auv dynamics presentation
TRANSCRIPT

09/27/12 [email protected] 1
AUV Dynamics
Autonomous Underwater Vehicle (AUV)Dynamics
Georgia Tech VIP Maritime RoboticsFall 2012
Kevin DeMarco



09/27/12 [email protected] 9
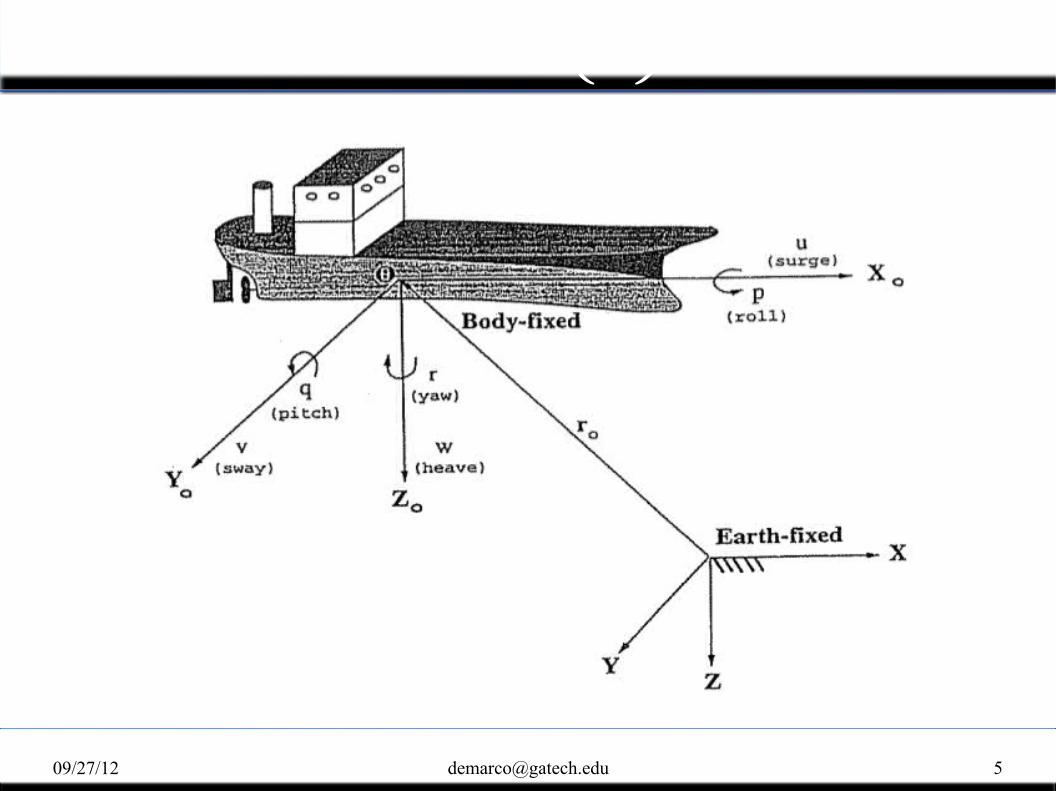
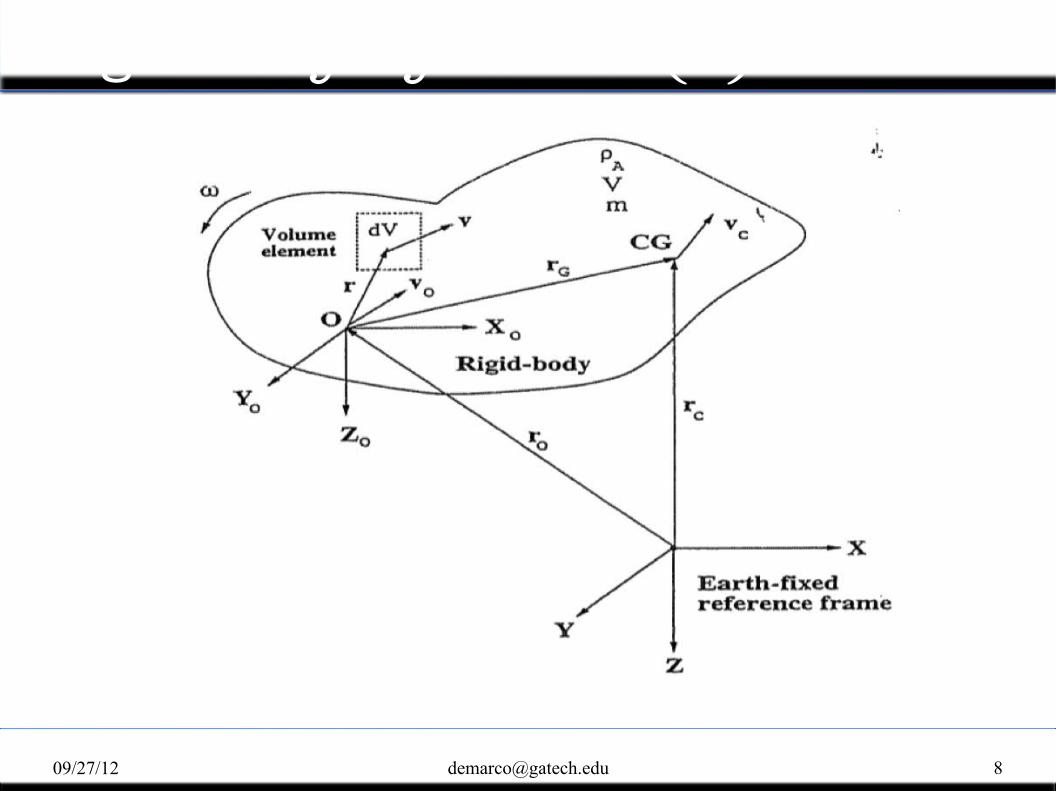
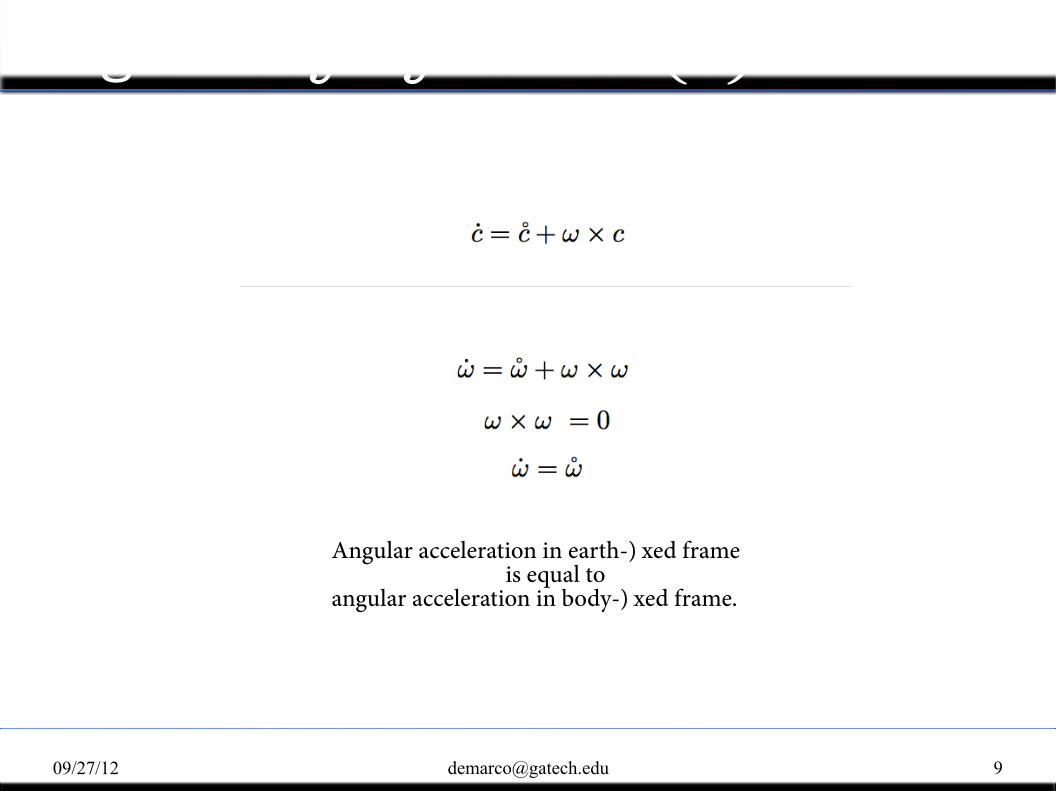
