buku a5 erma
DESCRIPTION
studyTRANSCRIPT
TUGAS AKHIR PENGENDALIAN OPTIMAL PADA PENANGANAN TUBERKULOSIS DUA STRAIN Oleh : Erma Wahyuni NRP. 1205 100 012 Dosen Pembimbing : 1. Dra. Mardlijah, MT 2. Drs. Lukman Hanafi, M.Si JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA 2009

iv
Pengendalian Optimal Pada Penanganan Tuberkulosis Dua
Strain
Nama : ERMA WAHYUNI NRP : 1205 100 012 Jurusan : Matematika ITS Pembimbing : 1. Dra. Mardlijah, MT 2. Drs. Lukman Hanafi, MSc Abstrak
Pengendalian tuberkulosis (TB) dua strain merupakan salah satu aplikasi dari teori pengendalian optimal. Tujuan dari pengendalian ini adalah mengurangi jumlah grup tuberkulosis yang kebal / tahan terhadap obat. Salah satu penanganan yang dapat dilakukan agar jumlah grup strain tersebut berkurang adalah dengan menggunakan kemoterapi. Namun penderita tuberkulosis merasa hal ini cukup memakan waktu dan biaya tinggi. Pengurangan kasus TB yang sensitif pada obat-obatan bisa diperoleh dengan case holding, yang menunjuk pada aktivitas dan teknik yang dipakai untuk memastikan keteraturan pemakaian obat dengan waktu yang cukup agar bisa sembuh, atau dengan case finding, yang menunjuk pada identifikasi individu yang secara laten terinfeksi dengan TB sensitif yang beresiko tinggi mengembangkan penyakit dan yang mendapatkan kemajuan dengan adanya intervensi pencegahan. Pada Tugas Akhir ini akan dibahas penanganan tuberkulosis yang optimal pada model tersebut dengan kontrol yang digunakan adalah yang mewakili dua tipe penanganan (case finding dan case holding) dengan mempertimbangkan strategi kontrol optimal yang dipengaruhi waktu dan akan dipecahkan secara numerik dengan menggunakan skema Beda Hingga. Kata kunci : Tuberkulosis, Pengendalian Optimal, dan Beda
Hingga

v
Optimal Control of Treatment In A Two-Strain Tuberculosis Name : ERMA WAHYUNI NRP : 1205 100 012 Departement : Mathematics ITS Supervisor : 1. Dra. Mardlijah, MT 2. Drs. Lukman Hanafi, MSc abstract
A two-strain tuberculosis (TB) control is one from many optimal control theory applications.The purpose from this control is to reduce the number of tuberculosis groups which immune / endure the drugs.one treatment that can work to reduce the strain groups number is using chemotherapy.but the tuberculosis sufferer feel that this method is very time consuming and need an expensive cost. the reduce of TB cases that sensitive to a drugs can be acquired by a case holding, which is pointing to the activity and technique that is used to ensuring the regularity of the drug using in an exact time for recover, or by case finding, which pointing to an individual identification that latently infected with a sensitive TB which have a high risk developing the disease and which have the progression because of the preventing intervention. in this final project, we will discuss about tuberculosis treatment which is optimal for the model, and for the control, we used the one which representing two types of treatment (case holding and case finding) with considering the optimal control strategy which affected with the time and will resolved as a numeric using finite different scheme. keywords : Tuberculosis,optimal control, and finite different
vi
KATA PENGANTAR
Alhamdulillahirobbil’alamin, puji syukur kehadirat Allah SWT yang telah melimpahkan rahmatNya, sehingga penulis dapat menyelesaikan Tugas Akhir yang berjudul “Pengendalian Optimal Pada Penanganan Tuberkulosis Dua Strain” yang merupakan salah satu syarat kelulusan dalam menempuh program S1-jurusan Matematika FMIPA ITS Surabaya. Banyak pihak yang membantu penulis dalam menyelesaikan Tugas Akhir ini. Oleh karena itu, penulis mengucapkan banyak terima kasih kepada: 1. Bapak Prof. DR. Basuki Widodo, MSc selaku Ketua Jurusan
Matematika ITS. 2. Ibu Dra. Mardlijah, MT dan Bapak Drs. Lukman Hanafi, MSc
selaku dosen pembimbing yang telah meluangkan waktumya untuk memberi bimbingan dengan sabar.
3. Ibu Dra. Rinurwati, MSi selaku koordinator Tugas Akhir. 4. Drs. Chairil Imron, MIkom selaku Dosen Wali 5. Dosen Tim Penguji Tugas Akhir, Dr. Erna Apriliani, MSi dan
Drs. M. Setijo Winarko, MSi, yang telah memberikan pengarahan yang sangat berguna.
6. Bapak ibu dosen, serta staf Tata Usaha Jurusan Matematika ITS.
7. Keluarga tersayang yang telah memberikan dorongan moral, materi dan do’anya.
8. Mas Slamet Riyadi, mas Akhmad, mas Ade, mas Kodir dan teman-teman jurusan atas supportnya.
9. Teman-teman kos C9 yang selalu memberikan keceriaan. Penulis yakin bahwa penulisan laporan ini masih banyak kekurangan dan kesalahan, akan tetapi penulis sudah berusaha semaksimal mungkin dalam menyusun laporan ini. Oleh karena itu penulis meminta saran dan kritik dari pembaca laporan ini.
Surabaya, Februari 2009
Penulis
vii
DAFTAR ISI
Halaman
JUDUL
ABSTRAK………………… ………………………………….. iv
KATA PENGANTAR…………………………………..………vi
DAFTAR ISI…………………...……………………………....vii
DAFTAR LAMBANG………………………………………......x
DAFTAR GAMBAR…………………………………………....xi
DAFTAR TABEL………………………………………………xii
DAFTAR LAMPIRAN………………………………………...xiii
BAB I PENDAHULUAN.
1.1 Latar Belakang………………..……………………. 1
1.2 Rumusan Masalah……………………..…………….2
1.3 Tujuan Penelitian…………….………………….......5
1.4 Manfaat Penelitian…………………………………..5
1.5 Batasan Masalah…………………………………….5
1.6 Sistematika Penulisan……………………………….6
BAB II TINJAUAN PUSTAKA
2.1 Model TB Dua Strain……………………..................7
2.2 Teori Dasar Pendukung Penyelesaian Permasalahan
2.2.1 Himpunan Tertutup dan Himpunan Terbuka
di dalam ℜ
.....................................................10
2.2.2 Fungsi Terbatas……………………………...11
viii
2.2.3 Fungsi Lipschitz………………………….......11
2.2.4 Konveks………………………………….......12
2.2.5 Fungsi Konkav…………………………...….13
2.3 Model Sistem dan Performance Index
2.3.1 Model Sistem………………………………...14
2.3.2 Performance Index……………………….......21
2.4 Masalah Optimal Control………………………......23
2.5 Pontryagin Maximum Principle dengan Kontrol
Terbatas....................................................................24
2.6 Metode Beda Hingga………………………………29
BAB III METODE PENELITIAN
3.1 Studi Literatur……………………………………...35
3.2 Analisis Eksistensi Optimal Control…………….....35
3.3 Penyelesaian Optimal Control……………………..35
3.4 Analisis Ketunggalan Optimal Control……...…….36
3.5 Simulasi Numerik………………………………….36
3.6 Penarikan Kesimpulan……………………………..36
BAB IV PEMBAHASAN
4.1 Analisis Eksistensi optimal control……...............…37
4.2 Penyelesaian Optimal Control……………………..46
4.3 Analisis Ketunggalan optimal control……………..51
4.4 Simulasi Numerik………………………………….72
BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan……………………………………...…81
ix
5.2 Saran……………………………………………….82
DAFTAR PUSTAKA…………………………………………..83
LAMPIRAN……………………………………………………85
x
DAFTAR LAMBANG
Lambang Makna
∈ Elemen
∆ Sebanding
δ Variation
*x Solusi x yang optimal
*u Solusi u yang optimal
)(xVε Persekitaran-ε dari x
⊆ Himpunan Bagian
∉ Bukan elemen
∩ Irisan
u Vektor u
ℜ Himpunan bilangan real
xi
DAFTAR GAMBAR
Halaman
Gambar 2.1 Kompartemen……………………………….9
Gambar 2.2.4.1 Himpunan Convex…………….…...............12
Gambar 2.2.4.2 Himpunan Nonconvex…………..………....12
Gambar 2.4 Skema Kontrol…………………….…….….24
Gambar 4.1 Kontrol 1u dan 2u ………………….……....78
Gambar 4.2. Perbandingan Populasi Dengan Kontrol dan Tanpa Kontrol………….……………….……79
xii
DAFTAR TABEL Halaman Tabel 4.1 Parameter dan Nilai......................................77 Tabel 4.2 Parameter Komputasi...................................78
xiii
DAFTAR LAMPIRAN Halaman Lampiran 1 M-file..................................................................85 Lampiran 2 GUI.....................................................................88
BAB I PENDAHULUAN
1.1 Latar Belakang
Pada saat ini program kontrol Tubekulosis (TB) telah difokuskan pada kemoterapi karena kurangnya vaksin efektif. Penanganan antibiotik pada pasien TB aktif memerlukan waktu yang jauh lebih lama dan biaya yang lebih tinggi daripada pada mereka yang terinfeksi dengan TB sensitif tetapi belum berkembang menjadi penyakit. Kurangnya kesesuaian dalam penanganan tidak hanya mengakibatkan kekambuhan tetapi juga perkembangan TB yang kebal terhadap antibiotik. Pengurangan kasus TB yang sensitif pada obat-obatan bisa diperoleh dengan case holding, yang menunjuk pada aktivitas dan teknik yang dipakai untuk memastikan keteraturan pemakaian obat dengan waktu yang cukup agar bisa sembuh, atau dengan case finding, yang menunjuk pada identifikasi individu yang secara laten terinfeksi dengan TB sensitif yang beresiko tinggi mengembangkan penyakit dan yang mendapatkan kemajuan dengan adanya intervensi pencegahan. Penanganan pencegahan ini akan mengurangi insiden TB yang sensitif pada obat-obatan dan dengan demikian secara tidak langsung mengurangi insiden TB yang tahan pada obat-obatan.
Biaya dalam memfasilitasi case finding dan case holding berbeda-beda tergantung banyak faktor. Misalnya pada case holding bisa sangat menantang karena adanya fakta bahwa kemoterapi harus dilakukan selama beberapa bulan untuk memastikan adanya kesembuhan yang permanen, namun pasien biasanya sudah merasa sembuh hanya setelah beberapa pekan penanganan dan seringkali berhenti mengkonsumsi obat. Selain penanganan dengan menggunakan kemoterapi, terdapat juga di beberapa daerah yang menggunakan DOTS ( strategi terapi terobservasi langsung ) dimana perawat kesehatan masyarakat, sukarelawan, dan yang lainnya melakukan sebagian besar tanggung jawab untuk mengawasi pasien selama masa
penanganan melalui kunjungan ke rumah dan administrasi. Meskipun program ini memerlukan waktu penanganan yang relatif pendek, hanya sedikit pasien yang menggunakan program ini. Pada case finding, diutamakan pencegahan perkembangan penyakit dengan terapi pencegahan pada orang yang secara laten terinfeksi dengan TB sensitif. Terdapat beberapa metode case finding. Case finding aktif, yang menunjuk pada metode identifikasi kasus TB dimana kontak pasien/penyedia inisiatif pertama dilakukan oleh penyedia layanan kesehatan, sedangkan case finding pasif, yang menunjuk pada metode identifikasi kasus TB dimana kontak pasien/penyedia inisiatif pertama dilakukan oleh pasien.
Pada tugas akhir ini akan dibahas tentang strategi kontrol optimal yang dipengaruhi waktu dengan case holding dan case finding pada model TB dua strain yang dikembangkan didalamnya. Usaha case finding digabungkan dengan menambahkan syarat kontol yang mengidentifikasi dan menyembuhkan satu fraksi individu laten sehingga jumlah individu yang penyakitnya berkembang bisa berkurang. Usaha penanganan kasus digabungkan dengan menambahkan syarat kontrol yang bisa mengurangi jumlah kegagalan perawatan individu dengan TB sensitif aktif sehingga insiden adanya TB yang tahan pada obat-obatan bisa dikurangi.
1.2 Rumusan Masalah
Diberikan model TB dua strain sebagai berikut [Jung,2002]:
SNI
SNI
SS µββ −−−Λ= ∗ 211
&
NIL
NITIprtuLrtuLk
NISL 2
11
2122111111
11 ))(1()()( ∗−+−+−+−= ββµβ&
IrIdLkI 211111 )( −+−= µ& …(1.1)
NI
TLSLkIqrtuL 21221222 )()())(1( ++++−−= ∗βµ&

TNI
TNI
TIrqptuLrtuT
IdLkI
µββ
µ
−−−+−−+=
+−=
∗ 212122111
22222
))))((1(1()(
)(
&
&
Meminimalkan performance index berikut :
dttuB
tuB
tItLuuJft
])(2
)(2
)()([),(0
22
221
12221 ∫ +++= ...(1.2)
Atau bisa ditulis memaksimalkan
dttuBtuBtItLuuJft
])(2
)(2
)()([),(0
22
221
12221 ∫ +++−= . ...(1.3)
Dimana : S : populasi rentan terkena TB
1L : populasi laten yaitu populasi terinfeksi dengan TB strain 1, tetapi belum menularkan
I1 : populasi yang terinfeksi TB strain 1 L2 : populasi laten yaitu terinfeksi dengan TB strain 2 yang
tahan obat tetapi belum menularkan I2 : populasi yang terinfeksi TB strain 2 yang tahan pada
obat T : populasi yang dirawat (dengan efektif) N : S + L1 + I1 + L2 + I2 + T Λ : laju kelahiran dan imigrasi β1 : laju individu yang rentan tertular β2 : laju individu yang dirawat menjadi terinfeksi oleh
individu yang TB-nya menular β* : laju individu yang tidak terinfeksi menjadi terinfeksi
oleh satu TB tahan obat yang menular. µ : laju kematian alami per kapita. d1 : laju kematian per kapita yang disebabkan oleh penyakit
pada TB strain 1 d2 : laju kematian per kapita yang disebabkan oleh penyakit
pada TB strain 2 yang tahan obat. k1 : laju individu yang meninggalkan kasus TB strain 1 k2 : laju individu yang terjangkit TB strain 2
r1 : laju perawatan individu yang menderita TB strain 1 yang menular
r2 : laju perawatan individu yang menderita TB strain 2 yang menular
u1(t) : mewakili fraksi TB strain 1 pada individu yang teridentifikasi dan yang akan diberikan perawatan.
1-u2(t) : usaha yang mencegah kegagalan perawatan pada penderita TB strain 2 yang menular
p + q : proporsi mereka yang dirawat karena menderita TB tersebut dan tidak menyempurnakan perawatan (p + q ≤ 1).
B1 , B2 : faktor penyeimbang biaya. Dengan bentuk model pada Persamaan (1.1), (1.2) dan (1.3), permasalahan dalam tugas akhir ini terbagi atas dua yaitu:
1. Bagaimana menerapkan kontrol optimal pada permasalahan TB dua strain
2. Bagaimana perhitungan numerik Beda Hingga pada permasalahan TB dua strain
1.3 Tujuan Tujuan dari penulisan tugas akhir ini adalah untuk
mengoptimalkan penanganan TB agar mengurangi jumlah grup strain yang tahan pada obat.
1.4 Manfaat
Manfaat dari penulisan Tugas Akhir ini adalah memberi pengetahuan kepada pihak / badan kesehatan tentang cara penanganan TB dua strain yang optimal. 1.5 Batasan Masalah
Batasan yang digunakan dalam permasalahan di atas adalah sebagai berikut :
1. Kontrol yang dapat diterima (admissble control) disimbolkan dengan u dalam keadaan terbatas dan kontinu pada 2,1,10 =<≤≤≤ ibua iii .
2. State yang dipengaruhi oleh waktu )(t dalam keadaan kontinu.
3. Sistem dalam keadaan terkontrol dan lama perawatan pada interval waktu tertentu.
1.6 Sistematika Penulisan Sistematika dari penulisan Tugas Akhir ini adalah sebagai
berikut : BAB I PENDAHULUAN
Pada bab ini berisi tentang gambaran umum dari penulisan Tugas Akhir ini yang meliputi latar belakang masalah, perumusan masalah, batasan masalah, tujuan dan manfaat penelitian, dan sistematika penulisan.
BAB II TINJAUAN PUSTAKA
Pada bab ini berisi tentang materi-materi yang mendukung Tugas Akhir ini, antara lain Prinsip Maksimum Pontryagin dan Metode Beda Hingga.
BAB III METODOLOGI PENELITIAN
Pada bab ini akan dibahas tentang metode yang digunakan untuk menyelesaikan Tugas Akhir ini.
BAB IV PEMBAHASAN
Pada bab ini akan dibahas tentang pendiskritan model tuberkulosis, penerapan Prinsip Maksimum Pontryagin pada state, co-state, fungsional dan hamilton untuk mencari kontrol optimal dan mengaplikasikan metode Beda Hingga untuk mencari
simulasi numerik dari strategi penanganan tuberkulosis dua strain.
BAB V KESIMPULAN DAN SARAN
Bab ini berisi kesimpulan yang diperoleh dari pembahasan masalah sebelumnya serta saran yang diberikan untuk pengembangan selanjutnya.

