application of environmental learning theory …€¦ · application of environmental learning...
TRANSCRIPT

Application of Environmental Learning Theory to Spatial Knowledge Acquisition
from Maps Alan M. MacEachren
Department of Geography, The Pennsylvania State University, University Park, PA 16802,
FAX 814/863-4718, e-mail [email protected].
Abstract. Knowledge of space i s critical to attitudes toward, decision making about, and behavior within places. A person’s environ- mental knowledge depends upon how knowl- edge is acquired and mentally processed. Past studies of environmental knowledge acquisi- tion have focused primarily on that which re- sults from behavior in the environment. Re- search has led to a developmental theory that views knowledge acquisition as a gradual pro- cess that begins with selective, fragmentary information about a place, to which the in- dividual information adds over time until an integrated cognitive representation i s achieved. The present study was designed to determine the applicability of this develop- mental theory of environmental knowledge ac- quisition to learning from maps. I also con- sider issues of hierarchical spatial knowledge organization, the extent to which cognitive “maps” are images, propositions, or both, and the systematic biases inherent in knowledge obtained from maps.
This paper describes an experiment in which map presentation strategies incorporating seg- mentation are compared to a control case. Two of these segmentation strategies are designed to facilitate a developmental sequence for knowledge acquisition, one focused on land- marks and the other on routes. The third seg- mentation strategy emphasizes development of a regionalized hierarchical knowledge struc- ture. The developmentally-based segmenta- tion strategy emphasizing routes makes knowl- edge acquisition easier, but the control case in which the map is not segmented results in
Annals of the Association of Amencan Geographers 82(2) 1992 pp 245-274 0 Copyright 1992 by Association of American Leographers
faster access of distance and direction informa- tion on a subsequent test. No difference in accuracy of distance and direction estimates occurred among groups. Overall findings sup- port a dual coding theory for spatial knowledge in which both analog (image) and propositional information i s included in cognitive maps. Dis- tance and direction tasks seem to be solved using imagery except when subjects judged to have low visualization ability use a map learn- ing strategy that facilitates propositional encod- ing-the route-segmentation strategy. Evi- dence suggests that differences in map versus environment-derived cognitive representations identified by other authors are not simply due to a difference between viewing maps holisti- cally and environments in segments, but to a combination of segmentation with a focus on routes that leads to procedural encoding.
Key Words: spatial knowledge acquisition, environ- mental learning theory, cognitive map, map segmen- tation, imagery coding, propositional coding.
OGNlTlVE mapping, the process of spa- tial knowledge acquisition and organi- zation, has intrigued investigators from
many disciplines including geography, cartog- rap hy, psycho logy, planning , and arc hi tect u re. Geographers interested in environmental per- ception, for example, have studied cognitive maps in relation to risk perception by the pub- lic and how these perceptions should be incor- porated in public policy related to natural and technological hazards (e.g., Zeigler et al. 1983). Some urban social geographers have studied

246 Spatial Knowledge Acquisition from Maps
cognitive maps of ”neighborhood” because differences between social (cognitively deline- ated) and political (cartographically delineated) neighborhoods can result in planning deci- sions that disrupt the social fabric of the city (e.g., Pacione 1983). Cultural geographers in- vestigating vernacular regions at national and subnational scales, have attempted to measure group consensus on spatial hierarchies and re- gional boundaries in cognitive maps (e.g., Zelinsky 1980; Lloyd and Steinke 1986). Even geographers attempting to develop geographic information systems have drawn on what we know about cognitive maps and mapping to develop models for digital representation of spatial databases and query systems for access of that data (e.g., Peuquet 1988).
Central to geographer’s interest in cognitive maps and mapping is the realization that an individual’s knowledge of space is critical to their behavior in it and understanding behavior in space i s a fundamental geographical prob- lem. Most individuals are faced with daily nav- igation decisions from home to work or shop- ping, from an airport to a client’s office, or from one stop to the next while on vacation. The knowledge that they acquire about a place and the way they organize that information will determine both destinations selected and routes taken. Garling (1989) has demonstrated, for example, that people who are stimulated to generate a map-like mental representation se- lect more efficient multi-stop trips than those who simply know relative distances among destinations.
What people know about an environment depends on how knowledge i s acquired and on the mental processes by which that knowl- edge is organized, stored in memory, and later retrieved (Lloyd 1989a; Leiser and Zilbershatz 1989). Cognitive representations of space de- rived from maps have been shown to differ substantially from those derived from direct experience (Evans and Pezdek 1980; Thorndyke and Hays-Roth 1982; Lloyd 1989a). Questions remain, however, about whether the differences are due to the static format in which we traditionally view maps, to scale dif- ferences between maps and the environments they represent, to the consequent ability to view a map in its entirety instead of in a se- quence of small fragments, or to as-yet-unex- pected factors.
When spatial knowledge i s acquired from
maps, the choice of a map learning strategy can influence the efficiency and accuracy with which spatial information i s learned (Thorndyke and Stasz 1980). Interactive com- puter systems, in turn, have the potential to influence learning strategies by controlling the manner in which mapped information i s pre- sented. The primary goal of the project de- scribed below was to determine the influence of various map presentation strategies that in- volve segmentation on the cognitive represen- tation of space developed from a map. Specifically, an experiment was designed to as- sess the potential applicability of developmen- tally based environmental learning theories (that account for spatial knowledge acquisition directly from the environment) to learning from maps.
This research has implications for other the- ories about the encoding and retrieval of spa- tial knowledge as well as for applied research directed to computer-assisted geographic in- struction, vehicle navigation, and wayfinding aids for the visually impaired. Results are rele- vant to work on the extent to which cognitive spatial representations are stored as images, propositions, or both, to study of systematic biases inherent in knowledge obtained from maps, as well as to questions of regionalization and hierarchical organization of spatial knowl- edge that have attracted the attention of a wide cross-section of geographers.
The Process of Spatial Knowledge Acquisition
Although little attention has been given to the process of learning environmental informa- tion from maps, whether the maps are static or interactive, a considerable body of literature exists dealing with spatial knowledge acquisi- tion directly from the environment. This litera- ture offers a conceptual basis for development of information presentation strategies that may be effective for map learning.
There i s considerable evidence that acquisi- tion by adults of environmental information about an unfamiliar place is a gradual develop- mental process that begins with selective, frag- mentary information to which further informa- tion i s added over time until the person achieves an integrated cognitive representa- tion. In addition, experimental evidence indi-

MacEach ren 247
cates that knowledge i s represented hierarchi- cally in discrete spatial units (Couclelis et al. 1987). Disagreement, however, exists concern- ing the actual process of developing this inte- grated hierarchical representation, what the basic building blocks of the process are, and how to facilitate it. One view i s that paths and districts serve as early learning frameworks with landmarks learned subsequently in rela- tion to those paths or districts (Appleyard 1970; Hart and Moore 1973; Garling et al. 1981). The alternative hypothesis is that primary nodes or reference points (i.e., landmarks) are funda- mental building blocks with paths serving as links among known landmarks (Siege1 and White 1975; Golledge 1978; Golledge et al. 1985).
Both perspectives incorporate the long-ac- cepted distinction between “route” (or proce- dural) and “survey” (or state) knowledge (Tol- man 1958; Stea 1976) by hypothesizing that route knowledge precedes development of survey knowledge. Route knowledge is con- ceived of as a sequence of features and/or ac- tions that describe a path between two known points. A cognitive representation of route knowledge can be considered one-dimen- sional. Survey knowledge, on the other hand, is more two-dimensional, emphasizing spatial relations among places and features.
Path-Based learning
Considerable empirical evidence exists to support the contention that survey knowledge can be acquired through integration of route knowledge (e.g., Devlin 1976; Golledge and Spector 1978; Clayton and Woodyard 1981). Support for the belief that paths precede land- marks as the initial component of adults’ de- veloping cognitive representations comes largely from research using a sketch-map methodology. Appleyard (1970) analyzed sketch maps of recent and long-term residents of a Venezuelan city. Paths were dominant for the short-term residents while longer-term res- idents produced better-integrated maps, con- taining more landmarks. Similar results were obtained by Devlin (1976) for Navy wives, who after moving into a new town, produced sketch maps after three weeks, and again after three months of residence.
Garling et al. (1981), in a controlled study of subjects taken on a tour of an unfamiliar resi-
dential area, concluded that path knowledge was acquired before landmark knowledge be- cause subjects learning the environment could recall the sequence of landmarks along a route before they could accurately estimate locations of those landmarks. An alternative interpreta- tion of this finding is that relative landmark locations were simply learned prior to metric information.
The most complete theory of environmental learning that puts emphasis on paths as a fun- damental building block is grounded in Piaget’s theory of child development (Piaget et al. 1960; Piaget and lnhelder 1956). Hart and Moore (1973) proposed the first model of adult envi- ronmental learning based on Piaget’s four stages of development (sensorimotor, pre- operational, concrete operational, and formal operational) linked to his three levels of spatial development (topological, projective, and Eu- clidean). They suggest that it i s reasonable to expect formal similarities between ontogenetic and microgenetic development of cognition for geographic environments (i.e., between indi- vidual development of spatial ability over the life span and development of knowledge of a place by adults over shorter time spans, respec- tively).
Moore (1976) provides a concise description of the three-stage model for microgenetic de- velopment. The initial stage i s an undifferenti- ated egocentric reference system (organized around a person’s own position and actions in space and including only elements of great per- sonal significance). Hart and Moore point to evidence, in Piaget’s work with children, that routes are the basic component of this initial stage of cognitive spatial development with “the various landmarks being fixed in terms of [the routes], instead of vice versa” (1973, 276). Moore’s second stage i s a differentiated and partially coordinated, fixed reference system (organized as clusters or subgroups of ele- ments with only rudimentary coordination among groups). This stage consists of three forms: (a) fixed point and radial references like landmarks and intersections; (b) fixed linear- route references like major streets, rivers, etc.; and (c) fixed areal-spatial references like a cen- tral business district or a neighborhood. The final stage results in an operationally coordi- nated and hierarchically integrated reference system (organized in terms of some abstract geometric pattern).

