an engineer’s guide to matlab 3rd edition chapter 7 3d graphics
DESCRIPTION
AN ENGINEER’S GUIDE TO MATLAB 3rd Edition CHAPTER 7 3D GRAPHICS. Chapter 7 – Objective Present the implementation of a wide selection of three-dimensional plotting capabilities. Topics. Lines in 3D Surfaces. Lines in 3D - The 3D version of plot is - PowerPoint PPT PresentationTRANSCRIPT
Copyright © Edward B. Magrab 2009
Chapter 7
1
An Engineer’s Guide to MATLAB
AN ENGINEER’S GUIDE TO MATLAB
3rd Edition
CHAPTER 7
3D GRAPHICS

Copyright © Edward B. Magrab 2009
Chapter 7
2
An Engineer’s Guide to MATLAB
Chapter 7 – Objective
• Present the implementation of a wide selection of three-dimensional plotting capabilities.

Copyright © Edward B. Magrab 2009
Chapter 7
3
An Engineer’s Guide to MATLAB
Topics
Lines in 3D
Surfaces

Copyright © Edward B. Magrab 2009
Chapter 7
4
An Engineer’s Guide to MATLAB
Lines in 3D -
The 3D version of plot is
plot3(u1, v1, w1, c1, u2, v2, w2, c2,…)
where
uj, vj, and wj are the x, y, and z coordinates, respectively, of a point.
They are scalars, vectors of the same length, matrices of the same order, or expressions that, when evaluated, result in one of these three quantities.
cj is a string of characters -
One character specifies the color.
One character specifies the point characteristics.
One or two characters specify the line type.

Copyright © Edward B. Magrab 2009
Chapter 7
5
An Engineer’s Guide to MATLAB
To draw a set of n unconnected lines whose end points are
(x1j,y1j,z1j) and (x2j,y2j,z2j), j = 1, 2, …, n
we create six vectors
1 2
1 2
2
1 2
1
j j j jn
j j j jn
j j1 j jn
x = x x … x
y = y y … y j = ,
z = z z … z
Then, plot3 is
x1 = […]; x2 = […];y1 = […]; y2 = […];z1 = […]; z2 = […]; plot3([x1; x2], [y1; y2], [z1; z2])
where [x1; x2], [y1; y2], and [z1; z2] are each (2n) matrices.

Copyright © Edward B. Magrab 2009
Chapter 7
6
An Engineer’s Guide to MATLAB
All annotation procedures discussed for 2D drawings are applicable to the 3D curve- and surface-generating functions, except that the arguments of text become
text(x, y, z, s)
where s is a string and
zlabel
is used to label the z-axis.

Copyright © Edward B. Magrab 2009
Chapter 7
7
An Engineer’s Guide to MATLAB
Example – Drawing Wire Frame Boxes
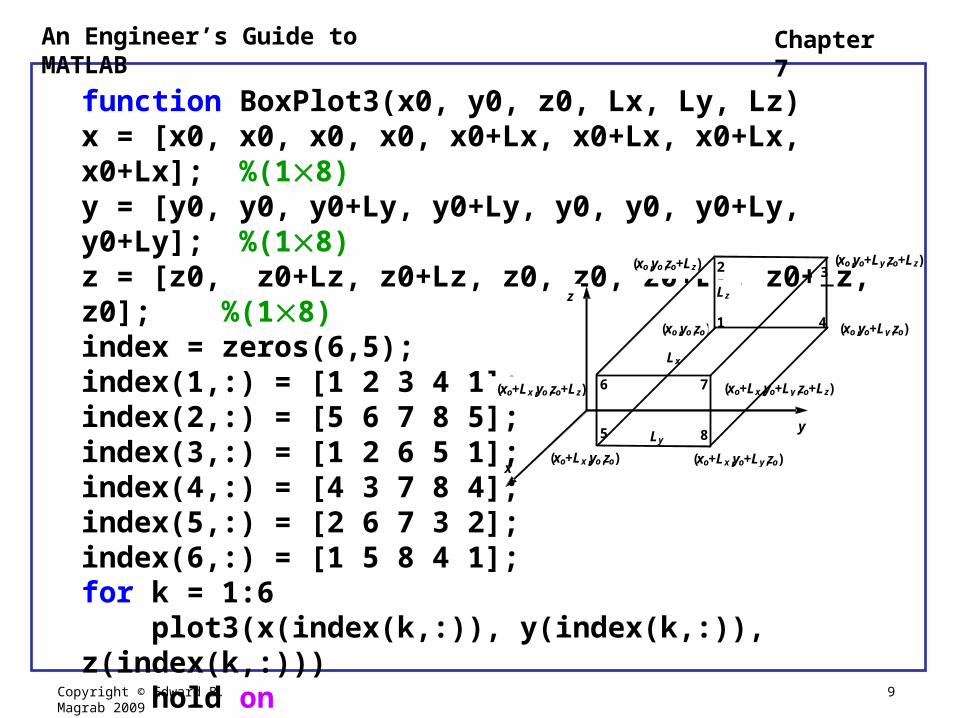
We shall create a function called BoxPlot3 to draw the four edges of each of the six surfaces of a box and then use the function to draw several boxes.
(xo,yo,zo)
(xo,yo,zo+Lz)
(xo+Lx,yo,zo)
(xo+Lx,yo,zo+Lz)
(xo+Lx,yo+Ly,zo)
Ly
Lx
Lz
5
6 7
8
1
2 3
4 (xo,yo+Ly,zo)
(xo,yo+Ly,zo+Lz)
(xo+Lx,yo+Ly,zo+Lz)
x
y
z

Copyright © Edward B. Magrab 2009
Chapter 7
8
An Engineer’s Guide to MATLAB
The location and orientation of the box are determined by the coordinates of its two diagonally opposed corners: P(xo,yo,zo) and P(xo+Lx, yo+Ly, zo+Lz).
The script is
Copyright © Edward B. Magrab 2009
Chapter 7
9
An Engineer’s Guide to MATLAB
function BoxPlot3(x0, y0, z0, Lx, Ly, Lz)x = [x0, x0, x0, x0, x0+Lx, x0+Lx, x0+Lx, x0+Lx]; %(18)y = [y0, y0, y0+Ly, y0+Ly, y0, y0, y0+Ly, y0+Ly]; %(18)z = [z0, z0+Lz, z0+Lz, z0, z0, z0+Lz, z0+Lz, z0]; %(18)index = zeros(6,5);index(1,:) = [1 2 3 4 1];index(2,:) = [5 6 7 8 5];index(3,:) = [1 2 6 5 1];index(4,:) = [4 3 7 8 4];index(5,:) = [2 6 7 3 2];index(6,:) = [1 5 8 4 1];for k = 1:6 plot3(x(index(k,:)), y(index(k,:)), z(index(k,:))) hold onend
(xo,yo,zo)
(xo,yo,zo+Lz)
(xo+Lx,yo,zo)
(xo+Lx,yo,zo+Lz)
(xo+Lx,yo+Ly,zo)
Ly
Lx
Lz
5
6 7
8
1
2 3
4
z
y
(xo,yo+Ly,zo)
(xo,yo+Ly,zo+Lz)
(xo+Lx,yo+Ly,zo+Lz)
x
y
z
Copyright © Edward B. Magrab 2009
Chapter 7
10
An Engineer’s Guide to MATLAB
We now use BoxPLot3 to generate three boxes with the following dimensions and the coordinates (xo, yo, zo).
Box #1
Size: 357Location: (1, 1, 1)
Box #2
Size: 451Location: (3, 4, 5)
Box #3
Size: 111Location: (4.5, 5.5, 6)

