bus
Read_IW %ID0.0.2.66
%ID0.0.2.68
%IW0.0.2.70
%IW0.0.2.71
%IW0.0.2.72
Write QW %QW0.0.2.0.3
196 35013947 04/2009
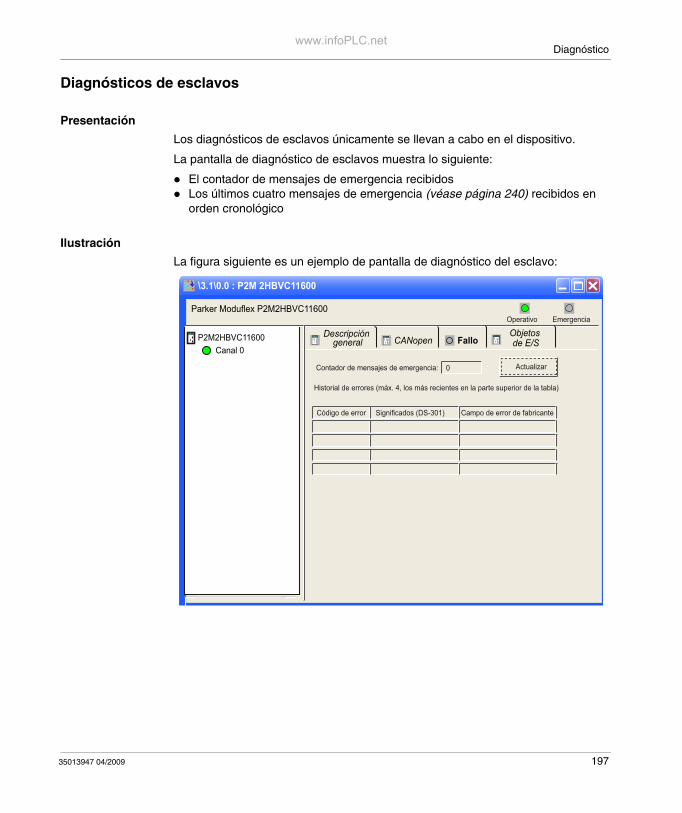
Diagnósticowww.infoPLC.net
Diagnósticos de esclavos
Presentación
Los diagnósticos de esclavos únicamente se llevan a cabo en el dispositivo.
La pantalla de diagnóstico de esclavos muestra lo siguiente:
El contador de mensajes de emergencia recibidos Los últimos cuatro mensajes de emergencia (véase página 240) recibidos en
orden cronológico
Ilustración
La figura siguiente es un ejemplo de pantalla de diagnóstico del esclavo:
\3.1\0.0 : P2M 2HBVC11600
Parker Moduflex P2M2HBVC11600
P2M2HBVC11600Canal 0
0
Código de error Significados (DS-301) Campo de error de fabricante
Operativo Emergencia
Contador de mensajes de emergencia:
Historial de errores (máx. 4, los más recientes en la parte superior de la tabla)
Descripcióngeneral
Objetosde E/SCANopen Fallo
Actualizar
35013947 04/2009 197
Diagnósticowww.infoPLC.net
Elementos y funciones
En la tabla siguiente se describen las distintas áreas que forman la pantalla de depuración de maestro:
NOTA: El contador de errores no puede restablecerse a 0.
NOTA: No hay consulta en los mensajes de emergencia. Los mensajes sólo se actualizan tras abrir la pantalla. El usuario los puede actualizar mediante el botón de actualización.
NOTA: El contador de mensajes de emergencia se actualiza automáticamente. Si aparecen nuevos mensajes, el color negro del botón de actualización cambia a rojo para indicar que el usuario debe actualizar la lista.
Área Elemento Función
1 Ficha La ficha en primer plano indica el tipo de pantalla que se visualiza. En este caso, la pantalla de diagnóstico.
2 Módulo Esta área contiene el nombre abreviado del módulo equipado con un puerto CANopen, así como los dos indicadores LED que indican el estado de éste.
3 Canal Esta área permite seleccionar el canal de comunicación que debe depurarse.Haga clic en el dispositivo para visualizar las fichas siguientes: Descripción general: proporciona las características del dispositivo. CANopen: permite la lectura/escritura de SDO (véase página 169)
(sólo en modalidad online) Fallos: permite visualizar los últimos cuatro mensajes de emergencia
(véase página 240) generados por el módulo esclavo (sólo es posible acceder a esta ficha en modalidad online; consulte la documentación del fabricante)
Objetos de E/S: permite la simbolización previa (véase página 265) de los objetos de entrada/salida.
Esta área también contiene un LED que indica el estado del canal.
4 Visualización Esta área se compone de lo siguiente: Contadores de errores detectados Los últimos cuatro mensajes (el último mensaje recibido se encuentra
en la línea superior)
198 35013947 04/2009
35013947 04/2009
9
Objetos de lenguaje
35013947 04/2009
www.infoPLC.net
Objetos de lenguaje
Objeto
En este capítulo se describen los objetos de lenguaje implícitos y explícitos asociados al maestro CANopen que integran los módulos de CPU.
NOTA: Los bits de sistema %S9 y las palabras de sistema %SW8 y %SW9 no se aplican a CANopen.
Contenido de este capítulo
Este capítulo contiene las siguientes secciones:
Sección Apartado Página
9.1 Información general 200
9.2 Objetos de lenguaje del IODDT específico de CANopen 210
9.3 Objetos de emergencia 240
199
Objetos de lenguajewww.infoPLC.net
9.1 Información general
Objeto
En esta sección se describen:
Los objetos de lenguaje e IODDT de la comunicación CANopen. Los objetos de lenguaje y el IODDT genérico que se aplican a todos los
protocolos de comunicación.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Presentación de los objetos de lenguaje para la comunicación CANopen 201
Objetos de lenguaje de intercambio implícito asociados a la función específica de la aplicación
202
Detalles de los objetos de intercambio implícito del IODDT de tipo T_COM_STS_GEN
203
Objetos de lenguaje de intercambio explícito asociados a la función específica de la aplicación
204
Detalles de los objetos de intercambio explícito del IODDT de tipo T_COM_STS_GEN
206
Gestión de intercambios e informes con objetos explícitos 208
200 35013947 04/2009
Objetos de lenguajewww.infoPLC.net
Presentación de los objetos de lenguaje para la comunicación CANopen
General
Los IODDT están predefinidos por el fabricante y contienen objetos de lenguaje de entradas/salidas que pertenecen a un canal de un módulo de aplicación específica.
La comunicación CANopen tiene un IODDT asociado:
T_COM_STS_GEN, que utilizan todos los protocolos de comunicación.
NOTA: La creación de una variable de tipo IODDT se lleva a cabo de dos maneras distintas:
Mediante la ficha Objeto de E/S. Mediante el Editor de datos.
Tipos de objetos de lenguaje
En cada IODDT se incluye un grupo de objetos de lenguaje que permite controlarlos y comprobar su funcionamiento.
Existen dos tipos de objetos de lenguaje:
Los objetos de intercambio implícito, que se intercambian automáticamente en cada ciclo de la tarea asociada con el módulo.
Los objetos de intercambio explícito, que se intercambian a petición de la aplicación, mediante las instrucciones de intercambio explícito.
Los intercambios implícitos son aquellos relativos al estado de los módulos, las señales de comunicación, los esclavos, etc.
Los intercambios explícitos permiten parametrizar el módulo, así como diagnosticarlo.
NOTA: Cada dispositivo esclavo tiene un IODDT (excepto FTB). Para obtener más información, consulte el manual de usuario del dispositivo correspondiente.
35013947 04/2009 201
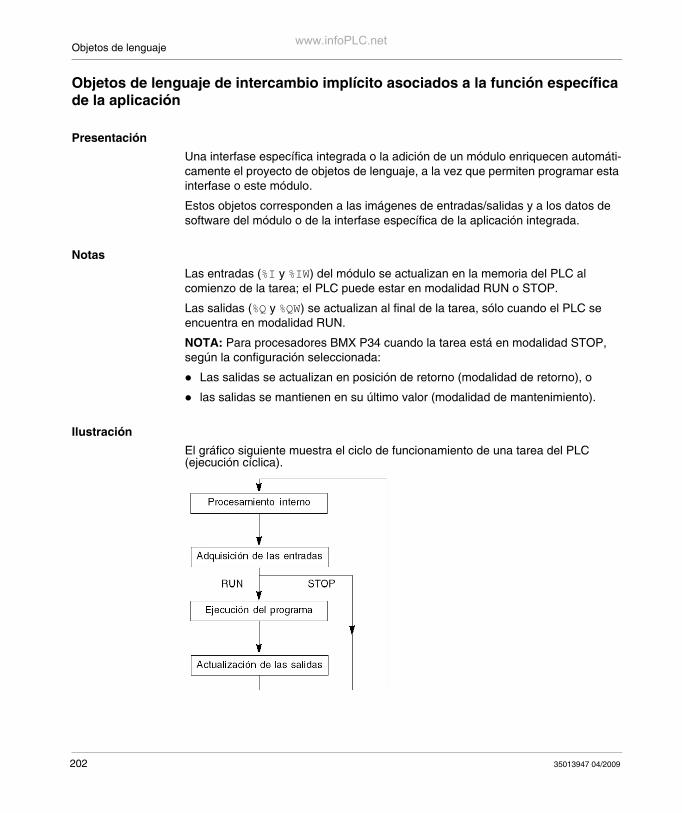
Objetos de lenguajewww.infoPLC.net
Objetos de lenguaje de intercambio implícito asociados a la función específica de la aplicación
Presentación
Una interfase específica integrada o la adición de un módulo enriquecen automáti-camente el proyecto de objetos de lenguaje, a la vez que permiten programar esta interfase o este módulo.
Estos objetos corresponden a las imágenes de entradas/salidas y a los datos de software del módulo o de la interfase específica de la aplicación integrada.
Notas
Las entradas (%I y %IW) del módulo se actualizan en la memoria del PLC al comienzo de la tarea; el PLC puede estar en modalidad RUN o STOP.
Las salidas (%Q y %QW) se actualizan al final de la tarea, sólo cuando el PLC se encuentra en modalidad RUN.
NOTA: Para procesadores BMX P34 cuando la tarea está en modalidad STOP, según la configuración seleccionada:
Las salidas se actualizan en posición de retorno (modalidad de retorno), o
las salidas se mantienen en su último valor (modalidad de mantenimiento).
Ilustración
El gráfico siguiente muestra el ciclo de funcionamiento de una tarea del PLC (ejecución cíclica).
202 35013947 04/2009
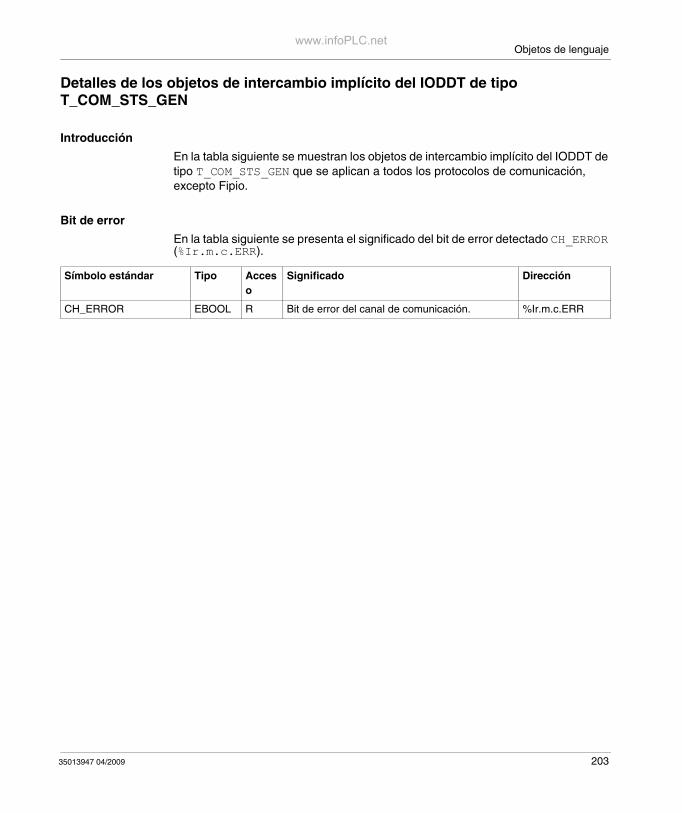
Objetos de lenguajewww.infoPLC.net
Detalles de los objetos de intercambio implícito del IODDT de tipo T_COM_STS_GEN
Introducción
En la tabla siguiente se muestran los objetos de intercambio implícito del IODDT de tipo T_COM_STS_GEN que se aplican a todos los protocolos de comunicación, excepto Fipio.
Bit de error
En la tabla siguiente se presenta el significado del bit de error detectado CH_ERROR (%Ir.m.c.ERR).
Símbolo estándar Tipo Acceso
Significado Dirección
CH_ERROR EBOOL R Bit de error del canal de comunicación. %Ir.m.c.ERR
35013947 04/2009 203
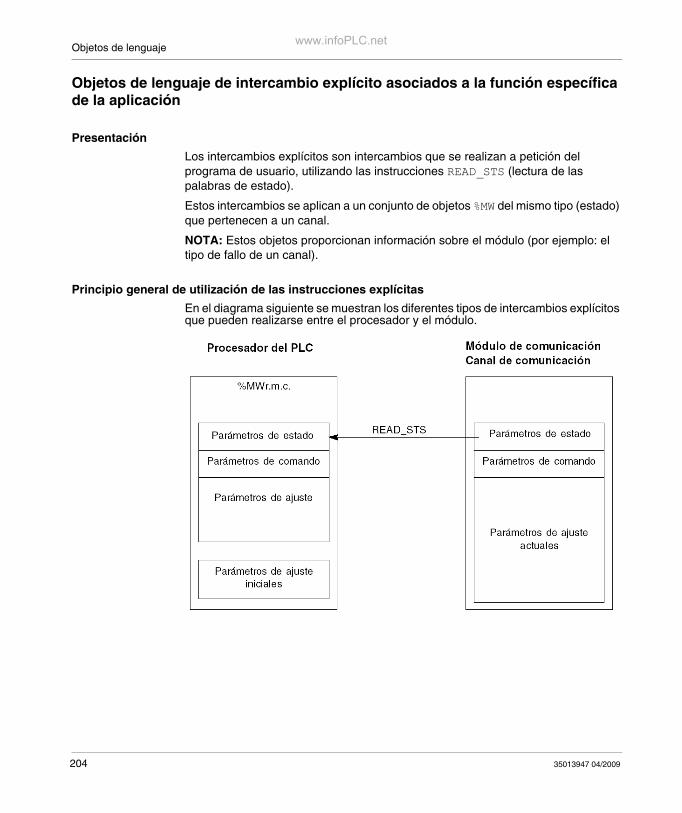
Objetos de lenguajewww.infoPLC.net
Objetos de lenguaje de intercambio explícito asociados a la función específica de la aplicación
Presentación
Los intercambios explícitos son intercambios que se realizan a petición del programa de usuario, utilizando las instrucciones READ_STS (lectura de las palabras de estado).
Estos intercambios se aplican a un conjunto de objetos %MW del mismo tipo (estado) que pertenecen a un canal.
NOTA: Estos objetos proporcionan información sobre el módulo (por ejemplo: el tipo de fallo de un canal).
Principio general de utilización de las instrucciones explícitas
En el diagrama siguiente se muestran los diferentes tipos de intercambios explícitos que pueden realizarse entre el procesador y el módulo.
204 35013947 04/2009
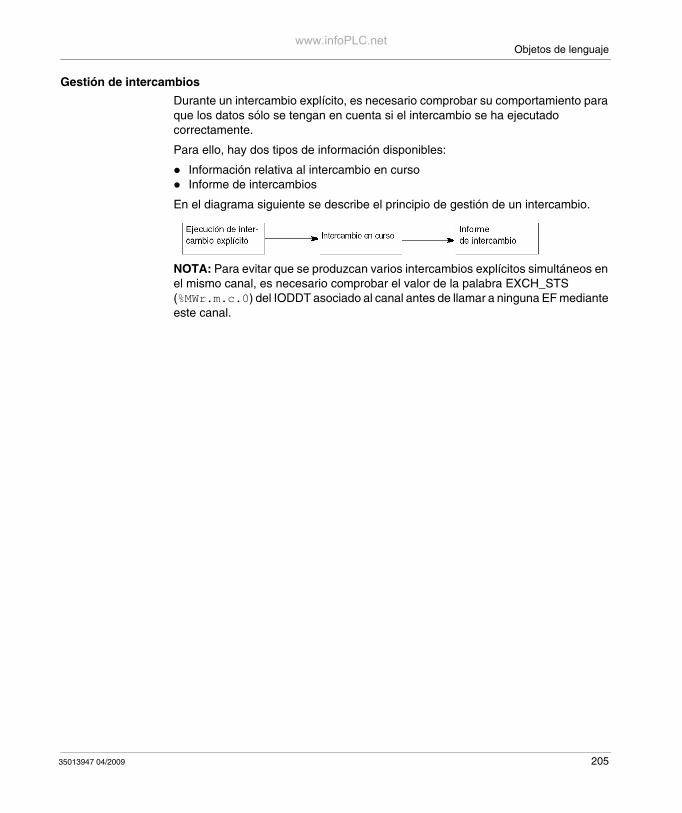
Objetos de lenguajewww.infoPLC.net
Gestión de intercambios
Durante un intercambio explícito, es necesario comprobar su comportamiento para que los datos sólo se tengan en cuenta si el intercambio se ha ejecutado correctamente.
Para ello, hay dos tipos de información disponibles:
Información relativa al intercambio en curso Informe de intercambios
En el diagrama siguiente se describe el principio de gestión de un intercambio.
NOTA: Para evitar que se produzcan varios intercambios explícitos simultáneos en el mismo canal, es necesario comprobar el valor de la palabra EXCH_STS (%MWr.m.c.0) del IODDT asociado al canal antes de llamar a ninguna EF mediante este canal.
35013947 04/2009 205
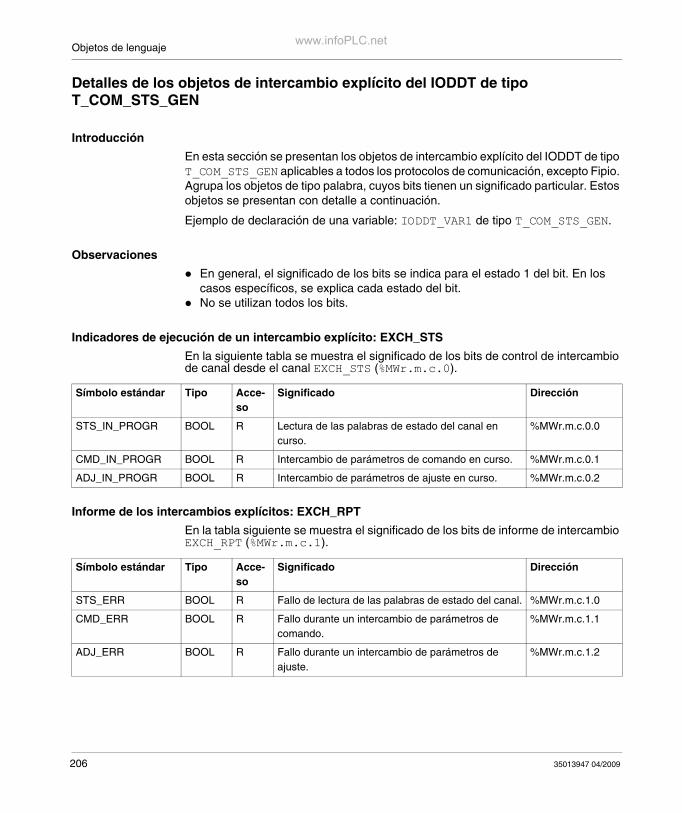
Objetos de lenguajewww.infoPLC.net
Detalles de los objetos de intercambio explícito del IODDT de tipo T_COM_STS_GEN
Introducción
En esta sección se presentan los objetos de intercambio explícito del IODDT de tipo T_COM_STS_GEN aplicables a todos los protocolos de comunicación, excepto Fipio. Agrupa los objetos de tipo palabra, cuyos bits tienen un significado particular. Estos objetos se presentan con detalle a continuación.
Ejemplo de declaración de una variable: IODDT_VAR1 de tipo T_COM_STS_GEN.
Observaciones
En general, el significado de los bits se indica para el estado 1 del bit. En los casos específicos, se explica cada estado del bit.
No se utilizan todos los bits.
Indicadores de ejecución de un intercambio explícito: EXCH_STS
En la siguiente tabla se muestra el significado de los bits de control de intercambio de canal desde el canal EXCH_STS (%MWr.m.c.0).
Informe de los intercambios explícitos: EXCH_RPT
En la tabla siguiente se muestra el significado de los bits de informe de intercambio EXCH_RPT (%MWr.m.c.1).
Símbolo estándar Tipo Acce-so
Significado Dirección
STS_IN_PROGR BOOL R Lectura de las palabras de estado del canal en curso.
%MWr.m.c.0.0
CMD_IN_PROGR BOOL R Intercambio de parámetros de comando en curso. %MWr.m.c.0.1
ADJ_IN_PROGR BOOL R Intercambio de parámetros de ajuste en curso. %MWr.m.c.0.2
Símbolo estándar Tipo Acce-so
Significado Dirección
STS_ERR BOOL R Fallo de lectura de las palabras de estado del canal. %MWr.m.c.1.0
CMD_ERR BOOL R Fallo durante un intercambio de parámetros de comando.
%MWr.m.c.1.1
ADJ_ERR BOOL R Fallo durante un intercambio de parámetros de ajuste.
%MWr.m.c.1.2
206 35013947 04/2009
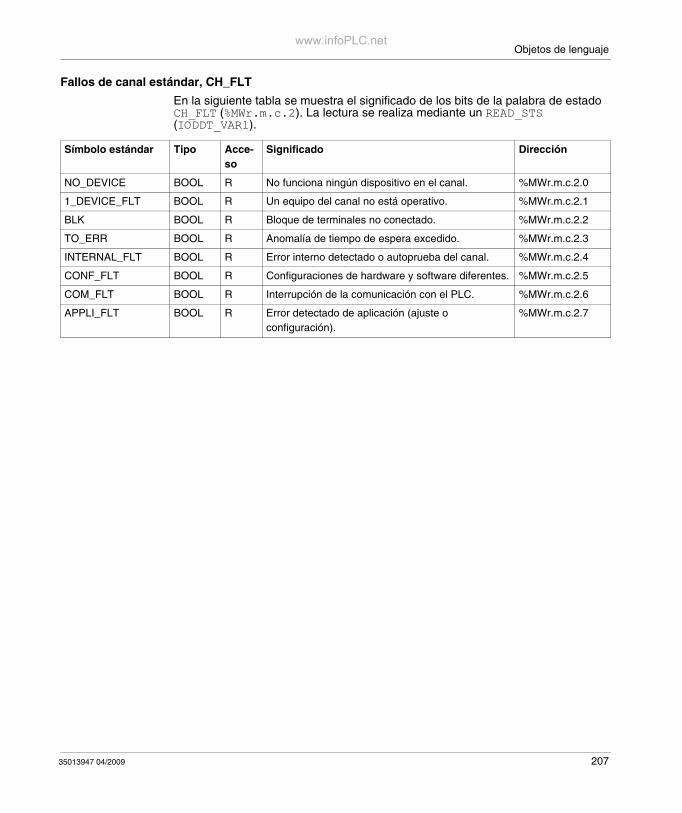
Objetos de lenguajewww.infoPLC.net
Fallos de canal estándar, CH_FLT
En la siguiente tabla se muestra el significado de los bits de la palabra de estado CH_FLT (%MWr.m.c.2). La lectura se realiza mediante un READ_STS (IODDT_VAR1).
Símbolo estándar Tipo Acce-so
Significado Dirección
NO_DEVICE BOOL R No funciona ningún dispositivo en el canal. %MWr.m.c.2.0
1_DEVICE_FLT BOOL R Un equipo del canal no está operativo. %MWr.m.c.2.1
BLK BOOL R Bloque de terminales no conectado. %MWr.m.c.2.2
TO_ERR BOOL R Anomalía de tiempo de espera excedido. %MWr.m.c.2.3
INTERNAL_FLT BOOL R Error interno detectado o autoprueba del canal. %MWr.m.c.2.4
CONF_FLT BOOL R Configuraciones de hardware y software diferentes. %MWr.m.c.2.5
COM_FLT BOOL R Interrupción de la comunicación con el PLC. %MWr.m.c.2.6
APPLI_FLT BOOL R Error detectado de aplicación (ajuste o configuración).
%MWr.m.c.2.7
35013947 04/2009 207
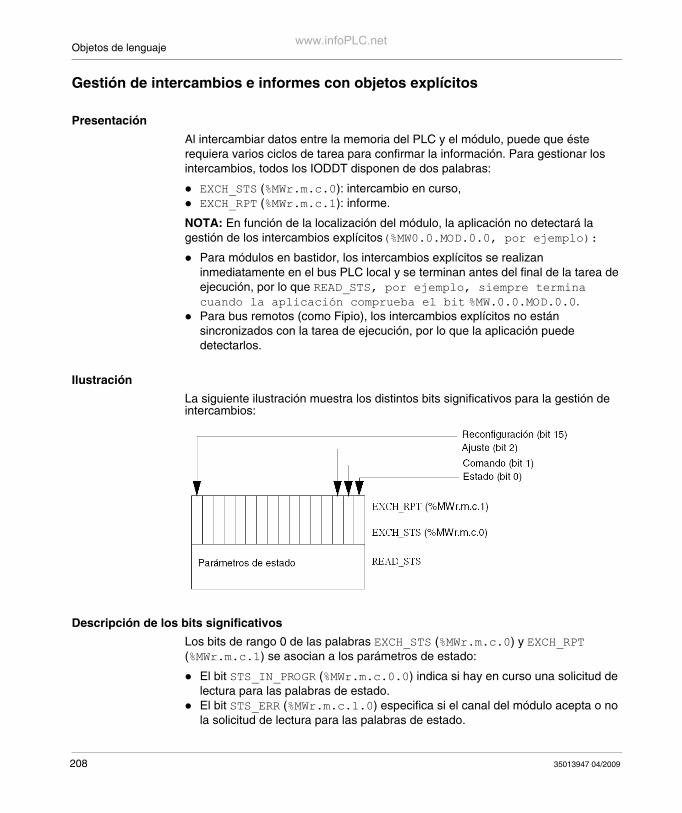
Objetos de lenguajewww.infoPLC.net
Gestión de intercambios e informes con objetos explícitos
Presentación
Al intercambiar datos entre la memoria del PLC y el módulo, puede que éste requiera varios ciclos de tarea para confirmar la información. Para gestionar los intercambios, todos los IODDT disponen de dos palabras:
EXCH_STS (%MWr.m.c.0): intercambio en curso, EXCH_RPT (%MWr.m.c.1): informe.
NOTA: En función de la localización del módulo, la aplicación no detectará la gestión de los intercambios explícitos(%MW0.0.MOD.0.0, por ejemplo):
Para módulos en bastidor, los intercambios explícitos se realizan inmediatamente en el bus PLC local y se terminan antes del final de la tarea de ejecución, por lo que READ_STS, por ejemplo, siempre termina cuando la aplicación comprueba el bit %MW.0.0.MOD.0.0.
Para bus remotos (como Fipio), los intercambios explícitos no están sincronizados con la tarea de ejecución, por lo que la aplicación puede detectarlos.
Ilustración
La siguiente ilustración muestra los distintos bits significativos para la gestión de intercambios:
Descripción de los bits significativos
Los bits de rango 0 de las palabras EXCH_STS (%MWr.m.c.0) y EXCH_RPT (%MWr.m.c.1) se asocian a los parámetros de estado:
El bit STS_IN_PROGR (%MWr.m.c.0.0) indica si hay en curso una solicitud de lectura para las palabras de estado.
El bit STS_ERR (%MWr.m.c.1.0) especifica si el canal del módulo acepta o no la solicitud de lectura para las palabras de estado.
208 35013947 04/2009
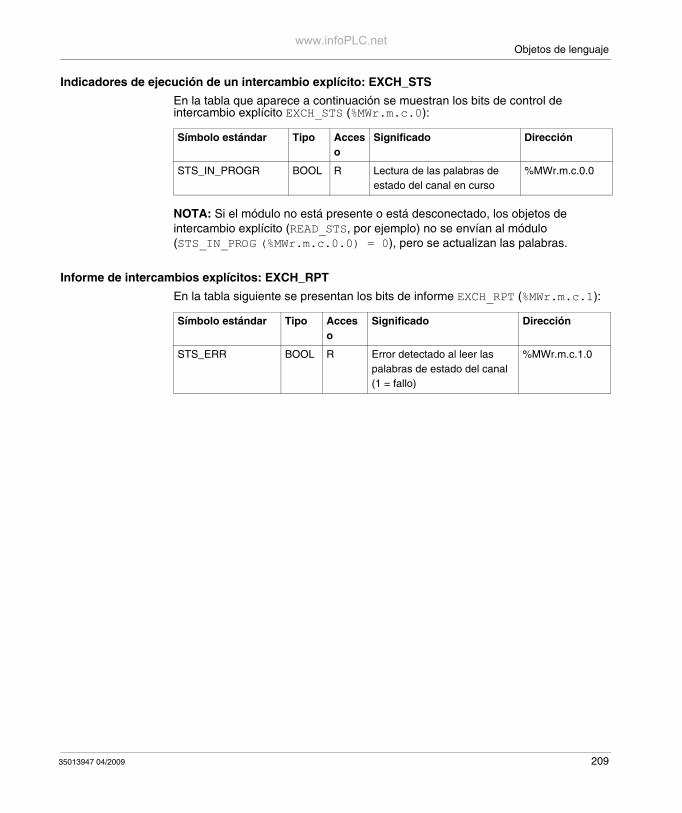
Objetos de lenguajewww.infoPLC.net
Indicadores de ejecución de un intercambio explícito: EXCH_STS
En la tabla que aparece a continuación se muestran los bits de control de intercambio explícito EXCH_STS (%MWr.m.c.0):
NOTA: Si el módulo no está presente o está desconectado, los objetos de intercambio explícito (READ_STS, por ejemplo) no se envían al módulo (STS_IN_PROG (%MWr.m.c.0.0) = 0), pero se actualizan las palabras.
Informe de intercambios explícitos: EXCH_RPT
En la tabla siguiente se presentan los bits de informe EXCH_RPT (%MWr.m.c.1):
Símbolo estándar Tipo Acceso
Significado Dirección
STS_IN_PROGR BOOL R Lectura de las palabras de estado del canal en curso
%MWr.m.c.0.0
Símbolo estándar Tipo Acceso
Significado Dirección
STS_ERR BOOL R Error detectado al leer las palabras de estado del canal (1 = fallo)
%MWr.m.c.1.0
35013947 04/2009 209

Objetos de lenguajewww.infoPLC.net
9.2 Objetos de lenguaje del IODDT específico de CANopen
Objeto
En esta sección se describen los objetos de lenguaje implícitos y explícitos del IODDT específico de CANopen, T_COM_CO_BMX.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Detalles del IODDT T_COM_CO_BMX 211
Detalles del IODDT T_COM_CO_BMX_EXPERT 224
Objetos de lenguaje asociados con la configuración 238
210 35013947 04/2009
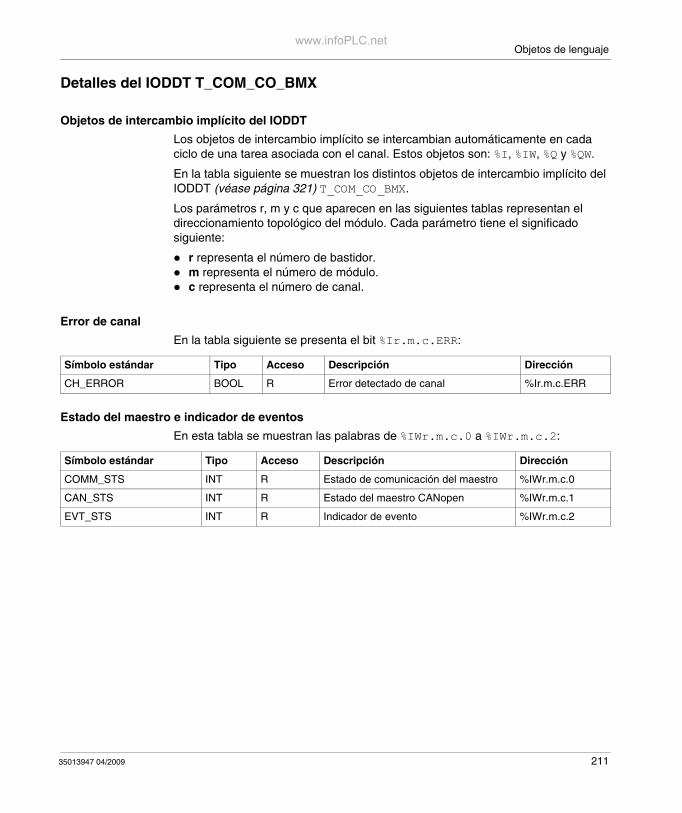
Objetos de lenguajewww.infoPLC.net
Detalles del IODDT T_COM_CO_BMX
Objetos de intercambio implícito del IODDT
Los objetos de intercambio implícito se intercambian automáticamente en cada ciclo de una tarea asociada con el canal. Estos objetos son: %I, %IW, %Q y %QW.
En la tabla siguiente se muestran los distintos objetos de intercambio implícito del IODDT (véase página 321) T_COM_CO_BMX.
Los parámetros r, m y c que aparecen en las siguientes tablas representan el direccionamiento topológico del módulo. Cada parámetro tiene el significado siguiente:
r representa el número de bastidor. m representa el número de módulo. c representa el número de canal.
Error de canal
En la tabla siguiente se presenta el bit %Ir.m.c.ERR:
Estado del maestro e indicador de eventos
En esta tabla se muestran las palabras de %IWr.m.c.0 a %IWr.m.c.2:
Símbolo estándar Tipo Acceso Descripción Dirección
CH_ERROR BOOL R Error detectado de canal %Ir.m.c.ERR
Símbolo estándar Tipo Acceso Descripción Dirección
COMM_STS INT R Estado de comunicación del maestro %IWr.m.c.0
CAN_STS INT R Estado del maestro CANopen %IWr.m.c.1
EVT_STS INT R Indicador de evento %IWr.m.c.2
35013947 04/2009 211
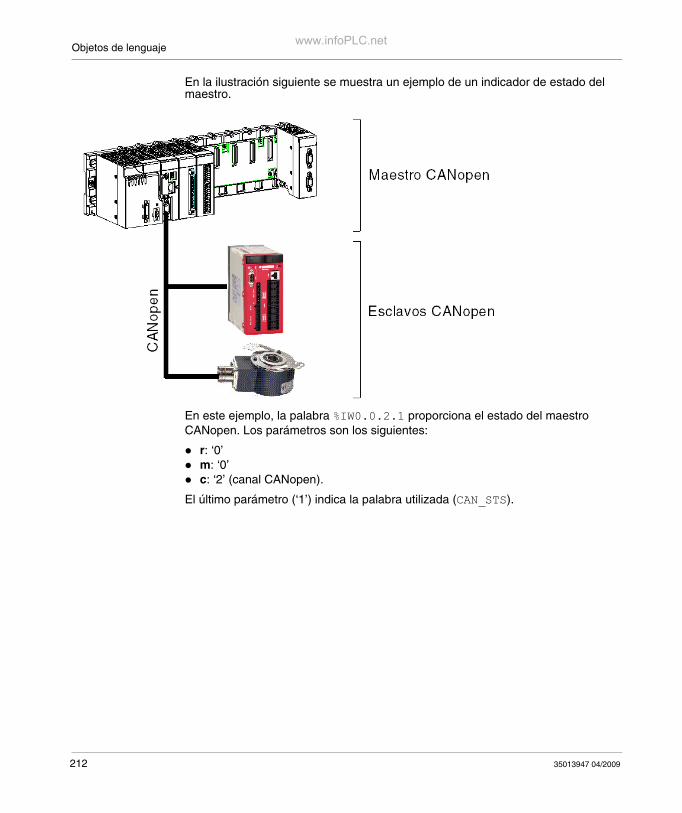
Objetos de lenguajewww.infoPLC.net
En la ilustración siguiente se muestra un ejemplo de un indicador de estado del maestro.
En este ejemplo, la palabra %IW0.0.2.1 proporciona el estado del maestro CANopen. Los parámetros son los siguientes:
r: ‘0’ m: ‘0’ c: ‘2’ (canal CANopen).
El último parámetro (‘1’) indica la palabra utilizada (CAN_STS).
212 35013947 04/2009
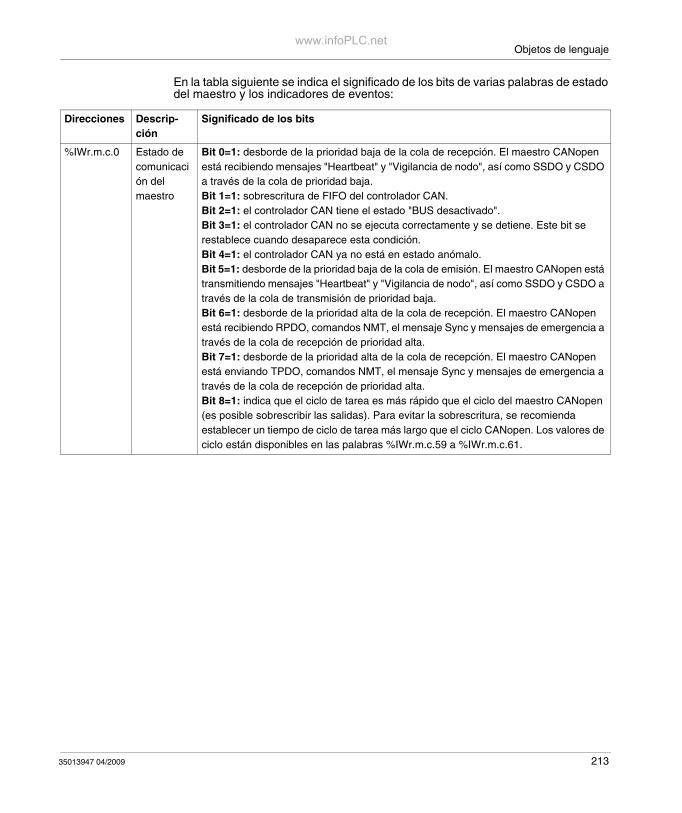
Objetos de lenguajewww.infoPLC.net
En la tabla siguiente se indica el significado de los bits de varias palabras de estado del maestro y los indicadores de eventos:
Direcciones Descrip-ción
Significado de los bits
%IWr.m.c.0 Estado de comunicación del maestro
Bit 0=1: desborde de la prioridad baja de la cola de recepción. El maestro CANopen está recibiendo mensajes "Heartbeat" y "Vigilancia de nodo", así como SSDO y CSDO a través de la cola de prioridad baja. Bit 1=1: sobrescritura de FIFO del controlador CAN.Bit 2=1: el controlador CAN tiene el estado "BUS desactivado". Bit 3=1: el controlador CAN no se ejecuta correctamente y se detiene. Este bit se restablece cuando desaparece esta condición.Bit 4=1: el controlador CAN ya no está en estado anómalo.Bit 5=1: desborde de la prioridad baja de la cola de emisión. El maestro CANopen está transmitiendo mensajes "Heartbeat" y "Vigilancia de nodo", así como SSDO y CSDO a través de la cola de transmisión de prioridad baja.Bit 6=1: desborde de la prioridad alta de la cola de recepción. El maestro CANopen está recibiendo RPDO, comandos NMT, el mensaje Sync y mensajes de emergencia a través de la cola de recepción de prioridad alta.Bit 7=1: desborde de la prioridad alta de la cola de recepción. El maestro CANopen está enviando TPDO, comandos NMT, el mensaje Sync y mensajes de emergencia a través de la cola de recepción de prioridad alta.Bit 8=1: indica que el ciclo de tarea es más rápido que el ciclo del maestro CANopen (es posible sobrescribir las salidas). Para evitar la sobrescritura, se recomienda establecer un tiempo de ciclo de tarea más largo que el ciclo CANopen. Los valores de ciclo están disponibles en las palabras %IWr.m.c.59 a %IWr.m.c.61.
