bài tập lớn ltĐktĐ-tong 1
TRANSCRIPT

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 1

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 2
Yêu cầu: Khảo sát tính ổn định của hệ thống ban đầu
và tổng hợp hệ thống bám điện cơ dùng xenxin sử
dụng cơ cấu hiệu chỉnh nối tiếp.(phương án BTL số
27).
1. Ta có sơ đồ của hệ thống :
Trong đó :
- CCCT : Cơ cấu chương trình dùng để tạo tín hiệu vào
dưới dạng góc quay àov .
- HTXX: Hệ thống xenxin bao gồm xenxin phát (XX-P)
và xenxin thu ( XX-T ).
- KĐĐT: Khuếch đại điện tử.
- KĐMĐ: Khuếch đại máy điện.
- ĐCCH: Động cơ chấp hành điện 1 chiều.
- ĐT: Cơ cấu đổi tốc.
- ĐTĐC: Đối tượng điều chỉnh.

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 3
2. Các thông số cho trước của các phần tử trong hệ thống
trong bảng sau:
Tên
phần tử
HTXX KĐĐT KĐTĐ ĐCCH ĐT
Kí hiệu
các
thông
số và
thứ
nguyên
KXX
[v/độ]
KKĐĐT
[mA/v]
TKĐĐT
[sec]
KKĐMĐ
[v/mA]
TKĐMĐ
[sec]
KĐCCH
[độ/v]
TĐCCH
[sec]
KĐ=1/i
[độ/độ]
Giá trị 40 260 0,004 3,2 0,045 1,8 0,2 0,003
Tổng hợp hệ thống sử dụng cơ cấu hiệu chỉnh nối tiếp để
thỏa mãn các chỉ tiêu sau:
- Độ quá chỉnh : 26(%)axm
.
- Thời gian quá độ : 1.25(sec)d
tq
.
- Số dao động : 2n .
- Tốc độ bám cực đại : 18ax
Vm
.
- Sai số bám : 0.18V .

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 4
Bài làm:
I. Lập sơ đồ khối, sơ đồ chức năng , sơ đồ cấu trúc của hệ
thống và xác định hàm số truyền hệ thống ban đầu.
1. Lập sơ đồ khối.
KĐĐT ĐCCH ĐTKĐMĐ ĐTĐKHTXXCCCT
Nguyên lý làm vệc của hệ thống bám dùng xen- xin: Hệ thống xen-xin
dùng xen-xin phát (XX-P) và xen-xin thu (XX-T) làm việc ở chế độ biến
áp để đo sai lệch góc giữa trục phát và trục thu là àov ra
,
biến đổi thành điện áp ra của hệ thống xen-xin XXU , điện áp này được
đưa đến bộ khuếch đại điện tử (KĐĐT) ,ở đây tín hiệu được khuếch đại
sơ bộ, tạo thành dòng I điều khiển chạy trong cuộn dây điều khiển của
bộ khuếch đại máy điện (KĐMĐ). Bộ KĐMĐ có vai trò khuếch đại công
suất và tín hiệu ra là điện áp ( )U điều khiển động cơ chấp hành 1 chiều
(ĐCCH) làm việc. Động cơ chấp hành quay , qua hộp đổi tốc (ĐT), làm
đối tượng điều khiển (ĐTĐK) quay, đồng thời qua trục phản hồi cơ khí ,
rôto của XX-T cũng quay, làm cho góc sai lệch giảm dần. Quá trình điều
khiển chấm dứt khi ĐTĐK và rôto XX-T quay lên góc àora v , tức
là khi góc sai lệch góc 0 . Đó là chế độ làm việc khử sai lệch của
hệ thống. Chế độ này bảo đảm điều khiển góc quay của ĐTĐK ở 2 chiều
khác nhau (chiều quay thuận và chiều quay ngược kim đồng hồ).
Chế độ bám của hệ thống bám đồng bộ góc: Khi góc quay của rôto XX-P
(trục vào) ( )t liên tục thay đổi, thì do luôn có sai lệch góc , hệ

