author's personal copy - school of...
TRANSCRIPT

This article appeared in a journal published by Elsevier. The attachedcopy is furnished to the author for internal non-commercial researchand education use, including for instruction at the authors institution
and sharing with colleagues.
Other uses, including reproduction and distribution, or selling orlicensing copies, or posting to personal, institutional or third party
websites are prohibited.
In most cases authors are permitted to post their version of thearticle (e.g. in Word or Tex form) to their personal website orinstitutional repository. Authors requiring further information
regarding Elsevier’s archiving and manuscript policies areencouraged to visit:
http://www.elsevier.com/authorsrights

Author's personal copy
Finite element model updating of the UCF grid benchmarkusing measured frequency response functions
Jesse D. Sipple a, Masoud Sanayei b,n
a Formerly a graduate student at Tufts University; BDI Testing and Analysis Engineer, Bridge Diagnostics Inc., Boulder, CO 80301, USAb Professor, Department of Civil and Environmental Engineering, Tufts University, 200 College Avenue, Medford, MA 02155, USA
a r t i c l e i n f o
Article history:Received 21 February 2013Received in revised form6 January 2014Accepted 15 January 2014Available online 2 February 2014
Keywords:Frequency response functionParameter estimationFinite element model updatingOptimizationAcceleration measurementsSmall scale benchmark structure
a b s t r a c t
A frequency response function based finite element model updating method is presentedand used to perform parameter estimation of the University of Central Florida GridBenchmark Structure. The proposed method is used to calibrate the initial finite elementmodel using measured frequency response functions from the undamaged, intactstructure. Stiffness properties, mass properties, and boundary conditions of the initialmodel were estimated and updated. Model updating was then performed using measuredfrequency response functions from the damaged structure to detect physical structuralchange. Grouping and ungrouping were utilized to determine the exact location andmagnitude of the damage. The fixity in rotation of two boundary condition nodes wasaccurately and successfully estimated. The usefulness of the proposed method for finiteelement model updating is shown by being able to detect, locate, and quantify change instructural properties.
& 2014 Elsevier Ltd. All rights reserved.
1. Introduction
Parameter estimation using finite element model updating is a valuable tool in the field of structural health monitoringto assist in the challenges presented as our infrastructure continues to age. Frequency response functions (FRFs) provide adynamic signature of the structure over a given frequency range. The FRF contains information about the stiffness, mass, anddamping properties of the structure. Updating an a priori finite element model (FEM) so that the analytical FRFs match themeasured FRFs provides engineers with an estimate of actual structural properties and possible damage. Insight into thefundamental principles of the field of structural health monitoring can be found in Farrar and Worden [1] and Mottersheadand Friswell [2]. Literature surveys dealing specifically with FRFs for finite element model updating can be found in Li andHong [3], Pradhan and Modak [4] and Rahmatalla et al. [5].
The most commonly used method in FRF finite element model updating, as stated in Lin and Zhu [6], is the responsefunction method (RFM) established in Lin and Ewins [7]. The RFM was tested in Imregun et al. [8] by using a small scalestructure and actual measured damage scenarios. The results in Imregun noted that the RFM would require considerablecomputational power when the FEM is large. Imregun states that the RFM was successful because of the large number ofmeasurements compared to the number of degrees of freedom and because only a select number of frequency points wereincluded in the model updating. More recently, Pradhan and Modak [9] described modifying the RFM to use complex FRFsbut still requiring the use of element stiffness and mass matrices with analytical sensitivities to solve the problem.
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/ymssp
Mechanical Systems and Signal Processing
0888-3270/$ - see front matter & 2014 Elsevier Ltd. All rights reserved.http://dx.doi.org/10.1016/j.ymssp.2014.01.008
n Corresponding author. Tel.: þ1 617 627 2281.E-mail address: [email protected] (M. Sanayei).
Mechanical Systems and Signal Processing 46 (2014) 179–190
Author's personal copy
Other analytical sensitivity based methods for FRF model updating can be found in Asma and Bouazzouni [10] andEsfandiari et al. [11], which both use analytical sensitivities of the elements stiffness and mass matrices to determinedamage. Most of the methods presented in the literature are based on analytical sensitivities to solve the inverse problem.The requirements of these methods such as model reduction, data expansion, use of limited number of frequency pointsfrom the FRF, and requiring access to element stiffness and mass matrices place limitations when performing modelupdating for parameter estimation on large complex structures. The proposed method tries to overcome these limitations.
2. FRF-based finite element model updating
The method presented in this paper provides a new and unique solution for solving the inverse problem throughparameter estimation. First, an a priori FEM of the structure is created using a commercially available finite elementprogram. Then mode shapes and natural frequencies are calculated using the finite element modeling program and are usedto create analytical FRFs at selected locations. This particular form of analytical FRFs uses a reduced subset of modes,eliminating the need for higher modes which do not influence the FRFs in the lower frequency ranges of interest. Theanalytical FRF is also inherently a function of the structural parameters that comprise the finite element model. Once theanalytical FRF is created, a residual is calculated using measured FRFs. The inverse problem is then solved using numericalsensitivities to minimize the residual by modifying the structural parameters of unknown elements in the FEM. This in turnchanges the analytical FRFs and the process continues until a minimum is reached and updated structural parameters havebeen determined. Several techniques have also been developed to aid in ensuring an accurate solution and will be discussedthroughout the paper. A key benefit of this method is that it is independent of the size of the structure after calculation ofmodal parameters, does not require direct access to elemental stiffness or mass matrices for parameter estimation, and isstill able to determine elemental properties through changes in the FRFs.