Copyright © Edward B. Magrab 2009
Chapter 7
11
An Engineer’s Guide to MATLAB
The script to create and display these wire frame boxes is
BoxPlot3(1, 1, 1, 3, 5, 7)BoxPlot3(4, 6, 8, 4, 5, 1)BoxPlot3(8, 11, 9, 1, 1, 1)
function BoxPlot3(x0, y0, z0, Lx, Ly, Lz)
Box #1 Size: 357 Location: (1,1,1)
Box #2 Size: 451 Location: (3,4,5)
Box #3 Size: 111 Location: (4.5,5.5,6)

Copyright © Edward B. Magrab 2009
Chapter 7
12
An Engineer’s Guide to MATLAB
Example – Sine Wave Drawn on the Surface of a Cylinder
The coordinates of a sine wave on the surface of a cylinder are obtained from the following relations.
cos( )
sin( )
cos( )
x = b t
y = b t
z = c at
If we assume that a = 10.0, b = 1.0, c = 0.3, and 0 t 2, then the script is

Copyright © Edward B. Magrab 2009
Chapter 7
13
An Engineer’s Guide to MATLAB
t = linspace(0, 2*pi, 200); a = 10; b = 1.0; c = 0.3;x = b*cos(t);y = b*sin(t);z = c*cos(a*t);plot3(x, y, z, 'k')axis equal
cos( )
sin( )
cos( )
x = b t
y = b t
z = c at

Copyright © Edward B. Magrab 2009
Chapter 7
14
An Engineer’s Guide to MATLAB
Surfaces
A set of 3D plotting functions is available to create surfaces, contours, and variations and specialization of these basic forms.
A surface is defined by the expression
( )z = f x, y
where x and y are the coordinates in the xy-plane and z is the resulting height.

Copyright © Edward B. Magrab 2009
Chapter 7
15
An Engineer’s Guide to MATLAB
The basic surface plotting functions are
surf(x, y, z)
and
mesh(x, y, z)
where the x, y, and z are the coordinates of the points on the surface.
surf – draws a surface composed of colored patches.
The colors of the patches are determined by the magnitude of z.
mesh – draws white surface patches that are defined bytheir boundary.
The colors of the lines are determined by the magnitude of z.
Copyright © Edward B. Magrab 2009
Chapter 7
16
An Engineer’s Guide to MATLAB
Example –
Consider the surface created by
4 2 2 2( ) = + 3 + - 2 - 2 - 2 + 6z x, y x x y x y x y
over the range 3 < x < 3 and 3 < y < 13.
We shall place the generation of the x, y, and z coordinate values in an M file so that we can use it in several examples.
We call this function SurfExample.

Copyright © Edward B. Magrab 2009
Chapter 7
17
An Engineer’s Guide to MATLAB
function [x, y, z] = SurfExamplex1 = linspace(-3, 3, 15); % (115)y1 = linspace(-3, 13, 17); % (117)[x, y] = meshgrid(x1, y1); % (1715)z = x.^4+3*x.^22*x+6-2*y.*x.^2+y.^2-2*y; % (1715)
4 2 2 2( ) = + 3 + - 2 - 2 - 2 + 6z x, y x x y x y x y

Copyright © Edward B. Magrab 2009
Chapter 7
18
An Engineer’s Guide to MATLAB
Difference Between surf and mesh
[x,y,z] = SurfExample;surf(x, y, z)
[x,y,z] = SurfExample;mesh(x, y, z)
-4-2
02
4
-5
0
5
10
150
50
100
150
200

Copyright © Edward B. Magrab 2009
Chapter 7
19
An Engineer’s Guide to MATLAB
[x,y,z] = SurfExample;mesh(x, y, z) hidden off

Copyright © Edward B. Magrab 2009
Chapter 7
20
An Engineer’s Guide to MATLAB
Combining Surfaces and Lines
One can combine 3D plotting functions to draw multiple surfaces and multiple lines.
To illustrate this, we create two functions –
Corners
Draws four lines connecting the corners of the surface generated by SurfExample to the xy-plane passing through z = 0.
Disc
Creates a circular disc that intersects the surface created by SurfExample at zo = 80, has a radius of 10 units, and has its center at (0,5).

Copyright © Edward B. Magrab 2009
Chapter 7
21
An Engineer’s Guide to MATLAB
The two functions are
function Cornersxc = [-3, -3, 3, 3];yc = [-3, 13, 13, -3];zc = xc.^4+3*xc.^22*xc+62*yc.*xc.^2+yc.^22*yc;hold onplot3([xc; xc], [yc; yc], [zeros(1,4); zc], 'k')
-3-2
-10
12
3
-5
0
5
10
150
50
100
150
200
(3, 3, z(3,3))
(3, 13, z(3,13))
(3, 13, z(3,13))(3, 3, z(3,3))The coordinates of the corners are:

Copyright © Edward B. Magrab 2009
Chapter 7
22
An Engineer’s Guide to MATLAB
function Disc(R, zo)r = linspace(0, R, 12); % (112)theta = linspace(0, 2*pi, 50); % (150)x = cos(theta')*r; % (5012)y = 5 + sin(theta')*r; % (5012)hold onz = repmat(zo, size(x)); % (5012)surf(x, y, z)
-10
-5
0
5
10
-5
0
5
10
15
79
79.5
80
80.5
81

Copyright © Edward B. Magrab 2009
Chapter 7
23
An Engineer’s Guide to MATLAB
The script is
[x, y, z] = SurfExample;surf(x, y, z);Disc(10, 80)Corners
-10-5
05
10
-50
510
150
50
100
150
200

Copyright © Edward B. Magrab 2009
Chapter 7
24
An Engineer’s Guide to MATLAB
Altering Graph Appearance
Several functions that can be used in various combinations to alter the appearance of the resulting surface plot are -
box on or box offgrid on or grid offaxis on or axis off
The function box on only draws a box if axis on has been selected.