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 5
thống luôn làm việc, góc quay của ĐTĐK ra cũng thay đổi liên tục,
“bám” theo sự thay đổi của trục điều khiển àov .
2. Lập sơ đồ chức năng.
Đo
lường
và Biến
đổi
Khuếch
đại công
suất
Cơ cấu
chấp
hành
Khuếch
đại sơ bộ
Đổi
tốc
So
sánh
Cơ
cấu
phát
àov
ra
ra UXX
IU
Đối
tượng
điều
khiển
3. Lập sơ đồ cấu trúc.
Lượng vào àov , lượng ra ra ; qua cơ cấu so sánh cho ra sai số góc .
Cơ cấu đo lường và biến đổi của hệ thống xenxin biến áp là 1 khâu không
quán tính với lượng vào và lượng ra XXU thì có hàm số truyền:
( )W ( )
1 ( )XX
XX
U ss K
s
; (1)
Khuếch đại sơ bộ (Khuếch đại điện tử): lượng vào XXU và lượng ra I ; cơ
cấu này có hàm truyền:
DD
DD
( )W ( )
2 ( ) 1 .K T
XX K T
I s Ks
U s T s
; (2)
Khuếch đại công suất (Khuếch đại máy điện): lượng vào I và lượng ra
U ; cơ cấu có hàm truyền :
D( )W ( )
3 ( ) 1 .KDM
KDMD
I s Ks
U s T s
; (3)
Cơ cấu chấp hành: lượng vào U và lượng ra (góc quay của động cơ
chấp hành) cho ta hàm truyền:
( )W ( )4 ( ) .(1 . )
DCCH
DCCH
KU ss
s s T s
; (4)
Đổi tốc: lượng vào và lượng ra ra ; cho ta hàm truyền:

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 6
( )W ( )5 ( )
D
sras Ks
; (5)
Ta có sơ đồ cấu trúc sau:
XXK DD
DD1 .
K T
K T
K
T s 1 .
KDMD
KDMD
K
T s .(1 . )
DCCH
DCCH
K
s T s DK-
raàov
ra
XXU I U
4. Hàm số truyền của hệ thống ban đầu.
a) Hàm truyền hệ thống hở ban đầu.
1 2 3 4 5W ( ) W ( ).W ( ).W ( ).W ( ).W ( )
hbds s s s s s
DD
DD
. . . .
(1 . )(1 . )(1 . )XX K T KDMD DCCH D
K T KDMD DCCH
K K K K K
s T s T s T s
179,712
(1 0,004 )(1 0,045 )(1 0,2 )s s s s
; (*)
b) Hàm truyền hệ thống kín ban đầu.
WW ( )
1 Whbd
kbdhbd
s
179,712
179,712 (1 0,004 )(1 0,045 )(1 0,2 )s s s s
5 4 3 3 2
179,712
3,6.10 9,98.10 0,249 179,712s s s s

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 7
II. Khảo sát tính ổn định của hệ thống ban đầu.
1. Khảo sát tính ổn định của hệ thống hở ban đầu.
a) Khảo sát theo lý thuyết:
- Ta có đa thức đặc trưng của hệ thống hở:
( ) (0,004 1)(0,045 1)(0,2 1)hbd
D s s s s s
Phương trình đặc trưng : ( ) 0hbdD s có 4 nghiệm thực sau:
10;
0,004
1 1;
0,045 0,2
s s
s s
Hệ thống hở có 3 nghiệm nằm bên trái mặt phẳng nghiệm và 1 nghiệm
nằm trên trục ảo do vậy hệ thống hở ban đầu nằm ở biên giới ổn định.
b) Khảo sát dùng Control System Toolbox trên Matlab.
%Khai báo hàm truyền :
>> W1=40;
>> W2=tf(260,[0.004 1]);
>> W3=tf(3.2,[0.045 1]);
>> W4=tf(1.8,[0.2 1 0]);
>> W5=0.003;
>> Whbd=W1*W2*W3*W4*W5
Transfer function:
179.7
------------------------------------------
3.6e-005 s^4 + 0.00998 s^3 + 0.249 s^2 + s
% Vẽ đặc tính quá độ:
>> step(Whbd) %Đặc tính quá độ hệ thống hở

