aula 1 - introdução a automação e robótica
TRANSCRIPT

Automação e Robótica
Professores: Antonio Garcia Netto Itália Ap. Zanzarini Iano
Coordenadoria de Fabricação MecânicaFatec-Sorocaba – José Crespo Gonzales

Automação – conceitos, tipos, preparação e análise de custo.
Introdução a Controles. Lógica. Sensores Atuadores Lógica Combinacional e Grafcet Robôs e manipuladores Laboratórios: Robótica e MPS
2
Programa de Aula

Critério de Notas
Avaliações: 1ª avaliação após término da matéria
teórica – Valor 10
2ª avaliação após encerramento da prática em laboratório
- Valor 10 Conceito Final = ∑ Notas/2 ≥6
3
SILVEIRA, Paulo R.; SANTOS, Winderson E. – Automação e Controle Discreto. 2ª ed. São Paulo: Editora Érica, 1998.
IDOETA, Ivan Valeije; CAPUANO, Francisco Gabriel. – Elementos de Eletrônica Digital. 28 ed. São Paulo: Érica, 1998.
ALAJARÍN, Juan de la Cruz M. C. de Vaca; BALIBREA, Luiz-Manuel Tomás. Problemas Resueltos con Autómatas Programables Mediante Grafcet. España: Servicio de Publicaciones, Universidad de Murcia, 1999.
REYES, José Santos; FERNANDÉZ, Richard J. Duro. Evolucion Artificial y Robótica Autónoma. España: RA-MA Editorial, 2005.
ASFAHL, C. Ray. Robots and Manufacturing Automation. Canada: Wiley, 1985. GROOVER, Mikel P; et al. Robótica Tecnologia e Programação. São Paulo:
McGraw-Hill, tradutor David Maurici Savatovsky, 1988. FULLER, James L. Robotics Intriduction, Programming and Projects. 2ª ed., New Jersey
Columbus: Prentice Hall Inc., 1999.
4
Referencias Bibliográficas

ROMANO, Vitor Ferreira; et al. Robótica Industrial Aplicação na Indústria de Manufatura e de Processos . São Paulo: Editora Edgard Blucher Ltda, 2002.
THOMAZINI, Daniel; ALBUQUERQUE, Pedro U. Braga de. Sensores Industriais - Fundamentos e Aplicações – 4ªed.,São Paulo: Editora Érica Ltda, 2007.
SIEGWART, Roland; NOURBAKHSH, Illah R. Introduction to Autonomous Mobile Robots. U.S.A.: Massashusetts Institute of Technology, 2004.
CRAIG, John J. Robótica. 3ª ed., Mexico: Prentice Hall Inc., 2006. JONES, Joseph L.; FLYNN, Anita M.; SEIGER, Bruce A. Mobile
Robots. 2ª ed., U.S.A., A K Peters, Ltd., 1999. NASCIMENTO JR., Geraldo Carvalho. Máquinas Elétricas Teoria
e Ensaios. São Paulo: Editora Érica, 2006. PAZOS, Fernando. Automação de Sistemas e Robótica. Rio de
Janeiro: Axcel Books do Brasil Editora, 2002.5
Referencias Bibliográficas

