broadband rms meter of low hf signals€¦ · broadband rms meter of low hf ... part of the thesis...
TRANSCRIPT

1
BRNO UNIVERSITY OF TECHNOLOGY
Faculty of Electrical Engineering and Communication
Institute of Radio Electronics
Broadband RMS Meter of Low HF Signals Diploma Thesis
Study Specialization: Electronics and Communication
Author: Jií SAPÁK
Supervisor: Professor Václav íný
ABSTRACT This paper describes analogue techniques of measurement of True-RMS (Root Mean Square) value of signals with different characteristics. RMS to DC conversion is a fundamental task in the measurement of AC signals. The RMS value of an AC signal is the amount of DC required to produce an equivalent amount of heat in the same load. The True-RMS converters are usually used in a hand and desk multimeters, digital oscilloscopes and also in various special applications. An example of such special application is a signal-to-noise ratio (SNR) measurement of videosignals which contain True-RMS converter for measurement of noise power. The first part of this thesis deals with problems and principles of measurements of signal-to-noise ratio for videosignals in the baseband. Detailed description of analogue implementation of a True-RMS converter and analogue-to-digital interface is presented, including construction plans. The second part deals in detail with problems of realization of analogue True-RMS converters. A few converters based on Analog Devices integrated circuits (AD734, AD8361, AD637) were constructed and their properties were measured and evaluated. The results are presented in this part of the thesis and the best implementation of the converter for signal-to-noise ratio meter is chosen.

2
Prohlášení
Prohlašuji, že svou diplomovou práci na téma „Širokopásmový mi efektivní hodnoty malých vysokofrekvenních signál“ jsem vypracoval samostatn pod vedením vedoucího diplomové práce a s použitím odborné literatury a dalších informaních zdroj, které jsou všechny uvedeny v seznamu literatury na konci práce. V Brn dne ............... ............................................ (podpis autora)
3
Podkování
Dkuji vedoucímu diplomové práce Prof. Ing. Václavu ínému, CSc. za píkladnou metodickou, pedagogickou a odbornou pomoc a další cenné rady nejen pi zpracování mé diplomové práce. Dále dkuji rodim za všestrannou podporu pi studiu. V Brn dne ............... ............................................
(podpis autora)

4
VYSOKÉ UENÍ TECHNICKÉ V BRN
Fakulta elektrotechniky a komunikaních technologií
Ústav radioelektroniky
ŠIROKOPÁSMOVÝ MI EFEKTIVNÍ HODNOTY MALÝCH
VYSOKOFREKVENNÍCH SIGNÁL diplomová práce
Studijní obor: Elektronika a sdlovací technika
Jméno studenta: Jií SAPÁK
Vedoucí diplomové práce: Prof. Ing. Václav íný, CSc.

5
1 ÚVOD............................................................................................................................................................. 6
2 MI ODSTUPU SIGNÁLU OD ŠUMU PRO VIDEOSIGNÁLY....................................................... 6 2.1 METODA MENÍ ODSTUPU SIGNÁLU OD ŠUMU U VIDEOSIGNÁLU ........................................................ 7 2.2 PRINCIP FUNKCE A BLOKOVÉ SCHÉMA MIE ODSTUPU SIGNÁLU OD ŠUMU ..................................... 8 2.3 PODROBNÝ POPIS A NÁVRH JEDNOTLIVÝCH ÁSTÍ MIE ................................................................11
2.3.1 Emitorový sledova (ES) ................................................................................................................11 2.3.2 Dolní propust (DP) ........................................................................................................................12 2.3.3 Horní propust (HP) ........................................................................................................................15 2.3.4 Videometrický filtr (VMF) ..............................................................................................................18 2.3.5 Obnovitel stejnosmrné složky videosignálu (ODC + OSS)...........................................................19 2.3.6 Rychlý jednocestný detektor (RJD) a A/D pevodník (A/D p1) ......................................................20 2.3.7 Pepínatelný zesilova PZ1 (PZ2)..................................................................................................21 2.3.8 Pevodník efektivní hodnoty signálu na stejnosmrné naptí (RMS-DC) ......................................22 2.3.9 Celkové zapojení analogové ásti mie signálu od šumu............................................................22 2.3.10 Rozpiska souástek.........................................................................................................................26
3 MIE EFEKTIVNÍ HODNOTY SIGNÁLU .......................................................................................28 3.1 MATEMATICKÁ DEFINICE EFEKTIVNÍ HODNOTY .................................................................................28 3.2 VÝPOET EFEKTIVNÍ HODNOTY SIGNÁL ZÁKLADNÍCH TVAR..........................................................29 3.3 METODY MENÍ EFEKTIVNÍ HODNOTY...............................................................................................36
3.3.1 Mení efektivní hodnoty magnetoelektrickým micím ústrojím: .................................................36 3.3.2 Mení efektivní hodnoty tepelnými metodami:..............................................................................36 3.3.3 Digitální pevodníky.......................................................................................................................37 3.3.4 Poítací analogové pevodníky ......................................................................................................37
3.4 RMS-DC PEVODNÍK S AD734 V DOPORUENÉM ZAPOJENÍ .............................................................38 3.4.1 Mení vlastností RMS-DC pevodníku s AD734 v doporueném zapojení ...................................39
3.5 VYLEPŠENÍ ZÁKLADNÍHO ZAPOJENÍ RMS-DC PEVODNÍKU S AD734...............................................45 3.5.1 Optimalizace pracovního režimu dliky AD734 ...........................................................................45 3.5.2 Pepínání vstupní citlivosti upraveného zapojení RMS-DC pevodníku s AD734 .........................46 3.5.3 Korekce napových nesymetrií AD734AN v zapojení RMS-DC pevodníku................................47 3.5.4 Mení na upraveném zapojení RMS-DC pevodníku s obvodem AD734......................................50
3.6 RMS-DC PEVODNÍK S OBVODEM AD8361.........................................................................................55 3.7 RMS-DC PEVODNÍK S OBVODEM AD637...........................................................................................60
3.7.1 Analýza vlastností RMS-DC pevodníku s obvodem AD637 ..........................................................62 3.8 POUŽITÉ MICÍ PÍSTROJE .................................................................................................................67
4 ZÁVR..........................................................................................................................................................68
LITERATURA.....................................................................................................................................................69
PÍLOHA.............................................................................................................................................................70

6
1 ÚVOD
Mie efektivní hodnoty signál libovolných periodických prbh se v praxi asto používají jako souást píruních nebo stolních multimetr a obvykle také jako souást digitálních osciloskop. Dále se používají ve speciálních aplikacích, kde je teba znát efektivní hodnotu signálu. Mezi takové aplikace patí i mi odstupu signálu od šumu obrazových signál, jehož ešení je souástí této diplomové práce. V tomto mii je teba urovat efektivní hodnotu šumové složky obrazového signálu a je proto nutno použít nkterý z dostupných integrovaných pevodník pro realizaci tohoto úkolu.
Diplomová práce se dlí na dv ásti. V první ásti je popsána použitá metoda mení odstupu signálu od šumu u obrazových signál. Metoda je založena na kmitotové separaci videosignálu do dvou kmitotov odlišných vtví. V jedné vtvi je zpracováván speciální zkušební obrazový signál s odfiltrovaným šumem a v druhé vtvi je zpracováván samotný šum s odfiltrovaným kmitotovým spektrem signálu. Dále je zde uveden návrh analogové a analogov-digitální ásti mie odstupu signálu od šumu vetn konstrukních podklad. Digitální ást (zpracování výstupních dat mikroprocesorem) není souástí návrhu.
V druhé ásti je detailn rozebrána problematika mení efektivní hodnoty signál rzných charakter, protože souástí zmínného mie odstupu signálu od šumu je analogový širokopásmový mi efektivní hodnoty vysokofrekvenních signál, použitý k mení pibližné (prmrné) efektivní hodnoty šumu. Realizace takového mie pináší nemálo komplikací, proto je zde popsáno nkolik zapojení pevodník využívajících integrované obvody firmy Analog Devices urené pro tento úel. Pevodníky byly realizovány v podob pokusných pípravk a podrobn promeny. Následn byl vybrán nejvhodnjší pevodník pro použití v mii odstupu signálu od šumu.
2 MI ODSTUPU SIGNÁLU OD ŠUMU PRO VIDEOSIGNÁLY
K mení a stanovení šumového ísla F aktivních a pasivních souástek je k dispozici ada dostupných metod, zatímco pímé mení odstupu signálu od šumu je pomrn komplikované. Pitom tato mení jsou velmi dležitá v televizní technice a videotechnice, protože šum se znanou mrou podílí na zhoršení obrazu. Šumové pomry se podle [1] definují nkolika zpsoby:
a) pomr mezivrcholových hodnot naptí signálu a šumu ΦSNR = USpp/UNpp (asto používaná definice v TV technice), nebo podobn
b) pomr mezivrcholové hodnoty naptí signálu a efektivní hodnoty šumu ΦSNR = USpp/UNef
c) pomr výkon signálu a šumu S/N nebo SNR (Signal to Noise Ratio) v základním kmitotovém pásmu
d) pomr výkon signálu a šumu C/N (Carier to Noise) ve vysokofrekvenním pásmu a znaí pomr výkonu nosné obrazu k celkovému šumovému výkonu v šumovém kmitotovém pásmu)
Protože Φ pedstavuje pomr naptí a SNR pomr výkon signálu a šumu, jsou tyto pomry za pedpokladu impedanního pizpsobení svázány vztahem SNR = (Φ SNR)2. Zvláštností je dvojí definice ΦSNR, viz.: a) a b), kde obojí dávají rzné výsledky. Protože šum je náhodná veliina, lze uvažovat o mení asov stálé hodnoty jeho mezivrcholové hodnoty

7
jen omezen a vhodnjší je proto použít druhou definici. Efektivní hodnota šumu má totiž lepší vypovídací schopnost o vlastnostech šumového signálu. Nicmén i v tomto pípad je teba si uvdomit, že efektivní hodnota šumu je také asov promnná veliina a je proto teba urovat prmrnou efektivní hodnotu za uritý asový úsek. V této práci bude dále používána pouze druhá definice pomru signálu k šumu, tedy:
ΦSNR= USpp/UNef, [-] (1)
pípadn v logaritmické míe:
ΦSNR dB = 20 log (USpp/UNef). [dB] (2)
Pomr ΦSNR se nazývá nevyvážený, protože bývá obvykle definován pro „bílý“ šum, aniž je pitom uvažováno fyziologické vnímání pozorovatele šumu v obraze. Proto je zaveden i vyvážený pomr ΦWSNR, který je men na výstupu takzvaného videometrického filtru. Ten je realizován dolní propustí druhého ádu (pemostný T lánek s asovou konstantou τ = 0,33 µs). Videometrický filtr potlauje šum na vyšších kmitotech, který pro pozorovatele nepsobí tolik rušiv jako nízkofrekvenní šum. Na jeho výstupu je tedy meno šumové spektrum, podílející se nejvíce na rušivém „zrnní“ v obraze. Videometrický filtr zmenšuje namenou hodnotu odstupu signálu od šumu pro „bílý“ šum o 9,3 dB.
2.1 METODA MENÍ ODSTUPU SIGNÁLU OD ŠUMU U VIDEOSIGNÁLU Odstup signálu od šumu mže být zjištn pomocí osciloskopu zmením mezivrcholové
hodnoty signálu a pibližné mezivrcholové hodnoty šumu a následným podlením zjištných hodnot. Tato metoda je ale nepraktická a navíc tžko použitelná pro vysoké hodnoty ΦSNR (šum má píliš malý rozkmit). Jako vhodnjší se jeví metoda kmitotové filtrace videosignálu se superponovaným šumem a postupné mení složek signálu, tedy mezivrcholové hodnoty videosignálu a efektivní hodnoty šumu. Tyto hodnoty jsou vhodným zpsobem upraveny a následn podleny. Tato metoda je pomrn snadno realizovatelná, protože pomocné složky kompozitního videosignálu leží v pomrn úzkém kmitotovém pásmu (desítky kHz) narozdíl od šumové složky, která mže pokrývat celé kmitotové pásmo televizního kanálu. Pedpokladem je ale použití speciálního zkušebního signálu, který minimáln (nebo pokud možno vbec) nerozšíí úzké kmitotové spektrum samotných synchronizaních impuls. Takovému požadavku vyhovuje signál odpovídající napíklad bílému obrazu nebo signál odpovídající obrazu erné a bílé, piemž rozhraní erné a bílé je v obraze vertikální. Takový signál je totiž tvoen obdélníkovým signálem o kmitotu odpovídajícím kmitotu ádkových synchronizaních impuls a jeho spektrum je relativn úzké (pibližn trojnásobek kmitotu ádkových synchronizaních impuls). Takový signál bývá obvykle souástí souboru modulaních signál zkušebních TV generátor.
Je zejmé, že díky kmitotové filtraci není možné mit šumové spektrum na nízkých kmitotech spadajících do kmitotového pásma synchronizace, mení tak obsahuje principiální chybu. Mené šumové spektrum se však zmenší jen o malou ást, takže chyba není píliš velká, je však nutné s ní poítat. Micí metoda rovnž není vhodná pro mení barevného kompozitního signálu, obsahující spektrální složky na vyšších kmitotech, které by pronikaly do kanálu pro mení šumu a zpsobovaly by chybné mení.

8
2.2 PRINCIP FUNKCE A BLOKOVÉ SCHÉMA MIE ODSTUPU SIGNÁLU OD ŠUMU Princip funkce je patrný z blokového schématu na obr. 1. Mený kompozitní
videosignál CVS s pídavným šumem je piveden na vstup emitorového sledovae ES, kde je impedann pizpsoben a následn rozdlen do dvou kmitotov odlišných kanál. Signál na výstupu dolní propusti (DP) odpovídá nízkofrekvenním složkám jasového signálu a signál na výstupu horní propusti (HP), jejíž lomový kmitoet leží mimo kmitotové pásmo videosignálu, odpovídá pedevším šumovému signálu. Filtry HP a DP jsou realizovány jako pasivní Cauerovy filtry pátého ádu, z dvodu dosažení co nejvtší strmosti pechod mezi propustnými a nepropustnými oblastmi kmitotových charakteristik. Je zejmé, že díky filtraci není na výstupu horní propusti (HP) obsaženo celé kmitotové pásmo šumu v obrazovém kanálu, protože zde chybí pásmo kmitot odpovídající kmitotm obrazového signálu (kmitotové spektrum synchronizaní smsi a zkušebního obrazce). V této kmitotové oblasti nelze filtrací separovat šum od signálu, proto se potlauje vše. Vzhledem šíce pásma kanálu 6,5 MHz lze však považovat ztrátu pásma kmitot 0 – 200 kHz za pomrn malou, i když ne zanedbatelnou. Lomový kmitoet horní propusti f = 200 kHz není vhodné dále snižovat, protože by do šumového kanálu zaaly ve vtší míe pronikat vyšší harmonické složky zkušebního videosignálu. Podobné otázky je teba ešit také u signálové vtve za dolní propustí. Zde je teba zvolit takový lomový kmitoet dolní propusti (DP) aby do signálového
Obr. 1: Blokové schéma analogové a analogov-digitální ásti mie odstupu signálu od šumu pro zkušební videosignály
Legenda ke zkratkám použitým v obr. 1:
ES ……….. emitorový sledova DP ………. dolní propust HP …..…… horní propust OSS……… oddlova synchronizace PZ1 (PZ2)…pepínatelný vf. zesilova ODC …….. obnovitel stejnosmrné složky VMF ……… videometrický filtr
SP ……….... spína RJD……….. rychlý jednocestný detektor RMS-DC..... pevodník efektivní hodnoty
na stejnosmrné naptí A/D p1 (p2)… analogov-digitální
pevodníky

9
kanálu pronikala minimální ást šumového spektra (pásmu šumu odpovídajícímu kmitotovému spektru videosignálu se však nevyhnout nelze), ale pitom nesmí dojít k pílišnému potlaení vyšších harmonických složek signálu tak, aby na výstupu propusti znateln poklesla mezivrcholová hodnota naptí signálu. Z tchto dvod se jako minimální možný lomový kmitoet jeví hodnota odpovídající pibližn ptinásobku základní harmonické složky zkušebního videosignálu, tedy f = 80 kHz.
Separovaný videosignál na výstupu dolní propusti DP je piveden na vstup pepínatelného obrazového zesilovae, kde je podle poteby zesílen. Zesílení je možno volit bu 2x (+6 dB) pro kompenzaci poklesu úrovn signálu na dolní propusti díky impedannímu pizpsobení nebo 10x (+20dB), je-li men signál s jinou než standardní úrovní 1V. Velikost zesílení je možno volit elektronicky po ídící sbrnici (control bus) z mikroprocesoru.
V dalším kroku je teba obnovit stejnosmrnou složku signálu. Zde je požadavek, aby synchronizaní impulsy byly upnuty k uritému potenciálu, napíklad k nule (signál pak má nenulovou stejnosmrnou složku). Zavedením stídavé vazby v libovolném míst cesty videosignálu ale dojde k oddlení stejnosmrné složky (stední hodnota signálu je nulová).
Obr. 2: A) Kompozitní videosignál s oddlenou stejnosmrnou složkou a B) stejný signál po obnovení stejnosmrné složky; (proporce zobrazení synchronizaních puls pro lepší názornost neodpovídá skutenosti)
Penášet a zpracovávat stejnosmrnou složku kompozitního videosignálu je nevýhodné, proto je signál penášen a zpracováván ve stídav vázaných systémech. Stejnosmrná složka videosignálu však nese informaci o stedním jasu obrazu (tedy je-li obraz pevážn svtlý i tmavý), proto je teba tuto informaci na výstupu penosového etzce obnovit. To je možné díky periodicky se opakujícím synchronizaním pulsm, které jsou na výstupu generátoru kompozitního videosignálu vždy upnuty k nemnnému potenciálu (obr. 2B). Podaí-li se signál s oddlenou stejnosmrnou složkou (nulovou stední hodnotou – obr. 2A) upravit tak, aby byly synchronizaní úrovn upnuty opt k uritému nemnnému potenciálu, stejnosmrná složka se pln obnoví. Stejnosmrnou složku je možné obnovit v tzv. upínacím obvodu. Upínací obvod je ešen jako derivaní lánek, jehož výstup je periodicky (a ve vhodný okamžik) pipojován pomocí ízeného spínae na krátký okamžik k upínacímu potenciálu.