48 Spatial Knowledge Acquisition from Maps
Peruch et al. (1989) have recently presented evidence that both professional drivers (taxi drivers) and ordinary residents of a city base distance estimates on knowledge of routes be- tween locations rather than on straight-line dis- tances. This i s interpreted as evidence that routes are learned prior to relative location of (and straight-line distance between) locations. They appear to agree with Hart and Moore (1973) that locations become known in relation to routes connecting them rather than in rela- tion to each other. In research with blind sub- jects learning routes haptically, Lederman et al. (1985) found a similar impact of route length on distance estimates. For relative location in- formation (requiring direction as well as dis- tance knowledge), a heuristic using a survey- type representation was apparently used. This result indicates that it is possible, even without vision, to mentally transform route information into a survey representation.
landmark-Based Learning
In contrast to theories that assume paths to be the fundamental building blocks with land- marks known only in relation to those paths, Siegel and White (1975) hypothesize a knowl- edge-acquisition sequence that begins with landmarks. Their three-stage model i s tied to three kinds of learning systems. Acquisition of landmark knowledge (based on recognition-in- context memory) is followed by route knowl- edge (hypothesized to develop “through a kind of paired association of changes of bear- ing with landmarks”). Scaling (or metricization) of routes i s then assumed to occur gradually along with the interrelation of routes into a network structure “which i s or becomes ‘configurational.”’
Closely related to Siegel and White’s (1975) theory i s the anchor-point theory originally proposed by Golledge (1978). This theory, like that of Hart and Moore (1973) has i ts founda- tion in Piagetian developmental theory and as- sumes a similarity between the cognitive devel- opment of spatial ability in children and the development of spatial knowledge by adults with experience in a place. Golledge, however, chose to interpret Piaget’s sensorimotor stage somewhat differently than did Hart and Moore, linking it to landmark rather than path knowl- edge. This interpretation was based on evi- dence that salient landmarks can help very
young children (less than one year old) begin to overcome their egocentric perspective on the world and that they facilitate representation of important aspects of space (e.g., Acredolo 1981). In Golledge’s anchor-point theory, significant environmental cues (landmarks) are assumed to be required to anchor, or serve as endpoints for, route knowledge. From this per- spective, the landmarks must be learned be- fore routes. Empirical evidence supporting ini- tial acquisition of landmarks has been provided by Evans et al. (1981). Okabe et al. (1986) have also demonstrated that landmarks have an “an- chor” affect in remembering the location of irregular routes.
The distinction made by Sadalla et al. (1980) and Lindberg and Garling (1987) between ”ref- erence” points and other point information is relevant to the landmark-path debate. Both have provided evidence that locations of key positional features in cognitive representations provide an organizational structure to which locations of nearby points are related. Recog- nizing this hierarchical structure, we could ex- pect that relatively few landmarks would be known accurately in the earliest stages of knowledge acquisition, but that these land- marks might be the key features around which the initial topological network of routes begins to develop. Empirical evidence that shows most landmark knowledge developing after path knowledge might not, therefore, be evidence against Golledge‘s (1978) anchor-point hypoth- esis.
In an update of the anchor-point hypothesis, Golledge and his colleagues have revised their definition of anchor points. They suggest that the anchor or reference “points” may not have to be points at all, but could be segments of a route or small districts (Couclelis et al. 1987). For example, the main U.S. highway passing through a small town is just as likely to be an anchor for a developing cognitive representa- tion as is a person’s home or local supermarket because that main highway would be encoun- tered well before finding a place to live or shop.
In comparing theories of landmark (anchor) and path-based learning, it i s important to re- member that both theories are based on the assumption that microgenetic development of spatial knowledge will follow the same devel- opmental sequence as ontogenetic develop- ment. There has been no major test of whether

MacEachren 249
a landmark or path-based sequence is optimal for adults who have experienced all stages of ontogenetic development. The present study will provide such a test in the context of learn- ing from maps.
Hierarchical Knowledge Structures
Whether paths or landmarks serve as key building blocks for cognitive representations, evidence suggests that once acquired, spatial knowledge is organized hierarchically. People seem to know relative positions of places within a region and relative positions of re- gions, but not position of locations within dif- ferent regions ( e g , Stevens and Coupe 1978). Maki (1981) has also demonstrated that re- sponse time to verify distance and direction judgments is significantly faster for inter-clus- ter than for intra-cluster locations, an indica- tion that judgments are being made at a higher level i n the hierarchy (i.e., between the super- ordinate regions).
As Leiser and Zilbershatz (1989) point out in discussing design of computational models of wayfinding, most empirical evidence for hier- archical organization of spatial knowledge sup- ports a region-based rather than network- based hierarchical structure as a structure used by humans. This evidence favors the landmark learning approach over path learning. With emphasis initially on key landmarks or “an- chors,” regions would gradually develop by spreading out from them. A path-learning se- quence would lead to network-based hierar- chies for which knowledge of places along a route i s stored and relative positions of routes are learned but relative position of places on different routes are not stored separately.
Convincing evidence for hierarchical struc- ture in landmark knowledge has been pro- vided by McNamara et al. (1989). For locations named on a map and objects located in space, they identified individualized hierarchical clus- ters in subjects’ cognitive representations. Both recognition priming and distance estima- tion procedures showed that distance esti- mates for between-cluster locations were exag- gerated in relation to within-cluster locations, a clear indication of hierarchical structuring. Hirtle and Jonides (1985) found similar evi- dence of landmark hierarchies, but showed that the hierarchies are not necessarily spatially organized. Aspatial groupings based on factors
such a similarity of function acted to produce what, in metric terms, would be considered distortion in distance estimates.
Although there is more evidence for region- based knowledge structures, at least one study has demonstrated path-based organization of spatial knowledge. Allen (1981) found evidence for segmentation in route knowledge and also found across-segment distances to be judged as longer than equal-length within-segment distances. As with Maki’s (1981) region-based experiment cited above, this result suggests that across-segment judgments may be occur- ring at a higher level in a route-based hierarchy.
It is likely that both landmark and route- based hierarchies occur to some extent, possi- bly even for the same individual. One study has been conducted that supports this contention. Chase (1983) examined potential hierarchies in cognitive representations of very and moder- ately experienced Pittsburgh taxi drivers and ordinary citizens. He found evidence for a complex multitiered hierarchy that includes lo- cation, region, and route components. His sub- jects completed a series of tasks that included: drawing sketch maps, naming neighborhoods and locating them on a base map, estimating distances within and across neighborhoods, naming “major” streets, naming all known streets in neighborhoods, and generating routes. Analysis and synthesis of results led Chase to conclude that a three-tiered overall hierarchy of knowledge exists. This hierarchy includes locations within neighborhoods, with these neighborhoods nested within larger geo- graphic regions, that are further linked to global features of the environment (e.g., the three rivers of Pittsburgh) and to each other by routes.
Maps as Sources of Spatial Information
Cognitive spatial representations may be de- rived from direct experience with the environ- ment, from media such as travel brochures and maps, or from a combination of these sources. In the case of large regions (e.g., Appalachia), our cognitive representations are often solely the result of media. In more limited environ- ments such as a city, our initial spatial informa- tion may come from a map prior to actual ex- perience with the environment. That cognitive
50 Spatial Knowledge Acquisition from Maps
representations can be generated from maps has been demonstrated by a number of au- thors (Garling, et al. 1983; Peterson 1985). Evi- dence exists that representations generated from maps can be picture-like (Levine, et al. 1982), and can be mentally scanned for infor- mation (Lloyd and Steinke 1985).
A cognitive representation obtained from a map may differ substantially from a represen- tation for the same area derived from direct environmental experience (Evans and Pezdek 1980; Thorndyke and Hays-Roth 1982). For knowledge acquisition from maps, three re- lated issues relevant to the present investiga- tion have been addressed: (1) systematic dis- tortion of spatial information learned from maps, (2) restriction of representations ac- quired from maps to a single orientation, and (3) the influence of different learning strategies on what is obtained and how accurately.
Systematic Distortion
Canter and Tagg (1975) hypothesized the use of simplifying structures that could enable a person to recall and use their cognitive repre- sentations of cities more readily. Tversky (1981) has provided evidence for similarities in the way information derived from both the envi- ronment and maps is simplified in the encod- ing and retrieval process. She proposes that in order to orient and anchor figures in space, heuristics based on principles of perceptual organization are applied. The two heuristics suggested are rotation (shift of the natural axis of a figure to correspond with the frame of reference) and alignment (the gravitation of figures toward each other). Evidence pre- sented supports this postulate for visual forms, geographic relationships at the world scale, personally experienced local environments, and artificial maps. Similar results were ob- tained by Howard and Kerst (1981) for both known locations and studied maps. A lessen- ing of the affects was demonstrated for the familiar local environment after brief map study. Lloyd (1989a) also found less severe simplification due to rotation and alignment for map learning versus environment learning, even with an unfamiliar map environment studied for ten minutes versus a city in which subjects had lived for a number of years.
Another systematic distortion in cognitive representations identified by Lloyd (1989b), re-
lates to the influence of distance between places on errors made in both distance and direction. While distance error increased with actual distance separating places, direction error decreased. In addition, Lloyd’s results in- dicated a tendency to underestimate long dis- tances and overestimate short distances. This latter bias corresponds to that found when the cognitive representation has been derived di- rectly through behavior in the environment (Holyoak and Mah 1982). Lloyd (1989a), in a direct comparison of map with environment learning, concluded that differences related to distance and direction estimates were quanti- tative rather than qualitative. Map-learning subjects exhibited similar but smaller distor- tions.
Orientation Bias
Cognitive representations derived from maps have been demonstrated to be linked to the orientation (in terms of cardinal directions) of the map studied (Levine et al. 1982). I n com- parison, cognitive representations derived from direct environmental experience have been shown to be orientation-free (e.g., dis- tances and directions are remembered equally quickly and accurately regardless of the refer- ence direction). It has been suggested that, for representations derived from the environment, the perspective of the representation i s from within (i.e., as if you could imagine being in the environment at one location while consid- ering the distance and direction to another lo- cation), rather than from above, as it i s for a learned map (Thorndyke and Hays-Roth 1982; Evans and Pezdek 1980).
In order to compare the cognitive process used to make relative location decisions using information learned from maps with learning gained directly from the environment, Evans and Pezdek (1980) measured response time needed by subjects to determine relative posi- tion accuracy for triads of U.S. states or build- ings on campus. Response times for the state triads increased as a function of the degree of rotation of states from their orientation on a north-at-the-top map. No rotation effect was found for the buildings. This was interpreted as evidence that subjects were mentally rotating a map image for state triads because their knowl- edge of state position was based on an image obtained from a map. For buildings on their

