autonomy: from deep space to inner space - ieee entity … · · 2012-01-0912 principal...
TRANSCRIPT

Funded by the David and Lucile Packard Foundation
Principal Researcher for Autonomy
Monterey Bay Aquarium Research Institute (MBARI)
Moss Landing, Californiahttp://www.mbari.org/autonomy/
Autonomy: From Deep Space to Inner Space
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Outline
Introduction
Issues in Ocean Observation
MBARI - brief intro
Scientific Motivation
Background - Autonomy & Legacy & Lessons
Partitioned Interleaved Planning and Execution (and state
Estimation)
Field Results
Next Steps - CANON
Friday, December 10, 2010

Collaborators
Frederic Py: Autonomy
Jnaneshwar Das: Adaptive Sampling/USC
Thom Maughan: Project Mgr and Sampling
John Ryan: Biological Oceanography
Julio Harvey: Molecular Ecology
Robert Vrijenhoek: Ecology
Gaurav Sukhatme: Robotics and Adaptive Sampling/USC
Maria Fox: Model Learning/Strathclyde
Angel Olaya: Adaptive Sampling/Madrid
Sergio Jiménez Celorrio: Learning/Madrid
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Most of the previous century could be called a “century of undersampling.”
Walter MunkSecretary of the Navy Research Chair in Oceanography, Scripps Institute of Oceanography,
UCSD
Testimony to The U.S. Commission On Ocean Policy, 18 April 2002
On Ocean Observation
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
In preparing for battle I have always found that plans are useless, but planning is indispensable.
&
Failing to plan is planning to fail.
General David Dwight G. Eisenhower, Supreme Commander Allied Forces, WWII and
34th President of the United States
On Planning
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
“We should…send machines and instruments out to sea, not people…”
David PackardMBARI Founder
Co-Founder Hewlett-Packard &
United States Under-Secretary of Defense, Reagan Administration
On Automation
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
“We should…send machines and instruments out to sea, not people…”
David PackardMBARI Founder
Co-Founder Hewlett-Packard &
United States Under-Secretary of Defense, Reagan Administration
On Automation
“““WWWWWWWWWWWWWWeeeeeeeeeeeeee ssssssshould…send mmmmmmmmaaaaaaaaaachines and inssssssssssssssttttttttttttttrrrrrrrrrrrrrruuuuuments out to sssssssseeeeeeeeeeeeeaaaaaaaaaaaaa, not people…………”
David PackardMBARI Founder
Co-Founder Hewlett-Packard &&&&&&&&&&&&&&&
United Stateeeeeeeeeeeeeessssssssssssss UUUUUUUUUUUUUUnddddddddddddddddeeeeeeeeeeeeeerrrrrrrrrrrrr-SSSSSSSSSSSSeeeeeeeeeeeeecccccccccccrrrrrrrrrrrrreeeeeeeeeeeetary of Defense, RRRRRRRRRRRRRRRReeeeeeeeeeeeeagggggannnnnnnnnnnnnn AAAAAAAAAAAAddddddddddddddddmmmmmmmmmmmmmiiiiiiiiiiiinnnnnnnnnniiiiiiiiiisssssssssssttttttttttrrrrrrrrrration
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Key Problems in Ocean Observing
• Tools and techniques are inadequate to understand dynamics of coastal ocean processes
�“We’ve been doing Oceanography the way Darwin did more than a 100 yrs ago. We need new tools and techniques to better characterize our environment, especially the oceans” Marcia McNutt, ex-MBARI President/CEO, now Dir. US Geological Survey/Science Advisor Sec. of Interior
• Often the phenomenon to be observed, cannot be sampled directly
� Use proxy variables (e.g Chl. Fluorescence, backscatter, temperature, salinity)
• Obtaining power & comms. in the water-column is difficult/non-existent
• Synthetic ocean models are poor predictors of change
• Persistence presence necessary to understand spatio-temporal variation
• Sub-sampling the large ocean is expensive and unsustainable
� Ship and labor costs are going up
� Large expeditions with multiple ships/crews are logistically difficult
� Oceanographers prefer “Terra firma”
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Why is Ocean Sciences interesting....now?
• Multi-disciplinary in nature–Physicists, Chemists, Mechanical, Civil, Electrical Engineering, Biological,
Physical, Chemical Oceanographers, Environmental Engineering, Computer Science, Economists, Numerical Analysts…
• At a cusp:–Realization that the Oceans are regulators for Global Climate processes
• Synoptic views, not point data can tell us how ocean processes actually work
–Realization of possible anthropogenic influences on our environment and the impact to the oceans
–Advances in sensors, platforms, robotics, control, AI are substantial over ~40 years
–Large science is slowly coming to the fore in Oceanography• E.g NSF funded $350 M Ocean Observatory Initiative (OOI)
–Global/Coastal/Regional Cabled Observatories proposed
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Does a domain matter?
T
Space• Power is not such a big deal (payload
scaling is the issue)
• Observability is by and large not such a big deal
• Communication is generally not a problem given observability
• Reachability is definitely an issue
• Launch costs are disproportionally high
• But space has substantial funding
• embedded in the public’s imagination
The Oceans• Power is a big deal; you have to carry
it with you
• Observability is fundamentally lacking
• Communication is a huge problem given lack of observability
• Reachability is not as much an issue given a support vessel
• Launch costs are disproportionally high
• Marine science/engineering has nowhere near as much resources
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
MBARI:Why is it unique?
• Privately funded
–By the David and Lucille Packard Foundation
–Dependence on Congress is minimal for for its operation
–By its charter < 25% of its internal budget for external (NSF, NASA, ONR) monies
• Long term view of Ocean Science and Engineering is strongly encouraged
• Strong applied technology focus for inter-disciplinary science
• Science, Engineering and Operations are in-house
• Scientists and engineers (mostly) free from undue management & budgetary interference
–MBARI’s influence in the Ocean sciences in the US is disproportionate to its size
• A strong desire to make an impact in Oceanographic sciences by sharing and collaborating with external entities
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
MBARI: What niche does it occupy?
OceanographyFor the most part
Pasteur’s Quadrant
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
~200 Staff• Science• Engineering• Operations• Outreach 12 Principal Scientists (Biology, Chemistry, Ecology,
Genetics, Sensors, Platforms, Autonomy)
Deep-dive ROVs, Test TankAUVs & shipsMoorings & buoys
Annual Budget ~$40M
Funded by the David & Lucille Packard Foundation
nggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggns
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
~200 Staff• Science• Engineering• Operations• Outreach 12 Principal Scientists (Biology, Chemistry, Ecology,
Genetics, Sensors, Platforms, Autonomy)
Deep-dive ROVs, Test TankAUVs & shipsMoorings & buoys
Annual Budget ~$40M
Funded by the David & Lucille Packard Foundation
ngggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggggns
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
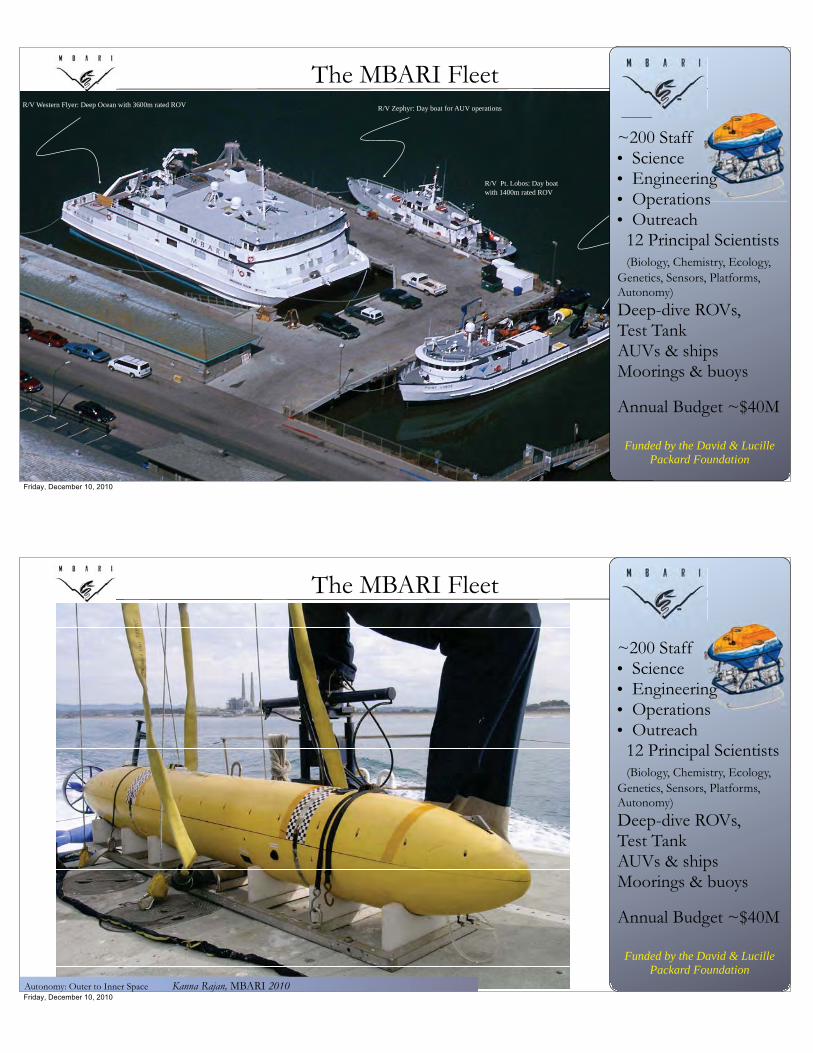
The MBARI Fleet
R/V Pt. Lobos: Day boat with 1400m rated ROV
R/V Western Flyer: Deep Ocean with 3600m rated ROV R/V Zephyr: Day boat for AUV operations
Funded by the David & Lucille Packard Foundation
~200 Staff• Science• Engineering• Operations• Outreach 12 Principal Scientists (Biology, Chemistry, Ecology,
Genetics, Sensors, Platforms, Autonomy)
Deep-dive ROVs, Test TankAUVs & shipsMoorings & buoys
Annual Budget ~$40M
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
The MBARI Fleet
Funded by the David & Lucille Packard Foundation
~200 Staff• Science• Engineering• Operations• Outreach 12 Principal Scientists (Biology, Chemistry, Ecology,
Genetics, Sensors, Platforms, Autonomy)
Deep-dive ROVs, Test TankAUVs & shipsMoorings & buoys
Annual Budget ~$40M
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
The MBARI Fleet
Funded by the David & Lucille Packard Foundation
~200 Staff• Science• Engineering• Operations• Outreach 12 Principal Scientists (Biology, Chemistry, Ecology,
Genetics, Sensors, Platforms, Autonomy)
Deep-dive ROVs, Test TankAUVs & shipsMoorings & buoys
Annual Budget ~$40M
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
The MBARI Fleet
Funded by the David & Lucille Packard Foundation
~200 Staff• Science• Engineering• Operations• Outreach 12 Principal Scientists (Biology, Chemistry, Ecology,
Genetics, Sensors, Platforms, Autonomy)
Deep-dive ROVs, Test TankAUVs & shipsMoorings & buoys
Annual Budget ~$40M
Friday, December 10, 2010

Kanna Rajan 2009
Cou
rtes
y C
hris
Sch
olin
, MBA
RI
And then the unique Platforms…:ESP
Friday, December 10, 2010
Kanna Rajan 2009
Cou
rtes
y C
hris
Sch
olin
, MBA
RI
And then the unique Platforms…:ESP
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Intermediate Nepheloid Layers (INLs)• Fluid sheets of suspended particulatessss. Originate from the sea floor
through diverse fluid dynamics [McPhee-Shaw 2004].