10
Podrobnjší popis innosti je možno nalézt v literatue [2] a [10]. Díky obvodu obnovitele stejnosmrné složky (ODC) dostáváme na jeho výstupu signál upnutý synchronizaními úrovnmi k pevnému potenciálu (podobn jako na výstupu generátoru signálu ped stídavou vazbou).
Pokud by obnovitel stejnosmrné složky nebyl použit, bylo by teba mit mezivrcholovou hodnotu signálu dvma jednocestnými detektory, piemž naptí na jejich výstupech by bylo nutno sítat na sítacím zesilovai. Navíc by pi mení mezivrcholové hodnoty videosignálu byly vždy zahrnuty i úrovn mimo jasový rozsah videosignálu (synchronizaní úrovn). Výhodnjší je tedy použití jednoduchého obnovitele stejnosmrné složky, který se v televizní technice standardn používá. Potom totiž staí použít jen jednocestný detektor pro urení mezivrcholové hodnoty videosignálu. Pak je ale nutno klíovat spína v okamžiku ukonení synchronizaního impulsu, kdy ješt trvá zatemovací impuls – tedy klíovat na úrove erné. Upínáme-li ernou úrove k nule, jsou zatemovací úrove a synchronizaní úrove záporné, ale jasové úrovn jsou kladné a je tak možno pomocí jednocestného detektoru urit mezivrcholovou hodnotu samotného videosignálu. Stejný výsledek je možné dosáhnout klíováním v okamžiku trvání synchronizaní úrovn (pak lze spína snadno klíovat pímo oddlenými synchronizaními impulsy) a tyto synchronizaní úrovn upínat k zápornému naptí. Bude-li záporné naptí mít velikost rozdílu synchronizaní a zatemovací úrovn, dosáhneme stejného výsledku jako v pedchozím pípad. Zde se však pedpokládá, že bude upínán kompozitní videosignál vždy se stejnou mezivrcholovou hodnotou, nap. 1V.
Signál s obnovenou stejnosmrnou úrovní je piveden na vstup rychlého jednocestného usmrovae s filtrem na výstupu (RJD). Na jeho výstupu je naptí odpovídající špikové hodnot vstupního naptí, které se v tomto pípad rovná mezivrcholové hodnot vstupního signálu. Toto konstantní naptí je pivedeno na vstup osmibitového analogov-digitálního pevodníku, ve kterém je jeho velikost pevedena na odpovídající osmibitové slovo. Tístavové datové výstupy jsou pipojeny na spolenou osmibitovou jednosmrnou sbrnici (data bus), urenou pro pipojení k portu mikroprocesoru.
Na výstupu horní propusti (HP) pevažuje šumový signál, který má oproti jasovému signálu ádov menší amplitudu, která je díky impedannímu pizpsobení filtru navíc zmenšena na polovinu. Proto je teba získaný šumový signál výrazn zesílit, k emuž slouží podobný pepínatelný zesilova (PZ2) jako v signálové vtvi, ale s vtším zesílením 50x (+34 dB) resp. 10x (+20 dB). Na výstup zesilovae je zaazen videometrický filtr, který je možno v pípad poteby vyadit z innosti pemostním pomocí miniaturního relé. Relé je možno ovládat pomocí ídící sbrnice (control bus) podobn jako pepínatelné zesilovae.
Detekce šumu se provádí pevodem prbhu šumového signálu na stejnosmrné naptí odpovídající svou velikostí jeho efektivní hodnot. K tomu slouží integrovaný pevodník efektivní hodnoty na stejnosmrné naptí (True Root Mean Square - True RMS nebo také RMS-to-DC converter). Na výstupu RMS-DC pevodníku je, podobn jako na výstupu jednocestného detektoru, stejnosmrné konstatní naptí, které je pomocí A/D pevodníku A/D p2 pevedeno na osmibitové slovo. Výstupy druhého A/D pevodníku jsou opt pivedeny na spolenou datovou sbrnici.
Digitální ást pístroje, která není souástí ešení této práce, bude tvoena mikroprocesorem, klávesnicí a zobrazovaem. Mikroprocesor pak bude provádt tuto innost: stídav naítat data z jednoho a druhého A/D pevodníku, piemž jedno z datových slov ukládat do stadae. Následn budou ob ísla podlena, pípadn zkorigována. Korekce mohou zahrnovat eliminaci vlastních šumových ísel použitých zesilova, pípadn

11
nelinearity jednotlivých komponent cest zpracování signálu (resp. šumu) a podobn. Na výstupu procesoru bude nutno zaadit vhodné rozhraní pro zobrazení namených údaj. Mikroprocesor krom výpotu musí pomocí ídící sbrnice komunikovat s obma A/D pevodníky (ízení tístavových výstup) a dále mením úrovní šumu resp. signálu (porovnáváním úrovní pevedených do digitální podoby) pepínat zesílení zesilova PZ2 resp. PZ1. Všechny tyto innosti bude procesor ovládat v reálném ase, bez nutnosti zásahu obsluhy. Ovládání spínae pemosujícího videometrický filtr musí být naopak možné na pokyn obsluhy. Dále by bylo vhodné píslušný software rozšíit o detekci a vhodnou signalizaci pebuzení obou micích vtví a podobn. Ovládání celého pístroje bude možné pomocí jednoho i dvou tlaítek pipojených pes vhodný interface k mikroprocesoru.
K napájení pístroje je teba stabilizované stejnosmrné naptí +/- 15V získané ze síového zdroje, pípadn bateriové napájení (tyi dobíjecí lánky velikosti AA doplnné o jednoduché integrované pulsní mnie vytváející stabilizované dvojité napájecí naptí +/- 15V). Napájecí zdroj rovnž nebyl pedmtem zadání diplomové práce.
2.3 PODROBNÝ POPIS A NÁVRH JEDNOTLIVÝCH ÁSTÍ MIE V následujícím textu bude podrobn rozebrán návrh jednotlivých funkních blok
analogové ásti popisovaného mie odstupu signálu od šumu, krom pevodníku efektivní hodnoty šumu na stejnosmrné naptí. Tomu se vnuje celá druhá ást diplomové práce.
2.3.1 Emitorový sledova (ES)
na obr. 3 je schéma emitorového sledovae použitého na vstupu pístroje. Výhodou emitorového sledovae je velký vstupní odpor a malý výstupní odpor. Jeho napový penos je pibližn roven AU ≤ 1. Zvolený tranzistor BC817-40 má podle katalogových list minimální proudový zesilovací initel h21E = 250 a tranzitní kmitoet pro malé signály fT = 100 MHz. Zátž emitorového sledovae pro výpoet stejnosmrného pracovního bodu je tvoena rezistorem R2 a sériovou kombinací odpor R3 a R4 (spojené pes vinutí cívek L1 a L2, rezistivita vinutí zanedbána) tvoící souást dolní propusti, která bude ke sledovai pipojena (viz. obr. 16). Pracovní zátž emitorového sledovae je tak bez signálu pibližn rovna RZ = 150 Ω.
Klidový pracovní proud kolektorem pi napájecím naptí 15 V byl zvolen ICO = 20 mA. Je-li proudový zesilovací initel tranzistoru pibližn roven h21E = 250, potom je proud báze IB0 = 80 µA. Je-li pi klidovém kolektorovém proudu na zátži RZ úbytek naptí URZ = 3 V a naptí na pechodu B-E rovno UBE = 0,65 V, pak je na rezistoru R1 úbytek naptí UR1 = 11,4 V. Má-li pes nj téct proud IB0 = 80 µA, je teba zvolit hodnotu R1 = 150 kΩ. Kondenzátor C41 zajišuje blokování napájecího zdroje pro stídavé signály. Výstupní signál je piveden na vstupy doplní propusti (DP), horní propusti (HP) a vysokoimpedanního vstupu oddlovae synchronizaní smsi.
Výstupní dynamický odpor sledovae je podle [11] pibližn roven re = 40.IC0, tedy
pibližn 0,8 Ω. Podobn vstupní odpor sledovae je pibližn roven RVST = h21E . RZ, tedy
37,5 kΩ. asová konstanta τ lánku RC tvoeného vazebním kondenzátorem C21 a vstupním odporem RVST musí být alespo desetkrát vtší než perioda nejnižšího penášeného kmitotu (fMIN = 50 Hz, TMIN = 20 ms). Pro τ = 200 ms je tak teba minimální kapacita C21 = 5,4 µF.

12
Vstup je pizpsoben pomocí rezistoru R31 o velikosti 75 Ω. Aby tento rezistor nenarušil nastavení stejnosmrného pracovního bodu, je pipojen k bázi pes C21.
Obr. 3: Emitorový sledova (ES)
2.3.2 Dolní propust (DP)
Pi návrhu mie odstupu signálu od šumu bylo rozhodnuto, že ob použité propusti (DP i LP) budou realizovány jako pasivní Cauerovy-ebyševovy filtry, aby se zamezilo pípadným problémm s šumem a stabilitou aktivních filtr. Výhodou Cauerových filtr je také malé zvlnní penosové charakteristiky v propustném pásmu, což je pro úely mení výhodné. Cauerovy-ebyševovy filtry se znaí znakou CC a následným šestiíslím. Napíklad CC05 05 50 znamená Cauer-ebyševv filtr 5. ádu s initelem odrazu ρ = 5 % a modulárním úhlem Θ = 50°. Schéma zapojení dolní propusti je na obr. 4. Rezistory R1 a R2 tvoí nedílnou souást filtru, realizují impedanní pizpsobení a jejich hodnoty je teba zohledovat pi výpotu hodnot ostatních souástek dolní propusti. Vstup je teba pipojit ke generátoru s malým vnitním odporem, realizovaným již popsaným emitorovým sledovaem.
Obr. 4: Schéma zapojení Cauerovy dolní propusti 5. ádu

13
Návrhem byl uskutenn podle algoritmu uvedeném v literatue [3]. Následnými simulacemi v programu PSpice se ukázalo, že nejvhodnjším typem filtru pro DP i HP je CC05 15 35. Potlaení kmitot v nepropustném pásmu je u tohoto typu filtru minimáln 51 dB. Výpoet hodnot souástek filtru je následující. V tabulce hodnot filtr (možno nalézt v [3]) se vyhledají koeficienty odpovídající jednotlivým prvkm filtru CC05 15 35. Tytéž koeficienty platí pro výpoet dolní i horní propusti. Nalezené koeficienty se pak dosazují do píslušných vztah a vypoítají se pak konkrétní hodnoty souástek.
Koeficienty pro R1 = R2 jsou tyto:
ωs, = 1,7434
c1 = 1,0642
c2 = 0,10189
c3 = 1,72819
c4 = 0,28504
c5 = 0,91277
l2 = 1,26415
l4 = 1,06267
Výpoty konkrétních hodnot souástek dolní propusti CC05 15 35:
R1 = R2 = 75 Ω (zvoleno), ρ = 0,15 (tj. 15%), Θ = 35°.
fo = 80 kHz (zvoleno)
nFR
cC 23,28
75108020642,11
1 310
=⋅⋅⋅
==πω
nFR
cC 703,2
751080210189,02
2 310
=⋅⋅⋅
==πω
nFR
cC 84,45
751080272819,13
3 310
=⋅⋅⋅
==πω
nFR
cC 561,7
751080228504,04
4 310
=⋅⋅⋅
==πω
nFR
cC 21,24
751080291277,05
5 310
=⋅⋅⋅
==πω
HRl
L µπω
62,18810802
7526415,122 3
0
1 =⋅⋅⋅=⋅=
HRl
L µπω
56,15810802
7506267,144 3
0
1 =⋅⋅⋅=⋅=
kHzff SS 47,1397434,11080 3,0 =⋅⋅=⋅= ω
Výpoet zvlnní penosové charakteristiky v propustném pásmu (ρ = 0,15, tj. 15 %):
dBT 1,0))15,01ln(1log(20))1ln(1log(20 22 ≈−−+=−−+=∆ ρ . (3)
14
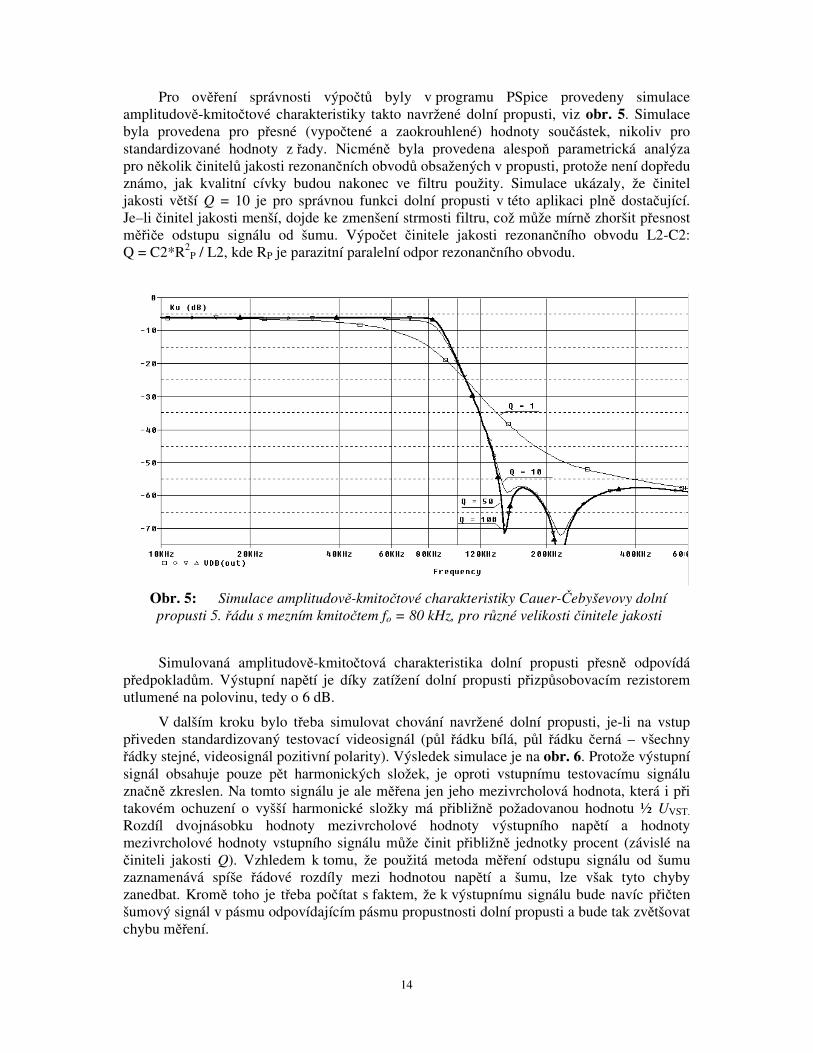
Pro ovení správnosti výpot byly v programu PSpice provedeny simulace amplitudov-kmitotové charakteristiky takto navržené dolní propusti, viz obr. 5. Simulace byla provedena pro pesné (vypotené a zaokrouhlené) hodnoty souástek, nikoliv pro standardizované hodnoty z ady. Nicmén byla provedena alespo parametrická analýza pro nkolik initel jakosti rezonanních obvod obsažených v propusti, protože není dopedu známo, jak kvalitní cívky budou nakonec ve filtru použity. Simulace ukázaly, že initel jakosti vtší Q = 10 je pro správnou funkci dolní propusti v této aplikaci pln dostaující. Je–li initel jakosti menší, dojde ke zmenšení strmosti filtru, což mže mírn zhoršit pesnost mie odstupu signálu od šumu. Výpoet initele jakosti rezonanního obvodu L2-C2: Q = C2*R2
P / L2, kde RP je parazitní paralelní odpor rezonanního obvodu.
Obr. 5: Simulace amplitudov-kmitotové charakteristiky Cauer-ebyševovy dolní propusti 5. ádu s mezním kmitotem fo = 80 kHz, pro rzné velikosti initele jakosti
Simulovaná amplitudov-kmitotová charakteristika dolní propusti pesn odpovídá pedpokladm. Výstupní naptí je díky zatížení dolní propusti pizpsobovacím rezistorem utlumené na polovinu, tedy o 6 dB.
V dalším kroku bylo teba simulovat chování navržené dolní propusti, je-li na vstup piveden standardizovaný testovací videosignál (pl ádku bílá, pl ádku erná – všechny ádky stejné, videosignál pozitivní polarity). Výsledek simulace je na obr. 6. Protože výstupní signál obsahuje pouze pt harmonických složek, je oproti vstupnímu testovacímu signálu znan zkreslen. Na tomto signálu je ale mena jen jeho mezivrcholová hodnota, která i pi takovém ochuzení o vyšší harmonické složky má pibližn požadovanou hodnotu ½ UVST. Rozdíl dvojnásobku hodnoty mezivrcholové hodnoty výstupního naptí a hodnoty mezivrcholové hodnoty vstupního signálu mže init pibližn jednotky procent (závislé na initeli jakosti Q). Vzhledem k tomu, že použitá metoda mení odstupu signálu od šumu zaznamenává spíše ádové rozdíly mezi hodnotou naptí a šumu, lze však tyto chyby zanedbat. Krom toho je teba poítat s faktem, že k výstupnímu signálu bude navíc piten šumový signál v pásmu odpovídajícím pásmu propustnosti dolní propusti a bude tak zvtšovat chybu mení.

15
Obr. 6: Simulace prbhu výstupního naptí na výstupu dolní propusti 5. ádu s mezním kmitotem f0 = 80 kHz, pro krajní velikosti initele jakosti Q; na vstup je piveden standardizovaný testovací videosignál
2.3.3 Horní propust (HP)
Postup návrhu horní propusti je podobný postupu pi návrhu dolní propusti. Je-li HP stejného typu jako DP, tedy CC05 15 35, platí pro výpoet stejné koeficienty, dosazují se ale do jiných vztah pro výpoet hodnot souástek. Lomový kmitoet horní propusti byl zvolen f0 = 200 kHz. Schéma zapojení je na obr. 7.
Obr. 7: Schéma zapojení Cauerovy horní propusti 5. ádu
Vypotené hodnoty pro R1 a R2 = 75 Ω: C1 = 9,97 nF C2 = 104,14 nF C3 = 6,14 nF C4 = 37,22 nF
C5 = 11,62 nF L2 = 47,21 µH L4 = 56,16 µH
kHzff SS 72,1147434,1/10200/ 3,0 =⋅== ω

16
Píklad výpotu kapacity a induknosti:
nFRc
C 97,9751020020642,1
11
11 3
10
=⋅⋅⋅⋅
=⋅⋅
=πω
,
Hl
RL µ
πω21,47
10200226415,175
22 3
0
1 =⋅⋅⋅
=⋅
= .
Ostatní je stejné jako u dolní propusti. Na obr. 8 je simulovaný prbh amplitudov-kmitotové charakteristiky, opt pro nkolik hodnot initele jakosti. Podobn jako u dolní propusti je vhodné dodržet initel jakosti rezonanních obvod roven alespo Q = 10.
Obr. 8: Simulace amplitudov-kmitotové charakteristiky Cauer-ebyševovy horní propusti 5. ádu s mezním kmitotem fo = 200 kHz, pro rzné velikosti initele jakosti
Simulací asového prbhu výstupního naptí vyšel najevo fakt, že testovací videosignál má díky strmým hranám natolik široké spektrum, že jeho ást proniká i na výstup horní propusti. To se projevuje znanými zákmity na výstupu propusti v okamžicích skokových zmn vstupního signálu. Tyto zákmity sice mají v porovnání s velikostí vstupního naptí relativn malou hodnotu a také krátkou dobu trvání, ale je teba si uvdomit, že mený šum má také relativn malou hodnotu. Pitení zákmit k šumu tak mže zpsobit nárst chyby mení. Tento nežádoucí jev je možné ásten potlait temi zpsoby:
a) zvtšením lomového kmitotu filtru HP (nap. na f0 = 500 kHz) b) zmnou testovacího videosignálu tak, aby obsahoval co nejmén strmých hran c) dodatenou softwarovou korekcí
Realizací první varianty, viz. a), dojde ke zmenšení amplitudy a doby trvání zákmit pibližn na polovinu. Nevýhodou je ale zmenšení pásma ve kterém je šum men. Chyba mení tak mže i pes omezení zákmit paradoxn ješt vzrst. To hrozí zejména pi použití

17
videometrického filtru, který zpsobuje, že je meno pedevším pásmo kmitot do 1 MHz. Tímto opatením (zvtšením f0 horní propusti) by bylo mené pásmo šumu zmenšeno na polovinu a výrazn by tak narostla chyba pevodu.
Obr. 9: Simulace parazitního prbhu výstupního naptí na výstupu horní propusti 5. ádu s mezním kmitotem f0 =200 kHz, pro krajní velikosti initele jakosti Q; na vstup je piveden standardizovaný testovací videosignál
Obr. 10: Simulace parazitního prbhu výstupního naptí na výstupu horní propusti 5. ádu s mezním kmitotem f0 =200 kHz, pro krajní velikosti initele jakosti Q; na vstup je piveden nestandardní testovací videosignál

18
Druhá varianta, viz. b), spoívá v použití trojúhelníkového prbhu jasové složky videosignálu, viz. obr. 10. Na obrázku je vidt, že pi použití takového signálu dojde k výraznému potlaení rušivých zákmit, zstávají pouze menší zákmity vznikající v okamžicích zaátku a konce trvání synchronizaních impuls. Nevýhodou této varianty ešení je fakt, že trojúhelníkový prbh není unifikován pro metody mení odstupu signálu od šumu a navíc jej bžné generátory zkušebních obrazc neposkytují.
Existuje ješt tetí možnost ešení v dodatené softwarové korekci, viz. c). V tom pípad by bylo nutno laboratorn zjistit, jaká efektivní hodnota odpovídá zákmitm na výstupu horní propusti (tedy na vstupu pevodníku efektivní hodnoty na stejnosmrné naptí) a tuto hodnotu trvale vložit do pamti mikropoítae (je teba provést stejné mení také pi použití videometrického filtru). Pi mení je pak nutno váhovat uloženou hodnotu velikostí mezivrcholové hodnoty testovacího videosignálu a odeíst od zmené efektivní hodnoty šumu. Metoda pedpokládá použití pouze jednoho typu zkušebního signálu (nejlépe typizovaného).
2.3.4 Videometrický filtr (VMF)
Videometrický filtr ovlivuje spektrální složení meného šumu tak, aby co nejlépe odpovídalo fyziologickému vnímání „zrnní“ v obraze pozorovatelem. V obraze nejrušivji projevuje šum na nízkých kmitotech, proto má videometrický filtr charakter dolní propusti. Na jeho výstupu je pak možno mit spektrum šumu, které se nejrušivji projevuje v obraze. asová konstanta filtru je pro televizní soustavu s 625 ádky τ = 0,33 µs. Je-li R1 = R2 = R, pak τ = L/R = RC. Filtr je zatížen R3 = R.
Obr. 11: Schéma zapojení videometrického filtru pro simulaci
Je-li R1 = R2 = R3 = R = 75 Ω, potom
HRL µτ 75,241033,075 6 =⋅⋅=⋅= − (4)
a dále
nFR
C 4,475
1033,0
6
=⋅==−τ
. (5)
Videometrický filtr zmenšuje namenou hodnotu odstupu signálu od šumu pro „bílý“ šum 2,9 krát (o 9,3 dB) a pro trojúhelníkový šum 7,7 krát (o 17,8 dB) proti širokopásmovému mení.

