aerodynamic performance of a wind-turbine rotor by...
TRANSCRIPT

Master of Science Thesis
Aerodynamic performance of a wind-turbine rotor
by means of OpenFOAM
by
Evangelos Giannopoulos
November 2016
KTH Royal Institute of Technology
Department of Mechanics
SE-100 44Stockholm, Sweden
2
TITLE: Aerodynamic performance of a wind-
turbine rotor by means of OpenFOAM
AUTHOR: Evangelos Giannopoulos
SUPERVISOR: Dr. Antonio Segalini
PARTNER: KTH Royal Institute of Technology
INSTITUTION: Department of Mechanics
INDUSTRIAL PARTNER: Vattenfall AB (YRLF)
INDUSTRIAL SUPERVISOR: Eric Lillberg
NUMBER OF PAGES: v, 43

i
Abstract
In order for wind-farm operators to deal with challenges regarding their fleet
management, it is useful for them to estimate their units’ performance for
different conditions. To perform such estimations, Computational Fluid
Dynamics (CFD) may be used.
This project focuses on the development of a CFD model for the aerodynamic
analysis of wind turbine rotors, depending on their surface roughness. The work
has been carried out in collaboration with the KTH Royal Institute of Technology
and the Vattenfall AB R&D department.
The open-source software OpenFOAM has been used to develop the desired
model. A rigid body incompressible steady state, Reynolds-Averaged Navier-
Stokes equations, k – ω SST CFD case has been set up. The NREL 5-MW rotor
geometry has been used and the effect of four different surface roughness height
values {1mm, 0.5mm, 100 μm, 30 μm} on its aerodynamic performance has
been investigated for an incoming wind velocity of 10m/s. The referred
roughness height values have been applied on the whole rotor surface. A 120°
wedge type computational domain of unstructured mesh has been developed for
the present simulations.
The results indicate that a roughness-height increase leads to earlier flow
separation over the blade suction side and increases the turbulent area of the
boundary layer. That leads to a decrease for the extracted Torque and the Thrust
force on the wind turbine rotor. Moreover, it is concluded that the rotor
aerodynamic performance is more sensitive to low roughness heights rather than
to high ones.
Key words: wind turbine, rotor, performance, CFD model, boundary layer,
roughness

ii
Acknowledgements
At this point I would like to thank my supervisors, Dr. Antonio Segalini from the
Mechanics department of the KTH Royal Institute of Technology and Eric
Lillberg from the Vattenfall AB R&D department. I appreciate their patience and
the guidance that they have both offered me throughout this work.
I would also like to thank the colleagues from Vattenfall AB for creating a
motivating but also relaxed working environment for me throughout this project.
Special thanks to Panos Jagalos from the Vattenfall AB Wind team for his
unconventional support and professional guidance.
Thanks to Prof. Vasilis Riziotis and Dr. Dimitris Manolas from the Fluids
department of the National Technical University of Athens Mechanical
Engineering school for their support throughout this work.
Thanks to Hugo Olivares Espinosa, from the Earth Science department of the
Uppsala University, for sharing parts of his work.
Last but not least, thanks to all my friends and family members for their support
throughout every step of my life. It was only with your help that I have managed
to carry out this effort.

iii
Contents
1. INTRODUCTION ........................................................................................... 1
1.1 Motivation and Objectives .......................................................................................... 4
1.2 Thesis layout ............................................................................................................... 7
2. THEORY AND BACKGROUND ....................................................................... 9
2.1 Wind Turbine Aerodynamics ....................................................................................... 9 2.1.1 2D Aerodynamics ....................................................................................................... 11 2.1.2 Boundary Layer and Separation ................................................................................. 12 2.1.3 Skin Friction Drag ....................................................................................................... 13 2.1.4 Pressure Drag ............................................................................................................. 14 2.1.5 The effect of roughness .............................................................................................. 14
2.2 The Reynolds-Averaged Navier-Stokes equations ......................................................14
2.3 Using Computational Fluid Dynamics .........................................................................17
2.4 Related studies done .................................................................................................18 2.4.1 The NREL 5MW wind turbine ..................................................................................... 18 2.4.2 Studies on roughness ................................................................................................. 19
3. PREPROCESSING ....................................................................................... 21
3.1 Mesh .........................................................................................................................21
3.2 Boundary conditions and numerical schemes ............................................................24
3.3 Wall function .............................................................................................................25
3.4 The Multiple Reference Frame approach ...................................................................26
4. RESULTS AND DISCUSSION ........................................................................ 28
4.1 Smooth surface results ..............................................................................................28 4.1.1 Relative velocity around the blade ............................................................................. 28 4.1.2 The wake behind the rotor ......................................................................................... 30
4.2 The effect of roughness .............................................................................................35
5. CONCLUSION AND OUTLOOK .................................................................... 39
5.1 Thesis outcome ..........................................................................................................39
5.2 Future work ...............................................................................................................40
APPENDIX A. OPENFOAM FVSCHEMES FILE ....................................................... 41
APPENDIX B. ROUGHNESS EFFECT ON BL AND K ............................................... 42
REFERENCES ...................................................................................................... 45

iv
Nomenclature
BC Boundary Condition(s)
CFD Computational Fluid Dynamics
CV Control Volume
DNS Direct Numerical Simulations
HAWT Horizontal Axis Wind Turbine
k Turbulent kinetic energy
LES Large Eddy Simulations
MRF Multi Reference Frame
NREL National Renewable Energy Laboratory
nut Kinematic turbulence viscosity
PDE Partial Diferential Equations
r Radial distance from the axis of rotation
RANS Reynols Averaged Navier Stokes
Re Reynolds number
RET Renewable Energy Technology
SST Shear Stress Transport
TSR Tip Speed Ratio
u flow velocity
Urel Relative velocity
VAWT Vertical Axis Wind Turbine
WT Wind Turbine
WTs Wind Turbines
2D Two dimensional
δ Boundary Layer thickness
ω Turbulence dissipation rate
ρ Fluid density

v
List of Figures
Figure 1.1. OECD electricity generation from renewables: 1971-2014 [3] .................1 Figure 1.2. CO2 emissions per kWh of electricity generation [3] ................................1
Figure 1.3. Increase in the global installed wind capacity [5] ......................................2 Figure 1.4. Electricity production wind capacity in Sweden ........................................2 Figure 1.5. Vattenfall's Wind Power Generation since 2011 [8] ...................................3 Figure 1.6. Main components of a HAWT [11] ............................................................4 Figure 1.7. Schematic 2-D representation of surface roughness [13] ...........................5 Figure 1.8. Different roughness sources [14] ................................................................5 Figure 1.9. Vortex generators on WT blades [15], [16] ................................................6 Figure 1.10. Work flow chart of the thesis' main core ..................................................7 Figure 2.1. Schematic representation of the distribution of axial velocity and pressure
along the rotor axis [17] ..............................................................................................10
Figure 2.2. Schematic representation of the aerodynamic forces generated by an airfoil
..................................................................................................................................... 11 Figure 2.3. Generic profile of the BL over a flat plate [21] ........................................12
Figure 2.4. Attached (a) and separated flow (b) around an airfoil [24] ......................13 Figure 3.1. Domain’s boundaries ................................................................................22 Figure 3.2. Mesh refinement close to the blade, r/R=0.71 ..........................................22 Figure 3.3. Layering around the blade ........................................................................23
Figure 3.4. A zoom in the layers around the blade ......................................................23 Figure 3.5. Blade along with spinner ..........................................................................24
Figure 3.6. Rotational (red) and stationary (grey) regions ..........................................26 Figure 3.7. Air modeled to rotate around the blade in the rotating region ..................27 Figure 4.1. relative velocity distribution, r/R=0.08 ....................................................28
Figure 4.2. relative velocity distribution, r/R=0.16 ....................................................29
Figure 4.3. Relative velocity distribution, r/R=0.48 ...................................................29 Figure 4.4. relative velocity distribution, r/R=0.71 ....................................................29 Figure 4.5. Streamlined representation of the relative velocity field, r/R=0.71 .........30
Figure 4.6. Velocity wake behind the blade, plane in the direction normal to the blade
motion, domain of ~13M cells ....................................................................................31
Figure 4.7. Velocity wake behind the blade, plane in the direction normal to the blade
motion, domain of ~24M cells ....................................................................................31
Figure 4.8.Velocity wake behind the blade, plane in the direction normal to the blade
motion, domain of ~33M cells ....................................................................................32 Figure 4.9.Velocity wake behind the blade, blade cross sectional plane at 40m height,
view from above, blade motion from bottom to top, domain of ~13M cells ..............32
Figure 4.10. Velocity wake behind the blade, blade cross sectional plane at 40m height,
view from above, blade motion from bottom to top, domain of ~24M cells ..............32 Figure 4.11. Velocity wake behind the blade, blade cross sectional plane at 40m height,
view from above, blade motion from bottom to top, domain of ~33M cells ..............33 Figure 4.12.Rotor power predictions for different incoming wind velocities ............34 Figure 4.13. Rotor Thrust for different incoming wind velocities ..............................35 Figure 4.14. Relative velocity around a smooth and a rough blade, at r/R=0.71,
TSR=7.53, rotor diameter=126m ................................................................................36
Figure 4.15. Streamlined relative velocity around a smooth and a rough blade, at
r/R=0.71, TSR=7.53, rotor diameter=126m ................................................................36 Figure 4.16. Roughness effect on Torque ...................................................................37 Figure 4.17. Roughness effect on Thrust ....................................................................37

1
1. Introduction
Over the past decades there has been a growing concern about the world’s climate
change. Mitigation of carbon dioxide (CO2) emissions has been high in the agenda of
the Paris climate conference (COP21) in December 2015. The final agreement focuses
on limiting the world average temperature increase below 2°C as well as the need for
global emissions to peak as soon as possible. The EU has approved the April-2016-
Paris agreement putting it in force since 4 November 2016 [1]. According to the
International Energy Agency (IEA) 2016 World Energy Outlook [2], although the CO2
emissions for 2015 have stalled, the current reduction rates are not enough to support
limiting global warming by less than 2 °C. Based on the same report and the IEA 2040
scenario, the estimated continuous growth in energy-related CO2 emissions by 2040
means that we are far from keeping close to the Paris Agreement’s goal to reach a peak
in emissions as soon as possible.
Securing further CO2-emissions-free energy sources seems necessary in order to
develop a sustainable society. Renewable Energy Technology (RET) has already been
playing a key role to that and the relevant power production has increased its world
share over the past years. The IEA has reported a significant growth of electricity
generation from renewables across the OECD countries over the past 20 years, as may
be seen in Figure 1.1. That growth goes with a total reduction rate in the carbon
intensity of electricity generation, which is stronger for the European part of the OECD
countries, as shown in Figure 2.1. [3]
Figure 1.1. OECD electricity generation from renewables: 1971-2014 [3]
Figure 1.2. CO2 emissions per kWh of electricity generation [3]