• Large Horizontal Scales (Kms)
• Small Vertical Scales (meters)
• Patchy
Focus of Interest: Event Response for Coast Ocean Processes
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Intermediate Nepheloid Layers (INLs)• Fluid sheets of suspended particulatessss. Originate from the sea floor
through diverse fluid dynamics [McPhee-Shaw 2004].
• Large Horizontal Scales (Kms)
• Small Vertical Scales (meters)
• Patchy
Focus of Interest: Event Response for Coast Ocean Processes
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Courtesy John Ryan, MBARI
Focus of Interest: Event Response for Coast Ocean Processes
Algal Blooms• Regular in episodic
appearance in coastal waters everywhere
• Some are harmful; toxins (Demoic acid) generated which cause significant impact to coastal economy and health� Econ. impact ~$75 M ’87-00*� Beach closures� Large mammal deaths� Human health impacts
* D. Anderson, P. Hoagland, Y. Kaoru, and A. White, “Economic impacts from harmful algal blooms
(HABs) in the United States,” tech. rep., Woods Hole Oceanographic Institution Technical Report: WHOI 2000-11, 2000.
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Technological Foci
• Adaptation of a mobile robotic asset in response to dynamic signals in the coastal ocean
• Large scale (interruptible) water-column surveys to target specific features of scientific interest
• To track advected patches of water with specific properties
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Technological Foci
• Adaptation of a mobile robotic asset in response to dynamic signals in the coastal ocean
• Large scale (interruptible) water-column surveys to target specific features of scientific interest
• To track advected patches of water with specific properties
Sense
Plan Act
World
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Distinction between Autonomy & Automation
• Autonomous Systems:
–Sense-Deliberate-Act cycle is intrinsic
–Machine-based decision making that results in behavior that is emblematic of human behavior
• Automation:
–Deliberation is not intrinsic
–Machine-based execution of activities which alleviates human work
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Distinction between Autonomy & Automation
• Autonomous Systems:
–Sense-Deliberate-Act cycle is intrinsic
–Machine-based decision making that results in behavior that is emblematic of human behavior
• Automation:
–Deliberation is not intrinsic
–Machine-based execution of activities which alleviates human work
…..is notautonomous
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Key Ingredients of an Autonomous System
• FDIR (Fault Diagnosis Isolation and Recovery)
• Deliberative Planning
• Plan Execution
DeliberativePlanning
Fault Diagnosis
CONTROLLED SYSTEM
EXECUTIVE
ThrustGoals
Attitude Point(b)
Engine Thrust (b, 200) Off
Delta_V(direction=b, magnitude=200)
Power
Warm Up
meets met_by
contained_by
contained_by
equals
Sensing Real World information
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
• Communication is not just a bottleneck; its damn difficult in the water-column!
• Powering instruments/platforms is a serious problem
• Costs effectiveness
– Costs associated with ship based science is increasingly prohibitive • Given funding profiles, autonomy is a strong leverage to squeeze more science out of existing
ocean observing systems
– Need for looking at the next generation of sampling and observation methods
– Platforms are more robust and increasingly capable
– Longer durations mission will need:• Goal-based commanding
• Opportunistic re-planning for adaptability
• Ability to reason about resources
• Onboard fault diagnosis, isolation and recovery (FDIR)
• Reduce the cognitive burden of mission operators
• And to do so efficiently (even at 3am in PIs time-zone)
Why is Autonomy important for the Ocean Sciences?
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
• Communication is not just a bottleneck; its damn difficult in the water-column!
• Powering instruments/platforms is a serious problem
• Costs effectiveness
– Costs associated with ship based science is increasingly prohibitive • Given funding profiles, autonomy is a strong leverage to squeeze more science out of existing
ocean observing systems
– Need for looking at the next generation of sampling and observation methods
– Platforms are more robust and increasingly capable
– Longer durations mission will need:• Goal-based commanding
• Opportunistic re-planning for adaptability
• Ability to reason about resources
• Onboard fault diagnosis, isolation and recovery (FDIR)
• Reduce the cognitive burden of mission operators
• And to do so efficiently (even at 3am in PIs time-zone)
Why is Autonomy important for the Ocean Sciences?
pabbbllleee
FFDDDDDDDDDDDDDDDDDDIIIIR)
rss
-zzzoooooooooooooonnnnnne)
The Sampling Conundrum1. Finite Time2. Finite Energy
3. Finite Sampling Resources
4. Uncertainty of occurrence of phenomenon
5. Uncertainty of location, size, shape and strength of feature signal
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
ROVs AUVs Gliders
Platforms: Ocean going Robots
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Intellectual/Operational Legacy of our work
Real-Time Execution
FlightH/WFault
MonitorsPlanning Experts (incl.
Navigation)
GroundSystem
RAX Manager
Mode ID and Reconfig
MissionManager
SmartExecutive
Planner/Scheduler
Remote Agent
ScienceActivities
ScienceSupport Tasks
Flight rules, science
constraints, and resource
constraints
EngineeringActivities
Science OperationsWorking Group
EngineeringTeam
Planner Activity Plan
SequenceGeneration
MAPGEN:Mixed-Initiative Planner
Mar
s Exp
lora
tion
Rov
ers (
MER
)
MAPGEN: Mixed-Initiative Activity Planning
– Jan 14th 2004 - ongoing
– Principal Investigator
Remote Agent Experiment (DS1)
– Flew onboard Deep Space 1, May
17-21, 1999
– 65 Million miles from Earth, during
Ballistic Cruise
– One of six principals
– NASA’s 1999 Software of the Year Rem
ote A
gent
on
Dee
p Sp
ace
One
(DS1
)
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Lessons Learned from Space Missions
• How (Lessons Learned from DS1 & MER)– Customer training and buy-in is not a luxury
– Requirements change and change often: learn to live with it
– Test what you fly and fly what you test
– Spiral mode of development often works well for model-based approaches to s/w engineering
– All or nothing approach = nothing
• Incremental use of automated approaches is necessary
• Solving an existing problem using a dumb but automated method; ++
• Migrate to more abstract/higher levels of autonomy but slowly.
– Usability issues should not be ignored
– Mission-critical software requires good systems engineering
• Connecting the pieces in the software puzzle
• Software not developed in isolation to its operating environment
– Work-practice ethnography is very useful
• How do people use tools and processes to get the ‘job done’?
DomainModel
ngggSearchEngine
SearchControl
AutonomyLevel
0 100
507525
Mars Exploration Rovers/Science Meeting
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Architectural relationships in the AUV domain
Mis
sion
Sop
his
tica
tion
TimeEarlyAUVs
TodaysAUVs
FutureAUVs
Todays Future
SequentialActivities
No in-situ adaptation - requires complex
programming
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Architectural relationships in the AUV domainM
issi
on S
oph
isti
cati
on
TimeEarlyAUVs
TodaysAUVs
FutureAUVs
Todays Future
SequentialActivities
No in-situ adaptation - requires complex
programming
Easy to build but no in-situadaptation - not scalable for
complex missions (a la Brooks’ Subsumption Architectures)
ReactiveArchitectures
lSequentialActivitiesSequential
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Architectural relationships in the AUV domain
Mis
sion
Sop
his
tica
tion
TimeEarlyAUVs
TodaysAUVs
FutureAUVs
Todays Future
SequentialActivities
No in-situ adaptation - requires complex
programming
DeliberativeApproaches
Goal-oriented, capable of re-planning and
adaptation - requires model infrastructure
Easy to build but no in-situadaptation - not scalable for
complex missions (a la Brooks’ Subsumption Architectures)
ReactiveArchitectures
lSequentialActivitiesSequential
Ap
ctive
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Architectural relationships in the AUV domainM
issi
on S
oph
isti
cati
on
TimeEarlyAUVs
TodaysAUVs
FutureAUVs
Todays Future
SequentialActivities
No in-situ adaptation - requires complex
programming
DeliberativeApproaches
Goal-oriented, capable of re-planning and
adaptation - requires model infrastructure
Easy to build but no in-situadaptation - not scalable for
complex missions (a la Brooks’ Subsumption Architectures)
ReactiveArchitectures
lSequentialActivitiesSequential
Ap
ctive
Distributed Control
High-level multi-level controladaptive sampling
in lossy comm. environments
berative
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
•Abstraction plays a significant role
• all computation on the robot is not equal
• all effort to generate a solution is not equal
• All entities can be seen as Sense/Plan/Act (SPA) loops
• Functional and temporal scope of computation can and should be exploited
• Partitioning computation should be a necessary and important driver for an agent architecture
• Deliberation and execution are intertwined :
• decision of one actor can be impacted by observations of another
Our Approach for Autonomy
Vehicle
Arm operatorPilot
Scientist
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Asset control (commands)
Navigation (where and how to go)N(
Science operation ( payload)
Mission (science objectives, and operational constraints)
Tem
poral Scop
e
go)o)goo)
Functional Scope
•Abstraction plays a significant role
• all computation on the robot is not equal
• all effort to generate a solution is not equal
• All entities can be seen as Sense/Plan/Act (SPA) loops
• Functional and temporal scope of computation can and should be exploited
• Partitioning computation should be a necessary and important driver for an agent architecture
• Deliberation and execution are intertwined :
• decision of one actor can be impacted by observations of another
Our Approach for Autonomy
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
T-REX: Teleo-Reactive EXecutive
•Abstraction plays a significant role
• all computation on the robot is not equal
• all effort to generate a solution is not equal
• All entities can be seen as Sense/Plan/Act (SPA) loops
• Functional and temporal scope of computation can and should be exploited
• Partitioning computation should be a necessary and important driver for an agent architecture
• Deliberation and execution are intertwined :
• decision of one actor can be impacted by observations of another
Our Approach for AutonomySense
Plan Act
World
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Partitioning Computation
• Functional scope along the lines of what
• Temporal scope along the lines of when
• What does partitioning buy us?
