alkalmazott geometria - lakos/alkg0206.pdf · 2012-12-16 · anyagrészeket, amelyek terjedelmi...
TRANSCRIPT
Alkalmazott geometria
Verzió: 0.206
2012. XII. 16.
Bevezetés• Alkalmazott geometria:
Alkalmazások szempontjából fontos geometriai módszerek.
Várható tematika:
– Ismétlés: 3-dimenziós vektoralgebra, lineáris algebra
– Koordinátageometria, affin koordináták
– Projektív geometria, az ábrázoló geometria alapelvei
– Differenciálgeometria, görbék, felületek
– Polinom és spline- approximáció és interpoláció, görbék, felületek
– Geometriai algoritmusok
• ZH-k: Gyakorlatokon.
• Előismeretek:
– geometria: klasszikus 3-vektorok, térelemek;
– algebra: lineáris algebra;
– analízis: deriválás, beleértve parciális deriváltak, görbék.
• Letöltető innen:
http://www.cs.elte.hu/~lakos
1
A jegyzetről:
Köszönet a jegyzet írásához nyújtott segítségért Podobni Katalinnak és Szeghy Dávidnak.
Az itt szereplő anyag részben bővebb, részben pedig szűkebb az előadások elhangzottaknál.Egyrészt, tartalmaz bizonyos kiegészítő információkat, melyek az anyag mélyebb megértésétsegítik elő, még ha ezek első látásra inkább körülményesebbeknek is tűnnek; illetve tartalmazanyagrészeket, amelyek terjedelmi okok miatt nem férnek bele az előadásba. Másrészt, ajegyzet nem tartalmaz ábrákat, és bizonyos indoklásokat, illetve részletes hivatkozásokat.
Vizsgánál minden esetben az előadáson elhangzottak veendők alapul.
A jegyzet jelenlegi formájában csak félig kész; és sok elírást is tartalmaz. De ha valakineksegítséget nyújt a felkészülésben, az OK.
2

Tartalomjegyzék1. Emlékeztető: Vektorok a 3-dimenziós térben 5
2. Kiegészítés: A vektorszorzatokban rejlő információk 8
3. Emlékeztető: Sík és egyenes reprezentációja 11
4. Vektorok térelemes feladatokban (röviden) 14
5. Vektorok térelemes feladatokban (részletesebben) 15
6. Emlékeztető: Lineáris algebra, mátrixok 19
7. Emlékeztető: Bilineáris formák 26
8. A Gram-Schmidt-ortogonalizáció 29
9. Mátrixok inverze 33
10.Komplex számok négyzetgyökvonása 35
11.2× 2-es szimmetrikus mátrixok 36
12.Elméleti feladatok: Vektorok, mátrixok 38
13.Gyakorlaton: Lineáris transzformációk témakör 40
14.Elméleti feladatok: Ortogonális mátrixok 44
15.Affin koordinátarendszerek 47
16.Bázis- és koordinátaáttérés affin rendszerben 49
17.Egybevágóságok gyakorlati implementációja. 51
18.Infinitezimális mozgások 53
19.Gyakorlaton: Néhány konkrét affin mátrix 59
20.A projektív sík konstrukciója 61
21.Illeszkedések, dualitás 64
22.Projektív leképezések 66
23.Kettősviszony 69
24.Másodrendű görbék (kúpszeletek) 73
3

25.Másodrendű görbék geometriája 77
26.Gyakorlaton: Manipulációk kúpszeletekkel 79
27.Kúpszeletek kanonikus alakra hozása, részletesen 81
28.Kúpszeletek osztályozása (kivonat) 89
29.A projektív tér 91
30.Egyenesek analitikus leírása a projektív térben 93
31.Másodrendű felületek 96
32.Másodrendű (hiper)felületek általában 98
33.Baricentrikus koordináták 101
34.Differenciálgeometria: görbék, alapok 103
35.Frenet-bázis síkban 106
36.Frenet-bázis térben 109
37.Felületek 116
38.Implicit alakban adott görbék és felületek 121
39.Elméleti feladatok: Differenciálgeometria 128
40.Görbék és felületek számítógépes ábrázolása 130
41.Bézier-görbék 132
42.Spline interpoláció 136
43.B-spline-ok 139
44.Összehasonlítás a Lagrange interpolációval 144
45.Bézier-felületek 145
46.Racionális approximáció 148
47.Irodalmi útmutató 149
4

1. Emlékeztető: Vektorok a 3-dimenziós térbenEzek a szokásos 3-dimenziós térhez kapcsolt geometriai vektorok.
• Vektorok: rendezett pontpárok (nyilak) ekvivalenciaosztályai
• a+ b, λa, → algebrai értelemben vektortér struktúra
i, j, k bázis, ezzel a = a1i+ a2j+ a3k = ⟨a1, a2, a3⟩
De több van, mint csak vektortér struktúra, mert geometriai szándék szerint
• i, j, k merőleges egység hosszú vektorok;
• az i, j, k vektorok (ebben a sorrendben) jobbsodrású rendszert alkotnak.
Ez a plusz geometriai információ további algebrai struktúrákban testesül meg: ilyen a skaláris,vektoriális és vegyesszorzat.
Skaláris szorzat
• |a| az a hossza. Pythagoras tétele szerint
|a| =√a21 + a22 + a23.
• Skaláris szorzat:ab = |a| |b| cosω,
ahol ω a bezárt szög. (Ha valamelyik vektor a nullvektor, akkor a szög tetszőlegesnekvehető.)
• A kiszámolás praktikus módja:
ab = a1b1 + a2b2 + a3b3.
• Fontos kvalitatív tulajdonság:
ab = 0 ⇔ a⊥b.
(A nullvektor mindenre merőleges.)
• A skaláris szorzás bilineáris, kommutatív, de szigorú asszociavitásról nincs is értelmebeszélni.
• A skaláris szorzat a hosszal közvetlen artitmetikai kapcsolatban van, egyik a másikkalkifejezhető:
|a|2 = aa,
ill.ab =
1
4
(|a+ b|2 − |a− b|2
).
A gyakorlatban nagyon hasznos a hosszról skaláris szorzatra áttérni.
5

• A skaláris szorzat felhasználható vektorok más vektorok szerinti párhuzamos és merőle-ges komponensek szerinti felbontására.A b vektor a vektorral párhuzamos komponense:
proja b =ab
|a|2a.
A b vektor a vektorra merőleges komponense:
proj⊥a b = b− ab
|a|2a.
Vektoriális szorzat
• a× b definíciója:
1. |a× b| = |a| |b| sinω;2. a, b ⊥ a× b;3. a, b, a× b jobbsodrású vagy elfajuló.
• A kiszámolás praktikus módja:
a× b =
∣∣∣∣∣∣i j ka1 a2 a3b1 b2 b3
∣∣∣∣∣∣ .• Fontos kvalitatív tulajdonság:
a× b = 0 ⇔ a ∥ b.
(A nullvektor mindennel párhuzamos.)
• Bilineáris. Antikommutatív:a× b = −b× a.
Nem asszociatív, hanem: Kifejtési tétel:
(a× b)× c = (ac)b− (bc)a,
a× (b× c) = (ac)b− (ab)c.
• Szemléletes tartalom:Kifeszített parallelogramma területe lapra merőleges, a jobbkéz-szabályhoz igazodó irá-nyú vektorral.
• Alkalmazás:→Két vektorra merőleges harmadik vektor készítése;
→Az−→AB,
−→AC vektorok által kifeszített parallelogramma területe:
T = |(−→AB ×
−→AC)|;
→Az−→AB,
−→AC vektorok által kifeszített háromszög területe:
T =1
2|(−→AB ×
−→AC)|.
6

Vegyes szorzat
• Definíció (és felcserélési tétel):
a(b× c) = (a,b, c) = (a× b)c.
• A kiszámolás praktikus módja:
abc ≡ (a,b, c) =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ .• Szimmetriaviszonyok:
Páros permutáció a,b, c-ben → a vegyes szorzat nem változik.
Páratlan permutáció a,b, c-ben → a vegyes szorzat (−1)-szeresére változik.
• Szemléletes jelentés:
Az a,b, c kifeszített parallelepipedon térfogata
+ előjellel, ha jobbrendszer;
− előjellel, ha balrendszer;
illetve 0, ha a vektorrendszer elfajuló.
• Alkalmazás:
→komplanaritás tesztelés;
→jobb/bal rendszer tesztelés;
→az−→AB,
−→AC,
−−→AD vektorok által kifeszített parallelepipedon térfogata:
V = |(−→AB,
−→AC,
−−→AD)|;
→az−→AB,
−→AC,
−−→AD vektorok által kifeszített tetraéder térfogata:
V =1
6|(−→AB,−→AC,−−→AD)|.
7

2. Kiegészítés: A vektorszorzatokban rejlő információkA következő jellemzések némileg filozófianak tűnnek, de matematikailag precízzé tehetőek.
A szokásos 3-dimenziós esetben
• I. Ekvivalens információval bírnak:
– a skaláris szorzat ismerete;
– a vektorok hosszának ismerete;
– annak a tudása, hogy a i, j,k vektorok merőleges, egységhosszú vektorok.
• III. Ekvivalens információval bírnak:
– a vegyesszorzat ismerete;
– irányítás és térfogat ismerete;
– i, j,k vektorok jobbrendszert alkotnak és egy egységtérfogatú parallelogrammátkeszítenek ki.
Megjegyzés: Egy pozitív térfogatfüggvényt már a skaláris szorzat is meghatároz, ez egyjóval speciálisabb ismeret, mint a skaláris szorzat; de az irányítás olyan plusz információ,amely nem következik a skaláris szorzatból, attól teljesen független.
A skaláris szorzat és vegyesszorzat egymásra nézve kölcsönösen nem meghatározóak,de kompatibilitásuk (azaz, hogy ugyanazt a térfogatfogalmat szolgáltassák) egymásranézve részleges kötöttségeket jelent.
• II. Ekvivalens információval bírnak:
– a vektoriális szorzat ismerete;
– skalárszorzat és irányítás ismerete;
– az, hogy i, j,k vektorok jobbrendszert alkotnak páronként merőleges egységhosszúvektorok.
A vektoriális szorzat már meghatároz egy kompatibilis skaláris és vegyes szorzatot. Va-lóban, ha tudjuk, hogy u,v,w nemnulla vektorok olyanok, hogy
u× v = w, v ×w = u, w × u = v,
akkor tudjuk, hogy u,v,w jobbrendszert alkotó, páronként merőleges, egységhosszúvektorok, és ebből a skaláris szorzat és irányítás, illetve a vegyesszorzat így már re-konstruálható.
Fordítva, a skaláris szorzat és egy irányítás már meghatározza a vektoriális szorzatot.Valóban, a vektoriális szorzat geometriai definíciója lényegében ezen a alapul. (A szöginformáció rekonstruálható a skaláris szorzatból.) Speciálisan a skaláris szorzat és avegyes szorzat már meghatározza a vektoriális szorzatot.
8

Summa summarum a legerősebb információt a vektoriális szorzat adja, és ez épp olyan erős,mint a skaláris szorzat és a vegyes szorzat egyben. Sajnos a vektoriális szorzat ilyen formábancsak a három dimenziós térben létezik.
Lényeg, hogy az összes plusz információ, ami a különféle vektorszorzatokban megtestesülekvivalens egy skalárszorzat és egy irányítás specifikációjával.
Általános dimenziószám esetén
Az n-dimenziós térben a skaláris szorzat hasonlóan, egy 2 tényezős szorzat; a vektoriálisszorzat általánosítás egy (n−1) tényezős szorzat, a vegyes szorzat általánosítás egy n tényezősszorzat.
Mivel általános dimenziószám esetén a geometriai intuíció kevésbé nyilvánvaló, ezért a de-finíciókat először analitikus alakban adjuk meg. Tegyük fel, hogy e1, e2, . . . , en kitüntett bázis.(Nem maga a bázis a lényes, hanem, hogy majd úgy gondolhatunk rá, mint egy ortonormált,pozitív irányítású bázis; én ennek megfelelően tudjuk más bázisokkal helyettesíteni.)
• Az x = x1e1 + . . .+ xnen és a y = y1e1 + . . .+ ynen vektorok skaláris szorzata
xy = x1y1 + . . . xnyn.
• Az xi = x(i)1 e1 + x
(i)2 e2 + . . .+ x
(i)n en (1 ≤ i ≤ n− 1) vektorok általánosított vektoriális
szorzata
E(x1, . . . ,xn−1) =
∣∣∣∣∣∣∣∣∣∣∣∣
x(1)1 x
(2)1 · · · x
(n−1)1 e1
x(1)2 x
(2)2 · · · x
(n−1)2 e2
...... . . . ...
...x(1)n−1 x
(2)n−1 · · · x
(n−1)n−1 en−1
x(1)n x
(2)2 · · · x
(n−1)n en
∣∣∣∣∣∣∣∣∣∣∣∣.
• Az xi = x(i)1 e1 + x
(i)2 e2 + . . .+ x
(i)n en (1 ≤ i ≤ n) vektorok általánosított vegyes szorzata
V (x1, . . . ,xn) =
∣∣∣∣∣∣∣∣∣∣∣∣
x(1)1 x
(2)1 · · · x
(n−1)1 x
(n)1
x(1)2 x
(2)2 · · · x
(n−1)2 x
(n)2
...... . . . ...
...x(1)n−1 x
(2)n−1 · · · x
(n−1)n−1 x
(n)n−1
x(1)n x
(2)2 · · · x
(n−1)n x
(n)n
∣∣∣∣∣∣∣∣∣∣∣∣.
Ezeket a 3 dimenziós esethez hasonlóan lehet leírni geometriailag:
• A skalárszorzatot a kiinduló vektorok hosszával és a közbezárt szöggel jellemezhető aszokásos módon.
• A vektoriális szorzat, egy a kiinduló vektorok által kifeszített (n − 1) dimenziós paral-lelotóp felületével egyező hosszú, a parallelotóp síkjára merőleges, megfelelő irányú (azirányítással kompatibilis) vektort ad.
9

• A vegyes szorzat a kiinduló vektorok által kifeszített n dimenziós parallelotóp előjeles(az irányítással kompatibilis) térfogatát adja meg.
Az egyes szorzatfogalmak információrtartalma a dimenziós számától függően:
• n = 1: A skaláris szorzat a vektorok hosszának ismeretével egyenlő. A vektoriálisszorzat az e1 egységalapvektor kijelölését jelenti. A vegyes szorzat az mondja meg hogya kérdéses vektor hányszorosa a e1 egységalapvektornak.
Ilyenkor a vektoriális szorzat és a vegyesszorzat információtartalma megegyezik, és mind-egyik erősebb a skaláris szorzatnál (az irányítás a plusz információ.)
• n = 2: A skaláris szorzat megint csak a vektorok hosszának ismeretével egyenlő. Avektoriális szorzat analógiája a +90-os elforgatás:
E(x1e1 + x2e2) = −x2e1 + x1e2 = (x1e1 + x2e2).
A vegyesszorzat a szokásos területi forma:
V (x1e1 + x2e2, y1e1 + y2e2) =
∣∣∣∣x1 y1x2 y2
∣∣∣∣ .Itt a vektoriális szorzat még egy elég gyenge tudás, nem erősebb sem a skaláris szorzat-nál, sem a vegyesszorzatnál.
Valójában, a kompatibilitási feltételek szerint, egyik szorzat sem rejt több információt,mint a másik, de bármely kettő meghatározza a másikat.
• n = 3 az, amit fent tárgyaltunk.
• n ≥ 4-re a szorzatok hierarchiája olyan, mint a 3 dimenzióban.
Megintcsak a lényeg az, hogy az összes plusz információ, ami a különféle vektorszorzatokbanmegtestesül ekvivalens egy skalárszorzat és egy irányítás specifikációjával
Megemlítendő még, hogy n = 7-re létezik a vektoriális szorzatnak egy relatíve jól működőkéttényezős általánosítása. Ez a 7-dimenziós vektoriális szorzat úgy viszonyul a oktávokhoz(Cayley-számokhoz), ahogy a 3-dimenziós vektoriális szorzat viszonyul a kvaterniókhoz.
10

3. Emlékeztető: Sík és egyenes reprezentációja3.1. Sík a térben leírható az
n(r− r0) = 0
egyenlettel, ahol n = ⟨a, b, c⟩ a sík egy normálvektora, r0 = ⟨x0, y0, z0⟩ a sík egy rögzítettpontja, r = ⟨x, y, z⟩ a sík általános pontja.
Kifejtve:a(x− x0) + b(y − y0) + c(z − z0) = 0,
avagyax+ by + cz − ax0 − by0 − cz0 = 0,
illetve tagokat egybevonva:ax+ by + cz + d = 0.
Fordítva, ha van egy egyenlet mint fent, ahol a, b, c nem mind nulla, akkor az vektorossíkegyenlet alakra hozható. Itt normálvektornak n = ⟨a, b, c⟩ választható. Az r0-nak legké-nyelmesebben a ⟨−d
a, 0, 0⟩, ⟨0,−d
b, 0⟩, ⟨0, 0,−d
c⟩ helyvektorok valamelyike választható bár itt
figyelemmel kell lennünk arra, hogy mely együtthatók nem nullák. (Ezek helyvektorok a síka koordinátatengelyekkel való metszéspontjait adják meg a megfelelő esetekben.)
Univerzális választás r0-ra
r0 =
⟨− da
a2 + b2 + c2,− db
a2 + b2 + c2,− dc
a2 + b2 + c2
⟩(ami egyébként a sík origóhoz legközelebbi pontjának felel meg).
A legkényelmesebb a koordinátaegyenletes felírás. A vektoros egyenlet felírásánál sokszabadság van: n nemnulla skalár szorzó erejéig, r0 pedig n-re merőleges eltolás erejéig adott.A koordinátás felírás szabadsága: nemnulla skalár szorzó erejéig.
3.2. Egyenes a térben leírható azr = r0 + vt,
t ∈ R paraméteres egyenlettel, ahol r0 = ⟨x0, y0, z0⟩ az egyenes egy pontja, v = ⟨a, b, c⟩ azegyenes egy irányvektora, r = ⟨x, y, z⟩ az egyenes általános pontja. Kifejtve:
x = x0 + at,
y = y0 + bt,
z = z0 + ct,
t ∈ R. Itt megint sokféle szabadság van a felírásnál: v nemnulla skalár szorzó erejéig, r0 pedigv-vel való párhuzamos eltolás erejéig.
3.3. Megjegyzés. Itt az egyenes és a sík két lényegesen különböző módon lett prezentálva:Az egyenes esetében paraméteres (explicit) felírást alkalmaztunk; a sík esetében (implicit)egyenletes felírást alkalmazunk. Ez a két típusú felírás egészen máshogy viselkedik. Általában,magasabb dimenzióban is ezt a kétféle felírást használjuk:
11

3.4. Paraméteres felírás: Ha Ω egy paramétertartomány, akkor az U ⊂ Rn alakzatotfelírhatjuk a
g : Ω → Rn
függvény segítségével. Ekkor maga a ponthalmaz
U = g(Ω).
Ha f : Rn → Rm az alakzatot transzformálja, akkor az alakzat
f(U)
képét ag = f g : Ω → Rm
függvény parametrizálja.
3.5. Implicit egyenletes felírás: Az U alakzatot időnként úgy írjuk le, hogy tekintünk egy
h : Rn → Rs
függvényt, amelyre U pontosan azon (x1, . . . , xn) pontok halmaza, amelyekere
h(x1, . . . , xn) = 0
teljesül. (Ez ah1(x1, . . . , xn) = 0
...
hs(x1, . . . , xn) = 0
egyenletrendszernek felel meg.)Ha f : Rn → Rm az alakzatot transzformálja, akkor az alakzat
f(U)
képét azh∗ = h f−1 : Rm → Rs
segítségével kapotth∗(x1, . . . , xn) = 0
egyenlet írja le.(Ez a
h1((f−1)1(x1, . . . , xm), . . . , (f
−1)n(x1, . . . , xm)) = 0
...
hs((f−1)1(x1, . . . , xm), . . . , (f
−1)n(x1, . . . , xm)) = 0
egyenletrendszernek felel meg.)
12

3.6. Megjegyzés. Bár a megszorító egyenlettel való, implicit leírás kényelmesebb a térbelisík leírására; a paraméteres, explicit leírás is alkalmazható: Ha r0 a sík pontja, és r1, r2 asíkkal párhuzamos („síkban fekvő”), egymással nem párhuzamos vektorok, akkor a sík általánospontja az
r(u, v) = r0 + ur1 + vr2
alakú, ahol u, v ∈ R. Itt r0, r1, r2 mind sokféleképpen választható. A vektorokat kifejtve ez a
g : Ω = R2 → R3
(u, v) 7→ (a0 + ua1 + va2, b0 + ub1 + vb2, c0 + uc1 + vc2)
paraméterező függvényt szolgáltatja (ahol ri = ⟨ai, bi, ci⟩, i = 0, 1, 2).Ez a forma ugyan kevésbé alkalmas térelemes feladatok megoldására, de általánosabb
felületeket már ilyen elven lesz célszerű leírni, hogy igazán jól számolhassunk velük.
3.7. Megjegyzés. (Nem kell vizsgára.) Bár a paraméteres, explicit leírás kényelmesebb atérbeli egyenes leírására; megszorító egyenlettel való, implicit leírás is alkalmazható:
Ha r0 az egyenes pontja, és r1, r2 az egyenesre merőleges, de egymással nem párhuzamosvektorok, akkor az egyenes általános r pontjai pont azok, amelyekre az
(r− r0)r1 = 0
(r− r0)r2 = 0
megszorító egyenletek teljesülnek. Kifejtve, az egyenes pontjait az
a1x+ b1y + c1z + d1 = 0
a2x+ b2y + c2z + d2 = 0
egyenletrendszer írja le. Másként, az egyenes pontjai a
h : R3 → R2
(x, y, z) 7→ (a1x+ b1y + c1z + d1, a2x+ b2y + c2z + d2)
függvény nullhelyei.A megszorító egyenletrendszerre úgy is gondolhatunk, hogy az egyenest két sík metszete-
ként állítja elő. A síkok nem egyértelműek, hiszen pl. bármelyik síkegyenlet helyettesíthetőa
λ1(a1x+ b1y + c1z + d1) + λ2(a2x+ b2y + c2z + d2) = 0
síkegyenlettel, ahol λ1, λ2 = 0 (ez kiadja az egyenesre illeszkedő többi síkot, vagyis az egyenesreilleszkedő síksor többi tagját is). Továbbmenve, az egyenest úgy is felfoghatjuk, mint az összesrajta átmenő sík által kijelölt objektumot. Ez ugyan nagyon célszerűtlen felfogásnak tűnik,de bizonyos értelemben, amint majd látni fogjuk, egyenértékű azzal a felfogással, hogy azegyenest a pontjaival adjuk meg.
3.8. A vektorok struktúrája nagyon hasznos: könnyű bizonyos térelemes feladatokat elvégeznivelük. Hiba: nagyon ragaszkodnak a 3-dim euklideszi esethez: Általános egybevágóságokatmár körülményes leírni velük. Még általánosabb transzformációkat, pl. perspektivitásokat,már nagyon nehéz leírni velük. A szokásos vektorkalkulus nemigen idomul a nem derékszö-gű, vagy éppen görbevonalú koordinátarendszerekhez. Ehhez lineáris algebra és mátrixokkellenek.
13

4. Vektorok térelemes feladatokban (röviden)A b vektor a vektorral párhuzamos komponense:
proja b =ab
|a|2a.
A b vektor a vektorra merőleges komponense:
proj⊥a b = b− proja b = b− ab
|a|2a.
A b vektor a vektorra tükrözöttje:
refla b = proja b− proj⊥a b = 2proja b− b = 2ab
|a|2a− b.
A b vektor a vektor merőleges (síkjára) tükrözöttje:
refl⊥a b = − proja b+ proj⊥a b = − refla b = b− 2 proja b = b− 2
ab
|a|2a.
Az r1 pont n(r− r0) = 0 síkra levetítettje:
projn(r−r0)=0 r1 = r0 + proj⊥n (r1 − r0) = r1 − projn(r1 − r0) = r1 −n(r1 − r0)
|n|2n
Az r1 pont n(r− r0) = 0 síkra tükrözöttje:
refln(r−r0)=0 r1 = r1 − 2 projn(r1 − r0) = r1 − 2n(r1 − r0)
|n|2n
Az r1 pont r0 + vt egyenesre vetítettje:
projr0+vt r1 = r0 + projv(r1 − r0) = r1 − proj⊥v (r1 − r0) = r0 +v(r1 − r0)
|v|2v
Az r1 pont r0 + vt egyenesre tükrözöttje:
reflr0+vt r1 = r1 − 2 proj⊥v (r1 − r0) = 2r0 − r1 + 2v(r1 − r0)
|v|2v
Az r1 pont r0 pontra való centrális tükrözöttje:
centrr0 r1 = 2r0 − r1.
Kiegészítő információ: Az r0 + vt egyenes origóhoz legközelebbi pontja:
r0 −vr0|v|2
v =(v × r0)× v
|v|2
Kiegészítő információ: Az nr+ d = 0 egyenletű sík origóhoz legközelebbi pontja:
− d
|n|2n.
A b vektor a vektor körüli α szögű elforgatottja (pozitív irányba):
rota,α b = proja b+ cosα proj⊥a b+ sinαa
|a|× b.
14

5. Vektorok térelemes feladatokban (részletesebben)
Vektorok levetítése/tükrözése vektorokra:
A b vektor a vektorral párhuzamos komponense:
proja b =ab
|a|2a.
A b vektor a vektorra merőleges komponense:
proj⊥a b = b− proja b = b− ab
|a|2a.
A b vektor a vektorra tükrözöttje:
refla b = proja b− proj⊥a b = 2proja b− b = 2ab
|a|2a− b.
A b vektor a vektor merőleges (síkjára) tükrözöttje:
refl⊥a b = − proja b+ proj⊥a b = − refla b = b− 2 proja b = b− 2
ab
|a|2a.
Megjegyzés:
proja b =(ab)a
|a|2, proj⊥a b =
(a× b)× a
|a|2=
a× (b× a)
|a|2.
Vetítés/tükrözés síkra:
Az r1 pont n(r− r0) = 0 síkra levetítettje:
projn(r−r0)=0 r1 = r0 + proj⊥n (r1 − r0) = r1 − projn(r1 − r0) = r1 −n(r1 − r0)
|n|2n
projnr+d=0 r1 = r1 −nr1 + d
|n|2n
Az r1 pont n(r− r0) = 0 síkra tükrözöttje:
refln(r−r0)=0 r1 = r1 − 2 projn(r1 − r0) = r1 − 2n(r1 − r0)
|n|2n
reflnr+d=0 r1 = r1 − 2nr1 + d
|n|2n
Az r1 ponthoz az n(r− r0) = 0 síktól húzott merőleges vektor:
proj⊥n(r−r0)=0 r1 = projn(r1 − r0) =n(r1 − r0)
|n|2n
15

proj⊥nr+d=0 r1 =nr1 + d
|n|2n
Az r1 pontnak az n(r− r0) = 0 síktól mért távolsága:
| proj⊥n(r−r0)=0 r1| =|n(r1 − r0)|
|n|, | proj⊥nr+d=0 r1| =
|nr1 + d||n|
Kiegészítő információ: Az nr+ d = 0 egyenletű sík origóhoz legközelebbi pontja:
projnr+d=0 0 = − d
|n|2n.
Az r1 + v1t egyenes n(r− r0) = 0 síkra levetítettje:
projn(r−r0)=0 r1 +(proj⊥n v1
)t
Az r1 + v1t egyenes n(r− r0) = 0 síkra tükrözöttje:
refln(r−r0)=0 r1 +(refl⊥
n v1
)t
Az n(r− r0) = 0 sík n(r− r0) = 0 síkra tükrözöttje:(refl⊥
n n) (
r− refln(r−r0)=0 r0)= 0
Vetítés/tükrözés egyenesre:
Az r1 pont r0 + vt egyenesre vetítettje:
projr0+vt r1 = r0 + projv(r1 − r0) = r1 − proj⊥v (r1 − r0) = r0 +v(r1 − r0)
|v|2v
Az r1 pont r0 + vt egyenesre tükrözöttje:
reflr0+vt r1 = r1 − 2 proj⊥v (r1 − r0) = 2r0 − r1 + 2v(r1 − r0)
|v|2v
Az r1 ponthoz r0 + vt egyenestől húzott merőleges vektor:
proj⊥r0+vt r1 = proj⊥v (r1 − r0) = (r1 − r0)−v(r1 − r0)
|v|2v
Az r1 pont távolsága a r0 + vt egyenestől:
| proj⊥r0+vt r1| =∣∣∣∣(r1 − r0)−
v(r1 − r0)
|v|2v
∣∣∣∣ = |(r1 − r0)× v||v|
Kiegészítő információ: Az r0 + vt egyenes origóhoz legközelebbi pontja:
projr1+v1t 0 = r0 −r0v
|v|2v.
Az r2 + v2t egyenes r0 + vt egyenesre tükrözöttje:
reflr0+vt r2 + (reflv v2) t
Az n(r− r0) = 0 sík r0 + vt egyenesre tükrözöttje:
(reflv n)(r− reflr0+vt r0
)= 0
16

Tükrözés pontra:
Az r1 pont r0 pontra való centrális tükrözöttje:
centrr0 r1 = 2r0 − r1.
Az r2 + v2t egyenes r0 pontra tükrözöttje:
centrr0 r2 − v2t
Az n(r− r0) = 0 sík r0 + vt egyenesre tükrözöttje:
−n(r− centrr0 r0
)= 0
Metszetek:
A nem párhuzamos r2 + v2t egyenes és a n(r− r0) = 0 sík metszéspontja (nv2 = 0):
r2 −n(r2 − r0)
nv2
v2
Az n1(r − r1) = 0 és n2(r − r2) = 0 nem párhuzamos síkok (n1 ∦ n2) metszésvonalának egylehetséges paraméterezése:(
n2 × (n1 × n2)
|n1 × n2|2(n1r1) +
n1 × (n2 × n1)
|n1 × n2|2(n2r2)
)+ n1 × n2t.
Nem párhuzamos egyenesek:
Ha r1 + v1t és r2 + v2t nem párhuzamos egyenesek (v1 ∦ v2) akkor:Az r1 + v1t egyenestől a r2 + v2t egyenesig húzott normáltranszverzális vektor:
projv1×v2(r2 − r1) =
(r2 − r1)(v1 × v2)
|v1 × v2|2v1 × v2
Az r1 + v1t és r2 + v2t egyenesek távolsága:
| projv1×v2(r2 − r1)| =
|(r2 − r1)(v1 × v2)||v1 × v2|
A normáltranszverzális egyenes talppontja az r1 + v1t egyenesen:
r1 +(r2 − r1)(v2 × (v1 × v2))
|v1 × v2|2v1 = r1 +
(r2 − r1)(|v2|2v1 − (v1v2)v2)
|v1|2 |v2|2 − (v1v2)2v1
A normáltranszverzális egyenes egy paraméterése:(r1 +
(r2 − r1)(v2 × (v1 × v2))
|v1 × v2|2v1
)+
(r2 − r1)(v1 × v2)
|v1 × v2|2v1 × v2t
17

Forgatás vektorok körül
A b vektor a vektor körüli α szögű elforgatottja (pozitív irányba):
rota,α b = proja b+ cosα proj⊥a b+ sinαa
|a|× proj⊥a b =
= proja b+ cosα proj⊥a b+ sinαa
|a|× b
A b vektornak a vektorra vonatkozó α szögű forgatva tükrözöttje (pozitív irányba):
rot⊥a,α b = − proja b+ cosα proj⊥a b+ sinαa
|a|× proj⊥a b =
= − proja b+ cosα proj⊥a b+ sinαa
|a|× b
18

6. Emlékeztető: Lineáris algebra, mátrixok
Bázis, duális bázis
• Volt: vektortér, lináris leképezés fogalma. Tipikus vektortér: Rn. Legyen A : Rn → Rm
egy lineáris leképezés. Ez egy m× n-es A mátrix-szal írható le:
vA7→ Av.
Itt v egy n-es oszlopvektor, Av egym-es oszlopvektor. A kompozíciónak a mátrixszorzásfelel meg.
vA7→ Av
B7→ B(Av) = (BA)v.
Azt hihetjük, hogy R2 és R3 elég nekünk, de nem.
• Más vektortereken ható lineáris leképezések is reprezentálhatóak mátrixokkal, ezt bázi-sok választásával lehet megvalósítani. Ezt később még részletesebben átismételjük.
• V vektortér. Ekkor egy f : V → R lineáris leképezést funkcionálnak nevezünk. Ezek tereV ∗, az ún. duális vektortér. Példa: tegyük fel, hogy b1, . . . ,bn egy bázis. Általánosanírjuk, de nekünk csak n = 2, 3, 4 fontos. Általában egy v ∈ V vektorra
v = c1b1 + . . .+ cnbn
valamilyen c1, . . . , cn-vel. Na de konkrétan?
v = β1(v)b1 + . . .+ βn(v)bn,
ahol a βi : V → R függvények a együttható- (koordináta-) felbontást szolgáltató lineárisfuncionálok. A β1, . . . , βn neve: a b1, . . . ,bn duális bázisa.
• Példa:b1 = i, b2 = j, b3 = k;
ekkorβ1 = x, β2 = y, β3 = z;
általábanp = x(p)i+ y(p)j+ z(p)k.
Többnyire nem mint függvény szoktak gondolni x, y, z-re, hanem konkrét számokként,de ezt mindig csak egy pontra gondolva. Ha egyszerre az összes pontra tekintjük ezeketaz értékeket, akkor x, y, z függvényeket adnak meg.
Általában az e1, . . . , en bázis jelölés is jellemző Rn-re; és ekkor x1, . . . , xn koordináta-függvények alkotják a duális (Rn)∗ bázist
•b1 = 1 · b1 + 0 · b1 + . . . 0 · bn,
ígyβ1(b1) = 1, β1(b2) = 0, . . . β1(bn) = 0;
hasonlóan a többi βi-re.
19

• b1, . . . ,bn egy bázis és β1, . . . βn duális bázis. Utóbbira a bázis név indokolt, hiszenfüggetlenek és kifeszítik a duális teret.
• Bázis és duális bázisa kölcsönösen meghatározzák meghatározzák egymást.
6.1. Ha a szemléletesB =
[b1 · · · bn
]B−1 =
β1...βn
jelöléseket alkalmazzuk, akkor látható, hogy
(B−1)B = I (egységmátrix),
abban az értelemben, hogy βi(bj) = δij; és
B(B−1) = Id a V → V identitásleképezés,
abban az értelemben, hogy minden v vektorra∑n
i=1 biβi(v) = v.Vagyis a bázis és a duáalis bázis tényleg inverzei egymásnak valamilyen értelemben.
6.2. Alapvető: Ha van egy b1, . . . ,bn bázis, akkor általános vektorokat leírhatunk számn-esekkel:
v = c1b1 + . . .+ cnbn ↔ vB =
c1...cn
.Ekkor
v = BvB ↔ vB = B−1v.
Megállapíthatjuk, hogy a v vektor leírására a
vB = B−1v
oszlopmátrix alkalmazható. Ez egy kapcsolatot létesít:
v ∈ V
B−1
B−1v = vB ∈ Rn
B
VV
Bázistranszformációk, koordinátatranszformációk
6.3. Az ember naivan úgy gondolja, hogy ahogy változtatjuk a bázist, pont úgy változnak akoordináták. Ez azonban nem annyira egyszerű.
Példa:v = x1(v)e1 + x2(v)e2
20

Tegyük fel, hogye′1 = 2e1,
e′2 = e1 + e2.
Röviden, [e′1 e′2
]=[e1 e2
] [2 10 1
].
IttF =
[2 10 1
]a bázisáttérés mátrixa.
Kíváncsiak vagyunk, hogyan transzformálódnak a koordinátafüggvények (azaz a duálisbázis). Visszafelé kifejezve
e1 =1
2e′1,
e2 = e′2 −1
2e′1.
Így
v = x1(v)e1 + x2(v)e2 = x1(v)(1
2e′1) + x2(v)(e
′2 −
1
2e′1)
=
(1
2x1(v)−
1
2x2(v)
)e′1 + y(v)e′2 = x′1(v)e
′1 + x′2(v)e
′2;
azazx1 =
1
2x1 −
1
2x2,
x′2 = x2.
Röviden, [x′1 x′2
]=[x1 x2
] [ 1/2 0−1/2 1
].
Mi ez a mátrix? TalánF =
[2 10 1
]?
Nem. TalánF−1 =
[12
−12
0 1
]?
Nem. TalánF⊤ =
[2 01 1
]?
Nem. HanemF⊤,−1 = F−1,⊤ =
[1/2 0−1/2 1
].
21

