adaptive signal processing class project adaptive interacting multiple model technique for tracking...
TRANSCRIPT

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Adaptive Interacting Multiple Model Technique
for Tracking Maneuvering Targets
Viji Paul, Sahay Shishir Brijendra,
Krishnamoorthy Iyer, Meles Gebreyesus
Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Outline of the Presentation
• Introduction to the problem
• Multiple Model Technique
• IMM and the models used
• Multiple Target Scenario
• Simulation results
• Adaptive Cancellation of Oscillation Effect
• Simulation results

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Outline of the Presentation
• Introduction to the problem
• Multiple Model Technique
• IMM and the models used
• Multiple Target Scenario
• Simulation results
• Adaptive Cancellation of Oscillation Effect
• Simulation results

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Radar site
Observed Position
Predicted Position
Error
Target Tracking Using Surveillance radar

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
•In the MM estimation, it is assumed that the possible system behavior patterns, called system modes, can be represented by a set of models.
•A bank of filters runs in parallel at every time, each based on a particular model, to obtain the model-conditional estimates.
•Overall state estimate is a certain combination of these model-conditional estimates.
Multiple Model Estimation

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Multiple Model Estimation
A Bayesian framework starting with prior probabilities of each model being correct (i.e. the system is in a particular mode) is used.
The model, assumed to be in effect throughout the process, is one of r possible models (the system is in one of r modes)

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Multiple Model Estimation
The prior probability that is correct (i.e. the system is in mode j) is
j = 1…….r
where is the prior information; and

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Multiple Model Estimation
The output of each mode-matched filter:
•Mode-conditioned State Estimate
•Associated State Error Covariance Matrix
•Mode Likelihood Function

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Multiple Model Structure

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Output Estimate
After the filters are initialized, they run recursively
on their own estimates.
Their likelihood functions are used to update the
mode probabilities.
The latest mode probabilities are used to combine
the mode-conditioned estimates and covariances.

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Output Estimate
The combination of mode-conditioned estimates is therefore done as follows
And the covariance of the combined estimate is

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Multiple Model Approach for Switching Models
Consider an example with two models, and at time, k =2 one has possible histories.l li ,1 li ,2
1 1 1
2 1 2
3 2 1
4 2 2

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Multiple Model Approach for Switching Models
The mode history – or sequence of models – through
time k is denoted as
where is the model index at time k from history l. It is important to note that number of histories increases exponentially with time.

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Interacting Multiple Model Algorithm

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Steps in IMM
One cycle of the algorithm consists of the following:
Step 1: Calculation of the mixing probabilities.
Step2: Mixing- Calculation of mixed initial conditions
Step3: Mode matched filtering.
Step4: Mode probability update.
Step5: Estimate and covariance combination
jM

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Block Diagram of the Tracking Routine
Model jKalman
Filter
j = 1…r
IMM Block
State estimates for established target
State estimate covariancefor established target
Model probabilities forestablished target
Sensor measurements

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Tracking Maneuvering target
A weaving target track constructed of linked coordinated turns

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
IMM
One cycle of the algorithm consists of the following:
Step 1: Calculation of the mixing probabilities.
The probability that mode was in effect at time k-1
given that is in effect at k, conditioned on is:
jM

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
IMM Algorithm
The above are the mixing probabilities, which can be written as
Where the normalizing constants are
j = 1,…,r.

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
IMM Algorithm
Step 2: Mixing.
Starting with one computes the mixed initial
condition for the filter matched to
j = 1,…,r
Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
IMM Algorithm
The covariance corresponding to the above is

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
IMM Algorithm
Step 3: Mode-matched filtering.
The estimate and covariance are used as input to the
filter matched to which uses
to yield and
The likelihood functions corresponding to the r filters
)(kM j
are computed using the mixed initial condition and the associated covariance

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
IMM Algorithm
Step 4: Mode probability update. This is done as follows

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
IMM Algorithm
Step 5: Estimate and covariance combination.
Combination of the model-conditioned estimates
and covariances is done according to the mixture
equations