19
Obr. 12: Amplitudov-kmitotová charakteristika videometrického filtru pro televizní soustavu s 625 ádky
2.3.5 Obnovitel stejnosmrné složky videosignálu (ODC + OSS)
Dvod použití obnovitele stejnosmrné složky signálu (ODC) je podrobn popsán v úvodu kapitoly 2.2. Schéma zapojení obnovitele je na obr. 13. innost obnovitele je popsána v [2]. Jedná se o zdokonalenou variantu jednoduchého upínacího obvodu s diodou, která je v tomto zapojení nahrazena spínaem, tvoeným tranzistorem Q2. Tranzistor se však neotvírá samoinn jako dioda a je proto nutné jej spínat klíovacím signálem.
Obr. 13: Klíovaný obnovitel stejnosmrné složky videosignálu vetn zdroje klíovacích impuls tvoeného separátorem synchronizaní smsi

20
Upínání je požadováno v okamžiku trvání synchronizaních impuls, proto je vhodné tranzistor klíovat synchronizaními impulsy separovanými z kompozitního videosignálu. Výhodnjší by sice bylo klíovat opoždnými synchronizaními pulsy na ernou úrove (viz. úvod kapitoly 2.2), pro jednoduchost se zde však klíuje synchronizaní úrove, která se upíná k nastavenému potenciálu. K separaci synchronizaní smsi slouží integrovaný obvod LM1881 (OSS). Na vstup IN_VIDEO je piveden kompozitní videosignál bez stejnosmrné složky. Na výstupu SYNC_OUT jsou samostatné impulsy s délkou trvání t = 2,4 µs s obrácenou logikou. Tyto impulsy (KEY_PULSE) jsou invertovány a pivedeny na ídící elektrodu tranzistoru a jsou dále pivádny do bloku jednocestného detektoru (popsáno dále). Tranzistor Q1 tak spíná v okamžiku, kdy nastává synchronizaní impuls. Tím je výstup derivaního lánku tvoeného C20 a R32 pipojen k potenciálu nastaveného potenciometrem R40 (standardn 0V). Aby tento potenciál pi sepnutí tranzistoru Q1 nezmnil hodnotu, je udržován kondenzátorem C19, který se v okamžiku sepnutí chová jako zdroj naptí s velmi malým vnitním odporem. Podmínkou je, že jeho velikost musí být mnohem vtší než velikost C20, tedy C19 << C20.
Tohoto zapojení umožuje nastavení upínacího potenciálu potenciometrem R40. Pokud by byl vývod . 1 trimru R40 pipojen k zápornému naptí, bylo by možno nastavit záporné upínací naptí tak, aby na výstupu upínacího obvodu byl rozsah naptí odpovídající oblasti (zatemovací úrove – synchronizaní úrove) záporný, a rozsah naptí odpovídající oblasti (zatemovací úrove – bílá) kladný. Potom je možno následnou jednocestnou detekcí urit mezivrcholovou hodnotu samotného videosignálu bez synchronizaních impuls. Protože ale nelze zaruit, že upínaný testovací kompozitní videosignál bude mít vždy pesn stejnou mezivrcholovou hodnotu 1V, je vhodnjší signál upínat k nule a potom mit mezivrcholovou hodnotu celého kompozitního videosignálu (a hodnotu následn pepoítat softwarov, aby výsledkem byla hodnota rozkmitu samotného videosignálu.). Rezistor R16 zde pedstavuje výstupní odpor zdroje signálu a jeho hodnota by mla být co nejmenší.
2.3.6 Rychlý jednocestný detektor (RJD) a A/D pevodník (A/D p1)
Pro mení mezivrcholové hodnoty videosignálu s obnovenou stejnosmrnou složkou (upnutého ernou úrovní k nule) je vhodné použít rychlý a pesný jednocestný detektor s filtraním kondenzátorem na výstupu, obr. 14.
Obr. 14: Rychlý jednocestný detektor s klíovaným vybíjecím spínaem pipojený k analogov-digitálnímu pevodníku
21
Pro tento úel bylo pevzato a upraveno zapojení z lit. [5]. V zapojení je použit velmi rychlý operaní zesilova AD844. Záporná zptná vazba zstává zachována i pi záporném vstupním naptí, což výrazn zlepšuje dynamické vlastnosti detektoru v porovnání s jinými diodovými usmrovai. Pro UVST > 0 je na výstupu operaního zesilovae kladné naptí U1, dioda D2 je sepnutá. Zptná vazba je uzavena pomocí emitorového sledovae Q4. Znamená to, že výstupní naptí detektoru (katoda D2) je rovno vstupnímu naptí, protože zesílení je rovno jedné. Pro UVST < 0 je na výstupu operaního zesilovae záporné naptí, dioda D2 je rozepnuta. Zptná vazba je ale nadále uzavena pes diodu D1 a platí U1 = -UD1 a výstupní naptí detektoru nulové. Operaní zesilova není v saturaci a jeho reakce pi zmn polarity vstupního naptí je velmi rychlá. „Pamový“ kondenzátor C14 je impedann oddlen od ostatních obvod diodou D2 a ídící elektrodou Q4, takže je vybíjen pouze svodovými proudy, resp. nucen klíovaným spínaem Q3. Je-li Q3 sepnut pokaždé na zaátku následujícího ádku, dojde ped mením mezivrcholové hodnoty naptí videosignálu k nastavení nulových podmínek na C14 a je tak možno zaznamenat pípadný pokles naptí videosignálu. Výstupní naptí je odebíráno s elektrody Source tranzistoru Q4, které kopíruje velikost naptí na kondenzátoru C14. Rezistor R33 a kondenzátor C44 realizují kompenzaci pro velkou kapacitní zátž.
Zapojení se podailo úspšn simulovat v programu PSpice s operaním zesilovaem LM318. Simulace s rychlým zesilovaem AD844 nebyla funkní, zapojení je proto ješt teba vyzkoušet na pokusném vzorku (v pípad neúspchu staí AD844 v navržené desce nahradit bžným zesilovaem se stejným rozmístním vývod, bude-li takový zesilova vyhovovat z hlediska dynamických parametr, napíklad zmínný LM318).
Analogov-digitální pevodník IO3 (ADC0803) je osmibitový pevodník firmy National Semiconductor s osmi tístavovými výstupy urenými k pipojení k datové sbrnici. Obvod je taktován hodinovým signálem CLK_IN (pivedeno z digitální ásti mie), komunikace s procesorem se dje pomocí komunikaních port /WR1, /RD1, CS3. Napájení je teba blokovat tantalovým kondenzátorem.
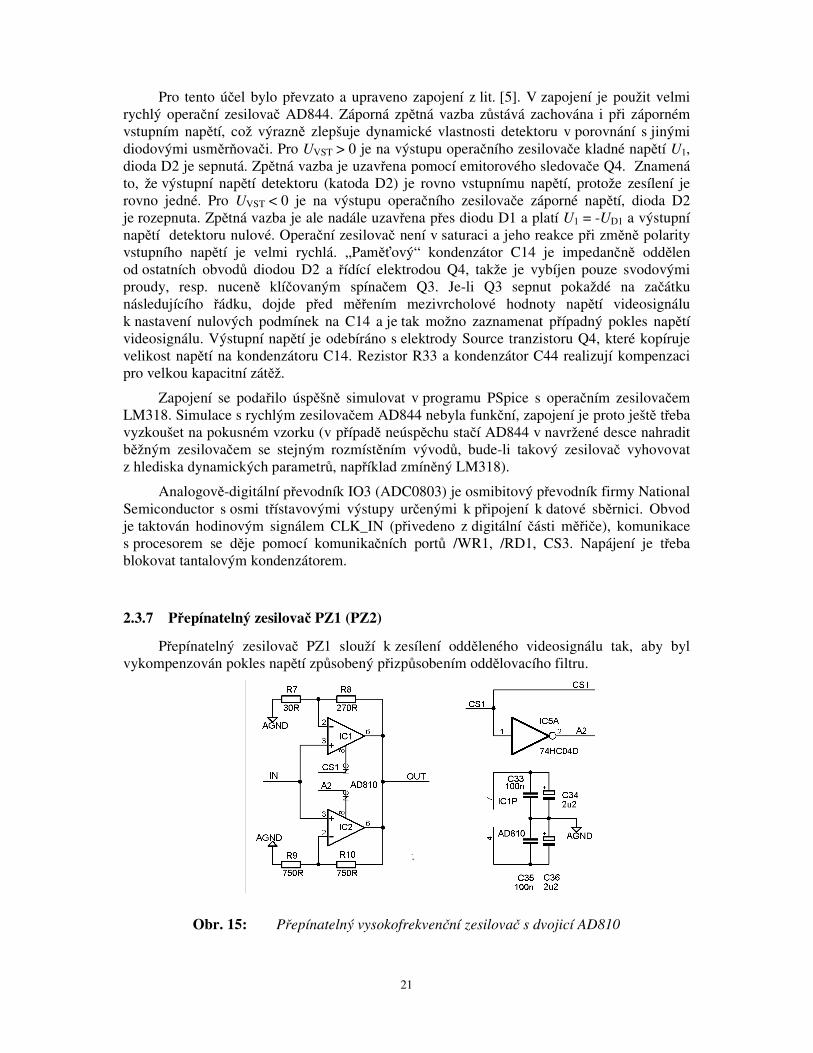
2.3.7 Pepínatelný zesilova PZ1 (PZ2)
Pepínatelný zesilova PZ1 slouží k zesílení oddleného videosignálu tak, aby byl vykompenzován pokles naptí zpsobený pizpsobením oddlovacího filtru.
Obr. 15: Pepínatelný vysokofrekvenní zesilova s dvojicí AD810
22
Pokud by na vstup mie byl pipojen signál s menší mezivrcholovou hodnotou než standardní 1V, je možno pepnout vtší zesílení. Pro tento úel byly použity dva videozesilovae AD810, kde jeden má nastavené zesílení 2x (+ 6 dB) a druhý zesilova 10x (+ 20 dB). Výhodou tohoto uspoádání je fakt, že zptnovazební smyky jsou realizovány s minimálními parazitními induknostmi a kapacitami, které by byly v pípad pepínané odporové sít ve zptné vazb podstatn vtší. Navíc je možno volit optimální (doporuené) hodnoty zptnovazebních rezistor a splnit tak podmínky pro správnou funkci zesilovae (stabilita, vyrovnanost penosu apod.), více informací je v [6]. U operaních zesilova AD810 je možno spojovat výstupy to jednoho uzlu, je však nutno zajistit, aby byl aktivován vždy pouze jeden z dvojice zesilova. Vybavování zesilova se dje vysokou logickou úrovní na pinu 8. Invertor IC5A zajišuje, aby byl vybaven vždy jen jeden z dvojice zesilova. Je-li po ídící sbrnici piveden na vstup CS1 úrove H, je aktivní zesilova IC1 (zesílení + 20 dB), je-li úrove na CS1 zmnna na L, je aktivní zesilova IC2 (zesílení + 6 dB).
Pepínatelný zesilova PZ2 slouží k zesilování šumového signálu na výstupu horní propusti HP. Zapojení je stejné jako u PZ1, liší se pouze jinými hodnotami zesílení (+ 20 dB, resp. + 34 dB) a samostatným ídícím signálem (CS2). Protože jsou oba pepínatelné zesilovae PZ1 a PZ2 na výstupu k následujícím obvodm vázané stídav, není zde nutno provádt kompenzaci ofset zesilova.
2.3.8 Pevodník efektivní hodnoty signálu na stejnosmrné naptí (RMS-DC)
Pevodník zde slouží k urování prmrné efektivní hodnoty šumového signálu. Po realizaci zkušebních vzork a promení vlastností nkolika pevodník byl jako vyhovující pro aplikaci mie odstupu signálu od šumu vybrán analogový integrovaný pevodník AD637. Protože problematika kolem pevodník efektivní hodnoty signálu na stejnosmrné naptí je pomrn rozsáhlá a složitá, je ešení vnována samostatná kapitola diplomové práce.
2.3.9 Celkové zapojení analogové ásti mie signálu od šumu
Na obr. 16 je kompletní schéma zapojení analogové a analogov-digitální ásti mie odstupu signálu od šumu na principu kmitotové separace šumu a zkušebního videosignálu. Jednotlivé bloky (krom RMS-DC) již byly podrobn rozebrány v pedchozích kapitolách. Uspoádání odpovídá blokovému schématu na obr. 1. Miniaturní jazýkové relé K1 slouží k pemosování videometrického filtru VMF v pípad, kdy jeho funkce není žádoucí. Relé je spínáno tranzistorem Q1, který je ovládán mikroprocesorem (signál VMF_OFF na ídící sbrnici).
Deska plošných spoj (obr. 17 – 20) je navržená v systému Eagle jako oboustranná, vtšina souástek je v SMD provedení. Pedpokládá se laboratorní výroba bez prokov, proto jsou prchody deskou (vias) opateny velkými ploškami umožujícími snadné zapájení drátových náhrad prokov. Na desce jsou ti konektory – vstupní BNC, típinový napájecí konektor a dvacetipinový konektor pro pipojení propojovacího kabelu mezi deskou analogové ásti a deskou digitální ásti (která není souástí návrhu). Konektor pipojuje datovou a ídící sbrnici, hodinový signál a napájení mikroprocesoru. Napájení obvod je dlené (digitální VDD a dvojité analogové napájení + 15 V / - 15 V), rozvod zemí je také dlený (digitální GND a analogová AGND). A/D pevodníky jsou na desce stínny po celé ploše analogovou zemí ve vrstv BOTTOM.

23
Obr. 16: Mi odstupu signálu od šumu pro videosignály, podrobné schéma zapojení analogové a analogov-digitální ásti pístroje

24
Obr. 17: Mi odstupu signálu od šumu, vodivý motiv desky plošných spoj; horní strana
(TOP), nápisy musí být itelné
Obr. 18: Mi odstupu signálu od šumu, osazovací plán horní strany (TOP)

25
Obr. 19: Mi odstupu signálu od šumu, vodivý motiv desky plošných spoj; dolní strana (BOTTOM), nápis musí být itelný
Obr. 20: Mi odstupu signálu od šumu, osazovací plán dolní strany (BOTTOM)

26
2.3.10 Rozpiska souástek Pokud se liší hodnoty souástek v rozpisce a v uvedeném schématu zapojení, platné jsou hodnoty v rozpisce! Rezistory SMD – 0805 (5%)
R1 150k R2 1k R3 75R R4 75R R5 75R R6 75R R7 27R R8 270R R9 750R R10 750R R11 30R
R12 1k5 R13 30R R14 270R R15 1M R16 0R0 R17 75R R18 75R R19 75R R20 24k R21 24k R22 51k
R23 1k R24 0R0 R25 0R0 R26 10k R27 1k R28 680k R30 51k R31 75R R32 1M R33 750R
Odporové trimry SMD – 4312 R40 22k R42 47k Kondenzátory keramické SMD – 0805 / 50V (v závorkách jsou uvedeny vypoítané hodnoty) C1 27n (28n) C2 2n7 C3 47n (46n) C4 6n8 (7,6n) C5 22n (24n) C6 3n9 (4n) C7 39n (42n) C8 2n2 (2,5n) C9 15n C10 4n7 C11 150n C12 150n C13 150n C14 2n2 C18 100n
C19 220n C20 4n7 (4,6n) C22 100n C23 100n C24 4n7 (4,4n) C25 100n C27 100n C28 150n C29 100n C30 100n C31 100n C33 100n C35 100n C37 100n C41 150n
C43 150n C44 22p C49 100n C51 100n C53 100n C55 100n C57 100n C59 100n C61 100n C63 100n C65 220n C67 220n C69 100n
Kondenzátory tantalové SMD – 6032 (není-li uvedeno jinak) C15 2u2 / 35V C16 2u2 / 35V C17 2u2 / 35V C21 6u8 / 35V (kapka) C26 10u / 25V C32 10u / 25V
C34 2u2 / 35V C36 2u2 / 35V C38 2u2 / 35V C39 2u2 / 35V C40 2u2 / 35V C42 2u2 / 35V
C54 2u2 / 35V C56 2u2 / 35V C62 2u2 / 35V C64 2u2 / 35V

27
Cívky L1 190uH L2 160uH L3 19uH L4 23uH L5 25uH
Diody SMD (SOD80) D1 BAS83 (Schottky) D2 BAS83 (Schottky) D3 BAS32 D4 BAS32 D5 BAS32
Tranzistory (SOT23) Q1 BSS123 Q2 BSS123 Q3 BSS123 Q4 BSS123 T1 BC817-40
Integrované obvody IC1 AD810 SO8 analog-devices IC2 AD810 SO8 analog-devices IC3 AD810 SO8 analog-devices IC4 AD810 SO8 analog-devices IC5 74HC04D SO14 IC6 AD844 DIL08 analog-devices (nebo LM318) IO1 AD637AR SOIC16R analog-devices IO2 LM1881 SO08 IO3 ADC0801 SO20 IO4 ADC0801 SO20 Ostatní JP1 S2G20 (Lámací dvouadá lišta 20 pin) K1 RR2A12-500 (Relé 12V / 500 Ω) HE751 X1 BNC-Z 50 ….. 1x (BNC konektor 75 Ω – nebo podobný typ) A1944-50 GM ELECTRONIC (objednávkový list) RR-0R SMD ….. 3x RR-27R SMD ….. 1x RR-30R SMD ….. 2x RR-75R SMD ….. 8x RR-270R SMD ….. 2x RR-750R SMD ….. 3x RR-1K SMD ….. 3x RR-1K5 SMD ….. 1x RR-10K SMD ….. 1x RR-24K SMD ….. 2x RR-51K SMD ….. 2x RR-150K SMD ….. 1x RR-680K SMD ….. 1x RR-1M SMD ….. 2x CK-22P NPO ….. 1x CK-2N2 X7R ….. 2x CK-2N7 X7R ….. 1x CK-3N9 X7R ….. 1x CK-4N7 X7R ….. 3x CK-6N8 X7R ….. 1x CK-15N X7R ….. 1x CK-22N X7R ….. 1x CK-27N X7R ….. 1x CK-39N X7R ….. 1x CK-47N X7R ….. 1x
CK-100N X7R ….. 20x CK-150N X7R ….. 6x CK-220N Y5V ….. 3x CT 6M8/35V ..... 1x (Tantal nebo obyejný) CTS 2M2/35V C ….. 13x (Tantal) CTS 10M/25V C ….. 2x (Tantal) BAS83 SMD ….. 2x (Schottky) BAS32 SMD …...3x AD810 SO8 ….. 4x AD844 DIL08 ….. 1x AD637AR SOIC16R ….. 1x ADC0801 SO20 ….. 2x 74HC04D SO14 ….. 1x LM318 DIL08 ….. 1x (místo AD844) 4312-SMD 22K ….. 1x 4312-SMD 47K ….. 1x RR2A12-500 ….. 1x (Relé 12V / 500 Ω) S2G20 ….. 1x (Lámací dvouadá lišta 20 pin) BNC-Z 50 ….. 1x (BNC konektor 75 Ω – nebo podobný typ) BSS123 SMD (N-MOS 6Ω) ….. 4x BC817-40 SMD (NPN h21E = 250-600 pi IC = 100 mA) ….. 1x

