automated marine propeller optimal design combining ... · pdf fileautomated marine propeller...
TRANSCRIPT

Automated Marine Propeller Optimal Design Combining Hydrodynamics
Models and Neural Networks
Danilo Calcagni, CNR-INSEAN, Rome/Italy, [email protected]
Giovanni Bernardini, University Roma Tre, Rome/Italy, [email protected]
Francesco Salvatore, CNR-INSEAN, Rome/Italy, [email protected]
Abstract
In the present paper, a computationally efficient methodology to develop fast and reliable propeller
selection procedures based on a fully automated optimization technique is described. To this aim, a
comprehensive propeller hydrodynamics model is combined with performance prediction acceleration
techniques based on Neural Networks. Under given operating conditions, screw characteristics and
blade shape details are optimized around a baseline configuration via general-purpose numerical op-
timization software based on genetic algorithms and via a parametric model. Numerical applications
concern the propulsion retrofitting of marine vessels. A off-design performance verification study is
presented to evaluate the robustness of the identified optimal configurations.
1. Introduction
The present work addresses the development of theoretical and computational models for the analysis
and the preliminary design of marine propellers. From a general standpoint, the improvement of
propulsor efficiency is a challenging problem in ship design and has received considerable attention in
the last decade; the reduction of the operating costs accounting for environmental issues (fuel
consumption and NOx emissions, for instance) represents one of the most urgent needs for designers.
Practical interest is given to the design of new propellers to be installed on existing aged vessels. The
replacement of propulsion units represents one of the most viable solutions to achieve remarkable
trade-off between gains in hydrodynamic efficiency and budget necessary. Nowadays, such a design
update strategy (retrofitting) is very popular among ship-owners. The availability of fast and accurate
numerical prediction tools during the pre-design stage is a crucial point to achieve effective
propulsion systems optimization strategies. In fact, guidelines derived at early stage may result into
faster and less expensive iterative procedures within the classical design spiral steps. The standard
technique based on the use of experimental-based systematic propeller series and semi-empirical,
knowledge-based performance prediction models represents the oldest, but still largely used design
strategy, see e.g. Oosterveld and Van Oossanen (1975).
During the last decades, several attempts to enhance design procedures by a full exploitation of state-
of-art computational hydrodynamics models have been proposed. While Computational Fluid
Dynamics (CFD) models for the numerical solution of the Navier-Stokes equations still have a very
limited appeal as preliminary design tools because of computational effort and complexity of
applications to real-life problems, extensive applications of inviscid-flow methods like lifting-line,
lifting surface and panel methods are the subject of a vast literature. Limiting to consider applications
to marine propellers, Coney (1989) develops an inverse design method based on a cascade of a lifting
line/lifting surface models for the determination of the geometrical shape for given performances.
Improvements of this technique are presented by Stubblefield (2008) to design multi-component
propulsors. Druckenbrod et al. (2010) present an improved methodology by coupling a RANSE
solver and a first order panel method for the hydrodynamics analysis of a propulsors in multi-body
configuration. A direct design method is proposed through the application of a genetic algorithm-
based optimizer with design variables controlling blade pitch and chord distributions. Mishima (1996)
and Geisbert and Schroeder (2008) improve the computational efficiency of a direct design method
by applying a regression model to synthesize the response surface of the system. Deng (2005) applies
this technique to cavitating propellers operating in non-uniform onset flow in multi-body
configurations. Constraints on the power delivered by the engine, on the thrust generated at given ship
speed and on acceptable cavitation risk are taken into account.
Following the philosophy of design procedures reviewed above, the present work is aimed at
developing an efficient, fully automated procedure to determine the best propulsive configuration
fitting given operational requirements and constraints. For the optimal solution seeking procedure, a
set of design variables to characterize the screw geometry is firstly defined. Different geometric
configurations may be obtained by changing values of these variables within a suitable bounded
domain: hence, a virtual systematic propeller series is defined and the optimal solution is searched in
its context. The strategy used to find the optimal solution consists of a two step procedure, where two
different sets of design variables are allowed to vary, respectively. In detail, global and local design
variables are introduced and two optimizations (global and local) are performed, where the starting
point for the final optimization (local) is the optimal solution of the first one (global). The
hydrodynamic efficiency is chosen as objective function and contributes to the definition of the
response surface of the system.
An unsteady, three-dimensional hydrodynamics solver based on a Boundary Element Method (BEM)
for the analysis of the flow around thrusting ducted propellers is chosen to provide predictions of
propulsor performance. The response surface is synthesized through a suitable regression model,
based on Neural Networks (NN). The neural network is then interfaced with the optimization tool in
order to explore the surrogate response surface, to define the optimal solution. Two optimization
models are considered here: a Genetic Algorithm (GA) and a simple Parametric Modelling (PM)
approach based on a systematic variation of the design variables. Hull boundary-layer induced effect
is herein modeled through global parameters known from the characterization of the performance of
the existing vessel. Suitable constraints are derived by accounting for hull-propulsor coupling and
from requirements on advance speed, allowable cavity extension and maximum overall dimension.
Results of the application of the proposed methodology to the retrofitting problem of a ducted
propeller of a fishing boat are presented and discussed in details.
2. Problem overview and definition of an optimal design procedure
The development of a fully automated optimal design procedure for marine propellers is carried on
here by integrating the following aspects:
1. definition of a baseline configuration (the reference propeller and its operating conditions)
and parameterization through a limited number of geometry/operational parameters
2. generation of a virtual propeller series by systematic variations of parameters characterizing
the geometry of the baseline configuration
3. construction of a fast computational model to predict the hydrodynamic performance of any
individual from the virtual propeller series
4. selection of the best propulsive configuration by exploring the hyper-surface representing the
hydrodynamic performance of the virtual propeller series.