Jelen esetben ez jön ki. De általában is, hiszen mindig csak át kell térni az inverzre, ésmegfelelően rakni az indexeket. Persze a másik két mátrixnak is van szerepe: F−1:[
x′1x′2
]=
[12
−12
0 1
] [x1x2
],
illetve F⊤: [e′1e′2
]=
[2 01 1
] [e1e2
].
6.4. Tétel. (Bázisok és koordináták transzformációja)
a sorba rendezett bázis a F mátrix-szal transzformálódik (jobbszorzással)
⇔
az oszlopba rendezett bázis a F⊤ mátrix-szal transzformálódik (balszorzással)
⇔
az oszlopba rendezett duális bázis a F−1 mátrix-szal transzformálódik (balszorzással)
⇔
a sorba rendezett duális bázis a F−1,⊤ mátrix-szal transzformálódik (jobbszorzással).
Bizonyítás. Tegyük fel, hogyv = BC,
aholB =
[e1 · · · en
]a bázis sormátrixa és
C =
x1...xn
az együtthatók oszlopmátrixa. Ekkor, ha B′ = BF, akkor
v = BC = BF︸︷︷︸B′
F−1C︸ ︷︷ ︸C′
Vagyis, ha a v vektor a B bázis vonatkozásában a C együtthatókkal áll elő, akkor a B′ = BFbázis vonatkozásában a C′ = F−1C együtthatókkal áll elő.
Ha bázisokat/együtthatókat inkább oszlop/sor alakba akarjuk írni, akkor persze transzpo-náltakat kell venni.
6.5. Megjegyzés. (Nem kell vizsgára.) Látható hogy:— a sormennyiségek az oszlopmennyiségekhez képest (és viszont) kontravariánsan transz-
formálódnak;— a sormennységek a sormennyiségekhez képest, illetve— az oszlopmennyiségek az oszlopmennyiségekhez képest kovariánsan transzformálódnak.
22

6.6. Megjegyzés. Egy nevezetes példa azonban az, amikor F egy ortogonális mátrix (lásdkésőbb). Ilyenkor F = F−1,⊤, úgyhogy sorba/oszlopba rendezett bázis ugyanúgy transzfor-málódik, mint a sorba/oszlopba rendezett duális bázis.
6.7. Tanulság: A legcélszerűbb a báziselemeket sorba rendezni, és a koordináta (duális bázis)elemeket oszlop alakba rendezni. Ekkor F ill. F−1 a bázis ill. koordinátatranszformációmátrixa.
6.8. (Nem kell vizsgára.) A fent szereplő F,F⊤,F−1,F−1,⊤ mátrixok közül mindegyikre illika bázis- vagy koordináta-transzformáció mátrix név, mert ha nem soron, akkor oszlopon,ha nem oda, akkor vissza transzformál. Mégis legcélszerűbben, F-et a bázistranszformációmátrixnak, F−1-et a koordinátatranszformáció mátrixnak hívjuk.
6.9. Lehet még a szemléletesB =
[b1 · · · bn
]B⊤ =
b1...bn
B−1 =
β1...βn
B−1,⊤ =
[β1 · · · βn
]jelöléseket alkalmazni.
Ekkor a tételünk a
B′ = BF ⇔ B′⊤ = F⊤B⊤ ⇔ B′−1 = F−1B−1 ⇔ B′−1,⊤ = B−1,⊤F−1,⊤
szemléletes állításnak felel meg.
6.10. Megjegyzés. (Nem kell vizsgára.) A B,B⊤,B−1,B−1,⊤ elemeknek lineáris algebraiértelmet is tulajdoníthatunk:
B : Rn → V, ei 7→ bi;
B⊤ : V ∗ → (Rn)∗, βi 7→ xi;
B−1 : V → Rn, bi 7→ ei;
B−1,⊤ : (Rn)∗ → V ∗, xi 7→ βi.
6.11. Megjegyzés. (Nem kell vizsgára.) Ha A : V1 → V2 lineáris leképezés, akkor van egytranszponált (vagy inkább adjungált, de ezt a nevet sajnos másra is alkalmazzák) leképezés
A : V ∗2 → V ∗
1 ,
ami azt csinálja, hogy az f : V2 → R funcionálhoz az f A : V1 → R funkcionált rendeli.
23

6.12. Megjegyzés. (Nem kell vizsgára.) A V ∗ duális téren is lehet lineáris függvényeketértelmezni: Ha pl. v ∈ V , akkor legyen v⊤ az az operáció, amelyik egy f : V → R lineárisfüggvényhez hozzárendeli f(v)-t. Ekkor v⊤ ∈ (V ∗)∗. Sőt, dimenziós okok miatt ezek a v⊤
vektorok kimerítik (V ∗)∗-t. Ez a megfeleltetés több okból is nagyon természetes, és így aztszokták mondani, hogy V és (V ∗)∗ kanonikusan, vagy természetesen izomorf.
6.13. Alapvető: Ha a B bázisról a B′ bázisra térünk át az F bázisáttérési mátrixszal, azazB′ = BF, amiből formálisan F−1 = B′−1B, akkor (vB ≡ B−1v-vel és vB′ ≡ B′−1v-velösszhangban) formálisan
vB′ = F−1vB
adódik. Summa summarum: A koordináták úgy transzformálódnak, ahogy azt a koordiná-tatranszformáció mátrix mutatja.
Lineáris leképezések leírása
6.14. Legyen A : V1 → V2 egy lineáris leképezés. Itt lehet hogy V1 a tér, V2 egy sík, stb. HaB1 ill. B2 bázisokat választunk, akkor
V1
B−11
A // V2
B−12
Rn
B1
UU
A// Rm
B2
UU
figyelembevételével az A lineáris leképezést az
A =
a11 · · · a1n... . . . ...am1 · · · amn
mátrix írja le, ahol
Ab1k =m∑i=1
aikb2i.
Formálisan, azt is mondhatjuk, hogy
AB1 = B2A
ígyA = B−1
2 AB1.
Ha B′1 és B′
2 másik bázisokat veszünk, akkor ezekhez F1,F2 bázistranszformációs mátrixoktartoznak (B′
1 = B1F, B′1 = B1F). Ekkor az új bázisokkal a lineáris leképezés mátrixa
A′ = F−12 AF1.
6.15. Nagyon gyakori helyzet, hogy az A : V → V lineáris leképezés kezdő és végtére ugyanaz,és itt ugyanaz a B bázis. Ha a B′ bázisra térünk át, F bázisáttérési mátrix, illetve F−1
koordinátaáttérési mátrix; ekkorA′ = F−1AF
az áttérés. (De ez nem kizárólagos helyzet.)
24

6.16. A fenti mátrixáttérés azért fontos, mert azt is mutatja, hogy a determináns
detA = detA
ill. a nyomtrA = trA
jóldefiniált a bázisválasztástól függetlenül. Felteszem, hogy ezek, illetve a kapcsolódó fogalmak(karakterisztikus polinom, stb.) tulajdonágai jól ismertek.
6.17. (Nem kell vizsgára.) Ha egy leképezés a B bázist a B′ bázisba visz át, akkor ennek mia mátrixa a B bázisban?
1.) Formális megoldás:B−1(B′B−1)B = B−1B′ = F.
2.) Bázisáttéréses megoldás: A leképezés mátrixa I a B bázisból a B′ bázisba. Ha ittmost a képtartományban váltás van vissza a B bázisra, akkor a mátrix (F−1)−1I = F lesz.
3.) Triviális megoldás: F, hiszen ez fejezi ki, hogy egy új báziselemet hogyan tudunkkifejezni a régiekkel.
25

7. Emlékeztető: Bilineáris formák
Skaláris szorzat, kvadratikus alak
7.1. Egy V vektortér „alakját” a benne lévő
v,w 7→ L(v,w)
skaláris szorzat határozza meg: L tipikusan jó tulajdonságai:
• bilineáris
• szimmetrikus
• pozitív definit
Nem csak pozitív definiteket tekinthetünk de, azok nagyon gyakoriak. Ha csak az első kétfeltétel teljesül, akkor csak szimmetrikus bilineáris formáról van szó.
Formálisan úgy is lehet írni L(v,w)-t, hogy
w⊤Lv
habár ennek semmi értelme se látszik most.
7.2. A szokásos példa: Rn-ben:
v,w 7→ ⟨v,w⟩ = w⊤v.
Ennek itt most 1. van értelme, 2. tényleg a szokásos skaláris szorzatot adja.Más szimmetrikus bilineáris forma Rn-en:
w⊤Lu,
ahol L szimmetrikus. Az előbb L = I, az identásmátrix volt. Ha az L pozitív definit ska-lárszorzatot ad, akkor azt modjuk, hogy L pozitív. (A pozitív mátrixok úgy ismerhetők fel,hogy az összes főminor mátrix determinánsa pozitív.)
7.3. Általánosan, egy vektortéren minden szimmetrikus bilineáris formát így képzelhetünk el,ha van bázis választva:
V
B−1
oo L // V
B−1
Rn
B
VV
ooL
// Rn
B
VV
A fentiek figyelembevételével az L bilineáris formát az
L =
l11 · · · l1n... . . . ...ln1 · · · lnn
26

szimmetrikus mátrix írja le, aholL(bs,bk) = lk,s.
Ilyenkor
L
(∑s
csbs, ckbk
)=
n∑s,k=1
cklk,scs,
azazL(v,w) = w⊤
BLvB,
avagyL(v,w) = (B−1w)⊤L(B−1v) = w⊤B−1,⊤LB−1v.
FormálisanB⊤LB = L.
Ha B′ = BF a bázisáttérés, akkor
L′ = B′⊤LB′ = F⊤LF.
Ortogonális mátrixok
7.4. Szokásosan olyan bázisokat választunk, hogy L = I legyen, azaz
lks = δks.
Ezeknek neve: ortonormált bázis. Van, ahol másfajta szimmetrikus mátrixot használnak, ezmindig az adott tér vagy síkrész „alakjával” van kapcsolatban. De erről majd később.
Mi olyan leképzéseket keresünk, amelyek fixen hagyják a tér „alakját”:
L(v,w) = L(Av, Aw),
avagyw⊤
BLvB = w⊤BA
⊤LAvB,
minden v,w vektorra, azazL = A⊤LA.
Minket itt most csak az L = I érdekel, amikor is
I = A⊤A
avagyA⊤ = A−1.
Az ilyen mátrixokat ortogonális mátrixnak nevezik. (Persze „ortonormált” szó mégjobb lenne,hiszen a nemnulla konstansszor ortogonális mátrixok szintén mindig ortogonálisak mindenortogonális bázisban.) Az ortogonális mátrixok csoportok alkotnak: O(n), az n-dimenziósortogonális csoport. Ezek az origót fixen tartó egybevágóságok, mert megtartják a tér alakját.Ismert, hogy ilyenkor detA = ±1. Az 1 determinánsú elemek részcsoportja SO(n), az n-dimenzós speciális ortogonális csoport, az O origót fixen hagyó mozgások csoportja.
27

7.5. Példák: n = 2:
• [cosα − sinαsinα cosα
],
az origó körüli α szögű forgatás.
• [cosα sinαsinα − cosα
],
az origón átmenő ±⟨cos α2, sin α
2⟩ irányú egyenesre való tükrözés.
Meg lehet mutatni, hogy ezek kiadják az összes síkbeli ortogonális transzformációt.
7.6. Példák: n = 3:
• cosα − sinαsinα cosα
1
,α-s forgatás k körül.
• −11
1
,tükrözés az yz síkra.
• −1−1
−1
,az origóra való tükrözés mátrixa.
• 11
1
,forgatás i+ j+ k körül 120-kal.
Később látni fogjuk, hogy hogyan lehet a térbeli ortogonális transzformációt leírni.
28
8. A Gram-Schmidt-ortogonalizáció8.1. (A klasszikus eset.) Tegyük fel, hogy a V vektortérben van egy ⟨x,y⟩ pozitív definitskaláris szorzat. Tegyük fel, hogy v1, . . . ,vn egy bázis, de nem feltétlenül ortonormált vagyéppen ortogonális, de mi olyat szeretnénk.
8.2. (GS I.: Csak ortogalizáció.) Ha ortogonálissá akarjuk tenni a bázist, akkor úgyjárhatunk el, hogy legyen v1 = v1, azután pedig induktívan legyen vi+1 a vi+1 vektornakaz v1, . . . ,vi altérre merőleges komponense az v1, . . . ,vi+1 altérben. Ez az eljárás egy-értelműen kijelöli az ortogonális bázist. Ez a Gram-Schmidt ortogonalizáció (a klasszikusesetben).
Mivelvi+1 = vi+1 − k1,i+1v1 − . . .− ki,i+1vi
alakú, és ebből is látszik , hogy v1, . . . ,vj = v1, . . . , vj ezért
vi+1 = vi+1 − k1,i+1v1 − . . .− ki,i+1vi.
Ezekre a konstansokra viszont könnyen következtethetünk:
vi+1 = vi+1 −⟨vi+1, v1⟩⟨v1, v1⟩
v1 − . . .− ⟨vi+1, vi⟩⟨vi, vi⟩
vi.
Ez egy praktikus induktív módszert is ad az ortogonalizációra.
8.3. Megjegyzés. A Gram-Schmidt ortogonalizáció leírása a következő megfigyelés alapjánis lehetséges. Észrevehető, hogy a
v1,
∣∣∣∣⟨v1,v1⟩ ⟨v1,v2⟩v1 v2
∣∣∣∣ , . . . ,∣∣∣∣∣∣∣∣∣⟨v1,v1⟩ ⟨v1,v2⟩ . . . ⟨v1,vn⟩
...... . . . ...
⟨vn−1,v1⟩ ⟨vn−1,v2⟩ . . . ⟨vn−1,vn⟩v1 v2 . . . vn
∣∣∣∣∣∣∣∣∣vektorsorozat konstans szorzóktól eltekintve kielégíti a Gram-Schmidt ortogonalizáció követel-ményét. Ha a konstans szorzókat jól állítjuk be akkor az egyértelműség miatt a Gram-Schmidtortogonalizáltakat kapjuk:
v1 = v1, v2 =
∣∣∣∣⟨v1,v1⟩ ⟨v1,v2⟩v1 v2
∣∣∣∣⟨v1,v1⟩
, v2 =
∣∣∣∣∣∣⟨v1,v1⟩ ⟨v1,v2⟩ ⟨v1,v3⟩⟨v2,v1⟩ ⟨v2,v2⟩ ⟨v2,v3⟩
v1 v2 v3
∣∣∣∣∣∣∣∣∣∣⟨v1,v1⟩ ⟨v1,v2⟩⟨v2,v1⟩ ⟨v2,v1⟩
∣∣∣∣ , . . .
vn =
∣∣∣∣∣∣∣∣∣⟨v1,v1⟩ ⟨v1,v2⟩ . . . ⟨v1,vn⟩
...... . . . ...
⟨vn−1,v1⟩ ⟨vn−1,v2⟩ . . . ⟨vn−1,vn⟩v1 v2 . . . vn
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣⟨v1,v1⟩ . . . ⟨v1,vn−1⟩
... . . . ...⟨vn−1,v1⟩ . . . ⟨vn−1,vn−1⟩
∣∣∣∣∣∣∣.
29
8.4. (GS II.: Ortonormalizáció.) Ha ortonormált bázist akarunk, akkor egységvektoro-kat kell venni: A legegyszerűbb, legpraktikusabb választás, az az, ha először elvégezzük azortogonalizációt, és csak azután normálunk:
vj =vj|vj|
.
Az egységvektorra hozás be is építhető a rekurzív folyamatba:
vk+1 =vk+1 − ⟨vk+1, v1⟩v1 − . . .− ⟨vk+1, vk⟩vk|vk+1 − ⟨vk+1, v1⟩v1 − . . .− ⟨vk+1, vk⟩vk|
.
De ez nem annyira praktikus, mert nem szeretünk négyzetgyököket egyszerűsítgetni.
8.5. Megjegyzés. A direkt formulák is használhatóak, de azok sem annyira praktikusak:
v1 =v1√
⟨v1,v1⟩,
v2 =
∣∣∣∣⟨v1,v1⟩ ⟨v1,v2⟩v1 v2
∣∣∣∣√⟨v1,v1⟩
∣∣∣∣⟨v1,v1⟩ ⟨v1,v2⟩⟨v2,v1⟩ ⟨v2,v1⟩
∣∣∣∣,
v3 =
∣∣∣∣∣∣⟨v1,v1⟩ ⟨v1,v2⟩ ⟨v1,v3⟩⟨v2,v1⟩ ⟨v2,v2⟩ ⟨v2,v3⟩
v1 v2 v3
∣∣∣∣∣∣√√√√√∣∣∣∣⟨v1,v1⟩ ⟨v1,v2⟩⟨v2,v1⟩ ⟨v2,v1⟩
∣∣∣∣∣∣∣∣∣∣⟨v1,v1⟩ ⟨v1,v2⟩ ⟨v1,v3⟩⟨v2,v1⟩ ⟨v2,v2⟩ ⟨v2,v3⟩⟨v3,v1⟩ ⟨v3,v2⟩ ⟨v3,v3⟩
∣∣∣∣∣∣, . . .
vn =
∣∣∣∣∣∣∣∣∣⟨v1,v1⟩ ⟨v1,v2⟩ . . . ⟨v1,vn⟩
...... . . . ...
⟨vn−1,v1⟩ ⟨vn−1,v2⟩ . . . ⟨vn−1,vn⟩v1 v2 . . . vn
∣∣∣∣∣∣∣∣∣√√√√√√√√∣∣∣∣∣∣∣⟨v1,v1⟩ . . . ⟨v1,vn−1⟩
... . . . ...⟨vn−1,v1⟩ . . . ⟨vn−1,vn−1⟩
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣⟨v1,v1⟩ ⟨v1,v2⟩ . . . ⟨v1,vn⟩
...... . . . ...
⟨vn−1,v1⟩ ⟨vn−1,v2⟩ . . . ⟨vn−1,vn⟩⟨vn,v1⟩ ⟨vn,v2⟩ . . . ⟨vn,vn⟩
∣∣∣∣∣∣∣∣∣8.6. Megjegyzés. A skalárszorzatos jelölés alkalmas kiterjesztésével a korábbi formulák úgyírhatóak, hogy
vk+1 =⟨v1 ∧ . . . ∧ vk,v1 ∧ . . . ∧ vk+1⟩⟨v1 ∧ . . . ∧ vk,v1 ∧ . . . ∧ vk⟩
,
vk+1 =⟨v1 ∧ . . . ∧ vk,v1 ∧ . . . ∧ vk+1⟩√
⟨v1 ∧ . . . ∧ vk,v1 ∧ . . . ∧ vk⟩⟨v1 ∧ . . . ∧ vk+1,v1 ∧ . . . ∧ vk+1⟩
30

8.7. Megjegyzés. Amikor végrehajtjuk az ortogonalizációt, akkor az eredeti
v1, . . . ,vn−1,
az ortogonalizáltv1, . . . , vn−1,
és az ortonormalizáltv1, . . . , vn−1
bázisok ugyanazt az irányítást határozzák meg.
8.8. (GS III.: Irányításos ortonormalizáció.) A Gram-Schmidt ortogonalizáció egymásik változata úgy megy, hogy csak n − 1 kiinduló vektorunk van, v1, . . . ,vn−1, de a térenvan egy előre rögzített K irányítás. Ekkor az első n−1 vektorra az ortogonalizáció a szokásosmódon megy, de egy utolsó v′
n vektort hozzávehetünk azzal az előírással, hogy
• v′n merőleges legyen a v1, . . . , vn−1 altérre,
• v1, . . . , vn−1, v′n a K irányítást határozza meg, és
• v′n egységhosszú legyen.
8.9. A fenti vektor előállítható a következő megfigyelés alapján: Ha v1, . . . ,vn−1 függetlenvektorok, és k1, . . . ,kn egy bázis, akkor a
v′n = ⟨v1 ∧ . . . ∧ vn−1,k1 ∧ . . . ∧ kn⟩ =
∣∣∣∣∣∣∣∣∣⟨v1,k1⟩ ⟨v1,k2⟩ . . . ⟨v1,kn⟩
...... . . . ...
⟨vn−1,k1⟩ ⟨vn−1,k2⟩ . . . ⟨vn−1,kn⟩k1 k2 . . . kn
∣∣∣∣∣∣∣∣∣vektorra igaz, hogy
• v1, . . . ,vn−1, v′n illetve v1, . . . , vn−1, v
′n bázisok,
• ugyazt az irányítást határozzák meg, mint k1, . . . ,kn−1,kn;
• v′n merőleges a v1, . . . ,vn−1 = v1, . . . , vn−1 altérre.
Ez alapján
v′n =
v′n
|v′n|.
8.10. Abban az esetben, ha az e1, . . . , en szokásos ortonormált bázissal megegyező irányításúbázist keresünk, akkor a
v′n =
∣∣∣∣∣∣∣∣∣⟨v1, e1⟩ ⟨v1, e2⟩ . . . ⟨v1, en⟩
...... . . . ...
⟨vn−1, e1⟩ ⟨vn−1, e2⟩ . . . ⟨vn−1, en⟩e1 e2 . . . en
∣∣∣∣∣∣∣∣∣ =∣∣∣∣∣∣∣∣∣v1,1 v1,2 . . . v1,n...
... . . . ...vn−1,1 vn−1,2 . . . vn−1,n
e1 e2 . . . en
∣∣∣∣∣∣∣∣∣31

v′n =
v′n
|v′n|.
képletek alapján számolható az utolsó vektor.Megjegyzés: Ilyenkor az általánosított vektoriális szorzat jelölésével élve:
v′n = E(v1, . . . ,vn−1) = E(v1, . . . , vn−1)
ésv′n = E(v1, . . . , vn−1).
8.11. Az n = 2 esetben ez úgy néz ki, hogy a v1 = ⟨x, y⟩ vektorhoz
v′2 = (v2)
= ⟨−y, x⟩.
(Azaz itt a pozitív irányba való 90-os elforgatást jelöli.)Ez alapján az ortonormált bázis
v1 =1√
x2 + y2⟨x, y⟩, v′
2 =1√
x2 + y2⟨−y, x⟩.
8.12. Az n = 3 esetben a v1,v2 vektorokhoz
v′3 = v1 × v2.
Ez alapján az ortonormált bázis
v1 =v1
|v1|, v2 =
⟨v1,v1⟩v2 − ⟨v1,v2⟩v1
|v1| |v1 × v2|, v′
3 =v1 × v2
|v1 × v2|.
A legbonyolultabb a második vektor, amire úgy is gondolhatunk, hogy
v2 =proj⊥v1
v2
| proj⊥v1v2|
=
v2 −⟨v1,v2⟩⟨v1,v1⟩
v1
|v1 × v2||v1|
=⟨v1,v1⟩v2 − ⟨v1,v2⟩v1
|v1| |v1 × v2|.
Igazából av2 = v′
3 × v1
is használható. (Ez közvetlen számolással is látható, de onnan is lehet tudni, hogy egy orton-ormált jól irányított v1, v2, v
′3 bázisban a v1 × v2 = v′
3, v2 × v′3 = v1, v′
3 × v1 = v2 formulákteljesülnek.)
Ez utóbbi esetben a számolási stratégiánk: v1 =v1
|v1|, v′
3 =v1 × v2
|v1 × v2|, v2 = v′
3 × v1.
8.13. A Gram-Schmidt ortogonalizáció rekurzív elve alkalmazható akkor is, ha a bilineárisforma indefinit szimmetrikus, vagy éppen antiszimmetrikus. Ilyenkor azonban néha vektor-cserére, vagy speciális kombinációkra van szükség, mert különben az izotróp vektorok (azL(v,v) = 0 alakú vektorok) problémát jelenthetnek.
32

9. Mátrixok inverze9.1. Egy A négyzetes mátrix előjeles aldetermináns- (kofaktor-) mátrixa:
cof A =
A11 A12 · · · A1n
A21 A22 · · · A2n...
... . . . ...An1 An2 · · · Ann
,ahol
Aij = (−1)i+j detA|i-edik sor törölve, j-edik oszlop törölve .
A fenti mátrix transzponáltja az A négyzetes mátrix adjungált mátrixa:
adjA =
A11 A21 · · · An1A12 A22 · · · An2...
... . . . ...A1n A2n · · · Ann
.Tehát
adjA = (cof A)⊤, cof A = (adjA)⊤.
Belátható, hogyA(adjA) = (adjA)A = (detA)I;
ami lényegében a kifejtési tétellel ekvivalens.
9.2. Mátrix inverze elméletileg számítható az adjungáltból:
A−1 =adjA
detA.
A 2× 2 esetben a mátrixinverz könnyű:[a bc d
]−1
=1
ad− bc
[d −b−c a
].
A 3× 3 eset még éppenhogy számolható:a11 a12 a13a21 a22 a23a31 a32 a33
−1
=1
D
a22a33 − a23a32 a32a13 − a33a12 a12a23 − a13a22a23a31 − a21a33 a33a11 − a31a13 a13a21 − a11a23a21a32 − a22a31 a31a12 − a32a11 a11a22 − a12a21
ahol
D = a11a22a33 + a12a23a31 + a13a21a32 − a11a23a32 − a22a31a13 − a33a12a21.
Nagyobb mátrixokra a direkt formulák már gyakorlatilag használhatatlanok.
33

9.3. A 3× 3-as esetben még érdekes analizálni a fenti formulát:Ha az A mátrix sorait a1, a2, a3-mel jelöljük, akkor azt látjuk, hogy
A−1 =
a1
a2
a3
−1
=1
a1a2a3
a2 × a3 a3 × a1 a1 × a2
;
ami azt is mutatja, hogy a determináns és az adjungált hogyan fejezhető ki a standard vek-torműveletekkel.
Ha az A mátrix oszlopai jeljük a1, a2, a3-mel, akkor azt látjuk, hogy
A−1 =
a1 a2 a3
−1
=1
a1a2a3
a2 × a3
a3 × a1
a1 × a2
;
hasonlóan.
34

10. Komplex számok négyzetgyökvonása10.1. A ⟨cos 2α, sin 2α⟩ párból a ⟨cosα, sinα⟩ pár komplex négyzetgyökvonással határozhatómeg:
cosα + i sinα = ±√cos 2α + i sin 2α.
A komplex négyzetgyökvonásra kétféle fő megközelítés van:
10.2. („Pozitív valós részű négyzetgyök".)Ha z = x+ iy olyan, hogy z ≤ 0 valós, azaz x ≤ 0 és y = 0, akkor
√z = i
√|x|;
egyébként pedig
√z =
(√x2 + y2 + x) + iy
√2√√
x2 + y2 + x=
√√x2 + y2 + x
2+ i(sgn y)
√√x2 + y2 − x
2.
A két eset egybefoglalható a
√z =
√√x2 + y2 + x
2+ i(sgn y)
√√x2 + y2 − x
2.
formulával, ahol sgn az előjelfüggvénynek az a módosítása, amelyik 0-ra 1-et ad.Ennek a négyzetgyöknek megvan az a tulajdonsága, hogy
Re√z ≥ 0.
(Egészen pontosan, ez a négyzetgyök a közönséges négyzetgyöknek az a kiterjesztése, amelyikfolytonos a λ− iϵ (λ < 0) félegyenes mentén felvágott komplex síkon.)
10.3. („Pozitív képzetes részű négyzetgyök".)Ha z = x+ iy olyan, hogy z ≥ 0 valós, azaz x ≥ 0 és y = 0, akkor
√z =
√|x|;
egyébként pedig
√z =
y + i(√x2 + y2 − x)
√2√√
x2 + y2 − x= (sgn y)
√√x2 + y2 + x
2+ i
√√x2 + y2 − x
2.
A két eset egybefoglalható a
√z = (sgn y)
√√x2 + y2 + x
2+ i
√√x2 + y2 − x
2.
formulával, ahol sgn az előjelfüggvénynek az a módosítása, amelyik 0-ra 1-et ad.Ennek a négyzetgyöknek megvan az a tulajdonsága, hogy
Im√z ≥ 0.
(Egészen pontosan, ez a négyzetgyök a közönséges négyzetgyöknek az a kiterjesztése, amelyikfolytonos a λ− iϵ (λ > 0) félegyenes mentén felvágott komplex síkon.)
10.4. A kétféle négyzetgyök egymás sgn y-szorosa.
35

11. 2× 2-es szimmetrikus mátrixok
A 2× 2-es szimmetrikus mátrixok diagonalizációja
11.1. Tekintsük a [a11 a12a12 a22
]szimmetrikus mátrixot. Ezt akarjuk diagonalizálni. A számolásnál használjuk a
δ = a11 + a22
és aΓ =
√(a11 − a22)2 + 4a212
segédmennyiségeket.
11.2. Ha Γ = 0, akkor a mátrix már nemcsak diagonális, hanem az identitás konstansszorosa.
11.3. Tegyük fel, hogy Γ =√(a11 − a22)2 − 4a212 > 0. Ekkor ekvivalensek:
a.) [cosα sinα− sinα cosα
] [a11 a12a12 a22
] [cosα − sinαsinα cosα
]=
δ − Γ
2δ + Γ
2
;
b.) [cosα − sinαsinα cosα
]δ − Γ
2δ + Γ
2
[ cosα sinα− sinα cosα
]=
[a11 a12a12 a22
];
c.)
⟨cos 2α, sin 2α⟩ =⟨−a11 − a22
Γ,−2a12
Γ
⟩;
d.)
⟨cosα, sinα⟩ = ±
⟨√1
2
(1− a11 − a22
Γ
),−(sgn a12)
√1
2
(1 +
a11 − a22Γ
)⟩,
ahol sgn az előjelfüggvénynek az a módosítása, amelyik 0-ra 1-et ad.
11.4. Tegyük fel, hogy Γ =√(a11 − a22)2 − 4a212 > 0. Ekkor ekvivalensek:
a.) [cosα sinα− sinα cosα
] [a11 a12a12 a22
] [cosα − sinαsinα cosα
]=
δ + Γ
2δ − Γ
2
;
b.) [a11 a12a12 a22
]δ + Γ
2δ − Γ
2
[ cosα sinα− sinα cosα
]=
[cosα − sinαsinα cosα
];
36

c.)
⟨cos 2α, sin 2α⟩ =⟨a11 − a22
Γ,2a12Γ
⟩;
d.)
⟨cosα, sinα⟩ = ±
⟨√1
2
(1 +
a11 − a22Γ
), (sgn a12)
√1
2
(1− a11 − a22
Γ
)⟩,
ahol sgn az előjelfüggvénynek az a módosítása, amelyik 0-ra 1-et ad.
A 2× 2-es szimmetrikus mátrixok osztályozása
11.5. Tekintsük a [a11 a12a12 a22
]= 0
szimmetrikus mátrixot. Ezt lehet diagonalizálni (egy ortogonális mátrixszal). A diagonálisalak elemeinek (= az eredeti mátrix sajátértékeinek) előjel eszerint a mátrixoknak háromfajtája lehet:
• Elliptikus ≡ definit szimmetrikus forma ≡ azonos előjelű nemnulla sé. ⇔ ha
D = a11a22 − a212 > 0.
• Parabolikus ≡ elfajuló szimmetrikus forma ≡ egy 0 és egy nemnulla sé. ⇔ ha .
D = a11a22 − a212 = 0.
• Hiperbolikus ≡ indefinit szimmetrikus forma ≡ két különböző előjelű nemnulla sé. ⇔ha
D = a11a22 − a212 < 0.
37

12. Elméleti feladatok: Vektorok, mátrixok1. Ellenőrizzük, hogy
a.)
A =
a1
a2
a3
esetén (adjA)⊤ =
a2 × a3
a3 × a1
a1 × a2
;
b.)
A =
a1 a2 a3
esetén (adjA)⊤ =
a2 × a3 a3 × a1 a1 × a2
.2. A szokásos 3 dimenziós térben lássuk be az alábbi azonosságokat:
a.) Ax× Ay = (adjA)⊤(x× y).
b.) Ha A invertálható, akkor Ax× Ay = (detA)A−1,⊤(x× y).
c.) Ha A irányítástartó ortogonális, akkor Ax× Ay = A(x× y).
d.) Ha A irányításváltó ortogonális, akkor Ax× Ay = −A(x× y).
e.) (Ax, Ay, Az) = (detA)(x,y, z).
3. Skaláris szorzattal és irányítással ellátott n dimenziós térben az általánosított vektoriálisés vegyes szorzat kielégíti az alábbi azonosságokat:
i.) E(xσ(1), . . . ,xσ(n−1)) = (−1)σE(x1, . . . ,xn−1)
ii.) E(x1, . . . ,xn−1)xn = V (x1, . . . ,xn) = (−1)n−1x1E(x2, . . . ,xn).
iii.) V (Axσ(1), . . . , Axσ(n)) = (−1)σV (x1, . . . ,xn).
a.) E(Ax1, . . . , Axn−1) = (adjA)⊤E(x1, . . . ,xn−1).
b.) Ha A invertálható, akkor E(Ax1, . . . , Axn−1) = (detA)A−1,⊤E(x1, . . . ,xn−1).
c.) Ha A irányítástartó ortogonális, akkor E(Ax1, . . . , Axn−1) = AE(x1, . . . ,xn−1).
d.) Ha A irányításváltó ortogonális, akkor E(Ax1, . . . , Axn−1) = −AE(x1, . . . ,xn−1).
e.) V (Ax1, . . . , Axn) = (detA)V (x1, . . . ,xn).
Ezek milyen klasszikus azonosságoknak feleltethetők meg?
4. Az
A =
0 −a3 a2a3 0 −a1−a2 a1 0
3× 3-as antiszimmetrikus mátrix tengelyvektorát definiáljuk a
axisA = ⟨a1, a2, a3⟩ =
a1a2a3
38

előírással. Lássuk be, hogy
a.) Ha A,B antiszimmetrikus mátrixok, akkor
(axisA)× (axisB) = axis(AB−BA).
b.) Ha A antiszimmetrikus és S szimmetrikus, akkor
((trS)I− S) axisA = axis(AS+ SA).
c.)(adjF)⊤(axisA) = axis FAF⊤
d.) Ha F ortogonális, akkor
F(axisA) = (detF) axis FAF−1
5. Bizonyítandó, hogy egy B mátrixa ekvivalensek:
a.) B = a a⊤ valamilyen a (oszlop)vektorral.
b.) B legfeljebb 1 rangú, szimmetrikus, pozitív szemidefinit.
(Praktikus ellenőrzése: bármely két oszlop [vagy sor] proporcionális, a mátrix szimmet-rikus, minden diagonális elem ≥ 0.)
6. Ha B = [bij]ij olyan mint fent, akkor definiáljuk úgy a
splitB
vektort, hogy ha b11 = 0, akkor
splitB =1√b11
⟨b11, b12, . . . , b1n⟩;
ha b11 = 0, de b22 = 0, akkor
splitB =1√b22
⟨b21, b22, . . . , b2n⟩;
ha b11 = b22 = 0, de b33 = 0, akkor
splitB =1√b33
⟨b31, b32, . . . , b3n⟩;
stb; és ha b11 = b22 = . . . = bnn = 0, akkor
splitB = 0.
Belátandó, hogy a B = a a⊤ egyenlet megoldásai
a = ± splitB.
39

13. Gyakorlaton: Lineáris transzformációk témakör13.1. Projekciók mátrixreprezentációja:
proja =1
a21 + a22 + a23
a21 a1a2 a1a3a1a2 a22 a2a3a1a3 a2a3 a23
,proj⊥a = I− proja =
1
a21 + a22 + a23
a22 + a23 −a1a2 −a1a3−a1a2 a21 + a23 −a2a3−a1a3 −a2a3 a21 + a22
.Ezek mindegyikéből ± a
|a| rekonstruálható:
± a
|a|= ± split proja = ± split(I− proj⊤a ).
13.2. A vektorszorzás mátrixreprezentációja:
a× =
0 −a3 a2a3 0 −a1−a2 a1 0
.A mátrixból a persze rekonstruálható.
a = axis(a×).
13.3. Ortogonális mátrixokról: Kétféle van köztük:
• Irányítástartó: detA = 1. Ilyenkor van egy P ortogonális mátrix hogy
PAP−1 =
cosα − sinαsinα cosα
1
ahol 0 ≤ α ≤ π. P-ről feltehető hogy irányítástartó. Az irányítástartó ortogonálismátrixot 3-dim-ben „forgatási típusú”-nak is mondhatnánk.
Speciális esetek:
– α = 0: identitás;– α = π: tengelyre tükrözés;– 0 < α < π: valódi forgatás.
• Irányításváltó: detA = −1. Ilyenkor van egy P ortogonális mátrix hogy
PAP−1 =
cosα − sinαsinα cosα
−1
ahol 0 ≤ α ≤ π. P-ről feltehető hogy irányítástartó. Az irányítástartó ortogonálismátrixot 3-dim-ben „forgatva tükrözési típusú”-nak is mondhatnánk.
Speciális esetek:
40

– α = 0: tükrözés;– α = π: origóra való (középpontos) tükrözés;– 0 < α < π: valódi forgatva tükrözés.
13.4. Az ortogonális mátrixok geometriai képből kiinduló mátrixreprezentációja.Forgatás:
rota,α =1
a21 + a22 + a23
a21 a1a2 a1a3a1a2 a22 a2a3a1a3 a2a3 a23
+cosα
a21 + a22 + a23
a22 + a23 −a1a2 −a1a3−a1a2 a21 + a23 −a2a3−a1a3 −a2a3 a21 + a22
+sinα√
a21 + a22 + a23
0 −a3 a2a3 0 −a1−a2 a1 0
Forgatva tükrözés:
rot⊥a,α = − 1
a21 + a22 + a23
a21 a1a2 a1a3a1a2 a22 a2a3a1a3 a2a3 a23
+cosα
a21 + a22 + a23
a22 + a23 −a1a2 −a1a3−a1a2 a21 + a23 −a2a3−a1a3 −a2a3 a21 + a22
+sinα√
a21 + a22 + a23
0 −a3 a2a3 0 −a1−a2 a1 0
Speciális esetek:
• forgatás: α = 0-val:, identitás, 1 11
;
• forgatás α = 180-val: tengelyes tükrözés,
refla =1
a21 + a22 + a23
−a22 − a23 + a21 2a1a2 2a1a32a1a2 −a21 − a23 + a22 2a2a32a1a3 2a2a3 −a21 − a22 + a23
;
• forgatva tükrözés α = 0-val: (síkra) tükrözés,
refl⊥a =
1
a21 + a22 + a23
a22 + a23 − a21 −2a1a2 −2a1a3−2a1a2 a21 + a23 − a22 −2a2a3−2a1a3 −2a2a3 a21 + a22 − a23
;
• forgatva tükrözés α = 180-kal: középpontos tükrözés,−1−1
−1
.
41