35013947 04/2009 213
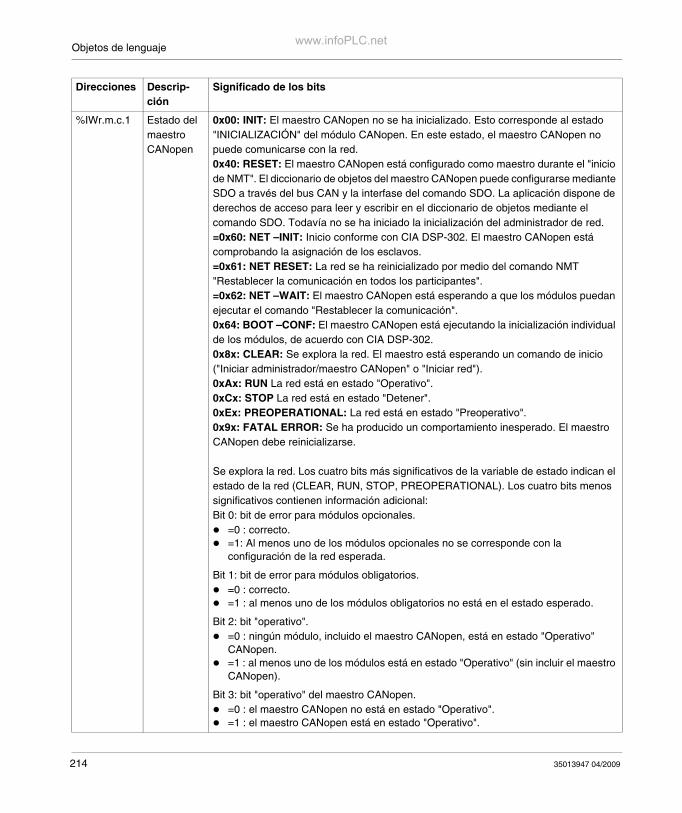
Objetos de lenguajewww.infoPLC.net
%IWr.m.c.1 Estado del maestro CANopen
0x00: INIT: El maestro CANopen no se ha inicializado. Esto corresponde al estado "INICIALIZACIÓN" del módulo CANopen. En este estado, el maestro CANopen no puede comunicarse con la red.0x40: RESET: El maestro CANopen está configurado como maestro durante el "inicio de NMT". El diccionario de objetos del maestro CANopen puede configurarse mediante SDO a través del bus CAN y la interfase del comando SDO. La aplicación dispone de derechos de acceso para leer y escribir en el diccionario de objetos mediante el comando SDO. Todavía no se ha iniciado la inicialización del administrador de red.=0x60: NET –INIT: Inicio conforme con CIA DSP-302. El maestro CANopen está comprobando la asignación de los esclavos.=0x61: NET RESET: La red se ha reinicializado por medio del comando NMT "Restablecer la comunicación en todos los participantes".=0x62: NET –WAIT: El maestro CANopen está esperando a que los módulos puedan ejecutar el comando "Restablecer la comunicación".0x64: BOOT –CONF: El maestro CANopen está ejecutando la inicialización individual de los módulos, de acuerdo con CIA DSP-302.0x8x: CLEAR: Se explora la red. El maestro está esperando un comando de inicio ("Iniciar administrador/maestro CANopen" o "Iniciar red"). 0xAx: RUN La red está en estado "Operativo".0xCx: STOP La red está en estado "Detener".0xEx: PREOPERATIONAL: La red está en estado "Preoperativo".0x9x: FATAL ERROR: Se ha producido un comportamiento inesperado. El maestro CANopen debe reinicializarse.
Se explora la red. Los cuatro bits más significativos de la variable de estado indican el estado de la red (CLEAR, RUN, STOP, PREOPERATIONAL). Los cuatro bits menos significativos contienen información adicional:Bit 0: bit de error para módulos opcionales. =0 : correcto. =1: Al menos uno de los módulos opcionales no se corresponde con la
configuración de la red esperada.
Bit 1: bit de error para módulos obligatorios. =0 : correcto. =1 : al menos uno de los módulos obligatorios no está en el estado esperado.
Bit 2: bit "operativo". =0 : ningún módulo, incluido el maestro CANopen, está en estado "Operativo"
CANopen. =1 : al menos uno de los módulos está en estado "Operativo" (sin incluir el maestro
CANopen).
Bit 3: bit "operativo" del maestro CANopen. =0 : el maestro CANopen no está en estado "Operativo". =1 : el maestro CANopen está en estado "Operativo".
Direcciones Descrip-ción
Significado de los bits
214 35013947 04/2009
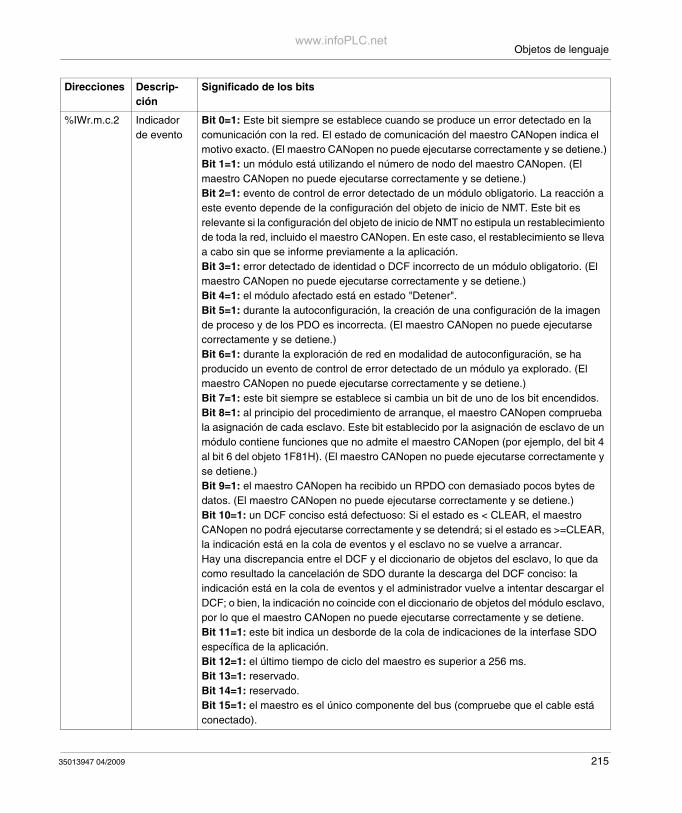
Objetos de lenguajewww.infoPLC.net
%IWr.m.c.2 Indicador de evento
Bit 0=1: Este bit siempre se establece cuando se produce un error detectado en la comunicación con la red. El estado de comunicación del maestro CANopen indica el motivo exacto. (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 1=1: un módulo está utilizando el número de nodo del maestro CANopen. (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 2=1: evento de control de error detectado de un módulo obligatorio. La reacción a este evento depende de la configuración del objeto de inicio de NMT. Este bit es relevante si la configuración del objeto de inicio de NMT no estipula un restablecimiento de toda la red, incluido el maestro CANopen. En este caso, el restablecimiento se lleva a cabo sin que se informe previamente a la aplicación.Bit 3=1: error detectado de identidad o DCF incorrecto de un módulo obligatorio. (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 4=1: el módulo afectado está en estado "Detener".Bit 5=1: durante la autoconfiguración, la creación de una configuración de la imagen de proceso y de los PDO es incorrecta. (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 6=1: durante la exploración de red en modalidad de autoconfiguración, se ha producido un evento de control de error detectado de un módulo ya explorado. (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 7=1: este bit siempre se establece si cambia un bit de uno de los bit encendidos.Bit 8=1: al principio del procedimiento de arranque, el maestro CANopen comprueba la asignación de cada esclavo. Este bit establecido por la asignación de esclavo de un módulo contiene funciones que no admite el maestro CANopen (por ejemplo, del bit 4 al bit 6 del objeto 1F81H). (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 9=1: el maestro CANopen ha recibido un RPDO con demasiado pocos bytes de datos. (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 10=1: un DCF conciso está defectuoso: Si el estado es < CLEAR, el maestro CANopen no podrá ejecutarse correctamente y se detendrá; si el estado es >=CLEAR, la indicación está en la cola de eventos y el esclavo no se vuelve a arrancar. Hay una discrepancia entre el DCF y el diccionario de objetos del esclavo, lo que da como resultado la cancelación de SDO durante la descarga del DCF conciso: la indicación está en la cola de eventos y el administrador vuelve a intentar descargar el DCF; o bien, la indicación no coincide con el diccionario de objetos del módulo esclavo, por lo que el maestro CANopen no puede ejecutarse correctamente y se detiene.Bit 11=1: este bit indica un desborde de la cola de indicaciones de la interfase SDO específica de la aplicación.Bit 12=1: el último tiempo de ciclo del maestro es superior a 256 ms.Bit 13=1: reservado.Bit 14=1: reservado.Bit 15=1: el maestro es el único componente del bus (compruebe que el cable está conectado).
Direcciones Descrip-ción
Significado de los bits
35013947 04/2009 215
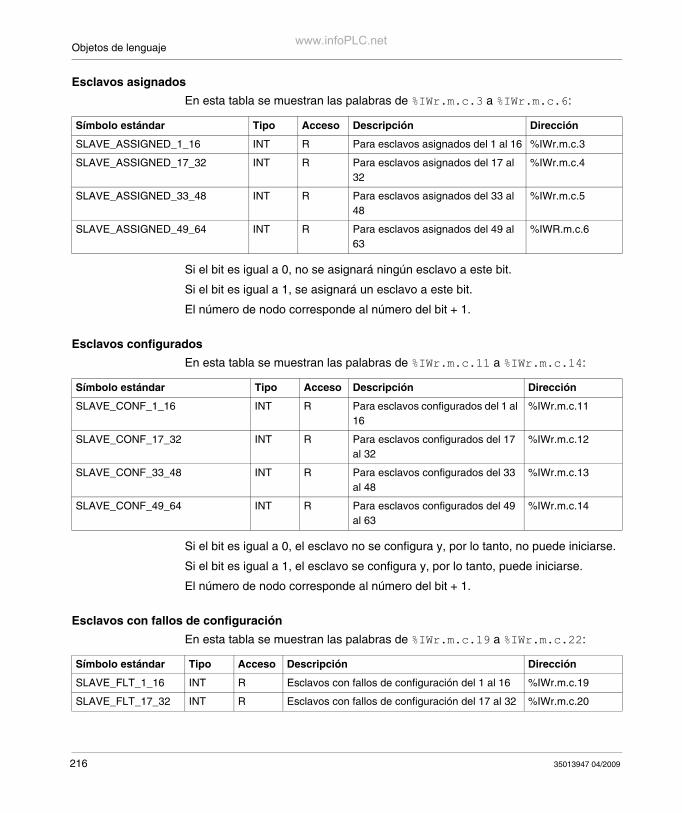
Objetos de lenguajewww.infoPLC.net
Esclavos asignados
En esta tabla se muestran las palabras de %IWr.m.c.3 a %IWr.m.c.6:
Si el bit es igual a 0, no se asignará ningún esclavo a este bit.
Si el bit es igual a 1, se asignará un esclavo a este bit.
El número de nodo corresponde al número del bit + 1.
Esclavos configurados
En esta tabla se muestran las palabras de %IWr.m.c.11 a %IWr.m.c.14:
Si el bit es igual a 0, el esclavo no se configura y, por lo tanto, no puede iniciarse.
Si el bit es igual a 1, el esclavo se configura y, por lo tanto, puede iniciarse.
El número de nodo corresponde al número del bit + 1.
Esclavos con fallos de configuración
En esta tabla se muestran las palabras de %IWr.m.c.19 a %IWr.m.c.22:
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_ASSIGNED_1_16 INT R Para esclavos asignados del 1 al 16 %IWr.m.c.3
SLAVE_ASSIGNED_17_32 INT R Para esclavos asignados del 17 al 32
%IWr.m.c.4
SLAVE_ASSIGNED_33_48 INT R Para esclavos asignados del 33 al 48
%IWr.m.c.5
SLAVE_ASSIGNED_49_64 INT R Para esclavos asignados del 49 al 63
%IWR.m.c.6
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_CONF_1_16 INT R Para esclavos configurados del 1 al 16
%IWr.m.c.11
SLAVE_CONF_17_32 INT R Para esclavos configurados del 17 al 32
%IWr.m.c.12
SLAVE_CONF_33_48 INT R Para esclavos configurados del 33 al 48
%IWr.m.c.13
SLAVE_CONF_49_64 INT R Para esclavos configurados del 49 al 63
%IWr.m.c.14
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_FLT_1_16 INT R Esclavos con fallos de configuración del 1 al 16 %IWr.m.c.19
SLAVE_FLT_17_32 INT R Esclavos con fallos de configuración del 17 al 32 %IWr.m.c.20
216 35013947 04/2009
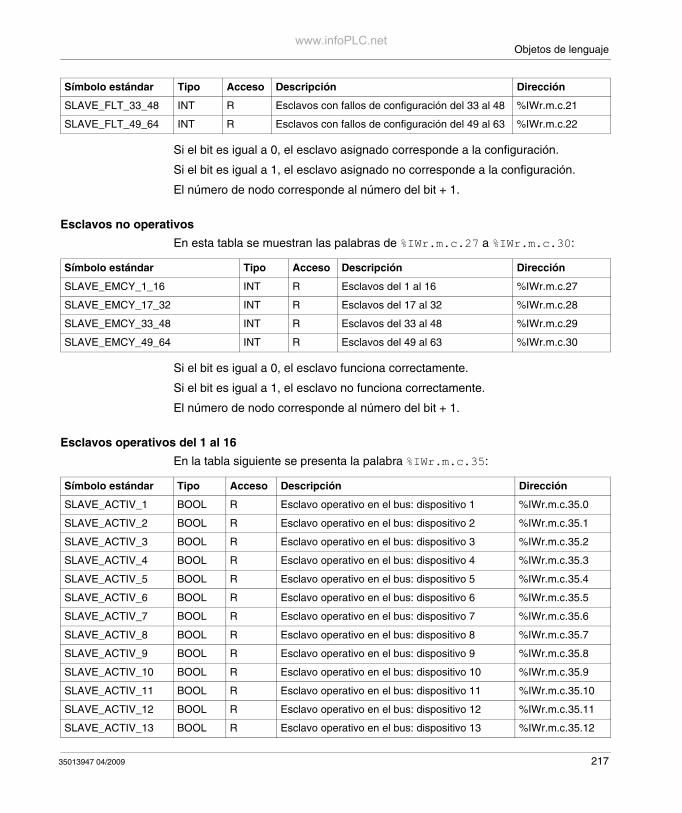
Objetos de lenguajewww.infoPLC.net
Si el bit es igual a 0, el esclavo asignado corresponde a la configuración.
Si el bit es igual a 1, el esclavo asignado no corresponde a la configuración.
El número de nodo corresponde al número del bit + 1.
Esclavos no operativos
En esta tabla se muestran las palabras de %IWr.m.c.27 a %IWr.m.c.30:
Si el bit es igual a 0, el esclavo funciona correctamente.
Si el bit es igual a 1, el esclavo no funciona correctamente.
El número de nodo corresponde al número del bit + 1.
Esclavos operativos del 1 al 16
En la tabla siguiente se presenta la palabra %IWr.m.c.35:
SLAVE_FLT_33_48 INT R Esclavos con fallos de configuración del 33 al 48 %IWr.m.c.21
SLAVE_FLT_49_64 INT R Esclavos con fallos de configuración del 49 al 63 %IWr.m.c.22
Símbolo estándar Tipo Acceso Descripción Dirección
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_EMCY_1_16 INT R Esclavos del 1 al 16 %IWr.m.c.27
SLAVE_EMCY_17_32 INT R Esclavos del 17 al 32 %IWr.m.c.28
SLAVE_EMCY_33_48 INT R Esclavos del 33 al 48 %IWr.m.c.29
SLAVE_EMCY_49_64 INT R Esclavos del 49 al 63 %IWr.m.c.30
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_ACTIV_1 BOOL R Esclavo operativo en el bus: dispositivo 1 %IWr.m.c.35.0
SLAVE_ACTIV_2 BOOL R Esclavo operativo en el bus: dispositivo 2 %IWr.m.c.35.1
SLAVE_ACTIV_3 BOOL R Esclavo operativo en el bus: dispositivo 3 %IWr.m.c.35.2
SLAVE_ACTIV_4 BOOL R Esclavo operativo en el bus: dispositivo 4 %IWr.m.c.35.3
SLAVE_ACTIV_5 BOOL R Esclavo operativo en el bus: dispositivo 5 %IWr.m.c.35.4
SLAVE_ACTIV_6 BOOL R Esclavo operativo en el bus: dispositivo 6 %IWr.m.c.35.5
SLAVE_ACTIV_7 BOOL R Esclavo operativo en el bus: dispositivo 7 %IWr.m.c.35.6
SLAVE_ACTIV_8 BOOL R Esclavo operativo en el bus: dispositivo 8 %IWr.m.c.35.7
SLAVE_ACTIV_9 BOOL R Esclavo operativo en el bus: dispositivo 9 %IWr.m.c.35.8
SLAVE_ACTIV_10 BOOL R Esclavo operativo en el bus: dispositivo 10 %IWr.m.c.35.9
SLAVE_ACTIV_11 BOOL R Esclavo operativo en el bus: dispositivo 11 %IWr.m.c.35.10
SLAVE_ACTIV_12 BOOL R Esclavo operativo en el bus: dispositivo 12 %IWr.m.c.35.11
SLAVE_ACTIV_13 BOOL R Esclavo operativo en el bus: dispositivo 13 %IWr.m.c.35.12
35013947 04/2009 217
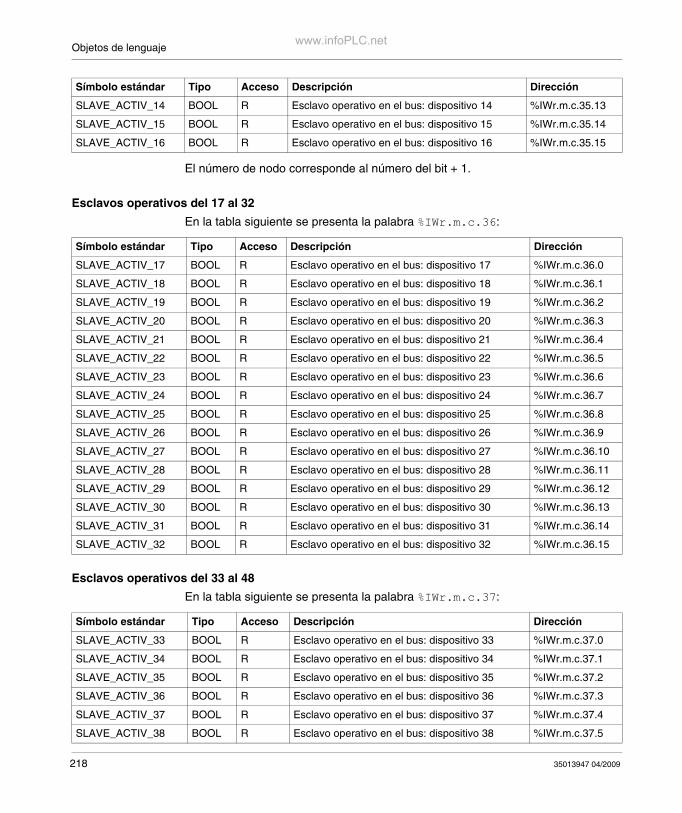
Objetos de lenguajewww.infoPLC.net
El número de nodo corresponde al número del bit + 1.
Esclavos operativos del 17 al 32
En la tabla siguiente se presenta la palabra %IWr.m.c.36:
Esclavos operativos del 33 al 48
En la tabla siguiente se presenta la palabra %IWr.m.c.37:
SLAVE_ACTIV_14 BOOL R Esclavo operativo en el bus: dispositivo 14 %IWr.m.c.35.13
SLAVE_ACTIV_15 BOOL R Esclavo operativo en el bus: dispositivo 15 %IWr.m.c.35.14
SLAVE_ACTIV_16 BOOL R Esclavo operativo en el bus: dispositivo 16 %IWr.m.c.35.15
Símbolo estándar Tipo Acceso Descripción Dirección
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_ACTIV_17 BOOL R Esclavo operativo en el bus: dispositivo 17 %IWr.m.c.36.0
SLAVE_ACTIV_18 BOOL R Esclavo operativo en el bus: dispositivo 18 %IWr.m.c.36.1
SLAVE_ACTIV_19 BOOL R Esclavo operativo en el bus: dispositivo 19 %IWr.m.c.36.2
SLAVE_ACTIV_20 BOOL R Esclavo operativo en el bus: dispositivo 20 %IWr.m.c.36.3
SLAVE_ACTIV_21 BOOL R Esclavo operativo en el bus: dispositivo 21 %IWr.m.c.36.4
SLAVE_ACTIV_22 BOOL R Esclavo operativo en el bus: dispositivo 22 %IWr.m.c.36.5
SLAVE_ACTIV_23 BOOL R Esclavo operativo en el bus: dispositivo 23 %IWr.m.c.36.6
SLAVE_ACTIV_24 BOOL R Esclavo operativo en el bus: dispositivo 24 %IWr.m.c.36.7
SLAVE_ACTIV_25 BOOL R Esclavo operativo en el bus: dispositivo 25 %IWr.m.c.36.8
SLAVE_ACTIV_26 BOOL R Esclavo operativo en el bus: dispositivo 26 %IWr.m.c.36.9
SLAVE_ACTIV_27 BOOL R Esclavo operativo en el bus: dispositivo 27 %IWr.m.c.36.10
SLAVE_ACTIV_28 BOOL R Esclavo operativo en el bus: dispositivo 28 %IWr.m.c.36.11
SLAVE_ACTIV_29 BOOL R Esclavo operativo en el bus: dispositivo 29 %IWr.m.c.36.12
SLAVE_ACTIV_30 BOOL R Esclavo operativo en el bus: dispositivo 30 %IWr.m.c.36.13
SLAVE_ACTIV_31 BOOL R Esclavo operativo en el bus: dispositivo 31 %IWr.m.c.36.14
SLAVE_ACTIV_32 BOOL R Esclavo operativo en el bus: dispositivo 32 %IWr.m.c.36.15
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_ACTIV_33 BOOL R Esclavo operativo en el bus: dispositivo 33 %IWr.m.c.37.0
SLAVE_ACTIV_34 BOOL R Esclavo operativo en el bus: dispositivo 34 %IWr.m.c.37.1
SLAVE_ACTIV_35 BOOL R Esclavo operativo en el bus: dispositivo 35 %IWr.m.c.37.2
SLAVE_ACTIV_36 BOOL R Esclavo operativo en el bus: dispositivo 36 %IWr.m.c.37.3
SLAVE_ACTIV_37 BOOL R Esclavo operativo en el bus: dispositivo 37 %IWr.m.c.37.4
SLAVE_ACTIV_38 BOOL R Esclavo operativo en el bus: dispositivo 38 %IWr.m.c.37.5
218 35013947 04/2009
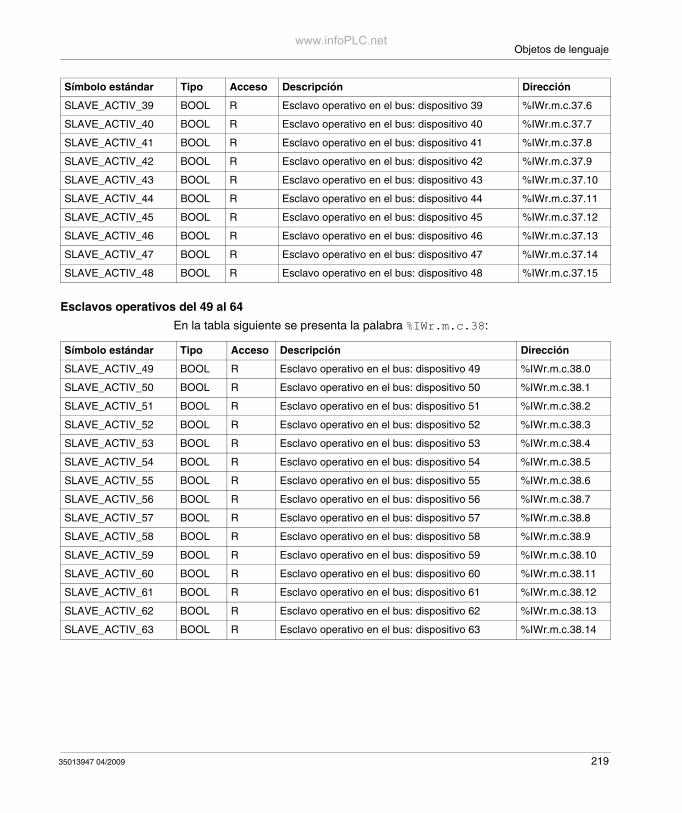
Objetos de lenguajewww.infoPLC.net
Esclavos operativos del 49 al 64
En la tabla siguiente se presenta la palabra %IWr.m.c.38:
SLAVE_ACTIV_39 BOOL R Esclavo operativo en el bus: dispositivo 39 %IWr.m.c.37.6
SLAVE_ACTIV_40 BOOL R Esclavo operativo en el bus: dispositivo 40 %IWr.m.c.37.7
SLAVE_ACTIV_41 BOOL R Esclavo operativo en el bus: dispositivo 41 %IWr.m.c.37.8
SLAVE_ACTIV_42 BOOL R Esclavo operativo en el bus: dispositivo 42 %IWr.m.c.37.9
SLAVE_ACTIV_43 BOOL R Esclavo operativo en el bus: dispositivo 43 %IWr.m.c.37.10
SLAVE_ACTIV_44 BOOL R Esclavo operativo en el bus: dispositivo 44 %IWr.m.c.37.11
SLAVE_ACTIV_45 BOOL R Esclavo operativo en el bus: dispositivo 45 %IWr.m.c.37.12
SLAVE_ACTIV_46 BOOL R Esclavo operativo en el bus: dispositivo 46 %IWr.m.c.37.13
SLAVE_ACTIV_47 BOOL R Esclavo operativo en el bus: dispositivo 47 %IWr.m.c.37.14
SLAVE_ACTIV_48 BOOL R Esclavo operativo en el bus: dispositivo 48 %IWr.m.c.37.15
Símbolo estándar Tipo Acceso Descripción Dirección
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_ACTIV_49 BOOL R Esclavo operativo en el bus: dispositivo 49 %IWr.m.c.38.0
SLAVE_ACTIV_50 BOOL R Esclavo operativo en el bus: dispositivo 50 %IWr.m.c.38.1
SLAVE_ACTIV_51 BOOL R Esclavo operativo en el bus: dispositivo 51 %IWr.m.c.38.2
SLAVE_ACTIV_52 BOOL R Esclavo operativo en el bus: dispositivo 52 %IWr.m.c.38.3
SLAVE_ACTIV_53 BOOL R Esclavo operativo en el bus: dispositivo 53 %IWr.m.c.38.4
SLAVE_ACTIV_54 BOOL R Esclavo operativo en el bus: dispositivo 54 %IWr.m.c.38.5
SLAVE_ACTIV_55 BOOL R Esclavo operativo en el bus: dispositivo 55 %IWr.m.c.38.6
SLAVE_ACTIV_56 BOOL R Esclavo operativo en el bus: dispositivo 56 %IWr.m.c.38.7
SLAVE_ACTIV_57 BOOL R Esclavo operativo en el bus: dispositivo 57 %IWr.m.c.38.8
SLAVE_ACTIV_58 BOOL R Esclavo operativo en el bus: dispositivo 58 %IWr.m.c.38.9
SLAVE_ACTIV_59 BOOL R Esclavo operativo en el bus: dispositivo 59 %IWr.m.c.38.10
SLAVE_ACTIV_60 BOOL R Esclavo operativo en el bus: dispositivo 60 %IWr.m.c.38.11
SLAVE_ACTIV_61 BOOL R Esclavo operativo en el bus: dispositivo 61 %IWr.m.c.38.12
SLAVE_ACTIV_62 BOOL R Esclavo operativo en el bus: dispositivo 62 %IWr.m.c.38.13
SLAVE_ACTIV_63 BOOL R Esclavo operativo en el bus: dispositivo 63 %IWr.m.c.38.14
35013947 04/2009 219
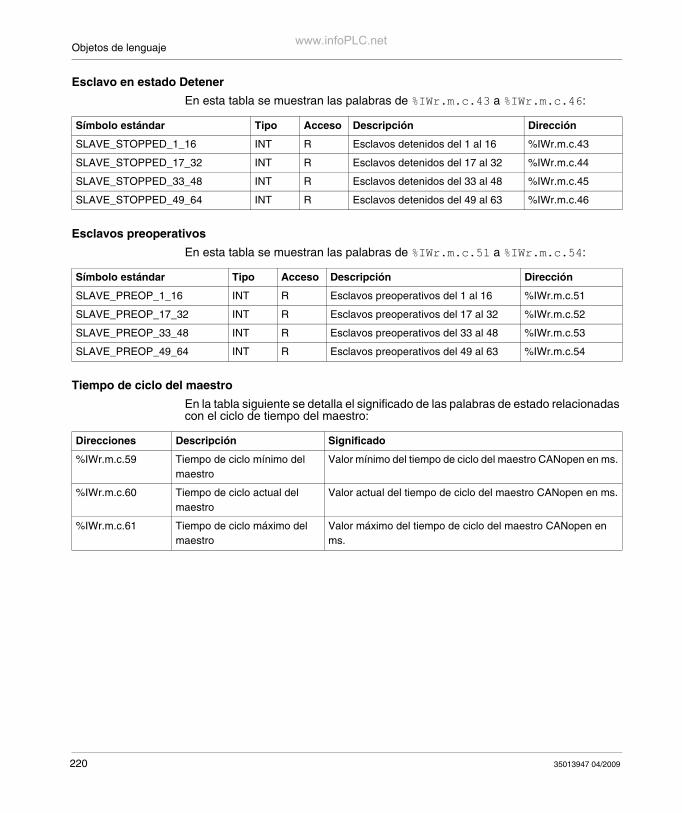
Objetos de lenguajewww.infoPLC.net
Esclavo en estado Detener
En esta tabla se muestran las palabras de %IWr.m.c.43 a %IWr.m.c.46:
Esclavos preoperativos
En esta tabla se muestran las palabras de %IWr.m.c.51 a %IWr.m.c.54:
Tiempo de ciclo del maestro
En la tabla siguiente se detalla el significado de las palabras de estado relacionadas con el ciclo de tiempo del maestro:
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_STOPPED_1_16 INT R Esclavos detenidos del 1 al 16 %IWr.m.c.43
SLAVE_STOPPED_17_32 INT R Esclavos detenidos del 17 al 32 %IWr.m.c.44
SLAVE_STOPPED_33_48 INT R Esclavos detenidos del 33 al 48 %IWr.m.c.45
SLAVE_STOPPED_49_64 INT R Esclavos detenidos del 49 al 63 %IWr.m.c.46
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_PREOP_1_16 INT R Esclavos preoperativos del 1 al 16 %IWr.m.c.51
SLAVE_PREOP_17_32 INT R Esclavos preoperativos del 17 al 32 %IWr.m.c.52
SLAVE_PREOP_33_48 INT R Esclavos preoperativos del 33 al 48 %IWr.m.c.53
SLAVE_PREOP_49_64 INT R Esclavos preoperativos del 49 al 63 %IWr.m.c.54
Direcciones Descripción Significado
%IWr.m.c.59 Tiempo de ciclo mínimo del maestro
Valor mínimo del tiempo de ciclo del maestro CANopen en ms.
%IWr.m.c.60 Tiempo de ciclo actual del maestro
Valor actual del tiempo de ciclo del maestro CANopen en ms.
%IWr.m.c.61 Tiempo de ciclo máximo del maestro
Valor máximo del tiempo de ciclo del maestro CANopen en ms.
220 35013947 04/2009
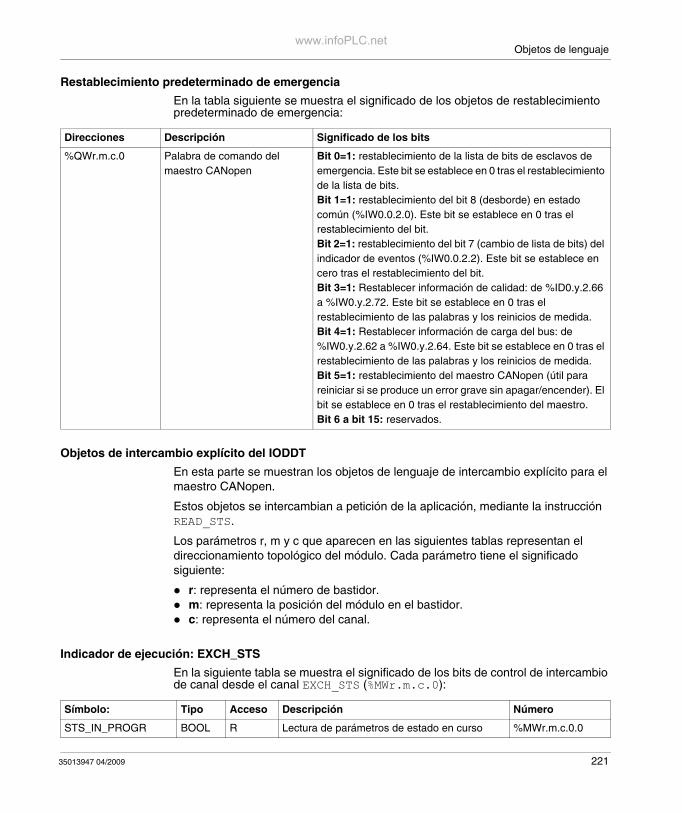
Objetos de lenguajewww.infoPLC.net
Restablecimiento predeterminado de emergencia
En la tabla siguiente se muestra el significado de los objetos de restablecimiento predeterminado de emergencia:
Objetos de intercambio explícito del IODDT
En esta parte se muestran los objetos de lenguaje de intercambio explícito para el maestro CANopen.
Estos objetos se intercambian a petición de la aplicación, mediante la instrucción READ_STS.
Los parámetros r, m y c que aparecen en las siguientes tablas representan el direccionamiento topológico del módulo. Cada parámetro tiene el significado siguiente:
r: representa el número de bastidor. m: representa la posición del módulo en el bastidor. c: representa el número del canal.
Indicador de ejecución: EXCH_STS
En la siguiente tabla se muestra el significado de los bits de control de intercambio de canal desde el canal EXCH_STS (%MWr.m.c.0):
Direcciones Descripción Significado de los bits
%QWr.m.c.0 Palabra de comando del maestro CANopen
Bit 0=1: restablecimiento de la lista de bits de esclavos de emergencia. Este bit se establece en 0 tras el restablecimiento de la lista de bits.Bit 1=1: restablecimiento del bit 8 (desborde) en estado común (%IW0.0.2.0). Este bit se establece en 0 tras el restablecimiento del bit.Bit 2=1: restablecimiento del bit 7 (cambio de lista de bits) del indicador de eventos (%IW0.0.2.2). Este bit se establece en cero tras el restablecimiento del bit.Bit 3=1: Restablecer información de calidad: de %ID0.y.2.66 a %IW0.y.2.72. Este bit se establece en 0 tras el restablecimiento de las palabras y los reinicios de medida. Bit 4=1: Restablecer información de carga del bus: de %IW0.y.2.62 a %IW0.y.2.64. Este bit se establece en 0 tras el restablecimiento de las palabras y los reinicios de medida. Bit 5=1: restablecimiento del maestro CANopen (útil para reiniciar si se produce un error grave sin apagar/encender). El bit se establece en 0 tras el restablecimiento del maestro.Bit 6 a bit 15: reservados.
Símbolo: Tipo Acceso Descripción Número
STS_IN_PROGR BOOL R Lectura de parámetros de estado en curso %MWr.m.c.0.0
35013947 04/2009 221
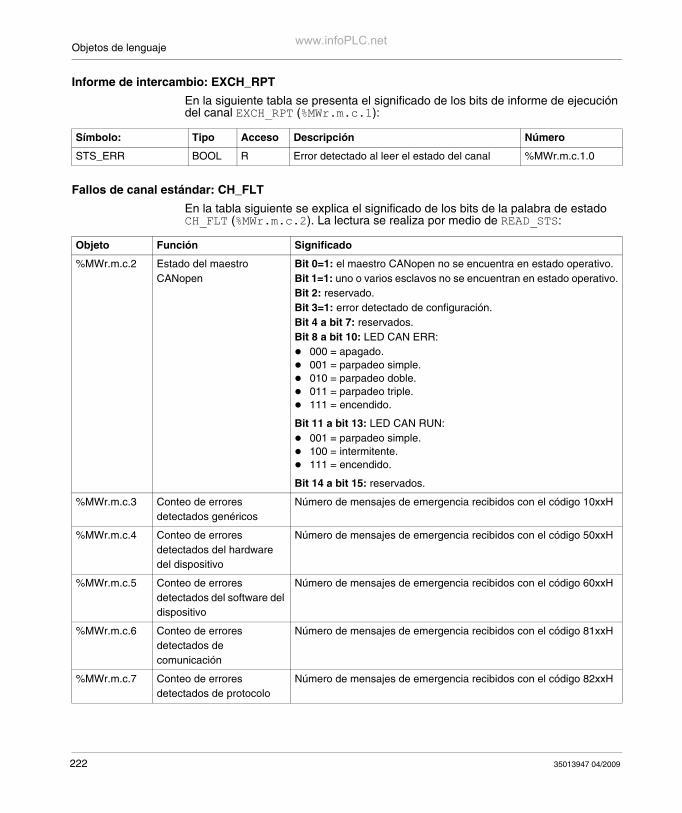
Objetos de lenguajewww.infoPLC.net
Informe de intercambio: EXCH_RPT
En la siguiente tabla se presenta el significado de los bits de informe de ejecución del canal EXCH_RPT (%MWr.m.c.1):
Fallos de canal estándar: CH_FLT
En la tabla siguiente se explica el significado de los bits de la palabra de estado CH_FLT (%MWr.m.c.2). La lectura se realiza por medio de READ_STS:
Símbolo: Tipo Acceso Descripción Número
STS_ERR BOOL R Error detectado al leer el estado del canal %MWr.m.c.1.0
Objeto Función Significado
%MWr.m.c.2 Estado del maestro CANopen
Bit 0=1: el maestro CANopen no se encuentra en estado operativo.Bit 1=1: uno o varios esclavos no se encuentran en estado operativo.Bit 2: reservado.Bit 3=1: error detectado de configuración.Bit 4 a bit 7: reservados.Bit 8 a bit 10: LED CAN ERR: 000 = apagado. 001 = parpadeo simple. 010 = parpadeo doble. 011 = parpadeo triple. 111 = encendido.
Bit 11 a bit 13: LED CAN RUN: 001 = parpadeo simple. 100 = intermitente. 111 = encendido.
Bit 14 a bit 15: reservados.
