active power control response from … · 2.4.1 wind turbine development .....- 15 - 2.4.2 grid...
TRANSCRIPT
ACTIVE POWER CONTROL
RESPONSE FROM LARGE
OFFSHORE WIND FARMS
A thesis submitted in partial fulfilment for the degree of Engineering Doctorate
This research programme was carried out in collaboration with GE Energy’s Power Conversion business
by Dominic Banham-Hall
Supervised by Dr Gareth Taylor
Brunel Institute of Power Systems, Department of Electronic and Computer Engineering, Brunel University, UK
March 2012

ii
Abstract
The GB power system will see huge growth in transmission connected wind farms over
the next decade, driven by European clean energy targets. The majority of the UK’s wind
development is likely to be offshore and many of these wind farms will be interfaced to
the grid through power converters. This will lead to a loss of intrinsic inertia and an
increasing challenge for the system operator to keep grid frequency stable. Given this
challenge, there is increasing interest in understanding the capabilities of converter control
systems to provide a synthesised response to grid transients. It is interesting to consider
whether this response should be demanded of wind turbines, with a consequential
reduction in their output, or if advanced energy storage can provide a viable solution.
In order to investigate how large offshore wind farms could contribute to securing the
power system, wind turbine and wind farm models have been developed. These have been
used to design a patented method of protecting permanent magnet generator’s converters
under grid faults. Furthermore, these models have enabled investigation of methods by
which a wind turbine can provide inertial and frequency response. Conventionally inertial
response relies on the derivative of a filtered measurement of system frequency; this
introduces either noise, delay or both. This research proposes alternative methods, without
these shortcomings, which are shown to have fast response. Overall, wind farms are
shown to be technically capable of providing both high and low frequency response;
however, holding reserves for low frequency response inevitably requires spilling wind.
Wind’s intermittency and full output operation are in tension with the need of the power
system for reliable frequency response reserves. This means that whilst wind farms can
meet the technical requirements to hold reserves, they bid uncompetitive prices in the
market. This research shows that frequency response market prices are likely to rise in
future suggesting that the Vanadium Redox Flow Battery is one technology which could
enter this market and also complement wind power. Novel control incorporating fuzzy
logic to manage the battery is developed to allow a hybrid wind and storage system to
aggregate the benefits of frequency response and daily price arbitrage. However, the
research finds that the costs of smoothing wind power output are a burden on the store’s
revenue, leading to a method of optimising the combined response from an energy store
and generator that is the subject of a patent application. Furthermore, whilst positive
present value may be derived from this application, the long payback periods do not
represent attractive investments without a small storage subsidy.

iii
Acknowledgements
I would like to start by thanking my industrial supervisor, Dr Chris Smith, for guiding this
project into interesting areas and providing me with opportunities to present this work at
many levels within the company. Dr Gary Taylor, my principle academic supervisor has
been a source of interesting ideas, new contacts and experience to ensure this project stays
relevant and that I stay abreast of wider developments in power engineering, I am in your
debt. I would also like to thank Professor Malcolm Irving, who as second supervisor has
had disproportionate involvement in the less interesting task of paper reviews, but has
always provided useful insight.
I acknowledge here the contribution of the Brunel University Environmental Technology
Engineering Doctorate centre. In particular I would like to recognise the contribution of
the research office at Brunel University. This office has always been prompt in dealing
with admin and practical matters, for which I particularly thank Janet Wheeler.
I would also like to thank the directors and staff of GE Energy for their support of this
research, particularly the Modelling team, the Drives development team, Derek Grieve,
the External Communications team, the Energy business and those who were once in the
Renewables department. The input to my project from across the company has
undoubtedly shaped it and made it a far more enjoyable experience.
I would particularly like to thank National Grid’s Jonathan Horne, Helge Urdal and Neil
Rowley for fielding endless Grid Code questions and then, when they had dried up,
starting all over again to field endless Electricity Markets questions. Jonathan and Helge’s
input to progress meetings has contributed significantly to the shape of the research.
The project has been financially supported by The Engineering and Physical Sciences
Research Council (EPSRC) and GE Energy, this support is gratefully acknowledged here.
Personally I would like to thank my wife, Katharine, for supporting me not only at the
start of this research but throughout. Finally, I would like to thank my daughter, Emma,
for providing me with an expensive reason to hurry up and finish!

iv
Contents
ABSTRACT.................................................................................................................... II
ACKNOWLEDGEMENTS ............................................................................................. III
CONTENTS................................................................................................................... IV
LIST OF FIGURES.......................................................................................................VII
LIST OF TABLES..........................................................................................................XI
LIST OF ABBREVIATIONS.........................................................................................XIII
MATHEMATICAL NOTATION .....................................................................................XV
EXECUTIVE SUMMARY............................................................................................XVII
Challenges for Wind Power and the Power System........................................... xvii Energy Storage to Complement Wind Power.................................................... xviii Aims and Objectives ......................................................................................... xviii Contributions to Knowledge ................................................................................ xix Publications ........................................................................................................ xxi
1 INTRODUCTION................................................................................................. - 1 -
1.1 OVERVIEW............................................................................................... - 1 - 1.2 WIND POWER DEVELOPMENT IN THE UK ............................................ - 1 - 1.3 AN OPPORTUNITY FOR ENERGY STORAGE? ...................................... - 2 - 1.4 RESEARCH OBJECTIVES ....................................................................... - 3 - 1.5 CONTRIBUTIONS TO KNOWLEDGE....................................................... - 4 - 1.6 ENGD SCHEME........................................................................................ - 5 - 1.7 THESIS OVERVIEW ................................................................................. - 6 -
2 WIND POWER AND THE GB GRID ................................................................. - 10 -
2.1 INTRODUCTION..................................................................................... - 10 - 2.2 THE GROWTH OF THE WIND POWER INDUSTRY .............................. - 10 - 2.3 THE UK WIND INDUSTRY...................................................................... - 12 - 2.4 WIND FARM DEVELOPMENT................................................................ - 14 -
2.4.1 Wind Turbine Development ............................................................... - 15 - 2.4.2 Grid Connection................................................................................. - 21 -
2.5 CHANGING GENERATION CHARACTERISTICS .................................. - 24 - 2.5.1 Conventional Synchronous Plant ....................................................... - 24 - 2.5.2 Grid Faults......................................................................................... - 27 - 2.5.3 Grid Inertia......................................................................................... - 27 - 2.5.4 Grid Frequency.................................................................................. - 28 -
2.6 A CHALLENGE FOR THE GB GRID....................................................... - 28 - 2.6.1 The UK’s Offshore Wind Farms ......................................................... - 28 - 2.6.2 The Grid’s Frequency Challenge ....................................................... - 29 - 2.6.3 Power System Oscillation .................................................................. - 31 -
2.7 POTENTIAL APPLICATION OF ENERGY STORAGE? .......................... - 31 - 2.8 SUMMARY.............................................................................................. - 34 -
3 MODELLING OF FULL CONVERTER WIND TURBINES ................................ - 35 -
3.1 INTRODUCTION..................................................................................... - 35 - 3.2 AERODYNAMICS ................................................................................... - 35 -
3.2.1 Wind Modelling .................................................................................. - 36 - 3.2.2 Blade Modelling ................................................................................. - 38 -
3.3 DRIVE TRAIN.......................................................................................... - 39 - 3.3.1 Geared .............................................................................................. - 40 - 3.3.2 Direct-drive ........................................................................................ - 41 -
3.4 ELECTRICAL SYSTEM........................................................................... - 42 -

v
3.4.1 Park and Clarke’s Transforms ........................................................... - 42 - 3.4.2 Induction Generator ........................................................................... - 44 - 3.4.3 Permanent Magnet Generator ........................................................... - 47 - 3.4.4 Converter........................................................................................... - 48 -
3.5 CONTROL SYSTEM ............................................................................... - 51 - 3.5.1 Converter........................................................................................... - 51 - 3.5.2 Wind Turbine ..................................................................................... - 55 - 3.5.3 Wind Farm......................................................................................... - 60 -
3.6 SOFTWARE............................................................................................ - 62 - 3.6.1 Matlab-Simulink ................................................................................. - 62 - 3.6.2 DIgSILENT PowerFactory.................................................................. - 63 -
3.7 VALIDATION........................................................................................... - 64 - 3.7.1 Wind Model ....................................................................................... - 65 - 3.7.2 Shaft Model ....................................................................................... - 66 - 3.7.3 PMG Model ....................................................................................... - 67 - 3.7.4 Converter Control .............................................................................. - 68 -
3.8 SUMMARY.............................................................................................. - 69 -
4 GRID CONNECTION OF FULL CONVERTER WIND TURBINES .................... - 70 -
4.1 INTRODUCTION..................................................................................... - 70 - 4.2 GRID FAULT RIDE-THROUGH............................................................... - 71 -
4.2.1 Grid Code Requirements ................................................................... - 71 - 4.2.2 Fully Fed Induction Generator ........................................................... - 72 - 4.2.3 Model Validation ................................................................................ - 74 - 4.2.4 Fully Fed Permanent Magnet Generator............................................ - 78 - 4.2.5 Choppers and Brake Resistors .......................................................... - 83 - 4.2.6 Reduced Order Model ....................................................................... - 89 -
4.3 FREQUENCY RESPONSE ..................................................................... - 91 - 4.3.1 Grid Code Requirements ................................................................... - 92 - 4.3.2 Control Methods for Frequency Response......................................... - 96 - 4.3.3 Frequency Response Capability ...................................................... - 101 -
4.4 SYNTHETIC INERTIA ........................................................................... - 107 - 4.4.1 Grid Code Developments................................................................. - 107 - 4.4.2 Control Methods for Providing Inertia............................................... - 108 - 4.4.3 Inertial Response Capability ............................................................ - 112 -
4.5 SUMMARY............................................................................................ - 117 -
5 ENERGY STORAGE DEVELOPMENT........................................................... - 119 -
5.1 INTRODUCTION................................................................................... - 119 - 5.2 ENERGY STORAGE TECHNOLOGIES................................................ - 120 -
5.2.1 Pumped Hydro................................................................................. - 120 - 5.2.2 Compressed Air Energy Storage ..................................................... - 121 - 5.2.3 Conventional Batteries..................................................................... - 122 - 5.2.4 Advanced Redox Flow Batteries...................................................... - 125 - 5.2.5 Thermal Storage Systems ............................................................... - 128 - 5.2.6 Flywheels ........................................................................................ - 128 - 5.2.7 Supercapacitors............................................................................... - 129 - 5.2.8 Superconducting Magnetic Energy Storage..................................... - 129 - 5.2.9 Hydrogen......................................................................................... - 130 -
5.3 ENERGY STORAGE ECONOMICS...................................................... - 130 - 5.3.1 Power Costs .................................................................................... - 130 - 5.3.2 Energy Costs................................................................................... - 131 - 5.3.3 Economic Comparison..................................................................... - 132 -
5.4 VANADIUM REDOX FLOW BATTERY DEVELOPMENT...................... - 135 - 5.4.1 Historic Development....................................................................... - 135 - 5.4.2 Present Application.......................................................................... - 137 - 5.4.3 Future Advances ............................................................................. - 137 -

vi
5.5 SUMMARY............................................................................................ - 138 -
6 MODELLING OF VANADIUM REDOX FLOW BATTERIES ........................... - 139 -
6.1 INTRODUCTION................................................................................... - 139 - 6.2 VRFB ELECTROCHEMICAL MODEL ................................................... - 140 -
6.2.1 Fully Detailed................................................................................... - 140 - 6.2.2 Fully Simplified ................................................................................ - 141 - 6.2.3 Power System ................................................................................. - 141 -
6.3 ELECTRICAL SYSTEM MODEL ........................................................... - 144 - 6.3.1 Step-up Converter ........................................................................... - 145 - 6.3.2 Power Converter Model ................................................................... - 146 - 6.3.3 Ancillaries ........................................................................................ - 147 - 6.3.4 Wind Farm....................................................................................... - 147 -
6.4 MODEL VALIDATION ........................................................................... - 148 - 6.4.1 Software .......................................................................................... - 148 - 6.4.2 Flow Battery Voltage........................................................................ - 149 - 6.4.3 Round Trip Efficiency....................................................................... - 151 -
6.5 CONVERTER CONTROL SYSTEM...................................................... - 152 - 6.5.1 Converter Control Scheme .............................................................. - 153 - 6.5.2 Grid Fault Ride-through Simulations ................................................ - 155 -
6.6 WIND FARM AND VRFB SYSTEM CONTROL..................................... - 157 - 6.6.1 Output Smoothing............................................................................ - 159 - 6.6.2 Frequency Response....................................................................... - 160 - 6.6.3 State of Charge ............................................................................... - 166 - 6.6.4 Arbitrage.......................................................................................... - 169 - 6.6.5 Integrated Controller ........................................................................ - 169 -
6.7 SUMMARY............................................................................................ - 172 -
7 FREQUENCY RESPONSE ECONOMICS ...................................................... - 173 -
7.1 INTRODUCTION................................................................................... - 173 - 7.2 ECONOMIC MODELLING METHODOLOGY........................................ - 174 -
7.2.1 Electricity Market Structure .............................................................. - 176 - 7.2.2 Scenario Analysis ............................................................................ - 177 - 7.2.3 Energy Store Capacity..................................................................... - 179 - 7.2.4 Discounted Cash Flow Analysis....................................................... - 180 - 7.2.5 Market Reform................................................................................. - 181 -
7.3 ECONOMIC DATA ................................................................................ - 182 - 7.3.1 Renewable Obligation Certificates ................................................... - 182 - 7.3.2 Energy Price and System Price Data............................................... - 182 - 7.3.3 Imbalance........................................................................................ - 184 - 7.3.4 Frequency Response Market........................................................... - 185 - 7.3.5 Arbitrage Scheduling ....................................................................... - 188 - 7.3.6 VRFB Costs..................................................................................... - 190 - 7.3.7 Discount Rate and Sensitivity Analysis ............................................ - 190 -
7.4 ENERGY STORAGE REVENUES ........................................................ - 191 - 7.4.1 Integrated Energy Store Revenues.................................................. - 192 - 7.4.2 Independent Energy Store Revenues .............................................. - 196 - 7.4.3 Affiliated Energy Store Revenues .................................................... - 197 - 7.4.4 Arbitrage Impacts ............................................................................ - 200 -
7.5 NET PRESENT VALUE......................................................................... - 201 - 7.5.1 Integrated Energy Store................................................................... - 201 - 7.5.2 Optimal Power Rating...................................................................... - 204 - 7.5.3 Optimal Energy Rating..................................................................... - 205 - 7.5.4 Affiliated Energy Store Revenues .................................................... - 207 - 7.5.5 Discount Rate Sensitivity ................................................................. - 208 -
7.6 ALTERNATIVES TO STORAGE ........................................................... - 208 - 7.6.1 Curtailment of wind power ............................................................... - 209 -

