anna yershova thesis defense dept. of computer science, university of illinois august 5, 2008
DESCRIPTION
Sampling and Searching Methods for Practical Motion Planning Algorithms. Anna Yershova Thesis Defense Dept. of Computer Science, University of Illinois August 5, 2008. Anna Yershova. Thesis Defense. Introduction. Presentation Overview. Introduction Motion Planning - PowerPoint PPT PresentationTRANSCRIPT
Anna Yershova
Thesis Defense
Dept. of Computer Science, University of Illinois
August 5, 2008
Sampling and Searching Methodsfor Practical Motion Planning Algorithms
Anna YershovaAnna Yershova Thesis Defense

IntroductionIntroduction Motion Planning Incremental Sampling and Searching (ISS) Framework Thesis Overview
Technical Contributions Nearest Neighbor Searching Uniform Deterministic Sampling Guided Sampling
Conclusions and Discussion
IntroductionIntroduction
Presentation OverviewPresentation OverviewPresentation OverviewPresentation Overview
Anna YershovaAnna Yershova Thesis Defense

Given:
• , ,
• Initial and goal configurations
Extensions:
Task: Compute a collision free path that connects initial and goal
configurations
IntroductionIntroduction Motion Planning
The Motion Planning ProblemThe Motion Planning ProblemThe Motion Planning ProblemThe Motion Planning Problem
Anna YershovaAnna Yershova Thesis Defense
[J. Cortes]

Given:
• , ,
• Initial and goal configurations
Extensions:
Task: Compute a collision free path that connects initial and goal
configurations
IntroductionIntroduction Motion Planning
The Motion Planning ProblemThe Motion Planning ProblemThe Motion Planning ProblemThe Motion Planning Problem
Anna YershovaAnna Yershova Thesis Defense

Conceptually simple, but in reality…
• obstacles in C-spaces are not explicitly defined
• they are described by an astronomical number of geometric primitives
• free C-spaces have complicated topologies
• feasible configurations may lie on lower dimensional algebraic
varieties, which are also not explicitly defined
IntroductionIntroduction Motion Planning
The Motion Planning ProblemThe Motion Planning ProblemThe Motion Planning ProblemThe Motion Planning Problem
Anna YershovaAnna Yershova Thesis Defense

Automotive Assembly
IntroductionIntroduction Motion Planning
ApplicationsApplicationsApplicationsApplications
Anna YershovaAnna Yershova Thesis Defense
[Yershova, et. al., 2005]Courtesy of Kineo CAM
The solution path traverses a narrow passage in SE(3)
[Yershova, et. al., 2005]Courtesy of Kineo CAM
The solution path traverses a narrow passage in SE(3)
Automotive Assembly
Computational Chemistryand Biology
IntroductionIntroduction Motion Planning
ApplicationsApplicationsApplicationsApplications
Anna YershovaAnna Yershova Thesis Defense
[Yershova, et. al., 2005]Courtesy of LAAS
330 dimensional C-space
[Yershova, et. al., 2005]Courtesy of LAAS
330 dimensional C-space

Automotive Assembly
Computational Chemistryand Biology
Manipulation Planning
Medical applications
Computer Graphics(motions for digital actors)
Autonomous vehicles andspacecrafts
IntroductionIntroduction Motion Planning
ApplicationsApplicationsApplicationsApplications
Anna YershovaAnna Yershova Thesis Defense
courtesy of Volvo Cars and FCCcourtesy of Volvo Cars and FCC
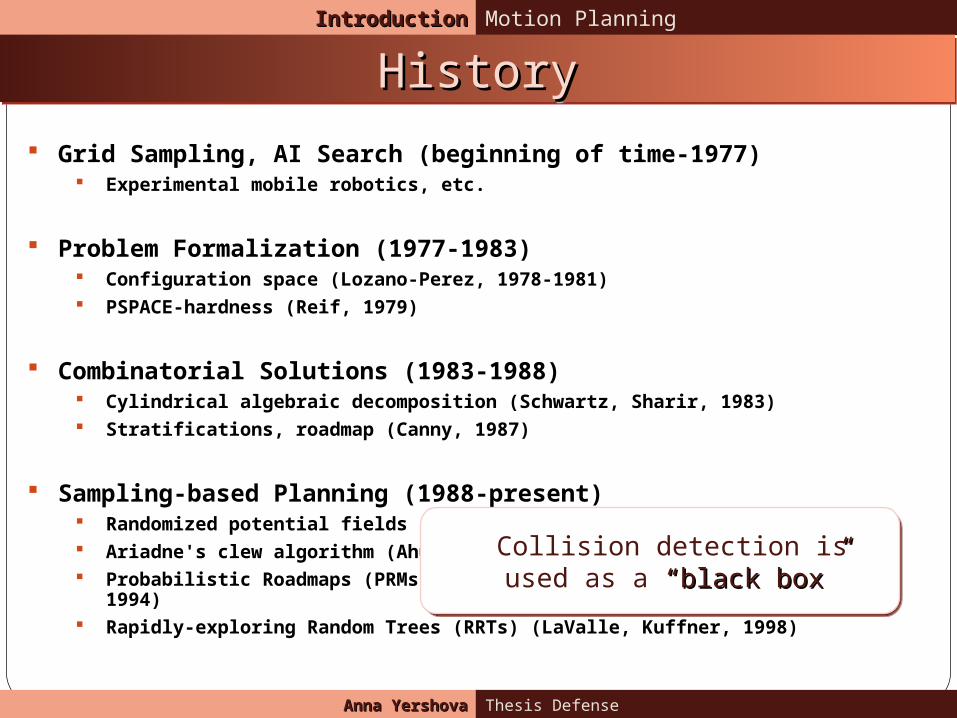
Grid Sampling, AI Search (beginning of time-1977) Experimental mobile robotics, etc.
Problem Formalization (1977-1983) Configuration space (Lozano-Perez, 1978-1981) PSPACE-hardness (Reif, 1979)
Combinatorial Solutions (1983-1988) Cylindrical algebraic decomposition (Schwartz, Sharir, 1983) Stratifications, roadmap (Canny, 1987)
Sampling-based Planning (1988-present) Randomized potential fields (Barraquand, Latombe, 1989) Ariadne's clew algorithm (Ahuactzin, Mazer, 1992) Probabilistic Roadmaps (PRMs) (Kavraki, Svestka, Latombe, Overmars,
1994) Rapidly-exploring Random Trees (RRTs) (LaValle, Kuffner, 1998)
IntroductionIntroduction Motion Planning
HistoryHistoryHistoryHistory
Anna YershovaAnna Yershova Thesis Defense
Collision detection is used as a “black box”“black box”
Collision detection is used as a “black box”“black box”
xgoal
xinit
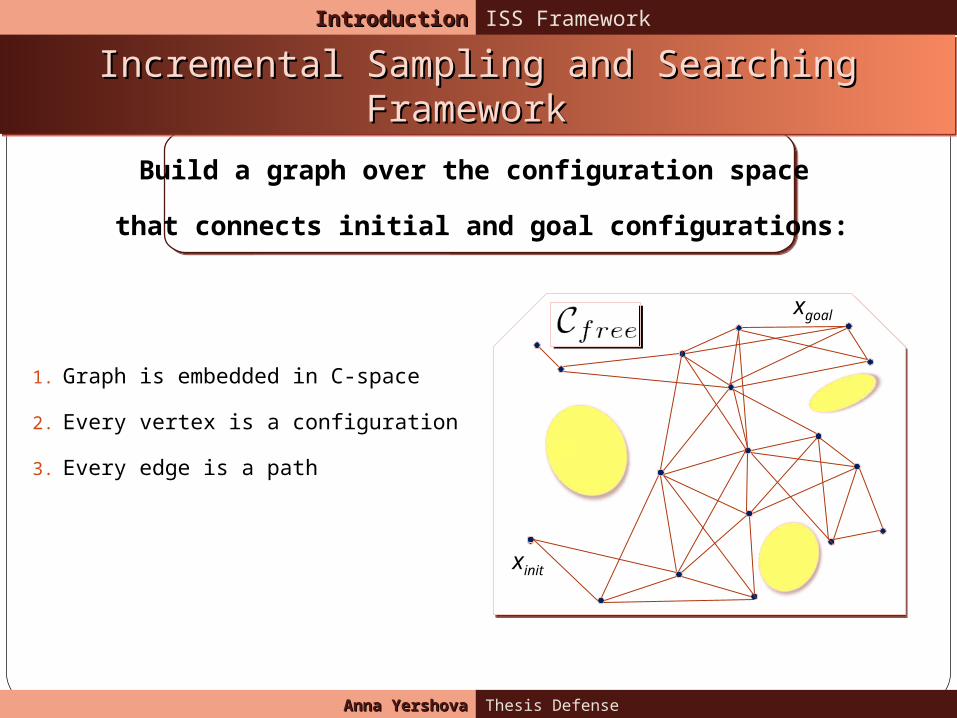
Build a graph over the configuration space
that connects initial and goal configurations:
1. Graph is embedded in C-space
2. Every vertex is a configuration
3. Every edge is a path
IntroductionIntroduction ISS Framework
Incremental Sampling and Searching Framework Incremental Sampling and Searching Framework Incremental Sampling and Searching Framework Incremental Sampling and Searching Framework
Anna YershovaAnna Yershova Thesis Defense