2
Wind power generation, in particular, has been showing an average annual growth rate
of 22.1% for the period 1990-2015, within the OECD countries [4]. As reported from
the Global Wind Energy Council and shown in Figure 1.3, since 2000, the global annual
installed wind capacity has been growing steadily, with the exception of year 2013.
Especially after 2006, it seems that there has been a boost in the added wind capacity
worldwide [5].
Figure 1.3. Increase in the global installed wind capacity [5]
Sweden has been following the same trend while increasing its existent wind capacity
from almost 0.3 GW in 2006 to over 6 GW in 2015, as reported from the Wind Energy
Market Intelligence [6]. Figure 1.4 tracks the Swedish growth back to 1997.
Figure 1.4. Electricity production wind capacity in Sweden
The Swedish state-owned power producer Vattenfall AB, shifting its strategy towards
Wind Energy, has been steadily increasing its wind power generation since 2011. The
increase has been dramatic in 2015 as shown in Figure 1.5. [7], [8]

3
Figure 1.5. Vattenfall's Wind Power Generation since 2011 [8]
The figures above indicate that wind will possibly be among the main energy sources
of the upcoming years. Thus, a deep interest arises on the efficiency of wind power
units throughout their lifecycle. In order for Wind Energy to be economically viable,
the overall costs per power unit produced need to decrease.
Although new WT designs and innovative control systems have continuously been
developed, old units’ performance should not be neglected. According to the
International Renewable Energy Agency, a lifecycle cost breakdown for wind power in
seven countries has shown that Operation and Maintenance (O&M) costs account for
11% – 30% of the total Levelized Cost Of Energy of onshore units [9].
In order for a wind-farm operator to keep down the O&M costs, it is important to know
how to use the available equipment in the optimum way. To this end, it is crucial to be
updated on each unit’s components condition and expected performance. This way,
activities related to repairing, ordering new parts or not changing the status of a wind
unit can be better scheduled. The above process is summarized by the term fleet
management.
A key part of fleet management is estimating the performance of a wind turbine’s rotor
according to several parameters affecting it. Prior to getting into details of its
performance, it is worth describing what a wind turbine (WT) is as well as highlighting
its basic components.
Wind turbines (WTs) are machines designed to interact with the wind in a way that they
extract part of its kinetic energy converting it to useful mechanical energy. For most
WTs, this mechanical energy is used to rotate a moving component which, in turn,
induces rotation to a shaft mounted on a power generator. In other words, part of the
wind’s kinetic energy is transformed to shaft rotational speed necessary for a generator
to produce power. Depending on the direction of the shaft’s axis of rotation, such WTs
may be categorized in Horizontal Axis Wind Turbines (HAWTs) and Vertical Axis
Wind Turbines (VAWT) [10]. HAWTs dominate the share of installed wind power
3.4 3.63.9 4.1
5.8
0.8 0.7 0.6 0.7 0.9
0
1
2
3
4
5
6
7
2011 2012 2013 2014 2015
Win
d P
ow
er G
ener
atio
n [
TWh
]
Year
Vattenfall Wind Power Generation
Total Generation Generation in Sweden

4
capacity worldwide. The dominance of HAWT over VAWT also applies for the
activities of Vattenfall AB in collaboration with which this thesis has been carried out.
For this reason, the present work has been focused solely on the performance of
HAWTs.
The basic components of a HWAT are illustrated in Figure 1.6 and briefly described
below.
Figure 1.6. Main components of a HAWT [11]
Rotor: consists of the blades (or wings) and the spinner that is the connection between
the blades and the rotating shaft. Through the rotor, kinetic energy is extracted from the
wind so as to induce torque to the generator shaft.
Nacelle: hosts the gearbox and the power generator. The gearbox is placed between the
rotor and the generator. The rotor is not straightly connected to the shaft that is mounted
on the generator but rather to a larger low-speed shaft, able to stand big loads. The role
of the gearbox is to transform the low rotational speed of the large shaft to a high
rotational speed of the shaft mounted on the generator. The generator, is the actual
power-producing part of a WT.
Tower: it is where the nacelle-rotor system is based. It used to keep the rotor part on a
height that would let it experience higher wind velocities [10].
1.1 Motivation and Objectives
As mentioned earlier, the rotor performance is of high importance and its analysis is a
key part of the fleet management. Depending on the specific interest of the analysis,
performance may be measured in various ways. In this thesis performance is measured

5
in terms of Torque, Mechanical Power and Thrust that are analyzed in the next chapter.
What should be stressed is that the rotor performance is a result of various parameters,
the effect of which cannot be measured just by a change in the WT power output. A
way to overcome this obstacle and study the effect of a single parameter on the rotor
performance is by developing a model. The latter is by definition an approximation of
reality, where certain parameters affecting the investigated final result are kept constant
while the rest (variables) are given a degree of freedom. In this way, it is possible to
investigate the relationship among variables or their effect on the final result.
A parameter affecting the rotor performance is its surface roughness or simply
roughness. The latter refers to the variations in the height of the surface relative to a
reference plane [12]. Even for the smoothest surface, a very close look would reveal a
pattern qualitatively similar to the one in Figure 1.7 (two dimensional representation),
in which the mentioned reference plane is denoted as Mean Line.
Figure 1.7. Schematic 2-D representation of surface roughness [13]
For a WT rotor, roughness is an undesired characteristic that acts against its optimum
performance causing Mechanical Power output loss. Roughness may be caused by
various reasons such as dust particles transported within the wind, icing, insects hitting
the blades or erosion of the surface material as shown in Figure 1.8.
Figure 1.8. Different roughness sources [14]
A more detailed explanation on how roughness influences the performance of a WT
rotor is given in the relevant section of chapter 2. What is more important to understand
at this stage is how a WT operator may utilize information on the rotor’s surface
roughness to estimate its performance.
Although roughness is something that a WT operator may observe physically, it cannot
be straightly linked to a specific range change in the rotor’s performance. Based on
what has been explained above, a model can help in developing such a link. In other

6
words, a model may serve as a tool for an operator to translate the observed roughness
into an estimated change in the performance.
Taking a step further, different parameters may act in favor of the performance. A slight
change on the blades geometries by means of passive aerodynamic add-ons may be
considered as such. Passive aerodynamic add-ons are devices that are mounted on the
blades of a WT in order to help the rotor better react with the incoming wind flow and
extract more energy from it. An example of such add-ons is vortex generators (VGs)
that are shown in Figure 1.9. The left hand side of Figure 1.9 shows a real example of
VGs mounted on a blade section while the right hand side of the figure is a
representation of how VGs are placed on a WT rotor. In certain cases, VGs may be used
to recover some of the lost Mechanical Power due to the existence of roughness. They
can be incorporated in a model and act as another variable in the estimated performance
output.
Figure 1.9. Vortex generators on WT blades [15], [16]
The main objective of this work is to study the effect of roughness on the rotor
performance by means of Computational Fluid Dynamics (CFD). The latter allows to
model the flow around a WT rotor and estimate its performance by changing the desired
variables. It should be stressed that the actual focus is on capturing the change that
roughness induces in an estimated rotor performance rather than the accuracy of the
estimated performance itself.
A side goal is to develop a CFD tool that may serve as the basis for future parametric
studies on the performance of WT rotor, such as the one related to the influence of
VGs on it.
This project may also serve as a feasibility study, used to evaluate whether or not it is
worthy for an operator to further investigate on the above and move towards the
development of a highly accurate model.
An extra interest is on checking what it takes for such a tool to be developed by means
of the software OpenFOAM. The main reason for that is that OpenFOAM is an open-
source software, free of license-costs. Although a detailed manual is not available and
it takes some time for a beginner to become familiar with its use, it still seems to be a
sustainable investment, in the long run, for an organization to train its engineers on the
use of a simple software like that rather taking on high costs for more user-friendly
ones. Moreover, OpenFOAM allows a lot of interaction with the user giving the
freedom to manually set the equations and parameters describing a case.

7
1.2 Thesis layout
During the main core of this work, two main steps have been followed:
(a) The development of a CFD model for the simulation of a smooth surface rotor
(b) The study of the roughness effect on the performance of the same rotor
The above becomes clearer in a work flow chart representation made through Figure
1.10 below.
Figure 1.10. Work flow chart of the thesis' main core
It should be clarified that only the rotor of the selected WT is examined, without any
interaction with other WT components.
The biggest challenge is to create the initial model for a rotor with a smooth surface.
Once this is done, then the roughness performance effects investigation come as a faster
process.
The present report consists of four main sections. Starting with Chapter 2, the theory
behind the intended model development is described. At first, the basic principles of
WT aerodynamics are presented. What follows is an explanation of how the flow
boundary layer (BL) develops around a WT blade. Based on the latter, a description of
the Lift and Drag forces generation is made. It is, then, discussed how roughness is
expected to affect the aerodynamic performance of a WT rotor. Following to that we
show how we may move from a qualitative description of the wind flow around a WT
rotor to a quantitative one. To this end, the Navier-Stokes equations are presented along
with the way in which a Reynolds-Averaged Navier-Stokes model of two supporting
equations is developed after introducing turbulence to the problem. The need of
computer power for solving such problems is then stressed out. Finally, we highlight
similar studies done on smooth rotors and studies done on the effect of roughness on
the aerodynamic performance of rotors and airfoils.
In Chapter 3, a description of the CFD case setup is made. The characteristics of the
computational domain are defined as well as the boundary conditions of the problem.
We close the chapter by describing how the flow is solved in OpenFOAM by applying
the Multiple Reference Frame approach.
Chapter 4 is dedicated to the model output. At first, it is shown that a boundary layer
may be captured with the chosen case setup. We then present the CFD model’s output
for a smooth rotor in section 4.2, as shown in Figure 1.10. Before moving further, we

8
examine the effect of the near wake grid resolution on the developed model. After it is
checked that the physical meaning of the produced flow field is acceptable, we compare
the performance results of four different incoming wind velocities with other studies
done on the same rotor and with similar methods. Moving to section 4.3, the lightest
case version of the tried near wake grid resolutions, in terms of computational cost, is
selected and four different roughness heights are tried in the model for an incoming
wind velocity of 10m/s. The resulting trend is, then, compared with similar studies on
different rotors as well as with relevant observations made on airfoils’ performance.
We close the report with Chapter 5 where the main conclusions of the study are
summarized and recommendations for future work are made.

