autonomous vehicles sensors and limitations
TRANSCRIPT

Autonomous Vehicles –
Sensors and Limitations
Guy Satat
Computational Imaging for Self-Driving Vehicles @ CVPR 2018

Image source: Cognata

Ideal Sensor
Good resolution
(small voxels)
Recovers depth
Good spectral
resolution
Any WeatherDay / Night
Cost
Visible spectrum
360°
Coverage
Recovers speed
Real time
Short Exposure
Sees low reflectivity
targets
© 2018 Guy Satat. All Rights Reserved.

Common Sensors on AVs
• Ultrasonic
• RGB Camera
• Stereo Camera
• LiDAR
• RADAR
Image source: https://www.wired.com/story/self-driving-cars-perception-humans/© 2018 Guy Satat. All Rights Reserved.
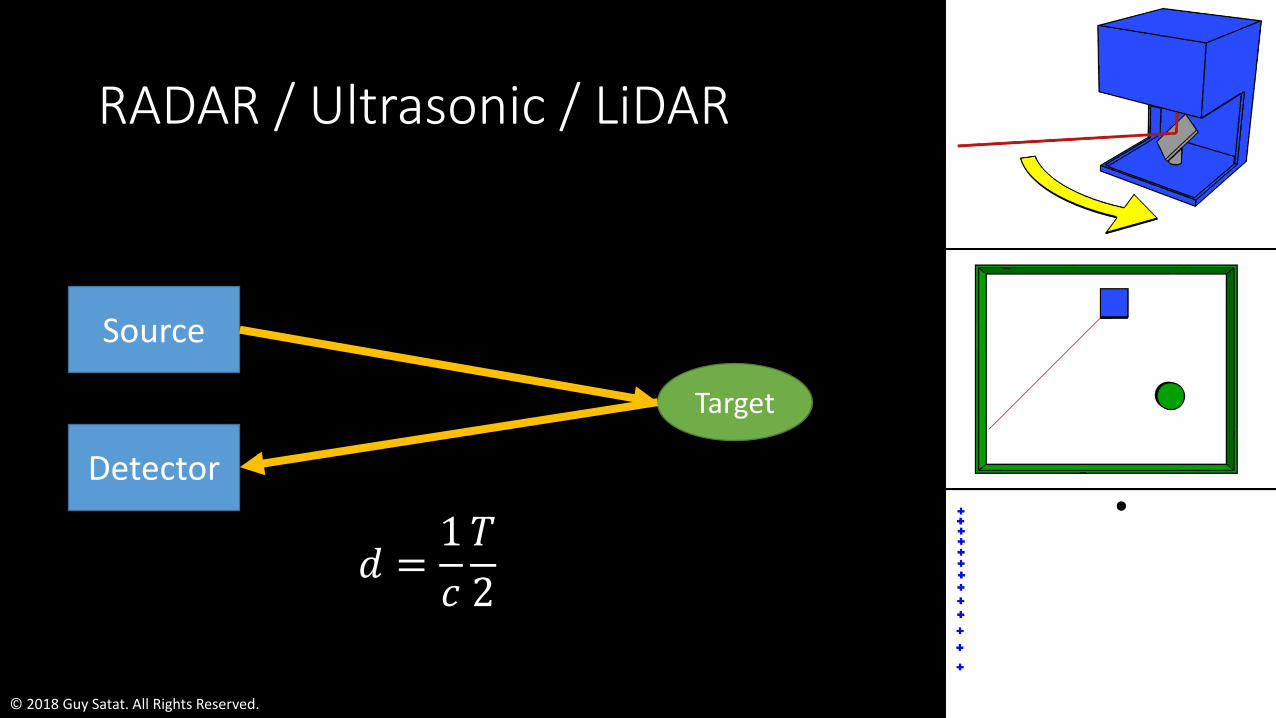
RADAR / Ultrasonic / LiDAR
Source
Detector
Target
𝑑 =1
𝑐
𝑇
2
© 2018 Guy Satat. All Rights Reserved.
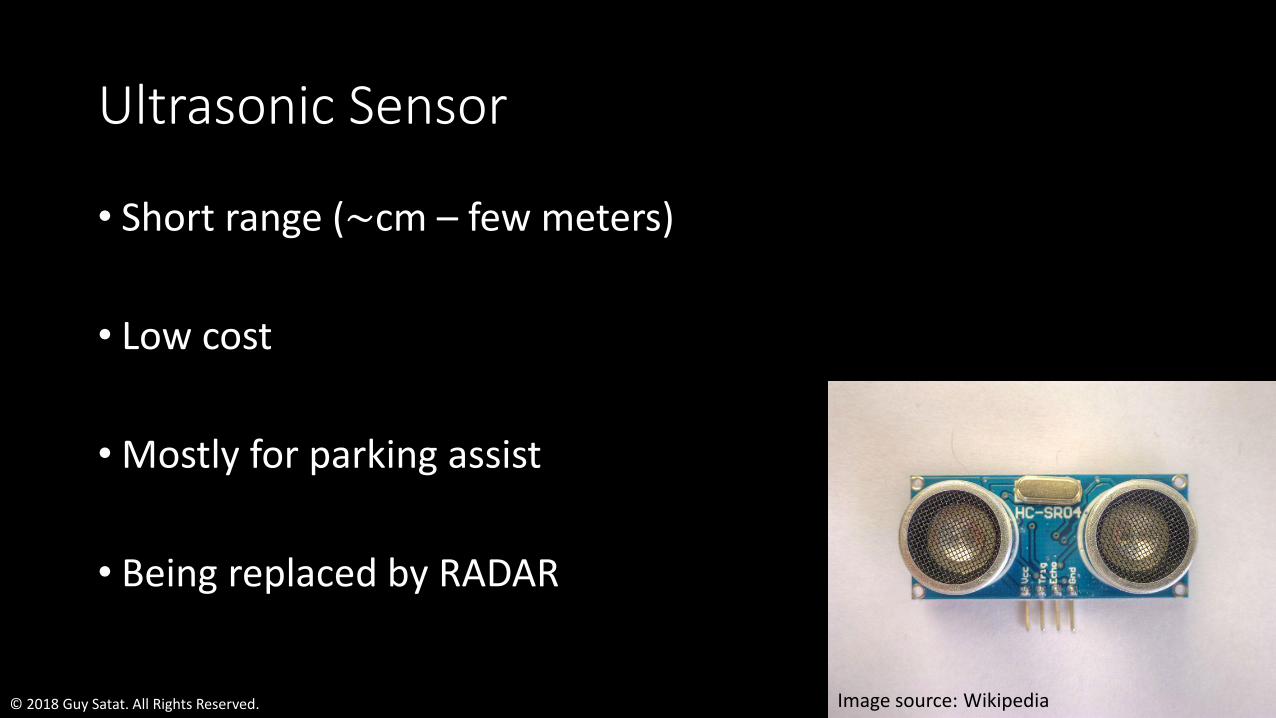
Ultrasonic Sensor
• Short range (~cm – few meters)
• Low cost
• Mostly for parking assist
• Being replaced by RADAR
Image source: Wikipedia© 2018 Guy Satat. All Rights Reserved.