%MWr.m.c.3 Conteo de errores detectados genéricos
Número de mensajes de emergencia recibidos con el código 10xxH
%MWr.m.c.4 Conteo de errores detectados del hardware del dispositivo
Número de mensajes de emergencia recibidos con el código 50xxH
%MWr.m.c.5 Conteo de errores detectados del software del dispositivo
Número de mensajes de emergencia recibidos con el código 60xxH
%MWr.m.c.6 Conteo de errores detectados de comunicación
Número de mensajes de emergencia recibidos con el código 81xxH
%MWr.m.c.7 Conteo de errores detectados de protocolo
Número de mensajes de emergencia recibidos con el código 82xxH
222 35013947 04/2009
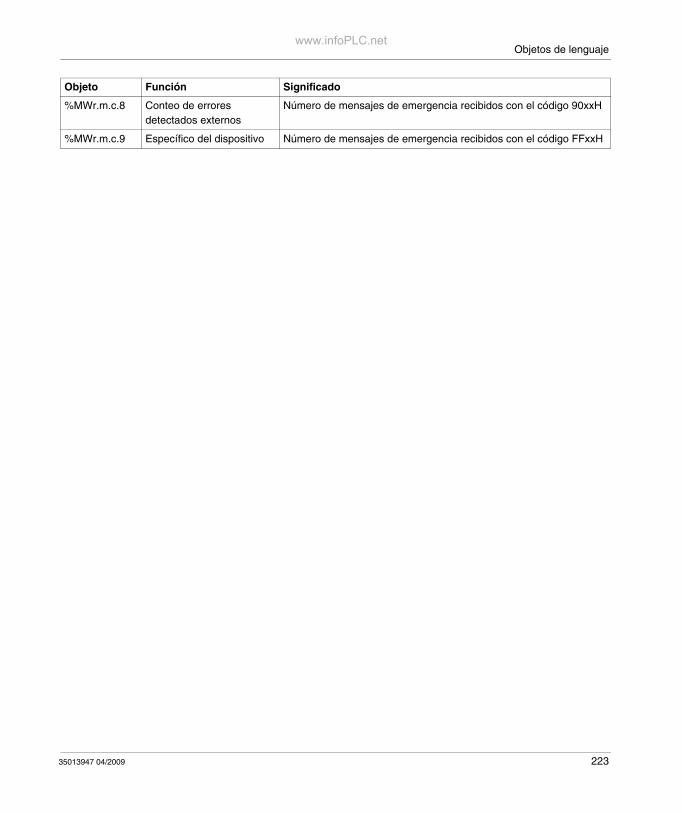
Objetos de lenguajewww.infoPLC.net
%MWr.m.c.8 Conteo de errores detectados externos
Número de mensajes de emergencia recibidos con el código 90xxH
%MWr.m.c.9 Específico del dispositivo Número de mensajes de emergencia recibidos con el código FFxxH
Objeto Función Significado
35013947 04/2009 223
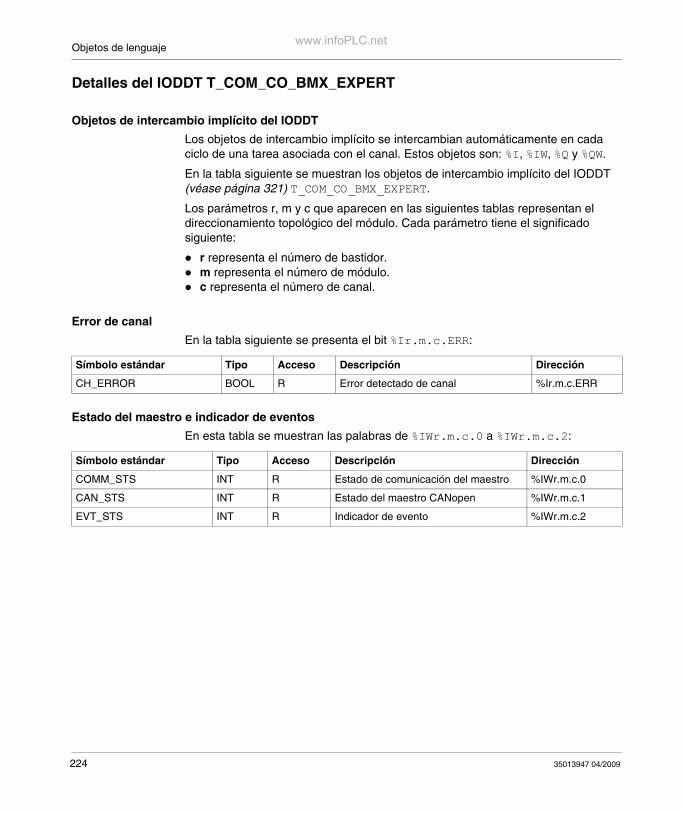
Objetos de lenguajewww.infoPLC.net
Detalles del IODDT T_COM_CO_BMX_EXPERT
Objetos de intercambio implícito del IODDT
Los objetos de intercambio implícito se intercambian automáticamente en cada ciclo de una tarea asociada con el canal. Estos objetos son: %I, %IW, %Q y %QW.
En la tabla siguiente se muestran los objetos de intercambio implícito del IODDT (véase página 321) T_COM_CO_BMX_EXPERT.
Los parámetros r, m y c que aparecen en las siguientes tablas representan el direccionamiento topológico del módulo. Cada parámetro tiene el significado siguiente:
r representa el número de bastidor. m representa el número de módulo. c representa el número de canal.
Error de canal
En la tabla siguiente se presenta el bit %Ir.m.c.ERR:
Estado del maestro e indicador de eventos
En esta tabla se muestran las palabras de %IWr.m.c.0 a %IWr.m.c.2:
Símbolo estándar Tipo Acceso Descripción Dirección
CH_ERROR BOOL R Error detectado de canal %Ir.m.c.ERR
Símbolo estándar Tipo Acceso Descripción Dirección
COMM_STS INT R Estado de comunicación del maestro %IWr.m.c.0
CAN_STS INT R Estado del maestro CANopen %IWr.m.c.1
EVT_STS INT R Indicador de evento %IWr.m.c.2
224 35013947 04/2009
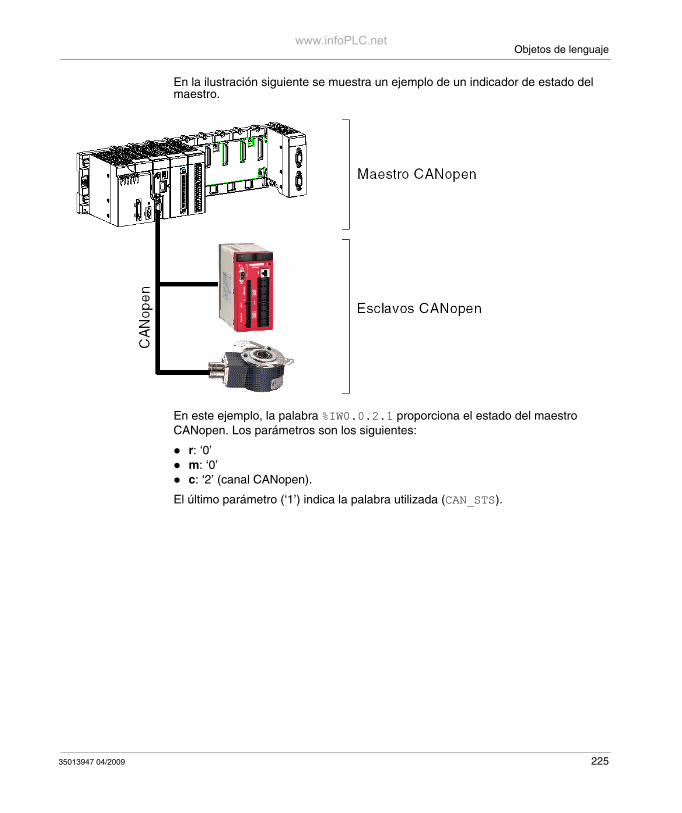
Objetos de lenguajewww.infoPLC.net
En la ilustración siguiente se muestra un ejemplo de un indicador de estado del maestro.
En este ejemplo, la palabra %IW0.0.2.1 proporciona el estado del maestro CANopen. Los parámetros son los siguientes:
r: ‘0’ m: ‘0’ c: ‘2’ (canal CANopen).
El último parámetro (‘1’) indica la palabra utilizada (CAN_STS).
35013947 04/2009 225
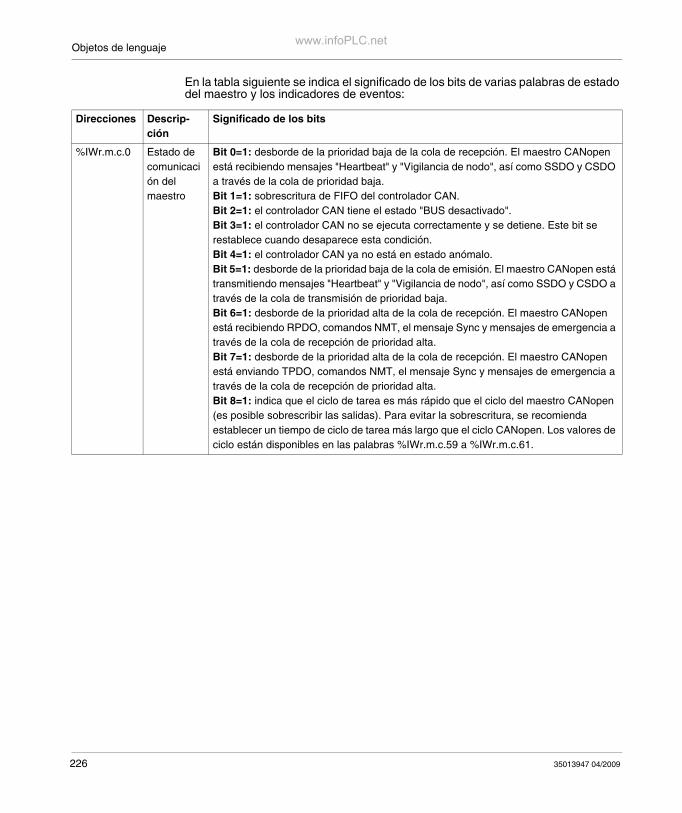
Objetos de lenguajewww.infoPLC.net
En la tabla siguiente se indica el significado de los bits de varias palabras de estado del maestro y los indicadores de eventos:
Direcciones Descrip-ción
Significado de los bits
%IWr.m.c.0 Estado de comunicación del maestro
Bit 0=1: desborde de la prioridad baja de la cola de recepción. El maestro CANopen está recibiendo mensajes "Heartbeat" y "Vigilancia de nodo", así como SSDO y CSDO a través de la cola de prioridad baja. Bit 1=1: sobrescritura de FIFO del controlador CAN.Bit 2=1: el controlador CAN tiene el estado "BUS desactivado". Bit 3=1: el controlador CAN no se ejecuta correctamente y se detiene. Este bit se restablece cuando desaparece esta condición.Bit 4=1: el controlador CAN ya no está en estado anómalo.Bit 5=1: desborde de la prioridad baja de la cola de emisión. El maestro CANopen está transmitiendo mensajes "Heartbeat" y "Vigilancia de nodo", así como SSDO y CSDO a través de la cola de transmisión de prioridad baja.Bit 6=1: desborde de la prioridad alta de la cola de recepción. El maestro CANopen está recibiendo RPDO, comandos NMT, el mensaje Sync y mensajes de emergencia a través de la cola de recepción de prioridad alta.Bit 7=1: desborde de la prioridad alta de la cola de recepción. El maestro CANopen está enviando TPDO, comandos NMT, el mensaje Sync y mensajes de emergencia a través de la cola de recepción de prioridad alta.Bit 8=1: indica que el ciclo de tarea es más rápido que el ciclo del maestro CANopen (es posible sobrescribir las salidas). Para evitar la sobrescritura, se recomienda establecer un tiempo de ciclo de tarea más largo que el ciclo CANopen. Los valores de ciclo están disponibles en las palabras %IWr.m.c.59 a %IWr.m.c.61.
226 35013947 04/2009
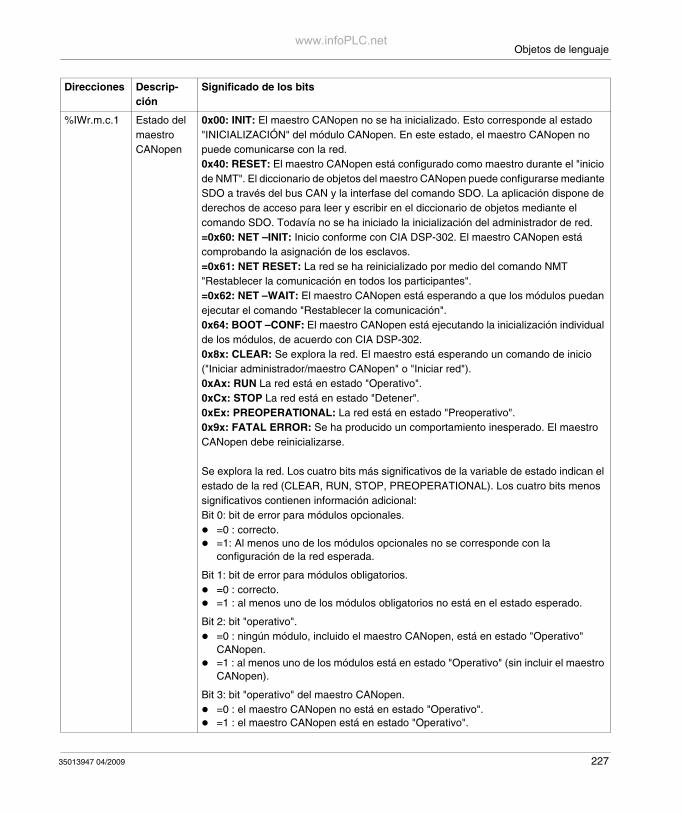
Objetos de lenguajewww.infoPLC.net
%IWr.m.c.1 Estado del maestro CANopen
0x00: INIT: El maestro CANopen no se ha inicializado. Esto corresponde al estado "INICIALIZACIÓN" del módulo CANopen. En este estado, el maestro CANopen no puede comunicarse con la red.0x40: RESET: El maestro CANopen está configurado como maestro durante el "inicio de NMT". El diccionario de objetos del maestro CANopen puede configurarse mediante SDO a través del bus CAN y la interfase del comando SDO. La aplicación dispone de derechos de acceso para leer y escribir en el diccionario de objetos mediante el comando SDO. Todavía no se ha iniciado la inicialización del administrador de red.=0x60: NET –INIT: Inicio conforme con CIA DSP-302. El maestro CANopen está comprobando la asignación de los esclavos.=0x61: NET RESET: La red se ha reinicializado por medio del comando NMT "Restablecer la comunicación en todos los participantes".=0x62: NET –WAIT: El maestro CANopen está esperando a que los módulos puedan ejecutar el comando "Restablecer la comunicación".0x64: BOOT –CONF: El maestro CANopen está ejecutando la inicialización individual de los módulos, de acuerdo con CIA DSP-302.0x8x: CLEAR: Se explora la red. El maestro está esperando un comando de inicio ("Iniciar administrador/maestro CANopen" o "Iniciar red"). 0xAx: RUN La red está en estado "Operativo".0xCx: STOP La red está en estado "Detener".0xEx: PREOPERATIONAL: La red está en estado "Preoperativo".0x9x: FATAL ERROR: Se ha producido un comportamiento inesperado. El maestro CANopen debe reinicializarse.
Se explora la red. Los cuatro bits más significativos de la variable de estado indican el estado de la red (CLEAR, RUN, STOP, PREOPERATIONAL). Los cuatro bits menos significativos contienen información adicional:Bit 0: bit de error para módulos opcionales. =0 : correcto. =1: Al menos uno de los módulos opcionales no se corresponde con la
configuración de la red esperada.
Bit 1: bit de error para módulos obligatorios. =0 : correcto. =1 : al menos uno de los módulos obligatorios no está en el estado esperado.
Bit 2: bit "operativo". =0 : ningún módulo, incluido el maestro CANopen, está en estado "Operativo"
CANopen. =1 : al menos uno de los módulos está en estado "Operativo" (sin incluir el maestro
CANopen).
Bit 3: bit "operativo" del maestro CANopen. =0 : el maestro CANopen no está en estado "Operativo". =1 : el maestro CANopen está en estado "Operativo".
Direcciones Descrip-ción
Significado de los bits
35013947 04/2009 227
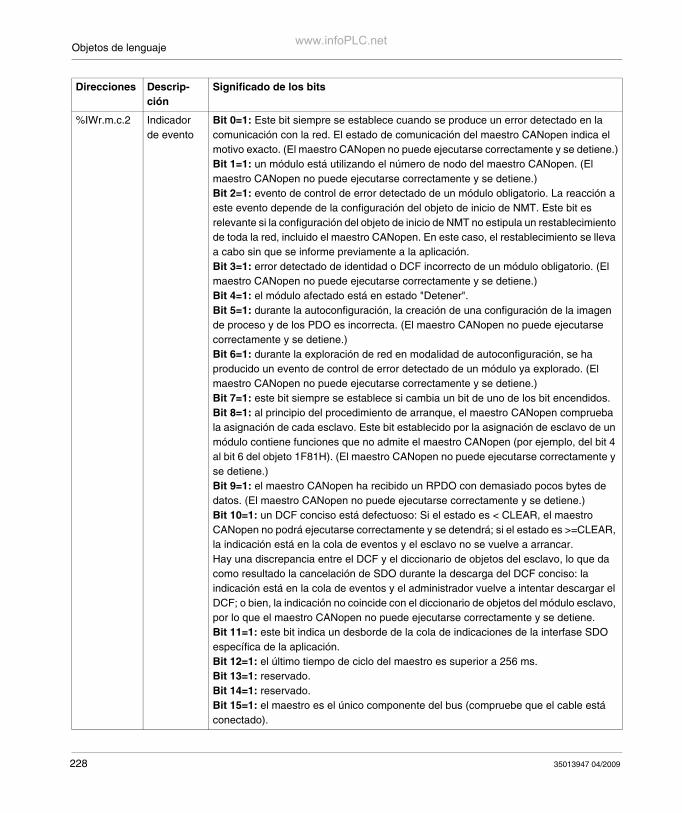
Objetos de lenguajewww.infoPLC.net
%IWr.m.c.2 Indicador de evento
Bit 0=1: Este bit siempre se establece cuando se produce un error detectado en la comunicación con la red. El estado de comunicación del maestro CANopen indica el motivo exacto. (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 1=1: un módulo está utilizando el número de nodo del maestro CANopen. (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 2=1: evento de control de error detectado de un módulo obligatorio. La reacción a este evento depende de la configuración del objeto de inicio de NMT. Este bit es relevante si la configuración del objeto de inicio de NMT no estipula un restablecimiento de toda la red, incluido el maestro CANopen. En este caso, el restablecimiento se lleva a cabo sin que se informe previamente a la aplicación.Bit 3=1: error detectado de identidad o DCF incorrecto de un módulo obligatorio. (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 4=1: el módulo afectado está en estado "Detener".Bit 5=1: durante la autoconfiguración, la creación de una configuración de la imagen de proceso y de los PDO es incorrecta. (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 6=1: durante la exploración de red en modalidad de autoconfiguración, se ha producido un evento de control de error detectado de un módulo ya explorado. (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 7=1: este bit siempre se establece si cambia un bit de uno de los bit encendidos.Bit 8=1: al principio del procedimiento de arranque, el maestro CANopen comprueba la asignación de cada esclavo. Este bit establecido por la asignación de esclavo de un módulo contiene funciones que no admite el maestro CANopen (por ejemplo, del bit 4 al bit 6 del objeto 1F81H). (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 9=1: el maestro CANopen ha recibido un RPDO con demasiado pocos bytes de datos. (El maestro CANopen no puede ejecutarse correctamente y se detiene.)Bit 10=1: un DCF conciso está defectuoso: Si el estado es < CLEAR, el maestro CANopen no podrá ejecutarse correctamente y se detendrá; si el estado es >=CLEAR, la indicación está en la cola de eventos y el esclavo no se vuelve a arrancar. Hay una discrepancia entre el DCF y el diccionario de objetos del esclavo, lo que da como resultado la cancelación de SDO durante la descarga del DCF conciso: la indicación está en la cola de eventos y el administrador vuelve a intentar descargar el DCF; o bien, la indicación no coincide con el diccionario de objetos del módulo esclavo, por lo que el maestro CANopen no puede ejecutarse correctamente y se detiene.Bit 11=1: este bit indica un desborde de la cola de indicaciones de la interfase SDO específica de la aplicación.Bit 12=1: el último tiempo de ciclo del maestro es superior a 256 ms.Bit 13=1: reservado.Bit 14=1: reservado.Bit 15=1: el maestro es el único componente del bus (compruebe que el cable está conectado).
Direcciones Descrip-ción
Significado de los bits
228 35013947 04/2009
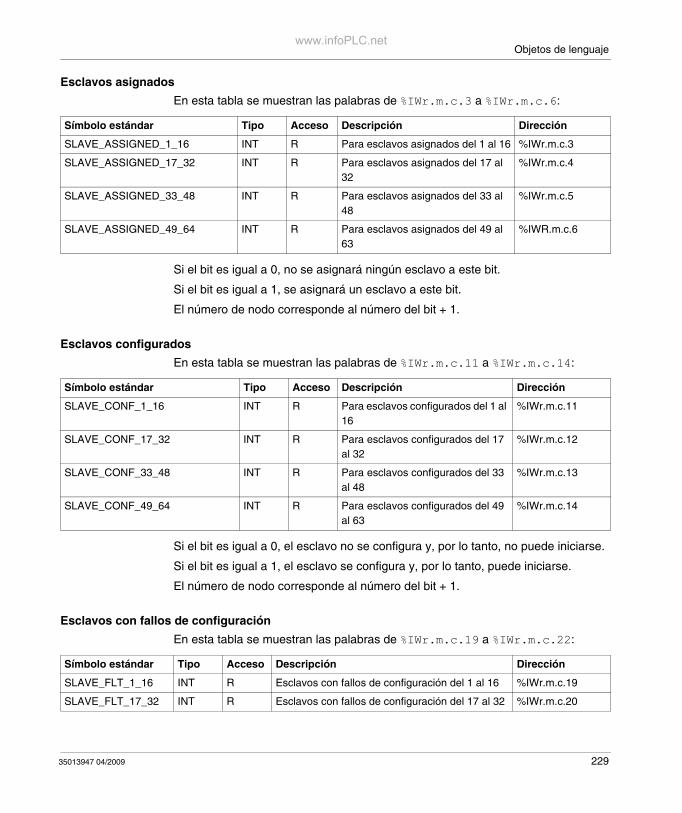
Objetos de lenguajewww.infoPLC.net
Esclavos asignados
En esta tabla se muestran las palabras de %IWr.m.c.3 a %IWr.m.c.6:
Si el bit es igual a 0, no se asignará ningún esclavo a este bit.
Si el bit es igual a 1, se asignará un esclavo a este bit.
El número de nodo corresponde al número del bit + 1.
Esclavos configurados
En esta tabla se muestran las palabras de %IWr.m.c.11 a %IWr.m.c.14:
Si el bit es igual a 0, el esclavo no se configura y, por lo tanto, no puede iniciarse.
Si el bit es igual a 1, el esclavo se configura y, por lo tanto, puede iniciarse.
El número de nodo corresponde al número del bit + 1.
Esclavos con fallos de configuración
En esta tabla se muestran las palabras de %IWr.m.c.19 a %IWr.m.c.22:
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_ASSIGNED_1_16 INT R Para esclavos asignados del 1 al 16 %IWr.m.c.3
SLAVE_ASSIGNED_17_32 INT R Para esclavos asignados del 17 al 32
%IWr.m.c.4
SLAVE_ASSIGNED_33_48 INT R Para esclavos asignados del 33 al 48
%IWr.m.c.5
SLAVE_ASSIGNED_49_64 INT R Para esclavos asignados del 49 al 63
%IWR.m.c.6
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_CONF_1_16 INT R Para esclavos configurados del 1 al 16
%IWr.m.c.11
SLAVE_CONF_17_32 INT R Para esclavos configurados del 17 al 32
%IWr.m.c.12
SLAVE_CONF_33_48 INT R Para esclavos configurados del 33 al 48
%IWr.m.c.13
SLAVE_CONF_49_64 INT R Para esclavos configurados del 49 al 63
%IWr.m.c.14
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_FLT_1_16 INT R Esclavos con fallos de configuración del 1 al 16 %IWr.m.c.19
SLAVE_FLT_17_32 INT R Esclavos con fallos de configuración del 17 al 32 %IWr.m.c.20
35013947 04/2009 229
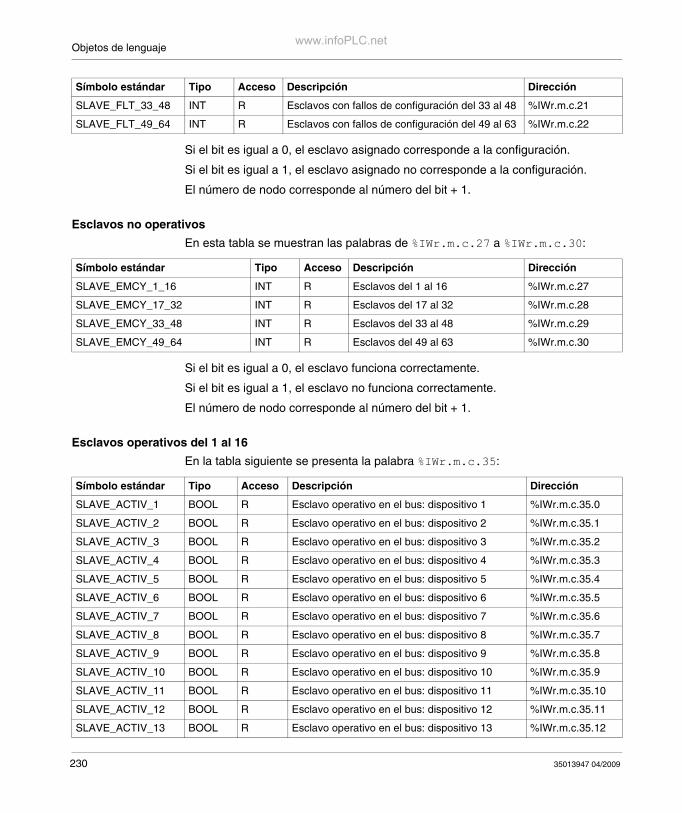
Objetos de lenguajewww.infoPLC.net
Si el bit es igual a 0, el esclavo asignado corresponde a la configuración.
Si el bit es igual a 1, el esclavo asignado no corresponde a la configuración.
El número de nodo corresponde al número del bit + 1.
Esclavos no operativos
En esta tabla se muestran las palabras de %IWr.m.c.27 a %IWr.m.c.30:
Si el bit es igual a 0, el esclavo funciona correctamente.
Si el bit es igual a 1, el esclavo no funciona correctamente.
El número de nodo corresponde al número del bit + 1.
Esclavos operativos del 1 al 16
En la tabla siguiente se presenta la palabra %IWr.m.c.35:
SLAVE_FLT_33_48 INT R Esclavos con fallos de configuración del 33 al 48 %IWr.m.c.21
SLAVE_FLT_49_64 INT R Esclavos con fallos de configuración del 49 al 63 %IWr.m.c.22
Símbolo estándar Tipo Acceso Descripción Dirección
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_EMCY_1_16 INT R Esclavos del 1 al 16 %IWr.m.c.27
SLAVE_EMCY_17_32 INT R Esclavos del 17 al 32 %IWr.m.c.28
SLAVE_EMCY_33_48 INT R Esclavos del 33 al 48 %IWr.m.c.29
SLAVE_EMCY_49_64 INT R Esclavos del 49 al 63 %IWr.m.c.30
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_ACTIV_1 BOOL R Esclavo operativo en el bus: dispositivo 1 %IWr.m.c.35.0
SLAVE_ACTIV_2 BOOL R Esclavo operativo en el bus: dispositivo 2 %IWr.m.c.35.1
SLAVE_ACTIV_3 BOOL R Esclavo operativo en el bus: dispositivo 3 %IWr.m.c.35.2
SLAVE_ACTIV_4 BOOL R Esclavo operativo en el bus: dispositivo 4 %IWr.m.c.35.3
SLAVE_ACTIV_5 BOOL R Esclavo operativo en el bus: dispositivo 5 %IWr.m.c.35.4
SLAVE_ACTIV_6 BOOL R Esclavo operativo en el bus: dispositivo 6 %IWr.m.c.35.5
SLAVE_ACTIV_7 BOOL R Esclavo operativo en el bus: dispositivo 7 %IWr.m.c.35.6
SLAVE_ACTIV_8 BOOL R Esclavo operativo en el bus: dispositivo 8 %IWr.m.c.35.7
SLAVE_ACTIV_9 BOOL R Esclavo operativo en el bus: dispositivo 9 %IWr.m.c.35.8
SLAVE_ACTIV_10 BOOL R Esclavo operativo en el bus: dispositivo 10 %IWr.m.c.35.9
SLAVE_ACTIV_11 BOOL R Esclavo operativo en el bus: dispositivo 11 %IWr.m.c.35.10
SLAVE_ACTIV_12 BOOL R Esclavo operativo en el bus: dispositivo 12 %IWr.m.c.35.11
SLAVE_ACTIV_13 BOOL R Esclavo operativo en el bus: dispositivo 13 %IWr.m.c.35.12
230 35013947 04/2009
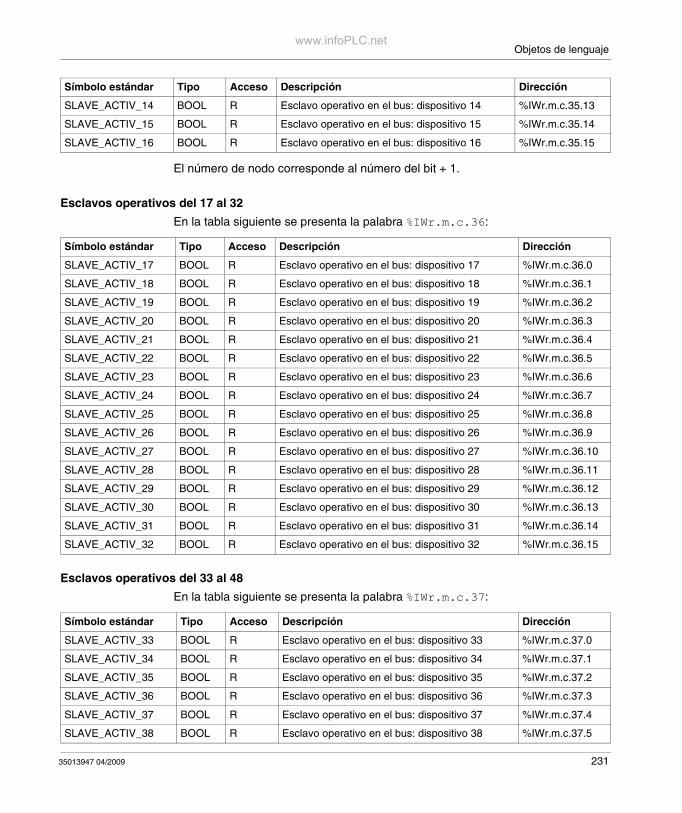
Objetos de lenguajewww.infoPLC.net
El número de nodo corresponde al número del bit + 1.
Esclavos operativos del 17 al 32
En la tabla siguiente se presenta la palabra %IWr.m.c.36:
Esclavos operativos del 33 al 48
En la tabla siguiente se presenta la palabra %IWr.m.c.37:
SLAVE_ACTIV_14 BOOL R Esclavo operativo en el bus: dispositivo 14 %IWr.m.c.35.13
SLAVE_ACTIV_15 BOOL R Esclavo operativo en el bus: dispositivo 15 %IWr.m.c.35.14
SLAVE_ACTIV_16 BOOL R Esclavo operativo en el bus: dispositivo 16 %IWr.m.c.35.15
Símbolo estándar Tipo Acceso Descripción Dirección
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_ACTIV_17 BOOL R Esclavo operativo en el bus: dispositivo 17 %IWr.m.c.36.0
SLAVE_ACTIV_18 BOOL R Esclavo operativo en el bus: dispositivo 18 %IWr.m.c.36.1
SLAVE_ACTIV_19 BOOL R Esclavo operativo en el bus: dispositivo 19 %IWr.m.c.36.2
SLAVE_ACTIV_20 BOOL R Esclavo operativo en el bus: dispositivo 20 %IWr.m.c.36.3
SLAVE_ACTIV_21 BOOL R Esclavo operativo en el bus: dispositivo 21 %IWr.m.c.36.4
SLAVE_ACTIV_22 BOOL R Esclavo operativo en el bus: dispositivo 22 %IWr.m.c.36.5
SLAVE_ACTIV_23 BOOL R Esclavo operativo en el bus: dispositivo 23 %IWr.m.c.36.6
SLAVE_ACTIV_24 BOOL R Esclavo operativo en el bus: dispositivo 24 %IWr.m.c.36.7
SLAVE_ACTIV_25 BOOL R Esclavo operativo en el bus: dispositivo 25 %IWr.m.c.36.8
SLAVE_ACTIV_26 BOOL R Esclavo operativo en el bus: dispositivo 26 %IWr.m.c.36.9
SLAVE_ACTIV_27 BOOL R Esclavo operativo en el bus: dispositivo 27 %IWr.m.c.36.10
SLAVE_ACTIV_28 BOOL R Esclavo operativo en el bus: dispositivo 28 %IWr.m.c.36.11
SLAVE_ACTIV_29 BOOL R Esclavo operativo en el bus: dispositivo 29 %IWr.m.c.36.12
SLAVE_ACTIV_30 BOOL R Esclavo operativo en el bus: dispositivo 30 %IWr.m.c.36.13
SLAVE_ACTIV_31 BOOL R Esclavo operativo en el bus: dispositivo 31 %IWr.m.c.36.14
SLAVE_ACTIV_32 BOOL R Esclavo operativo en el bus: dispositivo 32 %IWr.m.c.36.15
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_ACTIV_33 BOOL R Esclavo operativo en el bus: dispositivo 33 %IWr.m.c.37.0
SLAVE_ACTIV_34 BOOL R Esclavo operativo en el bus: dispositivo 34 %IWr.m.c.37.1
SLAVE_ACTIV_35 BOOL R Esclavo operativo en el bus: dispositivo 35 %IWr.m.c.37.2
SLAVE_ACTIV_36 BOOL R Esclavo operativo en el bus: dispositivo 36 %IWr.m.c.37.3
SLAVE_ACTIV_37 BOOL R Esclavo operativo en el bus: dispositivo 37 %IWr.m.c.37.4
SLAVE_ACTIV_38 BOOL R Esclavo operativo en el bus: dispositivo 38 %IWr.m.c.37.5
35013947 04/2009 231
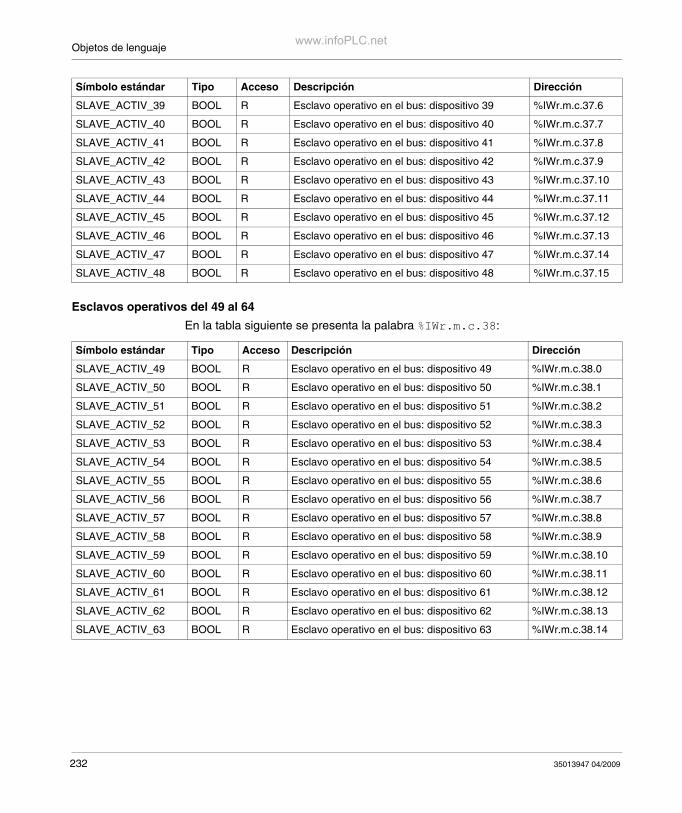
Objetos de lenguajewww.infoPLC.net
Esclavos operativos del 49 al 64
En la tabla siguiente se presenta la palabra %IWr.m.c.38:
SLAVE_ACTIV_39 BOOL R Esclavo operativo en el bus: dispositivo 39 %IWr.m.c.37.6
SLAVE_ACTIV_40 BOOL R Esclavo operativo en el bus: dispositivo 40 %IWr.m.c.37.7
SLAVE_ACTIV_41 BOOL R Esclavo operativo en el bus: dispositivo 41 %IWr.m.c.37.8
SLAVE_ACTIV_42 BOOL R Esclavo operativo en el bus: dispositivo 42 %IWr.m.c.37.9
SLAVE_ACTIV_43 BOOL R Esclavo operativo en el bus: dispositivo 43 %IWr.m.c.37.10
SLAVE_ACTIV_44 BOOL R Esclavo operativo en el bus: dispositivo 44 %IWr.m.c.37.11
SLAVE_ACTIV_45 BOOL R Esclavo operativo en el bus: dispositivo 45 %IWr.m.c.37.12
SLAVE_ACTIV_46 BOOL R Esclavo operativo en el bus: dispositivo 46 %IWr.m.c.37.13
SLAVE_ACTIV_47 BOOL R Esclavo operativo en el bus: dispositivo 47 %IWr.m.c.37.14
SLAVE_ACTIV_48 BOOL R Esclavo operativo en el bus: dispositivo 48 %IWr.m.c.37.15
Símbolo estándar Tipo Acceso Descripción Dirección
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_ACTIV_49 BOOL R Esclavo operativo en el bus: dispositivo 49 %IWr.m.c.38.0
SLAVE_ACTIV_50 BOOL R Esclavo operativo en el bus: dispositivo 50 %IWr.m.c.38.1
SLAVE_ACTIV_51 BOOL R Esclavo operativo en el bus: dispositivo 51 %IWr.m.c.38.2
SLAVE_ACTIV_52 BOOL R Esclavo operativo en el bus: dispositivo 52 %IWr.m.c.38.3
SLAVE_ACTIV_53 BOOL R Esclavo operativo en el bus: dispositivo 53 %IWr.m.c.38.4
SLAVE_ACTIV_54 BOOL R Esclavo operativo en el bus: dispositivo 54 %IWr.m.c.38.5
SLAVE_ACTIV_55 BOOL R Esclavo operativo en el bus: dispositivo 55 %IWr.m.c.38.6
SLAVE_ACTIV_56 BOOL R Esclavo operativo en el bus: dispositivo 56 %IWr.m.c.38.7
SLAVE_ACTIV_57 BOOL R Esclavo operativo en el bus: dispositivo 57 %IWr.m.c.38.8
SLAVE_ACTIV_58 BOOL R Esclavo operativo en el bus: dispositivo 58 %IWr.m.c.38.9
SLAVE_ACTIV_59 BOOL R Esclavo operativo en el bus: dispositivo 59 %IWr.m.c.38.10
SLAVE_ACTIV_60 BOOL R Esclavo operativo en el bus: dispositivo 60 %IWr.m.c.38.11
SLAVE_ACTIV_61 BOOL R Esclavo operativo en el bus: dispositivo 61 %IWr.m.c.38.12
SLAVE_ACTIV_62 BOOL R Esclavo operativo en el bus: dispositivo 62 %IWr.m.c.38.13
SLAVE_ACTIV_63 BOOL R Esclavo operativo en el bus: dispositivo 63 %IWr.m.c.38.14
232 35013947 04/2009
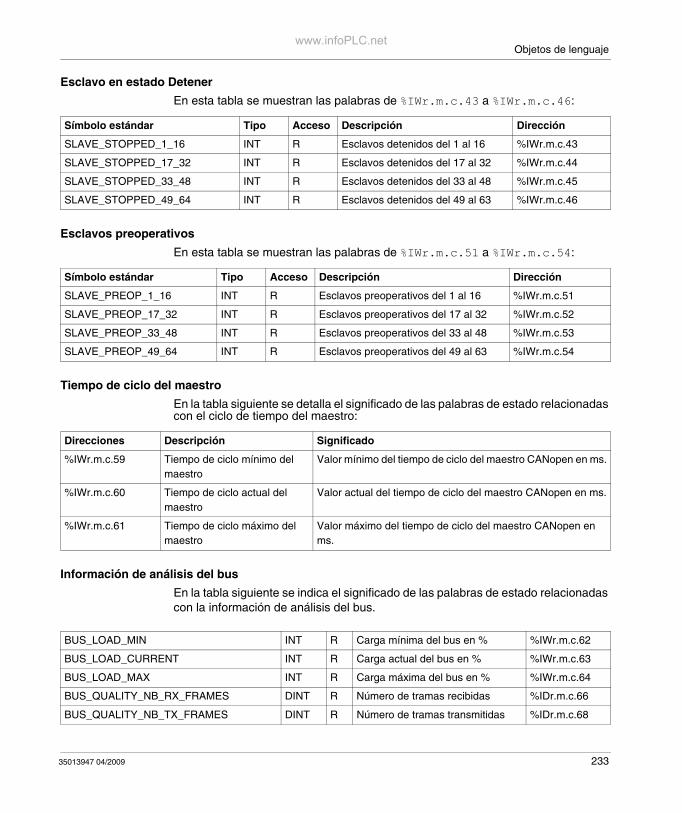
Objetos de lenguajewww.infoPLC.net
Esclavo en estado Detener
En esta tabla se muestran las palabras de %IWr.m.c.43 a %IWr.m.c.46:
Esclavos preoperativos
En esta tabla se muestran las palabras de %IWr.m.c.51 a %IWr.m.c.54:
Tiempo de ciclo del maestro
En la tabla siguiente se detalla el significado de las palabras de estado relacionadas con el ciclo de tiempo del maestro:
Información de análisis del bus
En la tabla siguiente se indica el significado de las palabras de estado relacionadas con la información de análisis del bus.