IntroductionIntroduction ISS Framework
Typical ArchitectureTypical ArchitectureTypical ArchitectureTypical Architecture
Anna YershovaAnna Yershova Thesis Defense
Uniform SamplingUniform Sampling
Guided SamplingGuided Sampling
Nearest Neighbor SearchNearest Neighbor Search
Collision DetectionCollision Detection
Path Exists ?Path Exists ?no yes
Solution
path
Input
geometry
Thesis OverviewIntroductionIntroduction
Central ThemeCentral ThemeCentral ThemeCentral Theme
Anna YershovaAnna Yershova Thesis Defense
The performance of motion planning algorithms can be significantly improved by identifying and addressing the key issues in sampling and searching framework.
ISSUES ADDRESSED:
•efficient nearest-neighbor computations•uniform deterministic sampling over configuration spaces•guided sampling for efficient exploration
Thesis Overview:Thesis Overview:
Chapter 1: Introduction
Chapter 2: ISS Framework
Chapter 3: Nearest Neighbor Search
Chapter 4: Uniform Sampling
Chapter 5: Guided Sampling
Introduction Motion Planning ISS Framework Thesis Overview
Technical Contributions Nearest Neighbor SearchingNearest Neighbor Searching Uniform Deterministic Sampling Guided Sampling
Conclusions and Discussion
Presentation OverviewPresentation OverviewPresentation OverviewPresentation Overview
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Nearest Neighbor Search
MotivationMotivationMotivationMotivation
Anna YershovaAnna Yershova Thesis Defense
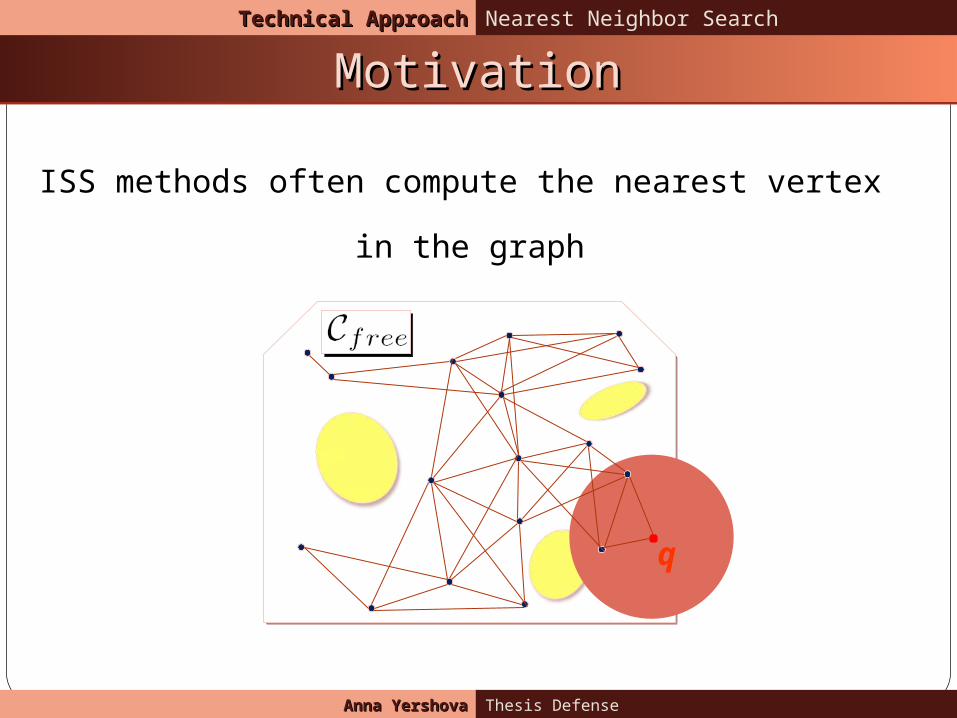
ISS methods often compute the nearest vertex
in the graph
Technical ApproachTechnical Approach Nearest Neighbor Search
q
Problem FormulationProblem FormulationProblem FormulationProblem Formulation
Anna YershovaAnna Yershova Thesis Defense
Given: a d-dimensional manifold, T, and a set of data points in T
Goal: preprocess these points so that, for any query point q in
T, the nearest data point to q can be found quickly
Manifolds of interest:
Technical ApproachTechnical Approach Nearest Neighbor Search
• Euclidean space, [0,1]d
• Spheres, Sd
• Projective space, R P3
• Cartesian products of the above
Problem FormulationProblem FormulationProblem FormulationProblem Formulation
Anna YershovaAnna Yershova Thesis Defense
Given: a d-dimensional manifold, T, and a set of data points in T
Goal: preprocess these points so that, for any query point q in
T, the nearest data point to q can be found quickly
Manifolds of interest:
Technical ApproachTechnical Approach Nearest Neighbor Search
• Euclidean space, [0,1]d
• Hyperspheres, Sd
• Projective space, R P3
• Cartesian products of the above
Hypercube embedded in R d with Euclidean metricHypercube embedded in R d with Euclidean metric

Problem FormulationProblem FormulationProblem FormulationProblem Formulation
Anna YershovaAnna Yershova Thesis Defense
Given: a d-dimensional manifold, T, and a set of data points in T
Goal: preprocess these points so that, for any query point q in
T, the nearest data point to q can be found quickly
Manifolds of interest:
Technical ApproachTechnical Approach Nearest Neighbor Search
• Euclidean space, [0,1]d
• Hyperspheres, Sd
• Projective space, R P3
• Cartesian products of the above
d-sphere embedded in R d+1 with induced metricd-sphere embedded in R d+1 with induced metric
Problem FormulationProblem FormulationProblem FormulationProblem Formulation
Anna YershovaAnna Yershova Thesis Defense
Given: a d-dimensional manifold, T, and a set of data points in T
Goal: preprocess these points so that, for any query point q in
T, the nearest data point to q can be found quickly
Manifolds of interest:
Technical ApproachTechnical Approach Nearest Neighbor Search
• Euclidean space, [0,1]d
• Hyperspheres, Sd
• Projective space, R P3
• Cartesian products of the above
, metric compatible with Haar measure
, metric compatible with Haar measure
Problem FormulationProblem FormulationProblem FormulationProblem Formulation
Anna YershovaAnna Yershova Thesis Defense
Given: a d-dimensional manifold, T, and a set of data points in T
Goal: preprocess these points so that, for any query point q in
T, the nearest data point to q can be found quickly
Manifolds of interest:
Technical ApproachTechnical Approach Nearest Neighbor Search
• Euclidean space, [0,1]d
• Hyperspheres, Sd
• Projective space, R P3
• Cartesian products of the aboveweighed metricweighed metric
Technical ApproachTechnical Approach Nearest Neighbor Search
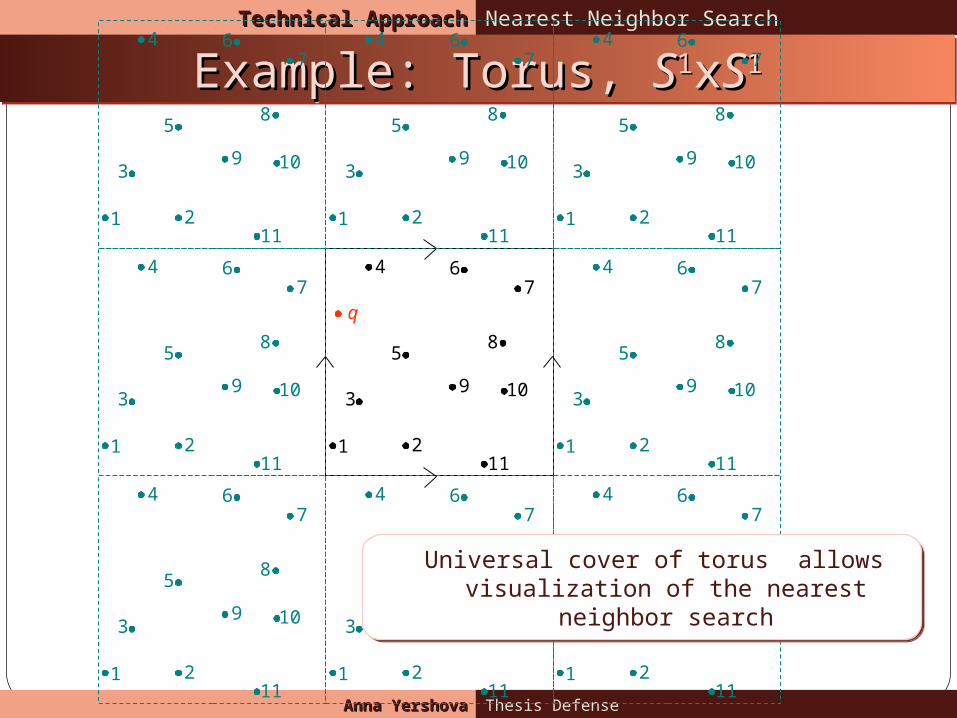
Example: Torus, Example: Torus, SS11xxSS11Example: Torus, Example: Torus, SS11xxSS11
Anna YershovaAnna Yershova Thesis Defense
47
6
5
1
3
2
9
8
10
11
q
47
6
5
1
3
2
9
8
10
11
47
6
5
1
3
2
9
8
10
11
47
6
5
1
3
2
9
8
10
11
47
6
5
1
3
2
9
8
10
11
47
6
5
1
3
2
9
8
10
11
47
6
5
1
3
2
9
8
10
11
47
6
5
1
3
2
9
8
10
11
47
6
5
1
3
2
9
8
10
11
Universal cover of torus allows visualization of the nearest neighbor
search
Universal cover of torus allows visualization of the nearest neighbor
search
Literature reviewLiterature reviewLiterature reviewLiterature review
Anna YershovaAnna Yershova Thesis Defense
Euclidean spaces:
[Friedman, 77] [Sproull, 91] [Arya, 93] [Agarwal, 02] [indyk, 04]
The most successful method used in practice is based on kd-trees [Arya 93]
General metric spaces:
Consider metric as a “black box” [Clarkson, 03,05] [Beygelzimer, 04]
[Krauthgamer, 04] [Hjaltason, 03]
The spaces we consider are manifolds, i.e. locally Euclidean, with
identifications on the boundary.
This allows extension of kd-trees.
Technical ApproachTechnical Approach Nearest Neighbor Search
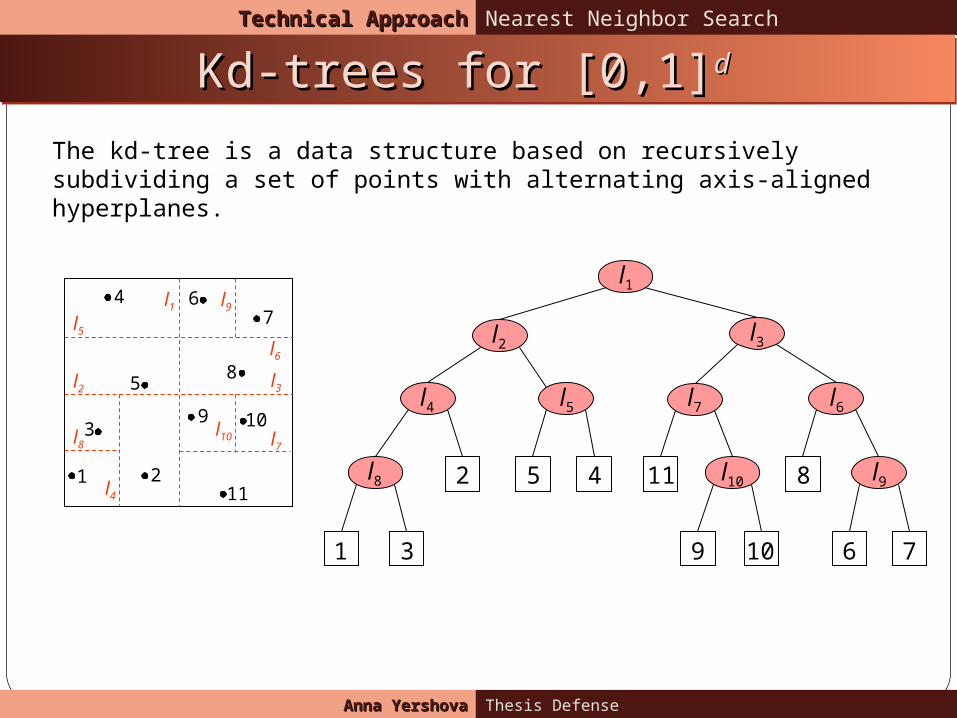
The kd-tree is a data structure based on recursively subdividing a set of points with alternating axis-aligned hyperplanes.
47
6
5
1
3
2
9
8
10
11
l5
l1 l9
l6
l3
l10 l7
l4
l8
l2
l1
l8
1
l2l3
l4 l5 l7 l6
l9l10
3
2 5 4 11
9 10
8
6 7
Technical ApproachTechnical Approach Nearest Neighbor Search
Kd-trees for [0,1]Kd-trees for [0,1]dd Kd-trees for [0,1]Kd-trees for [0,1]dd
Anna YershovaAnna Yershova Thesis Defense
q
47
6
5
1
3
2
9
8
10
11
l5
l1 l9
l6
l3
l10 l7
l4
l8
l2
l1
l8
1
l2l3
l4 l5 l7 l6
l9l10
3
2 5 4 11
9 10
8
6 7
Technical ApproachTechnical Approach Nearest Neighbor Search
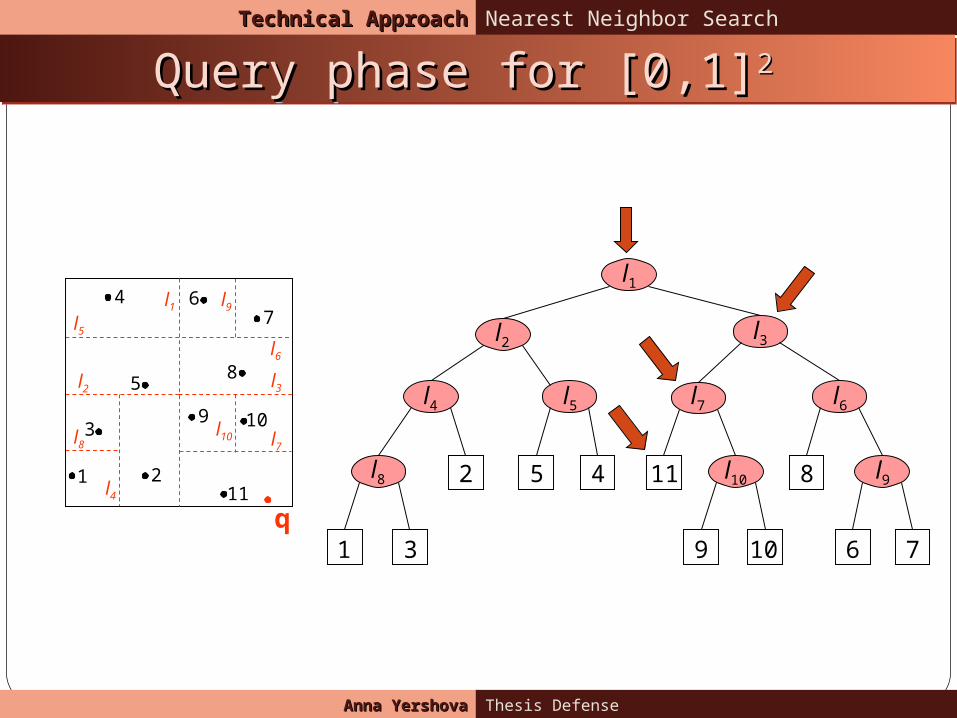
Query phase for [0,1]Query phase for [0,1]22 Query phase for [0,1]Query phase for [0,1]22
Anna YershovaAnna Yershova Thesis Defense