• “Divide and Conquer” in problem solving/Scalability
• Different search strategies can be encapsulated
• Incremental model development
• Allows targeted commanding at any level of abstraction
• For embedded real-world systems, robustness in failure
• Identical interfaces making software development easier
• Reactor contents are agnostic to the T-REX agent
T-REX
Agent
Iridium interface
Vehicle Control interface
Mission Manager
Skipper
NavigatorScience
Legend :Interface reactor
Planning reactor
Goal flow
Observation flow
Vehicle Functional LayerVehicle Functional LayyyyyyerV
Functional ScopeT
emp
oral Scope
look-ahead�=22hr
latency �=5mins
look-ahead �=5hrlatency �=2mins
look-ahead �=10seclatency �=1sec
look-ahead �=1hrlatency �=10sec
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Partitioning Computation
• Functional scope along the lines of what
• Temporal scope along the lines of when
• What does partitioning buy us?
• “Divide and Conquer” in problem solving/Scalability
• Different search strategies can be encapsulated
• Incremental model development
• Allows targeted commanding at any level of abstraction
• For embedded real-world systems, robustness in failure
• Identical interfaces making software development easier
• Reactor contents are agnostic to the T-REX agent
Sense
Plan Act
World
T-REX
Agent
Iridium interface
Vehicle Control interface
Mission Manager
Skipper
NavigatorScience
Legend :Interface reactor
Planning reactor
Goal flow
Observation flow
Vehicle Functional LayerVehicle Functional LayyyyyyerV
Functional Scope
Tem
poral Scop
e
look-ahead�=22hr
latency �=5mins
look-ahead �=5hrlatency �=2mins
look-ahead �=10seclatency �=1sec
look-ahead �=1hrlatency �=10sec
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
• constraints
• restrictions over the tokens behavior
• temporal or parametric
• Each reactor is composed of timelines:• Internal : represent the state of the world as viewed
by this reactor
• External : a view of a state variable Internal to another reactor
• for each External timeline there’s one and only one reactor that defines it as Internal
• timelines :• A sequence of tokens that describe the evolution of a
state variable
• tokens :• atomic entity describing a predicate that holds over a
temporal scope
• start, duration and end can be described as intervals (e.g. start=[0, 10])
Definitions
Friday, December 10, 2010
Mission Manager
Volume_Survey (x1,y1,xn,yn 10, 40) Goals
Path
Navigation
Command
Idle
Transect(Yo-Yo, Min=10, Max=40, x1,y1,xn,yn)
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
• constraints
• restrictions over the tokens behavior
• temporal or parametric
• Each reactor is composed of timelines:• Internal : represent the state of the world as viewed
by this reactor
• External : a view of a state variable Internal to another reactor
• for each External timeline there’s one and only one reactor that defines it as Internal
• timelines :• A sequence of tokens that describe the evolution of a
state variable
• tokens :• atomic entity describing a predicate that holds over a
temporal scope
• start, duration and end can be described as intervals (e.g. start=[0, 10])
Definitions
Friday, December 10, 2010

Volume_Survey (x1,y1,xn,yn 10, 40) Goals
Path
Navigation
Command
Idle
Transect(Yo-Yo, Min=10, Max=40, x1,y1,xn,yn)
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
• Tokens represent a flexible temporal extant
• Temporal flexibility allows plans to deal with
• “fail operational” modes
• uncertainty in plan execution
• use of Allen Algebra for all computation
• Plans are composed of logical assertions of tokens connected by explicit constraints on timelines
Definitions
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Inactive
Volume_Survey (x1,y1,xn,yn 10, 40)
Move_To(Recover) Move_To(Deploy)
Goals
Path
Navigation
Command
At_Surface
At(Start)
Idle
Transect(Straight, Depth=10)
Transect(Yo-Yo, Min=10, Max=40, x1,y1,xn,yn)
At_Surface
Transect(Straight, Depth=10)
Descend(10)
WayPoint(x1,y1)) Descend(40)
Ascend(10)
Ascend(10)
WayPoint(xn,yn))
Ascend(0)
contained_by
contained_by
met_bymet_by meets
contained_by[0,0][1,100]
Go(x1,y1) Go(xn,yn) Go(x2,y2,Yo-Yo)
• Tokens represent a flexible temporal extant
• Temporal flexibility allows plans to deal with
• “fail operational” modes
• uncertainty in plan execution
• use of Allen Algebra for all computation
• Plans are composed of logical assertions of tokens connected by explicit constraints on timelines
Definitions
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Inactive Surface Localization
meets meets
meet_by
50
Δd = [40, 50]
time
10 15 25 contains
Obtain GPS fix
• Tokens represent a flexible temporal extant
• Temporal flexibility allows plans to deal with
• “fail operational” modes
• uncertainty in plan execution
• use of Allen Algebra for all computation
• Plans are composed of logical assertions of tokens connected by explicit constraints on timelines
Definitions
Teleo-Reactive EXecutive(T-REX)
Functional Layer
eautive
EUROPAPlanner
OPAer
NDDLDomain Description
Language
Friday, December 10, 2010
Reactormodel
At(base)Move
10 120 [121 +inf]
Navigation
IdleMoveTo(x,y)
10 120 [121 +inf]
Commands
At(x,y)At(x',y')At(x",y")
118 119 120 [121 +inf]
Position
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
• Synchronization is the operation during which
a reactor identifies its current state
• merging observations with expectations
• computes the current value of its Internal
timelines
• The Internal state depends on External timelines
• Cannot synchronize unless the reactors it depends on are synchronized
Sensing : Synchronization
Friday, December 10, 2010

Reactormodel
At(base)Move
10 120 [121 +inf]
Navigation
IdleMoveTo(x,y)
10 120 [121 +inf]
Commands
At(x,y)At(x',y')At(x",y")
118 119 120 [121 +inf]
Position
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Mission Manager
Navigator
Science
Vehicle Control Interface
Skipper
Syn
ch o
rder
• Synchronization is the operation during which
a reactor identifies its current state
• merging observations with expectations
• computes the current value of its Internal
timelines
• The Internal state depends on External timelines
• Cannot synchronize unless the reactors it depends on are synchronized
Sensing : Synchronization
Friday, December 10, 2010
Reactormodel
At(base)Move
10 120 [121 +inf]
Navigation
IdleMoveTo(x,y)
10 120 [121 +inf]
Commands
At(x,y)At(x',y')At(x",y")
118 119 120 [121 +inf]
Position
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Mission Manager
Navigator
Science
Vehicle Control Interface
Skipper
Syn
ch o
rder
• Synchronization is the operation during which
a reactor identifies its current state
• merging observations with expectations
• computes the current value of its Internal
timelines
• The Internal state depends on External timelines
• Cannot synchronize unless the reactors it depends on are synchronized
• Role of the TREX agent:
• Order reactor synchronization based on their dependencies
• Propagate Internal state updates to the corresponding External timelines
Sensing : Synchronization
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Reactormodel
At(base)
120 [121 131]
Navigation
Idle
120 [121 131]
Commands
At(x,y)At(x',y')
119 120 121
Position
MoveooooooooMoMMMMMMMMMMMMMMM At(Loc1)
1 31131131]]]1 1
Move
[211 294] [294 +inf]
MoveTo(x,y)vevvvvvvvvoooooooooMoMMMMMMMMMMMMMMM
131]1
MoveTo(xloc, yloc) Idle
[211 294]
At(xloc,yloc)
[211 294]
...
• Deliberation is purely internal to the reactor
• find how to alter External states in order to be
in a desired Internal state
• 2 possible triggers for deliberation :
• a new goal on its Internal state
• External observations contradict reactor’s plan leading to plan repair/failure
• Each reactor defines two important parameters :
• latency � : maximum time required for producing a plan
• look-ahead � : how far ahead the reactor needs to look for deliberation
Plan/Deliberate
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Reactormodel
At(base)
120 [121 131]
Navigation
Idle
120 [121 131]
Commands
At(x,y)At(x',y')
119 120 121
Position
MoveoooooooooMoMMMMMMMMMMMMMMM At(Loc1)
1 131]1 1
Move
[211 294] [294 +inf]
MoveTo(x,y)vevevvvvvvvvvvooooooooMoMMMMMMMMMMMMMMM Idle
[211 294]
At(xloc,yloc)
[211 294]
...