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_STOPPED_1_16 INT R Esclavos detenidos del 1 al 16 %IWr.m.c.43
SLAVE_STOPPED_17_32 INT R Esclavos detenidos del 17 al 32 %IWr.m.c.44
SLAVE_STOPPED_33_48 INT R Esclavos detenidos del 33 al 48 %IWr.m.c.45
SLAVE_STOPPED_49_64 INT R Esclavos detenidos del 49 al 63 %IWr.m.c.46
Símbolo estándar Tipo Acceso Descripción Dirección
SLAVE_PREOP_1_16 INT R Esclavos preoperativos del 1 al 16 %IWr.m.c.51
SLAVE_PREOP_17_32 INT R Esclavos preoperativos del 17 al 32 %IWr.m.c.52
SLAVE_PREOP_33_48 INT R Esclavos preoperativos del 33 al 48 %IWr.m.c.53
SLAVE_PREOP_49_64 INT R Esclavos preoperativos del 49 al 63 %IWr.m.c.54
Direcciones Descripción Significado
%IWr.m.c.59 Tiempo de ciclo mínimo del maestro
Valor mínimo del tiempo de ciclo del maestro CANopen en ms.
%IWr.m.c.60 Tiempo de ciclo actual del maestro
Valor actual del tiempo de ciclo del maestro CANopen en ms.
%IWr.m.c.61 Tiempo de ciclo máximo del maestro
Valor máximo del tiempo de ciclo del maestro CANopen en ms.
BUS_LOAD_MIN INT R Carga mínima del bus en % %IWr.m.c.62
BUS_LOAD_CURRENT INT R Carga actual del bus en % %IWr.m.c.63
BUS_LOAD_MAX INT R Carga máxima del bus en % %IWr.m.c.64
BUS_QUALITY_NB_RX_FRAMES DINT R Número de tramas recibidas %IDr.m.c.66
BUS_QUALITY_NB_TX_FRAMES DINT R Número de tramas transmitidas %IDr.m.c.68
35013947 04/2009 233
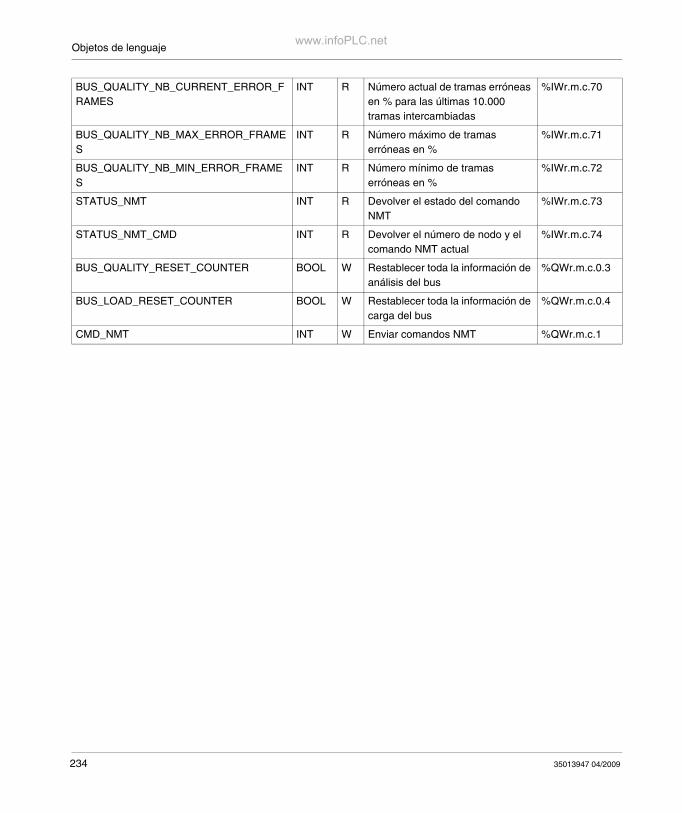
Objetos de lenguajewww.infoPLC.net
BUS_QUALITY_NB_CURRENT_ERROR_FRAMES
INT R Número actual de tramas erróneas en % para las últimas 10.000 tramas intercambiadas
%IWr.m.c.70
BUS_QUALITY_NB_MAX_ERROR_FRAMES
INT R Número máximo de tramas erróneas en %
%IWr.m.c.71
BUS_QUALITY_NB_MIN_ERROR_FRAMES
INT R Número mínimo de tramas erróneas en %
%IWr.m.c.72
STATUS_NMT INT R Devolver el estado del comando NMT
%IWr.m.c.73
STATUS_NMT_CMD INT R Devolver el número de nodo y el comando NMT actual
%IWr.m.c.74
BUS_QUALITY_RESET_COUNTER BOOL W Restablecer toda la información de análisis del bus
%QWr.m.c.0.3
BUS_LOAD_RESET_COUNTER BOOL W Restablecer toda la información de carga del bus
%QWr.m.c.0.4
CMD_NMT INT W Enviar comandos NMT %QWr.m.c.1
234 35013947 04/2009
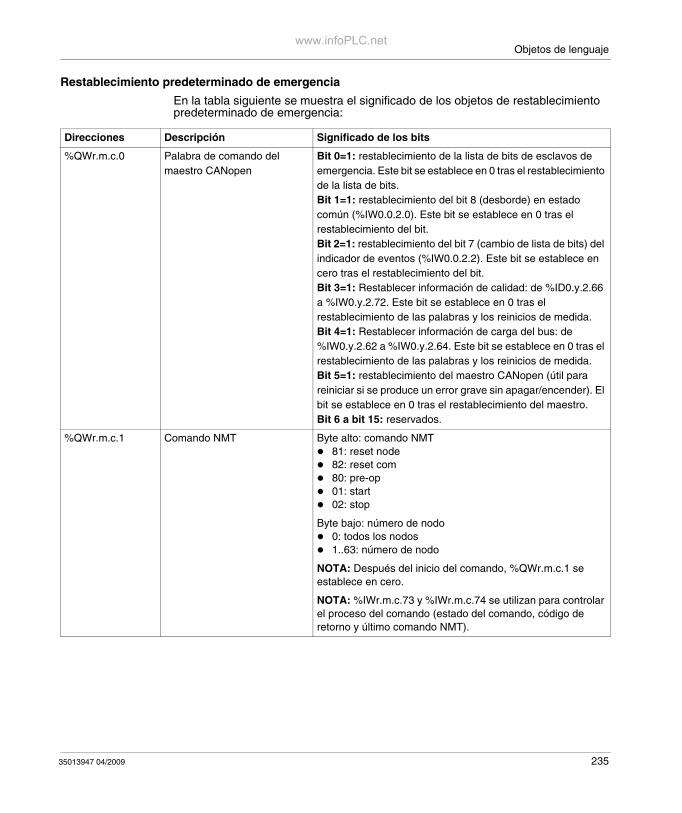
Objetos de lenguajewww.infoPLC.net
Restablecimiento predeterminado de emergencia
En la tabla siguiente se muestra el significado de los objetos de restablecimiento predeterminado de emergencia:
Direcciones Descripción Significado de los bits
%QWr.m.c.0 Palabra de comando del maestro CANopen
Bit 0=1: restablecimiento de la lista de bits de esclavos de emergencia. Este bit se establece en 0 tras el restablecimiento de la lista de bits.Bit 1=1: restablecimiento del bit 8 (desborde) en estado común (%IW0.0.2.0). Este bit se establece en 0 tras el restablecimiento del bit.Bit 2=1: restablecimiento del bit 7 (cambio de lista de bits) del indicador de eventos (%IW0.0.2.2). Este bit se establece en cero tras el restablecimiento del bit.Bit 3=1: Restablecer información de calidad: de %ID0.y.2.66 a %IW0.y.2.72. Este bit se establece en 0 tras el restablecimiento de las palabras y los reinicios de medida. Bit 4=1: Restablecer información de carga del bus: de %IW0.y.2.62 a %IW0.y.2.64. Este bit se establece en 0 tras el restablecimiento de las palabras y los reinicios de medida. Bit 5=1: restablecimiento del maestro CANopen (útil para reiniciar si se produce un error grave sin apagar/encender). El bit se establece en 0 tras el restablecimiento del maestro.Bit 6 a bit 15: reservados.
%QWr.m.c.1 Comando NMT Byte alto: comando NMT 81: reset node 82: reset com 80: pre-op 01: start 02: stop
Byte bajo: número de nodo 0: todos los nodos 1..63: número de nodo
NOTA: Después del inicio del comando, %QWr.m.c.1 se establece en cero.
NOTA: %IWr.m.c.73 y %IWr.m.c.74 se utilizan para controlar el proceso del comando (estado del comando, código de retorno y último comando NMT).
35013947 04/2009 235
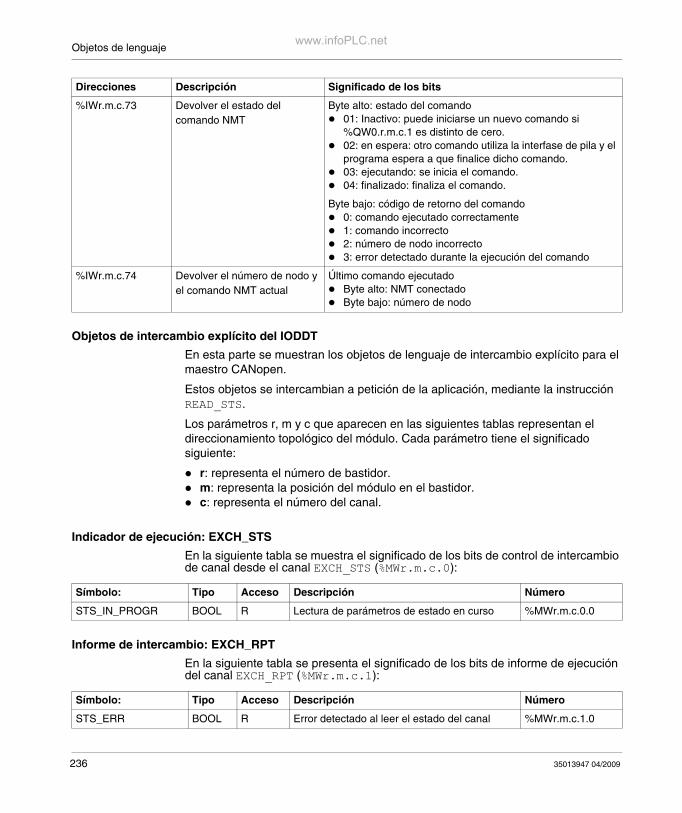
Objetos de lenguajewww.infoPLC.net
Objetos de intercambio explícito del IODDT
En esta parte se muestran los objetos de lenguaje de intercambio explícito para el maestro CANopen.
Estos objetos se intercambian a petición de la aplicación, mediante la instrucción READ_STS.
Los parámetros r, m y c que aparecen en las siguientes tablas representan el direccionamiento topológico del módulo. Cada parámetro tiene el significado siguiente:
r: representa el número de bastidor. m: representa la posición del módulo en el bastidor. c: representa el número del canal.
Indicador de ejecución: EXCH_STS
En la siguiente tabla se muestra el significado de los bits de control de intercambio de canal desde el canal EXCH_STS (%MWr.m.c.0):
Informe de intercambio: EXCH_RPT
En la siguiente tabla se presenta el significado de los bits de informe de ejecución del canal EXCH_RPT (%MWr.m.c.1):
%IWr.m.c.73 Devolver el estado del comando NMT
Byte alto: estado del comando 01: Inactivo: puede iniciarse un nuevo comando si
%QW0.r.m.c.1 es distinto de cero. 02: en espera: otro comando utiliza la interfase de pila y el
programa espera a que finalice dicho comando. 03: ejecutando: se inicia el comando. 04: finalizado: finaliza el comando.
Byte bajo: código de retorno del comando 0: comando ejecutado correctamente 1: comando incorrecto 2: número de nodo incorrecto 3: error detectado durante la ejecución del comando
%IWr.m.c.74 Devolver el número de nodo y el comando NMT actual
Último comando ejecutado Byte alto: NMT conectado Byte bajo: número de nodo
Direcciones Descripción Significado de los bits
Símbolo: Tipo Acceso Descripción Número
STS_IN_PROGR BOOL R Lectura de parámetros de estado en curso %MWr.m.c.0.0
Símbolo: Tipo Acceso Descripción Número
STS_ERR BOOL R Error detectado al leer el estado del canal %MWr.m.c.1.0
236 35013947 04/2009
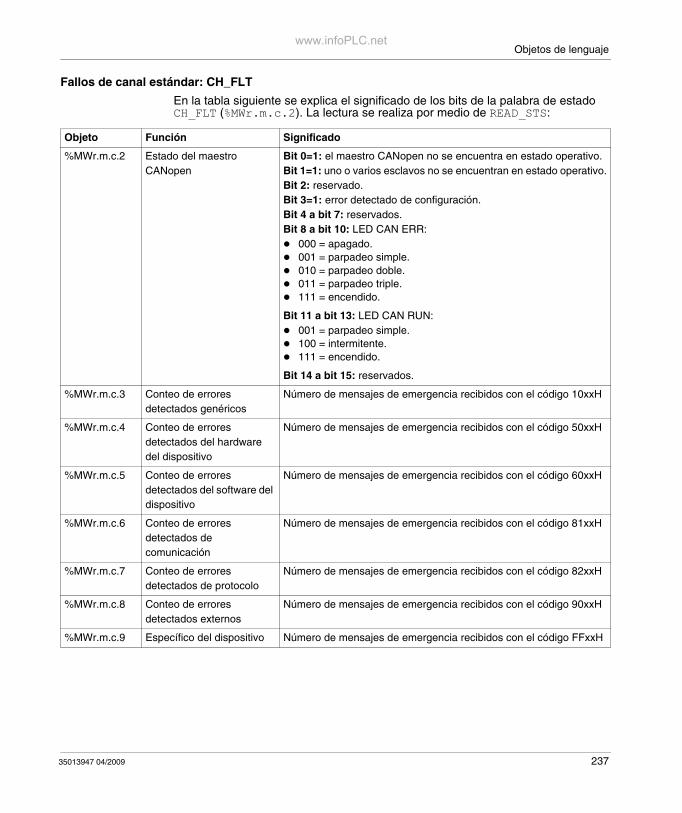
Objetos de lenguajewww.infoPLC.net
Fallos de canal estándar: CH_FLT
En la tabla siguiente se explica el significado de los bits de la palabra de estado CH_FLT (%MWr.m.c.2). La lectura se realiza por medio de READ_STS:
Objeto Función Significado
%MWr.m.c.2 Estado del maestro CANopen
Bit 0=1: el maestro CANopen no se encuentra en estado operativo.Bit 1=1: uno o varios esclavos no se encuentran en estado operativo.Bit 2: reservado.Bit 3=1: error detectado de configuración.Bit 4 a bit 7: reservados.Bit 8 a bit 10: LED CAN ERR: 000 = apagado. 001 = parpadeo simple. 010 = parpadeo doble. 011 = parpadeo triple. 111 = encendido.
Bit 11 a bit 13: LED CAN RUN: 001 = parpadeo simple. 100 = intermitente. 111 = encendido.
Bit 14 a bit 15: reservados.
%MWr.m.c.3 Conteo de errores detectados genéricos
Número de mensajes de emergencia recibidos con el código 10xxH
%MWr.m.c.4 Conteo de errores detectados del hardware del dispositivo
Número de mensajes de emergencia recibidos con el código 50xxH
%MWr.m.c.5 Conteo de errores detectados del software del dispositivo
Número de mensajes de emergencia recibidos con el código 60xxH
%MWr.m.c.6 Conteo de errores detectados de comunicación
Número de mensajes de emergencia recibidos con el código 81xxH
%MWr.m.c.7 Conteo de errores detectados de protocolo
Número de mensajes de emergencia recibidos con el código 82xxH
%MWr.m.c.8 Conteo de errores detectados externos
Número de mensajes de emergencia recibidos con el código 90xxH
%MWr.m.c.9 Específico del dispositivo Número de mensajes de emergencia recibidos con el código FFxxH
35013947 04/2009 237
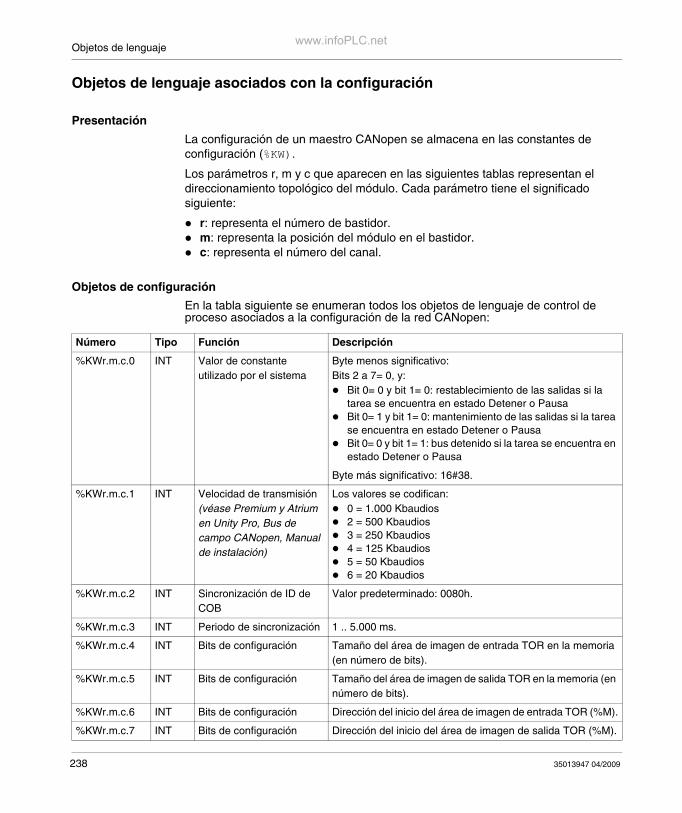
Objetos de lenguajewww.infoPLC.net
Objetos de lenguaje asociados con la configuración
Presentación
La configuración de un maestro CANopen se almacena en las constantes de configuración (%KW).
Los parámetros r, m y c que aparecen en las siguientes tablas representan el direccionamiento topológico del módulo. Cada parámetro tiene el significado siguiente:
r: representa el número de bastidor. m: representa la posición del módulo en el bastidor. c: representa el número del canal.
Objetos de configuración
En la tabla siguiente se enumeran todos los objetos de lenguaje de control de proceso asociados a la configuración de la red CANopen:
Número Tipo Función Descripción
%KWr.m.c.0 INT Valor de constante utilizado por el sistema
Byte menos significativo:Bits 2 a 7= 0, y: Bit 0= 0 y bit 1= 0: restablecimiento de las salidas si la
tarea se encuentra en estado Detener o Pausa Bit 0= 1 y bit 1= 0: mantenimiento de las salidas si la tarea
se encuentra en estado Detener o Pausa Bit 0= 0 y bit 1= 1: bus detenido si la tarea se encuentra en
estado Detener o Pausa
Byte más significativo: 16#38.
%KWr.m.c.1 INT Velocidad de transmisión (véase Premium y Atrium en Unity Pro, Bus de campo CANopen, Manual de instalación)
Los valores se codifican: 0 = 1.000 Kbaudios 2 = 500 Kbaudios 3 = 250 Kbaudios 4 = 125 Kbaudios 5 = 50 Kbaudios 6 = 20 Kbaudios
%KWr.m.c.2 INT Sincronización de ID de COB
Valor predeterminado: 0080h.
%KWr.m.c.3 INT Periodo de sincronización 1 .. 5.000 ms.
%KWr.m.c.4 INT Bits de configuración Tamaño del área de imagen de entrada TOR en la memoria (en número de bits).
%KWr.m.c.5 INT Bits de configuración Tamaño del área de imagen de salida TOR en la memoria (en número de bits).
%KWr.m.c.6 INT Bits de configuración Dirección del inicio del área de imagen de entrada TOR (%M).
%KWr.m.c.7 INT Bits de configuración Dirección del inicio del área de imagen de salida TOR (%M).
238 35013947 04/2009
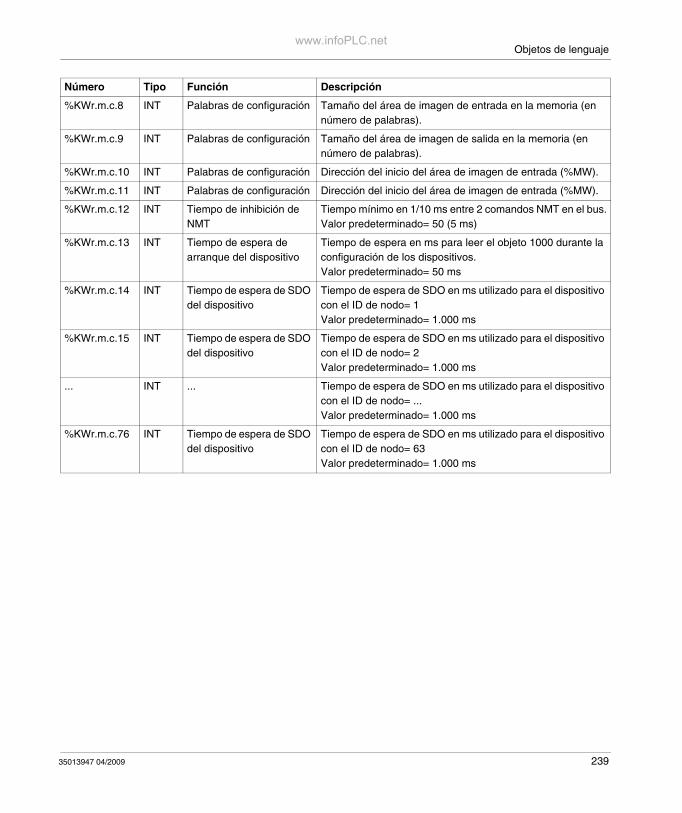
Objetos de lenguajewww.infoPLC.net
%KWr.m.c.8 INT Palabras de configuración Tamaño del área de imagen de entrada en la memoria (en número de palabras).
%KWr.m.c.9 INT Palabras de configuración Tamaño del área de imagen de salida en la memoria (en número de palabras).
%KWr.m.c.10 INT Palabras de configuración Dirección del inicio del área de imagen de entrada (%MW).
%KWr.m.c.11 INT Palabras de configuración Dirección del inicio del área de imagen de entrada (%MW).
%KWr.m.c.12 INT Tiempo de inhibición de NMT
Tiempo mínimo en 1/10 ms entre 2 comandos NMT en el bus.Valor predeterminado= 50 (5 ms)
%KWr.m.c.13 INT Tiempo de espera de arranque del dispositivo
Tiempo de espera en ms para leer el objeto 1000 durante la configuración de los dispositivos.Valor predeterminado= 50 ms
%KWr.m.c.14 INT Tiempo de espera de SDO del dispositivo
Tiempo de espera de SDO en ms utilizado para el dispositivo con el ID de nodo= 1Valor predeterminado= 1.000 ms
%KWr.m.c.15 INT Tiempo de espera de SDO del dispositivo
Tiempo de espera de SDO en ms utilizado para el dispositivo con el ID de nodo= 2Valor predeterminado= 1.000 ms
... INT ... Tiempo de espera de SDO en ms utilizado para el dispositivo con el ID de nodo= ...Valor predeterminado= 1.000 ms
%KWr.m.c.76 INT Tiempo de espera de SDO del dispositivo
Tiempo de espera de SDO en ms utilizado para el dispositivo con el ID de nodo= 63Valor predeterminado= 1.000 ms
Número Tipo Función Descripción
35013947 04/2009 239
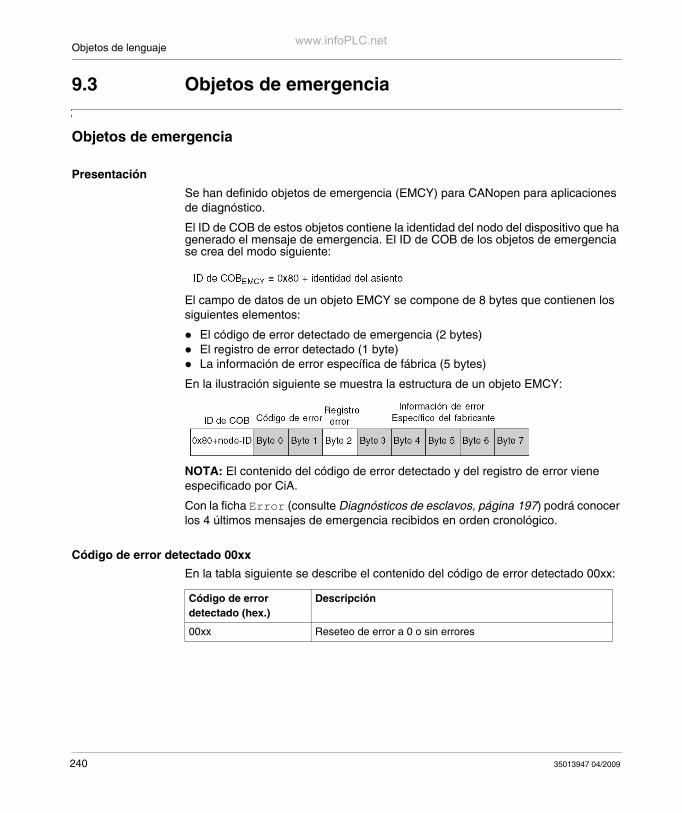
Objetos de lenguajewww.infoPLC.net
9.3 Objetos de emergencia
Objetos de emergencia
Presentación
Se han definido objetos de emergencia (EMCY) para CANopen para aplicaciones de diagnóstico.
El ID de COB de estos objetos contiene la identidad del nodo del dispositivo que ha generado el mensaje de emergencia. El ID de COB de los objetos de emergencia se crea del modo siguiente:
El campo de datos de un objeto EMCY se compone de 8 bytes que contienen los siguientes elementos:
El código de error detectado de emergencia (2 bytes) El registro de error detectado (1 byte) La información de error específica de fábrica (5 bytes)
En la ilustración siguiente se muestra la estructura de un objeto EMCY:
NOTA: El contenido del código de error detectado y del registro de error viene especificado por CiA.
Con la ficha Error (consulte Diagnósticos de esclavos, página 197) podrá conocer los 4 últimos mensajes de emergencia recibidos en orden cronológico.
Código de error detectado 00xx
En la tabla siguiente se describe el contenido del código de error detectado 00xx:
Código de error detectado (hex.)
Descripción
00xx Reseteo de error a 0 o sin errores
240 35013947 04/2009
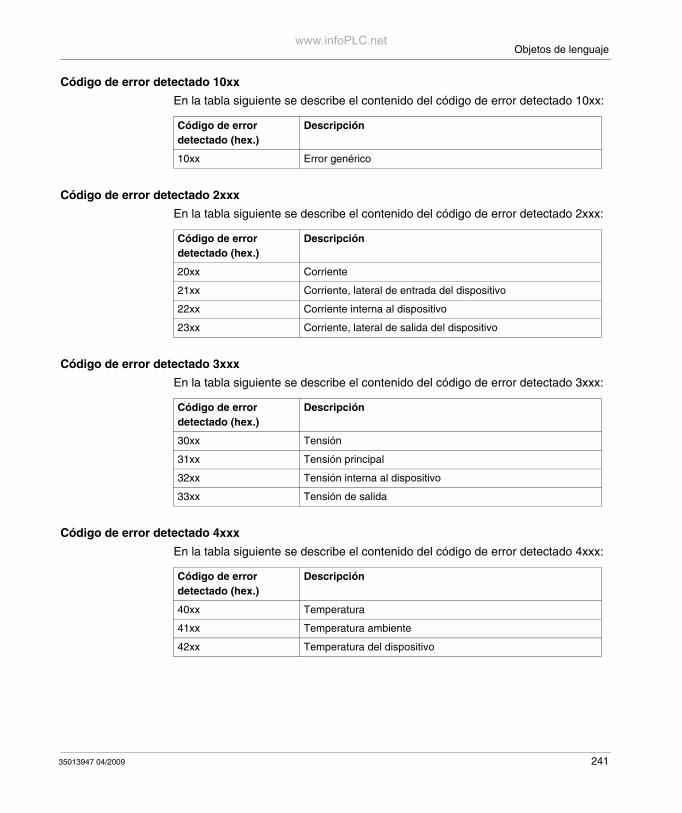
Objetos de lenguajewww.infoPLC.net
Código de error detectado 10xx
En la tabla siguiente se describe el contenido del código de error detectado 10xx:
Código de error detectado 2xxx
En la tabla siguiente se describe el contenido del código de error detectado 2xxx:
Código de error detectado 3xxx
En la tabla siguiente se describe el contenido del código de error detectado 3xxx:
Código de error detectado 4xxx
En la tabla siguiente se describe el contenido del código de error detectado 4xxx:
Código de error detectado (hex.)
Descripción
10xx Error genérico
Código de error detectado (hex.)
Descripción
20xx Corriente
21xx Corriente, lateral de entrada del dispositivo
22xx Corriente interna al dispositivo
23xx Corriente, lateral de salida del dispositivo
Código de error detectado (hex.)
Descripción
30xx Tensión
31xx Tensión principal
32xx Tensión interna al dispositivo
33xx Tensión de salida
Código de error detectado (hex.)
Descripción
40xx Temperatura
41xx Temperatura ambiente
42xx Temperatura del dispositivo
35013947 04/2009 241
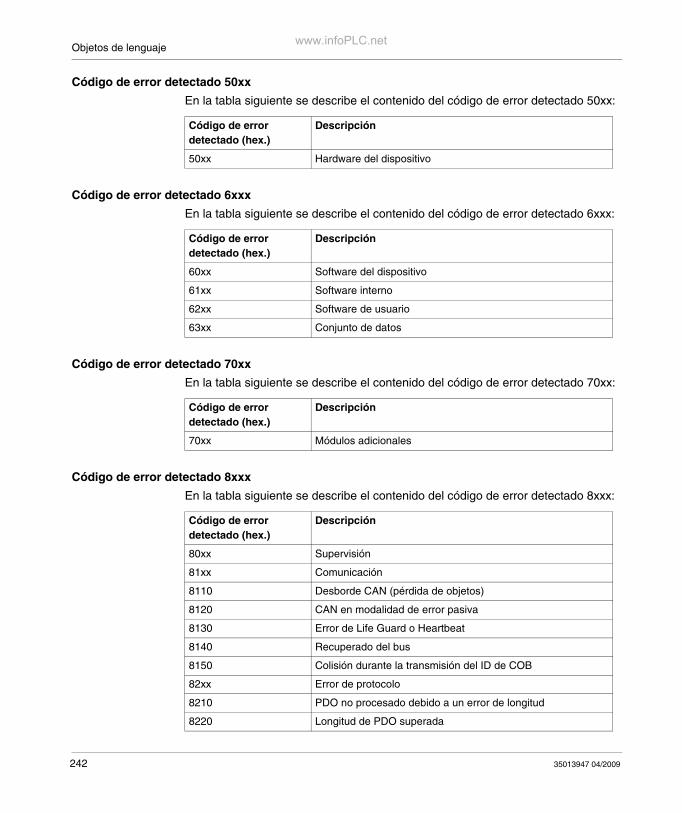
Objetos de lenguajewww.infoPLC.net
Código de error detectado 50xx
En la tabla siguiente se describe el contenido del código de error detectado 50xx:
Código de error detectado 6xxx
En la tabla siguiente se describe el contenido del código de error detectado 6xxx:
Código de error detectado 70xx
En la tabla siguiente se describe el contenido del código de error detectado 70xx:
Código de error detectado 8xxx
En la tabla siguiente se describe el contenido del código de error detectado 8xxx:
Código de error detectado (hex.)
Descripción
50xx Hardware del dispositivo
Código de error detectado (hex.)
Descripción
60xx Software del dispositivo
61xx Software interno
62xx Software de usuario
63xx Conjunto de datos
Código de error detectado (hex.)
Descripción
70xx Módulos adicionales
Código de error detectado (hex.)
Descripción
80xx Supervisión
81xx Comunicación
8110 Desborde CAN (pérdida de objetos)
8120 CAN en modalidad de error pasiva
8130 Error de Life Guard o Heartbeat
8140 Recuperado del bus
8150 Colisión durante la transmisión del ID de COB
82xx Error de protocolo
8210 PDO no procesado debido a un error de longitud
8220 Longitud de PDO superada
242 35013947 04/2009
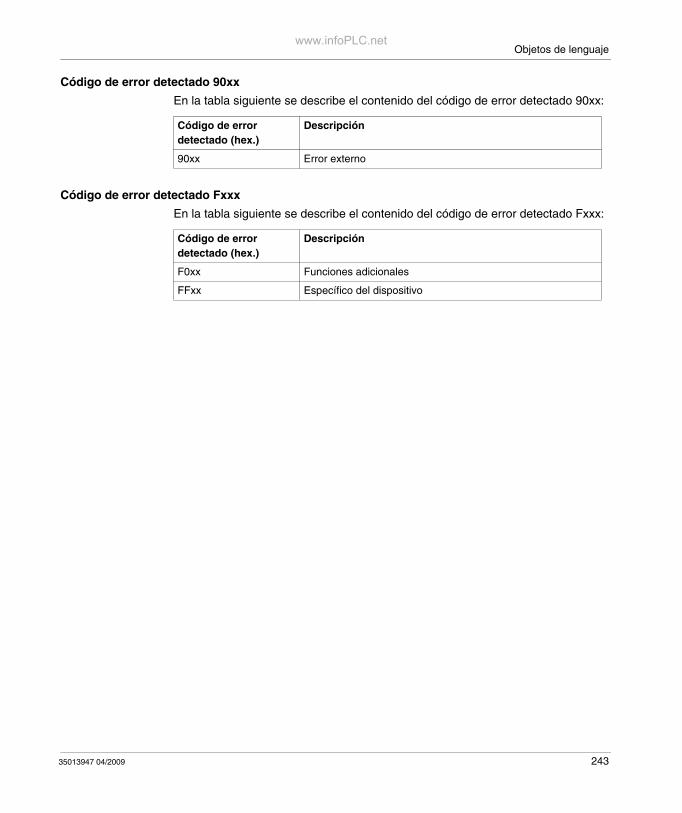
Objetos de lenguajewww.infoPLC.net
Código de error detectado 90xx
En la tabla siguiente se describe el contenido del código de error detectado 90xx:
Código de error detectado Fxxx
En la tabla siguiente se describe el contenido del código de error detectado Fxxx:
Código de error detectado (hex.)
Descripción
90xx Error externo
Código de error detectado (hex.)
Descripción
F0xx Funciones adicionales
FFxx Específico del dispositivo
35013947 04/2009 243

Objetos de lenguajewww.infoPLC.net
244 35013947 04/2009
35013947 04/2009
III
Ejemplo de implementación CANopen
35013947 04/2009
www.infoPLC.net
Inicio rápido: ejemplo de implementación CANopen
Descripción general
En esta sección se presenta un ejemplo de implementación CANopen.
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
10 Descripción de la aplicación 247
11 Instalación de la aplicación mediante Unity Pro 249
12 Inicio de la aplicación 287
245

Ejemplo de implementación CANopen
246 35013947 04/2009
www.infoPLC.net
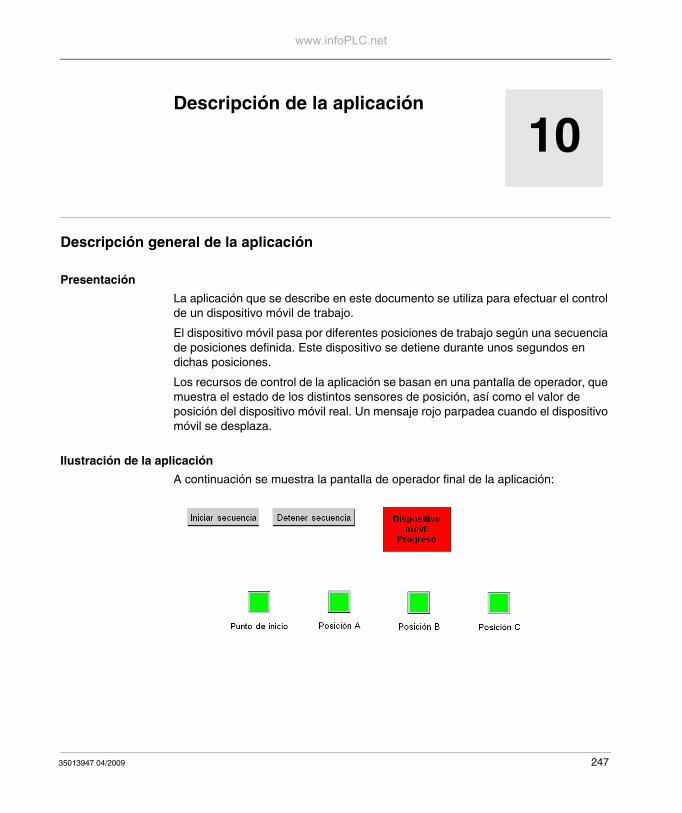
35013947 04/2009
10
Descripción de la aplicación
35013947 04/2009
www.infoPLC.net
Descripción de la aplicación
Descripción general de la aplicación
Presentación
La aplicación que se describe en este documento se utiliza para efectuar el control de un dispositivo móvil de trabajo.