13.5. Forgatás rekonstrukciója: Ilyenkor, hogy A ortogonális és detA = 1. Ekkor
trA = 1 + 2 cosα.
Ezzel megvan
α = arccostrA− 1
2.
Ekkor több lehetséges eset:a.) Ha α = 0, azaz trA = 3, akkor
A = I,
az identitás.b.) Ha 0 < α < 180, azaz 3 > trA > −1, akkor valódi forgatásról van szó.
A−A⊤
2 sinα=
1√a21 + a22 + a23
0 −a3 a2a3 0 −a1−a2 a1 0
,amiből a
a
|a|= axis
A−A⊤
2 sinα=
⟨a1√
a21 + a22 + a23,
a2√a21 + a22 + a23
,a3√
a21 + a22 + a23
⟩
tengelyirány rekonstruálható.c.) Ha α = 180, azaz trA = −1, akkor ez egy tengelyes tükrözés,
A = refla =1
a21 + a22 + a23
−a22 − a23 + a21 2a1a2 2a1a32a1a2 −a21 − a23 + a22 2a2a32a1a3 2a2a3 −a21 − a22 + a23
mátrix alakú. Ebből ± a
|a| tengelyirány előjel erejéig rekonstruálható:
± a
|a|= ± split proja = ± split
I+A
2.
13.6. Forgatva tükrözés rekonstrukciója: Ilyenkor, hogy A ortogonális és detA = −1. Ekkor
trA = −1 + 2 cosα.
Ezzel megvan
α = arccostrA+ 1
2.
Ekkor több lehetséges eset:a.) Ha α = 180, azaz trA = −3, akkor
A = −I,
az origóra való tükrözés.
42

b.) Ha 0 < α < 180, azaz −3 < trA < 1, akkor valódi forgatva tükrözésről van szó.
A−A⊤
2 sinα=
1√a21 + a22 + a23
0 −a3 a2a3 0 −a1−a2 a1 0
,amiből a
a
|a|= axis
A−A⊤
2 sinα=
⟨a1√
a21 + a22 + a23,
a2√a21 + a22 + a23
,a3√
a21 + a22 + a23
⟩
tengelyirány rekonstruálható.c.) Ha α = 0, azaz trA = 1, akkor ez egy síkra tükrözés,
A = refl⊥a =
1
a21 + a22 + a23
a22 + a23 − a21 −2a1a2 −2a1a3−2a1a2 a21 + a23 − a22 −2a2a3−2a1a3 −2a2a3 a21 + a22 − a23
mátrix alakú. Ebből a ± a
|a| tengelyirány (a sík normálvektora) előjel erejéig rekonstruálható:
± a
|a|= ± split proja = ± split
I−A
2.
13.7. Érdekesség: A fentiek szerint az i körüli α szögű elforgatás mátrixa:cosα − sinαsinα cosα
1
,a j körüli α szögű elforgatás mátrixa: cosα sinα
1− sinα cosα
,a k körüli α szögű elforgatás mátrixa:1 cosα − sinα
sinα cosα
.A j körüli forgatás egy kicsit furcsának tűnik az előjel elhelyezkedése miatt, de valójában
így kell a konzisztens irányítás miatt.
43

14. Elméleti feladatok: Ortogonális mátrixok1. Bázisáttérés ortogonális esetben
2. (Tetraéderteszt:)
a.) Forgatás típusú ortogonális leképezés mátrixa δ1, δ2, δ3 diagonális elemekkel kielégítia
δ1 + δ2 + δ3 ≥ −1,
δ1 − δ2 − δ3 ≥ −1,
−δ1 + δ2 − δ3 ≥ −1,
−δ1 − δ2 + δ3 ≥ −1
egyenleteket.
b.) A (δ1, δ2, δ3) ponthármas kielégíti a fenti egyenlőtlenségeket ⇔ ha a (1, 1, 1), (1,−1,−1),(−1, 1,−1), (1,−1,−1) pontok által generált tetraéderben van.
c.) Ha a fenti egyenlőtlenségek teljesülnek (δ1, δ2, δ3)-re, akkor van is olyan forgatásitípusú mátrix, amelynek ezek a diagonális elemei.
d.) Hány darab van? Mitől függ?
M.: Itt felhasználjuk, hogy ismerjük a forgatások mátrixalakját.
(a) Könnyű ellenőrizni direkt módon.
(b)
(δ1, δ2, δ3) =δ1 + δ2 + δ3 + 1
4(1, 1, 1) +
δ1 − δ2 − δ3 + 1
4(1,−1,−1)+
+−δ1 + δ2 − δ3 + 1
4(−1, 1,−1) +
−δ1 − δ2 + δ3 + 1
4(−1,−1, 1).
(c) Ekkor
cosα =trA− 1
2=δ1 + δ2 + δ3 − 1
2.
Ha cosα = 1, akkor ez csakis a ⟨δ1, δ2, δ3⟩ = ⟨1, 1, 1⟩ tetraédercsúcsban lehet.
Ha cosα < 1, akkor a következőképpen haladhatunk tovább:
a21a21 + a22 + a23
=δ1 − cosα
1− cosα=δ1 − δ2 − δ3 + 1
3− δ1 − δ2 − δ3,
a22a21 + a22 + a23
=δ2 − cosα
1− cosα=
−δ1 + δ2 − δ3 + 1
3− δ1 − δ2 − δ3,
a23a21 + a22 + a23
=δ3 − cosα
1− cosα=
−δ1 − δ2 + δ3 + 1
3− δ1 − δ2 − δ3
adódik. Nemnegatívak a tetraéderteszt szerint.
44

Ebből a tengelyrea
|a|=⟨±√
. . .,±√. . .,±√
. . .⟩.
Ebből kijön a szimmetrikus rész. Másrészt sinα kiszámolható, és az antiszimmetrikusrész kijön.
Meggondolható, hogy ami így kijön az tényleg megoldás lesz.
(d) Kiszámolva, az általános megoldásra a következő adódik. Alkalmazzuk a
∆0 =δ1 + δ2 + δ3 + 1
4,
∆1 =δ1 − δ2 − δ3 + 1
4,
∆2 =−δ1 + δ2 − δ3 + 1
4,
∆3 =−δ1 − δ2 + δ3 + 1
4
jelölést. (Ekkor 0 ≤ ∆0,∆1,∆2,∆3 és ∆0 +∆1 +∆2 +∆3 = 1, továbbá
δ1 = ∆0 +∆1 −∆2 −∆3,
δ2 = ∆0 −∆1 +∆2 −∆3,
δ3 = ∆0 −∆1 −∆2 +∆3
). Ekkor a megoldás δ1 2(ε1ε2√∆1∆2 − ε3
√∆0∆3) 2(ε1ε3
√∆1∆3 + ε2
√∆0∆2)
2(ε1ε2√∆1∆2 + ε3
√∆0∆3) δ2 2(ε2ε3
√∆2∆3 − ε1
√∆0∆1)
2(ε1ε3√∆1∆3 − ε2
√∆0∆2) 2(ε2ε3
√∆2∆3 + ε1
√∆0∆1) δ3
.Mindez a
a
|a|=
⟨ε1
√∆1
1−∆0
, ε2
√∆2
1−∆0
, ε3
√∆3
1−∆0
⟩tengelynek és
cosα = 2∆0 − 1
1− cosα = 2(1−∆0)
sinα = 2√
∆0(1−∆0)
szögnek felel meg.
Meggondolható:
Ha ⟨δ1, δ2, δ3⟩ ∈ tetraéder csúcs (egy ∆i nemnulla), akkor 1 megoldás.
Ha ⟨δ1, δ2, δ3⟩ ∈ tetraéderél belső pontja (két ∆i nemnulla), akkor 2 megoldás.
Ha ⟨δ1, δ2, δ3⟩ ∈ tetraéderlap belső pontja (három ∆i nemnulla), akkor 4 megoldás.
Ha ⟨δ1, δ2, δ3⟩ ∈ tetraéder belső pontja (négy ∆i nemnulla), akkor 8 megoldás.
45

3. Ha (b0, b1, b2, b3) ∈ S3, akkorb20 + b21 − b22 − b23 2(b1b2 − b0b3) 2(b1b3 + b0b2)2(b1b2 + b0b3) b20 − b21 + b22 − b23 2(b2b3 − b0b1)2(b1b3 − b0b2) 2(b2b3 + b0b1) b20 − b21 − b22 + b23
∈ SO(3).
Minden SO(3)-beli elem előáll olyen módon, és két S3-beli elem pontosan akkor hatá-rozza meg ugyanazt a speciális ortogonális transzformációt, ha antipodálisak.
Ez egyébként a⟨b1, b2, b3⟩√b21 + b22 + b2
tengely körüli β szögű
⟨cos β, sin β⟩ =⟨2b20 − 1, 2b0
√b21 + b22 + b2
⟩⟨cos
β
2, sin
β
2
⟩= ±
⟨b0,√b21 + b22 + b2
⟩elforgatásnak felel meg.
M.: A fenti tulajdonságok direkt módon ellenőrizhetőek.
Másként: Az előző feladat felhasználásával és jelölésrendszerével:
⟨b0, b1, b2, b3⟩ = ±⟨√∆0, ε1
√∆1, ε2
√∆2, ε3
√∆3⟩.
4. Az előző feladatban szereplő mátrixhatás a b0 + b1i + b2j + b3k (b20 + b21 + b22 + b23 = 1)kvaternióval való konjugálásnak felel meg.
M.: Direkt módon ellenőrizve:
(b0 + b1i + b2j + b3k)i(b0 − b1i− b2j− b3k) =
= (b0 + b1i + b2j + b3k)(b0i + b1 − b2k + b3j) =
= (b20 + b21 − b22 − b23)i + 2(b1b2 + b0b3)j + 2(b1b3 − b0b2)k,
(b0 + b1i + b2j + b3k)j(b0 − b1i− b2j− b3k) =
= (b0 + b1i + b2j + b3k)(b0j + b1k + b2 − b3i) =
= 2(b1b2 − b0b3)i + (b20 − b21 + b22 − b23)j + 2(b2b3 + b0b1)k,
(b0 + b1i + b2j + b3k)k(b0 − b1i− b2j− b3k) =
= (b0 + b1i + b2j + b3k)(b0k− b1j + b2i + b3) =
= 2(b1b3 + b0b2)i + 2(b2b3 − b0b1)j + (b20 − b21 − b22 + b23)k.
46

15. Affin koordinátarendszerek15.1. Az ortogonális mátrixok alkalmasak a tér origót fixáló egybevágóságainak a leírására.De persze az egybevágóságok áltánosan nem ilyenek, hanrm pl. ott vannak az eltolások is.Általában egy egybevágóság
x 7→ Ax+ b
alakú, ahol A egy ortogonális mátrix, b egy vektor. (Emlék: x,b oszlopvektorok.) Ha A nemortogonális, hanem általános alakú, de invertálható mátrix, akkor affin leképezésekről van szó.Példák síkban: merőleges tengelyes affinitás, nyírás (ezek speciálisan tengelyes affinitások).Példák térben: merőleges síkra affinitás, fizikai nyírás (ezek speciálisan síkra való affinitások).
De van egy trükk, amivel ezek a leképezések is mátrixosíthatóak: Az oszlopmátrix végéreegy 1-t rakunk, és ekkor x
1
7→
Ax+ b
1
=
A b
0 1
x
1
Az [
A b0 1
].
blokkmátrixot a leképezés affin mátrix reprezentációjának nevezzük.
15.2. Példa: Az A =
cosα 0 − sinα0 −1 0
− sinα 0 − cosα
és b =
123
adatok helyett vehetjük a
cosα 0 − sinα 10 −1 0 2
− sinα 0 − cosα 30 0 0 1
mátrixot.
15.3. Ideológia I.: Korábban észrevettük, hogy a helyvektorok és eltolásvektorok máshogyviselkednek amikor pl. tükrözünk. Itt arról van szó, hogy minden helyvektorhoz, vagy amiugyanaz, ponthoz, egy „1” súlyt rendelünk, amit az oszlop végére rakunk jelzésként.
Amikor egy eltolásvektort, vagyis két pont különbségét vesszük, akkor azb′1b′2b′31
−
b1b2b31
=
v1v2v30
alakú. Tehát az eltolásvektorok az affin reprezentációban v
0
47

alakúak. Jól mutatja, hogypont − pont = eltolásvektor,
pont + eltolásvektor = pont,
eltolásvektor + eltolásvektor = eltolásvektor.
Amikor a[A b0 1
]mátrixot alkalmazzuk az
[x0
]vektorra, akkor a
[A b0 1
] [x0
]=
[Ax0
]vektort kapjuk, ami igazolja az „eltolás-” avagy „irány-” vektor elnevezést, mert tényleg csakaz egybevágóság irányokra vonatkozó része (az A mátrix) hat rá.
15.4. Ideológia II.: Az affin síkra: Vesszük a közönséges xy síkot, és a pontjait felemeljükz = 1-re. Az origóból a felemelt síkra mutató vektorok a helyvektorok, a síkkal párhuzamos(„a síkban fekvő”) vektorok az eltolásvektorok. Így az eredeti síkot vektortérbe ágyaztuk.
Ez egy nagyon konkrét képet ad az affin síkra. Az affin térre ugyanez meg nagyon abszt-raktat, mert ott meg a 4-dimenziós térbe kerülünk.
48

16. Bázis- és koordinátaáttérés affin rendszerben16.1. A szokásos affin koordinátázásban a
1000
,0100
,0010
,0001
alapvektorok közül az első három utal az i, j,k koordináta-tengely-irány-alapegység vekto-rokra, a negyedik pedig az O origóra. Amikor új koordináta rendszert választunk, akkorszokásosan egy új bázisra,
a11a21a310
,a12a22a320
,a13a23a330
,b1b2b21
-ra
térünk át. Az első három vektor azt jelzi, hogy az új koordináta-tengely-alapvektorok miklesznek (a régiekhez viszonyítva), az utolsó pedig azt, hogy az origót eltoljuk ⟨b1, b2, b3⟩-mal.
Kifejezve:
[e′1 e′2 e′3 e′4
]=[e1 e2 e3 e4
] a11 a12 a13 b1a21 a22 a23 b2a31 a32 a33 b30 0 0 1
.Ilyenkor tehát bázisáttérési mátrix speciális
F =
A b
0 1
alakú. De aztán minden úgy megy, mint a szokásos vektortér esetben.
16.2. Kifejtve,
F−1 =
A−1 −A−1b
0 1
,
F⊤ =
A⊤ 0
b⊤ 1
,
F−1,⊤ =
A−1,⊤ 0
−b⊤A−1,⊤ 1
.Ha ortonormált bázisról térünk át ortonormáltra, akkor A ortogonális, és a formulák sokkalegyszerűbbek A−1 = A⊤ miatt.
49

16.3. Az eredeti duális bázis az x, y, z koordinaáta függvényekkel és a w súllyal volt megadva.Ez utóbbi, ha csak az affin sík pontjait tekintjük, akkor az mindig 1-et vesz fel. Így pl. az
ax+ by + cz + dw
általános duális vektor az affin síkon az
ax+ by + cz + d
függvénnyel egyenlő.Ha F−1 elemeit aij-vel és bi-vel jelöljük, akkor
x′ = a11x+ a12y + a13z + b1w
y′ = a21x+ a22y + a23z + b2w
z′ = a31x+ a32y + a33z + b3w
w′ = w
adódik a koordináta átírásra. Magán az affin síkon (w = 1) pedig
x′ = a11x+ a12y + a13z + b1
y′ = a21x+ a22y + a23z + b2
z′ = a31x+ a32y + a33z + b3.
16.4. Érdemes még egyszer megjegyezni, hogy
b = −A−1b.
50

17. Egybevágóságok gyakorlati implementációja.
17.1. Az egybevágóságokat mátrixokkal reprezentáljuk, és viszont, egy olyan affin mátrix,ahol A ortogonális az egybevágóságot ír le.
A gyakorlaton origót fixáló egybevágóságokra a
egybevágóság ↔ mátrix
megfeleltetés részletesen lesz tárgyalva. Általánosan viszont csak az
egybevágóság → mátrix
irány lesz kifejtve.
17.2. Emlék: Egybevágóságok a térben:
egybevágóság alapelemek rend ir. tükr.identitás ∅ 1 + 0eltolás eltolási vektor ∞ + 2
tengelyes tükr. tengely 2 + 2nem 180-os forg. tengely, α sp. ir. forg. szög 3, 4, . . . ,∞ + 2
180-os forgatva elt. tengely, párh. elt. vektor ∞ + 4nem 180-os forgatva elt. tengely, párh. elt. vektor, α ir. forg. szög ∞ + 4
síkra tükr. alapsík 2 - 1kp. tükr. centrum 2 - 3
v. forgatva tükr. centrum, tengely, alapsík, α sp. ir. forg. szög 4, 6, . . . ,∞ - 3csúsztatva tükr. alapsík, párh. eltolási vektor ∞ - 3
17.3. Tétel. Ha az E egybevágóságnak x fixpontja (azaz Ex = x), és F egy másik egybe-vágóság, akkor FEF−1 olyan egybevágóság, amelynek Fx fixpontja .
Biz.: (FEF−1)(Fx) = FEx = Fx.
Ez a tétel messzemenően általánosíthatható. Ideológia: FEF−1 ugyanolyan egybevágóság,csak F szerint arrébb helyezve. Konkrétan a tétel: (Idő hiányában nem bizonyítva.)
17.4. Általános tétel: Ha E egy egybevágóság az u1, u2, . . . uk alapelemekkel adva, és Fegy másik egybevágóság, akkor FEF−1 egy ugyanolyan egybevágóság, de az Fu1, Fu2, . . . Fukalapelemekkel adva.
17.5. Gyakorlati alkalmazás: Pl.: Ha ismert egy origón átmenő tengelyű forgatás A, (pon-
tosabban[A
1
]) mátrixa, de mi ehelyett b-n (vagyis
[b1
]-en) átmenő párhuzamos egyenes
körül akarunk forgatni, akkor egyszerűen el kell tolnunk az egészet b-vel (vagyis[b0
]-vel).
Ekkor az eltolt tengelyű forgatás mátrixa:[Id b
1
] [A
1
] [Id b
1
]−1
=
[A b−Ab
1
].
De minden más esetre (tükrözés, elforgatásos elhelyezés, stb.) ugyanígy megy a dolog.
51
17.6. Megjegyzés. Az fenti tétel kiterjed még általánosabban, de azért vigyázni kell:1.) Példa: A tétel minden további nélkül kiterjed hasonlóságokra.De affinitásokra már nem feltétlenül igaz minden esetben:2.) Példa: Ha E kp.-os tükrözés az x pontra, és F egy általános affinitás, akkor FEF−1
kp.-os tükrözés az Fx pontra. Ebben az esetben a tétel igaz marad.De:3.) Példa: Ha E az S síkra tükrözés, és F egy általános affinitás, akkor FEF−1 nem
feltétlenül az FS síkra tükrözés. A tétel nem marad érvényben. Miért? Az S síkra való tük-rözés alatt igazából „merőleges tükrözést” értettünk. De az általános affinitások nem tisztelika merőlegesség fogalmát. (Nem úgy, mint az egybevágóságok és hasonlóságok.)
52

18. Infinitezimális mozgások
Euklideszi vektorterek mozgásai
18.1. Először ortonormált bázisok mozgásával foglalkozunk.Tegyük fel hogy egy vektortér mozog egy időtől függő A(t) lineáris leképezéssel, ami egy
ortonormált A(t) mátrix-szal írható le. (A továbbiakban mindig egy ortonormált bázis alapjándolgozunk.) Feltehető, hogy a t = 0 időpillantban A(0) = Id, vagy más időpillanatban, deigazából ez nem kell.
Kövessük egy kijelölt vektor mozgását: Ekkor
b(t) = A(t)b0,
ahol b0 fix. Így
b(t) = A(t)b0 = A(t)A(t)−1A(t)b0 = A(t)A(t)−1b(t).
Mivel A ortogonális, ígyAA⊤ = Id
miattAA⊤ +AA⊤ = 0,
ígyAA⊤ = −AA⊤ = −(AA⊤)⊤.
Vagyis AA−1 = AA⊤ antiszimmetrikus. Tehát
b(t) = A(t)b(t),
aholA(t) = A(t)A(t)−1
antiszimmetrikus.
18.2. Megjegyzés. Középiskolás módon, A(t+∆t)−A(t)∆t
≈ A(t); avagy A−1(t)-vel szorozvajobbról A(t+∆t)A(t)−1 − Id ≈ A(t)∆t; így aztán
A(t+∆t)A(t)−1 ≈ Id+A(t)∆t
írható.
18.3. Ha a vektorokat egy bázisba gyűjtjük össze, akkor egyszerűen[b1 b2 b3
]= A(t)
[b1 b2 b3
]adódik. Mivel a
[b1 b2 b3
]egy ortogonális, tehát nem elfajuló mátrixot ad, ezért a hatást
átírhatjuk a másik oldalra: [b1 b2 b3
]=[b1 b2 b3
]A(t).
Állítás: A(t) is antiszimmetrikus, mivel antiszimmetrikus mátrix konjugáltja ortogonális-sal úgyszintén antiszimmetrikus mátrix lesz. Valóban, ha A antiszimmetrikus és U ortogonális,akkor
(UAU−1)⊤ = U−1,⊤A⊤U⊤ = U(−A)U−1 = −UAU−1.
Tehát kimondhatjuk:
53

18.4. Tétel. Ortonormált bázis mozgása az[b1 b2 b3
]= A(t)
[b1 b2 b3
]illetve [
b1 b2 b3
]=[b1 b2 b3
]A(t)
formulákkal írható le, ahol A(t), A(t) antiszimmetrikus mátrixok.
18.5. Megjegyzés 1.: Formálisan A = BB−1 és A = B−1B írható.
18.6. Megjegyzés 2.: Az A és A lényegében ugyanaz, csak az első a rögzített e1, e2, e3bázishoz viszonyítva le a változást, míg a második a b1,b2,b3 (mozgó) bázisban. (Valóban,hiszen A = B−1AB, B = IB).
18.7. Megjegyzés. (Nem kell vizsgára.) Fordítva, megmutatható az is, hogy ha[b1(0) b2(0) b3(0)
]egy ortonormális bázis, és A(t) egy mondjuk szakaszosan folytonos antiszimmetrikus mátrix-függvény, akkor egyértelműen létezik egy olyan[
b1(t) b2(t) b3(t)]
ortonormális bázisrendszer (kiterjesztés), hogy[b1(t) b2(t) b3(t)
]= A(t)
[b1(t) b2(t) b3(t)
]teljesüljön. Stb.
Speciálisan, ahogy az a differenciálegyenletek elméletéből ismert, megmutatható, hogy haA = A(t) t-ben konstans, akkor[
b1(t) b2(t) b3(t)]= (expA)
[b1(0) b2(0) b3(0)
];
stb.
18.8. Gyakorlaton volt a forgatás mátrixa. Tekintsünk most egy ilyet, de α helyére írjunkω∆t-t. Ez egy nagyon pici, ω szögsebességű forgatásnak felel meg. A
cosα = 1− α2
2+α4
4!− α6
6!+ . . .
sinα = α− α3
3!+α5
5!− α7
7!+ . . .
kifejtések alapján a forgatásra
≈ Id+ω√
a21 + a22 + a23
0 −a3 a2a3 0 −a1−a2 a1 0
∆t
adódik. Ez tehát egy ω szögsebességű,⟨
a1√a21+a
22+a
23
, a2√a21+a
22+a
23
, a3√a21+a
22+a
23
⟩egységtengely-
vektorú infinitezimális forgatás mátrixa.
54

18.9. Ez alapján, mivel A(t+∆t)A(t)−1 ≈ Id+A(t)∆t, azt mondhatjuk, hogy
A =
0 −ω3 ω2
ω3 0 −ω1
−ω2 ω1 0
azt mutatja, hogy az adott pillantban a mozgás egy
1√ω21 + ω2
2 + ω23
⟨ω1, ω2, ω3⟩
tengelyű nagyon kicsi, de √ω21 + ω2
2 + ω23
szögsebességű forgatásnak felel meg. A fenti tengelyt (a mozgás pillanatnyi jellegére utalva)momentán tengelynek is mondhatjuk.
18.10. Hasonlóan, ha például
A =
0 −ω3 ω2
ω3 0 −ω1
−ω2 ω1 0
,akkor [
b1 b2 b3
]=[b1 b2 b3
]A(t)
azt jelenti, hogyb1 = ω3b2 − ω2b3
b2 = ω1b3 − ω3b1
b3 = ω2b1 − ω1b2.
A korábban látottak alapján Id+ A(t)∆t egy, a
1√ω21 + ω2
2 + ω23
(ω1b1 + ω2b2 + ω3b3)
tengelyű nagyon kicsi, de √ω21 + ω2
2 + ω23
szögsebességű forgatásnak felel meg.(Itt feltettük, hogy detB(t) = 1, tehát a bázis szokásos irányítású, különben a tengely-
irányt invertálnunk kellene.)Ez ugyanaz, mint amit az A mátrix alapján kapunk, és ugyanazt a tengelyt (csak az
e1, e2, e3-vel kifejezve) és szögsebességet kapjuk.
18.11. Megjegyzés. (Nem kell vizsgára.) Valójában a következőt lehet igazolni. Ha az
A =
0 −a3 a2a3 0 −a1−a2 a1 0
55

antiszimmetrikus mátrix tengelyvektorát az
axisA =
a1a2a3
formulával definiáljuk, akkor bebizonyítható hogy tetszőleges U ortogonális mátrixra
axisUAU−1 = detU ·U axisA,
ami pont azt mutatja, hogy axisA pont a bázisáttérésnek megfelelő módon transzformálódik,kivéve, hogy bázis irányításváltásával megfordul a tengelyvektor.
(A fenti esetben az axisA = ⟨ω1, ω2, ω3⟩ vektor egyszerre kódolja a szögsebességet azamplitúdójával és a forgástengelyt az irányával.)
18.12. Tanulság: 3-dim-ban egy ortonormált bázis (vagy ami ugyanaz: skalárszorzatos vek-tortér) mozgásai apró, origón átmenő tengelyű forgatásokból tevődnek össze.
18.13. 2 dimenzióban a helyzet még sokkal egyszerűbb, ott ha
A(t) =
[−ω
ω
],
akkor ez egyszerűen egy origó körüli nagyon kicsi, de ω szögsebességű forgatásnak felel meg.
18.14. Megjegyzés. A síkban A(t) = A(t) ha b1,b2 szokásos (azaz e1, e2-vel megegyező)irányítású. Különben pedig −A(t) = A(t).
18.15. Tanulság: 2-dim-ban egy ortonormált bázis (vagy ami ugyanaz: skalárszorzatos vek-tortér) mozgásai apró, origó körüli forgatásokból tevődnek össze.
Az n× n -es antimmetrikus mátrixok halmazát o(n)-nel jelöljük.
18.16. Megjegyzés. Ha V egy skalárszorzatos tér L skalárszorzattal, akkor azon leképezésekamelyek mátrixa antiszimmetrikus valamely ortonormát bázisban (és így mindegyikben) azo(V, L) halmazt alkotják.
18.17. Megjegyzés. Bázisfüggetlen tárgyalásban A(t) ∈ o(V, L) de A(t) ∈ o(n) ott is.
56

Affin euklideszi vektorterek mozgásai
18.18. Most megnézzük az affin eset. Ilyenkor a koordináta rendszer b1(t),b2(t),b3(t) irány-bázisvektorokkal és az O(t) origóval írható le. Ekkor A(t) és A(t) ugyanúgy adódik, de
1. Az antiszimmetria csak a 3× 3-as részre vonatkozik2. A mátrix speciális affin alakú.Legáltalánosabban
A =
0 −ω3 ω2 v1ω3 0 −ω1 v2−ω2 ω1 0 v30 0 0 0
adódik. Erre úgy is gondolhatunk mint egy forgatás meg egy infinitezimális eltolás kompozí-ciója.
18.19. 2 dimenzióban ezt még könnyen interpretálhatjuk: ott
A(t) =
0 −ω v1ω 0 v20 0 0
.Itt két eset van:
1.: Ha ω = 0, akkor
A(t) =
0 0 v10 0 v20 0 0
,és Id+A(t)∆t egy nagyon kicsi, (de ⟨v1, v2⟩ sebességvektorú) eltolásnak felel meg.
2.: Ha ω = 0, akkor
A(t) =
0 −ω v1ω 0 v20 0 0
=
1 0 −v2/ω0 1 v1/ω0 0 1
0 −ω 0ω 0 00 0 0
1 0 −v2/ω0 1 v1/ω0 0 1
−1
.
Ilyenkor Id+A(t)∆t nem egy nagyon pici O körüli ω szögsebességű forgatásnak felel meg,hanem egy O+ ⟨−v2/ω, v1/ω⟩, vagyis eltolt középpontú forgatásnak. Az O+ ⟨−v2/ω, v1/ω⟩pontot, vagyis röviden csak, az (−v2/ω, v1/ω) pontot a mozgás centrumának, vagy a pillanat-nyi voltára utalva momentán centrumának mondjuk.
18.20. Tanulság: 2-dim-ban egy ortonormált koordinátarendszer (vagy ami ugyanaz: skalár-szorzatos affin tér) mozgásai apró eltolásokból, illetve momentán centrum körüli forgatásokbóltevődnek össze.
18.21. Hasonló mondható el a tér mozgásai kapcsán is: Ott is vagy egy apró eltolásról vanszó, vagy pedig egy momentán tengely körüli infinitezimális forgatásról, amihez még járul egy,a tengellyel párhuzamos infinitezimális eltolás. De ennek a leírása már bonyolultabb; ez márnem nevezhető teljes joggal szemléletesenek.
57

18.22. (Nem kell vizsgára.) Tegyük fel, hogy
A =
0 −ω3 ω2 v1ω3 0 −ω1 v2−ω2 ω1 0 v30 0 0 0
adja meg az infinitezimális mozgást. Ekkor
ω = ⟨ω1, ω2, ω3⟩ = axisA|3×3
adja meg az infinitezimális rotációs hatást. Itt is két eset van:1.) Ha ω = 0, akkor
A =
0 0 0 v10 0 0 v20 0 0 v30 0 0 0
,és ez egy, a
v = ⟨v1, v2, v3⟩sebességvektorú infinitezimális eltolásnak felel meg.
2.) Ha ω = 0, akkor
A =
0 −ω3 ω2 v1ω3 0 −ω1 v2−ω2 ω1 0 v30 0 0 0
=
1 0 0 p10 1 0 p20 0 1 p30 0 0 1
0 −ω3 ω2 w1
ω3 0 −ω1 w2
−ω2 ω1 0 w3
0 0 0 0
1 0 0 p10 1 0 p20 0 1 p30 0 0 1
−1
,
ahol⟨w1, w2, w3⟩ = w = projω v =
ωv
|ω|2ω,
és⟨p1, p2, p3⟩ = p =
ω × v
|ω|2
(ez utóbbi megoldja a −ω × p = proj⊥ω v egyenletet). Ezt úgy interpretálhatjuk, hogy egyolyan infinitezimális forgatva eltolás, ahol
• A forgatási tengely iránya ω|ω| =
1√ω21+ω
22+ω
23
⟨ω1, ω2, ω3⟩;
• a forgatási tengely áthalad a (p1, p2, p3) ponton;
• a forgatás szögsebessége |ω| =√ω21 + ω2
2 + ω23 (jobbkézszabály szerint);
• a forgatáshoz egy ⟨w1, w2, w3⟩ sebességvektorú infinitezimális eltolás tartozik.
Itt speciális eset amikor v⊥ω. Ekkor v = 0, és egy tengely körüli forgatásról van szó.
18.23. Tanulság: 3-dim-ban egy ortonormált koordinátrendszer (vagy ami ugyanaz: skalár-szorzatos affin tér) mozgásai infinitezimális eltolásokból, illetve infinitezimális csavarmozgásokbóltevődnek össze.
58

19. Gyakorlaton: Néhány konkrét affin mátrix19.1. Az ⟨a, b, c⟩-vel való eltolás mátrixa:
1 a1 b
1 c1
.19.2. Az (a, b, c) pontra való középpontos tükrözés mátrixa:
−1 2a−1 2b
−1 2c1
.19.3. Az ax+ by + cz + d = 0 síkra való tükrözés mátrixa:
−a2 + b2 + c2
a2 + b2 + c2−2ab
a2 + b2 + c2−2ac
a2 + b2 + c2−2ad
a2 + b2 + c2
−2ab
a2 + b2 + c2a2 − b2 + c2
a2 + b2 + c2−2bc
a2 + b2 + c2−2bd
a2 + b2 + c2
−2ac
a2 + b2 + c2−2bc
a2 + b2 + c2a2 + b2 − c2
a2 + b2 + c2−2cd
a2 + b2 + c2
0 0 0 1
.
19.4. Az ax+ by + cz + d = 0 síkra való vetítés mátrixa:
b2 + c2
a2 + b2 + c2−ab
a2 + b2 + c2−ac
a2 + b2 + c2−ad
a2 + b2 + c2
−aba2 + b2 + c2
a2 + c2
a2 + b2 + c2−bc
a2 + b2 + c2−bd
a2 + b2 + c2
−aca2 + b2 + c2
−bca2 + b2 + c2
a2 + b2
a2 + b2 + c2−cd
a2 + b2 + c2
0 0 0 1
.
59

19.5. Az ⟨x0, y0, z0⟩+ ⟨a, b, c⟩t egyenesre vetítés mátrixa:
a2
a2 + b2 + c2ab
a2 + b2 + c2ac
a2 + b2 + c2b2x0 + c2x0 − aby0 − acz0
a2 + b2 + c2
ab
a2 + b2 + c2b2
a2 + b2 + c2bc
a2 + b2 + c2a2y0 + c2y0 − abx0 − bcz0
a2 + b2 + c2
ac
a2 + b2 + c2bc
a2 + b2 + c2c2
a2 + b2 + c2a2z0 + b2z0 − acx0 − bcy0
a2 + b2 + c2
0 0 0 1
.
Megjegyzés: Az
x = bz0 − cy0, y = cx0 − az0, z = ay0 − bx0
jelöléssel a mátrix
a2
a2 + b2 + c2ab
a2 + b2 + c2ac
a2 + b2 + c2yc− zb
a2 + b2 + c2
ab
a2 + b2 + c2b2
a2 + b2 + c2bc
a2 + b2 + c2za− xc
a2 + b2 + c2
ac
a2 + b2 + c2bc
a2 + b2 + c2c2
a2 + b2 + c2xb− ya
a2 + b2 + c2
0 0 0 1
alakú. (Vö. Plücker koordináták később.)
19.6. Az ⟨x0, y0, z0⟩+ ⟨a, b, c⟩t egyenesre tükrözés mátrixa:
a2 − b2 − c2
a2 + b2 + c22ab
a2 + b2 + c22ac
a2 + b2 + c2−b
2x0 + c2x0 − aby0 − acz0a2 + b2 + c2
2ab
a2 + b2 + c2b2 − a2 − c2
a2 + b2 + c22bc
a2 + b2 + c2−a
2y0 + c2y0 − abx0 − bcz0a2 + b2 + c2
2ac
a2 + b2 + c2bc
a2 + b2 + c2c2 − a2 − b2
a2 + b2 + c2−a
2z0 + b2z0 − acx0 − bcy0a2 + b2 + c2
0 0 0 1
.
Bizonyítás. Látható, hogy a 3 × 3-as főrészek (az irányvektorokon való hatások) rendre aI,−I, refl⊥
n , proj⊥n , projv, reflv mátrixokkal írhatóak le. Az eltolásész az origón vett hatásból
rekonstruálható.
60