The first two steps of the overall procedure allow achieving an effective parameterization of the
propeller geometry. Shape manipulations are then obtained by controlling a limited set of parameters
and arbitrary geometry variants to be analysed during the optimal configuration search are easily
obtained. Quantities to describe the propeller geometry fall into two classes: global parameters and
local distributions. A conventional screw propeller can be defined in terms of global parameters as
diameter D, hub/blade diameter ratio H/D, number of blades Z, expanded area ratio EAR, nominal
pitch to diameter ratio P/D. A reference propeller is then uniquely characterised by specifying local
shape details as radial distributions of blade chord C = C(r), pitch P = P(r), skew S = S(r), rake Rk =
Rk(r), maximum sectional thickness TMAX= TMAX (r), camber fMAX= fMAX(r), and blade section offset
distributions along the chord. In the present work a virtual propeller series is built by choosing a
baseline configuration and varying its global parameters D, Z, EAR, P/D within given ranges. All
other global parameters and local distributions are kept the same as for the baseline propeller blade.
In order to make possible extensive investigations at preliminary design stage, a crucial issue is to
develop fast hydrodynamic models to simulate the response of a large number of guess configurations

during the optimal layout search (step 3 above). A distinguishing feature of the proposed procedure is
that hydrodynamic predictions at negligible computational time are achieved by developing a
surrogate model of a standard propeller hydrodynamics model based on a Boundary Element Method
(BEM). The surrogate model is derived by means of a Neural Network model. Finally, the selection of
the best propeller (step 4 above) is accomplished by an optimal design procedure in which the
(surrogate) propeller hydrodynamics model is combined with a fast numerical optimization model
based on Genetic Algorithms.
The optimal design problem involves the definition of design parameters, design objectives and
constraints. Two types of design parameters are considered: geometry parameters to uniquely identify
a given candidate propeller through the smallest number of variables, and operational parameters to
specify ship and propulsion system operating conditions (design conditions). It is worth noting that
the larger the number of geometry parameters, the larger the variety of candidate propellers that can
be explored with inherent advantages in terms of quality of results of the optimization study. A natural
limit to the number of geometry parameters is enforced by the computational effort required by the
overall design procedure. Objective of numerical applications proposed in this paper is to demonstrate
that a design exercise with potential relevance for real-life problems can be addressed by using a very
limited number of design parameters. Specifically, only four global geometry parameters are
considered: propeller diameter D, number of blades Z, expanded area ratio EAR, nominal pitch to
diameter ratio P/D. Such a parameterization is the same used to define the virtual propeller series as
mentioned above. Next, as operational design parameter, the propeller advance coefficient is
considered. In order to cope with hull/propeller interaction effects, the following expression of the
advance coefficient is used: J = Va / (nD), in which Va = (1-w) VShip is the averaged speed at propeller
plane in behind conditions, w is the wake fraction and VShip is the ship advance speed.
Design and optimization goals are defined through one objective function, to maximise propeller
hydrodynamic efficiency, and design constraints to ensure blade strength and to avoid risk of
cavitation-induced vibrations and erosion as clarified later. Global geometry parameters D, Z, EAR,
P/D are varied to determine the best propeller among the propeller models populating the virtual
series defined at the beginning of the procedure. Using this approach, configurations outside the
boundaries of the virtual series cannot be investigated. This introduces some stiffness in the overall
procedure and limits potential efficiency gains achieved through the optimal design analysis. In order
to introduce more flexibility in propeller shape variations addressed during the optimization
procedure, a shape refinement process is then performed once the result of optimal design based on
global parameters is obtained. Specifically, radial distributions of parameters describing blade
planform are varied. To this aim, radial base functions are introduced to define modified distributions
of blade chord, pitch, skew, rake, thickness and camber representative of the virtual series considered
here. Radial base functions are parameterized in order to recast any particular combination of radial
distributions through a limited set of scalar parameters, akin to the manipulation of global geometry
variables. Fig.1 sketches the coupling of different tools integrated into the proposed optimal design
procedure.
Fig.1: Design flow-chart example for the determination of an optimal propeller configuration
3. Analysis and evaluation models
The optimal design procedure outlined in the previous section is general in that different models to

analyse the response of the system to optimise (here, a marine propeller) and to evaluate a number of
guess configurations to find the optimal configuration (the optimization model) can be plugged into
the structure sketched in Fig.1. In the present work, the optimization model is based on Genetic
Algorithms and the hydrodynamics model is based on a Boundary Element Method and its surrogate
model developed through Neural Networks. Basic features of these models are discussed in the
following.