El dispositivo móvil pasa por diferentes posiciones de trabajo según una secuencia de posiciones definida. Este dispositivo se detiene durante unos segundos en dichas posiciones.
Los recursos de control de la aplicación se basan en una pantalla de operador, que muestra el estado de los distintos sensores de posición, así como el valor de posición del dispositivo móvil real. Un mensaje rojo parpadea cuando el dispositivo móvil se desplaza.
Ilustración de la aplicación
A continuación se muestra la pantalla de operador final de la aplicación:
247
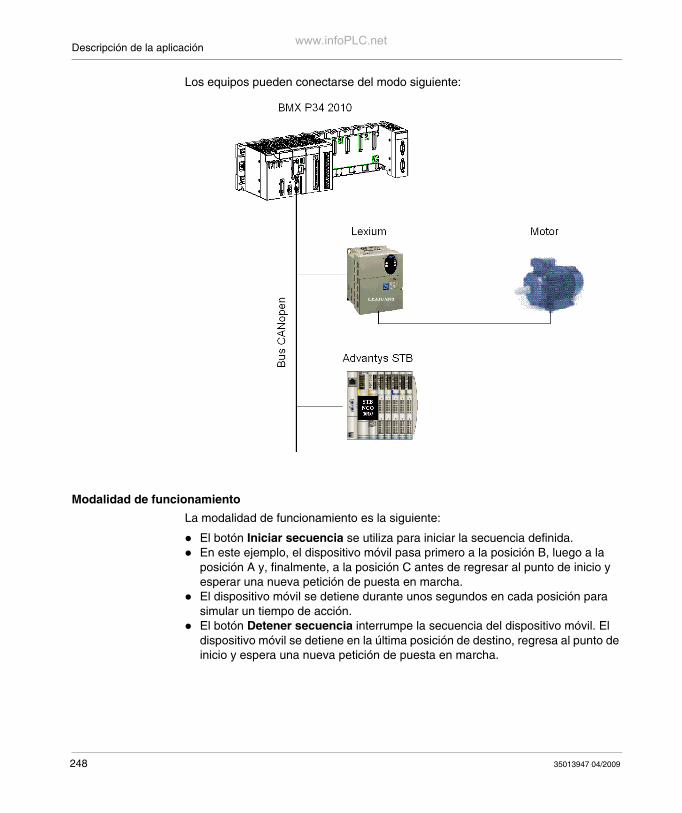
Descripción de la aplicaciónwww.infoPLC.net
Los equipos pueden conectarse del modo siguiente:
Modalidad de funcionamiento
La modalidad de funcionamiento es la siguiente:
El botón Iniciar secuencia se utiliza para iniciar la secuencia definida. En este ejemplo, el dispositivo móvil pasa primero a la posición B, luego a la
posición A y, finalmente, a la posición C antes de regresar al punto de inicio y esperar una nueva petición de puesta en marcha.
El dispositivo móvil se detiene durante unos segundos en cada posición para simular un tiempo de acción.
El botón Detener secuencia interrumpe la secuencia del dispositivo móvil. El dispositivo móvil se detiene en la última posición de destino, regresa al punto de inicio y espera una nueva petición de puesta en marcha.
248 35013947 04/2009
35013947 04/2009
11
Aplicación mediante Unity Pro
35013947 04/2009
www.infoPLC.net
Instalación de la aplicación mediante Unity Pro
Objeto
En este capítulo se describe el procedimiento para crear la aplicación que se describe. En general y de forma más detallada, se indican los pasos en los que se divide la creación de los distintos componentes de la aplicación.
Contenido de este capítulo
Este capítulo contiene las siguientes secciones:
Sección Apartado Página
11.1 Presentación de la solución utilizada 250
11.2 Desarrollo de la aplicación 253
249
Aplicación mediante Unity Prowww.infoPLC.net
11.1 Presentación de la solución utilizada
Objeto
En esta sección se presenta la solución que se emplea para desarrollar la aplicación. Además, se indican las selecciones tecnológicas y el plazo de creación de la aplicación.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Selecciones tecnológicas utilizadas 251
Los distintos pasos del proceso utilizando Unity Pro 252
250 35013947 04/2009
Aplicación mediante Unity Prowww.infoPLC.net
Selecciones tecnológicas utilizadas
Presentación
Existen varios métodos de escritura de una aplicación de control de dispositivo móvil mediante Unity Pro. El método que se propone utiliza una servounidad Lexium 05 y una Advantys STB configuradas en una red CANopen.
Selecciones tecnológicas
En la tabla siguiente se indican las selecciones tecnológicas utilizadas para la aplicación:
NOTA: Este ejemplo muestra el intercambio de PDO y SDO hacia una unidad de velocidad. Sin embargo, para la configuración y el control de la unidad de velocidad, se recomienda utilizar un bloque de funciones de movimiento.
Objetos Selecciones utilizadas
Modalidad de servicio Lexium
Uso de la modalidad de posicionamiento. Esta modalidad permite enviar una posición de destino a las servounidades Lexium 05 a través de la red CANopen.
Interfase de sensor Uso de un STB Advantys. Este dispositivo es un conjunto de E/S distribuidas, alimentación y otros módulos que funcionan simultáneamente como asiento de isla en una red de bus de campo abierto.
Pantalla de supervisión Uso de elementos de la librería y objetos nuevos.
Programa de supervisión principal
Este programa se desarrolla utilizando una gráfica de función secuencial (SFC), también denominada GRAFCET. Las distintas secciones y transiciones se crean en lenguaje de diagrama de contactos (LD) y en lenguaje de texto estructurado (ST).
35013947 04/2009 251
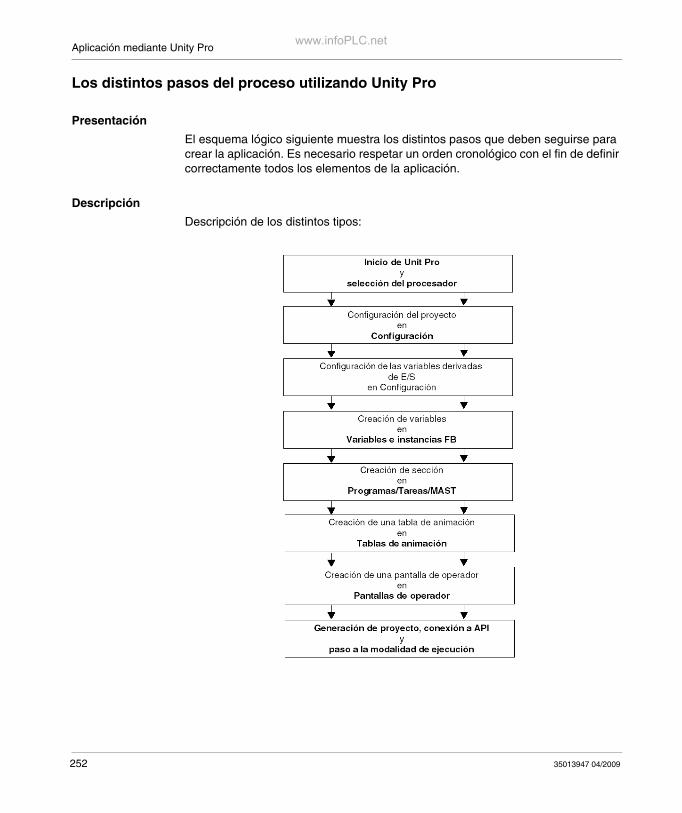
Aplicación mediante Unity Prowww.infoPLC.net
Los distintos pasos del proceso utilizando Unity Pro
Presentación
El esquema lógico siguiente muestra los distintos pasos que deben seguirse para crear la aplicación. Es necesario respetar un orden cronológico con el fin de definir correctamente todos los elementos de la aplicación.
Descripción
Descripción de los distintos tipos:
252 35013947 04/2009
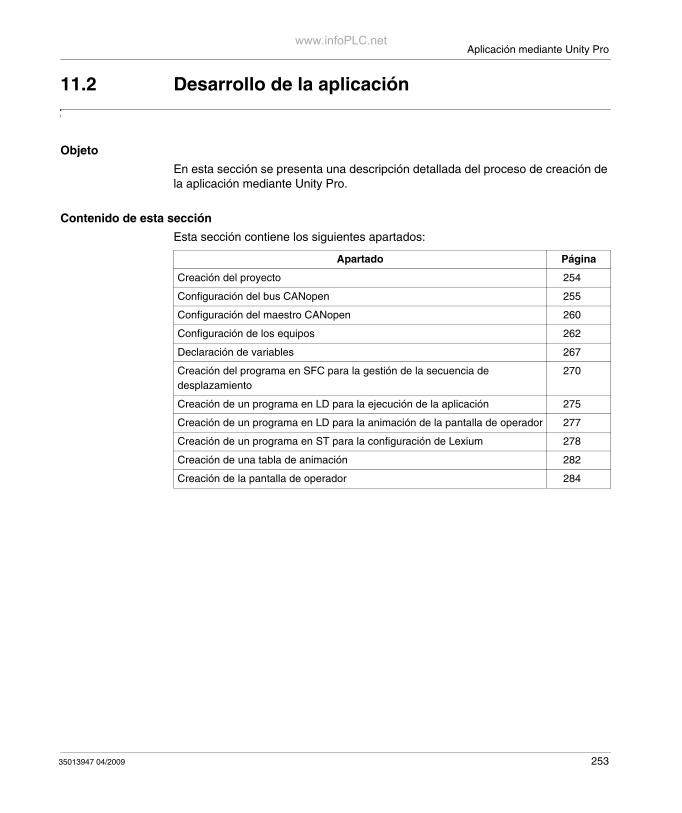
Aplicación mediante Unity Prowww.infoPLC.net
11.2 Desarrollo de la aplicación
Objeto
En esta sección se presenta una descripción detallada del proceso de creación de la aplicación mediante Unity Pro.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Creación del proyecto 254
Configuración del bus CANopen 255
Configuración del maestro CANopen 260
Configuración de los equipos 262
Declaración de variables 267
Creación del programa en SFC para la gestión de la secuencia de desplazamiento
270
Creación de un programa en LD para la ejecución de la aplicación 275
Creación de un programa en LD para la animación de la pantalla de operador 277
Creación de un programa en ST para la configuración de Lexium 278
Creación de una tabla de animación 282
Creación de la pantalla de operador 284
35013947 04/2009 253
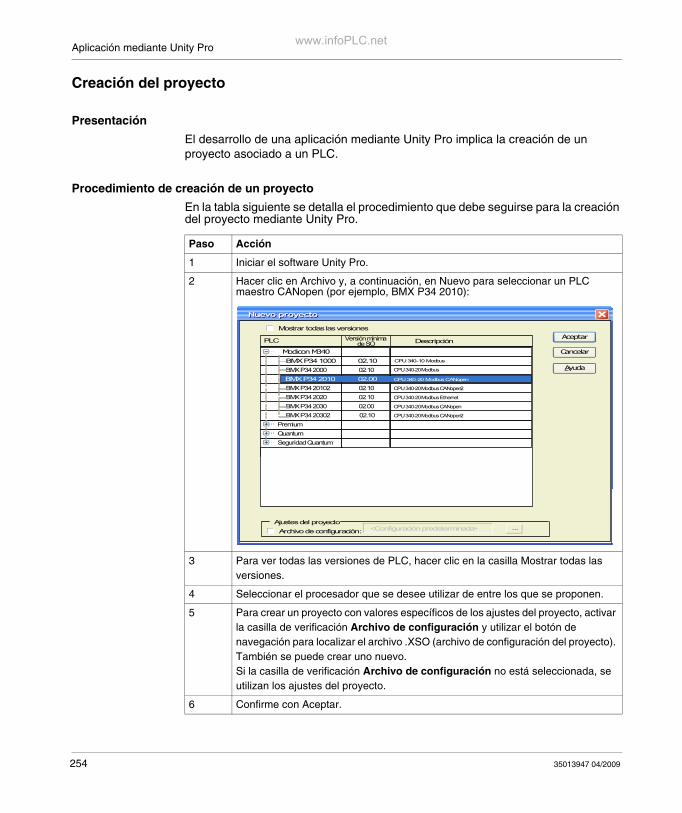
Aplicación mediante Unity Prowww.infoPLC.net
Creación del proyecto
Presentación
El desarrollo de una aplicación mediante Unity Pro implica la creación de un proyecto asociado a un PLC.
Procedimiento de creación de un proyecto
En la tabla siguiente se detalla el procedimiento que debe seguirse para la creación del proyecto mediante Unity Pro.
Paso Acción
1 Iniciar el software Unity Pro.
2 Hacer clic en Archivo y, a continuación, en Nuevo para seleccionar un PLC maestro CANopen (por ejemplo, BMX P34 2010):
3 Para ver todas las versiones de PLC, hacer clic en la casilla Mostrar todas las versiones.
4 Seleccionar el procesador que se desee utilizar de entre los que se proponen.
5 Para crear un proyecto con valores específicos de los ajustes del proyecto, activar la casilla de verificación Archivo de configuración y utilizar el botón de navegación para localizar el archivo .XSO (archivo de configuración del proyecto). También se puede crear uno nuevo.Si la casilla de verificación Archivo de configuración no está seleccionada, se utilizan los ajustes del proyecto.
6 Confirme con Aceptar.
Nuevo proyectoNuevo proyecto
Mostrar todas las versiones
Ajustes del proyecto
Aceptar
Cancelar
Ayuda
PLC
Archivo de configuración:
Versión mínima de SO Descripción
<Configuración predeterminada> ...
Seguridad Quantum
Quantum
Premium
BMX P34 20302
BMX P34 2030
BMX P34 2020
BMX P34 20102
BMX P34 2000
Modicon M340
02.10
02.00
02.10
02.10
02.10
CPU 340-20 Modbus CANopen2
CPU 340-20 Modbus CANopen
CPU 340-20 Modbus Ethernet
CPU 340-20 Modbus CANopen2
CPU 340-20 Modbus
02.10 CPU 340-10 ModbusBMX P34 1000
02.00 CPU 340-20 Modbus CANopenBMX P34 2010
254 35013947 04/2009
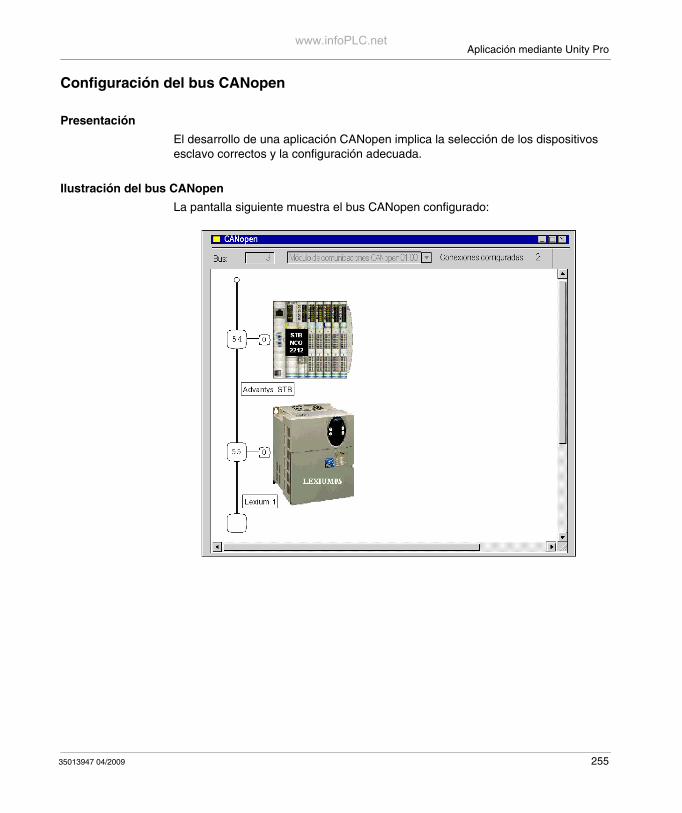
Aplicación mediante Unity Prowww.infoPLC.net
Configuración del bus CANopen
Presentación
El desarrollo de una aplicación CANopen implica la selección de los dispositivos esclavo correctos y la configuración adecuada.
Ilustración del bus CANopen
La pantalla siguiente muestra el bus CANopen configurado:
35013947 04/2009 255
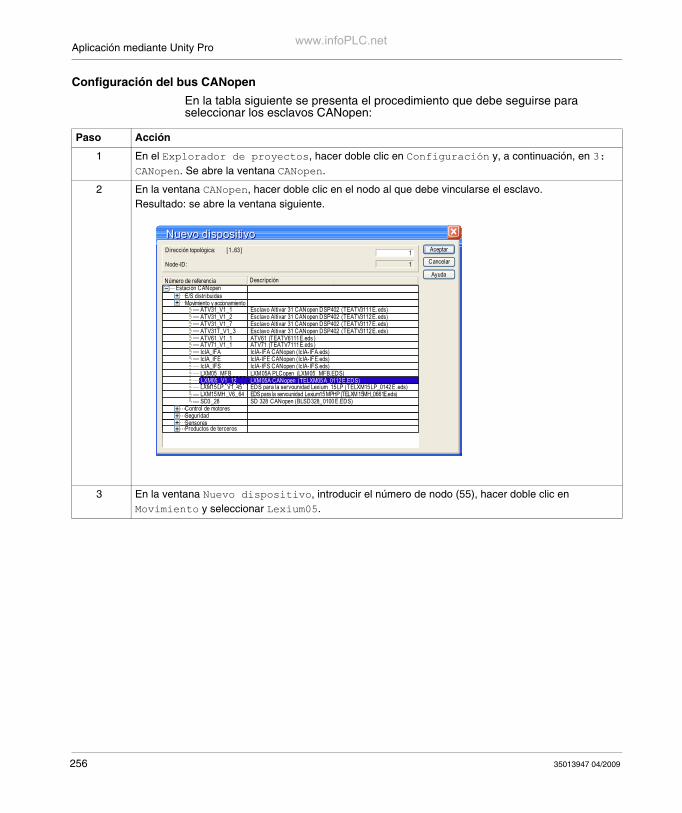
Aplicación mediante Unity Prowww.infoPLC.net
Configuración del bus CANopen
En la tabla siguiente se presenta el procedimiento que debe seguirse para seleccionar los esclavos CANopen:
Paso Acción
1 En el Explorador de proyectos, hacer doble clic en Configuración y, a continuación, en 3: CANopen. Se abre la ventana CANopen.
2 En la ventana CANopen, hacer doble clic en el nodo al que debe vincularse el esclavo.Resultado: se abre la ventana siguiente.
3 En la ventana Nuevo dispositivo, introducir el número de nodo (55), hacer doble clic en Movimiento y seleccionar Lexium05.
Nuevo dispositivoNuevo dispositivoDirección topológica: [1..63 ]
Node-ID:
1
1
SD3_28LXM15MH_V6_64LXM15LP_V1_45
LXM05_MFBIcIA_IFSIcIA_IFEIcIA_IFAATV71_V1_1ATV61_V1_1ATV31T_V1_3ATV31_V1_7ATV31_V1_2ATV31_V1_1
SD 328 CANopen (BLSD328_0100E.EDS)EDS para la servounidad Lexium 15 MPHP (TELXM15MH_0661E.eds)EDS para la servounidad Lexium 15LP (TELXM15LP_0142E .eds)LXM05A CANopen (TELXM05A_0112E.EDS)LXM05A PLCopen (LXM05_MFB.EDS)IcIA-IFS CANopen (IcIA-IFS.eds)IcIA-IFE CANopen (IcIA-IFE.eds)IcIA-IFA CANopen (IcIA-IFA.eds)ATV71 (TEATV7111E.eds )ATV61 (TEATV6111E.eds )Esclavo Altivar 31 CANopen DSP402 (TEATV3112E.eds)Esclavo Altivar 31 CANopen DSP402 (TEATV3117E.eds)Esclavo Altivar 31 CANopen DSP402 (TEATV3112E.eds)Esclavo Altivar 31 CANopen DSP402 (TEATV3111E.eds)
DescripciónNúmero de referencia
Aceptar
Cancelar
Ayuda
Estación CANopenE/S distribuidasMovimiento y accionamiento
Control de motoresSeguridadSensoresProductos de terceros
LXM05_V1_12
256 35013947 04/2009
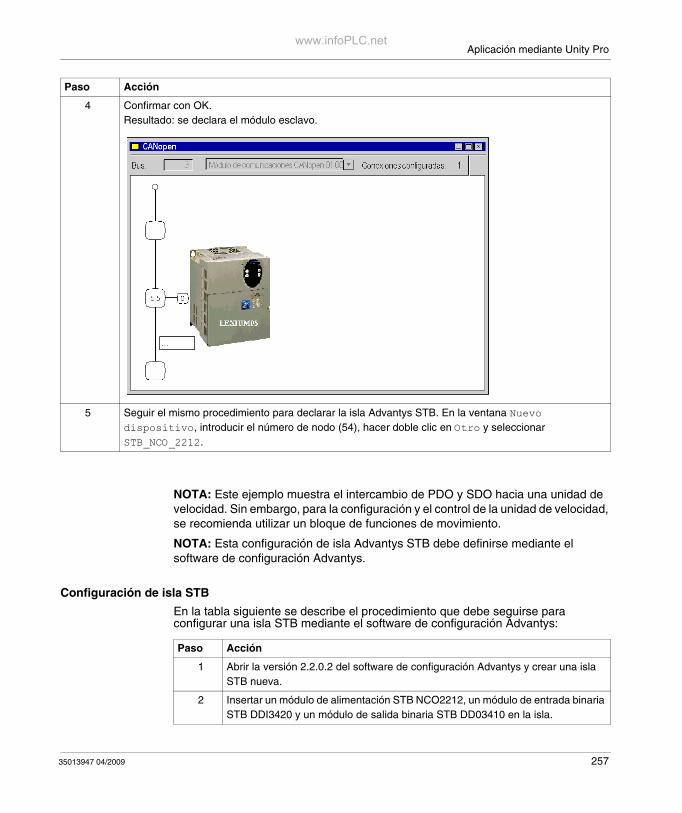
Aplicación mediante Unity Prowww.infoPLC.net
NOTA: Este ejemplo muestra el intercambio de PDO y SDO hacia una unidad de velocidad. Sin embargo, para la configuración y el control de la unidad de velocidad, se recomienda utilizar un bloque de funciones de movimiento.
NOTA: Esta configuración de isla Advantys STB debe definirse mediante el software de configuración Advantys.
Configuración de isla STB
En la tabla siguiente se describe el procedimiento que debe seguirse para configurar una isla STB mediante el software de configuración Advantys:
4 Confirmar con OK.Resultado: se declara el módulo esclavo.
5 Seguir el mismo procedimiento para declarar la isla Advantys STB. En la ventana Nuevo dispositivo, introducir el número de nodo (54), hacer doble clic en Otro y seleccionar STB_NCO_2212.
Paso Acción
Paso Acción
1 Abrir la versión 2.2.0.2 del software de configuración Advantys y crear una isla STB nueva.
2 Insertar un módulo de alimentación STB NCO2212, un módulo de entrada binaria STB DDI3420 y un módulo de salida binaria STB DD03410 en la isla.
35013947 04/2009 257
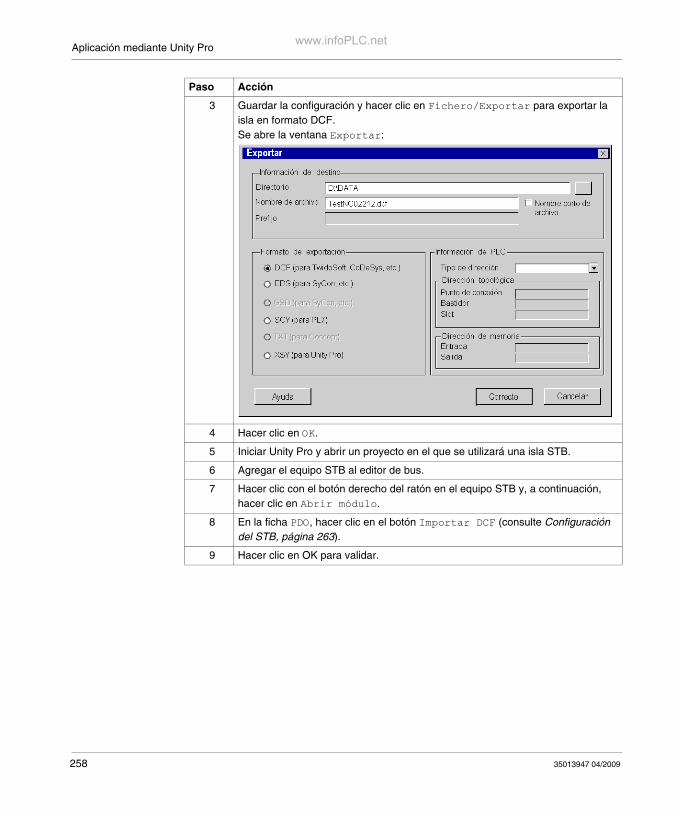
Aplicación mediante Unity Prowww.infoPLC.net
3 Guardar la configuración y hacer clic en Fichero/Exportar para exportar la isla en formato DCF.Se abre la ventana Exportar:
4 Hacer clic en OK.
5 Iniciar Unity Pro y abrir un proyecto en el que se utilizará una isla STB.
6 Agregar el equipo STB al editor de bus.
7 Hacer clic con el botón derecho del ratón en el equipo STB y, a continuación, hacer clic en Abrir módulo.
8 En la ficha PDO, hacer clic en el botón Importar DCF (consulte Configuración del STB, página 263).
9 Hacer clic en OK para validar.
Paso Acción
258 35013947 04/2009
Aplicación mediante Unity Prowww.infoPLC.net
ADVERTENCIAFUNCIONAMIENTO INESPERADO DEL EQUIPO
El archivo de símbolos *.xsy generado por Advantys no se debe utilizar en Unity Pro durante la configuración de una isla STB.
Los dispositivos CANopen no se admiten durante la importación del archivo *.xsy de Advantys a Unity Pro.
Los objetos %MW que se asignan en la tabla de PDO no están en el mismo rango que los definidos en la configuración del módulo CANopen.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
35013947 04/2009 259
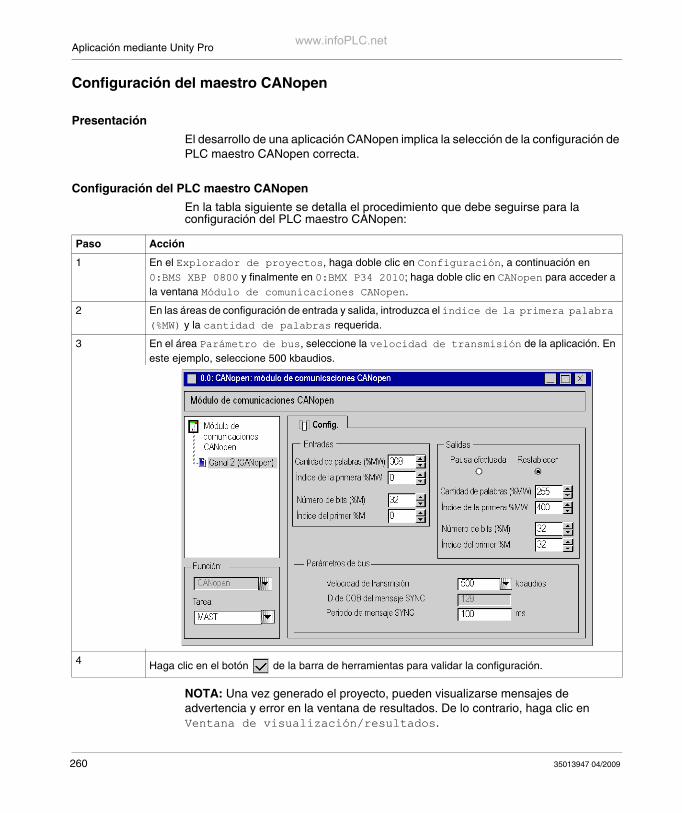
Aplicación mediante Unity Prowww.infoPLC.net
Configuración del maestro CANopen
Presentación
El desarrollo de una aplicación CANopen implica la selección de la configuración de PLC maestro CANopen correcta.
Configuración del PLC maestro CANopen
En la tabla siguiente se detalla el procedimiento que debe seguirse para la configuración del PLC maestro CANopen:
NOTA: Una vez generado el proyecto, pueden visualizarse mensajes de advertencia y error en la ventana de resultados. De lo contrario, haga clic en Ventana de visualización/resultados.
Paso Acción
1 En el Explorador de proyectos, haga doble clic en Configuración, a continuación en 0:BMS XBP 0800 y finalmente en 0:BMX P34 2010; haga doble clic en CANopen para acceder a la ventana Módulo de comunicaciones CANopen.
2 En las áreas de configuración de entrada y salida, introduzca el índice de la primera palabra (%MW) y la cantidad de palabras requerida.
3 En el área Parámetro de bus, seleccione la velocidad de transmisión de la aplicación. En este ejemplo, seleccione 500 kbaudios.
4 Haga clic en el botón de la barra de herramientas para validar la configuración.
260 35013947 04/2009
Aplicación mediante Unity Prowww.infoPLC.net
Los mensajes de advertencia indican que existen más palabras configuradas de las necesarias en el bus.
Por su parte, los mensajes de error indican que faltan palabras configuradas.
35013947 04/2009 261
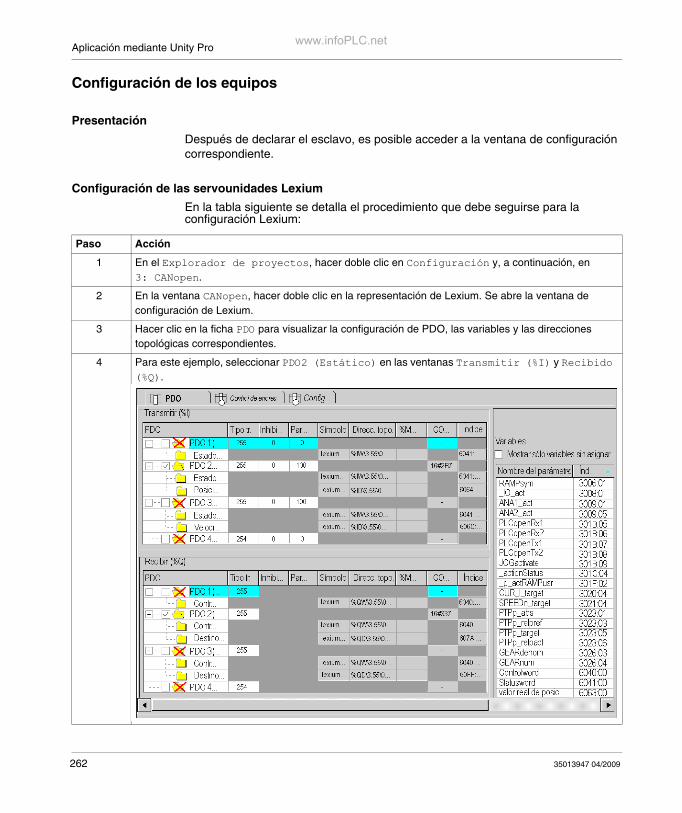
Aplicación mediante Unity Prowww.infoPLC.net
Configuración de los equipos
Presentación
Después de declarar el esclavo, es posible acceder a la ventana de configuración correspondiente.
Configuración de las servounidades Lexium
En la tabla siguiente se detalla el procedimiento que debe seguirse para la configuración Lexium:
Paso Acción
1 En el Explorador de proyectos, hacer doble clic en Configuración y, a continuación, en 3: CANopen.
2 En la ventana CANopen, hacer doble clic en la representación de Lexium. Se abre la ventana de configuración de Lexium.
3 Hacer clic en la ficha PDO para visualizar la configuración de PDO, las variables y las direcciones topológicas correspondientes.
4 Para este ejemplo, seleccionar PDO2 (Estático) en las ventanas Transmitir (%I) y Recibido (%Q).
262 35013947 04/2009
Aplicación mediante Unity Prowww.infoPLC.net
Configuración del STB
En la tabla siguiente se describe el procedimiento que debe seguirse para cargar la configuración definida mediante el software de configuración Advantys:
5 Hacer clic en la ficha Control de errores y establecer el Tiempo del productor de heartbeat de nodo en 300 ms.
6 Hacer clic en el botón de la barra de tareas para validar la configuración.
7 Cerrar la ventana.
Paso Acción
Paso Acción
1 En el Explorador de proyectos, hacer doble clic en Configuración y, a continuación, en 3: CANopen.
2 En la ventana CANopen, hacer doble clic en la representación Advantys STB. Se abre la ventana de configuración STB NCO2212.
3 En el área Función, seleccionar Autoconf.
En este ejemplo, se utiliza la función Autoconf., porque los módulos autoconfigurables se insertan en la isla STB (consulte Configuración Advantys STB, página 291).
4 Hacer clic en la ficha PDO para visualizar la configuración de PDO, las variables y las direcciones topológicas correspondientes. Hacer clic en el botón derecho de la barra de desplazamiento horizontal para acceder al botón Importar DCF.
35013947 04/2009 263
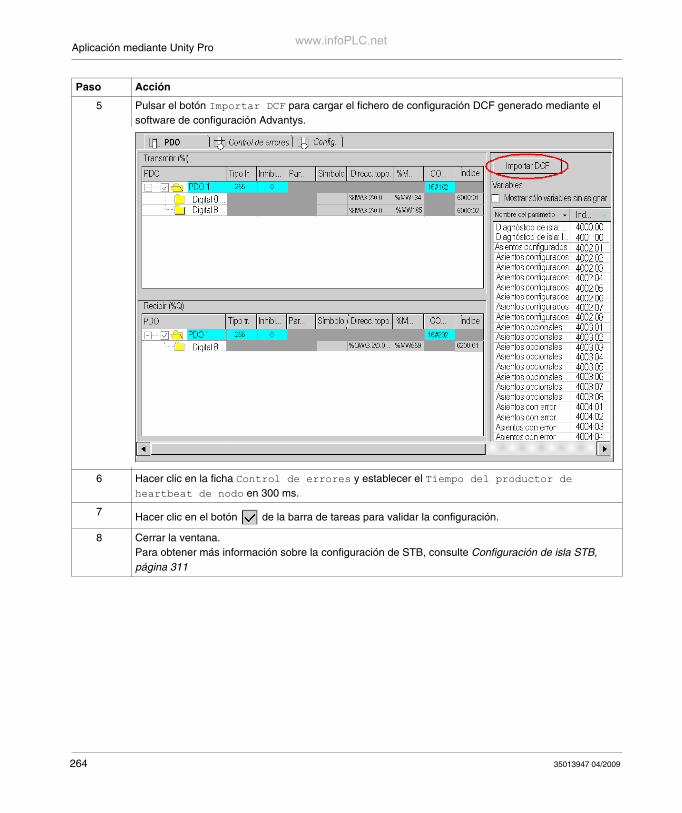
Aplicación mediante Unity Prowww.infoPLC.net
5 Pulsar el botón Importar DCF para cargar el fichero de configuración DCF generado mediante el software de configuración Advantys.
6 Hacer clic en la ficha Control de errores y establecer el Tiempo del productor de heartbeat de nodo en 300 ms.
7 Hacer clic en el botón de la barra de tareas para validar la configuración.
8 Cerrar la ventana.Para obtener más información sobre la configuración de STB, consulte Configuración de isla STB, página 311
Paso Acción
264 35013947 04/2009
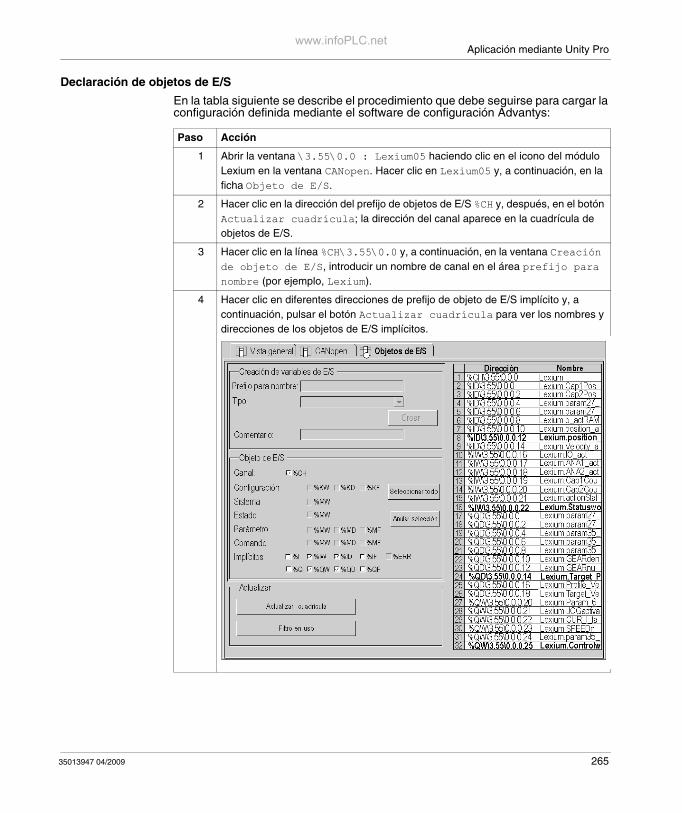
Aplicación mediante Unity Prowww.infoPLC.net
Declaración de objetos de E/S
En la tabla siguiente se describe el procedimiento que debe seguirse para cargar la configuración definida mediante el software de configuración Advantys:
Paso Acción
1 Abrir la ventana \3.55\0.0 : Lexium05 haciendo clic en el icono del módulo Lexium en la ventana CANopen. Hacer clic en Lexium05 y, a continuación, en la ficha Objeto de E/S.
2 Hacer clic en la dirección del prefijo de objetos de E/S %CH y, después, en el botón Actualizar cuadrícula; la dirección del canal aparece en la cuadrícula de objetos de E/S.
3 Hacer clic en la línea %CH\3.55\0.0 y, a continuación, en la ventana Creación de objeto de E/S, introducir un nombre de canal en el área prefijo para nombre (por ejemplo, Lexium).
4 Hacer clic en diferentes direcciones de prefijo de objeto de E/S implícito y, a continuación, pulsar el botón Actualizar cuadrícula para ver los nombres y direcciones de los objetos de E/S implícitos.
35013947 04/2009 265

Aplicación mediante Unity Prowww.infoPLC.net
NOTA: Repita el mismo procedimiento para crear un objeto de E/S CANopen llamado BusMaster (%CH0.0.2). En la ventana Bus PLC, haga doble clic en el puerto CANopen y, a continuación, haga clic en Módulo de comunicaciones CANopen para acceder a la ficha Objetos de E/S.
266 35013947 04/2009
Aplicación mediante Unity Prowww.infoPLC.net
Declaración de variables
Presentación
Es necesario declarar todas las variables utilizadas en las diferentes secciones del programa.
No será posible emplear variables sin declarar en el programa.
NOTA: Para obtener más información, consulte la ayuda en línea de Unity Pro (haga clic en ?, Unity, Unity Pro, Modalidades de servicio y Editor de datos).