6
A primeira referência explícita ao conceito da criação de máquinas para a substituição do homem na realização de tarefas, foi escrita por Aristóteles (sec. IV aC):
Já no final do século XVI, Francis Bacon preconizava a idéia:
“se os instrumentos pudessem realizar suas próprias tarefas, obedecendo ou antecipando o desejo de pessoas...”
“...de que o saber devesse produzir seus frutos na prática, de que a ciência devesse ser aplicável ‘a indústria, de que os homens tivessem o dever sagrado de se organizarem para melhorar as condições de vida”
7
Historicamente, o surgimento da automação está ligado com a mecanização, sendo muito antigo, remontando da época de 3500 e 3200 a.C., com a utilização da roda. O objetivo era sempre o mesmo, o de simplificar o trabalho do homem, de forma a substituir o esforço braçal por outros meios e mecanismos, liberando o tempo disponível para outros afazeres, valorizando o tempo útil para as atividades do intelecto, das artes, lazer ou simplesmente entretenimento.
Ao longo dos séculos, diversas invenções propiciaram a necessária bagagem tecnológica para a gradual substituição do homem pela máquina
8
1568 – Primeira máquina-ferramenta inventada que se tem notícia – Torno de abrir roscas.
1770 – Surgem os primeiros mecanismos automáticos fixos e as linhas de montagem para produção em massa;
1788 – Primeiros reguladores mecânicos, instrumentação e reguladores pneumáticos e hidráulicos;
De acordo com a necessidade da evolução, foram desenvolvidas máquinas ferramentas com controle simples com execução de seqüência simples de operação;
1950 – Máquinas-ferramentas com controle transistorizado Comando Numérico (CN).
1960 – Controle por computador, passando a trabalhar segundo instruções codificadas que lhes são transferidas por fita perfurada ou fitas (cartões) magnéticos.
1970 – Extensão lógica do controle numérico, com o advento do microprocessador, foi o Controle Numérico Computadorizado (CNC). – Em paralelo ao CN foram desenvolvidos os Robôs, sendo que nesta data foi introduzida a primeira linguagem de programação em computador, denominada WAVE.
Evolução da Automação:

9
Marco transitório de uma sociedade: Antes: Agrícola e organizada na produção de bens de
consumo; Depois: Sociedade industrialmente mais produtiva, voltada
para o consumo e organizada em um novo modelo econômico de sucesso financeiro, associados as novas técnicas contábeis e o mercado de capitais.
Teve início na Inglaterra, em meados do séc. XVIII, caracterizou-se pela introdução de máquinas simples que surgiram para a substituição da força muscular pela mecânica e tarefas repetitivas executadas pelo homem.
Três invenções de máquinas marcaram esse período de transição:
1 - Máquina de fiação; 2 - Tear mecânico; 3 - Motor a vapor.
Revolução industrial