MacEach ren 251
campus that were known from direct experi- ence, knowledge was apparently available in a different structure that did not require rota- tion. In a second experiment, subjects unfamil- iar with the campus learned building locations from a campus map and completed the same test. A rotation effect corresponding to that for the state location case was found.
In spite of the apparent increase in process- ing difficulty for position judgments at orienta- tions other than the one presented by the map, Lloyd (1989a) argues that consistent orienta- tions on maps are advantageous. This opinion is based on results that show smaller overall position errors in spatial knowledge acquired from fixed orientation maps than from direct acquisition through behavior in the environ- ment.
learning Strategies
In what has been the most complete study of learning strategies published to date, Thorndyke and Stasz (1980) considered the fol- lowing questions: (1) Are there large individual differences in map-learning performance? (2) Do map learners use diverse study proce- dures? (3) What distinguishes good and poor learners? (4) Are different learning strategies employed by experienced and novice map learners? In their initial experiment, verbal pro- tocols were obtained from subjects concerning their attentional focus, study heuristics, and evaluations of their learning process. Possibly due to their limited sample of three "experi- enced" and five "novice" subjects, they found no clear difference between the experienced and novice learners. They did, however, iden- tify three common elements of the good learners' strategies: (1 ) segmentation and sys- tematic focus on subsets of information, (2) conscious use of learning techniques, and (3) consistent and accurate self-evaluation of learning progress.
Segmentation and focus on subsets of infor- mation corresponds to the underlying premise of developmentally based theories of spatial learning; that learning proceeds from local un- coordinated knowledge to a global coordi- nated representation. A number of studies have forced subjects to use a segmentation strategy for map learning by providing map information as a sequence of parts or layers. Shimron (1978) compared two segmentation
strategies and found that spatial segmentation of a schematic map, by presentation as sepa- rate regions, resulted in more accurate mem- ory than separation into functional layers (i.e., cities, highways, etc.).
Kulhavy, et al. (1982) argue that it i s the re- gionalization itself rather than segmenting of information for sequential presentation that aids learning. Their three test groups were each presented with a regular street grid to which point features were added in six stages. For one group, the stages consisted of conceptual groupings (e.g., sports, plants, etc.); for the second group, spatial groupings were used; and for the third, random groupings were pre- sented. For all three groups, the reference grid appeared to aid learning and no significant dif- ferences among groups were found.
In a route segmentation experiment, Hanley and Levine (1983) demonstrated that if two in- terconnected routes were learned indepen- dently, they could be organized into a coordi- nated representation. For the simple (three-segment) routes in their study, the coor- dinated representation was learned more easily from a complete map. This suggests that there is a lower threshold or unit size for memory "chunks," below which further segmentation interferes with, rather than aids, acquisition of information.
Project Description
Introduction
Differences in map-user cognitive represen- tations were examined for learning in which a map i s segmented and presented in an incre- mental fashion versus learning from a complete map that can be studied using whatever strat- egy seems most appropriate. Three feature presentation strategies were compared to a control case. They were: (1) "landmark learn- ing"-learning key landmark locations fol- lowed by routes connecting them, other land- marks along the routes, and finally the entire map with links between the main routes; (2) "route learning''-learning key routes followed by landmarks along those routes, then the links among the routes, and then the entire map; (3) "region learning"-learning all route and land- mark information in each of several separate

252 Spatial Knowledge Acquisition from Maps
but spatially contiguous regions, then pairs of regions followed by the whole map (Fig. 1).
The landmark and route-learning strategies correspond to the anchor-point and path learn- ing developmental theories of environmental
Figure 1. Segmentation strategies for hierarchical map learning.
knowledge acquisition described above. The region-learning strategy was developed in re- sponse to hierarchical theories of spatial- knowledge organization. For map learning, knowledge acquisition does not have to occur along travel paths as it does for environment learning. While there may still be an advantage to organizing information presentation hierar- chically, there may be no advantage to seg- menting the map on the basis of routes or landmarks. If, as Kulhavy, et al. (1982) suggest, regionalization is more important than sequen- tial learning, a strategy that represents the bounds of the hierarchically arranged places may facilitate development of the hierarchical knowledge structure.
Subjects
Twenty-five male undergraduate volunteers were recruited for each group. They were paid a total of $10.00 for participation in two ses- sions of approximately one hour each. In order to minimize the potential bias due to formal training in map use or cartography, no geogra- phy majors were included in the study. Sub- jects were recruited primarily through newspa- per advertisements and only four subjects had any formal map training.
Testing Environment
An interactive computer environment was developed in which whole maps or map com- ponents could be displayed and studied, and subjects could be presented with questions to test their acquisition of information from the map or map component. Subjects provided all responses by pointing to a screen location with a mouse. Response time measurements were recorded during both learning and testing phases of the experiment. Response times offer a proven technique for investigating cog- nitive organization of spatial information be- cause times vary with the difficulty of mental processing (Lloyd and Steinke 1985).
The map used in the experiment contained a street pattern and selection of landmarks for a section of a city (Fig. 2). It was chosen to meet the following criteria: (1) it can be adequately learned in a one-hour experimental session, (2)
MacEach ren 253
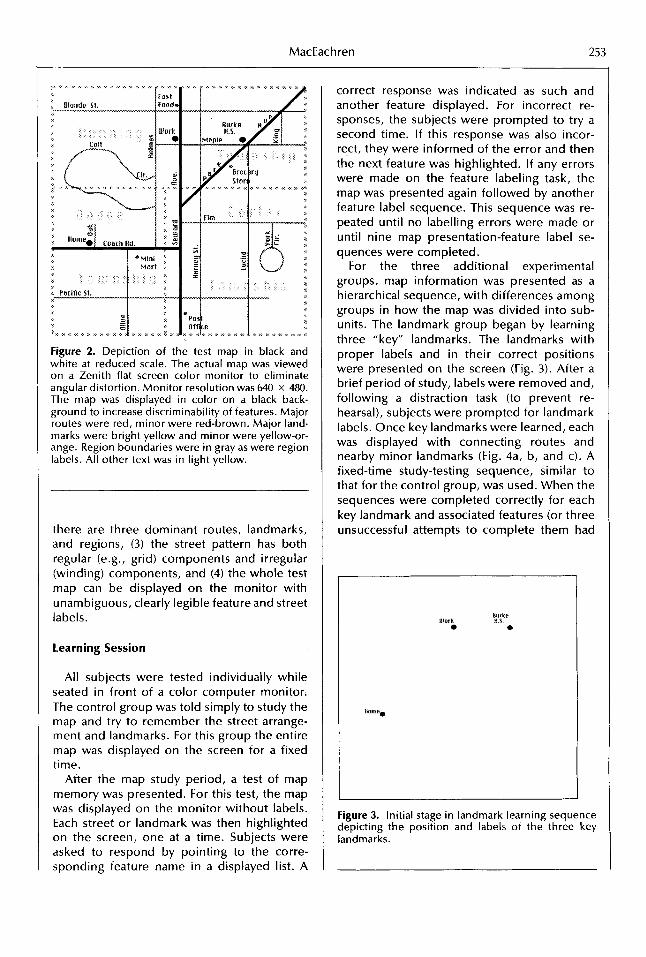
Figure 2. Depiction of the test map in black and white at reduced scale. The actual map was viewed on a Zenith flat screen color monitor to eliminate angular distortion. Monitor resolution was 640 x 480. The map was displayed in color on a black back- ground to increase discriminability of features. Major routes were red, minor were red-brown. Major land- marks were bright yellow and minor were yellow-or- ange. Region boundaries were in gray as were region labels. All other text was in light yellow.
there are three dominant routes, landmarks, and regions, (3) the street pattern has both regular (e.g., grid) components and irregular (winding) components, and (4) the whole test map can be displayed on the monitor with unambiguous, clearly legible feature and street labels.
learning Session
All subjects were tested individually while seated in front of a color computer monitor. The control group was told simply to study the map and try to remember the street arrange- ment and landmarks. For this group the entire map was displayed on the screen for a fixed time.
After the map study period, a test of map memory was presented. For this test, the map was displayed on the monitor without labels. Each street or landmark was then highlighted on the screen, one at a time. Subjects were asked to respond by pointing to the corre- sponding feature name in a displayed list. A
correct response was indicated as such and another feature displayed. For incorrect re- sponses, the subjects were prompted to try a second time. If this response was also incor- rect, they were informed of the error and then the next feature was highlighted. If any errors were made on the feature labeling task, the map was presented again followed by another feature label sequence. This sequence was re- peated until no labelling errors were made or until nine map presentation-feature label se- quences were completed.
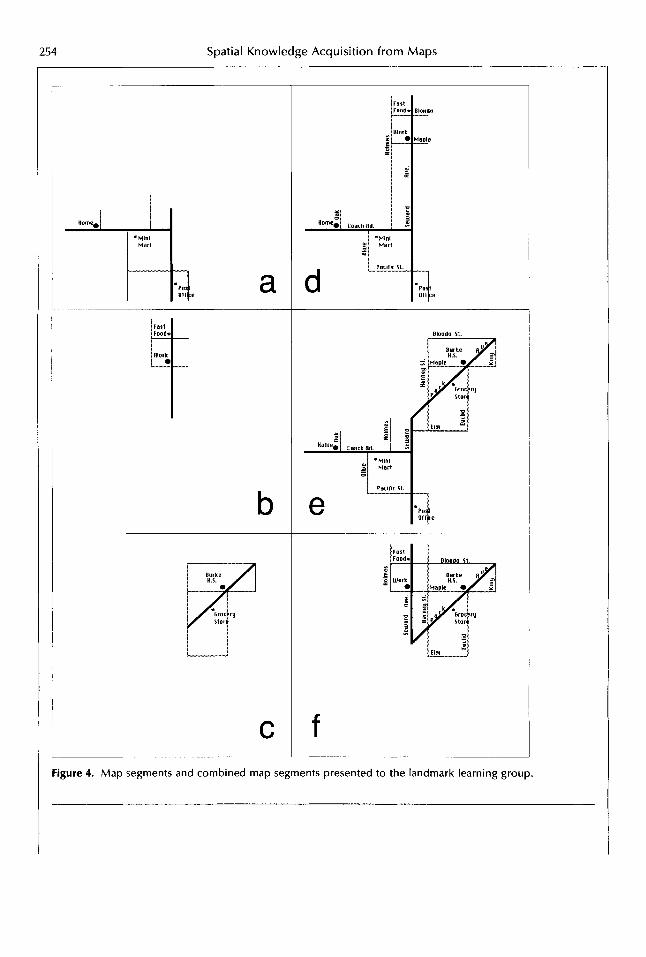
For the three additional experimental groups, map information was presented as a hierarchical sequence, with differences among groups in how the map was divided into sub- units. The landmark group began by learning three "key" landmarks. The landmarks with proper labels and in their correct positions were presented on the screen (Fig. 3). After a brief period of study, labels were removed and, following a distraction task (to prevent re- hearsal), subjects were prompted for landmark labels. Once key landmarks were learned, each was displayed with connecting routes and nearby minor landmarks (Fig. 4a, b, and c). A fixed-time study-testing sequence, similar to that for the control group, was used. When the sequences were completed correctly for each key landmark and associated features (or three unsuccessful attempts to complete them had
Ulork
Figure 3. Initial stage in landmark learning sequence depicting the position and labels of the three key landmarks.
254 Spatial Knowledge Acquisition from Maps
a
C
I
Blond0 It.
e
f Figure 4. Map segments and combined map segments presented to the landmark learning group.