BAB II TINJAUAN PUSTAKA
Pada bab ini, akan dijelaskan mengenai tinjauan model TB dua strain yang menjadi objek penelitian, model sistem (plant) dan performance index sebagai inspirasi dalam melakukan analisis optimal control. Tentunya, dibahas juga masalah optimal control dan metode penyelesaiannya (Pontryagin Maximum Principle) sebagai pembahasan utama dalam tugas akhir ini. Selain itu, akan dibahas tentang simulasi numerik dari permasalahan optimal pada beberapa skenario. Sebelum membahas mengenai tinjauan model sistem dan performance index, akan dibahas duhulu tinjauan tentang teori dasar yang mendukung pembahasan masalah meliputi: teori dasar yang berhubungan dengan pengendalian optimal pada penanganan TB dua strain. 2. 1 Model TB Dua Strain
Sistem TB dua strain adalah enam sistem persamaan diferensial biasa berikut [Jung, 2002] :
SNI
SNI
SS µββ −−−Λ= ∗ 211
&
NIL
NITIprtuLrtuLk
NISL 2
11
2122111111
11 ))(1()()( ∗−+−+−+−= ββµβ&
1211111 )( IrIdLkI −+−= µ&
NITLSLkIqrtuL 2
1221222 )()())(1( ++++−−= ∗βµ&
22222 )( IdLkI +−= µ&
TNIT
NITIrqptuLrtuT µββ −−−+−−+= ∗ 21
2122111 ))))((1(1()(&
Dimana : S : populasi rentan terkena TB
1L : populasi laten yaitu populasi terinfeksi dengan TB strain 1, tetapi belum menularkan
I1 : populasi yang terinfeksi TB strain 1 L2 : populasi laten yaitu terinfeksi dengan TB strain 2 yang
tahan obat tetapi belum menularkan I2 : populasi yang terinfeksi TB strain 2 yang tahan pada
obat T : populasi yang dirawat (dengan efektif) N : S + L1 + I1 + L2 + I2 + T Λ : laju kelahiran dan imigrasi β1 : laju individu yang rentan tertular β2 : laju individu yang dirawat menjadi terinfeksi oleh
individu yang TB-nya menular β* : laju individu yang tidak terinfeksi menjadi terinfeksi
oleh satu TB tahan obat yang menular. µ : laju kematian alami per kapita. d1 : laju kematian per kapita yang disebabkan oleh penyakit
pada TB strain 1 d2 : laju kematian per kapita yang disebabkan oleh penyakit
pada TB strain 2 yang tahan obat. k1 : laju individu yang meninggalkan kasus TB strain 1 k2 : laju individu yang terjangkit TB strain 2 r1 : laju perawatan individu yang menderita TB strain 1
yang menular r2 : laju perawatan individu yang menderita TB strain 2
yang menular u1(t) : mewakili fraksi TB strain 1 pada individu yang
teridentifikasi dan yang akan diberikan perawatan. 1-u2(t) : usaha yang mencegah kegagalan perawatan pada
penderita TB strain 2 yang menular p + q : proporsi mereka yang dirawat karena menderita TB
tersebut dan tidak menyempurnakan perawatan (p + q ≤ 1).
B1 , B2 : faktor penyeimbang biaya.
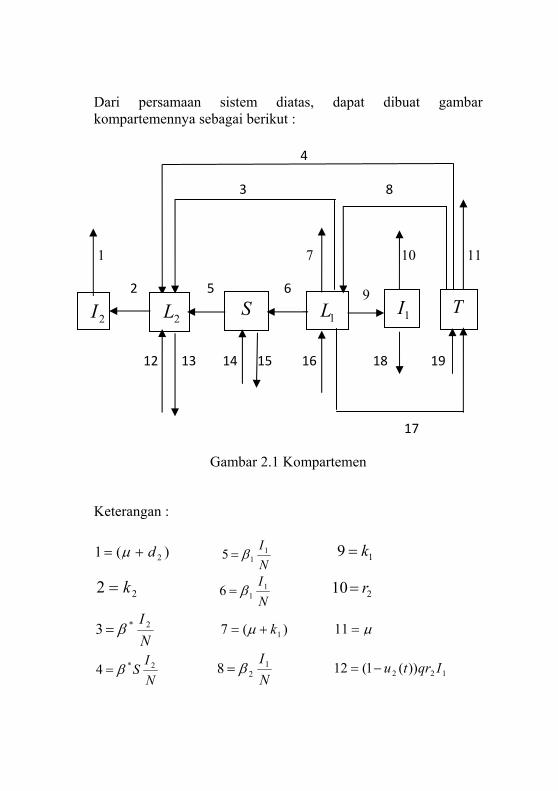
Dari persamaan sistem diatas, dapat dibuat gambar kompartemennya sebagai berikut : 4
3 8
1 7 10 11
2 5 6 9 11
12 13 14 15 16 18 19
17
Gambar 2.1 Kompartemen
Keterangan :
)(1 2d+= µ NI1
15 β=
19 k=
22 k= NI1
16 β=
210 r=
NI 2*3 β=
)(7 1k+= µ µ=11
NI
S 2*4 β= N
I128 β=
122 ))(1(12 Iqrtu−=
1L S 1I2L2I T
)(13 2k+= µ 11 )(17 rtu=
Λ=14 )(18 2d+= µ µ=15
122 ))))((1(1(19 Irqptu +−−=
122 ))(1(16 Iprtu−=
2.2 Teori Dasar Pendukung Penyelesaian Permasalahan
Pada bagian ini, dijelaskan mengenai teori-teori pendukung yang berhubungan dengan identifikasi terhadap eksistensi dan ketunggalan optimal control. Teori-teorinya yaitu himpunan tertutup dan himpunan terbuka di dalam ℜ , fungsi terbatas, fungsi Lipschitz, konveks, dan fungsi konkav.
2.2.1 Himpunan Tertutup dan Himpunan Terbuka di dalam ℜ Definisi 2.2.1.1 (Bartle, 1994) Persekitaran titik ℜ∈x adalah sebarang himpunan V yang memuat persekitaran-ε dari x ,
{ }εε <−=ℜ∈= yxyxdyxV ),(:)( untuk suatu 0>ε Definisi 2.2.1.2 (Bartle, 1994) 1. ℜ⊆G dikatakan terbuka dalam ℜ , jika untuk setiap
Gx∈ , terdapat persekitaran V dari x sehingga GV ⊆ . Jadi, untuk menunjukkan himpunan ℜ⊆G terbuka, cukup ditunjukkan bahwa setiap titik di dalam G mempunyai suatu persekitaran-ε yang masih termuat di dalam G , atau
ℜ⊆G terbuka jika dan hanya jika untuk setiap Gx∈ terdapat 0>xε sehingga GxV ⊆)(ε .
2. ℜ⊆F dikatakan tertutup dalam ℜ , jika komplemen dari F , FF C \ℜ= terbuka di dalam ℜ . Jadi, untuk menunjukkan ℜ⊆F tertutup, cukup ditunjukkan bahwa setiap titik di dalam CF (artinya Fy ∉ ),
terdapat persekitaran-ε dari y sehingga FyV \)( ℜ⊆ε , atau ℜ⊆F tertutup jika dan hanya jika untuk setiap Fy ∈terdapat 0>yε sehingga φε =∩ )( yVF
Contoh 2.2.1.1 ]1,0[:=G tetutup sebab sebarang titik Gy∉ , maka 0<y atau
1>y . Jika 0<y , ambil yy =ε , maka φε =∩ )(yVG . Jika
1>y , ambil 1−= yyε , maka φε =∩ )(yVG . 2.2.2 Fungsi terbatas Definisi 2.2.2.1 (Bartle, 1994) Misalkan, ℜ⊆A dan ℜ→Af : dikatakan terbatas pada A jika terdapat bilangan positif M , sedemikian hingga berlaku
Mxf ≤)( , untuk semua Ax∈ Contoh 2.2.2.1 Fungsi trigonometri xxf sin)( = pada ]2,0[ π=A , f terbatas sebab terdapat suatu bilangan positif yaitu 1=M sedemikian hingga 1sin)( ≤= xxf , untuk semua Ax∈ . 2.2.3 Fungsi Lipschitz Definisi 2.2.3.1 (Bartle, 1994)
Misalkan, ℜ⊆A dan ℜ→Af : jika terdapat bilangan postif L sedemikian hingga
uxLufxf −≤− )()( untuk setiap Aux ∈, , maka f dikatakan fungsi Lipschitz (memenuhi kondisi Lipschitz) pada A . Contoh 2.2.3.1 Fungsi 2)( xxf = pada ],0[ bA = , 0>b , f memenuhi kondisi Lipschitz sebab

22)()( uxufxf −=−
))(( uxux −+=
uxux −+= uxb −≤ 2 untuk setiap Aux ∈, Dengan mengambil bL 2= , maka uxLufxf −=− )()( . 2.2.4 Konveks Definisi 2.2.4.1 (Boyd, 2003) Himpunan nC ℜ⊂ dikatakan konveks, jika setiap
Cyx ∈, maka yxz )1( εε −+= , untuk setiap ]1,0[∈ε adalah anggota C . Secara geometri, C konveks untuk semua titik pada segmen garis yang terhubung dengan dua titik pada C harus terletak pada C . Berikut ini, disajikan contoh gambar himpunan konveks dan himpunan non-konveks
Gambar 2.2.4.1
Himpunan konveks Gambar 2.2.4.2
Himpunan non-konveks Gambar 2.2.4.1 menunjukkan contoh himpunan konveks. Terlihat bahwa, segmen garis yang menghubungkan x dan y berada pada C . Sedangkan, Gambar 2.2.4.2 menunjukkan contoh himpunan
non-konveks. Terlihat bahwa, tidak semua titik pada segmen garis yang menghubungkan x dan y berada pada D . Contoh 2.2.4.1 Himpunan { }0,0; 21
2 ≥≥ℜ∈= xxxC adalah konveks Bukti: Ambil sebarang 2, ℜ∈yx maka ( )21, xxx = dengan
0,0 21 ≥≥ xx dan ( )21, yyy = dengan 0,0 21 ≥≥ yy , sedemikian hingga
yxz )1( εε −+= , untuk sebarang 10 ≤≤ ε
( ) ( )
( ) ( )( )2211
2121
2121
)1(,)1()1(,)1(,
,)1(,
yxyxyyxx
yyxx
εεεεεεεε
εε
−+−+=−−+=
−+=
Padahal 0,0,0,0)1(,0 121 ≥≥≥≥−≥ yxxεε dan 02 ≥y yang mengakibatkan 0)1(,0)1( 2211 ≥−+≥−+ yxyx εεεε . Oleh karena itu, 2ℜ∈z berarti himpunan C adalah konveks. 2.2.5 Fungsi Konkav Definisi 2.2.5.1 (Boyd, 2003)
Fungsi )(xf dikatakan konkav pada interval bxa ≤≤ , jika untuk semua 10 ≤≤ ε dan bxxa ≤≤≤ 21 berlaku
))1(()()1()( 2121 xxfxfxf εεεε −+≤−+ Contoh 2.2.5.1 Fungsi 2)( xxf −= konkav pada ℜ Bukti: Ambil sebarang ℜ∈21, xx dengan 21 xx ≤ dan 10 ≤≤ ε akan dibuktikan bahwa ))1(()()1()( 2121 xxfxfxf εεεε −+≤−+ .
Untuk 22
2121 )1()()1()( xxxfxf εεεε −−−=−+
22
22
21 xxx −+−= εε

Untuk ( )22121 )1())1(( xxxxf εεεε −+−=−+
22
222
2221
21
2 2)1(2 xxxxxx εεεεε −+−−−−= Berarti akan ditunjukkan bahwa
22
222
2221
21
222
22
21 2)1(2 xxxxxxxxx εεεεεεε −+−−−−≤−+−
atau 0)1(2 2
222
2212
122
1 ≤+−−++− xxxxxx εεεεεε ...(2.6) Dilain pihak
22
22221
21
221 )1(2 xxxxxx εεεεεε +−−++− ( )2
222
2212
122
1 )1(2 xxxxxx εεεεεε −+−−−−=
( )221 )1()1( εεεε −−−−= xx
Karena ( ) 0)1()1(2
21 ≥−−− εεεε xx , maka Persamaan (2.6) dapat terpenuhi. 2.3 Model Sistem dan Performance Index Pada bagian ini, akan dibahas mengenai model sistem (dalam hal ini adalah plant), dan performance index secara umum dengan tujuan agar dapat dipahami keterkaitannya. 2.3.1 Model Sistem Sistem adalah bagian dari realita. Realita di sekitar sistem dinamakan “sekitar sistem”. Interaksi di antara sistem dan di sekitar sistem direalisasikan lewat besaran, sangat sering merupakan fungsi dari waktu yang dinamakan masukan (input) dan keluaran (output). Sistem dipengaruhi sekitar melalui masukan dan sistem mempunyai pengaruh pada sekitar melalui keluaran. Penekanan dari makna sistem yang dikaji adalah prilaku dinamik dari fenomena, yaitu bagaimana karakteristik keadaan mendatang (seperti masukan dan keluaran) berubah sesuai dengan berubahnya waktu dan apa hubungannya yang juga sebagai fungsi

waktu (Oldser, 1994). Sistem biasanya disajikan dalam bentuk persamaan differensial linear maupun taklinear. Untuk persamaan differensial taklinear sering kali muncul pada terapan ilmu fisika, biologi maupun lainnya dalam bentuk model matematika. Pada umumnya, penyelesaian sistem taklinear sangat sulit, sehingga penelitian seringkali ditujukkan pada sifat-sifat penyelesaian. Berikut ini, akan dipahami mengenai eksistensi dan ketunggalan solusi persamaan differensial taklinear yang menjadi pola dasar berfikir untuk melakukan analisis ketunggalan optimal control pada permasalahan yang dibahas dalam tugas akhir ini. Diberikan suatu persamaan differensial taklinear
))(()( txftx =& ; 00 )( xtx = , [ ]10 , ttt ∈ ...(2.7) Dengan asumsi: i. )(xf fungsi kontinu pada x untuk setiap nx ℜ∈ ii. )(xf fungsi terbatas maka terdapat bilangan positif M
sedemikian hingga untuk semua nilai x berlaku Mxf ≤)(
iii. )(xf memenuhi kondisi Lipschitz maka terdapat bilangan postif L sedemikian hingga untuk nxx ℜ∈21 , berlaku
2121 )()( xxLxfxf −≤− Maka untuk mencari eksistensi dari solusi persamaan differensial adalah sebagai berikut :
Persamaan (2.7) kedua ruas diintegralkan dari 0t sampai t
∫ ∫=t
t
t
t
dtfdx0 0
))(()( ττττ&
atau
∫+=t
t
dxfxtx0
))(()( 0 ττ
Ditentukan eksistensi fungsi )(tφ sehingga

∫+=t
t
dfxt0
))(()( 0 ττφφ
Misalkan, didefinisikan barisan fungsi ),...(),( 10 tt φφ sedemikian hingga
⎪⎪⎪⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪⎪⎪⎪
⎬
⎫
+∆
+∆
+∆
∆
∫
∫
∫
+
t
tjij
t
t
t
t
dfx
dfxt
dfxt
xt
0
0
0
))((
.
.
.
,))(()(
,))(()(
,)(
0
102
001
00
ττφφ
ττφφ
ττφφ
φ
...(2.8)
Akan ditunjukkan )(lim tjjφ
∞→ ada dan dengan limit fungsinya
adalah )(tφ . Padahal )(tjφ dapat dituliskan sebagi berikut:
)()()(...)()()()()( 111100 tttttttt jjjj φφφφφφφφ +−++−+−= −−
atau
[ ]∑−
=+ −+=
1
010 )()()()(
j
iiij tttt φφφφ
Jadi, jika )(tjφ konvergen maka akan ditunjukkan

[ ]∑−
=+∞→
−1
01 )()(lim
j
iiij
tt φφ konvergen. Dengan menggunakan
Persamaan (2.8) dapat diperoleh
∫=−t
t
dftt0
))(()()( 001 ττφφφ
Oleh karena itu,
∫=−t
t
dftt0
))(()()( 001 ττφφφ ∫≤t
t
df0
))(( 0 ττφ
Padahal f fungsi terbatas maka
∫≤−t
t
Mdtt0
)()( 01 τφφ )( 0ttM −≤
Dengan cara yang sama
( )∫ −=−t
t
dfftt0
))(())(()()( 1212 ττφτφφφ
Diperoleh
( )∫ −=−t
t
dfftt0
))(())(()()( 0112 ττφτφφφ
∫ −≤t
t
dff0
))(())(( 01 ττφτφ
Karena f memenuhi kondisi Lipschitz maka
∫ −=−t
t
dLtt0
)()()()( 0112 ττφτφφφ ∫ −≤t
t
dtLM0
)( 0 ττ
20 )(
!21 ttLM −≤
Secara umum, dapat dituliskan jj
jj ttMLj
tt )(!
1)()( 01
1 −≤− −−φφ
atau jj
jj ttLjL
Mtt )(!
1)()( 01 −≤− −φφ
sehingga 1
01
1 )()!1(
1)()( +++ −
+≤− jj
jj ttLjL
Mtt φφ
Jika kedua ruas dilakukan penjumlahan dari 0 hingga j dan kemudian dilimitkan ∞→j maka diperoleh
∑∑−
=
++
∞→
−
=+∞→
−+
≤−1
0
10
11
01 )(
)!1(1lim)()(lim
j
i
ii
j
j
iiij
ttLiL
Mtt φφ
Mengingat bahwa 1)()!1(
1lim )(1
0
10
1 0 −=−+
−−
=
++
∞→ ∑ ttLj
i
ii
jettL
i,
berarti persamaan ruas kanan konvergen seragam untuk semua
nilai 0tt − , dengan kata lain [ ]∑−
=+∞→
−1
01 )()(lim
j
iiij
tt φφ konvergen
seragam. Jadi, fungsi )(tjφ konvergen seragam pada )(tφ pada
interval waktu 0tt − sehingga pada Persamaan (2.8) dapat diperoleh
⎟⎟⎠
⎞⎜⎜⎝
⎛+= ∫∞→+∞→
t
tjjjj
tfxt0
))((lim)(lim 01 φφ
Oleh karena itu,
∫+=t
t
dfxt0
))(()( 0 ττφφ
Dan untuk mencari ketunggalan solusi dari persamaan differensial adalah sebagai berikut : Misalkan, )(tφ merupakan penyelesaian dari Persamaan (2.8). Untuk menganalisis ketunggalan dari penyelesaian tersebut, dengan kontradiksi misalkan penyelesaian yang lain yaitu )(tψ .
Karena )(tψ merupakan penyelesaian sehingga
ττψψ dfxtt
t∫+=0
)(()( 0 ...(2.9)
Dari Persamaan (2.8) dan (2.9) didapatkan
∫=−t
t
dftt0
))(()()( 0 ττψφψ
atau
∫=−t
t
dftt0
))(()()( 0 ττψφψ
sehingga dapat dituliskan sebagai
ττψφψ dfttt
t∫≤−0
)(()()( 0
Karena f fungsi terbatas maka
∫≤−t
t
Mdtt0
)()( 0 τφψ )( 0ttM −≤
Dengan cara yang sama
( )∫ −=−t
t
dfftt0
))(())(()()( 1 ττφτψφψ
Diperoleh
( )∫ −=−t
t
dfftt0
))(())(()()( 01 ττφτψφψ
atau
∫ −≤−t
t
dfftt0
))(())(()()( 01 ττφτψφψ
Karena f memenuhi kondisi Lipschitz, maka
∫∫ −≤−=−t
t
t
t
dtLMdLtt00
)()()()()( 001 ττττφτψφψ
20 )(
!21 ttLM −≤
Dengan demikian, secara umum dapat dituliskan 1
0 )()!1(
1)()( +−+
≤− jjj ttML
jtt φψ
Bila kedua ruas dilimitkan dengan ∞→j diperoleh ijj
jjjttML
jtt +
∞→∞→−
+≤− )(
)!1(1lim)()(lim 0φψ ...(2.10)
Persamaan ruas kanan pada Persamaan (2.10) bernilai nol maka diperoleh 0)()( ≤− tt φψ . Padahal harga mutlak selalu bernilai lebih besar atau sama dengan nol sehingga )()( tt φψ = berarti kontradiksi dengan pernyataan sebelumnya yaitu penyelesaian
)(tφ berbeda dengan )(tψ . Dengan demikian, seharusnya )()( tt φψ = artinya solusi persamaan differensial (2.8) adalah
tunggal. Satu gambaran dari prilaku dinamik adalah bila mencoba untuk mendesain sistem kontrol sedemikian hingga suatu prilaku yang diharapkan bisa dicapai sesuai dengan tujuan. Sistem dalam hal ini, adalah plant yang dinyatakan dalam sistem persamaan differensial yaitu
)),(),(()( ttutxftx ii =& ni ,...,2,1= Bila secara eksplisit tidak bergantung pada waktu ( t ) disebut sistem autonomous dan sebaliknya bergantung pada waktu disebut sistem non-autonomous. Suatu fungsi yang disimbolkan dengan )(tu pada interval ],[ 10 tt dengan range di
mℜ dikatakan suatu kontrol jika terdapat absolut fungsi kontinu )(tx pada interval ],[ 10 tt dengan range di nℜ sedemikian hingga
penyelesaian dari sistem persamaan differensial
dengan kondisi awal 0)0( xx = menggambarkan ketunggalan suatu kontrol (Gopal, 1987). 2.3.2 Performance Index Berdasarkan kebutuhan yang dinyatakan dalam bentuk plant dapat dirancang kreteria performance matematis atau performance index, selanjutnya diupayakan untuk menentukan solusi yang mengoptimalkan performance index ini. Dalam kasus tertentu, perumasan masalah dapat dengan jelas menunjukkan apa yang dipilih dalam performance index. Sementara dalam masalah lain, pemilihannya merupakan hal yang subjektif. Sebagai contoh, “transfer sistem dari keadaan 0x ke keadaan 1x secepat mungkin” dengan jelas menunjukkan bahwa waktu yang digunakan adalah ukuran performance yang akan dijadikan minimum. Pada sisi lain “ menjaga keadaan x dari sistem tetap dekat dengan nol dengan sebuah pengeluaran energi kontrol yang terkecil “ tidak dapat menyelesaikan secara langsung suatu performance index yang unik. Dalam kasus demikian dapat dicoba beberapa ukuran sebelum dipilih salah satunya yang dapat menghasilkan performance optimal dari apa yang telah dipertimbangkan (Gopal, 1997). Dalam teori kontrol modern, persoalan optimal control adalah untuk mendapatkan kontrol pada sistem dinamik yang sesuai dengan target atau variabel keadaan dan pada waktu yang sama dapat dilakukan optimasi maksimum/minimum pada performance index. Beberapa bentuk performance index (Naidu, 2002) : a. Performance Index for time Optimal Control Sistem
Untuk melakukan transfer sistem yang dinyatakan dari keadaan awal sebarang )( 0tx ke keadaan akhir pada waktu minimum, maka performance index adalah
)),(),(()( ttutxftx =&
∫ =−==jt
tj tttdtJ
0
*0
b. Performance Index for Fuel Optimal Control Sistem Misalkan )(tu adalah thrust dari suatu rocket engine dan diasumsikan bahwa besarnya thurust adalah proposional pada tingkatan konsumsi fuel. Performance index adalah
∫=jt
t
dttuJ0
)(
untuk beberapa kontrol, dapat ditulis :
∫∑=
=jt
t
m
iii dttuRJ
01
)(
dimana R=faktor pemberat c. Performance Index for Minimum Energy Control Sistem
)(tui adalah rangkaian dalam jaringan elektrik pada loop ke-i,
maka ∑=
m
iii rtu
1
2 )( , ir = resistensi dari loop ke-I adalah total
power atau rata-rata total dari energi pada jaringan. Untuk meminumkan total energi kreteria performance adalah :
∫∑=
=jt
t
m
iii dtrtuJ
01
2 )(
atau secara umum dapat ditulis
dimana R= matriks definit positif dengan cara sama, dapat diminimalkan dari integral error kuadrat tracking sistem maka
∫=jt
t
dttRutuJ0
)()(&