47
6
5
1
3
2
9
8
10
11
l5
l1 l9
l6
l3
l10 l7
l4
l8
l2
Technical ApproachTechnical Approach Nearest Neighbor Search
Kd-trees with modified metricKd-trees with modified metricKd-trees with modified metricKd-trees with modified metric
Anna YershovaAnna Yershova Thesis Defense
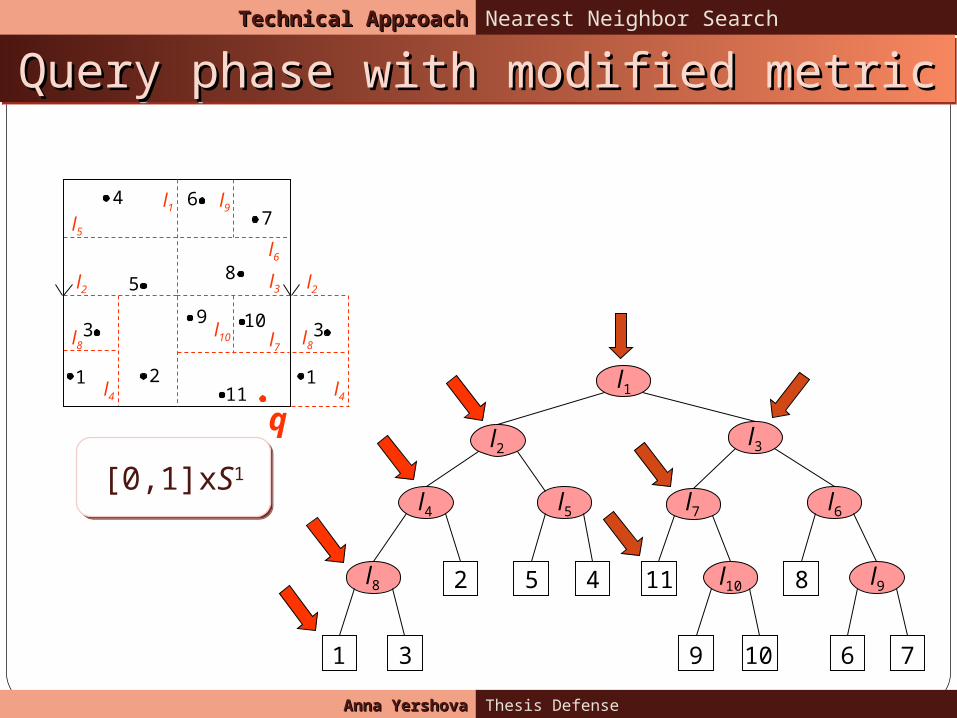
Main idea:
construction: unchanged procedure
query: modify metric between the query point and enclosing rectangles in the kd-tree
Main idea:
construction: unchanged procedure
query: modify metric between the query point and enclosing rectangles in the kd-tree
l1
l8
1
l2l3
l4 l5 l7 l6
l9l10
3
2 5 4 11
9 10
8
6 7
[0,1]xS1[0,1]xS1
q
47
6
5
1
3
2
9
8
10
11
l5
l1 l9
l6
l3
l10 l7
l4
l8
l2
1
3
l4
l8
l2
l1
l8
1
l2l3
l4 l5 l7 l6
l9l10
3
2 5 4 11
9 10
8
6 7
Technical ApproachTechnical Approach Nearest Neighbor Search
Query phase with modified metricQuery phase with modified metricQuery phase with modified metricQuery phase with modified metric
Anna YershovaAnna Yershova Thesis Defense
[0,1]xS1[0,1]xS1
Technical ApproachTechnical Approach Nearest Neighbor Search
Analysis of the algorithmAnalysis of the algorithmAnalysis of the algorithmAnalysis of the algorithm
Anna YershovaAnna Yershova Thesis Defense
Proposition 1. The algorithm correctly returns the nearest neighbor.
Proof idea: The points of kd-tree not visited by an algorithm will always be farther from the query point than some point already visited.
Proposition 2. For n points in dimension d, the construction time is O(dn lgn), the space is O(dn), and the query time is logarithmic in n, but exponential in d.
Proof idea: This follows directly from the well-known complexity of the basic kd-tree.
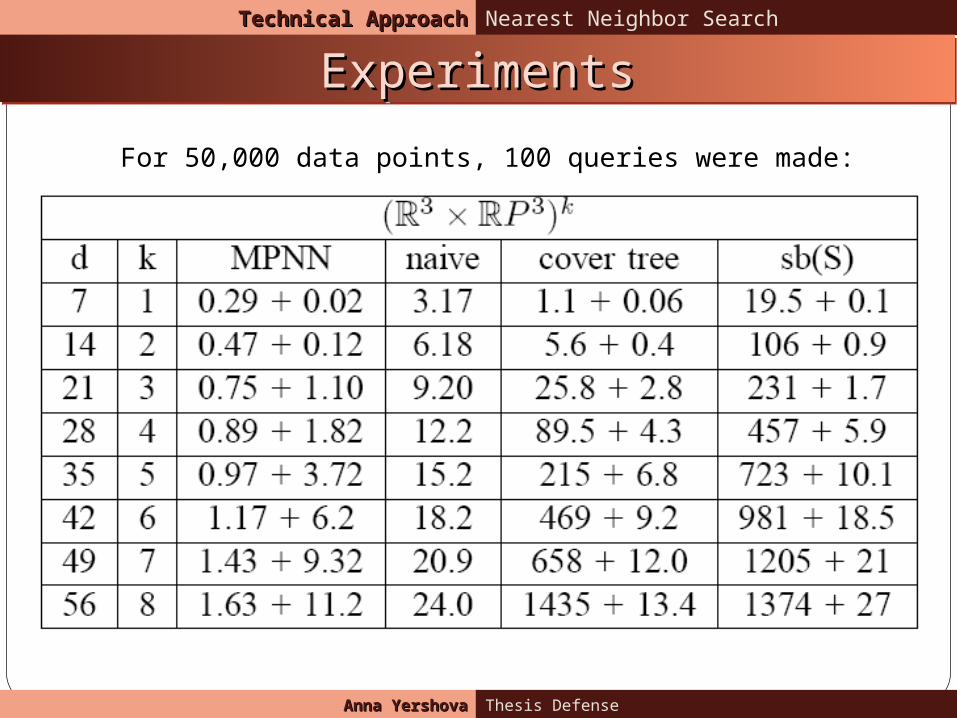
For 50,000 data points, 100 queries were made:
Technical ApproachTechnical Approach Nearest Neighbor Search
ExperimentsExperimentsExperimentsExperiments
Anna YershovaAnna Yershova Thesis Defense