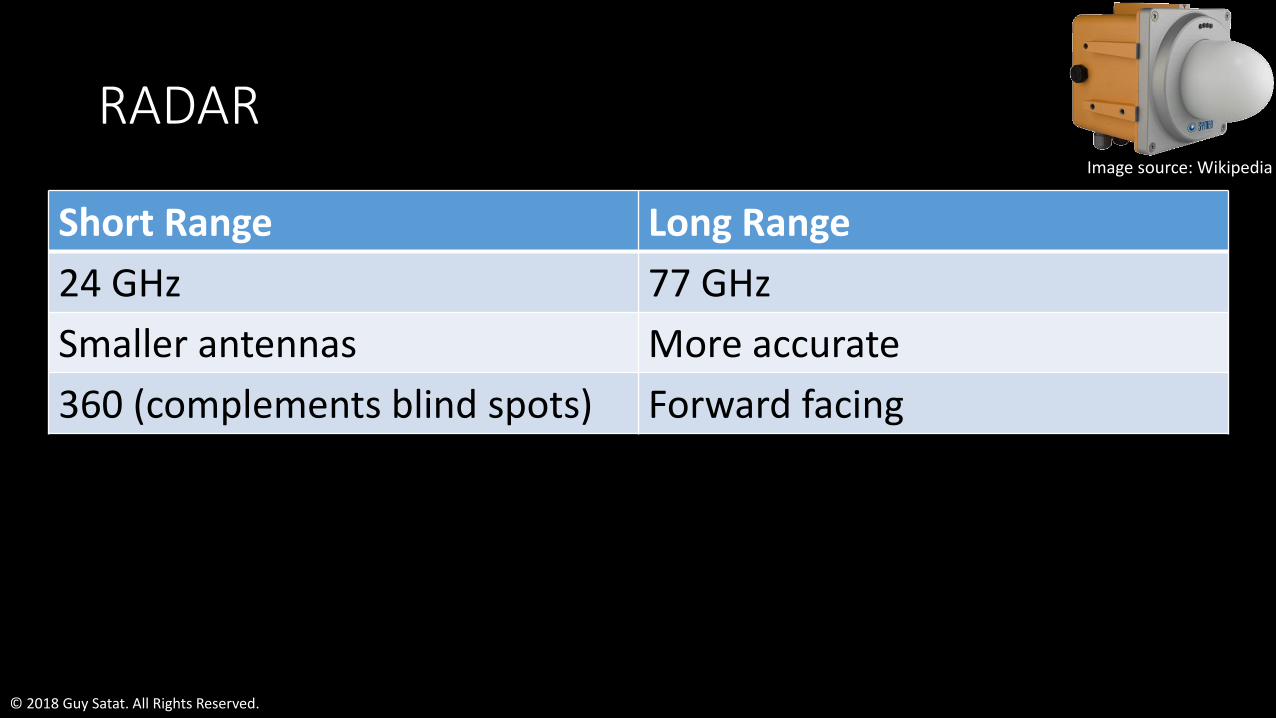
RADAR
Short Range Long Range
24 GHz 77 GHz
Image source: Wikipedia
© 2018 Guy Satat. All Rights Reserved.

