bigavr6 système de développement manuel...
TRANSCRIPT

BIGAVR 6™
Manuel utilisateur
Les systèmes de développement MikroElektronika sont des outils irremplaça-bles pour le développement et la programmation des microcontrôleurs. Un choix attentif des composants ainsi que l’utilisation d’appareils de dernière génération pour le montage et le test constitue la meilleure garantie de fi abilité de nos produits. Grâce à leur simplicité, leur nombre important de modules intégrés et d’exemples prêt à l’emploi, tous nos utilisateurs, indépendamment de leur expérience, ont la possibilité de réaliser leur projet de manière rapide et effi cace.
Syst
ème
de d
ével
oppe
men
t
Pou
r plu
s d’
info
rmat
ion
sur n
os p
rodu
its, n
’hés
itez
pas
à co
nsul
tez
notre
site
inte
rnet
: ww
w.m
ikro
e.co
m
Si v
ous
renc
ontre
z de
s pr
oblè
mes
ave
c un
de
nos
prod
uits
ou
si v
ous
souh
aite
z ob
teni
r des
info
rmat
ions
sup
plém
enta
ires,
con
tact
ez
notre
ser
vice
tech
niqu
e: w
ww
.mik
roe.
com
/en/
supp
ort
Pou
r tou
te q
uest
ion,
rem
arqu
e ou
pro
posi
tion
com
mer
cial
e, n
’hés
itez
pas
à no
us c
onta
ctez
: offi
ce@
mik
roe.
com

CHER CLIENT,
Je tiens à vous remercier pour l’intérêt que vous avez porté à nos produits et pour la confi ance que vous avez accordée à MikroElektronika.Notre objectif est de vous fournir des produits de la meilleure qualité possible. En outre, nous continuerons à améliorer nos performances afi n de répondre à vos besoins.
The Atmel name and logo, the Atmel logo, AVR, AVR (Logo), AVR Freaks, AVR Freaks (Logo), AVR Studio, IDIC, megaAVR, megaAVR (Logo), picoPower ®, tinyAVR ® are trademarks of Atmel Coorporation.
COPYRIGHT ET LIMITES DE RESPONSABILITE:
Cet environnement de développement et tous ses documents sont détenus par MikroElektronika. Ces derni-ers sont protégés par la règlementation sur le copyright ainsi que par les traités internationaux du copyright. Ce manuel est également soumis aux lois sur le copyright. Il ne devra en aucun cas être reproduit dans son intégralité ou de façon partielle (de quelque façon que ce soit) sans l’autorisation préalable écrite de Mikro-Elektronika. L’édition PDF du manuel pourra être imprimée pour un usage privé ou une utilisation locale mais en aucun cas dans le cadre d’une distribution. La modifi cation de ce manuel est interdite.
MikroElektronika fournit ce manuel “tel quel”, sans garantie d’aucune sorte, explicite ou implicite, y compris, mais sans limitation les garanties implicites ou les conditions marchandes ou d’adéquation pour un usage particulier.
En aucun cas, MikroElektronika, ses administrateurs, dirigeants, employés ou distributeurs ne pourrons être tenus responsables pour tous dommages indirects, spécifi ques, accessoires ou consécutifs que ce soient (y compris les dommages pour perte de bénéfi ce commercial, interruption d’exploitation commercial, perte d’informations et de données à caractère commercial ou tout autre perte fi nancière) résultant de l’utilisation ou de l’incapacité à pouvoir utiliser les produits MikroElektronika (compilateurs et kits d’évaluation) ou de tout défaut ou erreur dans ce manuel, même si MikroElektronika a été informé de la possibilité de tels dom-mages.
ACTIVITES A HAUTS RISQUES
Les produits MikroElektronika ne sont ni fault-tolerant (résistant aux pannes) ni conçus, fabriqués ou desti-nés à être utilisés ou revendus comme: équipements de contrôle de chaînes de production ou d’assemblage dans des conditions dangereuses nécessitant des performances fail-safe (sécurité intégrée), matériels opérant sur des sites nucléaires, systèmes de navigation et de communication d’avions, équipements de contrôle du trafi c aérien, matériels médicaux d’assistance à la vie ou systèmes d’armement pour lesquels une défaillance logicielle pourrait entraîner la mort, des blessures ou d’importants dégâts physiques ou envi-ronnementaux (“Activités à haut risque”). MikroElektronika et ses fournisseurs déclinent toute responsabilité impliquant la garantie pour toute utilisation dans le cadre d’activités à hauts risques.
MARQUES DEPOSEES
Le nom Mikroelektronika et son logo, le logo de Mikroelektronika, mikroC, mikroC PRO, mikroBasic, mikro-Basic PRO, mikroPascal, mikroPascal PRO, AVRfl ash, PICfl ash, dsPICprog, 18FJprog, PSOCprog, AVR-prog, 8051prog, ARMfl ash, EasyPIC5, EasyPIC6, BigPIC5, BigPIC6, dsPIC PRO4, Easy8051B, EasyARM, EasyAVR5, EasyAVR6, BigAVR2, BIGAVR6, EasydsPIC4A, EasyPSoC4, EasyVR Stamp LV18FJ, LV24-33A, LV32MX, PIC32MX4 MultiMedia Board, PICPLC16, PICPLC8 PICPLC4, SmartGSM/GPRS, UNI-DS sont des marques de Mikroelektronika. Toutes les autres marques mentionnées dans ce manuel sont des propriétés de leur société respectives.
Tous les noms de produits et noms de société apparaissant dans ce manuel pouvant être ou ne pas être des marques déposées ou des copyrights de leur société respectives, sont utilisés uniquement pour identifi cation, explication à l’avantage de leur propriétaire, sans intention de nuire.
©MikroelektronikaTM, 2009, All Rights Reserved.
Nebojsa MaticGeneral Manager