9
2. Theory and Background
In order to better understand and assess the results of the developed model, it is
necessary that the basic theory behind the investigated phenomena and the used method
is mentioned. The chapter starts with a description of basic principles related to WT
rotor aerodynamics and the forces acting on its blades. A closer look is, then, taken on
how the wind flow moves at a close distance around the blades’ surface, creating the
so called boundary layer (BL), as well as on the way that the latter is related to the
generated aerodynamic forces on the blades. In addition, the effect of roughness on the
aerodynamic forces acting on the rotor, changing its performance, is explained.
After a qualitative analysis of the examined phenomena, the need for a quantitative
description of the above is stressed. To this end, the use of Computational Fluid
Dynamics and the need of computing power are mentioned. What is described in
particular, are the Reynolds-Averaged Navier-Stokes equations along with the k – ω
SST turbulence model that completes them.
Finally, the main outcome of the most interesting studies examined during the project’s
literature review is highlighted and summarized in the chapter’s last section.
2.1 Wind Turbine Aerodynamics
As briefly explained in Chapter 1, a wind turbine extracts kinetic energy from the wind
and converts it to mechanical energy used to increase the rotational speed of a shaft.
Moreover, using the first law of thermodynamics and considering an isothermal flow,
which is usually the case for flows around WTs, we may end to the following relation
(eq. 2-1):
�̇� (𝑈2
2
2−
𝑈12
2) = −�̇�
(2-1)
which states that the change of kinetic energy of the flow in a streamtube equals to the
rate of work done by the system.
Taking into account the above, an incoming wind flow of velocity 𝑈∞ hitting a WT
rotor (simply rotor from now on) will be slowed down. The reduction of the wind flow
velocity is related to the kinetic energy extracted from it. At a specific snapshot of the
phenomenon, one may observe that the fluid particles that exchange energy with the
rotor affect the ones that have not yet reached it and so on. Furthermore, the particles
that have already exchanged energy with the WT rotor have been decelerated up to a
certain asymptotic value 𝑈𝑤. This becomes clearer in Figure 2.1.a that is a simplified
version of a top view of a rotor. The particles that are on the cross line defined by the
rotor have a velocity of 𝑈𝑑.
In addition, using Bernoulli’s theorem, for a steady flow, the compressibility and
viscosity of which are negligible, and for which the there is no change in the
gravitational potential energy occurs, pressure (p) and velocity (U) are related through
the following expression (eq. 2-2):

10
Figure 2.1. Schematic representation of the distribution of axial velocity and pressure along
the rotor axis [17]
𝑝
𝜌+
𝑈2
2= 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡
(2-2)
where ρ is the fluid (air for this study) density.
Since the wind velocity decreases in the way described above when hitting a rotor and
taking into consideration eq. 2-2, the pressure of the wind flow is expected to increase
from a free-stream point value 𝑝∞ to a value 𝑝𝑢 right before the rotor, drop drastically
right after the rotor to a value of 𝑝𝑑 and start increasing again till reaching the free-
stream value 𝑝∞. The above becomes clearer in Figure 2.1.b.
The wind applies a total force on a rotor of a diameter (d) that may be expressed as (eq.
2-3):
𝑇 = (𝑝𝑢 − 𝑝𝑑)𝐴𝑑 (2-3)
where 𝐴𝑑 is the rotor swept area (𝐴𝑑 = 𝜋𝑑2
4).
The T force is not equally distributed along the rotor blades. We call Thrust the
integrated T component in the direction of the rotor axis. In a similar way, the
integrated cross product of the local T components in the direction of the blade motion
with the local distance from the rotor axis (r) is called Torque. A clearer explanation
of Thrust and Torque is provided in section 2.1.1.
The Torque multiplied by the rotational speed of the shaft attached to the rotor gives
the mechanical power (Power in this report) of the latter.
The ratio of the Power to the available power in the wind (1
2𝜌𝐴𝑑𝑈∞
3 ) is defined as
power coefficient 𝐶𝑃.
Based on the Actuator Disk theory, it may be shown that for the power coefficient
there is a maximum of: 𝐶𝑃,𝑚𝑎𝑥 =16
27≈ 0.593

11
The above maximum is also called the Betz limit and it is an important note to be made
in order to understand that there is a maximum in the power that can be extracted from
the wind [17].
2.1.1 2D Aerodynamics
A clear way to understand how energy may be extracted from the wind and be
converted into mechanical power of the rotor is by looking at the forces acting on a
blade cross section (airfoil)1. This lead us to a two dimensional (2D) analysis as in
Figure 2.2 below.
Figure 2.2. Schematic representation of the aerodynamic forces generated by an airfoil
The point that first faces the flow is called leading edge while the point last being in
touch with it is called trailing edge. The chord is the line section connecting the leading
edge and the trailing edge. The angle of attack (α) is the angle between the Urel vector
and the chord. The upper-curved side of the airfoil is called the suction side and it is
the side where low pressure occurs for the flow, while the opposite side is the pressure
side where the flow pressure is higher than the one over the suction side [17].
The relative velocity 𝑈𝑟𝑒𝑙 is the actual flow velocity that the airfoil experiences. Its
vector is composed by adding the vector of the incoming wind velocity (𝑈∞) to the
vector of the blade cross section’s tangential velocity (𝑈𝑡𝑎𝑛𝑔 = 𝜔𝑟). The total
aerodynamic force acting on the airfoil is denoted by R. The composing vectors for R
is D (Drag) in the direction of the 𝑈𝑟𝑒𝑙 and L (Lift) in the direction perpendicular to the
direction of the 𝑈𝑟𝑒𝑙 [18], [19]. Low air pressure is generated on the suction side of the
airfoil, while high air pressure is developed on the pressure side. That pressure
difference induces the Lift force. Drag force may be understood as the force of the wind
opposing to the airfoil’s motion through it. Lift and Drag may be analyzed into their
1 A blade cross section may be perceived as a very thin airfoil

12
composing vectors in the direction of the airfoil motion (Y) and the direction of the
rotor axis (X) [20]. These components add up to the total aerodynamic force component
in the Y direction (𝑅𝑌) and the X direction (𝑅𝑋) respectively. The cross product of 𝑅𝑌
with the distance from the rotor axis r, gives the local Torque for this very thin airfoil
section of the blade. The sum of the local Torques of every blade section, multiplied by
the number of the rotor blades, gives the total Torque as described earlier. In the same
way, the sum of all local 𝑅𝑋 forces, multiplied by the number of the rotor blades, gives
the total Thrust.
The pressure forces around the airfoil also generate an aerodynamic torque M.
2.1.2 Boundary Layer and Separation
Far from the blade, the inertia effect is larger than the viscous one on the fluid particles.
However, very close to the blade, viscosity plays an important role for the flow. Due to
viscous forces, the air flow right on the blade surface has a zero velocity relative to the
latter (no-slip condition). As we move farther from the surface the velocity increases
till it reaches the so called free-stream velocity value, at a point after which viscous
forces do not influence the flow significantly. The region close to the surface, where
viscosity cannot be neglected, till the point where the flow reaches the free-stream
velocity is called boundary layer (BL). The distance between the surface and the point
where the flow reaches 99% of the free-stream velocity is called boundary layer
thickness (δ) [17].
In order to better understand the flow in a BL, a flat pate case may initially be analyzed.
Before the leading edge, the flow velocity profile is uniform. At the leading edge, right
on the surface, the flow velocity is zero. The no-slip condition leads the boundary layer
to grow, as shown in Figure 2.3 [17].
Figure 2.3. Generic profile of the BL over a flat plate [21]
A flow characteristic is the ratio of the inertia forces that act between its particles to the
viscous ones. This ratio is represented by the Reynolds number (Re) which is defined
as: 𝑅𝑒 =𝜌𝑈𝐿
𝜇 , where: μ is the dynamic viscosity of the fluid which is used to relate
13
the stresses applied on a fluid particle to its linear deformation and L is the characteristic
length that in the case of the flat plate is the horizontal distance from the leading edge.
A low Re indicates that viscous forces play an important role in the flow [22]. A
relatively stable flow, of low Re, which fluid particles follow a streamlined motion
without large fluctuations, is called laminar. Above a critical Re, inertia forces govern
over the viscous ones and the flow moves towards the so called turbulent regime where
its characteristics change to: unstable movement of fluid particles, chaotic fluctuations
in space and time, a wide spectrum of scales of swirling flow structures (eddies), high
diffusivity and dissipation of kinetic energy into heat [23]. In the turbulent regime, there
is mixing of fluid particles of high and low momentum and the flow BL is more
homogeneous than a laminar one. Moreover, a turbulent BL is thicker than a laminar
one, as shown in Figure 2.3. Before becoming turbulent, the flow passes from a
transition stage of a 𝑅𝑒 ≈ 5 ∙ 105 [17].
The transition region is not the same for every surface. When trying to estimate the
flow around another surface such as an airfoil, it may be easier to assume a turbulent
BL right from the stagnation point. The BL may then be estimated by using wall
functions which are models that set the average velocity of a turbulent flow at a certain
distance from the surface. In Chapter 3, where the pre-processing of this thesis work is
described, the specific wall function used for the project’s application is mentioned.
The flow is slower the closer we get to the surface. A favorable pressure gradient would
accelerate the fluid particles in the main flow direction. On the contrary, an adverse
pressure gradient decelerates the fluid in the opposite direction. At a certain point, the
pressure gradient might be strong enough to lead to a separation of flow. That point is
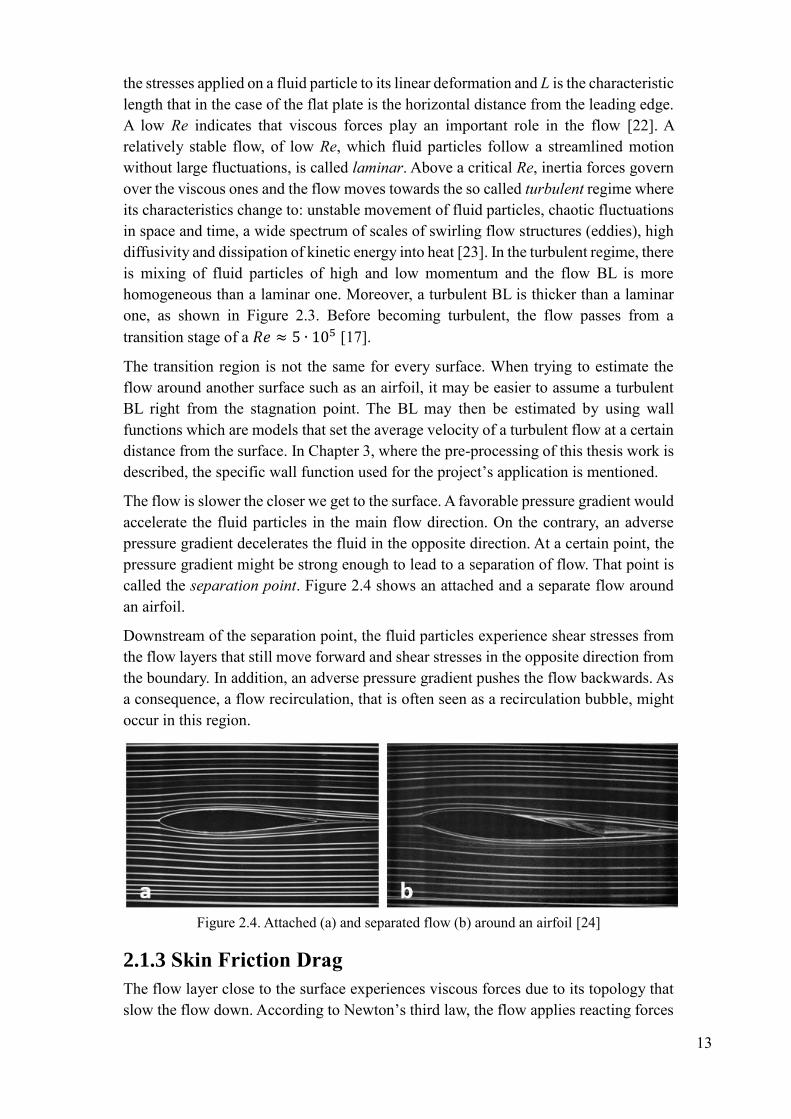
called the separation point. Figure 2.4 shows an attached and a separate flow around
an airfoil.
Downstream of the separation point, the fluid particles experience shear stresses from
the flow layers that still move forward and shear stresses in the opposite direction from
the boundary. In addition, an adverse pressure gradient pushes the flow backwards. As
a consequence, a flow recirculation, that is often seen as a recirculation bubble, might
occur in this region.
Figure 2.4. Attached (a) and separated flow (b) around an airfoil [24]
2.1.3 Skin Friction Drag
The flow layer close to the surface experiences viscous forces due to its topology that
slow the flow down. According to Newton’s third law, the flow applies reacting forces