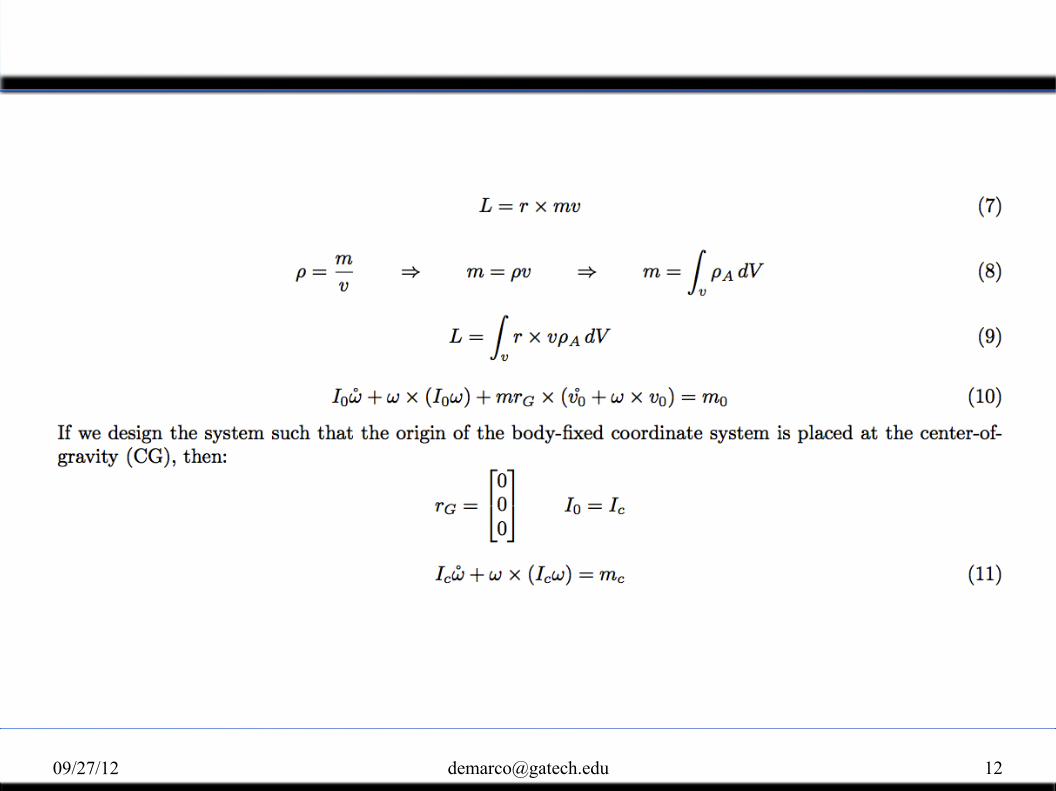
Rigid Body Dynamics (2)
Angular acceleration in earth-fixed frame is equal to
angular acceleration in body-fixed frame.