28
3 MIE EFEKTIVNÍ HODNOTY SIGNÁLU
Pevodníky efektivní hodnoty signálu na stejnosmrné naptí, známé také jako True RMS (Root Mean Square) pevodníky nebo RMS-DC pevodníky, jsou asto využívány pro rzné jednoúelové aplikace, kde je teba znát efektivní hodnotu meného signálu, pípadn efektivní hodnotu nejrznjších rušivých signál a analyzovat tak jejich výkonové vlastnosti. Obvykle jsou ešeny v podob modulu, na jehož vstup je piveden mený signál a na jeho výstupu je možno mit stejnosmrné konstantní naptí, jehož velikost odpovídá efektivní hodnot meného signálu. Pevodníky jsou využívány zejména pro mení signál složitjšího i nestálého charakteru, u kterých je prostý výpoet z maximální hodnoty a tvaru zdlouhavý nebo málo pesný. Akoli jsou tyto pevodníky v principu jednoduché, je pomrn obtížné je realizovat dostaten rychlé, pesné a s dostaten velkým vstupním dynamickým rozsahem. astým problémem také bývá omezená schopnost pevodu signál s velkým initelem výkyvu CF (Crest Factor), jejichž efektivní hodnota je mnohem menší než amplituda (CF = U/URMS). Dležitým parametrem je také schopnost pevodu signál vetn jejich stejnosmrné složky. Levné a jednoduché analogové pevodníky mají zpravidla na vstupu stídavou vazbu, do výsledného pevodu není zahrnuta stejnosmrná složka a mení je tak zatíženo chybou. Z tchto dvod výrobci True RMS pevodníky vybavují spíše laboratorní micí pístroje vyšší cenové kategorie nebo speciální jednoúelové pístroje. Levné penosné multimetry jimi zpravidla vybaveny nejsou.
Hlavní náplní této ásti diplomové práce bylo vybrat vhodný typ pevodníku pro aplikaci v mii odstupu signálu od šumu pro videosignály, popsaného v pedchozí kapitole. Pi ešení tohoto úkolu byly postaveny a promeny celkem tyi pokusné moduly. Dva moduly byly osazeny obvody AD734, jeden modul obvodem AD8361 a zbývající modul obvodem AD637. Ukázalo se, že ze zkoumaných pevodník vyhovuje po všech stránkách pouze obvod AD637 aplikaci v mii odstupu signálu od šumu.
Úvod kapitoly je doplnn o strunou teorii obsahující obecnou matematickou definici efektivní hodnoty a dále o soubor jednoduchých výpoetních pomcek sloužících pro výpoet efektivní hodnoty základních typ signál (obdélníkové prbhy s rznou stídou a stejnosmrnou složkou, harmonické prbhy a trojúhelníkové prbhy). Tyto signály (zejména obdélníkové) je výhodné používat pro zjišování vlastností pevodník a jednou z možností zpracování výsledk je porovnávání zmené hodnoty s efektivní hodnotu micího signálu, vypoítanou pomocí zmínných jednoduchých vztah. Dále je zde uveden struný pehled ostatních známých metod mení efektivní hodnoty.
3.1 MATEMATICKÁ DEFINICE EFEKTIVNÍ HODNOTY Podle [7] a [8] je efektivní hodnota periodicky promnného proudu i(t) je rovna
stejnosmrnému proudu I, který v odporu vyvine za uritou dobu stejné teplo jako proud i(t)
( ) 2
0
2 ITRdttiRQT
T ⋅⋅=⋅= . [J] (6)
Z této fyzikální definice vychází ekvivalentní matematická definice:

29
+
=Tt
tvstef dttu
TU )(*
1 2 , [V] (7)
kde T je perioda, je-li vstupní naptí periodického charakteru. Úpravou tohoto výrazu dostaneme:
+
=Tt
tvstef dttu
TU )(*
1 22 [V] (8)
a další úpravou:
ef
Tt
tvst
ef U
dttuT
U+
=)(*
1 2
. [V] (9)
Ve výrazu (9) je efektivní hodnota Uef vyjádena implicitn, což na této funkci nic nemní, rozdíl je pouze v tom, že není teba poítat odmocninu.
Je-li vstupní signál periodického charakteru, lze prbh naptí rozložit ve Fourierovu adu a efektivní hodnotu pak vyjádit vztahem:
∞
=+=
1
220
kkef UUU , [V] (10)
kde je U0 …………….…. stejnosmrná složka signálu [V],
Uk = Ukm/(21/2) ….. efektivní hodnota k-té harmonické složky [V],
Ukm ……………… amplituda k-té harmonické složky [V].
3.2 VÝPOET EFEKTIVNÍ HODNOTY SIGNÁL ZÁKLADNÍCH TVAR K ovování vlastností mi efektivní hodnoty se s výhodu používají testovací signály
základních prbh (jako jsou obdélníkové, trojúhelníkové, pilové a harmonické prbhy), u kterých je snadné spoítat jejich efektivní hodnotu pomocí jednoduchých matematických vztah a tu pak porovnávat s údajem na výstupu pevodníku.
Velmi praktickým testovacím signálem je obdélníkový prbh, u kterého lze mnit krom základního kmitotu také stídu a dále stejnosmrnou složku. Možnost nastavení stídy obdélníkového signálu je zde velmi dležitá, protože umožuje stanovit schopnost pevodníku zpracovávat signály s rzným initelem výkyvu. initel výkyvu (Crest Factor) je definován jako pomr amplitudy a efektivní hodnoty meného signálu CF = U/Uef a je tím vtší, ím vtší je rozdíl maximální hodnoty signálu a jeho efektivní hodnoty. Nejmenší

30
initel výkyvu má konstantní stejnosmrné naptí, u kterého se jeho velikost rovná efektivní hodnot. Pro názornost je zde uvedeno nkolik základních obdélníkových prbh a zpsob výpotu efektivní hodnoty.
1) Symetrický obdélníkový signál
U symetrického obdélníkového signálu se velikost kladného pulsu rovná velikosti záporného pulsu, tedy +UP = -UP. Tento signál má tu zvláštnost, že se jeho efektivní hodnota vždy rovná velikosti +UP. Na obr. 21a je znázornn prbh základního obdélníkového signálu se stídou S = 0,5. Vpravo je zobrazen prbh inného výkonu na rezistoru. Je zejmé, že inný výkon je stejný v obou plperiodách, a byl by stejný i pípad, že by na tomtéž rezistoru bylo pivedeno stejnosmrné naptí o konstantní velikosti rovné +UP nebo -UP. Totéž platí i pro signály s libovolnou stídou, zde napíklad S = 0,1 (obr. 21b) a S = 0,9 (obr. 21c). Liší se pouze tím, že obsahují nenulovou stejnosmrnou složku (dané rozdílem ploch S1 a S2).
Obr. 21: asové prbhy symetrických obdélníkových signál o stídách a) 0,5 ; b) 0,1; c) 0,9 a jim odpovídající asové prbhy inného výkonu na rezistoru
Stejnosmrná složka (stední hodnota) symetrického obdélníkového signálu jako funkce stídy:
)()1()()( PPDC USUSSU −+ ⋅−+⋅= . [V] (11)

31
Z výrazu (11) je zejmé že popisovaný signál má nulovou stejnosmrnou složku pouze v pípad, že stída je rovna S = 0,5.
initel výkyvu symetrického obdélníkového signálu je roven CF = 1, stejn jako u stejnosmrného konstantního naptí.
Efektivní hodnota symetrického obdélníkového signálu je rovna Uef = +Up = |-Up| (12a)
inný výkon na odporové zátži je v tomto pípad roven:
R
UtPP P
2
)( == . [W] (12b)
2) Obdélníkový signál upnutý k nulové úrovni: Jde o signál s pitenou stejnosmrnou úrovní, která je velikostí rovna Uss = +Up resp.
Uss = -Up. Tímto opatení dojde k posunu signálu ist do kladné, resp. záporné oblasti, signál je tedy upnut k nulové úrovni jak je vidt na obr 22.
Obr. 22: asové prbhy obdélníkových impuls o stídách a) 0,5 ; b) 0,1; c) 0,9 upnutých k nulové úrovni a jim odpovídající asové prbhy inného výkonu na rezistoru

32
Stejnosmrná složka obdélníkového signálu upnutého k nule jako funkce stídy:
)()( SSPDC UUSSU +⋅= . [V] (13)
Z výrazu (13)je zejmé, že popisovaný signál má vždy nenulovou stejnosmrnou složku.
initel výkyvu obdélníkového signálu upnutého k nule je roven
S
CF1= . [-] (14)
Efektivní hodnota obdélníkového signálu upnutého k nule je rovna
SUUU SSPef ⋅+= )( . [V] (15)
Okamžitý inný výkon na odporové zátži je v tomto pípad roven:
R
UtP P
2
)( = [W] (16)
a prmrný inný výkon na odporové zátži je roven
RUR
UT
P efT
P
⋅==
21
[W]. (17)
3) Efektivní hodnota symetrického obdélníkového signálu pivedeného k zátži
stídavou vazbu: Nkteré pevodníky efektivní hodnoty signálu na stejnosmrné naptí vyžadují
z funkních dvod pipojení signálu pouze stídavou vazbou. Je-li takovým pevodníkem men signál s nenulovou stejnosmrnou složkou (popsáno výše), dojde k potlaení stejnosmrné složky a tím k výrazné chyb pevodu. V tomto a následujícím bod jsou analyzovány tytéž prbhy jako v bodech 1 a 2 pedchozího popisu, rozdíl je pouze v pipojení zátže ke generátoru.
V tomto pípad je zdrojem signálu generátor symetrického obdélníkového signálu, podobn jako v bod 1. Na obr. 23 je znázornn prbh generátoru, vedle je prbh naptí na zátži (za stídavou vazbou) a konen je zobrazen prbh inného výkonu na zátži. Díky stídavé vazb mají kladné a záporné impulsy stejné plochy S1 a S2. Nepomr ploch impuls zobrazujících prbh inného výkonu je dán kvadratickou závislostí výkonu na naptí.
Stejnosmrná složka (stední hodnota) symetrického signálu pipojeného k zátži pes stídavou vazbu je rovna nule: UDC = 0
initel výkyvu obdélníkového signálu s upnutého k nule je roven
S
CF1= . [-] (18)
Vztah pro výpoet inného výkonu a efektivní hodnoty (bez použití integrálu) je v tomto pípad složitjší a vyžaduje odvození. V prvním kroku je teba urit inný výkon v kladné plperiod a inný výkon v záporné plperiod.
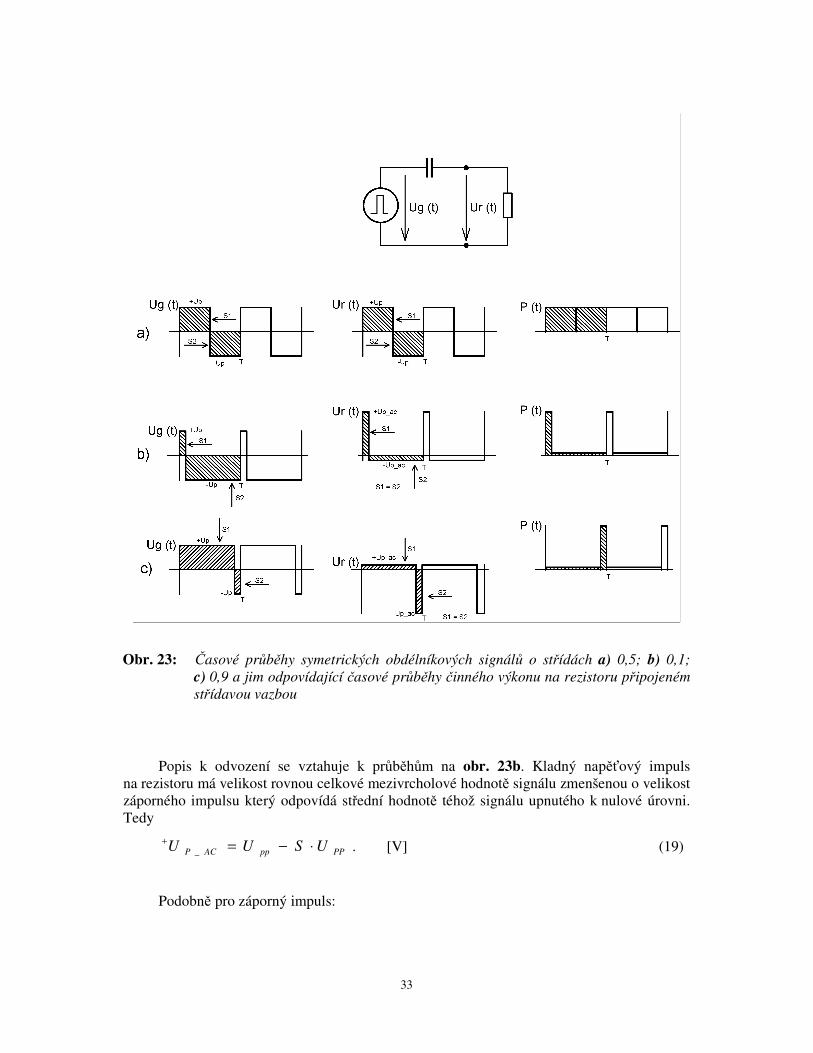
33
Obr. 23: asové prbhy symetrických obdélníkových signál o stídách a) 0,5; b) 0,1; c) 0,9 a jim odpovídající asové prbhy inného výkonu na rezistoru pipojeném stídavou vazbou
Popis k odvození se vztahuje k prbhm na obr. 23b. Kladný napový impuls na rezistoru má velikost rovnou celkové mezivrcholové hodnot signálu zmenšenou o velikost záporného impulsu který odpovídá stední hodnot téhož signálu upnutého k nulové úrovni. Tedy
PPppACP USUU ⋅−=+_ . [V] (19)
Podobn pro záporný impuls:

34
SUUUSUUUU PPppPPppPPACPACP ⋅=−⋅−=−= +− )(__ [V]. (20)
inný výkon se pak spoítá jako souet inných výkon (obou impuls) váhovaných jejich dobou trvání:
R
SU
R
SUP ACPACP
)1()()( 2_
2_ −⋅
+⋅
=−+
. [W] (21)
Je-li rezistor R = 1 Ω, potom
)1()()( 2_
2_ SUSUP ACPACP
−⋅+⋅= −+ [W] (22)
a souasn efektivní hodnota
ef PU = . [V] (23)
Po dosazení (22) do (23):
)1()()( 2_
2_ SUSUU ACPACPef −⋅+⋅= −+ [V] (24)
a po dosazení (19) a (20) do (24):
)1()(()( 22 SSUSUSUU PPPPPPef −⋅⋅+⋅⋅−= . [V] (25)
Porovnáním vztah (12a) a (25) je vidt, že efektivní hodnota symetrického obdélníkového signálu je rzná, je-li piveden k zátži pímo nebo stídavou vazbou. Rovnost nastává pouze pi stíd S = 0,5; v ostatních pípadech je efektivní hodnota za stídavou vazbou vždy menší než ped stídavou vazbou.
4) Obdélníkový signál upnutý k nulové úrovni pipojený k zátži stídavou
vazbou:
Odpovídající prbhy naptí a inného výkonu jsou na obr. 24. Porovnáním z obr. 23 je vidt, že za stídavou vazbou jsou prbhy shodné. Díky stídavé vazb nezáleží na velikosti pirozené nebo dodaten pitené stejnosmrné složky pulsního signálu.
Pro velikost efektivní hodnoty platí opt vztah (25). Pro úplnost je možno ješt uvést vztah pro výpoet initele výkyvu obdélníkového signálu za stídavou vazbou:
)1()(()( 22 SSUSUSU
UUU
CFPPPPPP
P
ef −⋅⋅+⋅⋅−== . [-] (26)

35
Obr. 24: asové prbhy obdélníkových signál upnutých na nulu, o stídách a) 0,5; b) 0,1; c) 0,9 a jim odpovídající asové prbhy inného výkonu na rezistoru pipojeném stídavou vazbou
5) Harmonický a trojúhelníkový signál bez stejnosmrné složky:
Harmonický signál lze pro testování RMS-DC pevodníku s výhodou použít pi promování jeho kmitotového rozsahu, protože obsahuje pouze jednu harmonickou složku. Spolenou nevýhodou harmonického a trojúhelníkového signálu pro testování pevodníku je stálý initel výkyvu tchto signál, který nelze mnit jako u obdélníkového signálu upnutého k nule (zmna initele výkyvu se provádí zmnou stídy). K dkladnému promení pevodníku tak staí použít obdélníkový, harmonický a pípadn šumový signál. Použití trojúhelníkového testovacího signálu nepináší žádné výrazné výhody.
Pro efektivní hodnotu a initel výkyvu harmonického signálu platí (viz. [6]):
2
UU
SINef = [V] (27)

36
a souasn platí
414,1==SINef
SIN UU
CF . [-] (28)
Pro efektivní hodnotu a initel výkyvu trojúhelníkového signálu platí:
3U
UTRIef = [V] (29)
a souasn platí
73,1==TRIef
TRI UU
CF . [-] (30)
3.3 METODY MENÍ EFEKTIVNÍ HODNOTY
3.3.1 Mení efektivní hodnoty magnetoelektrickým micím ústrojím:
Nejjednodušší metoda, ale s velmi omezeným použitím. Je používána u rukových voltmetr (ampérmetr). Magnetoelektrické ústrojí reaguje na stední hodnotu usmrnného vstupního signálu uvst. Stupnice pístroje je pak cejchována pímo v efektivní hodnot. Nevýhodou je, že pístroj ukazuje správnou efektivní hodnotu pouze pro prbh naptí pi nmž byl cejchován (obvykle harmonický), což je zásadní omezení.
3.3.2 Mení efektivní hodnoty tepelnými metodami:
vycházejí z definice efektivní hodnoty, že totiž efektivní hodnota proudu procházejícího rezistorem na nm vyvolá tytéž tepelné úinky, jako stejnosmrný konstantní proud o velikosti odpovídající efektivní hodnot proudu meného signálu. Takové pevodníky bývají obvykle realizovány pracovním rezistorem na který je tepeln navázán vhodný teplotní sníma. Pracovní rezistor je ohíván proudem vstupního signálu a jeho termodynamická teplota odpovídá práv efektivní hodnot vstupního signálu. Absolutní teplota je pak snímaem zpravidla pevedena na stejnosmrné naptí. Používá se asto u vysokofrekvenních aplikací (nap. vysílae), kde jiné metody již nelze použít.
Dokonalejší metoda spoívá v použití spažených termolánk, viz. obr. 25, podle [9], využívá dvou vzájemn tepeln izolovaných termolánk, z nichž jedním prochází proud s okamžitou hodnotou úmrnou menému naptí uvst a druhým prochází díky zptnovazební smyce stejnosmrný proud z diferenciálního zesilovae, úmrný efektivní hodnot uin. Je-li teplota TM2 rovna teplot TM1 (tj. Iss = ist, kde ist je úmrné uin.), jejich termoelektrická naptí se vzájemn vyruší a na vstupu diferenciálního zesilovae je pak nulové naptí.