20. A projektív sík konstrukciója
20.1. Adott látópontból (szem-pontból) a teret [környező világot] síkra [papírlapra] lehetvetíteni perspektíven. Ha két sík [papírlap] adott, akkor az egyikről a másikra lehet vetíteniperspektíven a látóponton át. Így egy perspektív leképezés keletkezik a két sík [papírlap]között. Az ilyen vetítések vizsgálatából jött létre a projektív geometria.
20.2. Megjegyzés. A két síkról [papírlapról] lényegében egyértelműen tudunk az egyikről amásikra transzponálni képet. A projektív geometria így idealizál, mert nincs előre és hátralátkép. A valóságban minden (előre mutató irányokhoz tartozó képsíkhoz tartozó) képheztartozik egy (a hátra mutató irányokhoz tartozó átellenes képsíkhoz tartozó) másik kép is,és amikor új képsíkra térünk át, akkor az új képsíkhoz tartozó kép az előre és hátra mutatóeredeti két képből tevődik össze.
20.3. Lényeg, hogy mivel csak egy képsíkot tekintünk mindig, ezért a látóponton (szem-ponton) átmenő irányok akár előre, akár hátra mutatnak, mindig egy egyenest határoznakmeg, amelynek a döféspontja a képsíkkal mindig az adott irányhoz tartozó képsíkpont. Mivelazonban némely irányba (a képsíkkal párhuzamos irányokba) problematikus a vetítés, ezértérdemesebb az látópontból induló irányok fogalmából kiindulni. Így érkezünk el a projektívsík következő definíciójához.
Ennél a definíciónál az elképzelés az, hogy az origó a látópont. A számba jöhető képsíkok azorigón át nem menő síkok. Az origón átmenő irányoknak, amelyek a projektív sík pontjainakfelelnek meg, az origón átmenőn egyenesek felelnek meg.
20.4. (A projektív sík definíciója, első rész) Legyen V egy 3 dimenziós vektortér. (Szá-munkra R3 a legfontosabb.) Itt V elemei a közönséges értelemben vett v irányvektorok.Ekkor minden 0 = v ∈ V vektor meghatároz egy [v] tengelyirányt, v. axiális irányt. Ez aztjelenti, hogy [v] és [w]-t pontosan akkor tekintjük egyenlőnek, ha v és w egy nemnulla skalárszorzóban különböznek. Azt is gondolhatjuk, hogy [v] az nem más, mint a v vektor általmeghatározott 1 dimenziós altere V -nek.
Az ilyenekP(V ) = [v] : 0 = v ∈ V
összességét projektív síknak hívjuk. Elemeit, pedig, vagyis a [v]-ket pedig projektív pontok-nak.
Abban az esetben, ha V = R3, akkor az RP 2 = P(R3) jelölést használjuk.
20.5. Legyen L egy, az origón át nem menő sík. Ha v nem párhuzamos L-lel, akkor [v]-hezhozzárendelhetjük az
L ∩ [v]
pontot, az [v] L-beli nyomát, vagy reprezentánsát.Ha L párhuzamos v-vel, akkor metszéspont hiányában [v]-nek megfeleltethetjük a v-vel
párhuzamos L-beli l egyenesekid[v]
ekvivalenciaosztályát, és ezt a párhuzamossági osztály ideális pontjának nevezzük. Az összesilyen párhuzamossági osztály halmazát ∂L-lel jelölhetjük.
61

Amit most csináltunk, az az volt, hogy bijektív megfeleltetést létesítettünk a projektív síkpontjai és az
L = L ∪ ∂L
halmaz között.
20.6. Ezzel áll kapcsolatban a projektív sík klasszikus definíciója: Ezek szerint projektív síkotúgy készíthetünk, hogy veszünk egy L közönséges síkot, vesszük a egyenesek párhuzamosságiekvivalenciaosztályainak ∂L halmazát, az ekvivalenciaosztályokat ideális pontoknak hívjuk,és vesszük az L
L = L ∪ ∂L
projektív lezártját, amit projektív síknak nevezünk.
Mostanra már tudjuk, hogy mi a projektív sík mint ponthalmaz. De a projektív síkdefiníciója akkor válik geometriai értelemben teljessé, ha megmondjuk, hogy mik az egyeneseka projektív síkon.
20.7. (A projektív sík definíciója, második rész) Ha W ⊂ V egy 2-dimenziós altér,akkor a
[W ] = [v] : 0 = v ∈ W
ponthalmazt (a W -hez tartozó) projektív egyenesnek nevezzük. Az összes ilyen 2-dimenzósaltérből készített egyenes halmaza a projektív sík egyeneseinek a halmaza.
20.8. Érdemes meggondolni, hogy L-ra vonatkoztatva hogyan néz ki egy egy ilyen projektívegyenes. Itt két eset van:
• Ha W és L nem párhuzamos egymással, akkor a projektív egynenes pontjainak az
l = L ∩W
közönséges pontok felelnek meg, plusz egy ideális pont
idl,
ami az l-lel párhuzamos L-beli egyenesek evivalenciaosztálya. Ilyenkor [W ] pontjaimegfelelnek az
l = l ∪ ∂l = l ∪ idl
pontjainak. Az is világos hogy minden l ⊂ L egyenes előáll ilyen metszésvonalként.
• Ha W és L párhuzamosak (ez egyetlen egy eset), akkor [W ] pontjainak az ideális pontok
∂L
halmaza felel meg.
20.9. Ezért, a klasszikus definíció szerint úgy szokták mondani, hogy az L projektív lezártegyenesei kétfélék: vagy az eredeti egyenesekből készített l lezártak, vagy a ∂L ideális egyenes.
20.10. Illeszkedési viszonyok Meggondolható, hogy a projektív síkon
62

• Bármely két különböző pontra pontosan egy közös egyenes illeszkedik.
• Két különböző egyenes pontosan egy pontban metszi egymást.
20.11. Ez könyen látszik az eredeti, absztrakt defíció szerint:
• Két különböző 1-dimenziós altér pontosan egy 2-dimenziós altérben van benne (illetveegy ilyet generál).
• Két különböző 2-dimenzós (1 kodimenziós) altér pontosan egy közös 1-dimenziós (2kodimenziós) alteret tartalmaz (-ben metszik egymást).
20.12. De érdemes ugyanezt meggondolni a klasszikus L definícó szerint:
• Két közönséges (azaz L-beli) pontra pontosan egy egyenes illeszkedik: Valóban a rájukilleszkedő l közönséges egyenese l lezártja.
• Egy közönséges és egy ideális pontra pontosan egy egyenes illeszkedik: Valóban, az az legyenes, ahol l az adott közönséges ponton átmenő, az adott ideális pont párhuzamosságiekvivalenciaosztályába eső egyenes.
• Két ideális pontra pontosan egy egyenes illeszkedik.: Igen, ez az ideális egyenes.
• Két metsző közönséges egyenesből származó projektív egyenes pontosan egy pontbanmetszi egymást: Igen, a közönséges metszéspontban.
• Két párhuzamos közönséges egyenesből származó projektív egyenes pontosan egy pont-ban metszi egymást: Igen, a párhuzamossági osztályhoz tartozó ideális pontban.
• Egy közönséges egyenesből származó projektív egyenes, és az ideális egyenes pontosanegy pontban metszi egymást: Igen, a közönséges egyenesből származó projektív egyenesideális pontjában.
20.13. A klasszikus definíció hibája az az, hogy azt gondolhatjuk, hogy projektív sík ideá-lis pontjai valamiféle különleges objekumok, és esetszétválasztással kell élnünk. Az eredetiabsztrakt definíció alapján viszont látjuk, hogy a projektív sík pontjai önmagukban azonoselbírálás alá esnek; az, hogy melyiket tekintjük ideálisnak, az csak nézőpont kérdése (az L síkválasztásának a kérdése).
63
21. Illeszkedések, dualitás
21.1. Számolásilag a következő módon szokás eljárni: A projektív síkot az R3 vektortérbőlszármaztatjuk: RP 2 = P(R3). Egyben pedig szokás úgy tekinteni, mint a x3 = 1 sík projektívlezártját. Vagyis a projektív sík pontjainak a
[x] = [x1, x2, x3]
hármasok felelnek meg. Itt [x1, x2, x3] = [cx1, cx2, cx3] ha c = 0.Az (x, y) közönséges pontnak az [x, y, 1] projektív pont felel meg. Fordítva, ha x3 = 0,
akkor [x1, x2, x3] az (x1x3, x2x3) pontnak felel meg. Közönséges pontokra tehát x = x1
x3, y = x2
x3gondolható.
Az [x1, x2, 0] alakú pontok ideális pontnak foghatók fel, méghozzá az ⟨x1, x2⟩ irányvektorúegyenesek ideális pontjaként.
21.2. Egy W 2-dimenziós altér úgy jellemezhető, hogy azokat a ⟨x1, x2, x3⟩ vektorokat tar-talmazza, amire
a1x1 + a2x2 + a3x3 = 0;
itt (a, b, c) = (0, 0, 0). Ezért az ennek megfelelő egyenesre az
[a1, a2, a3]′
jelölést alakalmazzuk. Ez azt jelenti, hogy [x1, x2, x3] eleme az [a1, a2, a3]′ egyenesnek pontosanakkor, ha
a1x1 + a2x2 + a3x3 = 0.
Itt megint csak [a1, a2, a3]′ = [ca1, ca2, ca3]
′ ha c = 0.Ha x3-mal leosztunk, akkor azt tapasztaljuk, hogy az ilyen egyenesbe pontosan azok az
közönséges (x, y) pontok esnek, ahol
a1x+ a2y + a3 = 0.
Vagyis a projektív egyenes ennek az affin egyenesnek a lezártja. Ez utóbbi kommentár nemvonatkozik a kivételes [0, 0, 1]′ ideális egyenesre. Az a1, a2, a3 számhármast összegyűjthetjükegy a vektorba és azt írhatjuk, hogy
[a]′ = [a1, a2, a3]′.
21.3. Megjegyzés. Egy közönséges egyenesból származó projektív egyenesre (a1, a2) = (0, 0),és az egyenes ideális pontja
[a2,−a1, 0],de persze írhatnánk [−a2, a1, 0]-et, vagy [3a2,−3a1, 0]-et is.
A [0, 0, 1]′ ideális egyenes az összes [x1, x2, 0] ideális pontot tartalmazza.
21.4. Lemma. Az [a]′ egyenes és az [x] pont pontosan akkor illeszkedik egymásra, ha
a⊤x = 0
avagyax = 0.
(Itt legutóbb a számhármasok jól ismert skaláris szorzását használtuk.)
64

Biz. Valóban, hiszen a szorzást kifejtve pont a1x1 + a2x2 + a3x3 = 0 adódik.
21.5. Lemma. a.) Az [x] és [y] különböző pontokra az
[x× y]′
egyenes illeszkedik.b.) Az [a]′ és [b]′ különböző egyenesek metszéspontja a
[a× b]
pont.(Itt a számhármasok jól ismert vektoriális szorzását használtuk.)
Biz. a.) Mivel x és y nem proporcionális, ezért x×y = 0, tehát [x×y]′ egy egyenes. Másrészt(x× y)x = 0 és (x× y)y = 0 miatt mindkét pontra illeszkedik.
b.) Mivel a és b nem proporcionális, ezért a × b = 0, tehát [a × b] egy pontot határozmeg. Másrészt a(a× b) = 0 és b(a× b) = 0 ez a pont mindkét egyenesen rajta van.
21.6. D-t dualitási relációnak nevezzük a projektív síkon, ha minden pontnak bijektívenmegfeleltet egy egyenest, és viszont, méghozzá úgy, hogy tiszteletben tartja az illeszkedésfogalmát.
21.7. Ilyen dualitási relációt most könnyen tudunk mutatni: Az
[x1, x2, x3]
pontnak feleltessük meg az[x1, x2, x3]
′
egyenest. Ez tényleg bijektív, és még illeszkedéstartó is, mert korábbi lemmánk szerint [x] ∈[y]′ ⇔ xy = 0 ⇔ [y] ∈ [x]′.
21.8. Következmény. Ha be tudunk bizonyítani a projektív síkra egy olyan egyszerű általá-nos állítást, ami a pont, egyenes és illeszkedés fogalmát használja, akkor ki lehet mondani egyolyan állítást is, amelyikben a pont helyett egyenest, egyenes helyett pedig pontot mondunk.
Valójában ennek a megfigyelésnek az érvénye még sokkal jobban tágítható; ahogy fogal-maink bővülnek, egyre inkább kiterjeszthetjük a dualitás szótárát. Pl.: nem elfajuló kúpszeletpontja ↔ duális kúpszelet érintője; nem elfajuló kúpszelet metsző egyenese ↔ duális kúpszeletkülső pontja; stb.
65

22. Projektív leképezések
22.1. A projektív sík K : RP 2 → RP 2 bijekcióját kollineációnak nevezzük, ha egyenestegyenesbe visz. Könnyen meggondolható, hogy ilyenkor bijektív az egyenesek halmazán.
22.2. Legyen A egy 3 × 3-as nem elfajuló (azaz invertálható) mátrix. Ekkor legyen [A] :RP 2 → RP 2 az a leképezés, amelyik az [x] ponthoz a [Ax] pontot rendeli hozzá. Az ilyenleképezéseket projektív leképezésnek, vagy projektivitásnak nevezzük.
Mivel az invertálható lineáris leképezések 1 ill. 2 dimenziós alteret 1 ill. 2 dimenziósaltérbe visznek, illetve bijektív megfeleltetéseket létesítenek ezek halmazain, méghozzá illesz-kedéstartó módon, ezért megállapíthatjuk, hogy minden projektivitás kollineáció.
Ennek az állításnak a megfordítása egy nagyon nevezetes tétel:
22.3. Tétel (A projektív geometria alaptétele).A projektív sík minden kollineációja projektivitás.
Ennek a tételenk a bizonyítása túl hosszadalmas, ezért nem végezzük el. Jelentőségeviszont nagyon nagy. Azt mondja ki, hogy minden illeszkedéstartó leképezés a lineáris struk-túrából származik.
22.4. Megjegyzés. (Nem kell vizsgára.) Mi az R test feletti vektortéren vezettünk be pro-jektív geometriát. De lehet használni más testeket is, például C-t is. Ilyenkor az alaptételállítása módosításra szorul, mert a lineáris leképezések által indukált kollineációkon túl bekell kombinálni a test-automorfizmusokból származó kollineációkat is. Meggondolható, hogyC felett a minden koordináta konjugálását végző leképezés kollineáció, de nem C-lineáris hatáshozza létre.
22.5. Megjegyzés. Itt [A] = [cA] ha c = 0. De ha A és B nem proporcionálisak, akkor[A] = [B].
Valóban, ha A és B nem proporcionálisak , akkor tekintsük a B−1A mátrixot. Mivel eznem egy konstans mátrix, ezért van egy olyan x vektor, ami nem sajátvektora B−1A-nak.Azaz [x] = [B−1Ax]. Ekkor viszont A-t alkalmazva látjuk hogy [Bx] = [Ax]. Tehát [A] és[B] más értéket vesz fel [x]-en.
22.6. Láttuk, hogy [A] az[x]
pontot a[Ax]
pontba viszi. De mi van az egyenesekkel?
22.7. Lemma. A [A] projektivitás az[u]′
egyenest a[A−1,⊤u]′
egyenesbe viszi.
66

Biz.: Ez következik abból hogy: [u]′ illeszkedik [x]-re ⇔ u⊤x = 0 ⇔ u⊤A−1Ax = 0 ⇔(A−1,⊤u)⊤(Ax) = 0 ⇔ [A−1,⊤u]′ illeszkedik [Ax]-re.
Most néhány speciális esettel foglalkozunk:
22.8. Ha
A =
a11 a12 b1a21 a22 b20 0 1
alakú, akkor egy (x, y) = [x, y, 1] közönséges ponton úgy hat, mint egy affin leképezés. Ezértaz affin leképezéseket (mátrixokat) tekinthetjük úgy is, mint projektív leképezéseket (mátri-xokat).
22.9. Lemma. Egy projektív leképezés pontosan akkor affin, ha önmagába viszi az ideálisegyenest.
Biz.: Első érvelés: Az, hogy a [0, 0, 1] ideális egyenes önmagába kerül az azt jelenti, hogy
A−1,⊤ =
∗ ∗ 0∗ ∗ 0∗ ∗ c
alakú. Mivel konstanssal való szorzás nem számít, ezért c = 1 feltehető. Ekkor viszont Apontosan olyan alakú mint fent.
Második érvelés: Az, hogy az [1, 0, 0] és [0, 1, 0] ideális pontokba, vagyis [∗, ∗, 0] alakúpontokba mennek, az pont azt jelenti, hogy az A mátrix∗ ∗ ∗
∗ ∗ ∗0 0 c
alakú. A konstanssal való szorozhatóság miatt c = 1 feltehető.
22.10. Tegyük fel hogy adott egy P projektivitás. Ekkor azt mondjuk hogy az x pont fixpont,ha P önmagába viszi. Azt mondjuk, hogy az e egyenes fixegyenes, ha P önmagába viszi. Aztmondjuk, hogy az e egyenes tengely, ha minden pontja fixpont (ekkor persze fixegyenes islesz). Azt mondjuk, hogy az x pont centum, ha minden rá illeszkedő egyenes fixegyenes(ekkor persze fixpont is lesz).
22.11. Lemma.a.) [A]-nak [x] fixpontja ⇔ A-nak x sajátvektorab.) [A]-nak [u]′ fixegyenese ⇔ A−1,⊤-nak u sajátvektora
22.12. Tétel. Ha egy projektivitásnak van tengelye, akkor van centruma is; és fordítva, haegy projektivitásnak van centruma, akkor van tengelye is.
(Ezt most részletesen nem bizonyítjuk, de nem nehéz. Algebrai értelemben ez pont azgeometriai értelemben vett kettős sajátérték esetét írja le.)
22.13. A fenti tételben szereplő projektivitásokat centrális-axiális kollineációknak nevezik; azidentitást gyakran nem is soroljuk ide mert az nagyon egyszerű.
67

22.14. Példa: Meggondolható hogy azok a centrális-axiális kollineációk, amelynek a tengelyeaz ideális egyenes, azok pontosan a homotéciák, vagyis a középpontos hasonlóságok, és azeltolások. Az előbbi esetben a centrum a középpont lesz, az utóbbiban pedig az eltolásirányába eső ideális pont; illetve identitás esetén minden centrumnak tekinthető.
22.15. Tétel. [A] pontosan akkor CAK, ha a mátrixa hasonlóság és nemnulla konstanssalvaló szorzás erejéig a a
1
vagy
1 1 11
alakú.
22.16. Tétel. Minden projektivitás
• vagy affinitás,
• vagy előáll egy centrális-axiális kollineáció és egy irányítástartó hasonlóság kompozíció-jaként.
(Ezt most megint nem bizonyítjuk részletesen, de azt kell meggondolni, hogy mi történikaz ideális egyenessel.)
22.17. Megjegyzés. Ha síkot [papírlapot] egy másik, nem párhuzamos, síkra [papírlapra]vetítünk, akár párhuzamosan, akár perspektivikusan, és a két síkot [lapot] a metszésvonalmentén egymásrahajtjuk, akkor mindig egy centrális-axiális kollineáció keletkezik, a síkon[papírlapon], hiszen a metszésvonal mindig tengely lesz. Meggondolható, hogy az ilyen fajtaátvetítes lényegében a centrális-axiális kollineációnak felel meg. Az, hogy elforgatunk meglekicsinyítünk, az képsíkok [papírlapok] esetében természetes dolog.
A fentiek fényében a tétel pontosan azt mondja ki, hogy a projektivitások vagy affinitá-sok (tehát nagyon szép leképezések) vagy olyanok, amelyek lényegében papírlapok egymásravetítéséből adódnak („fényképezésből”).
68

23. Kettősviszony23.1. Ha x,y, z,w komplanáris, de páronként független vektorok, akkor kielégítenek egy
z = λ11x+ λ21y, w = λ12x+ λ22y
lineáris relációt. Ilyenkor azt mondjuk, hogy a kettősviszonyuk
(x,y, z,w) =λ12λ21λ11λ22
.
23.2. Megjegyzés. Vagyis a kettősviszonyt az x,y, z,w vektorok által kielégített lineárisrelációból származtatjuk.
23.3. Beláthatjuk, hogy ha valamelyik vektort nemnulla konstanssal szorozzuk, akkor a ket-tősviszony ugyanaz marad: Ha x helyett x′ = cx-et veszünk, akkor az új lineáris reláció
z =λ11cx′ + λ21y, w =
λ12cx′ + λ22y;
a kettősviszony nyilván ugyanaz. A kép hasonló, ha y helyett y′ = cy-t veszünk. Ha z helyettz′ = cz-et veszünk, akkor az új lineáris reláció
z′ = cλ11x+ cλ21y, w = λ12x+ λ22y;
a kettősviszony megint ugyanaz. A kép hasonló, ha w helyett w′ = cw-t veszünk.Mivel a tagonkénti konstanssal való szorzás nem befolyásolja a dolgokat, ezért a következő
definíció érvényes:
23.4. Ha [x], [y], [z], [w], egy projektív egyenesre eső, de különböző pontok, akkor a
([x], [y], [z], [w])
kettősviszonyt úgy definiáljuk mint a megfelelő vektornégyes kettősviszonyát. Meggondolható,hogy ez a kettősviszony az R \ 0, 1 halmazban veszi fel az értékeit.
23.5. Kettősviszonyszámoló lemma. Ha az alábbi kettősviszony-kifejezésben szereplővektorok páronként függetlenek, akkor
([γ11u+ γ21v], [γ12u+ γ22v], [µ11u+ µ21v], [µ12u+ µ22v]) =
=(γ11µ21 − µ11γ21)(γ12µ22 − µ12γ22)
(γ11µ22 − µ12γ21)(γ12µ21 − µ11γ22)=
∣∣∣∣γ11 µ11
γ21 µ21
∣∣∣∣ ∣∣∣∣γ12 µ12
γ22 µ22
∣∣∣∣∣∣∣∣γ11 µ12
γ21 µ22
∣∣∣∣ ∣∣∣∣γ12 µ11
γ22 µ21
∣∣∣∣Biz.: A vektornégyes úgy írható, hogy
x,y,
∣∣∣∣µ11 γ12µ21 γ22
∣∣∣∣∣∣∣∣γ11 γ12γ21 γ22
∣∣∣∣x+
∣∣∣∣γ11 µ11
γ21 µ21
∣∣∣∣∣∣∣∣γ11 γ12γ21 γ22
∣∣∣∣y,∣∣∣∣µ12 γ12µ22 γ22
∣∣∣∣∣∣∣∣γ11 γ12γ21 γ22
∣∣∣∣x+
∣∣∣∣γ11 µ12
γ21 µ22
∣∣∣∣∣∣∣∣γ11 γ12γ21 γ22
∣∣∣∣y.Ekkor a definíció alkalmazható.
69

23.6. Megjegyzés. (Nem kell vizsgára.) A fenti állítást absztraktabban, de szemléltesebbenúgy is fogalmazhatjuk, hogy
([a], [b], [c], [d]) =a ∧ c
c ∧ b:a ∧ d
d ∧ b,
ahol ∧ lehet bármi, ami nemtriviális, bilineáris, antiszimmetrikus.23.7. Lemma. (Kettősviszony permutációk.)
(ABCD) = λ
esetén az(BACD) =
1
λ(ACBD) = 1− λ
(ABDC) =1
λalapazonosságok teljesülnek. Továbbá hasznos:
(CDAB) = λ.
Biz.: A kettősviszonyszámoló lemmát alkalmazva az eredeti
γ11 = 1, γ21 = 0, γ12 = 0, γ22 = 1, µ11 = λ11, µ21 = λ21, µ12 = λ12, µ22 = λ22
leosztás helyett a0, 1, 1, 0, λ11, λ21, λ12, λ22
1, 0, λ11, λ21, 0, 1, λ12, λ22
1, 0, 0, 1, λ12, λ22, λ11, λ21
λ11, λ21, λ12, λ22, 0, 1, 1, 0
beírásokat alkalmazva kapjuk az eredményt.23.8. Az alapazonosságokból már mindenféle permutáció kettősviszonyát meghatározhatjuk:
(ABCD) = λ (BACD) =1
λ(CABD) =
1
1− λ(DABC) =
λ
λ− 1
(ABDC) =1
λ(BADC) = λ (CADB) = 1− λ (DACB) = 1− 1
λ
(ACBD) = 1− λ (BCAD) = 1− 1
λ(CBAD) =
λ
λ− 1(DBAC) =
1
1− λ
(ACDB) =1
1− λ(BCDA) =
λ
λ− 1(CBDA) = 1− 1
λ(DBCA) = 1− λ
(ADBC) = 1− 1
λ(BDAC) = 1− λ (CDAB) = λ (DCAB) =
1
λ
(ADCB) =λ
λ− 1(BDCA) =
1
1− λ(CDBA) =
1
λ(DCBA) = λ
70

23.9. Ha a, b, c, d ∈ R különböző, u,v független vektorok, akkor
[[u+ av], [u+ bv], [u+ cv], [u+ dv]] =a− c
c− b:a− d
d− b.
23.10. Jelentése: Ha az A,B,C,D pontok egy beskálázott egyenesre esnek, a, b, c, d skála-jelzésekkel, akkor
(ABCD) =a− c
c− b:a− d
d− b=
(ABC)
(ABD).
23.11. Ha a, b, c ∈ R különbözőek, u,v független vektorok, akkor
[[u+ av], [u+ bv], [u+ cv], [v]] = −a− c
c− b.
23.12. Jelentése: Ha az A,B,C pontok egy beskálázott egyenesre esnek, a, b, c skála-jelzésekkel, ∞ az egyenes ideális pontja akkor
(ABC∞) = −a− c
c− b= −(ABC).
23.13. Ha [a]′, [b]′, [c]′, [d]′ egy ponton átmenő egyenesek a projektív síkon, akkor a kettős-viszonyukat úgy definiáljuk, mint az a,b, c,d vektorok kettősviszonyát.
23.14. Papposz tétele: Ha e egyenes, E egy külső pont, A,B,C,D pontok az e egyenesenvannak, a, b, c, d az A,B,C,D pontokat az E ponttal összekötő egyenesek, akkor
(ABCD) = (abcd).
Biz.: Ha A = [x], B = [y], C = [z], D = [w], E = [e], akkor azt kell bizonyítani, hogy
x,y, z,w
kettősviszonya ua. mintx× e,y × e, z× e,w × e
kettősviszonya. De ez igaz, mert ha az előbbi négyes kielégít egy lineáris relációt, akkor amásodik négyes is.
23.15. Tétel. A projektív leképezések megtartják a kettősviszonyt.
Biz.: Tegyük fel, hogy az A invertálható lineáris leképezés indukálja a projektivitást. Ekkorha
x,y, z,w
vektorok kielégítenek egy lineáris relációt, akkor az
Ax, Ay, Az, Aw
vektorok is (és fordítva is).
23.16. Általában, ha (ABCD) = −1, akkor azt mondjuk, hogy az A,B,C,D pontok harmo-nikusan választják el egymást.
71

23.17. Megj.: Meggondolható, hogya.) −∞ < (ABCD) < 0 esetén A és B elválasztja egymástól C-t és D-t.b.) (ABCD) > 0 esetén A és B nem választja el egymástól C-t és D-t. Ezen belül:b1.) 0 < (ABCD) < 1 esetén a pontok A,B,D,C projektív körüljárásban követik egy-
mást,b2.) 1 < (ABCD) < ∞ esetén a pontok A,B,C,D projektív körüljárásban követik
egymást.
23.18. A kettősviszony ésszerűen kiterjeszthető bizonyos elfajult esetekre:Elfajult esetek:
(AACD) = 1
(ABAD) = 0
(ABBD) = ∞
(ABCA) = ∞
(ABCB) = 0
(ABCC) = 1
Kettősen elfajult esetek:(AACC) = 1
(ABAB) = 0
(ABBA) = ∞
Háromszorosan és négyszeresen elfajult már tényleg nem értelmezett.
23.19. Példa gyakorlati alkalmazásra: Távolságrekonstrukció fényképből.
72

24. Másodrendű görbék (kúpszeletek)
24.1. Az euklideszi síkon egy másodrendű görbe egy, az
a11x2 + 2a12xy + a22y
2 + 2a13x+ 2a23y + a33 = 0
egyenlettel leírt alakzat, ahol nem minden együttható 0.Ezt ki lehet terjeszteni a projektív síkra is. Vegyük az
a11x20 + 2a12x1x2 + a22x
22 + 2a13x1x3 + 2a23x2x3 + a33x
23 = 0
egyenletet. Ez igazi projektív egyenlet mert az x1, x2, x3 ponthármas pontosan akkor elégítiki, ha a cx1, cx2, cx3 ponthármas kielégíti (c = 0). Tehát van értelme arról beszélni, hogy egy[x] = [x1, x2, x3] projektív pont kielégíti az egyenletet vagy nem.
Abban az esetben, ha egy [x1, x2, x3] = [x, y, 1], azaz közönséges, pontot nézünk, akkorez pont az eredeti egyenlettel ekivalens. De különbség, hogy a második esetben az x3 = 0választással még ideális pontok is bejöhetnek.
Az első egyenletet affin, a második egyenletet projektív egyenletnek nevezzük. Világos,hogy minden affin egyenletből lehet egy projektív egyenletet gyártani és viszont.
24.2. Itt most érdemes tisztázni, hogy mi is számunkra egy másodrendű görbe (vagy kúp-szelet). Két lehetőség van:
1. Az egyenletet kielégítő pontok halmazát nevezzük másodrendű görbének; vagy2. magát az egyenletet ( = 0 konstans szorzás erejéig, mert ennél azért nem érdemes
finomabbnak lenni1).A 2. nézőpont finomabb, mert az egyenlet meghatározza a pontokat, de a pontokból nem
tudunk következtetni egyértelműen az egyenletre. Példa:
x2 + y2 = 0 ill. x2 + 2y2 = 0,
mindegyik egyenletet csak az origó elégíti ki, de egyenletek nem csak konstans szorzó erejéigkülönböznek; vagy
x2 + y2 = −1 ill. (x− 2)2 + 2(y − 3)2 = −3,
amelyeknek nincs is pontja, de az egyenletek eléggé mások.Mi a második nézőpontot fogjuk követni: a másodrendű görbék egyenletek, amelyeknek
vagy vannak pontjai, vagy nincsenek. Az úgyis kiderül, hogy az érdekes esetekben a pontokhalmaza meghatározza a másodrendű görbét.
24.3. Praktikus az
A =
a11 a12 a13a21 a22 a23a31 a32 a33
szimmetrikus mátrixot használni, ahol a21 = a12, a31 = a13, a32 = a23. Ekkor a projektívegyenlet [
x1 x2 x3] a11 a12 a13a21 a22 a23a31 a32 a33
x1x2x3
= 0
1Hacsak nem akarjuk a kúpszeletet irányítani is.
73

alakú, vagyisx⊤Ax = 0.
Ezt nevezzük az A mátrixhoz tartozó másodrendű görbének. Itt megint úgy tekintjük adolgokat, hogy A csak = 0 konstanssal való szorzás erjéig számít. Jelöljük az így kapottmásodrendű görbét A-val.
24.4. Tegyük fel, hogy van egy projektív transzformáció, P mátrixszal és egy másodren-dű görbe A mátrixszal. Ekkor megkérdezhetjük, hogy hogyan lehet leírni azon másodren-dű görbéket, amelyek úgy keletkeznek, hogy az eredeti másodrendű görbe görbe pontjaitelmozgatjuk [P]-vel. Ilyenkor az új másodrendű görbe [x] pontjaira az igaz, hogy azok [y] =[P−1x] ősképei kielégítik az y⊤Ay = 0 egyenletet, vagyis a
(P−1x)⊤A(P−1x) = 0,
azazx⊤(P−1,⊤AP−1)x = 0
egyenletet.
24.5. Definíció: Az A kúpszelet [P] általi képének nevezzük a P−1,⊤AP−1 kúpszeletet.
A korábbiak szerint:
24.6. Lemma: Az A kúpszelet pontjainak halmazának a [P] projektivitás általi képe aP−1,⊤AP−1 kúpszelet pontjainak a halmaza.
24.7. Az A kúpszeletet nemelfajulónak nevezzük, ha A nem elfajuló.Az A kúpszeletet projektív [affin] értelemben valódinak nevezzük, ha a projektív [affin,
vagyis közönséges] síkbeli pontjainak a halmazából tudunk a kúpszelet (egyenleté)re követ-keztetni. (Ez ügyben a terminológia nem egységes.)
24.8. Klasszifikálhatjuk a kúpszeleteket egybevágóságok, hasonlóságok, affinitások, projektívtranszformációk, stb. erejéig. Először egybevágóságok erejéig: Azaz itt olyan [P] hatásokerejéig, ahol
P =
[U v0 1
],
ahol U 2× 2 ortogonális transzformáció.Az, hogy egybevágóság erejéig, algebrailag azt jelenti, hogy a A és P−1,⊤AP−1 má-
sodrendű görbéket ekvivalensnek tekintjük, ha P egybevágóság. Geometriailag azt is jelenti,hogy a görbék ponthalmazai egybevágósággal egymásba kerülnek.
24.9. Tétel: Egybevágóság erejéig a másodrendű görbék affin egyenletei a következők lehet-nek:
1.a.)x2
a2+y2
b2= 1, (a ≥ b > 0): ellipszis
1.b.)x2
a2+y2
b2= 0, (a ≥ b > 0, a2 + b2 = 1): pontellipszis (v. metsző képzetes egyenespár)
74

1.c.)x2
a2+y2
b2= −1, (a ≥ b > 0): képzetes ellipszis
2.a.)x2
a2− y2
b2= 1, (a, b > 0): hiperbola
2.b.)x2
a2− y2
b2= 0, (a ≥ b > 0, a2 + b2 = 1): metsző egyenespár
3.a.) y2 = 2px, (p > 0): parabola
3.b.) y2 = −p, (p > 0): ideális pontellipszis (v. párhuzamos képzetes egyenespár)
3.c.) y2 = 0, kettős egyenes
3.d.) y2 = p, (p > 0): párhuzamos egyenespár
4.a.) x = 0, valós-ideális egyenespár
4.b.) 1 = 0, kettős ideális egyenes
24.10. Ha csak hasonlóság erejéig osztályozunk, akkor az osztályozás durvább. A (3a), (3b),(3d) esetekben a p = 1 reprezentáns elég, míg az (1a), (1c), (2a) esetekben az a2 + b2 = 1reprezentáns elég. Végeredményben az (1a)–(2b) esetekben egy alakparaméter megmarad azosztályozásban, míg a (3a)–(4b) esetekben a hasonlóság csak egy-egy osztályt ad meg.
24.11. Ha csak affinitás erejéig osztályozunk, akkor az osztályozás még durvább. Az (1a)–(4b) esetekben a finomabb osztályozás teljesen összeesik, ezek az esetek már csak egy-egyaffinitási osztályt határoznak meg, az a, b, p-től való függés teljesen megszűnik.
24.12. Osztályozhatunk projektivitás erejéig is: Ekkor az osztályozás sokkal durvább, hi-szen nagyobbak az ekvivalenciaosztályok. Továbbá, ilyenkor az osztályozás nem más mint aszimmetrikus bilineáris formák osztályozása nemnulla konstanssal való szorzás erejéig.
24.13. Tétel: Projektivitás erejéig a másodrendű görbék affin egyenletei a következők lehet-nek:
A.) x21 + x22 − x23 = 0 : projektív kör (valódi, nemelfajuló kúpszelet)
B.) x21 + x22 + x23 = 0 : projektív képzetes kör (képzetes, nemelfajuló kúpszelet)
C.) x21 − x22 = 0 : metsző projektív egyenespár (valódi, elfajuló kúpszelet)
D.) x21 + x22 = 0 : projektív pontellipszis (képzetes, elfajuló kúpszelet)
E.) x21 = 0 : projektív kettős egyenes (valódi, kettősen elfajuló kúpszelet)
Az előző osztályozáshoz képest ezek az esetek úgy esnek szét, hogy
A.) (1a), (2a), (3a) aszerint, hogy az ideális egyenes
elkerüli, vagy metszi, vagy érinti a proj. kört
B.) (1c)
75

C.) (2b), (3d), (4a) aszerint, hogy az ideális egyenes
a két szárban metszi, vagy a metszéspontban metszi, vagy teljes egyenesben metszi ametsző egyenespárt
D.) (1b), (3b) aszerint, hogy az ideális egyenes
áthalad a pontján, vagy nem halad át a pontján
E.) (3c), (4b) aszerint hogy az ideális egyenes
egypontban metszi a tartóegyenest, vagy egybeesik a tartóegyenessel.
24.14. Megjegyzés: a.) Az affin síkon akkor lehet a kúpszeletet rekonstruálni a pontjaibólha
A indefinit, nem elfajuló vagy[a11 a12a21 a22
]indefinit, nem elfajuló.
b.) A projektív síkon akkor lehet a kúpszeletet rekonstruálni a pontjaiból (vagyis valódi)ha legalább két pontja van.
24.15. Az érdekes eset az (A), kör-ellipszis-hiperbola-parabola eset. Ezek egymásba mennekprojektív transzformációkkal. A továbbiakban elsősorban ilyeneket tekintünk.
76