Technical ApproachTechnical Approach Nearest Neighbor Search
Anna YershovaAnna Yershova Thesis Defense
ExperimentsExperimentsExperimentsExperiments

Technical ApproachTechnical Approach Nearest Neighbor Search
Anna YershovaAnna Yershova Thesis Defense
Publications: Improving Motion Planning Algorithms by Efficient Nearest Neighbor
Searching Anna Yershova and Steven M. LaValleIEEE Transactions on Robotics 23(1):151-157, February 2007
Publicly available library: http://msl.cs.uiuc.edu/~yershova/mpnn/mpnn.tar.gz
Also implemented in Move3D at LAAS, and KineoWorksTM
OutcomesOutcomesOutcomesOutcomes

Introduction Motion Planning ISS Framework Thesis Overview
Technical Contributions Nearest Neighbor Searching Uniform Deterministic Sampling Uniform Deterministic Sampling (partly in collaboration with Julie C.
Mitchell) Guided Sampling
Conclusions and Discussion
Presentation OverviewPresentation OverviewPresentation OverviewPresentation Overview
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
Technical ApproachTechnical Approach Uniform Deterministic Sampling
MotivationMotivationMotivationMotivation
Anna YershovaAnna Yershova Thesis Defense
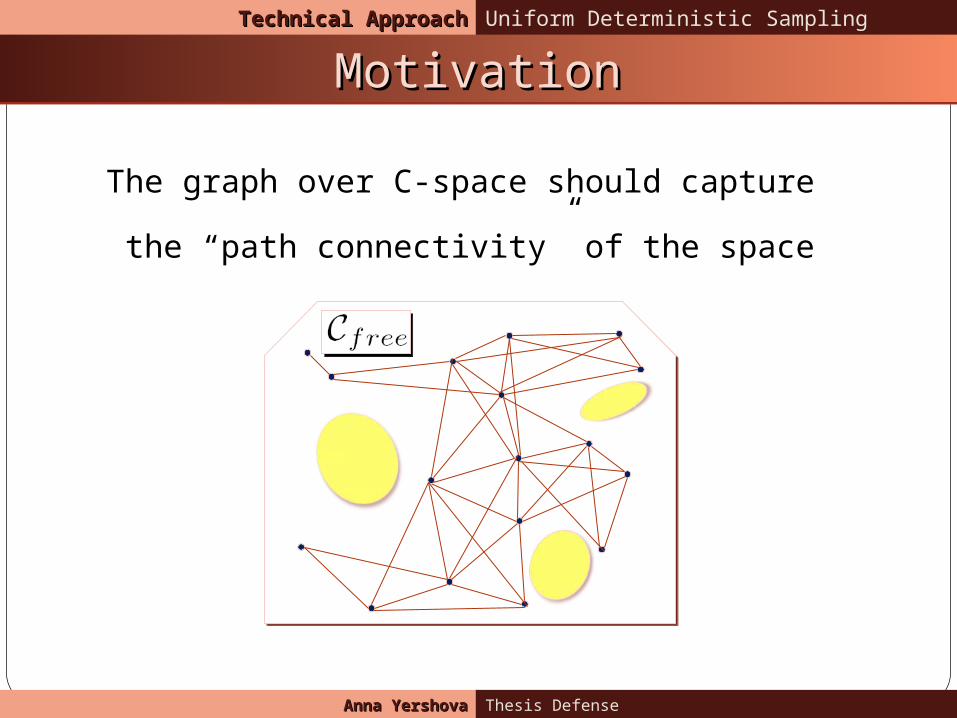
The graph over C-space should capture
the “path connectivity” of the space

Problem FormulationProblem FormulationProblem FormulationProblem Formulation
Anna YershovaAnna Yershova Thesis Defense
Desirable properties of samples
over the C-space:
Technical ApproachTechnical Approach Uniform Deterministic Sampling
• uniform
• deterministic
• incremental
• grid structure
• uniform
• deterministic
• incremental
• grid structure

Desirable properties of samples
over the C-space:
Problem FormulationProblem FormulationProblem FormulationProblem Formulation
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
• uniform
• deterministic
• incremental
• grid structure
• uniform
• deterministic
• incremental
• grid structure
Discrepancy:maximum volume estimation error
Dispersion: the radius of the largest empty balls

Problem FormulationProblem FormulationProblem FormulationProblem Formulation
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
• uniform
• deterministic
• incremental
• grid structure
• uniform
• deterministic
• incremental
• grid structure
The uniformity measures can be deterministically computed
Reason: resolution completeness
The uniformity measures can be deterministically computed
Reason: resolution completeness
Desirable properties of samples
over the C-space:
Problem FormulationProblem FormulationProblem FormulationProblem Formulation
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
• uniform
• deterministic
• incremental
• grid structure
• uniform
• deterministic
• incremental
• grid structure
The uniformity measures are optimized with every new point
Reason: it is unknown how many points are needed to solve the problem in advance
The uniformity measures are optimized with every new point
Reason: it is unknown how many points are needed to solve the problem in advance
Desirable properties of samples
over the C-space:
Problem FormulationProblem FormulationProblem FormulationProblem Formulation
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
• uniform
• deterministic
• incremental
• grid structure
• uniform
• deterministic
• incremental
• grid structureReason: Trivializes nearest neighbor computations
Reason: Trivializes nearest neighbor computations
Desirable properties of samples
over the C-space:
Desirable properties of samples
over the C-space:
Problem FormulationProblem FormulationProblem FormulationProblem Formulation
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
• uniform
• deterministic
• incremental
• grid structure
• uniform
• deterministic
• incremental
• grid structure
• Euclidean space, [0,1]d
• Spheres, Sd
• Projective space, R P3
• Cartesian products of the above
Literature overviewLiterature overviewLiterature overviewLiterature overview
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
• Euclidean space, [0,1]d
• Spheres, Sd
• Special orthogonal group, SO(3)
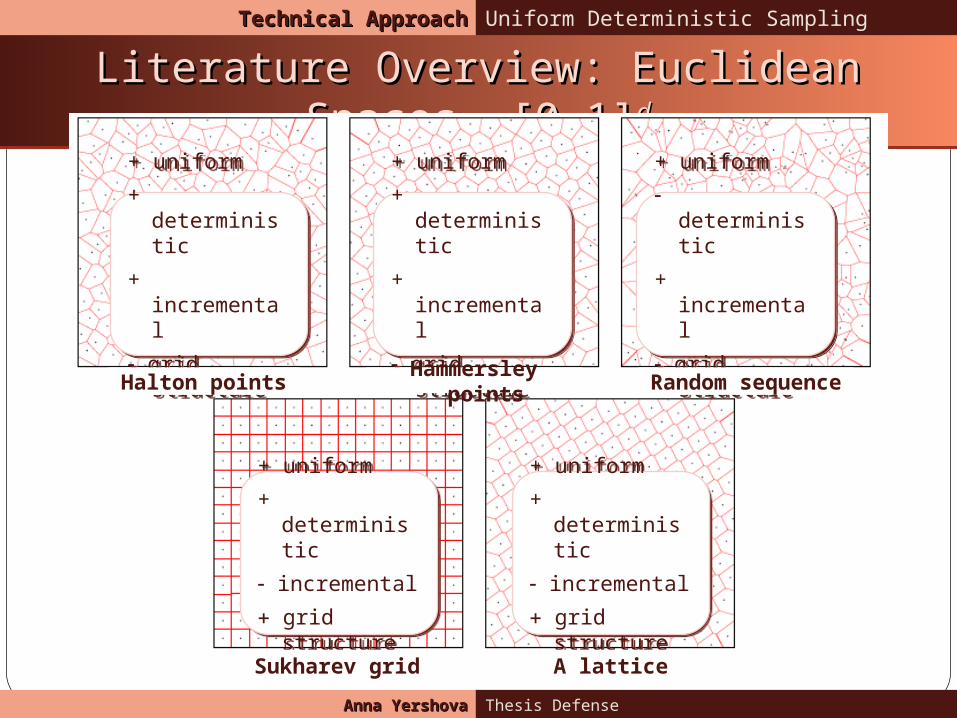
Literature Overview: Euclidean Spaces, Literature Overview: Euclidean Spaces, [0,1][0,1]dd
Literature Overview: Euclidean Spaces, Literature Overview: Euclidean Spaces, [0,1][0,1]dd
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
+ uniform
+ deterministic
+ incremental
grid structure
+ uniform
+ deterministic
+ incremental
grid structure
+ uniform
+ deterministic
+ incremental
grid structure
+ uniform
+ deterministic
+ incremental
grid structure
+ uniform
deterministic
+ incremental
grid structure
+ uniform
deterministic
+ incremental
grid structure
+ uniform
+ deterministic
incremental
grid structure
+ uniform
+ deterministic
incremental
grid structure
+ uniform
+ deterministic
incremental
grid structure
+ uniform
+ deterministic
incremental
grid structure
Halton pointsHammersley
pointsRandom sequence
Sukharev grid A lattice
Literature Overview: Euclidean Spaces, Literature Overview: Euclidean Spaces, [0,1][0,1]dd
Literature Overview: Euclidean Spaces, Literature Overview: Euclidean Spaces, [0,1][0,1]dd
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
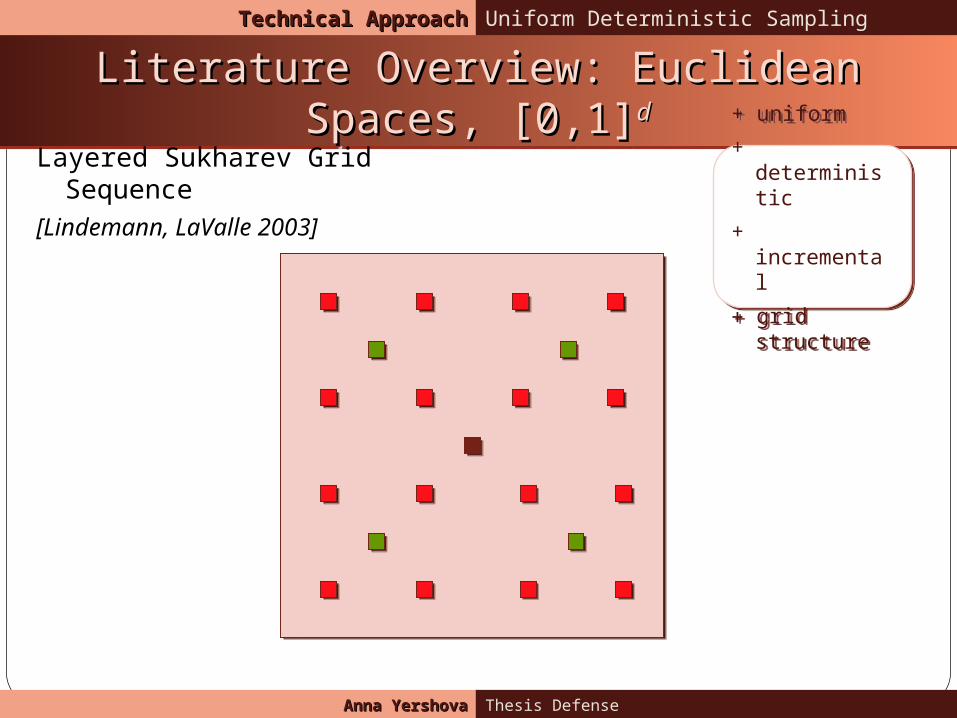
Layered Sukharev Grid Sequence[Lindemann, LaValle 2003]
+ uniform
+ deterministic
+ incremental
grid structure
+ uniform
+ deterministic
+ incremental
grid structure

