automatizacion
TRANSCRIPT
AUTOMATIZACIÓN INDUSTRIAL
Ing. Johnny Omar Medina Duran
DEFINICIÓN
Es el uso de sistemas o elementos computarizados y electromecánicos para controlar maquinarias y/o procesos industriales.La automatización como una disciplina de la ingeniería abarca la instrumentación industrial, que incluye los sensores, los transmisores de campo, los sistemas de control y supervisión, los sistemas de transmisión y recolección de datos y las aplicaciones de software en tiempo real para supervisar, controlar las operaciones de plantas o procesos industriales.
COMPONENTES DE UN SISTEMA AUTOMATIZADO
Elementos de controlSon los elementos de cálculo y control que gobiernan el proceso, se denominan autómatas, y conforman la unidad de control.
COMPONENTES DE UN SISTEMA AUTOMATIZADO
MáquinasSon los equipos mecánicos que realizan los procesos, de los productos o materia prima.

COMPONENTES DE UN SISTEMA AUTOMATIZADO
ActuadoresSon los elementos que permiten realizar movimientos, según las ordenes de un controlador.

COMPONENTES DE UN SISTEMA AUTOMATIZADO
PreactuadorSe usan para comandar y activar los actuadores. Por ejemplo, contactores, switches, variadores de velocidad, distribuidores neumáticos, etc.

COMPONENTES DE UN SISTEMA AUTOMATIZADO
SensoresSon los captadores y transmisores, encargados de captar las señales necesarias para conocer el estado del proceso, y luego enviarlas a la unidad de control.

COMPONENTES DE UN SISTEMA AUTOMATIZADO
Interfaz hombre-máquinaPermite la comunicación entre el operario y el proceso, puede ser una interfaz gráfica de computadora, pulsadores, teclados, visualizadores, etc.
PARTES DE UN SISTEMA AUTOMATIZADO.Los sistemas automatizados se conforman de dos partes: parte de mando y parte operativa:
Parte de mando: Es la estación central de control o autómata. Es el elemento principal del sistema, encargado de la supervisión, manejo, corrección de errores, comunicación, etc.
Parte operativa: Es la parte que actúa directamente sobre la máquina, son los elementos que hacen que la máquina se mueva y realice las acciones. Son los sensores y los actuadores, por ejemplo, los motores, cilindros, compresoras, bombas, relés, etc.

¿Que se necesita para planear un sistema automatizado?
Para diseñar un sistema automatizado es importante identificar y analizar la necesidad que se desea suplir, definir las ideas y de esta manera formular los objetivos y planes de proyecto.

SENSORES
Son dispositivos con la capacidad de detectar las diversas variables físicas de los objetos como energía, velocidad, aceleración, tamaño y cantidad, con el fin de convertir la medición de estas variables en una señal eléctrica, ya sea, binaria, analógica o digital.

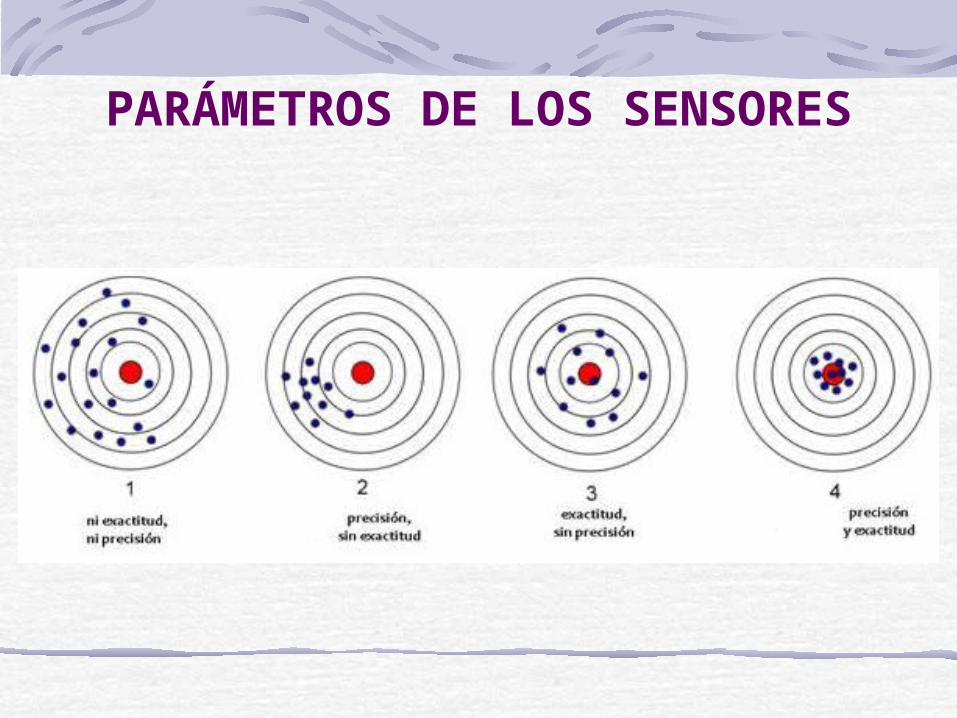
PARÁMETROS DE LOS SENSORESExactitud
la proximidad entre el valor medido y el valor “verdadero”, una medición es más exacta cuanto más pequeño es el error de medida.
Precisión
proximidad entre las indicaciones o valores medidos de un mismo mensurando, obtenidos en mediciones repetidas, bajo condiciones especificadas.
PARÁMETROS DE LOS SENSORES
PARÁMETROS DE LOS SENSORES
Rango de funcionamientoEl sensor debe tener un amplio rango de funcionamiento y debe ser exacto y preciso en todo el rango.
Velocidad de respuestaEl sensor debe ser capaz de responder a los cambios de la variable detectada en un tiempo mínimo. Lo ideal sería una respuesta instantánea.