Copyright © Edward B. Magrab 2009
Chapter 7
25
An Engineer’s Guide to MATLAB
Illustration of box, grid, and axis
[x,y,z] = SurfExamplemesh(x, y, z)grid off
[x,y,z] = SurfExamplemesh(x, y, z)axis off grid off
-10-5
05
10
-50
510
150
50
100
150
200

Copyright © Edward B. Magrab 2009
Chapter 7
26
An Engineer’s Guide to MATLAB
[x,y,z] = SurfExamplemesh(x, y, z)axis on grid offbox on
-10-5
05
10
-50
510
150
50
100
150
200

Copyright © Edward B. Magrab 2009
Chapter 7
27
An Engineer’s Guide to MATLAB
The colors of either the patches created by surf or the lines created by mesh can be changed to a uniform color using
colormap(c)
where c is a three-element vector, each of whose value varies between 0 and 1.
The first element corresponds to the intensity of red, the second to the intensity of green, and the third to the intensity of blue.

Copyright © Edward B. Magrab 2009
Chapter 7
28
An Engineer’s Guide to MATLAB
Some Values of the Color Vector Used in colormap(c)
c Color
[0 0 0] [1 1 1] [1 0 0] [0 1 0] [0 0 1] [1 1 0] [1 0 1] [0 1 1] [0.5 0.5 0.5]
black white red green blue yellow magenta cyan gray

Copyright © Edward B. Magrab 2009
Chapter 7
29
An Engineer’s Guide to MATLAB
Additional Ways to Visually Enhance a Surface
[x,y,z] = SurfExample;meshz(x, y, z)
[x,y,z] = SurfExample;waterfall(x, y, z)
-3-2
-10
12
3
-5
0
5
10
150
50
100
150
200
-3-2
-10
12
3
-5
0
5
10
150
50
100
150
200

Copyright © Edward B. Magrab 2009
Chapter 7
30
An Engineer’s Guide to MATLAB
02
46
810
1214
16
-5
0
5
10
150
50
100
150
200
[x,y,z] = SurfExample;ribbon(y, z)
[x,y,z] = SurfExample;surfnorm(x, y, z)
-4-3
-2-1
01
23
4
-5
0
5
10
150
50
100
150
200

Copyright © Edward B. Magrab 2009
Chapter 7
31
An Engineer’s Guide to MATLAB
Contour Plots
Surfaces can also be transformed into contour plots, which are plots of the curves formed by the intersection of the surface and a plane parallel to the xy-plane at given values of z.
The functions
surfc(x, y, z)meshc(x, y, z)
create surfaces with contours projected beneath the surface.
The quantities x, y, and z are the values of the coordinates of points that define the surface.

Copyright © Edward B. Magrab 2009
Chapter 7
32
An Engineer’s Guide to MATLAB
Illustration of meshc and surfc
[x,y,z] = SurfExample;meshc(x, y, z)grid off
[x,y,z] = SurfExample;surfc(x, y, z)grid off
-3-2
-10
12
3
-5
0
5
10
150
50
100
150
200
-3-2
-10
12
3
-5
0
5
10
150
50
100
150
200

Copyright © Edward B. Magrab 2009
Chapter 7
33
An Engineer’s Guide to MATLAB
Various contour plots without the surfaces can be created, either with labels or without labels.
The function
contour(x, y, z, v)
creates a 2D contour plot where
x, y, and z are the coordinates of the points that define the surface.
v, if a scalar, is the number of contours to be displayed and, if a vector of values, the contours of the surface at those values of z .
The use of v is optional.

Copyright © Edward B. Magrab 2009
Chapter 7
34
An Engineer’s Guide to MATLAB
If the contour plot is to be labeled, then we use the following pair of functions.
[C, h] = contour(x, y, z, v)clabel(C, h, v)

Copyright © Edward B. Magrab 2009
Chapter 7
35
An Engineer’s Guide to MATLAB
Illustration of contour and clabel
[x,y,z] = SurfExample;contour(x, y, z)
[x,y,z] = SurfExample;contour(x, y, z, 4)
-3 -2 -1 0 1 2 3
-2
0
2
4
6
8
10
12
-3 -2 -1 0 1 2 3
-2
0
2
4
6
8
10
12

Copyright © Edward B. Magrab 2009
Chapter 7
36
An Engineer’s Guide to MATLAB
[x,y,z] = SurfExample;[C, h] = contour(x, y, z);clabel(C, h)
[x,y,z] = SurfExample;v= [10, 30:30:120]; [clabel(C, h, v)
20
20
20
20
20
2020
20
20
40
40
40
40
40
40
40
40
60
60
60
60
60
60
80
80
80
80
80
100
100 100
100120
120 120
120140
140
140160
-3 -2 -1 0 1 2 3
-2
0
2
4
6
8
10
12
10
10
10
10
10
10
30
30 30
30
30
30
30
30
60
60
60
60
60
60
90
90
90
90120
120 120
120
-3 -2 -1 0 1 2 3
-2
0
2
4
6
8
10
12

Copyright © Edward B. Magrab 2009
Chapter 7
37
An Engineer’s Guide to MATLAB
To display the contours of the surface in 3D, we use
contour3(x, y, z, v)
where
x, y, and z are the coordinates of points that define the surface.
v, if a scalar, is the number of contours to be displayed and, if a vector of values, the contours of the surface at those values of z.
The use of v is optional.
To label the contour plot, we use the pair of functions
[C, h] = contour3(x, y, z, v)clabel(C, h, v)

Copyright © Edward B. Magrab 2009
Chapter 7
38
An Engineer’s Guide to MATLAB
To fill the region between the 2D contours with different colors, we use
contourf(x, y, z, v)
The values of the colors can be identified using
colorbar(s)
which places a bar of colors and their corresponding numerical values adjacent to the figure.
The quantity s is a string equal to either 'horiz' or 'vert' to indicate the orientation of the bar.
The default value is 'vert'.