37
Obr. 25: Mení efektivní hodnoty tepelnou metodou spažených termolánk
Nevýhodou tepelných metod je pedevším dlouhá odezva ustálení pevodník a jejich malá odolnost proti petížení.
3.3.3 Digitální pevodníky
Existují i další typy pevodník pracujících na principu vzorkování signálu a následného zpracování procesorem. asto tak bývají souástí digitálních osciloskop a jejich pesnost je dána pedevším hustotou vzorkování a velikostí kroku kvantování pi A/D pevodu.
3.3.4 Poítací analogové pevodníky
Oproti digitálním pevodníkm konstrukn mnohem jednodušší a podstatn levnjší. Existují dva základní typy poítacích pevodník. Tzv. explicitní pevodníky realizují funkci podle vztahu (7) a tzv. implicitní (nebo také zptnovazební) pevodníky realizují funkci podle vztahu (9). Výsledek je stejný, ale pro vtší dynamický rozsah bývají astji používány implicitní pevodníky.
Obr. 26: Blokové schéma explicitního pevodníku (Legenda: X2 – kvadrátor, DP – dolní propust, následuje blok výpotu odmocniny)
Na obr. 26 je znázornn princip funkce explicitního pevodníku. První blok je tvoen analogovou násobikou ve funkci kvadrátoru, následuje pasivní dolní propust která z umocnného vstupního signálu vytvoí stední hodnotu (tj. uritý integrál v rámci jedné periody signálu) a následuje blok poítající odmocninu na jehož výstupu je již žádané stejnosmrné naptí odpovídající efektivní hodnot vstupního naptí.
38
3.4 RMS-DC PEVODNÍK S AD734 V DOPORUENÉM ZAPOJENÍ Integrovaný obvod AD734 (Analog Devices) je speciální souástka urená pro rzné
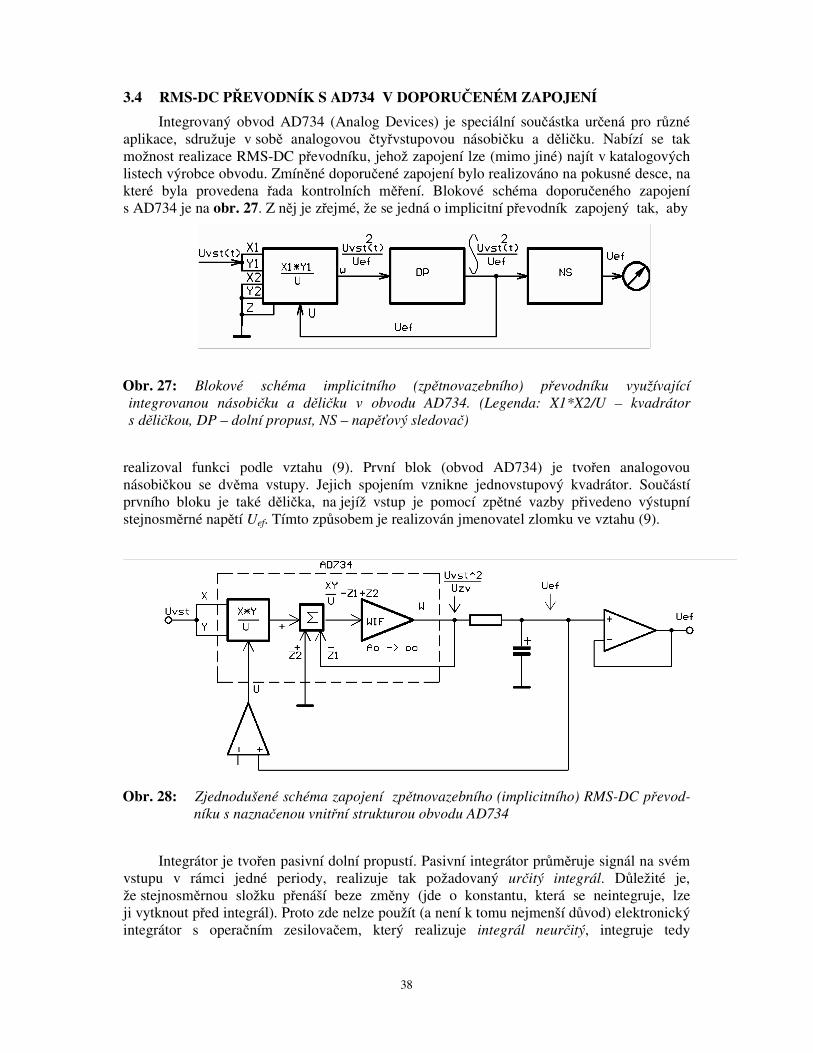
aplikace, sdružuje v sob analogovou tyvstupovou násobiku a dliku. Nabízí se tak možnost realizace RMS-DC pevodníku, jehož zapojení lze (mimo jiné) najít v katalogových listech výrobce obvodu. Zmínné doporuené zapojení bylo realizováno na pokusné desce, na které byla provedena ada kontrolních mení. Blokové schéma doporueného zapojení s AD734 je na obr. 27. Z nj je zejmé, že se jedná o implicitní pevodník zapojený tak, aby
Obr. 27: Blokové schéma implicitního (zptnovazebního) pevodníku využívající integrovanou násobiku a dliku v obvodu AD734. (Legenda: X1*X2/U – kvadrátor s dlikou, DP – dolní propust, NS – napový sledova)
realizoval funkci podle vztahu (9). První blok (obvod AD734) je tvoen analogovou násobikou se dvma vstupy. Jejich spojením vznikne jednovstupový kvadrátor. Souástí prvního bloku je také dlika, na jejíž vstup je pomocí zptné vazby pivedeno výstupní stejnosmrné naptí Uef. Tímto zpsobem je realizován jmenovatel zlomku ve vztahu (9).
Obr. 28: Zjednodušené schéma zapojení zptnovazebního (implicitního) RMS-DC pevod-
níku s naznaenou vnitní strukturou obvodu AD734
Integrátor je tvoen pasivní dolní propustí. Pasivní integrátor prmruje signál na svém vstupu v rámci jedné periody, realizuje tak požadovaný uritý integrál. Dležité je, že stejnosmrnou složku penáší beze zmny (jde o konstantu, která se neintegruje, lze ji vytknout ped integrál). Proto zde nelze použít (a není k tomu nejmenší dvod) elektronický integrátor s operaním zesilovaem, který realizuje integrál neuritý, integruje tedy

39
kontinuáln. Protože se jedná o neuritý integrál, nebyla by dodržena matematická definice efektivní hodnoty. Navíc by po pivedení signálu se stejnosmrnou složkou došlo bhem krátké chvíle k jeho saturaci, protože by integroval i stejnosmrnou složku. Naproti tomu pasivní integrátor tvoený dolní propustí, buzený zdrojem naptí s malým vnitním odporem, se stídav nabíjí a vybíjí do tohoto zdroje a naptí na kondenzátoru kolísá kolem stední hodnoty signálu na vstupu dolní propusti. Pi dostaten nízkém mezním kmitotu dolní propusti o dostaten vysokém kmitotu vstupního signálu je kolísání kolem stední hodnoty zanedbatelné a výstupní prbh lze považovat za konstantní. Výstupní naptí dolní propusti je na výstupní svorky pivedeno pes napový sledova, aby prmrování nebylo zkresleno parazitním vybíjením kondenzátoru do vnitního odporu použitého voltmetru. Operaní zesilova na vstupu dliky je souástí zdroje proudu ízeného naptím, protože dlika vyžaduje proudové buzení, ale pro další popis bude za vstup dliky považován vstup tohoto zdroje.
3.4.1 Mení vlastností RMS-DC pevodníku s AD734 v doporueném zapojení
Na pokusné desce byla realizována celá ada mení, ve snaze získat pedstavu o rozsahu použitelnosti takového pístroje. Následuje struný popis nkolika zjištných skuteností:
• Stejnosmrná pevodní charakteristika AD734 Na vstup pevodníku je pivedeno stejnosmrné naptí o velikosti 0 – 12 V. Naptí
na výstupu by mlo být po ustálení rovno naptí na vstupu. Ve skutenosti pi Uvst< 0,2 V výrazn narstá relativní chyba (projevuje se absolutní chyba pevodníku -
-0,50,00,51,01,52,02,53,03,54,04,55,0
0,01 0,1 1 10 100Vstupní stejnosmrné naptí Uvst [V]
Chy
ba pe
vodu
[%]
Obr. 29: Procentní odchylka výstupního naptí od vstupního stejnosmrného naptí; (je-li na vstup pevodníku pivedeno kladné konstantní stejnosmrné naptí, mlo by výstupní naptí mít stejnou hodnotu)

40
- výstupní napový ofset). Pi velkých naptích (|Uvst| > 11 V) se výstup naopak dostane do saturace, piemž do normálního stavu se vrátí až pi poklesu |Uvst| pod 9 V. V rozmezí hodnot vstupních signál |Uvst| ∈ 1 - 11 V je relativní chyba malá (do 0,2 %).
• Závislost chyby pevodu AD734 na kmitotu meného signálu Jedná se o mení odchylky výstupního naptí od požadované hodnoty v závislosti
na kmitotu a amplitud micího signálu. Jako micí signál byl použit symetrický (+ Up = -Up) harmonický signál a symetrický obdélníkový signál, tedy o signály s malým a konstantním initelem výkyvu. Zmené charakteristiky jsou na obr. 30 a obr. 31.
-2-10123456
0,01 0,1 1 10 100 1000 10000 100000
f [ kHz ]
Chy
ba [
%]
Obdélník 200 mVpp
Obdélník 2 Vpp
Obdélník 10 Vpp
Obr. 30: Závislost relativní chyby pevodu RMS-DC pevodníku s AD734 v základním zapojení na kmitotu a amplitud symetrického obdélníkového signálu o stíd S = 0,5
-2-10123456
0,01 0,1 1 10 100 1000 10000 100000
f [ kHz ]
Chy
ba [
%]
Sinus 200 mVpp
Sinus 2 Vpp
Sinus 10 Vpp
Obr. 31: Závislost relativní chyby pevodu RMS-DC pevodníku s AD734 v základním zapojení na kmitotu a amplitud symetrického harmonického signálu

41
Z charakteristik lze vyíst závislost kmitotového rozsahu pevodníku na amplitud testovacího signálu. S rostoucí amplitudou se rozšiuje kmitotový rozsah pevodníku. Spokojíme-li se s relativní chybou do 2 %, lze pevodník v doporueném zapojení použít pro mezivrcholové hodnoty uvst ≈ 2 Vpp do kmitotu cca 1 MHz a pro uvst ∈ 10 – 20 Vpp do kmitotu 10 MHz.
• Reakní doba kvadrátoru a dliky AD734 Výsledkem mení je množství výsledk pro rzné pracovní režimy a rzné typy
signál. Obecn platí, že pro pulsní signály je nutná doba trvání pulsu min. 0,1 µs a to ješt pi dostaten velké amplitud signál (tj. pibližn uvst > 2 VPP).
• Zvlnní výstupního naptí pi nízkých kmitotech Vzhledem k asové konstant integrátoru (cca 1 s) dochází k tomu, že pi nízkých
kmitotech, ádov jednotky až desítky Hz, nedává integrátor na svém výstupu konstantní, stední hodnotu naptí. Výstupní naptí je zvlnné a pohybuje se kolem stední hodnoty. Zvlnní na nízkých kmitotech lze eliminovat zvtšením kapacity C4 nebo odporu R1, toto opatení má však za následek prodloužení doby ustálení výstupního naptí pi zmn charakteru vstupního signálu.
• Závislost pesnosti pevodu RMS-DC pevodníku s AD734 v základním zapojení na initeli výkyvu (resp. stíd) obdélníkového testovacího signálu Krom symetrického obdélníkového signálu, u kterého zmna stídy nemá žádný vliv
na tvar prbhu signálu na vstupních svorkách integrátoru (po usmrnní kvadrátorem jde již o vyhlazený stejnosmrný signál), funguje pevodník správn pro ostatní tvary vstupních
-70
-60
-50
-40
-30
-20
-10
00 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Stída S [-]
Chy
ba pe
vodu
[%]
Uvst = 200 mVpp, DC offset = 100 mV, f = 100kHz
Obr. 32: Závislost relativní chyby Uvýst na stíd (initeli výkyvu) testovacího signálu
tvoeného obdélníkovými pulsy upnutými k nulovému potenciálu

42
signál jen pi initeli výkyvu 1 < CF < 1,4 (to odpovídá stíd 1 > S > 0,55 unipolárních obdélníkových puls), jak je vidt na obr. 32. Pi jiných stídách chyby mení výrazn narstají. Je to zpsobeno tím, že na výstupu RC lánku v dolní propusti je pi malých stídách malé naptí, které dlika špatn zpracovává.
• Napová závislost dliky AD734 Ve snaze vysvtlit vznik velkých chyb pi pevodu signál o malé stíd byla zjištna
závislost funkce dliky na výstupním (zptnovazebním) naptí a naptí na vstupu integrátoru pro nkolik rzných vstupních naptí. Výsledné statické charakteristiky jsou na obr. 33. Jsou to závislosti výstupního naptí na kvadrátoru a dliky na naptí pivedeném na vstup dliky z regulovatelného externího zdroje. Charakteristiky by v ideálním pípad mly být hyperboly, ve skutenosti však má dlika prbhy ideáln hyperbolické vždy jen v uritém rozsahu naptí na vstupu dliky. Podrobnjším rozborem hraniních hodnot jednotlivých hyperbol bylo zjištna obecná podmínka, že pro správnou funkci dliky je nutné, aby naptí na jejím vstupu nebylo o více jak 25 % nižší než naptí na výstupu
0123456789
101112131415
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Jmenovatel: Uzv [V]
Výs
tup
dli
ky:
Uvs
t^2
/ Uzv
[V]
0
1
2
3
4
5
6
7
8
9
10
11
(*) K
onst
antn
í vst
. naptí:
Uvs
t [V
]
Ideal. pro Uvst = 2; 5; 7; 10 VSkut. pro Uvst = 2; 5; 7; 10 V
Obr. 33: Charakteristiky znázorující rzné pracovní a nepracovní oblasti dliky (pravá svislá osa Uvst pedstavuje konstantní naptí na vstupu kvadrátoru; pro každou kivku platí vždy ta hodnota na ose, ke které smuje vodorovný úsek dané charakteristiky, levá osa pedstavuje pímo hodnoty naptí na výstupu odpovídající jednotlivým charakteristikám v závislosti na velikosti Uzv)
43
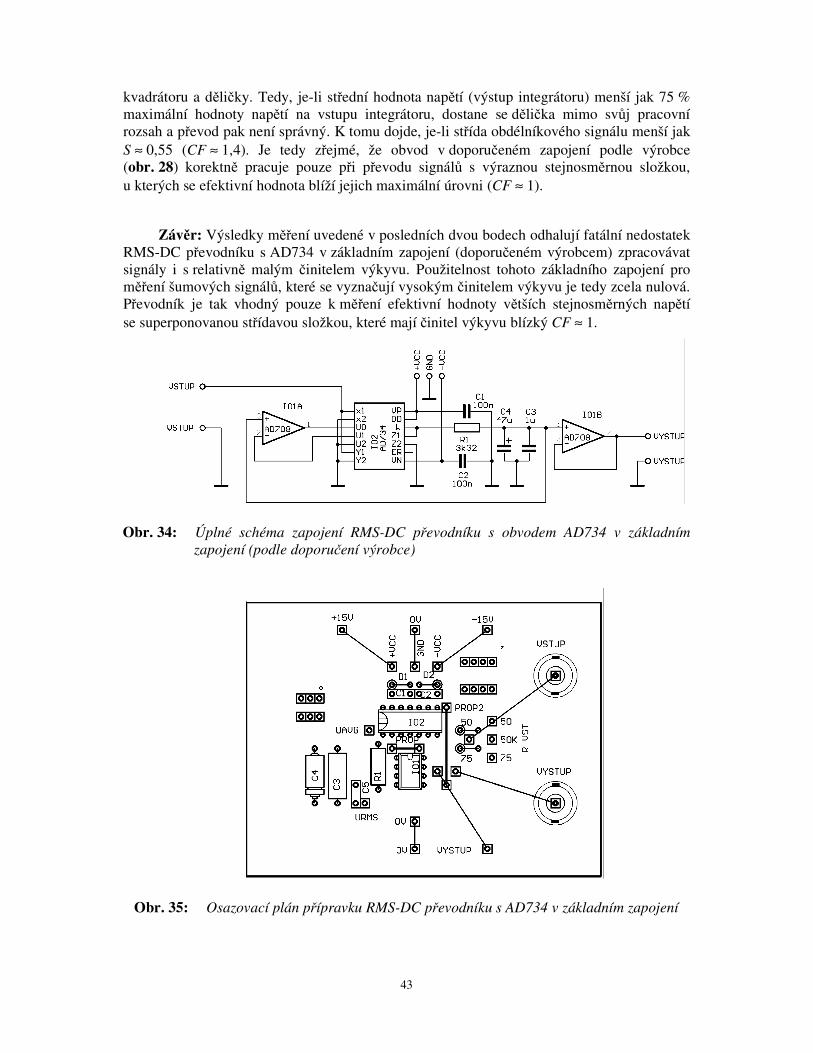
kvadrátoru a dliky. Tedy, je-li stední hodnota naptí (výstup integrátoru) menší jak 75 % maximální hodnoty naptí na vstupu integrátoru, dostane se dlika mimo svj pracovní rozsah a pevod pak není správný. K tomu dojde, je-li stída obdélníkového signálu menší jak S ≈ 0,55 (CF ≈ 1,4). Je tedy zejmé, že obvod v doporueném zapojení podle výrobce (obr. 28) korektn pracuje pouze pi pevodu signál s výraznou stejnosmrnou složkou, u kterých se efektivní hodnota blíží jejich maximální úrovni (CF ≈ 1).
Závr: Výsledky mení uvedené v posledních dvou bodech odhalují fatální nedostatek RMS-DC pevodníku s AD734 v základním zapojení (doporueném výrobcem) zpracovávat signály i s relativn malým initelem výkyvu. Použitelnost tohoto základního zapojení pro mení šumových signál, které se vyznaují vysokým initelem výkyvu je tedy zcela nulová. Pevodník je tak vhodný pouze k mení efektivní hodnoty vtších stejnosmrných naptí se superponovanou stídavou složkou, které mají initel výkyvu blízký CF ≈ 1.
Obr. 34: Úplné schéma zapojení RMS-DC pevodníku s obvodem AD734 v základním zapojení (podle doporuení výrobce)
Obr. 35: Osazovací plán pípravku RMS-DC pevodníku s AD734 v základním zapojení

44
Obr. 36: Vodivý motiv desky plošných spoj RMS-DC pevodníku s AD734 v základním
zapojení; skutený pohled ze strany spoj, delší rozmr desky l = 100 mm
Obr. 37: Provedení pípravku RMS-DC pevodníku s AD734

45
3.5 VYLEPŠENÍ ZÁKLADNÍHO ZAPOJENÍ RMS-DC PEVODNÍKU S AD734 Pi realizaci True RMS pevodníku s obvodem AD73415AN v základním zapojení
doporueném výrobcem se vyskytla ada problém, jak je zejmé z výsledk provedených mení. Nejvtším nedostatkem takto realizovaného pevodníku byla neschopnost zpracovávat signály s velkým initelem výkyvu (CF), tedy signály, jejichž efektivní hodnota vi špikové je relativn malá (napíklad obdélníkové pulsy s malou stídou nebo šum). Analýzou obvodových vlastností pevodníku s AD734 však bylo zjištno, že tento problém je snadno ešitelný úpravou a následnou kompenzací napových pomr za integrátorem a na vstupu dliky. Provedené úpravy jsou popsány v následujících bodech.
3.5.1 Optimalizace pracovního režimu dliky AD734
Obvodová úprava (obr. 38, 39) spoívá ve zvtšení naptí pivádného na vstup dliky pomocným stejnosmrným zesilovaem o zesílení Au = N, piemž hodnota zesílení je volena tak, aby zesílené naptí N*Uef splovalo již zmínnou podmínku 0,75*Uvst < N*U. Vzroste-li initel výkyvu meného signálu, je teba zvtšit zesílení N. Protože je po této úprav signál dlen naptím N*Uef, je nutné provést korekci tak, aby se ve výsledné funkci konstanta N vykrátila. ešení spoívá v zaazení dalšího zesilovae o stejném zesílení na výstup dolní propusti.
Na vývojové desce pevodníku byly realizovány pomocné zesilovae se zanedbatel-nými ofsety a pepínatelným zesílením o pesných velikostech N = 1, 2, 3, 5 a 10. Zenerova dioda D1 o naptí 10 V limituje maximální naptí na vstupu dliky a zabrauje tak nežádoucímu zablokování dliky, ke kterému by došlo pi pekroení naptí asi 11 V. Zablokování dliky má totiž hysterezní charakter (viz. obr. 29), pro návrat do standardního režimu je teba pokles zptnovazebního naptí pod 9 V. Neperoste-li zptnovazební naptí úrove 10 V, je proud z výstupu pomocného zesilovae tém nulový. Nevznikají tak nežádoucí úbytky na pracovním rezistoru zenerovy diody.
Obr. 38: Blokové schéma vylepšeného zapojení RMS-DC pevodníku s obvodem AD734; (legenda: První blok – kompletní obvod AD734, DP – dolní propust, N – pomocné stejnosmrné zesilovae o stejném zesílení (N), NS – napový sledova, OFFSETS COMP. – obvody sloužící pro kompenzaci ofset vstup AD734)