25. Másodrendű görbék geometriája
25.1. Egy [x] pontnak háromféle helyzete lehet A nem-elfajuló kúpszelethez viszonyítva:
• sgnx⊤Ax = sgn detA, belső pont;
• sgnx⊤Ax = 0, illeszkedő pont;
• sgnx⊤Ax = −sgn detA, külső pont.
25.2. Az [x] és [y] pontot az A-ra nézve konjugáltnak nevezzük, ha
x⊤Ay = 0.
Mivel x⊤Ay = y⊤Ax, ezért a konjugáltság szimmetrikus.
25.3. Tegyük fel, hogy A egy nem elfajuló kúpszelet. Ekkor azon pontok, amelyek az [x]ponthoz konjugáltak, azok pontosan az
[Ax]′
egyenesen fekvő pontok:Biz.: [y] konj. [x] ⇔ y⊤Ax = 0 ⇔ [y] ill. [Ax]′-re.Ezt az egyenest az [x] pont polárisának nevezzük.
25.4. Tegyük fel, hogy A egy nem elfajuló kúpszelet. Ekkor az a pont, amelyik az [y]′
egyenes minden pontjához konjugált, az pontosan csak a
[A−1y]
pont.Biz.: [x] ilyen ⇔ ∀z ∈ y⊥-re x⊤Az = 0 ⇔ ∀Az ∈ (A−1y)⊥-re x⊤Az = 0 ⇔ ∀w ∈
(A−1y)⊥-re x⊤w = 0 ⇔ [x] = [A−1y].Ezt a pontot a [y]′ egyenes pólusának nevezzük.
25.5. Egy nem elfajuló kúpszeletre nézve a pólus/poláris leképezések egymás inverzei, és egydualitási viszonyt határoznak meg. (Az illeszkedéstartást könnyű ellenőrizni!)
25.6. Megjegyzés: A korábban tekintett dualitás az pont az x21 + x22 + x33 = 0 képzeteskúpszeletre való pólus-poláris képzés volt.
A gyakorlat szempontjából fontos:
25.7. Ha [x] az A kúpszelet egy pontja, akkor az [Ax] poláris az a kúpszelet adott pontbanvett érintője. (Olyan egyenes, amelyik egy pontban metszi a projektív síkon.) Az érintőpontjai mind külső pontok az érintési pont kivételével.
25.8. Megjegyzés. Az ideális egyenes pólusa a kúpszelet középpontja. Valóban, az egyolyan, a kúpszeletre jellemző pont, amelyik invariáns a kúpszeletet és az ideális egyenest fixá-ló projektív (vagyis is kúpszeletet fixáló affin) transzformációkra. A szimmetriaviszonyokbólkövetkezően nem meglepő, hogy az ellipszisre, hiperbolára ez a közönséges szimmetriaközép-pont, míg parabolára a tengelyhez tartozó ideális pont.
Nem elfajuló kúpszeletre tehát a középpontot reprezentáló vektor A−1e3.
77

25.9. Megjegyzés. (Nem kell vizsgára.) Valójában ezt a dolgot – korlátozott mérték-ben – még elfajuló kúpszeletre is ki lehet terjeszteni, ha A−1e3 helyett (adjA)e3-at ve-szünk. Ez nemelfajuló kúpszeletekre nyilván ugyanazt a pontot adja, de megvan az azelőnye, hogy elfajuló kúpszeletre is alkalmazható. (Kúpszeletek esetén A szimmetrikus ésadjA = (adjA)⊤ = A ∧ A.) Azonban még ez a definíció sem alkalmazható kettős egyene-sekre ill. párhuzamos egyenespárokra. Ez utóbbi esetekben azonban, a kettős ideális egyeneskivételével, a kúpszelet ideális pontja egy kitüntetett pont.
25.10. Megjegyzés. Az mátrixinverz (illetve az adjungált) előállításából látszik, hogy haaz A mátrix első két sora a1, a2, akkor a középpont a [a1 × a2] projektív pont lesz. (Az Aszimmetrikus mátrix, így ez az a33 adat kivételével a kúpszelet összes többi együtthatójátfelhasználja.)
25.11. (opcionális) Ha [x] konjugált [y]-hoz, nem egyenlőek, és az egyik belső pont, a másikkülső pont, akkor az őket összekötő egyenes két pontban, mondjuk [u], [v]-ben, metszi agörbét és
([x], [y], [u], [v]) = −1.
25.12. Az szokták mondani, hogy a kúpszeletet 5 adat határozza meg, de ezt többféleképpenis lehet érteni: 5 együttható (6 − 1 a skalárral szorzás miatt), vagy 5 pontja határozza meg,vagy 5 érintője, stb. Ez mind igaz, de ezek külön tételek, amelyeket külön-külön, precízenkell kimondani. Példa:
25.13. Tétel. Tegyük fel , hogy [x1, y1, z1], . . . , [x5, y5, z5] 5 különböző pont, amelyek közülsemely 4 nem esik egy egyenesre. Ekkor ezek meghatároznak pontosan egy kúpszeletet, aminekaz egyenlete [x, y, z]-ben ∣∣∣∣∣∣∣∣∣∣∣∣
x2 xy1 y2 xz yz z2
x21 x1y1 y21 x1z1 y1z1 z21x22 x2y2 y22 x2z2 y2z2 z22x23 x3y3 y23 x3z3 y3z3 z23x24 x4y4 y24 x4z4 y4z4 z24x25 x5y5 y25 x5z5 y5z5 z25
∣∣∣∣∣∣∣∣∣∣∣∣= 0.
A z = z1 = z2 = z3 = z4 = z5 = 1 választással ugyanezt affin formalizmussal kapjuk meg.
78

26. Gyakorlaton: Manipulációk kúpszeletekkel
Ideális pontok kúpszeleteken
26.1. Adott az
a11x21 + 2a12x1x2 + a22x
22 + 2a13x1x3 + 2a23x2x3 + a33x
23 = 0,
avagy – más jelölésekkel –
ax21 + bx1x2 + cx22 + dx1x3 + ex2x3 + fx23 = 0
kúpzelet. Kérdés: melyek az ideális pontjai? Vagyis a [x1, x2, x3] = [x1, x2, 0] alakú pontokatkeressúk. Ekkor x3 = 0-val
a11x21 + 2a12x1x2 + a22x
22 = 0,
illetveax21 + bx1x2 + cx22 = 0
egyeneleteket kell megoldani.Ha ez azonosan nulla, akkor minden ideális pont a kúpszelethez tartozik.Ha nem azonosan nulla, akkor 0, 1, 2 lehet a kúpszeleten lévő pontok száma. A további-
akban ez az az érdekes eset, amivel fogalalkozunk:
26.2. I. megközelítés.Először megnézzük, hogy a [1, 0, 0] pont rajta van-e a kúpszeleten. (Ez pont akkor igaz,
ha a = 0)Azután megnézzük, hogy az [x, 1, 0] alakú ideális pontok melyek jöhetnek szóba. (Ez pedig
aza11x2 + 2a12x+ a22 ≡ ax2 + bx+ c = 0,
egyenlet megoldását igényli x-re.)A.) eset, ha a = 0: Akkor [1, 0, 0] ideális kúpszeletpont. Ha b = 0, akkor [− c
b, 1, 0] egy
másik ideális pont. Röviden tehát
[1, 0, 0], [−c, b, 0]
bár a kettő egybeeshet (b = 0-ra).B.) eset, ha a = 0: Akkor [
−b±√b2 − 4ac
2a, 1, 0
](amennyiben valós) az eredmény.
26.3. II. megközelítés.Először megnézzük, hogy a [cos β, sin β, 0] alakban keressük az ideális pontot. Itt persze
egy ± előjel még mindig ugyanazt az ideális pontot adja. Kiszámolható, hogy a jó megoldá-sokat
cos β + i sin β = (cosα + i sinα)
√Γ− δ ± i
√Γ + δ
2Γ
79

adja, ahol
⟨cos 2α+, sin 2α⟩ =⟨a11 − a22
Γ,2a12Γ
⟩és
Γ ≥ |δ|
azaz A33 ≤ 0.Ekvivalens módon:
cos 2β + i sin 2β =((a11 − a22) + 2a12i)(−δ ± i
√−A33)
Γ2
Egyenesek és kúpszeletek metszéspontjai
Egyenesek és kúpszeletek viszonya
80

27. Kúpszeletek kanonikus alakra hozása, részletesen27.1. Az alábbi mennyiségek kiszámolása hasznos a kúpszeletek osztályozásánal:
∆ = detA = det
a11 a12 a13a21 a22 a23a31 a32 a33
,A33 = detA|2×2 = det
[a11 a12a21 a22
],
δ = trA|2×2 = tr
[a11 a12a21 a22
]= a11 + a22,
Γ =√(a11 − a22)2 + 4a212 =
√δ2 − 4A33.
(Ezek azért is jók, mert az egybevágóságok mátrixhatási megőrzik őket.)
A33 = 0 – centrális kúpszeletek
27.2. Ez az az eset, amikor az ideális egyenes kúpszeletre vonatkozó pólusa, [A13,A23,A33] =(adjA)[0, 0, 1]′ értelmezhető mint projektív pont, és, mi több, közönséges pont.
A kúpszelet középpontja ekkor (A13
A33
,A23
A33
).
Ezt egy eltolással bevihetjük az origóba. Ekkor:
A =
a11 a12 a13a21 a22 a23a31 a32 a33
egybev∼ P−1,⊤1 AP−1
1 = Ac =
a11 a12a21 a22
detA
A33
ahol
P1 =
1 −A13
A33
1 −A23
A33
1
, P−11 =
1
A13
A33
1A23
A33
1
.Ezután a stratégia az, hogy egy origó körüli forgatással speciális diagonális alakra lehet
hozni a kvadratikus alakot, ami már egy kanonikus alakra referál:
Ac =
a11 a12a21 a22
detA
A33
egybev∼ P−1,⊤2 AcP
−12 = Ak =
∗
∗detA
A33
.ahol
P2 =
cosα sinα− sinα cosα
1
, P−12 =
cosα − sinαsinα cosα
1
.81

Ehhez persze az α szöget kell megfelelően beállítani.Végül így
A =
a11 a12 a13a21 a22 a23a31 a32 a33
egybev∼ (P2P1)−1,⊤A(P2P1)
−1 = Ak =
∗
∗detA
A33
lesz, ahol
P−1 = (P2P1)−1 =
cosα − sinα
A13
A33
sinα cosαA23
A33
1
az (egyik) egybevágóság, amelyik a kanonikus Ak kúpszeletet átviszi az eredeti A kúp-szeletbe.
A33 = 0, detA = 0 – centrális nem-elfajuló kúpszeletek
27.3. ILyenkor
Ac =
a11 a12a21 a22
detA
A33
egybev∼ P−1,⊤2 AcP
−12 = Ak = −detA
A33
u v−1
,ahol
u, v =
− A33
detA· δ ± Γ
2
;
az u, v sorrendet mi választhatjuk meg. Az Ak kúpszelet a
ux2 + vy2 = 1
affin görbének felel meg. Az osztályozás a − A33
detA
[a11 a12a21 a22
]nem-elfajuló szimmetrikus mát-
rix típusa szerint történik.
• ha pozitív definit (u, v > 0), akkor ellipszisről beszélünk, és a szokásos választás 0 <u ≤ v;
• ha indefinit (u, v ellenkező előjelű), akkor hiperboláről beszélünk, és a szokásos választásu > 0 > v;
• ha negatív definit (u, v < 0), akkor képzetes ellipszisről beszélünk, és a szokásos választás0 > u ≥ v.
82

Főtípus: detA = 0, A33 > 0, sgn δ = −sgn detA — Ellipszis
27.4. Ilyenkor u, v elemei pozitívak, u ≤ v választandó. Így
u =−δ A33
2 detA− ΓA33
2| detA|=
(|δ| − Γ)A33
2| detA|, v =
−δ A33
2 detA+
ΓA33
2| detA|=
(|δ|+ Γ)A33
2| detA|.
Ekkor aux2 + vy2 = 1
ellipszis ax2
a2+y2
b2= 1
kanonikus alaknak felel meg, ahol
a =
√2| detA|
A33(|δ| − Γ)=
√2(|δ|+ Γ)| detA|
2A33
, b =
√2| detA|
A33(|δ|+ Γ)=
√2(|δ| − Γ)| detA|
2A33
a nagy és kis féltengelyhossz.Az α meghatározásához: Ha Γ = 0, akkor körről van szó; az α tetszőleges lehet, legegy-
szerűbb α = 0-t venni. Ha Γ > 0, akkor
(cos 2α, sin 2α) = sgn
(− A33
detA
)⟨−a11 − a22
Γ,−2a12
Γ
⟩.
Mj.:
c2 = a2 − b2 =Γ| detA|A2
33
Főtípus: detA = 0, A33 < 0 — Hiperbola
27.5. Ilyenkor u, v elemei ellenkező előjelűek, u > 0 > v választandó. Így
u =−δ A33
2 detA− ΓA33
2| detA|=
(δ′ + Γ)|A33|2| detA|
, v =−δ A33
2 detA+
ΓA33
2| detA|=
(δ′ − Γ)|A33|2| detA|
.
ahol δ′ = |δ|(sgn detA) Ekkor aux2 + vy2 = 1
hiperbola ax2
a2− y2
b2= 1
kanonikus alaknak felel meg, ahol
a =
√2| detA|
|A33|(Γ + δ′)=
√2(Γ− δ′)| detA|
2|A33|, b =
√2| detA|
|A33|(Γ− δ′)=
√2(Γ + δ′)| detA|
2|A33|
a valós és képzetes féltengelyhossz.
83

Az α meghatározásához: Ilyenkor Γ > 0, és
(cos 2α, sin 2α) = sgn
(− A33
detA
)⟨a11 − a22
Γ,2a12Γ
⟩.
Mj.:
c2 = a2 + b2 =Γ| detA|A2
33
Főtípus: detA = 0, A33 > 0, sgn δ = sgn detA — Képzetes ellipszis
27.6. Ilyenkor u, v elemei pozitívak, u ≤ v választandó. Így
u =−δ A33
2 detA+
ΓA33
2| detA|=
(−|δ|+ Γ)A33
2| detA|, v =
−δ A33
2 detA− ΓA33
2| detA|=
(−|δ| − Γ)A33
2| detA|.
Ekkor aux2 + vy2 = 1
képzetes ellipszis a
−x2
a2− y2
b2= 1
kanonikus alaknak felel meg, ahol
a =
√2| detA|
A33(|δ| − Γ)=
√2(|δ|+ Γ)| detA|
2A33
, b =
√2| detA|
A33(|δ|+ Γ)=
√2(|δ| − Γ)| detA|
2A33
a nagy és kis féltengelyhossz.Az α meghatározásához: Ha Γ = 0, akkor képzetes körről van szó; az α tetszőleges lehet,
legegyszerűbb α = 0-t venni. Ha Γ > 0, akkor
(cos 2α, sin 2α) = sgn
(− A33
detA
)⟨a11 − a22
Γ,2a12Γ
⟩.
A33 = 0, detA = 0 – centrális elfajuló kúpszeletek
27.7. Ilyenkor
Ac =
a11 a12a21 a22
0
egybev∼ P−1,⊤2 AcP
−12 = Ak = e
u v0
,ahol
u, v =
e−1 · δ ± Γ
2
;
az u, v sorrendet mi választhatjuk meg. Az Ak kúpszelet a
ux2 + vy2 = 0
affin görbének felel meg. Az osztályozás a[a11 a12a21 a22
]nem-elfajuló szimmetrikus mátrix típusa
szerint történik.
84

• ha definit (u, v azonos előjelű), akkor pontellipszisről (vagy képzetes metsző egyenespár-ról) beszélünk, és a szokásos választás szerint u ≥ v > 0, u−1 + v−1 = 1;
• ha indefinit (u, v ellenkező előjelű), akkor hiperboláről beszélünk, és a szokásos választásu > 0 > v; u ≤ |v|, u+ |v| = 1.
Főtípus: detA = 0, A33 > 0, — Pontellipszis
27.8. Ilyenkor a szokásos választásnak e =A33
δ,
u =2δ
δ + Γ=δ(δ − Γ)
2A33
, v =2δ
δ − Γ=δ(δ + Γ)
2A33
.
Ekkor aux2 + vy2 = 0
pontellipszis ax2
a2+y2
b2= 0
kanonikus alaknak felel meg, ahol
a =
√1
2
(1 +
Γ
δ
), b =
√1
2
(1− Γ
δ
).
Az α meghatározásához: Ha Γ = 0, akkor pontkörről van szó; az α tetszőleges lehet,legegyszerűbb α = 0-t venni. Ha Γ > 0, akkor
(cos 2α, sin 2α) = (sgn δ)
⟨−a11 − a22
Γ,−2a12
Γ
⟩.
Főtípus: detA = 0, A33 < 0 — Metsző egyenespár
27.9. Ilyenkor a szokásos választásnak e =−|A33|
Γ(sgn δ),
u =2Γ
Γ + |δ|=
Γ(Γ− |δ|)2|A33|
, v = − 2Γ
Γ− |δ|= −Γ(Γ + |δ|)
2|A33|.
Ekkor aux2 + vy2 = 0
pontellipszis ax2
a2− y2
b2= 0 (avagy a − b2x2 + a2y2 = 0)
kanonikus alaknak felel meg, ahol
a =
√1
2
(1 +
|δ|Γ
), b =
√1
2
(1− |δ|
Γ
).
85

Az α meghatározásához: Ha Γ = 0, akkor pontkörről van szó; az α tetszőleges lehet,legegyszerűbb α = 0-t venni. Ha Γ > 0, akkor
(cos 2α, sin 2α) = (sgn δ)
⟨a11 − a22
Γ,2a12Γ
⟩.
(A δ = 0 esetben sgn δ = −1-et is választhatunk, ami annak felel meg, hogy a merőlegesegyenespárnak van egy 90-os extra forgásszimmetriája.)
A33 = 0 – „tengelyes” kúpszeletek
27.10. A33 = 0 maga után vonja a következő azonosságok teljesülését:
∆ ≡ detA = −(a11a223 − 2a12a13a23 + a213a22).
ésΠ ≡ −δ∆ = (a11 + a22)(a11a
223 − 2a12a13a23 + a213a22) =
= A213 + A2
23 = (a23a11 − a13a12)2 + (−a13a22 + a23a12)
2.
Főtípus: A33 = 0, detA = 0 – Parabola
27.11. Ilyenkor A|2×2 = 0, de A33 = 0, így A|2×2 szükségképpen parabolikus típusú. Meg-mutatható
δ = 0,
Π = −δ∆ = A213 + A2
23 > 0,
sgn δ = −sgn∆.
Ezen azonosságok felhasználásával látható, hogy
A =
a11 a12 a13a21 a22 a23a31 a32 a33
egybev∼ P−1,⊤AP−1 = Ak =1
δ
−p1
−p
ahol
p =
√−∆
δ3=
√Π
δ2.
Ekkor
P−1 =
cosα − sinα C1
sinα cosα C2
1
, P =
cosα sinα H1
− sinα cosα H2
1
ahol
⟨cosα, sinα⟩ =⟨A13√Π,A23√Π
⟩⟨C1, C2⟩ =
⟨−a13
δ− A13
2δ2+A13(A11 + A22)
2Π,−a23
δ− A23
2δ2+A23(A11 + A22)
2Π
⟩
86

⟨H1, H2⟩ =⟨∆− δ(A11 + A22)
2δ√Π
,A13a23 − A23a13
δ√Π
⟩Mj.:
A13 = a23a12 − a13a22, A23 = a12a13 − a11a23
A11 + A22 = −a223 + a11a33 + a22a33 − a213
(Ilyen mozgás pontosan egy van, amelyik Ak egy konstansszorosába vagyis egy kanonikusparabolába viszi a parabolát.)
Főtípusok: A33 = 0, detA = 0, δ = 0 – párhuzamos egyenespárok
27.12. Ilyenkor A|2×2 parabolikus típusú.
A =
a11 a12 a13a21 a22 a23a31 a32 a33
egybev∼ P−1,⊤AP−1 = Ak =
0 δ
a33 −a213 + a223
δ
P−1 =
cosα − sinα −a13
δsinα cosα −a23
δ1
feltéve, hogy
⟨cos 2α, sin 2α⟩ = −⟨a11 − a22
δ,2a12δ
⟩teljesül.2 Mj.:
a13 cosα+ a23 sinα = 0
is ellenőrizhető.3Ebből a kanonikus alak
y2 +a33(a11 + a22)− a213 − a223
(a11 + a22)2= 0.
Mj.:A11 + A22
δ2≡ a33(a11 + a22)− a213 − a223
(a11 + a22)2.
Ha a fenti mennyiség2Az általános (δ = 0) esetben a P−1,⊤AP−1 =
=
2A33
δ0 −A13 cosα+A23 sinα
δ
0 −2A33
δ−A23 cosα−A13 sinα
δ
−A13 cosα+A23 sinα
δ−A23 cosα−A13 sinα
δ
∆− a33A33
δ2
+
0 δ
a33 −a213 + a223
δ
,
de az eltűnések miatt ez itt leegyszerősödik.3Általános esetben
(a13 cosα+ a23 sinα)⟨cosα, sinα⟩ =⟨−A13
δ,−A23
δ
⟩teljesül, de az eltűnések miatt ez is eltűnik.
87

• > 0, akkor képzetes párhuzamos egyenespárról van szó,
• = 0, akkor kettős egyenesről van szó,
• < 0, akkor valódi párhuzamos egyenespárról van szó.
Főtípus: A|2×2 = 0, (a13, a23) = 0 – valós-ideális egyenespár
27.13. (A|2×2 = 0 azzal egyenértékű, hogy A33 = 0, δ = 0, és ez maga után vonja detA = 0-tis.)
A =
0 0 a130 0 a23a13 a23 a33
egybev∼ P−1,⊤AP−1 = Ak =
√a213 + a223
0√a213 + a223
ahol
P =
a13√a213+a
223
a23√a213+a
223
a33
2√a213+a
223
− a23√a213+a
223
a13√a213+a
223
0
1
P−1 =
a13√a213+a
223
− a23√a213+a
223
− a13a332(a213+a
223)
a23√a213+a
223
a13√a213+a
223
− a23a332(a213+a
223)
1
Ez már az
x = 0
kanonikus alakot adja.
Főtípus: csak a33 = 0 – kettős ideális egyenes
27.14. Ez már eleve a 1 = 0 kanonikus alakot adja (a33-mal való szorzás erejéig.)
88

28. Kúpszeletek osztályozása (kivonat)28.1. Az alábbi mennyiségek kiszámolása hasznos a kúpszeletek osztályozásánal:
∆ = detA = det
a11 a12 a13a21 a22 a23a31 a32 a33
,A33 = detA|2×2 = det
[a11 a12a21 a22
],
δ = trA|2×2 = tr
[a11 a12a21 a22
]= a11 + a22,
Γ =√(a11 − a22)2 + 4a212 =
√δ2 − 4A33.
(Ezek azért is jók, mert az egybevágóságok mátrixhatási megőrzik őket.)
detA = 0 – nemelfajuló kúpszeletek:
28.2. Tesztelés:
• Ha detA = 0 és A33 > 0 és sgn a11 = sgn detA, akkor képzetes ellipszis.(Meggondolható, hogy a + + + ill. − + − főminordeterminánsok a pozitív definit ésnegatív definit mátrixoknak felelnek meg.)
• Ha detA = 0 és A33 > 0 és sgn a11 = −sgn detA, akkor ellipszis.
Megjegyzés: A valódi vagy képzetes ellipszis esetben sgn a11 = sgn a22 = sgn a11 + a22.
• Ha detA = 0 és A33 < 0 akkor hiperbola.A képzetes ellipszis/ ellipszis/ hiperbola esetekben a kanonikus alak
ux2 + vy2 = 1
alakú, ahol
u, v =
− A33
detA· a11 + a22 ±
√(a11 − a22)2 + 4a2122
=
− A33
detA· δ ± Γ
2
.
Ellipszis esetén 0 ≤ u ≤ v,hiperbola esetén u > 0 > v,képzetes ellipszis esetén 0 > u ≥ v kell a kanonikus alakhoz.
• Ha detA = 0 és A33 = 0 akkor parabola.A parabola esetben a kanonikus alak
y2 = 2px,
ahol
p =
√−detA
δ3.
89

detA = 0 – elfajuló kúpszeletek:
28.3. Tesztelés és kanonikus alak:
• Ha csak a33 = 0 akkor kettős ideális egyenes. Kanonikus alak:
1 = 0.
• Ha A|2×2 = 0, de a13 vagy a23 nemnulla, akkor ez egy valós-ideális egyenespár. (Az affinalak egy egyszerűen egy egyenes egyenlete.) Kanonikus alak:
x = 0.
• • • Ha A|2×2 = 0, de A33 = detA|2×2 = 0, akkor 3 eset fordulhat elő: a kúpszelet lehetpárhuzamos, kettős, vagy képzetes párhuzamos egyenespár.
Kanonikus alak:x2 +
(a11 + a22)a33 − a213 − a223(a11 + a22)2
= 0.
Ebből megállapítható, hogy melyik eset áll fenn.
• A33 = detA|2×2 > 0 egy pontellipszis.
A kanonikus egyenlet normálvaux2 + vy2 = 0
alakú, ahol
u =1
2+
1
2
Γ
|δ|, v =
1
2− 1
2
Γ
|δ|.
• A33 = detA|2×2 < 0 egy metsző egyenespár.
A kanonikus egyenlet normálvaux2 − vy2 = 0
alakú, ahol
u =1
2+
1
2
|δ|Γ, v =
1
2− 1
2
|δ|Γ.
90

29. A projektív tér
29.1. A projektív tér RP 3, hasonlóan származtatható P(R4)-ként. A pontok
[x] = [x1, x2, x3, x4]
alakúak. Ezek vagy az(x, y, z) = [x, y, z, 1]
közönséges pontoknak felelnek meg, vagy pedig
[x1, x2, x3, 0]
alakú ideális pontokként képzelhetőek el. Ezekhez megintcsak egyenesek párhuzamosságiosztályait rendelhetjük (az ⟨x1, x2, x3⟩ irányvektorú egyenesek osztályát).
29.2. RP 3-ban a projektív egyeneseket 2-dimenziós alterekből, a projektív síkokat a 3-dimenziósalterekből származtathatjuk. Ez a kapcsolat nagyon áttekinthető:
projektív pont ↔ R4 1-dimenziós altere
projektív egyenes ↔ R4 2-dimenziós altere
projektív sík ↔ R4 3-dimenziós altere
a teljes projektív tér ↔ R4 maga
29.3. A projektív teret megintcsak elképzelhetjük a T közönséges tér projektív lezártjaként:
T = T ∪ ∂T,
ahol ∂T az egyenesek párhuzamossági ekvivalenciaosztályainak a halmaza.Itt egyenesekből megint csak kétféle lehet. Vagy
l = l ∪ ∂l,
azaz egy közönséges egyenes lezártja az ideális pontjával; vagy
∂S
alakú, azaz egy síkkal párhuzamos egyenesekből adódó ideális pontok halmaza.Síkból is kétféle van, vagy egy közönséges sík
S = S ∪ ∂S
projektív lezártja, vagy a∂T
ideális sík.
29.4. Megjegyzés. A síkból síkba vetítés is igazából a projektív térben gondolható el helye-sen. Ha az S1 síkból vetítünk párhuzamosan az S2 síkra, akkor ez úgy gondolható el, hogyegy ∂T \ (∂S1 ∪ ∂S2)-beli ideális ponton át tekintünk egy perspektivitást.
91

29.5. A projektív térben hasonlóan igaz a projektív geometria alaptétele: Minden kolline-áció (= struktúra és illeszkedéstartó bijekció) egy projektivitás (= R4 nem-elfajuló lineárisleképezése által indukált bijekció) és viszont.
29.6. A projektív tér egy dualitása olyan illeszkedéstartó leképezés, amelyik egy pontnak egysíkot, és viszont, egy egyenesnek pedig egy másik egyenest, és viszont, feleltet meg.
Ilyen dualitást legegyszerűbben úgy tudunk definiálni, hogy minden W altér által indukáltalakzatnak az altér W⊥ ortogonális komplementuma által indukált alakzatot feleltetjük meg:
[W ] ↔ [W⊥].
29.7. Egy pontot legegyszerűbben négy koordinátával írhatunk (nemnulla konstanssal valószorzás erejéig):
[x] = [x1, x2, x3, x4].
Hasonlóan járhatunk el síkok esetén is:
[a]′ = [a1, a2, a3, a4]′
jelöli az[x1, x2, x3, x4] : a1x1 + a2x2 + a3x3 + a4x4 = 0
síkot. A helyzet analóg a projektív síkkal.
92

30. Egyenesek analitikus leírása a projektív térben30.1. Az egyenesek leírása viszont valamivel trükkösebb:
Az [x] és [y] pontokra illeszkedő egyenes leírására a
[x ∧ y]
kifejezést szokták használni, ahol nem lényeges, hogy ∧ igazából micsoda, hanem csak az,hogy egy antiszimmetrikus párosítást ad (mint a vektoriális szorzat).
Ha x = x1e1 + x2e2 + x3e3 + x4e4 és y = y1e1 + y2e2 + y3e3 + y4e4, akkor
x ∧ y = (x1y2 − x2y1)e1 ∧ e2 + (x3y1 − x1y3)e3 ∧ e1 + (x1y4 − x3y1)e1 ∧ e4+
+(x2y3 − x3y2)e2 ∧ e3 + (x2y4 − x4y2)e2 ∧ e4 + (x3y4 − x4y3)e3 ∧ e4.
A
p = p12e1 ∧ e2 + p31e3 ∧ e1 + p14e1 ∧ e4 + p23e2 ∧ e3 + p24e2 ∧ e4 + p34e3 ∧ e4.
által jelzett egyenesre a[p] = [p14, p24, p34, p23, p31, p12],
ún. Plücker-koordinátás jelölést is szokás használni. Itt a pij-k természtesen a Plücker-koordináták. Itt megint minden csak nemnulla konstans szorzó erejéig számít, de a koordiná-ták még ezen túl sem függetlenek, mert kielégítik a
p14p23 + p24p31 + p34p12 = 0
összefüggést.Másrészt, egy egyenest úgy is lehet képzelni, mint két sík metszésvonát. Az [z]′ és [w]′
síkot metszésvonát, mint egyenest a[z ∧w]′
kifejezéssel lehet leírni.Ha z = z1e
′1 + z2e
′2 + z3e3 + z4e
′4 és w = w1e
′1 +w2e
′2 +w3e
′3 +w4e
′4 (itt a vessző azt jelzi,
hogy síkokra gondolunk), akkor
w ∧ z = (z1w2 − z2w1)e′1 ∧ e′2 + (z3w1 − z1w3)e
′3 ∧ e′1 + (z1w4 − z3w1)e
′1 ∧ e′4+
+(z2w3 − z3w2)e′2 ∧ e′3 + (z2w4 − z4w2)e
′2 ∧ e′4 + (z3w4 − z4w3)e
′3 ∧ e′4.
Mindez végeredményben a[q14, q24, q34, q23, q31, q12]
′
(duális) Plücker-koordinátás leíráshoz vezet.Ezzel viszont már kétféle leírásunk is van. Szerencsére könnyen tudunk megfeleltetést
létesíteni a kétféle jelölés között, mivel kiderül, hogy a
[p14, p24, p34, p23, p31, p12]
Plücker-koordinátáknak a[p23, p31, p12, p14, p24, p34]
′
duális Plücker-koordináták felelnek meg. Vagyis, a duálisra való áttérés az első három és amásodik három koordináta megcserélését jelenti.
93

30.2. Tekintsük a (1, 3,−1) ponton áthaladó ⟨−1, 2,−3⟩ irányvektorú egyenest (pontosabbanannak projektív lezártját).
a.) Ez felfogható úgy, mint a [1, 3,−1, 1] és az [−1, 2,−3, 0] pontokon átmenő egyenes. Afentiek szerint ez a
[p14, p24, p34, p23, p31, p12] = [1,−2, 3,−7, 4, 5]
Plücker koordinátájú egyenest adja. A
p14p23 + p24p31 + p34p12 = 1 · (−7) + (−2) · 4 + 3 · 5 = 0
azonosság könnyen ellenőrizhető.b.) Az egyenes felfogható úgy is, mint a
2x+ y − 5 = 0 és x+ 2y + z − 6 = 0
síkok metszésvonala, vagyis a
[2, 1, 0,−5]′ és [1, 2, 1,−6]′
síkok metszésvonala. A fentiek szerint ez a
[q14, q24, q34, q23, q31, q12]′ = [−7, 4, 5, 1,−2, 3]′
duális Plücker koordinátájú egyenest adja. Ez illusztrálja azt is, hogy hogyan kell a a közön-séges ill. duális Plücker koordinátákat egymásba alakítani.
Ha az egyenest a
3x− z − 4 = 0 és x+ 2y + z − 6 = 0
vagyis a[3, 0,−1,−4]′ és [1, 2, 1,−6]′
síkok metszésvonalaként állítjuk elő, akkor a
[q14, q24, q34, q23, q31, q12]′ = [−14, 8, 10, 2,−4, 6]′
duális Plücker koordinátákat adja. Ez látszólag más, mint az előbb kapott eredmény, de való-jában ugyanaz, hisz a duális Plücker koordináták is szorozhatóak nemnulla konstans erejéig.
30.3. A fenti terminológiával a dualitás nagyon egyszerűen jellemezhető: akár pontokról/síkokról,akár egyenesekről van szó, a dualitás egy vessző le ill. felvételét jelenti.
30.4. A fentieknek megfelelően[a, b, c, 0, 0, 0]
az origón átmenő ⟨a, b, c⟩ irányvektorú egyenest jelöli, míg
[0, 0, 0, a, b, c]
az ax+ by + cz = 0 sík ideális egyenesét jelöli. Általánosan, egy nem ideális,
[v, r] = [a, b, c, x, y, z]
94
Plücker koordinátájú egyenesnél v = ⟨a, b, c⟩ az egyenes irányvektorát adja meg. Valóban ha[v, 0] = [a, b, c, 0]-ból és [r0, 1] = [x0, y0, z0, 1]-ből elkészítjük az egyenes Plücker koordinátásalakját, akkor
[v,v × r0] = [a, b, c, bz0 − cy0, cx0 − az0, ay0 − bx0]
adódik. Ha az r0 és r1-en átmenő egyenest nézzük, és az [r0, 1], [r1, 1]-ből kiindulva
[r1 − r0, r1 × r0]
adódik a Plücker-koordinátákra.Az egyenes egy, pontosabban az origóhoz legközelebb eső pontját az
r× v
|v|2
helyvektor adja meg.
95
31. Másodrendű felületek31.1. Ahogy tárgyaltuk másodrendű görbéket a (projektív) síkon, úgy lehet tárgyalni a má-sodrendű felületeket a projektív térben. Ez a tárgyalás hosszadalmasabb. Itt csak példákatmutatunk a felülettípusokra (a, b, c > 0), de az egyértelműséggel nem foglalkozunk.
• x2
a2+y2
b2+z2
c2= 1 : ellipszoid [nem elfajuló]
• x2
a2+y2
b2+z2
c2= 0 : pontellipszoid [elfajuló]
• x2
a2+y2
b2+z2
c2= −1 : képzetes ellipszoid [nem elfajuló]
• x2
a2+y2
b2− z2
c2= 1 : egyköpenyű hiperboloid [nem elfajuló]
• x2
a2+y2
b2− z2
c2= 0 : kúp [elfajuló]
• x2
a2+y2
b2− z2
c2= −1 : kétköpenyű hiperboloid [nem elfajuló]
• x2
a2+y2
b2= 2z : elliptikus paraboloid (paraboloid) [nem elfajuló]
• x2
a2− y2
b2= 2z : hiperbolikus paraboloid (nyeregfelület) [nem elfajuló]
• x2
a2+y2
b2= 1 : elliptikus henger [elfajuló]
• x2 = 2ay : parabolikus henger [elfajuló]
• x2
a2− y2
b2= 1 : hiperbolikus henger [elfajuló]
• x2
a2+y2
b2= −1 : képzetes elliptikus henger [elfajuló]
• x2
a2+y2
b2= 0 : egyenesellipszoid (v. képzetes metsző síkpár) [2× elfajuló]
• z2 = −c : képzetes párhuzamos síkpár [2× elfajuló]
• x2
a2− y2
b2= 0 : metsző síkpár [2× elfajuló]
• z = 0 : valós-ideális síkpár [2× elfajuló]
• z2 = c : párhuzamos síkpár [2× elfajuló]
• z2 = 0 : kettős sík [3× elfajuló]
96