3.1 Numerical Optimization: Genetic Algorithms (GA) and Parametric Model (PM)
In this work two different optimization models are used to seek the optimal solution. Optimization
methods based on genetic algorithms (GA) mimic the biological evolution to find the optimal solution
of a given problem, Holland (1975). Candidate solutions are called individuals and the set of
individuals’ population. Since binary-based (GA) are used here, a chromosome/gene bit-string
notation is used to encode each individual, Raymer(2002). The optimization process starts from a
completely random-generated population (each one related by different chromosome informations)
and evaluates objective functions and constraints. Individuals are compared and a selection of the best
ones is done in order to generate a new offspring. The constraints are included in the optimization
process through a penalty function approach, Hatfka and Gurdal (2008), which enhances the breeding
possibility of individuals potentially able to generate good offsprings. In this sense, constraints are
taken into account indirectly, turning the constrained optimization into a sequence of unconstrained
minimization (maximization) problems. A uniform crossover technique is applied over parents’
chromosomes for child chromosome definition. The individuals selected as parents are the result of a
tournament selection, for which, starting from a random selection of four parents, they are compared
one-vs-one in two pair and the couple of 'winners' are selected to be parents of two children with two
independent crossover operations, in order to keep constant the amplitude of the population. Once the
crossover is performed, a mutation operation is applied, to avoid premature convergence to local
optima. In order to prevent possible negative aspects of the evolution process, at each step of the
optimization process the best individuals are selected to become part of an elite group. They are
represented in the next generation unchanged; this technique avoids the possibility to obtain worse
generation during the process itself. A purely random generation is chosen at the beginning of the
process, in order to cover the wider region of the design variables as possible, therefore, maximizing
the probability to find the global optimum. A non random generation is selected during final phases of
the process, in order to obtain the best solution accordingly to the evolutionary strategy, for which the
genetic patrimony changes not only in view of random factors governed by phate, but even for
characteristics of the ambient in which the population growths. Therefore, initially, bits have a
random distribution, whereas, at final stages, all individuals converge toward the same gene pool
(identical chromosomes). The convergence of the process is evaluated on the basis of the individuals
bit-string affinity, Raymer(2002).
A parametric model is here used in the design process parallel to the genetic algorithm-based
optimizer. The entire hyper-space of configurations is covered using a systematic variation of design
variables. Uniform rates of changing are defined to values representing a good trade-off between
computational efforts and resulting resolution. The optimal solution is estimated within all
configurations that satisfy all the constraints, trying to maximize the objective function.
3.2 Synthesis of complex systems using Neural Networks (NN)
Among all models able to synthesize systems characterized by strong non-linear relationships
between input and output variables, neural networks represent a typical example and are used in this
work. Neural networks were initially developed to simulate learning and synthesis mechanisms in
human brains. Information is elaborated and stored by a complex system of neurons, strictly
interconnected by so called “synapses”. A neural network is able to learn implicitly relationships
between input and output variables of a given system once connections are tailored during the training
phase. Generally speaking, neural networks denote a particular subclass of non linear regression
models applied to synthesize functional relationships between input and output variables in a complex

system. Examples of linear regression models can be found in Myers and Montgomery (1995). Such
models, based on polynomial expansion of the input variables, provide fast predictions of expansion
coefficients, but are strictly dependent on the polynomial order used to express relationships.
Therefore, their use is limited to cases where input/output relationships show a regular and smooth
behavior. Moreover, although the order of polynomial expression is directly related to the accuracy of
the model in training points, such trend isn't assured everywhere; often, a deviation from the real
curve is observed. On the other side, a neural network with two layers (one hidden) has been
demonstrated to play the role of universal approximator for continuous function in Rn, using a wide
class of activation functions, Grippo and Sciandrone (2003), whereas three-layers based neural
networks are characterized by an unbounded lower limit for error, Maiorov and Pinkus (1999).
Here, a feed-forward architecture is used: the signal flow runs from input to output neurons, through
neurons. In Fig. 2, a typical scheme reproducing a feed-forward neural network is shown, as well as
the one of the generic neuron. Formally, the relationship between output and input signals of neuron
“i” of the hidden layer “l” is described in the Fehler! Verweisquelle konnte nicht gefunden
werden.).
(1)
where the sum is extended to all neurons “j” of the hidden layer “l-1”. The relationship between the
output signals of the network and the input variables is therefore determined for given values of
weight connections. The hyperbolic tangent function is here used as “F”.
In the training phase, “examples” of Input/Output combinations are presented to the neural network
that “learn” relationships through an optimization problem expressed in terms of the error Ep, related
to the difference between the output prediction of the network and the value used to train. A
Levenberg-Marquardt technique is applied through a back-propagation scheme to determine the
gradient of the error with respect to connection weights, Grippo and Sciandrone (2003); thus, the
unknown weights are evaluated through a recursive procedure.
Details of the NN architecture proposed in the present work are given in Calcagni et al. (2010) and
Calcagni (2011), where results of the application of the NN to reproduce hydrodynamic performance
of the Wageningen B-series propellers, Kuiper (1992), are discussed. The neural network presented
above is used to synthesize the response surface, built on the dataset of performances predicted by a
potential flow solver applied to propellers of a systematic series in different configurations.
Fig. 2: Typical scheme of a neural network (NN or ANN), based on a multilayer "feed-forward"
architecture. Left: general sketch of the NN. Right: particular view of a generic neuron.
The dataset of performances exerted by propulsors in different configurations represents the complex

system considered in this work. It is used as a black box in the design and optimization procedures:
performances are determined in a fast way with an acceptable accuracy. The use of a surrogate model
is justified when the number of points on which the surface is built is lower then the number of
configurations examined during the optimization phase. In this case consistent computational time
savings can be achieved.
3.3 Propeller hydrodynamics model
The propeller hydrodynamics model used for the training of the NN is based on a Boundary Element
Model (BEM) for potential flows. Comparing computational models used for marine propulsion
studies, BEM are widely recognised as a good trade-off between accuracy of predictions and
computational burden. Here, an approach for open screw propellers developed and validated over the
last decade, Pereira et al. (2004) and Salvatore et al. (2006), has been extended to analyse ducted
propulsors, Salvatore et al. (2006b), where details of the computational methodology are given. Basic
features are here briefly reviewed for the sake of completeness.
Assuming the onset flow is inviscid and incompressible, propulsor-induced perturbation velocity v
may be expressed in terms of a scalar potential as, v = ∇∇∇∇φ where φ is governed by the Laplace
equation ∇2φ = 0. Here, the Laplace equation is solved through a boundary integral formulation,
Morino (1993), that gives φ as a superposition of singularities distributed over the fluid domain
boundary represented by the propulsor solid surface and a surface describing the vortical wake
generated by propeller blades. Impermeability on solid boundaries and vorticity convection along
wakes are imposed to define suitable boundary conditions.