2.1. FRF used in parameter estimation
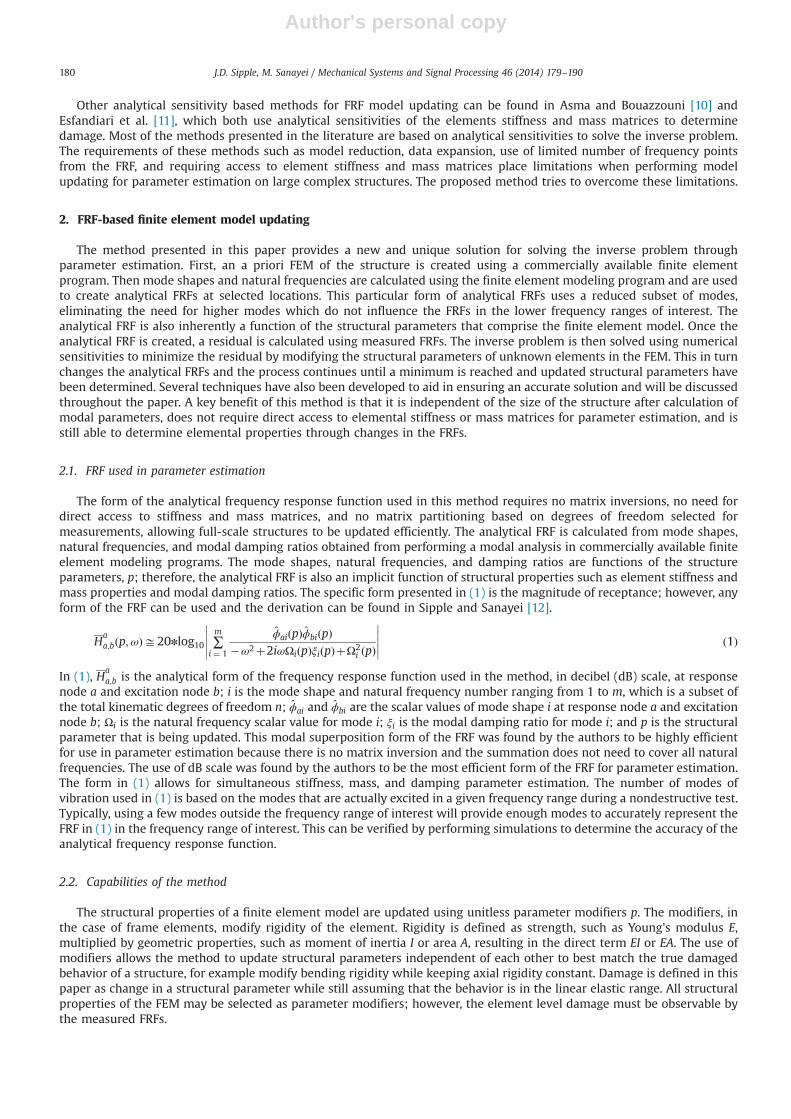
The form of the analytical frequency response function used in this method requires no matrix inversions, no need fordirect access to stiffness and mass matrices, and no matrix partitioning based on degrees of freedom selected formeasurements, allowing full-scale structures to be updated efficiently. The analytical FRF is calculated from mode shapes,natural frequencies, and modal damping ratios obtained from performing a modal analysis in commercially available finiteelement modeling programs. The mode shapes, natural frequencies, and damping ratios are functions of the structureparameters, p; therefore, the analytical FRF is also an implicit function of structural properties such as element stiffness andmass properties and modal damping ratios. The specific form presented in (1) is the magnitude of receptance; however, anyform of the FRF can be used and the derivation can be found in Sipple and Sanayei [12].
Haa;bðp;ωÞffi20nlog10 ∑
m
i ¼ 1
ϕ̂aiðpÞϕ̂biðpÞ�ω2þ2iωΩiðpÞξiðpÞþΩ2
i ðpÞ
�����
����� ð1Þ
In (1), Haa;b is the analytical form of the frequency response function used in the method, in decibel (dB) scale, at response
node a and excitation node b; i is the mode shape and natural frequency number ranging from 1 to m, which is a subset ofthe total kinematic degrees of freedom n; ϕ̂ai and ϕ̂bi are the scalar values of mode shape i at response node a and excitationnode b; Ωi is the natural frequency scalar value for mode i; ξi is the modal damping ratio for mode i; and p is the structuralparameter that is being updated. This modal superposition form of the FRF was found by the authors to be highly efficientfor use in parameter estimation because there is no matrix inversion and the summation does not need to cover all naturalfrequencies. The use of dB scale was found by the authors to be the most efficient form of the FRF for parameter estimation.The form in (1) allows for simultaneous stiffness, mass, and damping parameter estimation. The number of modes ofvibration used in (1) is based on the modes that are actually excited in a given frequency range during a nondestructive test.Typically, using a few modes outside the frequency range of interest will provide enough modes to accurately represent theFRF in (1) in the frequency range of interest. This can be verified by performing simulations to determine the accuracy of theanalytical frequency response function.