∫=jt
t
dttQxtxJ0
)()(&
)()()( txtxtx da −= →)(txd deseried value →)(txa netral value Q = matriks pemberat yang berbentuk semi definit positif d. Performance Index for General Optimal Control Sistem Didefinisikan sebagai berikut : Bentuk kuadratik linear
∫ ++=ft
tff dttRututQxtxtFxtxJ
0
))()()()(()()( &&&
R = Matriks definit positif Q dan F = Matriks semi definit positif Bentuk taklinear :
∫+=ft
tff dtttutxVttxSJ
0
)),(),(()),((
2. 4 Masalah Optimal Control
Pada prinsipnya, tujuan dari optimal control adalah menentukan signal yang akan diproses dalam plant dan memenuhi konstrain fisik. Kemudian, pada waktu yang sama dapat ditentukan ekstrim (maksimum/minimum) yang sesuai dengan kreteria performance index.
Pada gambar 2.4 optimal control adalah mendapatkan optimal control ( *u ), tanda * menyatakan kondisi optimal yang akan mendorong dan mengatur plant C dari keadaan awal sampai keadaan akhir dengan beberapa konstrain pada kontrol dengan keadaan dan waktu yang sama dapat ditentukan ekstrim berdasarkan performance index yang diberikan.
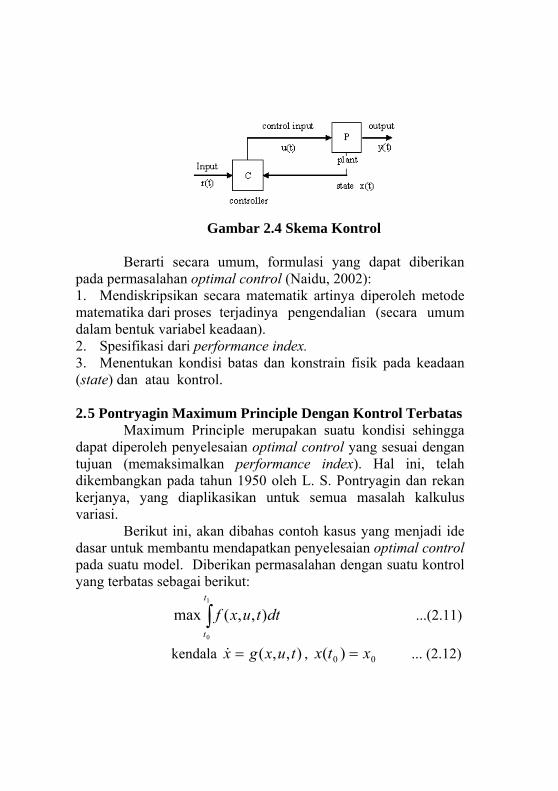
Gambar 2.4 Skema Kontrol
Berarti secara umum, formulasi yang dapat diberikan pada permasalahan optimal control (Naidu, 2002): 1. Mendiskripsikan secara matematik artinya diperoleh metode matematika dari proses terjadinya pengendalian (secara umum dalam bentuk variabel keadaan). 2. Spesifikasi dari performance index. 3. Menentukan kondisi batas dan konstrain fisik pada keadaan (state) dan atau kontrol. 2. 5 Pontryagin Maximum Principle Dengan Kontrol Terbatas
Maximum Principle merupakan suatu kondisi sehingga dapat diperoleh penyelesaian optimal control yang sesuai dengan tujuan (memaksimalkan performance index). Hal ini, telah dikembangkan pada tahun 1950 oleh L. S. Pontryagin dan rekan kerjanya, yang diaplikasikan untuk semua masalah kalkulus variasi.
Berikut ini, akan dibahas contoh kasus yang menjadi ide dasar untuk membantu mendapatkan penyelesaian optimal control pada suatu model. Diberikan permasalahan dengan suatu kontrol yang terbatas sebagai berikut:
∫1
0
),,(maxt
t
dttuxf ...(2.11)
kendala ),,( tuxgx =& , 00 )( xtx = ... (2.12)

bua ≤≤ ... (2.13)
Untuk ),,( tuxgx =& dapat ditulis 0),,( =− xtuxg & sedemikian hingga dapat diperoleh
( ) xtuxgtuxfxtuxgtuxfL && λλλ −+=−+= ),,(),,(),,(),,( . Misalkan, J adalah integral dari 0t sampai 1t untuk L .
( )∫ −+=1
0
),,(),,(t
t
dtxtuxgtuxfJ &λλ
Padahal
dtxtxtdtxt
t
t
t
t
t∫∫ +−=−1
0
1
0
1
0
)()( λλλ &&
dtxtxttxtt
t∫++−=1
0
)()()()( 0011 λλλ &
sehingga diperoleh
( ) )()()()(),,(),,( 0011
1
0
txttxtdtxtuxgtuxfJt
t
λλλλ +−++= ∫ & …(2.14)
Berarti untuk J bernilai maksimum
( ) )()(),,(),,( 1*
1******
1
0
txtdtxtuxgtuxfJt
t
λλλ −++= ∫ &
)()( 0*
0 txtλ+ …(2.15) Dengan menggunakan Persamaan (2.14) dan (2.15) dapat diperoleh
( ) −+−++=− ∫ )()()()(),,(),,( 0011*
1
0
txttxtdtxtuxgtuxfJJt
t
λλλλ &
( ) )()()()(),,(),,( 0*
01*
1*****
1
0
txttxtdtxtuxgtuxft
t
λλλλ +−++∫ &

( ) +−+−+−= ∫1
0
)()),,(),,((),,(),,( *****t
t
dtxxtuxgtuxgtuxftuxf λλ &
( ) ( ))()()()()()( 0*
001*
11 txtxttxtxt −+− λλ
Karena )(tx mempunyai nilai awal maka 00*
0 )()( xtxtx ==
( )
( )∫
∫
−−
−−+−=−
ft
t
t
t
txtxt
dtxxtuxgtuxgtuxftuxfJJ
0
1
0
)()()(
)(),,(),,((),,(),,(
1*
11
******
λ
λλ &
Kemudian, dilakukan ekspansi deret Taylor terhadap persamaan )),,(),,((),,(),,( **** tuxgtuxgtuxftuxf −+− λ , sedemikian hingga
menjadi
( )( ) ( )( ) ( )
∫
∫
+
−−−++−++=−
1
0
1
0
..
)()()( 1*
11***
t
t
t
tuuxx
toh
txtxtdtuugfxxgfJJ λλλλ &
untuk ugg
xgg
uff
xff uxux ∂
∂=
∂∂
=∂∂
=∂∂
= ,,,
Asumsikan bahwa *** ,, uuuxxxJJJ −=−=−= δδδ , sehingga dapat ditulis kembali
( ) ( )∫ −++++=1
0
)()( 22
t
tuuxx txtudtgfxgfJ δλδλδλλδ & …(2.16)
Dengan memilih λ& yang memenuhi ( ) 0)(, 1 =+−= tgf xx λλλ& …(2.17)
sehingga Persamaan (2.16) dapat direduksi menjadi
( )∫ +=1
0
t
tuu udtgfJ δλδ

Sedemikian hingga untuk λ,,ux merupakan solusi yang optimal maka
( ) 01
0
≤+= ∫t
tuu udtgfJ δλδ ...(2.18)
Untuk itu, dibutuhkan suatu kemungkinan untuk memodifikasi
uδ yang memenuhi Persamaan (2.18). Jika optimal control adalah pada batas bawah a untuk t maka modifikasi kontrol
ua δ+ yang tidak bisa kurang dari a , jadi dibutuhkan 0≥uδ . Dengan cara yang sama, jika optimal control adalah pada batas atas maka bentuk modifikasi kontrol ub δ+ yang tidak bisa lebih dari b , jadi dibutuhkan 0≤uδ . Kesimpulannya
terlarangtakuuu
=≤≥
δδδ
00
buajika
bujikaaujika
<<==
Supaya Persamaan (2.17) konsisten untuk semua uδ , karena itu dipilih
btubtua
atu
=<<
=
)()(
)(
⎪⎭
⎪⎬
⎫
≥+=+≤+
tpadagfjikahanyadanjikatpadagfjikahanyadanjikatpadagfjikahanyadanjika
uu
uu
uu
000
λλλ
...(2.19)
atau ekivalen dengan
000
>+=+<+
uu
uu
uu
gfgfgf
λλλ
btudenganbtuadengan
atudengan
=≤≤
=
)()(
)(
Berarti, jika **,ux penyelesaian Persamaan (2.11) – (2.13) maka
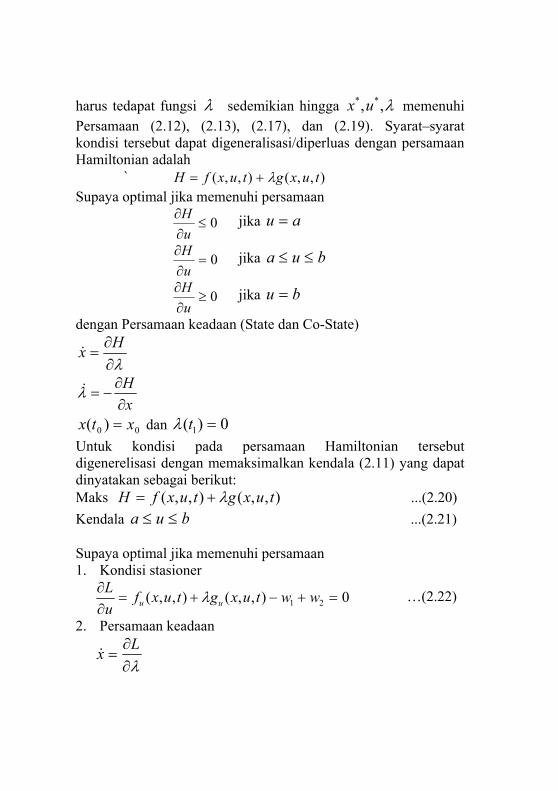
harus tedapat fungsi λ sedemikian hingga λ,, ** ux memenuhi Persamaan (2.12), (2.13), (2.17), dan (2.19). Syarat–syarat kondisi tersebut dapat digeneralisasi/diperluas dengan persamaan Hamiltonian adalah
` ),,(),,( tuxgtuxfH λ+= Supaya optimal jika memenuhi persamaan
0≤∂∂
uH jika au =
0=∂∂
uH jika bua ≤≤
0≥∂∂
uH jika bu =
dengan Persamaan keadaan (State dan Co-State)
λ∂∂
=Hx&
xH∂∂
−=λ&
00 )( xtx = dan 0)( 1 =tλ Untuk kondisi pada persamaan Hamiltonian tersebut digenerelisasi dengan memaksimalkan kendala (2.11) yang dapat dinyatakan sebagai berikut: Maks ),,(),,( tuxgtuxfH λ+= ...(2.20) Kendala bua ≤≤ ...(2.21) Supaya optimal jika memenuhi persamaan 1. Kondisi stasioner
0),,(),,( 21 =+−+=∂∂ wwtuxgtuxf
uL
uu λ …(2.22)
2. Persamaan keadaan
λ∂∂
=Lx&

xL∂∂
−=λ&
dengan 00 )( xtx = dan 0)( 1 =tλ Dari Persamaan (2.22) dapat diperoleh bentuk optimal control
)( *u . 2.6 Metode Beda Hingga
Jika )(xuu = maka turunan pertama dari u terhadap x didefinisikan
h
hxuhxu
hhxuxu
hxuhxu
dxdu
hhh
⎟⎠⎞
⎜⎝⎛ −−⎟
⎠⎞
⎜⎝⎛ +
=−−
=−+
=→→→
22lim)()(lim)()(lim000
Jika )(xuu = diekspansikan menurut deret taylor
1. ...)(!2
)(!1
)()( 2
22
+++=+ xdx
udhxdx
hduxuhxu ...(2.23)
)()()()( hoxdx
hduxuhxu +=−+
dxdu
hxuhxu
≈−+ )()(
...(2.24)
Persamaan ini disebut persamaan beda hingga maju.
2. ...)(!2
)(!1
)()( 2
22
++−=− xdx
udhxdx
hduxuhxu
...(2.25)
)()()()( hoxdx
hduhxuxu +=−−
dxdu
hhxuxu
≈−− )()( …(2.26)
Persamaan ini disebut persamaan beda hingga mundur.
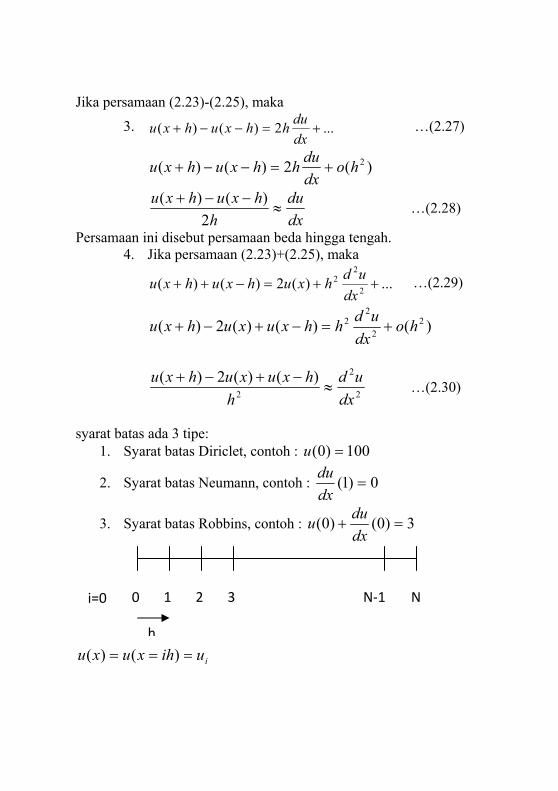
Jika persamaan (2.23)-(2.25), maka
3. ...2)()( +=−−+dxduhhxuhxu …(2.27)
)(2)()( 2hodxduhhxuhxu +=−−+
dxdu
hhxuhxu
≈−−+
2)()(
…(2.28)
Persamaan ini disebut persamaan beda hingga tengah. 4. Jika persamaan (2.23)+(2.25), maka
...)(2)()( 2
22 ++=−++
dxudhxuhxuhxu
…(2.29)
)()()(2)( 22
22 ho
dxudhhxuxuhxu +=−+−+
2
2
2
)()(2)(dx
udh
hxuxuhxu≈
−+−+ …(2.30)
syarat batas ada 3 tipe:
1. Syarat batas Diriclet, contoh : 100)0( =u
2. Syarat batas Neumann, contoh : 0)1( =dxdu
3. Syarat batas Robbins, contoh : 3)0()0( =+dxduu
iuihxuxu === )()(
0 1 NN‐12 3
h
i=0

huu
dxdu ii −
= +1 adalah beda maju
huu
dxdu ii 1−−
= adalah beda mundur
huu
dxdu ii
211 −+ −
= adalah beda tengah
211
2
2 2h
uuudx
ud iii −+ +−=
Contoh 1 :
Misalkan xdx
ud=− 2
2
pada (0,1) dengan syarat batas diriclet
0)0( =u dan 0)1( =u dan 41
=h
Jawab :
ihh
uuu iii =+−
− −+2
11 2 dengan 0)0( =u dan 0)4( =u untuk
3,2,1=i 3
11 2 ihuuu iii =−+− −+ Untuk i=1, maka
6412 210 =−+− uuu
6412 21 =− uu
Untuk i=2, maka
3212 321 =−+− uuu
Untuk i=3, maka

6432 432 =−+− uuu
6432 32 =+− uu
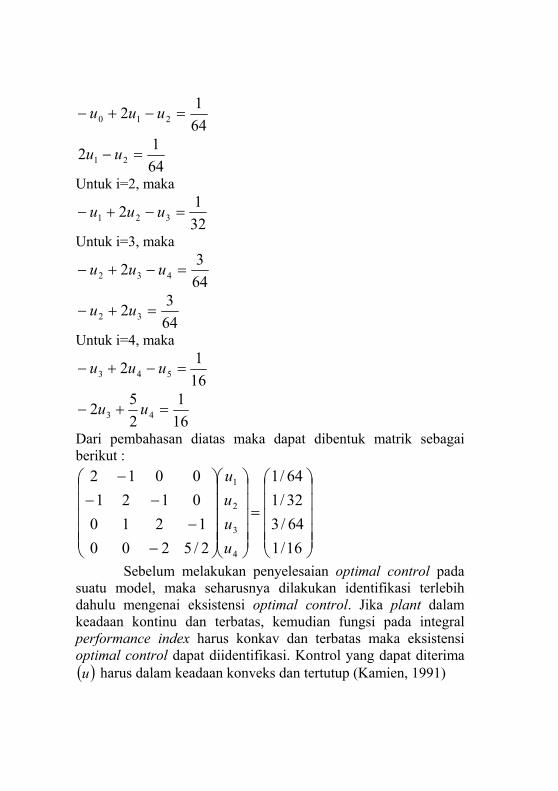
Dari pembahasan diatas maka dapat dibentuk matrik sebagai berikut :
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−
−
64/332/164/1
210121012
3
2
1
uuu
Contoh 2 :
Misalkan xdx
ud=− 2
2
pada (0,1) dengan syarat batas Neumann
0)0( =u dan 0)1( =dxdu
dan 41
=h
Jawab :
ihh
uuu iii =+−
− −+2
11 2 dengan 0)0( =u dan 0)1( =
dxdu
untuk
4,3,2,1=i 3
11 2 ihuuu iii =−+− −+ Untuk i=1, maka
6412 210 =−+− uuu
6412 21 =− uu
Untuk i=2, maka
3212 321 =−+− uuu
Untuk i=3, maka

6432 432 =−+− uuu
6432 32 =+− uu
Untuk i=4, maka
1612 543 =−+− uuu
16122 43 =+− uu
Dari pembahasan diatas maka dapat dibentuk matrik sebagai berikut :
Contoh 3 :
Misalkan xdx
ud=− 2
2
pada (0,1) dengan syarat batas Robbin
0)0( =u dan 0)1()1( =+dxduu dan
41
=h
Jawab :
ihh
uuu iii =+−
− −+2
11 2 dengan 0)0( =u dan 0)1()1( =+
dxduu
untuk 4,3,2,1=i 3
11 2 ihuuu iii =−+− −+ Untuk i=1, maka
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
−−−
−−−
16/3364/332/164/1
22001210
01210012
4
3
2
1
uuuu
6412 210 =−+− uuu
6412 21 =− uu
Untuk i=2, maka
3212 321 =−+− uuu
Untuk i=3, maka
6432 432 =−+− uuu
6432 32 =+− uu
Untuk i=4, maka
1612 543 =−+− uuu
161
252 43 =+− uu
Dari pembahasan diatas maka dapat dibentuk matrik sebagai berikut :
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
−−
−−−
16/164/332/164/1
2/52001210
01210012
4
3
2
1
uuuu
Sebelum melakukan penyelesaian optimal control pada suatu model, maka seharusnya dilakukan identifikasi terlebih dahulu mengenai eksistensi optimal control. Jika plant dalam keadaan kontinu dan terbatas, kemudian fungsi pada integral performance index harus konkav dan terbatas maka eksistensi optimal control dapat diidentifikasi. Kontrol yang dapat diterima ( )u harus dalam keadaan konveks dan tertutup (Kamien, 1991)
BAB III METODE PENELITIAN
Metode penelitian yang digunakan untuk memecahkan
permasalahan dalam tugas akhir ini adalah sebagai berikut:
3.1 Studi Literatur Studi Literatur mengenai model TB dua strain untuk
dilakukan analisis dan simulasi terhadap optimal control yang akan menjadi objek penelitian. Pemahaman terhadap model sistem dan performance index sebagai ide untuk melakukan pembahasan masalah. Tentunya, juga pemahaman masalah optimal control sangat membantu dalam penyelesaian model tersebut dalam mencari bentuk optimal control. Selain itu, teori dasar yang mendukung pembahasan meliputi: Pontryagin Maximum Principle, metode Beda Hingga, dan teori-teori yang berhubungan dengan eksistensi , penyelesaian dan ketunggalan optimal control.
3.2 Analisis Eksistensi Optimal Control
Pada tahap ini, akan dilakukan analisis mengenai eksistensi suatu optimal control. Untuk mengujinya dibentuk suatu teorema yang dapat mengidentifikasi eksistensi optimal control pada model TB dua strain.
3.3 Penyelesaian Optimal Control
Optimal control diselesaikan menggunakan Pontryagin Maximum Principle dengan kontrol terbatas. Langkah-langkahnya adalah membentuk persamaan Hamiltonian. Dari persamaan Hamiltonian tersebut, dapat diperoleh kondisi stasioner (prinsip maksimal). Selanjutnya, dapat diperoleh optimal control dari model TB dua strain.
3.4 Analisis Ketunggalan Optimal Control Untuk menganalisis ketunggalan optimal control yang
dipresentasikan dalam bentuk dependen, akan dilakukan analisis ketunggalan penyelesaian pada sistem Hamiltonian yang terbentuk.
3.5 Simulasi Numerik
Optimal control diselesaikan dengan menggunakan metode Beda hingga. Langkah-langkahnya adalah menyelesaikan model sistem dengan menggunakan metode Beda hingga maju, dan fungsi adjoin yang diperoleh diselesaikan dengan menggunakan metode Beda hingga mundur karena adanya kondisi transversal. Selanjutnya, dapat diperoleh penyelesaian model sistem secara numerik.
3.6 Penarikan Kesimpulan
Pada tahap ini, dilakukan penarikan kesimpulan mengenai pengendalian optimal pada penanganan tuberkulosis dua strain.