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
There are total four targets moving with different kinematics.
Initial Range : Range of the target at time zero.
Initial Theta : Azimuth of the target at time zero.
Split no : Number of splits into which time is partitioned.
No of Scans : Number of scans in each time split.
Start Scan : Starting scan number of each partition of time.
End Scan : Ending scan number of each partition of time.
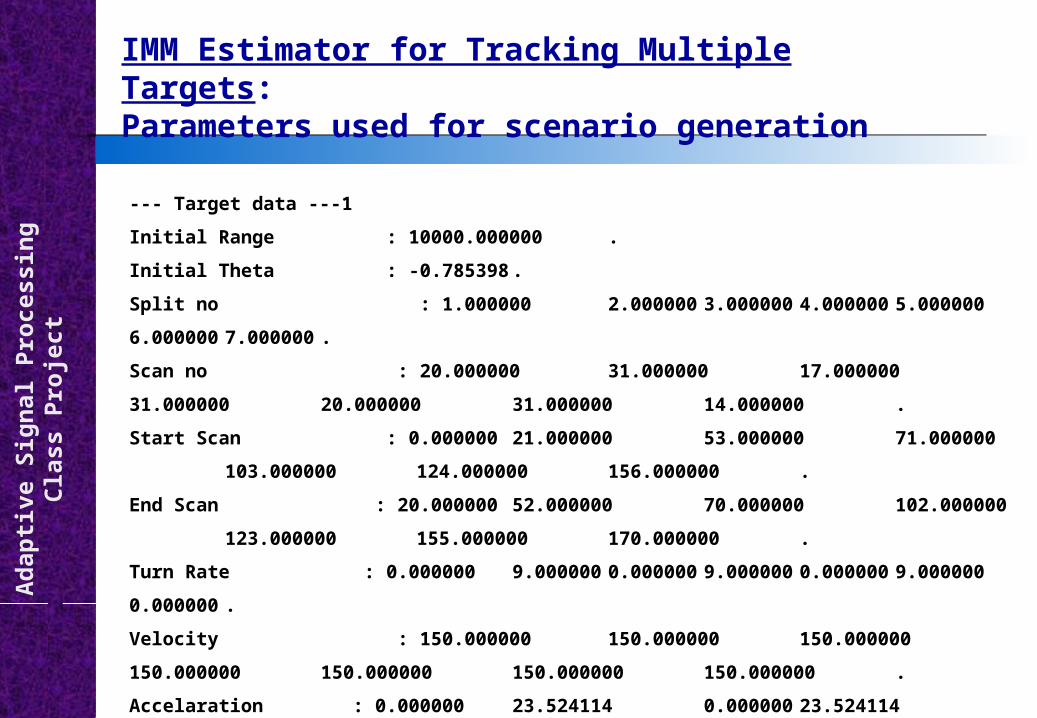
IMM Estimator for Tracking Multiple Targets:Parameters used for scenario generation

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Turn Rate : Amount of course change in degree per second.
Velocity : Velocity in each partition of time.
Acceleration : Acceleration in each partition of time.
Heading : Heading in each partition of time.
IMM Estimator for Tracking Multiple Targets:Parameters used for scenario generation
Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
--- Target data ---1
Initial Range : 10000.000000 .
Initial Theta : -0.785398 .
Split no : 1.000000 2.000000 3.000000 4.000000 5.000000 6.000000 7.000000 .
Scan no : 20.000000 31.000000 17.000000 31.000000 20.000000 31.000000 14.000000 .
Start Scan : 0.000000 21.000000 53.000000 71.000000 103.000000 124.000000 156.000000 .
End Scan : 20.000000 52.000000 70.000000 102.000000 123.000000 155.000000 170.000000 .
Turn Rate : 0.000000 9.000000 0.000000 9.000000 0.000000 9.000000 0.000000 .
Velocity : 150.000000 150.000000 150.000000 150.000000 150.000000 150.000000 150.000000 .
Accelaration : 0.000000 23.524114 0.000000 23.524114 0.000000 23.524114 0.000000 .
Heading : -0.785398 1.374447 -0.785398 1.374447 -0.785398 1.374447 -0.785398 .
IMM Estimator for Tracking Multiple Targets:Parameters used for scenario generation