MacEach ren 255
been made), pairs of key landmarks with their sets of nearby routes and minor landmarks were displayed and tested (Fig. 4d, e, and f ). Finally, the complete map was displayed and tested. Map study time increased as map infor- mation was added but decreased within each level of detail as that section was repeated due to labeling mistakes. Maximum map learning time if all possible study-test sequences were necessary was equal to that for the control group.
If the goal of this study was to simulate en- vironmental learning and compare possible strategies for that learning, the last step, in which subjects view the entire map, would not have been used. When learning a real environ- ment by behaving in it, this holistic view i s seldom available. In the present study, how- ever, the primary goal was to assess the poten- tial applicability of environmental learning the- ory to learning from maps, not to test the ability of people to mentally construct a survey representation from subcomponents. It was felt that a successful system for computer-as- sisted environmental learning would require an overview map to help people make the jump from disconnected fragments to a holistic representation. This assumption was based on evidence that even extended experience in an environment does not result in survey repre- sentations of that environment for all people (Lloyd 1989a). The experimental procedure used was designed to determine whether dif- ferent methods of sequential information pre- sentation (based on different aspects or forms of environmental learning theory) would in- duce different strategies for cognitive organi- zation of this final holistic representation.
The experimental procedure outlined above, of presenting the landmark group with frag- mentary to complete information, was also used with the route and region experimental groups. The route group was initially pre- sented with three “key“ labeled routes (Fig. 5). After brief study, labels were removed and sub- jects were prompted for the correct street names. This was repeated up to three times (if necessary) until correct labeling of all three key routes occurred. Once key routes were learned, routes were displayed together with their cross streets and adjacent landmarks (Fig. 6a, b, and c). Using a similar study-test se- quence to that above, the individual route-seg- ment sequence was followed by presentation
1 1
Figure 5. Initial stage in the route learning sequence depicting the position and labels of the three key routes.
of pairs of connecting routes and adjacent land- marks (Fig. 6d, e, and f ) . Again, the learning session concluded with a study-test sequence for the entire map.
The region group was initially presented with a map showing boundaries of three labeled regions (Fig. 7). A study-test sequence was used to insure that each region could be associated with its correct label. Once region positions were learned, each was displayed individually with all internal features (streets and land- marks) depicted (Fig. 8a, b, and c). As with the other groups, study-test sequences on pairs of regions were then used (Fig. 8d, e, and f ) , culminating with a study-test sequence for the map as a whole.
Testing Session
The second experimental session, on the fol- lowing day, began with a refresher learning session. This session was identical to that of the previous day except that study times were shorter with no repeats if errors were made. A brief questionnaire was then completed. The main purpose of the questionnaire was to act as a distractor t o prevent mental rehearsal of map information. One question was included to obtain information about the subject’s visu- alization abilities. Subjects were asked whether

256 Spatial Knowledge Acquisition from Maps
a
C Figure 6. Map segments and combined map segments presented to the route learning group.

MacEach ren 257
I
k 8
1 I
s E
I , % rn - * w - &a rn rn - m - m m m - - * Figure 7. Initial stage in the region learning group depicting the position and labels of the three key regions.
they rotate road maps to their direction of travel when navigating by automobile. The as- sumption behind this question is that those who do not physically rotate the map rotate their mental image of it while those who do rotate the map find such mental rotation difficult.
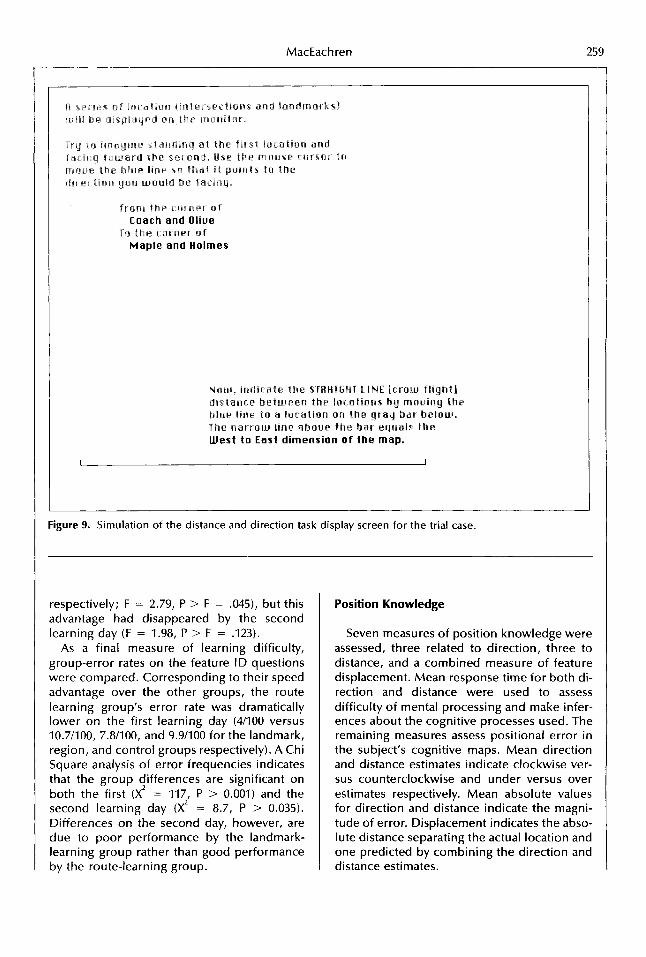
The questionnaire was followed by a se- quence of position estimation tasks designed to assess the subject's overall cognitive repre- sentation. Each subject completed twenty- eight distance and direction estimates between map locations (the first of which was a practice trial). A balanced range of distances and direc- tions was presented. For each estimate, a loca- tion (street intersection or landmark) was dis- played at the center of the screen. Subjects were prompted to indicate the direction and distance from that position to a second-named location. For direction, subjects used a mouse to rotate a pointer around the central feature until i t was directed toward the named location (Fig. 9). The pointer appeared in whatever di- rection the subject's first movement was and could then be rotated in either direction until the subject was satisfied with its position. For the distance estimate, subjects again used the mouse to provide a response. In this case, they were shown a line representing the map width. On a second (longer) line, they marked (using the mouse) the distance (in relation to the map width) from the displayed location to the named location. Correct and estimated dis-
tance and direction as well as response times for each estimate were recorded.
Analysis and Results
Analyses were divided into two components: map learning and position knowledge. Perfor- mances of subjects during the two learning ses- sions were analyzed to determine whether the map segmentation strategies had an influence on ease andlor speed of spatial knowledge ac- quisition. Performance on distance and direc- tion estimates that followed the learning ses- sions allowed both the influence of map learning strategies on cognitive maps and the kinds of distortion present in spatial knowledge acquired from maps to be assessed.
Map Learning
One estimate of learning effort was derived by measuring the total learning time needed for each subject and then determining mean learning times for each group. Learning time was fixed for each presentation of a map or map section. Total learning time for a subject was a direct function of the number of times each learning module had to be repeated be- fore the specified locations could be named with no mistakes. Differences in learning effort are conservative estimates because subjects who were not able to learn the map features for a particular learning module were moved on to the next module after three attempts. Map viewing time was identical (and held con- stant at 5.75 min.) for all groups in the learning session on the second day. On the first day, the route-learning group required the shortest mean learning time (7.9 min. compared to 9.3 for the landmark group, 9.2 for the region group, and 10.3 for the control group). An ANOVA (F = 5.40, P > F = .002) confirms that differences are significant.
A second assessment of learning effort was provided by examining the decision making (i.e., response) times for the map labeling questions presented following each map study module. Analysis of mean response times per feature ID task indicates that the route learning group was able to identify features more quickly on the initial learning day (with a mean reaction time of 5.8 sec. versus 7.0,6.2, and 6.8 for the landmark, region, and control groups

!58 Spatial Knowledge Acquisition from Maps
a
C Figure 8. Map segments and combined map segments presented to the region learning group.

260 Spatial Knowledge Acquisition from Maps
Table 1. Summary of Analysis of Variance for Direction
Response time Error Absolute error
Main effects F-Ratio P >F F-Ratio P > F F-Ratio P > F
3.43 42a 4.42 m
Group Orientation
Rotation (t) -0.83 ,408 Group*orientation 1.66 ,093 Group*length 0.63 ,710
Length 4.05 918
Group* rotation 6.56 &@Q
ANOVA was performed using the seven mea- sures of position knowledge as dependent variables. Four main effects and three interac- tion effects were considered for each ANOVA. The main effects were learning Group (three segmentation and one control), task Orienta- tion (whether the correct direction of the esti- mated location was in the north, east, south, or west quadrant in relation to the origin loca- tion), task length (grouped into the shortest 113, middle 113, and longest 1/3), and map Ro- tation (whether subjects indicated that they ro- tate road maps to align travel routes to their direction of travel when using them to navi- gate). Interaction effects for Group with each of the other main effects were also examined.
Direction. Contrary to expectations, and in contrast to the learning advantage that the route-segmentation group exhibited, the con- trol group had the lowest mean response times for direction estimates (14 sec.), with the route group being fastest among the segmentation groups (16.1 sec. versus 19 sec. for the land- mark group and 16.9 sec. for the region group). ANOVA indicates that variation among groups for direction response times is significant (Table 1 ) . Post hoc tests indicate that the con- trol group differs from the landmark group as well as from the combined set of segmentation groups, but that differences among segmenta- tion groups are not significant.
The control group was apparently able to access direction information from their cogni- tive representations more quickly than any of the segmentation groups. They may have been able to encode the map as a whole while the segmentation groups developed a hierarchical knowledge organization based on smaller re- gional divisions than necessary to encode and retrieve information efficiently. If information
1.36 ,259 1.27 .290 6.56 &QQQ 1.46 .224 0.65 ,524 18.80 ,000
-0.24 ,811 -2.56 912 1.47 ,152 1.25 ,258 1.18 ,313 2.11 1.23 .297 I .a2 .I41
is encoded hierarchically, estimates between locations in different regions should require longer to process than locations in the same region. This would result in a net increase in reponse time for the segmentation groups over the control group for whom all locations were effectively in one region. The control group might have been able to avoid subdivision of the knowledge acquired because the test map was relatively small with a limited number of features.
For the combined groups, there was a significant difference in response time for tasks depending on their Orientation (Fig. 10). Tasks in which subjects were asked to point in a northerly direction (toward the top of the map) were responded to most quickly and those to- ward the south resulted in the slowest re- sponse times. This result suggests that subjects actually visualized themselves standing at the first location (as they were asked to do), that their initial imagined orientation was toward the top of the map and that they visualized the act of turning their arm to point toward the second location.
Response times for direction tasks exhibited a significant inverse relationship to task length (Fig. 11). This decrease in response time with length supports the contention that subjects were using a visualization strategy to respond to the direction tasks. Small displacement er- rors for nearby locations produce much larger direction errors than do small displacement er- rors for distant locations (Fig. 12). If a person i s visualizing the map locations with a line con- necting them (to which the pointer must be aligned) and they realize that small displace- ment errors for nearby locations can produce large direction errors, they are likely to take greater care (and more time) to make these

MacEach ren 261
22 T
20: 18:
1 s t
141
12:
g 10'
u)
0
u) -,
I Direction response time .......... . iandmarlSI \ . .........
..................................
...
... control
......................................
......................................
4 ..................
2 .................. i j ....................
....................
north east south west Figure 10. Mean response times by task orientation for each test group.
Direction response time 22 ......................................
14 12
u)
..................................... \ landmark
.....
............ .....
con t ro I .................................... I H 1 q ................... ......... .......
8 ......................................
6 ......................................
4 ......................................
2 ......................................
0 short medium long
Figure 11. Mean response times by task length for each group.
estimates. In contrast, if all intralocation direc- tions were stored directly as propositions, re- sponse times would not vary with task length unless a hierarchical knowledge structure re- sulted in more effort to extract direction infor- mation between locations in different regions. Locations in different regions are usually far- ther apart, therefore, the Length-response time relationship would be the reverse of that found here.
Although no significant difference in re- sponse time for direction tasks was found be- tween those who rotate maps to their direction of travel and those who do not there was a significant Group*Rotation interaction (Fig. 13). In both the control and the landmark groups, those who physically rotate maps took longer to respond than those who apparently use mental rotation to match a map with the envi- ronment. For route and region learning groups, the opposite pattern resulted. The irn- plication is that those who are adept at mentally rotating a map image when traveling (the non- rotators) are also adept at visualizing the act of standing at one location and pointing toward another. For those who do not find it easy to mentally rotate maps (the rotators), the process of determining the direction of one map loca-
Figure 12. Relationship between displacement error and magnitude of direction error with distance sepa- rating locations. Displacements B-B' and C-C' are equal.

