automated irrigation systemautomated irrigation system chinmay patil1*, divit shetty2, piyush roy3...
TRANSCRIPT
AutomatedIrrigationSystem
ChinmayPatil1*,DivitShetty2,PiyushRoy3
---------------------------------------------------------------------***---------------------------------------------------------------------Abstract-ThisisanautomatedirrigationsystembasedonIoT.Anandroidcontrolledrobotperformstaskslikespraying,obstacledetection,humiditysensingandtemperaturesensing.WiththehelpofIoTwecancontrolthesystemremotelyviaBluetoothandmonitortheconditionsoftheagriculturalfieldwithoutphysicallybeingthere,allthedatafromthesensorsalsocanbeaccessedfromaremotelocation,thusthissystemcanhelp in increasingyieldwithcontinuousmonitoringofcrop.KeyWords:Ultrasonicsensor,Bluetoothmodule,IoT,Temperature sensor, Humidity sensor, Automatedirrigation.1.INTRODUCTIONOneof themainaspectsofhumansurvival is foodwhichindirectly leads to agriculture. In India traditionalagriculturalmethodsarestillbeingusedwhicharequiteinefficient. This problem can be solved by using smartagriculture systems. Introduction of automation inagricultureleadstoefficientcropmonitoringwithoutanyhuman intervention. Overall the design realizes remotemonitoringandcontroloffarmsandhencereducinglabourcost.IoTbasedsystemareusedastheyconnectallthesensor’sdataandsendittoamainserver,whereallthedatacanbecollected and analysed. This data can then be used toimprovetheyieldbymakingallthenecessarychanges.Inthissystem,aroboticvehiclewhichcanbecontrolledbyacellularphonewiththehelpoftheBluetoothmodule.Thesystemisconnectedtoaniotwebpagewhichdisplaysallthenecessarydatainrealtime.Thedatacanbeaccessedfromanyremote locationvia theuseofpropercredentials forprivacy purposes. The system also consists of awirelesscamerastomonitorthesurroundingvisually.Thelivefeedfrom the camera can be monitored with the help