2.2. Capabilities of the method
The structural properties of a finite element model are updated using unitless parameter modifiers p. The modifiers, inthe case of frame elements, modify rigidity of the element. Rigidity is defined as strength, such as Young's modulus E,multiplied by geometric properties, such as moment of inertia I or area A, resulting in the direct term EI or EA. The use ofmodifiers allows the method to update structural parameters independent of each other to best match the true damagedbehavior of a structure, for example modify bending rigidity while keeping axial rigidity constant. Damage is defined in thispaper as change in a structural parameter while still assuming that the behavior is in the linear elastic range. All structuralproperties of the FEM may be selected as parameter modifiers; however, the element level damage must be observable bythe measured FRFs.
J.D. Sipple, M. Sanayei / Mechanical Systems and Signal Processing 46 (2014) 179–190180

Author's personal copy
Link elements, springs with six degrees of freedom, are used to model boundary conditions instead of the simpler as pin,roller, or fixed boundary condition. Some modifications were made to the updating because the range of boundary stiffnesscan change several orders of magnitude, while the modifiers for structural element properties are typically in the rangefrom 0 to 2. To overcome this difference in scales, the updating of link elements is performed on a log scale scaled betweenthe values of 0.1 and 2. The bounds of the optimization are set to include the desired range of link stiffness values; that rangeis then scaled down, and during the optimization process steps through that range on a logarithm scale. This ensures thatthe entire range of boundary values is evenly considered during the parameter estimation.
2.3. Model updating mathematics
The FRF form in (1) is used for parameter estimation and FE model updating. Stacking may be used to include multipleFRFs, which is typically the case for parameter estimation using FRFs in order to ensure observability of the possible damagelocation by the measured FRFs in (2). The only requirement when stacking is that the frequency range be the same betweeneach analytical and measured FRF pair.
Hðp;ωÞ ¼Ha;bðp;ωÞ⋮He;f ðp;ωÞ
8>><>>:
9>>=>>;
ð2Þ
Parameter estimation via finite element model updating is solved using the inverse problem. The first step in the processis to create an error function using the stacked FRFs in (2). This error function is the difference between the analytical andmeasured FRFs. This FRF-based error function, shown in (3), is a function of both the frequency range of interest, ω, and theparameters that are being updated, p.
feðp;ωÞg ¼ fHaðp;ωÞg�fHmðωÞg ð3ÞThe superscript a in (3) denotes the analytical FRF and the superscript m denotes the measured FRF. A least-squares scalarobjective error function J is created in (4). The value of J is minimized through bounded numerical optimization in (5).
JðpÞ ¼ feðp;ωÞgT feðp;ωÞg ð4Þ
minðJðpÞÞ-0 3 pllopopul ð5ÞThe quantities pll and pul are the lower and upper bounds of the numerical optimization. These bounds of parametermodifiers are set to allow for the updating method to explore all possible values within a practical limit.
The scalar objective error function is normalized at each iteration i in (6) by the initial value of the scalar objective errorfunction JðpÞ1 so that the optimization starts at a value of 1 and as the match gets closer the values approaches 0. Thisnormalization also allows for the scalar objective function value to be unitless.
JðpÞi ¼JðpÞiJðpÞ1
ð6Þ
The convergence limits shown in (7) and (8) are set to reasonable values for the numerical optimization stop. Since theparameter p is a unitless modifier, the Δp convergence limit translates to a change of one hundredth of a percent in themodifier. The use of unitless modifiers and a unitless scalar objective error function value allow for the entire optimizationto be performed independent of units and within reasonable magnitudes, which ensure successful optimization.
Δpo1� 10�4 ð7Þ
ΔJo1� 10�8 ð8ÞTo perform the bounded numerical optimization, the updating parameters and scalar objective error function (6) are
supplied to optimization routines in the MATLAB Optimization Toolbox [13]. The goal of the numerical optimization is tominimize the J value, by changing the parameters, which results in the best match between measured and analytical FRFs.For this iterative process to be successful, parameters modifiers are determined by the optimization routine andautomatically passed to SAP2000 [14]. A modal analysis is performed, and the modal parameters of mode shape andnatural frequencies are automatically passed back to MATLAB, where the FRF is calculated and the next set of parameters isdetermined. This process iterates until the convergence limits in (7) and (8) are satisfied.
The parameter modifiers can pass seamlessly between the two programs using the application programming interface(API) which allows the two programs to communicate directly. Most commercially available software programs allowexchange of information through APIs making this method applicable to a wide range of software packages.
The optimization technique used in this paper was a constrained nonlinear minimization, fmincon, which is available inthe MATLAB Optimization Toolbox. In addition to the use of fmincon, multiple start points were used to ensure that theglobal minimum was reached. The global minimum can be seen with repeated answers in the final output.
The numerical, iterative method to solve the inverse problem is one of the distinct advantages of this method, allowingfor simplicity in the formulation. This allows for different optimization techniques to be used depending on which is best
J.D. Sipple, M. Sanayei / Mechanical Systems and Signal Processing 46 (2014) 179–190 181

Author's personal copy
suited to solve the problem. Another advantage is that direct access to system stiffness and mass matrices is not requiredwhich allows for the model to be as complex as it needs to be to accurately capture structural behavior. Also, no matrixinversions are used in (1), reducing the possibility of magnification of modeling or measurement errors. This method alsodoes not require any model reduction or data expansion and is elegantly simple to implement and yet powerful forparameter estimation due to the combination of advanced modeling and optimization techniques.