vii
7.6.2 Interconnection ................................................................................ - 210 - 7.6.3 Conventional Generation ................................................................. - 210 -
7.7 SUMMARY............................................................................................ - 214 -
8 CONCLUSIONS AND FURTHER WORK ....................................................... - 216 -
8.1 MODELLING OF WIND TURBINES...................................................... - 216 - 8.2 GRID CONNECTION OF WIND TURBINES ......................................... - 217 - 8.3 VANADIUM REDOX FLOW BATTERY ENERGY STORAGE ............... - 219 - 8.4 FREQUENCY RESPONSE FROM WIND AND ENERGY STORAGE... - 220 - 8.5 FUTURE WORK.................................................................................... - 221 -
9 APPENDICES................................................................................................. - 224 -
9.1 WIND MODELLING............................................................................... - 224 - 9.1.1 Ziggurat Algorithm ........................................................................... - 224 -
9.2 FULL ENERGY STORAGE COMPARISON .......................................... - 225 - 9.2.1 Pumped Hydro................................................................................. - 225 - 9.2.2 Compressed Air Energy Storage ..................................................... - 225 - 9.2.3 Lead Acid ........................................................................................ - 226 - 9.2.4 Nickel Cadmium .............................................................................. - 226 - 9.2.5 Sodium Sulphur ............................................................................... - 227 - 9.2.6 Sodium Metal Halide (Zebra) ........................................................... - 227 - 9.2.7 Lithium Ion....................................................................................... - 228 - 9.2.8 Metal Air .......................................................................................... - 228 - 9.2.9 Vanadium Redox ............................................................................. - 229 - 9.2.10 Zinc Bromine ................................................................................... - 229 - 9.2.11 Polysulphide Bromine ...................................................................... - 230 - 9.2.12 Superconducting Magnetic Energy Store......................................... - 230 - 9.2.13 Supercapacitors............................................................................... - 230 - 9.2.14 Flywheels ........................................................................................ - 231 - 9.2.15 Thermal ........................................................................................... - 231 -
10 REFERENCES................................................................................................ - 232 -
List of Figures Figure 1.1: National Grid's 'Gone Green' capacity projections for 2020/2021 (right)
compared to 2010/11 (left).......................................................................................- 1 - Figure 1.2: National Grid's [3] Projections for Reserve Requirements ...........................- 2 - Figure 1.3: Energy Research Partnership's [4] assessment of the scale of challenges facing
the power system and the solutions that energy storage systems offer....................- 3 - Figure 2.1: Global Installed Wind Power Growth .........................................................- 11 - Figure 2.2: Wind Markets by Installed Capacity ...........................................................- 11 - Figure 2.3: North Sea Gas Reserves according to DECC [8] statistics .........................- 12 - Figure 2.4: UK Continental Shelf Water Depth according to DBERR[9].....................- 13 - Figure 2.5: European Offshore Wind Resources, Copyright © 1989 by Risø National
Laboratory, Roskilde, Denmark, used with permission.........................................- 13 - Figure 2.6: Pöyry’s [11] Assessment of the Impact of Wind Generation on the UK in 2030
................................................................................................................................- 14 - Figure 2.7: Typical Offshore Wind Farm Arrangement (Photos courtesy of GE Energy
Power Conversion).................................................................................................- 15 - Figure 2.8: Market Share of the Different Wind Turbine Types (from Hansen and Hansen
[12], with modified legend)....................................................................................- 16 - Figure 2.9: Fixed Speed Induction Generator Wind Turbine ........................................- 16 - Figure 2.10: Variable Speed Induction Generator Wind Turbine..................................- 17 - Figure 2.11: Doubly Fed Induction Generator Wind Turbine .......................................- 18 - Figure 2.12: Fully Fed Synchronous Generator Wind Turbine .....................................- 19 -

viii
Figure 2.13: Fully Fed Induction Generator Wind Turbine...........................................- 20 - Figure 2.14: Fully Fed Permanent Magnet Generator Wind Turbine............................- 20 - Figure 2.15: Offshore Wind Farm with AC Connection ...............................................- 22 - Figure 2.16: Offshore Wind Farm with DC Connection ...............................................- 23 - Figure 2.17: A map of the offshore supergrid from Offshore Grid [26]........................- 24 - Figure 2.18: Synchronous Generator and Single Phase Equivalent Circuit...................- 24 - Figure 2.19: Synchronous Machine Vector Diagrams...................................................- 25 - Figure 2.20: Phasor Diagram under Normal (left) and Suppressed (right) Voltage ......- 27 - Figure 2.21: Effect of Frequency Decrease on Load Angle and Torque .......................- 28 - Figure 2.22: GB System Frequency 27th May 2008......................................................- 30 - Figure 2.23: National Grid’s [33] Projection for Requirement for Frequency Response
(The solid line represents the typical requirement, with maximum and minimum requirements shown by the dashed lines)...............................................................- 32 -
Figure 2.24: Wind Output During Periods of Peak System Demand according to National Grid [38].................................................................................................................- 33 -
Figure 3.1: Full Converter Wind Turbine Model Elements...........................................- 35 - Figure 3.2: Wind Model Structure .................................................................................- 37 - Figure 3.3: Typical Wind Turbine Performance Curve .................................................- 38 - Figure 3.4: Wind Turbine Drive Train System ..............................................................- 40 - Figure 3.5: Clarke’s Transform abc-αβγ ........................................................................- 43 - Figure 3.6: Park’s Transform αβγ to dq0 .......................................................................- 44 - Figure 3.7: Induction Machine Equivalent Circuit (left) and Field Oriented Control (right)-
45 - Figure 3.8: Permanent Magnet Generator Equivalent Circuit (left) and Vector Diagram
(right)......................................................................................................................- 47 - Figure 3.9: Two Level Power Converter........................................................................- 49 - Figure 3.10: Simplified Representation of the Power Converter...................................- 49 - Figure 3.11: Network Bridge Equivalent Output Circuit (left) and Vector Diagram (right) -
50 - Figure 3.12: Basic Conventional Power Converter Control Strategy............................- 52 - Figure 3.13: Control Block diagram for the DC link .....................................................- 52 - Figure 3.14: Alternative Power Converter Control Strategy .........................................- 54 - Figure 3.15: Rotor speed to power look-up table...........................................................- 56 - Figure 3.16: Direct Speed Control Overview ................................................................- 57 - Figure 3.17: Direct Speed Controller (A hill climbing approach) .................................- 58 - Figure 3.18: Direct Speed Control Torque Swings........................................................- 58 - Figure 3.19: Shaft Damping Controller Added to Maximum Power Tracker ...............- 59 - Figure 3.20: Pitch Controller for Indirect Speed Controlled turbine .............................- 60 - Figure 3.21: Wind Farm Controller, aggregating wind turbine availability and dispatching
real and reactive power or voltage set-points to the individual turbines ...............- 62 - Figure 3.22: Wind Speed Time Series Comparison (Top: Developed model, Bottom:
Aalborg Model)......................................................................................................- 65 - Figure 3.23: Wind Model Power Spectral Density Function Comparison (Top: Developed
model, Bottom: Aalborg Model)............................................................................- 66 - Figure 3.24: Generator, shaft and blade oscillations (Top) and model validation (Bottom) -
67 - Figure 3.25: PMG Regulation plots from machine designers (left) and PMG model (right)-
68 - Figure 3.26: Converter Control Validation Plot.............................................................- 68 - Figure 4.1: International Fault Ride-through Requirements Comparison according to
Ausin, Gevers and Andresen [77] ..........................................................................- 71 - Figure 4.2: FFIG Reversed Converter Control for Fault Ride-through .........................- 74 -

ix
Figure 4.3: FFIG Machine Bridge Fault Ride-through Validation Plot (Site data is shown in blue, modelled predictions in red) .....................................................................- 76 -
Figure 4.4: FFIG Network Bridge Fault Ride-through Validation Plot (Site data is shown in blue, modelled predictions in red) .....................................................................- 77 -
Figure 4.5: PMG Conventional Converter Control for Fault Ride-through...................- 79 - Figure 4.6: PMG Vector Diagram with Pseudo-Field Weakening ................................- 80 - Figure 4.7: PMG Fault Ride-through without a Chopper or Brake Resistor .................- 82 - Figure 4.8: Fault Ride-through of a PMG with Fully Rated Chopper ...........................- 83 - Figure 4.9: Simplified Shaft System ..............................................................................- 85 - Figure 4.10: Composition of a Ramped-Step Function .................................................- 86 - Figure 4.11: Amplitude of shaft oscillations following a ramped reduction in torque ..- 87 - Figure 4.12: Converter Control for a Ramped Chopper ................................................- 87 - Figure 4.13: Fault Ride-through of a PMG with Ramped Chopper...............................- 88 - Figure 4.14: Reduced Order Model Design ...................................................................- 90 - Figure 4.15: Fault Ride-through Simulation Comparison of PMG (Right) and Reduced
Order (Left) Models ...............................................................................................- 91 - Figure 4.16: GB Requirement for Droop Control from National Grid [78] ..................- 93 - Figure 4.17: Implementation of Frequency Response with an Intermittent Resource taken
from National Grid [78] .........................................................................................- 94 - Figure 4.18: Frequency Response Types .......................................................................- 96 - Figure 4.19: Primary Frequency Response by Pitch Control.........................................- 98 - Figure 4.20: Primary Frequency Controller Using Converter Power Reference ...........- 99 - Figure 4.21: Frequency Response Controller for Temporary Over-production ..........- 100 - Figure 4.22: High Frequency Response Comparison under low wind (left) and high wind
(right)....................................................................................................................- 102 - Figure 4.23: Low Frequency Response Comparison under low wind (left) and high wind
(right)....................................................................................................................- 103 - Figure 4.24: High Frequency Response in Variable Wind (available power shown in red,
with output power in blue) ...................................................................................- 104 - Figure 4.25: Low Frequency Response in Variable Wind with GB Requirements
(available power shown in red, with output power in blue).................................- 105 - Figure 4.26: Low Frequency Response in Variable Wind with Delta Requirements
(available power shown in red, with output power in blue).................................- 106 - Figure 4.27: Inertial Control by Frequency Derivative................................................- 109 - Figure 4.28: Inertial Control by Speed Control ...........................................................- 110 - Figure 4.29: Inertial Control by Synthetic Load Angle ...............................................- 112 - Figure 4.30: Inertial response to a high frequency step ...............................................- 114 - Figure 4.31: Inertial response simulation to 27th May 2008 frequency profile (low wind) .. -
115 - Figure 4.32: Expanded view of Figure 4.31.................................................................- 115 - Figure 4.33: Inertial response simulation to 27th May 2008 frequency profile (high wind). -
116 - Figure 5.1: Indicative Range of Power Capacity Costs for Energy Storage Technologies .. -
131 - Figure 5.2: Installed Energy Capacity Costs................................................................- 132 - Figure 5.3: Energy Storage Technologies' Cycle Life and Efficiency.........................- 133 - Figure 5.4: Effective Generation Cost of Storage........................................................- 134 - Figure 5.5: Generation Costs from Parsons Brinckerhoff [125], [126] .......................- 134 - Figure 5.6: The VRFB System.....................................................................................- 136 - Figure 6.1: Summary of VRFB Integration .................................................................- 140 - Figure 6.2: Mathematical Model of VRFB from Blanc [134] .....................................- 142 - Figure 6.3: VRFB Physical Model...............................................................................- 144 -

x
Figure 6.4: VRFB Power Converter Interface .............................................................- 145 - Figure 6.5: VRFB Boost Converter Performance from Gray and Sharman [130].......- 146 - Figure 6.6: Simplified Model of the Boost Converter and IGBT SVC .......................- 147 - Figure 6.7: Integrated VRFB and Wind Farm Single Line Diagram...........................- 148 - Figure 6.8: VRFB Voltage according to Bindner et al. [137] (Top) and Model (Bottom)... -
149 - Figure 6.9: Energy Store System Round Trip Efficiency according to Binder et al. [137]
(Top) and Model (Bottom)...................................................................................- 151 - Figure 6.10: Power Converter Control for VRFB........................................................- 153 - Figure 6.11: Low Voltage Ride-through Controller ....................................................- 155 - Figure 6.12: GFR of Energy Store as a Load...............................................................- 156 - Figure 6.13: GFR of Energy Store as a Generator .......................................................- 157 - Figure 6.14: VRFB Integration with a Wind Farm......................................................- 158 - Figure 6.15: Wind Farm Main Controller with Integrated Storage .............................- 160 - Figure 6.16: Controller for Shared Frequency Response Capability between a Wind Farm
and an Energy Store .............................................................................................- 161 - Figure 6.17: Fast Frequency Response from VRFB ....................................................- 161 - Figure 6.18: High Frequency Response from a Wind Farm and VRFB......................- 162 - Figure 6.19: Generator Control for Low Frequency Response....................................- 163 - Figure 6.20: Load Control for Low Frequency Response............................................- 164 - Figure 6.21: Bipolar Control for Low Frequency Response........................................- 165 - Figure 6.22: Frequency Response and Power Smoothing ...........................................- 166 - Figure 6.23: Integrated Fuzzy Logic Based Wind Farm and Store Controller ............- 167 - Figure 6.24: Degree of Membership of the Input (Top & Centre) and Output (Bottom)
Functions ..............................................................................................................- 168 - Figure 6.25: Integrated Power Smoothing and Frequency Response Control including, top
to bottom, inertial response, droop response, state of charge management, forecasting and wind smoothing .............................................................................................- 170 -
Figure 6.26: Performance of Integrated Wind Farm and VRFB Controller ................- 170 - Figure 7.1: Economic Modelling Methodology...........................................................- 175 - Figure 7.2: Electricity Market Structure according to National Grid [144].................- 176 - Figure 7.3: Horns Rev Wind Speed Data Subset Comparison, histogram of forecast errors
for an hour ahead FPN (the x axis shows the % error in forecast to actual output as a percentage of total wind farm rating)...................................................................- 178 -
Figure 7.4: Wind Speed Scenarios ...............................................................................- 179 - Figure 7.5: Average System Buy and Sell Prices for March 2010 to February 2011..- 183 - Figure 7.6: Mandatory Frequency Response Market Price Evolution over a 3 year period
March 2008-February 2011) ................................................................................- 186 - Figure 7.7: Mandatory Frequency Response Market Price to Holding Volume
Relationship .........................................................................................................- 187 - Figure 7.8: Comparison of Arbitrage and Frequency Response Revenues, the first hour
represents charging in the cheapest half-hour period and discharging into the single peak half hour period, with longer charge/discharge periods shown moving right on the x axis ..............................................................................................................- 189 -
Figure 7.9: Oxera, 2011 discount rates today and 2020 for typical low carbon sources- 191 -
Figure 7.10: Traded Energy Revenues, excluding frequency response, for the different power capacities considered.................................................................................- 192 -
Figure 7.11: Low Case - Incremental Revenue............................................................- 193 - Figure 7.12: Mid Case - Incremental Revenue ............................................................- 194 - Figure 7.13: High Case - Incremental Revenues .........................................................- 194 -