�Système de développement BIGAVR 6
MikroElektronika
page
TABLE DES MATIERES
Présentation du système de développement BIGAVR6 ................................................................... 4Caractéristiques principales ............................................................................................................. 51.0. Connexion au PC ...................................................................................................................... 62.0. Microcontrôleurs supportés ....................................................................................................... 73.0. Programmateur embarqué AVRprog USB 2.0 ........................................................................... 94.0. Programmateur externe AVR ISP mkII ...................................................................................... 105.0 Connecteur JTAG ...................................................................................................................... 116.0 EEPROM série .......................................................................................................................... 117.0. Alimentation électrique .............................................................................................................. 128.0. Tension de référence ................................................................................................................. 139.0. Interface de communication USB .............................................................................................. 1310.0. Interface de communication RS-232 ....................................................................................... 1411.0. Interface de communication CAN ............................................................................................ 1512.0. Entrées de Test du convertisseur A/N (module ADC) .............................................................. 1613.0. Capteur de température DS1820 ............................................................................................ 1714.0. Horloge temps réel (RTC) ....................................................................................................... 1815.0. Lecteur MMC/SD ..................................................................................................................... 1916.0. LEDs ....................................................................................................................................... 2017.0. Boutons poussoirs ................................................................................................................... 2118.0. Afficheur LCD 2x16 .................................................................................................................. 2219.0. Afficheur graphique LCD 128x64 ............................................................................................ 2320.0. Panneau tactile (Touch Panel) ................................................................................................. 2421.0. Ports d’Entrées/Sorties ............................................................................................................ 25

� Système de développement BIGAVR 6
MikroElektronika
page
Présentation du système de développement BIGAVR6
Le système de développement BIGAVR6™ est un outil de grande qualité destiné à la programmation et à l’expérimentation sur microcontrôleur AVR® de Atmel®. La carte inclue un programmateur servant d’interface entre le microcontrôleur et le PC utilisateur. Vous n’avez donc qu’à écrire votre code dans un de nos compilateurs, générer un fichier .hex puis programmer votre microcontrôleur grâce au programmateur AVRprog™. De nombreux modules embarqués, comme l’afficheur LCD graphique 128x64, l’afficheur LCD alphanumérique 2x16, l’horloge temps réel, l’EEPROM série etc., vous seront d’une grande aide pour la simulation.
Carte de développement toutes options et conviviale pour microcontrôleurs AVR
Programmateur haute perfor-mance USB 2.0 embarqué
Connexion possible d’un écran tactile (afficheur LCD + panneau tactile)
Lecteur pour cartes mémoires MMC/SD
Afficheur LCD Graphique avec rétro-éclairage
Spécification du système:
Alimentation: par connecteur AC/DC (de 7V à 23V AC ou de 9V à 32V DC); par câble USB (5V DC)Consommation: 50mA en mode idle (lorsque tous les modules de la carte sont inactifs)Dimensions: 26,5 x 22cm (10,4 x 8,6inch)Poids: ~417g (0.92lbs)
Contenu du pack:
Système de développement: BIGAVR6CD: CD contenant le software associé Câbles: Câble USBDocumentation: Manuels BIGAVR6 et AVRflash, Installation drivers USB et schéma électronique du système
Le programme AVRflash™ fournit la liste complète de tous les microcontrôleurs supportés. La dernière version de ce programme avec la liste mise à jour est téléchargeable à partir de notre site www.mikroe.com
�Système de développement BIGAVR 6
MikroElektronika
page1 2 3 87 1110
161920
26
13
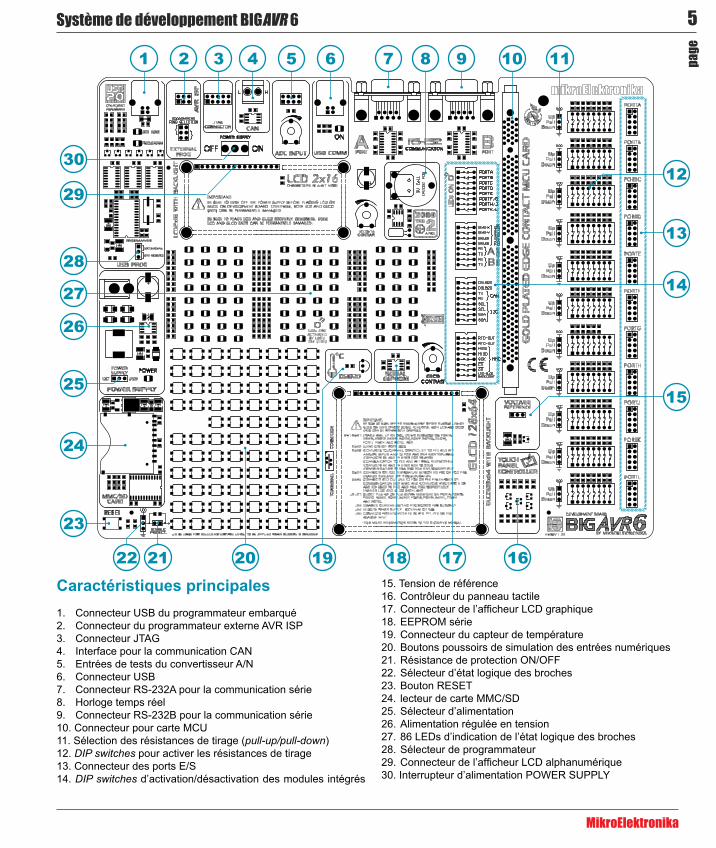
Caractéristiques principales1. Connecteur USB du programmateur embarqué2. Connecteur du programmateur externe AVR ISP3. Connecteur JTAG4. Interface pour la communication CAN5. Entrées de tests du convertisseur A/N6. Connecteur USB7. Connecteur RS-232A pour la communication série 8. Horloge temps réel9. Connecteur RS-232B pour la communication série10. Connecteur pour carte MCU11. Sélection des résistances de tirage (pull-up/pull-down)12. DIP switches pour activer les résistances de tirage13. Connecteur des ports E/S14. DIP switches d’activation/désactivation des modules intégrés
15. Tension de référence16. Contrôleur du panneau tactile17. Connecteur de l’afficheur LCD graphique 18. EEPROM série19. Connecteur du capteur de température20. Boutons poussoirs de simulation des entrées numériques21. Résistance de protection ON/OFF 22. Sélecteur d’état logique des broches 23. Bouton RESET24. lecteur de carte MMC/SD25. Sélecteur d’alimentation26. Alimentation régulée en tension27. 86 LEDs d’indication de l’état logique des broches 28. Sélecteur de programmateur29. Connecteur de l’afficheur LCD alphanumérique30. Interrupteur d’alimentation POWER SUPPLY
23
24
6 9
12
14
15
30
21
27
4 5
18 1722
29
28
25