46
Obr. 39: Zjednodušené schéma zapojení upraveného RMS-DC pevodníku s obvodem AD734 (úpravy zajišují optimalizaci napových úrovní ve zptné vazb (vstup dliky) a korekci napových ofset jednotlivých vstup obvodu)
3.5.2 Pepínání vstupní citlivosti upraveného zapojení RMS-DC pevodníku s AD734
Použití zesilova o zesílení N > 1 je výhodné pro signály s velkým initelem výkyvu. Problém však mže nastat v pípad, když pi mení dojde ke snížení initele výkyvu meného signálu. Napíklad v pípad úzkých obdélníkových puls o velikosti 10 V dojde k jejich rozšíení. Tím vzroste jejich efektivní hodnota limitn až na 10 V. Pokud je toto naptí N krát zesíleno ve zptné vazb, dlika se dostane mimo svj pracovní rozsah (maximální dovolené naptí na jejím vstupu je 10 V, viz. obr. 29). Maximální úrove vstupního naptí je tedy znan závislá na velikosti zesílení N pomocných zesilova a souasn také na initeli výkyvu vstupního signálu. Další úprava tedy spoívá k zaazení pepínatelného vysokofrekvenního zesilovae na vstupu upraveného pevodníku, jehož zesílení M se mní tak, aby pi zmn initele výkyvu meného signálu nedošlo k napovému petížení dliky. Pro správný pevod je pochopiteln nezbytné naptí na výstupu pevodníku odebírat pes dli s promnným dlicím pomrem rovným také M, viz. (obr. 39).
Je zejmé, že pro použití takového pevodníku není praktické konstanty M a N volit manuáln, jak tomu bylo pi mení na sestaveném vzorku. Pevodník by tedy bylo nezbytné

47
doplnit o pomocné obvody vyhodnocující napové pomry uvnit pevodníku, které by na základ jejich prbžného mení byly schopny zvolit optimální kombinaci konstant M a N. Bhem mení se dále ukázalo, že je velmi obtížné u vstupního zesilovae (širokopásmový stejnosmrn vázaný obrazový zesilova s obvodem AD811) dosáhnout dostaten vyrovnané kmitotové charakteristiky. Je teba, aby zvlnní amplitudov-kmitotové charakteristiky bylo menší než 0,1 dB. Toho lze dosáhnout použitím optimálních hodnot pracovních rezistor, které jsou výrobcem doporueny. Protože je zde nutné zesílení pepínat, nelze tuto podmínku dostaten splnit. Amplitudov - kmitotová charakteristika je také výrazn ovlivnna parazitními kapacitami a induknostmi pepínacích prvk. ešení jsou dv. Použitím sady tchto zesilova, kde by každý byl nastaven na konkrétní zesílení s použitím optimálních hodnot pracovních souástek. Výstupy by byly spojeny do jednoho
Obr. 40: Další úprava zapojení RMS-DC pevodníku s AD734 spoívající v doplnní zesilovae na vstupu s pepínatelným zesílením o velikosti M a dlie na výstupu s dlícím pomrem o velikosti rovné M, tedy o obvody vyrovnávající vstupní citlivost pevodníku pi zmn charakteru meného signálu
uzlu a aktivován by byl vždy jen jeden zesilova. Obvod AD811 takový režim umožuje. Je to však pomrn složité a drahé ešení. Druhá možnost je místo vf. zesilovae na vstup zaadit kmitotov kompenzovaný pepínatelný dli, který by byl na výstupu pevodníku naopak kompenzován pepínatelným zesilovaem, tentokrát však pesným, stejnosmrným. Pi použití takového ešení však lze oekávat zmenšení dynamického rozsahu vstupu, protože velikost vstupního signálu bude zmenšována a víc se tak uplatní stejnosmrné ofsety pevodníku.
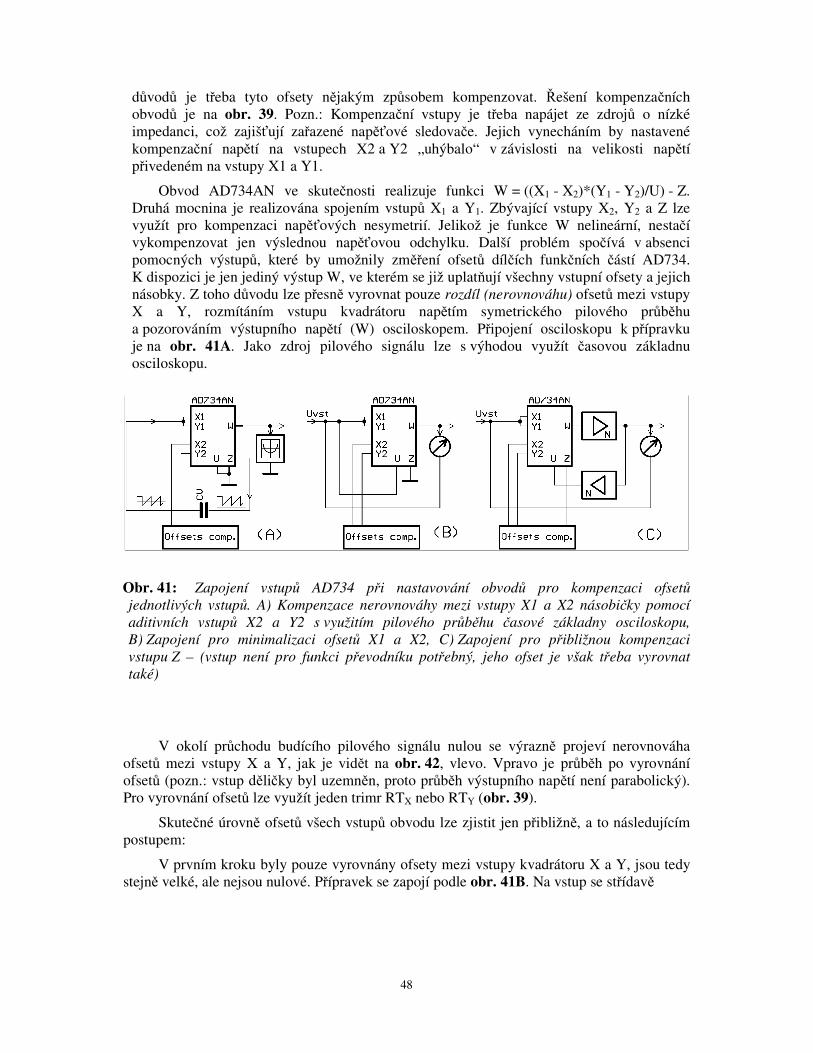
3.5.3 Korekce napových nesymetrií AD734AN v zapojení RMS-DC pevodníku
Obvod AD734AN má nkolik vstup, z nichž každý má svj napový ofset. Tyto ofsety se negativn uplatují zejména pi mení malých naptí, jak je vidt na obr. 29. Dále se nepíjemn uplatují pi použití pomocných zesilova, kdy se chyby zpsobené stejnosmrnými ofsety obvodu AD734AN díky pídavnému zesílení N krát násobí. Z tchto
48
dvod je teba tyto ofsety njakým zpsobem kompenzovat. ešení kompenzaních obvod je na obr. 39. Pozn.: Kompenzaní vstupy je teba napájet ze zdroj o nízké impedanci, což zajišují zaazené napové sledovae. Jejich vynecháním by nastavené kompenzaní naptí na vstupech X2 a Y2 „uhýbalo“ v závislosti na velikosti naptí pivedeném na vstupy X1 a Y1.
Obvod AD734AN ve skutenosti realizuje funkci W = ((X1 - X2)*(Y1 - Y2)/U) - Z. Druhá mocnina je realizována spojením vstup X1 a Y1. Zbývající vstupy X2, Y2 a Z lze využít pro kompenzaci napových nesymetrií. Jelikož je funkce W nelineární, nestaí vykompenzovat jen výslednou napovou odchylku. Další problém spoívá v absenci pomocných výstup, které by umožnily zmení ofset dílích funkních ástí AD734. K dispozici je jen jediný výstup W, ve kterém se již uplatují všechny vstupní ofsety a jejich násobky. Z toho dvodu lze pesn vyrovnat pouze rozdíl (nerovnováhu) ofset mezi vstupy X a Y, rozmítáním vstupu kvadrátoru naptím symetrického pilového prbhu a pozorováním výstupního naptí (W) osciloskopem. Pipojení osciloskopu k pípravku je na obr. 41A. Jako zdroj pilového signálu lze s výhodou využít asovou základnu osciloskopu.
Obr. 41: Zapojení vstup AD734 pi nastavování obvod pro kompenzaci ofset jednotlivých vstup. A) Kompenzace nerovnováhy mezi vstupy X1 a X2 násobiky pomocí aditivních vstup X2 a Y2 s využitím pilového prbhu asové základny osciloskopu, B) Zapojení pro minimalizaci ofset X1 a X2, C) Zapojení pro pibližnou kompenzaci vstupu Z – (vstup není pro funkci pevodníku potebný, jeho ofset je však teba vyrovnat také)
V okolí prchodu budícího pilového signálu nulou se výrazn projeví nerovnováha ofset mezi vstupy X a Y, jak je vidt na obr. 42, vlevo. Vpravo je prbh po vyrovnání ofset (pozn.: vstup dliky byl uzemnn, proto prbh výstupního naptí není parabolický). Pro vyrovnání ofset lze využít jeden trimr RTX nebo RTY (obr. 39).
Skutené úrovn ofset všech vstup obvodu lze zjistit jen pibližn, a to následujícím postupem:
V prvním kroku byly pouze vyrovnány ofsety mezi vstupy kvadrátoru X a Y, jsou tedy stejn velké, ale nejsou nulové. Pípravek se zapojí podle obr. 41B. Na vstup se stídav
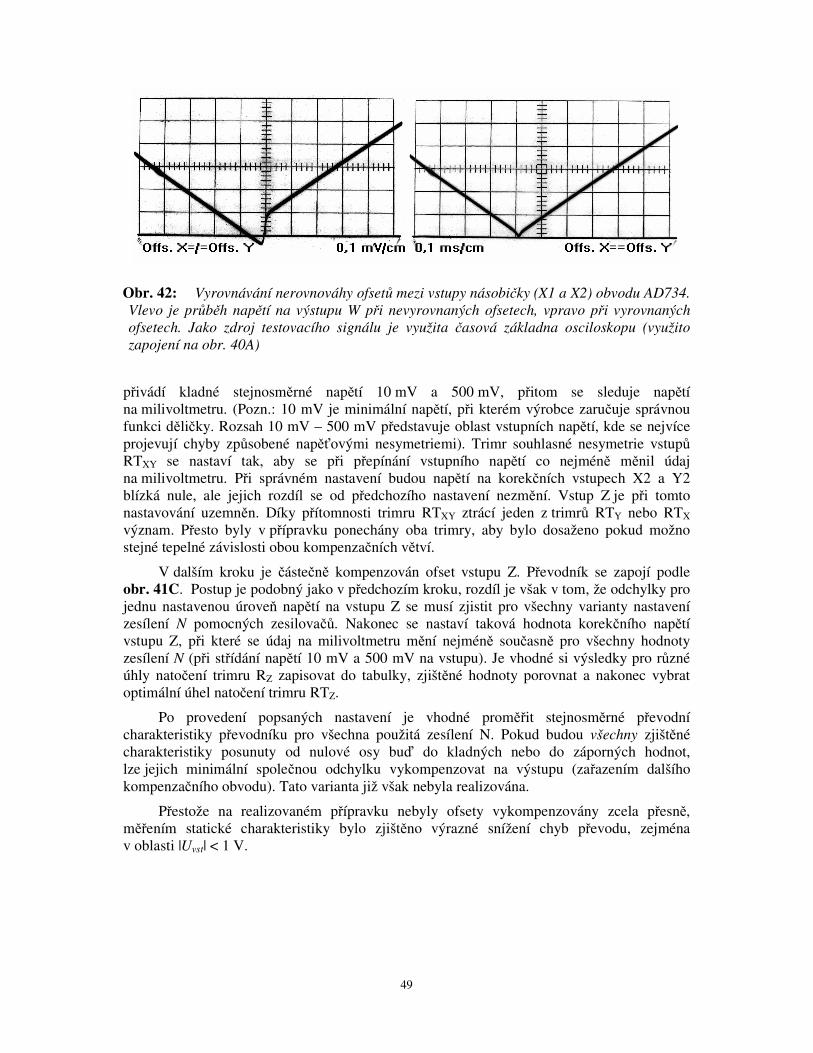
49
Obr. 42: Vyrovnávání nerovnováhy ofset mezi vstupy násobiky (X1 a X2) obvodu AD734. Vlevo je prbh naptí na výstupu W pi nevyrovnaných ofsetech, vpravo pi vyrovnaných ofsetech. Jako zdroj testovacího signálu je využita asová základna osciloskopu (využito zapojení na obr. 40A)
pivádí kladné stejnosmrné naptí 10 mV a 500 mV, pitom se sleduje naptí na milivoltmetru. (Pozn.: 10 mV je minimální naptí, pi kterém výrobce zaruuje správnou funkci dliky. Rozsah 10 mV – 500 mV pedstavuje oblast vstupních naptí, kde se nejvíce projevují chyby zpsobené napovými nesymetriemi). Trimr souhlasné nesymetrie vstup RTXY se nastaví tak, aby se pi pepínání vstupního naptí co nejmén mnil údaj na milivoltmetru. Pi správném nastavení budou naptí na korekních vstupech X2 a Y2 blízká nule, ale jejich rozdíl se od pedchozího nastavení nezmní. Vstup Z je pi tomto nastavování uzemnn. Díky pítomnosti trimru RTXY ztrácí jeden z trimr RTY nebo RTX význam. Pesto byly v pípravku ponechány oba trimry, aby bylo dosaženo pokud možno stejné tepelné závislosti obou kompenzaních vtví.
V dalším kroku je ásten kompenzován ofset vstupu Z. Pevodník se zapojí podle obr. 41C. Postup je podobný jako v pedchozím kroku, rozdíl je však v tom, že odchylky pro jednu nastavenou úrove naptí na vstupu Z se musí zjistit pro všechny varianty nastavení zesílení N pomocných zesilova. Nakonec se nastaví taková hodnota korekního naptí vstupu Z, pi které se údaj na milivoltmetru mní nejmén souasn pro všechny hodnoty zesílení N (pi stídání naptí 10 mV a 500 mV na vstupu). Je vhodné si výsledky pro rzné úhly natoení trimru RZ zapisovat do tabulky, zjištné hodnoty porovnat a nakonec vybrat optimální úhel natoení trimru RTZ.
Po provedení popsaných nastavení je vhodné promit stejnosmrné pevodní charakteristiky pevodníku pro všechna použitá zesílení N. Pokud budou všechny zjištné charakteristiky posunuty od nulové osy bu do kladných nebo do záporných hodnot, lze jejich minimální spolenou odchylku vykompenzovat na výstupu (zaazením dalšího kompenzaního obvodu). Tato varianta již však nebyla realizována.
Pestože na realizovaném pípravku nebyly ofsety vykompenzovány zcela pesn, mením statické charakteristiky bylo zjištno výrazné snížení chyb pevodu, zejména v oblasti |Uvst| < 1 V.

50
3.5.4 Mení na upraveném zapojení RMS-DC pevodníku s obvodem AD734
Podobn jako u základního zapojení AD734 (zapojení doporueného výrobcem) byla realizována pokusná deska s RMS-DC pevodníkem (s AD734) doplnným všemi popsanými podprnými obvody (pomocné zesilovae, obvody pro kompenzaci napových nesymetrií). Na takto realizovaném pevodníku byla provedena obdobná série mení, jejíž smyslem bylo ovit vliv provedených obvodových úprav na výsledné parametry.
• Stejnosmrné pevodní charakteristiky vylepšeného zapojení AD734 Mení byla provedena po vykompenzování ofset a pro všechna použitá zesílení N
pomocných zesilova. Na obr. 43 vlevo je stejnosmrná pevodní charakteristika upraveného pevodníku pi nastaveném zesílení pomocných zesilova N = 3, ped vykompenzováním ofset. Na obr. 43 vpravo je vidt, o kolik se sníží chyby pevodu po kompenzaci ofset popsané výše. Porovnáním charakteristik je vidt, že chyby pevodu jsou v tomto pípad minimáln poloviní. Podobné výsledky byly zjištny i pi ostatních zesíleních pomocných zesilova. Po kompenzaci ofset došlo ve všech pípadech ke snížení chyb pevodu. Pi porovnání obr. 29 a obr. 43 je také dobe vidt, o kolik kleslo maximální vstupní naptí Uvst, díky zaazení pomocného zesílení N = 3. Maximální možné konstantní vstupní naptí tedy pokleslo z pvodních 10 V pibližn na 3 - 3,5 V.
-2,0-1,8-1,6-1,4-1,2-1,0-0,8-0,6-0,4-0,20,00,2
0 0,5 1 1,5 2 2,5 3 3,5 4 4,5
Uvst [V]
Chy
ba pe
vodu
[%]
-0,20,00,20,40,60,81,01,21,41,61,82,0
0 0,5 1 1,5 2 2,5 3 3,5 4Uvst [V]
Chy
ba pe
vodu
[%]
Obr. 43: Procentní odchylka výstupního naptí od vstupního stejnosmrného naptí, vlevo je charakteristika pevodníku ped kompenzací ofset, vpravo po kompenzaci ofset. V obou pípadech je zvoleno zesílení pomocných zesilova o velikosti N = 3 (pozn.: je-li na vstup pevodníku pivedeno kladné konstantní stejnosmrné naptí, mlo by výstupní naptí mít stejnou hodnotu)

51
• Závislost pesnosti pevodu na initeli výkyvu testovacího signálu pro rzné velikosti zesílení N pomocných zesilova ve vylepšeném zapojení RMS-DC pevodníku s obvodem AD734 Toto mení bylo provedeno za úelem ovení zlepšení schopnosti pevodníku
zpracovávat signály s velkým initelem výkyvu (CF) pi zvyšujícím se zesílení N pomocných zesilova. Výsledky mení jsou na obr. 44. Mení bylo provedeno pro obdélníkový pulsní signál upnutý k nulovému potenciálu s mezivrcholovou hodnotou 4 VPP, o kmitotu f = 10 kHz. Zjištné limity potvrdily teoretické pedpoklady:
Pro zesílení N = 1 je limitní initel výkyvu CF ≈ 1,35 (stída S = 0,55), pro N = 2 je maximální CF ≈ 2,29 (S = 0,19), pro N = 3 je maximální CF ≈ 3,16 (S = 0,1), pro N = 5 je maximální CF ≈ 5,7 (S = 0,03).
Porovnáním zjištných výsledk (porovnáním obr. 32 a obr. 44) je zejmé, že popsanými obvodovými úpravami (optimalizace pracovního rozsahu dliky) došlo k výraznému zlepšení schopnosti pevodníku s obvodem AD734 zpracovávat signály s velkým initelem výkyvu (tedy napíklad pulsní signály s malou stídou nebo šumové signály).
-4
-3
-2
-1
0
1
2
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8
Stída [-]
Chy
ba pe
vodu
[%]
N=1N=2N=3N=5
Obr. 44: Pesnost pevodu vylepšeného zapojení RMS-DC pevodníku s obvodem AD734, v závislosti na stíd testovacího pulsního signálu a velikosti N zesílení pomocných zesilova; porovnáním s obr. 32 lze pozorovat výrazné zlepšení schopnosti pevodníku zpracovávat signály s malou stídou (velkým initelem výkyvu)