xi
Figure 7.14: Incremental Revenues (Excluding ROCs) in £ for different power and energy rating batteries......................................................................................................- 195 -
Figure 7.15: Comparison of revenues from an independent energy store and a store operating with a wind farm (under the “Mid” scenario) ......................................- 196 -
Figure 7.16: Grid Frequency Distribution for 2008 courtesy of National Grid ...........- 197 - Figure 7.17: Optimal control of wind and energy storage in tandem ..........................- 199 - Figure 7.18: Optimal Charging Rate of an Energy Store with a Wind Farm...............- 200 - Figure 7.19: Potential Annual Arbitrage Revenues - Dependence on Round Trip
Efficiency .............................................................................................................- 201 - Figure 7.20: Net Present Value of VRFB over 20 year life under Low scenario ........- 201 - Figure 7.21: Net Present Value of VRFB over 20 year life under Mid scenario.........- 202 - Figure 7.22: Net Present Value of VRFB over 20 year life under High scenario........- 202 - Figure 7.23: Comparison of VRFB's Benefit to a 300MW Wind Farm (Mid Case) ...- 204 - Figure 7.24: Net Present Value (20 year lifetime) of Different Power and Energy Rating
Stores under Low Economic Case .......................................................................- 205 - Figure 7.25: Net Present Value (20 year lifetime) of Different Power and Energy Rating
Stores under Mid Economic Case ........................................................................- 206 - Figure 7.26: Net Present Value (20 year lifetime) of Different Power and Energy Rating
Stores under High Economic Case.......................................................................- 206 - Figure 7.27: NPV Comparison of the Different Storage Integration Options (75MW, 3
hour store over 20 years)......................................................................................- 207 - Figure 7.28: Plot of hourly electricity demand to percentage served by wind from Sinden
[163] (red elements are superimposed and show the curtailment of energy if wind were curtailed at 50% of demand and 33GW were installed on the GB system, rather than Sinden’s 25GW)...........................................................................................- 209 -
Figure 7.29: Frequency Response Instructions Distribution from Pearmine [164] .....- 210 - Figure 7.30: NOx and CO Emissions from CCGT Plant According to Tauschitz and
Hochfellner [165] .................................................................................................- 211 - Figure 7.31: Part Load Efficiency of CCGT Plant According to Tauschitz and Hochfellner
[165] .....................................................................................................................- 211 - Figure 9.1: Ziggurat Algorithm Implementation .........................................................- 224 -
List of Tables Table 3.1: Comparison of Geared and Direct-drive Shaft Parameters (Approximate to
protect commercial sensitivity) ..............................................................................- 42 - Table 3.2: Matlab-Simulink Wind Turbine Models Developed ....................................- 63 - Table 5.1: Advantages and Disadvantages of Pumped Hydroelectric Storage............- 121 - Table 5.2: Advantages and Disadvantages of CAES...................................................- 122 - Table 5.3: Advantages and Disadvantages of Lead Acid Batteries .............................- 123 - Table 5.4: Advantages and Disadvantages of Nickel Cadmium Batteries...................- 123 - Table 5.5: Advantages and Disadvantages of Sodium Sulphur Batteries....................- 124 - Table 5.6: Advantages and Disadvantages of Sodium Metal Halide Batteries............- 124 - Table 5.7: Advantages and Disadvantages of Lithium Ion Batteries...........................- 125 - Table 5.8: Advantages and Disadvantages of Metal Air Batteries ..............................- 125 - Table 5.9: Advantages of Redox Flow Batteries compared to conventional batteries - 126 - Table 5.10: Advantages and Disadvantages of the Bromine Polysulphide Redox Flow
Battery..................................................................................................................- 126 - Table 5.11: Advantages and Disadvantages of the Zinc-Bromine Redox Flow Battery- 127
- Table 5.12: Advantages and Disadvantages of Vanadium Redox Flow Batteries.......- 127 - Table 5.13: Advantages and Disadvantages of Thermal Storage Systems ..................- 128 - Table 5.14: Advantages and Disadvantages of Flywheels..........................................- 129 -

xii
Table 5.15: Advantages and Disadvantages of Supercapacitors..................................- 129 - Table 5.16: Advantages and Disadvantages of SMES.................................................- 130 - Table 5.17: Advantages and Disadvantages of Hydrogen ...........................................- 130 - Table 5.18: VRFB Performance Metrics (* with membrane replacement at 10 years) . - 137
- Table 6.1: Integrated Fuzzy Logic Controller..............................................................- 168 - Table 7.1: Energy Store Power and Energy Ratings....................................................- 180 - Table 7.2: Economic Scenarios....................................................................................- 187 - Table 7.3: Cost Scenarios for the VRFB......................................................................- 190 - Table 7.4: VRFB Deployment Payback Periods (x = Not paid back within 20 years) - 203 - Table 7.5: Integrated Energy Store NPV Sensitivity to Discount Rate .......................- 208 - Table 7.6: Independent Energy Store NPV Sensitivity to Discount Rate....................- 208 - Table 7.7: Optimal Energy Store and Wind Farm NPV Sensitivity to Discount Rate - 208 - Table 7.8: Carbon Intensity of Electricity Generation in the UK ................................- 212 - Table 9.1: Pumped Hydroelectric Characteristics........................................................- 225 - Table 9.2: Compressed Air Energy Storage Characteristics........................................- 226 - Table 9.3: Lead Acid Battery Characteristics ..............................................................- 226 - Table 9.4: Nickel Cadmium Battery Characteristics....................................................- 227 - Table 9.5: Sodium Sulphur Battery Characteristics.....................................................- 227 - Table 9.6: Sodium Nickel Chloride (Zebra) Battery Characteristics...........................- 227 - Table 9.7: Lithium Ion Battery Characteristics............................................................- 228 - Table 9.8: Metal Air Battery Characteristics ...............................................................- 228 - Table 9.9: Vanadium Redox Flow Battery Characteristics..........................................- 229 - Table 9.10: Zinc Bromine Flow Battery Characteristics .............................................- 229 - Table 9.11: Polysulphide Bromine Flow Battery Characteristics................................- 230 - Table 9.12: Superconducting Magnetic Energy Store Characteristics.........................- 230 - Table 9.13: Supercapacitor Characteristics..................................................................- 230 - Table 9.14: Flywheel Characteristics...........................................................................- 231 - Table 9.15: Thermal Energy Store Characteristics ......................................................- 231 -

xiii
List of Abbreviations
AC Alternating Current AVR Automatic Voltage Regulator AFE Active Front End CAES Compressed Air Energy Storage CCGT Combined Cycle Gas Turbine CCL Capped Committed Level CIGRE International Council on Large Electric Systems Cp Coefficient of Performance d-axis Direct axis DBERR Department of Business, Enterprise and Regulatory Reform DBR Dynamic Brake Resistor DC Direct Current DCF Discounted Cash Flow DECC Department of Energy and Climate Change DFIG Doubly Fed Induction Generator DTI Department for Trade and Industry EMF Electro-motive Force EngD Engineering Doctorate ENTSO-E European Network of Transmission System Operators for Electricity EPRI Electric Power Research Institute ESA Electricity Storage Association FFIG Fully Fed Induction Generator FFPMG Fully Fed Permanent Magnet Generator FFSG Fully Fed Synchronous Generator FPN Final Physical Notification FSIG Fixed Speed Induction Generator FSM Frequency Sensitive Mode GFR Grid Fault Ride-through GWEC Global Wind Energy Council HVAC Heating, Ventilation and Air Conditioning HV High Voltage HVDC High Voltage Direct Current IGBT Insulated Gate Bipolar Transistor KE Kinetic Energy LFSM Limited Frequency Sensitive Mode LV Low Voltage MEL Maximum Export Limit MV Medium Voltage NPV Net Present Value OFTO Offshore Transmission Owner 3p Three times the blade rotational frequency PI Proportional-Integral PLL Phase Locked Loop PMG Permanent Magnet Generator pu Per Unit PWM Pulse Width Modulation q-axis Quadrature axis ROC Renewable Obligation Certificate ROCOF Rate Of Change Of Frequency

xiv
RPM Revolutions Per Minute SMES Superconducting Magnetic Energy Storage SBP System Buy Price SoC State of Charge SSP System Sell Price STOR Short Term Operational Reserve SVC Static VAR Compensator TSO Transmission System Operator TSR Tip Speed Ratio UPS Uninterruptible Power Supply VRFB Vanadium Redox Flow Battery VRIG Variable Resistance Induction Generator

xv
Mathematical Notation
General Notation Conventions
X Scalar Quantity, X X Vector, X
X Peak value of X
X~
Root mean square (RMS) value of X
∠X Y Angle between vectors X and Y
|X| Magnitude of the vector X X Per unit value of X Xd d-axis component of X Xq q-axis component of X Xm, Xmag Magnetising branch value of X
Xr Rotor side value of X
Xs Stator side value of X
Xt Total air-gap value of X
Xw Wind side value of X Xgrid Grid side value of X
Xgen Generator side value of X
XDC DC link side value of X
Xref Set-point value of the controlled variable, X
YX ⋅ Multiplication of X and Y YX • Dot product of X and Y
YX × Cross product of X and Y
Specific Notation Used β Blade Pitch Angle (º) δ Generator Load Angle (º) Φ cos Φ is the power factor η Efficiency in % ρ Air density in kg/m3
λ Tip speed ratio of the wind turbine blades θ Angle (rad) Ψ Magnetic flux linkage (Vs) π, Π Revenue is £ ω Rotational frequency in rad/s A Swept area of the blades in m2 B Magnetic Field in Wb Cdc DC link capacitance in F Cp Coefficient of performance D Mechanical damping component in Nms/Rad E Electromotive force in V E
o Electrochemical Potential in V f Frequency in Hz H Per unitised moment of inertia in s I,i General Current in A Ichop Chopper current in A J Moment of inertia in kgm2
KE Kinetic Energy in J Kshaft Shaft Stiffness in Nm/rad

xvi
Kp Proportional Gain Ki Integral Gain L Inductance in H m Mass of Air in kg ngear Gearbox ratio ncycles Life time of energy store in cycles N Number of turns p Pole pairs P Power in W R Resistance in Ω Rb Blade radius in m Rdbr Dynamic Brake Resistor in Ω S Apparent Power in VA s Induction Generator slip t Time in s T, Tq Torque in Nm U Terminal Voltage in V vmean Average effective wind speed in m/s vw Instantaneous effective wind speed in m/s V General Voltage in V X General Reactance in Ω

xvii
Executive Summary
Introduction Widespread offshore wind power development is fundamental to meeting the UK’s share
of the European target of generating 20% of all energy renewably by 2020. Large offshore
wind farms will be connected to the transmission system and will displace conventional
generation at times of high output. Concurrent with this development will be the
replacement of the UK’s nuclear fleet, potentially with fewer, larger individual generators.
Historically sudden loss of a major generator, such as a nuclear station trip, has been
covered by frequency response reserve, held as a contingency, on large, mainly fossil
fuelled, power stations. However, the displacement of traditional generation by wind
power challenges this model.
Challenges for Wind Power and the Power System
Conventional synchronous generators provide an inherent reactive power in-feed to
system voltage disturbances such as grid fault events, helping to trigger protection devices
and secure system voltages. Modern wind turbines connect to the grid through voltage
source power electronic converters. Power electronic converters permit the use of new
machine topologies such as the direct-drive permanent magnet generator, which in turn
simplifies the wind turbine design for the offshore environment. The control of these
converters has extended to providing a reactive current in-feed to low grid voltages from
full converter wind turbines, with this in-feed limited to the current rating of the power
converter. These voltage events, characterised by real power output reduction within a
mains cycle, can however, cause significant electrical and mechanical transients. These
transients present a particular challenge to direct-drive permanent magnet generator wind
turbines owing to a relatively high shaft mechanical resonant frequency and the fact that
the rotor field can not be weakened if the generator exceeds its nominal speed, leading to a
tendancy for over-voltage.
One of the main benefits of a power converter is that it controls the turbine to operate at
variable speed, maximising energy yield. But this inherently also decouples the rotating
inertia of the blades and generator from the grid. Conventional generators’ rotational
inertia acts as an energy buffer to the grid, ensuring that supply and demand imbalances
do not lead to large frequency changes on the power system. Removing inertia from the
system at a time when larger single nuclear generators are proposed therefore threatens to
lead to decreased frequency stability.

xviii
The power converter also adds flexibility and controllability to the wind turbines, which
allows them to meet increasingly advanced Grid Codes. Given the potential impact of
rising levels of wind power on the GB system, it is of increasing interest to establish
whether the control of the wind turbine and power converter can be modified to support
the system frequency.
Energy Storage to Complement Wind Power
The challenges presented by wind power’s intermittency and optimal output tracking may
well find their natural solution in advanced energy storage technologies. Energy storage
offers the prospect of allowing wind to be dispatchable as well as being capable of holding
reserves for securing the power system’s frequency. However, whilst the intuitive link
between energy storage and wind power is obvious, the technical integration is more
complex. Control of the energy store has to consider intermittent charging in the context
of finite energy capacity and provision of frequency response may still have to account for
the variable power capacity of the energy store required for wind smoothing. Furthermore,
adding equipment and complexity to the wind farm would increase cost, so a return is
necessary.
The challenge with energy storage is to identify the right technology to operate in tandem
with a wind farm and establish whether it can be integrated into the power system in a
manner that is economically viable. Frequency response offers a high value application for
technology with a fast dynamic response, whilst energy time-shifting offers further benefit
to technologies with high energy capacities at low cost, but can the two be integrated?
Aims and Objectives
The current trend in GB Grid Code development is to mandate technical capabilities, in
line with the inherent behaviour of conventional synchronous plant, regardless of
technology, and ensure compliance through type-testing and commissioning. This places a
burden of technical requirements on all new technologies connecting to the grid, including
wind power. Research into grid connection of renewable generators generally focuses
exclusively on the development of control algorithms and techniques to provide a
particular service to the power system. This research aims to distinguish itself in the
following ways:
• Addressing the implications of Grid Code requirements on direct-drive permanent
magnet generator based power trains and highlighting how the Grid Code
requirements influence the design of the physical system.