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 8
Đặc tính quá độ của hệ thống hở ban đầu.
Nhận xét: Đặc tính quá độ của hệ thống hở nhận được là đường thẳng
tuyến tính , tăng dần theo thời gian , do vậy hệ thống hở ban đầu này
nằm ở biên giới ổn định.
2. Khảo sát tính ổn định của hệ thống kín ban đầu.
a) Khảo sát hệ thống kín theo lý thuyết:
- Xét đa thức đặc trưng của hệ thống kín:
5 4 3 3 2( ) 3,6.10 9,98.10 0,249 179,712kbd
D s s s s s
Vậy ta có :
5 30 1
2 3 4
3,6.10 0; 9,98.10 0;
0,249 0; 1 0; 179,712 0
a a
a a a
Theo tiêu chẩn ổn định Hurwitz ta có các điều kiện ổn định sau:
Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 9
50
31 1
3,6.10 0;
9,98.10 0
a
a
31 3 3
2 50 2
9,98.10 12,45.10 0
3,6.10 0,249
a a
a a
1
3 3 2 10 4
0aa a
a a
3
3 3
5
9,98.10 02,45.10 9,98.10
3,6.10 179,712
0,01545 0
Kết luận: Hệ thống kín ban đầu không ổn định vì đã không thỏa mãn các
điều kiện ổn định của tiêu chuẩn Hurwitz.
b) Khảo sát hệ thống kín sử dụng Control System Toolbox trên Matlab:
%Khai báo hàm truyền và đặc tính quá độ hệ thống kín:
>> Wkbd=feedback(Whbd,1)
Transfer function:
179.7
--------------------------------------------------
3.6e-005 s^4 + 0.00998 s^3 + 0.249 s^2 + s + 179.7
>> step(Wkbd)

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 10
Đặc tính quá độ hệ thống kín ban đầu.
Nhận xét: Đặc tính không ổn định theo thời gian, do vậy hệ thống kín
ban đầu này không ổn định.
Kết luận chung phần khảo sát: Hệ thống hở nằm ở biên giới ổn định, hệ
thống kín không ổn định. Do vậy ta phải hiệu chỉnh hệ thống trên ổn định
theo đúng các chỉ tiêu chất lượng đề bài đã đặt ra.
Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 11
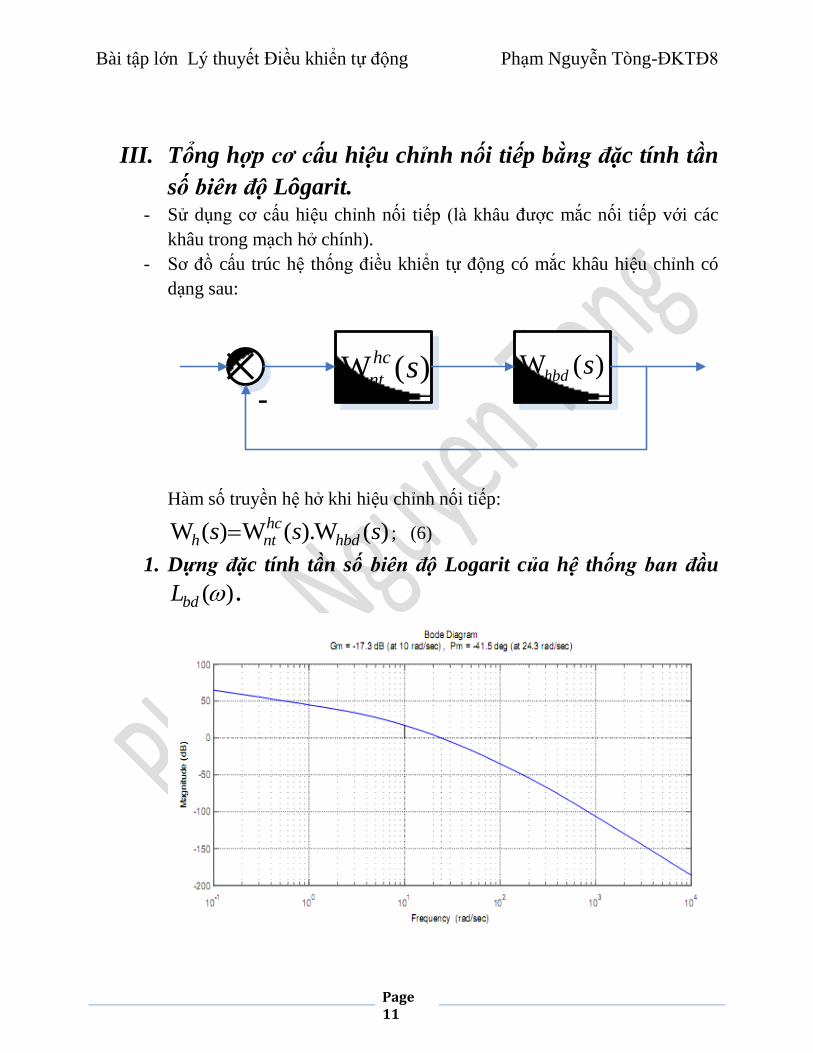
III. Tổng hợp cơ cấu hiệu chỉnh nối tiếp bằng đặc tính tần
số biên độ Lôgarit. - Sử dụng cơ cấu hiệu chỉnh nối tiếp (là khâu được mắc nối tiếp với các
khâu trong mạch hở chính).
- Sơ đồ cấu trúc hệ thống điều khiển tự động có mắc khâu hiệu chỉnh có
dạng sau:
-
W ( )hc
nt s W ( )hbd s
Hàm số truyền hệ hở khi hiệu chỉnh nối tiếp:
W ( ) W ( ).W ( )hch nt hbds s s ; (6)
1. Dựng đặc tính tần số biên độ Logarit của hệ thống ban đầu
( )bdL .