RADAR
Short Range Long Range
24 GHz 77 GHz
Smaller antennas More accurate
Image source: Wikipedia
© 2018 Guy Satat. All Rights Reserved.
RADAR
Short Range Long Range
24 GHz 77 GHz
Smaller antennas More accurate
360 (complements blind spots) Forward facing
Image source: Wikipedia
© 2018 Guy Satat. All Rights Reserved.

RADAR
Short Range Long Range
24 GHz 77 GHz
Smaller antennas More accurate
360 (complements blind spots) Forward facing
Used for:• Lane change assist• Parking assist• Cross traffic monitoring
Used for:• Break assist• Adaptive cruise control
Image source: Wikipedia
© 2018 Guy Satat. All Rights Reserved.

LiDAR
• Raster Scan• Multiple beams / detectors
• MEMS
• Solid state
• Limited optical budget• Eye safety
• Usually NIR (905 / 1550nm)
• Cost
• Low reflectivity targets
• Interference
Image source: Wikipedia
Image source: Wikipedia© 2018 Guy Satat. All Rights Reserved.

SPAD Pixel
Time
Pixel𝑇
1
2
2
3
4
3
2
1
1
2
© 2018 Guy Satat. All Rights Reserved.

PixelPixel
SPAD Camera
Pixel
PixelPixel
Pixel
PixelPixel
Pixel
32x32 pixels
© 2018 Guy Satat. All Rights Reserved.

Depth Sensing
© 2018 Guy Satat. All Rights Reserved.
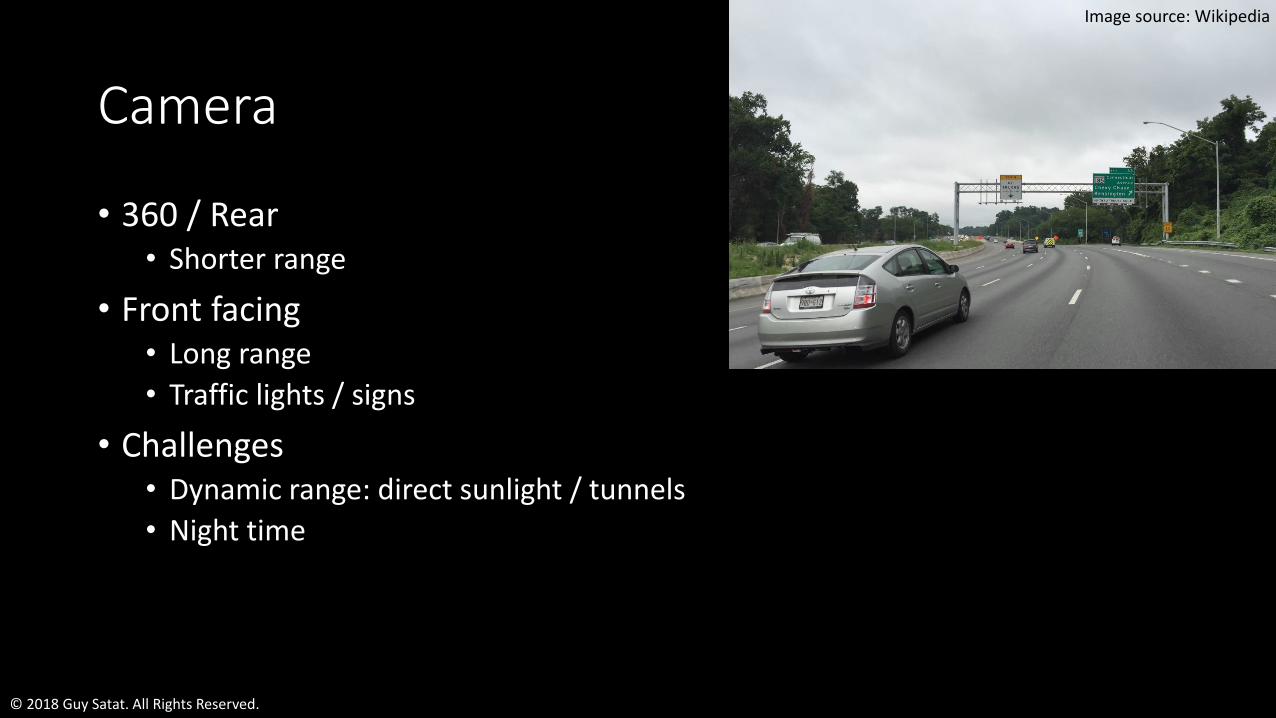
Camera
• 360 / Rear • Shorter range
• Front facing• Long range
• Traffic lights / signs
• Challenges• Dynamic range: direct sunlight / tunnels
• Night time
Image source: Wikipedia
© 2018 Guy Satat. All Rights Reserved.