xix
• Extending the techniques used in wind turbines to emulate a synchronous
machine’s fast frequency response by considering the controllability of the power
converter.
• Investigating the technical and economic status of different emerging and
traditional energy storage technologies in order to assess the best technology to
complement wind power.
• Developing control techniques for aggregating benefits of energy storage and wind
power, whilst ensuring that the combined system can meet the Grid Code
frequency response requirement in the place of the wind farm alone.
• Assessing the economic viability of providing frequency response services and
determining whether an integrated energy storage system would offer a genuine
benefit over a stand alone wind farm.
Contributions to Knowledge
The research has developed four main key findings supported by a number of subsidiary
results.
Grid Fault Ride-through of Permanent Magnet Generator based Wind Turbines
Direct-drive Permanent Magnet Generators (PMGs) are typically characterised by:
• Stiff shaft systems with higher resonant frequencies than conventional wind
turbines.
• Intrinsically linked speed and open-circuit voltage owing to the fixed rotor flux
provided by the magnets.
• High stator reactance to protect the magnets under short circuit conditions.
These three factors contribute to the conclusion that it is essential for direct-drive PMG’s
power converters to be equipped with choppers and brake resistors in order to ride-
through low voltage grid events. Under grid faults these absorb the stator magnetic energy
as well as prevent excitation of the shaft and acceleration of the generator. However, as a
patented alternative to using a fully rated chopper to ride-through the complete grid fault,
this work presents a novel technique of controlling the power converter to minimise
chopper use. The energy capacity of this chopper and brake resistor can be significantly
reduced by controlling the generator’s maximum torque ramp rates to match the resonant
period of the shaft system. This minimises mechanical excitation and avoids converter DC
link over-voltage.

xx
Fast Frequency Response from Wind Turbines
Research on synthetic inertial response from wind turbines has focussed mainly on
methods that rely on a measurement of the derivative of system frequency. System
frequency is a noisy signal and taking the derivative either increases noise, thereby
reducing controller robustness, or else requires filtering, thereby increasing controller
delay. Integration of synthetic inertia with the power converter control capability has
allowed two alternative methods of inertial provision to be identified. Either the
magnitude of the frequency deviation can be used to modify the speed set point of the
turbine through a speed control loop, which offers tuneable inertial response. Or
alternatively, the integral of the frequency error can be used to derive an angle analogous
to a synchronous machine’s load angle change. This offers fast, noise insensitive response
in line with a conventional generator. However, the work also confirms that fast inertial
and primary response from wind turbines in low wind conditions inevitably leads to
mechanical speed changes, which in turn lead to periods of reduced power output as the
turbine recovers. This recovery period threatens to limit the true usefulness of wind farms’
inertial and frequency response capability.
Energy Storage for Wind Power
An appraisal of the status of energy storage technologies shows that, for the specific
requirements of frequency response provision with intermittent wind power, the
Vanadium Redox Flow Battery is an attractive option. This conclusion is helped by the
flow battery’s long cycle life, fast response and cheap energy capacity. Such an energy
storage system could be readily integrated with power converter based reactive power
compensation equipment for AC connected wind farms. A novel incremental
improvement is made to the control of a flow battery connected to the grid through a boost
converter and IGBT SVC. This adaptation allows the battery to support the power
converter’s DC link voltage through extreme low voltage events so that a continuous
reactive current output can be maintained.
Application of energy storage with wind power for frequency response under current GB
regulations requires that the store first smoothes the wind output. This means that the
control of the energy store must manage the battery’s state of charge as well as provide
frequency response capability and energy time shifting. An innovative fuzzy logic
controller has been developed to manage the state of charge of the battery, whilst the
reference state of charge level can be scheduled to manage energy time-shifting thereby
presenting aggregation of multiple benefits alongside frequency response.

xxi
Economics of Frequency Response
The GB Grid Code mandates core technical requirements on plant, but it is the prices set
in the separate frequency response market that ultimately determines whether that
capability is used. The increasing requirement for primary and secondary frequency
response is likely to lead to increased prices for frequency response services by 2020.
Integration of energy storage with a wind farm for frequency response is disadvantaged by
the Grid Code requirement to regulate relative to a fixed output. Revenues from increased
output firmness do not compensate for the reduced capacity available for frequency
response. Nevertheless, sharing high frequency response capacity with the wind farm,
whilst the store is charging, permits the energy store to offer greater frequency response
capacity and thereby increases revenues. The frequency response revenues are the
dominant source of income as round trip energy losses in the flow battery offset arbitrage
gains. If the energy store offers frequency response services, with the wind farm only
offering high frequency balance control, the revenues can be maximised by a method that
is the subject of a patent application.
Discounted Cash Flow analysis shows that present prices are insufficient to lead to a
positive present value from an energy store; however, likely price trends suggest this will
change before 2020. Even with positive present value, the payback periods are unlikely to
be short enough to represent an attractive investment. Nevertheless, only a small subsidy
would be needed to change this and the Electricity Market Reform may deliver this
through a potential capacity mechanism.
Publications
Conference Papers
1. D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Grid Connection
Oriented Modelling of Wind Turbines with Full Converters.” In Proc. 44th
Universities Power Eng. Conf. (UPEC), Glasgow, UK, 1-4 Sept. 2009.
The associated presentation won the ‘Best Presentation’ award at the conference.
2. D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Grid Connection
Oriented Modelling for Simulation of Frequency Response and Inertial Behaviour
of Full Converter Wind Turbines.” In Proc. 8th Int. Workshop on Large Scale
Integration of Wind Power into Power Syst., Bremen, Germany, Oct. 2009.

xxii
3. D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Grid Connection
Oriented Modelling of Wind Farms to Support Power Grid Stability.” In Proc. the
21st Int. Conf. on Syst. Eng. (ICSE), Coventry, UK, Sept. 2009.
4. D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Towards Large-
scale Direct Drive Wind Turbines with Permanent Magnet Generators and Full
Converters.” In. Proc. IEEE Power and Energy Soc. General Meeting,
Minneapolis, USA, July 2010, doi: 10.1109/PES.2010.5589780.
5. D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Investigating the
Limits to Inertial Emulation with a Large-scale Wind Turbines with Direct-Drive
Permanent Magnet Generators.” In Proc. UKACC Control 2010 Conference,
Coventry, UK, Sept. 2010.
6. D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Investigating the
Potential Contribution of Future Offshore Wind Turbines to Frequency Stability
During Major System Disturbances.” In Proc. IET ACDC 2010 Conf., London,
UK, 19-22 Oct. 2010, doi: 10.1049/cp.2010.1004.
7. D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Frequency Control
Using Vanadium Redox Flow Batteries on Wind Farms.” In Proc. IEEE Power
and Energy Soc. General Meeting, Detroit, USA, 24-29 July 2011, doi:
10.1109/PES.2011.6039520.
Patent Applications
1. D. D. Banham-Hall, C. A. Smith, G. A. Taylor. Generator torque control methods.
European Patent Application no. EP10006961.1 filed 06/07/2010.
2. D. D. Banham-Hall, C. A. Smith, G. A. Taylor. Frequency reserves from an
Energy store and a generator. European Patent Application no. EP10007692.4 filed
26/09/2011.
Journal Articles
1. D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Meeting Modern
Grid Codes With Large Direct-Drive Permanent Magnet Generator Based Wind
Turbines – Low Voltage Ride-through.” Accepted for publication in Wind Energy.
2. D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Meeting Modern
Grid Codes With Large Direct-Drive Permanent Magnet Generator Based Wind

xxiii
Turbines – Frequency and Inertial Response.” Submitted and under revision for
publication in Wind Energy.
3. D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Flow Batteries for
Enhancing Wind Power Integration.” Accepted for publication in IEEE
Transactions on Power Systems.

- 1 -
1 Introduction
1.1 Overview
This section is intended to act as an introduction and a reader’s guide to the thesis. The
widespread deployment of wind power on the GB transmission system together with the
technological advance of energy storage are highlighted as the motivation behind
investigating future active power control from large offshore wind farms. The key
research objectives and findings are introduced.
1.2 Wind Power development in the UK
The UK government [1] has enacted a legally binding commitment to reduce Carbon
Dioxide and associated greenhouse gas emissions by 80% by 2050, relative to 1990 levels.
To achieve this, it is likely that emissions will have to be cut by 34% by 2020. In order to
achieve these goals the electricity sector, which accounts for a third of emissions and is
the largest single source, must see rapid and extensive decarbonisation. Indeed the
Department of Energy and Climate Change’s (DECC) [2] own roadmap foresees a central
scenario where over 30GW of wind power is added to the GB power system by 2020.
Furthermore, offshore wind power alone is projected to exceed 40GW from 2030. This
trajectory is reinforced by National Grid’s [3] projections for the transmission level
connected generating capacity on the power system in 2020, given the right incentives, as
shown in Figure 1.1.
2010/11 GW, Percentage
28.2, 33%
0, 0%
10.8, 13%
31.9, 38%
3.4, 4%
2.7, 3%
3.8, 4%
3.3, 4%
1.1, 1% 0, 0%
0, 0%
Coal
Coal (CCS)
Nuclear
Gas
Oil
Pumped Storage
Wind
Interconnectors
Hydro
Biomass
Marine
2020/2021 GW, Percentage
14.5, 14%
0.6, 1%
11.2, 11%
34.7, 34%
0, 0%
2.7, 3%
26.8, 27%
5.8, 6%
1.1, 1%
1.6, 2%
1.4, 1%
Figure 1.1: National Grid's 'Gone Green' capacity projections for 2020/2021 (right) compared to
2010/11 (left)
The large scale development of wind, which is inherently an intermittent resource, will
have a significant impact on the operation of the power system. Balancing supply and
demand in real time will become increasingly challenging due to wind’s intermittency.

- 2 -
Furthermore, power electronic interfaced wind turbines with low inherent inertia will
replace conventional high inertia rotating generators, thereby removing a stabiliser from
the grid system. Additionally, large offshore wind farms and nuclear power stations will
present a larger potential single loss of generation than the current largest in-feed loss on
the system (Sizewell B, 1200MW approx.). These factors combined lead to an increased
requirement for reserves and response on the power system, with National Grid’s [3]
estimates shown in Figure 1.2.
Figure 1.2: National Grid's [3] Projections for Reserve Requirements
Figure 1.2 clearly illustrates that the requirements for many types of response and reserve
are likely to grow significantly over the current decade. Large offshore wind farms are
likely to be the dominant source of new transmission connected wind generation. Active
power control from large offshore wind farms will therefore be increasingly important, but
can wind contribute to securing the power system as well as supply clean energy.
1.3 An opportunity for energy storage?
The challenges of integrating high levels of wind energy into the GB power system may
represent a significant opportunity for energy storage. Storage’s flexibility to operate as
dynamic generation or demand could help to alleviate the power swings associated with
intermittent wind power. Furthermore, advanced battery technologies can offer fast
response to the power system to meet the requirements for increased response. The
Energy Research Partnership [4] has shown how the diverse range of developing energy
storage technologies can meet many of the challenges posed by a grid served by
renewable power in 2020, this is shown in Figure 1.3.

- 3 -
Figure 1.3: Energy Research Partnership's [4] assessment of the scale of challenges facing the power
system and the solutions that energy storage systems offer
Conventional energy storage, in the form of pumped hydroelectric power, has supported
the power system for decades. Today, the scale of the challenges facing the power system,
combined with the advance of energy storage technologies, suggests it may be time for
new technologies to emerge to assist with active power control from large offshore wind
farms.
1.4 Research objectives
Planning for the security of the GB power system in 2020 must incorporate a considered
assessment of the behaviour of widespread, intermittent wind power. To address this, the
general research area considers the differences between conventional generators and
modern wind turbines, particularly in view of the turbines’ power electronic interface to
the grid and then develops control methods for wind plant to emulate the behaviour of the
conventional plant. This research specifically addresses modern wind turbines equipped
with full rating converters and either induction or permanent magnet generators. It aims to
assess their capability to control active power in response to transient changes on the
power grid, investigating both low voltage events and frequency changes. This contributes
to the technical capability of modern wind farms to provide for the increasing reserve

- 4 -
services required by the grid. Can wind power provide reserves and response to help
secure the power system in 2020?
Historically, different generation technologies have always offered different dynamic
performance capabilities and varying capacity factors. However, today’s approach to
provision of dynamic response is based on requiring mandatory basic performance
through compliance with Grid Code technical requirements. Whilst it is important to
understand the technical capabilities of wind plant to meet these requirements and offer
ancillary services, it is worth considering whether this capability may become redundant
in the face of energy storage technologies that are advancing both economically and
technically. The research therefore also aims to investigate the integration of energy
storage with wind power to offer reserve services to the power system in terms of both
their potential control schemes and their financial viability. Does energy storage provide a
better means of offering frequency response services than relying on spilling wind and
limiting a free, but intermittent resource?
1.5 Contributions to knowledge
The trend in wind turbine design, particularly for offshore, is leading to ever larger
machines and designs which simplify the drive train through use of multi-pole permanent
magnet generators. Such machines offer lower maintenance and potentially higher
efficiency; however, the permanent magnets mean that the rotor flux is fixed. The lack of
control over rotor flux leads to potential over-voltage in the event of turbine over speed or
loss of load under a grid fault. In chapter 4 and Banham-Hall et al. [80] a modification to
the control technique of the power converter is proposed to address low voltage ride-
through with permanent magnet generator based wind turbines. This control forces a
ramped reduction of generator torque at a rate determined by the fundamental frequency
of the mechanical shaft system. The energy from the generator is diverted to a brake
resistor on the power converter’s DC link; however, this resistor need not be rated for the
full turbine energy for the duration of the fault. Furthermore, the appropriate torque ramp
rate ensures that mechanical oscillations of the wind turbine shaft are avoided, thereby
minimising the transient over-voltages from the permanent magnet generator that could
result from grid faults.
The trend to ever larger turbines with permanent magnet generators is also part of a move
towards power electronic converter interfaced wind farms, whether they are turbine level
converters or DC connected wind farms. This implicitly implies a decoupling of the
physical rotating inertia from the power output of the wind farm. Conventional approaches