Copyright © Edward B. Magrab 2009
Chapter 7
39
An Engineer’s Guide to MATLAB
Illustration of contour3, contourf, and colorbar
[x,y,z] = SurfExample;[C, h] = contour3(x, y, z);clabel(C, h)
[x,y,z] = SurfExample;[C, h] = contourf(x, y, z);colorbar
-3 -2 -1 0 1 2 3
-2
0
2
4
6
8
10
12
-3-2
-10
12
3
0
5
10
20
40
60
80
100
120
140
160
180
20
20
2020
20
20 20
20
20
40
40
40
40
40
40
40
40
6060
60
60
60
60
80 80
80
80
80
100
100
100
100
120
120
120
120
140
140
140
160
-3 -2 -1 0 1 2 3
-2
0
2
4
6
8
10
12
20
40
60
80
100
120
140
160
180
Copyright © Edward B. Magrab 2009
Chapter 7
40
An Engineer’s Guide to MATLAB
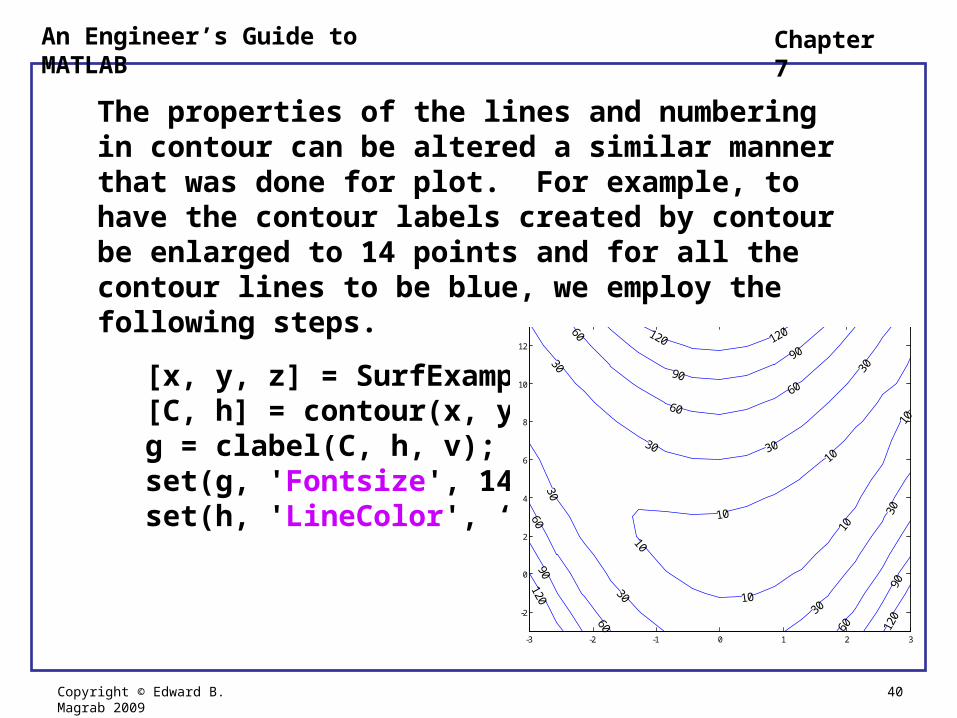
The properties of the lines and numbering in contour can be altered a similar manner that was done for plot. For example, to have the contour labels created by contour be enlarged to 14 points and for all the contour lines to be blue, we employ the following steps.
[x, y, z] = SurfExample; [C, h] = contour(x, y, z, v)g = clabel(C, h, v);set(g, 'Fontsize', 14)set(h, 'LineColor', ‘b')
10
10
10
10
10
10
30
30 30
30
30
30
30
30
60
60
60
60
60
60
90
90
90
90120
120 120
120
-3 -2 -1 0 1 2 3
-2
0
2
4
6
8
10
12

Copyright © Edward B. Magrab 2009
Chapter 7
41
An Engineer’s Guide to MATLAB
Generation of Cylindrical, Spherical, and Ellipsoidal Surfaces
One can use a 2D curve as a generator to create surfaces of revolution by using
[x, y, z] = cylinder(r, n)
which returns the x, y, and z coordinates of a cylindrical surface using the vector r to define a profile curve.
The function cylinder treats each element in r as a radius at n equally spaced points around its circumference.
If n is omitted, a value of 20 is used.

Copyright © Edward B. Magrab 2009
Chapter 7
42
An Engineer’s Guide to MATLAB
Example –
Consider the curve
= 1.1 + sin( ) 0 2r z z π
which is rotated 360 about the z-axis.
Let us take 26 equally spaced increments in the z-direction and 16 equally spaced increments in the circumferential direction.
The script to plot a cylindrical surface is
zz = linspace(0, 2*pi, 26);[x, y, z] = cylinder(1.1+sin(zz), 16);surf(x, y, z)axis off
Axis of rotation

Copyright © Edward B. Magrab 2009
Chapter 7
43
An Engineer’s Guide to MATLAB
Axis of rotation

Copyright © Edward B. Magrab 2009
Chapter 7
44
An Engineer’s Guide to MATLAB
To create a sphere, one can use
[x, y, z] = sphere(n);axis equalsurf(x, y, z)
where n is the number of n by n elements that will comprise the sphere of radius 1 centered at the origin.
If n is omitted, then n = 20.
-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1-1
-0.5
0
0.5
1

Copyright © Edward B. Magrab 2009
Chapter 7
45
An Engineer’s Guide to MATLAB
To create an ellipsoid, we use
[x, y, z] = ellipsoid(xc, yc, zc, xr, yr, zr, n);axis equalsurf(x, y, z)
which is centered at (xc, yc, zc) and has semi-axis lengths in the x, y, and z directions, respectively, of xr, yr, and zr.
In addition, n is the number of n by n elements that will comprise the ellipsoid.
If n is omitted, then n = 20.
-10
1
-3
-2
-1
0
1
2
3
-1
0
1
Copyright © Edward B. Magrab 2009
Chapter 7
46
An Engineer’s Guide to MATLAB
Viewing Angle
There are instances when one wants to change the default viewing angle of the 3D image because –
It does not display the features of interest.
Several different views are to be displayed using subplot.
Exploration of the surface from many different views is desired before deciding on the final orientation.
To determine the azimuth and elevation angle of the view, we use
[a, e] = view
where a is the azimuth and e the elevation.

Copyright © Edward B. Magrab 2009
Chapter 7
47
An Engineer’s Guide to MATLAB
To orient the object, one depresses the Rotate 3D icon in the figure window and orients the object until a satisfactory orientation is obtained.
Upon typing the previous expression in the command window, the values of the azimuth and elevation will be displayed.
These values are recorded and entered in the expression
view(an, en)
to create the desired orientation the next time that the script is executed.
In this expression, an and en are the numerical values of a and e taken from the command window.

Copyright © Edward B. Magrab 2009
Chapter 7
48
An Engineer’s Guide to MATLAB
Shading
The surfaces created with surf have used the default shading property called 'faceted'.
The function that changes the shading is
shading s
where s is a string equal to
faceted % Default
flat
interp