� �
MoveTo(xloc, yloc)MoveTo(xloc, yloc)MoveTo(xloc, yloc)
• In order to execute its plan the reactor
should be able to request External timelines
to change according to its plan
• This dispatching can be done when a planned
state overlaps the planning window of the owner of this External state variable
• planning window = [�+�exec, �+�exec+�]
• �exec is the execution latency of a reactor including :
• reactor’s deliberation latency (�)
• and the maximum �exec of its External states
• A newly dispatched token becomes a goal of the owner of this External state (i.e. the
one declaring it as Internal)
Act : Dispatching
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Reactormodel
At(base)
120 [121 131]
Navigation
Idle
120 [121 131]
Commands
At(x,y)At(x',y')
119 120 121
Position
MoveoooooooooMoMMMMMMMMMMMMMMM At(Loc1)
1 131]1 1
Move
[211 294] [294 +inf]
MoveTo(x,y)vevevvvvvvvvvvooooooooMoMMMMMMMMMMMMMMM Idle
[211 294]
At(xloc,yloc)
[211 294]
...
� �
MoveTo(xloc, yloc)
MoveTo(xloc, yloc)
• In order to execute its plan the reactor
should be able to request External timelines
to change according to its plan
• This dispatching can be done when a planned
state overlaps the planning window of the owner of this External state variable
• planning window = [�+�exec, �+�exec+�]
• �exec is the execution latency of a reactor including :
• reactor’s deliberation latency (�)
• and the maximum �exec of its External states
• A newly dispatched token becomes a goal of the owner of this External state (i.e. the
one declaring it as Internal)
Act : Dispatching
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position
� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position
� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position pos(x)
Idle
At(X)
surf.
At(X)
Wait
� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position pos(x)
Idle
At(X)
surf.
At(X)
Wait
Go(west, north, Yo-Yo, ...)
Done
� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position pos(x)
Idle
At(X)
surf.
At(X)
Wait
Go(west, north, Yo-Yo, ...)
Done
At(north)At(east)
� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position pos(x)
Idle
At(X)
surf.
At(X)
Wait
Go(west, north, Yo-Yo, ...)
Done
At(north)At(east)
Going
Go(X, east, ...)
� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position pos(x)
Idle
At(X)
surf.
At(X)
Wait
Go(west, north, Yo-Yo, ...)
Done
At(north)At(east)
Going
Go(X, east, ...)
x'
� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position pos(x)
Idle
At(X)
surf.
At(X)
Wait
Go(west, north, Yo-Yo, ...)
Done
At(north)At(east)
Going
Go(X, east, ...)
x'
x'
� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position pos(x)
Idle
At(X)
surf.
At(X)
Wait
Go(west, north, Yo-Yo, ...)
Done
At(north)At(east)
Going
Go(X, east, ...)
x'
x'
� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position pos(x)
Idle
At(X)
surf.
At(X)
Wait
Go(west, north, Yo-Yo, ...)
Done
At(north)At(east)
Going
Go(X, east, ...)
x'
x'
plan horizon
Go(X, east, ...)
� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position pos(x)
Idle
At(X)
surf.
At(X)
Wait
Go(west, north, Yo-Yo, ...)
Done
At(north)At(east)
Going
Go(X, east, ...)
x'
x'
plan horizon
Go(X, east, ...)
descend waypoint
nav
� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position pos(x)
Idle
At(X)
surf.
At(X)
Wait
Go(west, north, Yo-Yo, ...)
Done
At(north)At(east)
Going
Go(X, east, ...)
x'
x'
plan horizon
Go(X, east, ...)
descend waypoint
nav
x''
x''
H
descend� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position pos(x)
Idle
At(X)
surf.
At(X)
Wait
Go(west, north, Yo-Yo, ...)
Done
At(north)At(east)
Going
Go(X, east, ...)
x'
x'
plan horizon
Go(X, east, ...)
descend waypoint
nav
x''
x''
H
descend
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position pos(x)
Idle
At(X)
surf.
At(X)
Wait
Go(west, north, Yo-Yo, ...)
Done
At(north)At(east)
Going
Go(X, east, ...)
x'
x'
Go(X, east, ...)
descend waypoint
nav
x''
x''
descendddededededededede
ddededededededede
� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
survey(west, north)
pos(x)
Idle
Mission
Manager
Navigator
Exec.
ScienceOp
Path
Path
check-in
Command
Position
Command
Position pos(x)
Idle
At(X)
surf.
At(X)
Wait
Go(west, north, Yo-Yo, ...)
Done
At(north)At(east)
Going
Go(X, east, ...)
x'
x'
Go(X, east, ...)
descend waypoint
nav
x''
x''
descendddedededededededede
ddededededededede
� = 1 s
� = 0 s
� = 5 s
� = 1 s
� = 22 hrs
� = 60 s
Illustration
• 3 reactors
• Mission Manager : select and order scientific goals to do in the mission
• Navigator : Waypoint based navigation control including operational constraints (surface every ~30mins for localization, ...)
• Executive : dispatch commands and collect data from the vehicle
Friday, December 10, 2010
“informal”description
Dataacquisition
ised
ctorsers in
ds of
rs
rk
Neighbourhood
Landscapby c
Lands
Sort cellhighest counneighbourhcell, where
inversely prRepeat unt
Clustering
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Nepheloid layer :suspended material
logs clusters
Nepheloidlayerdetected !
OnOOnnOnO bobobobob araraaa dddddclclasasassisisiiii ififififififififiififififififfffff rerrrrrererrrerrererereeeeeee
Feature(s)detection & sampling
• Need a generic way to identify features from sensor data in real-time
• Idea : learn a model from previous missions
• Technique : Use clustering to extract information from raw-data
Integrating HMM’s with Planning
Friday, December 10, 2010

Outside InsideTrigger
Sampler
c1 c2 cn...
.99 .98 .98
.01
.01
.01
.02
.26 0.02
.13 .05.01
.3.1 .05
Observations
States
StateTransition
Probabilities
ObservationProbabilities
.05
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Integrating HMM’s with Planning: Next Steps
Objective: To provide the context of the sequence of observations to enable state estimation
Friday, December 10, 2010
Outside InsideTrigger
Sampler
c1 c2 cn...
.99 .98 .98
.01
.01
.01
.02
.26 0.02
.13 .05.01
.3.1 .05
Observations
States
StateTransition
Probabilities
ObservationProbabilities
.05
Human Labeling
SOM Learning
Label Propagation
HMM Learning
Clusters
Phase I: Processing Raw Sensor Data
I. Partial Labeling II. Semi-supervised clustering
III. Cluster Extraction
....
C1
C2
C3
Cn
Outside
Boundary
Inside
Centroid
Raw Sensor Data
Phase II: Modeling Sensor Dynamics
I. Partial Labeling II. Semi-supervised clustering
III. Cluster Extraction
DataD
Phase II: Modeling Sensor Dynamics
V. Probabilistic Estimation
Raw Sensor aRaR w Sensor Saa
IV. Label Propagation
.....
O B I C
C1 C2 C3 Cn
HMM
SOM Clusters
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Integrating HMM’s with Planning: Next Steps
Objective: To provide the context of the sequence of observations to enable state estimation
F. Py, S. Celorrio, K. Rajan in review
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
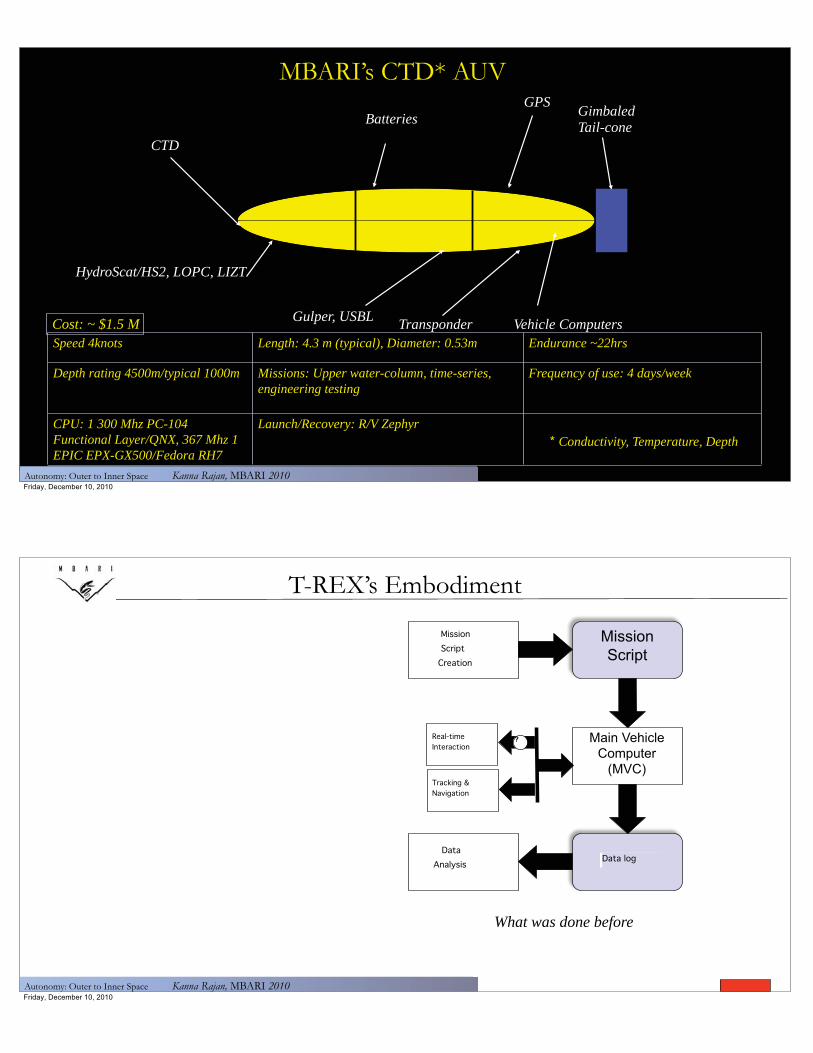
GimbaledTail-cone
CTD
Vehicle Computers
Batteries
Gulper, USBL Transponder
GPS
MBARI’s CTD* AUV
Speed 4knots Length: 4.3 m (typical), Diameter: 0.53m Endurance ~22hrs
Depth rating 4500m/typical 1000m Missions: Upper water-column, time-series, engineering testing
Frequency of use: 4 days/week
CPU: 1 300 Mhz PC-104 Functional Layer/QNX, 367 Mhz 1 EPIC EPX-GX500/Fedora RH7
Launch/Recovery: R/V Zephyr
Cost: ~ $1.5 M
HydroScat/HS2, LOPC, LIZT
* Conductivity, Temperature, Depth
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Mission
Script
Creation
Main VehicleComputer
(MVC)
Data
Analysis
MissionScript
Data log
Real-time
Interaction
Tracking &
Navigation
?