- 5 -
to imposing inertial response from converter interfaced wind plant rely on taking a
measurement of the derivative of power system frequency. This inherently introduces
noise or delay to the response as the initial frequency measurements are noisy and
therefore either the increased noise of the derivative must be tolerated or a low pass filter
must be applied, thereby slowing down the response. Chapter 4 and Banham-Hall et al.
[87] propose methods that allow a wind turbine to offer inertial response without relying
on taking the frequency’s derivative; these offer a means to fast response more akin to a
conventional generator.
Whilst the thesis demonstrates key methods of providing frequency response from a stand
alone wind farm, it moves on to develop novel methods of providing this service from a
wind farm equipped with a Vanadium Redox Flow Battery. Chapter 6 begins by
developing a simplified model of a Vanadium Redox Flow Battery and power converter
for interface to the grid. Chapter 6 and Banham-Hall et al. [138] then explore the control
methods that can be used to regulate the battery’s state of charge, whilst also offering
reserve for frequency response and smoothing of the wind farm’s output power. These
control methods depend on a novel fuzzy logic controller, which manages the energy store
and wind farm’s power output and also allows the energy store to offer some daily price
arbitrage. The flow battery is shown to be technically capable of being integrated with a
wind farm to offer combined frequency response services.
Ultimately, the provision of frequency response reserves on the GB power system depends
on selection in the market. Whilst stand alone wind farms and those potentially equipped
with energy storage could offer these services to the grid, either solution would have to
compete with conventional plant. Chapter 7 therefore analyses the economics surrounding
the deployment of energy storage on the power system for frequency response. It
highlights the importance of using wind’s capability to provide high frequency response in
conjunction with energy storage’s capability to provide low frequency response and daily
arbitrage. Whilst it ultimately finds that the economic case alone is not sufficient to justify
Vanadium Redox Flow Batteries, it concludes by illustrating that storage would offer
environmental benefits and argues in favour of a subsidy, which could see this application
become an economically viable application for energy storage.
1.6 EngD Scheme
Brunel and Surrey Universities have offered an “Environmental Technology” Engineering
Doctorate since near the inception of the scheme in 1993. The Engineering Doctorate
(EngD) scheme itself is a four year research degree where the researcher is based in

- 6 -
industry in order to tackle industrially relevant research problems. The EngD is supported
by a series of professional development modules covering a range of environmental and
technology matters.
It is expected that an EngD should be of at least the same quality as the traditional PhD
and commensurate with 4 years of study. Nevertheless, the EngD differs from a PhD both
in its industrial location and its focus on innovation as opposed to scientific discovery. As
such an EngD may be developed as a portfolio, where it is the synthesis of the portfolio
itself that presents the key contribution to knowledge. In this vein, whilst this thesis
presents specific new control methods for both wind turbines and energy storage systems;
these alone do not define the contribution of the EngD. Over-arching these specific
contributions this thesis aims to question whether securing the power system, particularly
system frequency, with ever more onerous requirements on wind turbines, is necessarily
desirable.
This EngD has been sponsored by GE Energy’s Power Conversion business and located
within the Modelling and Simulation team of the Central Engineering department. In
addition to the sponsorship from GE Energy’s Power Conversion business, National Grid
has provided regular input to the project by attending and hosting some project progress
meetings.
It should be noted that GE Energy bought Converteam, the original sponsors of this work,
in 2011 and Converteam became GE Energy’s Power Conversion business. Converteam
were a supplier of power conversion equipment to a wide range of wind turbine
manufacturers including Siemens Wind Power. However, GE Wind historically internally
supplied their own power converters. When this thesis refers to GE Energy’s technology,
it is referring to the technology derived from Converteam and associated with multiple
wind turbine manufacturers and not that of GE Wind.
1.7 Thesis overview
Chapter 1: Introduction
This section begins by providing the foundational knowledge regarding active power
control on the GB transmission system and from offshore wind farms. The section aims to
provide a readers guide to the thesis, highlighting the research approach, the key
contributions to knowledge and the over-arching structure of the thesis as a whole. It also
sets the project within the field of Environment Technology.

- 7 -
Chapter 2: Wind Power and the GB Grid
Chapter 2 forms a technical introduction to the changes in power generation
characteristics on the GB transmission system. After reviewing the exponential growth in
the wind industry globally, it shows that the UK is likely to lead globally in the
development of offshore wind resources. Alongside the industry’s growth has come
technology development that will mean that the GB system faces a rapidly increasing
share of generation that is connected via a power converter. This power converter
interface is highlighted as providing both flexibility and a significant change from
conventional synchronous plant.
Chapter 3: Modelling of Full Converter Wind Turbines
The principle research method applied within this thesis is modelling and simulation. This
chapter reviews the existing literature covering modelling of wind turbines and develops
individual modules to represent the key aerodynamic, mechanical, electrical and control
systems. The chapter includes a comprehensive comparison of the two alternative power
converter control strategies for use with a full converter wind turbine as well as an
introduction to simplified representation of the wind turbine and wind farm controllers for
use in power system simulations. The two software packages used for dynamic simulation
throughout this research project are introduced. Finally, key sub-system models are
validated, as independent modules, against real world data and test bench data, which in
turn permitted the development of a suite of different full converter wind turbine models.
Chapter 4: Grid Connection of Full Converter Wind Turbines
Grid Codes place an increasing technical burden on wind turbines; this section reviews
three areas of present and future compliance: Grid fault ride-through, frequency response
and inertial response. It reviews the existing and developing codes, defines control
schemes to meet their requirements and presents validation results for a full wind turbine
model against a grid fault. The particular challenges of riding-through grid faults with a
permanent magnet generator and full converter are introduced leading to the development
of a novel control scheme that meets this requirement whilst only using a minimally rated
chopper to avoid fundamental drive-train oscillations. The existing requirement to provide
frequency response is reviewed and further control is developed for application with a
control strategy from a wind turbine manufacturer proposing an alternative turbine control
methodology. Finally, against a background of regulatory uncertainty, innovative control
methods are presented for providing fast acting inertial response, whilst minimising

- 8 -
sensitivity to frequency noise. Whilst the chapter shows the technical capabilities of wind,
it is against a backdrop of uncertain reserves from a fickle resource.
Chapter 5: Energy Storage Development
This chapter acts as a bridge between the work on wind turbines and that on energy
storage. It shows that at a time when regulations are mandating wind farms have the
capability to provide frequency response, increasing numbers of energy storage
manufacturers are taking an interest in the economic viability of meeting this requirement
from storage technology. Furthermore, the chapter highlights the complementary nature of
wind and storage for smoothing power output and shifting power generation to times of
high demand. As such there appears to be a potential market for storage if only suitable
aggregation of energy storage’s benefits can be realised. The chapter therefore critically
reviews the technical and economic status of electrical energy storage systems for this
application and concludes that the Vanadium Redox Flow Battery offers great potential.
Chapter 6: Modelling of Vanadium Redox Flow Batteries
In many ways this chapter parallels chapters 3 and 4, but for an energy store, beginning by
building up a model of the Vanadium Redox Flow Battery, validating it and then
developing control methodologies for meeting the rigours of Grid Codes. The developed
model of the flow battery is innovative for both its simplicity and its accurate
representation of output voltage and energy efficiency. This flow battery model is
integrated with the grid via a power converter for which a novel adaption allows the grid
fault ride-through control to enhance the operation of the power converter at low voltage.
Finally, a new integrated controller is developed that manages the battery’s state of charge
whilst also aggregating several different benefits of the storage technology in conjunction
with the capabilities of an offshore wind farm.
Chapter 7: Frequency Response from Wind in 2020
The first half of the thesis advanced control methods for frequency response from wind
power, demonstrating the technical capabilities of power converter interfaced plant.
However, it also identified the challenge of providing reliable frequency response from an
intermittent resource. Therefore, chapters 5 and 6 introduced the advances in energy
storage technologies and the potential of the Vanadium Redox Flow Battery, in particular,
to complement wind power. Ultimately, the direction the power system takes will be
dictated by the economic merit of the different solutions. This chapter investigates the
frequency response market, attempting to establish a value for this service, and then

- 9 -
conducts a scenario analysis to investigate the economics of wind power and storage
acting in tandem. It is a chapter that applies the models developed in chapters 3, 4 and 6
with real wind data to assess the frequency response market. It also introduces a concept
of operation for holding frequency response on a wind farm and an energy store that
optimises their combined operation.
Chapter 8: Conclusions and Further Work
This chapter summarises the contribution of the thesis in the context of the transmission
system, equipment manufacturers and academia. It restates the key contributions to
knowledge and demonstrates how they contribute to the thesis as a whole. As with any
research project, this thesis has raised many more areas that are worthy of further research
and these are addressed here.

- 10 -
2 Wind Power and the GB Grid
2.1 Introduction
This chapter will demonstrate that the development of large scale wind power is likely to
run contrary to the historic development practises of the Great Britain transmission
system. Furthermore, the technology behind wind turbines and wind farms is advancing
rapidly. This chapter introduces the technological challenges that arise when emulating
synchronous machines’ fault and frequency response behaviour.
Section 2.4 follows the trends in electrical systems at both the wind farm and wind turbine
level. It highlights the increasing use of power converter technology, at both the
transmission scale and the wind turbine scale, to meet the challenges of optimising wind
farm yield and meeting modern grid codes.
Section 2.5 introduces, mathematically, the behaviour of the conventional synchronous
machine under both voltage and frequency disturbances. This section highlights how the
inherent fault and inertial behaviour of such generators, which currently provide the
mainstay of the UK's power industry today, acts as an automatic stabiliser to the grid.
The grid of 2020 is likely to include many new offshore wind farms and section 2.6
introduces two consequential challenges. First the challenge to the UK’s offshore wind
farms to provide the same service as synchronous generators whilst presenting a power
electronic interface to the grid. Second the challenge to the grid of providing the same
security of supply with changing generation characteristics.
2.2 The Growth of the Wind Power Industry
Mankind has been harnessing natural power, to do work, for centuries, with the first
conclusive evidence of windmills attributable to Persia in the 10th century. Carlin, Laxson
and Muljadi [5] assert that electricity generation from the wind has been developing since
at least 1888, when the ‘Brush Wind Turbine’ in Cleveland, U.S. produced up to 12kW
peak power output. However, they also show that the grid connection of wind farms was
not an option until the 1970’s.
The oil price shock of the 1970’s combined with air pollution and other environmental
concerns, led to a surge of development of Wind Turbines in the 1980s. By the late 1980s
machines such as NASA’s MOD-5 had peak power generation ratings of over 1MW.
Growing machine ratings led to economies of scale and a gradual decrease in the cost of
wind power.

- 11 -
The improving economics of wind power combined with the increasing cost of fossil fuels
has driven market growth for nearly two decades. Figure 2.1 and Figure 2.2 have been
compiled from the Global Wind Energy Council’s (GWEC) [6] annual statistics digests.
Figure 2.1 shows that there was exponential growth in annual installations until 2010,
when installations fell slightly. Whether 2010 comes to be seen as a blip, as a result of the
global financial crisis, or supply chain issues; or else the end of wind power’s accelerating
growth remains to be seen. However, over this period, the development of wind has seen
it become a mainstream energy source.
0
50000
100000
150000
200000
250000
1996
1997
1998
1999
2000
2001
2002
2003
2004
2005
2006
2007
2008
2009
2010
Year
Tota
l In
sta
lled C
apacity
(MW
)
0
5000
10000
15000
20000
25000
30000
35000
40000
Annual In
sta
llation (
MW
)
Global Installed Capacity(GW)
Annual Installed Capacity(GW)
Figure 2.1: Global Installed Wind Power Growth
0
10000
20000
30000
40000
50000
60000
70000
80000
90000
100000
2002 2003 2004 2005 2006 2007 2008 2009 2010
Year
US
, E
uro
pe a
nd C
hin
a Insta
lled
Capacity (
MW
)
0
1000
2000
3000
4000
5000
6000
UK
Insta
lled C
apacity (
MW
)
UK (MW)
US (MW)
China (MW)
Europe (MW)
Figure 2.2: Wind Markets by Installed Capacity

- 12 -
Figure 2.2 shows the growth in wind power installations in the UK in comparison to the
three key wind power markets: China, Europe and the USA. Europe’s historic role in the
early development of wind energy can be seen by the high number of installations pre-
dating 2004. Whilst Europe continued to see significant growth in the wind industry since
2004, the USA showed an increasing appetite for clean energy sources in the last decade
to become a second key market. The third key market resulted from China’s fast growth
rate, which has led it from relative insignificance in 2004 to being the principal market
globally today. In comparison, the UK is a relatively small contributor to the wind market
as a whole, but with a relatively small islanded grid system could see very high
proportions of energy derived from wind.
2.3 The UK Wind Industry
There are two underlying drivers of the UK’s wind industry: concerns surrounding climate
change and concerns regarding security of the energy supply. International concern about
the impact of rising atmospheric Carbon Dioxide levels has led to European legislation
from the Commission of the European Communities [7] targeting a European-wide 20%
contribution to energy supply from renewables by 2020. Additionally, the UK has
historically depended on North Sea fossil fuel reserves to provide security of supply.
However, Department of Energy and Climate Change (DECC) statistics [8] show that the
North Sea gas output has been in long term decline owing to resource depletion, as shown
in Figure 2.3. This decline has already made the UK a net importer of oil and gas and will
lead to decreasing security of supply.
Figure 2.3: North Sea Gas Reserves according to DECC [8] statistics
The UK’s relatively shallow continental shelf has traditionally aided the North Sea
industries and also provides a significant advantage for offshore wind power deployment.

