better robots 1 the goal: more robots enabling fewer soldiers military “robots” today lack...
TRANSCRIPT

Better Robots 1
The Goal: More Robots Enabling Fewer Soldiers• Military “robots” today lack autonomy
– Currently, many soldiers control one robot– Want few soldiers working with a team of agile robots (force multiplication)
– Put less soldiers in harms way
• Better robots for monitoring– Enable soldiers w/ persistent and pervasive
ISR, including from hard to reach places (e.g., inside buildings/caves)
• Better robots for logistics– Replace soldiers in the supply chain w/
autonomous robots and vehicles
RQ1-Predator GCS

Better Robots 2
Technical Approach
• This is “a new kind of war” - robots (and soldiers) must quickly deploy and adapt in a huge variety of war-fighting conditions.
• Our technical approach emphasizes:– Planning and Reasoning under Uncertainty. – Perception and Awareness. – Control for Manipulation and Mobility.
• Including land, sea, and air mobility.
– Communication and Coordination.

Better Robots 3
Example: UAV Control
• Raven, Predator, Global Hawk,…• Pilots say “It’s like flying a plane
while looking through a straw”
• UAVs shouldn’t be constrained by the pilot– Pull more “G’s”– High-bandwidth, sensor-rich control
• Better control can improve maneuverability and efficiency