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 12
- Hệ thống hở ban đầu có tần số cắt 24,3( / )c rad s , hệ thống chấp
nhận sai số không đổi theo vận tốc. Do vậy, chọn đặc tính tần số biên độ
dạng 2
1.
2. Xây dựng đặc tính tần số biên độ Logarit mong muốn ( )mL s
theo các tiêu chuẩn chất lượng đặt ra cho hệ thống.
- Dựa vào các chỉ tiêu chất lượng cho trước, ta thực hiện tìm hàm truyền
hệ thống mong muốn và dựng đặc tính tần số biên độ Logarit của nó.
Tính toán mối liên hệ giữa các chỉ tiêu chất lượng của quá trình quá độ
với tần số cắt và độ dự trữ ổn định theo pha:
73 ( )c
; với tiêu chuẩn 26(%)axm
thì ta chọn ( ) 603
oc
;
;
22( 1)
( ) 0,522
2
bmm
c
bc
m
9 7 75,6( / )
1,25rad s
c tqd

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 13
2
2
2
. 0,52.5,61,456( / )
2 2
1 10,69( )
1,456
cm
m
m
brad s
T s
Ta có ax 18100
0,18m
m
VK
V
; chọn 110Km
21
. 5,6.1,4560,07( / )
110c m
mm
rad sK
;
1
114,3( )
0,07m
T s ;
Lại có: 3
3
2 2.5,621,54( )
2 0,52c c
mm
bs
b
;
33
1 10,046( )
21,54m
m
T s
;
Ở vùng tần số cao thì tính chất động học của hệ thống ban đầu và hệ
thống mong muốn không khác nhau là bao nhiêu. Do vậy ta chọn:
3
4 DD
0,045( )
0,004( )m KDMD
m K T
T T s
T T s
Ta nhận được hàm số truyền hệ thống hở mong muốn có đặc tính tần
số biên độ Logarit dạng 2/1:
22
1 3 4
.( 1)W ( )
( 1)( 1) ( 1)
m mhm
m m m
K T ss
s T s T s T s

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 14
2
110.(0,69 1)
(14,3 1)(0,045 1) (0,004 1)
s
s s s s
% Khai báo hàm truyền và vẽ đặc tính quá độ, đặc tính tần số Logarit
của hệ thống hở mong muốn:
>> Km=110;
>> W1m=tf(1,[1 0]);
>> W2m=tf([0.69 1],1);
>> W3m=tf(1,[14.3 1]);
>> W4m=tf(1,[0.002025 0.09 1]);
>> W5m=tf(1,[0.004 1]);
>> Whm=Km*W1m*W2m*W3m*W4m*W5m
Transfer function:
75.9 s + 110
-------------------------------------------------------
0.0001158 s^5 + 0.03411 s^4 + 1.347 s^3 + 14.39 s^2 + s
>> Wkm=feedback(Whm,1)
Transfer function:
75.9 s + 110
------------------------------------------------------------------
0.0001158 s^5 + 0.03411 s^4 + 1.347 s^3 + 14.39 s^2 + 76.9 s + 110
>> step(Wkm) %lấy đặc tính quá độ
>> margin(Whm) %lấy đặc tính tần số biên độ Logarit

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 15
Đặc tính quá động của hệ thống mong muốn.
- Độ quá chỉnh : 26(%) ;
- Thời gian quá độ: 1,2( )T sqd
;
- Số chu kì dao động : 1n ;
- Ổn định tới giá trị cuối cùng : 1h
.