of anelectronicdevice.Theroboticvehiclealsohasa temperatureandhumiditysensorwhichisusedtomonitorthedataofthefieldandanalysethepatternforsprayingofwater,alongwiththatanultrasonic sensor which is mounted on the front of thevehicletodetectanyobstaclesandstopsondetectionandabuzzerisusedtoalertthat.
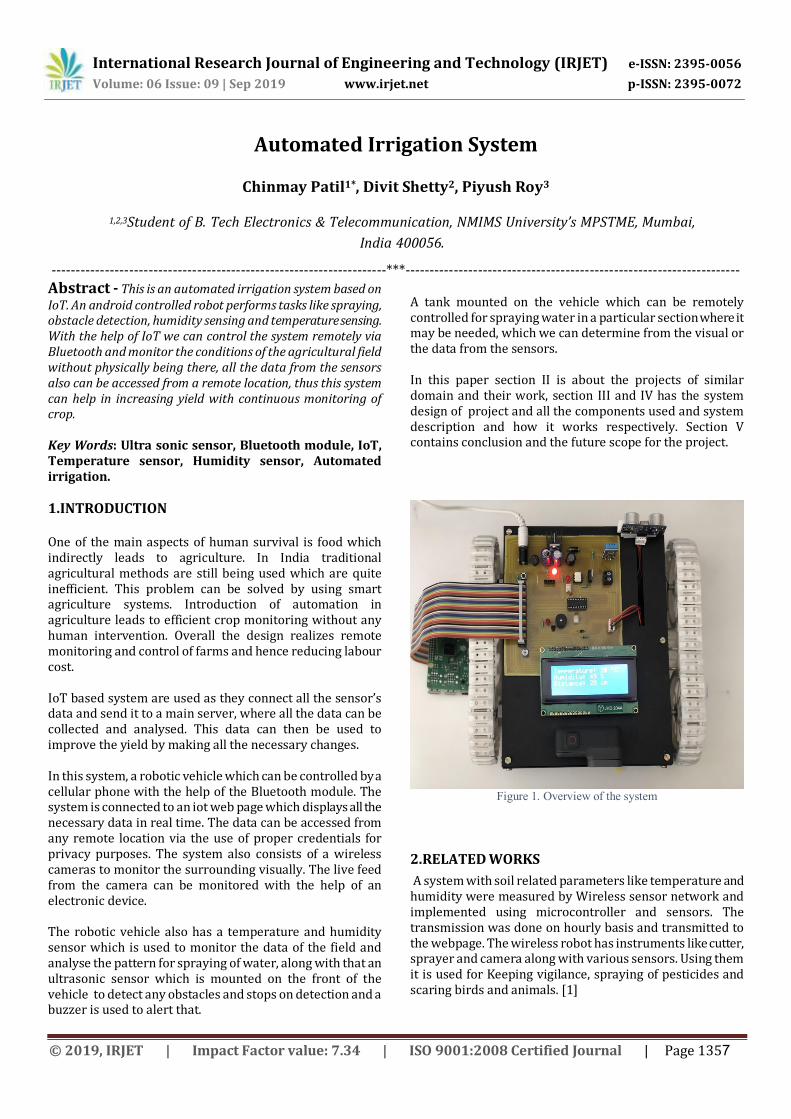
A tank mounted on the vehicle which can be remotelycontrolledforsprayingwaterinaparticularsectionwhereitmaybeneeded,whichwecandeterminefromthevisualorthedatafromthesensors.In this paper section II is about the projects of similardomainand theirwork, section IIIandIVhas thesystemdesignofprojectandallthecomponentsusedandsystemdescription and how it works respectively. Section Vcontainsconclusionandthefuturescopefortheproject.
Figure 1. Overview of the system
2.RELATEDWORKSAsystemwithsoilrelatedparametersliketemperatureandhumidityweremeasuredbyWirelesssensornetworkandimplemented using microcontroller and sensors. Thetransmissionwasdoneonhourlybasisandtransmittedtothewebpage.Thewirelessrobothasinstrumentslikecutter,sprayerandcameraalongwithvarioussensors.UsingthemitisusedforKeepingvigilance,sprayingofpesticidesandscaringbirdsandanimals.[1]
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 06 Issue: 09 | Sep 2019 www.irjet.net p-ISSN: 2395-0072
© 2019, IRJET | Impact Factor value: 7.34 | ISO 9001:2008 Certified Journal | Page 1357
1,2,3Student of B. Tech Electronics & Telecommunication, NMIMS University’s MPSTME, Mumbai,India 400056.
Crops in the early growth stage diseases easily destroyharvest.Asprayingmachinealongwithopticalsensorsfordetectionofvirusesandweedsisusedforthetreatmentofthe crops. During harvesting, the sensors monitored thelarge amount of harvested produce in the harvestingmachine. The data collected is then used in the comingharvestingseasontoimprovetheyield.