BAB IV PEMBAHASAN
Model TB dua strain mempunyai bentuk sistem model berupa persamaan differensial taklinear. Oleh karena itu, penyelesaian optimal control berbentuk dependen maka dikaji mengenai sifat-sifat penyelesaian dari optimal control tersebut. Diharapkan bisa memberi informasi, bahwa penyelesaian optimal control yang didapatkan adalah tepat. 4.1 Analisis Eksistensi Optimal Control Pada bagian ini, akan dilakukan identifikasi terhadap eksistensi optimal control pada model TB dua strain. Teorema 4.1[Jung, 2002] :
Permasalahan pada Persamaan (1.1) dan (1.3), yang memenuhi i. Kontrol Uuuu ∈= ),( 21 tidak kosong . ii. Kontrol Uuuu ∈= ),( 21 konveks dan tertutup. iii. Persamaan ruas kanan pada state sistem yang kontinu adalah
terbatas pada state dan kontrol, kemudian dapat dituliskan sebagai fungsi linear pada variabel kontrol dengan koefisien yang bergantung pada waktu dan state.
iv. Integrand pada performance index konkav pada U . v. Integrand pada performance index terbatas. maka terdapat optimal control Uuuu ∈= ),( *
2*1
* sedemikian hingga ),(),( *
2*121),( 21
uuJuuJmaksUuu
=∈
dengan
( ){ }2,1,10|, 21 =<≤≤≤= iuntukbuauuU iii . Maka akan ditunjukkan permasalahan (1.1) dan (1.3) memenuhi teorema 4.1. Bukti :
Berdasarkan, asumsi permasalahan bahwa lama perawatan pada interval waktu tertentu maka TILILS ,,,,, 2211 adalah terbatas, sedemikian hingga
maksmaks
maksmaksmaksmaks
TTIILLIILLSS
≤≤
≤≤≤≤
;;;;;
22
221111
i. Kontrol Uuuu ∈= ),( 21 Tidak Kosong.
Secara umum, sistem yang didesain dengan adanya suatu kontrol supaya dapat mencapai tujuan yang diinginkan (performance index). Akan tetapi, jika kontrol tersebut kosong maka tidak ada tindakan pada sistem tersebut. Berarti, sulit dicapai tujuan yang diinginkan.
Dengan kontrakdiksi, andaikan
dttuBtuBtItLuuJft
Uuu])(
2)(
2)()([),(min
0
22
221
12221),( 21
∫ +++−=∈
berarti
menggambarkan tujuan dari plant yaitu memaksimalkan atau memperbesar jumlah grup strain yang tahan obat. Tujuan seperti ini, tentunya dapat memperbanyak grup TB. Berarti tidak perlu adanya tindakan untuk memperbanyak grup TB, artinya kontrol harus kosong. Hal ini, kontradiksi karena pada interval waktu
],0[ ft terdapat tindakan. Dengan demikian terbukti, seharusnya fungsi kontrol tidak kosong sedemikian hingga
dttuB
tuB
tItLuuJft
Uuu])(
2)(
2)()([),(min
0
22
221
12221),( 21
∫ +++−=∈
yang menggambarkan tujuan dari plant tersebut yaitu mengurangi jumlah grup TB yang tahan obat. ii. Kontrol Uuuu ∈= ),( 21 Konveks dan Tertutup
Akibat (i) maka dapat dijamin bahwa kontrol pada model TB dua strain tidak kosong maka dapat dilakukan analisis mengenai sifat dari kontrol tersebut yaitu konveks dan tertutup.

a. Kontrol Uuuu ∈= ),( 21 konveks Ambil sebarang Uuuu ∈= ),( 21 dan
Uuuu ∈= ),( 2'
1'' , berdasarkan Definisi akan dibuktikan
Uuuz ∈−+= ')1( εε , untuk semua ]1,0[∈ε . Berarti, Uuuz ∈−+= ')1( εε
))1(,)1((
))1(,)1((),(
),)(1(),(
'22
'11
'2
'121
'2
'121
uuuu
uuuu
uuuu
εεεε
εεεε
εε
−+−+=
−−+=
−+=
karena 2,1,10 =<≤≤≤ ibua iii sedemikian hingga
11'
1 )1( buu ≤−+ εε dan 22'
2 )1( buu ≤−+ εε maka ],[)1( 111
'1 bauu ∈−+ εε dan ],[)1( 222
'2 bauu ∈−+ εε .
Jadi, dapat ditunjukkan bahwa Uz∈ .
b. Kontrol Uuuu ∈= ),( 21 tertutup
111 bua ≤≤ dengan 10 111 <≤≤≤ bua tertutup sebab berdasarkan Definisi sebarang titik
],[ 111 bau ∉ , maka 11 au < dan 12 bu > . Jika 11 au < , ambil
111auu −=ε maka φε =∩ )(],[ 111 uVba . Jika 12 bu > ,
ambil 111buu −=ε maka φε =∩ )(],[ 111 uVba . Dengan
cara yang sama, dapat ditunjukkan bahwa 222 bua ≤≤ dengan 10 222 <≤≤≤ bua tertutup.
Berdasarkan (a) dan (b) maka Uuuu ∈= ),( 21 konveks dan tertutup.

iii. Persamaan Ruas Kanan Pada State Sistem Yang Kontinu Adalah Terbatas pada State dan Kontrol, Kemudian Dapat Dituliskan Sebagai Fungsi Linear Pada Variabel Kontrol Dengan Koefisien Yang Bergantung Pada Waktu Dan State.
Bukti: Untuk laju populasi yang berpotensi terkena TB
SNI
SNI
SS µββ −−−Λ= ∗ 211
& maka SS µ−Λ≤& .
Berarti batas atas dari laju populasi yang berpotensi terkena TB adalah maksSµ−Λ Untuk laju populasi yang terinfeksi TB strain 1 tetapi belum menularkan.
NI
L
NI
TIprtuLrtuLkNI
SL
21
1212211111
111 ))(1()()(
∗−
+−+−+−=
β
βµβ&
maka
NI
TIprNI
SL 1212
111 ββ ++≤&
Berarti batas atas laju populasi yang terinfeksi dengan TB strain 1 tetapi belum menularkan adalah
NI
TIprN
IS maks
maksmaksmaks
maks1
2121
1 ββ ++
Untuk laju populasi yang terinfeksi dengan TB strain 1.
1211111 )( IrIdLkI −+−= µ& maka 111 LkI ≤& Berarti batas atas laju populasi yangf terinfeksi dengan TB strain 1 adalah maksLk 11

Untuk laju populasi yang terinfeksi dengan TB strain 2 yang tahan obat tetapi belum menularkan
NITLSLkIqrtuL 2
1221222 )()())(1( ++++−−= ∗βµ& maka
NITLSIqrL 2
1122 )( +++≤ ∗β&
Berarti batas atas laju populasi yang terinfeksi dengan TB strain 2 yang tahan obat tetapi belum menularkan adalah
NI
TLSIqr maksmaksmaksmaksmaks
2112 )( +++ ∗β
Untuk laju populasi yang terinfeksi TB strain 2 yang tahan obat
22222 )( IdLkI +−= µ& maka 222 LkI ≤& Berarti batas atas laju populasi yang terinfeksi TB strain 2 dengan sifat tahan obat adalah maksLk 22 Untuk laju populasi yang dirawat (dengan efektif)
TNIT
NITIrqptuLrtuT µββ −−−+−−+= ∗ 21
2122111 ))))((1(1()(&
maka 122111 ))))((1(1()( IrqptuLrtuT +−−+≤&
Berarti batas atas laju populasi yang dirawat (dengan efektif) adalah maksmaks IrqptuLrtu 122111 ))))((1(1()( +−−+ . Kemudian, berdasarkan asumsi bahwa fungsi kontrol dalam keadaan terbatas maka terdapat bilangan positif 1M dan 2M sedemikian hingga 11 Mu ≤ dan 22 Mu ≤ Dengan demikian,
maksmaks IrqpMLrMT 122111 )))(1(1( +−−+≤& Jika diambil 0>ε dan
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
+−−+
+++
++−Λ
=∗
maksmaks
maksmaksmaksmaksmaks
maksmaks
maksmaksmaks
maksmaksmaks
IrqpMLrMN
ITLSIqr
LkLkN
ITIpr
NI
SS
maksM
122111
2112
2211
1212
11
)))(1(1(
,)(
,,
,,
β
ββµ
Jadi, mudah dipahami bahwa solusi persamaan dari sistem adalah terbatas. Kemudian, pada sistem persamaan (1.1) dapat dibentuk menjadi
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ))()()()(),(),(),(),(),()(
)()()()(),(),(),(),(),()(
)()()()(),(),(),(),(),()(
)()()()(),(),(),(),(),()(
)()()()(),(),(),(),(),()(
)()()()(),(),(),(),(),()(
12112211
121122112
121122112
121122111
121122111
12112211
tIztutLwutTtItLtItLtSvdt
tdT
tIttutLsutTtItLtItLtSrdt
tdI
tIqtutLputTtItLtItLtSodt
tdL
tIntutLmutTtItLtItLtSldt
tdI
tIktutLjutTtItLtItLtSidt
tdL
tIhtutLgutTtItLtItLtSfdt
tdS
++=
++=
++=
++=
++=
++=
Dengan
( )
( )
( ) 1211112211
11
212111
12211
2112211
)()(),(),(),(),(),(
)()(),(),(),(),(),(
)(),(),(),(),(),(
IrIdLktTtItLtItLtSl
LNITIprLk
NIStTtItLtItLtSi
SNIS
NIStTtItLtItLtSf
−+−=
−+++−=
−−−Λ=
∗
∗
µ
ββµβ
µββ
( )NITLSLkIqrtTtItLtItLtSo 2
122122211 )()()(),(),(),(),(),( ++++−= ∗βµ

( )
( )
( ) ( ) ( ) ( ) ( ) ( ) ( )( )( ) ( )( )( ) )()()(
)()()()()(
)()(0)()()()()()()(
)(),(),(),(),(),(
)()(),(),(),(),(),(
121
111
1211
111
1111111
2122211
22222211
tIrqptIztLrtLw
tIprtIqtIktLrtLj
tIttLstLptIntLmtIhtLg
TNIT
NITtTtItLtItLtSv
IdLktTtItLtItLtSr
+==
−==−=
=======
−−−=
+−=
∗ µββ
µ
Berarti sistem berbentuk linear pada 1u dan 2u dengan koefisien yang bergantung pada waktu dan state. iv. Integrand Pada Performance Index Konkav Pada U
Ambil sebarang [ ]1111 ,, bavu ∈ dan [ ]2222 ,, bavu ∈ untuk setiap 10 ≤≤ε dengan
)(2
)(2
)()(),( 22
221
12221 tuBtuBtItLuuJ −−−−= .
Berdasarkan definisi 2.2.6.1 akan ditunjukkan bahwa : ( ) ( )( ) ( ) ( ) ( )21212211 ,,11,1 vvJuuJvuvuJ εεεεεε +−≥+−+− .
Untuk
( ) ( )
( )2222
211
1221211
)1(2
)1(2
)1(,)1(
vuB
vuBILvuvuJ
εε
εεεεεε
+−−
+−−−−=+−+−
Untuk
( ) ( )
⎟⎠⎞
⎜⎝⎛ −−−−+
⎟⎠⎞
⎜⎝⎛ −−−−−=+−
)(2
)(2
)()(
)(2
)(2
)()()1(,,)1(
22
221
122
22
221
1222121
tvBtvBtItL
tuBtuBtItLvvJuuJ
ε
εεε

Dengan menjabarkan kuadratnya sehingga :
( ) ( )
( ) ( ) ( )2222
22111
122
2
21
1221211
)()1(22
)()1(22
)1(2
)1(2
)()()1(,)1(
vvuBvvuBuB
uBtItLvuvuJ
εεεεεεε
εεεεε
+−−+−−−−
−−−−=+−+−
( ) ( )
⎟⎠⎞
⎜⎝⎛ −−−−+
⎟⎠⎞
⎜⎝⎛ −−+=+−
)(2
)(2
)()(
)(2
)(2
)(2
)(2
,,)1(
22
221
122
22
221
122
221
12121
tvBtvBtItL
tvBtvBtuBtuBvvJuuJ εεε
Berarti untuk menunjukkan bahwa J konkav pada U maka harus dibuktikan
( ) ( )22222
111
22
22
221
122
22
221
122
)1(2
)1(2
)(2
)(2
)()()(2
)(2
)()()1(
vuBvuBIL
tvBtvBtItLtuBtuBtItL
εεεε
εε
+−−+−−−−≤
⎟⎠⎞
⎜⎝⎛ −−−−+⎟
⎠⎞
⎜⎝⎛ −−−−−
atau
⎟⎠⎞
⎜⎝⎛ −−−−+⎟
⎠⎞
⎜⎝⎛ −−−−− )(
2)(
2)()()(
2)(
2)()()1( 2
222
11
2222
221
122 tvBtvBtItLtuBtuBtItL εε
( ) ( ) 0)1(2
)1(2
222
2211
122 ≤⎟
⎠⎞
⎜⎝⎛ +−−+−−−−− vu
Bvu
BIL εεεε
… (4.1)
Dilain pihak
⎟⎠⎞
⎜⎝⎛ −−−−+⎟
⎠⎞
⎜⎝⎛ −−−−− )(
2)(
2)()()(
2)(
2)()()1( 2
222
11
2222
221
122 tvBtvBtItLtuBtuBtItL εε
( ) ( ) =⎟
⎠⎞
⎜⎝⎛ +−−+−−−−− 2
2222
111
22 )1(2
)1(2
vuB
vuB
IL εεεε
( )2111
21
1 )1()1(2)1(2
vvuuBεεεεεε −+−−−−

( )2222
22
2 )1()1(2)1(2
vvuuB
εεεεεε −+−−−− …(4.2)
atau bisa ditulis untuk persamaan ruas kanan (4.1) pada diatas dan karena 0, 21 >BB maka
( ) ( )( ) ( ) ( )( ) 0112
112
2
2222
111 ≤−−−−−−−− vuBvuB
εεεεεεεε
Jadi, Persamaan diatas dapat terpenuhi, artinya integrand pada performance index konveks.
v. Integrand Pada Performance Index Terbatas.
Misalnya terdapat 01 >c , 02 >c , 03 >c dan
mengingat TILILS ,,,,, 2211 terbatas pada ],0[ ft sedemikian hingga
maksmaks
maksmaksmaksmaks
TTIILLIILLSS
≤≤
≤≤≤≤
;;;;;
22
221111
dan pilih 2
,2
213
BBc ≥ , berarti
⎥⎦⎤
⎢⎣⎡ +++−=−−−− )(
2)(
2)()()(
2)(
2)()( 2
222
11
2222
221
122 tu
Btu
BtItLtu
Btu
BtItL
( ))()( 2
2321322 tuctucIL maksmaks +++−≥
)()()(2
)(2
)()( 223
21322
22
221
122 tuctucILtu
Btu
BtItL maksmaks +++≤+++
( ))()( 22
21321 tutuccc +++=
Akibat fungsi kontrol yang terletak pada interval iii bua ≤≤≤0
, untuk i=1,2 maka 22ii uu = . Berarti dapat diperoleh
( )22
21321
22
221
122 )()()(
2)(
2)()( tutuccctuBtuBtItL +++≤+++ Jadi,
dengan menganggap ( ))()( 22
21321 tutucccM +++= maka

terdapat suatu konstanta M sedemikian hingga
MtuBtuBtItL ≤+++ )(2
)(2
)()( 22
221
122 . Artinya integrand pada
performance index adalah terbatas . Berdasarkan teorema di atas, terlihat bahwa optimal control pada model TB dua strain dapat dijamin karena terdapat optimal control yang dapat memaksimalkan performance index yang diinginkan.
4.2 Penyelesaian Optimal Control
Untuk mendapatkan penyelesaian optimal control dari Persamaan (1.1), (1.2), digunakan Pontryagin Maximum Principle. Metode ini merupakan pengembangan dari masalah kalkulus variasi. Hamiltonian yang terbentuk adalah :
∑=
++++=6
1
22
221
122 )(
2)(
2)()(
iii gtu
Btu
BtItLH λ …(4.3)
Dimana g merupakan persamaan diferensial sebelah kanan dari variable keadaan ke-i, sehingga bisa ditulis :
)()(2
)(2
)()( 2111
22
221
122 S
NI
SNI
StuB
tuB
tItLH µββλ −−−Λ++++= ∗
⎟⎠⎞
⎜⎝⎛ −+−+−+−+ ∗
NIL
NITIprtuLrtuLk
NIS 2
11
2122111111
12 ))(1()()( ββµβλ
( ) ⎟⎠⎞
⎜⎝⎛ ++++−−+−+−+ ∗
NITLSLkIqrtuIrIdLk 2
12212241211113 )()())(1()( βµλµλ
( ) ⎟⎠⎞
⎜⎝⎛ −−−+−−+++−+ ∗ T
NI
TNI
TIrqptuLrtuIdLk µββλµλ 212122111622225 ))))((1(1()()(
Persamaan co-state dapat diperoleh dari :
λ∂∂
=Hx&
xH∂∂
−=λ&
Sehingga
SH
dtd
∂∂
−=1λ , 0)(1 =ftλ
.
.
TH
dtd
∂∂
−=6λ , 0)(6 =ftλ
State variables :
SNI
SNI
SHS µββλ
−−−Λ=∂∂
= ∗ 211
1
&
NIL
NITIprtuLrtuLk
NISHL
21
1212211111
11
21 ))(1()()(
∗−
+−+−+−=∂∂
=
β
βµβλ
&
1211113
1 )( IrIdLkHI −+−=∂∂
= µλ
&
NI
TLSLkIqrtuHL 2122122
42 )()())(1( ++++−−=
∂∂
= ∗βµλ
&
22225
2 )( IdLkHI +−=∂∂
= µλ
&
TNI
T
NI
TIrqptuLrtuHT
µβ
βλ
−−
−+−−+=∂∂
=
∗ 2
12122111
6
))))((1(1()(&
Co-state variables nya :
⎟⎟⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛++=
∂∂
−= ∗
NI
NI
NI
NI
SH *
2*4
*1
12
*2
*1
111 βλβλµββλλ&