A key feature of the methodology is that unknowns are distributed only over these boundary surfaces
and hence the additional burden of unknowns distributed throughout the fluid region is prevented.
Once equations are written in discrete form, the problem is recast as the solution of a linear system of
algebraic equations. Fig. 3 shows a BEM model computational grid of a ducted propeller with vortical
wakes emanated by blades and by the duct trailing edge. Once the perturbation potential φ is
determined, propeller-induced velocity is determined and pressure follows through Bernoulli's
theorem. Propeller thrust TP, torque QP and duct thrust TD are calculated by integrating the pressure
field over propeller and duct surfaces. A simple equivalent flate-plate approach is used to include
viscous losses on predicted potential forces. In view of applications to optimal design studies, the
capability of BEM to describe open as well as ducted propeller performance is briefly discussed,
whereas more details can be found in Calcagni (2011). As a case study representative of ducted screw
configurations, the CNR-INSEAN E1622 model is considered. Main geometry details are given in
Table I, whereas propeller open-water performance results are shown in Fig. 5, where numerical
predictions by BEM are compared to model tests performed at CNR-INSEAN.
Fig. 3: Three-dimensional model of ducted propeller flow analysis by BEM: computational grids on
propeller, duct and wake surfaces. For clarity, only wake portions shed by one blade and the

corresponding duct sector are shown.
Table I: E1622 full scale main characteristics
DP Z Ae/A0 P/D.7R
2.6 m 4 .69 0.97
Fig. 4: Fishing vessel: fully appended model used for propulsion tests (left) and set-up for ducted
propeller open-water measurements (right). Model tests performed at CNR-INSEAN
Propeller thrust, torque, duct thrust coefficients and hydrodynamic efficiency are defined as in
Fehler! Verweisquelle konnte nicht gefunden werden.); the total amount of thrust is defined as
.
; ; ;
(2)
All quantities are related to the advance ratio J=V/(nD), where V is the advance speed and n, D
denote, respectively, propeller rotational speed and diameter. Reliable predictions of unducted open
water propeller thrust and torque are observed from left Fig. 5. A trend to underestimate propeller
thrust at advance ratio higher than 0.6 is observed. This corresponds to under-predictions of
hydrodynamic efficiency. A similar level of accuracy results from ducted propeller flow studies, right
Fig. 5. In fact, discrepancies between calculations and model test data are present at low advance ratio
and close to zero thrust condition. Lack of accuracy can be partly explained recalling that the inviscid-
flow model by BEM provides only a rough estimate of viscous-flow contributions to propeller loads.
Dealing with ducted propellers in off-design conditions, the effects of boundary layer flow separation
on the outer surface of the nozzle are then largely missed, Caja et al. (2008). Nevertheless, Fig. 5
highlights that propeller loadings in both open and ducted configurations are predicted with
reasonable accuracy over a range of operating conditions close to design condition.
Fig. 5: CNR-INSEAN E1622 model propeller. Open-water performance (thrust, torque, efficiency).

Comparison between numerical predictions by BEM and experimental data. Left: open propeller;
right: ducted propeller.
4. Numerical applications: a propeller design exercise
The proposed computational approach is applied to a propeller design problem taken as representative
of studies commissioned by ship-owners interested to update the propulsion system of existing vessels
(propulsion retrofitting study). The test case is a 1440 DWT deep sea fishing vessel whose main
characteristics are summarized in Table II.
Table II: Fishing vessel: main characteristics (full scale)
LPP GT PMCR nMCR Prop.type
67 m 1440 Gt 2930 Hp 375 rpm FPP in nozzle
This ship has a single-screw hull equipped with a four bladed ducted propeller with similar global
geometrical parameters as the E1622 model addressed in Table I. A λ=12 scaled model of the fully
appended ship was manufactured by CNR-INSEAN to perform a comprehensive set of measurements
in the framework of a research project, see Salvatore et al. (2006) and Calcagni (2011) for details).
Photographs of the ship model and of the ducted propeller during towing tank tests at CNR-INSEAN
are given in Fig. 4. Design conditions considered here reflect the ship operating at low-medium
speed, under high loading conditions occurring during trawling. The optimal configuration is searched
here within a defined virtual systematic propeller series built by varying global shape parameters Z,
EAR (Ae/A0), P/D in the following ranges: 3 ≤ Z ≤ 5 ; 0.5 ≤ Ae/A0 ≤ 0.8 ; 0.85 ≤ P/D ≤ 1.25. Examples
of three configurations obtained by different combinations of these parameters are shown in Fig.6.
Fig.6: Virtual systematic propeller series: examples configurations
4.1. Global design
The developed tool for the optimal design of propellers, has been applied to the test-case described in
the previous section. A suitable optimization technique is based on the recursive query of a surrogate
model, represented by a neural network, trained on performance dataset of the examined propulsion
system. By varying design variables, different propeller configurations are compared with respect to
the defined objective function; the one with the highest objective function while all constraints are
satisfied is the optimal solution. The optimization process consists of two sub-problems, solved
sequentially. Here the first design problem is considered. This case is referred to as “global” design
problem due to the characteristics of the design variables.