262 Spatial Knowledge Acquisition from Maps
v) -0 C 0 0 a v)
22
20
Direction response time
landmark I------
8
6 4
2
0 8
6
4
2
0 no Yes
Figure 13. Comparison of mean response time for rotators (yes) versus nonrotators (no).
tion from another is more difficult unless they have learned the map in a manner leading to a cognitive representation that does not re- quire mental rotation (i.e., propositional en- coding). As will be clear throughout the analy- sis, the landmark learning strategy did not work as well as the other two segmentation strategies. As a result, it did not provide the help to the "rotators" that the route and region segmentation strategies seem to have done.
Accuracy of direction estimates did not vary by Group in either direction or magnitude of errors. Orientation was, however, a significant effect for direction of direction error (Fig. 14). Tasks toward the north, east, and south pro- duced counterclockwise errors while those to- ward the west produced clockwise errors. It is likely that this difference i s due to the asym- metrical nature of the map learned.
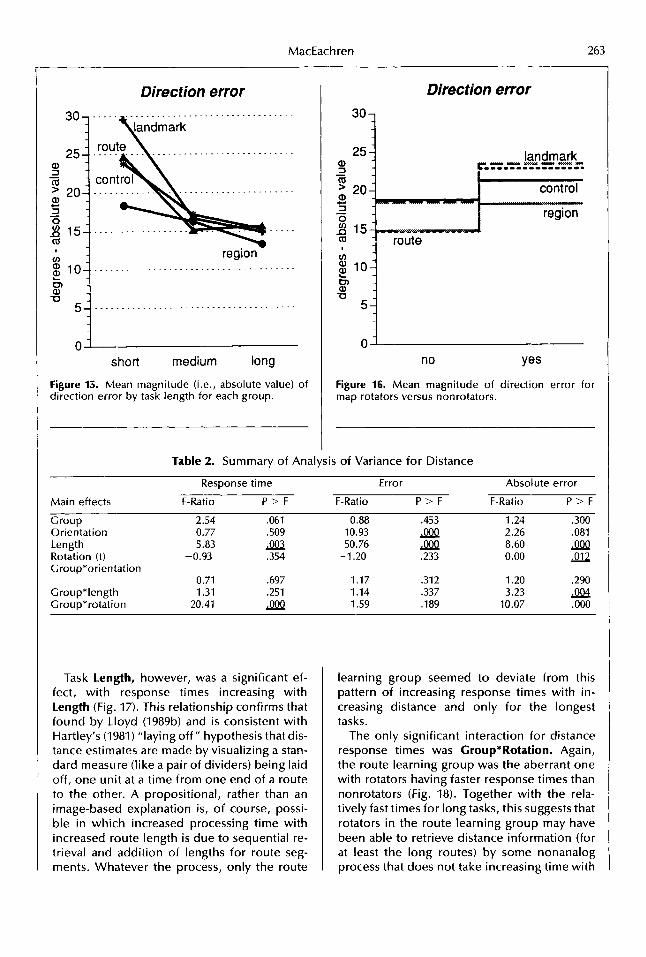
Task length was a significant effect for mag- nitude of direction errors (Fig. 15), with mag- nitude decreasing with length. This would be expected if a visualization strategy was used in which the position of the place was first lo- cated on an image of the map, then direction to it was estimated. As illustrated in Figure 12, constant position error results in decreasing direction error with distance. There was also a
,
Direction error 15 ......................................
10 ......................................
landrnarlf,
-1 0 ... ............................. route
-15 ....................................
north east south west
Figure 14. Mean direction error by task orientation for each group. Negative angles represent counter- clockwise errors, positive represent clockwise.
significant Grou p*length interact ion with the region group exhibiting a linear decrease in direction error with task length while other groups have a rapid decrease in error that lev- els off from medium to long tasks. Error mag- nitude was less for nonrotators (Fig. 161, a fur- ther indication that those who mentally rotate map images while traveling (instead of physi- cally rotating maps) found the visualization necesary to point from one map location to another easier than those who do not.
Distance. As with direction, the control group had the shortest response times for dis- tance estimates. In this case, the Group main effect was not significant at the 0.05 level of confidence (Table 2). The experimental design is probably responsible for this apparent lack of a control group advantage. All distance esti- mates were made immediately following direc- tion estimates for the same locations. Having extracted information from their cognitive rep- resentations concerning location of the two places would facilitate retrieval (or mental cal- culation) of distance information. Possibly for a similar reason, the Orientation effect appar- ent with direction response times was absent for distance response times.
MacEach ren 263
Direction error 30 _ _ _ . _ _ _ _ _ _ _ _ _ . _ _ _ _ _ . _ _ _ _ _ _ . _ . . . . . 1 handmark
region - . _ . _ _ _ _ . . . _ _ _ _ _ . _ _ _ _ . _ . . . . - . - . . -
I
0 short medium long
Figure 15. Mean magnitude (i.e., absolute value) of direction error by task length for each group.
Direction error
301
“‘i 5
”
lI0
Figure 16. Mean magnitude of direction error for map rotators versus nonrotators.
Table 2. Summary of Aria.,-is of Variance for Distance
Response time Error Absolute error
Main effects F-Ratio P > F F-Ratio P > F F-Ratio P > F
Group 2.54 ,061 0.88 .453 1.24 .300 Orientation 0.77 .SO9 10.93 m 2.26 ,081 Length 5.83 50.76 m 8.60 9eP Rotation (t) -0.93 .354 -1.20 .233 0.00 - .012 Croup*orientation
Group*length 1.31 ,251 1 .I4 .337 3.23 0.71 ,697 1.17 ,312 1.20 .290
Group*rotation 20.41 3.B 1.59 .I89 10.07 ,000
Task length, however, was a significant ef- fect, with response times increasing with length (Fig. 17). This relationship confirms that found by Lloyd (1989b) and i s consistent with Hartley’s (1981) “laying off” hypothesis that dis- tance estimates are made by visualizing a stan- dard measure (like a pair of dividers) being laid off, one unit at a time from one end of a route to the other. A propositional, rather than an image-based explanation is, of course, possi- ble in which increased processing time with increased route length is due to sequential re- trieval and addition of lengths for route seg- ments. Whatever the process, only the route
learning group seemed to deviate from this pattern of increasing response times with in- creasing distance and only for the longest tasks.
The only significant interaction for distance response times was Croup*Rotation. Again, the route learning group was the aberrant one with rotators having faster response times than nonrotators (Fig. 18). Together with the rela- tively fast times for long tasks, this suggests that rotators in the route learning group may have been able to retrieve distance information (for at least the long routes) by some nonanalog process that does not take increasing time with

!64 Spatial Knowledge Acquisition from Maps
Distance response time 22 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18 ......................................
16 ......................................
u) 12 1 4 j .............................
.............................
g 10 .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . landmark
8 . . . . . . . . . . . . . . .
6 . . . . . . . . . . . . . . . . control
4
2 ......................................
0 short medium long
Figure 17. Mean response time by task length for each group.
length (e.g., direct storage of relative distances from each remembered location to other loca- tions).
The findings support the dual coding hy- pothesis that suggests two processes, one image-based and one proposition-based, that work in parallel. The response, according to this model of cognitive processing, i s gener- ated by whichever method arrives at an answer first (Lloyd 1982). Response time using the lay- ing-off method necessarily increases with route length. The likelihood that a nonimagery strategy would prove successful in competition with imagery would increase with route length and be greatest for those persons for whom visualization i s most difficult and for whom the learning method favored a nonanalog knowl- edge structure.
Errors for short routes are overestimates while those for the longest routes are under- estimates (Fig. 19). This pattern corresponds to the implicit category scaling procedure hy- pothesized by-Holyoak and Mah (1982). They argue that distance estimates are made in working memory where only a small number of categories are possible. As a result, short distances are expanded while longer distances are compressed. Lloyd's (198913) subjects dem-
Distance response time
16 14
0
6 4px---
0' no Yes
Figure 18. Mean response time for rotators versus nonrotators for each group.
onstrated a similar pattern of distance errors. As Hartley (1981) would predict for judgments based on the "laying-off" method of distance estimation, absolute value of distance error ac- cumulates with task length (Fig. 20).'
In relation to task Orientation, northern tasks were overestimated while southern tasks were underestimated (Fig. 21). Although statis- tically significant, the difference may simply be the result of task length because the southern tasks were slightly longer than the northern.
N o interaction was significant for the sign of distance error. Both Croup*Length (see Figure 24) and Croup*Rotation (Fig. 22) were significant for magnitude of distance error. For all three segmentation groups, distance error increased with length. The control group, in contrast, exhibits large errors for short as well as long tasks, possibly indicating a different cognitive process for the control group sub- jects on the shortest tasks.
As with several other variables, the Croup*Rotation interaction for magnitude of distance error is related to differences in per- formance of the route learning group. The route group i s the only one for which map rotators make larger distance errors than non- rotators. This provides further evidence that

MacEach ren 265
1200- a, 3 - 9 1000:
Distance error 700 ......................................
1 ......................................
......................................
-500- ......................................
-700 ......................................
short medium long Figure 19. Mean distance error by task length for each group (100 map units i s approximately equal to the distance between Holmes and Seward Ave.).
Distance error 700 ......................................
500 ... .........................
-300 ......................................
-500 ......................................
-700 ......................................
north east s o u t h west i
Figure 20. Mean magnitude of distance error by task length for each group.
400 ...................................... a crr 200 ......................................
t
0 s h o r t medium long
Figure 21. Mean distance error by orientation for each group.
Distance error 1400 7
9 1200 i 1000
a, 3 - a, 3 0 v) D a
c -
I
v)
c 3
+- .- a E
600
route
200
0’ n o Yes
Figure 22. Mean magnitude of distance error for ro- tators versus nonrotators for each group.