6 Système de développement BIGAVR 6
MikroElektronika
page
1.0. Connexion au PC
Etape 1:
Suivez les instructions pour l’installation des pilotes USB et du programmateur AVRflash fournis dans les manuels associés. L’utilisation du système de développement n’est possible qu’une fois les pilotes installés. Dans le cas où l’un des compilateurs MikroElektronika est déjà installé sur votre PC, il n’est pas nécessaire de réinstaller les drivers USB (dans la mesure où ceux-ci ont été installés en même temps que le compilateur)
Etape 2:
Utilisez le câble USB fournit pour connecter le système de développement BIGAVR6 à votre PC. Une extrémité du câble USB (fiche USB B) devra être connectée à la carte de développement comme décrit Figure 1-2, tandis que l’autre extrémité (fiche USB A) devra être connectée à votre PC. Avant d’établir la connexion, assurez vous que le jumper J14 est bien placé sur la position USB comme indiquée Figure 1-1.
Etape 3:
Démarrez votre système de développement en poussant l’interrupteur d’alimentation sur la position ON. Les LEDs POWER et USB LINK vont s’allumer, signifiant que votre système de développement est prêt à être utilisé. Utilisez le logiciel AVRflash pour charger votre code dans le microcontrôleur et servez vous de la carte pour tester et développer votre projet.
NOTE: Si vous souhaitez ajouter des modules complémentaires comme des afficheurs LCD ou GLCD, cartes supplémentaires etc., il est indispensable de les placer correctement avant la mise sous tension. Dans le cas contraire, les modules additionnels ainsi que le système de développement pourraient être définitivement endommagés.
Figure 1-2: Connexion du câble USB
1
2
Figure 1-1: Alimentation
Figure 1-3 : Placement des modules complémentaires sur la carte
Sélecteur d’alimentation J14
Connecteur DC
Interrupteur POWER SUPPLY
Connecteur USB

�Système de développement BIGAVR 6
MikroElektronika
page
2.0. Microcontrôleurs supportésLe système de développement BIGAVR6 est équipé d’un connecteur DIMM-168P utilisé pour brancher une carte MCU. Le système de développement est vendu avec une carte MCU intégrant le microcontrôleur ATMEGA128 TQFP 64 broches (voir Figure 2-3). Cette carte possède également un oscillateur ainsi qu’un panneau de connexions de 80 broches relié au microcontrôleur. Le nom de chaque broche du microcontrôleur est associé à un point de connexion. Ces points de connexions facilitent l’utilisation de la carte lorsqu’elle est ensuite utilisée dans un dispositif cible.
Figure 2-1: Connecteur DIMM-168P
Figure 2-2: Connecteur DIMM-168P avec carte MCU branchée
Figure 2-3: Carte MCU avec microcontrôleur TQFP 64 broches
Figure 2-4: Brochage du connecteur DIMM-168P
Connecteur DIMM-168P pour le branchement de la carte MCU avec microcontrôleur TQFP
� Système de développement BIGAVR 6
MikroElektronika
page
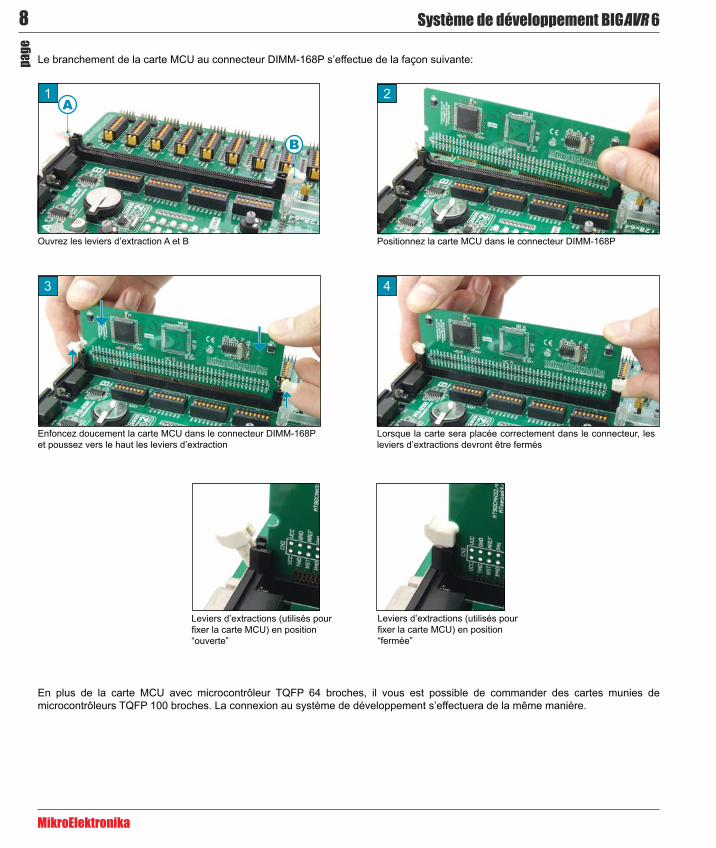
Le branchement de la carte MCU au connecteur DIMM-168P s’effectue de la façon suivante:
Leviers d’extractions (utilisés pour fixer la carte MCU) en position “fermée”
Leviers d’extractions (utilisés pour fixer la carte MCU) en position “ouverte”
En plus de la carte MCU avec microcontrôleur TQFP 64 broches, il vous est possible de commander des cartes munies de microcontrôleurs TQFP 100 broches. La connexion au système de développement s’effectuera de la même manière.
1A
B
Ouvrez les leviers d’extraction A et B
2
Positionnez la carte MCU dans le connecteur DIMM-168P
3
Enfoncez doucement la carte MCU dans le connecteur DIMM-168P et poussez vers le haut les leviers d’extraction
4
Lorsque la carte sera placée correctement dans le connecteur, les leviers d’extractions devront être fermés