- 13 -
Shallow waters, close to shore, typically permit simpler foundations and less costly
connection to the onshore electricity network. The UK has a relative abundance of such
sites, as shown in Figure 2.4 from the Department of Business, Enterprise and Regulatory
Reform (DBERR) [9].
Figure 2.4: UK Continental Shelf Water Depth according to DBERR[9]
Landscape protection interests are cited by Toke [10] as a barrier to widespread onshore
wind power development in the UK. However, he finds the UK has significant strengths
including a central planning regime for offshore wind developments and the historic
development of offshore energy assets. Overall Toke concludes that the UK is very likely
to receive 20% of its electrical energy from wind power by 2020, but that distinctively,
much of this power will come from offshore wind development.
Figure 2.5: European Offshore Wind Resources, Copyright © 1989 by Risø National Laboratory,
Roskilde, Denmark, used with permission

- 14 -
Figure 2.5 illustrates that the UK has the best offshore wind resource in Europe, which,
coupled to the relatively shallow continental shelf makes it favourable for offshore
development. As such, the Crown Estate has operated three rounds of leasing for
development of offshore wind farms, using a zone based approach. These leases have a
maximum cumulative capacity of 40GW, with single zones of up to 9GW.
The mass development of wind power in the UK is expected to have a significant impact
on the operation of other generators. Figure 2.6, compiled by Pőyry Consulting [11] based
on real demand and wind output data, shows that wind’s intermittency will even require
that base load generators be sufficiently flexible to reduce power output in periods of high
wind. Meanwhile, in low wind periods, the back-up of gas fired plant would be critical.
However, in a grid where wind could instantaneously supply upwards of 75% of demand,
it is essential to understand the technology behind wind power plants and how it behaves
in grid connected applications.
Figure 2.6: Pöyry’s [11] Assessment of the Impact of Wind Generation on the UK in 2030
2.4 Wind Farm Development
The offshore wind farms that will provide a significant proportion of the UK’s energy
supply are likely to consist of hundreds of turbines, each individually connected to the
wind farm’s collector network. Figure 2.7 shows a typical wind farm arrangement, with
individual turbines in series and ‘strings’ of turbines connected in parallel, however,
overall, the power is collected and connected to the onshore grid at a single interface
point. Often reactive power compensation is then required at the onshore substation such

- 15 -
as Insulated Gate Bipolar Transistor (IGBT) based Static VAR Compensators (SVCs).
From a power system perspective, when the UK is subject to good wind conditions, these
wind farms will dominate the power system and will need to provide some of the ancillary
services that help to maintain a secure grid today.
The behaviour of the turbines is therefore critical to the operation of the wind farm as a
whole. Additionally, the technology used in the wind farm’s grid connection will affect
the interface that the grid sees with the wind farm. These two aspects are explored in this
section.
Figure 2.7: Typical Offshore Wind Farm Arrangement (Photos courtesy of GE Energy Power
Conversion)
2.4.1 Wind Turbine Development
Hansen and Hansen [12] categorises wind turbines by two independent metrics, power
control and speed control type. This work identifies the evolution of four distinct types of
wind turbine, 1, 2, 3 & 4, these will be introduced in detail in sections 2.4.1.1 to 2.4.1.4.
Figure 2.8, taken from this work, shows the gradual decline in importance of Type 1 and 2
wind turbines and the increasing use of later designs relying on power electronics, pitch
control and variable speed generators. This is a trend which has only continued since
2005.

- 16 -
Figure 2.8: Market Share of the Different Wind Turbine Types (from Hansen and Hansen [12], with
modified legend)
2.4.1.1 Type 1: Fixed Speed Induction Generator
The synchronous machine is the natural generator choice for conventional power stations;
however, its rigidly fixed speed is not ideal for wind applications where rotational speed
has a critical influence of energy yield. Soter and Wegener [13] have shown that instead,
the induction generator, with a narrow range of speed determined by the slip, provides a
slight improvement. This meant that most early turbines consisted of induction generators
directly coupled to the grid, however, their limited speed range still led to them becoming
known as Fixed Speed Induction Generator (FSIG) type turbines.
Figure 2.9: Fixed Speed Induction Generator Wind Turbine
Figure 2.9 shows the key components of an FSIG turbine. The grid’s 50Hz, combined
with a typically 4 pole induction generator mean that the high speed side of the gear box
spins at around 1500 revolutions per minute (rpm). A high ratio, multi-stage, gear box
would then step this down to around 20rpm blade speed for a large scale wind turbine.
The induction machine’s reactive power consumption necessitates power factor correction
capacitors connected across the machine’s terminals, to avoid drawing excess reactive

- 17 -
power from the grid. The blades are designed to aerodynamically stall when the wind
speed exceeds the rated speed for the turbine, thus limiting power capture.
The fixed speed induction generator’s simple design and low cost made it successful in
the early development of the wind industry. However, it suffered from several drawbacks;
first the fixed speed limited its capacity to capture all of the available wind power.
Second, the machines tended to trip under large voltage disturbances, which whilst
acceptable when wind was a small percentage of generation, became unacceptable as the
industry advanced. Further, wind gusts led to both mechanical stresses on the turbine and
power fluctuations into the grid.
2.4.1.2 Type 2: Variable Resistance Induction Generator
In order to improve on the FSIG’s energy yield and reduce mechanical stress, the Variable
Resistance Induction Generator (VRIG) was developed. This uses a wound rotor induction
generator, with a switchable rotor resistance, allowing the turbine to be operated at
variable speed. This design is shown in Figure 2.10. With a power electronic component
switching the three phase rotor resistance, reasonable control over the torque-slip
characteristic can be achieved. This meant that power quality improved and noise reduced.
Figure 2.10: Variable Speed Induction Generator Wind Turbine
The VRIG still has drawbacks, however, as the range of speeds that the turbine can
operate over is typically still narrow at around 10% of the rated speed according to
Muljadi et al. [14]. This means that it is not possible to operate the turbine at the optimal
aerodynamic point in all conditions. Further, the switchable rotor resistance is inherently
high loss and the wound rotor induction generator is more complex and expensive than the
equivalent squirrel cage machine would be.

- 18 -
2.4.1.3 Type 3: Doubly Fed Induction Generator
Given the additional expense of the wound rotor induction generator, combined with the
falling costs of power electronics, the natural successor to the VRIG was the Doubly Fed
Induction Generator (DFIG). In this design, the rotor of the induction generator is fed with
a back to back power converter. Hansen and Michalke [15] have suggested this power
converter only needs to be sized at 20-30% of the rating of the machine. This power
converter rectifies the output of the generator to DC before inverting it back to AC. This
means that, within the limits of the power converter, the rotational speed of the turbine
blades is completely decoupled from the electrical grid frequency. This typically permits a
±30% speed range relative to synchronous and this decoupling allows optimal
aerodynamic performance over the vast majority of the turbine’s operating range.
The DFIG has many other advantages, as the power electronics can compensate the
reactive power requirement of the generator and allow output operation at a range of
power factors. However, the direct grid connection of the stator can cause high rotor
currents and voltages during grid disturbances, the rotor could then feed these directly to
the power converter, which is not designed for high over currents or over voltages. This
sometimes necessitated the use of a crowbar, which short circuits the rotor to protect the
power converter during faults. This increases significantly the control complexity of the
turbine during grid voltage disturbances.
Figure 2.11: Doubly Fed Induction Generator Wind Turbine
2.4.1.4 Type 4: Full Converter
An alternative approach to achieving variable speed operation is to fully decouple the
generator from the grid via a power electronic converter. Chen, Guerrero and Blaabjerg
[16] conclude that such decoupling gives the advantage that they are less complicated to
control and can provide active grid support during faults, without the drawback of DFIG

- 19 -
protection schemes. Three different generator types can be used under this scheme, which
are outlined here.
• Fully Fed Synchronous Generators (FFSG)
The early full converter wind turbines were developed around synchronous generators of
the so called ‘Enercon-concept’. The use of a full converter allows excellent grid side
control, whilst the familiar synchronous generator has the benefits of rotor excitation
control and fully decoupled speed. However, Jauch [17] has shown that such systems
require active damping of the mechanical system as a result of this decoupling.
Furthermore, Jauch asserts that grid codes have become more comprehensive requiring
wind turbines such as FFSGs to provide more grid services such as power system
damping.
Figure 2.12 shows the arrangement of a FFSG, either a single stage gearbox with medium
speed generator, or even no gearbox with a low speed generator is possible. The direct-
drive version benefitting from gear box elimination and hence reduced maintenance, but at
the expense of a very large diameter machine. However, the rotor requires electrical
excitation and the power electronics required can be expensive.
Figure 2.12: Fully Fed Synchronous Generator Wind Turbine
• Fully Fed Induction Generators (FFIG)
An alternative full converter wind turbine concept was proposed by Peña et al. [18]
comprising an induction generator with back to back converters. The simple, low cost of a
squirrel cage induction generator, together with control to operate at optimal speeds
therefore promised an improvement in turbine economics.
Molinas et al. [19] have shown that this type of turbine could meet the requirements of
low voltage ride-through and other challenges of grid codes in the same way that the
FFSG could. However, the rotor still requires excitation, increasing the stator currents and
losses even in low wind conditions. Furthermore, this design typically requires a

- 20 -
multistage gearbox to increase the generator’s rotor speed. Hence, a lighter machine is
traded off against a more complex gearbox in comparison to the FFSG.
Figure 2.13: Fully Fed Induction Generator Wind Turbine
• Fully Fed Permanent Magnet Generators (FFPMG)
Permanent Magnet Generators (PMGs), despite being considered for wind power
applications for years, were only appearing in Megawatt class turbines from 2005
onwards, with GE and Siemens leading the way according to Akhmatov [20]. The
magnetic rotor excitation offers the promise of higher efficiency, particularly at low loads.
Further, high pole number machines can be designed to eliminate the need for a gearbox,
whilst the power converter maintains the decoupling from the grid frequency. Figure 2.14
shows the key components of a PMG wind turbine system and highlights that gear boxes
for this scheme are optional.
Figure 2.14: Fully Fed Permanent Magnet Generator Wind Turbine
Despite the PMG’s many advantages, it still suffers two significant shortcomings; first the
rotor excitation is fixed, meaning that the power converter must be designed carefully to
match a specific machine. Second, for direct-drive designs, as the wind turbine blade
diameters increase, their rotational speed falls; this means that multi-pole machines must
have ever higher pole numbers. Hence, large PMG designs are likely to lead to rising
generator diameters and masses.
2.4.1.5 Future Advances
In order to address the problem of the increasing mass of direct-drive turbines, high
temperature superconducting generators for wind turbines have been proposed by Lewis
and Műller [21]. This type of generator is estimated to lower the mass of the generator,
compared to a standard PMG, by around 50%, whilst also potentially allowing further

- 21 -
efficiency gains through the use of superconducting wires. However, currently the costs of
superconducting wires prohibit the uptake of these designs.
An alternative approach also aimed at reducing mass and volume is to integrate the power
electronic converter with the stator of the generator, creating an advanced DC generator.
Loddick [22] asserts that such a machine is particularly suited to wind power’s torque-
speed characteristic for low speed direct drive applications. Further, he proposes the
integration of this technology with DC networks as a step forward for wind farms as a
whole.
The common feature of proposed advances in wind turbine technology is the increasing
integration of sophisticated power conversion technology with the generators. These
power converters offer excellent controllability and flexibility but present inherently
different characteristics to the grid to a conventional synchronous power plant.
2.4.2 Grid Connection
The changing electrical technology in wind turbines is not the only area that is affecting
wind farms’ integration with the grid. The UK’s moves to offshore wind power will
necessitate new transmission connections. Djapic and Strbac [23] identify that of the UK
offshore wind farms allocated during the Crown Estate’s licensing, some will be AC
connected and some DC connected, whilst there are also some opportunities for
interconnection of the various wind farm zones.
2.4.2.1 AC Connection
All of the round one offshore wind farms in UK waters were close to shore in shallow
waters. This meant that AC connection remained the preferred grid connection option,
with a variety of different voltage levels either available or in development for offshore
applications. Morton et al. [24] looked at the possible configurations for Round Two
developments, which are further from shore and generally in deeper water and concluded
that all but two of these were likely to still be using a standard 132kV AC connection to
shore with little or no redundancy.
Figure 2.15 shows that the AC connection of offshore wind farms is a simple design with
a synchronous link either connecting into a distribution network at 132kV or being
stepped up and connected into the transmission network at 275 or 400kV. The differences
to an onshore wind farm’s electrical system are two-fold, first additional power factor
correction equipment is necessary at the point of connection to the grid to compensate for
the offshore cable. Second, distribution network connected wind farms and small

- 22 -
installations of less than 50MW are not subjected to many of the regulatory requirements
of Grid Code. Whilst most onshore wind farms avoid this burden, the majority of new
offshore wind farms will not.
Figure 2.15: Offshore Wind Farm with AC Connection
Under the regime set up to deliver the offshore wind farm grid connections, the Offshore
Transmission Owner (OFTO) would be responsible for delivering a connection from the
HV side of the onshore step up transformer to the LV side of the offshore transformer on
the offshore platform. Under such a scheme, the offshore generator can be considered as
an extension to the GB onshore transmission network, albeit a remote one.
2.4.2.2 DC Connection
The use of a DC connection has the benefit of reducing the number of expensive subsea
cables required for connection to shore. Further, over long distances AC connections
require periodic voltage compensation and additional capacitive charging current,
therefore suffering from higher losses. These effects mean that over long distances DC
transmission is preferable to AC transmission.
Round three wind farms are again further offshore than the previous two rounds of Crown
Estate licenses. This means that there is significant scope for DC grid connection. This
removes the need for onshore power factor correction equipment owing to the four
quadrant capability of the link’s onshore inverter. Typically the offshore AC grid is still
maintained as an AC grid at 50Hz owing to the standardised equipment for this