What was done before
T-REX’s Embodiment
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Main VehicleComputer
(MVC)
Data
Analysis
AdaptiveMission
Controller
Data log
Real-time
Interaction
Tracking &
Navigation
?
Adaptor
Adaptor
MissionScript
AdaptorAdaptor
What we can do now
T-REX’s Embodiment
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Gulper : water sampling device. Needs AUV adaptability Autonomy
computer stack
Basic AUV control stack
T-REX’s Embodiment
Friday, December 10, 2010

p(INL)
S1
S2
S3
S4
S5
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Results:Volume Surveys
INL mapping and sampling survey around M0
• Ability to detect in-situ INLs (Intermediate Nepheloid Layers)
• Reactively takes water sample when needed
• Change the resolution of the survey
• Mission duration up to 6 hours
• Average CPU load ~20% including execution control, planning and state estimation
Location: Off M0 Monterey Bay Nov 2009
Friday, December 10, 2010
p(INL)
S1
S2
S3
S4
S5
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Middle/High res. (500~250m)
Results:Volume Surveys
INL mapping and sampling survey around M0
• Ability to detect in-situ INLs (Intermediate Nepheloid Layers)
• Reactively takes water sample when needed
• Change the resolution of the survey
• Mission duration up to 6 hours
• Average CPU load ~20% including execution control, planning and state estimation
Location: Off M0 Monterey Bay Nov 2009
Friday, December 10, 2010

p(INL)
S1
S2
S3
S4
S5
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Middle/High res. (500~250m)
Low res. (~750m)
Results:Volume Surveys
INL mapping and sampling survey around M0
• Ability to detect in-situ INLs (Intermediate Nepheloid Layers)
• Reactively takes water sample when needed
• Change the resolution of the survey
• Mission duration up to 6 hours
• Average CPU load ~20% including execution control, planning and state estimation
Location: Off M0 Monterey Bay Nov 2009
Friday, December 10, 2010
p(INL)
S1
S2
S3
S4
S5
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Middle/High res. (500~250m)
Low res. (~750m)
samples taken nearby the strongest INL signature
Results:Volume Surveys
INL mapping and sampling survey around M0
• Ability to detect in-situ INLs (Intermediate Nepheloid Layers)
• Reactively takes water sample when needed
• Change the resolution of the survey
• Mission duration up to 6 hours
• Average CPU load ~20% including execution control, planning and state estimation
Location: Off M0 Monterey Bay Nov 2009
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
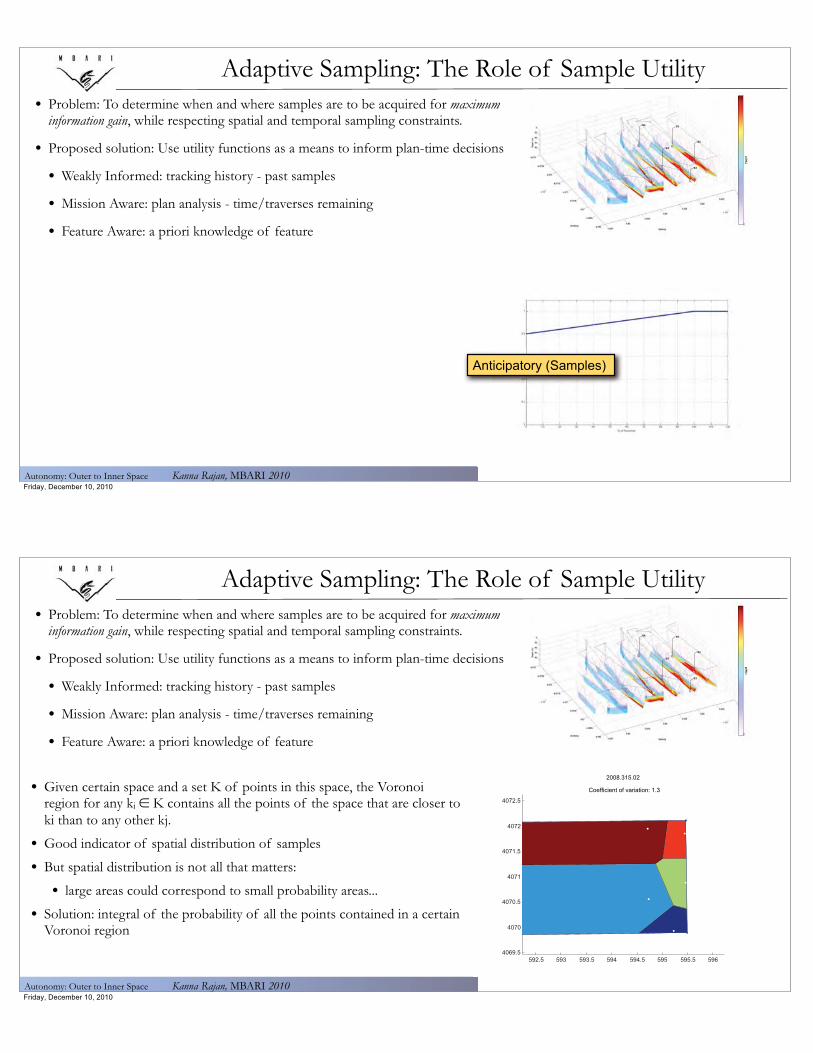
Adaptive Sampling: The Role of Sample Utilityp(IN
L)
S1
S2
S3
S4
S5
• Problem: To determine when and where samples are to be acquired for maximum information gain, while respecting spatial and temporal sampling constraints.
• Proposed solution: Use utility functions as a means to inform plan-time decisions
• Weakly Informed: tracking history - past samples
• Mission Aware: plan analysis - time/traverses remaining
• Feature Aware: a priori knowledge of feature
Purely Reactive
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Adaptive Sampling: The Role of Sample Utility
p(INL)
S1
S2
S3
S4
S5
• Problem: To determine when and where samples are to be acquired for maximum information gain, while respecting spatial and temporal sampling constraints.
• Proposed solution: Use utility functions as a means to inform plan-time decisions
• Weakly Informed: tracking history - past samples
• Mission Aware: plan analysis - time/traverses remaining
• Feature Aware: a priori knowledge of feature
Anticipatory (Distance)
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Adaptive Sampling: The Role of Sample Utilityp(IN
L)
S1
S2
S3
S4
S5
• Problem: To determine when and where samples are to be acquired for maximum information gain, while respecting spatial and temporal sampling constraints.
• Proposed solution: Use utility functions as a means to inform plan-time decisions
• Weakly Informed: tracking history - past samples
• Mission Aware: plan analysis - time/traverses remaining
• Feature Aware: a priori knowledge of feature
Anticipatory (Samples)
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Adaptive Sampling: The Role of Sample Utility
p(INL)
S1
S2
S3
S4
S5
• Problem: To determine when and where samples are to be acquired for maximum information gain, while respecting spatial and temporal sampling constraints.
• Proposed solution: Use utility functions as a means to inform plan-time decisions
• Weakly Informed: tracking history - past samples
• Mission Aware: plan analysis - time/traverses remaining
• Feature Aware: a priori knowledge of feature
• Given certain space and a set K of points in this space, the Voronoi region for any ki � K contains all the points of the space that are closer to ki than to any other kj.
• Good indicator of spatial distribution of samples
• But spatial distribution is not all that matters:
• large areas could correspond to small probability areas...
• Solution: integral of the probability of all the points contained in a certain Voronoi region
4069.5
4070
4070.5
4071
4071.5
4072
4072.5
592.5 593 593.5 594 594.5 595 595.5 596
2008.315.02
Coefficient of variation: 1.3
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Front identified
Data sent to shore continuously during transect
Results: Following Fronts
Location: Off M0 Monterey BayJuly 2009
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
PR2 control
European Space Agency rover testbed
• T-REX is a general purpose Open Source framework (in Google Code)
– Anything that can be described as Sense/Plan/Act can be integrated as a reactor
• T-REX is being used to coordinate multiple planners for advanced service robot control (http://www.willowgarage.com):
• T-REX will be the core controller for ESA rover testbed:– IP-CNR (Italy): APSI Planner
– LAAS (France) : GenoM functionnal layer
– Verimag (France) : BIP compositional Verification
Results: Other TREX Instantiations
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Next Steps: CANON- A Controlled, Agile and Novel Observing Network
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Next Steps: CANON- A Controlled, Agile and Novel Observing Network
• Mixed-Initiative control from shore/ship
• Loosely coupled multiple heterogenous vehicles
• Each vehicle has onboard plan synthesis capability
• Limited information exchange• Human as a separate ‘agent’
brings substantial cognitive capability
• Synoptic views are generated by the fusion of disparate map data, combined with onboard autonomy
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Decision Support System (DSS)
forCANON
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Decision Support System (DSS)
forCANON
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Decision Support System (DSS)
forCANON
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Decision Support System (DSS)
forCANON
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010Friday, December 10, 2010
595.5 596 596.5 597 597.5 598 598.5 599 599.5 600
4082
4082.5
4083
4083.5
4084
4084.5
4085
4085.5
4086
4086.5
Easting (km)
Nor
thin
g (k
m)
DrifterDorado 181Dorado 180
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
t0t1
t2t3
t4
r =Sdrifter
Sauv cos(pitchyoyo)
r =Sdrifter
1.5 cos([20, 30])=
Sdrifter
[1.30, 1.41]
d
r*d
P
IX
initial path
drifter displacementprojected path
−→IP = k.