�Système de développement BIGAVR 6
MikroElektronika
page
3.0. Programmateur embarqué AVRprog USB 2.0Le programmateur est un outil indispensable à la programmation des microcontrôleurs. BIGAVR6 possède un programmateur embarqué (AVRprog) établissant la connexion entre le microcontrôleur et votre PC. Le programme AVRflash est utilisé pour charger un fichier hexadécimal (fichier HEX) dans le microcontrôleur via AVRprog. La Figure 3-2 présente les liens entre le compilateur, le programmateur PICflash et le microcontrôleur.
Figure 3-1: Programmateur AVRprog
NOTE: Pour plus d’informations concernant le programmateur AVRprog et le programme AVRflash, consultez le manuel AVRflash.
Figure 3-3: Fonctionnement du programmateur
Sur la partie gauche de la fenêtre du programmateur AVRflash, vous trouverez différentes options de configuration du microcontrôleur. Les boutons servant au chargement et à la programmation sont disponibles sur la partie droite. Une option en bas de la fenêtre indique la progression du processus de programmation.
2
Rédigez votre code dans un des compilateurs AVR, générez un fichier .hex. puis utilisez le programmateur embarqué pour charger le code dans le microcontrôleur.
1
3
Compilation du programme
Chargement du code HEX
Ecrivez un programme dans un des compilateurs AVR et générez le fichier .hex
Utilisez le programme AVRflash pour sélectionner le microccontrôleur à programmer, puis chargez le fichier HEX;
Cliquez sur le bouton Write et chargez le programme dans le microcontrôleur
2
1
3
Le jumper J21 sert à sélectionner quel pro- grammateur doit être utilisé (programmateur embarqué ou programmateur externe)
Connecteur USB du programmateur
Programmateur: circuit intégré
Figure 3-2: Connecteur USB du programmateur

10 Système de développement BIGAVR 6
MikroElektronika
page
Les microcontrôleurs AVR sont programmés grâce à la communication série SPI. Celle-ci utilise les broches MISO, MOSI et SCK du microcontrôleur.
Pendant la programmation, un multiplexeur dé-connecte les broches du microcontrôleur utilisées pour la programmation du reste de la carte, et les connecte au programmateur AVRprog. Une fois la programmation achevée, ces broches sont déconnectées du programmateur et peuvent ainsi être utilisées comme des lignes d’entrées/sorties.
4.0. Programmateur externe AVR ISP mkIIEn plus du programmateur embarqué, le système de développement BIGAVR6 peut également utiliser le programmateur externe AVR ISP de Atmel pour la programmation des microcontrôleurs. Un tel programmateur se connecte au connecteur AVR ISP. Afin de configurer la carte pour permettre la programmation du microcontrôleur via le programmateur externe, J21 devra occuper la position EXTERNAL avant l’allumage du programmateur. Utilisez ensuite J22 pour choisir la socket cible.
Figure 4-1:Connecteur pour programmateur AVR ISP
Figure 4-2: AVRISP mkII est connecté au système de développement
En position EXTERNAL, J21 active le fonctionnement du programmateur externe AVRISP
En position ON-BOARD, J21 active le fonctionnement du programmateur embarqué
Position du jumper J22 lorsque le programmateur externe est utilisé pour programmer les microcontrôleurs TQFP à 100 broches
Position du jumper J22 lorsque le programmateur externe est utilisé pour programmer les microcontrôleurs TQFP à 64 broches
Jumpers de sélection des broches à connecter au programmateur
Figure 3-4: Fonctionnement du programmateur

11Système de développement BIGAVR 6
MikroElektronika
page
5.0. Connecteur JTAG
JTAG ICEmkII est un programmateur/débogueur utilisé par les microcontrôleurs AVR munis d’interface JTAG intégré (microcontrôleurs Mega AVR). JTAG ICEmkII a été initialement conçu pour les utilisateurs du programme AVR Studio. Le connecteur JTAG intégré aux microcontrôleurs AVR est une version modifiée de l’interface JTAG original. Il permet de modifier le contenu des mémoires internes EEPROM et FLASH (programmation du microcontrôleur).
Figure 5-1: Connecteur JTAG
Le connecteur JTAG est directement relié aux broches du microcontrôleur. Son fonctionnement ne dépend donc pas des de la posi-tion des jumpers.
Le programmateur/débogueur JTAG ICEmkII se branche au système de développement par l’intermédiaire d’un connecteur mâle 2x5
Figure 5-2: JTAG ICEmkII relié à la carte
6.0. EEPROM sérieL’EEPROM (Electrically Erasable Programmable Read-Only Memory) est un module mémoire intégré, destiné à stocker les données ne devant pas être effacées lorsque le courant est éteint. Le 24AA01 est capable de stocker jusqu’à 1Kbit de données. Cette mémoire utilise la communication série I2C via les broches PD0 et PD1 ou PE4 et PE5 pour communiquer avec le microcontrôleur. Pour activer la connexion entre le microcontrôleur et l’EEPROM, il faut positionner les interrupteur 5 et 7 (communication via PD0 et PD1) ou les interrupteurs 6 et 8 (communication via PD4 et PD5) du DIP switch SW14 sur ON.
Figure 6-1: Schéma de connexion de l’EEPROM série
EEPROM série connectée au microcontrôleur via PD0 et PD1

12 Système de développement BIGAVR 6
MikroElektronika
page
7.0. Alimentation électriqueLe système de développement BIGAVR6 supporte deux types d’alimentation électrique:
1. Alimentation +5V PC fournit par le câble USB; 2. Alimentation externe reliée au connecteur AC/DC de la carte de développement.
Le régulateur de tension MC34063A et le redresseur de Gretz autorisent une alimentation AC (comprise entre 7V et 23V) et DC (comprise entre 9V et 32V). Le jumper J14 est utilisé pour la sélection du type d’alimentation. Lorsque la carte est alimentée par USB, le jumper J14 doit être placé en position USB. Dans le cas où l’alimentation externe est utilisée, J14 doit être placé sur la position EXT. Le système de développement est sous tension lorsque l’interrupteur POWER SUPPLY est sur la position ON.
Figure 7-1: Alimentation
Figure 7-2: Schéma de l’alimentation électrique
Connecteur AC/DC
Régulateur de ten-sion
Jumper J14 utilisé pour choisir le type d’alimentation Interrupteur POWER
SUPPLY
Connecteur USB
Connecteur AC/DC
LED POWER SUPPLY
Connecteur USB

1�Système de développement BIGAVR 6
MikroElektronika
page
8.0. Tension de référenceLe système de développement BIGAVR6 est équipé du circuit intégré MCP1541. Celui-ci peut générer une tension de référence destinée au convertisseur A/N. La broche AREF du microcontrôleur est reliée soit à la tension de 5V de l’alimentation, soit à la tension de référence de 4.096V. C’est la position du jumper J18 qui détermine la tension appliquée à AREF.
Figure 8-1: Schéma de connexion de la source de tension de référence au microcontrôleur
Figure 8-2: Jumper J18 en position 4.096V
9.0. Interface de communication USB Le connecteur USB CN25 permet de connecter des périphériques aux microcontrôleurs AVR possédant un module USB intégré. Le microcontrôleur est relié au connecteur USB CN25 par l’intermédiaire des lignes USB-DM et USB-DP. L’allumage de la diode LED ON témoigne de la connexion de la carte avec le périphérique USB.
Figure 9-1: Connecteur USBFigure 9-2: Schéma du connecteur USB
Connecteur USB