The solution is here sought within the (hyper-)space defined by the following geometrical quantities:
diameter (DP), number of blades (Z), expanded area ratio (Ae/A0), pitch to diameter ratio (P/D); all
local geometrical distributions (pitch, chord, skew, camber, rake) are fixed to those of the baseline
propeller. An additional variable represents the operative condition: the speed of the vessel VShip. The
objective is to maximize the objective function (i.e. the hydrodynamics efficiency η0). The working
point represents the matching condition for the system “hull-propeller-engine”. Here, the engine
working point is fixed. Thus the first requirement is represented by a developed power at a given rate

of revolution of the shaft axis. The 85% of the Maximum Continous Rate (MCR) is considered, at a
rate of revolution fixed to n = 250 rpm. Assuming to perform the solution for the vessel in free
running condition, a lower bounded speed has been chosen: VShip min = 7.31 m/s.
Geometrical issues limits the maximum allowable diameter: DP max = 2.7 m. Additional constraints on
torque and on thrust are:
• torque Q absorbed by the propeller must match the torque Qd delivered by the engine, given
the rate of revolution of the shaft axis n. A 2.5% allowance is given to have |(Q - Qd)/Qd| ≤ 2.5
%.
• modified thrust T, exerted by the propeller, must balance the resistance R of the hull, given
the advance speed VShip: |(Th-R)/R| ≤ 2.5 %, where Th=T/(1-t).
The thrust deduction factor t is deduced by self-propulsion tests, with respect to the advance ship
velocity VShip, as well as the wake fraction w.
In order to prevent the risk of cavitation inception on blade surface a simple model, based on the
Keller's formulas, Kuiper (1992), was adopted. The lowest value of the expanded area ratio avoiding
cavitation is determined: it depends on thrust, number of blades, propeller diameter and on the
typology of vessel. Specifically, the constraint is Ae/A0 ≥ (Ae/A0)min, where (Ae/A0)min = (1.3+0.3Z) T
DP2/(p0-pv)+k; here, k = 0.2 for single shaft; p0 represents the static pressure at shaft axis, equal to the
atmospheric pressure added up to the hydrostatic pressure ρ g h; pv represents vapour pressure of the
fluid.
Results of the global optimization exercise are shown in Fig. 7 to 9, where solutions are compared to
the four-bladed reference propeller. Specifically, optimal values of the hydrodynamic efficiency on
the best performing 3-bladed, 4-bladed and 5-bladed screws are shown in left Fig. 7. As an example
of optimal geometry parameters, pitch to diameter ratio for the three different propellers are shown in
right Fig. 7, whereas other quantities (EAR, D, VS) present similar trends and are not shown here,
Calcagni (2011). The optimization model based on genetic algorithms identifies configurations very
close to those obtained by varying systematically design variables (parametric model). Discrepancies
are judged to depend on the step resolution by which the expanded area ratio EAR is modified using
the parametric model and genetic algorithms. In particular, the rate of variation of EAR is higher when
the former approach is used. Here, global parameters take account for the hull-induced wake (thrust
deduction factor t and wake fraction w). Recalling uniform flow operating conditions are addressed
here, the number of blades influences the hydrodynamic efficiency less than what is expected when a
non-uniform onset flow is applied to propeller blades, causing peaks in blade loading distributions.
Fig. 7: Global optimization problem of a fishing vessel in free running condition. Left: hydro-
dynamic efficiency over the number of blades. Right: pitch to diameter ratio over the number of
blades.
In Table III main data of different optimal solutions by means of the number of blades are presented
and compared to those of the reference propeller, whereas corresponding performances are listed in
Table IV. It should be noted that the three optimal propellers achieve the highest efficiency values
compliant with existing constraints at different operating conditions, as reflected by different values

of ship velocity in Table III. Matching ship velocity and hull resistance as well as hull-propeller
interaction parameters t and w from available self propulsion-test results, the new operating
conditions in Table III follow. Recalling optimization is based on a neural network-based surrogated
model of propeller hydrodynamics by BEM, it is worth to compare efficiency gain results outlined
above with results of optimised propeller flow studies by full BEM calculations.
Table III: Results of global optimization of E1622 model propeller: main geometrical data and
operative conditions
D(m) Z EAR P/D VS(m/s) 1-w 1-t RS(t) J
E1622 2.60 4 .67 0.98 7.59 .769 1.034 16.7 .513
OPTG3 2.69 3 .60 0.89 7.58 .768 1.034 16.6 .518
OPTG4 2.47 4 .77 1.06 7.63 .770 1.035 17.1 .571
OPTG5 2.45 5 .85 1.07 7.65 .771 1.036 17.2 .578
Table IV: Results of global optimization of E1622 model propeller: performances. Comparison by
means of different working points, each satisfying thrust and torque constraints. Symbol (*) denotes
data not available because referred to a propeller not taken from the propeller series.
J KTT 10KQ ηBEM ∆ηBEM(%) ηNN ∆ηNN(%) E1622 .513 .200 .317 .516 - - (*) -
OPTG3 .518 .170 .264 .532 +3.06 .536 +3.78
OPTG4 .571 .248 .425 .530 +2.63 .534 +3.47
OPTG5 .578 .260 .450 .531 +2.93 .537 +4.07
Fig. 8: Global optimization problem of a fishing vessel in free running condition. Pressure coefficient
distribution over the blade surface. Left: E1622 reference model propeller (J=0.514). Center: 4-
bladed solution OPTG4 (J=0.578). Right: 5-bladed solution OPTG5.
Fig. 9: Global optimization problem of a fishing vessel in free running condition. Efficiency over the
advance coefficient. Comparison between reference propeller and optimized solutions with 4 and 5
blades.

As example, predictions by full BEM show that efficiency improvements in the order of 2.7% are
achieved for the 4-bladed solution OPTG4 compared to the baseline propeller, whereas ∆η predictions
by NN is 3.5%, as reported in the last column in Table IV. This result can be taken as a global
indicator of the confidence of the surrogate model considered here. Blade pressure distributions on the
baseline propeller and on 4-bladed and 5-bladed configurations are shown in Fig. 8.