Procedimiento de declaración de variables
En la tabla siguiente se presenta el procedimiento que debe seguirse para declarar variables de aplicación:
Variables utilizadas para la aplicación
La tabla siguiente contiene los detalles de las variables utilizadas en la aplicación:
Paso Acción
1 En Explorador de proyectos/Variables e instancias FB, haga doble clic en Variables elementales.
2 En la ventana Editor de datos, seleccione el cuadro de la columna Nombre e introduzca un nombre para la primera variable.
3 Seleccione un Tipo para esta variable.
4 Una vez que haya declarado todas las variables, puede cerrar la ventana.
Variable Tipo Definición
Action_Time TIME Tiempo de detención del dispositivo móvil en cada posición.
Configuration_Done BOOL Se ha completado la configuración de Lexium.
Homing_Done BOOL Se ha establecido la definición del punto de origen.
index_subindex DINT Direcciones de parámetro CANopen para el bloque WRITE_VAR.
Lexium_Config_Step INT Pasos de configuración (programa)
Lexium_Disabling INT Comando de desconexión
Lexium_operation_enable
INT Comando para iniciar la unidad Lexium.
Mobile_at_Position_A BOOL Dispositivo móvil en la posición A.
Mobile_at_Position_B BOOL Dispositivo móvil en la posición B.
Mobile_at_Position_C BOOL Dispositivo móvil en la posición C.
35013947 04/2009 267
Aplicación mediante Unity Prowww.infoPLC.net
Mobile_at_start_position BOOL Dispositivo móvil en la posición de inicio.
Mobile_in_Progress BOOL El dispositivo móvil se está desplazando.
New_SetPoint BOOL Inicio del siguiente desplazamiento.
Operation_done BOOL Se ha completado el funcionamiento del dispositivo móvil.
Position_A DINT Primer valor de posicionamiento.
Position_B DINT Segundo valor de posicionamiento.
Position_C DINT Tercer valor de posicionamiento.
Ready_For_Stop BOOL El dispositivo móvil se desplaza hasta la última posición de destino indicada antes de detener la aplicación. A continuación, vuelve a la posición de inicio.
Run BOOL Inicio de la secuencia.
Sequence_Number INT Número de desplazamientos efectuados por el dispositivo móvil.
Start_Configuration EBOOL Inicio de la configuración de Lexium.
Stop BOOL El dispositivo móvil detiene la secuencia y regresa al punto de inicio.
Target_Reached BOOL Se ha alcanzado la posición de destino.
Variable Tipo Definición
268 35013947 04/2009
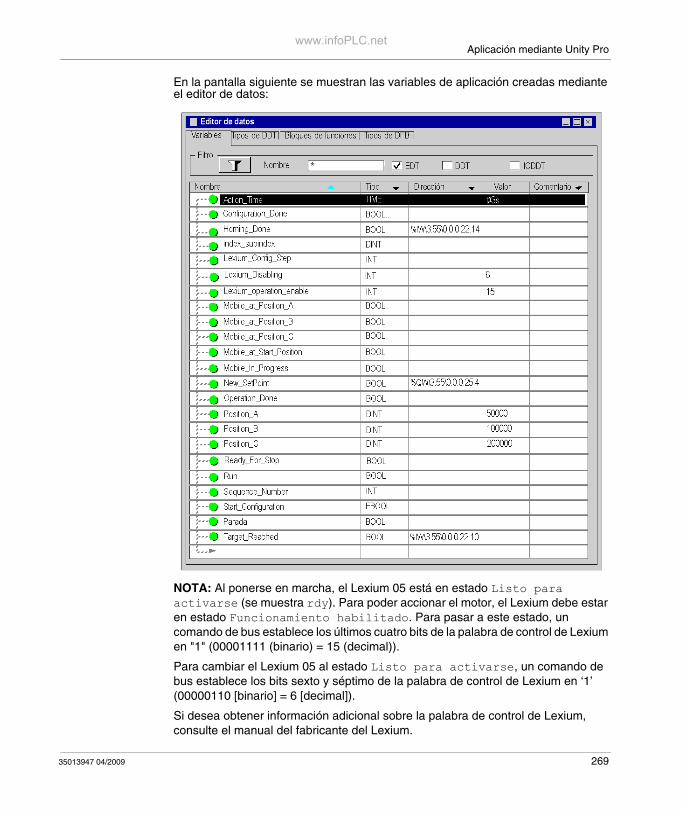
Aplicación mediante Unity Prowww.infoPLC.net
En la pantalla siguiente se muestran las variables de aplicación creadas mediante el editor de datos:
NOTA: Al ponerse en marcha, el Lexium 05 está en estado Listo para activarse (se muestra rdy). Para poder accionar el motor, el Lexium debe estar en estado Funcionamiento habilitado. Para pasar a este estado, un comando de bus establece los últimos cuatro bits de la palabra de control de Lexium en "1" (00001111 (binario) = 15 (decimal)).
Para cambiar el Lexium 05 al estado Listo para activarse, un comando de bus establece los bits sexto y séptimo de la palabra de control de Lexium en ‘1’ (00000110 [binario] = 6 [decimal]).
Si desea obtener información adicional sobre la palabra de control de Lexium, consulte el manual del fabricante del Lexium.
35013947 04/2009 269
Aplicación mediante Unity Prowww.infoPLC.net
Creación del programa en SFC para la gestión de la secuencia de desplazamiento
Presentación
El programa principal está escrito en SFC (Grafcet). Las diferentes secciones de los pasos y transiciones Grafcet están escritas en LD. Este programa se declara en una tarea MAST y dependerá del estado de una variable booleana.
La principal ventaja del lenguaje SFC es que su animación gráfica permite controlar la ejecución de una aplicación en tiempo real.
En la tarea MAST se declaran varias secciones:
La sección Move_Sequence (consulte Ilustración de la sección Move_Sequence, página 273), escrita en SFC, describe la modalidad de servicio.
La sección Application (consulte Creación de un programa en LD para la ejecución de la aplicación, página 275), escrita en LD, ejecuta el tiempo de retardo de acción del dispositivo móvil y restablece el bit de inicio de posiciona-miento New_Setpoint.
La sección Operator_Screen_Animation (consulte Creación de un programa en LD para la animación de la pantalla de operador, página 277), escrita en LD que se utiliza para animar la pantalla del operador.
La sección Lexium_Config (consulte Creación de un programa en ST para la configuración de Lexium, página 278), escrita en ST y que describe los distintos pasos de la configuración de Lexium.
270 35013947 04/2009
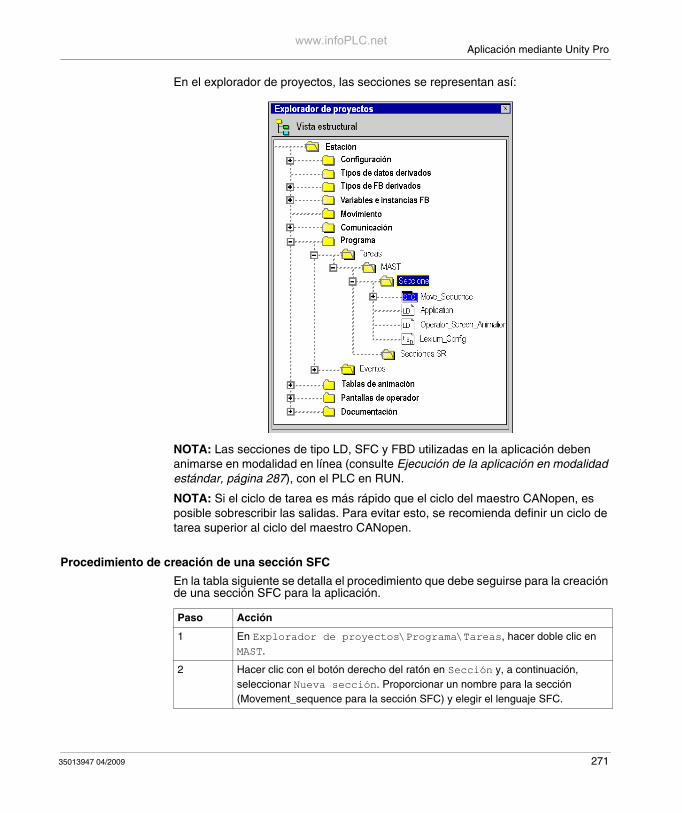
Aplicación mediante Unity Prowww.infoPLC.net
En el explorador de proyectos, las secciones se representan así:
NOTA: Las secciones de tipo LD, SFC y FBD utilizadas en la aplicación deben animarse en modalidad en línea (consulte Ejecución de la aplicación en modalidad estándar, página 287), con el PLC en RUN.
NOTA: Si el ciclo de tarea es más rápido que el ciclo del maestro CANopen, es posible sobrescribir las salidas. Para evitar esto, se recomienda definir un ciclo de tarea superior al ciclo del maestro CANopen.
Procedimiento de creación de una sección SFC
En la tabla siguiente se detalla el procedimiento que debe seguirse para la creación de una sección SFC para la aplicación.
Paso Acción
1 En Explorador de proyectos\Programa\Tareas, hacer doble clic en MAST.
2 Hacer clic con el botón derecho del ratón en Sección y, a continuación, seleccionar Nueva sección. Proporcionar un nombre para la sección (Movement_sequence para la sección SFC) y elegir el lenguaje SFC.
35013947 04/2009 271

Aplicación mediante Unity Prowww.infoPLC.net
3 Aparece el nombre de la sección, que puede editarse haciendo doble clic en él.
4 Las herramientas de edición de SFC aparecen en la ventana, que pueden utilizarse para crear el Grafcet.Por ejemplo, para crear un paso con una transición:
Para crear el paso, hacer clic en y colocarlo en el editor.
Para crear la transición, hacer clic en y colocarla en el editor (generalmente debajo del paso anterior).
Paso Acción
272 35013947 04/2009
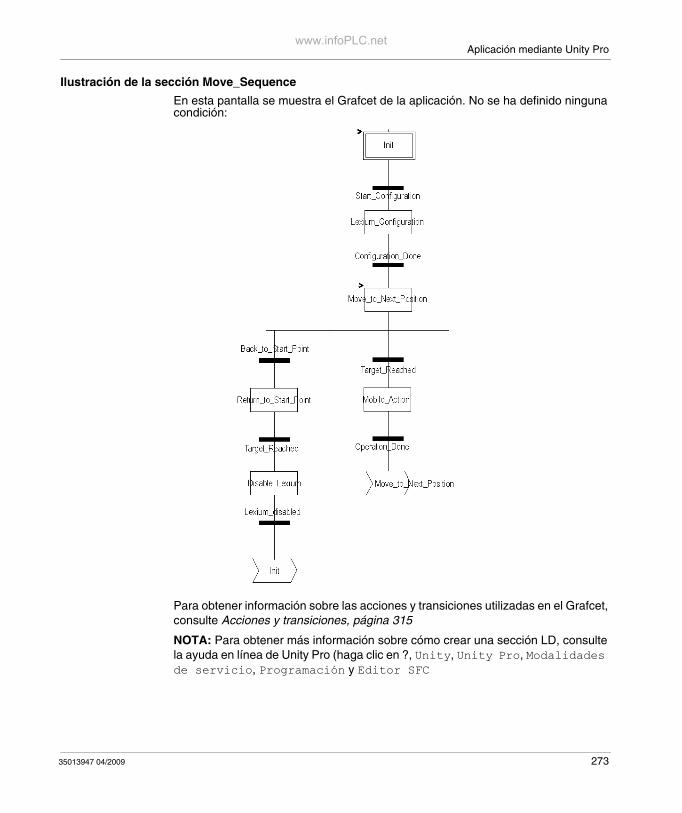
Aplicación mediante Unity Prowww.infoPLC.net
Ilustración de la sección Move_Sequence
En esta pantalla se muestra el Grafcet de la aplicación. No se ha definido ninguna condición:
Para obtener información sobre las acciones y transiciones utilizadas en el Grafcet, consulte Acciones y transiciones, página 315
NOTA: Para obtener más información sobre cómo crear una sección LD, consulte la ayuda en línea de Unity Pro (haga clic en ?, Unity, Unity Pro, Modalidades de servicio, Programación y Editor SFC
35013947 04/2009 273
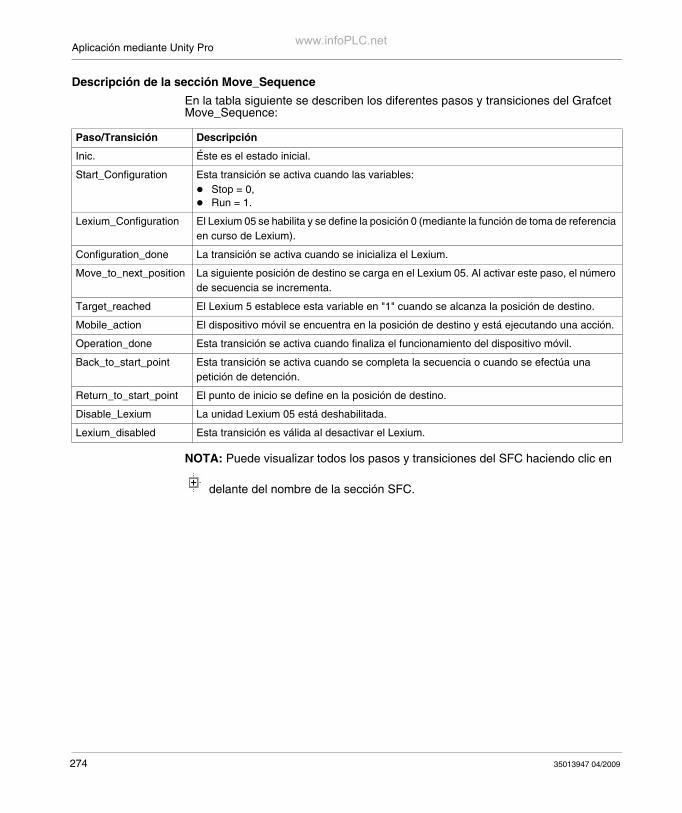
Aplicación mediante Unity Prowww.infoPLC.net
Descripción de la sección Move_Sequence
En la tabla siguiente se describen los diferentes pasos y transiciones del Grafcet Move_Sequence:
NOTA: Puede visualizar todos los pasos y transiciones del SFC haciendo clic en
delante del nombre de la sección SFC.
Paso/Transición Descripción
Inic. Éste es el estado inicial.
Start_Configuration Esta transición se activa cuando las variables: Stop = 0, Run = 1.
Lexium_Configuration El Lexium 05 se habilita y se define la posición 0 (mediante la función de toma de referencia en curso de Lexium).
Configuration_done La transición se activa cuando se inicializa el Lexium.
Move_to_next_position La siguiente posición de destino se carga en el Lexium 05. Al activar este paso, el número de secuencia se incrementa.
Target_reached El Lexium 5 establece esta variable en "1" cuando se alcanza la posición de destino.
Mobile_action El dispositivo móvil se encuentra en la posición de destino y está ejecutando una acción.
Operation_done Esta transición se activa cuando finaliza el funcionamiento del dispositivo móvil.
Back_to_start_point Esta transición se activa cuando se completa la secuencia o cuando se efectúa una petición de detención.
Return_to_start_point El punto de inicio se define en la posición de destino.
Disable_Lexium La unidad Lexium 05 está deshabilitada.
Lexium_disabled Esta transición es válida al desactivar el Lexium.
274 35013947 04/2009
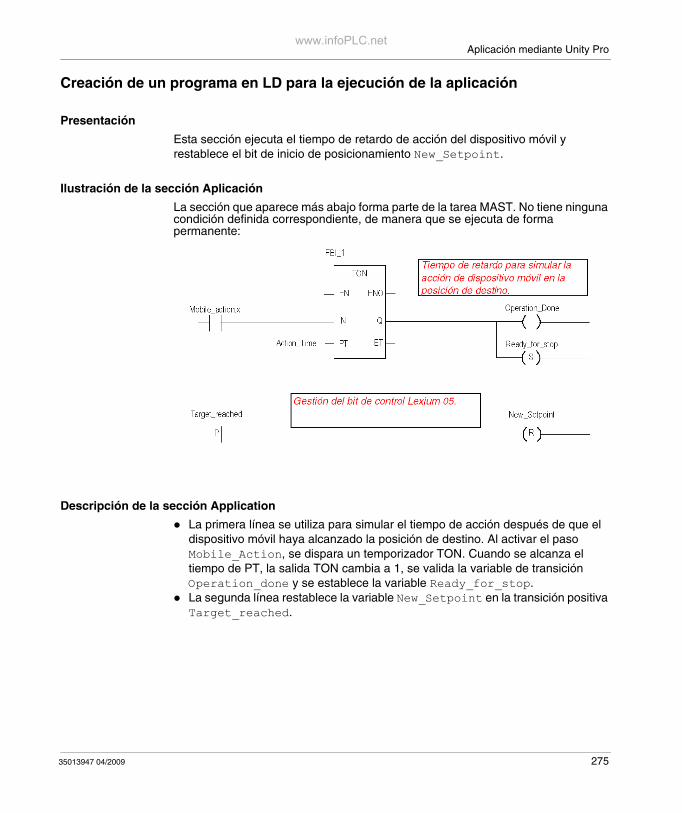
Aplicación mediante Unity Prowww.infoPLC.net
Creación de un programa en LD para la ejecución de la aplicación
Presentación
Esta sección ejecuta el tiempo de retardo de acción del dispositivo móvil y restablece el bit de inicio de posicionamiento New_Setpoint.
Ilustración de la sección Aplicación
La sección que aparece más abajo forma parte de la tarea MAST. No tiene ninguna condición definida correspondiente, de manera que se ejecuta de forma permanente:
Descripción de la sección Application
La primera línea se utiliza para simular el tiempo de acción después de que el dispositivo móvil haya alcanzado la posición de destino. Al activar el paso Mobile_Action, se dispara un temporizador TON. Cuando se alcanza el tiempo de PT, la salida TON cambia a 1, se valida la variable de transición Operation_done y se establece la variable Ready_for_stop.
La segunda línea restablece la variable New_Setpoint en la transición positiva Target_reached.
35013947 04/2009 275
Aplicación mediante Unity Prowww.infoPLC.net
Procedimiento de creación de una sección LD
En la tabla siguiente se describe el procedimiento que debe seguirse para crear parte de la sección Application.
NOTA: Para obtener más información sobre cómo crear una sección LD, consulte la ayuda en línea de Unity Pro (haga clic en ?, Unity, Unity Pro, Modalidades de servicio, Programación y Editor LD).
Paso Acción
1 En Explorador de proyectos\Programa\Tareas, hacer doble clic en MAST.
2 Hacer clic con el botón derecho del ratón en Sección y, a continuación, seleccionar Nueva sección. Dar un nombre a la sección Application y seleccionar el LD de tipo de lenguaje.Se abre la ventana de edición.
3Para crear el contacto Action_Mobile.x, hacer clic en y colocarlo en el
editor.Hacer doble clic en este contacto e introducir el nombre del paso con el sufijo «.x» al final (que indica un paso de una sección SFC). Confirmar mediante Aceptar.
4 Para utilizar el bloque TON, es necesario instanciarlo. Hacer clic con el botón
derecho del ratón en Selección de datos y en . Hacer clic en la ficha Tipos de función y de bloques de funciones. Hacer clic en Conjunto de librerías y seleccionar el bloque TON de la lista. A continuación, confirmar mediante Aceptar y colocar el bloque. Para vincular el contacto Action_Mobile.x con la entrada del bloque de funciones TON, alinear el contacto y la entrada de forma horizontal, hacer clic
en y colocar el vínculo entre el contacto y la entrada.
276 35013947 04/2009
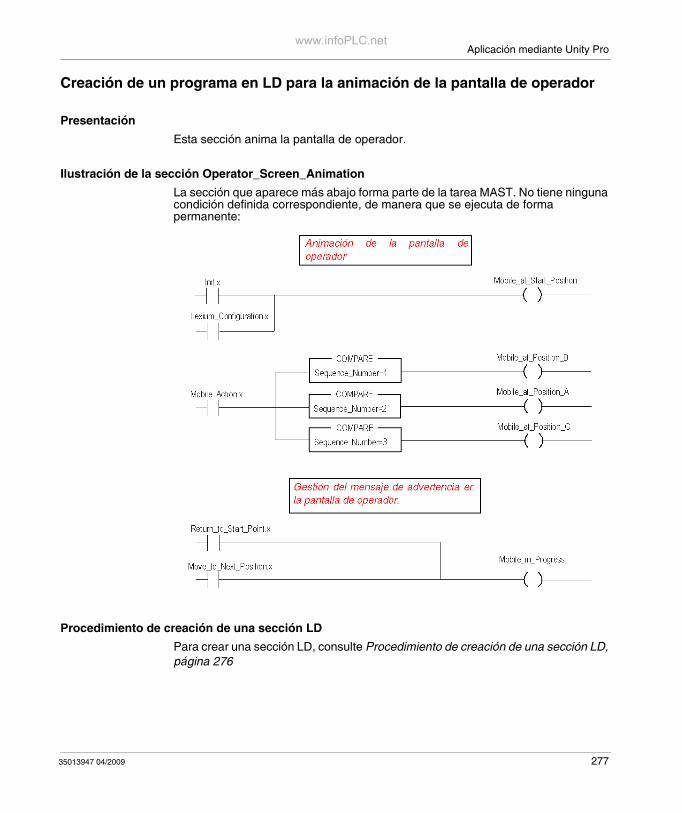
Aplicación mediante Unity Prowww.infoPLC.net
Creación de un programa en LD para la animación de la pantalla de operador
Presentación
Esta sección anima la pantalla de operador.
Ilustración de la sección Operator_Screen_Animation
La sección que aparece más abajo forma parte de la tarea MAST. No tiene ninguna condición definida correspondiente, de manera que se ejecuta de forma permanente:
Procedimiento de creación de una sección LD
Para crear una sección LD, consulte Procedimiento de creación de una sección LD, página 276
35013947 04/2009 277
Aplicación mediante Unity Prowww.infoPLC.net
Creación de un programa en ST para la configuración de Lexium
Presentación
Esta sección ejecuta los distintos pasos de la configuración de Lexium. Dicha sección sólo se activa al llegar al paso Lexium_Configuration del grafcet (consulte Ilustración de la sección Move_Sequence, página 273).
Estructura de programación
La estructura de programación es la siguiente:
NOTA: Para obtener una declaración de variable correcta, haga clic en Herramientas/Ajustes del proyecto/Extensiones de lenguaje y, a continuación, marque Variables de matriz representadas directamente y Permitir matrices dinámicas.
Número de paso
Descripción del paso
0 Comando de inicio de Lexium.
10 Si Lexium se encuentra en el estado Ejecutar, cambia en la modalidad de toma de referencia en curso mediante una función WRITE_VAR.
20 Si el resultado de WRITE_VAR es concluyente, ir al paso 30.
30 Definición del método de toma de referencia en curso mediante una función WRITE_VAR. Para obtener más información sobre el método de movimiento de referencia, consulte el manual de usuario de Lexium).
40 Si el resultado de WRITE_VAR es concluyente, vaya al paso 50.
50 Inicio del método de toma de referencia en curso.
60 Se realiza la toma de referencia en curso.
70 Lexium cambia a la modalidad de posicionamiento mediante una función WRITE_VAR.
80 Si el resultado de WRITE_VAR es concluyente, se realiza la configuración de Lexium.
278 35013947 04/2009
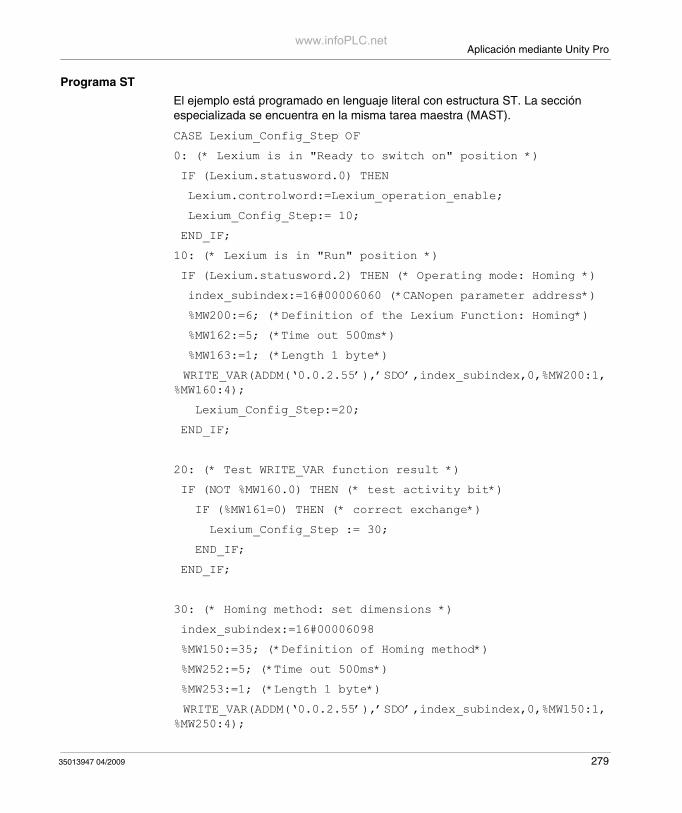
Aplicación mediante Unity Prowww.infoPLC.net
Programa ST
El ejemplo está programado en lenguaje literal con estructura ST. La sección especializada se encuentra en la misma tarea maestra (MAST).
CASE Lexium_Config_Step OF
0: (* Lexium is in "Ready to switch on" position *)
IF (Lexium.statusword.0) THEN
Lexium.controlword:=Lexium_operation_enable;
Lexium_Config_Step:= 10;
END_IF;
10: (* Lexium is in "Run" position *)
IF (Lexium.statusword.2) THEN (* Operating mode: Homing *)
index_subindex:=16#00006060 (*CANopen parameter address*)
%MW200:=6; (*Definition of the Lexium Function: Homing*)
%MW162:=5; (*Time out 500ms*)
%MW163:=1; (*Length 1 byte*)
WRITE_VAR(ADDM(‘0.0.2.55’),’SDO’,index_subindex,0,%MW200:1, %MW160:4);
Lexium_Config_Step:=20;
END_IF;
20: (* Test WRITE_VAR function result *)
IF (NOT %MW160.0) THEN (* test activity bit*)
IF (%MW161=0) THEN (* correct exchange*)
Lexium_Config_Step := 30;
END_IF;
END_IF;
30: (* Homing method: set dimensions *)
index_subindex:=16#00006098
%MW150:=35; (*Definition of Homing method*)
%MW252:=5; (*Time out 500ms*)
%MW253:=1; (*Length 1 byte*)
WRITE_VAR(ADDM(‘0.0.2.55’),’SDO’,index_subindex,0,%MW150:1, %MW250:4);
35013947 04/2009 279
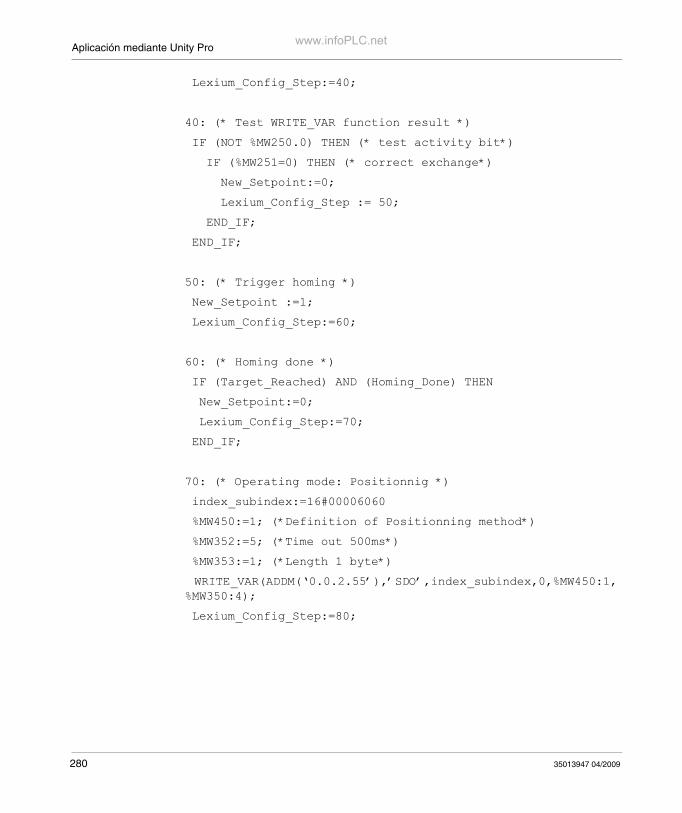
Aplicación mediante Unity Prowww.infoPLC.net
Lexium_Config_Step:=40;
40: (* Test WRITE_VAR function result *)
IF (NOT %MW250.0) THEN (* test activity bit*)
IF (%MW251=0) THEN (* correct exchange*)
New_Setpoint:=0;
Lexium_Config_Step := 50;
END_IF;
END_IF;
50: (* Trigger homing *)
New_Setpoint :=1;
Lexium_Config_Step:=60;
60: (* Homing done *)
IF (Target_Reached) AND (Homing_Done) THEN
New_Setpoint:=0;
Lexium_Config_Step:=70;
END_IF;
70: (* Operating mode: Positionnig *)
index_subindex:=16#00006060
%MW450:=1; (*Definition of Positionning method*)
%MW352:=5; (*Time out 500ms*)
%MW353:=1; (*Length 1 byte*)
WRITE_VAR(ADDM(‘0.0.2.55’),’SDO’,index_subindex,0,%MW450:1, %MW350:4);
Lexium_Config_Step:=80;
280 35013947 04/2009
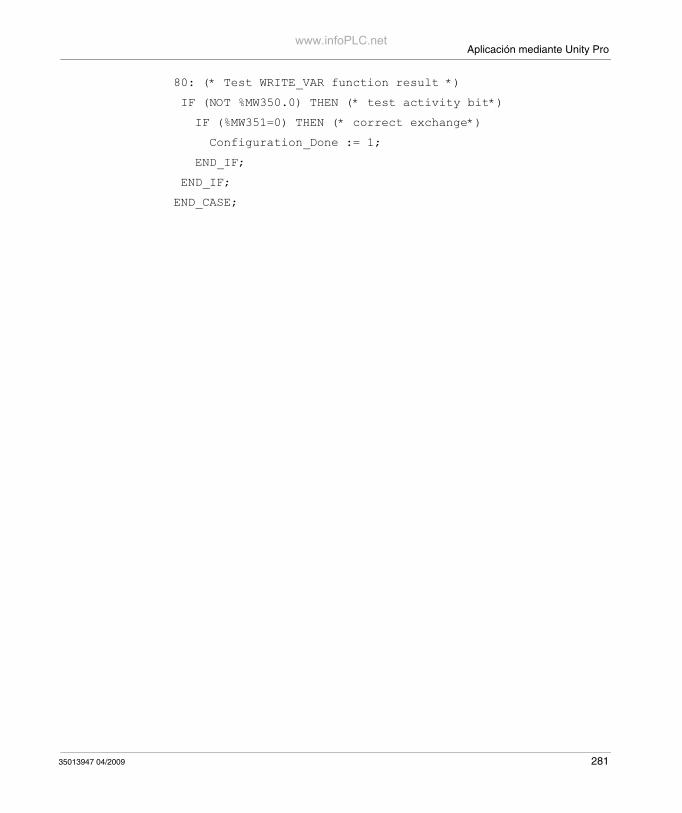
Aplicación mediante Unity Prowww.infoPLC.net
80: (* Test WRITE_VAR function result *)
IF (NOT %MW350.0) THEN (* test activity bit*)
IF (%MW351=0) THEN (* correct exchange*)
Configuration_Done := 1;
END_IF;
END_IF;
END_CASE;
35013947 04/2009 281
Aplicación mediante Unity Prowww.infoPLC.net
Creación de una tabla de animación
Presentación
Se utiliza una tabla de animación para controlar los valores de variables, así como para modificar o forzar estos valores. Únicamente las variables declaradas en Variables e instancias FB pueden agregarse a la tabla de animación.
NOTA: Nota: Para obtener información adicional, consulte la ayuda en línea de Unity Pro (haga clic en ?, Unity, Unity Pro, Modalidades de servicio, Depuración y ajuste, Visualización y ajuste de variables y Tablas de animación).
Procedimiento de creación de una tabla de animación
En la tabla siguiente se detalla el procedimiento que debe seguirse para la creación de una tabla de animación.
Paso Acción
1 En el Explorador de proyectos, hacer clic con el botón derecho del ratón en Tablas de animación y, a continuación, hacer clic en Nueva tabla de animación. Se abre la ventana de edición.
2 Hacer clic en la primera celda de la columna Nombre y, a continuación, pulsar
el botón y agregar las variables necesarias.
282 35013947 04/2009
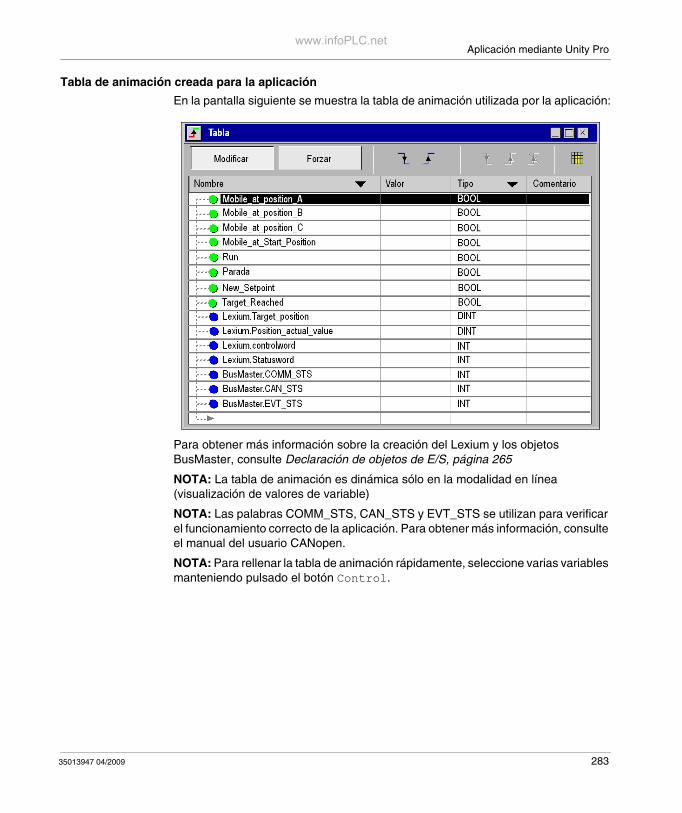
Aplicación mediante Unity Prowww.infoPLC.net
Tabla de animación creada para la aplicación
En la pantalla siguiente se muestra la tabla de animación utilizada por la aplicación:
Para obtener más información sobre la creación del Lexium y los objetos BusMaster, consulte Declaración de objetos de E/S, página 265
NOTA: La tabla de animación es dinámica sólo en la modalidad en línea (visualización de valores de variable)
NOTA: Las palabras COMM_STS, CAN_STS y EVT_STS se utilizan para verificar el funcionamiento correcto de la aplicación. Para obtener más información, consulte el manual del usuario CANopen.
NOTA: Para rellenar la tabla de animación rápidamente, seleccione varias variables manteniendo pulsado el botón Control.
35013947 04/2009 283
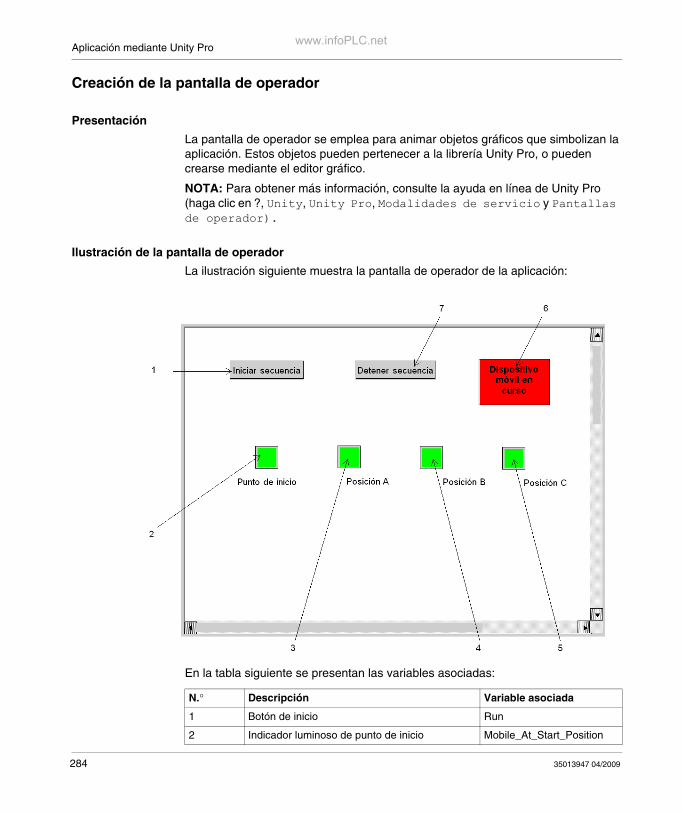
Aplicación mediante Unity Prowww.infoPLC.net
Creación de la pantalla de operador
Presentación
La pantalla de operador se emplea para animar objetos gráficos que simbolizan la aplicación. Estos objetos pueden pertenecer a la librería Unity Pro, o pueden crearse mediante el editor gráfico.
NOTA: Para obtener más información, consulte la ayuda en línea de Unity Pro (haga clic en ?, Unity, Unity Pro, Modalidades de servicio y Pantallas de operador).
Ilustración de la pantalla de operador
La ilustración siguiente muestra la pantalla de operador de la aplicación:
En la tabla siguiente se presentan las variables asociadas:
N.° Descripción Variable asociada
1 Botón de inicio Run
2 Indicador luminoso de punto de inicio Mobile_At_Start_Position
284 35013947 04/2009
Aplicación mediante Unity Prowww.infoPLC.net
NOTA: Para animar objetos en modalidad en línea, debe hacer clic en . Al hacer
clic en este botón, puede validar lo que está escrito.
Procedimiento de creación de una pantalla de operador
En la tabla siguiente, se detalla el procedimiento que debe seguirse para la creación del botón Inicio.
En la tabla siguiente se detalla el procedimiento que debe seguirse para insertar y animar la señalización luminosa.
3 Indicador luminoso de la posición A Mobile_At_Position_A
4 Indicador luminoso de la posición B Mobile_At_Position_B
5 Indicador luminoso de la posición C Mobile_At_Position_C
6 Indicador luminoso de Dispositivo móvil en curso Mobile_in_Progress
7 Botón de parada Detener
N.° Descripción Variable asociada
Paso Acción
1 En el Explorador de proyectos, hacer clic con el botón derecho del ratón en Pantallas de operador y hacer clic en Nueva pantalla.Aparece el editor de pantallas de operador.
2 Hacer clic en y colocar el nuevo botón en la pantalla de operador. Hacer doble clic en el botón y en la ficha Control, seleccionar la variable Run
haciendo clic en el botón y confirmar con Aceptar. A continuación, introducir el nombre del botón en el área de texto.
Paso Acción
1 En el menú Herramientas, seleccionar Librería de pantallas de operador. Hacer doble clic en Unidad de visualización y en Señalización luminosa. Seleccionar la luz verde dinámica de la pantalla de ejecución y Copiar (Ctrl+C) y Pegar (Ctrl+V) en el editor de la pantalla de operador.
2La luz aparece en la pantalla de operador. Seleccionar la luz y hacer clic en .Pulsar Intro y se abrirá la ventana de propiedades del objeto. Seleccionar la
ficha Animación e introducir la variable implicada haciendo clic en el botón (en lugar de %MW1.0).
Hacer clic en e introducir la misma variable.