• 1 = 0 : kettős ideális sík [3× elfajuló]
(Megjegyzés: A fenti felsorolásban az első 8 eset olyan, hogy minden koordinátát használ-tunk, „igazi” térbeli esetek; míg az többi 11 eset mind a síkbeli esetekből nyert „henger”.)
31.2. Tétel: Projektivitás erejéig a másodrendű felületek affin egyenletei a következők lehet-nek:
• x21 + x22 + x23 + x24 = 0 : projektív képzetes gömb
→ képzetes ellipszoid
• x21 + x22 + x23 − x24 = 0 : projektív gömb
→ ellipszoid, elliptikus paraboloid, kétköpenyű hiperboloid
• x21 + x22 − x23 − x24 = 0 : projektív másodrendű vonalfelület
→ hiperbolikus paraboloid, egyköpenyű hiperboloid
• x21 + x22 + x23 = 0 : projektív képzetes kúp (v. henger)
→ pontellipszoid, képzetes elliptikus henger
• x21 + x22 − x24 = 0 : projektív kúp (v. henger)
→ kúp, elliptikus, parabolikus, hiperbolikus henger
• x21 + x22 = 0 : projektív elfajuló kúp
→ egyenesellipszoid (v. képzetes metsző síkpár), képzetes párhuzamos síkpár
• x21 − x22 = 0 : projektív metsző síkpár
→ metsző síkpár, valós-ideális síkpár, párhuzamos síkpár
• x21 = 0 : projektív kettős sík
→ kettős sík, kettős ideális sík
31.3. Megjegyzés. A korábbiaknak megfelelően a „másodrendű görbe” és a „kúpszelet” ki-fejezéseket szinoním módon használtuk. De ha meggondoljuk, akkor ténylegesen egy affin síkés egy körkúp metszeteként az
• ellipszis, parabola, hiperbola, pontellipszis, metsző egyenespár, kettős egyenes
esetek állnak elő. A
• képzetes ellipszis, párhuzamos egyenespár, párhuzamos képzetes egyenespár, valós-ideálisegyenespár, kettős ideális egyenes
esetek pedig nem. De azért a továbbiakban is kúpszeleteknek hívjuk ezeket. . .
97
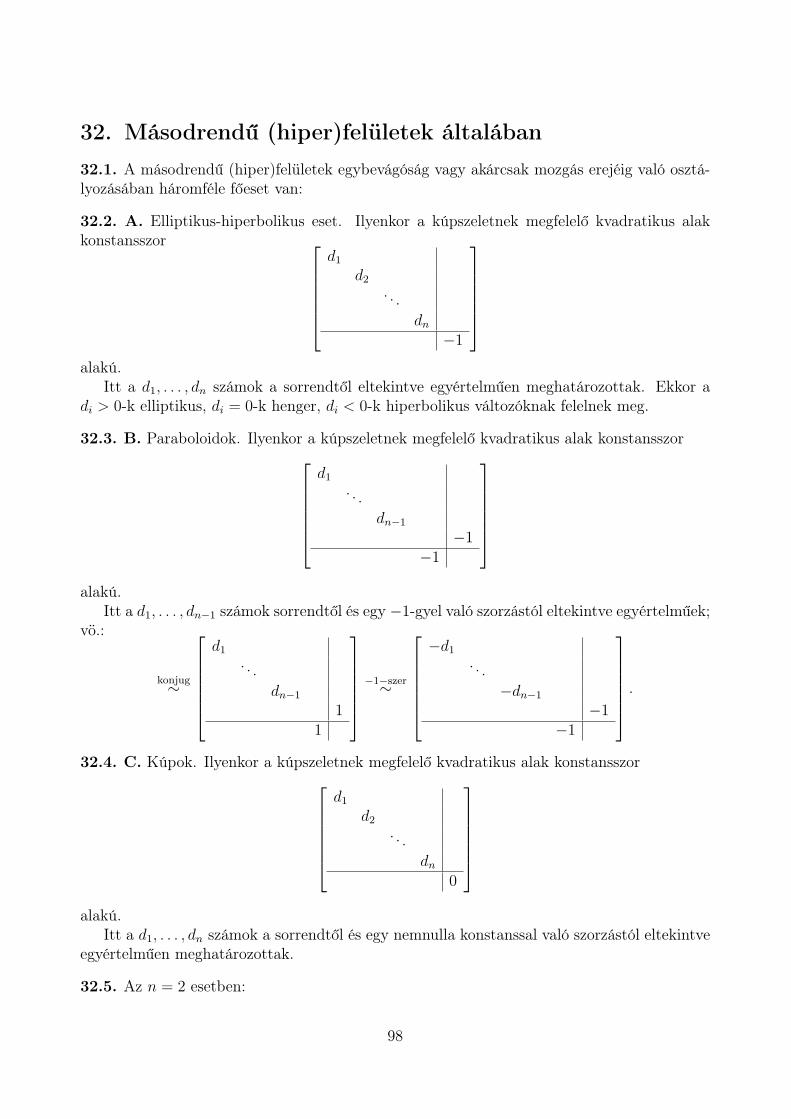
32. Másodrendű (hiper)felületek általában32.1. A másodrendű (hiper)felületek egybevágóság vagy akárcsak mozgás erejéig való osztá-lyozásában háromféle főeset van:
32.2. A. Elliptikus-hiperbolikus eset. Ilyenkor a kúpszeletnek megfelelő kvadratikus alakkonstansszor
d1d2
. . .dn
−1
alakú.
Itt a d1, . . . , dn számok a sorrendtől eltekintve egyértelműen meghatározottak. Ekkor adi > 0-k elliptikus, di = 0-k henger, di < 0-k hiperbolikus változóknak felelnek meg.
32.3. B. Paraboloidok. Ilyenkor a kúpszeletnek megfelelő kvadratikus alak konstansszord1
. . .dn−1
−1−1
alakú.
Itt a d1, . . . , dn−1 számok sorrendtől és egy −1-gyel való szorzástól eltekintve egyértelműek;vö.:
konjug∼
d1
. . .dn−1
11
−1−szer∼
−d1
. . .−dn−1
−1−1
.32.4. C. Kúpok. Ilyenkor a kúpszeletnek megfelelő kvadratikus alak konstansszor
d1d2
. . .dn
0
alakú.
Itt a d1, . . . , dn számok a sorrendtől és egy nemnulla konstanssal való szorzástól eltekintveegyértelműen meghatározottak.
32.5. Az n = 2 esetben:
98

• A.) d1 ≥ d2 > 0 ellipszis
• A.) d1 > 0 > d2 hiperbola
• A.) 0 > d1 ≥ d2 képzetes ellipszis
• A.) d1 > d2 = 0 párhuzamos egyenespár
• A.) 0 = d1 > d2 képzetes párhuzamos egyenespár
• A.) d1 = d2 = 0 kettős ideális egynes
• B.) d1 > 0 parabola
• B.) d1 = 0 valós-ideális egyenespár
• C.) d1 ≥ d2 > 0, d21 + d22 = 1 pontellipszis
• C.) d1 > 0 > d2, |d1| ≥ |d2|, d21 + d22 = 1 metsző egyenespár
• C.) d1 > 0 = d2, d21 + d22 = 1 kettős egyenes
(Azaz 11 főtípus.)
32.6. Az n = 3 esetben:
• A.) d1 ≥ d2 ≥ d3 > 0 ellipszoid
• A.) d1 ≥ d2 > 0 > d3 egyköpenyű hiperboloid
• A.) d1 > 0 > d2 ≥ d3 kétköpenyű hiperboloid
• A.) 0 > d1 ≥ d2 ≥ d3 képzetes ellipszoid
• A.) d1 ≥ d2 > d3 = 0 elliptikus henger
• A.) d1 > d2 = 0 > d3 hiperbolikus henger
• A.) d1 = 0 > d2 ≥ d3 képzetes elliptikus henger
• A.) d1 > d2 = d3 = 0 párhuzamos síkpár
• A.) d1 = d2 = 0 > d3 képzetes párhuzamos síkpár
• A.) d1 = d2 = d3 = 0 kettős ideális sík
• B.) d1 ≥ d2 > 0 elliptikus paraboloid
• B.) d1 > 0 > d2, |d1| ≥ |d2| hiperbolikus paraboloid
• B.) d1 > d2 = 0 parabolahenger
• B.) d1 = d2 = 0 valós-ideális síkpár
• C.) d1 ≥ d2 ≥ d3 > 0, d21 + d22 + d23 = 1 pontellipszoid
99

• C.) d1 ≥ d2 > 0 > d3, d21 + d22 + d23 = 1 kúp
• C.) d1 ≥ d2 > d3 = 0, d21 + d22 + d23 = 1 egyenesellipszoid
• C.) d1 > d2 = 0 > d3, |d1| ≥ |d3|, d21 + d22 + d23 = 1 metsző síkpár
• C.) d1 > d2 = d3 = 0, d21 + d22 + d23 = 1 kettős sík
(Azaz 19 főtípus.)
32.7. A kúpszeletek osztályozása azért olyan hosszadalmas a korábbi tárgyalásunkban, mertott a kanonikus alakra hozó leképezéseket is részletesen kiszámoltuk.
100

33. Baricentrikus koordináták33.1. Tegyük fel, hogy adott egy háromszög az a,b, c csúcspontokkal. Az oldalak hosszarendre a = |b− c|, b = |c− a|, c = |a− b|; a háromszög szögei α, β, γ, stb.
Ismeretes, hogy a háromszög nevezetes pontjai könnyen előállíthatók az a,b, c pontok affinkombinációiként:
i.) A súlypont:
S =a+ b+ c
3.
ii.) A beírt kör középpontja:
B =aa+ bb+ cc
a+ b+ c=
sinαa+ sin βb+ sin γc
sinα + sin β + sin γ.
iii.) A körülírt kör középpontja:
O =sin 2αa+ sin 2βb+ sin 2γc
sin 2α + sin 2β + sin 2γ=a2(b2 + c2 − a2)
16T 2a+
b2(c2 + a2 − b2)
16T 2b+
c2(a2 + b2 − c2)
16T 2c.
iv.) A magasságpont:
M =tgαa+ tg βb+ tg γc
tgα + tg β + tg γ=a4 − (b2 − c2)2
16T 2a+
b4 − (c2 − a2)2
16T 2b+
c4 − (a2 − b2)2
16T 2c
= ctg β ctg γa+ ctg γ ctgαb+ ctgα ctg βc.
(Ha valamelyik tangens végtelen [derékszög], pl. tgα = ∞, akkor a ∞∞ = 1 konvenció alapján
M = a. Hasonlóan kell eljárni, ha egy másik szög a derékszög. Az nem fordulhat elő, hogy atangensek összege 0 legyen, mert háromszögekben érvényes a tgα+tg β+tg γ = tgα tg β tg γazonosság.)
Stb.
33.2. Általánosabban: A háromszög síkjában minden p pont (helyvektor) egyértelműen állelő
p = t1a+ t2b+ t3c
alakban, aholt1 + t2 + t3 = 1.
[Ábra: A háromszög oldalai 7 részre vágják a síkot, ezen tartományokban a ti-k előjele.]Ilyenkor mondjuk, hogy a p pont a t1, t2, t3 baricentrikus koordinátákkal jellemezhető, és
jelölésselp = (t1, t2, t3)b .
33.3. Egy síkbeli v eltolásvektor („két pont különbsége”) viszont egyértelműen áll elő
v = t1a+ t2b+ t3c
alakban, aholt1 + t2 + t3 = 0.
Ilyenkor mondjuk, hogy a v vektor a t1, t2, t3 baricentrikus koordinátákkal jellemezhető,és jelöléssel
v = ⟨t1, t2, t3⟩b .
101

33.4. [Ábra: Egy külső pontból húzunk a,b, c helyvektorokat a háromszög csúcspontjaihoz.]Itt tulajdonképpen minden nemnulla t1a+t2b+t3c kombinációból képezhetünk egy síkbeli
pontot, a síknak az a pontját, ami az adott vektor irányában van. Ha t1 + t2 + t3 = 0, akkorez a
[t1, t2, t3]b =
(t1
t1 + t2 + t3,
t2t1 + t2 + t3
,t3
t1 + t2 + t3
)b
=t1a+ t2b+ t3c
t1 + t2 + t3
pont.Ha t1 + t2 + t3 = 0, akkor t1a+ t2b+ t3c párhuzamos lesz a síkkal, és
[t1, t2, t3]b
egy ideális pontot kijelölni a síkon, méghozzá, a ⟨t1, t2, t3⟩b iránnyal párhuzamos egyenesekideális pontját.
Ezek a projektív baricentrikus koordináták.Voltaképpen ez egy, az a,b, c bázisra épülő, teljesen szokásos projektív sík konstrukció /
leírás.
33.5. A projektív jelölés időnként jóval kényelmesebb, pl.:
B =
(a
a+ b+ c,
b
a+ b+ c,
c
a+ b+ c
)b
= [a, b, c]b
S =
(1
3,1
3,1
3
)b
= [1, 1, 1]b.
33.6. A háromszög oldalhosszainak a felhasználásával a metrikus struktúra rekonstruálható:az ⟨x1, x2, x3⟩b és ⟨y1, y2, y3⟩b eltolásvektorok skaláris szorzatára:
⟨x1, x2, x3⟩b · ⟨y1, y2, y3⟩b =b2 + c2 − a2
2x1y1 +
c2 + a2 − b2
2x2y2 +
a2 + b2 − c2
2x3y3.
(Ezt elegendő ellenőrizni az ⟨−1, 1, 0⟩, ⟨−1, 0, 1⟩ vektorokból alkotott párokra.)
33.7. Egyenesek leírására a [a1, a2, a3]′b jelölés használható; ezen egyenes pontjai azok a
[x1, x2, x3]b pontok, amelyekre
a1x1 + a2x2 + a3x3 = 0.
A szokásos módszerek, illeszkedési kritériumok, stb. használhatóak.
33.8. Megjegyzés: Ilyenkor [1, 1, 1]′b a sík ideális egyenese.
(Háromszögek nevezetes pontjaival való számolásra nagyon jól használhatóak a baricent-rikus koordináták.)
102

34. Differenciálgeometria: görbék, alapok
34.1. Egy Rn-beli folytonos görbén egy γ : I → Rn folytonos függvényt értünk. Itt I egyesetleg végtelen intervallum. A γ(I) = γ(t) : t ∈ I ponthalmazt a γ trajektóriájánaknevezzük. Számunkra az n = 2 (síkgörbe) és n = 3 (térgörbe) esetek lesznek a fontosak.
Általában γ(t) = (x(t), y(t), z(t))-t írunk. Deriválni a szokásos módon, komponensenkénttudunk, γ(t) = ⟨x(t), y(t), z(t)⟩ Mi a továbbiakban elsősorban differenciálható γ görbékkelfoglalkozunk. Az mondjuk, hogy a görbe reguláris ha γ(t) = 0 minden t ∈ I-re. Gyakranelég, ha szakaszonként differenciálható, stb. görbékkel foglalkozunk.
34.2. Ha γ : I → Rn egy görbe, akkor a görbe ívhossza alatt a görbe összes felosztásáhoztartozó beírt töröttvonalak hosszának a szuprémumát értjük.
L(γ) = sup
s−1∑k=0
||γ(tk+1)− γ(tk)|| : t0 ≤ t1 ≤ t2 ≤ . . . ≤ ts, ti ∈ I
.
A görbét rektifikálhatónak mondjuk, ha az ívhossz minden zárt intervallumon véges.
34.3. Emlék analízisből: A γ görbe változása
dγ(t) = γ(t) dt = ⟨x(t), y(t), z(t)⟩ dt = x(t) dt i+ y(t) dt j+ z(t) dtk.
Az analízis alaptétele: A kis változásokat összeadva a teljes változást kapjuk meg:∫ b
t=a
dγ(t) =
∫ b
t=a
γ(t) dt = γ(b)− γ(a).
Ez így heurisztikus, de persze precízen is kimondható. Itt az a lényeg, hogy ha jobbra-balramegyünk, akkor ezek egymást kioltják. De ha az összes mozgásra vagyok kíváncsi, akkor∫ b
t=a
||dγ(t)|| =∫ b
t=a
||γ(t)|| dt =∫ b
t=a
√x(t)2 + y(t)2 + z(t)2 dt = L(γ|[a,b])
intuitív alapon. Ezt is be lehet bizonyítani tételként:
34.4. Tétel. Ha γ szakaszonként differenciálható görbe, akkor
L(γ) =
∫I
||γ(t)|| dt.
34.5. Időnként a görbéket át szokás paraméterezni
Iϕ
--
γ
???
????
????
????
? Iψ=ϕ−1
mm
γ
Rn
Itt ϕ és ψ egymást inverze kell hogy legyen, és szigorúan monotonak. Ekkor γ = γ ψ a γátparaméterése. Ilyenkor persze γ = γ ϕ is a γ átparaméterése.
Itt leginkább mégis olyanokat szoktunk tekinteni, hogy ϕ, ψ = ϕ−1 differenciálható. Ekkorγ differenciálható pontosan akkor, ha γ differenciálható.
103

34.6. A geometriailag lényeges fogalmak azok, amelyek nem nagyon függenek az átparamé-terezésektől. (Ha a görbén váló végigjárás irányától függ akkor az még OK, de adott irányonbelül már ne függjön a paraméterezéstől.) Az ívhossz ilyen, mert csak a görbén indukáltrendezéstől függ, és még csak az sem számít, ha a rendezést megfordítjuk.
Nagyon hasznosak azok a paraméterezések, ahol egy
s(t) =
∫t
||γ(τ)|| dτ
primitív függvény szerint paraméterezünk át. Ilyenkor két pont paraméterének a különségepontosan a köztük levő görbedarab hosszával egyenlő.
Ez nagyon meghatározzza az ilyen jellegű paraméterezéseket, mert csak a kiindulóponttalvariálhatunk, meg azzal hogy melyik irányba növekszik meg csökken. Így a többi ívhossz-paraméterezés
S(t) = S(t) + c
ésS(t) = c− S(t)
alakú. A másodiknál viszont más az irányítás. (Ezt most nem definiáljuk.)
34.7. Ha T = S−1, akkor az átparaméterezett görbe
γ = γ T.
Ekkor s ∈ I = S(I)-re
ˆγ(s) =dγ(s)
ds=dγ T (s)
ds=dγ(t)
dt
∣∣∣∣t=T (s)
dT (s)
ds=dγ(t)
dt
∣∣∣∣t=T (s)
(dS(t)
dt
∣∣∣∣t=T (s)
)−1
= γ(T (s))S(T (s))−1 = γ(T (s))||γ(T (s))||−1.
Vagyis az átparaméterezésben az új derivált az eredetiből képzett egységvektor. Ha ellentétesirányítást veszünk, akkor az irány persze átellenes lesz.
34.8. Ha γ differenciálható görbe, akkor v(t) = ||γ(t)|| görbe sebessége. Az ívhosszparametrizációbana sebesség mindig 1.
34.9. Ha γ reguláris, akkor az egységérintővektor a
T(t) =γ(t)
||γ(t)||=γ(t)
v(t)
vektor.Az érintő vektor ilyenkor a t0 pontban a
u 7→ γ(t0) + uT(t0)
egyenes. Az egyenes nyilván nem függ a differenciálható átparaméterezéstől.Az görbe érintőjét lehet úgy is definiálni úgy, hogy nem kívánjuk meg a regularitást, hanem
azt mondjuk, hogy az az érintő, amit egy reguláris átparaméterezésnél kapunk. Ilyenkor meg
104

lehet mutatni, hogy itt nem számít hogy milyen reguláris paraméterezést választunk mertaz ívhossz-paraméterezés úgyis leleplez mindent, ha van lokálisan reguláris átparaméterezés.Még általánosabban, az érintőt lehet definiálni speciális, a görbe pontjaira illeszkedő egyenesekspeciális limeszeként.
Még be kellene látni, hogy pl. kúpszeletek esetén a geometriai és az analitikus érintőfo-galmak egybeesnek, de ez persze igaz.
105

35. Frenet-bázis síkbanSík- és térgörbékhez speciális bázisokat rendelhetünk megfelelő körülmények között.
35.1. Síkban, ha γ differenciálható, reguláris, akkor
γ(t)
vektort normalizáljuk, és kiegészítjük egy szokásos irányítású ortonormált bázissá: Így kapjuka
T(t) =γ(t)
||γ(t)||érintő és
N(t) = T(t)
normális vektorokat. Itt ⟨a, b⟩ = ⟨−b, a⟩, ahol a 90-os balra (pozitív irányba) való elfor-gatást jelenti.
35.2. A Frenet-bázis egy mozgó bázis, és a korábbiak szerint így a változása:
[T N
]=[T N
] [0 −ωω 0
]alakú. (Innentől kezdve feltesszük, hogy a görbe kétszer deriválható.) Mivel v = 0, ezértω = κv-nek választható, ahol κ-t így definiáljuk. Ezek alapján az érvényes, hogy:
T = κvN
N = −κvT
Ezek a Frenet-formulák síkban. (Itt minden függ t-től.)
35.3. Ha κ = 0, akkor a görbe (t-től függő) görbületi sugarát a
ρ(t) =1
|κ(t)|;
a görbe (t-től függő) görbületi középpontját
σ(t) = γ(t) + ρ(t)N(t) = γ(t) +1
κ(t)N(t)
formulával definiálhatjuk.A t időponthoz, avagy kollokviálisabban: a γ(t) ponthoz tartozó simulókörnek a σ(t)
középpontú, ρ(t) sugaraú kört nevezzük.A görbületi középpontok σ(t) görbéjét a γ(t) görbe evolútájának nevezik.
35.4. Megmutatható, hogy a γ görbéhez a γ(t) pontban legjobban illeszkedő kör vagy egyenes(a körök és egyensek halmazának az uniójából)
• a simulókör, ha κ = 0;
106

• az érintőegyenes, ha κ = 0.
35.5. Tétel. Az előbbiek alapján már várható: A Frenet-bázis jól viselkedik átparamétere-zésre és áthelyezésre nézve:
Ha γ = γT egy átparaméterett görbe monoton növő ("irányítástartó") átparaméterezésrenézve, akkor a új Frenet bázisra vonatkozóan a
γ(S(t)) = γ(t)
pontbanT(S(t)) = T(t), N(S(t)) = N(t), κ(S(t)) = κ(t).
Ha γ = γ T egy átparaméterett görbe mononton csökkenő ("irányításváltó") átparamé-terezésre nézve, akkor a új Frenet bázisra vonatkozóan a
γ(S(t)) = γ(t)
pontbanT(S(t)) = −T(t), N(S(t)) = −N(t), κ(S(t)) = −κ(t).
Ha A egy irányítástartó egybevágóság és γ = Aγ az áthelyezett görbe, akkor a új Frenetbázisra vonatkozóan
T(t) = AT(t), N(t) = AN(t), κ(t) = κ(t).
Ha A egy irányításváló egybevágóság és γ = Aγ az áthelyezett görbe, akkor a új Frenetbázisra vonatkozóan
T(t) = AT(t), N(t) = −AN(t), κ(t) = −κ(t).
35.6. A Frenet formulákból a deriváltak:
γ = vT,
γ = vT+ v2κN.
Speciálisan, a Taylor-formula szerint
γ(t+ ε) = γ(t) + vTε+ (vT+ v2κN)ε2
2+ o(ε2).
35.7. Praktikusan, a kiszámolást illetően:
γ = (x, y)
eseténγ = (x, y)
v =√x2 + y2
v2 = x2 + y2
107

T =γ(t)
||γ(t)|=
(x, y)
v
N = T =(−y, x)v
κ =1
vT ·N =
xy − yx
v3
ρ =v3
|xy − yx|
σ = γ +1
κN = (x, y) +
x2 + y2
xy − yx(−y, x)
35.8. További nézőpont: HaT(t) = (cosα(t), sinα(t)),
vagyis α az érintő vektor irányát mutatja, akkor
N(t) = (− sinα(t), cosα(t)),
T(t) = (−α(t) sinα(t), α(t) cosα(t)),
κ(t) =1
v(t)T(t) ·N(t) =
α(t)
v(t).
Speciálisan, ívhossz parametrizáció esetén, amikor v = 1,
κ(t) = α(t),
vagyis a görbület az irány megváltozását írja le.Ez jól mutatja, hogy κ > 0, ha a görbe balra (pozitív irányba) fordul; míg κ < 0, ha a
görbe jobbra (negatív irányba) fordul.
35.9. (Nem kell vizsgára.) Az affin értelemben vett Frenet-bázisra
[T N γ
]=[T N γ
] 0 −vκ vvκ 0 00 0 0
,ahol κ = 0 esetén
=[T N γ
] 0 0 v0 0 00 0 0
,míg κ = 0 esetén
=[T N γ
] 1 0 00 1 1
κ0 0 1
0 −vκ 0vκ 0 00 0 0
1 0 00 1 − 1
κ0 0 1
írható.
Ez azt jelenti, hogy κ = 0 esetén az affin Frenet-bázis mozgása egyszerűen csak egy v
sebességű, T irányú infinitezimális eltolásnak felel meg, míg κ = 0 esetén egy γ+1
κN körüli,
vκ szögsebességű infinitezimális elforgatásnak felel meg.
108

36. Frenet-bázis térben36.1. Térben, ha a görbe kétszer differenciálható, akkor és
γ(t), γ(t)
lineárisan függetlenek (úgy mondjuk: γ általános típusú), akkor Gram-Schmidt ortonormali-záljuk őket, és kiegészítjük őket szokásos irányítású bázissá.
Így, a Gram-Schmidt ortonormalizáció szabályai szerint kapjuk a
T(t) =γ(t)
|γ(t)|
érintő, és
N(t) =
γ(t)− γ(t)γ(t)
|γ(t)|2γ(t)∣∣∣∣γ(t)− γ(t)γ(t)
|γ(t)|2γ(t)
∣∣∣∣főnormális, és
B(t) =γ(t)× γ(t)
|γ(t)× γ(t)|binormális vektorokat. Bár a főnormális vektort ilyenkor már egyszerűbb
N(t) = B(t)×T(t)
alapján számolni.
36.2. Lemma.
N(t) =T(t)
|T(t)|.
Bizonyítás.
T(t) =γ(t)
v(t)
lederiválásávalT(t) =
1
v(t)γ(t)− v(t)
v(t)2γ(t). (I)
MásrésztT(t) ·T(t) = 1
miatt2T(t) ·T(t) = 0
és így 12v(t)-vel szorozva
T(t) · γ(t) = 0. (II)
Ekkor (I) szerint T(t) az γ(t) és γ(t) olyan lineáris kombinációja, ahol az utóbbi pozitívegyüthatóval szerepel, és (II) szerint T(t) merőleges γ(t)-re. Így (I) és (II) mutatja, hogy T(t)a γ(t) normalizálatlan Gram-Schmidt-ortogonalizáltja, és így a formulával megadott N(t) anormalizált.
109

36.3. A fenti lemma alapján szintén számollhatjuk a
T(t) =γ(t)
|γ(t)|
érintő, és
N(t) =T(t)
|T(t)|főnormális, és
B(t) = T(t)×N(t)
binormális vektorokat.
36.4. Az ortonormált bázis változása a korábbiak szerint
[T N B
]=[T N B
] 0 −ω −ηω 0 −ξη ξ 0
alakú. Könnyen látható, hogy a definíció speciális volta miatt η = 0. Valóban,a korábbanlevezetett (I) képlet szerint T már γ, γ-ból lineárisan kikombinálható, tehát már T, N -bőlkikombinálható; nincs B-re szükség.
Másrészt ω = vκ, ξ = vτ választható, ahol κ, τ -t úgy definiáljuk, hogy ez igaz legyen.Ekkor [
T N B]=[T N B
] 0 −vκ 0vκ 0 −vτ0 vτ 0
Kifejtve, kapjuk a 3-dimenziós Frenet-formulákat:
36.5. Tétel.T = vκN
N = −vκT+ vτB
B = −vτN
(Természetesen minden tag függ t-től.) κ(t) neve: görbület; τ(t) neve: torzió.
Nyilván demonstrálandó, hogy a fent bevezetett fogalmak geometrialag relevánsak (azazlényegében invariánsak):
36.6. Tétel. A Frenet-bázis / görbület és torzió jól viselkedik átparaméterezés és áthelyezésrenézve:
Ha γ = γ T egy átparaméterett görbe mononton növő ("irányítástartó") átparamétere-zésre nézve, akkor a új Frenet bázisra vonatkozóan a
γ(S(t)) = γ(t)
pontbanT(S(t)) = T(t), N(S(t)) = N(t), B(S(t)) = B(t),
110

κ(S(t)) = κ(t), τ(S(t)) = τ(t).
Ha γ = γ T egy átparaméterett görbe monoton csökkenő ("irányításváltó") átparaméte-rezésre nézve, akkor a új Frenet bázisra vonatkozóan a
γ(S(t)) = γ(t)
pontbanT(S(t)) = −T(t), N(S(t)) = N(t), B(S(t)) = −B(t),
κ(S(t)) = κ(t), τ(S(t)) = τ(t).
Ha A egy irányítástartó egybevágóság és γ = Aγ az áthelyezett görbe, akkor a új Frenetbázisra vonatkozóan
T(t) = AT(t), N(t) = AN(t), B(t) = AB(t),
κ(t) = κ(t), τ(t) = τ(t).
Ha A egy irányításváló egybevágóság és γ = Aγ az áthelyezett görbe, akkor a új Frenetbázisra vonatkozóan
T(t) = AT(t), N(t) = AN(t), B(t) = −AB(t),
κ(t) = κ(t), τ(t) = −τ(t).
36.7. A Frenet-formulák alapján a deriváltakra:
γ = vT,
γ = vT+ v2κN,...γ = (v − v3κ2)T+ (vvκ + (v2κ))N+ v3κτB.
Ezek alapján:γ × γ = v3κB,
(γ × γ) ·...γ = v6κ2τ.
Amiből viszont (B = γ×γ∥γ×γ∥ -t figyelembe véve) a
κ =||γ × γ||||γ||3
,
τ =(γ, γ,
...γ )
||γ × γ||2.
praktikus kiszámolási formulák adódnak.
111

36.8. Az imént mindent általános típusú, háromszor deriválható (γ, γ,...γ léteznek és γ×γ = 0)
görbékre definiáltunk.De ha alaposabban megnézzük a formulákat, akkor látjuk, hogy térben
κ,T
definiálásához γ(t) = 0 elég, deτ,N,B
definiálásához már γ(t)× γ(t) = 0 kell. (Ezek lényegében a geometriai feltételek.)Ha a szükséges deriváltak számát nézzük, akkor
T
definíciójához γ,κ,N,B
definíciójához γ,τ
definíciójához már...γ is kellett. (Ezek lényegében az analitikus feltételek.)
Végső soronT / κ / N,B / τ
definiálásához egyre erősebb feltételekre van szükség.
36.9. A γ(t)-n áthaladó T(t) és N(t) által generált (vagyis B(t) normálvektorú) sík: a simu-lósík. [Ebben van a simulósík.]
A γ(t)-n áthaladó N(t) és B(t) által generált (vagyis T(t) normálvektorú) sík: a normálsík.[Ez merőleges a görbére.]
A γ(t)-n áthaladó B(t) és T(t) által generált (vagyis N(t) normálvektorú) sík: a rektifi-kálósík. [Erre „fekszik fel” a görbe.]
36.10. Általános típusú görbénél κ > 0. A görbületi sugár:
ρ =1
κ
A görbületi középpont:
σ = γ +1
κN.
A simulókör az a simulósíkban fekvő σ középpontú ρ sugarú sík. Ennek hasonlóan opti-mális simulótulajdonsága van mint két dimenzióban.
36.11. A Taylor formula alapján
γ(t+ ε) = (vε+ vε2
2+ (v − v3κ2)
ε3
6)T+ (v2κ
ε2
2+ (vvκ + (v2κ))
ε3
6)N+ v3κτ
ε3
6B+ o(ε3).
Ezt a formulát fel lehet használni a Frenet adatok invariáns karakterizációjára: T,N,B aprimer, szekunder, tercier növekedési irányok, κ és τ pedig a megfelelően normált korrelációk.
112

36.12. Megjegyzendő, hogy bár a formulák hasonlóak, a sík és tér esetében definiált N nor-málvektorok és κ görbületek definíció szerint lényegileg különböznek.
Ez megmutatkozik akkor pl. ha az xy-síkban egy görbe, amelyet tekinthetek síkgörbekéntés térgörbeként is. Síkgörbeként
Nsík = T,
vagyis a normálvektor az mindig a T bal oldalára mutat. κsík előjele viszont változhat attólfüggően, hogy „erősen” jobbra (κsík < 0) vagy „erősen” balra (κsík > 0) kanyarodik a görbe,esetleg inflexiós jellegű (κsík = 0), amikor is jobbra is meg balra is kanyarodhat, vagy máshogyis viselkedhet, de gyengébben mint másodrendben.
Ha térgörbeként tekintünk rá, akkor viszont
Ntér =T
|T|=
vκsíkNsík
|vκsíkNsík|= (sgnκsík)Nsík.
Ez mutatja, hogy κsík = 0 sík esetén Ntér nem is definiált, a görbe nem lesz általános helyzetű,míg κsík = 0 esetén Ntér jóldefiniált, és mindig a "kanyarba befelé" mutat. A görbületreviszont,
κtér = |κsík|
lesz.
113

Geometriai interpretáció és a kontans Frenet-mátrix eset
(Nem kell vizsgára.)
36.13. Az affin Frenet-bázisra
[T N B γ
]=[T N B γ
] 0 −vκ 0 vvκ 0 −vτ 00 vτ 0 00 0 0 0
,ami úgy is írható (a κ > 0 esetben), hogy
=[T N B γ
]
κ√κ2 + τ 2
0τ√
κ2 + τ 20
0 1 0κ
κ2 + τ 2−τ√κ2 + τ 2
0κ√
κ2 + τ 20
0 0 0 1
0 −v√κ2 + τ 2 0 0
v√κ2 + τ 2 0 0 0
0 0 0 vτ√
κ2 + τ 2
0 0 0 0
κ√κ2 + τ 2
0−τ√
κ2 + τ 20
0 1 0 − κκ2 + τ 2
τ√κ2 + τ 2
0κ√
κ2 + τ 20
0 0 0 1
.
Egy ez olyan infinitezimális forgatva eltolás, melynek a tengelye a γ+κ
κ2 + τ 2N ponton átme-
nő,κB+ τT√κ2 + τ 2
irányú egyenes, úgy, hogy az irányába infinitezimálisan vτ√
κ2 + τ 2sebességgel
tolunk el, és körülötte v√κ2 + τ 2 szögsebességgel forgatunk el.
36.14. Abban az esetben, ha κ, τ , v kontans, akkor
[T(t) N(t) B(t) γ(t)
]=[T(0) N(0) B(0) γ(0)
]exp
t
0 −vκ 0 vvκ 0 −vτ 00 vτ 0 00 0 0 0
,
114
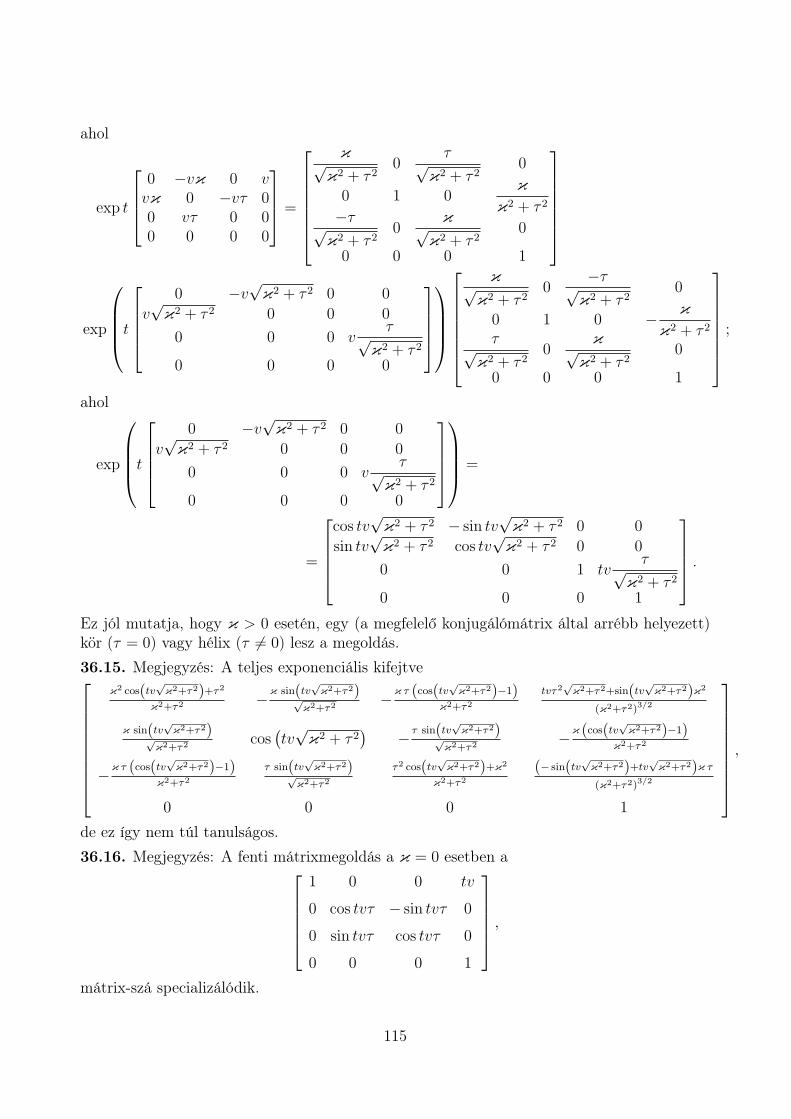
ahol
exp t
0 −vκ 0 vvκ 0 −vτ 00 vτ 0 00 0 0 0
=
κ√κ2 + τ 2
0τ√
κ2 + τ 20
0 1 0κ
κ2 + τ 2−τ√κ2 + τ 2
0κ√
κ2 + τ 20
0 0 0 1
exp
t
0 −v√κ2 + τ 2 0 0
v√κ2 + τ 2 0 0 0
0 0 0 vτ√
κ2 + τ 2
0 0 0 0
κ√κ2 + τ 2
0−τ√
κ2 + τ 20
0 1 0 − κκ2 + τ 2
τ√κ2 + τ 2
0κ√
κ2 + τ 20
0 0 0 1
;
ahol
exp
t
0 −v√κ2 + τ 2 0 0
v√κ2 + τ 2 0 0 0
0 0 0 vτ√
κ2 + τ 2
0 0 0 0
=
=
cos tv
√κ2 + τ 2 − sin tv
√κ2 + τ 2 0 0
sin tv√κ2 + τ 2 cos tv
√κ2 + τ 2 0 0
0 0 1 tvτ√
κ2 + τ 2
0 0 0 1
.Ez jól mutatja, hogy κ > 0 esetén, egy (a megfelelő konjugálómátrix által arrébb helyezett)kör (τ = 0) vagy hélix (τ = 0) lesz a megoldás.36.15. Megjegyzés: A teljes exponenciális kifejtve
κ2 cos(tv√κ2+τ2)+τ2
κ2+τ2−κ sin(tv
√κ2+τ2)√
κ2+τ2−κ τ (cos(tv
√κ2+τ2)−1)
κ2+τ2tvτ2
√κ2+τ2+sin(tv
√κ2+τ2)κ2
(κ2+τ2)3/2
κ sin(tv√κ2+τ2)√
κ2+τ2cos(tv√κ2 + τ 2
)− τ sin(tv
√κ2+τ2)√
κ2+τ2−κ (cos(tv
√κ2+τ2)−1)
κ2+τ2
−κ τ (cos(tv√κ2+τ2)−1)
κ2+τ2τ sin(tv
√κ2+τ2)√
κ2+τ2
τ2 cos(tv√κ2+τ2)+κ2
κ2+τ2(− sin(tv
√κ2+τ2)+tv
√κ2+τ2)κ τ
(κ2+τ2)3/2
0 0 0 1
,
de ez így nem túl tanulságos.36.16. Megjegyzés: A fenti mátrixmegoldás a κ = 0 esetben a
1 0 0 tv
0 cos tvτ − sin tvτ 0
0 sin tvτ cos tvτ 0
0 0 0 1
,mátrix-szá specializálódik.
115