Copyright © Edward B. Magrab 2009
Chapter 7
49
An Engineer’s Guide to MATLAB
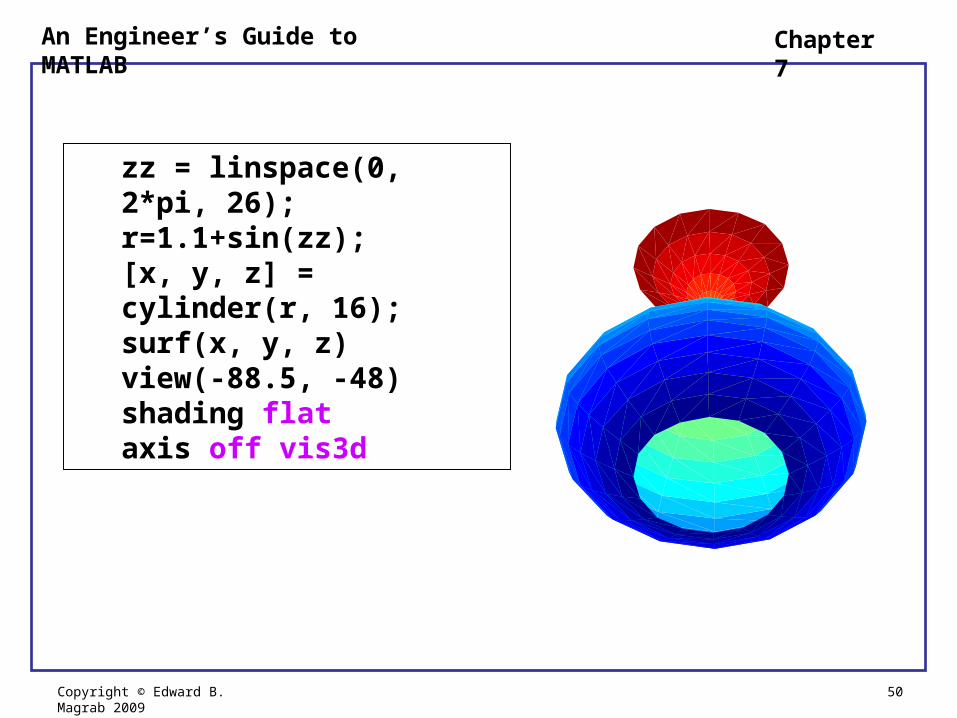
Illustration of view and shading
zz = linspace(0, 2*pi, 26);r=1.1+sin(zz);[x, y, z] = cylinder(r, 16);surf(x, y, z)view(-88.5, -48)shading facetedaxis off vis3d
Copyright © Edward B. Magrab 2009
Chapter 7
50
An Engineer’s Guide to MATLAB
zz = linspace(0, 2*pi, 26);r=1.1+sin(zz);[x, y, z] = cylinder(r, 16);surf(x, y, z)view(-88.5, -48)shading flataxis off vis3d

Copyright © Edward B. Magrab 2009
Chapter 7
51
An Engineer’s Guide to MATLAB
zz =linspace(0, 2*pi, 26);r=1.1+sin(zz);[x, y, z] =cylinder(r, 16);surf(x, y, z)view(-88.5, -48)shading interpaxis off vis3d

Copyright © Edward B. Magrab 2009
Chapter 7
52
An Engineer’s Guide to MATLAB
r = 1+sin(zz);[x, y, z] = cylinder(r, 16);surf(x, y, z)view(-88.5, -48)shading interpcolormap(copper)axis off vis3d

Copyright © Edward B. Magrab 2009
Chapter 7
53
An Engineer’s Guide to MATLAB
Transparency
The surfaces created with surf can have their opaqueness altered using set and assigning a numerical value to the keyword 'FaceAlpha'.
The effect of this keyword on the resulting surface is dependent on the type of shading chosen.
To illustrate the use of this transparency option, we create a function that generates the numerical values for the surface given by
cos (1 cos )
sin (1 cos )
(1 sin )
v
v
v
x a v u
y a v u
z ba u

Copyright © Edward B. Magrab 2009
Chapter 7
54
An Engineer’s Guide to MATLAB
If we assume that a = 1.13 and b = 1.14, then the function M file for this surface is
function [x, y, z] = Transparencya = 1.13; b = 1.14;uu = linspace(0, 2*pi, 30);vv = linspace(-15, 6, 45);[u, v] = meshgrid(uu, vv);x = a.^v.*cos(v).*(1+cos(u));y = -a.^v.*sin(v).*(1+cos(u));z = -b*a.^v.*(1+sin(u));

Copyright © Edward B. Magrab 2009
Chapter 7
55
An Engineer’s Guide to MATLAB
[x, y, z] = Transparency; surf(x, y, z)shading interpaxis vis3d off equalview([-35 38])
[x, y, z] = Transparency; h = surf(x, y, z)set(h, 'FaceAlpha', 0.4)shading interpaxis vis3d off equalview([-35 38])

Copyright © Edward B. Magrab 2009
Chapter 7
56
An Engineer’s Guide to MATLAB
[x, y, z] = Transparency; h = surf(x, y, z)set(h, 'FaceAlpha', 0.4)axis vis3d off equalview([-35 38])
Note: shading omitted.