1� Système de développement BIGAVR 6
MikroElektronika
page
10.0. Interface de communication RS-232L’USART (universal synchronous/asynchronous receiver/transmitter) est un des moyens le plus couramment utilisé pour l’échange de données entre un PC et ses périphériques. La communication série RS-232 est réalisée par l’intermédiaire du connecteur 9-broches SUB-D et du module USART du microcontrôleur. Le BIGAVR6 est équipé de deux ports RS-232: RS-232A et RS-232B. Servez vous des interrupteurs RX232-A (broche PE0) et TX232-A (broche PE1) du DIP switch SW13 afin d’activer le port RS-232A. En outre, utilisez les interrupteurs RX232-B (PD2 pin) et TX232-B (PD3 pin) du DIP switch SW13 pour activer le port RS-232B. Les broches du microcontrôleur utilisées pour ce type de communication sont les suivantes: RX - donnée reçue, TX - donnée transmise. Le débit atteint 115 kbps.
Pour permettre la réception de signaux de tensions différentes par le module USART du microcontrôleur, l’utilisation d’un convertis-seur de tension tel que le MAX202C (MAX232) est indispensable.
Figure 10-2: Schéma de connexion du module RS-232
Figure 10-2. Les interrupteurs 5, 6, 7 et 8 du DIP switch SW13 servent à déterminer quelles broches du microcontrôleur sont utilisées comme lignes RX et TX, Figure 10-2.
Figure 10-1: Module RS-232
Connecteur RS-232
Le port RS-232A est connecté au microcontrôleur via PE0 et PE1
1�Système de développement BIGAVR 6
MikroElektronika
page
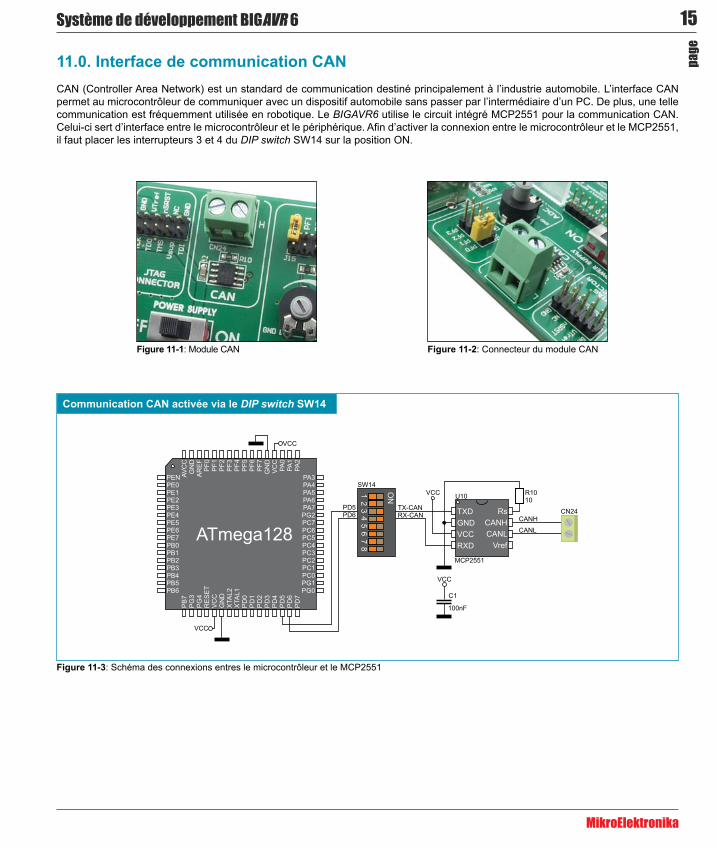
11.0. Interface de communication CANCAN (Controller Area Network) est un standard de communication destiné principalement à l’industrie automobile. L’interface CAN permet au microcontrôleur de communiquer avec un dispositif automobile sans passer par l’intermédiaire d’un PC. De plus, une telle communication est fréquemment utilisée en robotique. Le BIGAVR6 utilise le circuit intégré MCP2551 pour la communication CAN. Celui-ci sert d’interface entre le microcontrôleur et le périphérique. Afin d’activer la connexion entre le microcontrôleur et le MCP2551, il faut placer les interrupteurs 3 et 4 du DIP switch SW14 sur la position ON.
Figure 11-1: Module CAN Figure 11-2: Connecteur du module CAN
Figure 11-3: Schéma des connexions entres le microcontrôleur et le MCP2551
Communication CAN activée via le DIP switch SW14

16 Système de développement BIGAVR 6
MikroElektronika
page
12.0. Entrées de test du convertisseur A/N (module ADC)Un convertisseur Analogique/Numérique a pour rôle de convertir un signal analogique en données numériques. Le convertisseur A/N est linéaire ce qui signifie que la donnée convertie est linéairement dépendante à la tension d’entrée. Le convertisseur A/N situé dans le microcontrôleur convertit une tension analogique en un nombre codé sur 10 bits. La tension d’entrée peut varier de 0 à 5V grâce au potentiomètre P5. Le microcontrôleur équipé d’un convertisseur A/N intégré est alimenté par cette tension via les entrées de tests. Le jumper J15 permet de sélectionner la broche sur laquelle la conversion aura lieu, à savoir PF0, PF1, PF2 ou PF3. La résistance R12 a une fonction de protection dans la mesure où elle sert à limiter le courant à travers le potentiomètre et les broches du microcon-trôleur.
Figure 12-1: ADC (position du jumper par défaut) Figure 12-2: PF0 est utilisé comme entrée du convertisseur A/N
Figure 12-3: Connexions entre les entrées de test du convertisseur A/N et le microcontrôleur
NOTE: Afin d’obtenir une conversion A/N précise, il est nécessaire d’éteindre les LEDs et de déconnecter les jumpers des résistances de tirages des broches utilisées par le convertisseur A/N.
La conversion A/N s’effectue via la broche PF0