Radar
Ultrasonic
Camera
LiDAR
Classification Localization Night Availability Any Weather
© 2018 Guy Satat. All Rights Reserved.

X rays UV IR Microwave Radio Waves
Visible
Wavelength
Visible Light:
• Good resolution (compared to RF)
• Optical contrast
• Non-ionizing radiation
Imaging Across the EM Spectrum
Wavelengths:
• EM Visible ~𝜇𝑚
• EM Radio ~𝑐𝑚
• Ultrasound: > 𝑐𝑚© 2018 Guy Satat. All Rights Reserved.

Wildlife Rehabilitation Center of Minnesota
Optical Contrast
© 2018 Guy Satat. All Rights Reserved.
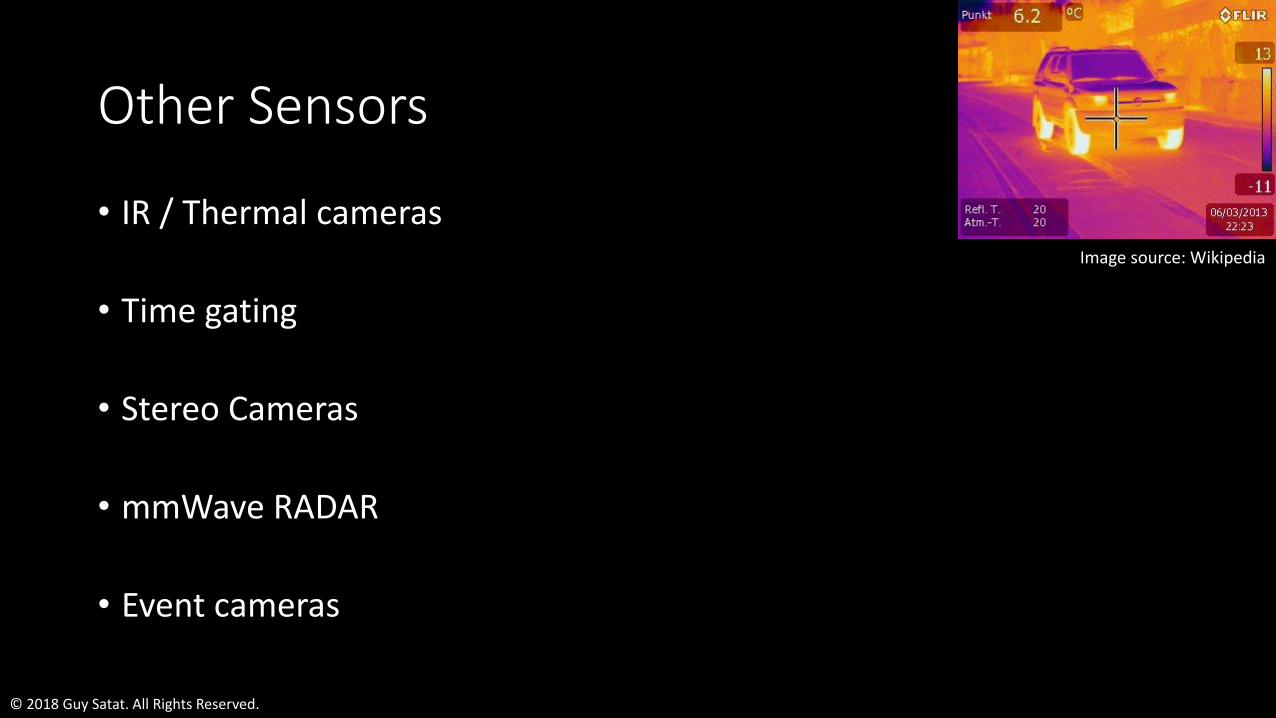
Other Sensors
• IR / Thermal cameras
• Time gating
• Stereo Cameras
• mmWave RADAR
• Event cameras
Image source: Wikipedia
© 2018 Guy Satat. All Rights Reserved.