Finally, robustness of the optimal solutions found at design conditions with advance ration J close to
0.55 (Tables III and IV above) has been checked over a wide range of operational conditions between
J = 0.1 and J = 1.1, including off-design conditions.
Numerical calculations of propeller efficiency are plotted in Fig. 9. Compared to the baseline
propeller, optimized solutions are characterized by increased efficiency at high values of the advance
coefficient, whereas limited loss of performance are observed at low J. These results highlight the
importance to develop the present methodology in order to include multiple design points over a wide
range of operational conditions, as to ensure a robust optimization.
A general conclusion from the global optimization exercise discussed so far is that similar amounts of
hydrodynamic efficiency gains have been achieved with propellers having 3, 4 and 5 blades. Results
in left Fig. 7 and in Table IV point out some advantage of the 5-bladed configuration, where the
smallest blade loading density is expected and a smoother pressure distribution is evaluated, Fig. 8.
For these reasons, the 5 bladed solution (labelled as OPTG5) is chosen to be further optimized through
the local refinement approach.
4.2. Local refinement
Once the “global” design problem is addressed, a new propeller family is built around the optimal
configuration; thus, a “local” refinement is possible. Global variables are now frozen and the
geometrical radial distributions are free to vary within limited boundaries. All local quantities g0 are
modified by suitable functions ∆g, expressed by polynomial functions of the radius, such that
, with -1 ≤ k ≤ 1. All individuals of the new propeller series are
characterized by the same dataset Z, D, Ae/A0, P/D, J, whereas differences characterize the following
radial dimensionless geometrical distributions: pitch P(r)/D; chord C(r)/D; skew Sk(r)/D; maximum
camber fmax(r)/C; rake Rk(r)/D. Here, the same procedure of the global design stage is used, and the
results obtained by different optimization models are shown. Specifically, pitch and chord
distributions are presented in Fig. 10, where optimal distributions are shown as well as bounding
curves (indicated by purple lines); skew and rake are characterized by similar trends and are not
shown here. Right Fig. 10 shows that the optimal configuration is characterized by a chord
distribution that overlaps one of the two bounding curves. This is a rather frequent result due to the
introduction of constraints in the optimization procedure.
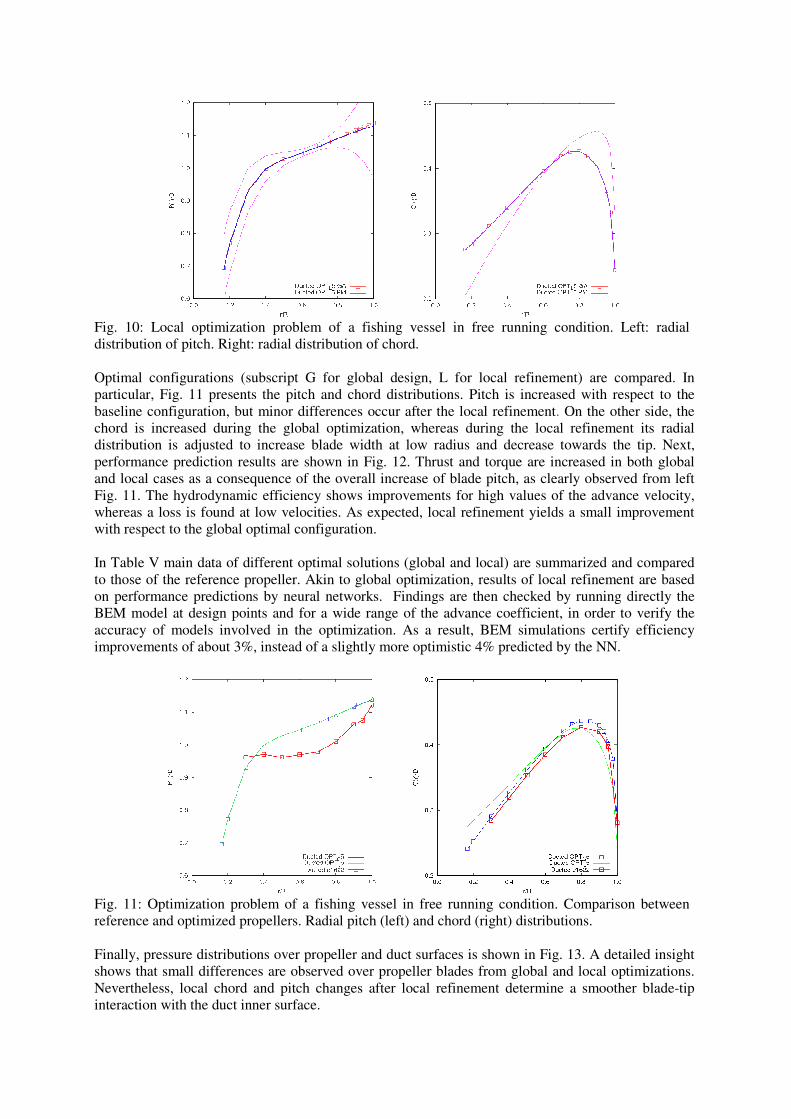
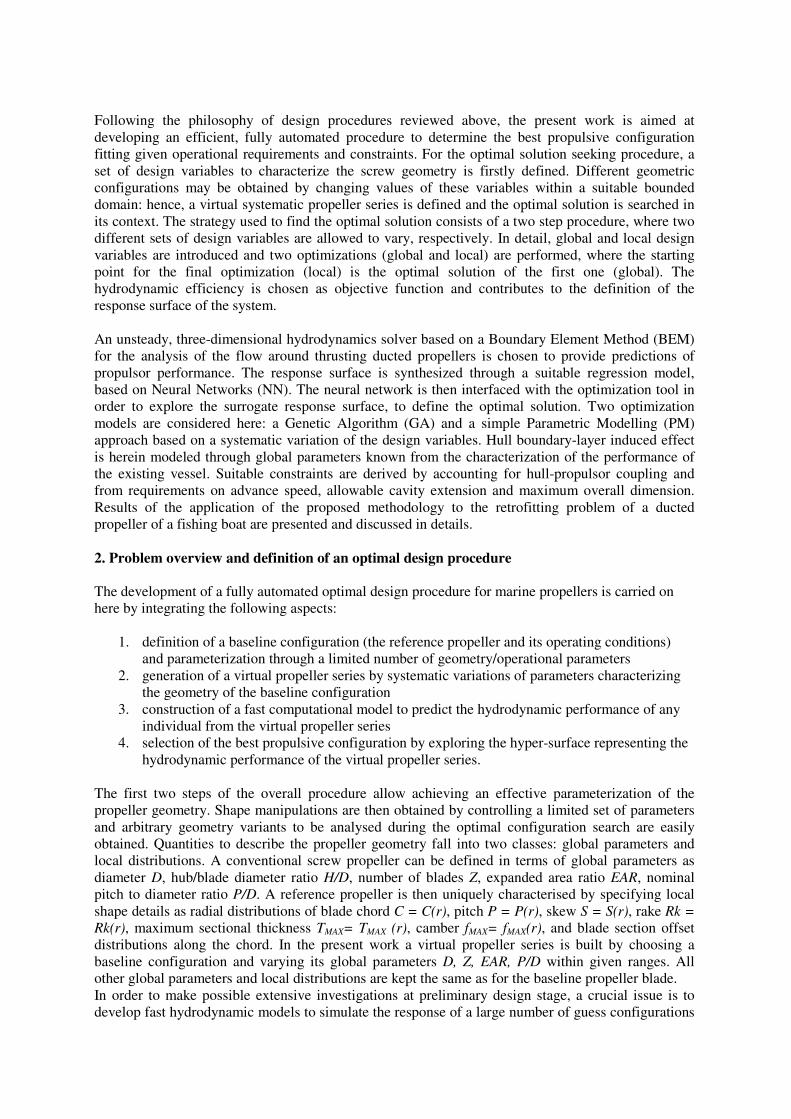
Fig. 10: Local optimization problem of a fishing vessel in free running condition. Left: radial
distribution of pitch. Right: radial distribution of chord.
Optimal configurations (subscript G for global design, L for local refinement) are compared. In