1�Système de développement BIGAVR 6
MikroElektronika
page
13.0. Capteur de température DS1820La communication série 1-wire® permet la transmission de données par l’intermédiaire d’une seule ligne de communication, ce qui signifie qu’une seule broche du microcontrôleur est utilisée. Le processus est sous le contrôle du microcontrôleur (maître). Tous les périphériques esclaves ont par défaut un unique code ID. Ceci permet au maître d’identifier facilement les périphériques esclaves partageant la même interface.
Le capteur de température DS1820 utilise le standard 1-wire. Il est capable de mesurer des températures comprises entre -55 et 125°C avec une marge d’erreur de ±0.5°C pour les températures comprises entre -10 to 85°C. Ce capteur requiert une tension d’alimentation comprise entre 3V et 5.5V. La température est calculée avec une résolution de 9 bits en moins de 750ms. Le système de développement BIGAVR6 est équipé d’une interface de connexion destinée au DS1820. Le capteur peut utiliser les broches PB0 ou PG0 pour communiquer avec le microcontrôleur. Le choix de la broche s’effectue grâce aux interrupteurs 1 et 2 du DIP switch SW14.
Figure 13-5: Connexions entre le DS1820 et le microcontrôleur
Figure 13-1: Connecteur DS1820 (DS1820 non branché)
Figure 13-2: DS1820 connecté
Figure 13-3: DS1820 est relié à la broche PB0 du microcontrôleur
Figure 13-4: DS1820 est relié à la broche PG0 du microcontrôleur
NOTE: Assurez vous que le demi cercle inscrit sur la carte correspond au coté arrondi du DS1820
Capteur de température relié à la broche PG0 du microcontrôleur
Bottom view

1� Système de développement BIGAVR 6
MikroElektronika
page
14.0. Horloge temps réel (RTC)Grâce au circuit intégré DS1307, le système de développement BIGAVR6 peut conserver l’heure et la date exacte. Les caractéristiques de l’horloge temps réel sont les suivantes:
- Fournit les informations concernant les secondes, minutes, heures, jours, jours de la semaine et dates, incluant les corrections en cas d’années bissextiles - Interface série I2C - Détection automatique des coupures d’alimentation - Consommation inférieure à 500nA
L’horloge temps réel du BIGAVR6 permet la génération d’une interruption à un temps pré-défini. Afin d’établir la connexion entre le microcontrôleur et l’horloge temps réel, il faut mettre les interrupteurs PD0 et PD1 du DIP switch SW14 ainsi que l’interrupteur PD3 du DIP switch SW15 en position ON. Dans le cas où le microcontrôleur utilisé n’est pas le ATMEGA128 TQFP 64 broches (microcontrôleur fournit avec BIGAVR6), les interrupteurs PE4, PE5 et PE6 pourront être utilisés pour la communication I2C.
Figure 14-2: Connexions entre l’horloge temps réel et le microcontrôleur
Figure 14-1: Horloge temps réel
Quartz servant d’horloge temps réel
Batterie 3V permettant le fonctionnement de l’horloge lorsque l’alimentation du système est éteinte
Horloge temps réel reliée aux broche PD0, PD1 et PD3 du microcontrôleur

1�Système de développement BIGAVR 6
MikroElektronika
page
15.0. Lecteur MMC/SD Ce module permet d’interfacer des cartes mémoires avec le microcontrôleur. La carte mémoire requière une tension d’alimentation de 3.3V tandis que le microcontrôleur est alimenté par une tension de 5V (VCC). C’est le régulateur de tension REG1 qui fournit une tension de 3.3V (VCC-MMC) au lecteur MMC/SD. Pour d’établir une communication entre la carte mémoire et le microcontrôleur, il est donc indispensable d’ajuster le niveau de tension de leurs lignes de communication: c’est le rôle du bus transceiver 74LVCC3245. Enfin, les interrupteurs 3,4 ,5 ,6 et 7 du DIP switch SW15 devront être en position ON afin d’activer la communication entre le microcontrôleur et la carte mémoire.
Figure 15-2: Carte mémoire MMC/SD
Figure 15-3: Schéma de connexion entre le lecteur MMC/SD et le microcontrôleur
Communication entre la carte MMC/SD et le microcontrôleur via les lignes MISO, MOSI, SCK, MMC-CS et MMC-CD
Figure 15-1: Lecteur MMC/SD

20 Système de développement BIGAVR 6
MikroElektronika
page
16.0. LEDsUne diode LED (Light-Emitting Diode) est un composant électronique particulier utilisé comme source de lumière. Pour chacune des LEDs, l’utilisation d’une résistance pour limiter le courant est indispensable. La tension aux bornes d’une LED standard est de l’ordre de 2.5V tandis que le courant peut varier entre 1mA et 20mA. L’intensité du courant qui traverse les LED de BIGAVR6 est de 1mA.
BIGAVR6 possède 86 LEDs dont le but est d’indiquer visuellement (présence ou non de lumière) l’état de chacune des broches E/S du microcontrôleur. Une LED allumée (active) traduit la présence d’un un logique (1) sur la broche. Utilisez le DIP switch SW12 afin de choisir les ports (PORTA, PORTB, PORTC, PORTD, PORTE, PORTF, PORTG, PORTH, PORTJ, PORTK ou PORTL) que vous souhaitez visualiser.
Figure 16-2: Schéma de connexion des LEDs du PORTA
Figure 16-1: LEDs
Microcontrôleur
Résistance limitant le courant traversant la LED
Encoche indiquant la cathode de la LED
Les LED du port PORTA sont activées

21Système de développement BIGAVR 6
MikroElektronika
page
17.0. Boutons poussoirsL’état logique de toutes les entrées numériques du microcontrôleur peut être modifié par l’intermédiaire des boutons poussoirs. Le jumper J12 sert à définir l’état logique qui doit être appliqué à la broche du microcontrôleur lorsque le bouton associé est pressé. Les résistances de protection ont pour but de limiter le courant maximum afin de prévenir d’éventuels court-circuits. Si besoin est, les utilisateurs expérimentés ont la possibilité de court-circuiter ces résistances grâce au jumper J13. A coté de ces boutons poussoirs, on trouve le bouton RESET. Celui-ci n’est pas relié directement à la broche MCLR. Le signal reset (réinitialisation) est généré par le programmateur.
Figure 17-2: Schéma de connexion des boutons poussoirs du PORTC
Figure 17-1: Boutons poussoirs
Pressez n’importe quel bouton poussoir lorsque J12 est dans la position VCC, un 1 logique (5V) sera appliqué à la broche associée du microcontrôleur (voir Figure 17-2).
Le Jumper J12 sert à choi-sir l’état logique à appliquer à la broche si un bouton est pressé
Bouton RESET
Le Jumper J13 sert à court-circuiter la résistance de pro-tection
Boutons poussoirs utilisés pour simuler les entrées numériques
Jumper J12 en position VCC