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
--- Target data ---2
Initial Range : 10000.000000 .
Initial Theta : 0.785398 .
Split no : 1.000000 .
Scan no : 170.000000 .
Start Scan : 0.000000 .
End Scan : 170.000000 .
Turn Rate : 0.000000 .
Velocity : 100.000000 .
Accelaration : 0.000000 .
Heading : 0.785398 .
IMM Estimator for Tracking Multiple Targets:Parameters used for scenario generation

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
--- Target data ---3
Initial Range : 10000.000000 .
Initial Theta : -2.356194 .
Split no : 1.000000 2.000000 3.000000 4.000000 .
Scan no : 30.000000 34.000000 31.000000 72.000000 .
Start Scan : 0.000000 31.000000 66.000000 98.000000 .
End Scan : 30.000000 65.000000 97.000000 170.000000 .
Turn Rate : 0.000000 -9.000000 9.000000 0.000000 .
Velocity : 100.000000 100.000000 100.000000 100.000000 .
Accelaration : 0.000000 15.682742 15.682742 15.682742 .
Heading : -2.356194 3.141593 -2.552544 -0.792379 .
IMM Estimator for Tracking Multiple Targets:Parameters used for scenario generation

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
--- Target data ---4
Initial Range : 10000.000000 .
Initial Theta : 2.356194 .
Split no : 1.000000 2.000000 3.000000 4.000000 .
Scan no : 30.000000 34.000000 31.000000 72.000000 .
Start Scan : 0.000000 31.000000 66.000000 98.000000 .
End Scan : 30.000000 65.000000 97.000000 170.000000 .
Turn Rate : 0.000000 -9.000000 9.000000 0.000000 .
Velocity : 100.000000 100.000000 100.000000 100.000000 .
Accelaration : 0.000000 15.682742 15.682742 15.682742 .
Heading : 2.356194 1.570796 2.159845 -2.363176 .
IMM Estimator for Tracking Multiple Targets:Parameters used for scenario generation

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Maneuvering ModelsConstant Velocity Model
• For small sample intervals T, the following model is commonly used (Blackman & Popoli, Sec. 4.2.2):
k
ky
y
x
x
ky
y
x
x
U
v
p
v
p
T
T
v
p
v
p
1000
100
0010
001
1

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Maneuvering ModelsConstant Acceleration Model
k
kx
x
x
kx
x
x
U
a
v
p
T
TT
a
v
p
100
1021
2
1

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Maneuvering ModelsCoordinated Turn Model
sin (1 cos )1 0
0 cos 0 sin( ) ( 1)
1 cos sin0 1
0 sin 0 cos
T T
T Tx k x k
T T
T T

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Multi Target Scenario
10000
20000
30000
30
210
60
240
90
270
120
300
150
330
180 0

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Variation of Model weights
0 20 40 60 80 100 120 140 1600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9Fot T1
Constant Velocity
Constant accelerationCoordinated Turn
For Target 1
Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
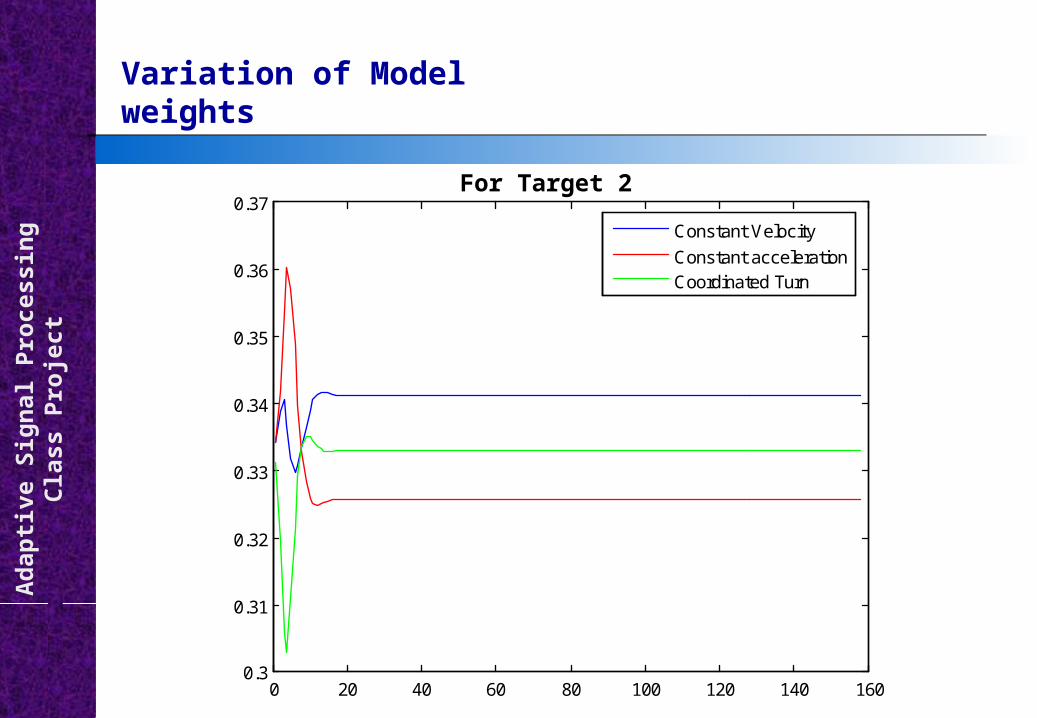
0 20 40 60 80 100 120 140 1600.3
0.31
0.32
0.33
0.34
0.35
0.36
0.37Fot T2
Constant Velocity
Constant accelerationCoordinated Turn
Variation of Model weights
For Target 2