A technique to overcome modeling error is applied in this paper. Typically, for parameter estimation using modelupdating a finite element model is created based on either construction or as-built drawings. This allows engineers to get amodel that most realistically represents the structure as designed. However, the actual behavior of the as-built structuremay differ from the behavior assumed when creating the finite element model. Calibration of this initial finite elementmodel using measurements from the intact, undamaged structure will show any incorrect assumptions made during itscreation. This will also make the model truly represent the undamaged structure and reduce modeling error. Modelcalibration allows for modeling errors to be mitigated so they do not appear as false damage scenarios when performingparameter estimation.
Accuracy of the results can be determined using two methods. The first method is to visually examine the matchbetween analytical estimated and measured FRFs. A close match between these two suggests that the update was successful.One also considers that the estimated parameters are logical and make engineering sense. The second, more quantitative,method uses the frequency domain assurance criterion (FDAC) which is presented in Pascual et al. [15] and is similar to MACand COMAC in that the values can range from 0 to 1 with 0 being no match and 1 being a perfect match. The FDAC considersall the frequency values in all the FRFs used in parameter estimation and gives insight into the relationship between them.For a more concise analysis of the results, only the diagonal values of the FDAC matrix are presented, which shows directlyhow all the estimated and measured FRFs compare to each other. For all model updating methods, the estimated parametersmust be meaningful and in acceptable ranges from the engineering judgment point of view.
3. UCF grid benchmark structure
The University of Central Florida (UCF) Grid Benchmark was constructed under the guidance of Catbas [16]. As stated inCatbas et al.[17], the structure serves as a test bed for model updating procedures. It was designed and constructed so thatthe structural response, including the dynamic response, was similar to that of the typical workhorse, short-to-medium-span, highway bridges. The damage scenarios applied to the bridge were also developed with multiple state DOTs torepresent realistic bridge damage scenarios. In looking at small scale testing structures, the UCF grid structure is a suitabletest bed to test the FRF-based FE model updating method.
Details of the design and construction of the UCF grid are found in Burkett [18] and summarized here. The UCF grid,shown in Fig. 1, has two clear spans, each with a length of 2.74 m (9 ft), as seen in Fig. 4. While the photo in Fig. 1 is a generalphoto showing the experimental setup for the UCF grid, and includes both an actuator and a hammer, only the impacthammer data was used in this paper. The longitudinal beams are continuous, running the whole length of the structure. Thetransverse beams connect to the longitudinal beams with both shear and moment connectors, providing a partiallyrestrained connection. Both longitudinal and transverse beams are S3�5.7 sections. The columns are W12�26 sections andhave a length of 7.32 m (24 ft). All structure elements were modeled as steel with a Young's modulus E of 200 GPa(29,000 ksi). The physical boundary condition was a scalloped plate with a round bar to simulate the roller connection, withbolts being placed through that connection for the pin, allowing rotation but not translation. The boundary conditions weredesigned so that the nodes 1, 4, 8, and 11 are rollers with releases in the x-translation, y-rotation, and z-rotation directions.Nodes 7 and 14 were designed as pin connections, having releases in the y-rotation and z-rotation.
The structure was instrumented with 14 accelerometers, as shown in Fig. 1, with one at each intersection betweenlongitudinal and transverse members. The structure was excited with an impact hammer and the FRFs were collected usingan analyzer. More details about the structure, data acquisition, and testing methods can be found in Burkett [18], Catbaset al. [17], and Gul and Catbas [19].
Fig. 1. Setup of UCF grid testing [18].
J.D. Sipple, M. Sanayei / Mechanical Systems and Signal Processing 46 (2014) 179–190182

Author's personal copy
3.1. Description of FEM
The finite element model was created based on design calculations and drawings of the UCF grid structure in Burkett[18]. An extruded view of the finite element model along with the coordinate system is shown in Fig. 2; it should be notedthat the structural shapes are shown only for illustration. As shown in Fig. 2, the longitudinal, transverse, and supportmembers are modeled as frame elements with their respective structural properties based on structural shape dimensions.Stiffnesses of the connection members were determined using calculations from Burkett, and additional mass was added tothe structure for weight of connections, accelerometers, and miscellaneous hardware. A mesh refinement study wasperformed by the authors in order to determine the correct discretization of frame elements since the finite elementmodeling program uses lumped mass modeling as opposed to distributed mass modeling. The boundary conditions at thebase of the support columns, W12�26, are modeled as a fixed condition. The connections between the grid and the supportmembers were modeled using link elements, referred to as boundary links. The six stiffness values of the boundary links canbe adjusted to accurately represent the boundary conditions. A sensitivity study was also performed and a total of 20 modeswere included in the formulation in (1), which was sufficient for the frequency range of interest.
The geometry of the structure is modeled as accurately as possible to ensure the best a priori finite element model formodel calibration and subsequent parameter estimation. To achieve the correct geometry, rigid link elements are used tosimulate the connection between the grid and support columns, which are attached a distance away from the neutral axis ofthe structural members. The length of the boundary link provided the correct distance between the top of the supportcolumn and the bottom of the grid member.
3.2. Boundary stiffness sensitivity study
A sensitivity study was performed to determine the range for boundary link elements. Fig. 3 shows an example from thestudy where the horizontal boundary stiffness kX is varied and the horizontal displacement is found as a function of thestiffness value. Three different regions for boundary condition stiffness are shown ranging from a free to partially restrainedto a fixed boundary condition. This study was performed for all active boundary stiffness directions and is summarized inTable 1, showing boundary stiffness ranges found for this structure for free, partially restrained, and fixed conditions.