22 Système de développement BIGAVR 6
MikroElektronika
page
18.0. Afficheur LCD 2x16 La carte de développement BIGAVR6 est équipée d’un connecteur pour afficheur LCD alphanumérique 2x16. Ce connecteur est relié au microcontrôleur via le PORTC. Le potentiomètre P4 est utilisé pour l’ajustement du contraste. L’interrupteur 8 (LCD-GLCD BACKLIGHT) du DIP switch SW15 sert à allumer ou éteindre le rétro-éclairage.La communication entre le microcontrôleur et l’afficheur LCD s’effectue en mode 4 bits (4-bit mode). Les symboles alphanumériques sont représentés sur deux lignes, chacune pouvant contenir jusqu’à 16 caractères de taille 7x5 pixels.
Figure 18-3: Schéma des connexions entre l’afficheur alphanumérique LCD 2x16 et le microcontrôleur
Figure 18-1: Connecteur de l’afficheur alphanumérique Figure 18-2: Afficheur alphanumérique LCD 2x16
Le rétro-éclairage de l’afficheur LCD est allumé
Potentiomètre d’ajustement du contraste

2�Système de développement BIGAVR 6
MikroElektronika
page
19.0. Afficheur graphique LCD 128x64 L’afficheur graphique LCD 128x64 (128x64 GLCD) permet l’affichage de données graphiques complexes. Il communique avec le microcontrôleur par l’intermédiaire des ports PORTA et PORTE. L’afficheur GLCD a une résolution de 128x64 pixels, ce qui rend possible l’affichage de diagrammes, tableaux et autres graphiques. Le potentiomètre P3 sert à ajuster le contraste de l’afficheur GLCD. L’interrupteur 8 (LCD-GLCD BACKLIGHT) du DIP switch SW15 est utilisé pour activer/désactiver le rétro-éclairage.
Figure 19-3: Schéma de connexion de l’afficheur GLCD
Figure 19-2: Connecteur GLCDFigure 19-1: Afficheur GLCD
Connecteur du GLCD
Connecteur du panneau tactile
Le rétro-éclairage de l’afficheur GLCD est allumé
Potentiomètre d’ajuste-ment du contraste

2� Système de développement BIGAVR 6
MikroElektronika
page
La Figure 20-3 présente en détail comment connecter le touch panel au système de développement. Positionnez l’extrémité du câble plat sur le connecteur CN22, (Figure 1). Branchez le câble au connecteur (Figure 2) et presser doucement (Figure 3). Seulement après avoir effectué ces opérations, vous pourrez connecter l’afficheur GLCD au connecteur approprié (Figure 4).
NOTE: Les LEDs et les résistances de tirage des ports PORTF et PORTG doivent être désactivées pendant l’utilisation du touch panel.
La Figure 20-1 vous montre comment placer le touch panel sur l’afficheur GLCD. Assurez vous que le câble plat est situé sur la gauche de l’afficheur GLCD, comme décrit Figure 4.
20.0. Panneau tactile (touch panel)Le touch panel est un panneau fin, adhésif et transparent sensible au toucher. Il se place sur l’afficheur GLCD et le “transforme” ainsi en écran tactile. En effet, il enregistre les pressions effectuées sur l’afficheur et envoie les coordonnées sous forme d’un signal analogique au microcontrôleur. Les interrupteurs 1, 2, 3 et 4 du DIP switch SW13 sont utilisés pour relier le touch panel au microcontrôleur.
Figure 20-2: Schéma de connexion du Touch panel
Figure 20-3: Connexion du panneau tactile
4321
1 2 3 4
Figure 20-1: Placement du touch panel sur le GLCD
Panneau tactile connecté au microcontrôleur via PF0, PF1, PG3 et PG4

2�Système de développement BIGAVR 6
MikroElektronika
page
21.0. Ports d’Entrées/SortiesSur le côté droit de la carte de développement se trouve onze connecteurs 10-broches reliés aux ports d’E/S du microcontrôleur. Les broches PB1, PB2, PB3, PE0 et PE1 sont connectées au connecteur 10-broches via le multiplexeur du programmateur. Les DIP switches SW1-SW11 assurent le lien entre les broches E/S et les résistances de tirage. La position des jumpers J1-J11 détermine si les ports utilisent une résistance de pull-up ou de pull-down.
Figure 21-4: Schéma de connexion du PORTA
Figure 21-2: J2 en position pull-down
Figure 21-3: J2 en position pull-up
Jumper de sélection pull-up/pull-down
Figure 21-1: Ports E/S
DIP switch pour connecter les résistances de tirages aux broches
Connecteur mâle 2x5 du PORTG
Module additionnel connecté au PORTC
Broches du Port PORTA connectées aux résistances de pull-down

26 Système de développement BIGAVR 6
MikroElektronika
page
Les résistances de pull-up/pull-down vous permettent de forcer l’état logique de toutes les entrées du microcontrôleur en mode idle (“en attente“). Cet état dépend de la positon des jumpers J7 et J12. La broche PG2 et son DIP switch associé SW7, le jumper J7 et le bouton poussoir PG2 et le jumper J12 sont utilisés ici dans le but de vous expliquer le rôle des résistances de tirage. Leur principe de fonctionnement est le même pour toutes les broches du microcontrôleur.
Afin de permettre la connexion des broches du PORTG aux résistances de pull-down, il faut tout d’abord mettre le jumper J7 en position basse (à la masse). Ainsi, toutes les broches du PORTG en mode idle se verront attribuer un zéro logique (0V) par l’intermédiaire du jumper J7 et de la résistance 8x10K. Pour fournir un tel signal à la broche PG2, il est indispensable de placer l’interrupteur de la broche PG2 du DIP switch SW7 sur la position ON. Placez maintenant le jumper J12 en position VCC (pull-up).
En conséquence, chaque fois que vous presser-ez le bouton poussoir PG2, un un logique (1) ap-paraîtra sur la broche PG2. Ce 1 logique provient du fait que J12 est en position VCC.
Afin de permettre la connexion des broches du PORTG aux résistances de pull-up, il faut tout d’abord mettre le jumper J7 en position haute (VCC). Ainsi, toutes les broches du PORTG en mode idle se verront attribuer un 1 logique (5V) par l’intermédiaire du jumper J7 et de la résistance 8x10K. Pour fournir un tel signal à la broche PG2, il est indispensable de placer l’interrupteur de la broche PG2 du DIP switch SW7 sur la position ON. Placez maintenant le jumper J12 en position basse (pull-down).
En conséquence, chaque fois que vous presser-ez le bouton poussoir PG2, un zéro logique (0) apparaîtra sur la broche PG2. Ce 0 logique provi-ent du fait que le jumper J12 est placé en position GND (à la masse).
Dans le cas où les J7 et J12 occupent la même position, la pression d’un bouton poussoir n’entraînera aucune modification de l’état logique sur les broches d’entrées du microcontrôleur.
Figure 21-5: Jumper J7 en position pull-down et jumper J12 en position pull-up
Figure 21-6: Jumper J7 en position pull-up et jumper J12 en position pull-down
Figure 21-7: Jumpers J7 et J12 occupent la même position