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Variation of Model weights
0 20 40 60 80 100 120 140 1600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9Fot T3
Constant Velocity
Constant accelerationCoordinated Turn
For Target 3

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Variation of Model weights
0 20 40 60 80 100 120 140 1600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9Fot T4
Constant Velocity
Constant accelerationCoordinated Turn
For Target 4

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Tracking From Unstable PlatformThe environment strongly impacts radar performance

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Platform Oscillations
•Roll, Yaw and Pitch
•Only Roll has been considered in this simulation.
•All the three motions are sinusoidal or DC shifted sinusoidal.
•At max, frequency of the sinusoid is about 1/10 Hz.

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Physically stabilized beam

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Tracking Maneuvering target
A weaving target track constructed of linked coordinated turns.
Perturbations are seen because of platform motion.

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Target Tracking Data Flow
Estimated State
Target
Sensor(Obsvn Device)
Signal / Data Pre-
Processor
Tracker (State Estimation / Data Association)
Electro Magnetic or Acoustic Energy
Channel Signal / Raw Data
Tracking Algorithm
Data Conversion Decoupling Detection-Subsystem
Typical Target tracking system

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
10000
20000
30000
30
210
60
240
90
270
120
300
150
330
180 0
Measurement corrupted by Oscillations
•Increased deterioration at larger ranges.

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
0 20 40 60 80 100 120 140 1600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8Fot T1
Constant Velocity
Constant accelerationCoordinated Turn
For Target 1
Model weight variations due to Platform Oscillations

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
0 20 40 60 80 100 120 140 1600.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8Fot T2
Constant Velocity
Constant accelerationCoordinated Turn
For Target 2
Model weight variations due to Platform Oscillations

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
0 20 40 60 80 100 120 140 1600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8Fot T3
Constant Velocity
Constant accelerationCoordinated Turn
For Target 3
Model weight variations due to Platform Oscillations