37. Felületek37.1. Felületek paraméteres leírására az analízisből jól ismert f : Ω ⊂ R2
(u,v) → R3(x,y,z) alakú
paraméterezéseket használjuk. [Ábra!] u = u0 és v = v0 paramétervonalak.
37.2. Érintősík a r(u0, v0) pontban: A ru(u0, v0) és rv(u0, v0) vektorok által kifeszített r(u0, v0)-ra illeszkedő sík, – feltéve, hogy ezek a lineárisan függetlenek, ami egy standard feltevés.
Valójában ru(u0, v0) a v = v0 paramétervonal érintővektora az r(u0, v0)-ban, míg rv(u0, v0)az u = u0 paramétervonal érintővektora az r(u0, v0)-ban. Az a feltevés, hogy ru(u0, v0) ésrv(u0, v0) vektorok függetlenek azt jelenti, hogy a paramétervonalak regulárisak, és nemnullaszögben metszik egymást. Néha megengedjük, hogy „kevés számú” pontban sérüljön ez a fel-tevés, de általában megköveteljük. Hasonlóan, a felületet szeretjük egyrétűen paraméterezni,de ez nem mindig sikerülhet.
37.3. Példa. Ar : [0, 2π]× [0, π] → R3
(θ, ϕ) → (a cos θ sinϕ, a cos θ sinϕ, a cosϕ)
(a > 0) paraméterezett felület az a gömböt paraméterezi.a.) Az rθ, rϕ vektorrendszer elfajuló a ϕ = 0, π értékeknél.b.) A paraméterezés lényegében egyrétű, kivéve a ϕ = 0, π, és a θ = 0, 2π kritikus
értékeknél.Mivel azonban a rossz viselkedés „a felület szempontjából” „nullmértékű”, ezért ez nem
nagyon zavar minket.
37.4. Az felület r(u0, v0) pontbeli normálvektora
N(u0, v0) =ru(u0, v0)× rv(u0, v0)
|ru(u0, v0)× rv(u0, v0)|.
Ez nyilván pont az érintősík normálvektora.A p = r(u0, v0) jelöléssel (némi kollokvializmussal) a p pontból kiinduló érintővektorok
tereTpr = v : vN(u0, v0) = 0 = c1ru(u0, v0) + c2ru(u0, v0) : c1, c2 ∈ R.
37.5. Ha a görbe felületét nézzük, akkor infinitezimálisan ezt úgy lehet megközelíteni, minthahogy (ru(u0, v0) du) × (rv(u0, v0) dv) pikkelyekből lenne összetéve. Egy ilyen területe pedig∥ru(u0, v0)× rv(u0, v0)∥ du dv. Így a teljes felszín:
A =
∫∫Ω
∥ru × rv∥ du dv.
37.6. Az I első alapforma a szokásos skaláris szorzat megszorítása az érintőtér irányvektoraira.Az ru, rv bázisban a skaláris szorzat mátrixa:
G =
[g11 g12g21 g22
]=
[ruru rurvrvru rvrv
]=
[E FF G
].
A G-ben szereplő számok az első főmennyiségek, vagy elsőrendű Gauss főmennyiségek , vagymetrikus alaptenzor.
116

A mátrix azt jelenti, hogy v = c1ru + c2rv,w = c1ru + c2rv esetén
I(v,w) = v ·w =
[c1c2
]⊤ [ruru rurvrvru rvrv
] [c1c2
]= w⊤
érintőbázisGvérintőbázis.
37.7. Megjegyzés. A felszínelem a G determinánsával van kapcsolatban:
|ru × rv| =√r2ur
2v − (rurv)2 =
√detG =
√EG− F 2
37.8. A második alapforma leírása: Először megadjuk a mátrixát:
B =
[b11 b12b21 b22
]=
[ruuN ruvNruvN rvvN
]=
[L MM N
].
Így a második alapforma
II(v,w) =
[c1c2
]⊤ [b11 b12b21 b22
] [c1c2
]= w⊤
érintőbázisGvérintőbázis.
(Formálisan ez a u, v → r(u, v)N(u0, v0) függvény Hesse-formája az (u, v) = (u0, v0) pontban.)Az, hogy ennek mi a szemléletes jelentése, az már körülményesebb: Nyilván
riN = 0.
A fenti formulát lederiválvarijN = −riNj
adódik. (Itt az indexek parciális deriváltakat jelentenek.) Mindkét alak a felület a pöndörö-désére utal: Például b11 > 0 arra utal, hogy u-ban elmozdulva N az ru-val ellentétesen dől be,vagyis a felület felfelé, (azaz N irányába) pöndörödik. (Ábra!)
Ezt a megfigyelést precízebbé is tehetjük:
37.9. Legyen v egy érintővektor p = r(u0, v0)-ben. Ekkor legyen
kp(v) =IIp(v,v)
Ip(v,v).
37.10. Tétel. (Euler tétele:) Tekintsük azaz r(u0, v0) körül azt a görbét, amit úgy kapunk,hogy a felületet elmetsszük az r(u0, v0)-en áthaladó, N(u0, v0), v-t tartalmazó síkkal. Állítás: agörbe r(u0, v0)-beli görbülete pont kp(v), feltéve, ha a metsző síkon és a görbén úgy irányítunk,hogy a görbe normávektora pont N(u0, v0) legyen. (Ábra!)
Ezért k(v)-t metszetgörületnek is nevezik. Ez ráirányítja a figyelmet az első és másodikalapforma kapcsolatára.
37.11. Megjegyzés. (Nem kell vizsgára.) Valójában erősebbet is mondhatunk:
37.12. Tétel. (Nem kell vizsgára.) (Meusnier tétele – analitikus alak:)Legyen σ : I → Ω egy paramétertartományi görbe, γ = r σ a megfelelő felületi görbe.Ha t ∈ I-re kγ(t)(γ(t)) = 0, akkor a γ görbülete γ(t)-ben
κγ(t) =kγ(t)(γ(t))
Nγ(t) ·N(σ(t)),
ahol Nγ(t) a térgörbe-normálvektor, és N(σ(t)) a felület normálvektora.
117

37.13. Tétel. (Nem kell vizsgára.) (Meusnier tétele – geometriai alak:) Legyen S a gömb-
felület, amelynek a sugara R =1
|kγ(t)(γ(t))|, középpontja a c = r(σ(t)) +
1
kγ(t)(γ(t))N(σ(t))
pont. Ekkor a γ t-beli simulósíkja által az S gömbből kimetszett kör megegyezik a γ felületigörbe t helyen vett simulókörével. (Ábra!)
37.14. Megjegyzés. (Nem kell vizsgára.) Mivel γ = r σ(t), ezért a láncszabály szerint
γ(t) = ru(σ(t))σ1(t) + rv(σ(t))σ2(t),
feltéve, hogy a σ(t) = (σ1(t), σ2(t)) jelölést alkalmazzuk. Kollokviálisabb, de de szemléltesebba σ(t) = (u(t), v(t)), jelölés, amivel
γ(t) = ru(σ(t))u(t) + rv(σ(t))v(t).
Így aztán az adott pontban
kγ(t)(γ(t))) =IIγ(t)(γ(t), γ(t))
Iγ(t)(γ(t), γ(t))=
Eu2 + 2Fuv +Gv2
Lu2 + 2Muv +Nv2,
ahol E,F,G, L,M,N -be (σ(t))-t, u, v-be (t)-t kell írni.
37.15. Weingarten leképezés. Van egyértelműen egy olyan
Ap : Tpr → Tpr
leképezés, hogyIp(v, Av) = IIp(v,v).
Ez az ún. Weingarten leképezés. Ez egy önadjungált leképezés (mindkét alapformában). Mintilyen, ezért ez diagonalizálható egy ortogonális bázissal (mindkét alapformában), amelyről azis feltehető, hogy ortonormált az első alapformában. Tehát
A ∼[κ1
κ2
].
Azt mondjuk, hogy κ1,κ2 a két főgörbület. Ha a Weingarten leképezés nem konstans-szoridentitás, akkor ez a diagonalizáció (előjelektől eltekintve) kijelöl két főirányt (mindegyiketelőjel erejéig).
Kivételes eset, amikor κ1 = κ2, vagyis a Weingarten leképezés konstansszor identitás. Azilyen pontokat umbilikus pontoknak nevezik.
37.16. A Weingarten leképezés mátrix a szokásos érintőbázisban (vagyis az ru, rv)
A = G−1B.
Ekkor az A mátrix két sajátértéke κ1, κ2; ezek a mátrix karakterisztikus polinomjából kijön-nek.
Az A mátrixra találhatunk két független sajátvektort, c1 =
[a1b1
], c2 =
[a2b2
](a κ1,
κ2 sajátértékekkel). Ha a sajátértékek különbözőek, akkor Jrc1 = a1ru + b1rv, és Jrc2 =
118

a2ru+b2rv már eleve ortogonálisak, legfeljebb normalizálni kell őket, ezek lesznek a főirányok.Úgy szoktunk eljárni, hogy a kapott s1, s2 főirány-vektorok egységhosszúak egyenek (és minttudjuk, merőlegesek is lesznek).
Ha a saját értékek egybe esnek, akkor a sajátvektorok tetszőlegesek lehetnek, csak legyenekfüggetlenek. Legegyszerűbb Gram-Schmidt ortogonalizálni ru, rv-t.
37.17. Megjegyzés. A metszetgörületre visszatérve: Ha a felületnek s1, s2 a két saját iránya,κ1,κ2 saját vektorokkal, és
v = s1 cosϕ+ s2 sinϕ.
(c = 0), akkork(v) = κ1 cos
2 ϕ+ κ2 sin2 ϕ.
37.18. Mivel két főgörbület van, ezért nem igazán lehet simulógömböt ésszerűen definiálni,inkább simuló ellipszoidot, hengert, vagy hiperboloidot. Ez alól kivétel az az eset, amikorκ1 = κ2, vagyis az umbilikus pontok esete. Ilyenkor
κ = κ1 = κ2
a pontbeli általános görbület,
ρ =1
|κ|a görbületi sugár,
r(u0, v0) + ρ(u0, v0)N(u0, v0)
a görbületi középpont. A görbületi középponttal megegyező középpontú, a görbületi sugár-ral megegyező sugarú gömböt a felület r(u0, v0)-beli simulógömbjének nevezzük. (De perszemindehhez az kell, hogy umbilikus pont legyen.)
37.19. Általánosan, a κ1,κ2 főgörbületekből szokás definiálni a
H = κ1 + κ2
skalár- vagy Minkowski-görbületet; illetve a
K = κ1κ2
szorzat- vagy Gauss-görbületet.
37.20. Megjegyezzük, hogy a főgörbületek, illetve a Minkowski-görbület előjele függ a felületirányításától, de a Gauss-görbület nem. Tudnillik, ha az u, v változók sorrendjét megcseréljük,akkor a normálvektor Nrégi =
ru × rv|ru × rv|
-ről Núj =rv × ru|rv × ru|
= − ru × rv|ru × rv|
= −Nrégi-re változik.
Ez megjelenik a második alapformában, illetve a Weingarten leképezésben előjelváltásként.Így az új főgörbületekre κi,új = −κi,régi. A középgörbületben a főgörbületek összeadódnak, ésígy Húj = −Hrégi a Minkowski-görbületre. De a szorzatgörbületben az előjelváltások kiejtikegymást és így Kúj = Krégi a Gauss-görbületre.
119

37.21. PraktikusanG−1B ∼
[κ1
κ2
],
ésG−1 =
1
EG− F 2
[G −F−F E
]alapján
H = κ1 + κ2 = trG−1B =B ∧∧GdetG
=EN − 2FM +GL
EG− F 2,
4ésK = κ1κ2 = detG−1B =
detBdetG
=LN −M2
EG− F 2.
37.22. Ha egy felület minden pontjában
H = 0,
akkor minimálfelületről beszélünk.Ilyen például a szappanhártya felülete. A szappanhártya ugyanis olyanis olyan, hogy
minden pontjában erő hat rá, mely a főgörbületek összegével arányos. A szappanhártyacsakis akkor lehet equilibriumban, vagyis egyensúlyi állapotban, ha a két erő kioltja egymást,vagyis a főgörbületek összege nulla.
A közönsége szappanbuborék nem ilyen. Ott a szappanhártya két oldalán a nyomás kü-lönböző, és főgörbületből eredő erők nem kioltják egymást, hanem a nyomáskülönbséget el-lensúlyozzák. Mivel a nyomáskülönbség konstans, ezért a szappanbuborék csak konstans, denemnulla Minkowski görbületű felület.
37.23. Az olyan felületeket , amelyekre
K = 0,
lefejthető, vagy kiteríthető felületeknek nevezzük. (Ilyen például a kúp vagy hengerfelület.)Ezek azok a felületek, amiket helyileg síkba lehet teríteni.
37.24. Az olyan felületeket, amelyekre
K = konstans,
állandó görbületű felületeknek mondjuk. Ezek helyileg (és a saját belső geometriájukban)mindig úgy viselkednek mint a gömb (K > 0), a sík (K = 0), vagy a hiperbolikus sík (K < 0).[Ez azt jelenti, hogy ha a legjobb szándékunk szerint „egyenes” szakaszokat húzogatunk afelületen, kis háromszögeket képzünk, szögeket mérünk, stb., akkor ugyanazokat a jelenségekettapasztaljuk ezekben a „belső geometriákban” helyileg, mint a gömbi/euklideszi/hiperbolikusesetekben.]
Ennek megfelelően, egy általános felületen egy pontot elliptikusnak mondunk ha K > 0,parabolikusnak ha K = 0, hiperbolikusnak ha K < 0.
Az = xy
nyeregfelület például minden pontjában hiperbolikus, de sajnos nem állandó görbületű.
4Ha X és Y 2× 2-es mátrixok, akkor alkalmazhatjuk a X ∧∧Y = tr (adjX ) · Y = tr X · (adjY) jelölést. Ezegy bilineáris formát definiál. (És megvan az a tulajdonsága, hogy 1
2X ∧∧X = detX .)
120

38. Implicit alakban adott görbék és felületekGyakran nagyon kényelmetlen explicit paraméterezéseket használni, de ilyenkor is felmerül agörbület kiszámításának az igénye.
Implicit alakban adott síkgörbék
38.1. Ilyenkor a görbe azF (x, y) = c
egyenletből adódik. Egy (x0, y0) pontjában ez tényleg görbeként paraméterezhető ha
∇F (x0, y0) = 0.
Ezen belül, ha Fy(x, y) = 0, akkor az x koordináta felhasználható lokális paraméterezésre,az így kapott paraméterezés (x, f(x)) alakú;
F (x, f(x)) = c.
38.2. Lederiválva,Fx(x, f(x)) + Fy(x, f(x))f
′(x) = 0,
így
f ′(x) = −Fx(x, f(x))Fy(x, f(x))
,
vagy, kollokviálisabban:
f ′ = −FxFy.
Kétszer deriválva,
Fxx(x, f(x)) + 2Fxy(x, f(x))f′(x) + Fyy(x, f(x))f
′(x)2 + Fy(x, f(x))f′′(x) = 0,
amiből hasonlóan
f ′′ = −FxxF
2y − 2FxyFxFy + FyyF
2x
F 3y
.
38.3. Ez alapján már kiszámolhatunk mindent:
γ(x) = (x, f(x)).
γ′(x) = ⟨1, f ′(x)⟩ =⟨1,−Fx
Fy
⟩.
T(x) = sgnFy⟨Fy,−Fx⟩√F 2x + F 2
y
.
N(x) = sgnFy⟨Fx, Fy⟩√F 2x + F 2
y
.
γ′′(x) = ⟨0, f ′′(x)⟩ =⟨0,−
FxxF2y − 2FxyFxFy + FyyF
2x
F 3y
⟩.
κ =|γ′ × γ′′||γ′|3
= −sgnFyFxxF
2y − 2FxyFxFy + FyyF
2x√
F 2x + F 2
y
3 .
121

38.4. Hasonlóan járhatunk el, ha Fx = 0, amikor y-nal paraméterezhetünk. Mindezekbenaz esetekben, a paraméterezés irányát az határozza meg, hogy monoton növekedő legyenvalamelyik koordinátában.
Geometriaibb konvenció, hogy a görbe jobb oldalán F (x, y) > c legyen, míg a bal oldalánF (x, y) < c legyen. Ilyenkor
T =∇F
|∇F |=
⟨−Fy, Fx⟩√F 2x + F 2
y
.
N = − ∇F|∇F |
= − ⟨Fx, Fy⟩√F 2x + F 2
y
.
κ =
[FxFy
] [Fyy −Fxy−Fxy Fxx
] [FxFy
]√F 2x + F 2
y
3 =FxxF
2y − 2FxyFxFy + FyyF
2x√
F 2x + F 2
y
3 .
38.5. A korábbi számolás során kapott információt felhasználhatjuk az ívhossz leírására. Azelemi ívhosszelem
|γ′(x)| dx =√F 2x + F 2
y
dx
|Fy|.
Az ívhossz pedig
L =
∫Ωx
√F 2x + F 2
y
dx
|Fy|=
∫Ω
√F 2x + F 2
y |δ(F = c)| =∫Ω
|δ(F = c)0|.
Itt |δ(F = c)| = F−1(δc) =dx
|Fy|, a felület F szerint (vagyis változóan) infinitezimáli-
san megvastagított mértéke; míg |δ(F = c)0| = F−1(δc)0 =
√F 2x + F 2
y
dx
|Fy|, a felületnek az
euklideszi távolság szerint (vagyis egyenletesen) infinitezimálisan megvastagított mértéke.
A fenti ívhosszkifejezés akkor számolható jól, amikor√F 2x+F
2y
|Fy | =√
1 + F 2x
F 2y
leegyszerűsödikF (x, y) = c ismeretében.
122

Implicit alakban adott felületek
38.6. Ilyenkor a felület egyF (x, y, z) = c
egyenletből származik. Ez tényleg egy felületdarabot ad meg, ha ∇F = 0. Ezen belül,ha Fz = 0, akkor az x, y koordináták felhasználhatóak lokális paraméterezésre. Ilyenkor aparaméterezés (x, y, f(x, y)) alakú;
F (x, y, f(x, y)) = c.
38.7. Lederiválva egyszer, kapjuk, hogy
fx = −FxFz,
fy = −FyFz
;
illetve kétszeri deriválás után:
fxx = −FxxF2z − 2FxzFxFz + FzzF
2x
F 3z
,
fxy = −FxyF2z − FxzFyFz − FyzFxFz + FzzFxFy
F 3z
,
fyy = −FyyF
2z − 2FyzFyFz + FzzF
2y
F 3z
.
38.8. Ez alapjánr(x, y) = (x, y, f(x, y)),
rx(x, y) = ⟨1, 0, fx(x, y)⟩,
ry(x, y) = ⟨0, 1, fy(x, y)⟩.
G =
[rxrx rxryrxry ryry
]=
1 +F 2x
F 2z
FxFyF 2z
FxFyF 2z
1 +F 2y
F 2z
=1
F 2z
[F 2x + F 2
z FxFyFxFy F 2
y + F 2z
].
rx × ry =
⟨FxFz,FyFz, 1
⟩=
⟨Fx, Fy, Fz⟩Fz
=∇FFz
.
N = sgnFz⟨Fx, Fy, Fz⟩√F 2x + F 2
y + F 2z
= sgnFz∇F|∇F |
.
B =
[rxxN rxyNrxyN ryyN
]=
|Fz|√F 2x + F 2
y + F 2z
[fxx fxyfxy fyy
]=
=sgnFz
F 2z
√F 2x + F 2
y + F 2z
[FxxF
2z − 2FxzFxFz + FzzF
2x FxyF
2z − FxzFyFz − FyzFxFz + FzzFxFy
FxyF2z − FxzFyFz − FyzFxFz + FzzFxFy FyyF
2z − 2FyzFyFz + FzzF
2y
].
123

38.9. A Minkowski-görbületH = trG−1B =
= −sgnFzFxxF
2y + FxxF
2z + FyyF
2x + FyyF
2z + FzzF
2x + FzzF
2y − 2FxyFxFy − 2FxzFxFz − 2FyzFyFz√
F 2x + F 2
y + F 2z
3
= −sgnFz
FxFyFz
⊤ Fyy + Fzz −Fxy −Fxz−Fxy Fxx + Fzz −Fyz−Fxz −Fyz Fxx + Fyy
FxFyFz
√F 2x + F 2
y + F 2z
3 .
38.10. A Gauss-görbületK = detG−1B =
=
FxFyFz
⊤ FyyFzz − F 2yz FxzFyz − FxyFzz FxyFyz − FxzFyy
FxzFyz − FxyFzz FxxFzz − F 2xz FxyFxz − FyzFxx
FxyFyz − FxzFyy FxyFxz − FyzFxx FxxFyy − F 2xy
FxFyFz
(F 2
x + F 2y + F 2
z )2
=
FxFyFz
⊤adj
Fxx Fxy FxzFxy Fyy FyzFxz Fyz Fzz
FxFyFz
(F 2
x + F 2y + F 2
z )2
.
38.11. Hasonlóan lehet eljárni ha Fy = 0, stb. A fenti esetekben a normálvektorok ésMinkowski-görbület mások lehetnek előjel erejéig, mivel a felület irányítása megváltozik.
Geometriaibb konvenció, hogy a normálvektor szembe mutasson a gradienssel, stb. Ilyen-kor a normálvektor
N = − ∇F|∇F |
;
a Minkowski-görbület
H =
FxFyFz
⊤ Fyy + Fzz −Fxy −Fxz−Fxy Fxx + Fzz −Fyz−Fxz −Fyz Fxx + Fyy
FxFyFz
√F 2x + F 2
y + F 2z
3 ;
a Gauss-görbület
K =
FxFyFz
⊤adj
Fxx Fxy FxzFxy Fyy FyzFxz Fyz Fzz
FxFyFz
(F 2
x + F 2y + F 2
z )2
.
viszont nem függ az irányítástól.
38.12. A felületre a fenti számolásból
F =
∫Ωx,y
√F 2x + F 2
y + F 2z
dx dy
|Fz|=
∫Ω
√F 2x + F 2
y + F 2z |δ(F = c)| =
∫Ω
|δ(F = c)0|.
Ez néha jól számolható.
124

Implicit alakban adott térgörbék görbülete
38.13. Ilyenkor a görbe aF (x, y, z) = c1,
G(x, y, z) = c2
felületek metszeteként áll elő. Valóban, ha
∇F ×∇G ≡ ⟨FyGz − FzGy, FzGx − FxGz, FxGy − FyGx⟩ = 0,
akkor a metszet görbeként paraméterezhető. Ezen belül, ha például az első koordináta FyGz−FzGy = 0, akkor az x koordináta felhasználható paraméterezésre. Ekkor a paraméterezés
(x, u(x), v(x))
alakú;F (x, u(x), v(x)) = c1,
G(x, u(x), v(x)) = c2.
38.14. A következő számolásokhoz felhasználjuk az alábbi segédmennyiségeket:
t = ∇F ×∇G = ⟨FyGz − FzGy, FzGx − FxGz, FxGy − FyGx⟩;
|t|2 = |∇F |2|∇G|2 − (∇F · ∇G)2;
F = t⊤(D2F )t =
FyGz − FzGy
FzGx − FxGz
FxGy − FyGx
⊤ Fxx Fxy FxzFxy Fyy FyzFxz Fyz Fzz
FyGz − FzGy
FzGx − FxGz
FxGy − FyGx
;
G = t⊤(D2G)t =
FyGz − FzGy
FzGx − FxGz
FxGy − FyGx
⊤ Gxx Gxy Gxz
Gxy Gyy Gyz
Gxz Gyz Gzz
FyGz − FzGy
FzGx − FxGz
FxGy − FyGx
;
b = G∇F − F∇G = ⟨FxG−GxF , FyG−GyF , FzG−GzF ⟩
|b|2 =[G
−F
]⊤ [ |∇F |2 ∇F · ∇G∇F · ∇G |∇G|2
] [G
−F
].
38.15. A görbére vonatkozó egyenleteket lederiválva
Fx + Fyu′ + Fzv
′ = 0,
Gx +Gyu′ +Gzv
′ = 0.
Ebbőlu′ =
FzGx − FxGz
FyGz − FzGy
,
v′ =FxGy − FyGx
FyGz − FzGy
.
125

Ez alapján aγ(x) = (x, u(x), v(x))
görbére
γ′(x) = ⟨1, u′, v′⟩ =⟨1,FzGx − FxGz
FyGz − FzGy
,FxGy − FyGx
FyGz − FzGy
⟩=
=⟨FyGz − FzGy, FzGx − FxGz, FxGy − FyGx⟩
FyGz − FzGy
=∇F ×∇GFyGz − FzGy
=t
FyGz − FzGy
.
38.16. A görbére vonatkozó egyenleteket kétszer deriválva
F(x) + Fyu′′ + Fzv
′′ = 0,
G(x) +Gyu′′ +Gzv
′′ = 0,
ahol
F(x) =
1u′v′
⊤ Fxx Fxy FxzFxy Fyy FyzFxz Fyz Fzz
1u′v′
=F
(FyGz − FzGy)2,
és hasonlóan G(x)-re. Ebből
γ′′ = ⟨0, u′′, v′′⟩ = ⟨0, FzG−GzF , GyF − FyG⟩(FyGz − FzGy)3
,
és
γ′ × γ′′ =⟨FxG−GxF , FyG−GyF , FzG−GzF ⟩
(FyGz − FzGy)3=
b
(FyGz − FzGy)3.
38.17. Így a görbületre
κ =|γ′ × γ′′||γ′|3
=|b||t|3
=
√|b|2(|t|2)3
=
√|∇F |2G2 + |∇G|2F 2 − 2(∇F · ∇G)F G
(|∇F |2|∇G|2 − (∇F · ∇G)2)3.
Implicit alakban adott térgörbék torziója
38.18. A torzió kiszámítása hasonló módon lehetséges, de már bonyolultabb, hiszen harmad-rendű deriváltak jelennek meg benne. A következő segédmennyiségeket érdemes használni:
c = −3t∇(FyGz − FzGy)
(FyGz − FzGy)2,
F = D3F (t, t, t) + 3((D2F )t,∇F, (D2G)t),
G = D3G(t, t, t) + 3((D2F )t,∇G, (D2G)t).
Megjegyzés:t∇F = D3F (t, t, t) + 2((D2F )t,∇F, (D2G)t)
t∇G = D3G(t, t, t) + 2((D2F )t,∇G, (D2G)t)
126

miattF = t∇F + ((D2F )t,∇F, (D2G)t)
G = t∇G+ ((D2F )t,∇G, (D2G)t)
Továbbá, at = ((D2F )t)× ((D2G)t)
jelölésselF = t∇F − t∇F,
G = t∇G− t∇G.
Továbbat∇(FyGz − FzGy) = (i, (D2F )t,∇G)− (i, (D2G)t,∇F ).
38.19. A görbére vonatkozó egyenleteket háromszor deriválva
F(x) + Fyu′′′ + Fzv
′′′ = 0,
G(x) +Gyu′′′ +Gzv
′′′ = 0,
ahol
F(x) =F
(FyGz − FzGy)3+ c
F
(FyGz − FzGy)2,
és hasonlóan G(x)-re. Ebből
γ′′′ = ⟨0, u′′′, v′′′⟩ = ⟨0, FzG−GzF , GyF − FyG⟩(FyGz − FzGy)4
+ cγ′′,
így
(γ′, γ′′, γ′′′) =F G− GF
(FyGz − FzGy)6,
amiből végül
τ =F G− GF
|b|2.
127

39. Elméleti feladatok: DifferenciálgeometriaA következő feladatokban kellő mértékű differenciálhatóságot felttetelezünk.
1. Az y = f(x) függvény görbülete?
M.: κ(x) =f ′′(x)
(1 + (f ′(x))2)3/2.
2. a.) Az r× r linearitási vizsgálata: Bizonyítandó, hogy
(αr)× (αr) = α2 r× r.
b.) Az γ(t) = [r(t)] projektív módon megadott görbe esetén [r× r]′ az érintőt megadóegyenes (ha a belső kifejezés nem nulla).
c.) Az érintő projektív invariáns.
3. a.) (rrr) = 0 pontosan akkor, ha κ = 0. (Feltéve, hogy az érintő a korábbi feladatértelmében jóldefiniált.)
b.) A nem eltűnő görbület projektív invariáns jelenség.
c.) A (rrr) kifejezés linearitási vizsgálata: Bizonyítandó, hogy
((αr), (αr), (αr) ) = α3 (r, r, r).
d.) Az r =r× r
(rrr)kifejezés linearitási vizsgálata: Bizonyítandó, hogy
(αr) =1
αr.
4. a.) Görbe érintőseregének görbéjének érintőseregének a görbéje pontosan az eredetigörbe. (Feltéve, hogy az eredeti görbe görbülete sehol sem tűnik el.) Pontosabban,igazoljuk, hogy
(r× r)× (r× r) = (rrr) r
b.) Specifikusabban: ha (rrr) = 0, akkor ˆr = r.
5. Melyek azok az R-en paraméterezett görbék
a.) a síkon, melyeknek a κ-ja konstans;
b.) a térben, melyeknek a κ, τ -ja konstans?
M.: a.) Megf. paraméterezett egyenesek, körök.
b.) Megf. paraméterezett egyenesek, körök, hélixgörbék.
128

6. Igazoljuk direkt számolással
a.) a κ =γ ∧ γ|γ|3
görbület paraméterinvarianciát a síkon;
b.) a κ =|γ × γ||γ|3
görbület paraméterinvarianciát a térben;
c.) a τ =γγ
...γ
|γ × γ|2torzió paraméterinvarianciáját a térben.
7. Az z = f(x, y) felület Gauss- és Minkowski-görbületei?
M.: r(x, y) = (x, y, f(x, y)) használható
rx = ⟨1, 0, fx⟩, ry = ⟨0, 1, fy⟩, rx × ry = ⟨−fx,−fy, 1⟩.
N =rx × ry|rx × ry|
=1√
1 + (fx)2 + (fy)2⟨−fx,−fy, 1⟩.
G =
[rxrx rxryryrx ryry
]=
[1 + (fx)
2 fxfyfxfy 1 + (fx)
2
].
B =
[rxxN rxyNryxN ryyN
]=
[⟨0, 0, fxx⟩ ·N ⟨0, 0, fxy⟩ ·N⟨0, 0, fxy⟩ ·N ⟨0, 0, fyy⟩ ·N
]=
1√1 + (fx)2 + (fy)2
[fxx fxyfxy fyy
].
detG = 1 + (fx)2 + (fy)
2, detB =fxxfyy − (fxy)
2
1 + (fx)2 + (fy)2.
Ebből K =detBdetG
=fxxfyy − (fxy)
2
(1 + (fx)2 + (fy)2)2.
További számolással: H =(fxx + fyy) + (fyy(fx)
2 − 2fxyfxfy + fxx(fy)2)
(1 + (fx)2 + (fy)2)3/2.
8. Az r(θ, t) = (f(t) cos θ, f(t) sin θ, t) forgásfelület Gauss- és Minkowski-görbületei?
129

40. Görbék és felületek számítógépes ábrázolása
40.1. Melyek a lehetséges feladatok?Például adott néhány pont valamilyen sorrendben csak úgy önmagában, vagy akár vala-
milyen (pl. idő) paraméterrel ellátva. Szeretnénk ezekre görbét illeszteni.Lehetséges okok:
• Nagyon drága a pontokat megadó függvény kiszámítása, szeretnénk valami praktikusabbgörbe-reprezentációt.
• Eleve csak véges sok pont van megadva, és szeretnénk gyakorlati (esztétikai, empirikus,kivitelezési stb.) okokból görbét illeszteni rájuk.
Matematikai célkitűzések szerint:
• Interpoláció. Szeretnénk ha görbe pontosan illeszkedne az adott pontokra. (Lehetségesokok: pl. műszaki tervezési okokból.) [Ábra!]
• Approximáció. Csak közelíteni akarjuk a görbét. (Lehetséges okok: a megadott adatokamúgy is bizonytalanok, néha hibásak vagy akcidentálisak, pl. időjárási adatok.) [Ábra!]
• Extrapoláció. Jósolni szeretnénk. Technikailag ugyanaz, mint az interpoláció, de bi-zonytalanabb jellegű. [Ábra!]
(Példa: Nyerni szeretnénk a tőzsdén, bár ez ott így nem fog sikerülni. Ok: Az interpo-láció, extrapoláció a sima függvényekre működik jól. Az, hogy ezek a módszerek nemhasználhatók a tőzsdén, az arra figyelmeztet, hogy az ott megjelenő függvényeket nemlehet sima, vagy akár csak differenciálható függvényekkel modellezni.)
Szóval lényegében, és különösen a számítógépes geometria szempontjából, kétféle feladat van:interpoláció, és approximáció.
40.2. Általánosítás: szeretnénk pontokra felület illeszteni, vagy szeretnénk időben változópontokhoz időben változó görbét illeszteni. Esetleg időben változó pontokhoz időben változófelületet.
Ezek már 2- ill. 3-dimenziós illesztési feladatok a paramétertartományt illetően. De visszaa görbékhez, amikkel először foglalkozni fogunk.
40.3. Ami a paraméterezést illeti: Ha az xi pontok adottak, akkor ugye kétféle lehetőségvan: Vagy (I) szabadon (de valamilyen sorrendben) adottak, vagy (II) ti paraméterértékekhezrendelve. De mivel az approximáló vagy interpoláló görbe úgyis valamilyen paraméterértékhezvan rendelve; ezért gyakran az (I) esetben is implicit vagy explicit módon paraméterértéketrendelünk. Ezekre szokásos és praktikus módszerek:
• Ekvidisztáns paraméterbeosztás. Ilyenkor egy olyan beosztást csinálunk, hogy ∆ti =ti+1 − ti konstans. Ez mindig lehetséges.
• Valamelyik koordinátát, pl. x1-et használjuk fel paraméternek: ti = xi1, ha ez lehetséges.
• A paraméter-hozzárendelést úgy hajtjuk végre, hogy a beosztási távolságok, pl. a pontoktérbeli távolságától függjenek: ∆ti = ti+1 − ti = |xi+1 − xi|.
130

• Ezek kombinációi és más módszerek.
Ezáltal a paraméteres módszerek is használhatóak szabadon álló pontokra (de az is igaz, hogya szabadon álló pontos módszerek tekinthetők paraméteres feladatoknak is.)
Adottak a (ti,xi) i ∈ 0, . . . , n párok, ti monoton növekvő. Néhány klasszikus módszer:
40.4. A legalapvetőbb a lineáris interpoláció:Az xi és xi+1 pontokat egyenes szakaszokkal kötjük össze. Formálisan
f(t) =(ti+1 − t)xi + (t− ti)xi+1
ti+1 − tiha ti ≤ t ≤ ti+1.
Ismert tulajdonságok:o.) Interpoláció.a.) Előnyök: Mindig könnyen végrehajtható; a görbe az xi pontok konvex burkán belül
fut.b.) Hátrányok: Szögletes (ált. csak C0), nem szép, nem túl jól approximál.
40.5. Az „ellenkező véglet” a Lagrange-interpoláció:
f(t) =n∑i=0
xi
n∏j=0j =i
t− tjti − tj
.
Ismert tulajdonságok:o.) Interpoláció.a.) Előnyök: Elméletileg jól karakterizálható: Az az egyértelmű n-edfokú polinomfügg-
vény, amely a kontrolladatokra illeszkedik.b.) Hátrányok: Számolása nagyon erőforrásigényes. A Lagrange-interpoláció rendkívül
anarchikus, instabil viselkedésű, a görbe tipikusan az xi pontok konvex burkán kívül fut. Azalakja szemre teljesen független a kontrollpontok elhelyezkedésétől.
40.6. Tanulságok:a.) Szeretnénk kellően sima függvényeket, la. C2-ket.b.) Szeretnénk rel. olcsón kiszámítható függvényt.c.) Szeretnénk stabil eredményt, mondjuk a kontrolladatok konvex burkában.d.) Lehet hogy az approximáció is elég, mert az interpoláció túl erős kikötés.
131