14
on the surface, opposing an object through it. The sum of these reacting forces is called
skin friction drag.
Due to viscous effects within the fluid, the layer closest to the boundary slows the layer
right above it by imposing shear stresses on it. The slowing-down effect travels to the
upper levels of the flow. In a turbulent regime, it takes longer for this effect to be
diminished as we move farther from the boundary. That indicates that the BL gets
thicker. In other words, increase of the skin friction drag leads to higher turbulence and
thicker turbulent BL.
2.1.4 Pressure Drag
An object exposed in a flow usually experiences a pressure difference between the side
facing the flow and the side where the flow leaves the object. Such pressure difference,
generates a force in the direction of the incoming flow that opposes the motion of the
object through it. This force is called pressure drag. In case of a streamlined object,
where no flow separation occurs, there is no such pressure difference and thus no
pressure drag. On the contrary, when flow separation occurs, the pressure after the
separation point remains approximately equal to the static pressure on the separation
point which is lower than the pressure on the leading edge of the object [17]. Thus,
pressure drag is applied on the object. Similarly, in the case of an airfoil, when flow
separation occurs, the pressure distribution on it is such that pressure drag is generated.
2.1.5 The effect of roughness
More intense roughness is translated to stronger forces between the fluid and the
boundary. That, in turn, means that skin friction drag over the surface is increased.
Moreover, in the turbulent regime, roughness increase is expected to lead to an increase
of the BL thickness. A thicker BL is, in turn, easier to separate from the surface. Thus,
when roughness increases, separation may occur or appear earlier if already occurred.
That, in turn, means that the pressure drag increases. In addition, for an airfoil, if the
separation occurs very close to its maximum thickness point, a large wake will develop
after the separation point. That wake redistributes the flow over the rest of the surface
which may reduce the generated Lift on the airfoil. This condition is known as
aerodynamic stall [25].
To sum up, for an airfoil and a WT rotor blade, roughness increase is expected to lead
to an increase of both skin friction drag and pressure drag as well as to a decrease of
Lift.
2.2 The Reynolds-Averaged Navier-Stokes equations
The above analysis of WT aerodynamics is helpful in order to understand the main
phenomena taking place in the examined WT rotor application qualitatively. However,
this is not enough to make quantitative estimations of a rotor performance. To this end,
the flow should be described mathematically and a system of equations representing its
field should be solved.

15
A fluid flow is governed by three basic principles: (a) mass conservation, (b) the sum
of the forces on a fluid particle equals the rate of change of its momentum (Newton’s
second law) and (c) the sum of the rate of heat addition to a fluid particle and the rate
of work done on it is equal to the rate of change of its energy [26], [27].
The terms fluid element and fluid particle are used in the description of the above
principles. A fluid element may be considered as the smallest control volume (CV) for
which the assumption of the fluid as a continuum is valid. A fluid element is a fixed
volume in space and does not move with the fluid. A fluid particle is a moving CV that
follows the fluid flow and it experiences two rates of changes: one due to the change
of flow field in time and one because it moves to different locations within the flow
field where the conditions are different from each other. [28]
The mass conservation principle is expressed through the continuity equation (eq. 2-
4):
𝜕𝜌
𝜕𝑡+ 𝑑𝑖𝑣(𝜌𝐮) = 0
(2-4)
where 𝑑𝑖𝑣(𝜌𝒖) = 𝜕(𝜌𝑢)
𝜕𝑥+
𝜕(𝜌𝑣)
𝜕𝑦+
𝜕(𝜌𝑤)
𝜕𝑧 and {u, v, w} are the fluid velocity
components in the {x, y, z} Cartesian directions respectively.
Considering a Newtonian2 fluid, the momentum principle, is expressed through the
Navier-Stokes equations {eq. (2-5), (2-6), (2-7)}:
𝜕(𝑢)
𝜕𝑡+ 𝑑𝑖𝑣(𝑢𝐮) = −
1
𝜌
𝜕𝑝
𝜕𝑥+ ν 𝑑𝑖𝑣( 𝑔𝑟𝑎𝑑(𝑢)) + 𝑆
(2-5)
𝜕(𝑣)
𝜕𝑡+ 𝑑𝑖𝑣(𝑣𝐮) = −
1
𝜌
𝜕𝑝
𝜕𝑦+ ν 𝑑𝑖𝑣( 𝑔𝑟𝑎𝑑(𝑣)) + 𝑆
(2-6)
𝜕(𝑤)
𝜕𝑡+ 𝑑𝑖𝑣(𝑤𝐮) = −
1
𝜌
𝜕𝑝
𝜕𝑧+ ν 𝑑𝑖𝑣( 𝑔𝑟𝑎𝑑(𝑤)) + 𝑆
(2-7)
where ν is the kinematic viscosity of the fluid which is defined as the ratio of its
dynamic viscosity to its density (ν =𝜇
𝜌) and S is a denotation for a source term. A
source term expresses a body force3 contribution.
The system of the equations (2-4) – (2-7) may be solved given enough initial conditions
(boundary conditions).
If there is no heat transfer involved in the problem, the energy equation does not need
to be solved, thus, the energy balance principle is out of the scope of this study [26].
The properties of a turbulent flow are decomposed into a mean value and a fluctuating
2 A Newtonian fluid is a fluid for which a fluid particle’s viscous stresses are proportional to its rates of deformation 3 Forces on a fluid particle are categorized in two types: the surface forces {pressure, viscous} and the body forces
{gravity, centrifugal, Coriolis, electromagnetic}

16
component superimposed on it. The mean value is denoted with a capital letter while
the fluctuating component with a lower case letter stressed. For example, the flow
velocity, at a certain point, is written as 𝑢(𝑡) = 𝑈(𝑡) + 𝑢′(𝑡). This type of expressing
a property is called the Reynolds decomposition.
Considering the Reynolds decomposition for an incompressible turbulent flow (such as
the one of the examined flow around a WT rotor), the continuity equation is
transformed to the continuity equation for the mean flow (eq. 2-8):
𝑑𝑖𝑣𝐔 = 0
(2-8)
With the same considerations, the Navier-Stokes equations are transformed to the so
called Reynolds-Averaged Navier-Stokes (RANS) equations {eq. (2-9), (2-10), (2-
11)}:
𝜕(𝑈)
𝜕𝑡+ 𝑑𝑖𝑣(𝑈𝐔) = −
1
𝜌
𝜕𝑃
𝜕𝑥+ ν 𝑑𝑖𝑣( 𝑔𝑟𝑎𝑑(𝑈))
+1
𝜌[𝜕(−𝜌𝑢′2̅̅ ̅̅ )
𝜕𝑥+
𝜕(−𝜌𝑢′𝑣′̅̅ ̅̅ ̅̅ )
𝜕𝑦+
𝜕(−𝜌𝑢′𝑤′̅̅ ̅̅ ̅̅ )
𝜕𝑧]
(2-9)
𝜕(𝑉)
𝜕𝑡+ 𝑑𝑖𝑣(𝑉𝐔) = −
1
𝜌
𝜕𝑃
𝜕𝑦+ ν 𝑑𝑖𝑣( 𝑔𝑟𝑎𝑑(𝑉))
+1
𝜌[𝜕(−𝜌𝑢′𝑣′̅̅ ̅̅ ̅̅ )
𝜕𝑥+
𝜕(−𝜌𝑣′2̅̅ ̅̅ )
𝜕𝑦+
𝜕(−𝜌𝑣′𝑤′̅̅ ̅̅ ̅̅ )
𝜕𝑧]
(2-10)
𝜕(𝑊)
𝜕𝑡+ 𝑑𝑖𝑣(𝑊𝐔) = −
1
𝜌
𝜕𝑃
𝜕𝑧+ ν 𝑑𝑖𝑣( 𝑔𝑟𝑎𝑑(𝑊))
+1
𝜌[𝜕(−𝜌𝑢′𝑤′̅̅ ̅̅ ̅̅ )
𝜕𝑥+
𝜕(−𝜌𝑣′𝑤′̅̅ ̅̅ ̅̅ )
𝜕𝑦+
𝜕(−𝜌𝑤′2̅̅ ̅̅ ̅)
𝜕𝑧]
(2-11)
Compared to the laminar Navier-Stokes equations, the RANS equations include six additional
stresses. Three normal stresses: 𝜏𝑥𝑥 = −𝜌𝑢′2̅̅ ̅̅ , 𝜏𝑦𝑦 = −𝜌𝑣′2̅̅ ̅̅ , 𝜏𝑧𝑧 = −𝜌𝑤′2̅̅ ̅̅̅ and three shear
stresses: 𝜏𝑥𝑦 = 𝜏𝑦𝑥 = −𝜌𝑢′𝑣′̅̅ ̅̅ ̅, 𝜏𝑥𝑧 = 𝜏𝑧𝑥 = −𝜌𝑢′𝑤′̅̅ ̅̅ ̅̅ , 𝜏𝑦𝑧 = 𝜏𝑧𝑦 = −𝜌𝑣′𝑤′̅̅ ̅̅ ̅̅ . These
additional turbulent stresses are called Reynolds stresses. The Reynolds stresses are
related to the momentum exchange among the fluid particles due to convective
transport by the eddies, which causes the faster moving fluid layers to be decelerated
and the slower moving layers to be accelerated [26].
The system of equations (2-8) – (2-11) is not closed even if boundary conditions (BC)
are provided. In order to close the system, there have been several turbulence models
developed. One them is the two-equations-based k – ω SST (Shear Stress Transport)
model that relates the turbulent kinetic energy (k) with its specific dissipation rate (ω).
17
The model is appropriate for external aerodynamic applications and it has been, thus,
selected as the proper model to be used for this study. An extra reason for selecting the
k – ω SST turbulence model is that, according to Sagol et al. [14], it seems to be the
most accurate model when it comes to capturing the effect of WT blades’ surface
roughness on the flow. Details on the included equations of the model may be found in
(Versteeg and Malalasekera) [26].
The RANS equations focus on the mean flow and the effect of turbulence to its
properties. It should be noted that RANS equations are able to resolve large eddies
(Integral scale) but model the effect of smaller eddies to the flow field rather than
compute their exact formation. Different approaches may resolve the eddies and thus
the whole flow with higher accuracy. The Large Eddy Simulations (LES) and the Direct
Numerical Simulations (DNS) are used for that purpose. Large Eddy Simulations are
able to compute the formation of eddies up to a certain filter scale within a turbulent
flow but model the effect of the smaller ones like in the RANS method. Direct
Numerical Simulations resolve the formation of all eddies [26], [29].
Although the LES and DNS approach lead to higher accuracy, the computational cost
is high as well. For the present study, where it is not necessary to resolve the turbulent
fluctuations in detail and the interest is about the time-averaged properties of the flow,
the RANS equations constitute a method that is expected to give satisfactory results.
2.3 Using Computational Fluid Dynamics
In the previous section, the need for a quantitative approach of the flow description was
stressed. That, in turn, led to the development of a system of equations describing the
flow mathematically. However, in order to get an estimation of the flow properties in
space and time, the above system of equations needs to be solved. To this end, the
Computational Fluid Dynamics (CFD) method is used. CFD is the process of solving
the partial differential equations describing a flow in order to obtain a description of
the complete flow field of interest in space and time [27].
A CFD problem is defined within certain geometrical boundaries. A set of closed
boundaries defines the region in which the flow properties are going to be computed.
This region is called computational domain. A computational domain is split to a
number of control volumes (CV) cells that, in turn, define the so called computational
mesh (or simply mesh). The process of splitting the computational domain in several
cells is called meshing. In order to simulate a flow within a certain domain, the fluid
properties in each and every cell should be computed.
Since certain similarities may be observed among the equations describing the flow, a
single form of all of them may be introduced:
𝜕(𝜌𝛷)
𝜕𝑡+ 𝑑𝑖𝑣(𝜌𝛷𝒖) = 𝑑𝑖𝑣(𝛤𝑔𝑟𝑎𝑑𝛷) + 𝑆𝛷
(2-12)
where Φ is a general variable that can be replaced with each flow variable, Γ is the
diffusion coefficient and 𝑆𝛷 the source term for the property Φ. Equation (2-12) is