52
• Závislost chyby pevodu upraveného zapojení RMS-DC pevodníku s obvodem AD734 na kmitotu meného signálu Všechny úpravy na zapojení pevodníku se týkaly stejnosmrné ásti (krom
pomocného vstupního zesilovae M, který byl nakonec pro všechna mení odpojen), lze tedy pedpokládat, že se kmitotové vlastnosti pevodníku úpravami základního zapojení nezmnily. Je teba mít na vdomí, že pi mení pulsních signál je teba dodržet minimální šíku puls 0,1 µs. To je dáno dobou reakce kvadrádoru. Periodickému signálu o šíce pulsu 0,1 µs pi stíd S = 0,5 odpovídá kmitoet fmax = 5 MHz. Ale pi stíd S = 0,1 už jen fmax = 1 MHz. Je tedy zejmé, že s rostoucím initelem výkyvu meného signálu klesá maximální mitelný kmitoet signálu.
• Pesnost pevodu šumového signálu upraveným pevodníkem s AD734 Zde byly výsledky mení porovnávány s údaji True RMS pevodníku integrovaném
v digitálním osciloskopu. Mení tak lze považovat pouze za orientaní. Grafy závislostí chyb pevodu na nastavených parametrech pevodníku a šumového signálu jsou na obr. 45. Chyby pevodu se pohybují kolem 10 %, ovšem za pedpokladu, že je nastaveno zesílení pomocných zesilova N = 2 a více.
Z výsledk mení dále vyplývá, že pro chyby mení menší než 10 % je nutné, aby prmrná mezivrcholová hodnota šumového signálu byla Ušpp > 2 V (pro N = 2) a Ušpp > 1 V (pro N > 2).
-40
-30
-20
-10
0
10
20
30
40
0 1 2 3 4 5 6 7 8
Ušpp [V]
Chy
ba pe
vodu
[%]
N=1N=2N=3N=5N=10
Obr. 45: Pesnost vylepšeného pevodníku s AD734 pi pevodu bílého šumu v závislosti na velikosti jeho mezivrcholové hodnoty; charakteristiky byly meny pro velikosti zesílení pomocných zesilova (N) uvedené v grafu
53
• Schéma zapojení a provedení pokusného vzorku vylepšeného zapojení RMS-DC pevodníku s obvodem AD734 Na obr. 46 je schéma pípravku True RMS pevodníku v upraveném zapojení. Toto
schéma obsahuje zatím nezmínný obvod indikace petížení dliky (IO70A). Na vstupu je pomocný širokopásmový zesilova o nastavitelném zesílení o velikosti M. Na výstupu pevodníku je pepínatelný dli s dlícím pomrem také o velikosti M, (pi mení parametr pevodníku byly oba tyto bloky vyazeny z innosti).
Operaní zesilovae IO1A, IO1B, IO3A a IO3B jsou precizní zesilovae AD708JN s velmi malými vstupními napovými ofsety. Zesilovae zajišující malou vnitní impedanci výstup obvod sloužících ke korekci ofset AD734AN, mžou být obyejné typy, zde byly použity obvody LM358. V obvodu sloužícím k indikaci petížení dliky (IO70A) je použit integrovaný komparátor LM239N.
Vstup pevodníku je piveden na BNC konektor a je opaten pizpsobovacími rezistory 50 Ω nebo 75 Ω, dle poteb.
Pro zvýšení spolehlivosti nebyla jednotlivá zesílení pomocných zesilova nastavována odporovými trimry, ale bankami rezistor v jednotlivých pepínatelných vtvích. Souet hodnot všech tí rezistor v každé vtvi dává pesnou požadovanou hodnotu. Jako pepínae byly použity bžné zkratovací propojky (Jumper).
Protože se upravené zapojení pevodníku ukázalo sice dobe funkní, ale píliš složité a nepedpokládá se tak jeho další realizace, nejsou zde uvedena soupiska souástek ani hodnoty souástek ve schématu.
Závr: mením parametr pípravku mie ve vylepšeném zapojení RMS-DC pevodníku s obvodem AD734 bylo zjištno, že použití pomocných zesilova skuten vede k výraznému zlepšení funkce pi pevodech signál s velkým initelem výkyvu.
Nevýhodou upraveného pevodníku je možnost napového petížení dliky pi poklesu initele výkyvu meného signálu, nedojde-li souasn ke snížení amplitudy meného signálu. Je tedy nutné sledovat úrove na jejím vstupu a pípadn ji snížit zmenšením N.
Nutnost kompenzace ofset se projevila zejména pi vtších hodnotách N, kdy se vliv ofset zesílením násobí. Nevykompenzované ofsety prakticky znemožují použití zesílení N > 3. Kompenzaní obvody však vedou ke zvýšení složitosti celého pevodníku a jejich nastavování je pomrn komplikované. Výhodnjší by možná bylo použít obvod AD734BN, u njž výrobce zaruuje poloviní až tetinové ofsety a vyhnout se tak nutnosti kompenzace.
Uvedené zapojení vykazuje dobré parametry pro použití pevodníku k mení efektivní hodnoty šumu v aplikaci mie odstupu signálu od šumu pro videosignály. Vylepšený pevodník je však obvodov pomrn složitý a navíc nastavení obvod pro kompenzaci ofset je velmi zdlouhavé a komplikované. Z tchto dvod bylo od použití obvodu AD734 v aplikaci efektivního pevodníku zcela upuštno.

54
Obr. 46: Úplné schéma vylepšeného zapojení RMS-DC pevodníku s obvodem AD734
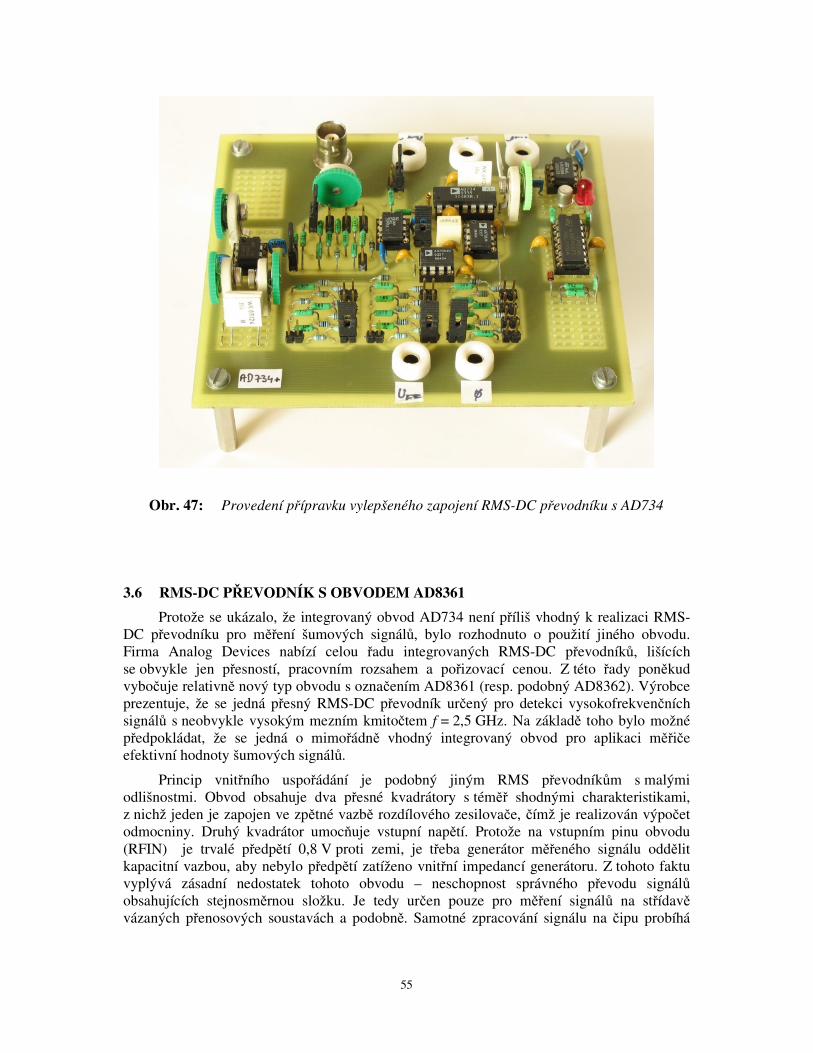
55
Obr. 47: Provedení pípravku vylepšeného zapojení RMS-DC pevodníku s AD734
3.6 RMS-DC PEVODNÍK S OBVODEM AD8361 Protože se ukázalo, že integrovaný obvod AD734 není píliš vhodný k realizaci RMS-
DC pevodníku pro mení šumových signál, bylo rozhodnuto o použití jiného obvodu. Firma Analog Devices nabízí celou adu integrovaných RMS-DC pevodník, lišících se obvykle jen pesností, pracovním rozsahem a poizovací cenou. Z této ady ponkud vybouje relativn nový typ obvodu s oznaením AD8361 (resp. podobný AD8362). Výrobce prezentuje, že se jedná pesný RMS-DC pevodník urený pro detekci vysokofrekvenních signál s neobvykle vysokým mezním kmitotem f = 2,5 GHz. Na základ toho bylo možné pedpokládat, že se jedná o mimoádn vhodný integrovaný obvod pro aplikaci mie efektivní hodnoty šumových signál.
Princip vnitního uspoádání je podobný jiným RMS pevodníkm s malými odlišnostmi. Obvod obsahuje dva pesné kvadrátory s tém shodnými charakteristikami, z nichž jeden je zapojen ve zptné vazb rozdílového zesilovae, ímž je realizován výpoet odmocniny. Druhý kvadrátor umocuje vstupní naptí. Protože na vstupním pinu obvodu (RFIN) je trvalé pedptí 0,8 V proti zemi, je teba generátor meného signálu oddlit kapacitní vazbou, aby nebylo pedptí zatíženo vnitní impedancí generátoru. Z tohoto faktu vyplývá zásadní nedostatek tohoto obvodu – neschopnost správného pevodu signál obsahujících stejnosmrnou složku. Je tedy uren pouze pro mení signál na stídav vázaných penosových soustavách a podobn. Samotné zpracování signálu na ipu probíhá

56
v proudovém módu. Vstupní vazební kondenzátor i filtraní kondenzátor jsou vyvedeny mimo ip a lze tak zvolit vhodné hodnoty kapacit pro zamýšlené pásmo kmitot mených signál. Výrobce zaruuje, že pi dostaten velké kapacit vazebního a filtraního kondenzátoru lze zpracovávat signály o libovoln nízkých kmitotech. Konverzní zisk celého pevodníku je 7,5. Platí tedy:
UOUT = 7,5 . UIN_rms . [V] (31)
Obvod mže pracovat celkem ve tech odlišných režimech:
a) Režim vnitní reference
b) Režim reference napájecího naptí
c) Režim referenní zem
ad b) Pin IREF je nepipojen a pin SREF je teba pipojit na zem. Není-li na vstup piveden žádný signál, je na výstupu pevodníku trvale stejnosmrné naptí o velikosti UCC / 7,5. Je-li na vstupu piveden signál, má být na výstupu naptí UOUT = 7,5UIN_rms + UCC / 7,5 V.
ad b) Pin IREF a pin SREF je teba pipojit na VPOS. Není-li na vstup piveden žádný signál, je na výstupu pevodníku trvale stejnosmrné naptí 0,350 V. Je-li na vstupu piveden signál, má být na výstupu naptí UOUT = 7,5UIN_rms + 0,350 V.
ad c) Pin IREF je teba pipojit na VPOS a pin SREF na zem. Pokud není na vstup piveden žádný signál, je výstupní naptí pevodníku nulové. Je-li na vstup piveden signál, má být na výstupu naptí UOUT = 7,5UIN_rms.
Obr. 48: Schéma zapojení RMS-DC pevodníku s obvodem AD8361, micí vzorek

57
Podle doporueného schéma zapojení (obr. 48) byl postaven pokusný modul pro ovení skutených vlastností pevodníku. Na modulu byla provedena obdobná série mení jako v pípad pevodník s obvodem AD734. Stejnosmrná charakteristika mena nebyla, protože obvod AD8361 neumožuje detekci stejnosmrných signál. Byly tak zmeny alespo klidové napové úrovn na výstupu pi všech tech referenních módech. Zmené hodnoty odpovídají výše popsaným hodnotám.
• Mení schopnosti pevodníku AD8361 zpracovávat stídav vázané pulsní signály s rznou stídou a amplitudou
Na vstup pevodníku byl piveden pulsní signál z generátoru pes kapacitní vazbu. Souasn byl na vstupu pevodníku osciloskopickou sondou snímán prbh signálu a na osciloskopu byla posléze odetena mezivrcholová hodnota signálu a stída. Dále bylo kontrolováno, jestli není signál na vstupu pevodníku zkreslen díky píliš malé vazební kapacit (pokud byl signál zkreslen, byla kapacita adekvátn zvtšena). Následn bylo teba využít speciální vztah (25) pro výpoet efektivní hodnoty stídav vázaného obdélníkového signálu. Proporce vstupního signálu zjištné pomocí osciloskopu byly zadány jako vstupní hodnoty do (25) a tím vypoítána efektivní hodnota stídav vázaného testovacího signálu. Vypoítané hodnoty byly porovnávány s výstupním naptím na pevodníku a po pepotu (dlení konstantou 7,5) urovány chyby pevodu. Mení bylo provedena v režimu referenní zem a následn byla provedena obdobná mení v ostatních režimech (se stejnými výsledky).
-60-50-40-30-20-10
0102030405060
0,0 0,2 0,4 0,6 0,8 1,0 1,2
Efektivní hodnota stídav vázaného pulsního signálu [V]
Chy
ba pe
vodu
[%]
Ideal
S = 0,05
S = 0,2
S = 0,5
S = 0,8
S = 0,95
Obr. 49: Pesnost pevodu RMS-DC pevodníku s obvodem AD8361 v závislosti na velikosti efektivní hodnoty vstupního testovacího obdélníkového signálu pivedeného stídavou vazbou, pi nkolika rzných stídách S
Na obr. 49 jsou zachyceny závislosti chyby pevodu efektivní hodnoty stídav vázaného testovacího obdélníkového signálu. Pi mení jednoho prbhu byla mnna

58
efektivní hodnota zmnou amplitudy signálu pi nemnné stíd. Protože výsledky mení ukazují, že pevod je znan nepesný, piemž pesnost pevodu je závislá na stíd obdélníkového signálu, bylo provedeno druhé mení urené k definování závislosti nepesnosti pevodu na initeli výkyvu stídav vázaného testovacího signálu.
-25
-20
-15
-10
-5
0
5
10
15
20
1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0 5,5
initel výkyvu stídav vázaného obdélníkového signálu CF [-]
Chy
ba pe
vodu
[%]
Uvst = 0,5 Vpp
Obr. 50: Závislost chyby pevodu RMS-DC pevodníku s AD8361 stídav vázaného obdélníkového testovacího signálu na initeli výkyvu testovacího signálu; testovací signál ml stálou mezivrcholovou hodnotu 0,5 VPP
Na obr. 50 je patrná výrazná závislost pesnosti pevodu na initeli výkyvu meného signálu. I v tomto pípad bylo výstupní naptí porovnáváno s vypoítanou efektivní hodnotou stídav vázaného signálu na vstupu integrovaného obvodu (zjištné chyby tedy nezahrnují chybu zpsobenou oddlením stejnosmrné složky signálu). Z výsledk je patrné, že chyby pevodu jsou snesiteln malé pouze v pípad, že je men stídav vázaný signál s initelem výkyvu pibližn rovným CF ≈ 1,3. To je pomrn zajímavé zjištní, protože se nabízí vysvtlení, že obvod je uren pouze pro pevod harmonických signál, které se vyznaují initelem výkyvu CF = 1,414. Takové tvrzení je však v pímém rozporu s tvrzením výrobce obvodu AD8361, že je pevodník uren pro zpracování signál libovolného prbhu bez stejnosmrné složky. Ostatn vnitní uspoádání pevodníku dává tomuto tvrzení za pravdu. Mení však byla provedena opakovan (dokonce na dvou integrovaných obvodech) a vždy s obdobn špatnými výsledky.
• Mení pesnosti RMS-DC pevodníku AD8361 mením harmonického prbhu Pro potvrzení závru, že zkoumaný vzorek s obvodem AD8361 pevádí správn pouze
signály s initelem výkyvu odpovídajícím harmonickému signálu, byla promena

59
charakteristika pesnosti pevodu sinusového prbhu o kmitotu f = 40 MHz v závislosti na amplitud signálu. Na obr. 51 jsou výsledky tohoto mení, které zmínný závr potvrzují. Harmonický prbh byl obvodem AD8361 pevádn s relativn malou chybou.
0
0,1
0,2
0,3
0,4
0,5
0,6
0 0,2 0,4 0,6 0,8 1 1,2 1,4
Rozkmit vstupního naptí Upp [V]
Efe
ktiv
ní h
od
no
ta U
ef [
V]
-60
-40
-20
0
20
40
60
Ch
yba
pe
vod
u [
%]
Teoretický prbh Uef
Zmený prbh Uef
Odchylka zmeného prbhu
Obr. 51: Závislost pesnosti pevodu RMS-DC pevodníku s obvodem AD8361 pi mení harmonického prbhu v závislosti na amplitud (perušovaný prbh zobrazuje závislost chyby pevodu v procentech na mezivrcholové hodnot vstupního naptí, platí pro nj pravá svislá osa)
Obr. 52: Osazovací plán a vodivý motiv desky plošných spoj pípravku RMS-DC pevodníku s obvodem AD8361 (pouzdro MSOP). Šíka destiky je l = 50 mm, vodivý motiv je na stran souástek a to ve skuteném pohledu

60
Obr. 53: Provedení pípravku RMS-DC pevodníku s obvodem AD8361
Závr: Série mení provedená na pípravku RMS-DC pevodníku s integrovaným obvodem AD8361 ani v nejmenším nepotvrdila vynikající vlastnosti prezentované výrobcem. Narozdíl od výrobcem doporueného zapojení RMS-DC pevodníku s obvodem AD734, u kterého se podailo píinu nepesného pevodu signál s velkým initelem výkyvu odhalit a sérií opatení tuto píinu potlait (napový rozsah dliky), u obvodu AD8361 se žádné rozumné vysvtlení chybné funkce nalézt nepodailo a výsledky mení nedávají dvod k jakémukoliv použití tohoto obvodu.
3.7 RMS-DC PEVODNÍK S OBVODEM AD637
Protože se integrované obvody AD734 a AD8361 pro aplikaci RMS-DC pevodníku ureného pro šumové signály píliš neosvdily (AD734 s konstrukních a ekonomických dvod, AD8361 z funkních dvod), byla pozornost zamena na další integrovaný obvod firmy Analog Devices – RMS pevodník AD637. Jedná se o obvod z „klasické“ ady RMS-DC pevodník urených pro detekci nízkofrekvenních a stedofrekvenních signál (do 10 MHz) firmy Analog Devices, a mlo by se jednat o jeden z nejlepších obvod této ady.
Na obr. 54 je naznaené blokové schéma struktury AD637 s pipojenými vnjšími souástkami. Je zejmé, že se jedná o standardní zapojení implicitního (zptnovazebního) RMS-DC pevodníku realizujícího matematickou funkci (9). První dva bloky (ABS a QUAD) provádí výpoet druhé mocniny okamžité hodnoty naptí vstupního signálu. Následuje dlika, ve které je umocnná hodnota dlena integrovaným výstupním naptím (odpovídá
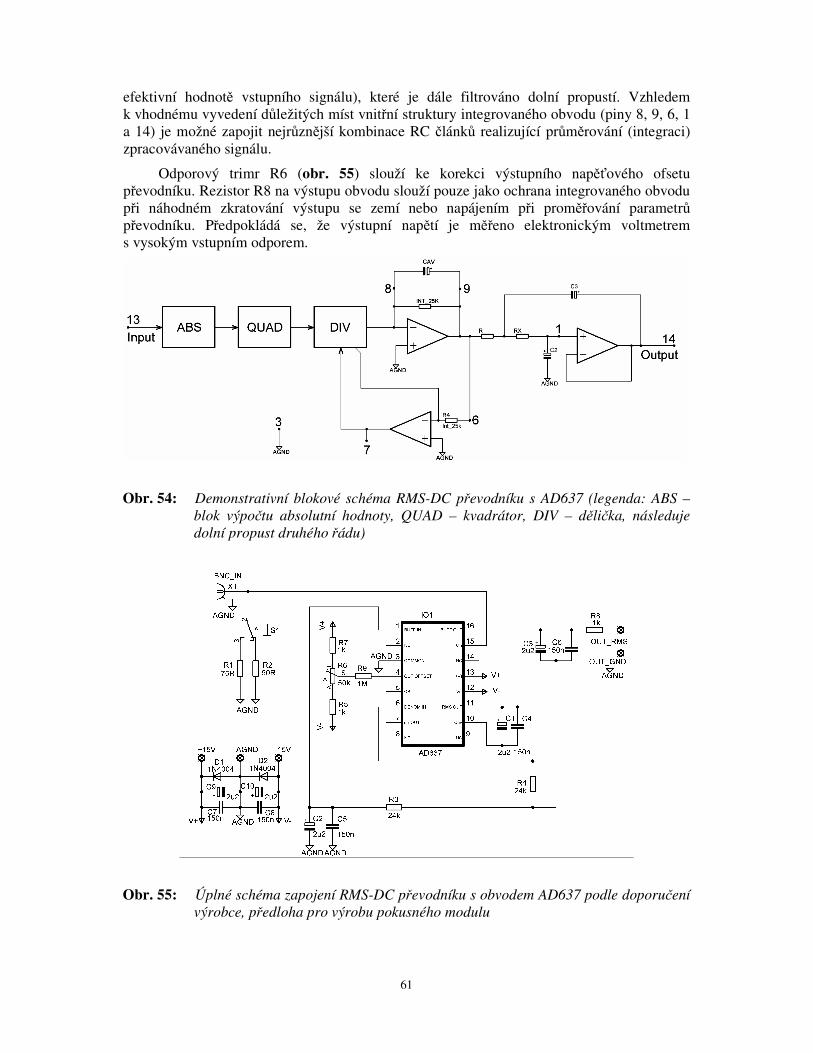
61
efektivní hodnot vstupního signálu), které je dále filtrováno dolní propustí. Vzhledem k vhodnému vyvedení dležitých míst vnitní struktury integrovaného obvodu (piny 8, 9, 6, 1 a 14) je možné zapojit nejrznjší kombinace RC lánk realizující prmrování (integraci) zpracovávaného signálu.
Odporový trimr R6 (obr. 55) slouží ke korekci výstupního napového ofsetu pevodníku. Rezistor R8 na výstupu obvodu slouží pouze jako ochrana integrovaného obvodu pi náhodném zkratování výstupu se zemí nebo napájením pi promování parametr pevodníku. Pedpokládá se, že výstupní naptí je meno elektronickým voltmetrem s vysokým vstupním odporem.
Obr. 54: Demonstrativní blokové schéma RMS-DC pevodníku s AD637 (legenda: ABS –
blok výpotu absolutní hodnoty, QUAD – kvadrátor, DIV – dlika, následuje dolní propust druhého ádu)
Obr. 55: Úplné schéma zapojení RMS-DC pevodníku s obvodem AD637 podle doporuení výrobce, pedloha pro výrobu pokusného modulu