[2]Thesystemusesthewirelesssensornetworktomonitortheenvironmentalconditionssuchastemperature,soilmoisturecontent, humidity andwater level of agriculture land forcontrolling the irrigation. The system has two modes,automaticandmanual.Thedatacollectedisstoredoncloudserverandusedtoimproveefficiency.Theusercancontrolandoverseethecollecteddatafromremotelocation.[3]A wireless sensor network focuses on and automatedirrigationsystem.Thissystemmonitorsparameterslikesoilmoistureandtemperatureonaregularbasis.Inthisprojectathresholdofsoilmoistureiscontinuouslymaintainedwithanalgorithm,whichstartsorstopstheirrigationsystem.[4]The purpose of thesystem is tomonitor and control thegrowthofplantsinhomegardenbasedonenvironmentalfactors,likesoilmoistureandsurroundingtemperature.Thistechnologycreatesappropriateconditionsforgrowthwhichpreventssubstandardyieldcausedbyweatherchange.Thisirrigation system also makes efficient use of water andfertilizer.[5]Automationinagriculturalfieldsgivesabetteryieldwithoutanyhumanintervention.Theproductivityofcropsdependsgoodirrigationsystem.Tomaintainthecropssensorsareusedtomonitorthemoisturecontentofsoil,andtoprovidewaterautomaticallywhenneeded.GSMtechnologyisusedbytheusertoaccessallthenecessarydata.[6]
3.SYSTEMDESIGN
Figure2.CircuitDiagram
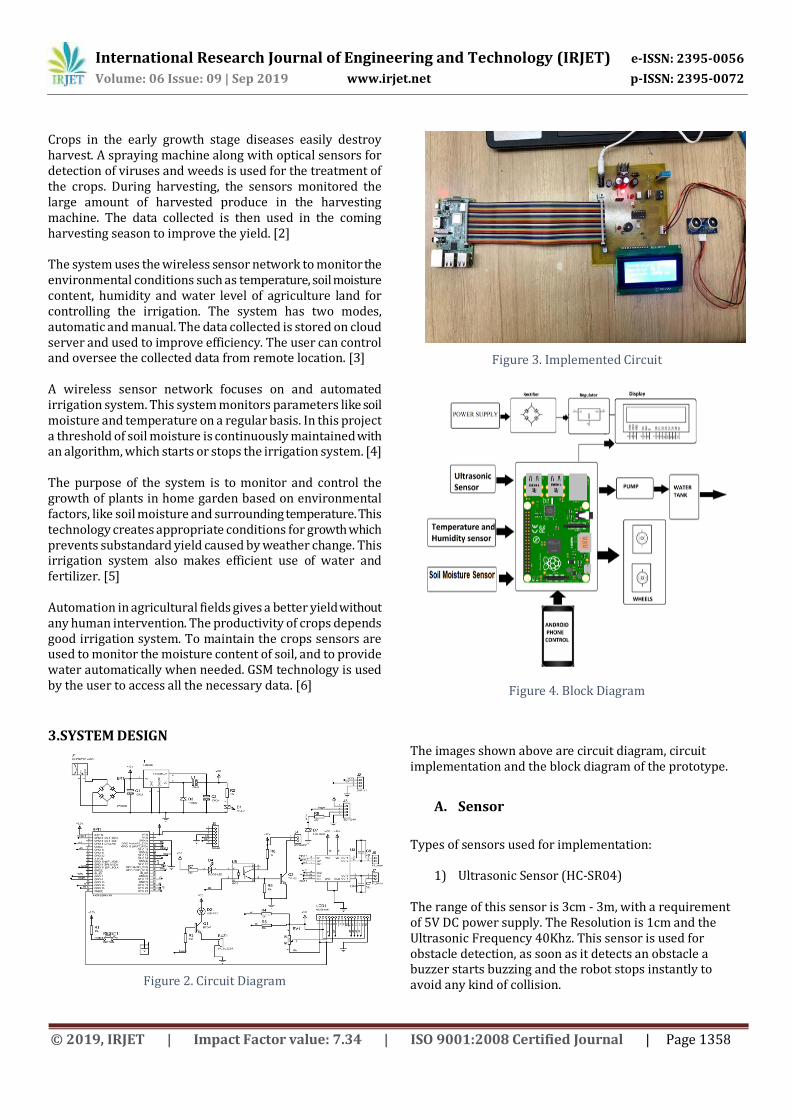
Figure3.ImplementedCircuit
Figure4.BlockDiagram
Theimagesshownabovearecircuitdiagram,circuitimplementationandtheblockdiagramoftheprototype.
A. Sensor Typesofsensorsusedforimplementation:
1) UltrasonicSensor(HC-SR04)
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 06 Issue: 09 | Sep 2019 www.irjet.net p-ISSN: 2395-0072
Therangeofthissensoris3cm-3m,witharequirementof5VDCpowersupply.TheResolutionis1cmandtheUltrasonicFrequency40Khz.Thissensorisusedforobstacledetection,assoonasitdetectsanobstacleabuzzerstartsbuzzingandtherobotstopsinstantlytoavoidanykindofcollision.