66 Spatial Knowledge Acquisition from Maps
Table 3. Summary of Analysis of Variance for Displacement
- Absolute error
Main effects
Group Orientation Length Rotation (t) Group*orientation
Group*length Group*rotation
F-Rat i o
0.86 4.88
13.25 -1.67
0.49 0.76 5.55
P > F
,463 9a2 SQQ .098
.883 ,598 m
14001
Displacement ...........
landmark 1200
1000
v) .= 800 c 3 region
2 600 " 1 400 ...................................
200 ...................................
- north east south west
Figure 23. Mean linear displacement of derived loca- tion estimate from actual position by task orientation for each group.
learning a map through a developmental pro- cess based on routes leads to encoding and/or retrieval processes different from other meth- ods of map learning. Lloyd (1989b) has demon- strated larger distance errors for persons who use verbal (i.e., propositional) versus visual (i.e., imagery) encoding. The larger errors for rotators using the route learning strategy again support the contention that this strategy leads to propositional encoding for those who are inclined toward propositional versus image- based spatial problem solving.
Displacement. For displacement there is
Displacemen 1 1400, ......................................
v)
C 3 0.
c .-
E
200 ........................... /ontrol
000 . . . . . . . . . . . . .................
800 region . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
- short medium long
Figure 24. Mean linear displacement of derived loca- tion estimate from actual position by task length for each group.
no response-time measure. Displacement is a derived variable obtained by combining the di- rection and distance estimates to produce a predicted location. What results i s a measure of the distance between the actual and pre- dicted location for each place.
No significant among-Group difference was found for displacement, although the route and region groups had lower mean displace- ment than the landmark and control groups (Table 3). Orientation, however, was significant, with displacement increasing lin- early with divergence from north orientations (Fig. 23). This can be explained with an imagery argument in which the subject has stored a map image at a particular orientation. Informa- tion i s extracted more accurately when the sub- ject can imagine looking at the location being estimated in the original orientation rather than having to produce a mental rotation of the map or themselves. The significantly larger error for long versus short distances indicates that dis- placement i s due more to distance than to di- rection error (since direction error was found to decrease with distance) (Fig. 24). If displace- ment i s primarily a function of distance error, the orientation effect could be due to the slightly longer southern tasks. Southern tasks,

MacEach ren 267
Displacement 1400
1200
1000
a 600
400
* O O i "
no Yes Figure 25. Mean linear displacement of derived loca- tion estimate from actual position for rotators versus nonrotators for each group.
however, did not result in significantly greater error on distance alone.
The only significant interaction is for Croup*Rotation (Fig. 25). The route group again exhibits a rotator versus nonrotator pat- tern that is the opposite of that of the other groups. This follows if displacement is related more closely to distance than to direction error.
Summary and Discussion
This study provides insights about spatial knowledge acquisition and organization that are relevant to geographers and cartographers and at the same time highlights ties to cogni- tive, developmental, and environmental psy- chology. Subjects learned the layout of a typi- cal urban place depicted on a map. Learning by studying the map in its entirety was com- pared to learning using one of three segmen- tation strategies based on theories of en- vironmental knowledge acquisition and organization. After learning the map, subjects' cognitive representations of the place were evaluated using a series of direction and dis- tance estimates between locations depicted on
the map. Analyses focused on differences among learning groups, between good and poor visualizers, and for various task orienta- tions and lengths.
When learning strategies used map segmen- tation organized by major routes, learning was facilitated. The route learning group required less time than other groups to achieve perfect (or near-perfect) recognition of labeled fea- tures. Mean reaction times and error rates for the feature identification tasks indicated that the route segmentation group required less ef- fort to match labels with map locations. Path- based presentation did not interfere with learn- ing as Hanley and Levine (1983) had found in their route segmentation experiment in which the segments contained two subcomponents of only four contained in the entire map. Seg- mentation based on larger subcomponents ac- tually speeded learning. This supports the con- tention that size of the segments must be above some threshold to facilitate learning.
The advantages of route learning over the other strategies also corresponds to MacEachren and Johnson's (1987) historical, cross-cultural analysis of travel map formats from early Egyptian to modern times. They found a preference for strip (route) maps over survey (regional) maps as people settled and learned new environments, with highway (sur- vey) maps seen as more useful once an envi- ronment becomes familiar. This function, as a precursor to more complete survey-type depic- tions, indicates that map users and producers have seen route-based maps as particularly useful for new environments in which a trav- eler tries to memorize sections of a trip so that frequent stops to consult their map can be avoided.
In contrast to route-based segmentation, the map-segmentation group organized around major landmarks resulted in generally poor performance on all aspects of the experiment. This suggests that Golledge's anchor-point the- ory for environmental learning does not trans- fer to learning from maps, at least when an- chors are point features depicted with highly abstract point symbols and the learners are adults who have experienced all stages of spa- tial cognitive development. It i s possible that the poor performance did not result from a focus on landmarks, but from some other as- pect of map presentation for this group. Due to the small number of landmarks compared to

268 Spatial Knowledge Acquisition from Maps
streets, for example, the landmark-segmenta- tion group had less information on their initial learning modules and more on subsequent combined map segments. This difference in how much new information was presented at each stage in the learning sequence could be responsible for some of the differences be- tween the landmark group and the others. Yet another explanation for poor performance i s that landmark-based learning, although de- signed to lead to spatial hierarchies, may have stimulated nonspatial groupings as well (sim- ilar to those found by Hirtle and Jonides (1985). If so, this might lead to a decreased emphasis on, or distortion in, metric information and consequently lower performance on distance and direction tasks.
Analysis of position estimation data allows several generalizations to be made. The con- trol group, who viewed the entire map in all stages of learning, was able to retrieve (or con- struct) positional information from their cogni- tive representations more quickly than any of the segmentation groups. This advantage sup- ports Lloyd’s (1989a) finding that a short holis- tic map experience can be more effective than many partial encounters in developing a knowledge structure from which metric infor- mation can be readily accessed.
In addition to the influence of learning strat- egy on response times, task orientation, and length were significant factors. For direction estimates, response time increased away from north and for shorter tasks. Response time for distance estimates, in contrast, was not influenced by task orientation and increased with length. These results were all interpreted as indications that problem solving using imag- ery was dominant over propositional ap- proaches for solving these position estimation tasks. Only in those cases where subjects were judged to be poor visualizers and the learning mode favored propositional encoding (the route learning strategy) does a nonimagery ap- proach to the location task seem to have an advantage.
Forcing subjects to adopt a segmentation learning strategy seems to have little impact on accuracy with which locations can be recalled, except when that strategy emphasizes routes. For distance, only those interpreted as poor visualizers who also used the route learning strategy made larger errors. This suggests that, unless a map learning strategy prompts them
to use propositional encoding, even the poor visualizers store spatial information in a form that allows them to generate images of the map that provide relatively accurate distance infor- mation. For direction, those who are interpre- ted as having poor visualization (specifically mental rotation) abilities made larger errors re- gardless of how they learned the map.
Task orientation and length were significant factors in accuracy. For direction tasks, error magnitude decreased with length while it in- creased with length for distance tasks. In agree- ment with results of both Holyoak and Mah (1982) and Lloyd (1989b) using quite different learning procedures, distance was overesti- mated for the short tasks and underestimated for the long tasks.
An overall estimate of position knowledge is obtained by combining the direction and dis- tance estimate to determine total displacement of places estimated. Using this overall accuracy measure, error i s found to increase in direc- tions away from north and for longer tasks. The increasing error for directions away from north i s evidence for orientation specificity. No dif- ference in this orientation specificity was found between the control and segmentation groups. Because distance error contributes more to dis- placement than does direction error, the poor visualizers in the route learning group exhibit larger displacement errors than do other sub- jects.
Conclusions
Cognitive maps (spatial knowledge) and the process of cognitive mapping (spatial knowl- edge acquisition) are fundamental geographi- cal issues. The knowledge people have of their environment, and the role of media (i.e., maps, books, television, etc.) as a basis for that knowledge, is critical to their experience of, attitudes toward, and behavior in the environ- ment. Considerable recent attention has been directed specifically to knowledge acquired from maps (e.g., Wood and Fels 1986; Harley 1988; Lloyd 1989a; and Golledge 1991). This attention, in all cases, seems to result from an assumption that maps are powerful tools- whether “power“ i s interpreted in the context of critical social theory (and the power of gov- ernments to control knowledge) or in the con-