Rigid Link
Boundary Link (X, Z, θY)
W12x26
S3x5.7Connection Elements
Fixed Connection (Typ.)
XY
Z
Fig. 2. Description of UCF grid FEM.
Fig. 3. Sample boundary stiffness sensitivity analysis for horizontal stiffness kX.
J.D. Sipple, M. Sanayei / Mechanical Systems and Signal Processing 46 (2014) 179–190 183

Author's personal copy
3.3. Observability of unknown parameters
Observability of a change in the frequency response function to a change in the structural parameter must be consideredfor parameter estimation to be successful. Since the structure uses one-dimensional frame elements and was allowed toexhibit 3D behavior, the FE model was studied to ensure that the parameters to be updated caused the analytical FRFs tochange, therefore being observable. Model updating was not performed on parameters such as weak axis bending rigidity,shear rigidity, and axial rigidity because of their low or no observability. Boundary link elements that were not observablesuch as translation in the y-direction and x- and z-rotation, were also not included as unknown parameters. Modal dampingratios were directly obtained from the test data and are in the range of 0.2–1.5% but were not investigated as structuralparameters in this study.
Parameters that are included in parameter estimation due to their observability are strong axis bending rigidity for mainstructural members and connection members, mass for main structural members and connection members, and boundarylink stiffnesses kX, kY, and kθY.
4. FRF-based FE model updating of the UCF grid
The test plan for the structure consisted of four vertical impact locations (at nodes 3, 6, 9, 12) with 14 vertical accelerationresponse measurement locations (at nodes 1–14), resulting in 56 measured FRFs. In this paper, a reduced set of FRFs will beused in the updating, as shown in Fig. 4. Only two excitation, or impact, locations (at nodes 3 and 12) and 14 responselocations are used as the reduced set for a total of 28 measured FRFs. The sample FRFs shown following each model updatingcase will be shown for response a at node 6 due to excitation b at node 3, denoted by H6;3. A control group, measured FRFsnot used in the updating, is used to determine the success of the method. In this, the updated FRF is compared with themeasured FRF from the unused data. The sample FRF from the control group will be shown for response a at node 2 due toexcitation b at node 9, denoted by H2;9:
Two FE model updating scenarios are presented. Case A is model calibration of the a priori model and Case B is parameterestimation to detect a physical change in the structure. The damage location for Case B is known prior to the updating;however, the damage was treated as unknown to the method. Grouping and ungrouping to detect, locate, and quantify thechange in structural parameters are utilized to aid in the model updating process.
4.1. Case A – model calibration
For Case A, all major structural properties were treated as unknown. Since the longitudinal and transverse beams havethe same member properties, both of those elements were included in one group for both stiffness and mass estimation.Grouping is a technique used that assigns all of the structural parameters in one group of the same modifier. The use of
Table 1Results of boundary stiffness sensitivity analysis.
Boundary stiffness ranges
Stiffness direction Free Partially restrained Fixed
kX (N/m) 0 to 2�107 2�107 to 2�109 2�109þkZ (N/m) 0 to 5�104 5�104 to 2�109 2�109þkθY (rad/m) 0 to 4�105 4�105 to 4�1010 4�1010þ
Fig. 4. Node numbers and excitation/response locations.
J.D. Sipple, M. Sanayei / Mechanical Systems and Signal Processing 46 (2014) 179–190184

Author's personal copy
grouping allows for fewer unknowns in the optimization process and makes engineering sense since typically members in agroup have the same structural properties. The connections were grouped together for stiffness and mass as well, leading tofour unknowns for the structural members. The boundary conditions were grouped by their behavior as designed. Thestiffness values for all boundary links in the vertical (z-direction) were put into one group, kZ all. The stiffness values forroller boundary links in the horizontal (x-direction) were put into another group, kX roller. The stiffness values for pinboundary links in the horizontal (x-direction) were put into a third group, kX pin. The final boundary link group was the y-rotation group for all boundary links, kθY all. Four groups from member mass and stiffness plus the four boundary stiffnessgroups result in a total of eight unknowns for the model calibration case. The frequency range used in updating was from 20to 120 Hz since that was the range of the measured FRF. The model used was the uncalibrated FEM.
The results from the model calibration are shown in Figs. 5 and 6. Fig. 5 and all subsequent results graphs show the initialparameter values as well as the parameter estimates found through FRF-based FE model updating. Although the results aredisplayed in two separate graphs, the parameter estimation was performed simultaneously in both cases presented in thispaper. For Case A the initial parameter values were chosen so that the model parameters were that of the uncalibrated finiteelement model.
Fig. 5(a) shows the stiffness and mass parameter modifiers and Fig. 5(b) shows the actual stiffness values of the boundarylink elements. The graphs in Fig. 5(a) show that there was no real change in the stiffness of the longitudinal and transversemember group. There was a reduction, 16%, in the connection stiffness; however, this was expected since the connectionmay not be as strong as it was calculated due to tolerances and assembly. The mass of the longitudinal and transversemembers was reduced by only 8% and the mass of the connection group remained essentially unchanged. These slightvariations in the stiffness and mass of the longitudinal, transverse, and connection members were expected in modelcalibration.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
Mod
ifier
(uni
tless
)
Member Group
Initial Guess Estimate
1.E+00
1.E+02
1.E+04
1.E+06
1.E+08
1.E+10
All Roller(1, 4, 8,
11)
Pin(7, 14)
All
kZ(N/m)
kX (N/m) kθY (rad/m)
Stiff
ness
Boundary Node Group
Initial Guess Estimate
Fig. 5. Case A results for (a) parmater modifiers and (b) boundary stiffness values.