10
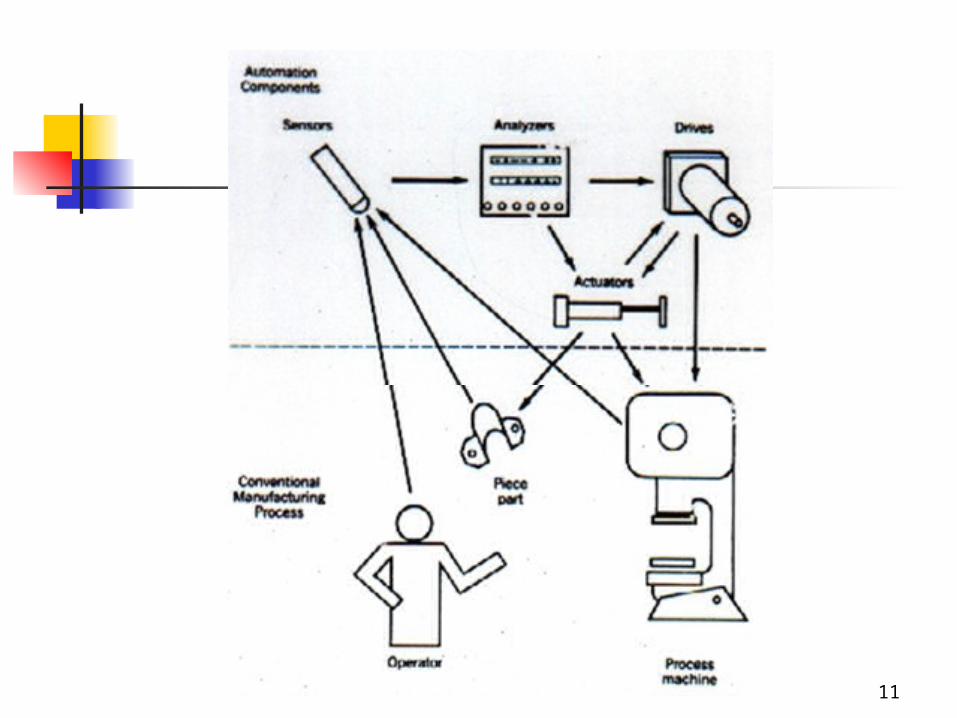
Automação
Controle
Atuador Sensor
11
12
A palavra controle, de origem francesa, quer dizer o ato ou poder de exercer domínio, fiscalizar, supervisionar, manter o equilíbrio, alvos comuns de nações, regiões ou comunidade como um todo.
Na escala tecnológica, o controle assume papel primordial e decisivo dentre os modelos e processos existentes, sejam eles simples, modestos, robustos, ou de extrema complexidade no plano das ações.
A necessidade de controlar processos deu e dá origem as técnicas de controle e a evolução destas técnicas automaticamente controladas conceitua-se hoje como AUTOMAÇÃO (Conceito introduzido nos EUA em 1946, substituindo o termo Cibernética).
Controlar para não ser controlado
13
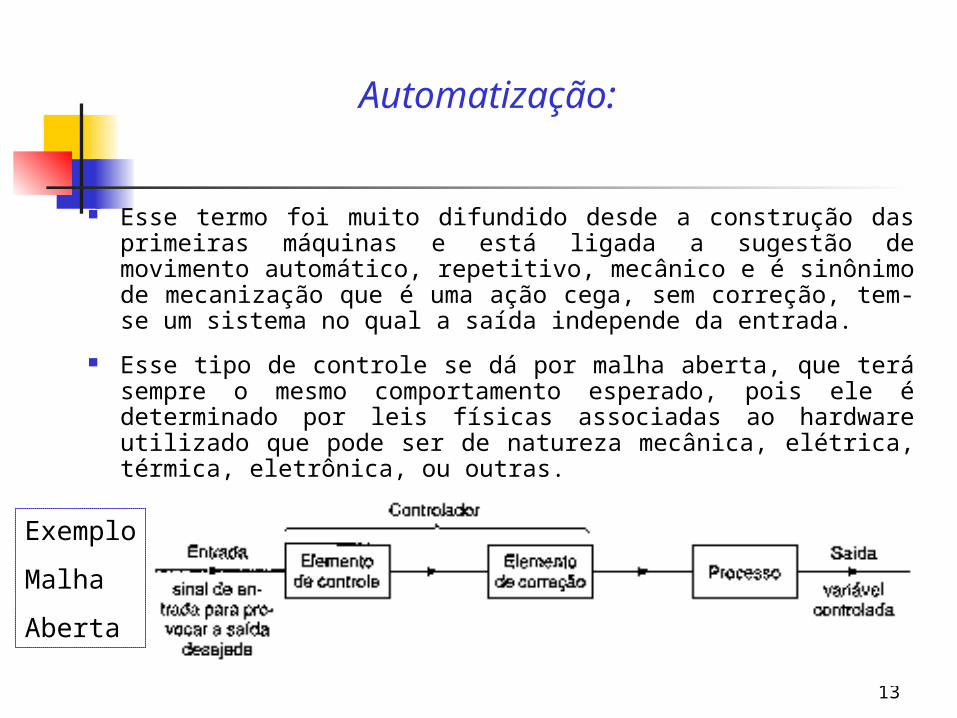
Esse termo foi muito difundido desde a construção das primeiras máquinas e está ligada a sugestão de movimento automático, repetitivo, mecânico e é sinônimo de mecanização que é uma ação cega, sem correção, tem-se um sistema no qual a saída independe da entrada.
Esse tipo de controle se dá por malha aberta, que terá sempre o mesmo comportamento esperado, pois ele é determinado por leis físicas associadas ao hardware utilizado que pode ser de natureza mecânica, elétrica, térmica, eletrônica, ou outras.
Exemplo
Malha
Aberta
Automatização:
14
Tecnologia de Dispositivos Automação
Automação Industrial:
A palavra automação está diretamente ligada ao controle automático, ou seja ações que não dependem da intervenção humana. Este conceito é discutível pois a “mão do homem” sempre será necessária, pois sem ela não seria possível a construção e implementação dos processos automáticos.
Pode se dizer que a Automação Industrial é oferecer e gerenciar soluções pois ela sai do chão de fábrica para voltar seu foco para o gerenciamento da informação, através de um conjunto de técnicas por meio das quais se constroem sistemas ativos capazes de atuar com uma eficiência ótima pelo uso de informações recebidas do meio sobre o qual atuam (entradas e saídas).
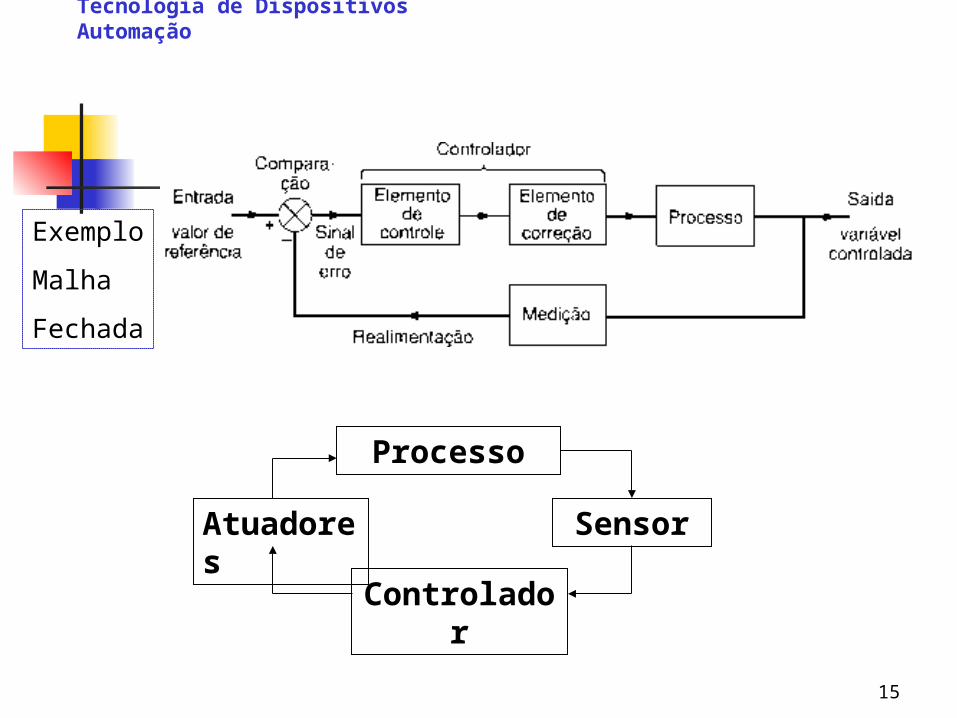
Com base nas informações, o sistema calcula a ação corretiva mais apropriada para a execução da ação e esta é uma característica de sistemas em malha fechada. Essa relação entradas/saídas serve para corrigir eventuais valores na saída que estejam fora dos valores desejados.
.
15
Tecnologia de Dispositivos Automação
Processo
Atuadores Sensor
Controlador
Exemplo
Malha
Fechada
TIPOS DE AUTOMAÇÃO
Fixa – Caraterizada pela rigidez da configuração física,
volume de produção elevado, equipamentos especialmente projetados e adequados ao produto, muito eficiente e tem elevadas taxas de produção, proporcionado baixo custo unitário, risco está ligado a obsolescências do produto obrigando a alterações físicas da linha de produção.
Exemplo: linhas “transfer”, altamente integradas usadas na indústria automotiva.
16