62
3.7.1 Analýza vlastností RMS-DC pevodníku s obvodem AD637
Podobn jako u ostatních zkoumaných obvod byl i v tomto pípad sestaven pokusný modul, na kterém byla provedena série mení nejdležitjších vlastností pevodníku. Výsledky mení jsou shrnuty do následujících bod:
• Stejnosmrná pevodní charakteristika AD637: Na vstup modulu bylo pivedeno stejnosmrné konstantní naptí. Protože efektivní
hodnota stejnosmrného naptí je rovna jeho velikosti (initel výkyvu konstantního naptí CF = 1), mlo by být totéž naptí také na výstupu pevodníku.
-5,0-4,5-4,0-3,5-3,0-2,5-2,0-1,5-1,0-0,50,0
0,01 0,1 1 10 100
Vstupní stejnosmrné naptí Uvst [V]
Chy
ba pe
vodu
[%
]
Obr. 56: Procentní odchylka výstupního naptí od vstupního stejnosmrného naptí RMS-DC pevodníku s obvodem AD637 (je-li na vstup pevodníku pivedeno kladné konstantní stejnosmrné naptí, mlo by výstupní naptí mít stejnou hodnotu)
Z obr. 56 lze vyíst, že stejnosmrná pevodní charakteristika vykazuje malou chybu (do 5 %) v pomrn širokém rozsahu vstupních naptí UVST ∈ (20 mV – 14 V), tj. 57 dB. V porovnání se stejnosmrnými charakteristikami u ostatních mených modul (viz. obr. 29 a obr. 43) se jedná o nejlepší výsledek.
• Závislost chyby pevodu AD637 na kmitotu meného signálu
Jedná se o mení odchylky výstupního naptí od požadované hodnoty v závislosti na kmitotu a amplitud micího signálu. Jako micí signál byl použit symetrický (+ Up = -Up) harmonický signál a symetrický obdélníkový signál, tedy o signály s malým a konstantním

63
-20-10
0102030405060708090
0,001 0,01 0,1 1 10 100
Kmitoet f [MHz]
Chy
ba pe
vodu
[%]
Upp = 10 VUpp = 4 VUpp = 0,4 VUpp = 0,05 V
Obr. 57: Závislost relativní chyby pevodu RMS-DC pevodníku s AD637 v základním zapojení na kmitotu a amplitud testovacího symetrického obdélníkového signálu o stíd S = 0,5 pro rzné amplitudy signálu
-20
-10
0
10
20
30
40
50
60
70
80
90
0,001 0,01 0,1 1 10 100
Kmitoet f [MHz]
Chy
ba pe
vodu
[%]
Upp = 10 VUpp = 4 VUpp = 0,4 VUpp = 0,05 V
Obr. 58: Závislost relativní chyby pevodu RMS-DC pevodníku s AD637 v základním zapojení na kmitotu a amplitud testovacího symetrického harmonického signálu

64
initelem výkyvu. Zmené charakteristiky jsou na obr. 57 a obr. 58. Jako referenní micí pístroj byl použit digitální osciloskop uvádjící efektivní hodnotu testovacího signálu.
Z charakteristik je patrné, že pevodník dává nejpesnjší výsledky v oblasti kmitot menších jak 1 MHz, je-li amplituda testovacího signálu alespo 1 V. V pásmu kmitot 1 MHz – 10 MHz narstá chyba pevodu, je-li amplituda signálu vtší jak 2 V. V této kmitotové oblasti je tedy nutné pro pesné mení dodržet optimální amplitudu meného signálu, která je pibližn rovna UOPT = 2 V. To je dležité zjištní, chceme-li pevodník použít v mii odstupu signálu od šumu. Pokud by nebyla dodržena optimální amplituda meného šumového naptí, mohlo by dojít ke zdraznní vyšších kmitotových složek šumového signálu a v krajním pípad až k úplnému vykompenzování penosové funkce videometrického filtru, který v popisovaném mii odstupu signálu od šumu vyšší kmitotové složky naopak potlauje.
• Pesnost pevodu šumového signálu pevodníkem AD637
Zdrojem meného šumového signálu byl bžný funkní generátor Agilent. Namené hodnoty byl porovnávány s údaji True RMS pevodníku integrovaném v digitálním osciloskopu. Mení tak lze považovat pouze za orientaní. Grafy závislostí chyb pevodu na jsou na obr. 59. Zjištné výsledky potvrzují závr pedchozího mení, tedy že optimální amplituda meného signálu o vyšších kmitotech je UOPT = 2 V (tomu odpovídá mezivrcholová hodnota šumového signálu pibližn UNpp = 4,5V). Není-li však požadována pesnost pevodu lepší než 5 %, je možno se od optimální amplitudy signálu výrazn odchýlit.
-20
-15
-10
-5
0
5
10
15
20
2 2,5 3 3,5 4 4,5 5 5,5 6 6,5 7 7,5 8 8,5Rozkmit šumu [Vpp]
Chy
ba pe
vodu
[%
]
Obr. 59: Pesnost vylepšeného pevodníku s AD637 pi pevodu bílého šumu v závislosti
na velikosti jeho mezivrcholové hodnoty

65
• Pesnost pevodu RMS-DC pevodníku s AD637 v závislosti na initeli výkyvu meného testovacího signálu Schopnost správného pevodu signál s velkým initelem výkyvu CF je základním
kvalitativním ukazatelem RMS-DC pevodník. Problematika již byla podrobn rozebrána v teoretické ásti práce. V tomto pípad (podobn jako v pedchozích) bylo mení provedeno pomocí testovacího obdélníkového signálu upnutého k nulovému potenciálu s konstantním kmitotem ale promnnou stídou. Platí zde, že initel výkyvu se rovná pevratné hodnot z odmocniny stídy obdélníkového signálu. Tedy ím menší stída, tím vtší initel výkyvu. Ze zmených hodnot vynesených v grafech na obr. 60 vyplývá, že pevodník je navržen zejména pro zpracovávání signál s vtším initelem výkyvu (mezi které patí i šumové signály). Jako referenní hodnoty pi urování odchylky výstupního naptí pevodníku byly použity vypotené efektivní hodnoty pomocí vztahu (15) ze zmených proporcí vstupního testovacího signálu na osciloskopu. Mení tak je tak nutno považovat za mén pesné.
-16
-14
-12
-10
-8
-6
-4
-2
0
20 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Stída [-]
Chy
ba pe
vodu
[%]
f = 1 kHzf = 100 kHzf = 1 MHz
Obr. 60: Závislost pesnosti pevodu RMS-DC pevodníku s obvodem AD637 na zmn stídy (a tedy i initele výkyvu) testovacího obdélníkového signálu upnutého k nulovému potenciálu
Na obr. 61 – 63 jsou podklady pro výrobu testovacího modulu, na kterém byla provedena sestava mení. Ve filtraních obvodech byly použity miniaturní tantalové kondenzátory pemostné keramickými kondenzátory. Na modulu je možno pepínat mezi vstupní impedancí 50 Ω, 75 Ω a 50 kΩ.

66
Obr. 61: Provedení testovacího modulu RMS-DC pevodníku s obvodem AD637. Integrovaný obvod je osazen ze spodní strany (BOTTOM), ostatní souásty vetn dvou drátových propojek jsou osazeny z horní strany (TOP)
Obr. 62: Osazovací plán modulu RMS-DC pevodníku AD637, horní strana (TOP)

67
Obr. 63: Vodivý motiv desky plošných spoj pevodníku s AD637, spodní strana (BOTTOM), nápis musí být itelný, pin . 1 integrovaného obvodu musí být vlevo dole z tohoto pohledu
Závr: Pevodník RMS-DC s integrovaným obvodem AD637 spluje nejlépe pedpoklady pro použití v mii odstupu signálu od šumu pro videosignálu v aplikaci detektoru efektivní hodnoty šumu. Pevodník má srovnatelné nebo mírn lepší parametry v porovnání s vylepšeným zapojením RMS-DC pevodníku s obvodem AD734. Protože je pevodník s obvodem AD637 navíc konstrukn a realizan nesrovnateln jednodušší, není o jeho použití v mii odstupu signálu od šumu žádných pochyb.
3.8 POUŽITÉ MICÍ PÍSTROJE
• Funkní generátor Agilent 33 120A
• Pulsní generátor Datapulse 110B
• Digitální osciloskop Agilent 54 621A
• Analogový osciloskop Tesla BM 464
• Osciloskopická sonda Tektronix P6062 A
• Digitální multimetr Fluke 87
• Stabilizovaný napájecí zdroj Aritma TSZ 75

68
4 ZÁVR
Navržený mi odstupu signálu od šumu pro videosignály je uren pro mení vlastností zaízení urených pro penos a zpracování videosignál. Pístroj vyžaduje pro správnou funkci použití speciálního testovacího kompozitního videosignálu, nelze tedy pomocí nj mit odstup signálu od šumu libovolného signálu, napíklad demodulovaného televizního vysílání.
Výsledkem práce je návrh analogové a analogov digitální ásti mie vetn návrhu konstrukního ešení. Deska plošných spoj mie má rozmry 120 x 75 mm, vodivé spoje i souástky jsou po obou stranách. Souástí je BNC konektor pro pivedení meného signálu, konektor pro pipojení napájecího naptí +/- 15 V a dvacetipinový konektor pro pipojení modulu digitální ásti a zobrazovací jednotky. Konektor pipojuje datovou sbrnici pro penos digitalizovaných dat do mikroprocesoru, dále ídící sbrnici obsahující potebné ovládací a komunikaní spoje mezi modulem analogové a digitální ástí pístroje a napájení pro digitální ást. Digitální ást mie nebyla souástí návrhu mie. Pi návrhu programu pro mikroprocesor bude teba vzít v úvahu princip funkce analogové ásti pístroje, zahrnout do výpoetních algoritm korekci vlastních šumových ísel a nelinearit komponent anologové ásti mie, vyešit komunikaní protokol procesoru s analogov-digitálními pevodníky, zobrazovací jednotkou a ovládací jednotku. Dále je teba vhodn vyešit napájecí ást pístroje, zejména bude-li požadováno napájení z baterií.
Velká pozornost pi návrhu analogové ásti mie byla vnována optimálnímu urení lomových kmitot pasivních Cauer-ebyševových propustí pátého ádu, urených pro separaci šumového a užiteného kmitotového pásma meného videosignálu tak, aby byla dosažena pokud možno co nejvtší pesnost mení. Navržené propusti byly detailn analyzovány simulacemi v programu PSpice.
Další podrobn zkoumanou ástí mie odstupu signálu od šumu byl pevodník oddleného šumového signálu na efektivní hodnotu (RMS-DC konvertor). Pro analýzu vlastností byly použity celkem ti integrované analogové RMS-DC pevodníky firmy Analog Devices, a to AD734, AD8361 a AD637. Sestavení celkem ty experimentálních modul s tmito obvody a detailní promení jejich vlastností vedlo k tomuto závru:
• Obvod AD734 v základním zapojení (doporueném výrobcem) aplikaci RMS-DC pevodníku nevyhovuje
• Obvod AD734 ve vylepšeném zapojení také nevyhovuje (zapojení funguje dobe, je ale pomrn složité a vyžaduje zdlouhavé nastavování korekcí napových nesymetrií)
• Obvod AD8361 z nezjištných dvod pro znané chyby pevodu zcela nevyhovuje
• Obvod AD637 pln vyhovuje aplikaci mie efektivní hodnoty šumu. K obvodu postauje pipojení jen nkolika externích souástek a jeho pesnost je dobrá (parametry jsou srovnatelné nebo lepší v porovnání s vylepšeným zapojením obvodu AD734)
Ostatní ásti analogové ásti byly navrženy bez podrobnjší analýzy a pedpokládá se, že budou ped finálním postavením kompletního modulu mie sestaveny napíklad na nepájivém kontaktním poli a následn bude ovena jejich funknost. Jelikož se jedná o pomrn jednoduchá, vesms pevzatá a jen mírn upravená zapojení, lze oekávat zmny spíše jen v hodnotách použitých souástek.

69
LITERATURA [1] íný, V.: Televizní distribuní sít a systémy. Skriptum VUT Brno, FEKT UREL 2005
[2] íný, V.: Videotechnika. Skriptum VUT Brno, FEKT UREL 2003
[3] Hajoš, Z.: Filtre v televíznej technike. Alfa Bratislava, 1988
[4] Dostál, T., Axman, V.: Elektrické filtry. Elektronické skriptum, VUT Brno, FEKT UREL
[5] Punochá, J., Operaní zesilovae v elektronice, BEN Praha, 1997
[6] Katalogové listy Analog Devices. http://www.analog.com/
[7] Gesheitová, E., Rez, J., Steinbauer, M.: Mení v Elektrotechnice. Brno, Vutium 2002.
[8] Gescheitová, E. a kol.: Základní metody mení v elektrotechnice. Brno, CERM, 2000.
[9] ejka, M., Matyáš. V.: Elektronická micí technika. Skriptum VUT Brno, 2001.
[10] Vít, V. a kol.: Televizní technika. Alfa Praha, 1979
[11] Musil, V., Brzobohatý, J., Boušek, J., Prchalová, I.: Elektronické souástky. Skriptum VUT Brno, Vutium 2000
[12] Proceedings of the 10th Conference and Competition STUDENT EEICT 2004, Vol. 1
[13] Proceedings of the 11th Conference and Competition STUDENT EEICT 2005, Vol. 1

70
PÍLOHA
V píloze jsou uvedena schémata zapojení použitá pi simulacích nkterých funkních blok navrhovaného mie odstupu signálu od šumu v programu PSpice. Dále jsou zde vloženy charakteristiky, které nebyly pímo použity jako souást textu diplomové práce, ale mohou pitom posloužit pro lepší pochopení funkce jednotlivých ástí.
Obr. 64: Ovení innosti emitorového sledovae s pipojenými Cauerovými filtry
Obr. 65: Amplitudov kmitotové charakteristiky filtr pipojených na výstup emitorového
sledovae pro initele jakosti rezonanních obvod Q = 10 a Q = 1000

71
Obr. 66: asové prbhy signál v jednotlivých kontrolních bodech, shora: prbh naptí testovacího signálu na výstupu emitorového sledovae, prbh naptí na výstupu dolní propusti (pozn.: signál má vlivem pizpsobení poloviní amplitudu a je superponován na stejnosmrném naptí daném emitorovým sledovaem – ve skuteném zapojení je vstup DP vázán k emitorovému sledovai stídav), testovací kompozitní videosignál na vstupu emitorového sledovae a dole parazitní zákmity na výstupu horní propusti
Obr. 67: Schéma zapojení použité pro simulaci innosti klíovaného obnovitele
stejnosmrné složky testovacího kompozitního videosignálu
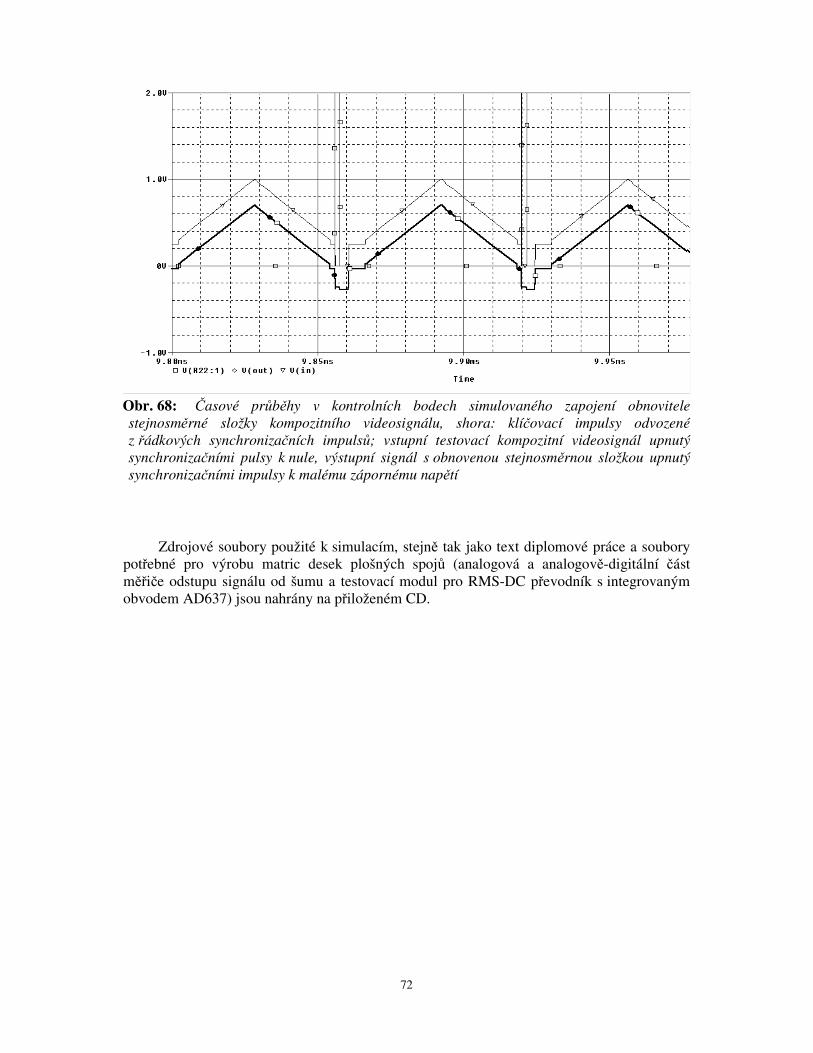
72
Obr. 68: asové prbhy v kontrolních bodech simulovaného zapojení obnovitele stejnosmrné složky kompozitního videosignálu, shora: klíovací impulsy odvozené z ádkových synchronizaních impuls; vstupní testovací kompozitní videosignál upnutý synchronizaními pulsy k nule, výstupní signál s obnovenou stejnosmrnou složkou upnutý synchronizaními impulsy k malému zápornému naptí
Zdrojové soubory použité k simulacím, stejn tak jako text diplomové práce a soubory potebné pro výrobu matric desek plošných spoj (analogová a analogov-digitální ást mie odstupu signálu od šumu a testovací modul pro RMS-DC pevodník s integrovaným obvodem AD637) jsou nahrány na piloženém CD.