−−−−−→Sdrifter
Next Steps: CANON- A Controlled, Agile and Novel Observing Network
Ch
l. F
luo
resc
ence
Oct
201
0
Friday, December 10, 2010

595.5 596 596.5 597 597.5 598 598.5 599 599.5 600
4082
4082.5
4083
4083.5
4084
4084.5
4085
4085.5
4086
4086.5
Easting (km)
Nor
thin
g (k
m)
DrifterDorado 181Dorado 180
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
t0t1
t2t3
t4
t0
t1
t2
t3
t4
r =Sdrifter
Sauv cos(pitchyoyo)
r =Sdrifter
1.5 cos([20, 30])=
Sdrifter
[1.30, 1.41]
dr*d
P
IX
initial path
drifter displacementprojected path
−→IP = k.
−−−−−→Sdrifter
Next Steps: CANON- A Controlled, Agile and Novel Observing Network
Ch
l. F
luo
resc
ence
Oct
201
0
Friday, December 10, 2010
595.5 596 596.5 597 597.5 598 598.5 599 599.5 600
4082
4082.5
4083
4083.5
4084
4084.5
4085
4085.5
4086
4086.5
Easting (km)
Nor
thin
g (k
m)
DrifterDorado 181Dorado 180
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
t0t1
t2t3
t4
t0
t1
t2
t3
t4
r =Sdrifter
Sauv cos(pitchyoyo)
r =Sdrifter
1.5 cos([20, 30])=
Sdrifter
[1.30, 1.41]
d
r*d
P
IX
initial path
drifter displacementprojected path
−→IP = k.
−−−−−→Sdrifter
Next Steps: CANON- A Controlled, Agile and Novel Observing Network
Ch
l. F
luo
resc
ence
Oct
201
0
Friday, December 10, 2010

595.5 596 596.5 597 597.5 598 598.5 599 599.5 600
4082
4082.5
4083
4083.5
4084
4084.5
4085
4085.5
4086
4086.5
Easting (km)
Nor
thin
g (k
m)
DrifterDorado 181Dorado 180
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
t0
t1
t2
t3
t4
r =Sdrifter
Sauv cos(pitchyoyo)
r =Sdrifter
1.5 cos([20, 30])=
Sdrifter
[1.30, 1.41]
dr*d
P
IX
initial path
drifter displacementprojected path
−→IP = k.
−−−−−→Sdrifter
Next Steps: CANON- A Controlled, Agile and Novel Observing Network
Ch
l. F
luo
resc
ence
Oct
201
0
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010Autonomy: Outer oooooooooooooooooooooooooooooooooooooooooooooooooto to InInIn InnInnInInnnInInIn InInInnnnnInInnInInInnnnInnInInIn In InInInIn In In InnInnInInInIn InInIn InInInInInIIIIIIIIIIIIIIIIIII ererererernenenennnnnnnnnnnnnnnnnnnnnnnnnnn SpSpppSpSpSppSpSpppppppSpSppppSppSpppSppppppppSpppppSpSpppppppppppppSppSpppppSpSpSpSppSppppSp SpSpSpSppp SpSpppppppppSpppSpSpp SpSSSSSSSSSSSSSSSSSSSSSS SSSSSSSSSSSS aceaceceeaceaceaceeaceeeeaceaceacacacacacacacacacaccacaccacccaaaaaaaaaaaaaaaa KaKaKaKaKaKaKaKaKaKaKaKaKaKaaaaaaKK nnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnn aaaaaaaaaaaaaaaaaa aaaaaRaaRaRaRaRaRaRaaRaRaRaRaaRaRaRaaaRaRaaaaRaRaRaRaRaaRaRaRaaaaaaRaRaaaaRaRaRaRaaaaRaaaaaaRaaRaaRaRRaRRRRRRRRRRRRRRRRRRRR jjajjajajajajajajaaaajajajajajajjajaaajajajajajajajajajajajajaajajajjajajajajajajajajajaajajajjaajajajajajjajajajajjaajjaajajajajjjjajajajajjjajajjajajajajjjjjjjjjjjjjjjjjjjjjj nn,n,n,nn,n,n,,,n,n,n,n,n,n,n,nnn,nn,n,nnnnnnnnnnnnnnnnnn BBMBBBBBBBMBMBBBMBBMBBBMBBMBBMBMBBBMBBMBMBBBBBBBBBBBBBBBBBBMBMBMBMBMBMBMBMBBMBMBBBBMBMBMBMBMBMMMMMMMMMMMM ARARARARARARARARARRARRRARARARRARRRRARRARRARRRRARARARARRRARARRRRARRARRRRARARARARARRARARRRARARARARRARRARRARRRRRARRRARRRRRRRRRRARARRARARRARARRRRARARARARARARRAARARARARARARAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA IIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIII 22222 22222 2 22222222222222222222222222222222222 11110101010101101011111101101011101110101101011101110111010100000000000000000000 000000000000000000000000000000000000000000000000000000000Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Composite of tracks of all CANON assetsfor sampling bloomsOct 9th - 22nd 2010
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
• The complex coastal ocean requires the ability to sample precisely
–Ocean models are imprecise and require substantial hand-holding
–Embodied robots with statistical models coupled to control add scientific value
• We have demonstrated a formal framework for partitioning a complex control problem into multiple Sense-Plan-Act control loops
• Strong execution semantics
• Each reactor becomes the executive of the reactors depending on its state
• Coupled state estimation allows modeling dynamic features in the coastal ocean
• Future directions:
• shore/ship side DSS
• experiment further system scalability/flexibility
• diverse solvers for deliberation
• multi-vehicle shore side control under limited (lossy) communications
Concluding Remarks
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
References
• J.Das, F. Py, , T. Maughan, J Ryan , K. Rajan & G. Sukhatme,, “Simultaneous Tracking and Sampling of Dynamic Oceanographic Features with Autonomous Underwater Vehicles and Lagrangian Drifters”, Accepted, Intnl. Symp. on Experimental Robotics (ISER), N. Delhi, India, Dec 2010.
• S. Jiménez, F. Py & K. Rajan, “Learning Identification Models for In-situ Sampling of Ocean features” Working notes of the RSS'10 Workshop on Active Learning for Robotics. Robotics Systems Sciences, Spain. 2010
• J. Das, K. Rajan, S. Frolov, J. Ryan, F. Py, D. Caron & G. Sukhatme, “Towards Marine Bloom Trajectory Prediction for AUV Mission Planning” ICRA, May 2010, Anchorage
• Ryan, J.P., Johnson, S., Sherman, A., Rajan, K., Py, F., Paduan, J., Vrijenhoek, R.,“Intermediate nepheloid layers as conduits of larval transport” Limnology & Oceanography: Methods, 2010.
• Py. F, K. Rajan, C. McGann “A Systematic Agent Framework for Situated Autonomous Systems”, AAMAS10, Toronto
• Rajan, K, Py, F, McGann, C., Ryan, J., O’Reilly, T., Maughan, T., Roman, B., “Onboard Adaptive Control of AUVs using Automated Planning and Execution”, Unmanned Underwater Systems Technology conference (UUST), New Hampshire, August 2009.
• McGann, C., Py, F., Rajan, K., Thomas, H. Henthorn, R., McEwen, R. “A Deliberative Architecture for AUV Control”, ICRA, Pasadena, 2008.
• McGann, C., Py, F., Rajan, K., Ryan, J. Henthorn, R. “Adaptive Control for Autonomous Underwater Vehicles”, AAAI, Chicago, 2008.
• McGann, C., Py, F., Rajan, K., Thomas, H. Henthorn, R., McEwen, R. “Preliminary Results for Model-Based Adaptive Control of an Autonomous Underwater Vehicle”, ISER, Athens, 2008.
• McGann, C., Py, F., Rajan, K., Thomas, H. Henthorn, R., McEwen, R. “Automated Decision Making For a New Class of AUV Science” Proc. American Society of Limnology and Oceanography, ASLO/Ocean Sciences, Orlando, 2008.
• Fox M., Long, D., Py, F., Rajan, K., Ryan, J. “In-situ Analysis for Intelligent Control” Proc. IEEE/OES OCEANS Conference, Aberdeen, Scotland, 2007.
• Bellingham, J, K. Rajan “Robotics in Remote and Hostile Environments” Science cover article, v318 Nov 2007.
• Web Site: http://www.mbari.org/autonomy/
g fdoooooooooooooooodooooooooooooooooooooo, 202020200020002000200202020200200200202020200020200000020000020000000020200000000202222222222222222222222222222222222222222222222222222222222 08000000000000000000000000000000000000000000000000000000 .
c. IEEIEEEEEEIEEEEEEEEEEIEEEEEEEEEEEEEEEEEEEEEEEEEEEEEEEEEEEEIEEEEEEEEEEEIEEEEEEEEEEEEEEEEEEEEIIIIIIIIIIIIIIIIIIIIIIIIIIIIIII EE/OES OCEANS Conferenc
clllle,e,,,,,,,,,,,,,,,,,,,,,,,,,,,,e,,,,,e,,,,,,,eeeeeeeeeeeeeeeeeeeeeeeee vvvvvvvvvvvvvvvvvvvvvvvvvvvvv 3131131311111311131113131311311131131313333333333333333333333333333333 8 8 8 8 8888888888888888888888888888888 NoNoNoNoNoNoooooNooNoNoNoNoNoNoNoNooooooNooooooNoooooNoooooooooNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNN v v v vvvvvvvvvvvvvvvvvvvv 2020202002002002000222222222222222222222222 00700000000000 .