( )
( )1*
16
*2
413
*2
11121
2
)(
)((
rtu
NIk
NIrtuk
LH
−+
⎟⎟⎠
⎞⎜⎜⎝
⎛−+−+⎟⎟
⎠
⎞⎜⎜⎝
⎛+++=
∂∂
−= ∗∗
λ
βλλβµλλ&
⎟⎟⎠
⎞⎜⎜⎝
⎛+−−−+⎟⎟
⎠
⎞⎜⎜⎝
⎛=
∂∂
−=NTprtu
NS
NS
IH *
22*
2
*
12
*
111
3 ))(1( ββλβλλ&
( ) ( )
⎟⎟⎠
⎞⎜⎜⎝
⎛++−−−+
−++++
NTrqptu
qrturd*
22*
26
2*
24213
))))((1(1(
))(1((
βλ
λµλ
( ) ( )25242
4 1 kkLH
−+++−=∂∂
−= λµλλ&
⎟⎟⎠
⎞⎜⎜⎝
⎛ +++⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟⎠
⎞⎜⎜⎝
⎛+−=
∂∂
−= ∗∗∗
NTLS
NL
NS
IH **
1*
4
*1
2
*
12
5 1 βλβλβλλ&
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛+++ ∗
NTd
*
625 βλµλ
⎟⎟⎠
⎞⎜⎜⎝
⎛+++⎟
⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟⎠
⎞⎜⎜⎝
⎛−=
∂∂
−= µββλβλβλλNI
NI
NI
NI
TH *
22
*1
26
*2
24
*1
226&
Berdasarkan prinsip optimal didapat :
01
=∂∂uH dan 0
2
=∂∂uH , Sehingga diperoleh :
1. Untuk optimal control *1u
011611211
1
=+−=∂∂ LrLruBuH λλ
11611211 LrLruB λλ −=
*1162
1
*1 )(1)( Lr
Btu λλ −= …(4.4)
Karena 1*11 bua ≤≤ , maka dapat ditulis

)),)(1,(min()( 1*1162
11
*1 bLr
Bamakstu λλ −=
…(4.5)
2. Untuk optimal control *
2u
0)( 61241221222
2
=++−−=∂∂ λλλ IrqpIqrIpruBuH
61241221222 )( λλλ IrqpIqrIpruB +−+=
( ) *
126422
*2 )(1)( Irqpqp
Btu λλλ +−+= …(4.6)
Karena 2*22 bua ≤≤ , maka dapat ditulis
),,(min()( 22*
2 bzamakstu = …(4.7)
Dengan ( ) ))(1 *12642
2
IrqpqpB
z λλλ +−+=
Kemudian Optimal control yang fisibel disubstitusikan ke dalam persamaan keadaan. maka dapat diperoleh sistem persamaan differensial sebagai berikut:
SNI
SNI
SS µββ −−−Λ= ∗ 211
&
111*1162
1111
111 ),)(1,(min()( LrbLr
BamaksLk
NI
SL ⎟⎟⎠
⎞⎜⎜⎝
⎛−−+−= λλµβ&
( )
NIL
NIT
IprbIrqpqpB
amaks
21
12
122*
126422
2 )),)(1,(min(1
∗−+
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+−+−+
ββ
λλλ
1211111 )( IrIdLkI −+−= µ&
( ) 122*
126422
22 )),)(1,(min(1 IqrbIrqpqpB
amaksL ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+−+−= λλλ&
NI
TLSLk 2122 )()( ++++− ∗βµ
22222 )( IdLkI +−= µ&
111*1162
11 ),)(1,(min( LrbLr
BamaksT ⎟⎟
⎠
⎞⎜⎜⎝
⎛−= λλ&
( ) 122*
126422
2 ))()),)(1,(min(11 IrqpbIrqpqpB
amaks +⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+−+−−+ λλλ
TNI
TNI
T µββ −−− ∗ 212
⎟⎟⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛++= ∗
NI
NI
NI
NI *
2*4
*1
12
*2
*1
111 βλβλµββλλ&
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−++= ∗
NIrbLr
Bamaksk
*2
11*1162
11122 ),)(1,(min(( βλλµλλ&
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−+−+ ∗
11*1162
116
*2
413 ),)(1,(min( rbLrB
amaksNIk λλλβλλ
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+−+−−−=
NTprbIrqpqp
Bamaks
NS *
222*
126422
2
*
123 )),)(1,((min1 βλλλβλλ&
( ) ( )⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+−+−++++⎟⎟
⎠
⎞⎜⎜⎝
⎛22
*12642
224213
*
11 )),)(1,(min(1( qrbIrqpqpB
amaksrdNS
λλλλµλβλ
( )⎠
⎞
⎜⎜
⎝
⎛++
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+−+−−−+
NTrqpbIrqpqp
Bamaks
*
222*
126422
26 ))()),)(1,((min11 βλλλλ
( ) ( )25244 1 kk −+++−= λµλλ&
( )25
**1
*
4
*1
2
*
15 1 dN
TLSNL
NS
++⎟⎟⎠
⎞⎜⎜⎝
⎛ +++⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟⎠
⎞⎜⎜⎝
⎛+−= ∗∗∗ µλβλβλβλλ&

⎟⎟⎠
⎞⎜⎜⎝
⎛+ ∗
NT *
6 βλ
⎟⎟⎠
⎞⎜⎜⎝
⎛+++⎟
⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛−= µββλβλβλλ
NI
NI
NI
NI *
22
*1
26
*2
24
*1
226&
dengan 0222211110 )0(,)0(,)0(,)0(,)0(,)0(
0000TTIILLIILLSS ======
dan 0)()()()()()( 654321 ====== ffffff tttttt λλλλλλ ..(4.8)
4.3 Analisis Ketunggalan Optimal Control
Analisis ketunggalan optimal control dilakukan dengan memastikan ketunggalan dari solusi Hamiltonian pada persamaan differensial (1.1) karena optimal control yang didapatkan bergantung pada state sistem tersebut. Untuk mengkajinya, dengan memisalkan dua solusi yang berbeda dari Hamilton, kemudian akan ditunjukkan, ternyata solusi tersebut sama.
Untuk memudahkan dalam pengerjaannya, terlebih dahulu akan dilakukan analisis bahwa optimal control (4.5) dan (4.7) memenuhi kondisi Lipschitz. Penyelesaian optimal control dapat dituliskan secara umum ( )( )bcamakscu ,,min)( = , dengan
ba < , untuk ba, adalah konstanta positif. Teorema 4.3 [Jung, 2002] : Fungsi ( )( )bcamakscu ,,min)( = memenuhi kondisi Lipschitz pada c dengan ba < , untuk ba, adalah konstanta positif Bukti: Misalkan 21,cc bilangan real sedemikian hingga
( )( )bcamakscu ,,min)( 11 = ( )( )bcamakscu ,,min)( 22 =
Untuk kemungkinan yang terjadi

1. ( )( ) ( )( )21
2121
0
,,min,,min;,
ccbb
bcamaksbcamakscbacba
−≤=−=
−≤≤≤≤
2. ( )( ) ( )( )212
2121 ,,min,,min;,
cccb
bcamaksbcamaksbcacba
−≤−=
−≤≤≤≤
3. ( )( ) ( )( )
21
2121 ,,min,,min;,
ccab
bcamaksbcamaksbaccba
−≤−=
−≤≤≤≤
4. ( )( ) ( )( )211
2121 ,,min,,min;,
ccbc
bcamaksbcamakscbabca
−≤−=
−≤≤≤≤
5. ( )( ) ( )( )21
2121 ,,min,,min;,
cc
bcamaksbcamaksbcabca
−=
−≤≤≤≤
6. ( )( ) ( )( )211
2121 ,,min,,min;,
ccac
bcamaksbcamaksbacbca
−≤−=
−≤≤≤≤
7. ( )( ) ( )( )
21
2121 ,,min,,min;,
ccba
bcamaksbcamakscbabac
−≤−=
−≤≤≤≤
8. ( )( ) ( )( )212
2121 ,,min,,min;,
ccca
bcamaksbcamaksbcabac
−≤−=
−≤≤≤≤
9. ( )( ) ( )( )21
2121 ,,min,,min;,
ccaa
bcamaksbcamaksbacbac
−≤−=
−≤≤≤≤

Berarti, ( )( )bcamakscu ,,min)( = memenuhi kondisi Lipshitz artinya bentuk optimal control yang didapatkan memenuhi kondisi Lipschitz.
Analisis Ketunggalan Solusi Sistem Persamaan Diferensial
Andaikan ( )6543212211 ,,,,,,,,,,, λλλλλλTILILS dan
( )6543212211 ,,,,,,,,,,, λλλλλλTILILS adalah dua solusi yang berbeda dari sistem persamaan diferensial (4.8) dengan
nemelekejehe
geTfeIdeLceIbeLaeStttttt
tttttt
λλλλλλ
λλλλλλ
λλλλλλ −−−−−− ======
======
654321
2211
,,,,,
,,,,,,
dan
nemelekejehe
geTfeIdeLceIbeLaeStttttt
tttttt
λλλλλλ
λλλλλλ
λλλλλλ −−−−−− ======
======
654321
2211
,,,,,
,,,,,,
untuk 0>λ . Berarti dapat diperoleh bentuk optimal control yang baru.
)),)(1,(min()( 111
11 bbrnjB
amakstu −= ;
( ) )),)(1,(min()( 222
22 bbrnqpqlpjB
amakstu +−+=
Dan
)),)(1,(min()( 111
11 bbrnjB
amakstu −= ;
( ) )),)(1,(min()( 222
22 bbrnqplqjpB
amakstu +−+=
Dengan menggunakan teorema Lipschitz sedemikian hingga dapat diperoleh :
=− )()( 11 tutu

)),)(1,(min()),)(1,(min( 111
1111
1 bbrnjB
amaksbbrnjB
amaks −−−
Atau dapat ditulis
brnjB
brnjB
tutu 11
11
11 )(1)(1)()( −−−≤−
brnjbrnjB 11
1
)()(1−−−= …(4.9)
Dan )),,(min()),,(min()()( 222222 bzamaksbzamakstutu −=−
dengan ( ) crnqpqlpjB
z 22
)(1+−+= dan
( ) crnqplqjpB
z 22
)(1+−+=
atau dapat ditulis
( ) ( ) ))(1))(1)()( 22
22
22 crnqplqjpB
crnqpqlpjB
tutu +−+−+−+≤−
( ) ( ) ))())(122
2
crnqplqjpcrnqpqlpjB
+−+−+−+=
...(4.10)
Kemudian dua solusi tersebut disubstitusikan ke dalam sistem persamaan (1.1). Untuk ( )6543212211 ,,,,,,,,,,, λλλλλλTILILS
aeN
feaeN
ceaedt
ade tt
tt
tt
λλ
λλ
λλ
µββ −−−Λ= ∗1
Sehingga dapat diperoleh :
aeN
feaeN
ceaedt
deadtdae t
tt
tt
tt λ
λλ
λλ
λλ µββ −−−Λ=+ ∗
1
Dengan dtdaa =& dapat ditulis

( ) aeN
feaeN
ceaeaae tt
tt
tt λλ
λλ
λλ µββλ −−−Λ=+ ∗1&
Kedua ruas dibagi dengan teλ sehingga dapat diperoleh
( ) aN
feaN
ceaeaatt
t µββλλλ
λ −−−Λ=+ ∗−1& …(4.11)
Dengan cara sama diperoleh
( ) ( ) cprtubrubkN
ceabbt
221111 )(1)( −+−+−=+ µβλλ
&
Nfeb
Nceg
tt λλ
ββ ∗−+ 2 …(4.12)
( ) crcdbkcc 211 )( −+−=+ µλ& …(4.13)
( ) ( )N
fegbadkcqrtuddtλ
βµλ )()()(1 222 ++++−−=+ ∗& …(4.14)
( ) fddkff )( 22 +−=+ µλ& …(4.15)
( ) ( )[ ]N
cegcrqptubrtuggtλ
βλ 22111 )()(11)( −+−−+=+&
g
Nfeg
t
µβλ
−− ∗
…(4.16)
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−−⎟⎟
⎠
⎞⎜⎜⎝
⎛++−=+− ∗
Ncej
Nfe
Ncehhh
ttt λλλ
βµββλ 11&
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
Nfel
tλ
β * …(4.17)
( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−−−−⎟⎟
⎠
⎞⎜⎜⎝
⎛+++−=+− ∗∗
Nfelkk
Nfertukjjj
tt λλ
ββµλ 1111 )((&
( )11 )( rtun −−
…(4.18)
( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛+−−−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−=+−
Ngeprtu
Naej
Naehkk
ttt λλλ
βββλ 22211 )(1&
( ) ( )2221 ))(1(( qrtudrdk −−−++− µ
( )[ ] ⎟⎟
⎠
⎞⎜⎜⎝
⎛++−−−−
Ngerqptun
tλ
β 222 ))()(11
…(4.19)
( ) ( ) ( )22 kmklell t −−+−=+− µλ λ& …(4.20)
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛ ++−⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟⎠
⎞⎜⎜⎝
⎛−=+− ∗∗∗
Ngebeael
Nbej
Naehemm
tttttt
λλλλλλ βββλ&
( ) ⎟⎟
⎠
⎞⎜⎜⎝
⎛−+− ∗
Ngendm
tλ
βµ 2
…(4.21)
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛++−⎟⎟
⎠
⎞⎜⎜⎝
⎛−=+− µβββλ
λλλ
Nfe
Ncen
Nfelnn
ttt
222&
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
Ncej
tλ
β2 …(4.22)
Untuk ( )6543212211 ,,,,,,,,,,, λλλλλλTILILS
( ) aN
feaN
ceaeaatt
t µββλλλ
λ −−−Λ=+ ∗−1
&
…(4.23)
( ) ( ) cprtubrtubkN
ceabbt
221111 )(1)()( −+−+−=+ µβλλ
&
Nfeb
Nceg
tt λλ
ββ ∗−+ 2 …(4.24)
( ) crcdbkcc 211 )( −+−=+ µλ& …(4.25)
( ) ( ) dkcqrtudd )()(1 222 +−−=+ µλ&
Nfegba
tλ
β )( +++ ∗
…(4.26)
( ) fddkff )( 22 +−=+ µλ& …(4.27)
( ) ( )[ ]
Ncegcrqptubrtugg
tλ
βλ 22111 )()(11)( −+−−+=+&
g
Nfeg
t
µβλ
−− ∗
…(4.28)
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−−⎟⎟
⎠
⎞⎜⎜⎝
⎛++−=+− ∗
Ncej
Nfe
Ncehhh
ttt λλλ
βµββλ 11&
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
Nfel
tλ
β *
…(4.29)
( ) ( )1111 )(( kkN
fertukjjjt
−−⎟⎟⎠
⎞⎜⎜⎝
⎛+++−=+− ∗
λ
βµλ&
( )11 )( rtun
Nfel
t
−−⎟⎟⎠
⎞⎜⎜⎝
⎛−− ∗
λ
β …(4.30)
( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛+−−−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−=+−
Ngeprtu
Naej
Naehkk
ttt λλλ
βββλ 22211 )(1&
( ) ( )2221 ))(1(( qrtudrdk −−−++− µ
( )[ ] ⎟⎟⎠
⎞⎜⎜⎝
⎛++−−−−
Ngerqptun
tλ
β222 ))()(11
…(4.31)
( ) ( ) ( )22 kmklell t −−+−=+− µλ λ& …(4.32)
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛ ++−⎟⎟
⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛−=+− ∗∗∗
Ngbael
Nbej
Naehemm t
ttt βββλ λ
λλλ&
( ) ⎟⎟
⎠
⎞⎜⎜⎝
⎛−+− ∗
Ngendm
tλ
βµ 2 …(4.33)
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛++−⎟⎟
⎠
⎞⎜⎜⎝
⎛−=+− µβββλ
λλλ
Nfe
Ncen
Nfelnn
ttt
222&

⎟⎟⎠
⎞⎜⎜⎝
⎛−−
Ncej
tλ
β 2 …(4.34)
Kemudian dilakukan estimasi/pengurangan pada persamaan (4.11) dan (4.23)
( ) ( ) aN
feaN
ceaeaaaatt
t µββλλλλ
λ −−−Λ=+−+ ∗−1
&&
⎟⎟⎠
⎞⎜⎜⎝
⎛−−−Λ− ∗− a
Nfea
Nceae
ttt µββ
λλλ
1
Atau
( ) ( ) aaaaaa µµλ +−=−+− &&
⎟⎟⎠
⎞⎜⎜⎝
⎛++−−+ ∗∗
Nfea
Ncea
Nfea
Ncea
tttt λλλλ
ββββ 11
Kedua ruas dikalikan dengan ( )aa − sehingga menjadi ( )( ) ( ) ( ) ( )aaaaaaaaaaaa −+−−=−+−− µµλ 2&&
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛++−−−+ ∗∗
Nfea
Ncea
Nfea
Nceaaa
tttt λλλλ
ββββ 11
Setelah itu, kedua ruas diintegralkan dari 0 sampai ft
( )( ) ( )( ) ( )( ) ( )∫∫ ⎟⎟⎠
⎞⎜⎜⎝
⎛+−−+−+−=−+−−
ff t ttt
Ncea
Nceaaaaaaadtaaaaaa
011
0
2λλ
ββµµλ&&
( ) dtN
feaN
feaaatt
⎟⎟⎠
⎞⎜⎜⎝
⎛+−−+ ∗∗
λλ
ββ
Dilain pihak
( )( ) ( )∫ ∫ +−−=−−f ft t
dtaaaaaaaadtaaaa0 0
&&&&&&

Dengan teknik integral parsial , ∫ ∫−= vduuvudv dapat
diperoleh ( )( ) ( ) ( )( )∫ ∫ −−−+−=−−
f ft tf dtaaaa
taaaadtaaaa
0 0
22
02 &&&&
Kedua ruas ditambahkan dengan ( )( )∫ −−ft
dtaaaa0
&&& menjadi
( )( ) ( )∫ −=−−ft
ftaadtaaaa
0
2
02 &&&
atau bisa dinyatakan dengan
( )( ) ( )∫ −=−−ft
ftaadtaaaa
0
2
021
&&&
Namun, 0)0()0( SSS == maka dapat diperoleh )0()0( aa = . Jadi,
( )( ) ( )∫ −−=−−ft
ftaadtaaaa0
2 0)(21
&&&
( ) )(21 2
ftaa −=
Dengan demikian,
( ) ( ) ( )( )∫∫ −−=−+−ff tt
f aaaadtaataa00
22 )(21 µµλ
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛+−−+
Ncea
Nceaaa
tt λλ
ββ 11
( ) dtN
feaN
feaaatt
⎟⎟⎠
⎞⎜⎜⎝
⎛+−−+ ∗∗
λλ
ββ
Mengingat lama perawatan dibatasi pada selang waktu tertentu maka solusi yang dihasilkan pada sistem Hamiltonian adalah

terbatas, berarti terdapat suatu konstanta positif iw sedemikian hingga
( )( ) ∫∫ −≤−−ff tt
dtaawdtaaaa0
21
0
)(µµ
( ) ( )∫∫ −+−≤−⎟⎟⎠
⎞⎜⎜⎝
⎛+−
f
f
f tt
t tt
dtccaaewdtaaN
ceaN
cea0
222
011 )()(λ
λλ
ββ
( ) ( )∫∫ −+−≤−⎟⎟⎠
⎞⎜⎜⎝
⎛+− ∗∗
f
f
f tt
t tt
dtffaaewdtaaN
feaN
fea0
223
0
)()(λλλ
ββ
sehingga diperoleh :
( ) ( ) ∫∫ −≤−+−ff tt
f dtaawdtaataa0
21
0
22 )()(21 λ
( )∫ −+−+f
f
tt dtccaaew
0
222 )()(λ
( )∫ −+−+f
f
tt dtffaaew
0
223 )()(λ
∫∫ −++−≤f
f
f tt
t
dtaaewwdtaaw0
232
0
21 )()()( λ
∫∫ −+−+f
f
f
f
tt
tt dtffewdtccew
0
23
0
22 )()( λλ
sehingga terdapat suatu konstanta positif 1z
( ) ( ) ∫∫ −≤−+−ff tt
f dtaawdtaataa0
21
0
22 )()(21 λ
( )∫ −+−+−+f
f
tt dtffccaaez
0
2221 )()()(λ
Demikian juga pada pengurangan yang lain, yaitu :