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 16
Đặc tính tần số biên độ Logarit của hệ thống hở mong muốn.
- Độ dự trữ biên độ Logarit : 16( )L dB ;
- Độ dự trữ pha : 047,6 .
3. Xây dựng đặc tính tần số biên độ Logarit của khâu hiệu chỉnh
( ) ( ) ( )hcnt m bdL s L s L s .
Thực hiện phép trừ đồ thị ta nhận được đặc tính tần số Logarit của khâu
hiệu chỉnh, do vậy ta nhận được hàm số truyền của khâu hiệu chỉnh như
sau:
-20dB/dc +20dB/dc
L()
0
2
1
mT 1
1
bdT 2
1
bdT1
1
mT
0

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 17
2 DCCH
1
.( 1)( 1)W ( )
( 1)( 1)hc m
hcsm KDMD
K T s T ss
T T s
;
Với mhc
bd
KK
K ;
4.Chọn khâu hiệu chỉnh hiện thực hóa trong hệ thống.
Lưu ý: Chọn khâu hiệu chỉnh tương ứng phải đảm bảo đơn giản và khả
thi về mặt kĩ thuật:
Ta thực hiện hiệu chỉnh hóa thực tế bằng các khâu sau:
a) Khâu tích phân:
2tpR
tpC
1tpR
Có hàm số truyền là: 1
2
.( 1)W ( )
( 1)
tp tptp
tp
K T ss
T s
Với 1tpK
;
1 1 2. 0,69( )
tp tp tp mT R C T s
;
2
2 1 11
(1 ) 14,3( )tp
tp tp mtp
RT T T s
R
;

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 18
1
2
1
. 0,69
(1 ) 20,72
tp tp
tp
tp
R C
R
R
Giải hệ phương trình trên bằng cách chọn các linh kiện thực tế:
Chọn 110( )
tpR k
ta nhận được :
2210( ); 69( )
tp tpR k C F
Khi này ta nhận được các tham số thực tế của mạch tích phân:
2 10,69( ); 15,18( )
1 2m mT T s T T stp tp
b) Khâu vi phân:
2vpR
vpC
1vpR
3vpR
Ta có hàm số truyền của khâu vi phân này:
( 1)1
W ( ) .( 1)
2
T svp
s Kvp vp T s
vp
;
Với các tham số:

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 19
1 1100,61
179,7122 31
1 1
KmK
vp R R Kvp vp bd
R Rvp vp
;
.1 1
0,2( )vp vp vp DCCH
T R C T s ;
1 3
2 11 2 3
. 0,045( )vp vp
vp vp KDMDvp vp vp
R RT T T s
R R R
;
Vì 1
1 2 3
0,61vp
vpvp vp vp
RK
R R R
Nên 1
11 2 3
. 0,2.0,61 0,122 0,045vp
vpvp vp vp
RT
R R R
Do vậy ta cần phải tăng bdK ; cho tăng đến 650bd
K ;
Vậy ta có : 110
0,17650
mvp
bd
KK
K ;
1
11 2 3
. 0,2.0,17 0,034vp
vpvp vp vp
RT
R R R
3
11 2 3
. 0,045 0,034 0,011vp
vpvp vp vp
RT
R R R
;

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 20
1
1
1 2 3
3
1 2 3
. 0,2
0,17
0,055
vp vp
vp
vp vp vp
vp
vp vp vp
R C
R
R R R
R
R R R
Chọn 1 10( )vpR k ; ta nhận được các giá trị thực tế còn lại:
2 320( ); 47( ); 3,3( );
vp vp vpC F R k R k
Khi đó ta có các tham số thực tế của mạch vi phân:
1 20,2( ); 0,044( ); 0,166
vp vp vpT s T s K ;
5. Phân tích để kiểm tra chất lượng của hệ thống.
Hàm số truyền của khâu hiệu chỉnh chính là nối tiếp 2 khâu hiệu chỉnh
tích phân và vi phân ở trên:
Vì vậy ta có :
1 1
2 2
. .( 1)( 1)W ( ) W ( ).W ( )
( 1)( 1)
tp vp tp vphc tp vp
tp vp
K K T s T ss s s
T s T s
0,166.(0,69 1)(0,2 1)
(15,18 1)(0,044 1)
s s
s s
Ta nhận được hàm số truyền hệ thống hở khi đã hiệu chỉnh với
110650
0,166m
bdhc
KK
K