© 2019, IRJET | Impact Factor value: 7.34 | ISO 9001:2008 Certified Journal | Page 1358

Figure5.HC-SR04ultrasonicsensor
2) Temperature&HumiditySensor(DHT11)
Thissensoroperatesat3.3Vor5VDCpowersupply.Theresolutionforsensingthetemperatureandhumidityis8bits.Measurementrangeofhumidityis20%-95%RHand0-50°Cforthetemperaturesensor.Thissensorisusedtomeasurethetemperatureandhumidityoftheareaandcollectthedatatobeanalyzed,withallthisdatafurtheractionsareperformed
Figure6.DHT11sensor
B. Motors
Themotorshaveanoperatingvoltageof3-5VDC.Ithasatorqueof1.8Kg-cmthespeedofthemotorswithoutanyloadis0.10sec/60Degree.Rotationalrangeis180degrees.4motorsusedinthisprototypeasweareusingcaterpillartracks,thepurposeofusingthismotorinthevehicleduetooperationinfarmswherethegroundwillbeunevensoastonotgetstuckinthemud.
Figure7.CaterpillarTracks
C. RaspberryPi3B+
TheCPUhasa1.4Ghz64-BitquadcoreARMCortex-A53CPU,andRAMof1GbLPDDR2SDRAM.Itneedsapowerof5VDCtooperate,andsupportsoperatingsystemslikeLinuxandUnix,wecancodethisprocessorbypython. This microprocessor is used as it has goodprocessing power andmemorymanagement,aswehaveconnectedsomanyperipheralandsensorstoprocessallthatdataisatedioustaskforanyotherprocessorthusraspberrypiispreferred.
Figure8.RaspberryPi3B+
D. BluetoothModule(HC-05)Ithasarangeofupto30feet,andoperatesattypically5VDC.ItfollowsIEEE802.15.1whichisastandardprotocolandhasanoperatingcurrentof30mA.Itusesfrequencyhoppingspreadspectrum.Thismoduleisusedtocontroltheprototypebyconnectingittoanandroiddevicefromwherewiththehelpofanappthevehiclecanbecontrolled.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 06 Issue: 09 | Sep 2019 www.irjet.net p-ISSN: 2395-0072
© 2019, IRJET | Impact Factor value: 7.34 | ISO 9001:2008 Certified Journal | Page 1359
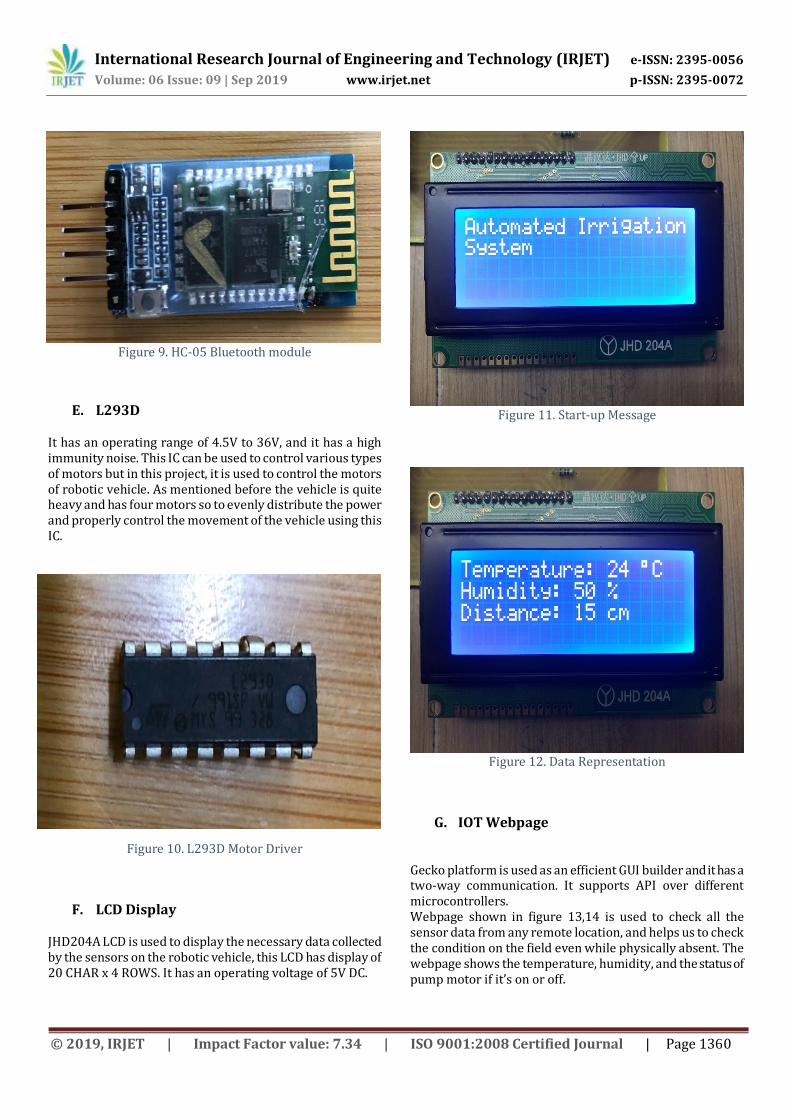
Figure9.HC-05Bluetoothmodule
E. L293DIthasanoperatingrangeof4.5Vto36V,andithasahighimmunitynoise.ThisICcanbeusedtocontrolvarioustypesofmotorsbutinthisproject,itisusedtocontrolthemotorsofroboticvehicle.AsmentionedbeforethevehicleisquiteheavyandhasfourmotorssotoevenlydistributethepowerandproperlycontrolthemovementofthevehicleusingthisIC.
Figure10.L293DMotorDriver