Literature Overview: Spheres, Literature Overview: Spheres, SSdd, and SO(3), and SO(3)Literature Overview: Spheres, Literature Overview: Spheres, SSdd, and SO(3), and SO(3)
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
Random sequences subgroup method for random sequences SO(3) almost optimal discrepancy random sequences for spheres
[Beck, 84] [Diaconis, Shahshahani 87] [Wagner, 93] [Bourgain, Linderstrauss 93]
Deterministic point sets optimal discrepancy point sets for SO(3) uniform deterministic point sets for SO(3)
[Lubotzky, Phillips, Sarnak 86] [Mitchell 07]
No deterministic sequences to our knowledge
+ uniform
deterministic
+ incremental
grid structure
+ uniform
deterministic
+ incremental
grid structure
+ uniform
deterministic
incremental
grid structure
+ uniform
deterministic
incremental
grid structure
Our approach: SpheresOur approach: SpheresOur approach: SpheresOur approach: Spheres
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
+/ uniform
deterministic
+ incremental
grid structure
+/ uniform
deterministic
+ incremental
grid structure
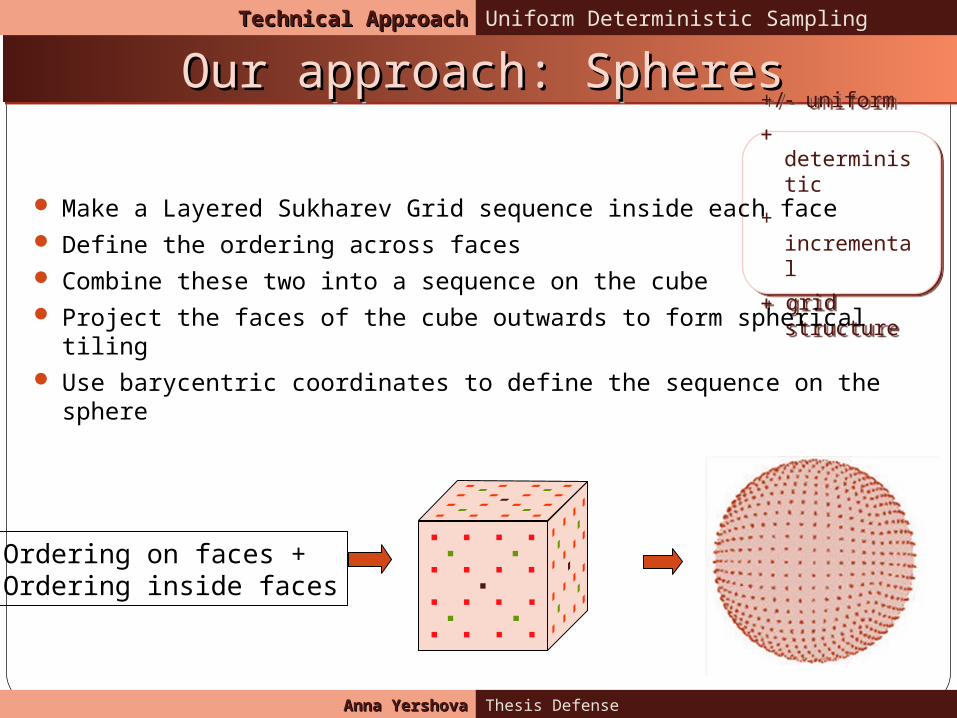
Ordering on faces +Ordering inside faces
Make a Layered Sukharev Grid sequence inside each face Define the ordering across faces Combine these two into a sequence on the cube Project the faces of the cube outwards to form spherical tiling Use barycentric coordinates to define the sequence on the sphere

Our approach: Cartesian ProductsOur approach: Cartesian ProductsOur approach: Cartesian ProductsOur approach: Cartesian Products
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
X Y
Make grid cells inside X and Y Naturally extend the grid structure to X Y Define the cell ordering and the ordering inside each cell
XY
X Y
Ordering on cells,Ordering inside cells
1234
Our approach: Our approach: SO(3)SO(3)Our approach: Our approach: SO(3)SO(3)
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
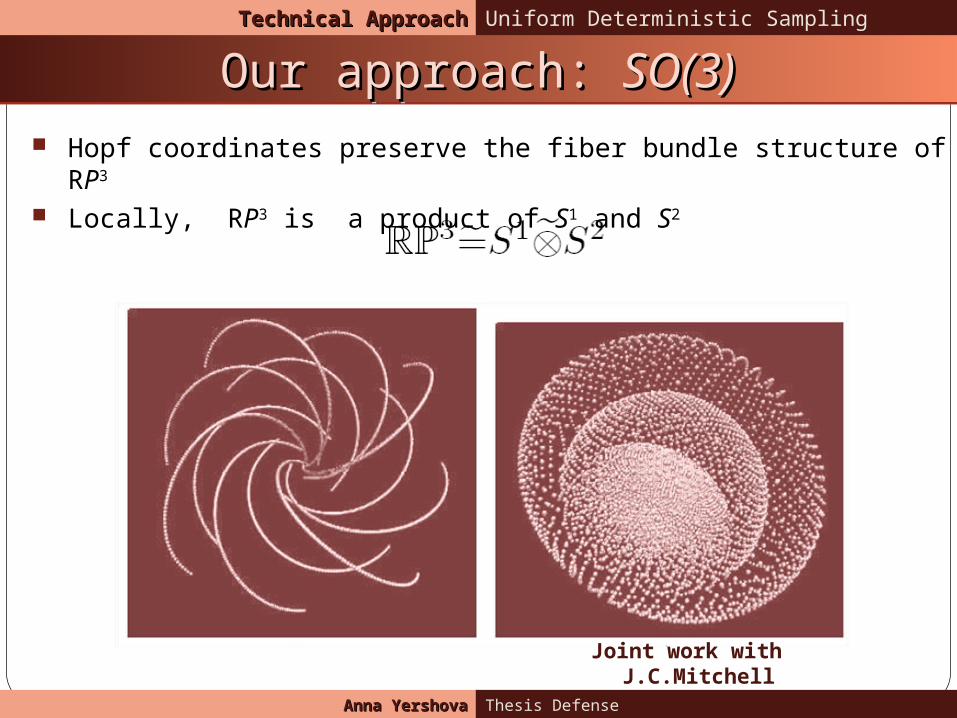
Hopf coordinates preserve the fiber bundle structure of RP3
Locally, RP3 is a product of S1 and S2
Joint work with J.C.Mitchell