- 23 -
application. However, this offshore grid is decoupled from the onshore grid through high
voltage power electronics (either conventional thyristor based or modern IGBT based).
Under this regime, the OFTO’s scope of ownership would include the DC connection and
associated converter equipment as shown in Figure 2.16. The control of real power
remains the responsibility of the wind farm, whilst reactive power becomes the
responsibility of the onshore High Voltage Direct Current (HVDC) converter owned by
the OFTO. This effectively means that the offshore wind farm operates as an island
isolated from the onshore network, with only control schemes linking the two, but the
wind farm must still have appropriate real power control.
Figure 2.16: Offshore Wind Farm with DC Connection
2.4.2.3 Future Advances
The move towards HVDC transmission of offshore wind farms’ power has led some, such
as Zhan et al. [25] to propose DC collector networks for the offshore wind farm as well.
Such a scheme claims higher efficiency, availability and power density than the existing
AC collector networks. The offshore wind farm, as in the DC connected case, is largely
isolated from the onshore grid and reliant on control schemes to provide the necessary real
power control.
2.4.2.4 European Supergrid
The widespread development of wind power has led to the proposal, originally by
Airtricity, that a pan-European HVDC grid could lower the costs of integrating renewable
energy into the grid. This concept has now been developed into a more detailed design.
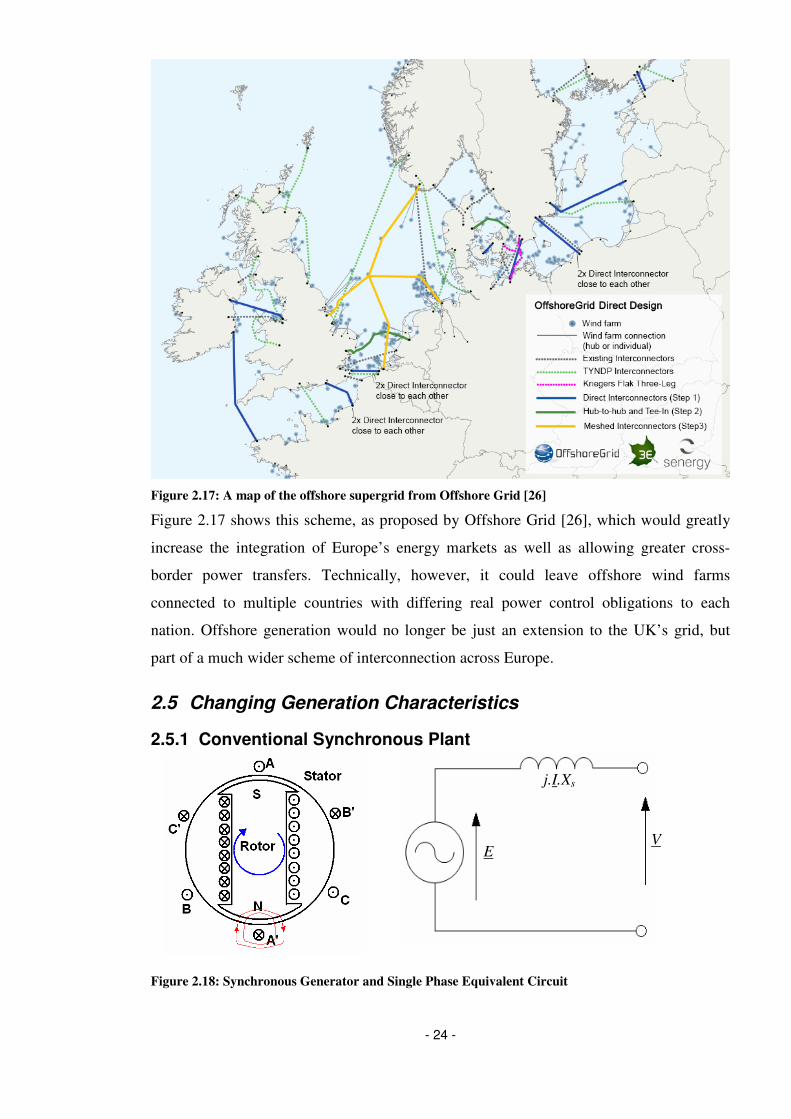
- 24 -
Figure 2.17: A map of the offshore supergrid from Offshore Grid [26]
Figure 2.17 shows this scheme, as proposed by Offshore Grid [26], which would greatly
increase the integration of Europe’s energy markets as well as allowing greater cross-
border power transfers. Technically, however, it could leave offshore wind farms
connected to multiple countries with differing real power control obligations to each
nation. Offshore generation would no longer be just an extension to the UK’s grid, but
part of a much wider scheme of interconnection across Europe.
2.5 Changing Generation Characteristics
2.5.1 Conventional Synchronous Plant
Figure 2.18: Synchronous Generator and Single Phase Equivalent Circuit
E V
j.I.Xs

- 25 -
The majority of the UK’s conventional power plants use steam or gas turbines to drive
synchronous generators directly coupled to the electric grid. As the synchronous machine
has provided the mainstay generator for the UK’s power grid, understanding its basic
behaviour is fundamental to understanding the changes that wind farm technology will
bring to the grid. Some of the key grid interactions of these plants can be understood by
considering an idealised synchronous machine as shown in Figure 2.18 and considering a
single phase representation of the machine, which assumes that the system is balanced.
The three-phase grid voltage drives the current in the stator windings to produce a
magnetic field in the machine’s air gap that rotates at a speed (ωs) defined by the grid
frequency (fgrid) and the machine’s pole pairs (p). This is shown in Equation 2.1 and
Equation 2.2.
Equation 2.1 p
fgrid
s
⋅⋅=
πω
2
Equation 2.2 tBBsss⋅⋅= ωcosˆ
The rotor of a synchronous machine is fed with a DC current which sets up a fixed
magnetic field, in effect as a dipole magnet. Careful design of the rotor windings ensures
that the rotor field is sinusoidally distributed round the air gap. When this rotor is driven
to rotate, either motored by the stator field or by the action of a prime mover, then the
dipole rotates, setting up a second sinusoidally rotating component of magnetic field in the
machine’s air gap as in Equation 2.3. The rotor and stator magnetic fields rotate
synchronously, ensuring that the total field also rotates with a sinusoidal distribution.
Equation 2.3: ( )θω −⋅⋅= tBBrrr
cosˆ
Figure 2.19: Synchronous Machine Vector Diagrams
The total rotating air gap magnetic field, comprised of both the stator and the rotor
components, leads by Faraday’s law (dt
dNE
ψ⋅−= ), to a back Electromotive Force
(EMF) induced in the stator windings, E, as given in Equation 2.4.
Br
Bs
Bt
∠BrBs = α
O
Et
V j.I.Xs
O
I
∠I V = ϕ ∠Et V = ∠BrBt= δ ∠I (j.I.Xs) = 90°

- 26 -
Equation 2.4 ( )δω +⋅⋅= tEEr
cosˆ
Figure 2.19 shows the magnetic field (left) vector diagram for the case of a rotor field
lagging the stator field, alongside the phasor diagram for the machine (right).
The magnetic torque acting on the rotor can be defined according to the equation for the
magnetic moment acting in a magnetic field, BmT ×= . Hence the torque can be seen to
be given by Equation 2.5 where D is a constant.
Equation 2.5 αsinˆˆ ⋅⋅⋅=sr
BBDT
By considering that from the vector diagram δα sinˆsinˆ ⋅=⋅ts
BB
Equation 2.6 δsinˆˆ ⋅⋅⋅=rt
BBDT
The implication of this is that the torque produced by the synchronous machine is
dependent upon the angle between the rotor magnetic field and the total magnetic field,
also known as the load angle. Hence, for steady torque production, this angle must be
constant and the rotor and stator must be rotating synchronously. Furthermore, the torque
from the synchronous machine varies in a sinusoidal relationship with the load angle.
This can also be deduced by considering the phasor diagram, the back EMF is defined as
in Equation 2.7.
Equation 2.7 s
XIjVE ⋅⋅+=
The real power output from the machine can then be defined by Equation 2.8.
Equation 2.8 φω cos3~~
⋅⋅⋅=⋅= IVTPs
By considering the phasor diagram trigonometric relationships:
Equation 2.9 ( ) φφδ cos90sinsin ⋅⋅=−⋅⋅=⋅ss
XIXIE
So φδ
cossin
⋅= IX
E
s
from Equation 2.9 and hence:
Equation 2.10
s
sX
EVTP
δω
sin3
⋅⋅⋅=⋅=
So the torque can be expressed as:
Equation 2.11 δω
sin3
⋅⋅
⋅⋅=
ssX
EVT

- 27 -
Equation 2.11 shows that the generator torque is critically dependent on the angle between
the generator’s internal EMF and the network voltage.
2.5.2 Grid Faults
The phasor diagram of Figure 2.20 shows the effect of a grid voltage that is transiently
suppressed from its nominal rating. The rotor field windings initially continue to be fed
with the same DC current, so the rotor magnetic field is unaffected, supporting the internal
EMF. However, to compensate for the reduced grid voltage, an increased reactive current
is drawn from the machine, dropping voltage across the stator reactance and closing the
phasor triangle. An Automatic Voltage Regulator (AVR) could then act to control to
voltage or reactive power fed into the grid, but there is still an initial current increase. This
current in-feed helps to trip protection devices in the event of a grid fault.
Figure 2.20: Phasor Diagram under Normal (left) and Suppressed (right) Voltage
2.5.3 Grid Inertia
Equation 2.11 considers the torque dependency on the machine’s load angle, but this
inherently assumes constant frequency behaviour of both the rotor and the stator. A
reduction in grid frequency has the effect of gradually changing the angle between the
stator and rotor magnetic fields, and therefore increasing the load angle of the machine.
This relationship between the machine’s frequency and torque means that falling grid
frequency automatically increases the torque, provided it does not exceed the maximum
torque at 90°. This torque increase draws kinetic energy ( 2
2
1ω⋅⋅= JKE ) from the rotor
and accompanying spinning mass. Given that the machine’s rotor must ultimately remain
synchronous to the grid’s frequency, the power output from the machine can be
approximately found by differentiating the rotor’s stored kinetic energy with respect to
time as shown in Equation 2.12. This means that the power output of a synchronous
machine has been shown by Morren, Pierik and de Haan [27] to be broadly proportional to
the rate of change of frequency, acting as an automatic stabiliser to rapid frequency
changes.
Et
j.I.Xs O
∠I V = ϕ ∠Et V = δ ∠EtI = 90°
Et
V j.I.Xs O
I
I
V

- 28 -
Equation 2.12 dt
dJ
dt
dJ
dt
KEd ωω
ωω ⋅⋅=⋅⋅⋅= 2
2
1)(
-1.5
-1
-0.5
0
0.5
1
1.5
-200 -150 -100 -50 0 50 100 150 200
Load Angle (δ) (º)
Pe
r U
nit
To
rqu
e
Figure 2.21: Effect of Frequency Decrease on Load Angle and Torque
Specifically, however, the machine’s output will be dependent on the change in torque,
which is in turn dependent on the change in load angle. The torque will follow the
sinusoidal load profile as the load angle increases or decreases as shown in Figure 2.21. A
frequency difference between the rotor and stator fields creates the change in load angle.
This acts to smooth out the inertial contribution to rapid frequency deviations as the
torque does not step from one level to another.
2.5.4 Grid Frequency
Grid frequency changes result from imbalance between generation and demand, and
whilst the inertia of synchronous machines helps to arrest rapid deviations, ultimately the
imbalance must be eliminated before the frequency can be brought back to target. With a
synchronous generator, this is achieved through governor action, whereby a generator will
increase or decrease its output in proportion to the magnitude of the frequency excursion,
through increased steam raising or boiler action.
2.6 A Challenge for the GB Grid
2.6.1 The UK’s Offshore Wind Farms
Section 2.4.1 highlighted the move in wind turbine technology towards increasing use of
power electronics. These power converters involve extremely fast control loops that are
flexible to react rapidly to desired changes. Fast control is also essential because of power
electronic switches’ sensitivity to over current and the need to rapidly reduce currents in
the event of a fault on the output. The impact of the fast control of a power converter is to
limit the in-feed current in the case of a fault to a much lower level than might be the case
with a traditional synchronous generator.
Generating
Motoring Effect of frequency decrease

- 29 -
The power converters are also deliberately designed to decouple the rotational frequency
of the blades from the grid frequency so as to maximise the energy capture from the wind.
Yet this removes the inertia to frequency changes that synchronous machines inherently
provide to stabilise the grid. A frequency change on the grid side is rectified to DC and
not automatically seen by the machine side. Hence, the kinetic energy of the blades does
not automatically stabilise the grid.
In response to supply shortfalls causing a frequency change, a wind turbine’s output is
limited by the available wind power. Whereas a conventional synchronous plant could
increase its output by burning more fuel or steam raising, the wind turbine has no
equivalent extra resource. This means that for a wind turbine to provide low frequency
response, it would have to deliberately operate at a reduced output. This involves spilling
wind energy in order to hold a margin and have the potential to increase its output in
response to a falling frequency, but does not have associated fuel savings.
These three differences, which are inherent to the design of wind turbines, and provide
them with exceptional controllability, mean that power converter interfaced wind turbines
behave very differently to grid disturbances to the familiar synchronous generators.
Section 2.4.2 highlighted the trends in grid connection which will further distance
offshore wind farms from the grid of today. The increasing use of DC transmission and
potentially distribution will lead to isolation of the offshore wind farms from the
behaviour of the onshore grid. This provides not only technical challenges, to ensure the
continued security of the GB grid, but also regulatory ones.
Today the effects of rising wind power levels are already beginning to be felt, with the
National Grid having to act to constrain wind in 2011 to ensure the security of the GB
system according to the Renewable Energy Foundation [28]. With ever growing levels of
wind power, the challenges of managing the system will continue to grow and challenges
other than constraints will emerge. These challenges, combined with the technological
differences of wind farms will mean that the grid in 2020 with 33GW of offshore wind is
likely to have to look very different to the grid of today. The challenge is to deliver this
whilst protecting the security of supply and grid stability experienced today.
2.6.2 The Grid’s Frequency Challenge
Major frequency deviations on a power system usually occur as the result of a large
generator or load tripping and disconnecting. Such events are currently extremely rare;
however, the GB grid was shown to be susceptible to sizeable frequency deviations by the

- 30 -
events of 27th May 2008. On this occasion, the UK’s largest nuclear plant, Sizewell B,
tripped offline shortly after a coal plant of 345MW. This led to a supply shortfall of
around 1582MW having to be picked up by responsive generators. This is just within the
1600MW maximum loss that the GB grid is typically secured against.
Figure 2.22: GB System Frequency 27th May 2008
After the loss of these two generators, the subsequent frequency fall, whilst initially
arrested, then accelerated again and was ultimately only stopped by the activation of
automatic demand disconnection at 48.8Hz. This further frequency fall is not totally
explained, however, the official report, from National Grid [29], found that “The
unexpected loss of a significant amount of small embedded generation resulted in a total
loss of some 1993MW in 3.5 minutes”. This embedded generation was outside of the
scope of the transmission system Grid Code and therefore was subject to G59, which the
National Grid [30] review found at the time set recommended frequencies at which
generation should trip; this is the reverse philosophy to that applied in Grid Code. It
brought forward the activation of automatic demand disconnection.
Immediately after the loss of each generator, the inertia of the large number of
synchronous machines on the system helped to slow the Rate of Change of Frequency
(ROCOF) such that the maximum ROCOF was 0.073Hz. This provided time for other
plant to increase their output powers to compensate for the lost plant and prevented the
level of demand disconnection being worse. This event demonstrates the importance of
synchronous machines’ inherent inertia in securing the grid.