F. LCDDisplayJHD204ALCDisusedtodisplaythenecessarydatacollectedbythesensorsontheroboticvehicle,thisLCDhasdisplayof20CHARx4ROWS.Ithasanoperatingvoltageof5VDC.
Figure11.Start-upMessage
Figure12.DataRepresentation
G. IOTWebpageGeckoplatformisusedasanefficientGUIbuilderandithasatwo-way communication. It supports API over differentmicrocontrollers.Webpage shown in figure 13,14 is used to check all thesensordatafromanyremotelocation,andhelpsustochecktheconditiononthefieldevenwhilephysicallyabsent.Thewebpageshowsthetemperature,humidity,andthestatusofpumpmotorifit’sonoroff.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 06 Issue: 09 | Sep 2019 www.irjet.net p-ISSN: 2395-0072
© 2019, IRJET | Impact Factor value: 7.34 | ISO 9001:2008 Certified Journal | Page 1360

Figure13.IOTGeckowebpage(PumpOff)
Figure14.IOTGeckowebpage(PumpOn)
H. AndroidController
TocontrolthevehicleanappcalledasBluebotisused.Thisapp controls all the movements of the robot-likeforward/backward and left/right, one other importantfunctionofthisappisthatkeyAisusedtoturnon/offthepumpofthetankforsprayingofwater.
Figure15.BluebotAndroidController
4.SYSTEMDESCRIPTIONThesensors,cameraandthewatertankaremountedonthevehicle,whichwillbeusedtoanalyzeandmonitoragivenregionandspraywaterwhereverandwhenevernecessary.Thecameraprovidesalivefeedofthesurroundingwhichcanbemonitoredusingacellulardevice.Thesensorswillbeusedtocollectthetemperatureandhumidityreadingsalongwith obstacle detection. All the data collected from thesensorswillbetransmittedtoanIoTwebpagethroughWi-Fi.
The IoT web page also shows an alert message if anyobstacleisdetectedbytheroverandcanbeaccessedfromany place using the correct credentials. From the dataamassed,itcanbeassessedwhetherthefieldneedstobeirrigatedornot.Thesystemcanbeaccessedfromfar-off,dueto the usage ofWi-Fi. The vehicle is controlled via theBluetoothmodulewhichisconnectedtoanandroidphone.An application calledBluebot is usedwhich controls themovementofthevehicleandsprayingofthewater.
During the testing and debugging phase of the project,certaindrawbacksandlimitationswererealized.Theyareasfollows:
• Thereisadelayofabout5-7secondsdue to thecomplexityofsystem
• Thereisnobackvisibilityasthecameraismountedonthefrontsideoftherover
• Range of theBluetoothmodule is limited due toLineofSight(LoS).