Programável – Usada quando o volume de produção
é relativamente baixo, variedade de produtos a serem fabricados, possui equipamentos programaveis como CNC, CLP, Robôs, etc., trabalha-se por lotes, indicado para produção por encomenda, necessita-se de mão de obra especializada.
17
TIPOS DE AUTOMAÇÃO
Flexível – Também chamadas de SFM (Sistemas
Flexivel de Manufatura- FMS), caracteriza-se por utilizar conceitos de produção seriada com equipamentos programáveis, adequada para volumes médios de produção, em lotes recorrentes de peças.
Exemplo: Centros de usinagem flexíveis que produzem mais de uma peça ao mesmo tempo.
18
TIPOS DE AUTOMAÇÃO

19
TIPOS DE AUTOMAÇÃO

Preparando para Automação
20
Porque Automatizar??
Trata-se de um processo de evolução tecnológica irreversível;
Valorização do ser humano liberando-o de tarefas entediastes e repetitivas, insalubres e de riscos;
Aumento da qualidade de vida de toda uma sociedade promovendo seu conforto e maior integração;
Maior enriquecimento pelo menor custo do produto ou maior produtividade;
Sobrevivência e forte apelo de marketing dentro de mercado altamente competitivo;
Criação de empregos diretos e indiretos com manutenção, desenvolvimento e supervisão de sistemas;
Busca pela qualidade do produto e a satisfação do cliente.

Princípios fundamentais: Desde a concepção, o sistema a construir deve ser
composto de uma parte operativa e uma parte de comando. Esta estrutura permite um diálogo entre o futuro utilizador do sistema e o técnico de automatismos, responsável pela parte de comando;
Importa dar uma descrição precisa do funcionamento da parte comando, por uma aproximação progressiva das funções a realizar, até a sua materialização;
A linguagem corrente presta-se mal a essa descrição. Daí, a necessidade de adaptar uma linguagem especifica: O Grafcet
21
Metodologia na Concepção dos Sistemas Automatizados de
Produção

P.O. - Parte Operativa: Relaciona-se todos os aspectos da produção de
determinado produto, como alimentação, movimentação, manipulação, passando por lay out e mão de obra, cria-se um caderno de tarefas, e quanto mais detalhado, melhor para a implantação de comando da automação.
P.C. - Parte de Comando: Através das informações contidas no caderno de
tarefas busca-se hardware e software para por em funcionamento a automação.
22
SAP – Sistema Automatizado de Produção

23
Numa máquina-ferramenta de comando numérico, a parte operativa é a máquina-ferramenta e a parte comando o equipamento de comando numérico:
Exemplo
Máq.-ferramenta= P.O.
Comando Numérico= P.C.
Ordens para operação
Informações de posição, fim trabalho,...
Parâmetros de fabrica
Marcha Paragem
Visualização, sinalizadores, etc.
Peças em bruto
Peças trabalhadas + aparas
Parte operativa efetua operações (transformações de peças brutas em peças trabalhadas) desde que a ordem lhe seja dada pela parte de comando;
Graças as informações (posição, etc.) dadas pela parte operativa, a parte comando é mantida informada do estado de avanço das operações.

Nível 1: Especificações Funcionais Descrição do comportamento da P.C. em relação a
P.O.; Permitir ao projetista a compreensão do problema
de automação face a diferentes situações.
Nível 2 : Especificações Tecnológicas e Operacionais: Acréscimo as especificações funcionais as precisões
indispensáveis a condições de funcionamento;
24
Caderno de Tarefas

É um método de descrição do caderno de tarefas da P.C. de um S.A.P., utilizável tanto no nível 1 como no nível 2.
O funcionamento de um S.A.P. pode ser representado graficamente por um conjunto de: Etapas: as quais são associadas as ações; Transições: as quais são associadas as
receptividades; Ligações Orientadas: ligando as etapas as
transições e as transições as etapas.
25
Grafcet

90% Planejamento 10% Fazer funcionar
SAP tem que assegurar: produtividade e rentabilidade
“ Não é mais tentativa e erro”
26
Custo da Automação
Modelo
Definição do Sistema
Definição dos Meios
O custo da Automação depende do grau de conhecimento do projetista.

Economia Investimentos
Mão de Obra Equipamentos/software
Material Instalações
Redução de refugos e retrabalho
Treinamento
Aumento da Produção Manutenção
∑ de economia ∑ de investimentos
27
∑ de economia - ∑ de investimentos = Ganho
Custo da Automação