Our approach:Our approach:SO(3)SO(3)Our approach:Our approach:SO(3)SO(3)
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
The method for Cartesian products can then be applied to R P3
Need two grids, for S1 and S2
Healpix, [Gorski,05]Healpix, [Gorski,05]
Grid on S2
Grid on S2
Grid on S1
Grid on S1

Our approach:Our approach:SO(3)SO(3)Our approach:Our approach:SO(3)SO(3)
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
The method for Cartesian products can then be applied to R P3
Need two grids, for S1 and S2
Grid on S2
Grid on S2
Grid on S1
Grid on S1
Our approach:Our approach:SO(3)SO(3)Our approach:Our approach:SO(3)SO(3)
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
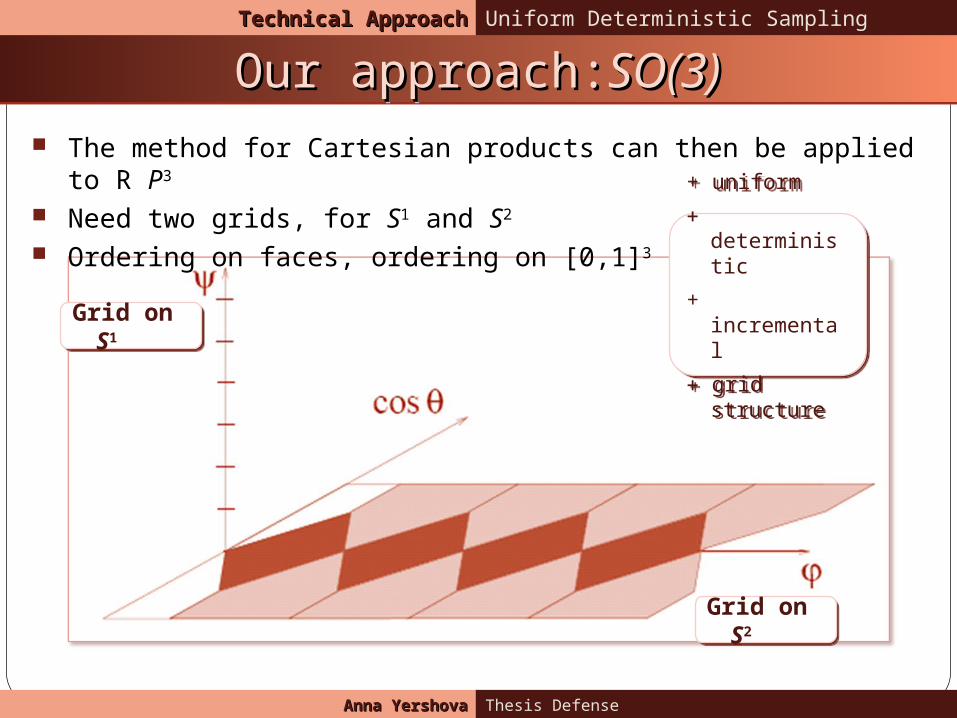
The method for Cartesian products can then be applied to R P3
Need two grids, for S1 and S2
Ordering on faces, ordering on [0,1]3
Grid on S2
Grid on S2
Grid on S1
Grid on S1
+ uniform
deterministic
+ incremental
grid structure
+ uniform
deterministic
+ incremental
grid structure

1. The dispersion of the sequence Ts at the resolution level l containing points is:
2. The relationship between the discrepancy of the sequence T at the resolution level l taken over d-dimensional spherical canonical rectangles and the discrepancy of the optimal sequence, To, is:
3. The sequence T has the following properties: The position of the i-th sample in the sequence T can be generated in
O(log i) time. For any i-th sample any of the 2d nearest grid neighbors from the same
layer can be found in O((log i)/d) time.
PropositionsPropositionsPropositionsPropositions
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
1. The dispersion of the sequence T at the resolution level l is:
in which is the dispersion of the sequence over S2.
PropositionsPropositionsPropositionsPropositions
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling

ExperimentsExperimentsExperimentsExperiments
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
Configuration spaces: SO(3) and SE(3) = R3 x SO(3)
(a)
(b)
ExperimentsExperimentsExperimentsExperiments
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
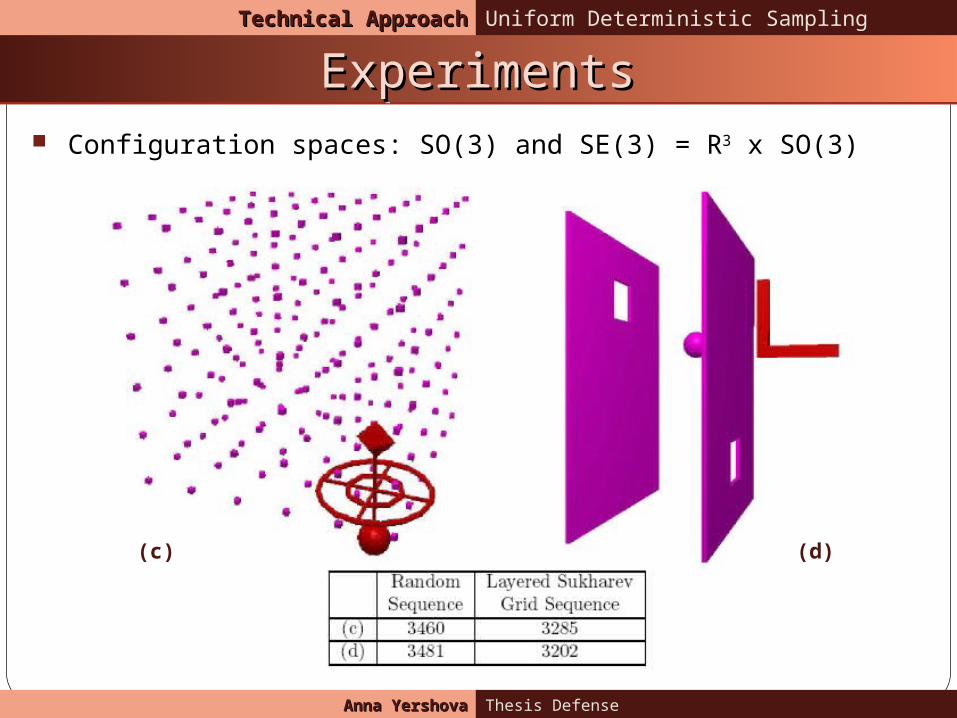
Configuration spaces: SO(3) and SE(3) = R3 x SO(3)
(c) (d)

OutcomesOutcomesOutcomesOutcomes
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Uniform Deterministic Sampling
Publications: Generating Uniform Incremental Grids on SO(3) Using the Hopf Fibration
Anna Yershova, Steven M. LaValle, and Julie C. MitchellSubmitted to the Eighth International Workshop on the Algorithmic Foundations of Robotics (WAFR 2008)
Deterministic sampling methods for spheres and SO(3) Anna Yershova and Steven M. LaValle,2004 IEEE International Conference on Robotics and Automation (ICRA 2004)
Incremental Grid Sampling Strategies in Robotics Stephen R. Lindemann, Anna Yershova, and Steven M. LaValle,Sixth International Workshop on the Algorithmic Foundations of Robotics(WAFR 2004)
Publicly available library: http://msl.cs.uiuc.edu/~yershova/sampling/sampling.tar.gz
Introduction Motion Planning ISS Framework Thesis Overview
Technical Contributions Nearest Neighbor Searching Uniform Deterministic Sampling Guided Sampling Guided Sampling (partly in collaboration with N. Simeon, L. Jaillet)
Conclusions and Discussion
Presentation OverviewPresentation OverviewPresentation OverviewPresentation Overview
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Guided Sampling
Rapidly-Exploring Random TreesRapidly-Exploring Random TreesRapidly-Exploring Random TreesRapidly-Exploring Random Trees
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Guided Sampling
[LaValle, Kuffner 99]
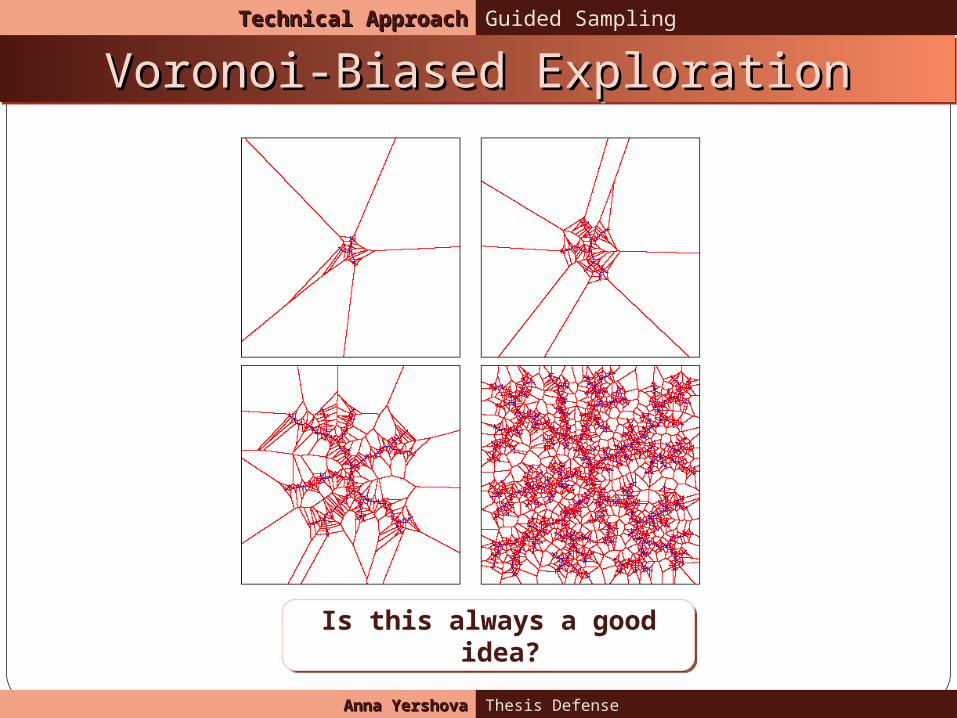
Voronoi-Biased ExplorationVoronoi-Biased ExplorationVoronoi-Biased ExplorationVoronoi-Biased Exploration
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Guided Sampling
Is this always a good idea?
Is this always a good idea?
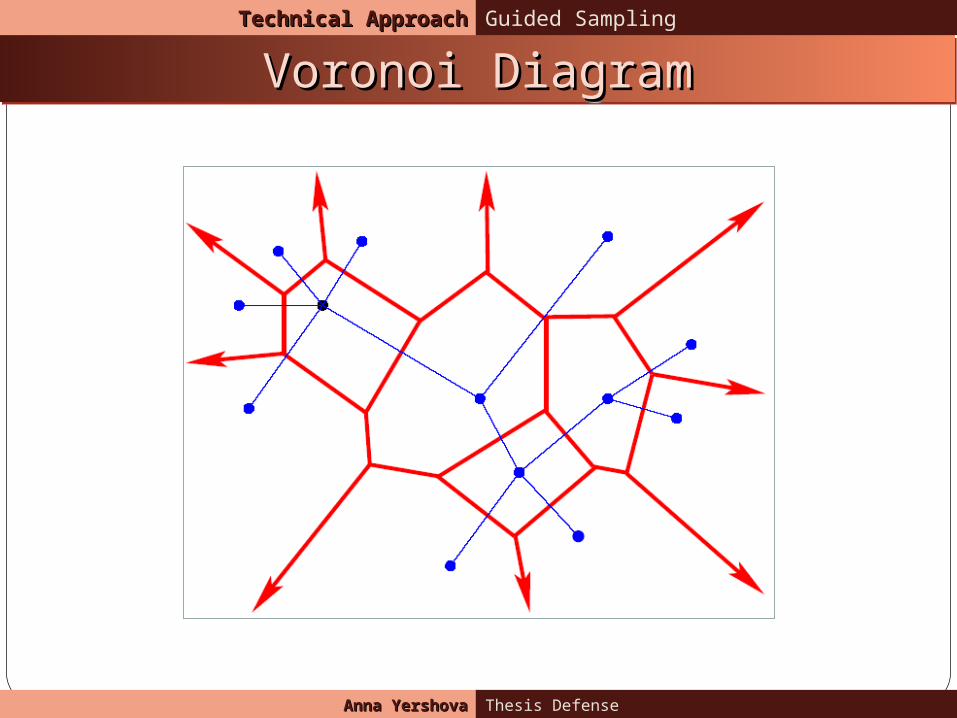
Voronoi DiagramVoronoi DiagramVoronoi DiagramVoronoi Diagram
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Guided Sampling