MacEac h ren 269
text of wayfinding (and the empowerment of blind individuals to move freely in the environ- ment).
Differences in secondary knowledge ac- quired from maps and other media versus di- rectly through environmental experiences need to be explored from a variety of perspec- tives. The research presented here approaches spatial knowledge acquisition from maps with the perspective of environmental learning the- ory. The goal i s to develop a better understand- ing of how spatial knowledge is filtered and structured by individuals as they acquire it from varied sources. This understanding has potential applications in a wide range of areas that include policy-oriented research in risk assessment and communication, development of visualization tools to help researchers deal with the massive space-time data sets to be generated by projects such as the Earth Obser- vation System, and design of wayfinding aids of various forms.
The study directly addresses one of the fun- damental questions about differences in map versus environment learning, whether differ- ences are due to viewing maps as a whole versus viewing a sequence of small fragments. It proved not to be part-versus-whole viewing but the focus on paths in conjunction with partitioning (segmentation) that produced the most dramatic differences. At least for some subjects, route learning apparently lead to a fundamentally different knowledge structure than other learning modes. Although it is pos- sible that different learning strategies are opti- mal for learning from the environment and from maps, it seems more likely that the route learning strategy that facilitated map learning here did so because it matches the most efficient strategy that has evolved for acquiring spatial information directly from the environ- ment. Subjects in the study, when faced with learning using the route-based strategy, prob- ably proceduralized the information by focus- ing on segments linked by choice points, rather than simply trying to memorize the route segments as a static plan view. With the other three presentation methods, there may have been less impetus to adopt a procedural approach to learning.
The advantage of route segmentation over landmark or region segmentation and the lack of orientation-specificity differences between the control and the test groups suggest that a
focus on areas versus routes rather than whole versus part might be the key factor leading to differences found by other researchers be- tween map and environment-derived cognitive representations. That few differences were found between the region segmentation and the control group corresponds with this expla- nation. Those in the control group, who had the most time to experience the holistic view, were able to access direction and distance in- formation from memory more quickly (al- though only direction information was significantly faster and no significant difference in accuracy was found). The contrast between a speed of learning advantage for route-based segmentation and a speed of access advantage for whole map learning emphasizes the import- ance of considering goals of environmental learning when assessing learning strategies.
In addition to issues of how cognitive repre- sentations derived from maps differ from those derived by direct experience, findings have im- plications for the debate concerning the form that cognitive representations take. Lloyd and Steinke (1985) have demonstrated that people can form mental images of information pro- vided on maps and that they scan these images to extract information from them. Lloyd (1989b) has also recently invoked an imagery argument to explain the increase in response time with increasing separation between places for which distance is estimated. Results here confirm this increase in response time with task length and provide further support that spatial problem solving based on knowledge acquired from maps can involve the use of imagery. In addi- tion, evidence i s presented for the use of im- agery in solving direction tasks that vary in ori- entation.
The evidence that map knowledge can lead to the use of imagery for solving spatial prob- lems does not mean that cognitive representa- tions derived from maps are necessarily image- like, nor that they contain only image information. Garling, et. al. (1985) have argued that cognitive maps may be both analog and propositional in format. This perspective agrees with the dual coding theory of spatial knowledge representation that suggests both imagery and propositional representations are processed in parallel in response to spatial problems (Lloyd 1982). The response obtained will be the one that i s available first. The inter- actions found here between learning proce-
70 Spatial Knowledge Acquisition from Maps
dure used and whether subjects were map ro- tators offer support for the dual coding theory.
Results also contribute to work on systematic distortion in cognitive representations. Leiser and Zilbershatz (1989) explain distortions in cognitive maps as consequences of their con- struction. These distortions are similar to what Lloyd (1989a) termed systematic distortion (er- rors that will be common to all subjects using the same knowledge organization or retrieval strategy). For subjects in the present study, a systematic directional bias was found, but it varied with task orientation. For distance, on the other hand, a consistent systematic bias comparable to that found by Lloyd (1989b) was apparent. Citing Holyoak and Mah’s (1982) the- ory of implicit category scaling for distance es- timates, Lloyd (198913) argues that the pattern of short distances being overestimated and long being underestimated is.a function of the cognitive decoding, rather than encoding, pro- cess. It therefore should be independent of the way information is acquired. Results here sup- port this contention by demonstrating a nearly identical distance error pattern for all four learning groups even though there is evidence that they encoded information differently.
In focusing on acquiring basic structural in- formation about a street pattern and associated landmarks, results of the present study are rel- evant to other research in behavioral geogra- phy. Garling (1989) argues that cognitive spatial representations have a key role in spatial deci- sion making. He also suggested that the inter- disciplinary research effort i s ”beginning to disentangle the important role cognitive maps probably play for spatial decisions” (Garling, et al. 1986).
Geographers and others have begun to ex- tend from graphic models of cognitive maps (in the form of composite sketches or multidi- mensional scaling solutions) to development 01 computational models of human spatial knowledge acquisition and decision making (Smith, et al. 1982; Golledge, et al. 1985). This work has dual goals of improving our under- standing of how humans come to know and behave in their environment and developing navigation tools for aiding travelers or guiding autonomous vehicles.
Gopal, et al. (1989) developed a computa- tional model of spatial knowledge acquisition and wayfinding that assumes propositional en- coding. This may be reasonable for learning directly from the environment with no visual
media available, which is what the authors were trying to model. If Garling, et al. (1985) are right, however (that media play a significant role in early spatial knowledge acquisition), then this model will not provide a valid repre- sentation of spatial problem solving for wayfinding by humans in a real environment. One possibly fruitful direction for future re- search i s to design a computational model that explicitly includes both propositional and im- agery-based spatial decision making. A simula- tion of learning that compares segment by seg- ment with whole map learning and applies both to a wayfinding task would be particularly enlightening.
In addition to developing computational models of environmental learning, a number of authors have suggested that we should be able to take advantage of interactive computers to facilitate human learning (e.g., Slocum 1988). The present study has demonstrated that using interactive computer technology to direct a map user’s learning process, by tailoring map presentation to specific learning strategies, has an impact on the efficiency and accuracy of map learning and on the cognitive structures used to organize information obtained. These results have implications for all situations in which improvement in spatial knowledge ac- quisition i s a goal and are particularly relevant to development of tools for computer-assisted geographic instruction.
Consideration of the sequence of informa- tion presentation is one obvious area to pursue (Taylor 1987; Slocum 1988). Leiser and Zilbershatz (1989) argue, for example, that what i s learned first will influence how subsequent knowledge is organized. Their computational model allowed them to demonstrate the likeli- hood of this contention and results detailed above provide empirical support. One re- search topic in computer-assisted instruction that deserves greater attention, therefore, is the relative advantages of sequential informa- tion presentation based on spatial versus attri- bute groupings. Research thus far in a non- computer environment suggests that spatially segmented sequencing i s likely to be more ef- fective than sequencing based on similar fea- tures (Shimron 1978).
Implementing the interactive information presentation strategies tried here can also pro- vide a test of the extensibility of current theo- ries of environmental knowledge acquisition to general questions of spatial knowledge extrac-

MacEach ren 271
tion from visual displays used for scientific vi- sualization. Golledge and Stimson (1987) sug- gest a ”transactionally-based” hypothesis of spatial knowledge acquisition. How a person interacts with the city i s thought to control the type of knowledge acquisition. This perspec- tive i s likely to apply to interaction with visual- ization tools as well. One possible topic for research i s to examine the role of multiple pre- sentations of the same data (through changes in color, classification, symbolizing, etc.) on hypothesis generation by analysts investigating the data. One step in this direction i s research by Carstensen (1986) that examines the impact of changes in methods for depicting pattern correspondence on hypotheses generated about that correspondence.
Another important potential application of the approach taken here is to spatial knowl- edge acquisition and wayfinding by the visually impaired. The assumption that the visually im- paired cannot develop workable spatial repre- sentations has been attacked by several re- searchers (e.g., Kerr 1983). Recent evidence suggests that the process of spatial knowledge acquisition i s slower for the visually impaired, but that they can develop cognitive represen- tations comparable to their sighted counter- parts (Passini et al. 1990). Although the visually impaired may or may not be able to generate mental figural representations (i.e., mental pic- tures), considerable evidence exists that they can develop integrated “cognitive maps” of en- vironments. Rossano and Warren (1989) identified similar alignment heuristics for visu- ally impaired map learners to that previously found for sighted persons, and Lederman et al. (1985) provide evidence that blind subjects who learn routes haptically are capable of gen- erating survey-type representations when they are required to make relative location esti- mates.
Klatzky and her colleagues (1990) found that in the absence of vision, subjects were able to develop cognitive representations of space sufficient for retracing a path or estimating dis- tance. Her sighted but blindfolded subjects, however, were not able to achieve survey-level representations sufficient for planning short cuts. Andrews (1983) found that when learning an environment the visually impaired face the greatest difficulty in making this transition from a “route oriented pespective to a spatial one.” She demonstrated that use of tactual maps that allow a visually impaired person to
explore the overall structure of an environment can provide considerable help in making this transit ion.
The visually impaired can only obtain map information in segments, and evidence sug- gests that they favor propositional encoding (e.g., memorization of the sequence of deci- sion points along a particular route segment). Results presented here indicate that even sighted subjects can learn a city layout more easily if information is presented in a sequence of route-based segments that, at least for some sighted subjects, seems to lead to propositional encoding. The advantages of route-based infor- mation for the visually impaired has been rec- ognized by Golledge (1991) who recently pro- posed disposable tactual strip maps that can be produced on demand as navigation aids. An- other potential topic for extended research i s to investigate whether a developmentally- based segmentation strategy focusing on routes (presented in the form of these tactual strip maps) would be effective for helping the visually impaired learn the layout of environ- ments.
Traditions of geographic research on cogni- tive mapping and cartographic research on im- proving map effectiveness have been inte- grated in the present research. The potential to apply the perspective derived to the topic of wayfinding offers exciting possibilities for fur- ther research directed to both visually impaired and sighted travelers. Geographers have begun to make contributions in the area of vehicle navigation aids, both in terms of building databases for navigation systems and with re- search into the kinds of navigation aids that automobile drivers find effective (Mark and McCranaghan 1988). In addition, Golledge and his colleagues (1990) have experimented with portable CIS-based navigation aids for visually impaired pedestrians. To take advantage of new technology for providing navigation assis- tance, we must improve our understanding of how spatial knowledge is acquired from maps and other media and how that knowledge i s applied to wayfinding.
Acknowledgment
Support for this research was provided by a grant from the National Science Foundation (#SES-8722310), an NSF supplement through the Research Experience for Undergraduates Program, and by a Faculty Research Grant from