3 Confirmar mediante Aplicar y Aceptar.
35013947 04/2009 285

Aplicación mediante Unity Pro
286 35013947 04/2009
www.infoPLC.net
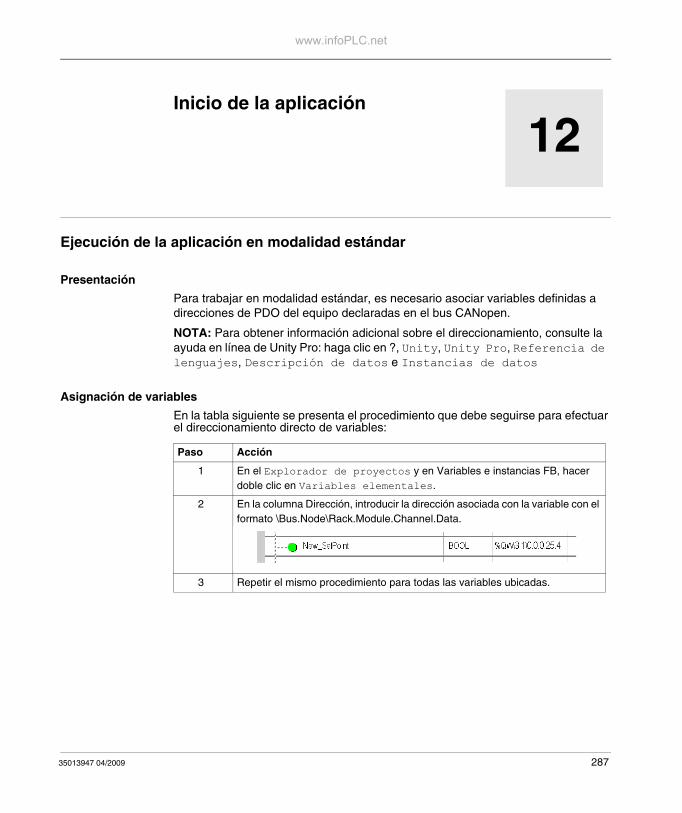
35013947 04/2009
12
Inicio de la aplicación
35013947 04/2009
www.infoPLC.net
Inicio de la aplicación
Ejecución de la aplicación en modalidad estándar
Presentación
Para trabajar en modalidad estándar, es necesario asociar variables definidas a direcciones de PDO del equipo declaradas en el bus CANopen.
NOTA: Para obtener información adicional sobre el direccionamiento, consulte la ayuda en línea de Unity Pro: haga clic en ?, Unity, Unity Pro, Referencia de lenguajes, Descripción de datos e Instancias de datos
Asignación de variables
En la tabla siguiente se presenta el procedimiento que debe seguirse para efectuar el direccionamiento directo de variables:
Paso Acción
1 En el Explorador de proyectos y en Variables e instancias FB, hacer doble clic en Variables elementales.
2 En la columna Dirección, introducir la dirección asociada con la variable con el formato \Bus.Node\Rack.Module.Channel.Data.
3 Repetir el mismo procedimiento para todas las variables ubicadas.
287
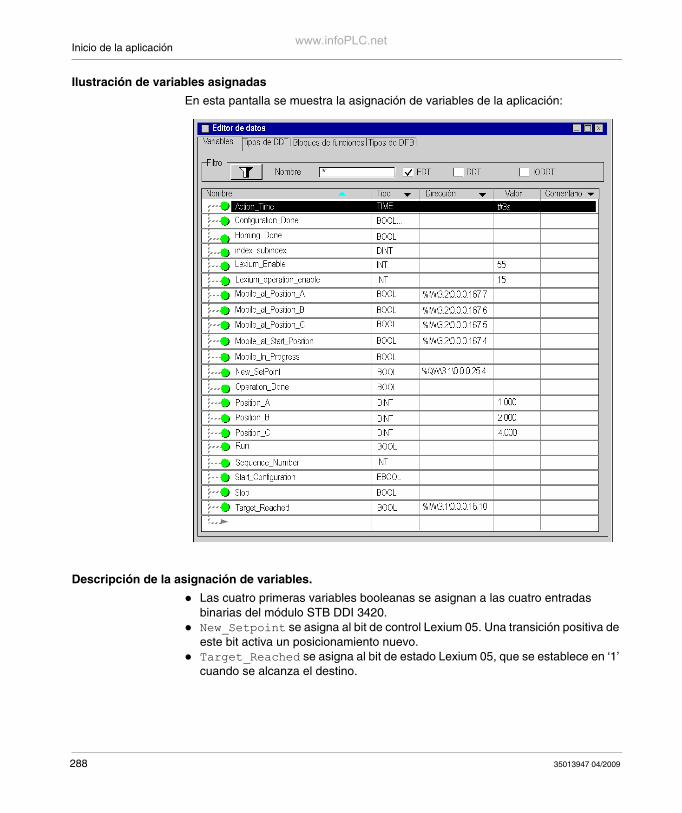
Inicio de la aplicaciónwww.infoPLC.net
Ilustración de variables asignadas
En esta pantalla se muestra la asignación de variables de la aplicación:
Descripción de la asignación de variables.
Las cuatro primeras variables booleanas se asignan a las cuatro entradas binarias del módulo STB DDI 3420.
New_Setpoint se asigna al bit de control Lexium 05. Una transición positiva de este bit activa un posicionamiento nuevo.
Target_Reached se asigna al bit de estado Lexium 05, que se establece en ‘1’ cuando se alcanza el destino.
288 35013947 04/2009
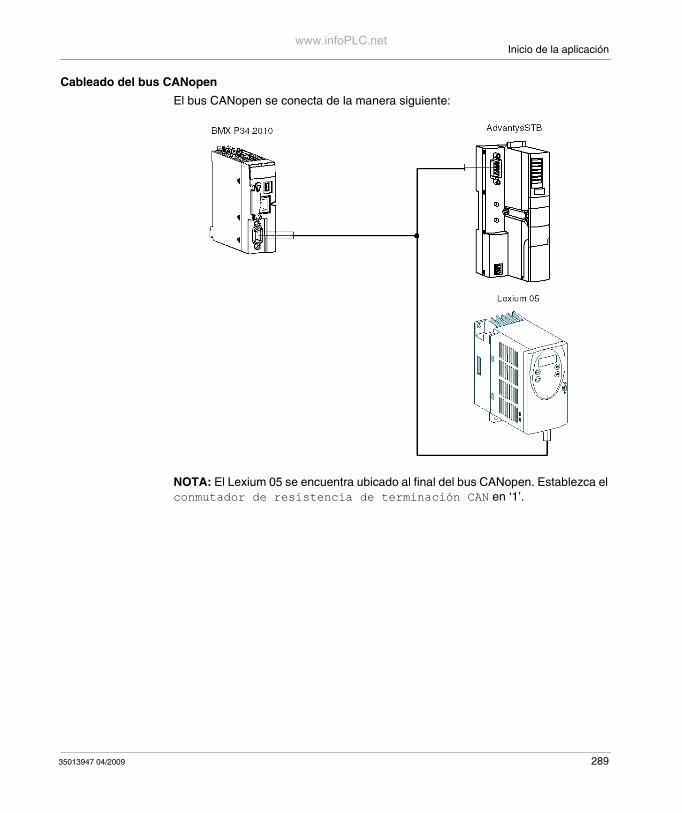
Inicio de la aplicaciónwww.infoPLC.net
Cableado del bus CANopen
El bus CANopen se conecta de la manera siguiente:
NOTA: El Lexium 05 se encuentra ubicado al final del bus CANopen. Establezca el conmutador de resistencia de terminación CAN en ‘1’.
35013947 04/2009 289
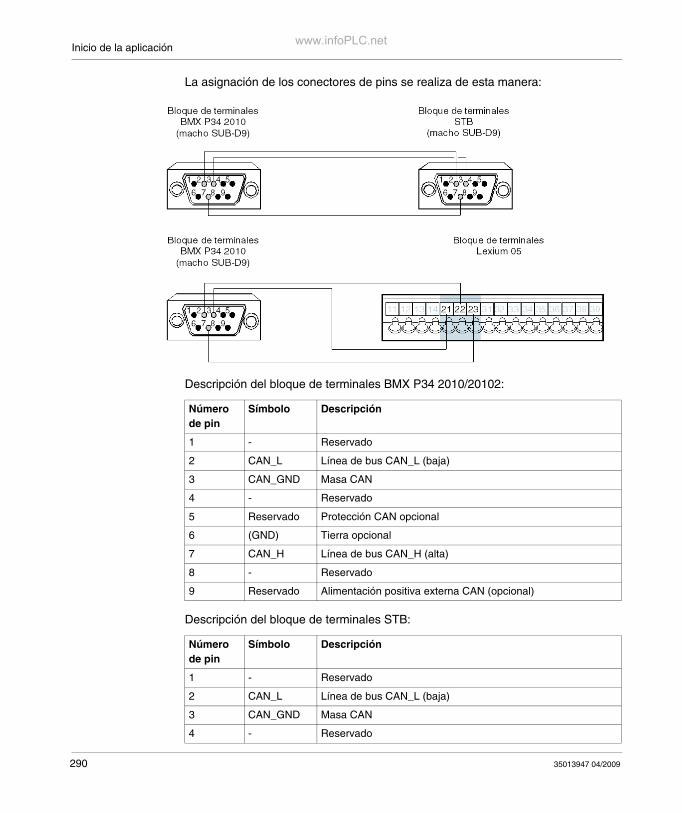
Inicio de la aplicaciónwww.infoPLC.net
La asignación de los conectores de pins se realiza de esta manera:
Descripción del bloque de terminales BMX P34 2010/20102:
Descripción del bloque de terminales STB:
Número de pin
Símbolo Descripción
1 - Reservado
2 CAN_L Línea de bus CAN_L (baja)
3 CAN_GND Masa CAN
4 - Reservado
5 Reservado Protección CAN opcional
6 (GND) Tierra opcional
7 CAN_H Línea de bus CAN_H (alta)
8 - Reservado
9 Reservado Alimentación positiva externa CAN (opcional)
Número de pin
Símbolo Descripción
1 - Reservado
2 CAN_L Línea de bus CAN_L (baja)
3 CAN_GND Masa CAN
4 - Reservado
290 35013947 04/2009
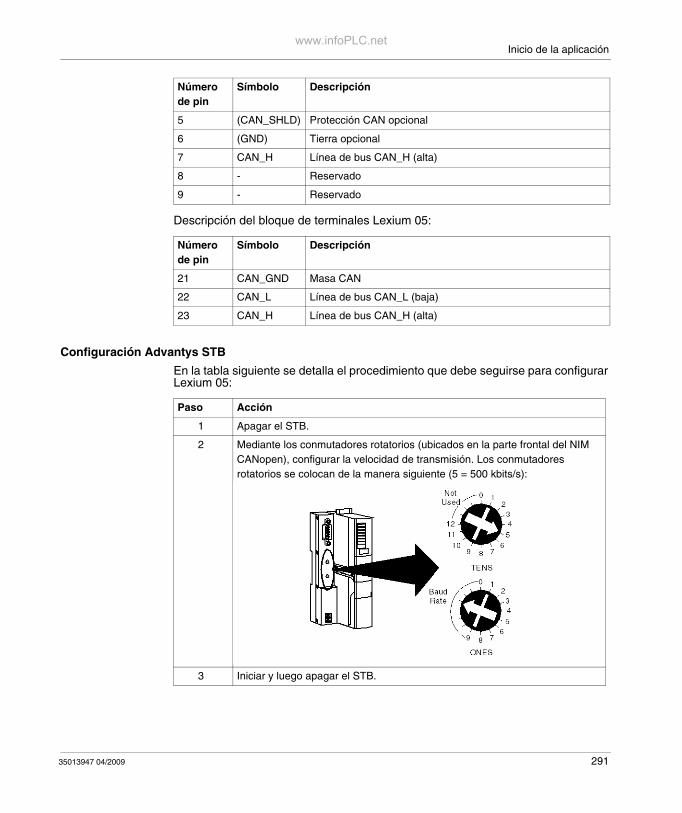
Inicio de la aplicaciónwww.infoPLC.net
Descripción del bloque de terminales Lexium 05:
Configuración Advantys STB
En la tabla siguiente se detalla el procedimiento que debe seguirse para configurar Lexium 05:
5 (CAN_SHLD) Protección CAN opcional
6 (GND) Tierra opcional
7 CAN_H Línea de bus CAN_H (alta)
8 - Reservado
9 - Reservado
Número de pin
Símbolo Descripción
21 CAN_GND Masa CAN
22 CAN_L Línea de bus CAN_L (baja)
23 CAN_H Línea de bus CAN_H (alta)
Número de pin
Símbolo Descripción
Paso Acción
1 Apagar el STB.
2 Mediante los conmutadores rotatorios (ubicados en la parte frontal del NIM CANopen), configurar la velocidad de transmisión. Los conmutadores rotatorios se colocan de la manera siguiente (5 = 500 kbits/s):
3 Iniciar y luego apagar el STB.
35013947 04/2009 291
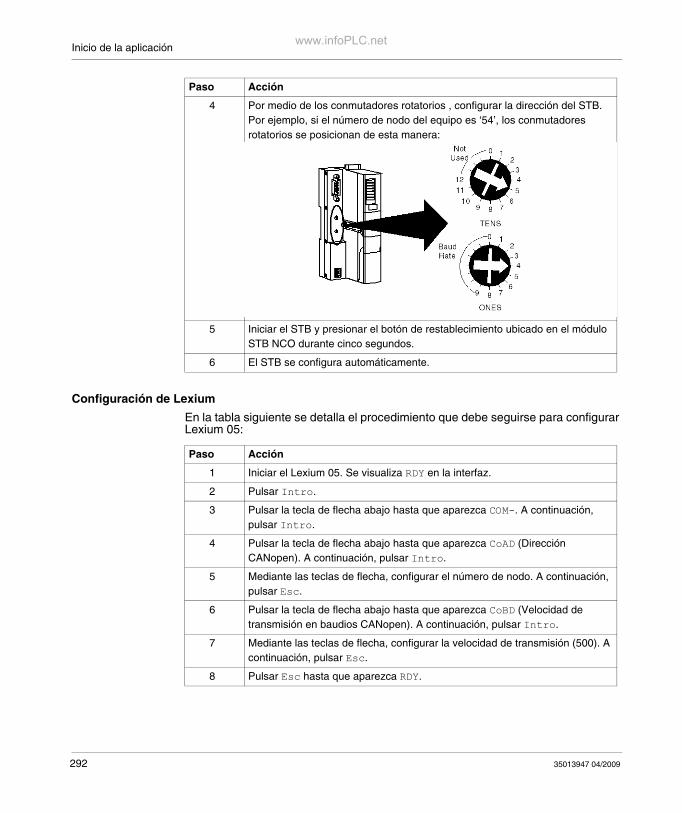
Inicio de la aplicaciónwww.infoPLC.net
Configuración de Lexium
En la tabla siguiente se detalla el procedimiento que debe seguirse para configurar Lexium 05:
4 Por medio de los conmutadores rotatorios , configurar la dirección del STB. Por ejemplo, si el número de nodo del equipo es ‘54’, los conmutadores rotatorios se posicionan de esta manera:
5 Iniciar el STB y presionar el botón de restablecimiento ubicado en el módulo STB NCO durante cinco segundos.
6 El STB se configura automáticamente.
Paso Acción
Paso Acción
1 Iniciar el Lexium 05. Se visualiza RDY en la interfaz.
2 Pulsar Intro.
3 Pulsar la tecla de flecha abajo hasta que aparezca COM-. A continuación, pulsar Intro.
4 Pulsar la tecla de flecha abajo hasta que aparezca CoAD (Dirección CANopen). A continuación, pulsar Intro.
5 Mediante las teclas de flecha, configurar el número de nodo. A continuación, pulsar Esc.
6 Pulsar la tecla de flecha abajo hasta que aparezca CoBD (Velocidad de transmisión en baudios CANopen). A continuación, pulsar Intro.
7 Mediante las teclas de flecha, configurar la velocidad de transmisión (500). A continuación, pulsar Esc.
8 Pulsar Esc hasta que aparezca RDY.
292 35013947 04/2009
35013947 04/2009
www.infoPLC.net
Apéndices
Descripción general
Estos apéndices contienen información que debería resultar útil para programar la aplicación.
Contenido de este anexo
Este anexo contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
A Entrada del diccionario de objetos local del maestro CANopen 295
B Relación entre PDO y variables STB 311
C Acciones y transiciones 315
35013947 04/2009 293

294 35013947 04/2009
www.infoPLC.net
35013947 04/2009
A
Diccionario de objetos del maestro CANopen
35013947 04/2009
www.infoPLC.net
Entrada del diccionario de objetos local del maestro CANopen
Objeto
En este capítulo se describe la entrada del diccionario de objetos local para el maestro CANopen.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Inserciones del diccionario de objetos según el perfil DS301 296
Entradas del diccionario de objetos según el perfil DS302 301
Inserciones de diccionario de objetos específicos del fabricante Midrange 303
295
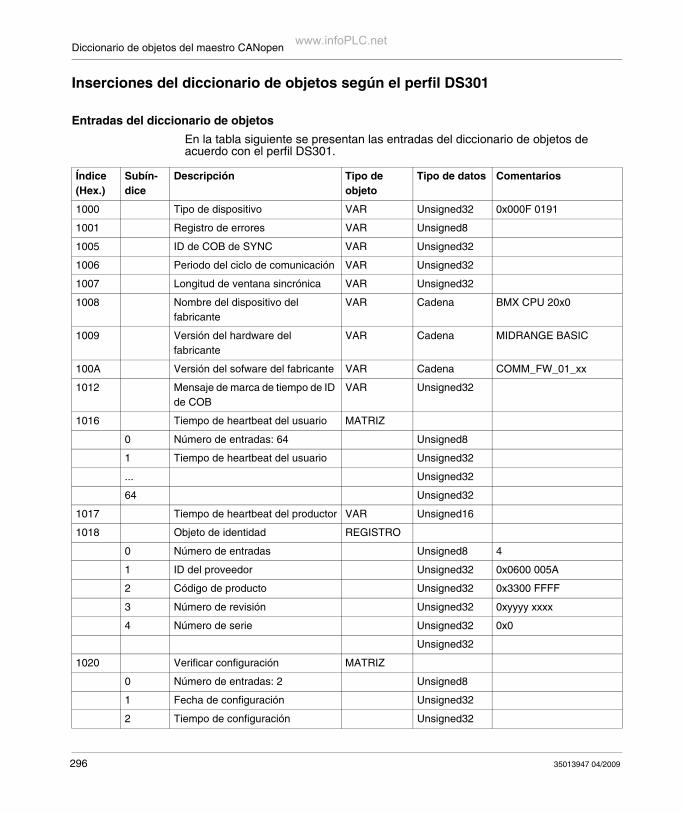
Diccionario de objetos del maestro CANopenwww.infoPLC.net
Inserciones del diccionario de objetos según el perfil DS301
Entradas del diccionario de objetos
En la tabla siguiente se presentan las entradas del diccionario de objetos de acuerdo con el perfil DS301.
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
1000 Tipo de dispositivo VAR Unsigned32 0x000F 0191
1001 Registro de errores VAR Unsigned8
1005 ID de COB de SYNC VAR Unsigned32
1006 Periodo del ciclo de comunicación VAR Unsigned32
1007 Longitud de ventana sincrónica VAR Unsigned32
1008 Nombre del dispositivo del fabricante
VAR Cadena BMX CPU 20x0
1009 Versión del hardware del fabricante
VAR Cadena MIDRANGE BASIC
100A Versión del sofware del fabricante VAR Cadena COMM_FW_01_xx
1012 Mensaje de marca de tiempo de ID de COB
VAR Unsigned32
1016 Tiempo de heartbeat del usuario MATRIZ
0 Número de entradas: 64 Unsigned8
1 Tiempo de heartbeat del usuario Unsigned32
... Unsigned32
64 Unsigned32
1017 Tiempo de heartbeat del productor VAR Unsigned16
1018 Objeto de identidad REGISTRO
0 Número de entradas Unsigned8 4
1 ID del proveedor Unsigned32 0x0600 005A
2 Código de producto Unsigned32 0x3300 FFFF
3 Número de revisión Unsigned32 0xyyyy xxxx
4 Número de serie Unsigned32 0x0
Unsigned32
1020 Verificar configuración MATRIZ
0 Número de entradas: 2 Unsigned8
1 Fecha de configuración Unsigned32
2 Tiempo de configuración Unsigned32
296 35013947 04/2009
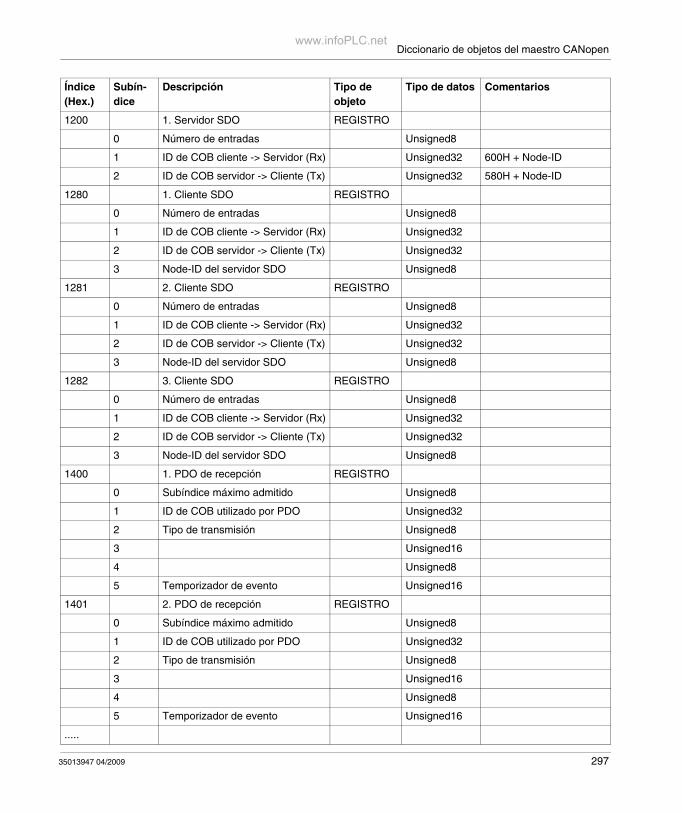
Diccionario de objetos del maestro CANopenwww.infoPLC.net
1200 1. Servidor SDO REGISTRO
0 Número de entradas Unsigned8
1 ID de COB cliente -> Servidor (Rx) Unsigned32 600H + Node-ID
2 ID de COB servidor -> Cliente (Tx) Unsigned32 580H + Node-ID
1280 1. Cliente SDO REGISTRO
0 Número de entradas Unsigned8
1 ID de COB cliente -> Servidor (Rx) Unsigned32
2 ID de COB servidor -> Cliente (Tx) Unsigned32
3 Node-ID del servidor SDO Unsigned8
1281 2. Cliente SDO REGISTRO
0 Número de entradas Unsigned8
1 ID de COB cliente -> Servidor (Rx) Unsigned32
2 ID de COB servidor -> Cliente (Tx) Unsigned32
3 Node-ID del servidor SDO Unsigned8
1282 3. Cliente SDO REGISTRO
0 Número de entradas Unsigned8
1 ID de COB cliente -> Servidor (Rx) Unsigned32
2 ID de COB servidor -> Cliente (Tx) Unsigned32
3 Node-ID del servidor SDO Unsigned8
1400 1. PDO de recepción REGISTRO
0 Subíndice máximo admitido Unsigned8
1 ID de COB utilizado por PDO Unsigned32
2 Tipo de transmisión Unsigned8
3 Unsigned16
4 Unsigned8
5 Temporizador de evento Unsigned16
1401 2. PDO de recepción REGISTRO
0 Subíndice máximo admitido Unsigned8
1 ID de COB utilizado por PDO Unsigned32
2 Tipo de transmisión Unsigned8
3 Unsigned16
4 Unsigned8
5 Temporizador de evento Unsigned16
.....
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
35013947 04/2009 297
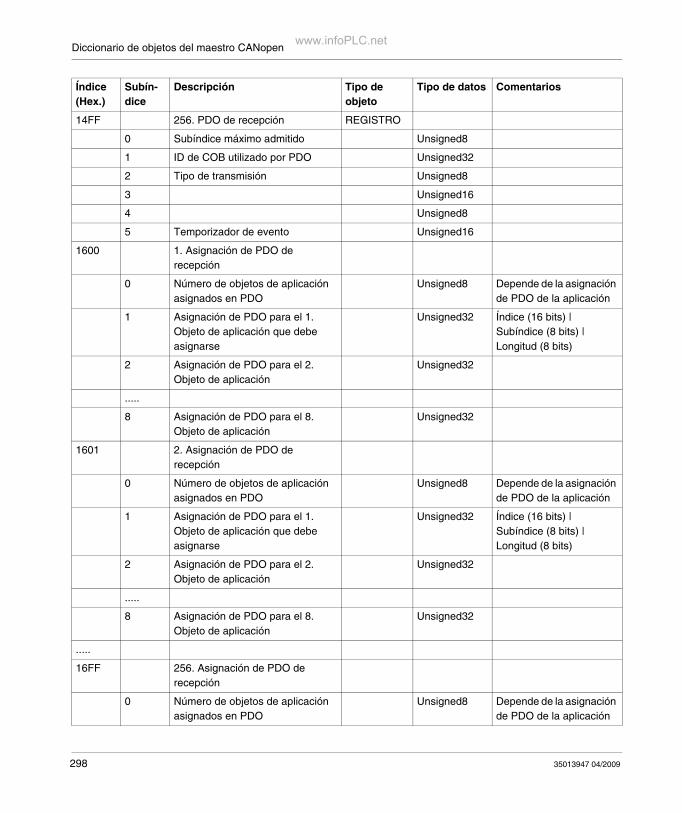
Diccionario de objetos del maestro CANopenwww.infoPLC.net
14FF 256. PDO de recepción REGISTRO
0 Subíndice máximo admitido Unsigned8
1 ID de COB utilizado por PDO Unsigned32
2 Tipo de transmisión Unsigned8
3 Unsigned16
4 Unsigned8
5 Temporizador de evento Unsigned16
1600 1. Asignación de PDO de recepción
0 Número de objetos de aplicación asignados en PDO
Unsigned8 Depende de la asignación de PDO de la aplicación
1 Asignación de PDO para el 1. Objeto de aplicación que debe asignarse
Unsigned32 Índice (16 bits) | Subíndice (8 bits) | Longitud (8 bits)
2 Asignación de PDO para el 2. Objeto de aplicación
Unsigned32
.....
8 Asignación de PDO para el 8. Objeto de aplicación
Unsigned32
1601 2. Asignación de PDO de recepción
0 Número de objetos de aplicación asignados en PDO
Unsigned8 Depende de la asignación de PDO de la aplicación
1 Asignación de PDO para el 1. Objeto de aplicación que debe asignarse
Unsigned32 Índice (16 bits) | Subíndice (8 bits) | Longitud (8 bits)
2 Asignación de PDO para el 2. Objeto de aplicación
Unsigned32
.....
8 Asignación de PDO para el 8. Objeto de aplicación
Unsigned32
.....
16FF 256. Asignación de PDO de recepción
0 Número de objetos de aplicación asignados en PDO
Unsigned8 Depende de la asignación de PDO de la aplicación
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
298 35013947 04/2009
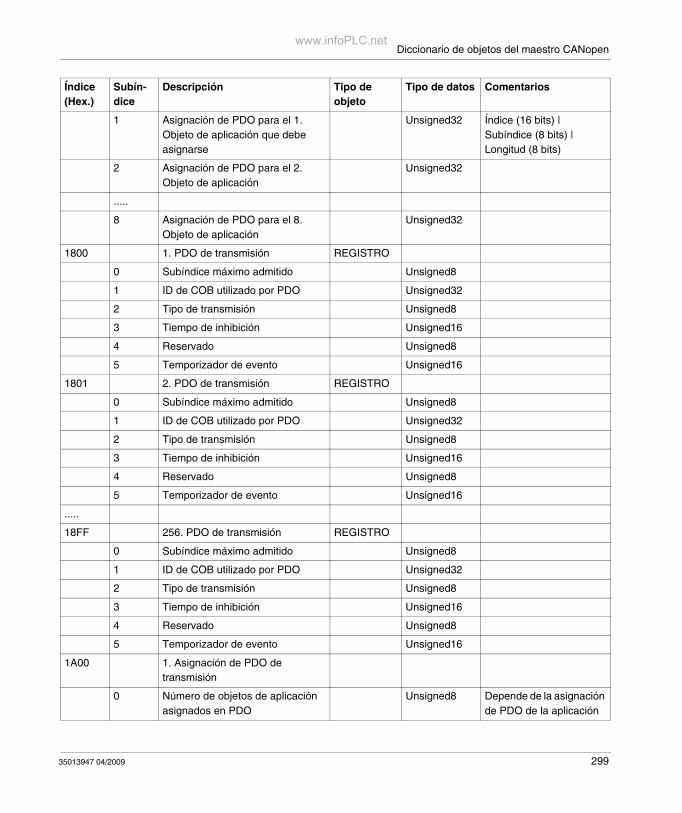
Diccionario de objetos del maestro CANopenwww.infoPLC.net
1 Asignación de PDO para el 1. Objeto de aplicación que debe asignarse
Unsigned32 Índice (16 bits) | Subíndice (8 bits) | Longitud (8 bits)
2 Asignación de PDO para el 2. Objeto de aplicación
Unsigned32
.....
8 Asignación de PDO para el 8. Objeto de aplicación
Unsigned32
1800 1. PDO de transmisión REGISTRO
0 Subíndice máximo admitido Unsigned8
1 ID de COB utilizado por PDO Unsigned32
2 Tipo de transmisión Unsigned8
3 Tiempo de inhibición Unsigned16
4 Reservado Unsigned8
5 Temporizador de evento Unsigned16
1801 2. PDO de transmisión REGISTRO
0 Subíndice máximo admitido Unsigned8
1 ID de COB utilizado por PDO Unsigned32
2 Tipo de transmisión Unsigned8
3 Tiempo de inhibición Unsigned16
4 Reservado Unsigned8
5 Temporizador de evento Unsigned16
.....
18FF 256. PDO de transmisión REGISTRO
0 Subíndice máximo admitido Unsigned8
1 ID de COB utilizado por PDO Unsigned32
2 Tipo de transmisión Unsigned8
3 Tiempo de inhibición Unsigned16
4 Reservado Unsigned8
5 Temporizador de evento Unsigned16
1A00 1. Asignación de PDO de transmisión
0 Número de objetos de aplicación asignados en PDO
Unsigned8 Depende de la asignación de PDO de la aplicación
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
35013947 04/2009 299
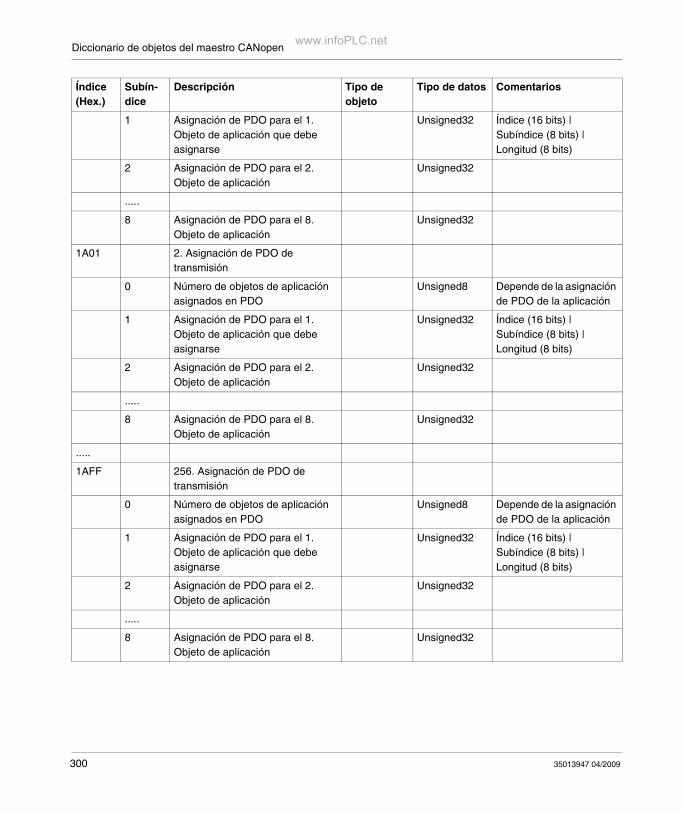
Diccionario de objetos del maestro CANopenwww.infoPLC.net
1 Asignación de PDO para el 1. Objeto de aplicación que debe asignarse
Unsigned32 Índice (16 bits) | Subíndice (8 bits) | Longitud (8 bits)
2 Asignación de PDO para el 2. Objeto de aplicación
Unsigned32
.....
8 Asignación de PDO para el 8. Objeto de aplicación
Unsigned32
1A01 2. Asignación de PDO de transmisión
0 Número de objetos de aplicación asignados en PDO
Unsigned8 Depende de la asignación de PDO de la aplicación
1 Asignación de PDO para el 1. Objeto de aplicación que debe asignarse
Unsigned32 Índice (16 bits) | Subíndice (8 bits) | Longitud (8 bits)
2 Asignación de PDO para el 2. Objeto de aplicación
Unsigned32
.....
8 Asignación de PDO para el 8. Objeto de aplicación
Unsigned32
.....
1AFF 256. Asignación de PDO de transmisión
0 Número de objetos de aplicación asignados en PDO
Unsigned8 Depende de la asignación de PDO de la aplicación
1 Asignación de PDO para el 1. Objeto de aplicación que debe asignarse
Unsigned32 Índice (16 bits) | Subíndice (8 bits) | Longitud (8 bits)
2 Asignación de PDO para el 2. Objeto de aplicación
Unsigned32
.....
8 Asignación de PDO para el 8. Objeto de aplicación
Unsigned32
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
300 35013947 04/2009
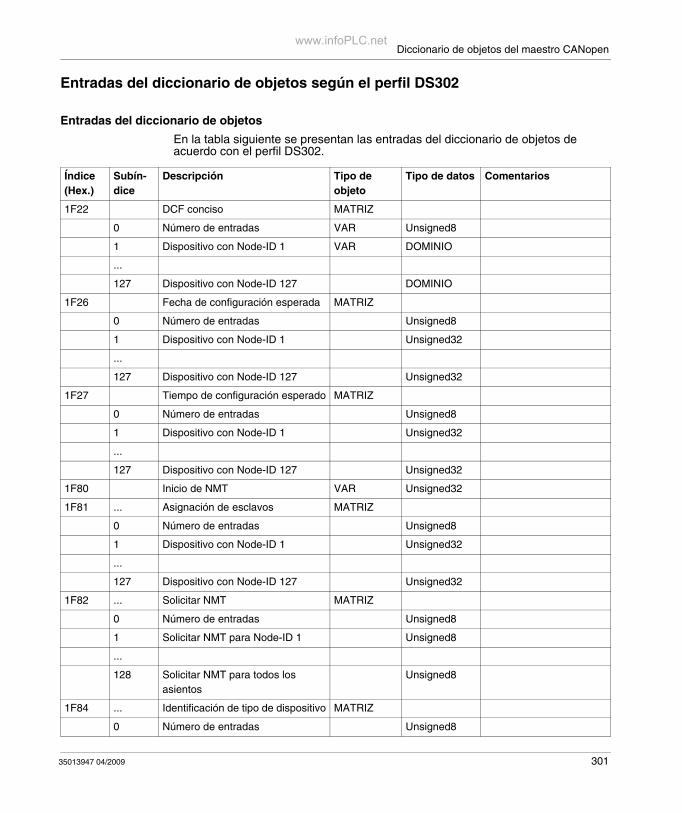
Diccionario de objetos del maestro CANopenwww.infoPLC.net
Entradas del diccionario de objetos según el perfil DS302
Entradas del diccionario de objetos
En la tabla siguiente se presentan las entradas del diccionario de objetos de acuerdo con el perfil DS302.
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
1F22 DCF conciso MATRIZ
0 Número de entradas VAR Unsigned8
1 Dispositivo con Node-ID 1 VAR DOMINIO
...
127 Dispositivo con Node-ID 127 DOMINIO
1F26 Fecha de configuración esperada MATRIZ
0 Número de entradas Unsigned8
1 Dispositivo con Node-ID 1 Unsigned32
...
127 Dispositivo con Node-ID 127 Unsigned32
1F27 Tiempo de configuración esperado MATRIZ
0 Número de entradas Unsigned8
1 Dispositivo con Node-ID 1 Unsigned32
...
127 Dispositivo con Node-ID 127 Unsigned32
1F80 Inicio de NMT VAR Unsigned32
1F81 ... Asignación de esclavos MATRIZ
0 Número de entradas Unsigned8
1 Dispositivo con Node-ID 1 Unsigned32
...
127 Dispositivo con Node-ID 127 Unsigned32
1F82 ... Solicitar NMT MATRIZ
0 Número de entradas Unsigned8
1 Solicitar NMT para Node-ID 1 Unsigned8
...
128 Solicitar NMT para todos los asientos
Unsigned8
1F84 ... Identificación de tipo de dispositivo MATRIZ
0 Número de entradas Unsigned8
35013947 04/2009 301
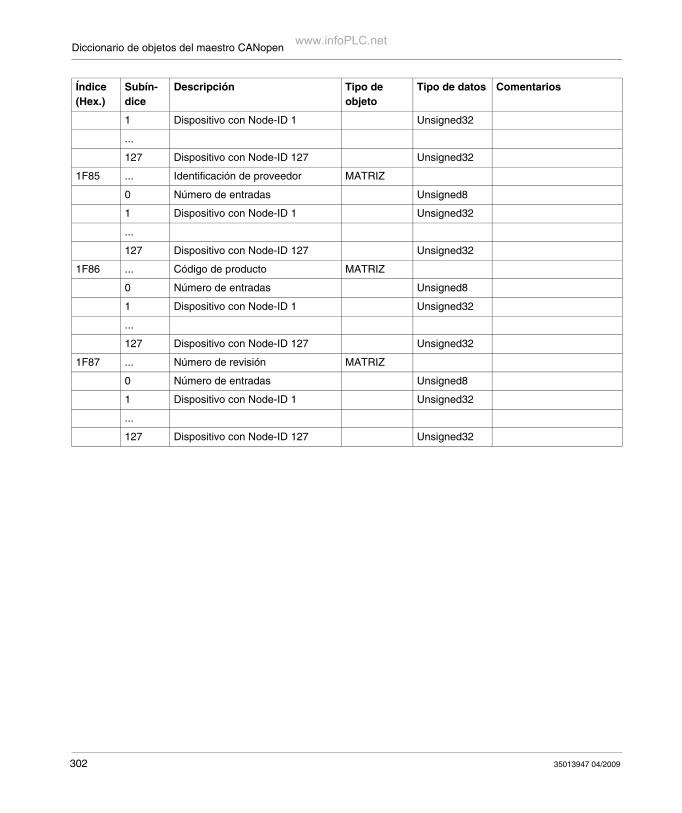
Diccionario de objetos del maestro CANopenwww.infoPLC.net
1 Dispositivo con Node-ID 1 Unsigned32
...
127 Dispositivo con Node-ID 127 Unsigned32
1F85 ... Identificación de proveedor MATRIZ
0 Número de entradas Unsigned8
1 Dispositivo con Node-ID 1 Unsigned32
...
127 Dispositivo con Node-ID 127 Unsigned32
1F86 ... Código de producto MATRIZ
0 Número de entradas Unsigned8
1 Dispositivo con Node-ID 1 Unsigned32
...
127 Dispositivo con Node-ID 127 Unsigned32
1F87 ... Número de revisión MATRIZ
0 Número de entradas Unsigned8
1 Dispositivo con Node-ID 1 Unsigned32
...