18
called a transport equation.
The 𝑑𝑖𝑣(𝜌𝛷𝒖) part is called convective term, while 𝑑𝑖𝑣(𝛤𝑔𝑟𝑎𝑑𝛷) is called diffusive
term.
Integrating equation (2-12) over a three dimensional CV leads to the expression below
(eq. 2-13):
∫𝜕(𝜌𝛷)
𝜕𝑡
𝐶𝑉
𝑑𝑉 + ∫ 𝑑𝑖𝑣(𝜌𝛷𝒖)𝑑𝑉
𝐶𝑉
= ∫ 𝑑𝑖𝑣(𝛤𝑔𝑟𝑎𝑑𝛷)𝑑𝑉
𝐶𝑉
+ ∫ 𝑆𝛷
𝐶𝑉
𝑑𝑉
(2-13)
Solving the transport equation over the cells of an entire domain, provides the way that
the fluid properties change in space and time. This approach is called the finite volume
method.
The more control volumes a domain is split to, the more accurate flow solution may be
achieved. Depending on the resolution, a computational mesh may be characterized
either as fine or coarse.
A mesh should not, necessarily, be of the same resolution in every region of a domain.
For instance, in the case of simulating the air flow around a WT rotor, a higher mesh
resolution is needed close to the blade where the flow changes are more intense, while
a lower mesh resolution may be enough far from the blade. Last but not least, in order
for a stable CFD solution to be achieved, the mesh should obey several quality
requirements such as cells’ skewness close to zero, cells’ aspect ratio close to 1 and
smoothness in the change of the cells’ size between neighboring mesh zones [26].
A CFD solution for a complex problem, such as studying the flow around a WT rotor,
would not be possible without the use of modern computers or clusters of them that can
handle big computational costs.
2.4 Related studies done
2.4.1 The NREL 5MW wind turbine
The United States National Renewable Energy Laboratory (NREL) has released a study
on a 5MW rated power WT, the geometry of which has been defined by the NREL
itself. An aerodynamic analysis, based on the NREL in-built tool FAST, has been
carried out as a part of the same study [30]. The NREL 5MW WT geometry as well as
the results from its aerodynamic analysis have been a validation reference for various
works aiming to study the flow around wind turbines.
Chow and van Dam [31] have developed the OVERFLOW2 numerical simulation
model to solve RANS equations with a k – ω SST turbulence model regarding the
NREL 5MW rotor. One of their goals has been to show that flow separation over the
inboard part of a WT leads to significant power loss and investigate possible solutions
to recover part of it. However, for this thesis, the most important outcome of their study
is related to the near wake region mesh resolution. What they have shown is that low
mesh resolution for the near wake region leads to over-prediction of the total rotor

19
Torque and Thrust.
Dose et al. [32] have carried out an OpenFOAM based CFD study on the effect of blade
deflection on the aerodynamic performance of WT rotors. They have also developed a
k – ω SST turbulent model around the NREL 5MW rotor. Their study shows that there
is an increase of around 1% and around 4% for Power and Thrust respectively
when blade deflection is taken into account compared to cases where rigid blades
are examined. That power increase may be explained by an increase in the blade’s
angle of attack activated by a torsion deformation on the region closer to its tip. It
should be noted, though, that in the present thesis blade deflections have not been taken
into account.
2.4.2 Studies on roughness
Sagol et al. [14], have reviewed the effect of blades’ roughness on the flow field and
the power generation performance of a WT as well as the ability of various numerical
models to capture it. Various types of roughness elements4 have been investigated as
well as various intensities and locations of it. Their study outcome show that roughness
causes early transition from laminar to turbulent flow around the WT blades. It also
shows that the extent of the transition flow is longer and the turbulence intensity close
to the blades is increased. Furthermore, it is concluded that a WT tends to
underperform as its surface roughness elements’ size and density increases. In
addition, the blade’s leading edge region seems to be most sensitive to roughness, while
the latter shows little influence on the flow for the region close to the trailing edge.
Finally, the k – ω SST turbulence model has been selected as the most accurate
one, when it comes to capturing the effect of roughness on the flow around a wind
turbine.
Van Rooij and Timmer [33] have examined the effect of roughness on airfoils of
different thickness and structure, trying to relate its effect on their performance. The
RFOIL code has been used to represent the effect of blade rotation to the flow. As it is
concluded, “results from this code indicate that rotational effects dramatically
reduce roughness sensitivity effects at inboard5 locations of a blade”. As an extra
conclusion, it is stated that vortex generators on an airfoil reduce its sensitivity to
roughness, leading to better overall airfoil aerodynamic performance.
Huang et al. [34] have evaluated the roughness sensitivity indicators for different blade
airfoil sections in the spanwise direction for a pitch-regulated WT. The study focuses
on the two dimensional aerodynamics of an airfoil. It is pointed out that the Drag force
has little effect on the middle and inboard sections of the blade but significant one on
the outboard part where most of the wind energy is extracted. It is also concluded that
the generated Lift force decreases when the surface roughness increases, especially
when that increase is in the leading edge region.
Ren and Ou [35] have investigated the effect of roughness on the flow over the
NACA63-430 airfoil, which is widely used in the mid-sections of WT blades. Their
4 By the term roughness elements, types of roughness like dirt, ice, etc. are meant 5 Inboard indicates the region closer to the root of a blade while outboard indicates the region close to the blade tip

20
work has been based on RANS with a k – ω SST model. Their model has been first
validated against experimental data for a smooth case and a good agreement has been
observed. Different roughness heights have been tried on the tested airfoil. The results
indicate that airfoil aerodynamic performance is more sensitive to roughness
heights lower than 0.3mm and less for greater than 0.3mm ones. It is also
concluded that roughness has greater effect in the front 50% chord span of an airfoil
rather than in the back 50% of it.

21
3. Preprocessing
An OpenFOAM-software based CFD model has been developed for the scope of this
thesis. It has been attempted that solutions of low computational cost are achieved. The
goal is to create a model that is able to capture the effect of roughness on a WT three-
blade rotor aerodynamic performance.
The acceptable accuracy has been set as the one enough to show a certain trend for the
above. To this end, RANS type calculations have been performed on a computational
domain of moderate mesh refinement. The k – ω SST turbulence model has been
applied for reasons explained in section 2.4.3. The study focus has been on the total
Torque and total Thrust forces of the examined WT rotor. The total Torque and Thrust
are calculated as the sum of pressure and viscous forces for each blade point in the
direction of motion (Cartesian Y-axis in this model) and the direction of the undisturbed
wind (Cartesian Z-axis in this model) respectively.
Since the study focus has been on the region around the blade, less importance has been
given to the domain regions far from it. As it will be shown in Chapter 4, a mesh
refinement extending farther from the blade may improve the wake predictions which,
in turn, may affect the forces around the rotor. However, since this work may be
considered as a feasibility study for the goals stated in the first paragraph and since a
light solution model is to be developed in order to see whether or not a relevant trend
can be captured, a lower mesh resolution has been applied.
3.1 Mesh
In order to reduce the computational cost, the rotor has not entirely been considered in
the computational domain. Taking advantage of the fact that that – without the presence
of any other WT component – there is a 120° periodicity in the rotor geometry and the
flow around it, just one third of the rotor has been included in the model preprocessing
stage. The effect on the flow around a single blade from the other two is computed by
considering the so called cyclic boundary conditions (BC) as it is explained in the
following section. A rough illustration of how the computational domain looks like is
offered in Figure 3.1 below.
It should be noted that there is no actual rotor boundary but this imaginary patch is
used to show the interface between two regions: the rotating and the stationary one (see
section 3.3).
In order to avoid any computation disruption or influence of the outer boundary
(symmetrySide) to the blade, a distance of 9 ∙ (𝑏𝑙𝑎𝑑𝑒 𝑟𝑎𝑑𝑖𝑢𝑠) is kept between the two
patches. For the same reason, a distance of 2 ∙ (𝑏𝑙𝑎𝑑𝑒 𝑟𝑎𝑑𝑖𝑢𝑠) and 5 ∙ (𝑏𝑙𝑎𝑑𝑒 𝑟𝑎𝑑𝑖𝑢𝑠)
from the blade is kept for the inlet and the outlet patches respectively.

22
Figure 3.1. Domain’s boundaries
An unstructured mesh of ~13M cells has been used. Since the region around the blade
is the main focus of the study as explained above, the highest level of refinement has
been around the blade while the mesh gets coarser towards the surrounding boundaries.
Figure 3.2 shows how the mesh gets finer as we move closer to the blade, on a plane
normal to the blade spanwise direction at a height of 45m (r/R=0.71).
Figure 3.2. Mesh refinement close to the blade, r/R=0.71
In order for the aerodynamic forces to be properly calculated and the effect of
roughness on them to be better captured, the boundary layers around the blade surface
should be better estimated. To this end, an extra type of refinement – called layering –
has been applied around the blade boundary. This refinement is shown in Figure 3.3
and Figure 3.4 which actually provide a closer look of the Figure 3.2 above.

23
Figure 3.3. Layering around the blade
Figure 3.4. A zoom in the layers around the blade
The computational mesh has been generated using the OpenFOAM in-built meshing
snappyHexMesh utility. It is necessary that surface meshes are provided to
snappyHexMesh for every boundary patch included in the computational domain. The
corresponding surfaces have been designed and meshed by using the SALOME
software. The most challenging part has been the surface meshing process of the blade.
For this project, blade is considered as the WT blade itself along with one third of the
rotating component – called spinner – where actually the blades stand. This is
illustrated in Figure 3.5 below. It should be noted that the blade’s geometry is as
defined by NREL in the relevant report [30], while the spinner is not based on any
official document but rather designed to resemble an actual spinner. Since the main
wind energy extraction is expected to take place towards the outboard section of the
blade, the spinner should not play a key role in the examined rotor aerodynamics. The
rotor diameter is 126 m. Its performance has been tested for four incoming velocities
{8, 9, 10 and 11.4 m/s} with respective tip-speed ratio (TSR) of {7.54, 7.54, 7.53 and
6.93}. For this velocity range, the same pitch angle has been taken into consideration
as indicated in the NREL report [30]. The comparisons regarding roughness have been
performed for an incoming velocity of 10m/s.