Copyright © Edward B. Magrab 2009
Chapter 7
57
An Engineer’s Guide to MATLAB
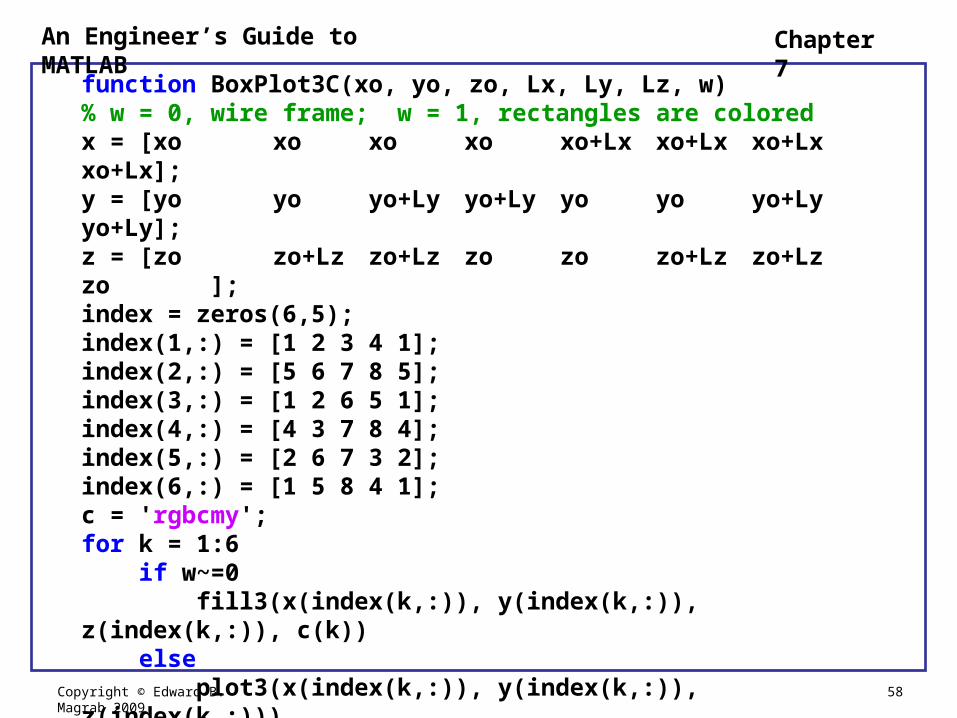
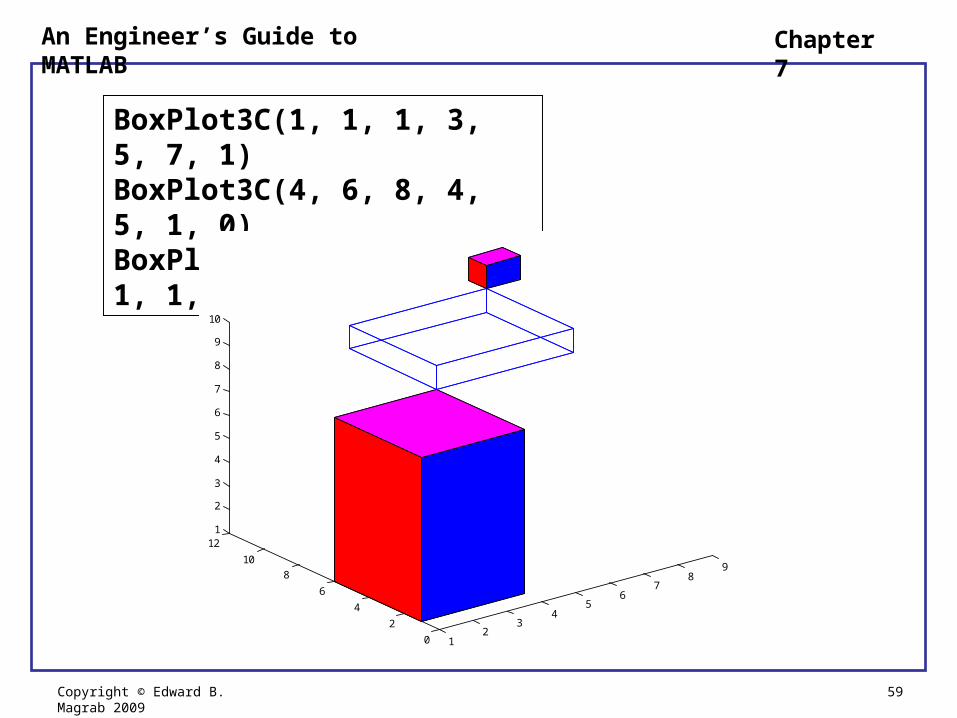
Example - Drawing Wire Frame Boxes: Coloring the Box Surfaces
We modify the M file BoxPlot3 so that all of the six surfaces represented by the rectangles are each filled with a different color.
This modification entails using fill3.
The revised BoxPlot3 is renamed BoxPlot3C and becomes
Copyright © Edward B. Magrab 2009
Chapter 7
58
An Engineer’s Guide to MATLAB
function BoxPlot3C(xo, yo, zo, Lx, Ly, Lz, w)% w = 0, wire frame; w = 1, rectangles are coloredx = [xo xo xo xo xo+Lx xo+Lx xo+Lx xo+Lx];y = [yo yo yo+Ly yo+Ly yo yo yo+Ly yo+Ly];z = [zo zo+Lz zo+Lz zo zo zo+Lz zo+Lz zo ];index = zeros(6,5);index(1,:) = [1 2 3 4 1];index(2,:) = [5 6 7 8 5];index(3,:) = [1 2 6 5 1];index(4,:) = [4 3 7 8 4];index(5,:) = [2 6 7 3 2];index(6,:) = [1 5 8 4 1];c = 'rgbcmy';for k = 1:6 if w~=0 fill3(x(index(k,:)), y(index(k,:)), z(index(k,:)), c(k)) else plot3(x(index(k,:)), y(index(k,:)), z(index(k,:))) end hold onend
Copyright © Edward B. Magrab 2009
Chapter 7
59
An Engineer’s Guide to MATLAB
BoxPlot3C(1, 1, 1, 3, 5, 7, 1)BoxPlot3C(4, 6, 8, 4, 5, 1, 0)BoxPlot3C(8, 11, 9, 1, 1, 1, 1)
12
34
56
78
9
0
2
4
6
8
10
121
2
3
4
5
6
7
8
9
10

Copyright © Edward B. Magrab 2009
Chapter 7
60
An Engineer’s Guide to MATLAB
Example - Intersection of a Cylinder and a Sphere and the Highlighting of Their Intersection
The curve that results from the intersection of a sphere of radius 2a centered at the origin and a circular cylinder of radius a centered at (a, 0) is given by the parametric equations
(1 cos )
sin
2 sin( / 2)
x a
y a
z a
where 0 4.

Copyright © Edward B. Magrab 2009
Chapter 7
61
An Engineer’s Guide to MATLAB
To create a sphere of radius 2a, we multiply each of the coordinates from the output of sphere by 2a.
The coordinates that are output from cylinder must be altered as follows:
x ax + ay ayz 4az 2a
We assume that a = 1. The script is

Copyright © Edward B. Magrab 2009
Chapter 7
62
An Engineer’s Guide to MATLAB
a = 1;[xs, ys, zs] = sphere(30);surf(2*a*xs, 2*a*ys, 2*a*zs)hold on[x, y, z] = cylinder;surf(a*x+a, a*y, 4*a*z-2*a)shading interpt = linspace(0, 4*pi, 100);x = a*(1+cos(t));y = a*sin(t);z = 2*a*sin(t/2);plot3(x, y, z, 'y-', 'Linewidth', 2.5);axis equal offview([45, 30])

Copyright © Edward B. Magrab 2009
Chapter 7
63
An Engineer’s Guide to MATLAB
Example - Enhancing 2D Graphs with 3D Objects: Volume of Sphere and Ellipsoid
For a sphere of radius a and an ellipsoid with its major axis in the x-direction equal to 2a, minor axis in the y-direction equal to 2b, and minor axis in the z-direction equal to 2c, the ratio of the volume of an ellipsoid to the volume of a sphere is
ellipse
sphere
V b cV
V a a
We create the following program to enhance the understanding of a plot of V as a function b/a for several values of c/a.

Copyright © Edward B. Magrab 2009
Chapter 7
64
An Engineer’s Guide to MATLAB
b = [0.5, 1]; c = b;for k = 1:2 plot(b, b*c(k), 'k-') text(0.75, (b(1)*c(k)+b(2)*c(k))/2-0.02, ['c/a = ' num2str(c(k))]) hold onendxlabel('b/a') ylabel('V')for k = 1:4 switch k case 1 axes('position', [0.12, 0.2, 0.2, 0.2]) [xs, ys, zs] = ellipsoid(0, 0, 0, 1, b(1), c(1), 20); mesh(xs, ys, zs) text(0, 0, 1, ['b/a = ' num2str(b(1)) ' c/a = ' num2str(c(1))]) case 2 axes ('position', [0.1, 0.5, 0.2, 0.2]) [xs, ys, zs] = ellipsoid(0, 0, 0, 1, b(1), c(2), 20); mesh (xs, ys, zs) text (0, 0, 1.5, ['b/a = ' num2str(b(1)) ' c/a = ' num2str(c(2))])

Copyright © Edward B. Magrab 2009
Chapter 7
65
An Engineer’s Guide to MATLAB
case 3 axes ('position', [0.7, 0.65, 0.2, 0.2]) [xs, ys, zs] = ellipsoid(0, 0, 0, 1, b(2), c(2), 20); mesh (xs, ys, zs) text (-1.5, 0, 2, ['b/a = ' num2str(b(2)) ' c/a = ' num2str(c(2))]) case 4 axes ('position', [0.7, 0.38, 0.2, 0.2]) [xs, ys, zs] = ellipsoid(0, 0, 0, 1, b(2), c(1), 20); mesh (xs, ys, zs) text (-1.5, 0, 1.5, ['b/a = ' num2str(b(2)) ' c/a = ' num2str(c(1))]) end colormap([0 0 0]) axis equal offend