particular, Fig. 11 presents the pitch and chord distributions. Pitch is increased with respect to the
baseline configuration, but minor differences occur after the local refinement. On the other side, the
chord is increased during the global optimization, whereas during the local refinement its radial
distribution is adjusted to increase blade width at low radius and decrease towards the tip. Next,
performance prediction results are shown in Fig. 12. Thrust and torque are increased in both global
and local cases as a consequence of the overall increase of blade pitch, as clearly observed from left
Fig. 11. The hydrodynamic efficiency shows improvements for high values of the advance velocity,
whereas a loss is found at low velocities. As expected, local refinement yields a small improvement
with respect to the global optimal configuration.
In Table V main data of different optimal solutions (global and local) are summarized and compared
to those of the reference propeller. Akin to global optimization, results of local refinement are based
on performance predictions by neural networks. Findings are then checked by running directly the
BEM model at design points and for a wide range of the advance coefficient, in order to verify the
accuracy of models involved in the optimization. As a result, BEM simulations certify efficiency
improvements of about 3%, instead of a slightly more optimistic 4% predicted by the NN.
Fig. 11: Optimization problem of a fishing vessel in free running condition. Comparison between
reference and optimized propellers. Radial pitch (left) and chord (right) distributions.
Finally, pressure distributions over propeller and duct surfaces is shown in Fig. 13. A detailed insight
shows that small differences are observed over propeller blades from global and local optimizations.
Nevertheless, local chord and pitch changes after local refinement determine a smoother blade-tip
interaction with the duct inner surface.

Fig. 12: Optimization problem of a fishing vessel in free running condition. Comparison between
reference and optimized propellers. Thrust (left), torque (center) coefficients and efficiency (right)
over the advance coefficient.
Table V: Geometrical parameters and performances of propeller resulting in the optimization
problem of ducted propellers. Comparison by means of different working points, each satisfying
thrust and torque constraints. Symbol (*) denotes data not available because referred to a propeller
not taken from the propeller series.
J KTT 10KQ ηBEM ∆ηBEM(%) ηNN ∆ηNN(%) E1622 .513 .200 .317 .516 - - (*) -
OPTG5 .578 .260 .450 .531 +2.93 .537 +4.07
OPTL5 .578 .247 .423 .537 +4.01 .538 +4.12
OPTG4 .578 .245 .422 .533 +2.63 .534 +3.47
Fig. 13: Local refinement optimization problem of a fishing vessel in free running condition.
Pressure coefficient distribution over the blade surface: local refined propeller: OPTL5 (J=0.578).