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 21
W ( ) W ( ).W ( )hch nt hbds s s
0,166.(0,69 1)(0,2 1) 650.
(15,18 1)(0,044 1) (1 0,004 )(1 0,045 )(1 0,2 )
s s
s s s s s s
110.(0,69 1)
(15,18 1)(0,044 1)(0,045 1)(0,004 1)
s
s s s s s
Khảo sát hệ thống này bằng Control System Toolbox trên Matlab:
>> K=110;
>> W1=tf([0.69 1],[1 0]);
>> W2=tf(1,[15.18 1]);
>> W3=tf(1,[0.045 1]);
>> W4=tf(1,[0.044 1]);
>> W5=tf(1,[0.004 1]);
>> Wh=K*W1*W2*W3*W4*W5
Transfer function:
75.9 s + 110
-------------------------------------------------------
0.0001202 s^5 + 0.03547 s^4 + 1.414 s^3 + 15.27 s^2 + s
>> Wk=feedback(Wh,1)

Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 22
Transfer function:
75.9 s + 110
------------------------------------------------------------------
0.0001202 s^5 + 0.03547 s^4 + 1.414 s^3 + 15.27 s^2 + 76.9 s + 110
>> step(Wk)
>> margin(Wh)
Đặc tính quá độ của hệ thống sau khi hiệu chỉnh.
- Độ quá chỉnh :26(%)
;
- Thời gian quá độ: 1,23( )T s
qd
.
- Hệ thống đã ổn định dao động với số chu kì 1n
.
Bài tập lớn Lý thuyết Điều khiển tự động Phạm Nguyễn Tòng-ĐKTĐ8
Page 23
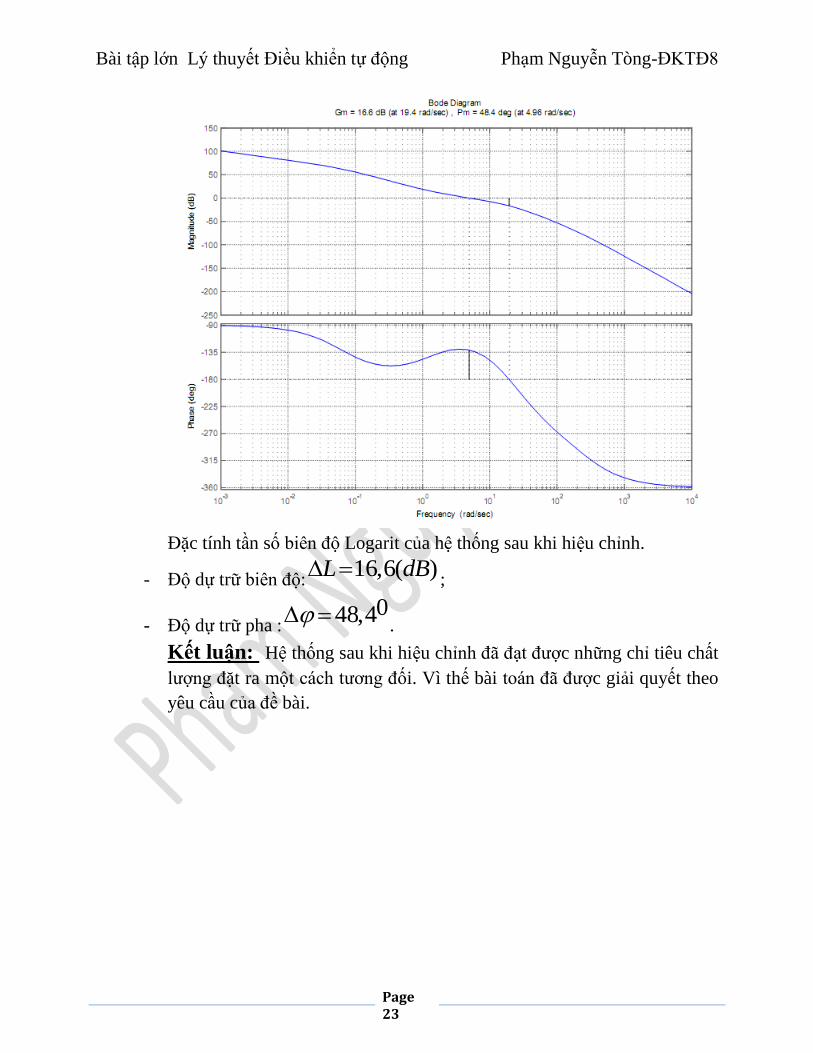
Đặc tính tần số biên độ Logarit của hệ thống sau khi hiệu chỉnh.
- Độ dự trữ biên độ:16,6( )L dB
;
- Độ dự trữ pha :048,4
.
Kết luận: Hệ thống sau khi hiệu chỉnh đã đạt được những chỉ tiêu chất
lượng đặt ra một cách tương đối. Vì thế bài toán đã được giải quyết theo
yêu cầu của đề bài.