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Backup Material
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
0
Goto(W2) Surface(W2) Goto(W3) Terminate(W3)
0 120 220 260 480 500
Program P
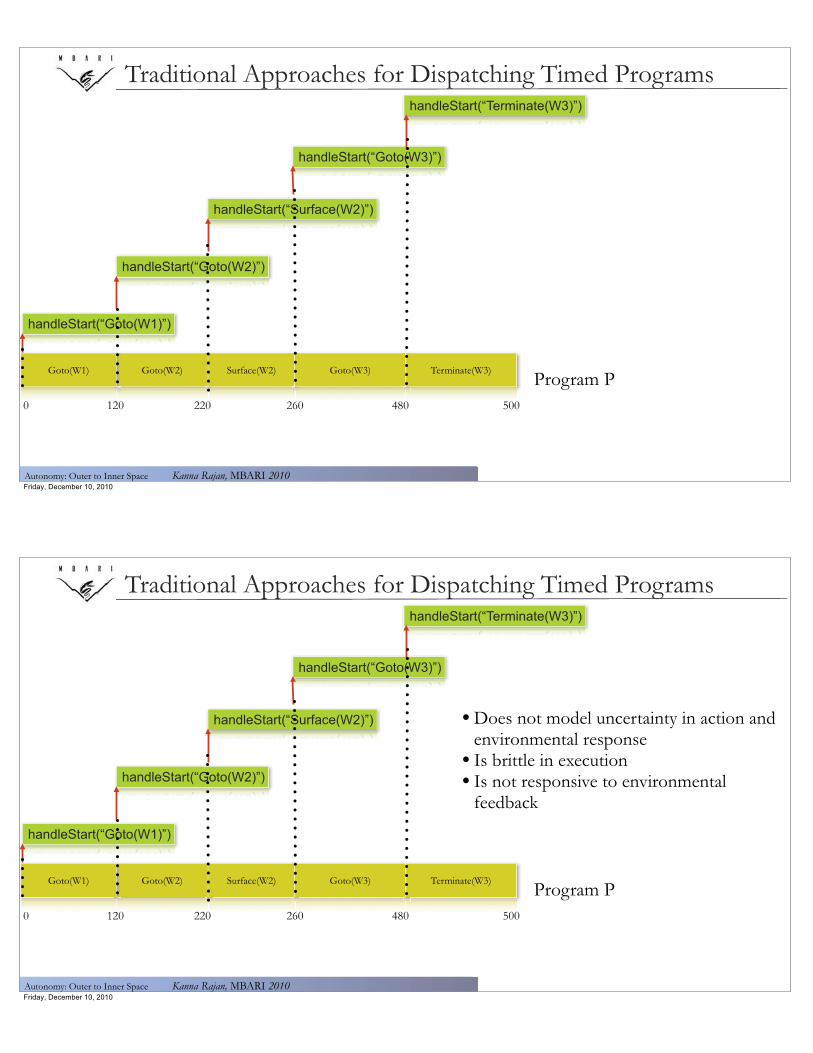
Traditional Approaches for Dispatching Timed Programs
00000 1222
Goto(W1)
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
0
Goto(W2) Surface(W2) Goto(W3) Terminate(W3)
0 120 220 260 480 500
Program P
Traditional Approaches for Dispatching Timed Programs
00000 1222
Goto(W1)
handleStart(“Goto(W1)”)
handleStart(“Goto(W2)”)
handleStart(“Surface(W2)”)
handleStart(“Goto(W3)”)
handleStart(“Terminate(W3)”)
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
0
Goto(W2) Surface(W2) Goto(W3) Terminate(W3)
0 120 220 260 480 500
Program P
Traditional Approaches for Dispatching Timed Programs
00000 1222
Goto(W1)
• Does not model uncertainty in action and environmental response
• Is brittle in execution• Is not responsive to environmental
feedback
handleStart(“Goto(W1)”)
handleStart(“Goto(W2)”)
handleStart(“Surface(W2)”)
handleStart(“Goto(W3)”)
handleStart(“Terminate(W3)”)
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
0
Goto(W2) Surface(W2) Goto(W3) Terminate(W3)
[0, 5] [110, 120] [220,225] [260,290] [480, 520] [500, 600]
Program P
A less Traditional Approach of Dispatching Timed Programs
00[0 5]00 [11000
Goto(W1)
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
0
Goto(W2) Surface(W2) Goto(W3) Terminate(W3)
[0, 5] [110, 120] [220,225] [260,290] [480, 520] [500, 600]
Program P
A less Traditional Approach of Dispatching Timed Programs
000[0 55]00 [11000
Goto(W1)
handleStart(“Goto(W2)”)
handleStart(“Surface(W2)”)
handleStart(“Goto(W3)”)
handleStart(“Terminate(W3)”)
handleStart(“Goto(W1)”)
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
0
Goto(W2) Surface(W2) Goto(W3) Terminate(W3)
[0, 5] [110, 120] [220,225] [260,290] [480, 520] [500, 600]
Program P
A less Traditional Approach of Dispatching Timed Programs
00[0 5]00 [11000
Goto(W1)
• Flexible start/end times can deal with some measure of uncertainty
• Can be robust to fail-operational modes of recoveryhandleStart(“Goto(W2)”)
handleStart(“Surface(W2)”)
handleStart(“Goto(W3)”)
handleStart(“Terminate(W3)”)
handleStart(“Goto(W1)”)
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
What is Constraint-Based Planning?• CBP systematizes the use of
– relationships (real or implied)
– provides a sound mathematical framework for representing axiomatic equations
– encapsulates a systematic approach to evolving state
• State-Variable based approaches further decompose the planning problem
– timelines describe state evolution for pre-specified sub-systems
– by merging the representations of time with state-variables we can use systematic representations to depict state evolution realistically while still being discrete
• The essential elements of timeline based CBP are:
– state variables: describe evolution of state or a single thread of execution in a concurrent system
– tokens: describes a procedure which instantiates and maintains state
– timepoints: instances of time when a significant change in state is likely to occur
– constraints: explicit representation of relationships between entities within and across timelines
Friday, December 10, 2010

50
time 10 45 60
Waypoint_Yo-Yo
State Variable Token
TimepointsAutonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
What is Constraint-Based Planning?• CBP systematizes the use of
– relationships (real or implied)
– provides a sound mathematical framework for representing axiomatic equations
– encapsulates a systematic approach to evolving state
• State-Variable based approaches further decompose the planning problem
– timelines describe state evolution for pre-specified sub-systems
– by merging the representations of time with state-variables we can use systematic representations to depict state evolution realistically while still being discrete
• The essential elements of timeline based CBP are:
– state variables: describe evolution of state or a single thread of execution in a concurrent system
– tokens: describes a procedure which instantiates and maintains state
– timepoints: instances of time when a significant change in state is likely to occur
– constraints: explicit representation of relationships between entities within and across timelines
Friday, December 10, 2010
Waypoint
Waypoint
meets meets
meet_by
50
time 10 45 60
Waypoint
Δd = [40, 50]
Waypoint_Yo-Yo (?threshold)
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
What is Constraint-Based Planning?• CBP systematizes the use of
– relationships (real or implied)
– provides a sound mathematical framework for representing axiomatic equations
– encapsulates a systematic approach to evolving state
• State-Variable based approaches further decompose the planning problem
– timelines describe state evolution for pre-specified sub-systems
– by merging the representations of time with state-variables we can use systematic representations to depict state evolution realistically while still being discrete
• The essential elements of timeline based CBP are:
– state variables: describe evolution of state or a single thread of execution in a concurrent system
– tokens: describes a procedure which instantiates and maintains state
– timepoints: instances of time when a significant change in state is likely to occur
– constraints: explicit representation of relationships between entities within and across timelines
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
X =[10 20] Y=[30 100]
[30 38]
X=[10 20] Y=[30 100]
38
-30
STN
Distance Graph
CONVERSION: Y-X � [30 38] � Y-X <= 38 ^ X-Y <= -30
Origin={0}
20 -10 -30 100
Upper Bound on Path Length: 20 + 38 -30 = 28
�Fast Incremental Propagation�Detect Inconsistency with a negative cycle�Backtrack free search if there is a feasible solution
Foundational Representation: Simple Temporal Networks
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
X =[10 20] Y=[30 100]
[30 38]
X=[10 20] Y=[30 100]
38
-30
STN
Distance Graph
CONVERSION: Y-X � [30 38] � Y-X <= 38 ^ X-Y <= -30
Origin={0}
20 -10 -30 100
Upper Bound on Path Length: 20 + 38 -30 = 28
�Fast Incremental Propagation�Detect Inconsistency with a negative cycle�Backtrack free search if there is a feasible solution
Foundational Representation: Simple Temporal Networks
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
How does one build Timelines?
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Waypoint(Depth, Heading)
Wait_At_Surface
Waypoint_Yo-Yo(Min_Depth, Max_Depth, Heading)
[0, 1800]
meets
[0,∞]
[0,∞]
I
How does one build Timelines?
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Waypoint(Depth, Heading)
Wait_At_Surface
Waypoint_Yo-Yo(Min_Depth, Max_Depth, Heading)
[0, 1800]
meets
[0,∞]
[0,∞]
I
How does one build Timelines?
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Waypoint(Depth, Heading)
Wait_At_Surface
Waypoint_Yo-Yo(Min_Depth, Max_Depth, Heading)
[0, 1800]
meets
[0,∞]
[0,∞]
I
Waypoint(Depth, Heading)
Wait_At_Surface
Waypoint_Yo-Yo(Min_Depth, Max_Depth, Heading)
[0, 1800]
meets
[0,∞]
[0,∞]
II
How does one build Timelines?
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Waypoint(Depth, Heading)
Wait_At_Surface
Waypoint_Yo-Yo(Min_Depth, Max_Depth, Heading)
[0, 1800]
meets
[0,∞]
[0,∞]
I
Waypoint(Depth, Heading)
Wait_At_Surface
Waypoint_Yo-Yo(Min_Depth, Max_Depth, Heading)
[0, 1800]
meets
[0,∞]
[0,∞]
II
Waypoint(Depth, Heading)
Wait_At_Surface
Waypoint_Yo-Yo(Min_Depth,
Max_Depth, Heading)
[0, 1800]
meets
[0,∞][0,∞]
III
How does one build Timelines?
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Waypoint(Depth, Heading)
Wait_At_Surface
Waypoint_Yo-Yo(Min_Depth, Max_Depth, Heading)
[0, 1800]
meets
[0,∞]
[0,∞]
I
Waypoint(Depth, Heading)
Wait_At_Surface
Waypoint_Yo-Yo(Min_Depth, Max_Depth, Heading)
[0, 1800]
meets
[0,∞]
[0,∞]
II
Waypoint(Depth, Heading)
Wait_At_Surface
Waypoint_Yo-Yo(Min_Depth,
Max_Depth, Heading)
[0, 1800]
meets
[0,∞][0,∞]
III
How does one build Timelines?