Fig. 6. Case A sample FRFs for response at node 6 due to excitation at node 3.
J.D. Sipple, M. Sanayei / Mechanical Systems and Signal Processing 46 (2014) 179–190 185

Author's personal copy
The more interesting results were regarding the assumptions of the boundary conditions in the model as shown in Fig. 5(b). Stiffness for the kZ all group was reduced, but only changed from fully fixed to partially restrained. Stiffness of the kXroller group was increased from free to partially restrained. Stiffness of the kX pin group was decreased from fixed topartially restrained, yet remained slightly higher than the roller stiffness. This change in both horizontal stiffness groupscould indicate that the boundary conditions were not as free to translate as designed and the full translation fixity of thepinned connection may not have been achieved. The kθY all group remained unchanged as a free condition.
A sample FRF used in the updating is shown in Fig. 6. In this figure and all subsequent sample FRFs the initial, estimated,and measured FRFs are shown. Fig. 6 shows that the uncalibrated model matched well with the measurements in the lowerfrequency range; however, improvement with the calibrated model can be seen in the higher frequency range, beyond60 Hz. Visually comparing the calibrated model with the measured data shows no significant difference between FRFs,suggesting that the calibration was successful in updating the properties of the finite element model so that the responsematches that of measured data.
Using a more qualitative analysis of the results, Fig. 7 shows the diagonal values of the FDAC. There are two lines shownin Fig. 7, one being diagonal FDAC values between the uncalibrated FEM's response and measured FRFs from the undamagedstructure, and the second being diagonal FDAC values between the calibrated FEM's response and the undamaged FRFmeasurements. There has been a significant increase in FDAC values from the uncalibrated to the calibrated model. Mostvalues are above 0.8, while a majority of those values are above 0.9. There are lower diagonal FDAC values from 70 to 90 Hz;however, in looking at the FRF in Fig. 6, it can be observed that this portion of the data may contain measurement noise ormeasured modes that were not observed in the FE model. No coherence values were available with the data, so thisobservation cannot be fully verified.
Since not all 56 FRFs were used in the updating, Fig. 8 shows how data not used in the updating compares well with themodel updating that was performed. This set of unused FRFs can be thought of as a control group for verifying that themodel updating was performed correctly. The close match in Fig. 8 is the same as the match between the updated andmeasured FRFs in Fig. 6, even though the measured data was not used for the updating.
Frequency [Hz]
Dia
gona
l of F
DA
C [u
nitle
ss]
Uncalibrated vs. Measured - UndamagedCalibrated vs. Measured - Undamaged
Fig. 7. Diagonal values of FDAC for Case A – model calibration.
Frequency [Hz]
H2,
9[1
/kg]
(dB
)
CalibratedEstimated - DamagedMeasured - Damaged
Fig. 8. Case A control group sample FRF for response at node 2 due to excitation at node 9.
J.D. Sipple, M. Sanayei / Mechanical Systems and Signal Processing 46 (2014) 179–190186

Author's personal copy
A review of the results confirms that the calibration of the FEM was a success. The values make engineering sense andthe calibrated FRF matches well with the measured FRFs from the undamaged structure. Qualitatively, the FDAC confirmswhat is seen by looking at the FRFs, showing there is a significant improvement from the uncalibrated to the calibratedmodel. During the numerical optimization process, as is the same for all cases, multiple start points were used and theglobal minimum was verified by the optimization reaching the same solution multiple times. This calibrated FEM was usedas the base model in the next parameter estimation case.
4.2. Case B – damage detection
Case B was treated as a “blind” damage scenario while the true damage is fixing the y-rotation of nodes 7 and 14. Themodel and initial parameters used for parameter estimation was the calibrated FEM from Case A. Techniques of groupingand ungrouping as explored in Hjelmstad [20] were utilized to detect, locate, and quantify the change in structuralparameters. The initial unknowns were the same from Case A, a total of eight unknowns being the structural properties thatinfluence the behavior of the structure. The frequency range used in updating was again 20–120 Hz.
The initial results from the grouped parameter estimation are presented in Figs. 9 and 10. Fig. 9(a) shows that there areslight changes from the calibrated model for mass and stiffness of the longitudinal and transverse members as well as theconnection. The most significant change is a 30% change in the connection member stiffness. Examing the boundarystiffness in Fig. 9(b), there are also significant changes in stiffness in both kX pin and kθY all groups.
Observing the resulting FRF from the initial parameter estimation in Fig. 10, it is obvious that the damage has not beenaccurately detected since the estimated FRF does not match with measured frequency response function.
Interpreting these results, there are three sets of groups that show significant change: the first being the stiffness of allconnection elements, the second being kX pin group, and the third being kθY all group. Since there are two sets of
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
Mod
ifier
(uni
tless
)
Member Group
Initial Guess Estimate
1.E+00
1.E+02
1.E+04
1.E+06
1.E+08
1.E+10
All Roller(1, 4, 8,
11)
Pin(7, 14)
All
kZ(N/m)
kX (N/m) kθY (rad/m)
Stiff
ness
Boundary Node Group
Initial Guess Estimate
Fig. 9. Case B initial results for (a) element parameter modifiers and (b) boundary stiffness values.