24
Figure 3.5. Blade along with spinner
3.2 Boundary conditions and numerical schemes
The computational domain includes six boundaries, as in Figure 3.1: {blade, inlet,
outlet, symmetryUp, symmetryDown, symmetrySide}. It is reminded that there is no
rotor boundary included in the computational domain, but this patch is used to indicate
the interface between two different regions within the same domain.
The inlet and outlet boundaries are self-explained. Regarding the symmetryUp and
symmetryDown boundaries, those are considered to be neighboring with each other. In
other words, the flux going out of the symmetryDown boundary is seen as an incoming
flux for the symmetryUp one and vice versa. The BC condition best describing such a
neighboring relationship is the cyclic one.
The symmetrySide boundary resembles the region very far from the rotor, where wind
velocity and pressure may be considered same as the ones of the inlet. This boundary
may be physically considered as the sky in this model.
In the followed approach (see section 3.4), instead of a rotating blade, a stationary blade
with a rotating flow around it, is considered. That explains why a zero velocity BC has
been assigned for the blade.
The BC used for the velocity and pressure fields for every patch are summarized in
Table 3.1 below.

25
Table 3.1. Velocity and pressure conditions assigned on boundaries
boundary velocity pressure6
inlet 10 m/s zeroGradient
outlet 10 m/s 0 [m2/s2]
blade 0 m/s zeroGradient
symmetrySide 10 m/s zeroGradient
symmetryUp &
symmetryDown cyclic cyclic
The OpenFOAM simpleFoam utility for incompressible flows has been used for
solving this problem. The applied finite volume numerical schemes are defined in the
system/fvScheme file as in the Appendix A. More about the finite volume schemes
theory as well as the available OpenFOAM choices on them may be found in Versteeg
and Malalasekera [26] and the OpenFoam user guide [36] respectively.
3.3 Wall function
As mentioned in section 2.1.2, the BL may be estimated by using wall functions which
are models that set the average velocity of a turbulent flow at a certain distance from
the surface. The specific wall function used for the project’s application is given by eq.
3-1 below. It is reminded that by using wall functions, it is assumed that the BL is by
default in the turbulent regime.
𝑢𝑃𝐶𝜇
14⁄
𝑘1
2⁄
𝜏𝑤
𝜌
=1
𝜅ln (𝐸
𝜌
𝜇𝐶𝜇
14⁄
𝑘1
2⁄ 𝑦𝑃) −1
𝜅ln (1 + 𝐶𝑠
𝜌
𝜇𝐶𝜇
14⁄
𝑘1
2⁄ 𝐾𝑠)
(3-1)
𝒖𝑷: is the mean velocity of the fluid at point P
𝒚𝑷: is the distance from the point P to the wall
𝑪𝝁: is a constant related to the turbulence model and is equal to 0.09
𝒌: ss the turbulent kinetic energy
𝝉𝒘: is the wall shear stress
𝝆: is the fluid density
𝜿: is the von Karman constant, equal to 0.4187
𝑬: is an empirical constant, equal to 9.793
𝝁: is the dynamic viscosity of the fluid
𝑪𝒔: is the roughness constant that indicates the roughness distribution along the
surface. A value of 0.5 indicates an even distribution
𝑲𝒔: is the actual roughness height (e.g. for a sand grain type roughness, 𝐾𝑠 is the
actual height of a sand grain) and it is the parameter for which different values
have been tried out in this project.
6 For an incompressible problem, such as the examined one, OpenFOAM solves for the normalized-by-density static
pressure 𝑝∗ = 𝑝/𝜌.

26
3.4 The Multiple Reference Frame approach
As mentioned in the introduction, a steady-state approach has been applied on the
developed incompressible flow model. For steady-state incompressible solutions,
where rotation of boundaries and torque forces are investigated, OpenFOAM offers
certain approaches. For computational cost reasons, the Multi Reference Frame (MRF)
one has been selected for this case.
In the MRF approach and for the specific problem, two regions have been defined in
the computational domain. A rotating and a stationary one, as shown in Figure 3.6. The
red-shaded one is the rotating region and the grey-shaded one is the stationary region.
As stated earlier, in the first one, a rotating flow around the blade is considered rather
than a rotating blade. The axis of rotation is the axis of the whole rotor geometry
symmetry. In other words, a tangential velocity is imposed on the cells centers within
the rotating region. The cells in the stationary region may see the effect of the rotation
of the cells that belong to the rotating region. However, there is no rotational velocity
imposed on the cell centers of the stationary region.
The above is demonstrated in Figure 3.7. In the rotating region, the Coriolis force is
added as a source term in the governing equations. Moreover, for the cells belonging
to it, the tangential component is taken into account when computing for the velocity
which is taken as: 𝑈𝑟𝑒𝑙 = 𝑈𝑎𝑏𝑠 + 𝜔 ∗ 𝑟 .
Figure 3.6. Rotational (red) and stationary (grey) regions

27
Figure 3.7. Air modeled to rotate around the blade in the rotating region

28
4. Results and Discussion
The main focus of this chapter is to show how close the developed model stands in
respect to the initial expectations. It is, thus, important to take into account the lessons
learned from previous studies, as in Chapter 2, while judging on the specific model’s
outcome.
4.1 Smooth surface results
4.1.1 Relative velocity around the blade
Since the aerodynamic forces around the blades are the main scope of this thesis, the
relative velocity (Urel) distribution around it should also be examined. Such an
examination reveals the regions where flow separation is most expected to occur. This
can be done by observing the Urel around various blade cross sections along the blade.
Figure 4.1 – Figure 4.4 show the Urel for four selected representative cross sections: at
r/R=0.08, r/R=0.16, r/R=0.48 and r/R=0.71 respectively. Figure 4.5 is a streamlined
representation of Urel at r/R=0.71. The Cartesian X, Y and Z axes are assigned to the
undisturbed wind direction, the direction of the blade motion and the blade spanwise
direction respectively. With dark blue, Urel values equal to the minimum value stated
on the figures are represented, while with dark red, values equal to the maximum one
are represented.
From the figures, it may be observed that, in the blade inboard sections, early flow
separation occurs for incoming wind of 10m/s. It is reminded that the rotor diameter is
126m and the tip-speed ratio for that case is 7.53. The separation point is further
downstream, along the chord span, for the middle and outboard sections.
Figure 4.1. relative velocity distribution, r/R=0.08

29
Figure 4.2. relative velocity distribution, r/R=0.16
Figure 4.3. Relative velocity distribution, r/R=0.48
Figure 4.4. relative velocity distribution, r/R=0.71

30
Figure 4.5. Streamlined representation of the relative velocity field, r/R=0.71
4.1.2 The wake behind the rotor
Although the main focus is around the blade, the fact that the rotor’s velocity wake may
affect the blade region should not be neglected either. Due to the vortices developed in
the rotor’s wake, the latter may induce backward wind velocity as well. That would
slow down the incoming wind velocity seen by the rotor. It is, thus, important to
sufficiently resolve the wake up to a certain distance downstream the rotor.
In order for that to be supported, extra mesh refinement, extending in the region of
interest, is necessary. Figures 4.6 – 4.8 show the wake behind the blade in the examined
domain, as seen on a plane on the blade translation axis, for three different mesh
refinement extensions around the blade. In the first case (Figure 4.6), the mesh is
moderately refined up to a distance of 0.024R away from the blade in all directions,
leading to a domain of ~13M cells (case 1). In the second case (Figure 4.7), the mesh
is moderately refined within a cylinder of r = 1.59R extending from -0.095R upstream
the rotor till R downstream the rotor, on the axis of rotation, leading to a domain of
~24M cells (case 2). In the third case (Figure 4.8), the mesh is moderately refined
within a similar cylinder like the one of case two, with the same radius, but this time
extending from -R upstream the rotor till 2R downstream the rotor, on the axis of
rotation, leading to ~33M cells (case 3).
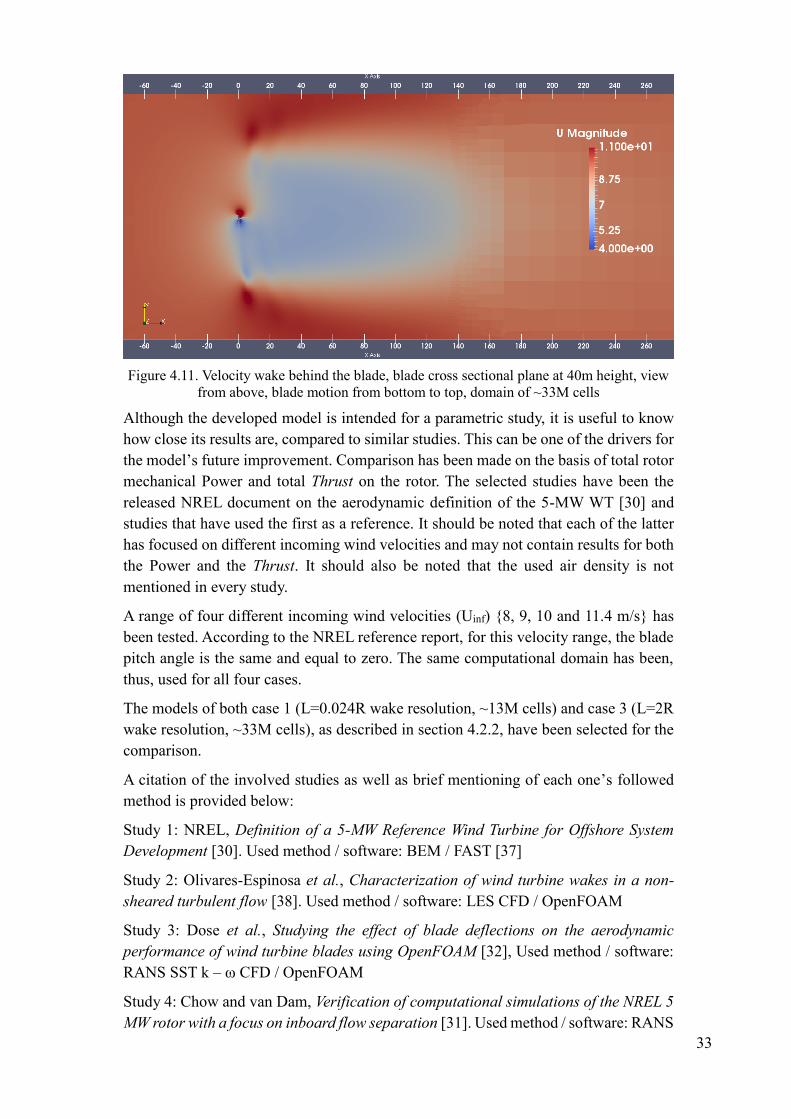
In Figures 4.9 – 4.11 the wakes of the same cases are illustrated on a blade cross
sectional plane at r/R=0.63. The view is as if an observer looks down the blade. The
blade motion direction is from the bottom to the top of the figures. The dark red values
refer to the region close to the leading edge, on the suction side. It should be stressed
that the figures show the field for U, not for Urel.
The results suggest that, for case 2 (~24M cells), there is a decrease of around -4% and
-2% for the total Torque and total Thrust respectively, compared to case 1 (~13M cells).
For case 3 (~33M cells), the decrease in the total Torque and Thrust is around -9.6%
and -3.9% respectively, compared to case 1 (~13Mcells). There is a clear over-
prediction of both Torque and Thrust as the wake region moves towards lower