( ) ( ) dtbbN
ceaN
ceadtbbtbbff t ttt
f ∫∫ −⎟⎟⎠
⎞⎜⎜⎝
⎛−=−+−
011
0
22)()(
21 λλ
ββλ
( )
∫
∫
∫
−⎟⎟⎠
⎞⎜⎜⎝
⎛−+
−⎟⎟⎠
⎞⎜⎜⎝
⎛−+
−+−++
∗∗f
f
f
t tt
t tt
t
dtbbN
febN
feb
dtbbN
cegN
ceg
dtbbbkbk
0
022
011
)(
)(
)()()(
λλ
λλ
ββ
ββ
µµ
( ) ( )( )
( )∫
∫
−−+
−−−−+
f
f
t
t
dtbbbrtubrtu
dtbbcprtucprtu
01111
02222
)()()(
)()(1)(1
Untuk ( )∫ −−ft
dtbbbrtubrtu0
1111 )()()( dan
( ) ( )( )∫ −−−−ft
dtbbcprtucprtu0
2222 )()(1)(1 digunakan sifat pada
Persamaan (4.2.8) dan (4.2.9) diperoleh
( ) ( )( )
( )∫
∫
−+−+−+−+−≤
−−−−
f
f
t
t
dtnnlljjccbbw
dtbbcprtucprtu
0
222228
02222
)()()()()(
)()(1)(1
( ) ( )∫∫ −+−+−≤−−ff tt
dtnnjjbbwdtbbbrtubrtu0
2229
01111 )()()()()()(
Sehingga diperoleh :

( ) ( ) ( )∫∫ −+−+−≤−+−f
f
f tt
t
f dtccbbaaewdtbbtbb0
2224
0
22)()()()(
21 λλ
( )∫∫ −+−+−+−+
f
f
f tt
t
dtggccbbewdtbbw0
2226
0
25 )()()()( λ
( )
)dtnnlljjcc
bbwdtffbbewff
f
ttt
22220
28
0
227
)()()()(
)(()()(
−+−+−+−+
−+−+−+ ∫∫λ
( )∫ −+−+−+
ft
dtnnjjbbw0
2229 )()()(
(∫ −+−++−+−++≤ft
llwjjwwccwbbwww0
28
298
28
2985 )())(()())((
)dtnnww 2
98 ))(( −++
(∫ −+−++−+++−+f
f
tt ffwccwwbbwwwaawe
0
27
264
2764
24 )())(())(()(λ
)dtggw 26 )( −+
Sehingga terdapat suatu konstanta positif 2z , 3z
( ) ( ) ( )∫∫ −+−+−+−+−≤−+−ff tt
f dtnnlljjccbbzdtbbtbb0
222222
0
22 )()()()()()(21 λ
( )dtggffccbbaaezf
f
tt ∫ −+−+−+−+−+
0
222223 )()()()()(λ
( ) ( ) ∫∫∫ −−+++−−=−+−fff ttt
f dtccccrddtccbbkdtcctcc0
210
110
22 ))()(())(()(21 µλ
( ) ∫∫ −+−+−≤ff tt
dtccwdtccbbw0
211
0
22110 )()()(
Sehingga terdapat suatu konstanta positif 4z
( ) ( ) ( )∫∫ −+−≤−+−ff tt
f dtccbbzdtcctcc0
2214
0
22 )()()(21 λ
( ) ( ) ( ) ( )( )∫∫ −−−−=−+−ff tt
f dtddcqrtucqrtudtddtdd0
22220
22 )()(1)(1)(21 λ
∫ −−++ft
dtddddk0
2 ))()((µ
∫ −⎟⎟
⎠
⎞⎜⎜⎝
⎛++−+++ ∗∗
ft tt
dtddN
fegbaN
fegba0
)()()(λλ
ββ
( )∫ −+−+−+−+−≤ft
dtnnlljjddccw0
2222212 )()()()()(
∫ −+ft
dtddw0
213 )(
( )∫ −+−+−+−+−+f
f
tt dtggffddbbaaew
0
2222214 )()()()()(λ
( )∫ −+−+−+−++−≤ft
dtnnwllwjjwddwwccw0
212
212
212
21312
212 )()()())(()(
( )∫ −+−+−+−+−+f
f
tt dtggffddbbaaew
0
2222214 )()()()()(λ
Sehingga terdapat suatu konstanta positif 5z
( ) ( ) ( )∫∫ −+−+−+−+−≤−+−ff tt
f dtnnlljjddcczdtddtdd0
222225
0
22 )()()()()()(21 λ

( )∫ −+−+−+−+−+f
f
tt dtggffddbbaaew
0
2222214 )()()()()(λ
( ) ( ) ∫∫∫ −−++−−=−+−fff ttt
f dtffffddtffddkdtfftff0
20
20
22 ))()(())(()(21 µλ
( ) ∫∫ −+−+−≤ff tt
dtffwdtffddw0
216
0
2215 )()()(
( )∫ −++−≤ft
dtffwwddw0
21615
215 ))(()(
Sehingga terdapat suatu konstanta positif 6z
( ) ( ) ( )∫∫ −+−≤−+−ff tt
f dtffddzdtfftff0
226
0
22 )()()(21 λ
( ) ( ) ( )∫∫ −−=−+−ff tt
f dtggbrtubrtudtggtgg0
11110
22 )()()()(21 λ
( ) ( )( )∫ −+−++ft
dtggcrqptucrqptu0
2121 )())()())()(
∫ −⎟⎟⎠
⎞⎜⎜⎝
⎛−+
ft tt
dtggN
cegN
ceg0
22 )(λλ
ββ
∫∫ −−+−⎟⎟⎠
⎞⎜⎜⎝
⎛−+ ∗∗
ff tt tt
dtggggdtggN
fegN
feg00
))(()( µββλλ
( )∫ −+−+−+−≤ft
dtnnjjggbbw0
222217 )()()()(

( )∫ −+−+−+−+−+ft
dtnnjjggccbbw0
2222218 )()()()()(
( )∫ −+−+f
f
tt dtggccew
0
2219 )()(λ
( ) ∫∫ −+−+−+ff
f
ttt dtggwdtggffew
0
221
0
2220 )()()(λ
(∫ −+++−+−+≤ft
ggwwwccwbbww0
2211817
218
21817 ))(()())((
)dtnnwwjjww 21817
21817 ))(())(( −++−++
( )∫ −++−+−+f
f
tt dtggwwffwccwe
0
22019
220
219 ))(()()(λ
Sehingga terdapat suatu konstanta positif 87 , zz
( ) ( ) ( )∫∫ −+−+−+−+−≤−+−ff tt
f dtnnjjggccbbzdtggtgg0
222227
0
22 )()()()()()(21 λ
( )∫ −+−+−+f
f
tt dtggffccez
0
2228 )()()(λ
Kemudian, untuk 0)()()()()()( 654321 ====== ffffff tttttt λλλλλλ
maka
0)()()()(
)()()()()()()()(
=====
=======
ffff
ffffffff
tntntmtm
tltltktktjtjthth
sehingga pengurangan untuk persamaan adjoin diperoleh :

( ) ( ) ∫∫ −⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛++−⎟⎟
⎠
⎞⎜⎜⎝
⎛++=−+− ∗∗
ff t ttttt
dthhNfe
Nceh
Nfe
Ncehdthhhh
011
0
22 )()0(21 µββµββλ
λλλλ
dthh
Ncej
Ncej
ft tt
)(0
11 −⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−+ ∫
λλ
ββ
∫ −
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−+
ft tt
dthhN
felN
fel0
** )(λλ
ββ
( )
( )∫
∫
−+−+−+
−+−+−≤
f
f
f
tt
t
dtjjhhccew
dthhffccw
0
22223
0
22222
)()()(
)()()(
λ
( )∫ −+−+−+
f
f
tt dtllhhffew
0
22224 )()()(λ
( ) (∫∫ −+−+−+−+−≤f
f
f tt
t
ffwccwedthhffccw0
223
223
0
22222 )()()()()( λ
223
22423 )())(( jjwhhww −+−++ )dtllw 2
24 )( −+ Sehingga terdapat suatu konstanta positif 9z
( ) ( ) ( )
( )∫
∫∫
−+−+−+−+−+
−+−+−≤−+−
f
f
ff
tt
tt
dtlljjhhffccez
dthhffccwdthhhh
0
222229
0
22222
0
22
)()()()()(
)()()()0(21
λ
λ
( ) ( )
( ) ( )( ) dtjjN
felN
feldtjjkkkk
dtjjN
fertukjN
fertukj
dtjjjj
ff
f
f
t ttt
t tt
t
∫∫
∫
∫
−⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−+−−−−+
−⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+++−⎟⎟
⎠
⎞⎜⎜⎝
⎛+++=
−+−
∗∗
∗∗
0011
0111111
0
22
)()(
)()(()((
)0(21
λλ
λλ
ββ
βµβµ
λ
( ) ( )( )∫ −−−−+ft
dtjjrtunrtun0
1111 )()()(
( ) ( )∫∫ −+−+−+−+−+−+ff
f
ttt dtnnjjbbwdtlljjffew
0
22228
0
22227 )()()()()()(λ
(∫ −+−++−+−+≤ft
kkwjjwwffwbbww0
226
22825
225
22825 )())(()())((
) ( )∫ −+−+−+−++f
f
tt dtlljjffewdtnnww
0
22227
22825 )()()())(( λ
Sehingga terdapat suatu konstanta positif 10z
( ) ( ) ( )∫∫ −+−+−+−+−≤−+−ff tt
dtnnkkjjffbbzdtjjjj0
2222210
0
22 )()()()()()0(21 λ
( )∫ −+−+−+f
f
tt dtlljjffew
0
22227 )()()(λ
( ) ( ) ∫∫ −⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟⎠
⎞⎜⎜⎝
⎛=−+−
ff t ttt
dtkkN
aehN
aehdtkkkk0
110
22 )()0(21 λλ
ββλ

( ) ( )∫ −⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+−−−−⎟⎟
⎠
⎞⎜⎜⎝
⎛+−−−+
ft tttt
dtkkNgeprtu
Naej
Ngeprtu
Naej
022212221 )()(1)(1
λλλλ
ββββ
( ) ( )( )
( ) ( )( )∫
∫
−−−−−−+
−++−+++
f
f
t
t
dtkkqrtulqrtul
dtkkrdkrdk
02222
02121
)())(1())(1(
)((( µµ
( )[ ] ( )[ ]∫ −⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛++−−−−⎟⎟
⎠
⎞⎜⎜⎝
⎛++−−−+
ft tt
dtkkNgerqptun
Ngerqptun
0222222 )())()(11))()(11
λλ
ββ
( ) (∫∫ −+−+−+−+−+−≤ff
f
ttt ggbbaawdtkkhhaaew
0
22229
0
22228 )()()()()()(λ
) (∫∫ −+−+−+−+−+−+ff tt
bbwdtkkwdtnnllkkjj0
231
0
230
2222 )()()()()()(
) (∫ −+−+−+−+−+−+−+ft
jjggbbwdtnnllkkjj0
22232
2222 )()()()()()()(
)dtnnllkk 222 )()()( −+−+−+
( ) (∫∫ −+−+−+−+−≤ff
f
ttt bbwaawdtkkhhaaew
0
229
229
0
22228 )()()()()(λ
2323129
23229
23231 ))(())(())(( jjwwwggwwbbww −+++−++−+
2323129
232313029 ))(())(( llwwwkkwwww −+++−++++
)dtnnwww 2323129 ))(( −+++
Sehingga terdapat suatu konstanta positif 11z

( ) ( ) ( )∫∫ −+−+−≤−+−f
f
f tt
t
dtkkhhaaewdtkkkk0
22229
0
22 )()()()0(21 λλ
( )dtnnllkkjjggbbaazft
∫ −+−+−+−+−+−+−+0
222222211 )()()()()()()(
( ) ( ) ( ) ( )( )∫∫ −+−+=−+−ff tt
dtllklkldtllll0
220
22 )()0(21 µµλ
( ) ( )( )∫ −−−−+ft
dtllkmkm0
22 )(
( )∫∫ −+−+−≤ff tt
dtmmllwllw0
2234
0
233 )()()(
( )∫ −+−+≤ft
dtmmwllww0
234
23433 )())((
Sehingga terdapat suatu konstanta positif 12z
( ) ( ) ( )∫∫ −+−≤−+−ff tt
dtmmllzdtllll0
2212
0
22 )()()0(21 λ
( ) ( ) ∫∫ −⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟⎠
⎞⎜⎜⎝
⎛=−+− ∗∗
t ttt
dtmmN
aehN
aehdtmmmmf
00
22 )()0(21 λλ
ββλ
∫
∫
−⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ ++
−⎟⎟⎠
⎞⎜⎜⎝
⎛ +++
−⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟⎠
⎞⎜⎜⎝
⎛+
∗∗
∗∗
f
f
ttt
t tt
dtmmN
gbaleN
gbael
dtmmN
bejN
bej
0
0
)(
)(
ββ
ββ
λλ
λλ

( ) ( )( )
∫
∫
−⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛+
−+−++
∗∗f
f
t tt
t
dtmmN
genN
gen
dtmmdmdm
0
022
)(
)(
λλ
ββ
µµ
( ) ( )∫∫ −+−+−+−+−+−≤f
f
f
f
tt
tt dtmmjjbbewdtmmhhaaew
0
22236
0
22235 )()()()()()( λλ
( )
( )∫∫
∫
−+−+−+−+
−+−+−+−+−+
f
f
f
f
f
tt
t
tt
dtnnmmggewdtmmw
dtmmllggbbaaew
0
22239
0
238
0
2222237
)()()()(
)()()()()(
λ
λ
( )∫ −+−+−+f
f
tt dtnnmmggew
0
22239 )()()(λ
(∫∫ −++−++−≤f
f
f tt
t
bbwwaawwedtmmw0
23735
23735
0
238 ))(())(()( λ
237
236
235
23937 )()()())(( llwjjwhhwggww −+−+−+−++
)dtnnwmmwww 239
2383736 )())(( −+−+++
Sehingga terdapat suatu konstanta positif 13z
( ) ( ) (∫∫∫ −+−≤−+−f
f
ff tt
tt
aaezdtmmwdtmmmm0
213
0
238
0
22 )()()0(21 λλ
)dtnnmmlljjhhggbb 2222222 )()()()()()()( −+−+−+−+−+−+−+
( ) ( ) ∫∫ −⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−=−+−
ff t ttt
dtnnN
cejN
cejdtnnnn0
220
22 )()0(21 λλ
ββλ
∫
∫
−⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛++−⎟⎟
⎠
⎞⎜⎜⎝
⎛+++
−⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟⎠
⎞⎜⎜⎝
⎛+
f
f
t tttt
t tt
dtnnN
feN
cenN
feN
cen
dtnnN
felN
fel
02222
022
)(
)(
µββµββ
ββ
λλλλ
λλ
( ) ( )∫∫ −+−+−+−+−+−≤f
f
f
f
tt
tt dtnnllffewdtnnjjccew
0
22241
0
22240 )()()()()()( λλ
( )∫ −+−+−+ft
dtnnffccw0
22242 )()()(
( )∫ −++−+−+−+−≤f
f
tt dtnnwwllwjjwffwccwe
0
24140
241
240
241
240 ))(()()()()(λ
( )∫ −+−+−+ft
dtnnffccw0
22242 )()()(
Sehingga terdapat suatu konstanta positif 14z
( ) ( ) ( )∫∫ −+−+−+≤−+−ff tt
dtnnffccwdtnnnn0
22242
0
22 )()()()0(21
λ
( )∫ −+−+−+−+−f
f
tt dtnnlljjffccez
0
2222214 )()()()()(λ
Dengan mengkombinasikan hasil pengurangan diatas maka dapat diperoleh
( ) ( ) ( ) ( ) ( ) )(21)(
21)(
21)(
21)(
21 22222
fffff tfftddtcctbbtaa −+−+−+−+−
( ) ( ) ( ) ( ) ( ) )0(21)0(
21)0(
21)0(
21)(
21 22222 llkkjjhhtgg f −+−+−+−+−+
( ) ( ) ( ) ( ) ( )⎢⎢⎣
⎡−+−+−+−+−+ ∫∫∫
fff ttt
ccbbaannmm0
2
0
2
0
222 )0(21)0(
21 λ