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
0 20 40 60 80 100 120 140 1600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9Fot T4
Constant Velocity
Constant accelerationCoordinated Turn
For Target 4
Model weight variations due to Platform Oscillations
Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
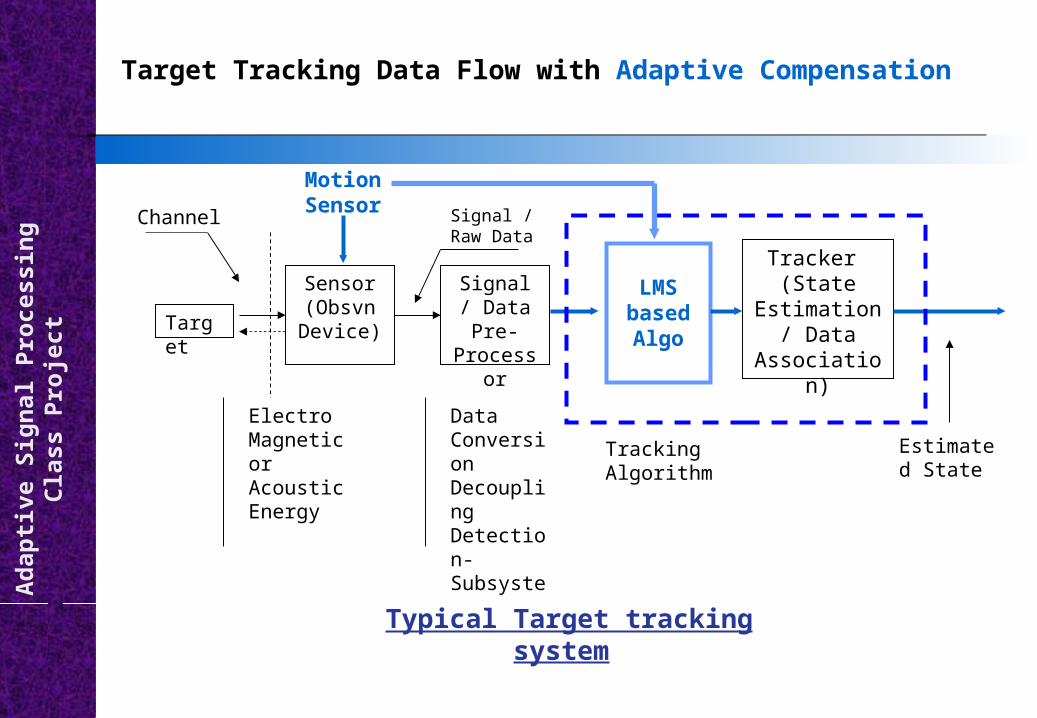
Target Tracking Data Flow with Adaptive Compensation
Estimated State
Target
Sensor(Obsvn Device)
Signal / Data Pre-
Processor
Tracker (State
Estimation / Data
Association)
Electro Magnetic or Acoustic Energy
Channel Signal / Raw Data
Tracking Algorithm
Data Conversion Decoupling Detection-Subsystem
Typical Target tracking system
Motion Sensor
LMS based Algo

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Measurements corrupted by a proportional multiplication of oscillation
50 100 150 200 250 300 350 400 450 500
1.54
1.55
1.56
1.57
1.58
1.59
1.6

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Reminds You of Something ???
Output from the Gyro
Modified form of Gyro output
Signal from the radar

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
10000
20000
30000
30
210
60
240
90
270
120
300
150
330
180 0
Compensated for Platform Oscillation

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Its OK in Theory but is the Target a Sitting Duck ?
Operational Solution:
•Sea state does not change drastically.
•Ships are always in formation during an operation.
•During the pre-detection phase, i.e. while approaching the Theatre of Operation, the weights of the Adaptive Filter can be “set” using the LMS Algorithm.
•The same weights can then be used during the Target Detection phase.
Ship with Surv
Radar
Friendly Ship in Compan
y

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
0 20 40 60 80 100 120 140 1600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9Fot T1
Constant Velocity
Constant accelerationCoordinated Turn
Compensated for Platform Oscillation
For Target 1

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
0 20 40 60 80 100 120 140 1600.2
0.25
0.3
0.35
0.4
0.45
0.5Fot T2
Constant Velocity
Constant accelerationCoordinated Turn
Compensated for Platform Oscillation
For Target 2

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
0 20 40 60 80 100 120 140 1600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9Fot T3
Constant Velocity
Constant accelerationCoordinated Turn
Compensated for Platform Oscillation
For Target 3

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
0 20 40 60 80 100 120 140 1600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9Fot T4
Constant Velocity
Constant accelerationCoordinated Turn
Compensated for Platform Oscillation
For Target 4

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Conclusion
•Analyzed Multiple Model Technique
•IMM based estimation is implemented
•Generated a Multi Target Scenario
•Applied IMM
•Verified the algorithm
•Introduced Platform Oscillations
•Added LMS based adaptive compensation

Ad
apti
ve S
ign
al P
roce
ssin
gC
lass
Pro
ject
Thank you