127 Dispositivo con Node-ID 127 Unsigned32
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
302 35013947 04/2009
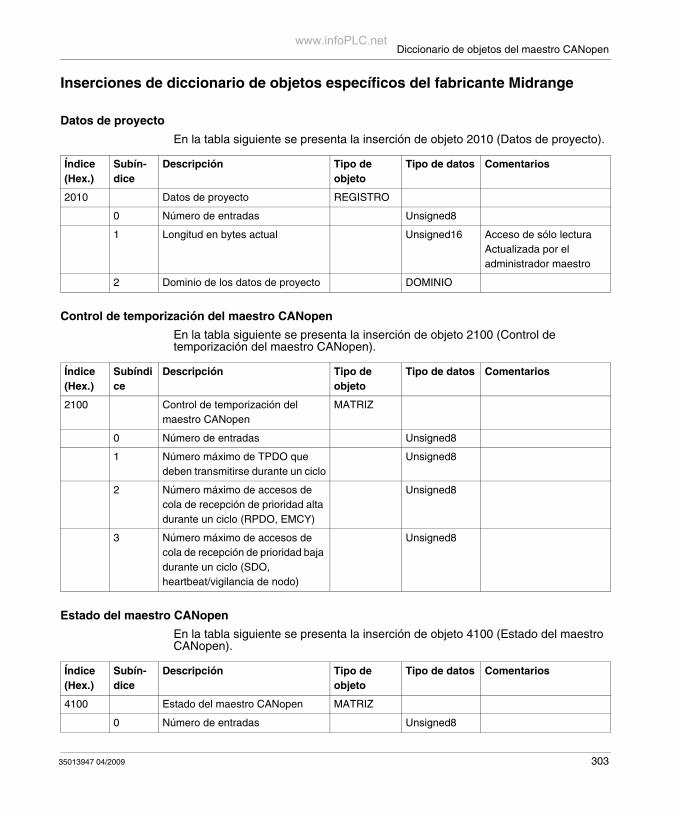
Diccionario de objetos del maestro CANopenwww.infoPLC.net
Inserciones de diccionario de objetos específicos del fabricante Midrange
Datos de proyecto
En la tabla siguiente se presenta la inserción de objeto 2010 (Datos de proyecto).
Control de temporización del maestro CANopen
En la tabla siguiente se presenta la inserción de objeto 2100 (Control de temporización del maestro CANopen).
Estado del maestro CANopen
En la tabla siguiente se presenta la inserción de objeto 4100 (Estado del maestro CANopen).
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
2010 Datos de proyecto REGISTRO
0 Número de entradas Unsigned8
1 Longitud en bytes actual Unsigned16 Acceso de sólo lecturaActualizada por el administrador maestro
2 Dominio de los datos de proyecto DOMINIO
Índice (Hex.)
Subíndice
Descripción Tipo de objeto
Tipo de datos Comentarios
2100 Control de temporización del maestro CANopen
MATRIZ
0 Número de entradas Unsigned8
1 Número máximo de TPDO que deben transmitirse durante un ciclo
Unsigned8
2 Número máximo de accesos de cola de recepción de prioridad alta durante un ciclo (RPDO, EMCY)
Unsigned8
3 Número máximo de accesos de cola de recepción de prioridad baja durante un ciclo (SDO, heartbeat/vigilancia de nodo)
Unsigned8
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4100 Estado del maestro CANopen MATRIZ
0 Número de entradas Unsigned8
35013947 04/2009 303
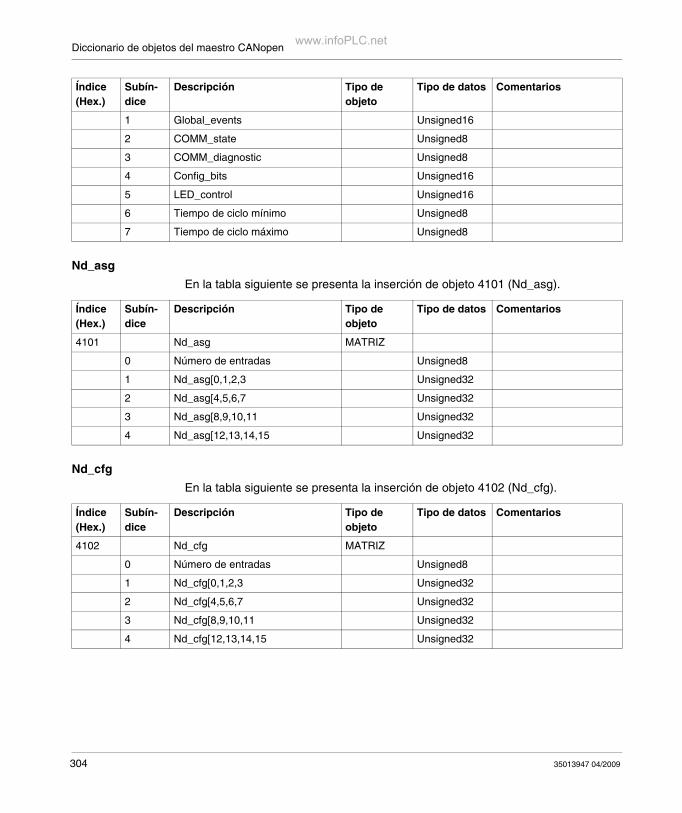
Diccionario de objetos del maestro CANopenwww.infoPLC.net
Nd_asg
En la tabla siguiente se presenta la inserción de objeto 4101 (Nd_asg).
Nd_cfg
En la tabla siguiente se presenta la inserción de objeto 4102 (Nd_cfg).
1 Global_events Unsigned16
2 COMM_state Unsigned8
3 COMM_diagnostic Unsigned8
4 Config_bits Unsigned16
5 LED_control Unsigned16
6 Tiempo de ciclo mínimo Unsigned8
7 Tiempo de ciclo máximo Unsigned8
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4101 Nd_asg MATRIZ
0 Número de entradas Unsigned8
1 Nd_asg[0,1,2,3 Unsigned32
2 Nd_asg[4,5,6,7 Unsigned32
3 Nd_asg[8,9,10,11 Unsigned32
4 Nd_asg[12,13,14,15 Unsigned32
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4102 Nd_cfg MATRIZ
0 Número de entradas Unsigned8
1 Nd_cfg[0,1,2,3 Unsigned32
2 Nd_cfg[4,5,6,7 Unsigned32
3 Nd_cfg[8,9,10,11 Unsigned32
4 Nd_cfg[12,13,14,15 Unsigned32
304 35013947 04/2009
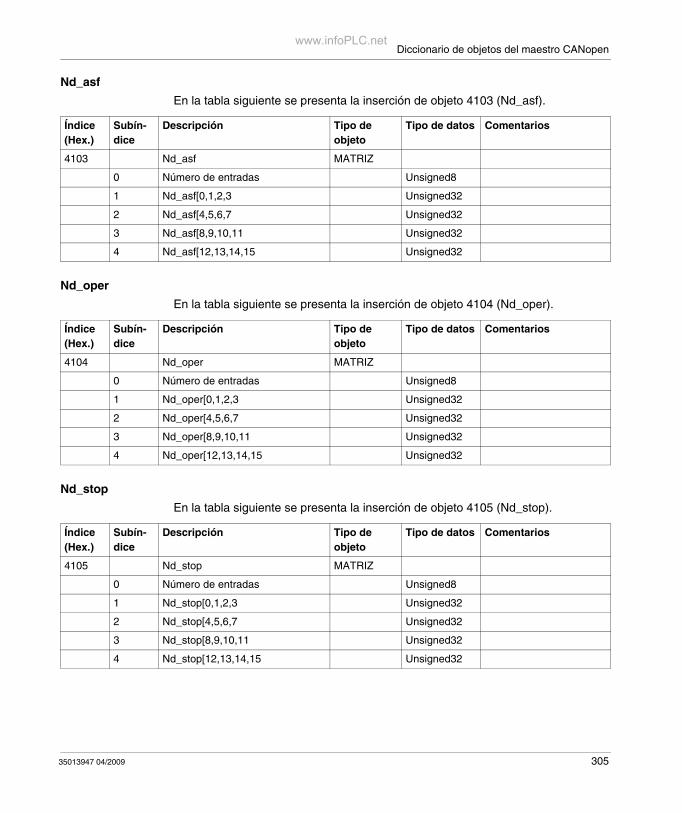
Diccionario de objetos del maestro CANopenwww.infoPLC.net
Nd_asf
En la tabla siguiente se presenta la inserción de objeto 4103 (Nd_asf).
Nd_oper
En la tabla siguiente se presenta la inserción de objeto 4104 (Nd_oper).
Nd_stop
En la tabla siguiente se presenta la inserción de objeto 4105 (Nd_stop).
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4103 Nd_asf MATRIZ
0 Número de entradas Unsigned8
1 Nd_asf[0,1,2,3 Unsigned32
2 Nd_asf[4,5,6,7 Unsigned32
3 Nd_asf[8,9,10,11 Unsigned32
4 Nd_asf[12,13,14,15 Unsigned32
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4104 Nd_oper MATRIZ
0 Número de entradas Unsigned8
1 Nd_oper[0,1,2,3 Unsigned32
2 Nd_oper[4,5,6,7 Unsigned32
3 Nd_oper[8,9,10,11 Unsigned32
4 Nd_oper[12,13,14,15 Unsigned32
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4105 Nd_stop MATRIZ
0 Número de entradas Unsigned8
1 Nd_stop[0,1,2,3 Unsigned32
2 Nd_stop[4,5,6,7 Unsigned32
3 Nd_stop[8,9,10,11 Unsigned32
4 Nd_stop[12,13,14,15 Unsigned32
35013947 04/2009 305
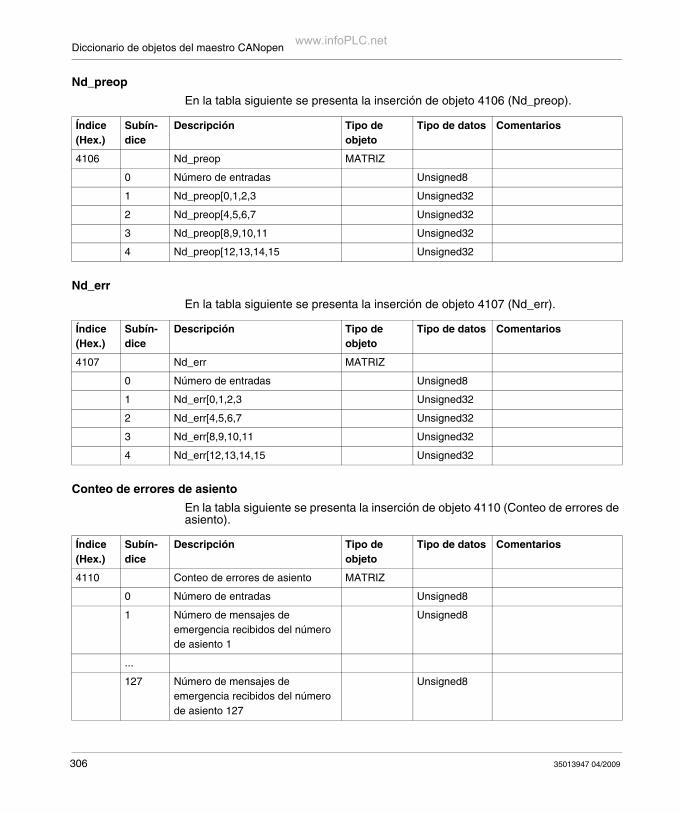
Diccionario de objetos del maestro CANopenwww.infoPLC.net
Nd_preop
En la tabla siguiente se presenta la inserción de objeto 4106 (Nd_preop).
Nd_err
En la tabla siguiente se presenta la inserción de objeto 4107 (Nd_err).
Conteo de errores de asiento
En la tabla siguiente se presenta la inserción de objeto 4110 (Conteo de errores de asiento).
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4106 Nd_preop MATRIZ
0 Número de entradas Unsigned8
1 Nd_preop[0,1,2,3 Unsigned32
2 Nd_preop[4,5,6,7 Unsigned32
3 Nd_preop[8,9,10,11 Unsigned32
4 Nd_preop[12,13,14,15 Unsigned32
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4107 Nd_err MATRIZ
0 Número de entradas Unsigned8
1 Nd_err[0,1,2,3 Unsigned32
2 Nd_err[4,5,6,7 Unsigned32
3 Nd_err[8,9,10,11 Unsigned32
4 Nd_err[12,13,14,15 Unsigned32
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4110 Conteo de errores de asiento MATRIZ
0 Número de entradas Unsigned8
1 Número de mensajes de emergencia recibidos del número de asiento 1
Unsigned8
...
127 Número de mensajes de emergencia recibidos del número de asiento 127
Unsigned8
306 35013947 04/2009
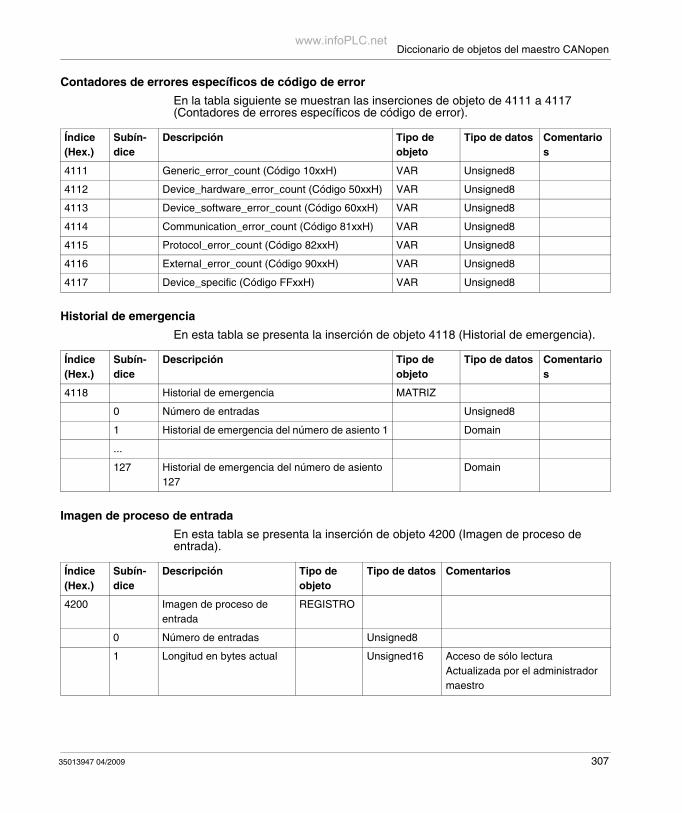
Diccionario de objetos del maestro CANopenwww.infoPLC.net
Contadores de errores específicos de código de error
En la tabla siguiente se muestran las inserciones de objeto de 4111 a 4117 (Contadores de errores específicos de código de error).
Historial de emergencia
En esta tabla se presenta la inserción de objeto 4118 (Historial de emergencia).
Imagen de proceso de entrada
En esta tabla se presenta la inserción de objeto 4200 (Imagen de proceso de entrada).
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4111 Generic_error_count (Código 10xxH) VAR Unsigned8
4112 Device_hardware_error_count (Código 50xxH) VAR Unsigned8
4113 Device_software_error_count (Código 60xxH) VAR Unsigned8
4114 Communication_error_count (Código 81xxH) VAR Unsigned8
4115 Protocol_error_count (Código 82xxH) VAR Unsigned8
4116 External_error_count (Código 90xxH) VAR Unsigned8
4117 Device_specific (Código FFxxH) VAR Unsigned8
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4118 Historial de emergencia MATRIZ
0 Número de entradas Unsigned8
1 Historial de emergencia del número de asiento 1 Domain
...
127 Historial de emergencia del número de asiento 127
Domain
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4200 Imagen de proceso de entrada
REGISTRO
0 Número de entradas Unsigned8
1 Longitud en bytes actual Unsigned16 Acceso de sólo lecturaActualizada por el administrador maestro
35013947 04/2009 307
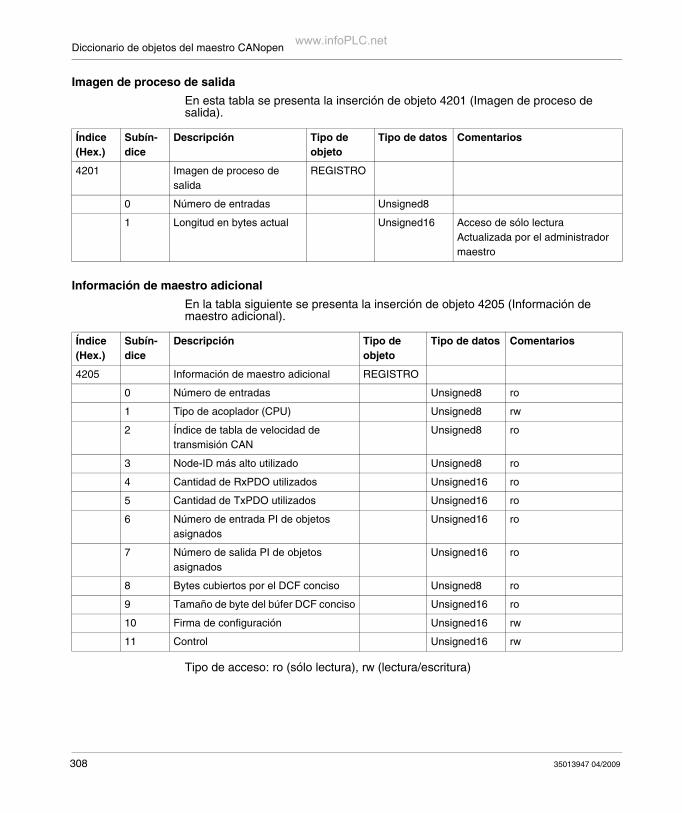
Diccionario de objetos del maestro CANopenwww.infoPLC.net
Imagen de proceso de salida
En esta tabla se presenta la inserción de objeto 4201 (Imagen de proceso de salida).
Información de maestro adicional
En la tabla siguiente se presenta la inserción de objeto 4205 (Información de maestro adicional).
Tipo de acceso: ro (sólo lectura), rw (lectura/escritura)
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4201 Imagen de proceso de salida
REGISTRO
0 Número de entradas Unsigned8
1 Longitud en bytes actual Unsigned16 Acceso de sólo lecturaActualizada por el administrador maestro
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4205 Información de maestro adicional REGISTRO
0 Número de entradas Unsigned8 ro
1 Tipo de acoplador (CPU) Unsigned8 rw
2 Índice de tabla de velocidad de transmisión CAN
Unsigned8 ro
3 Node-ID más alto utilizado Unsigned8 ro
4 Cantidad de RxPDO utilizados Unsigned16 ro
5 Cantidad de TxPDO utilizados Unsigned16 ro
6 Número de entrada PI de objetos asignados
Unsigned16 ro
7 Número de salida PI de objetos asignados
Unsigned16 ro
8 Bytes cubiertos por el DCF conciso Unsigned8 ro
9 Tamaño de byte del búfer DCF conciso Unsigned16 ro
10 Firma de configuración Unsigned16 rw
11 Control Unsigned16 rw
308 35013947 04/2009
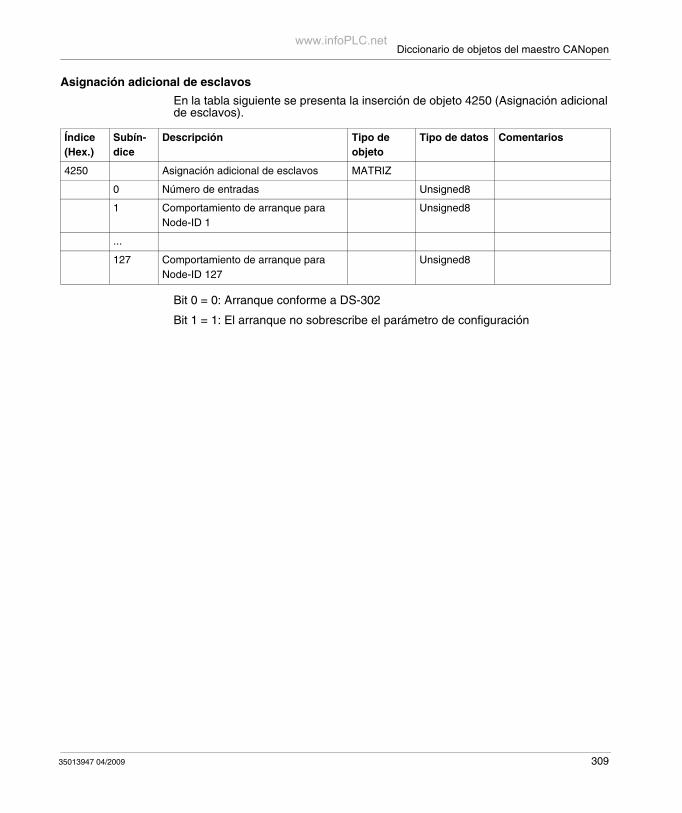
Diccionario de objetos del maestro CANopenwww.infoPLC.net
Asignación adicional de esclavos
En la tabla siguiente se presenta la inserción de objeto 4250 (Asignación adicional de esclavos).
Bit 0 = 0: Arranque conforme a DS-302
Bit 1 = 1: El arranque no sobrescribe el parámetro de configuración
Índice (Hex.)
Subín-dice
Descripción Tipo de objeto
Tipo de datos Comentarios
4250 Asignación adicional de esclavos MATRIZ
0 Número de entradas Unsigned8
1 Comportamiento de arranque para Node-ID 1
Unsigned8
...
127 Comportamiento de arranque para Node-ID 127
Unsigned8
35013947 04/2009 309

Diccionario de objetos del maestro CANopen
310 35013947 04/2009
www.infoPLC.net
35013947 04/2009
B
Relación entre PDO y variables STB
35013947 04/2009
www.infoPLC.net
Relación entre PDO y variables STB
Configuración de isla STB
Presentación
Las islas STB pueden configurarse:
Mediante el software de configuración Advantys (STB NCO 2212) Mediante el software Unity Pro (STB NCO 2212 y NCO 1010)
Configuración mediante la isla de configuración Advantys
El procedimiento para configurar una isla STB mediante el software de configuración Advantys es el siguiente. Sólo concierne al módulo STB NCO 2212:
Paso Acción
1 En el software de configuración Advantys (versión 2.2.0.2 o superior), crear una isla nueva.
2 Seleccionar el módulo de interfase de red STBNCO2212.
3 Seleccionar los módulos que se utilizarán en la aplicación.
311
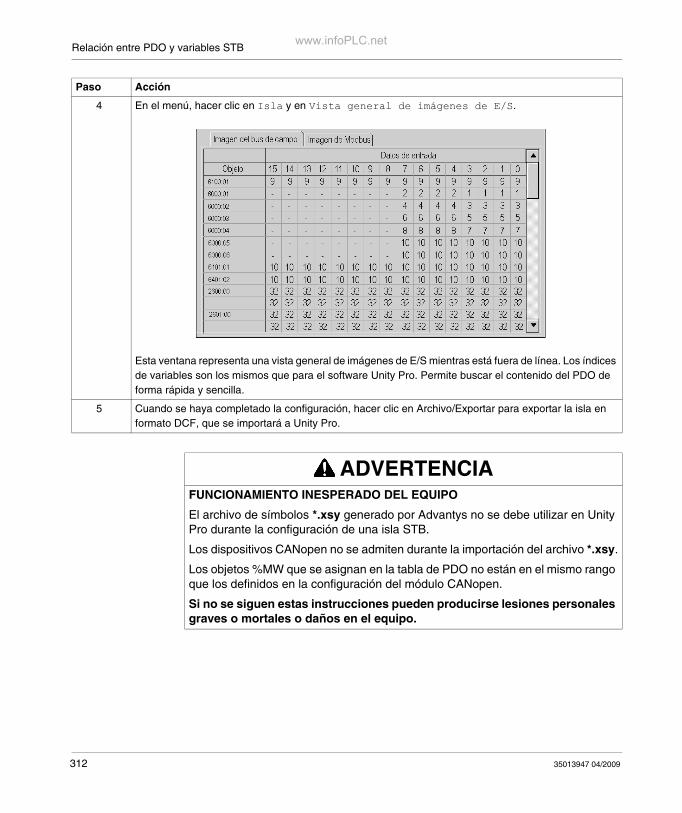
Relación entre PDO y variables STBwww.infoPLC.net
4 En el menú, hacer clic en Isla y en Vista general de imágenes de E/S.
Esta ventana representa una vista general de imágenes de E/S mientras está fuera de línea. Los índices de variables son los mismos que para el software Unity Pro. Permite buscar el contenido del PDO de forma rápida y sencilla.
5 Cuando se haya completado la configuración, hacer clic en Archivo/Exportar para exportar la isla en formato DCF, que se importará a Unity Pro.
Paso Acción
ADVERTENCIAFUNCIONAMIENTO INESPERADO DEL EQUIPO
El archivo de símbolos *.xsy generado por Advantys no se debe utilizar en Unity Pro durante la configuración de una isla STB.
Los dispositivos CANopen no se admiten durante la importación del archivo *.xsy.
Los objetos %MW que se asignan en la tabla de PDO no están en el mismo rango que los definidos en la configuración del módulo CANopen.
Si no se siguen estas instrucciones pueden producirse lesiones personales graves o mortales o daños en el equipo.
312 35013947 04/2009
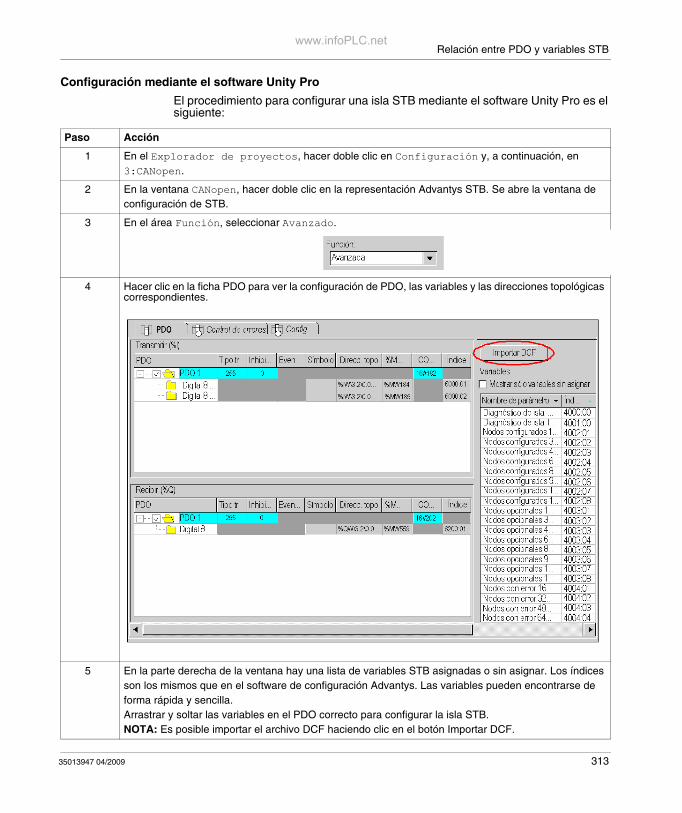
Relación entre PDO y variables STBwww.infoPLC.net
Configuración mediante el software Unity Pro
El procedimiento para configurar una isla STB mediante el software Unity Pro es el siguiente:
Paso Acción
1 En el Explorador de proyectos, hacer doble clic en Configuración y, a continuación, en 3:CANopen.
2 En la ventana CANopen, hacer doble clic en la representación Advantys STB. Se abre la ventana de configuración de STB.
3 En el área Función, seleccionar Avanzado.
4 Hacer clic en la ficha PDO para ver la configuración de PDO, las variables y las direcciones topológicas correspondientes.
5 En la parte derecha de la ventana hay una lista de variables STB asignadas o sin asignar. Los índices son los mismos que en el software de configuración Advantys. Las variables pueden encontrarse de forma rápida y sencilla.Arrastrar y soltar las variables en el PDO correcto para configurar la isla STB.NOTA: Es posible importar el archivo DCF haciendo clic en el botón Importar DCF.
35013947 04/2009 313

Relación entre PDO y variables STB
314 35013947 04/2009
www.infoPLC.net
35013947 04/2009
C
Acciones y transiciones
35013947 04/2009
www.infoPLC.net
Acciones y transiciones
Objeto
Este capítulo contiene las acciones y transiciones utilizadas en el Grafcet (consulte Creación del programa en SFC para la gestión de la secuencia de desplazamiento, página 270).
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Transiciones 316
Acciones 317
315
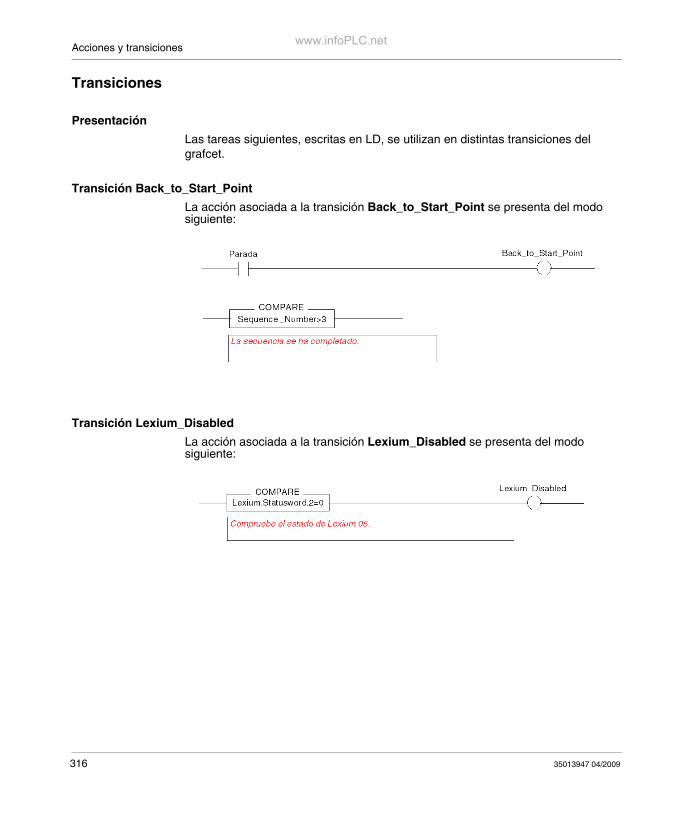
Acciones y transicioneswww.infoPLC.net
Transiciones
Presentación
Las tareas siguientes, escritas en LD, se utilizan en distintas transiciones del grafcet.
Transición Back_to_Start_Point
La acción asociada a la transición Back_to_Start_Point se presenta del modo siguiente:
Transición Lexium_Disabled
La acción asociada a la transición Lexium_Disabled se presenta del modo siguiente:
316 35013947 04/2009
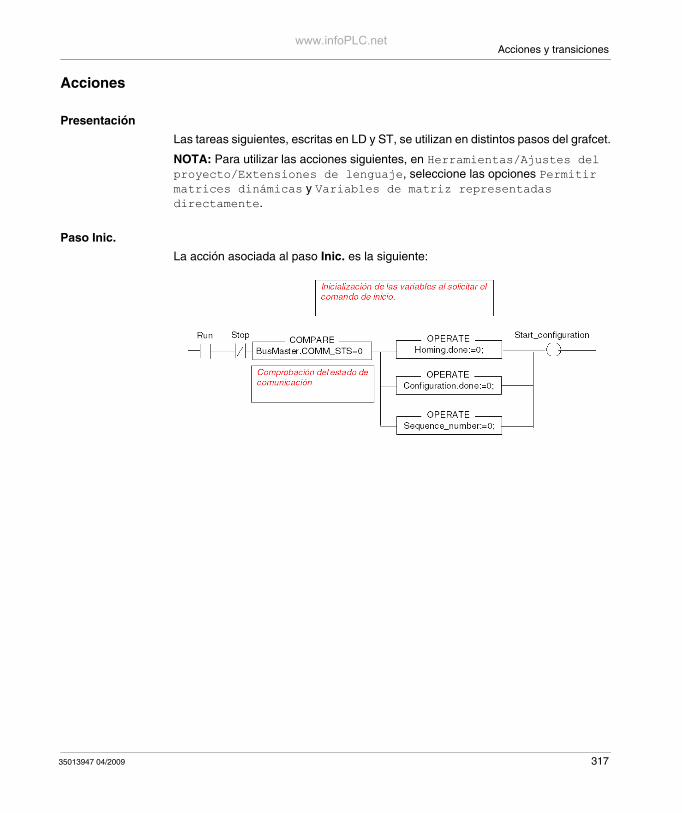
Acciones y transicioneswww.infoPLC.net
Acciones
Presentación
Las tareas siguientes, escritas en LD y ST, se utilizan en distintos pasos del grafcet.
NOTA: Para utilizar las acciones siguientes, en Herramientas/Ajustes del proyecto/Extensiones de lenguaje, seleccione las opciones Permitir matrices dinámicas y Variables de matriz representadas directamente.
Paso Inic.
La acción asociada al paso Inic. es la siguiente:
35013947 04/2009 317
Acciones y transicioneswww.infoPLC.net
Paso Move_to_Next_Position
Dos acciones están asociadas al paso Move_to_Next_Position.
La primera acción es la siguiente:
(* Definition of the target position*)
CASE Sequence_number OF
1: Lexium.Target_Position:=Position_B;
2: Lexium.Target_Position:=Position_A;
3: Lexium.Target_Position:=Position_C;
END_CASE;
IF (Sequence_number<4) AND NOT (Stop) THEN
(* Start the new positionning *)
New_SetPoint:=1;
Ready_for_Stop:=0;
END IF;
La segunda acción es la siguiente:
(*Incrementation before new move starts*)
INC(Sequence_Number);
NOTA: Para la acción de incremento, el descriptor debe estar colocado en P (flanco ascendente).
Paso Return_to_Start_Point
La acción asociada al paso Return_to_Start_Point es la siguiente:
(*Target Position Loading*)
Lexium.Target_Position:=0;
(*Start a new positioning*)
New_Setpoint:=1;
Disable_Lexium
La acción asociada al paso Disable_Lexium es la siguiente:
(*Lexium voltage disabling*)
Lexium.Controlword:=Lexium_disabling;
318 35013947 04/2009
Glosario
35013947 04/2009
www.infoPLC.net
Glosario
A
ADVANTYSHerramienta de configuración de Schneider CANopen para islas de PLC.
AsignaciónTransformación de datos consignados en un formato especial diferente.
B
BOOL Booleano.
C
CANController Area Network, Red de área de controlador: bus de campo desarrollado inicialmente para aplicaciones de automoción y que en la actualidad se emplea en una amplia variedad de sectores.
CiACAN in Automation: organización internacional de usuarios y fabricantes de dispositivos CAN.
35013947 04/2009 319
Glosariowww.infoPLC.net
COBCommunication Object, Objeto de comunicación: unidad de transporte en un bus CANopen. Un COB se identifica por medio de un identificador exclusivo, que está codificado en 11 bits, [0, 2.047]. Además, un COB contiene un máximo de ocho bytes de datos. La prioridad de transmisión de un COB viene determinada por su identificador. Cuanto más bajo sea el identificador, más alta es la prioridad del COB asociado.
CSDOCliente SDO
D
DINTDouble integer, Entero doble: Palabra de 32 bits.
DSDraft Standard, Proyecto de norma: documento de especificaciones creado por la organización CIA.
E
EBOOLBooleano con opciones de forzado y detección de flancos.
EDMMulti-language Electronic Data Sheet, Hoja de datos electrónica multilingüe: versión extendida del fichero EDS. Las extensiones incluyen un soporte multilingüe europeo, así como una descripción de las características físicas de un dispositivo.
EDSElectronic Data Sheet, Hoja de datos electrónica: descripción de un perfil de dispositivo CANopen normalizado por la especificación DSP306 CiA.
320 35013947 04/2009
Glosariowww.infoPLC.net
EMCYEmergency, Emergencia: evento de desencadenamiento, generado por un error/fallo interno. Este objeto se transmite con cada nuevo error, ya que los códigos de error son mecanismos independientes.
ESTADOBit desde 1: la modalidad funciona correctamente.
Bit desde 0:
configuración no válida, o módulo configurado pero ausente, o módulo ya configurado, pero con la misma dirección que un módulo existente, o no hay comunicación.
ETSEmpty Terminal Support, Apoyo de terminal vacío: la información adicional se almacena en la aplicación de PLC para su carga.
I
ID de COBIdentificador de COB: identificador exclusivo de un COB en una red CANopen. El identificador determina la prioridad de un COB.
IMAGEN DEL PROCESOParte de la memoria del sistema en la que se almacenan los valores de E/S de los intercambios PDO del bus CANopen. La pila CANopen es la encargada de gestionar esta sección.
Las entradas se copian en la memoria de la aplicación de usuario al inicio de cada ciclo de tarea, mientras que las salidas se copian al final de dicho ciclo.
INTInteger, Número entero: palabra de 16 bits de valor entero.
IODDTInput/Output Derived Data Type, Tipo de datos derivados de entrada/salida.
35013947 04/2009 321
Glosariowww.infoPLC.net
M
Módulo binarioTout Ou Rien, Todo o nada.
N
NIMNetwork Interface Module, Módulo de interfaz de red: comunicación entre el dispositivo y el bus de campo.
NMTNetwork Management, Gestión de red: es el responsable de la gestión de los procesos de ejecución, configuración y errores en una red CAN.
P
PDOProcess Data Object, Objeto de datos de proceso: el objeto para el intercambio de datos entre distintos elementos es CANopen.
R
REALNúmero real.
RPDOPDO recibido.
S
SDOService Data Object, Objeto de datos de servicio: comunicación entre pares con acceso al objeto de diccionario de un elemento de bus CANopen.
322 35013947 04/2009
Glosariowww.infoPLC.net
SSDOServidor SDO.
STBSmall Terminal Block, Bloque de terminales pequeño.
SYNCObjeto de sincronización.
T
TPDOTransmisión de PDO.
U
UDINTUnsigned double integer, Entero doble sin signo: entero doble sin signo.
UINTUnsigned integer, Entero sin signo: Entero sin signo.
35013947 04/2009 323

Glosario
324 35013947 04/2009
www.infoPLC.net
Índice
35013947 04/2009
www.infoPLC.net
CBA
ÍndiceAasignación de PDO, 167
BBMXP342010, 13BMXP342030, 13
Ccanal, estructura de datos para los protoco-los de comunicación
T_COM_STS_GEN, 200canal, estructura de datos para los protoco-los de comunicación
T_COM_CO_BMX, 210CANopen
conectores, 17COB-ID, 240configurar, 49
pasos de la configuración, 41configurar dispositivos
STB, 82Tesys U, 82
configurar servounidadesATV31, 82ATV61, 82ATV71, 82IcIA, 82Lexium 05, 82
35013947 04/2009
Ddepurar, 179diagnóstico, 18, 189direccionamiento
topológico, 164dispositivos, 21
Eerror, códigos, 240error, control
heartbeat, 66, 72vigilancia de nodo, 66, 72
evento, temporizador, 164
Iinhibición, tiempo, 164
MM340
Endurecido, 16reforzado, 16
NNMT (administración de redes), 66, 72
325
Indexwww.infoPLC.net
Oobjetos de emergencia (EMCY), 240objetos, diccionario, 295
Pparámetros, configuración, 200PDO, 164programar, 163
Rrápido, inicio, 245READ_VAR, 172rendimiento, 42
SSDO, 169
TT_COM_CO_BMX, 210T_COM_STS_GEN, 200transmisión, tipo, 164
WWRITE_VAR, 172
326
35013947 04/2009