41. Bézier-görbék
Bézier-görbék de Casteljau-előállítása
Alapötlet: A lineáris interpoláció iterált változata.
41.1. Definíció. Adottak a p0, . . . ,pn pontok a térben. Minden t ∈ [0, 1] számra legyen
p00(t) = p0, . . . ,p
0n(t) = pn,
továbbá minden j ∈ 1, 2, . . . , n, i ∈ 0, 1, . . . , n− j, t ∈ [0, 1] esetén legyen
pji (t) = (1− t)pj−1i (t) + tpj−1
i+1 (t).
(Rekurzív definíció.) Ezek közül az utolsó görbe pn0 (t), t ∈ [0, 1]. Ezt a p0, . . . ,pn kont-rollpontokhoz tartozó Bézier-görbének nevezzük, és B(t)-vel jelöljük. A kontrollpontok általmeghatározott sokszöget (vagyis a p1
i (t)-k összeillesztését) kontrollpoligonnak, az n számot agörbe rangjának nevezik.
41.2. Ábra: rögzített t = 1/3-ra a pji pontok.
41.3. Ábra: Algoritmikus ábra.
pn = p0n(t)
t
pn−1 = p0
n−1(t)1−t−→ p1
n−1(t)t
t
pn−2 = p0
n−2(t)1−t−→ p1
n−2(t)1−t−→
t
t
. . ....
t
t
t
p0 = p0
0(t)1−t−→ p1
0(t)1−t−→ · · · 1−t−→ pn0 (t) = B(t)
41.4. A Bézier-görbe ilyen előállítását de Casteljau-eljárásnak, a pji pontokat de Casteljau-pontoknak hívjuk (utóbbira a helyes kifejezés „de Casteljau-függvények” lenne).
41.5. Ábra: kontrollpoligon és Bézier-görbéje.
41.6. Tétel. A Bézier-görbe:a.) Egy egyenesre eső pontok esetén egy szakasz (esetleg többszörös fedéssel, oda-visszajárással).b.) Három nem egyenesre eső pont esetén egy parabola.c.) Affin invariáns, azaz a Bézier-görbe affin képe nem más, mint a kontrollpoligon affin
képéhez tartozó Bézier-görbe.d.) A kontrollpoligon konvex burkában van.
132

Berstein-polinomok
41.7. Egy dimenziós Bernstein-polinomok:
Bni (t) =
(ni
)ti(1− t)n−i,
ahol 0 ≤ i ≤ n. Számunkra egyébként a t ∈ [0, 1] tartomány a fontos.
41.8. A Bernstein-polinomok kielégítik az alábbi elemi azonosságokat:
Bni (t) = (1− t)Bn−1
i (t) + tBn−1i−1 (t),
n∑i=0
i
nBni (t) = t,
i+ 1
n+ 1Bn+1i+1 = tBn
i (t),
(1− i
n+ 1
)Bn+1i (t) = (1− t)Bn
i (t),
Bnk (t) =
n∑j=k
(nj
)(jk
)(−1)j−ktj,
(ni
)ti =
n∑j=i
(ji
)Bnj (t),
Bnk (tt0) =
n∑i=k
Bni (t)B
ik(t0).
41.9. Lemma. Rögzített n-re a Bernstein-polinomon [0, 1] intervallum egy (pozitív) egység-osztását adják, azaz
0 ≤ Bni (t) ≤ 1,
n∑i=0
Bni (t) = 1.
Továbbá a legfeljebb n-edfokú polinomok vektorterében egy bázist alkotnak. (Minden legfel-jebb n-edfokú polinom egyértelműen előáll Bn
i -k (0 ≤ i ≤ n) lineáris kombinációjaként.)
41.10. A deriváltakra és integrálokra
d
dtBni (t) = n(Bn−1
i−1 (t)−Bn−1i (t)),
dk
dtkBni (t) =
n!
(n− k)!
k∑j=0
(−1)k−jBn−ki−j (t),
∫ t
s=0
Bni (s) ds =
1
n+ 1
n+1∑j=i+1
Bn+1j (t),
∫ 1
s=0
Bni (s) ds =
1
n+ 1.
133

Bézier-görbék Bernstein-polinomos előállítása
41.11. A p0, . . . ,pn kontrollpontokkal generált Bézier-görbe de Casteljau-pontjaira
pji (t) =
j∑k=0
pi+kBjk(t) (0 ≤ j ≤ n)
A Bézier-görbére pedig ebből következően
B(t) = pn0 (t) =n∑k=0
pkBnk (t).
41.12. Következmény. a.) Két Bézier-görbe lineáris kombinációja a megfelelő kontroll-pontok lineáris kombinációjának Bézier-görbéje.
b.) A kontrollpontok sorrendjét megfordítva az eredeti görbe megfordított végigjárásúváltozatát kapjuk. (Tehát a képgörbe nem változik.)
c.) Ha a kontrollpontok egy egyenesen sorban azonos távolságra helyezkednek el, akkor aBézier-görbe B(t) = p0 + t(pn − p0).
41.13. Tétel. Ha P egy a [0, 1]-en értelmezett polinomiális görbe, melynek a fokszáma ≤ n,akkor egyértelműen léteznek olyan p0, . . . ,pn kontrollpontok, hogy a generált Bézier-görbéreP(t) = B(t) minden t ∈ [0, 1] esetén.
Következésképpen: Bézier-görbe ≡ polinomiális görbe.
41.14. Tétel. (Bézier-görbe rangemelése.) (Nem kell vizsgára.) Legyen a B(t) Bézier-görbea p0, . . . ,pn kontrollpontokkal; és B(t) Bézier-görbe a p0, . . . , pn+1 kontrollpontokkal, ahol
p0 = p0, pi =i
n+ 1pi+1 +
(1− i
n+ 1
)pi, (1 ≤ i ≤ n), pn+1 = pn.
Ekkor a két Bézier-görbe megegyezik: B(t) = B(t).
41.15. Tétel. (Bézier-görbe felosztása.) (Nem kell vizsgára.) Legyen adott a B(t) Bézier-görbe a p0, . . . ,pn kontrollpontokkal; és B(t) Bézier-görbe a p0, . . . , pn+1 kontrollpontokkal,és t0 ∈ (0, 1). Ekkor a B−(t) = B(tt0) és B+(t) = B(t0+ t(1− t0)) Bézier-görbék keletkeznek.Ezekre a (de Casteljau-pontokkal segítségével kifejezett) kontrollpontok
B−(t)-re:
p−0 = p0
0(t0) = p0, p−1 = p1
0(t0), . . . , p−n−1 = pn−1
0 (t0), p−n = pn0 (t0) = B(t);
B+(t)-re:
p+n = p0
n(t0) = pn, p+n−1 = p1
n−1(t0), . . . , p+1 = pn−1
1 (t0), p+0 = pn0 (t0) = B(t);
134

Bézier-görbék deriváltjai
41.16. Definíció. A p0, . . . ,pn kontrollpontok r-differenciái a
(0p)i = pi
(rp)i = (r−1p)i+1 − (r−1p)i
rekurzióval definiált (rp)i vektorok. A továbbiakban (rp)i helyett egyszerűen csak rpi-tírunk, de érdemes észben tartlani, hogy ez a kifejezés nem csak pi-től függ, hanem a rákövet-kező r darab kontrollponttól is.
41.17. Tétel.(rp)i = r+1pi.
rpi =r∑j=0
(rj
)(−1)r−jpi+j.
41.18. Tétel. Ha a B(t) Bézier-görbe kontrollpontjai p0, . . . ,pn, akkor a B(r)(t) Bézier-görbekontrollpontjai a
n!
(n− r)!rpi (0 ≤ i ≤ n− r)
pontok. Másképp:
B(r)(t) =drB
dtr(t) =
n!
(n− r)!
n−r∑i=0
rpiBn−ri (t).
41.19. Következmény. A Bézier-görbe végpontjaiban a deriváltak csak a végponthoz közelikontrollpontoktól függenek. Pontosabban:
B(r)(0) =drB
dtr(0) =
n!
(n− r)!rp0,
B(r)(1) =drB
dtr(1) =
n!
(n− r)!rpn−r.
Miért fontosak ezek a deriváltak? Azért, mert esetleg egymáshoz akarjuk illeszteni ezeketa Bézier-görbéket.
135

42. Spline interpoláció
42.1. Tegyük fel, hogy p0, . . .pn pontok. Adottak az u0 < . . . < un csomópontok. In-terpolálni szeretnénk, úgy, hogy a pi−1 és pi közé beillesztünk egy [ui−1, ui]-n értelmezettr-edfokpolinomgörbét . Az így kapott görbe a r-edfokú spline.
Látható, hogy az első fokú (lineáris) spline az a lineáris interpoláció; ez egyértelmű, denem ad nagyon szép eredményt. Ha magasabbfokú spline-okat tekintünk, akkor már többfélemódon választhatunk polinomiális görbét. Az így rendelkezésre álló szabadságot felhasznál-hatjuk arra, gondoskodjunk arról, hogy az interpoláló görbe minnél szebb legyen; pl.: C1, C2,stb.
A másodfokú (kvadratikus) spline relatív érdektelen, vagy legalábbis nem olyan jó, de aharmadfokú (köbös) már annál inkább:
42.2. Köbös spline interpoláció, C2 eset:Adottak a p0, . . .pn pontok. Szeretnénk a pontok közé harmadfokú polinomgörbéket be-
rakni. Azt reméljünk, hogy C2 interpolációt tudunk elérni.Tegyük fel, hogy a k-dimenziós térben vagyunk (k = 2 sík, k = 3 tér) és végezzünk
dimenzióanalízist a feladatra vonatkozóan.Kell egy S : [u0, un] → Rk harmadfokú spline interpoláció, azaz
S0(u) = S|[u0,u1](u), . . . Sn−1(u) = S|[un−1,un](u)
vagyis n darab, harmadfokú (azaz 4 együtthatós) polinomgörbe, Rk-értékű. Vagyis van
n× 4× k
adatunk (dimenziónk). Az interpolációs feltétel azt jelenti, hogy minden egyes spline darabkezdő- és végpontja meg van határozva:
Si−1(ui−1) = pi−1, Si−1(ui) = pi.
Ez n× 2× k lineáris feltétel, vagyis igazából marad
n× 2× k
dimenzió arra, hogy igazítsunk az interpoláció szépségén. Azt szeretnénk, hogy az egymásután fűzött spline darabok szép függvényt adjanak meg.
C0: Vagyis folytonosság: Az interpolációs feltétel miatt ez már eleve biztosított.C1: Az jelenti, hogy
S ′i−1(ui) = S ′
i(ui)
minden i ∈ 1, . . . , n− 1-re. Ez(n− 1)× k
lineáris feltétel.C2: Az jelenti, hogy
S ′′i−1(ui) = S ′′
i (ui)
minden i ∈ 1, . . . , n− 1-re. Ez(n− 1)× k
136

lineáris feltétel.Még mindig marad 2× k szabadsági fok, amit felhasználhatunk. A gyakorlatban hasznos-
nak bizonyult feltételek:(A)
S ′0(u0) = t0, S ′
n−1(un) = tn;
az ún. "rögzített spline" feltétel.(B)
S ′′0 (u0) = 0, S ′′
n−1(un) = 0;
az ún. "szabad spline" feltétel.Gyakorlatban érdekes még, amikor p0 = pn, és egy periodikus függvényt szeretnénk kapni.
Ilyenkor(C)
S ′0(u0) = S ′
n−1(un), S ′′0 (u0) = S ′′
n−1(un)
a "periodikus spline" feltétel.
42.3. Mint látható, a spline interpoláció megtalálása egy egyenletrendszer megoldását követelimeg. Kérdéses, hogy az egyenletrendszer megoldható-e illetve, hogy mennyire gazdaságos eza megoldás. Az derül ki, hogy a gyakorlatban igen kedvező az az eset, amikor
∆i < ∆i−1 +∆i+1
teljesül minden i ∈ 1, . . . , n − 2-re; ahol ∆i = ui+1 − ui. Ez az eset az ún. diagonálisandomináns eset.
42.4. Az, hogy hogyan szervezzük meg a spline-egyenletrendszer kezelését, az rajtunk múlik.Egyik lehetőség, hogy harmadrendű Bézier-görbékből származtassuk a spline-okat: Legyen
Si−1(u) = Bi−1
(u− ui−1
ui − ui−1
),
ahol Bi−1 egy Bézier-görbe a pi−1,q−i−1,q
+i−1,pi kontrollpontokkal. Ilyenkor a spline meghatá-
rozása a q−i−1,q
+i−1 kontrollpontok meghatározásával ekvivalens. (A fenti alak azért kényelmes,
mert az interpolációs feltétel teljesülése világos.)Ekkor a C1 feltétel a
pi − q+i−1
ui − ui−1
=q−i − pi
ui+1 − ui(1 ≤ i ≤ n− 1)
feltételek teljesülését jelenti; míg a C2 feltétel a
pi − 2q+i−1 + q−
i−1
(ui − ui−1)2=
q+i − 2q−
i + pi(ui+1 − ui)2
(1 ≤ i ≤ n− 1)
feltételek teljesülését. A rögzített spline esetében
3q−0 − p0
u1 − u0= t0, 3
pn − q+n−1
un − un−1
= tn (A)
137

a két plusz feltétel; a szabad spline esetében
q+0 − 2q−
0 + p0 = 0, pn − 2q+n−1 + q−
n−1 = 0; (B)
és a periodikus spline esetében pedig
q−0 − p0
u1 − u0=
pn − q+n−1
un − un−1
,q+0 − 2q−
0 + p0
(u1 − u0)2=
pn − 2q+n−1 + q−
n−1
(un − un−1)2(C)
a két plusz feltétel.
138

43. B-spline-ok43.1. A Bézier-görbék önmagukban rosszul approximálnak, a spline interpolációba pedig belevan építve egyfajta instabilitás. Ezen kívül mindkét módszer globális, tudniillik egyetlenegykontrollérték pi megváltozása a teljes görbe lefutását megváltoztathatja. (A végpontok, illetvea rögzített kontrollpontok kivételével.)
A B-spline-ok alternatívát nyújtanak: Ezek paraméteres approximáció módszerek, amelyekformálisan a Bézier-görbékhez hasonlítanak (valójában annak a módszernek az általánosítá-sai), de nem a Bernstein-polinomokat használják fel bázisnak, hanem olyan spline-görbéket,amelyek csak néhány kontollparaméter-értékre nemnullák. Lényegében egy „globális jellegűpolinomiális” egységosztás helyett egy „lokális jellegű spline-függvényes” egységosztást hasz-nálnak.
B-spline függvénybázis
43.2. Tegyük fel, hogy adottak a t0 ≤ . . . ≤ tm csomópontok. Az ezekhez tartozó i-ik,k-adrendű (normalizált) Nk
i B-spline függvényt a kezdő k = 0 esetben a
N0i (t) =
1 ha ti ≤ t < ti+1
0 egyébként
formulákkal definiáljuk; és k > 1 esetén a pedig a
Nki (t) =
0 ha ti = ti+k+1
t− titi+k − ti
Nk−1i (t) ha ti < ti+1 = ti+k+1
ti+k+1 − t
ti+k+1 − ti+1
Nk−1i+1 (t) ha ti = ti+k < ti+k+1
t− titi+k − ti
Nk−1i (t) +
ti+k+1 − t
ti+k+1 − ti+1
Nk−1i+1 (t) ha ti < ti+k és ti+1 < ti+k+1
rekurzióval.Ha a csomópontok egymástól egyenlő távolságra helyezkednek el, akkor uniform B-spline-
okról beszélünk.
43.3. Megjegyzés. A fentiekben tulajdonképpen a jobbról folytonos változatot definiáltuk,ahol minden csomópontban jobbról való folytonosságot írunk elő:
f(ti) = limsti
f(s).
De a balról,f(ti) = lim
stif(s),
folytonos változat is definiálható; ezek csak csomópontokban térhetnek el egymástól. Sőt, azegyes folyonossági kívánalmak az egyes csomópontokban egymástól függetlenül is előírhatóak.
139

Legegyszerűbb, ha az egyes tp csomópontokban külön számontartjuk a baloldali és jobb-oldali,
f(tp−) = limstp
f(t) és f(tp+) = limstp
f(t)
határértékeket.
43.4. Tétel. Az (egyes csomópontokban jobbról/ balról) Nki (t) függvényeknek megvannak
az alábbi tulajdonságai:a.) Az Nk
i (t) függvények polinomiálisak a csomópontok között. (Sőt: legfeljebb k-adfokúpolinomok.)
b.)Nki (t) ≥ 0
Nki (t) = 0 ha t < ti vagy ti+k+1 < t
Nki (t) > 0 ha ti < t < ti+k+1
c1.)Nki (ti−) = 0 és Nk
i (ti+) = 1, ha ti = ti+k < ti+k+1;
Nki (t) folytonos ti-ben, sőt, eltűnik, Nk
i (ti−) = Nki (ti+) = 0, ha ti < ti+k;
c2.)Nki (t) folytonos t-ben, ha ti < t < ti+k+1;
c3.)
Nki (t) folytonos ti+k+1-ben, sőt, eltűnik, Nk
i (ti+k+1−) = Nki (ti+k+1+) = 0, ha ti+1 < ti+k+1;
Nki (ti+k+1−) = 1 és Nk
i (ti+k+1+) = 0, ha ti < ti+1 = ti+k+1.
43.5. Tétel. Legyen m = n+ k. Ekkor
n−1∑i=0
Nki (t) =
0, ha t < t0;
1, ha tk < t < tn;
0, ha tn+k < t.
Speciálisan, (ha jobbról való folytonosságot írunk elő tk-ban, és balról való folytonosságotírunk elő tn-ben, akkor) az Nk
i (i = 0, . . . , n− 1) B-splinefüggvények egységbontást alkotnaka [tk, tn] intervallumon.
43.6. Tétel. (Nem kell vizsgára.) Legyen k ≥ 1. Ekkor a (csomópontokban jobbról/ balról)vett deriváltak:
Ha ti < ti+1 = ti+k+1, akkordNk
i (t)
dt= k
Nk−1i (t)
ti+k − ti;
ha ti = ti+k < ti+k+1, akkor
dNki (t)
dt= −k
Nk−1i+1 (t)
ti+k+1 − ti+1
;
140

ha ti < ti+k és ti+1 < ti+k+1, akkor
dNki (t)
dt= k
(Nk−1i (t)
ti+k − ti−
Nk−1i+1 (t)
ti+k+1 − ti+1
).
Következmény:
43.7. Tétel. Ha tj-ben a multiplicitás s + 1, akkor Nki -nek a k − s-edik jobbról/balról vett
deriváltja még mindig lokális korlátos, következéppen ott lokálisan Ck−s−1.Speciálisan, ha a multiplicitás legfeljebb k, akkor tj-ben lokálisan folytonos; ha a multip-
licitás legfeljebb 1, akkor tj-ben lokálisan Ck−1.
43.8. Ha a k-adik generációs (Nki ) B-spline bázist tekintjük akkor csomópontokat általában
úgy választjuk meg, hogy az első és utolsó k + 1 darab eleme megegyezik: m = n + k, ést0 = . . . = tk, tn = . . . = tn+k. Ezeket a továbbiakban zárt végű spline rendszerekneknevezzük.
Ilyenkor tulajdonképpen a ti = ti+k (i = 0, . . . , n− k) alappontokat használjuk. Látható,hogy ebben az esetben a Nk
i függvények tartója az [t0, tn−k] intervallumra korlátozódik, ésértelemszerű t0-ban jobbról, tn−k-ban balról való folytonosságot előírni.
Továbbá, ilyenkor,
Nk0 (t0) = 1, Nk
1 (t0) = . . . = Nkn−1(t0) = 0,
ésNk
0 (tn−k) = . . . = Nkn−2(tn−k) = 0, Nk
n−1(tn−k) = 1.
43.9. Abban a speciális esetben, amikor t0 = . . . = tk = 0 = t0, és tk+1 = . . . = t2k+1 = 1 = t1(m = 2k + 1, n = k + 1, n− k = 1), akkor
Nki (t) =
(ki
)tk−i(1− t)i = Bk
i (t) (i = 0, . . . , k).
Vagyis a Bernstein-polinomokat kapjuk meg!
43.10. Ha a t1, . . . tn−k−1 csomópontokban a multiplicitás legfeljebb k, akkor az Nki (t) függvé-
nyek folytonosak a [tk, tn] intervallumon. (A tk-ban jobbról, tn-ben balról való folytonosságotelőírva.) [„Folytonos csomópont rendszer”.]
43.11. Ha a t1, . . . tn−k−1 csomópontokban a multiplicitás legfeljebb 1, akkor az Nki (t) függ-
vények Ck−1-ak a [tk, tn] intervallumon. (A tk-ban jobbról, tn-ben balról való folytonosságotelőírva.) [„Ck−1 csomópont rendszer”.]
141

B-spline approximáció
43.12. Tegyük fel, hogy a t0, . . . , tm csomópontok mellett adottak a d0, . . . ,dm kontrollpontokis. (Itt: de Boor-pontok, az általuk meghatározott poligon a de Boor-poligon.) A [tk, tn]intervallumon értelmezett
D(t) =n−1∑i=0
diNki (t)
görbét a (t0, . . . , tm) csomópontvektorhoz tartozó k-adrendű B-spline-görbének nevezzük.
43.13. Tétel. a.) Konvex burok tulajdonság.b.) Affin invariancia tulajdonság.c.) Lokalitás tulajdonság.
43.14. Tétel. a.) (Zárt végű rendszer.) Ha a csomópontrendszerre
t0 = . . . = tk és tk+1 = . . . = tn+k,
akkorD(tk) = d0 és D(tn) = dn−1.
b.) (Lf. k-as belső multiplicitás.) Ha a tk és tn közti pontokban a csomópontok multipli-citása legfeljebb k, akkor D(t) folytonos.
c.) (Lf. 1-es belső multiplicitás.) Ha a tk és tn közti pontokban a csomópontok multipli-citása legfeljebb 1, akkor D(t) Ck−1.
43.15. (Nem kell vizsgára.) A D(t) =∑n−1
i=0 diNki (t) B-spline-görbe deriváltja is B-spline-
görbe, méghozzá olyan, melynek a kontrollpontjai
d′i = k
di − di−1
ti+k − ti, i = 1, . . . , n− 1;
és ígyd
dtD(t) =
n−1∑i=1
d′iN
k−1i (t).
43.16. Tétel. (de Boor–Cox-rekurzió) Legyen t ∈ [tj, tj+1), és legyenek adottak a d0i = di
kontrollpontok. Ekkor a k-adrendű D B-spline-görbe t-beli D(t) értékét a
dr+1i =
dri−1(t)(ti+k−r − t) + dri (t)(t− ti)
ti+k−r − ti
rekurziós formulábólD(t) = dkj
szolgáltatja, ahol dr−1 ≡ drn ≡ 0, r ≤ i− 1− j + k, és i ≤ j.
Ez alapján:
142

43.17. (de Boor-algoritmus) A k-adrendű (jobbról folytonos) B-spline-görbe t paraméter-ponthoz tartozó D(t) értékét a következő módon lehet kiszámolni:
1.) Keressük meg azt az egyértelmű j indexet, melyre tj ≤ t < tj+1.2.) A j − k + 1 ≤ i ≤ j indexekre legyen d0
i = d0i .
3.) Az 0 ≤ r ≤ k − 1 indexekre, és a j − k + 1− r ≤ i ≤ j indexekre, rekurzíve legyen
αri =t− ti
ti+k−r − ti
ésdr+1i = (1− αri )d
ri−1 + αrid
ri .
4.) D(t) = dkj a végeredmény.
Algoritmikus ábra:
dj = d0j(t)
α0j
dj−1 = d0j−1(t)
1−α0j−→ d1
j(t)α0j−1
α1j
dj−2 = d0j−2(t)
1−α0j−1−→ d1
j−1(t)1−α1
j−→α0j−2
α1j−1
. . ....
α0j−k+1
α1j−k+2
αk−1j
dj−k = d0j−k(t)
1−α0j−k+1−→ d1
j−k+1(t)1−α1
j−k+2−→ · · ·1−αk−1
j−→ djk(t) = D(t)
143

44. Összehasonlítás a Lagrange interpolációvalElső látásra a Lagrange-interpoláció teljesen különbözik a B-spline interpolációtól; de (a jel-lemző) különbségek ellenére sok a hasonlóság is.
44.1. Tegyük fel, hogy adottak a t0 < . . . < tn alappontok. Ekkor Lagrange-interpoláció a
Li(t) =n∏j=0j =i
t− tjti − tj
, i = 0, . . . , n
alapfüggvényekkel állítható elő:
f(t) =n∑i=0
xiLi(t).
Ezekre a függvényekre
1 =n∑i=0
Li(t)
teljesül, de az Li függvények tipikusan nem nemnegatívak a [t0, tn] intervallumon, és így akonvex burokban maradás nem teljesül. (Viszont a Lagrange-interpoláció is affin invariáns.)
Mi több, léteznek hasonló rekurzív algoritmusok is a Lagrange-interpoláció előállítására:
44.2. Tétel. Adottak a p0, . . . ,pn pontok a térben. Ezután legyen
p00(t) = p0, . . . ,p
0n(t) = pn,
továbbá minden j ∈ 1, 2, . . . , n, i ∈ 0, 1, . . . , n− j, t ∈ [0, 1] esetén legyen
pri (t) =ti+r − t
ti+r − tipr−1i (t) +
t− titi+r − ti
pr−1i+1 (t).
(Rekurzív definíció.) Ezek közül az utolsó görbe pn0 (t) megegyezik az L(t) Lagrange-interpo-lálttal.
pn = p0n(t)
β0n−1
pn−1 = p0n−1(t)
1−β0n−1−→ p1
n−1(t)β0n−2
β1n−2
pn−2 = p0n−2(t)
1−β0n−2−→ p1
n−2(t)1−β1
n−2−→β0n−2
β1n−3
. . ....
β00
β10
βn−10
p0 = p00(t)
1−β00−→ p1
0(t)1−β1
0−→ · · ·1−βn−1
0−→ pn0 (t) = L(t)
Bizonyítás. Ha a pi-k helyébe 0-kat és egy darab 1-est rakunk (az i-edik pozícióba), akkorellenőrizhető, hogy pont a megfelelő Li(t) bázisfüggvényt kapjuk meg.
A Lagrange-interpoláció ilyen előállítását Aitken-eljárásnak (algoritmusnak) hívjuk.
144

45. Bézier-felületek45.1. A Bézier-görbéket lehet általánosítani felületekre. A gyakorlatban ezek is inkább olyanépítőelemek szerepét töltik be, amelyekből bonyolultabb felületeket lehet összerakni.
Bézier-háromszögfelületek
45.2. Ha három független pont, a,b, c, adott a síkban vagy térben, akkor a síkjukban mindenp pont egyértelműen áll elő
p = ua+ vb+ wc
alakban, aholu+ v + w = 1.
Az ilyen kombinációkat hívjuk affin kombinációknak; u, v, w-t pedig a p pont (a,b, c-re vo-natkozó) baricentrikus koordinátáinak.
Abban az esetben, amikor még u, v, w ≥ 0-t is megköveteljük, akkor konvex kombinációkrólbeszélünk, és ilyen alakban éppen az a,b, c által kifeszített háromszöglap pontjai álnak elő.
45.3. A Bézier-felületdarabot a Bézier-görbééhez hasonló algoritmussal állíthatjuk elő. Ki-indulunk véges sok pontból, és a végén kapunk egy B(u, v, w) felületet, amely u, v, w ≥ 0,u+v+w = 1-ra van értelmezve. Valójában az u, v, w = 1−u−v helyett elég lenne az u, v koor-dinátákat használni, de most demokratikusan inkább három koordinátát használunk. (Analógmódon, de éppen ellenkezőleg, Bézier-görbéknél viszont használhattuk volna az s = 1 − t, tkoordinátákat, de inkább csak t-t használtuk.)
45.4. Egészen pontosan kiindulunk api,j,k
pontokból, aholi+ j + k = n, i, j, k ∈ 0, . . . , n.
Ezek alkotják a 0-ik generációt:
p0i,j,k(u, v, w) = pi,j,k.
Ezek után rekurzíve definiáljuk a sorra következő generációkat. Az r + 1-ik generáció:
pr+1i,j,k(u, v, w) = upri+1,j,k(u, v, w) + vpri,j+1,k(u, v, w) + wpri,j,k+1(u, v, w),
aholi+ j + k = n− r, i, j, k ∈ 0, . . . , n.
Az utolsó generáció szolgáltatja a Bézier-felületet:
B(u, v, w) = pn0,0,0(u, v, w).
Ábra!
145

45.5. Ezen a módon egy háromszögsémába rendezett pont (n+1)(n+2)2
-esból egy polinomiálisháromszögfelület képződik.
Könnyen meggondolható hogy a háromszögfelület csúcspontjainak a kiinduló csúcspontokfelelnek meg:
B(1, 0, 0) = pn,0,0,
B(0, 1, 0) = p0,n,0,
B(0, 0, 1) = p0,0,n.
Továbbá, a háromszögfelület oldalainak (az u = 0, v = 0, illetve w = 0 eseteknek) pedigBézier-görbék fognak megfelelni. Például a Bézier-felület
B(1− t, t, 0)
„széle” az éppen apn,0,0,pn−1,1,0,pn−2,2,0, . . . ,p0,n,0
„szélső” pontok által generált Bézier-görbét adja.
45.6. Lemma.B(u, v, w) =
∑i,j,k≥0i+j+k=n
n!
i!j!k!uivjwkpi,j,k.
Deriváltak számolhatók, ezek felületillesztésnél figyelembe vehetőek, stb.
Bézier-négyszögfelületek
45.7. Praktikus okok miatt, vagy éppen megszokásból szoktak Bézier-négyszögfelületeket ishasználni. Ilyenkor a
pi,j
pontokból indulunk ki, ahol
i ∈ 0, . . . , n, j ∈ 0, . . . ,m.
A cél egy polinomiálisB(u, v)
felület, aholu ∈ [0, 1], v ∈ [0, 1].
45.8. Az előállító algoritmus a következő:A kiinduló generációt a kiinduló pontok adják:
p0,0i,j (u, v) = pi,j,
aholi ∈ 0, . . . , n, j ∈ 0, . . . ,m.
Ezután rekurzíve gyárthatunk új generációkat az egyik vagy a másik változóban:
pr+1,si,j (u, v) = (1− u)pr,si,j + upr,si+1,j,
146

aholi ∈ 0, . . . , n− r − 1, j ∈ 0, . . . ,m− s;
illetvepr,s+1i,j (u, v) = (1− v)pr,si,j + vpr,si,j+1,
aholi ∈ 0, . . . , n− r, j ∈ 0, . . . ,m− s− 1.
A legutolsó generáció adja a Bézier-felületet:
B(u, v) = pn,m0,0 (u, v).
45.9. Látható, hogy az (r+ 1, s+ 1) generáció az (r+ 1, s) és (r, s+ 1) generációból is előál-lítható. Meg lehet mutatni, hogy bármilyen módon is próbálunk az (r+1, s+1) generációhozeljutni, az eredmény ugyanaz lesz.
Illusztrációként: Ap0,0,p0,1,p1,0,p1,1
pontokból kiindulva,
p0,10,0(u, v) = (1− v)p0,0 + vp0,1, p0,1
1,0(u, v) = (1− v)p1,0 + vp1,1;
ésp1,00,0(u, v) = (1− u)p0,0 + up1,0, p1,0
0,1(u, v) = (1− u)p0,1 + up1,1;
de mindegyik alapján
p1,10,0(u, v) = (1− u)(1− v)p0,0 + (1− u)vp0,1 + u(1− v)p1,0 + uvp1,1.
Itt (és általában) az u és v szerepe lényegében független. [És tulajdonképen ez a kulcslépés ajóldefiniáltság igazolásában.]
45.10. Hasonlóan mint korábban, meggondolható, hogy a csúcspontokra
B(0, 0) = p0,0, B(0, 1) = p0,m, B(1, 0) = pn,0, B(1, 1) = pn,m;
illetve a Bézier-négyszögfelület „szélei" a „szélső” alappontokból képzett Bézier-görbék.
45.11. Meggondolható, hogy négy általános (p0,0,p0,1,p1,0,p1,1) pontra illeszkedő Bézier-négyszögfelület egy nyeregfelület (hiperbolikus paraboloid) lesz.
45.12. Lemma.
B(u, v) =n∑i=0
m∑j=0
(ni
)(mj
)(1− u)n−iui(1− v)m−jvj pi,j.
A Bézier-négyszögfelület készítése ∼ két szimultán Bézier-görbeállítás. Deriváltak számol-hatók, ezek felületillesztésnél figyelembe vehetőek, stb.
147

46. Racionális approximáció
46.1. Természetes módon adódó kérdés: Hogyan approximálhatunk/ interpolálhatunk a pro-jektiv síkon (térben).
Ötlet: Ha adottak az p0, . . . ,pn alappontok, akkor veszünk olyan xi vektorokat, hogypi = [xi], majd elkészítünk egy x(t) approximáló/ interpoláló görbét az xi pontokhoz, majdennek vesszük a p(t) = [x(t)] projektivizáltját. Ez így lényegében működik is, de:
i.) A xi vektorreprezentánsak választása nem egyértelmű, és ez befolyásolja az approxi-máló/ interpoláló görbét is.
ii.) a jóldefiniáltság érdekében: úgy kell x(t)-t elkészítünk, hogy x(t) = 0 legyen mindent-re.
46.2. Lássuk, hogyan működik mindez a Bézier-görbék esetén:Tegyük fel, hogy adottak a p0 = (x0, y0), . . . ,pn = (xn, yn) pontok. Ezeknek a projektív
reprezentánsai x0 = ⟨w0x0, w0y0, w0⟩, . . . ,xn = ⟨wnxn, wnyn, wn⟩ alakúak, ahol wi = 0.A x0, . . . ,xn pontokból képzett Bézier-görbe a
x(t) =n∑i=0
xiBni (t) =
⟨n∑i=0
wixiBni (t),
n∑i=0
wiyiBni (t),
n∑i=0
wiBni (t)
⟩
(t ∈ [0, 1]) görbe. A projektivizált a
p(t) =
[n∑i=0
xiBni (t)
]=
[n∑i=0
wixiBni (t),
n∑i=0
wiyiBni (t),
n∑i=0
wiBni (t)
]=
=
(∑ni=0wixiB
ni (t)∑n
i=0wiBni (t)
,
∑ni=0wiyiB
ni (t)∑n
i=0wiBni (t)
)=
∑ni=0wipiB
ni (t)∑n
i=0wiBni (t)
.
görbe. Végül is tehát
p(t) =
∑ni=0wipiB
ni (t)∑n
i=0wiBni (t)
.
Vagyis, az eredmény egy, a wi súlyokkal súlyozott racionális görbe – „racionális Bézier-görbe” lesz. A görbe biztos jóldefiniált lesz, ha a súlyok mind pozitívak. Ha a súlyok egyenlőek,akkor a p0, . . . ,pn pontokhoz tartozó közönséges Bézier-görbét kapjuk vissza.
Látható, hogy a racionális Bézier-görbe projektív képe megintcsak egy racionális Bézier-görbe – de tipikusan másfajta súlyokkal.
46.3. Hasonló módon kaphatjuk a
d(t) =
∑n−1i=0 widiN
ki (t)∑n−1
i=0 wiNki (t)
.
k-adfokú racionális B-spline görbéket, stb.
Az elv természetesen felületek esetén is alkalmazható.
148
47. Irodalmi útmutatóA klasszikus geometiai alapokat összefoglalja (sőt, a projektív geometria alapjaiba is beveze-tést nyújt):
• Hajós György: Bevezetés a geometriába. 10. kiad. Nemzeti Tankönyvkiadó, Budapest,2006.
A projektív geometria (új) alapkönyve:
• Csikós Balázs, Kiss György: Projektív geometria. Polygon Jegyzettár. Szegedi EgyetemiKiadó, Polygon, Szeged, 2011.
Barátságos bevezető a (legfeljebb három dimenziós) klasszikus differenciálgeometriába:
• Szolcsányi Endre: Differenciálgeometria és vektoranalízis. ELTE egyetemi jegyzet, J3–748. 10. kiad. Nemzeti Tankönyvkiadó, Budapest, 1997.
A haladóbb klasszikus differenciálgeometriai könyvek/jegyzetek között egy könnyen elérhető:
• Verhóczki László: Differenciálgeometria I. Interneten elérhető jegyzet.http://www.cs.elte.hu/geometry/vl/dgjegy11.pdf
A görbék és felületek számítógépes előállítására vonatkozóan a
• Kurusa Árpád, Szemők Árpád: A számítógépes ábrázoló geometria alapjai. PolygonJegyzettár. Polygon, Szeged, 1999.
könyvből lehet tájékozódni.Az angol nyelvű standard bevezető a számítógépes ábrázoló geometria (Computer Aided
Geometric Design) területére:
• Gerald Farin: Curves and Surfaces for CAGD. A Practical Guide. 5th ed., MorganKaufmann Publishers, San Francisco CA; Academic Press, San Diego CA; 2002.
A (jelen jegyzetben sajnos egyáltalán nem szereplő) geometriai algoritmusokat illetően
• Szabó László: Kombinatorikus geometria és geometriai algoritmusok. Polygon Könyv-tár. Polygon, Szeged, 2003.
az ajánlott könyv.
149