09/27/12 [email protected] 15
Hydrodynamic Forces & Moments
● Radiation Induced Forces– Added mass due to inertia of surrounding fluid– Radiation-induced potential damping due to energy
carried away by generated surface waves.– Restoring forces due to weight and buoyancy– Skin friction– Wave drift damping– Damping due to vortex shedding

09/27/12 [email protected] 16
Hydrodynamic Forces & Moments
● Environmental Forces:– Ocean currents– Waves– Wind
● Propulsion Forces:– Thrust / propeller forces– Control surfaces / rudder forces

09/27/12 [email protected] 17
Added Mass for AUV
Values can be found through strip theory, but most often are determined empirically in a tow tank.


09/27/12 [email protected] 20
Simulations
● In order to simulate our AUV we need:– Model of our vehicle– Initial state– Input vector (reference signal)– Controller (optional?!)– Ordinary Differential Equation (ODE) Solver
● Euler's Method● Improved Euler's Method● The Runge-Kutta Method

09/27/12 [email protected] 21
ODE Solvers● Ordinary Differential Equation (ODE) Solvers
– Usually use ODE solver options to set● ODE solver type● Max / min step sizes● Notify solver of stiffness of A matrix.
– Implementations:● Matlab
– ode45● Octave
– lsode● Scilab
– ode

09/27/12 [email protected] 22
Simulating Vehicle Dynamicst_init = 0;t_step = 0.1;t_final = 5000;
tt = t_init:t_step:t_final;
x0 = [0 ; 0 ; 0 ; 0 ; 0 ; 0 ; 0 ; 0 ; 0 ; 0 ; 0 ; 0 ; 0 ; 0 ; 0];yy = ode(x0, t_init, tt, auv_model);
Where auv_model is a function with prototype:
function [xdot] = auv_model(t,x)// // States: // 1: u : surge velocity// 2: v : sway velocity// 3: w : heave velocity// 4: p : roll rate// 5: q : pitch rate// 6: r : yaw rate// 7: xpos : earth x-pos// 8: ypos : earth y-pos// 9: zpos : earth z-pos// 10: phi : roll angle// 11: theta : pitch angle// 12: psi : yaw angle

09/27/12 [email protected] 23
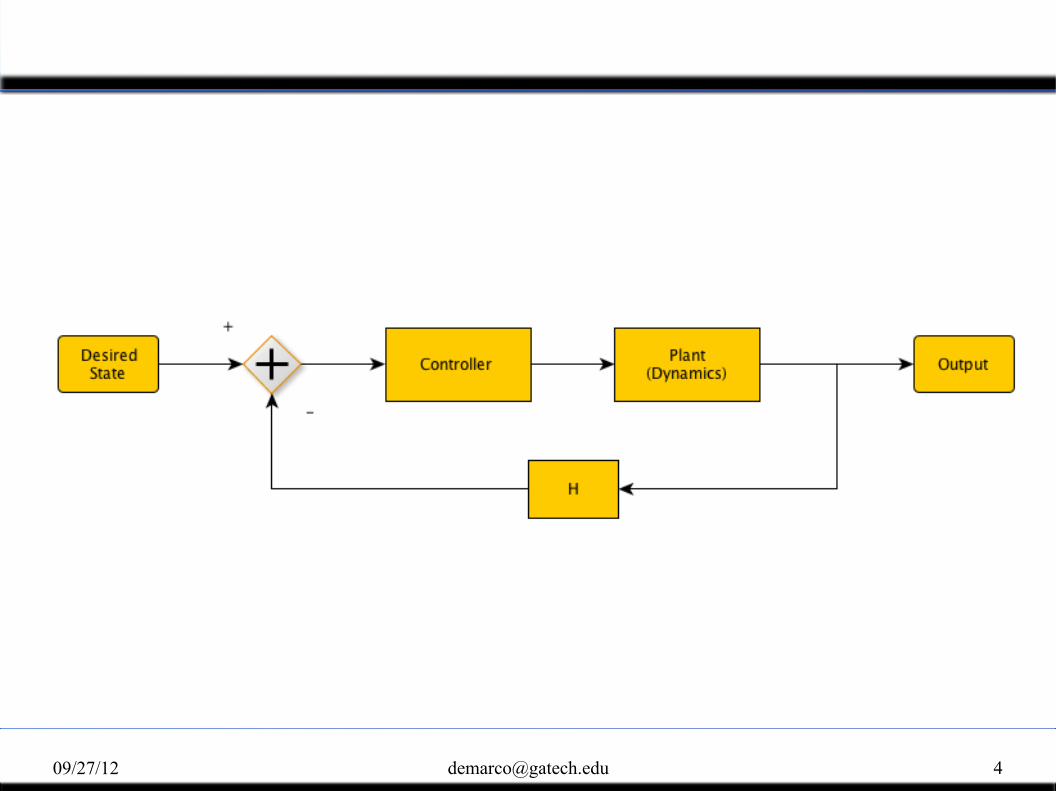
Control of AUV
● Types of control needed:– Speed control– Heading control– Depth control


09/27/12 [email protected] 25
Stability
● Controls-fixed stability– Fixed control surfaces and constant thrust
● Controls-free stability– Control surfaces and thrust allowed to vary
● Lyapunov methods (nonlinear) can be used to determine stability of system
● Open-loop stability● Closed-loop stability