PARÁMETROS DE LOS SENSORESHistéresisla diferencia entre la distancia de activación y desactivación. Cuando un objeto acerca a un sensor de proximidad, éste lo detecta a la "distancia de detección" o "distancia de sensado". Cuando el mismo objeto es alejado, el sensor no lo deja de detectar inmediatamente, sino cuando alcanza la "distancia de reset" o "distancia de restablecimiento", que es igual a la "distancia de detección" más la histéresis propia del sensor.

PARÁMETROS DE LOS SENSORES
La linealidad Expresa el grado de coincidencia entre la curva de calibración y una línea recta determinada. Según la forma de establecer la recta se clasifica en:

DETECTORES.
Se llama detector a un sensor que solamente es capaz de distinguir entre dos posibles valores o estados del sistema que se mide, por lo cual también recibe el nombre de sensor binario o sensor todo/nada.

CLASIFICACIÓN DE LOS DETECTORES DE PROXIMIDAD
De acuerdo al tipo de captador utilizado para realizar su acción básica de transducción, los más comunes son los inductivos, los capacitivos, los ópticos, los ultrasónicos y los electromagnéticos. Dentro de cada una de estas categorías, existen sus propias clasificaciones, siendo las más comunes las relacionadas con el tipo de alimentación (AC o DC), el tipo de salida (todo o nada y analógica) y el tipo de conexión (dos hilos, tres hilos, cuatro hilos).
CLASIFICACIÓN DE LOS DETECTORES DE PROXIMIDAD
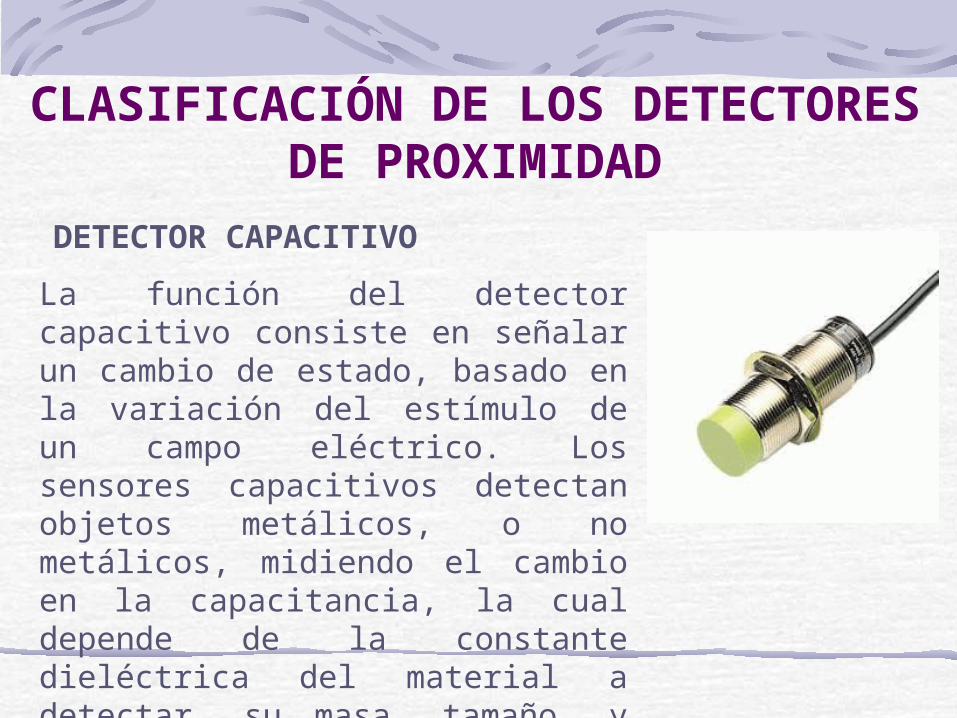
DETECTOR CAPACITIVO
La función del detector capacitivo consiste en señalar un cambio de estado, basado en la variación del estímulo de un campo eléctrico. Los sensores capacitivos detectan objetos metálicos, o no metálicos, midiendo el cambio en la capacitancia, la cual depende de la constante dieléctrica del material a detectar, su masa, tamaño, y distancia hasta la superficie sensible del detector.