31
resolution. This is in agreement with the study results of Chow and van Dam [31], as
mentioned in section 2.4.1.
On the other hand, a higher mesh resolution allows for better capturing the physics of
the problem. The wake can be better resolved when the refinement extends in a larger
region. That, however, increases the computational cost dramatically.
Since the purpose of developing this model is to check if a certain trend in the
aerodynamic performance due to roughness can be captured, a model of lower
refinement may be used. Consequently, the one that is computationally cheaper (first
case with low resolved wake) has been selected to carry out this study.
Figure 4.6. Velocity wake behind the blade, plane in the direction normal to the blade motion,
domain of ~13M cells
Figure 4.7. Velocity wake behind the blade, plane in the direction normal to the blade motion,
domain of ~24M cells

32
Figure 4.8.Velocity wake behind the blade, plane in the direction normal to the blade motion,
domain of ~33M cells
Figure 4.9.Velocity wake behind the blade, blade cross sectional plane at 40m height, view
from above, blade motion from bottom to top, domain of ~13M cells
Figure 4.10. Velocity wake behind the blade, blade cross sectional plane at 40m height, view
from above, blade motion from bottom to top, domain of ~24M cells
33
Figure 4.11. Velocity wake behind the blade, blade cross sectional plane at 40m height, view
from above, blade motion from bottom to top, domain of ~33M cells
Although the developed model is intended for a parametric study, it is useful to know
how close its results are, compared to similar studies. This can be one of the drivers for
the model’s future improvement. Comparison has been made on the basis of total rotor
mechanical Power and total Thrust on the rotor. The selected studies have been the
released NREL document on the aerodynamic definition of the 5-MW WT [30] and
studies that have used the first as a reference. It should be noted that each of the latter
has focused on different incoming wind velocities and may not contain results for both
the Power and the Thrust. It should also be noted that the used air density is not
mentioned in every study.
A range of four different incoming wind velocities (Uinf) {8, 9, 10 and 11.4 m/s} has
been tested. According to the NREL reference report, for this velocity range, the blade
pitch angle is the same and equal to zero. The same computational domain has been,
thus, used for all four cases.
The models of both case 1 (L=0.024R wake resolution, ~13M cells) and case 3 (L=2R
wake resolution, ~33M cells), as described in section 4.2.2, have been selected for the
comparison.
A citation of the involved studies as well as brief mentioning of each one’s followed
method is provided below:
Study 1: NREL, Definition of a 5-MW Reference Wind Turbine for Offshore System
Development [30]. Used method / software: BEM / FAST [37]
Study 2: Olivares-Espinosa et al., Characterization of wind turbine wakes in a non-
sheared turbulent flow [38]. Used method / software: LES CFD / OpenFOAM
Study 3: Dose et al., Studying the effect of blade deflections on the aerodynamic
performance of wind turbine blades using OpenFOAM [32], Used method / software:
RANS SST k – ω CFD / OpenFOAM
Study 4: Chow and van Dam, Verification of computational simulations of the NREL 5
MW rotor with a focus on inboard flow separation [31]. Used method / software: RANS

34
SST k – ω CFD / OVERFLOW2
Study 5: Zhao et al., Computational Aerodynamic Analysis of Offshore Upwind and
Downwind Turbines [39], Used method / software: RANS / U2NCLE [39]
Figure 4.12 and Figure 4.13 show where the present study stands in terms of predicted
rotor total Power and total Thrust, compared to the studies mentioned above.
The comparison suggests that both of the examined cases of the developed model have
the lowest Power prediction for all incoming wind velocities. The Thrust estimation
seems to be in closer agreement with other studies. Further investigation is needed to
understand the reasons of such discrepancies.
Although a low wake resolution model is not able to capture the wake physics correctly,
it can still be used for a comparative study on the blade region.
Figure 4.12.Rotor power predictions for different incoming wind velocities
1500
2000
2500
3000
3500
4000
4500
5000
5500
6000
7 7 . 5 8 8 . 5 9 9 . 5 1 0 1 0 . 5 1 1 1 1 . 5 1 2
Ro
tor
Po
we
r [k
W]
Incoming wind velocity [m/s]
Power vs U inf
present study 13M cells present study 33M cells NREL
Olivares-Espinosa et al. Dose et al. Chow and van Dam
Zhao et al.

35
Figure 4.13. Rotor Thrust for different incoming wind velocities
4.2 The effect of roughness
In this study, since roughness has been applied through wall functions, its intensity has
been considered as uniformly distributed on the blade surface. However, reality might
be different and roughness would rather be more intense in certain regions such as the
leading edge.
Four different roughness height values have been selected to be compared with a case
of smooth blade surface: 30μm, 100μm, 0.5mm and 1mm. They all refer to the exact
same case set up, in which roughness height is the only parameter that changes. The
driver for the selection of the above values has been the possible reasons leading to
blade degrading (erosion, mosquitos, dust, icing). Since this is a feasibility study, a
rough estimation has been performed to assign the specific roughness heights to the
respective roughness sources.
An incoming wind velocity of 10m/s has been applied for the comparisons.
The light low-wake-resolution version of the developed model (case 1, 13M cells) has
350
400
450
500
550
600
650
700
750
800
850
900
7 8 9 1 0 1 1 1 2
Ro
tor
Thru
st [
kN]
Incoming wind velocity [m/s]
Thrust vs U inf
present study 13M cells present study 33M cells NREL
Olivares-Espinosa et al. Dose et al. Chow and van Dam

36
been used. In the following figures, a comparison between a smooth blade case and a
case of 0.5mm roughness height has been selected as a representative one for
demonstrating the effect of roughness on the aerodynamic performance. Figure 4.14
provides a close look of the Urel distribution around the blade, at r/R=0.71. The effect
of roughness on the flow closer to the trailing edge may be detected. This becomes
clearer at Figure 4.15 which is a streamlined representation of Figure 4.14. Here it
becomes more obvious that roughness leads to earlier flow separation, as actually
expected. The same trend has been detected throughout the whole blade span but
r/R=0.71 has been selected for demonstration, since at the middle and outboard regions
is where the largest wind energy extraction is expected to take place.
The turbulence increase generated by the addition of roughness on the blade is
demonstrated in Appendix B, where plots of the BL development and turbulent kinetic
energy in it are presented for different x/c points of the blade suction side, at r/R=0.71.
Figure 4.14. Relative velocity around a smooth and a rough blade, at r/R=0.71, TSR=7.53,
rotor diameter=126m
Figure 4.15. Streamlined relative velocity around a smooth and a rough blade, at r/R=0.71,
TSR=7.53, rotor diameter=126m

37
The overall results indicate a that, in respect to the smooth surface case, there is a
Torque decrease of around -1%, -5%, -18% and -25% for the 30μm, 100μm, 0.5mm
and 1mm roughness height cases respectively. However, there is a decreasing trend for
the Thrust as well, with the respective figures being -0.5%, -2%, -8% and -11% for the
four cases.
Figure 4.16 illustrates the estimated Torque for each of the examined cases, while
Figure 4.17 shows the estimated Thrust for the same cases. By looking at the relative
changes, what can be drawn as a conclusion is that, both Torque and Thrust wise, the
rotor is more sensitive to small rather than large roughness heights. This follows the
trend indicated for an airfoil level by Ren and Ou [35], as mentioned in section 2.4.2.
Figure 4.16. Roughness effect on Torque
Figure 4.17. Roughness effect on Thrust
The recorded Torque loss for the rough cases may be explained by the fact that the
separation point moves towards the blade leading edge as the roughness height
increases and there is, thus, lower Lift generation.
2000
2100
2200
2300
2400
2500
2600
2700
2800
2900
3000
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
Torque
[kN
m]
roughness height [mm]
Torque vs roughness height
smooth
1mm
0.5 mm
100μm
30μm
560
570
580
590
600
610
620
630
640
650
660
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
Thrust
[kN
]
roughness height [mm]
Thrust vs roughness height
smooth
1mm
0.5mm
100μm
30μm

38
Regarding the Thrust decrease, this may be explained by the total decrease of its Lift
component due earlier flow separation.