refinement expansion
Where will the random sample fall? How to control the behavior of RRT?
Refinement vs. ExpansionRefinement vs. ExpansionRefinement vs. ExpansionRefinement vs. Expansion
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Guided Sampling

Expansion dominates
Balanced refinement and expansion
The trade-off depends on the size of the bounding box
Determining the BoundaryDetermining the BoundaryDetermining the BoundaryDetermining the Boundary
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Guided Sampling
Refinement is good when multiresolution search is needed
Expansion is good when the tree can grow and will not be blocked by obstacles
Main motivation:
Voronoi bias does not take into account obstacles
How to incorporate the obstacles into Voronoi bias?
Controlling the Voronoi BiasControlling the Voronoi BiasControlling the Voronoi BiasControlling the Voronoi Bias
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Guided Sampling
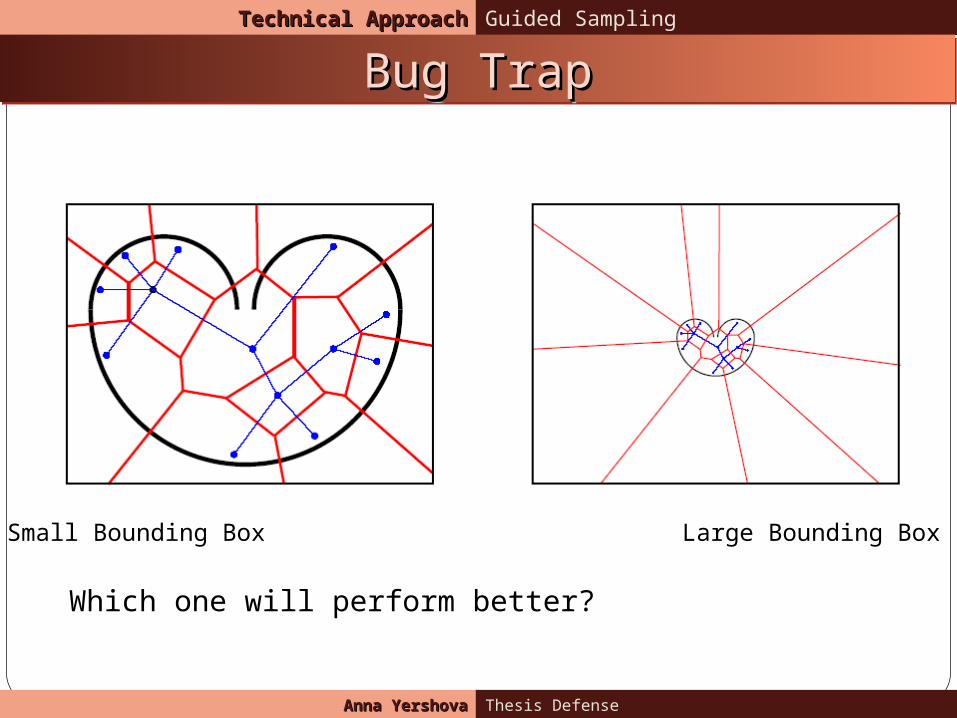
Which one will perform better?
Small Bounding Box Large Bounding Box
Technical ApproachTechnical Approach Guided Sampling
Bug TrapBug TrapBug TrapBug Trap
Anna YershovaAnna Yershova Thesis Defense

Technical ApproachTechnical Approach Guided Sampling
Voronoi Bias for the Original RRTVoronoi Bias for the Original RRTVoronoi Bias for the Original RRTVoronoi Bias for the Original RRT
Anna YershovaAnna Yershova Thesis Defense
Instead of fixed sampling domain use Dynamic Domain for sampling
Technical ApproachTechnical Approach Guided Sampling
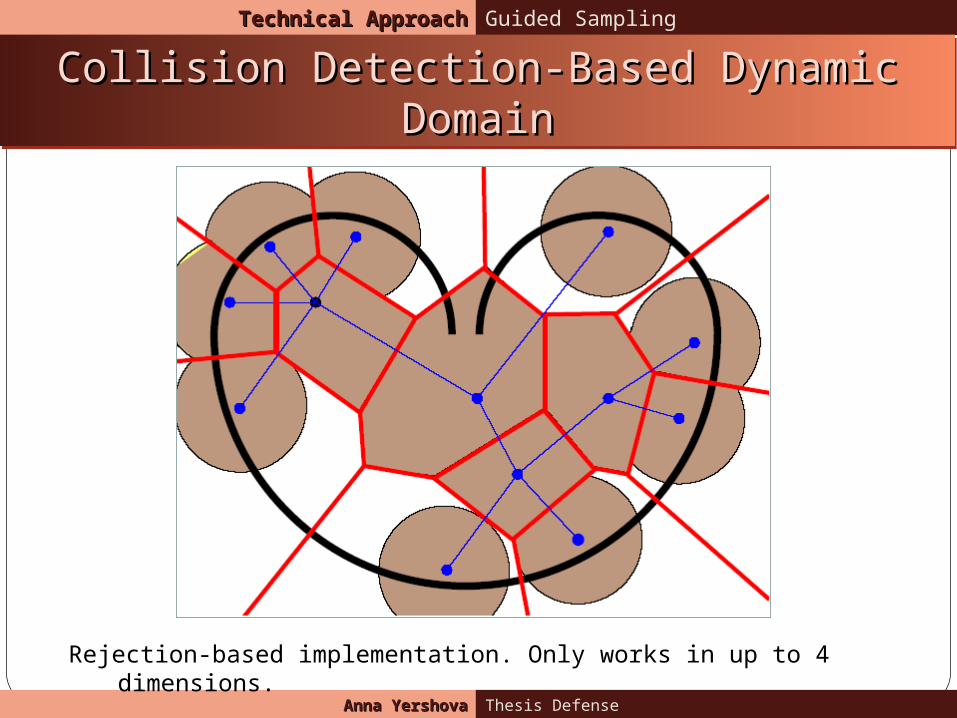
Collision Detection-Based Dynamic DomainCollision Detection-Based Dynamic DomainCollision Detection-Based Dynamic DomainCollision Detection-Based Dynamic Domain
Anna YershovaAnna Yershova Thesis Defense
Rejection-based implementation. Only works in up to 4 dimensions.