Sensor Fusion
RADAR
Perceived Environment
Drive Control
Camera
Perceived Environment
Drive Control
LiDAR
Perceived Environment
Drive Control
Fusion
LiDAR RADAR Camera
Fusion
Drive Control
Perceived Environment
© 2018 Guy Satat. All Rights Reserved.
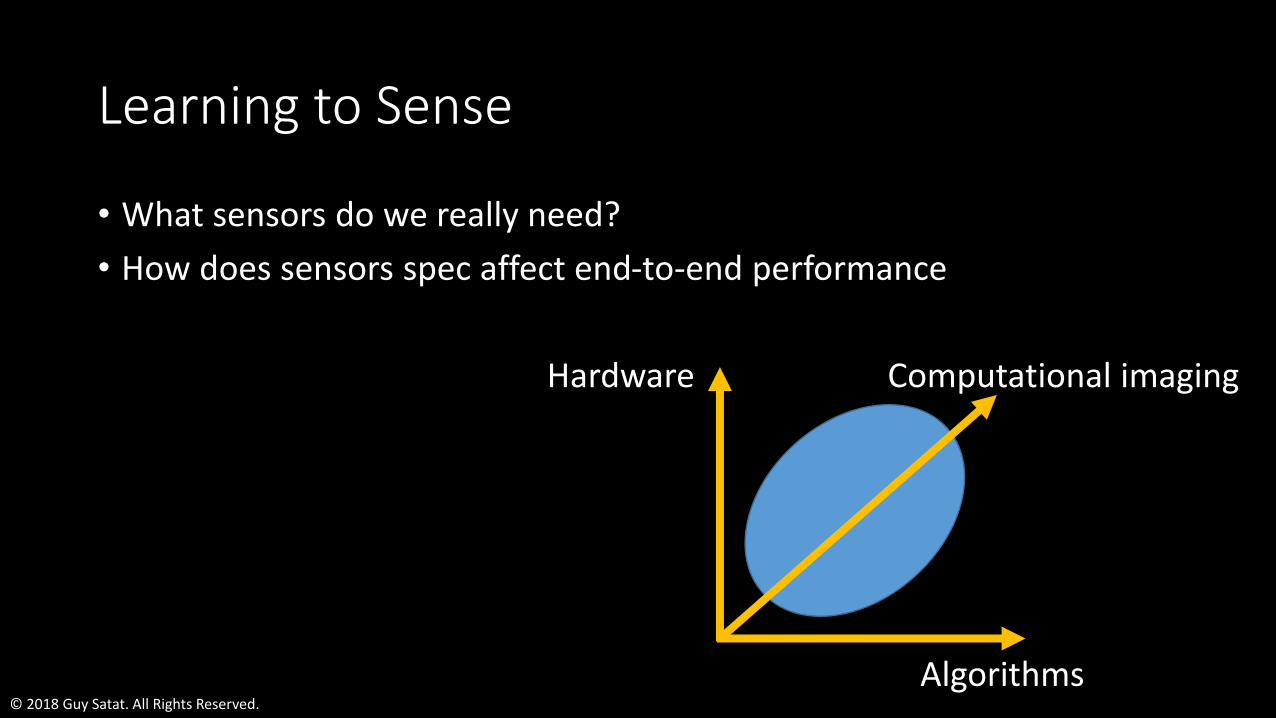
Learning to Sense
• What sensors do we really need?
• How does sensors spec affect end-to-end performance
Hardware
Algorithms
Computational imaging
© 2018 Guy Satat. All Rights Reserved.

Key Takeaways
• Different sensors for:• Complement limitations
• Different applications
• Ultrasonic, RADAR, LIDAR, Camera
• Sensor Fusion
Images source: Wikipedia© 2018 Guy Satat. All Rights Reserved.