( ) ( ) ( ) ( ) ( ) ( )∫∫∫∫∫∫ −+−+−+−+−+−+ffffff tttttt
kkjjhhggffdd0
2
0
2
0
2
0
2
0
2
0
2
( ) ( ) ( ) dtnnmmllfff ttt
⎥⎥⎦
⎤−+−+−+ ∫∫∫
0
2
0
2
0
2
(∫ −+−+−+−+−+−⎟⎠⎞⎜
⎝⎛ +≤
f
f
tt ggffddccbbaaezz
0
22222221 )()()()()()(λ
)dtnnmmllkkjjhh 222222 )()()()()()( −+−+−+−+−+−+
Sehingga
( ) (∫ −+−+−+−+−+−−−f
f
tt ggffddccbbaaezz
0
22222221 )()()()()()(λλ
) 0)()()()()()( 222222 ≤−+−+−+−+−+−+ dtnnmmllkkjjhh Berarti
021 <−− ftezz λλ . Jika dipilih 21 zz +>λ maka
⎟⎟⎠
⎞⎜⎜⎝
⎛ −<
2
11z
zt fλ
λ. Oleh karena itu, haruslah
,0,0,0,0,0,0,0,0,0 =−=−=−=−=−=−=−=−=− kkjjhhggffddccbbaa0,0,0 =−=−=− nnmmll , sehingga didapatkan
,,,,,,,,,,, mmllkkjjhhggffddccbbaa ===========nn = . Jadi , solusi dari sistem adalah tunggal pada interval
kecil. 4.4 Simulasi Numerik
Strategi penanganan optimal diperoleh dengan memecahkan sistem optimalitas, terdiri atas 12 ODE dari persamaan keadaan dan adjoin. Metode iterasi dipakai untuk memecahkan sistem optimalitas. Dimulai dengan memecahkan model sistem dengan memperkirakan kontrol pada waktu yang disimulasikan dengan menggunakan skema beda hingga maju. Karena adanya kondisi
transversalitas, persamaan adjoin dipecahkan dengan skema beda hingga mundur dengan menggunakan solusi iterasi arus persamaan keadaan. Solusi pada model sistem dengan menggunakan skema Beda Hingga adalah sebagai berikut :
Persamaan state diselesaikan dengan menggunakan metode beda hingga maju.
12
11
111
++∗
++ −−−Λ=−
i
i
i
i
iii S
NIS
NIS
hSS
µββ
iiiiii
i
ii
IprtuLrtuLkNIS
hLL
1221
1111
111
111
11 ))(1()()( −+−+−=− ++
+
+
µβ
NIL
NIT
ii
i
i21
11
2+∗−+ ββ
112
111
111
11
1 )( ++++
−+−=− iii
ii
IrIdLkh
IIµ
NI
TLSLkIqrtuh
LL i
ii
iiii
ii21
111
221
1222
12 )()())(1( ++++−−=
− ++
∗+++
βµ
122
122
21
2 )( +++
+−=− ii
ii
IdLkh
IIµ
NITIrqptuLrtu
hTT i
iiiiiii
11
121
1221
1111 ))))((1(1()(
+
++++ −+−−+=
−β
1
12
1 +
+
+∗ −− i
i
i TN
IT µβ
Persamaan adjoin diselesaikan dengan menggunakan metode beda hingga mundur.
⎟⎟⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛++=
− +−
+∗
+−−
−−−
NI
NI
NI
h
iin
iiin
inin 11
12
12
11
11
1
111 βλµββλλλ
⎟⎟⎠
⎞⎜⎜⎝
⎛−+
+−
NI i
in1
2*4 βλ
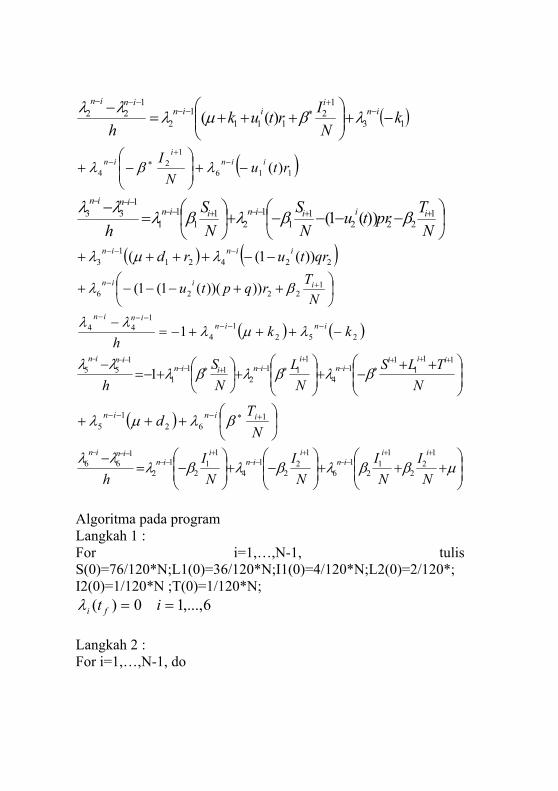
( )13
12
1111
2
122 )(( k
NIrtuk
hin
iiin
inin
−+⎟⎟⎠
⎞⎜⎜⎝
⎛+++=
− −+
∗−−−−−
λβµλλλ
( )116
12
4 )( rtuN
I iini
in −+⎟⎟⎠
⎞⎜⎜⎝
⎛−+ −
+∗− λβλ
⎟⎠⎞
⎜⎝⎛ −−−−+⎟
⎠⎞
⎜⎝⎛=
− ++−−+−−−−−
NT
prtuN
SN
Sh
iiiiniininin
1222
11
12
11
11
133 ))(1( ββλβλλλ
( ) ( )22421
13 ))(1(( qrturd iinin −−++++ −−− λµλ
⎟⎠⎞
⎜⎝⎛ ++−−−+ +−
NTrqptu iiin 1
2226 ))))((1(1( βλ
( ) ( )2521
4
144 1 kk
hinin
inin
−+++−=− −−−
−−−
λµλλλ
⎟⎟⎠
⎞⎜⎜⎝
⎛ ++−+⎟
⎟⎠
⎞⎜⎜⎝
⎛+⎟⎠⎞
⎜⎝⎛+−=
− +++∗−−
+∗−−+∗−−
−−−
NTLS
NL
NS
h
iiiin
iiniin
inin 111
11
4
111
211
1
155 1 βλβλβλλλ
( ) ⎟⎠⎞
⎜⎝⎛+++ +∗−−−
NT
d iinin 162
15 βλµλ
⎟⎟⎠
⎞⎜⎜⎝
⎛+++⎟
⎟⎠
⎞⎜⎜⎝
⎛−+⎟
⎟⎠
⎞⎜⎜⎝
⎛−=
− ++−−
+−−
+−−
−−−
µββλβλβλλλ
NI
NI
NI
NI
h
iiin
iin
iin
inin 12
2
11
21
6
12
21
4
11
21
2
166
Algoritma pada program Langkah 1 : For i=1,…,N-1, tulis S(0)=76/120*N;L1(0)=36/120*N;I1(0)=4/120*N;L2(0)=2/120*; I2(0)=1/120*N ;T(0)=1/120*N;
6,...,10)( == it fiλ Langkah 2 : For i=1,…,N-1, do
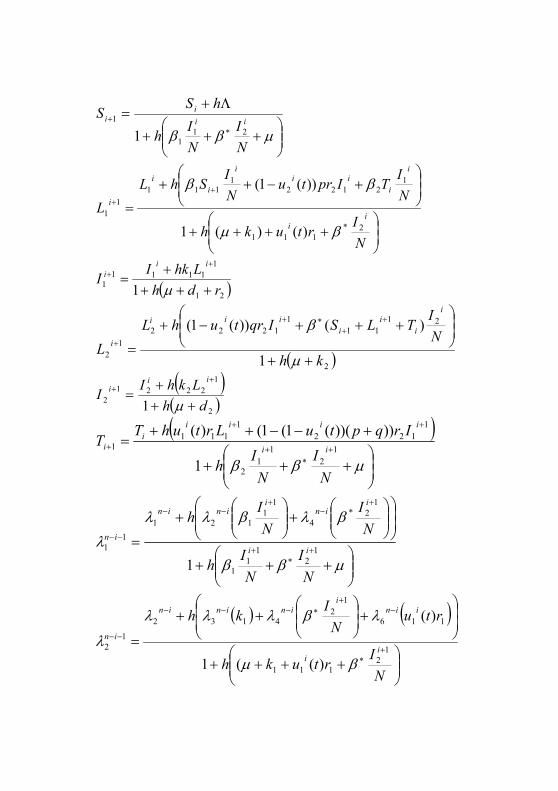
⎟⎟⎠
⎞⎜⎜⎝
⎛+++
Λ+=
∗+
µββNI
NI
h
hSS
iii
i21
1
1
1
⎟⎟⎠
⎞⎜⎜⎝
⎛++++
⎟⎟⎠
⎞⎜⎜⎝
⎛+−++
=+
+
NI
rtukh
NI
TIprtuNI
ShLL
ii
i
iii
i
ii
i
2*111
12122
1111
11
)()(1
))(1(
βµ
ββ
( )21
11111
1 1 rdhLhkII
iii
++++
=+
+
µ
( )2
2111
11222
12 1
)())(1(
khNI
TLSIqrtuhLL
i
ii
iiii
i
++
⎟⎟⎠
⎞⎜⎜⎝
⎛+++−+
=
++
∗+
+
µ
β
( )( )2
12221
2 1 dhLkhII
iii
+++
=+
+
µ ( )
⎟⎟⎠
⎞⎜⎜⎝
⎛+++
+−−++=
+∗
+
++
+
µββN
IN
Ih
IrqptuLrtuhTT
ii
iiiii
i 12
11
2
1122
1111
1
1
))))((1(1()(
⎟⎟⎠
⎞⎜⎜⎝
⎛+++
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
=+
∗+
+−
+−−
−−
µββ
βλβλλ
λ
NI
NI
h
NI
NI
h
ii
iin
iinin
in1
21
11
12*
4
11
1211
1
1
( ) ( )
⎟⎟⎠
⎞⎜⎜⎝
⎛++++
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛++
=+
∗
−+
∗−−−
−−
NIrtukh
rtuN
Ikh
ii
iini
ininin
in1
2111
116
12
4132
12
)((1
)(
βµ
λβλλλ
λ

( )21
1222
11
12
11
113
13 1
))(1(
rdhN
Tprtu
NS
NS
h iiiiniinin
in
+++
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ +−++⎟
⎠⎞
⎜⎝⎛−+
=
++−−+−−−
−−
µ
ββλβλλλ
( )( )21
12226224
1
))))((1(1())(1(
rdhN
Trqptuqrtu iiiniin
+++
⎟⎠⎞
⎜⎝⎛ −+−−+−+ +−−
µ
βλλ
( )( )( )2
25414 1
1kh
kh ininin
++++
=−−
−−
µλλ
λ
( )2
111
11
4
111
211
15
15 1
1
dh
NTLS
NL
NS
hiii
ini
iniinin
in
++
⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛ +++⎟⎟⎠
⎞⎜⎜⎝
⎛−+⎟
⎠⎞
⎜⎝⎛−++
=
+++∗−−
+∗−−+∗−−−
−−
µ
βλβλβλλ
λ
( )2
16
1 dhN
Tiin
++
⎟⎟⎠
⎞⎟⎠⎞
⎜⎝⎛−+ +∗−
µ
βλ
⎟⎟⎠
⎞⎜⎜⎝
⎛+++
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛+
=++
+−−
+−−−
−−
µββ
βλβλλ
λ
NI
NI
h
NI
NIh
ii
iin
iinin
in1
22
11
2
12
21
4
11
21
26
16
1
)),)(1,(min( 111
16
12
1
11 bLr
Bamaksu iinini +−−−−+ −= λλ
( ) )),)(1,(min( 112
16
14
12
2
12 bIrqpqp
Bamaksu iininini +−−−−−−+ +−+= λλλ
Langkah 3 For i=1,…,N-1, tulis S*(ti)=Si ; L1*(ti)=L1i;I1 (ti)=I1i ; L2*(ti)=L2i;I2 (ti)=I2i ; T*(ti)=Ti u*(ti)=ui ; end for
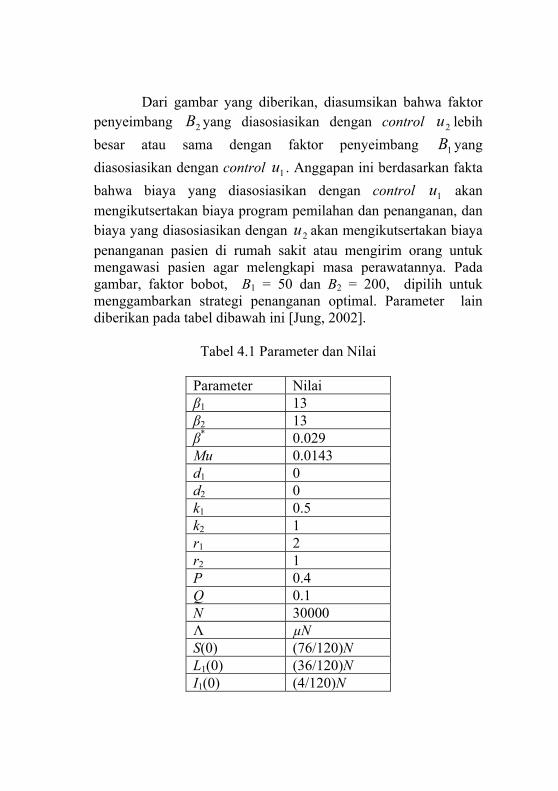
Dari gambar yang diberikan, diasumsikan bahwa faktor penyeimbang 2B yang diasosiasikan dengan control 2u lebih besar atau sama dengan faktor penyeimbang 1B yang diasosiasikan dengan control 1u . Anggapan ini berdasarkan fakta bahwa biaya yang diasosiasikan dengan control 1u akan mengikutsertakan biaya program pemilahan dan penanganan, dan biaya yang diasosiasikan dengan 2u akan mengikutsertakan biaya penanganan pasien di rumah sakit atau mengirim orang untuk mengawasi pasien agar melengkapi masa perawatannya. Pada gambar, faktor bobot, B1 = 50 dan B2 = 200, dipilih untuk menggambarkan strategi penanganan optimal. Parameter lain diberikan pada tabel dibawah ini [Jung, 2002].
Tabel 4.1 Parameter dan Nilai
Parameter Nilai β1 13 β2 13 β* 0.029 Mu 0.0143 d1 0 d2 0 k1 0.5 k2 1 r1 2 r2 1 P 0.4 Q 0.1 N 30000 Λ µN S(0) (76/120)N L1(0) (36/120)N I1(0) (4/120)N
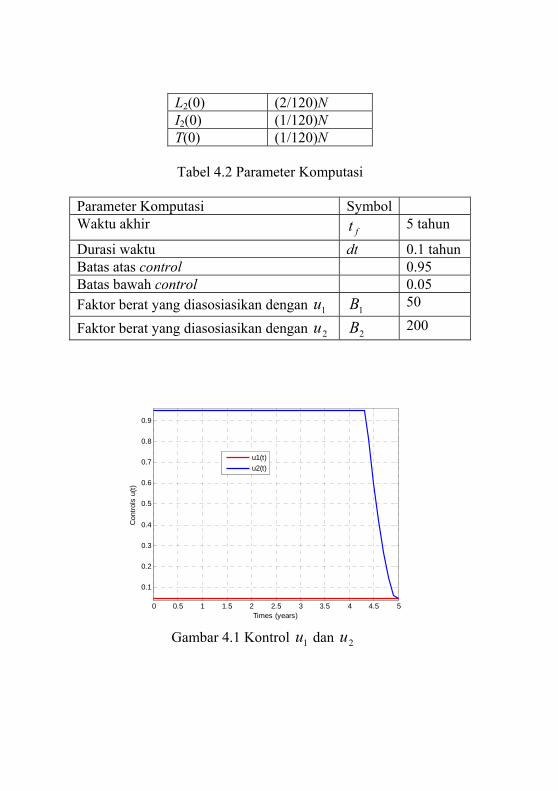
L2(0) (2/120)N I2(0) (1/120)N T(0) (1/120)N
Tabel 4.2 Parameter Komputasi
Parameter Komputasi Symbol Waktu akhir
ft 5 tahun
Durasi waktu dt 0.1 tahun Batas atas control 0.95 Batas bawah control 0.05 Faktor berat yang diasosiasikan dengan 1u 1B 50
Faktor berat yang diasosiasikan dengan 2u 2B 200
Gambar 4.1 Kontrol 1u dan 2u
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Times (years)
Con
trols
u(t)
u1(t)u2(t)
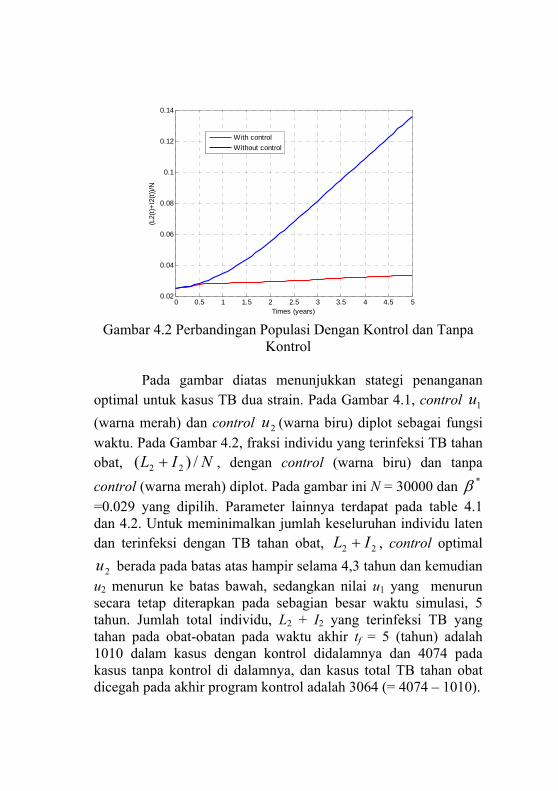
Gambar 4.2 Perbandingan Populasi Dengan Kontrol dan Tanpa
Kontrol
Pada gambar diatas menunjukkan stategi penanganan optimal untuk kasus TB dua strain. Pada Gambar 4.1, control 1u (warna merah) dan control 2u (warna biru) diplot sebagai fungsi waktu. Pada Gambar 4.2, fraksi individu yang terinfeksi TB tahan obat, NIL /)( 22 + , dengan control (warna biru) dan tanpa control (warna merah) diplot. Pada gambar ini N = 30000 dan *β=0.029 yang dipilih. Parameter lainnya terdapat pada table 4.1 dan 4.2. Untuk meminimalkan jumlah keseluruhan individu laten dan terinfeksi dengan TB tahan obat, 22 IL + , control optimal
2u berada pada batas atas hampir selama 4,3 tahun dan kemudian u2 menurun ke batas bawah, sedangkan nilai u1 yang menurun secara tetap diterapkan pada sebagian besar waktu simulasi, 5 tahun. Jumlah total individu, L2 + I2 yang terinfeksi TB yang tahan pada obat-obatan pada waktu akhir tf = 5 (tahun) adalah 1010 dalam kasus dengan kontrol didalamnya dan 4074 pada kasus tanpa kontrol di dalamnya, dan kasus total TB tahan obat dicegah pada akhir program kontrol adalah 3064 (= 4074 – 1010).
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50.02
0.04
0.06
0.08
0.1
0.12
0.14
Times (years)
(L2(
t)+I2
(t))/N
With controlWithout control
( Halaman ini sengaja dikosongkan )

BAB V KESIMPULAN DAN SARAN
Pada bab ini, akan diberikan kesimpulan dari hasil yang
telah didapat setelah melakukan analisis mengenai optimal control dan simulasi numeriknya. Selain itu, memberikan saran pada pembahasan yang telah dilakukan untuk dikaji dengan lebih mendalam.
5.1 Kesimpulan Dari analisis yang dilakukan pada model TB dua strain, maka dapat diperoleh kesimpulan sebagai berikut :
1. Pada analisis control optimal dapat diketahui bahwa : a. Eksistensi optimal control pada model TB dua strain
dapat ditunjukkan, sedemikian hingga dapat dicari optimal control yang meminimalkan performance index yang ingin dicapai.
b. Kontrol TB dua strain adalah
)),)(1,(min()( 1*1162
11
*1 bLr
Bamakstu λλ −=
( ) )),)(1,(min()( 2*
126422
2*
2 bIrqpqpB
amakstu λλλ +−+=
Dimana : u1(t) : mewakili fraksi TB strain 1 pada individu
yang teridentifikasi dan yang akan diberikan perawatan.
1-u2(t): usaha yang mencegah kegagalan perawatan pada penderita TB strain 2 yang menular
p+q : proporsi mereka yang dirawat karena menderita TB tersebut dan tidak menyempurnakan perawatan (p + q ≤ 1).
B1 , B2 : faktor penyeimbang biaya.
1L : populasi laten yaitu populasi terinfeksi dengan TB strain 1, tetapi belum menularkan.
I1 : populasi yang terinfeksi TB strain 1 2,1,10 =<≤≤≤ ibua iii
c. Optimal control yang diperoleh pada model TB dua strain mempunyai bentuk yang tunggal pada interval waktu yang kecil.
2. Hasil perhitungan numerik menunjukkan keefektifan kontrol yang ada bisa mengurangi jumlah penderita TB dua strain.
5.2 Saran Adapun saran dari Tugas Akhir ini adalah dapat dicari kontrol untuk penyakit yang lain, sehingga juga dapat meminimalkan atau mengurangi jumlah penderita penyakit tersebut.