Technical ApproachTechnical Approach Guided Sampling
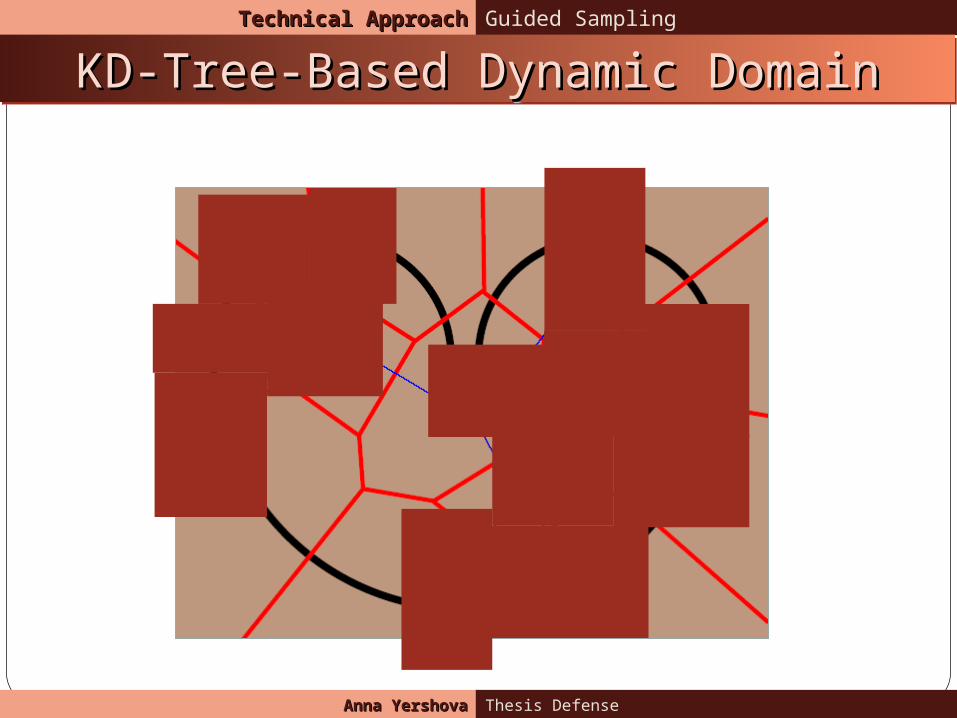
KD-Tree-Based Dynamic DomainKD-Tree-Based Dynamic DomainKD-Tree-Based Dynamic DomainKD-Tree-Based Dynamic Domain
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Guided Sampling
KD-Tree-Based Dynamic DomainKD-Tree-Based Dynamic DomainKD-Tree-Based Dynamic DomainKD-Tree-Based Dynamic Domain
Anna YershovaAnna Yershova Thesis Defense
Technical ApproachTechnical Approach Guided Sampling
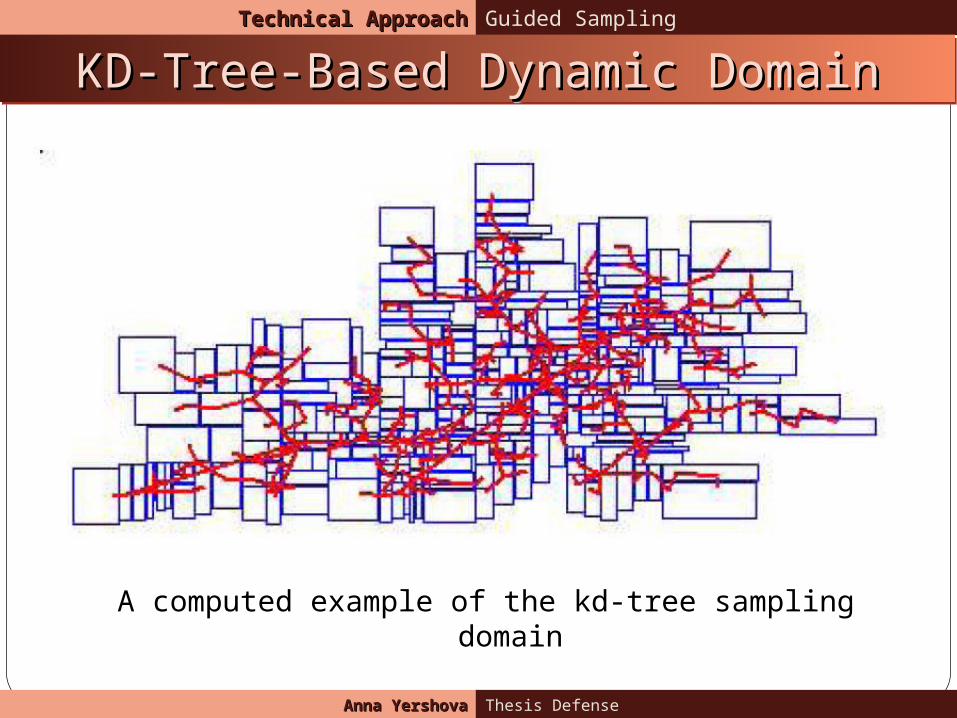
KD-Tree-Based Dynamic DomainKD-Tree-Based Dynamic DomainKD-Tree-Based Dynamic DomainKD-Tree-Based Dynamic Domain
Anna YershovaAnna Yershova Thesis Defense
A computed example of the kd-tree sampling domain
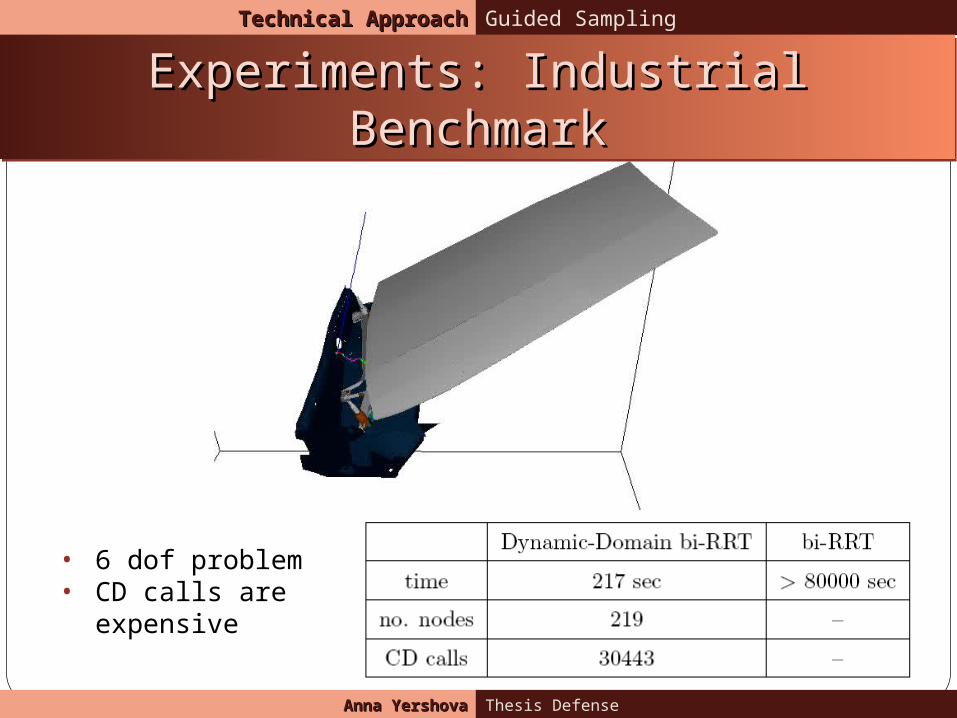
Wiper Motor (courtesy of KINEO)
• 6 dof problem• CD calls are
expensive
Technical ApproachTechnical Approach Guided Sampling
Experiments: Industrial BenchmarkExperiments: Industrial BenchmarkExperiments: Industrial BenchmarkExperiments: Industrial Benchmark
Anna YershovaAnna Yershova Thesis Defense

Molecule
• 68 dof problem was solved in 2 minutes, never solved before
• 330 dof in 1 hour, never solved before• 6 dof in 1 min, has 30 times improvement compared to
RRT• CD calls are expensive
Technical ApproachTechnical Approach Guided Sampling
Experiments: Protein DockingExperiments: Protein DockingExperiments: Protein DockingExperiments: Protein Docking
Anna YershovaAnna Yershova Thesis Defense
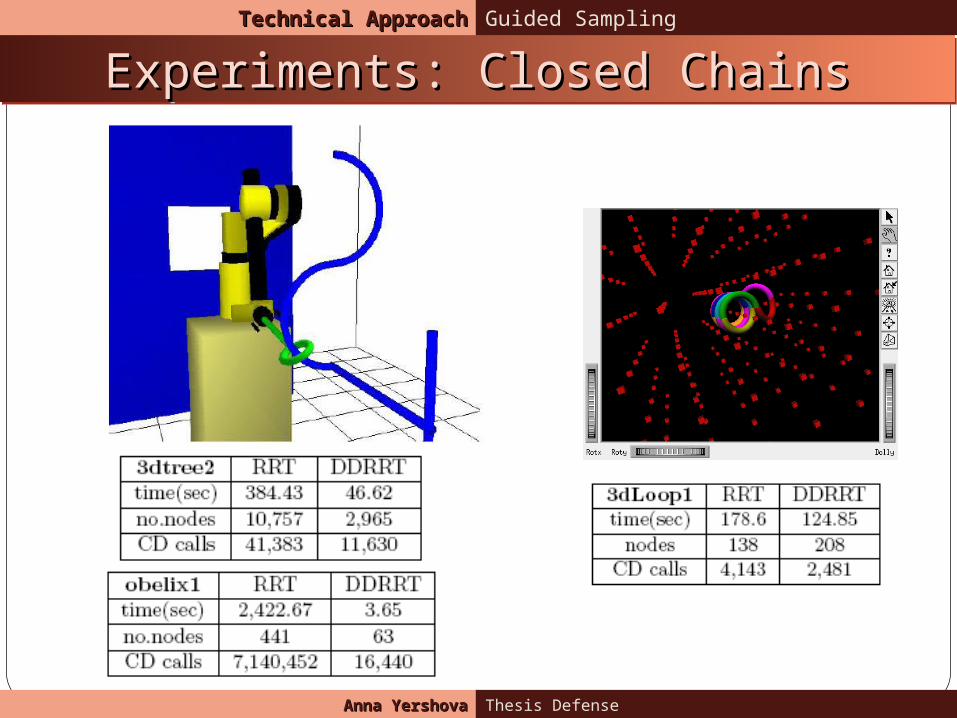
Experiments: Closed ChainsExperiments: Closed ChainsExperiments: Closed ChainsExperiments: Closed ChainsTechnical ApproachTechnical Approach Guided Sampling
Anna YershovaAnna Yershova Thesis Defense
Uniform sampling on hyperspheres
Sampling on C-spaces arising from closed chains
Sampling in the space of trajectories for control systems: motion primitives
ConclusionsConclusions
Anna YershovaAnna Yershova Thesis Defense
ConclusionsConclusionsConclusionsConclusions
Thank you!
Thank you!