5.CONCLUSIONANDFUTUREWORK
The design and implementation of automated irrigationsystemisdevelopedusingRaspberryPimicrocontroller.Thesystem is cheap and is easy to carry from one place toanotherlimitationofthehardwarebeingassociatedwithasystem has been reduced to a great extent. As an endthought,thesystemwillallowtheusertocontrolitinawaythat reduces thegapbetween thephysicalworldand thedigitalworldwithanoutputmoreintuitive.FUTURESCOPEWithfurthertechnologicalmodificationsthissystemcanbeusedtocoverlargeareasofharvestingland.Improvementslikea rotating360-degreecameraandadditional sensorslikesoilmoisturecanbeaddedtothecurrentsystemwhichwillhelpinincreasingtheefficiencyandprovidingabetteryieldtothefarmer.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 06 Issue: 09 | Sep 2019 www.irjet.net p-ISSN: 2395-0072
© 2019, IRJET | Impact Factor value: 7.34 | ISO 9001:2008 Certified Journal | Page 1361
6.REFERENCES
[1] NikeshGondchawar,Prof.Dr.R.S.Kawitkar,“IoTbased
SmartAgriculture” International JournalofAdvancedResearchinComputerandCommunicationEngineeringVol.5,Issue6,June2016
[2] KishorKumarR,ManjunathBKajjidoni andPradeepKumarMS,“SmartAgricultureSystemUsingIoT”Proc.oftheInt.Conf.onCurrentTrendsinEng.,ScienceandTechnology,ICCTEST
[3] ShwetaB.Saraf,DhanashriH.Gawali,“IoTBasedSmartIrrigationMonitoringAndControllingSystem”20172ndIEEE International Conference On Recent Trends inElectronicsInformation&CommunicationTechnology(RTEICT),May19-20,2017,India
[4] Vaishali S, Suraj S, Vignesh G, Dhivya S andUdhayakumar S, “Mobile Integrated Smart IrrigationManagement and Monitoring System Using IOT”InternationalConferenceonCommunicationandSignalProcessing,April6-8,2017,India
[5] S.N.Ishak,N.N.N.AbdMalik,N.M.AbdulLatiff,N.EffiyanaGhazali and M. A. Baharudin, “Smart Home GardenIrrigationSystemUsingRaspberryPi”2017IEEE13thMalaysiaInternationalConferenceonCommunications(MICC), 28-30 Nov. 2017, The Puteri Pacific, JohorBahru,Malaysia
[6] G.NaveenBalaji,V.Nandhini,S.Mithra,N.PriyaandR.Naveena, “IOTBasedSmartCropMonitoringinFarmLand” Imperial Journal of Interdisciplinary Research(IJIR) Peer Reviewed – International Journal Vol-4,Issue-1,2018(IJIR)ISSN:2454-1362
[7] Tanmay Baranwal, Nitika and Pushpendra KumarPateriya,“DevelopmentofIoTbasedSmartSecurityandMonitoring Devices for Agriculture” 2016 6thInternationalConference-CloudSystemandBigDataEngineering(Confluence)
[8] MdAshifuddinMondalandZeenatRehena,“IoTBasedIntelligentAgricultureFieldMonitoringSystem”20188thInternationalConferenceonCloudComputing,DataScience&Engineering(Confluence)
[9] Prof.K.A.PatilandProf.N.R.Kale,“AModelforSmartAgricultureUsingIoT”2016InternationalConferenceonGlobal Trends in Signal Processing, InformationComputingandCommunication
[10] Amandeep ,ArshiaBhattacharjee ,PaboniDas,Debjit
Basu,SomuditRoy,SpandanGhosh,SayanSaha,SouvikPainandSouravDey,“SmartFarmingUsingIOT”20178thIEEEAnnualInformationTechnology,ElectronicsandMobileCommunicationConference(IEMCON)
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 06 Issue: 09 | Sep 2019 www.irjet.net p-ISSN: 2395-0072
© 2019, IRJET | Impact Factor value: 7.34 | ISO 9001:2008 Certified Journal | Page 1362