Copyright © Edward B. Magrab 2009
Chapter 7
66
An Engineer’s Guide to MATLAB
0.5 0.6 0.7 0.8 0.9 10.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
c/a = 0.5
c/a = 1
b/a
V
b/a = 0.5 c/a = 0.5
b/a = 0.5 c/a = 1
b/a = 1 c/a = 1
b/a = 1 c/a = 0.5

Copyright © Edward B. Magrab 2009
Chapter 7
67
An Engineer’s Guide to MATLAB
Example – Natural Frequencies of a Beam Restrained by a Spring
The natural frequency coefficient for an Euler-Bernoulli hinged at both ends and restrained at an interior point 1 by a spring with nondimensional stiffness Ks is determined from
31 1 2 1( ) ( ) 0s n n n n nK C T C R
1 11 2 2
1 12 2 2
( ) ( [1 ]) ( ) ( [1 ])
( ) ( )
( ) ( [1 ]) ( ) ( [1 ])
( ) ( )
( ) 0.5 sinh sin
( ) 0.5 sinh sin
n n n nn
n n
n n n nn
n n
T T R RC
R T
T R R TC
R T
R x x x
T x x x
where
Copyright © Edward B. Magrab 2009
Chapter 7
68
An Engineer’s Guide to MATLAB
There are two parameters that are of interest: 1 and
Ks.
We shall generate a surface of the lowest natural frequency coefficient 1 as a function of 1 and
log10(Ks).
Then we shall use these same natural frequency coefficients to create a contour plot of log10(Ks) versus
1 for several values of 1/.
The program is

Copyright © Edward B. Magrab 2009
Chapter 7
69
An Engineer’s Guide to MATLAB
function BeamWithSpringNeta1 = 28; NKs = 21; Kend = 4;Ks = logspace(0, Kend, NKs);Om = linspace(0.02, 10, 50);Omeg = zeros(Neta1, NKs);eta1 = linspace(0, 1, Neta1); for et = 1:Neta1 for kss = 1:NKs D = NFEqnBeamWithKs(Om, Ks(kss), eta1(et)); for k = 2:length(Om) if D(k)*D(k-1) < 0 Omeg(et, kss) = fzero(@NFEqnBeamWithKs, …
[Om(k-1), Om(k)], [], Ks(kss), eta1(et)); break end end endend

Copyright © Edward B. Magrab 2009
Chapter 7
70
An Engineer’s Guide to MATLAB
figure(1)mesh(eta1, log10(Ks), (Omeg/pi)')xlabel('\eta_1')ylabel('log_{10}(K_s)')zlabel('\Omega_1/\pi')view([-15,30])a = axis; a(4) = Kend;axis(a)figure(2)[C, h] = contour(eta1, log10(Ks), (Omeg/pi)');clabel(C, h)xlabel('\eta_1')ylabel('log_{10}(K_s)')

Copyright © Edward B. Magrab 2009
Chapter 7
71
An Engineer’s Guide to MATLAB
function C = NFEqnBeamWithKs(Om, Ks, eta1)CA = T(Om*eta1).*(T(Om).*T(Om*(1-eta1))-R(Om).*R(Om*(1-eta1)));CB = R(Om*eta1).*(T(Om).*R(Om*(1-eta1))-R(Om).*T(Om*(1-eta1)));C = CA+CB+(R(Om).^2-T(Om).^2)*Om.^3/Ks;
function r = R(x)r = 0.5*(sinh(x)+sin(x));
function t = T(x)t = 0.5*(sinh(x)-sin(x));

Copyright © Edward B. Magrab 2009
Chapter 7
72
An Engineer’s Guide to MATLAB

Copyright © Edward B. Magrab 2009
Chapter 7
73
An Engineer’s Guide to MATLAB

Copyright © Edward B. Magrab 2009
Chapter 7
74
An Engineer’s Guide to MATLAB
Example – Rotation and Translation of 3D Objects: Euler Angles
The rotation and translation of a point p(x,y,z) to another location P(X,Y,Z) is given by
11 12 13
21 22 23
21 22 23
x
y
z
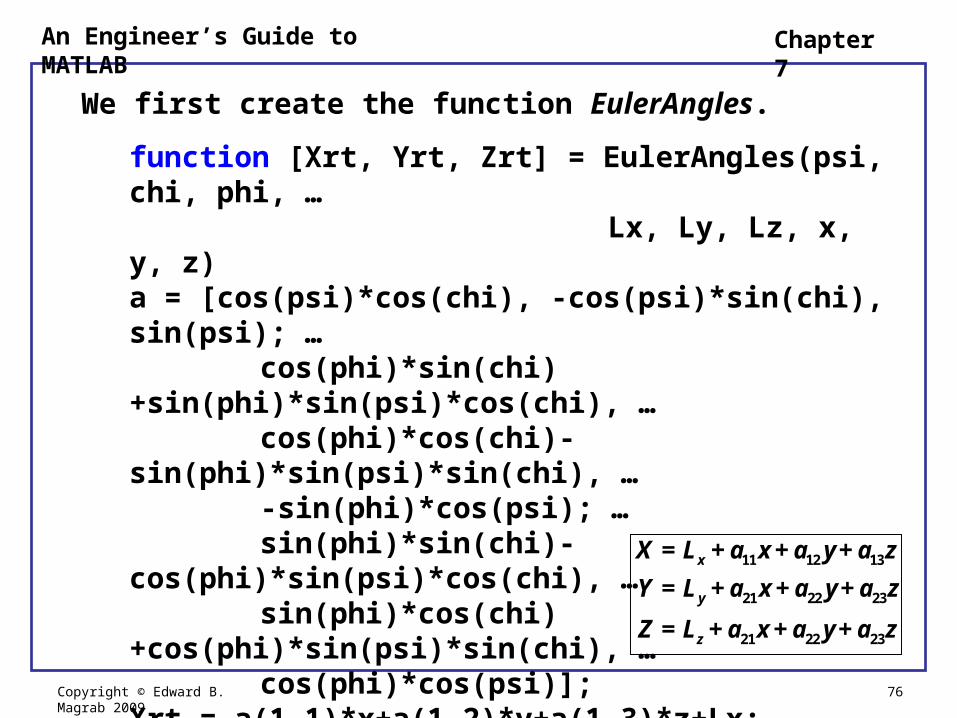
X = L + a x + a y + a z
Y = L + a x + a y + a z
Z = L + a x + a y + a z
where Lx, Ly, and Lz are the x, y, and z components of the translation, respectively, and aij, i, j = 1, 2, 3, are the elements of
cos cos -cos sin sin
= cos sin + sin sin cos cos cos - sin sinψsin -sin cos
sin sin - cos sin cos sin cos + cos sinψsin cos cos
ψ χ ψ χ ψ
a φ χ φ ψ χ φ χ φ χ φ ψ
φ χ φ ψ χ φ χ φ χ φ ψ