Waypoint_Yo-Yo(Min_Depth, Max_Depth, Heading)
meets meets
meet_by time
Waypoint(Depth, Heading)
Wait_At_Surface
meet_by
IV
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Plan Formulation Example (NASA’s Deep Space 1)
Max_ThrustIdle IdleTimer
Accumulation
SEP Action
SEP_Segment
Th_Seg
Standby
Th_Sega Th_Seg Th_SegIdle_Seg Idle_Seg
Thr_Boundary
Th_SegTh_Seg
Op_NAV_Window
No_Accum
contained_by
Final_Accum
ends
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Max_ThrustIdle IdleTimer
Accumulation
SEP Action
SEP_Segment
Th_Seg
Standby
Th_Sega Th_Seg Th_SegIdle_Seg Idle_Seg
Thr_Boundary
Th_SegTh_Seg
Accumulate
meets
Op_NAV_Window
No_Accum
contained_by
Final_Accum
ends
Plan Formulation Example (NASA’s Deep Space 1)
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Max_ThrustIdle IdleTimer
Accumulation
SEP Action
SEP_Segment
Thrust_Segment
Standby
Idle_Seg Idle_Seg
Thr_Boundary Accumulate
meets
Final_Accum
ends
Op_NAV_Window
No_Accum
contained_by
Starting_up
Plan Formulation Example (NASA’s Deep Space 1)
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Max_ThrustIdle IdleTimer
Accumulation
SEP Action
SEP_Segment
Thrust_Segment
Standby
Idle_Seg Idle_Seg
Thr_Boundary Accumulate
meets
Final_Accum
ends
contained_by
Op_NAV_Window
No_Accum
contained_by
Starting_up
Plan Formulation Example (NASA’s Deep Space 1)
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Max_ThrustIdle IdleTimer
Accumulation
SEP Action
SEP_Segment
Thrust_Segment
Standby
Idle_Seg Idle_Seg
Thr_Boundary Accumulate
meets
Final_Accum
ends
contained_by
Thrusting
equal
Op_NAV_Window
No_Accum
contained_by
Starting_up
Plan Formulation Example (NASA’s Deep Space 1)
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Max_ThrustIdle IdleTimer
Accumulation
SEP Action
SEP_Segment
Thrust_Segment
Standby
Idle_Seg Idle_Seg
Thr_Boundary Accumulate
meets
Final_Accum
ends
contained_by
after
Starting_Up
Thrusting
equal
contained_by
met_by
Pointing
contained_by Op_NAV_Window
No_Accum
contained_by
Plan Formulation Example (NASA’s Deep Space 1)
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
Max_ThrustIdle Idle
Poke
Timer
Attitude
Accumulation
SEP Action
SEP_Segment
Th_Seg
contained_by
equals equalsmeets
meets
contained_by
Start_Up Start_UpShut_Down Shut_Down
Thr_Boundary
Thrust ThrustThrustThrustStandby Standby Standby
Th_Sega Th_Seg Th_SegIdle_Seg Idle_Seg
Accum_NO_Thr Accum_ThrAccum_Thr Accum_ThrThr_Boundary
contained_by
CP(Ips_Tvc) CP(Ips_Tvc) CP(Ips_Tvc)
contained_by
Th_SegTh_Seg
Plan Formulation Example (NASA’s Deep Space 1)
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
What about modeling?
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
class Front extends AgentTimeline { predicate None {}
predicate Info { float temperature; DEPTH depth; DEPTH mapDepth; eq(duration, 1); }
predicate Begin {}
predicate Search { float temperature; DEPTH depth; NORTHING xTo; EASTING yTo; bool frontDetected; NORTHING xFront; EASTING yFront; } predicate Map { NORTHING xFront; EASTING yFront; float gulpSeparation; } }
What about modeling?
Front::Map { float distanceToFrom, distanceToTo; bool closeToFrom, closeToTo; float x1, y1, x2, y2;
contained_by(FrontTracker.Track trk);
calcDistance(distanceToFrom, trk.xFrom, trk.yFrom, xFront, yFron testLEQ(closeToFrom, distanceToFrom, trk.moveIncrement); calcDistance(distanceToTo, trk.xTo, trk.yTo, xFront, yFront); testLEQ(closeToTo, distanceToTo, trk.moveIncrement);
if( closeToFrom==false ) { float ratioFrom, dxToFrom, dyToFrom, dx2, dy2; addEq(trk.xFrom, dxToFrom, xFront); addEq(trk.yFrom, dyToFrom, yFront); addEq(x2, dx2, xFront); addEq(y2, dy2, yFront); mulEq(trk.moveIncrement, ratioFrom, distanceToFrom); mulEq(dx2, ratioFrom, dxToFrom); mulEq(dy2, ratioFrom, dyToFrom); } if( closeToFrom==true ) { eq(x2, trk.xFrom); eq(y2, trk.yFrom); }..............
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
class Front extends AgentTimeline { predicate None {}
predicate Info { float temperature; DEPTH depth; DEPTH mapDepth; eq(duration, 1); }
predicate Begin {}
predicate Search { float temperature; DEPTH depth; NORTHING xTo; EASTING yTo; bool frontDetected; NORTHING xFront; EASTING yFront; } predicate Map { NORTHING xFront; EASTING yFront; float gulpSeparation; } }
Allen Algebra*
What about modeling?
Front::Map { float distanceToFrom, distanceToTo; bool closeToFrom, closeToTo; float x1, y1, x2, y2;
contained_by(FrontTracker.Track trk);
calcDistance(distanceToFrom, trk.xFrom, trk.yFrom, xFront, yFron testLEQ(closeToFrom, distanceToFrom, trk.moveIncrement); calcDistance(distanceToTo, trk.xTo, trk.yTo, xFront, yFront); testLEQ(closeToTo, distanceToTo, trk.moveIncrement);
if( closeToFrom==false ) { float ratioFrom, dxToFrom, dyToFrom, dx2, dy2; addEq(trk.xFrom, dxToFrom, xFront); addEq(trk.yFrom, dyToFrom, yFront); addEq(x2, dx2, xFront); addEq(y2, dy2, yFront); mulEq(trk.moveIncrement, ratioFrom, distanceToFrom); mulEq(dx2, ratioFrom, dxToFrom); mulEq(dy2, ratioFrom, dyToFrom); } if( closeToFrom==true ) { eq(x2, trk.xFrom); eq(y2, trk.yFrom); }..............
*J. Allen, “Towards a General Theory of Action and Time,” Artificial Intelligence, vol. 23(2), p. 123154, 1984
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
So how does one execute a (temporal) plan?
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
So how does one execute a (temporal) plan?MaI I
Po
Ti
At
Acc
SE
SEPT
cont
e emm
cont
St StSh Sh
Thr
T TTTSt St St
T T ThId Id
Accu AccAcc AccThr
cont
CP( CP( CP(cont
TT
Tem
po
ral P
lan
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
So how does one execute a (temporal) plan?
Execution Engine
Plan(s)
Commands
MaI I
Po
Ti
At
Acc
SE
SEPT
cont
e emm
cont
St StSh Sh
Thr
T TTTSt St St
T T ThId Id
Accu AccAcc AccThr
cont
CP( CP( CP(cont
TT
Tem
po
ral P
lan
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
So how does one execute a (temporal) plan?
Execution Engine
Plan(s)
Environmental State/ObservationsCommands
State Update
MaI I
Po
Ti
At
Acc
SE
SEPT
cont
e emm
cont
St StSh Sh
Thr
T TTTSt St St
T T ThId Id
Accu AccAcc AccThr
cont
CP( CP( CP(cont
TT
Tem
po
ral P
lan
Friday, December 10, 2010

Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
So how does one execute a (temporal) plan?
Execution Engine
Plan(s)
Environmental State/ObservationsCommands
State Update
With
one cav
eat
• Use a single temporal database to enforce planning constraints & for dispatching • Solves dispatachability issues
• Retains causal structure for “reasoning” by the executor
• Execution engine accesses the same plan causal structure and uses same inference mechanism as Planner to the database
MaI I
Po
Ti
At
Acc
SE
SEPT
cont
e emm
cont
St StSh Sh
Thr
T TTTSt St St
T T ThId Id
Accu AccAcc AccThr
cont
CP( CP( CP(cont
TT
Tem
po
ral P
lan
Friday, December 10, 2010
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
So how does one execute a (temporal) plan?
Execution Engine
Plan(s)
Environmental State/ObservationsCommands
State Update
With
one cav
eat
• Use a single temporal database to enforce planning constraints & for dispatching • Solves dispatachability issues
• Retains causal structure for “reasoning” by the executor
• Execution engine accesses the same plan causal structure and uses same inference mechanism as Planner to the database
Teleo-Reactive EXecutive(T-REX)
Functional Layer
MaI I
Po
Ti
At
Acc
SE
SEPT
cont
e emm
cont
St StSh Sh
Thr
T TTTSt St St
T T ThId Id
Accu AccAcc AccThr
cont
CP( CP( CP(cont
TT
Tem
po
ral P
lan
Friday, December 10, 2010

NDDLDDEUROPA
Autonomy: Outer to Inner Space Kanna Rajan, MBARI 2010
So how does one execute a (temporal) plan?
Execution Engine
Plan(s)
Environmental State/ObservationsCommands
State Update
With
one cav
eat
• Use a single temporal database to enforce planning constraints & for dispatching • Solves dispatachability issues
• Retains causal structure for “reasoning” by the executor
• Execution engine accesses the same plan causal structure and uses same inference mechanism as Planner to the database
ROTeleo-Reactive
EXecutive(T-REX)
Functional Layer
MaI I
Po
Ti
At
Acc
SE
SEPT
cont
e emm
cont
St StSh Sh
Thr
T TTTSt St St
T T ThId Id
Accu AccAcc AccThr
cont
CP( CP( CP(cont
TT
Tem
po
ral P
lan
Friday, December 10, 2010