Frequency [Hz]
H6,
3[1
/kg]
(dB
)
CalibratedEstimated - DamagedMeasured - Damaged
Fig. 10. Case B initial sample FRF for response at node 6 due to excitation at node 3.
J.D. Sipple, M. Sanayei / Mechanical Systems and Signal Processing 46 (2014) 179–190 187

Author's personal copy
parameters that show possible damage, connection member stiffness and boundary link stiffness, boundary links wereungrouped first. If damage is not detected in boundary links through that ungrouping, the connection members will beungrouped as well. The reuslts from Figs. 9 and 10 show that the parameter estimation has not been completed.
Based on the observations from the initial grouped parameter estimation, the kX pin group and kθY all group wereungrouped for the first attempt at detecting, locating, and quantifying the damage. The results of this simultaneousparameter estimation with a total of 14 unknown stiffness and masses are shown in Fig. 11. First, in looking at the boundarystiffness values that were ungrouped in Fig. 11(b), there is an obvious change kθY for nodes 7 and 14 while the other nodesremain unchanged. The magnitudes of the resulting rotational stiffness suggest that nodes 7 and 14 are fixed while the othernodes remain free, which matches the actual damage applied to the structure. Also shown in Fig. 11(b) there is also anincrease in kX for nodes 7 and 14, suggesting that when the boundary conditions were fixed in rotation, it also had the effectof making the connections behave more like pins than they did before the damage was applied. Reviewing the stiffness andmass of the structural members and connections in Fig. 11(a), there is a slight increase but no more than 10%. This slightincrease in mass and stiffness values can be due to modeling and measurement error and would not be consideredsignificant damage. It should also be noted that the significant change of the connection member stiffness parameter groupin Fig. 9(a) is no longer present in Fig. 11(a) after ungrouping of the support boundary links and can therefore be viewed as afalse positive. The connection member stiffness was intially estimated as damage due to modeling errors in boundarystiffnesses because the grouping did not allow the correct damaged parameters to be detected, essentially introducingmodeling error. Therefore ungrouping of the connection member stiffness was no longer necessary since it is no longerviewed as a possible damage location.
Comparing the resulting FRFs in Fig. 12, there is a great match between estimated and measured FRFs from theungrouped parameter estimation and the measured FRF, confirming that the parameter estimation was performedsuccessfully. It is observed that there may be a mode that is not captured by the model around 75 Hz, or this couldpossibly be measurement error since possible measurement noise was observed in this region during the calibration runs.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
Mod
ifier
(uni
tless
)
Member Group
Initial Guess Estimate
1.E+00
1.E+02
1.E+04
1.E+06
1.E+08
All
1, 4
, 8, 1
1 7 14 1 4 7 8 11 14
kZ(N/m)
kX (N/m) kθY (rad/m)
Stiff
ness
Boundary Node Group
Initial Guess Estimate
Fig. 11. Case B final results for (a) parmater modifiers and (b) boundary stiffness values.
Frequency [Hz]
H6,
3 [1
/kg]
(dB
)
CalibratedEstimated - DamagedMeasured - Damaged
Fig. 12. Case B final sample FRF for response at node 6 due to excitation at node 3.
J.D. Sipple, M. Sanayei / Mechanical Systems and Signal Processing 46 (2014) 179–190188

Author's personal copy
Fig. 13 provides quantitative insight into the results from the parameter estimation scenarios. The dotted line shows thecalibrated model compared with measurements from the damaged structure. The initial grouped estimate compared withmeasurements from the damaged structure and the final ungrouped estimate compared with measurements from thedamaged structure are shown for completeness. The final ungrouped data shows a significant improvement over both theinitial parameter estimation run and the calibrated, undamaged case. There is a region from 60 to 100 Hz where the FDACvalues are below 0.80, but this again could be due to measurement noise or a missing mode in the model.
As was the scenario for Case A, only one-half of the 56 measured FRFs were used in model updating. Fig. 14 shows howthe FRFs not used in the updating compare with the model updating that was performed. Again the match between theestimated analytical and measured FRFs that were not used in the updating is excellent.
4.3. Summary of results
Parameter estimation was performed using the FRF-based FE model updating method for both model calibration anddamage detection. The cases presented here prove that is possible to accurately detect, locate, and quantify change instructural parameters using a calibrated a priori finite element model and measured frequency response functions.The uncalibrated FEM was similar to the measured data in the lower frequency range; however, calibrating the model usingmeasured FRFs from the undamaged structure allowed for any modeling error or inaccurate assumptions made during themodeling process to be mitigated. Model calibration changed the model from an idealized finite element model to a modelthat actually represents the undamaged structure. Blind damage detection was performed to detect fixing of rotation in twoout of the six boundary conditions. The magnitude and location of this damage was treated as unknown, and grouping andungrouping techniques were used to detect and locate the damage. Initial runs were performed with grouped parameters,possible damage locations were detected, and the damaged groups were ungrouped. The final runs with the ungroupedparameters showed definitively that the estimated parameters matched the true damage scenario with fixity in the rotationfor nodes 7 and 14. The results from the ungrouped model updating were successful since the true damage was accuratelydetected and there was no significant change in other members.
Frequency [Hz]
FD A
C [u
nitle
ss]
Calibrated vs. Measured - DamagedGrouped Estimated vs. Measured - DamagedUngrouped Estimated vs. Measured - Damaged
Fig. 13. Diagonal values of FDAC for Case B.