DAFTAR PUSTAKA
Centre for Disease Control. 1991. Division of Tuberculosis Eliminitio. CDC, Unpublished data.
Chaulet, P. 1983. Treatment of Tuberculosis: Case holding Until Cure. WHO/TB/83. Word Healt Organization, Geneva, 141.
Chavez, C., and Z. Feng. 1997. To Treat Or Not To Treat : The Case of Tuberculosis. J. Mathematical Biology, 35, 629-659.
Fleming, W.H., and Rishel, R.W. 1975. Deterministic And Stochastic Optimal Control. Springer, Verlag, New York.
Jung, E., Lenhart, S., and Feng, Z. 2002. Optimal Control Of Treatment In A Two-Strain Tuberculosis Model. Discrete And Continuous Dynamical Sistems Series B Volume 2 number 4”., pp. 473-482.
Lewis, F. 1986. Optimal Control. Georgia : School Of Enginering Georgia Institute of Technology Atlanta.
Pontryagin, L.S , Boltyanskii, V. G, Gamkrelidze, R. V, and Mishchenko, E.F. 1962. The Mathematical Theory Of Optimal Processe. Wiley, New York.
Reichman, L.B., and Hershfield, E.S. 2000. Tuberculosis A Comprehensive International Appoarch. Dekker, New York
Subiono. 2008. Modul Ajar Matematika Sistem. Matematika, Institut Teknologi Sepuluh Nopember, Surabaya.
WHO. 2000. Tuberculosis Strategy and Operation, < www.who.int/gtb/dots >
( Halaman ini sengaja dikosongkan )
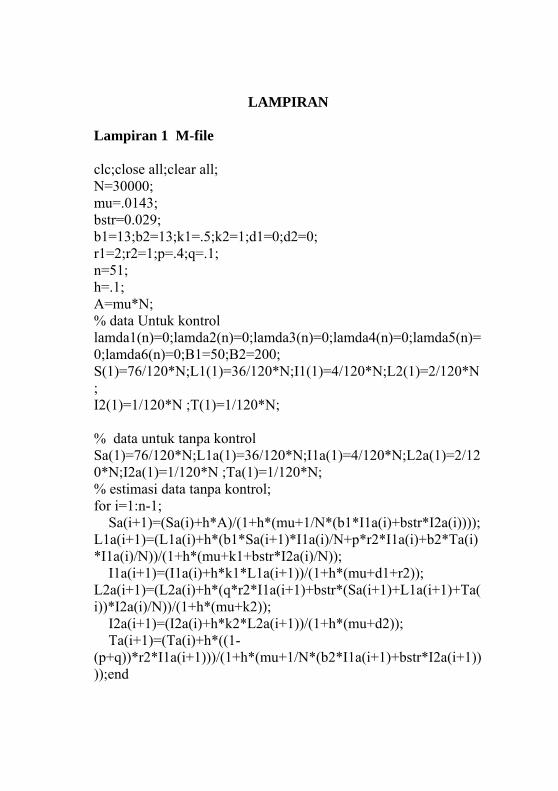
LAMPIRAN Lampiran 1 M-file clc;close all;clear all; N=30000; mu=.0143; bstr=0.029; b1=13;b2=13;k1=.5;k2=1;d1=0;d2=0; r1=2;r2=1;p=.4;q=.1; n=51; h=.1; A=mu*N; % data Untuk kontrol lamda1(n)=0;lamda2(n)=0;lamda3(n)=0;lamda4(n)=0;lamda5(n)=0;lamda6(n)=0;B1=50;B2=200; S(1)=76/120*N;L1(1)=36/120*N;I1(1)=4/120*N;L2(1)=2/120*N; I2(1)=1/120*N ;T(1)=1/120*N; % data untuk tanpa kontrol Sa(1)=76/120*N;L1a(1)=36/120*N;I1a(1)=4/120*N;L2a(1)=2/120*N;I2a(1)=1/120*N ;Ta(1)=1/120*N; % estimasi data tanpa kontrol; for i=1:n-1; Sa(i+1)=(Sa(i)+h*A)/(1+h*(mu+1/N*(b1*I1a(i)+bstr*I2a(i)))); L1a(i+1)=(L1a(i)+h*(b1*Sa(i+1)*I1a(i)/N+p*r2*I1a(i)+b2*Ta(i)*I1a(i)/N))/(1+h*(mu+k1+bstr*I2a(i)/N)); I1a(i+1)=(I1a(i)+h*k1*L1a(i+1))/(1+h*(mu+d1+r2)); L2a(i+1)=(L2a(i)+h*(q*r2*I1a(i+1)+bstr*(Sa(i+1)+L1a(i+1)+Ta(i))*I2a(i)/N))/(1+h*(mu+k2)); I2a(i+1)=(I2a(i)+h*k2*L2a(i+1))/(1+h*(mu+d2)); Ta(i+1)=(Ta(i)+h*((1-(p+q))*r2*I1a(i+1)))/(1+h*(mu+1/N*(b2*I1a(i+1)+bstr*I2a(i+1))));end
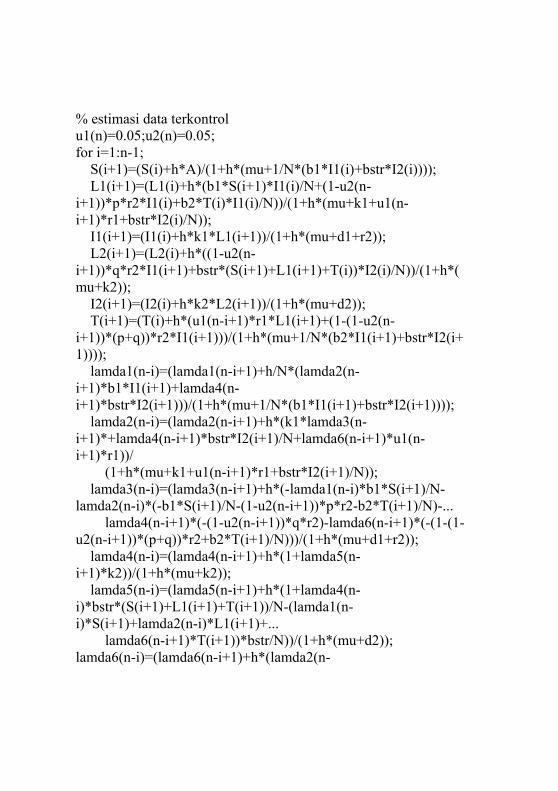
% estimasi data terkontrol u1(n)=0.05;u2(n)=0.05; for i=1:n-1; S(i+1)=(S(i)+h*A)/(1+h*(mu+1/N*(b1*I1(i)+bstr*I2(i)))); L1(i+1)=(L1(i)+h*(b1*S(i+1)*I1(i)/N+(1-u2(n-i+1))*p*r2*I1(i)+b2*T(i)*I1(i)/N))/(1+h*(mu+k1+u1(n-i+1)*r1+bstr*I2(i)/N)); I1(i+1)=(I1(i)+h*k1*L1(i+1))/(1+h*(mu+d1+r2)); L2(i+1)=(L2(i)+h*((1-u2(n-i+1))*q*r2*I1(i+1)+bstr*(S(i+1)+L1(i+1)+T(i))*I2(i)/N))/(1+h*(mu+k2)); I2(i+1)=(I2(i)+h*k2*L2(i+1))/(1+h*(mu+d2)); T(i+1)=(T(i)+h*(u1(n-i+1)*r1*L1(i+1)+(1-(1-u2(n-i+1))*(p+q))*r2*I1(i+1)))/(1+h*(mu+1/N*(b2*I1(i+1)+bstr*I2(i+1)))); lamda1(n-i)=(lamda1(n-i+1)+h/N*(lamda2(n-i+1)*b1*I1(i+1)+lamda4(n-i+1)*bstr*I2(i+1)))/(1+h*(mu+1/N*(b1*I1(i+1)+bstr*I2(i+1)))); lamda2(n-i)=(lamda2(n-i+1)+h*(k1*lamda3(n-i+1)*+lamda4(n-i+1)*bstr*I2(i+1)/N+lamda6(n-i+1)*u1(n-i+1)*r1))/ (1+h*(mu+k1+u1(n-i+1)*r1+bstr*I2(i+1)/N)); lamda3(n-i)=(lamda3(n-i+1)+h*(-lamda1(n-i)*b1*S(i+1)/N-lamda2(n-i)*(-b1*S(i+1)/N-(1-u2(n-i+1))*p*r2-b2*T(i+1)/N)-... lamda4(n-i+1)*(-(1-u2(n-i+1))*q*r2)-lamda6(n-i+1)*(-(1-(1-u2(n-i+1))*(p+q))*r2+b2*T(i+1)/N)))/(1+h*(mu+d1+r2)); lamda4(n-i)=(lamda4(n-i+1)+h*(1+lamda5(n-i+1)*k2))/(1+h*(mu+k2)); lamda5(n-i)=(lamda5(n-i+1)+h*(1+lamda4(n-i)*bstr*(S(i+1)+L1(i+1)+T(i+1))/N-(lamda1(n-i)*S(i+1)+lamda2(n-i)*L1(i+1)+... lamda6(n-i+1)*T(i+1))*bstr/N))/(1+h*(mu+d2)); lamda6(n-i)=(lamda6(n-i+1)+h*(lamda2(n-
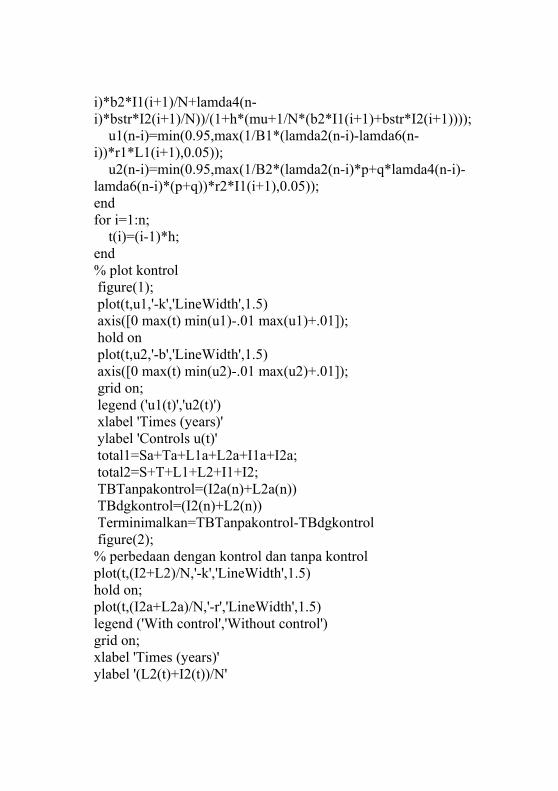
i)*b2*I1(i+1)/N+lamda4(n-i)*bstr*I2(i+1)/N))/(1+h*(mu+1/N*(b2*I1(i+1)+bstr*I2(i+1)))); u1(n-i)=min(0.95,max(1/B1*(lamda2(n-i)-lamda6(n-i))*r1*L1(i+1),0.05)); u2(n-i)=min(0.95,max(1/B2*(lamda2(n-i)*p+q*lamda4(n-i)-lamda6(n-i)*(p+q))*r2*I1(i+1),0.05)); end for i=1:n; t(i)=(i-1)*h; end % plot kontrol figure(1); plot(t,u1,'-k','LineWidth',1.5) axis([0 max(t) min(u1)-.01 max(u1)+.01]); hold on plot(t,u2,'-b','LineWidth',1.5) axis([0 max(t) min(u2)-.01 max(u2)+.01]); grid on; legend ('u1(t)','u2(t)') xlabel 'Times (years)' ylabel 'Controls u(t)' total1=Sa+Ta+L1a+L2a+I1a+I2a; total2=S+T+L1+L2+I1+I2; TBTanpakontrol=(I2a(n)+L2a(n)) TBdgkontrol=(I2(n)+L2(n)) Terminimalkan=TBTanpakontrol-TBdgkontrol figure(2); % perbedaan dengan kontrol dan tanpa kontrol plot(t,(I2+L2)/N,'-k','LineWidth',1.5) hold on; plot(t,(I2a+L2a)/N,'-r','LineWidth',1.5) legend ('With control','Without control') grid on; xlabel 'Times (years)' ylabel '(L2(t)+I2(t))/N'
Lampiran 2 GUI function varargout = Tuberculosis_Control(varargin) % TUBERCULOSIS_CONTROL M-file for Tuberculosis_Control.fig % TUBERCULOSIS_CONTROL, by itself, creates a new TUBERCULOSIS_CONTROL or raises the existing % singleton*. % % H = TUBERCULOSIS_CONTROL returns the handle to a new TUBERCULOSIS_CONTROL or the handle to % the existing singleton*. % % TUBERCULOSIS_CONTROL('CALLBACK',hObject,eventData,handles,...) calls the local % function named CALLBACK in TUBERCULOSIS_CONTROL.M with the given input arguments. % % TUBERCULOSIS_CONTROL('Property','Value',...) creates a new TUBERCULOSIS_CONTROL or raises the % existing singleton*. Starting from the left, property value pairs are % applied to the GUI before Tuberculosis_Control_OpeningFunction gets called. An % unrecognized property name or invalid value makes property application % stop. All inputs are passed to Tuberculosis_Control_OpeningFcn via varargin. % % *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one % instance to run (singleton)". %
% See also: GUIDE, GUIDATA, GUIHANDLES % Edit the above text to modify the response to help Tuberculosis_Control % Last Modified by GUIDE v2.5 11-Jan-2009 17:21:07 % Begin initialization code - DO NOT EDIT gui_Singleton = 1; gui_State = struct('gui_Name', mfilename, ... 'gui_Singleton', gui_Singleton, ... 'gui_OpeningFcn', @Tuberculosis_Control_OpeningFcn, ... 'gui_OutputFcn', @Tuberculosis_Control_OutputFcn, ... 'gui_LayoutFcn', [] , ... 'gui_Callback', []); if nargin && ischar(varargin{1}) gui_State.gui_Callback = str2func(varargin{1}); end if nargout [varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:}); else gui_mainfcn(gui_State, varargin{:}); end % End initialization code - DO NOT EDIT % --- Executes just before Tuberculosis_Control is made visible. function Tuberculosis_Control_OpeningFcn(hObject, eventdata, handles, varargin) % This function has no output args, see OutputFcn. % hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % varargin command line arguments to Tuberculosis_Control (see VARARGIN) % Choose default command line output for Tuberculosis_Control handles.output = hObject; % Update handles structure guidata(hObject, handles); % UIWAIT makes Tuberculosis_Control wait for user response (see UIRESUME) % uiwait(handles.figure1); % --- Outputs from this function are returned to the command line. function varargout = Tuberculosis_Control_OutputFcn(hObject, eventdata, handles) % varargout cell array for returning output args (see VARARGOUT); % hObject handle to figure % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % Get default command line output from handles structure varargout{1} = handles.output; function inputN_Callback(hObject, eventdata, handles) % hObject handle to inputN (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA) % Hints: get(hObject,'String') returns contents of inputN as text % str2double(get(hObject,'String')) returns contents of inputN as a double N=str2double(get(handles.inputN,'String')); handles.N=N; guidata(hObject,handles); % --- Executes during object creation, after setting all properties. function inputN_CreateFcn(hObject, eventdata, handles) % hObject handle to inputN (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles empty - handles not created until after all CreateFcns called % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white'); end function inputB1_Callback(hObject, eventdata, handles) % hObject handle to inputB1 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % Hints: get(hObject,'String') returns contents of inputB1 as text % str2double(get(hObject,'String')) returns contents of inputB1 as a double B1=str2double(get(handles.inputB1,'String'));
handles.B1=B1; guidata(hObject,handles); % --- Executes during object creation, after setting all properties. function inputB1_CreateFcn(hObject, eventdata, handles) % hObject handle to inputB1 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles empty - handles not created until after all CreateFcns called % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white'); end function inputB2_Callback(hObject, eventdata, handles) % hObject handle to inputB2 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % Hints: get(hObject,'String') returns contents of inputB2 as text % str2double(get(hObject,'String')) returns contents of inputB2 as a double B2=str2double(get(handles.inputB2,'String')); handles.B2=B2; guidata(hObject,handles); % --- Executes during object creation, after setting all properties. function inputB2_CreateFcn(hObject, eventdata, handles) % hObject handle to inputB2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB % handles empty - handles not created until after all CreateFcns called % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white'); end function inputMax_Callback(hObject, eventdata, handles) % hObject handle to inputMax (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % Hints: get(hObject,'String') returns contents of inputMax as text % str2double(get(hObject,'String')) returns contents of inputMax as a double Max=str2double(get(handles.inputMax,'String')); handles.Max=Max; guidata(hObject,handles); % --- Executes during object creation, after setting all properties. function inputMax_CreateFcn(hObject, eventdata, handles) % hObject handle to inputMax (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white'); end function inputMin_Callback(hObject, eventdata, handles) % hObject handle to inputMin (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % Hints: get(hObject,'String') returns contents of inputMin as text % str2double(get(hObject,'String')) returns contents of inputMin as a double Min=str2double(get(handles.inputMin,'String')); handles.Min=Min; guidata(hObject,handles); % --- Executes during object creation, after setting all properties. function inputMin_CreateFcn(hObject, eventdata, handles) % hObject handle to inputMin (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles empty - handles not created until after all CreateFcns called % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white');
end % --- Executes on button press in Proses. function Proses_Callback(hObject, eventdata, handles) % hObject handle to Proses (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) Max=handles.Max; Min=handles.Min; B1=handles.B1; B2=handles.B2; N=handles.N; mu=.0143; bstr=0.029; b1=13;b2=13;k1=.5;k2=1;d1=0;d2=0; r1=2; r2=1; p=.4;q=.1; h=.1; t=0:h:5; n=numel(t); A=mu*N; % data Untuk kontrol lamda1(n)=0;lamda2(n)=0;lamda3(n)=0;lamda4(n)=0;lamda5(n)=0;lamda6(n)=0; S(1)=76/120*N;L1(1)=36/120*N;I1(1)=4/120*N;L2(1)=2/120*N; I2(1)=1/120*N ;T(1)=1/120*N; % data untuk tanpa kontrol Sa(1)=76/120*N;L1a(1)=36/120*N;I1a(1)=4/120*N;L2a(1)=2/120*N;I2a(1)=1/120*N ;Ta(1)=1/120*N; % estimasi data tanpa kontrol;
for i=1:n-1; Sa(i+1)=(Sa(i)+h*A)/(1+h*(mu+1/N*(b1*I1a(i)+bstr*I2a(i)))); L1a(i+1)=(L1a(i)+h*(b1*Sa(i+1)*I1a(i)/N+p*r2*I1a(i)+b2*Ta(i)*I1a(i)/N))/(1+h*(mu+k1+bstr*I2a(i)/N)); I1a(i+1)=(I1a(i)+h*k1*L1a(i+1))/(1+h*(mu+d1+r2)); L2a(i+1)=(L2a(i)+h*(q*r2*I1a(i+1)+bstr*(Sa(i+1)+L1a(i+1)+Ta(i))*I2a(i)/N))/(1+h*(mu+k2)); I2a(i+1)=(I2a(i)+h*k2*L2a(i+1))/(1+h*(mu+d2)); Ta(i+1)=(Ta(i)+h*((1-(p+q))*r2*I1a(i+1)))/(1+h*(mu+1/N*(b2*I1a(i+1)+bstr*I2a(i+1)))); end % estimasi data terkontrol u1(n)=Min;u2(n)=Min; for i=1:n-1; S(i+1)=(S(i)+h*A)/(1+h*(mu+1/N*(b1*I1(i)+bstr*I2(i)))); L1(i+1)=(L1(i)+h*(b1*S(i+1)*I1(i)/N+(1-u2(n-i+1))*p*r2*I1(i)+b2*T(i)*I1(i)/N))/(1+h*(mu+k1+u1(n-i+1)*r1+bstr*I2(i)/N)); I1(i+1)=(I1(i)+h*k1*L1(i+1))/(1+h*(mu+d1+r2)); L2(i+1)=(L2(i)+h*((1-u2(n-i+1))*q*r2*I1(i+1)+bstr*(S(i+1)+L1(i+1)+T(i))*I2(i)/N))/(1+h*(mu+k2)); I2(i+1)=(I2(i)+h*k2*L2(i+1))/(1+h*(mu+d2)); T(i+1)=(T(i)+h*(u1(n-i+1)*r1*L1(i+1)+(1-(1-u2(n-i+1))*(p+q))*r2*I1(i+1)))/(1+h*(mu+1/N*(b2*I1(i+1)+bstr*I2(i+1)))); lamda1(n-i)=(lamda1(n-i+1)+h/N*(lamda2(n-i+1)*b1*I1(i+1)+lamda4(n-i+1)*bstr*I2(i+1)))/(1+h*(mu+1/N*(b1*I1(i+1)+bstr*I2(i+1))));
lamda2(n-i)=(lamda2(n-i+1)+h*(k1*lamda3(n-i+1)*+lamda4(n-i+1)*bstr*I2(i+1)/N+lamda6(n-i+1)*u1(n-i+1)*r1))/... (1+h*(mu+k1+u1(n-i+1)*r1+bstr*I2(i+1)/N)); lamda3(n-i)=(lamda3(n-i+1)+h*(-lamda1(n-i)*b1*S(i+1)/N-lamda2(n-i)*(-b1*S(i+1)/N-(1-u2(n-i+1))*p*r2-b2*T(i+1)/N)-... lamda4(n-i+1)*(-(1-u2(n-i+1))*q*r2)-lamda6(n-i+1)*(-(1-(1-u2(n-i+1))*(p+q))*r2+b2*T(i+1)/N)))/(1+h*(mu+d1+r2)); lamda4(n-i)=(lamda4(n-i+1)+h*(1+lamda5(n-i+1)*k2))/(1+h*(mu+k2)); lamda5(n-i)=(lamda5(n-i+1)+h*(1+lamda4(n-i)*bstr*(S(i+1)+L1(i+1)+T(i+1))/N-(lamda1(n-i)*S(i+1)+lamda2(n-i)*L1(i+1)+... lamda6(n-i+1)*T(i+1))*bstr/N))/(1+h*(mu+d2)); lamda6(n-i)=(lamda6(n-i+1)+h*(lamda2(n-i)*b2*I1(i+1)/N+lamda4(n-i)*bstr*I2(i+1)/N))/(1+h*(mu+1/N*(b2*I1(i+1)+bstr*I2(i+1)))); u1(n-i)=min(Max,max(1/B1*(lamda2(n-i)-lamda6(n-i))*r1*L1(i+1),Min)); u2(n-i)=min(Max,max(1/B2*(lamda2(n-i)*p+q*lamda4(n-i)-lamda6(n-i)*(p+q))*r2*I1(i+1),Min)); end withkontrol=L2(n)+I2(n) withoutkontrol=L2a(n)+I2a(n) TBmin=withoutkontrol-withkontrol axes(handles.Kontrol); plot(t,u1,'-k','LineWidth',1.5) axis([0 max(t) min(u1)-.01 max(u1)+.01]); hold on plot(t,u2,'-b','LineWidth',1.5) axis([0 max(t) min(u2)-.01 max(u2)+.01]); grid on; legend ('u1(t)','u2(t)') xlabel 'Times (years)' ylabel 'Controls u(t)'
axes(handles.HasilTB) plot(t,(I2+L2)/N,'-k','LineWidth',1.5) hold on; plot(t,(I2a+L2a)/N,'-r','LineWidth',1.5) legend ('With control','Without control') grid on; xlabel 'Times (years)' ylabel '(L2(t)+I2(t))/N' % --- Executes on button press in Tutup. function Tutup_Callback(hObject, eventdata, handles) % hObject handle to Tutup (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) delete(handles.figure1)