CHER CLIENT,
Je tiens à vous remercier pour l’intérêt que vous avez porté à nos produits et pour la confi ance que vous avez accordée à MikroElektronika.Notre objectif est de vous fournir des produits de la meilleure qualité possible. En outre, nous continuerons à améliorer nos performances afi n de répondre à vos besoins.
The Atmel name and logo, the Atmel logo, AVR, AVR (Logo), AVR Freaks, AVR Freaks (Logo), AVR Studio, IDIC, megaAVR, megaAVR (Logo), picoPower ®, tinyAVR ® are trademarks of Atmel Coorporation.
COPYRIGHT ET LIMITES DE RESPONSABILITE:
Cet environnement de développement et tous ses documents sont détenus par MikroElektronika. Ces derni-ers sont protégés par la règlementation sur le copyright ainsi que par les traités internationaux du copyright. Ce manuel est également soumis aux lois sur le copyright. Il ne devra en aucun cas être reproduit dans son intégralité ou de façon partielle (de quelque façon que ce soit) sans l’autorisation préalable écrite de Mikro-Elektronika. L’édition PDF du manuel pourra être imprimée pour un usage privé ou une utilisation locale mais en aucun cas dans le cadre d’une distribution. La modifi cation de ce manuel est interdite.
MikroElektronika fournit ce manuel “tel quel”, sans garantie d’aucune sorte, explicite ou implicite, y compris, mais sans limitation les garanties implicites ou les conditions marchandes ou d’adéquation pour un usage particulier.
En aucun cas, MikroElektronika, ses administrateurs, dirigeants, employés ou distributeurs ne pourrons être tenus responsables pour tous dommages indirects, spécifi ques, accessoires ou consécutifs que ce soient (y compris les dommages pour perte de bénéfi ce commercial, interruption d’exploitation commercial, perte d’informations et de données à caractère commercial ou tout autre perte fi nancière) résultant de l’utilisation ou de l’incapacité à pouvoir utiliser les produits MikroElektronika (compilateurs et kits d’évaluation) ou de tout défaut ou erreur dans ce manuel, même si MikroElektronika a été informé de la possibilité de tels dom-mages.
ACTIVITES A HAUTS RISQUES
Les produits MikroElektronika ne sont ni fault-tolerant (résistant aux pannes) ni conçus, fabriqués ou desti-nés à être utilisés ou revendus comme: équipements de contrôle de chaînes de production ou d’assemblage dans des conditions dangereuses nécessitant des performances fail-safe (sécurité intégrée), matériels opérant sur des sites nucléaires, systèmes de navigation et de communication d’avions, équipements de contrôle du trafi c aérien, matériels médicaux d’assistance à la vie ou systèmes d’armement pour lesquels une défaillance logicielle pourrait entraîner la mort, des blessures ou d’importants dégâts physiques ou envi-ronnementaux (“Activités à haut risque”). MikroElektronika et ses fournisseurs déclinent toute responsabilité impliquant la garantie pour toute utilisation dans le cadre d’activités à hauts risques.
MARQUES DEPOSEES
Le nom Mikroelektronika et son logo, le logo de Mikroelektronika, mikroC, mikroC PRO, mikroBasic, mikro-Basic PRO, mikroPascal, mikroPascal PRO, AVRfl ash, PICfl ash, dsPICprog, 18FJprog, PSOCprog, AVR-prog, 8051prog, ARMfl ash, EasyPIC5, EasyPIC6, BigPIC5, BigPIC6, dsPIC PRO4, Easy8051B, EasyARM, EasyAVR5, EasyAVR6, BigAVR2, BIGAVR6, EasydsPIC4A, EasyPSoC4, EasyVR Stamp LV18FJ, LV24-33A, LV32MX, PIC32MX4 MultiMedia Board, PICPLC16, PICPLC8 PICPLC4, SmartGSM/GPRS, UNI-DS sont des marques de Mikroelektronika. Toutes les autres marques mentionnées dans ce manuel sont des propriétés de leur société respectives.
Tous les noms de produits et noms de société apparaissant dans ce manuel pouvant être ou ne pas être des marques déposées ou des copyrights de leur société respectives, sont utilisés uniquement pour identifi cation, explication à l’avantage de leur propriétaire, sans intention de nuire.
©MikroelektronikaTM, 2009, All Rights Reserved.
Nebojsa MaticGeneral Manager

BIGAVR 6™
Manuel utilisateur
Les systèmes de développement MikroElektronika sont des outils irremplaça-bles pour le développement et la programmation des microcontrôleurs. Un choix attentif des composants ainsi que l’utilisation d’appareils de dernière génération pour le montage et le test constitue la meilleure garantie de fi abilité de nos produits. Grâce à leur simplicité, leur nombre important de modules intégrés et d’exemples prêt à l’emploi, tous nos utilisateurs, indépendamment de leur expérience, ont la possibilité de réaliser leur projet de manière rapide et effi cace.
Syst
ème
de d
ével
oppe
men
t
Pou
r plu
s d’
info
rmat
ion
sur n
os p
rodu
its, n
’hés
itez
pas
à co
nsul
tez
notre
site
inte
rnet
: ww
w.m
ikro
e.co
m
Si v
ous
renc
ontre
z de
s pr
oblè
mes
ave
c un
de
nos
prod
uits
ou
si v
ous
souh
aite
z ob
teni
r des
info
rmat
ions
sup
plém
enta
ires,
con
tact
ez
notre
ser
vice
tech
niqu
e: w
ww
.mik
roe.
com
/en/
supp
ort
Pou
r tou
te q
uest
ion,
rem
arqu
e ou
pro
posi
tion
com
mer
cial
e, n
’hés
itez
pas
à no
us c
onta
ctez
: offi
ce@
mik
roe.
com