72 Spatial Knowledge Acquisition from Maps
the College of Earth & Mineral Sciences,, Penn State University. The author would also like to extend appreciation to Phil Muehrcke for his suggestion to ask subjects whether they rotate maps when traveling, to Roger Downs for in- sightful comments at various stages of the proj- ect, to Ann Deakin, Jeremy Crampton, Wen Yao Lee, and Mark Lietzell for their contribu- tions to computer software development, data collection, and analysis, and to one of the re- viewers who provided particularly valuable commentary.
Notes
7 . 'The overestimation of short distances and under- estimation of long distances has often been ac- cepted as evidence for a power function relation- ship rather than as evidence for category scaling (by me as well as others) (MacEachren 1980). A power function argument is incongruous with Hartley's laying-off hypothesis. With a power function, however, absolute value of distance error should be lowest for medium distances. This i s only true here for the control group, therefore, category scaling seems more plausible than a power function model and Hartley's hypothesis cannot be discounted.
References
Acredolo, Linda P. 1981. Small- and large-scale spatial concepts in infancy and childhood. In Spatial representation and behavior across the life span: Theoryandapplication, ed. L. S . Liben, A. H. Patterson, and N. Newcombe, pp. 63-81. New York: Academic Press.
Allen, C . L. 1981. Developmental perspective on the effects of subdividing macrospatial experi- ence. Journal o f Experimental Psychology: Human Learning and Memory 7:120-52.
Andrews, Sona. 1983. Spatial cognition through tactual maps. In Proceedings o f the First Interna- tional Symposium on Maps and Graphics for the Visually Handicapped, ed. Joseph Wiedel, pp. 30-40. Washington: Association of American Ge- ographers.
Appleyard, D. 1970. Styles and methods of struc- turing a city. Environment and Behavior 2:10& 16.
Canter, David, and Tagg, Stephen K. 1975. Dis- tance estimation in cities. Environment and Be- havior 7(10):59-79.
Carstensen, Laurence W. 1986. Hypothesis testing using univariate and bivariate choropleth maps. The American Cartographer 13(3):231-51.
Chase, W. C. 1983. Spatial representation of taxi drivers. In The acquisition o f symbolic skills, ed. D. A. Rogers and J. A. Sloboda, pp. 391405. New York: Plenum Press.
Clayton, Keith, and Woodyard, M. 1981. The ac- quisition and utilization of spatial knowledge. In Cognition, social behavior, and the environment, ed. J . Harvey, pp. 151-61. Hillsdale, NJ: Lawrence Erlbaum Associates.
Couclelis, H., et al. 1987. Exploring the anchor- point hypothesis of spatial cognition. Journal o f Environmental Psychology 7: 99-1 22.
Devlin, Ann S. 1976. The "small town" cognitive map: Adjusting to a new environment. In Envi- ronmental knowing: Theories, research, and methods, ed. Gary T. Moore and Reginald G. Golledge, pp. 58-66. Stroudsburg, PA: Dowden, Hutchinson, & Ross.
Evans, C. W.;Marrero, D. C.; and Butler, P. A. 1981. Environmental learning and cognitive mapping.
Environment and Behavior 13(1) :83-104. - and Pezdek, K. 1980. Cognitive mapping:
knowledge of real-world distance and location. Journal o f Experimental Psychology: Human Memory and Learning 6:13-24.
Carling, Tommy. 1989. The role of cognitive maps in spatial decisions. Journal o f Environmental Psy- chology 9:269-78.
-; Book, A.; and Lindberg, E. 1985. Adult's spatial memory representations of the spatial properties of their everyday physical environ- ment. In The development o f spatial cognition, ed. R. Cohen, pp. 141-84. Hillsdale, NJ: Law- rence Erlbaum Associates.
1981. Memory for the spatial layout of the everyday physical environment: Factors affecting rate of acquisition. Journal o f Environmental Psychology 1 : 263-77.
tation in buildings: Effects of familiarity, visual access, and orientation aids. Journal o f Applied Psychology 68; 177-86.
The spatiotemporal sequencing of everyday ac- tivities in the large-scale environment. Journal o f Environmental Psychology 6 : 261 -80.
Colledge, R. C. 1978. Learning about urban envi- ronments. In Timing space and spacing time, ed. T. Carlstein, D. Parkes, and N. Thrift, vol. 1, pp. 76-98. London: Edward Arnold.
-. 1991. Tactual strip maps as navigational aids. Journal o f Blindness and Vision Impairment, forthcoming. , Flury, A.; and Yang, X. 1. 1990. Navigation
without sight: Components o f an automated per- sonal guidance system. Reprint Series. Goleta, CA: Santa Barbara Geographical Press.
and Spector, A. N. 1978. Comprehending the urban cognitive environment: Theory and practice. Geographical Analysis 10:403-26.
and Stimson, Robert J. 1987. Spatial cogni- tion. In Analytical behavioral geography, pp. 52- 83. London: Croom Helm.
-; -* , Lindberg, E.; and Nilsson, T.
-. , Lindberg, E.; and Mantyla, T. 1983. Orien-
-* , Saisa, 1.; Book, A.; and Lindberg, E. 1986.

MacEachren 273
-, et al. 1985. A conceptual model and em- pirical analysis of children‘s acquisition of spatial knowledge. Journal o f Environmental Psychol- ogy 5 : 125-52.
NAVIGATOR: A psychologically based model of environmental learning through navigation. Journal o f Environmental Psychology 9:309-31.
Hanley, Gerald L., and Levine, Marvin. 1983. Spa- tial problem solving: The integration of inde- pendently learned cognitive maps. Memory &
Harley, J. B. 1988. Maps, knowledge, and power. In The iconography o f landscape, ed. D. Cos- grove and S. Daniels, pp. 277-312. Cambridge: Cambridge University Press.
Hart, R. A., and Moore, G. T. 1973. The develop- ment of spatial cognition: A review. In Image and environment, ed. R. M. Downs and D. Stea, pp. 246-88. London: Arnold.
Hartley, A. 1981. Mental measurement of line length. Journal o f Experimental Psychology: Human Perception and Performance 7:309-17.
Hirtle, Stephen C., and Jonides, John. 1985. Evi- dence of hierarchies in cognitive maps. Memory and Cognition 1 3 (3) : 208-1 7.
Holyoak, K. J., and Mah, W. A. 1982. Cognitive reference points in judgments of symbolic mag- nitude. Cognitive Psychology 14: 328-52.
Howard, J. H., and Kerst, S. M. 1981. Memory and perception of cartographic information for famil- iar and unfamiliar environments. Human factors
Kerr, N. H. 1983. The role of vision in “visual imagery” experiments: Evidence from the con- genitally blind. Journal o f Experimental Psychol- ogy: General 112(2):265-77.
Klatsky, R. L., et al. 1990. Acquisition of survey and route knowledge in the absence of vision. Jour- nal o f Motor Behavior 22:19-43.
1982. Interpretive framework and memory for map features. The American Cartographer 9:141-47.
Lederman, Susan J.; Klatzky, Roberta 1.; and Barber, Paul 0. 1985. Spatial and movement-based heuristics for encoding pattern information through touch. Journal o f Experimental Psychol- ogy: General 114(1):33-49.
Leiser, David, and Zilbershatz, Avishai. 1989. The traveler: A computational model of spatial net- work learning. Environment and Behavior 21 :435-63.
Levine, M.; Jankovic, I.; and Palij, M. 1982. Prin- ciples of spatial problem solving. Journal o f Ex- perimental Psychology: General 111 :157-75.
Lindberg, Erik, and Carling, Tommy. 1987. Mem- 1 ory for spatial location in two-dimensional ar-
rays. Acta Psychologica 64:151-66. ~ Lloyd, R. 1982. A look at images. Annals o f the
Association of American Geographers 72:53248.
Copal, S.; Klatzky, R. L.; and Smith, T. R. 1989.
Cognition 11 ~415-22.
23 1495-504.
Kulhavy, R.; Schwartz, N.; and Shana, S.
-. 1989a. Cognitive maps: Encoding and de- coding information. Annals o f the Association o f American Geographers 79:lOl-24.
-. 1989b. The estimation of distance and di- rection from cognitive maps. The American Car- t ograph er l 6(2) : l 09-22.
and Steinke, T. 1985. Comparison of quali- tative point symbols: The cognitive process. The American Cartographer 12:156-68. - and -. 1986. The identification of re-
gional boundaries on cognitive maps. The Pro- fessional Geographer 38:149-59.
MacEachren, Alan M. 1980. Travel time as the basis of cognitive distance. The Professional Geogra- pher 32:30-36. - and Johnson, C. B. 1987. The evolution,
application and implications of strip format travel maps. The Cartographic Journal 24:147-58.
McNamara, Timothy P.; Hardy, James K.; and Hirtle, Stephen C. 1989. Subjective hierarchies in spa- tial memory. Journal o f Experimental Psychology: Learning, Memory, and Cognition 15(2):211-17.
Maki, R. H. 1981. Categorization and distance ef- fects with spatial linear orders. Journal o f Exper- imental Psychology: Human Learning and Mem- ory 7:15-32.
Mark, David W., and McCranaghan, Matthew. 1988. Map use and map alternatives: An experiment
in intraurban navigation. The Canadian Geogra- pher 32:69-75.
Moore, C. T. 1976. Theory and research on the development of environmental knowing. In En- vironmental knowing: Theories, research, and methods, ed. Gary T. Moore and Reginald G. Golledge, pp. 138-64. Stroudsburg, PA: Dow- den, Hutchinson, & Ross.
Okabe, Atsuyuki; Aoki, Ken; and Hamamoto, Wataru. 1986. Distance and direction judge- ment in a large-scale natural environment: Ef- fects of a slope and winding trail. Environment and Behavior 18(6):755-72.
Pacione, Michael. 1983. The temporal stability of perceived neighborhood areas in Glasgow. The Professional Geographer 35:66-72.
Passini, R.; Proulx, G.; and Rainville, C. 1990. The spatio-cognitive abilities of the visually impaired population. Environment and Behavior 22(1):91- 118.
Distance cognition by taxi drivers and the gen- eral public. Journal o f Environmental Psychology
Peterson, M. P. 1985. Evaluating a map’s image. The American Cartographer 12:41-55.
Peuquet, Donna, J. 1988. Representations of geo- graphic space: Toward a conceptual synthesis. Annals o f the Association o f American Geogra- phers 78~373-94.
Piaget, J., and Inhelder, B. 1956. The child’s con-
Peruch, T.; Ciraudo, M-D.; and Carling, T. 1989.
9(3):233-39.

274 Spatial Knowledge Acquisition from Maps
ception of space. London: Routledge & Kegan Paul. ; -; and Szeminska, A. 1960. The
child‘s conception of geometry. London: Routledge & Kegan Paul.
Rossano, M. I., and Warren, D. H. 1989. The im- portance of alignment in blind subject’s use of tactual maps. Perception 18:805-16.
1980. Reference points in spatial cognition. Journal of Experimental Psychology: Human Learning and Memory 5:516-28.
Shimron, Joseph. 1978. Learning positional infor- mation from maps. The American Cartographer 5 :9-19.
Siegel, A. W., and White, S. H. 1975. The devel- opment of spatial representations of large-scale environments. In Advances in child develop- ment and behavior, ed. H. W. Resse, pp. 10-55. New York: Academic Press.
Slocum, Terry A. 1988. Developing an information system for choropleth maps. Proceedings of the Third International Symposium on Spatial Data Handling, August 17-19, 1988, Sydney, Australia, pp. 293-305.
Smith, 1. R.; Pellegrino, J. W.; and Colledge, R. C. 1982. Computational process modeling of spa- tial cognition and behavior. Geographical Analy-
Stea, D. 1976. The measurement of mental maps: An experimental model for studying conceptual spaces. In Behavioral problems in geography,
Sadalla, E. K.; Burroughs, W. J.; and Staph, 1. J.
sis 14:305-25.
ed. K. Cox and R. Golledge, pp. 228-53. Evans- ton, IL: Northwestern Studies in Geography.
Stevens, Albert, and Coupe, Patty. 1978. Distor- tions in judged spatial relations. Cognitive Psy- chology 10: 422-37.
Taylor, D. R. F. 1989. New perspectives on cartog- raphy. Cartographic Perspectives l(4) :24-29.
Thorndyke, Perry W., and Stasz, Cathleen. Individual differences in procedures for knowl- edge acquisition from maps. Cognitive Psycho/- ogy 12:137-75.
and Hayes-Roth, Barbara. 1982. Differences in spatial knowledge acquired from maps and navigation. Cognitive Psychology 14:560-89.
Tolman, E. C. 1958. Behavior and psychological man: Essays in motivation and learning. Berkeley, CA: University of California Press.
Tversky, Barbara. 1981. Distortions in memory for maps. Cognitive Psychology 13:407-33.
Wood, Denis, and Fels, John. 1986. Designs on signs: Myth and meaning in maps. Cartographica 23(3) : 54-103.
Zeigler, Donald J.; Johnson, James H., Jr.; and Brunn, Stanley D. 1983. Technological haz- ards. Resource Publications in Geography. Wash- ington: Association of American Geographers.
Zelinsky, Wilbur. 1980. North America’s vernacular regions. Annals of the Association of American Geographers 70: 1-1 6.
1980.
Submitted 7/90, revised 7/91, accepted 8191.