Copyright © Edward B. Magrab 2009
Chapter 7
75
An Engineer’s Guide to MATLAB
The quantities , , and are the ordered rotation angles (Euler angles) of the coordinate system about the origin –
about the x-axis
then about the y-axis
then about the z-axis
In general, (x,y,z) can be scalars, vectors of the same length, or matrices of the same order.
Copyright © Edward B. Magrab 2009
Chapter 7
76
An Engineer’s Guide to MATLAB
We first create the function EulerAngles.
function [Xrt, Yrt, Zrt] = EulerAngles(psi, chi, phi, … Lx, Ly, Lz, x, y, z)
a = [cos(psi)*cos(chi), -cos(psi)*sin(chi), sin(psi); … cos(phi)*sin(chi)+sin(phi)*sin(psi)*cos(chi),
… cos(phi)*cos(chi)-sin(phi)*sin(psi)*sin(chi),
… -sin(phi)*cos(psi); … sin(phi)*sin(chi)-cos(phi)*sin(psi)*cos(chi),
… sin(phi)*cos(chi)+cos(phi)*sin(psi)*sin(chi),
… cos(phi)*cos(psi)];
Xrt = a(1,1)*x+a(1,2)*y+a(1,3)*z+Lx;Yrt = a(2,1)*x+a(2,2)*y+a(2,3)*z+Ly;Zrt = a(3,1)*x+a(3,2)*y+a(3,3)*z+Lz;
11 12 13
21 22 23
21 22 23
x
y
z
X = L + a x + a y + a z
Y = L + a x + a y + a z
Z = L + a x + a y + a z
Copyright © Edward B. Magrab 2009
Chapter 7
77
An Engineer’s Guide to MATLAB
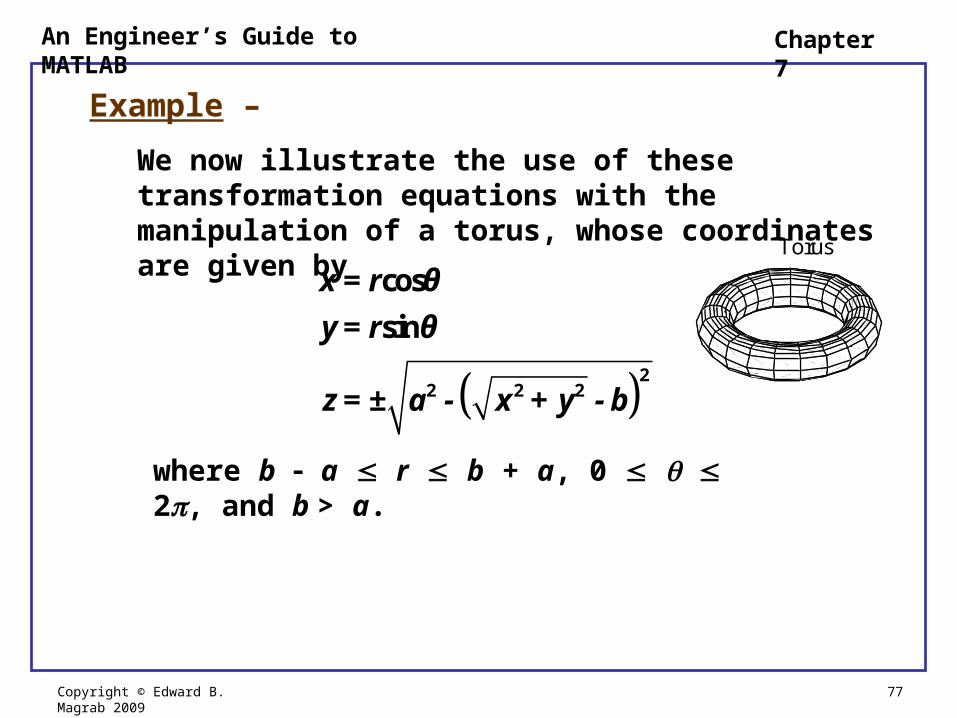
Example –
We now illustrate the use of these transformation equations with the manipulation of a torus, whose coordinates are given by
22 2 2
cos
sin
x = r θ
y = r θ
z = ± a - x + y - b
where b a r b + a, 0 2, and b > a.
Torus = 60
= 60 = 60 = 60

Copyright © Edward B. Magrab 2009
Chapter 7
78
An Engineer’s Guide to MATLAB
We first create the following function to obtain the coordinates of the torus.
function [X, Y, Z] = Torus(a, b)r = linspace(b-a, b+a, 10); th = linspace(0, 2*pi, 22);x = r'*cos(th); y = r'*sin(th); z = real(sqrt(a^2-(sqrt(x.^2+y.^2)-b).^2));X = [x x]; Y = [y y]; Z = [z -z];
where real is used to eliminate any small imaginary parts caused by numerical round-off.
22 2 2
cos
sin
x = r θ
y = r θ
z = ± a - x + y - b
Torus = 60
= 60 = 60 = 60

Copyright © Edward B. Magrab 2009
Chapter 7
79
An Engineer’s Guide to MATLAB
We obtain four plots of the torus:
(1) No rotations.
(2) Rotated 60 about the x-axis ( = 60) and compared to the orientation of the original torus.
(3) Rotated 60 about the y-axis ( = 60) and compared to the orientation of the original torus.
(4) Rotated 60about the x-axis ( = 60), rotated 60 about the y-axis ( = 60) and compared to the orientation of the original torus.
We assume that a = 0.2 and b = 0.8 and we use colormap to produce a mesh of black lines.

Copyright © Edward B. Magrab 2009
Chapter 7
80
An Engineer’s Guide to MATLAB
The script is[X, Y, Z] = Torus(0.2, 0.8);psi = [0, pi/3, pi/3]; chi = [0, 0, 0]; phi = [pi/3,0, pi/3];Lx = 0; Ly = 0; Lz = 0;for k = 1:4 subplot(2,2,k)
if k==1 mesh(X, Y, Z) else mesh(X, Y, Z) hold on [Xr Yr Zr] = EulerAngles(psi(k-1), chi(k-1), … phi(k-1), Lx, Ly, Lz, X, Y, Z); mesh(Xr, Yr, Zr) end

Copyright © Edward B. Magrab 2009
Chapter 7
81
An Engineer’s Guide to MATLAB
switch k case 1
text(0.5, -0.5, 1, 'Torus') case 2
text(0.5, -0.5, 1,'\phi = 60\circ') case 3 text(0.5,-0.5,1,'\psi = 60\circ') case 4
text(0.5, -0.5, 1.35,'\psi = 60\circ')text(0.55, -0.5, 1,'\phi = 60\circ')
end colormap([0 0 0]) axis equal off grid offend

Copyright © Edward B. Magrab 2009
Chapter 7
82
An Engineer’s Guide to MATLAB
Torus = 60
= 60 = 60
= 60