Frequency [Hz]
H2,
9 [1
/kg]
(dB
)
CalibratedEstimated - DamagedMeasured - Damaged
Fig. 14. Case B control group sample FRF for response at node 2 due to excitation at node 9.
J.D. Sipple, M. Sanayei / Mechanical Systems and Signal Processing 46 (2014) 179–190 189

Author's personal copy
5. Conclusions
A new method that uses frequency response functions for simultaneous stiffness and mass parameter estimation andmodel updating was presented and applied to a real structure using measured data. The UCF grid structure was selected forits availability of data and practical application. A sensitivity study was performed to determine the range of link stiffness forthe boundary conditions. An a priori finite element model was created to best match the assumptions made during designand construction of the UCF grid. This initial finite element model was calibrated using the FRF-based finite element modelupdating method to reduce the effects of modeling error and incorrect assumptions, making the a priori FEM a calibratedfinite element model. Then a new set of measured FRFs was used for the damaged structure. Grouping and ungrouping wereused to successfully determine the location and magnitude of unknown damage scenarios. It was also observed that thedamping ratios could also be easily adjusted to have the peaks of the FRFs match. Based on these observations, the authorsconclude:
� Calibration of the initial model must be performed prior to parameter estimation for damage detection to reduce themodeling errors that can lead to false parameter estimates.
� The FRF-based FE model updating method successfully detected, located, and quantified physical structural damage.� The FRF-based FE model updating method can be used with an actual structure and measured data, indicating its
robustness in the presence of modeling and measurement errors.
The next step in this research is to apply the FRF-based FE model updating method to a full-scale bridge for modelcalibration and simulated parameter estimation.
Acknowledgments
This material is based upon work supported by the National Science Foundation Partnerships for Innovation under GrantNo. 0650258. The authors would also like to sincerely thank Necati Catbas, Mustafa Gul, and Serhat Erdogan for theirsupport in making the UCF grid dynamic test data available for use in this paper.
References
[1] Charles R. Farrar, Keith Worden, An introduction to structural health monitoring, Philos. Trans. R. Soc. 365 (2007) 303–315.[2] J.E. Mottershead, M.I. Friswell, Model updating in structural dynamics, J. Sound Vib. 167 (2) (1993) 347–375.[3] Wei-Ming Li, Jia-Zhen Hong, Research on the iterative method for model updating based on the frequency response function, Acta Mech. Sin. 28 (2)
(2012) 450–457.[4] S. Pradhan, S.V. Modak, Normal response function method for mass and stiffness matrix updating using complex FRFs, Mech. Syst. Signal Process. 32
(2012) 232–250.[5] Salam Rahmatalla, Hee-Chang Eun, Eun-Taik Lee, Damage detection from the variation of parameter matrices estimated by incomplete FRF data, Smart
Struct. Syst. 9 (1) (2012) 55–70.[6] R.M. Lin, J. Zhu, Model updating of damped structures using FRF data, Mech. Syst. Signal Process. 20 (2006) 2200–2218.[7] R.M. Lin, D.J. Ewins, Analytical model improvement using frequency response functions, Mech. Syst. Signal Process. 8 (4) (1994) 437–458.[8] M. Imregun, K.Y. Sanliturk, D.J. Ewins, Finite element model updating using frequency response function data - II. Case study on a medium-size finite
element model, Mech. Syst. Signal Process. 9 (2) (1995) 203–213.[9] S. Pradhan, S.V. Modak, Normal response function method for mass adn stiffness matrix updating using complex FRFs, Mech. Syst. Signal Process. 32
(2012) 232–250.[10] Farid Asma, Amar Bouazzouni, Finite element model updating using FRF measurements, Shock Vib. 12 (2005) 377–388.[11] A. Esfandiari, F. Bakhtiari-Nejad, A. Rahai, M. Sanayei, Structural model updating using frequency response function and quasi-linear sensitivity
equation, J. Sound Vib. 326 (2009) 557–573.[12] Jesse D. Sipple and Masoud Sanayei, Finite element model updating using frequency response functions and numerical sensitivities Struct. Control
Health Monit., http://dx.doi.org/10.1002/stc.1601, online publication 2013.[13] MathWorks, Inc. (2012) MATLAB R2011b.[14] Computers and Structures, Inc. (2012) SAP2000v15.[15] R. Pascual, J.C. Golinval, and M. Razeto, A frequency domain correlation technique for model correlation and updating, in: Fifteenth International
Modal Analysis Conference (IMAC XV), Orlando, 1997.[16] F.N. Catbas (2013, January) Benchmark Problem on Health Monitoring of Highway Bridges. [Online]. ⟨http://www.cece.ucf.edu/people/catbas/
benchmark.htm⟩.[17] F.N. Catbas, M Gul, J L Burkett, Damage assessment using flexibility and flexbility-based curvature for structural health monitoring, Smart Struct. Syst.
17 (1) (2008).[18] Jason Lee Burkett, Benchmark studies for structural health monitoring using analytical and experimental models (Masters Thesis). University of
Central Florida, 2003.[19] Mustafa Gul, F.N. Catbas, Ambient vibration data analysis for structural identification and global condition assessment, J. Eng. Mech. 134 (no. 8) (2008)
650–662.[20] K.D. Hjelmstad, On the uniqueness of modal parameter estimation, J. Sound Vib. 2 (1996) 581–598.
J.D. Sipple, M. Sanayei / Mechanical Systems and Signal Processing 46 (2014) 179–190190