39
5. Conclusion and Outlook
Estimating the aerodynamic performance of WT rotors may be of great importance for
wind farm operators in order to carry out a more efficient fleet management. Various
parameters may be taken into account when making such estimations. As such, surface
roughness seems to be a well-known problem for a rotor’s performance. It could be,
thus, useful for an operator to have a cost-effective tool for monitoring the effect of
surface roughness intensity on the aerodynamic performance of WT rotors. For the
development of such a tool, Computational Fluid Dynamics may be used.
This thesis deals with the development of a cost effective CFD model that may be used
as a tool for parametric studies on a WT rotor. The investigated parameter, in this work,
is blade surface roughness. The OpenFOAM open-source software has been used to
develop the desired model. A rigid body steady state RANS, k – ω SST CFD case has
been set up. The NREL 5-MW rotor geometry has been examined for this case. The
effect of four different surface roughness intensities – expressed through four
roughness height values {30 μm, 100 μm, 0.5 mm, 1 mm} respectively – on its
aerodynamic performance have been investigated, for an incoming wind velocity of
10m/s. The referred roughness height values have been applied on the whole rotor
surface. A 120° wedge type computational domain of an unstructured mesh has been
developed for the case.
The main focus of the solution has been the change that roughness induces in a
given/estimated rotor performance rather than the accuracy of the estimated
performance itself.
5.1 Thesis outcome
The main outcome of the model indicates that a roughness height increase leads to
earlier flow separation over the blade suction side. That leads to a decrease for the
Thrust force on the rotor and the extracted Toque by the latter. Moreover, it is concluded
that the rotor aerodynamic performance is more sensitive to low roughness heights
rather than to higher ones.
More specifically, in respect to a smooth surface case, there is a Torque decrease of 1%,
5%, 18% and 25% for the 30μm, 100μm, 0.5mm and 1mm roughness height cases
respectively. There is a decreasing trend for the Thrust as well, with the respective
figures being 0.5%, 2%, 8% and 11% for the four cases.
40
5.2 Future work
From the figures mentioned above, it may be concluded that the roughness effect on a
WT rotor’s performance can be captured with the present model and it may motivate
further parametric studies.
To this end, a more accurate model should be developed.
A mesh improvement could be the starting point. More specifically, a higher wake
region resolution, a better layering and a longer computational domain may be
considered.
Different incoming wind velocities as well as non-uniform roughness distribution could
also be tried out.
Finally, an investigation of vortex generators or other means that could possibly lead to
a Torque recovery are yet to be tried as well.
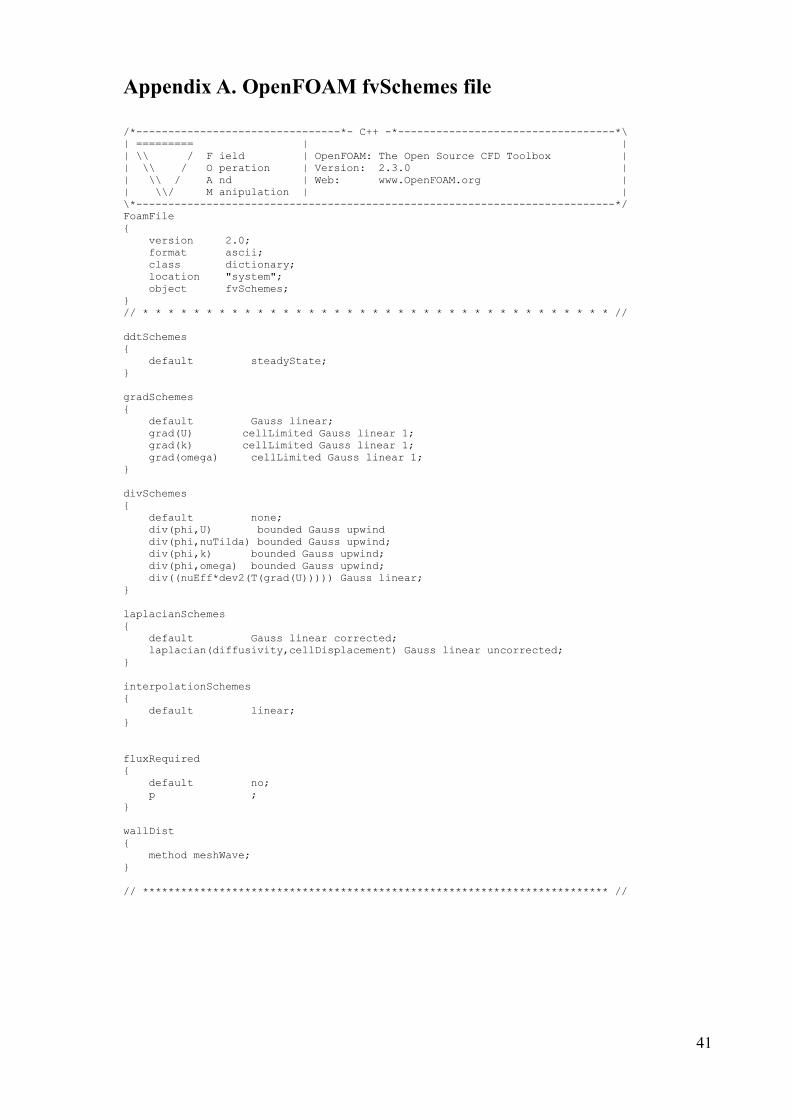
41
Appendix A. OpenFOAM fvSchemes file
/*--------------------------------*- C++ -*----------------------------------*\
| ========= | |
| \\ / F ield | OpenFOAM: The Open Source CFD Toolbox |
| \\ / O peration | Version: 2.3.0 |
| \\ / A nd | Web: www.OpenFOAM.org |
| \\/ M anipulation | |
\*---------------------------------------------------------------------------*/
FoamFile
{
version 2.0;
format ascii;
class dictionary;
location "system";
object fvSchemes;
}
// * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * //
ddtSchemes
{
default steadyState;
}
gradSchemes
{
default Gauss linear;
grad(U) cellLimited Gauss linear 1;
grad(k) cellLimited Gauss linear 1;
grad(omega) cellLimited Gauss linear 1;
}
divSchemes
{
default none;
div(phi,U) bounded Gauss upwind
div(phi,nuTilda) bounded Gauss upwind;
div(phi,k) bounded Gauss upwind;
div(phi,omega) bounded Gauss upwind;
div((nuEff*dev2(T(grad(U))))) Gauss linear;
}
laplacianSchemes
{
default Gauss linear corrected;
laplacian(diffusivity,cellDisplacement) Gauss linear uncorrected;
}
interpolationSchemes
{
default linear;
}
fluxRequired
{
default no;
p ;
}
wallDist
{
method meshWave;
}
// ************************************************************************* //

42
Appendix B. Roughness effect on BL and k
Below, there is a demonstration of plots of the BL and turbulent kinetic energy for
different x/c points {0.22, 0.43, 0.73} of the blade suction side, at r/R=0.71. Such plots
have been useful to ensure that the model moves towards the right direction when it
comes to estimating the turbulence increase in the BL around the blade. The same trend
is recorded across the whole blade span. The specific r/R height has been selected as a
representative one.
0
10
20
30
40
50
60
70
0 20 40 60 80 100
No
rmal
-to
-su
rfac
e d
ista
nce
[m
m]
Urel [m/s]
suction side BL profile (r/R = 0.71, x/c = 0.22)
smooth
0.5mm
0
10
20
30
40
50
60
70
0 20 40 60
No
rmal
-to
-su
rfac
e d
ista
nce
[m
m]
k [m2/s2]
suction side turbulence kinetic energy (k) profile (r/R = 0.71, x/c = 0.22)
smooth
0.5mm

43
0
10
20
30
40
50
60
70
0 20 40 60 80
No
rmal
-to
-su
rfac
e d
ista
nce
[m
m]
Urel [m/s]
suction side BL profile (r/R = 0.71, x/c = 0.43)
smooth
0.5mm
0
10
20
30
40
50
60
70
0 10 20 30 40 50
No
rmal
-to
-su
rfac
e d
ista
nce
[m
m]
k [m2/s2]
suction side turbulence kinetic energy (k) profile (r/R = 0.71, x/c = 0.43)
smooth
0.5mm

44
0
10
20
30
40
50
60
70
0 20 40 60
No
rmal
-to
-su
rfac
e d
ista
nce
[m
m]
Urel [m/s]
suction side BL profile (r/R = 0.71, x/c = 0.73)
smooth
0.5mm
0
10
20
30
40
50
60
70
0 10 20 30 40
No
rmal
-to
-su
rfac
e d
ista
nce
[m
m]
k [m2/s2]
suction side turbulence kinetic energy (k) profile (r/R = 0.71, x/c = 0.73)
smooth
0.5mm

45
References
[1] “European Comission, Climate Action,” 2017. [Online]. Available:
http://ec.europa.eu/clima/policies/international/negotiations/paris_en.
[2] International Energy Agency, “World Energy Outlook 2016,” 2016.
[3] International Energy Agency, “Recent trends in the OECD: energy and CO2
emissions,” 2016.
[4] International Energy Agency, “Renewable energy continuing to increase market share,”
2016. [Online]. Available: http://www.iea.org/newsroom/news/2016/july/renewable-
energy-continuing-to-increase-market-share.html. [Accessed: 01-Jan-2016].
[5] Global Wind Energy Council, “Global Wind Statistics 2015,” 2016.
[6] “The Wind Power.” [Online]. Available:
http://www.thewindpower.net/country_en_17_sweden.php.
[7] “Vattenfall Annual and Sustainability report 2015,” 2015.
[8] “Vattenfall.” [Online]. Available: https://corporate.vattenfall.com/about-
vattenfall/vattenfall-in-brief/.
[9] International Renweable Energy Agency, “RENEWABLE ENERGY
TECHNOLOGIES: COST ANALYSIS SERIES, Wind Power,” 2012.
[10] F. D. Bianchi, H. De Battista, and R. J. Mantz, “The Wind and Wind Turbines,” in Wind
Turbine Control Systems, 2007, pp. 7–28.
[11] “National Renewable Energy laboratory, Wind Energy Basics.” [Online]. Available:
https://www.nrel.gov/workingwithus/re-wind.html.
[12] B. Bhushan, “Surface Roughness Analysis and Measurement Techniques,” 2001.
[13] “The Home Of Surface Measurement.” [Online]. Available:
http://www.rubert.co.uk/faqs/roughness-parameters/.
[14] E. Sagol, M. Reggio, and A. Ilinca, “Issues concerning roughness on wind turbine
blades,” Renew. Sustain. Energy Rev., vol. 23, pp. 514–525, 2013.
[15] “Smart Blade, Performance Improvement for Wind Turbines.” [Online]. Available:
http://smart-blade.com/products-services/vortex-generators.html.
[16] “SENVION wind energy, Retrofits.” [Online]. Available:
https://www.senvion.com/global/en/wind-energy-solutions/service/retrofits/.
[17] A. Segalini, Wind Turbine Aerodynamics, Lecture notes. 2016.
[18] J. Gary L., “Wind Turbine Power,” in Wind Energy Systems, 2001, p. 4.1-4.55.
[19] Gurit, “Aerodynamics and Loads,” in Wind Energy Handbook, 2016.
[20] N. Hall, “National Aeronautics and Space Administration,” What is Drag. [Online].
Available: https://www.grc.nasa.gov/www/k-12/airplane/drag1.html.
[21] “VISCOUS INCOMPRESSIBLE FLOW, lecture 7.” [Online]. Available:
46
http://nptel.ac.in/courses/101103004/module5/lec7/3.html.
[22] C. von Ossietzky, “Viscosity and Reynolds Numbers.”
[23] A. . Johansson and S. Wallin, Turbulence lecture notes. Stockholm, 2012.
[24] M. van Dyke, An Album of Fluid Motion. Department of Mechanical Engineering,
Stanford University.
[25] “Boundary Layer Separation and Pressure Drag,” Aerospace Engineering, 2016.
[Online]. Available: http://aerospaceengineeringblog.com/boundary-layer-separation-
and-pressure-drag/.
[26] H. K. Versteeg and W. Malalasekera, An Introduction to Computational Fluid
Dynamics. 2004.
[27] J. F. Wendt et al., Computational Fluid Dynamics, AN INTRODUCTION, Third.
Springer.
[28] R. Fakhrai, “Conservation Equations, lecture notes.” 2015.
[29] R. Fakhrai, “Turbulence, lecture notes.” 2015.
[30] J. Jonkman, S. Butterfield, W. Musial, and G. Scott, “Definition of a 5-MW reference
wind turbine for offshore system development,” 2009.
[31] R. Chow and C. P. van Dam, “Verification of computational simulations of the NREL
5 MW rotor with a focus on inboard flow separation,” Wind Energy, 2012.
[32] B. Dose, B. Stoevesandt, and J. Peinke, “Studying the effect of blade deflections on the
aerodynamic performance of wind turbine blades using OpenFOAM.” pp. 2–5.
[33] R. P. J. O. M. van Rooij and W. A. Timmer, “Roughness Sensitivity Considerations for
Thick Rotor Blade Airfoils,” 2003.
[34] C. Huang, K. Yang, Q. Liu, L. Zhang, J. Bai, and J. Xu, “A study on performance
influences of airfoil aerodynamic parameters and evaluation indicators for the
roughness sensitivity on wind turbine blade,” Sci. China Technol. Sci., vol. 54, no. 11,
pp. 2993–2998, 2011.
[35] N. Ren and J. Ou, “Dust Effect on the Performance of Wind Turbine Airfoils,” J.
Electromagn. Anal. Appl., vol. 1, no. June, pp. 102–107, 2009.
[36] C. J. Greenshields, “OpenFOAM User Guide,” no. December. 2015.
[37] J. Jonkman, “FAST, An aeroelastic computer-aided engineering (CAE) tool for
horizontal axis wind turbines.” [Online]. Available: https://nwtc.nrel.gov/FAST.
[38] H. Olivares-Espinosa and S. Breton, “Characterization of wind turbine wakes in a non-
sheared turbulent flow,” in International Conference on Aerodynamics of Offshore
Wind Energy Systems and Wakes (ICOWES2013), 2013, no. June, pp. 435–449.
[39] Q. Zhao, C. Sheng, and A. Afjeh, “Computational Aerodynamic Analysis of Offshore
Upwind and Downwind Turbines,” J. Aerodyn., vol. 2014, 2014.