CLASIFICACIÓN DE LOS DETECTORES DE PROXIMIDAD
DETECTOR INDUCTIVO
diseñados para trabajar generando un campo magnético y detectando las pérdidas de corriente de dicho campo generadas al introducirse en él los objetos metálicos.

CLASIFICACIÓN DE LOS DETECTORES DE PROXIMIDAD
FIN DE CARRERA
El final de carrera o sensor de contacto (también conocido como "interruptor de límite") o limit swicht, son dispositivos eléctricos, neumáticos o mecánicos, con el objetivo de enviar señales que puedan modificar el estado de un circuito. Internamente pueden contener interruptores normalmente abiertos (NA), cerrados (NC) o conmutadores dependiendo de la operación que cumplan al ser accionados.

CLASIFICACIÓN DE LOS DETECTORES DE PROXIMIDAD
SENSOR INFRARROJO
Sensor infrarojo de barrera
Sensor auto réflex
Sensor reflex

DETECTORES DE ACUERDO AL TIPO DE SALIDA

SALIDA DE DOS HILOS
Los sensores con salidas a dos hilos se alimentan a través de la corriente de la carga, por lo que cuando el sensor está abierto deja pasar una pequeña corriente necesaria para su alimentación, del orden de algunos mA y del mismo modo cuando el sensor está activo mantiene una tensión residual entre sus bornes para alimentarse.

SALIDA DE DOS HILOS
Salida de dos hilos en corriente alterna salida de dos hilos en corriente continua
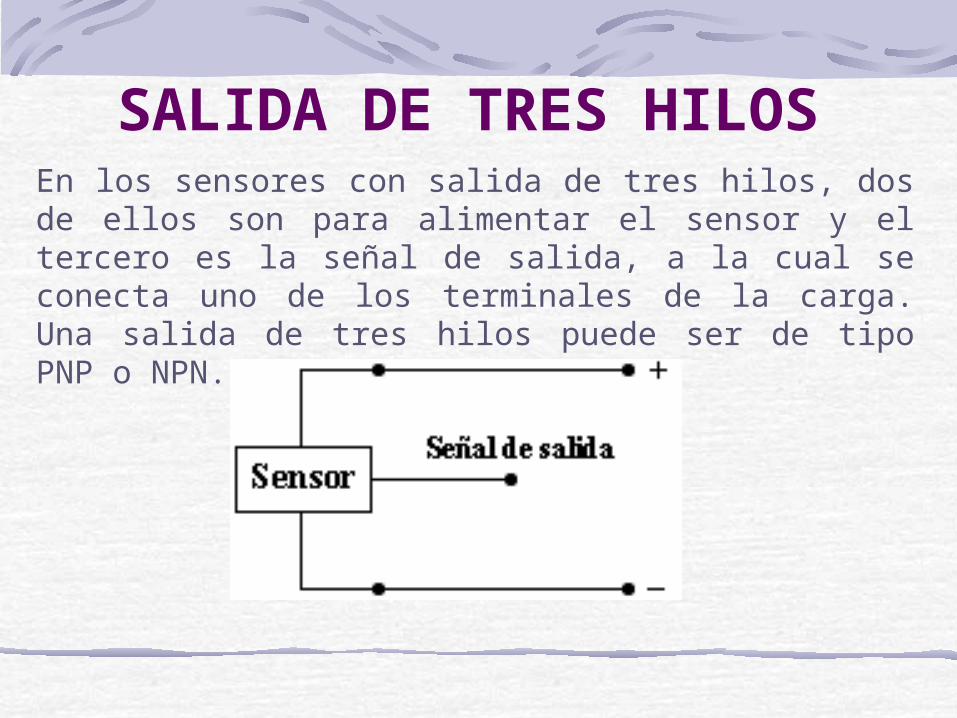
SALIDA DE TRES HILOSEn los sensores con salida de tres hilos, dos de ellos son para alimentar el sensor y el tercero es la señal de salida, a la cual se conecta uno de los terminales de la carga. Una salida de tres hilos puede ser de tipo PNP o NPN.

SALIDA DE TRES HILOS
SALIDA DE TRES HILOS NPN SALIDA DE TRES HILOS PNP

SALIDA DE CUATRO HILOS
Los sensores con salidas de cuatro hilos, usan dos para la alimentación y los otros dos proporcionan dos señales de salida, una antivalente de la otra.

TERMINALES DE LOS SENSORES DE PROXIMIDAD
Los cables que se utilizan para los sensores siguen unos estándares europeos e internacionales que permiten distinguir con facilidad que función tiene cada cable.Alimentación positiva (+): El cable es marrón y se denomina BN del inglés brownAlimentación negativa (-): El cable es azul y se denomina BU del inglés blueSalida del sensor: El cable es negro y se denomina BK del inglés blackSalida antivalente o normalmente cerrada: El cable es blanco y se denomina WH del inglés white.