Better Robots 4
Example: UAV Control
• Machine learning control laws can expand the flight envelope (e.g., perching, flying in buildings/caves)
QuickTime™ and aH.264 decompressor
are needed to see this picture.
• GPS-denied navigation• Energy harvesting: In most environmental conditions,
Global Hawk loitering could consume zero energy (there is energy in the air)
330 fps
Better Robots 5
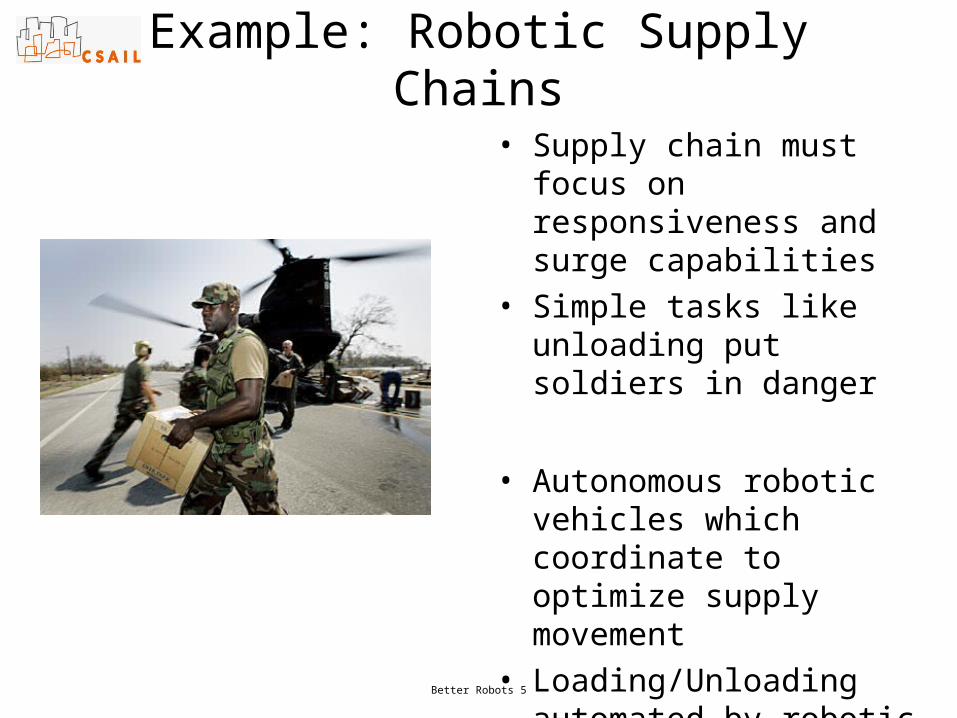
Example: Robotic Supply Chains
• Supply chain must focus on responsiveness and surge capabilities
• Simple tasks like unloading put soldiers in danger
• Autonomous robotic vehicles which coordinate to optimize supply movement
• Loading/Unloading automated by robotic workers
Better Robots 6
Example: Robotic Unloading
• Robust manipulation
• Key principles:– Reasoning about
uncertainty– Mechanical compliance– Working w/ humans (safe
& robots take the easy packages)
Video of domo + tlp’s sim
Better Robots 7
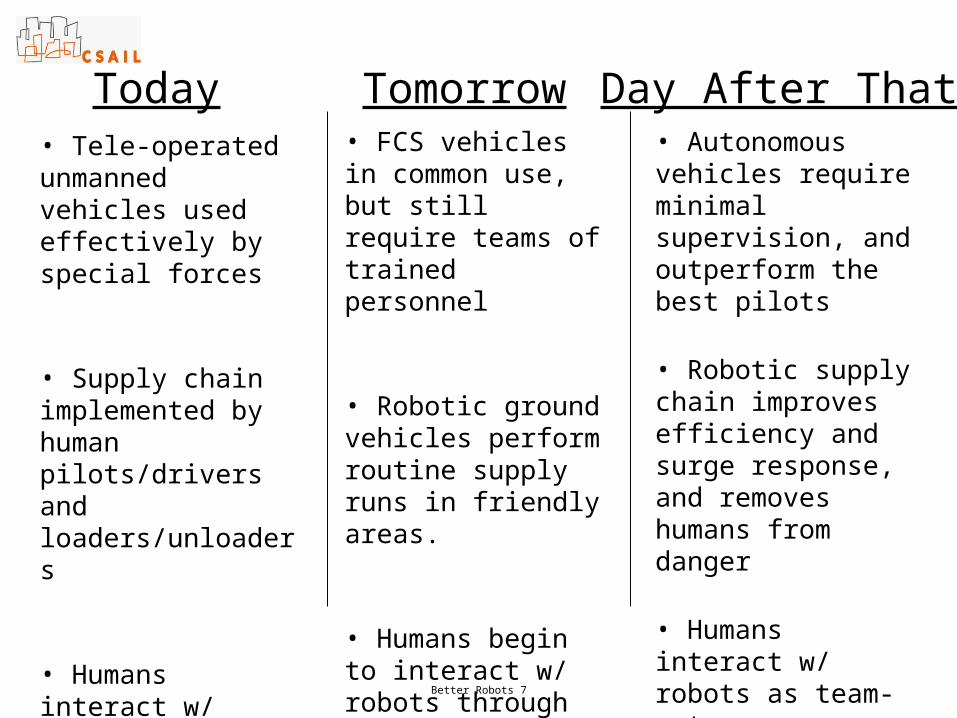
Today Tomorrow Day After That• Tele-operated unmanned vehicles used effectively by special forces
• Supply chain implemented by human pilots/drivers and loaders/unloaders
• Humans interact w/ robots through joystick interfaces
• FCS vehicles in common use, but still require teams of trained personnel
• Robotic ground vehicles perform routine supply runs in friendly areas.
• Humans begin to interact w/ robots through restricted speech and gesture commands
• Autonomous vehicles require minimal supervision, and outperform the best pilots
• Robotic supply chain improves efficiency and surge response, and removes humans from danger
• Humans interact w/ robots as team-mates

Better Robots 8
Proposed Applications
Logistics: Packing Loading Transportation
Monitoring: Surveillance Patrol Observation
Application Demonstrations
Planning and Reasoning
UncertaintyDynamic worldScalePrediction
Perception and Awareness
VisionSpeechGestureLocalizationSurround awareness
Communication and Coordination
TeamingCoordinated motion
Manipulation and Control
GraspingRolling, legged,flying mobility
Technical Areas
Better Robots 9
Backup slide w/ other CSAIL vehicles