5. Conclusion
The present work addresses the development of theoretical and computational models for the analysis
and the preliminary design of marine propellers. The present work has been aimed at developing an
efficient, fully automated procedure to determine the best propulsive configuration fitting given
operational requirements and constraints. A virtual systematic propeller series has been defined and
the optimal solution has been searched in its context. The strategy used to find the optimal solution
consists of a two step procedure, where two different sets of design variables were allowed to vary,
respectively. In detail, global and local design variables were introduced and two optimizations
(global and local) were performed, where the starting point for the final optimization (local) was
represented by the optimal solution of the first one (global). The hydrodynamic efficiency has been
chosen as objective function. An unsteady, three-dimensional hydrodynamics solver based on a
Boundary Element Method (BEM) for the analysis of the potential flow around thrusting ducted
propellers has been chosen to provide predictions of propulsor performance. The response surface was
synthesized through a suitable regression model, based on Neural Networks (NN). The neural network
has been interfaced with the optimization tool in order to explore the surrogate response surface, to

define the optimal solution.
Two optimization models were considered here: a Genetic Algorithm (GA) and a simple Parametric
Modelling (PM) approach based on a systematic variation of the design variables. Hull boundary-
layer induced effect has been herein modeled through global parameters known from the
characterization of the performance of the existing vessel. Suitable constraints were derived by
accounting for hull-propulsor coupling and from requirements on advance speed, allowable cavity
extension and maximum overall dimension. Results of the application of the proposed methodology to
the retrofitting problem of a ducted propeller of a fishing boat in free running condition were
presented and discussed in details. Results are judged to be satisfactory because: a) different
optimization models provide similar solutions; b) optimal solutions show gain both in hydrodynamics
efficiency and speed limit; c) the surrogate model, queried by the optimization model, approximates
accurately the response surface of the system. The analysis undertaken for the verification of the
robustness of the optimization procedure suggests that a definition of multiple design points may be
an optimal approach to improve performances of the design procedure. Hence, further improvements
can be achieved by extending the present methodology to robust optimization procedures and by
improving the accuracy of the present hydrodynamics flow model considering a suitable model for the
boundary layer estimation.
References
BALTAZAR, J.; FALCAO DE CAMPOS, J.A.C. (2009), On the modelling of the flow in ducted
propellers with a panel method, 1st Int. Symp. Marine Propulsors (SMP), Trondheim
SANCHEZ_CAJA, A.; PYLKKANEN, J. V.; SIPILA, T. P. (2008), Simulation of the incompressible
viscous flow around ducted propellers with rudders using a RANSE solver, 27th Symp. Naval Hydro-
dynamics, Seoul
CALCAGNI, D.; SALVATORE, F.; BERNARDINI, G.; MIOZZI, M. (2010), Automated marine
propeller design combining hydrodynamics models and neural networks, 1st Int. Symp. Fishing Vessel
Energy Efficiency, Vigo
CALCAGNI, D. (2011), Sviluppo di un modello teorico e computazionale per l’analisi di propulsori
e velivoli ad ala rotante, basato su tecniche di sintesi di sistemi complessi mediante reti neurali,
CNR-INSEAN TR2011-PHD-002
CONEY, W.B. (1989), A method for the design of a class of optimum marine propulsors, PhD Thesis,
Massachusetts Institute of Technology
DENG, Y. (2005), Performance database interpolation and constrained nonlinear optimization
applied to propulsor blade design, Master Thesis, Austin University of Texas
DRUCKENBROD, M.; HUNDEMEW, J.; ABDEL-MAKSOUD, M.; STEDEN, M. (2010), Opti-
mization of single and multi-component propulsors, 9th Int. Conf. Computer and IT Applications in
the Maritime Industries (COMPIT), Gubbio
GEISBERT, J.J.; SCHROEDER, S.D. (2008), A stock propeller design for the high speed sealift
hybrid contra-rotating shaft-pod, Model 5653-3A, NSWCCD-50-TR-2008/003, Naval Surface
Warfare Center, Bethesda
HATFKA, R.T.; GURDAL, Z. (1992), Element of Structural Optimization, Kluwer Academy Publ.
HOLLAND, J.H. (1975), Adaptation in nature and artificial systems, Univ. of Michigan Press
KUIPER, G. (1992), The Wageningen propeller series, MARIN Publication 92-001

MAIOROV, V.; PINKUS, A. (1999), Lower bounds for approximating by MLP neural networks,
Neurocomputing 25, pp.81-91
MISHIMA, S. (1996), Design of cavitating propeller blades in non-uniform flow by numerical
optimization, PhD Thesis, Massachusetts Institute of Technology
MORINO, L., (1993), Boundary integral equations in aerodynamics, Applied Mechanics Reviews
46/8, pp.445-466
MYERS, R.H.; MONTGOMERY, D.C. (1995), Response Surface Methodology, John Wiley & Sons
OOSTERVELD, H.W.C.; VAN OOSSANEN, P. (1975), Further computer-analyzed data of the
Wageningen B-screw series, Int. Shipbuilding Progress 22/251
PEREIRA, F.; SALVATORE, F.; DI FELICE, F. (2004), Measurement and modelling of propeller
cavitation in uniform inflow, J. Fluids Engineering 126, pp.671-679
RAYMER, P.D. (2002), Enhancing aircraft conceptual design using multidisciplinary optimization,
PhD Thesis, Royal Institute of Technology, Stockholm
GRIPPO, L.; SCIANDRONE, M. (2003), Metodi per l'Ottimizzazione per le Reti Neurali, Technical
Report 09-03, Università di Roma "La Sapienza"
SALVATORE, F.; TESTA, C.; IANNIELLO, S.; PEREIRA, F. (2006a), Theoretical modelling of
unsteady cavitation and induced noise, CAV 2006 Symp., Wageningen
SALVATORE, F.; CALCAGNI, D.; GRECO, L. (2006b), Ducted propeller performance analysis
using a boundary element model, INSEAN Technical Report / 2006-083
STUBBLEFIELD, J.M. (2008), Numerically-based ducted propeller design using vortex lattice lifting
line theory, Master Thesis, Massachusetts Institute of Technology