- 31 -
In the run up to 2020 the UK may have single generation connections of 2GW as a result
of the offshore wind development plans. Partly as a consequence of this, the power system
will be secured against a loss of 1.8GW by National Grid [31] and will also have to deal
with connections from wind turbine technologies with very different grid interfaces to
conventional generation. In a small islanded system, where frequency can already see
significant deviations, this thesis addresses what future offshore wind farms can do to
support the grid’s frequency stability and whether energy storage is ready to provide a
more robust solution.
2.6.3 Power System Oscillation
Ashton et al. [32] have shown that the UK transmission system currently experiences a
number of power system events due to circuit switching as well as a significant major
oscillation between the generators of Scotland and those of England and Wales. Currently
limited capacity across the North/South boundary does not help this situation. Figure 2.5
shows that the UK’s best wind resources are located in the North, beyond the constraint
boundary. Development of these resources will lead to increased stress of the system and
is part of the cause of National Grid’s installation of a wide area monitoring system based
on phasor measurement unit installations at some substations.
The installed monitoring system has been shown by Ashton to have measured the time
delay as a large frequency deviation rippled through the system following a loss of a
generator. A time delay of 0.65s was observed between the frequency deviation occurring
at the closest substations to the lost generator and those furthest away. The monitoring
system provides a large amount of real time data which will in future enhance the system
operator’s visibility of events such as that in Figure 2.22, the challenge will be to use that
data to secure the system’s stability in the face of these multiple challenges.
2.7 Potential Application of Energy Storage?
Concurrent with the development of large scale offshore wind power, National Grid’s
“Gone Green” scenario anticipates a renewed development of Nuclear Power in the UK.
These two factors contribute to National Grid’s [33] projections that the GB system
requirements for frequency response reserves will be significantly increased before 2020,
as outlined in Figure 2.23. This increase in low frequency response requirement, to cover
loss of generation, together with the high price that wind power would require to provide
such services, suggests that the value of frequency response will inevitably significantly
increase in the coming decade.

- 32 -
Figure 2.23: National Grid’s [33] Projection for Requirement for Frequency Response (The solid line
represents the typical requirement, with maximum and minimum requirements shown by the dashed
lines)
The increasing importance of providing balancing services to transmission systems is not
a phenomenon specific to the GB system. Walawalker, Apt and Mancini [34] investigated
the economics of frequency regulation services in New York and concluded that there
were “significant opportunities” for the application of flywheels to frequency regulation in
New York state. They also noted the developments of Beacon Power towards commercial
application of frequency response services with flywheels in both California and New
York states. Alongside Beacon Power, other energy storage manufacturers, such as A123
Systems, according to Vartanian and Bentley [35], have been investigating the frequency
response market as a potential opportunity for their products.
Oudalov, Chartouni and Ohler [36] of ABB Ltd. have had a detailed look at the potential
for energy storage solutions to provide primary frequency control (i.e. short time-scale
only) on part of the European transmission system. Their comparison of Vanadium Redox
Flow, Sodium Sulphur, Lead Acid and Nickel Cadmium batteries concluded that Lead

- 33 -
Acid is viable for this application, in conjunction with dump resistors for accommodating
high frequency response when the battery is fully charged. However, their analysis was
limited to primary frequency control and therefore considered only relatively short
timescales. Nevertheless, this further demonstrates the increasing interest that
manufacturers are taking in the frequency response markets.
Despite the growing interest of manufacturers, Beacon Power, who backed by a US
government loan guarantee program built their 20MW flywheel based frequency
regulation plant in New York State, have recently filed for bankruptcy according to Hals
and Hampton [37]. Their brief exploration of this opportunity showed that the commercial
environment for application of flywheels to frequency response is not viable yet in the
U.S.A.. Their ultimate failure could be put down to technology, timing or both; but they
have perhaps pointed to a possible future for power systems; with generators providing
bulk energy and energy storage systems providing balancing services.
Figure 2.24: Wind Output During Periods of Peak System Demand according to National Grid [38]
In addition to the potential opportunity for energy storage to contribute to system
balancing, there are longer timescale opportunities emerging for energy storage. Figure
2.24, from National Grid [38], shows a typical wind turbine output power profile against
wind speed, superimposed on the graph are the measured wind speeds during the top five
annual power demand periods for the years 1985 to 2008. The y-axis represents both the
year and the power output from a typical wind turbine. It highlights that in the 25 year
period considered, the average wind speed during the five half-hour periods with highest
demand was never above 10m/s. Based on the typical wind turbine’s power production
curve this illustrates that it would be likely that during peak demand periods wind would

- 34 -
be operating at less than 50% of its capacity. This illustrates the need for firm power
capacity.
The broad correlation between low wind speeds and high system demand, during winter
anti-cyclones in the UK, illustrates the need that the UK has for firm capacity to provide
for the power system’s peak demands. This is an area where longer term energy storage
may become increasingly technically and economically necessary.
One of the most comprehensive analyses of the application of energy storage in power
systems is by Eyer and Corey [39] of Sandia National Laboratories. Their work identifies
the need to aggregate different energy storage applications in order to develop “Value
Propositions” that are economically viable. One of the eight value propositions they
investigate is “Renewables Energy time-shift plus Electric Energy Time-shift plus Electric
Supply Reserve Capacity”. This value proposition is the only complementary application
including supplying reserve power to the power system. It involves using an energy store
to provide reserve power at night, whilst charging, and then dispatching that energy into
the peak demand periods, such as those of Figure 2.24. By charging at night the store can
not only take advantage of typically cheap night time power prices, but can also offer
greater capacity for fast reserves as it can revert from charging to discharging.
In the context of this application, the next section will explore the capabilities of different
storage technologies to contribute to solving these challenges as wind power deployment
grows.
2.8 Summary
The development of the wind industry in the UK is likely to see significant offshore
deployment. The technology for both offshore turbines and offshore grid connection is
developing towards solutions that decouple the generators from the onshore grid through
power electronics incorporating interim DC stages. This means that these offshore wind
farms do not provide some of the inherently stabilising actions that a conventional
synchronous machine would. This will lead to challenges for the control of offshore wind
farms in order to maintain the frequency stability of the onshore grid and to provide fault
in-feed currents. These are challenges that the rest of the thesis sets out to address.

- 35 -
3 Modelling of Full Converter Wind Turbines
3.1 Introduction
The growth in wind power on power systems has necessitated development of wind
turbine models that are appropriate for the study of grid interactions. Slootweg et al. [40]
have characterised the key elements that require modelling for power system studies. This
chapter therefore covers the development of a suite of full converter wind turbine models
appropriate for power system studies. Figure 3.1 illustrates the key elements of such a
model, which allows studies from the raw wind input to the grid electrical output.
Figure 3.1: Full Converter Wind Turbine Model Elements
Sections 3.2 to 3.4 cover modelling of physical elements of the system, from the blades to
the output of the power converter into the grid. Section 3.5 then covers the control of the
wind turbine components and system, this section starts at the level of the power converter
control and progresses to cover both the wind turbine control and then the control schemes
that have been used with large scale wind farms. Section 3.7 then covers the validation of
the component parts that make up the wind turbine models.
3.2 Aerodynamics
The available power in the wind can be calculated by considering the kinetic energy of the
air passing through the swept area of the blades. Consider that the kinetic energy (KE) of a
mass of air is given by:
Equation 3.1 2
2
1w
vmKE ⋅⋅= where m is the mass of the air and vw, the wind speed.
The power output is given by the differential of the kinetic energy with respect to time.

- 36 -
Equation 3.2 dt
vmd
Pw
w
⋅⋅
=
2
2
1
Now the mass flow rate of the air is given by:
Equation 3.3 w
vAdt
dm⋅⋅= ρ where A is the blades’ swept area and ρ is the air density.
Hence, the total power available in the wind, Pw, is proportional to the cube of the wind
speed, as shown in Equation 3.4:
Equation 3.4 3
2
1ww
vAP ⋅⋅⋅= ρ
However, the power captured by the wind turbine, P, will only be a proportion of this,
dependent on a performance coefficient Cp. It has been shown by Burton et al. [41] that
the limit on Cp, known as the Betz Limit, is 59.3%. Equation 3.5 illustrates that there are
two key aspects of the aerodynamics which must be modelled in order to accurately
reflect a wind turbine’s output: The prevailing wind speed and the wind turbine’s
coefficient of performance.
Equation 3.5 3
2
1wp
vACP ⋅⋅⋅⋅= ρ
3.2.1 Wind Modelling
Sorensen et al. [42] have shown that accurate wind power output modelling requires
simulations of long slow wind variations that are not typically included in standard
turbulence models. Sorensen also shows that individual large offshore wind farms can
suffer from greater power fluctuations than would be the case for the onshore fleet. This is
caused by the correlation of wind fluctuations at individual turbines being much higher
than would be the case for distributed onshore turbines, due to an offshore wind farm’s
geographical concentration.
This work therefore takes two approaches to modelling the wind: first, when individual
wind turbine component design is considered, a single turbine turbulence model is used
and fed with extreme wind speed conditions. Second, several months’ power output data
from the Horns Rev offshore wind farm have been provided by Hugh Sharman at
Incoteco. This allows accurate simulation of the output power from an entire wind farm,
without the need for this work to investigate detailed farm level wind models.

- 37 -
Sorensen, Hansen and Carvalho-Rosas [43] have presented wind models that are
segregated between the wind farm model which provides a hub wind speed reference to a
separate wind turbine level turbulence model. Sorenson’s model provides a good wind
model structure and details of the transfer functions of the output stage filters. IEC 61400
[44] contributes further by recommending the use of independent turbulence in the
fundamental, 3p horizontal and 3p vertical elements. The structure of an appropriate wind
model is shown in Figure 3.2.
Figure 3.2: Wind Model Structure
In order to implement this wind model with maximum simulation speed, the white noise
generators have been implemented according to the Ziggurat algorithm presented by
Marsaglia and Tsang [45]. The implementation of this can be found in appendix 9.1.1.
The rational filter approximations to the Kaimal spectra are taken from Diop et al. [46],
whose work demonstrates the application of Von Karman and Kaimal filters to meet the
requirements of IEC 61400. The application here considers only the component normal to
the blades’ swept area. The Kaimal filter, as specified by the IEC standard, therefore
reduces to:

- 38 -
Equation 3.6 ( ) ( ) ( )( ) ( ) ( )161616
16164
42
31
+⋅⋅⋅⋅+⋅⋅⋅⋅+⋅⋅
⋅+⋅⋅⋅⋅+⋅⋅⋅⋅⋅=
sTmsTmsT
sTmsTmTsH
Where: m1, m2, m3, m4 = 0.745, 0.152, 0.05, 0.0028; T = 170.1m/vmean; vmean is the
mean wind speed (m/s).
3.2.2 Blade Modelling
The derivation of the power output from a wind turbine in the introduction to section 3.2
showed that aerodynamically the power available from a wind turbine is critically
dependent on the wind speed and the coefficient of performance. Wind turbine
performance coefficient relationships are normally manufacturer specific and
commercially sensitive. However, differences between curves are usually small and Heier
[47] is one of a number of authors presenting a model for a typical coefficient of
performance curve as outlined in Equation 3.7 and Equation 3.8.
Equation 3.7 ( ) ( )βλββ ,54321
6cx
p ecccccC ⋅−⋅−⋅−⋅= , where β is the pitch angle of the
blades of the turbine and λ is the tip speed ratio defined as the ratio of speed of the tip of
the blade to the prevailing wind speed w
b
v
R⋅=
ωλ .
5.01 =c , i
cλ
1162 = , 4.03 =c , 04 =c , 55 =c and
i
cλ
216 = where iλ is given as:
Equation 3.8 1
035.0
08.0
113 +
−⋅+
=ββλλi
Figure 3.3: Typical Wind Turbine Performance Curve

- 39 -
It should be highlighted that Heier’s representation of the blades of a wind turbine is a
static approximation to a dynamic system. As such its use represents an approximation of
the true case and is a significant simplification in comparison to a dynamic model using
dedicated software such as Bladed.
Figure 3.3 shows the impact of the tip speed ratio and pitch angle on the wind turbine’s
performance curve. It can be clearly seen that the optimal power capture occurs for a
single ratio of the blade speed to the wind speed at any given pitch angle. This is the
foundation of the benefit of variable speed machines over fixed speed machines, as the
wind speed increases the rotational speed of a variable speed machine can also increase to
optimise the tip speed ratio and maximise power capture. The plot also illustrates that the
coefficient of performance can be reduced by changing the angle of attack of the blades or
‘pitching’. Hence, turbines equipped with blades that can be pitched can exercise fine
control over power output. This is the subject of section 3.5.2.3.
The controller of a variable speed wind turbine has two primary aims. First, to optimise
the rotational speed of the blades so as to maximise the coefficient of performance, second
to minimise the effects of loads due to wind turbulence. These aims, at least in part are
mutually exclusive as minimising loads in turbulent wind normally requires acceleration
or deceleration of the blades away from the optimal operating point so that the torque
acting on the drive train is smooth.
3.3 Drive Train
Figure 3.3 shows that the optimal tip speed ratio for a wind turbine is typically around 8.
The tip speed ratio is defined as w
v
R⋅=
ωλ and for a typical 2.5MW rating the blade
length, R, would be approximately 50m. Further, such a turbine would start up in wind
speeds of 4m/s and reach rated power output in wind speeds of around 14m/s. Hence, to
operate at the optimal coefficient of performance, the optimal blade speed would be:
rpmsradR
vw 6/64.0
50
481 ==
⋅=
⋅=
λω in low wind conditions up to a maximum of
rpmsradR
vw 4.21/24.2
50
1482 ==
⋅=
⋅=
λω in high wind conditions.
However, typical electrical generator frequencies are around 1500rpm. Hence to deal with
such low mechanical frequencies, the drive train either requires gearing or to be connected
to a multi-pole generator with high pole number, or possibly a combination of the two
approaches.

- 40 -
3.3.1 Geared
The level of detail required to represent the drive train of a traditional geared drive-train
has been the subject of much debate. Ramtharan et al.[48] compared two and three mass
models under transient faults, whilst Muyeen et al.[49] investigated 2, 3, transformed 3
and 6 mass models but both ultimately led to an equivalent two-mass model that
represents the fundamental resonant mode of the shaft system. Such a two mass system
considers a lumped mass broadly representing the inertias of the three blades, hub and low
speed part of the gearbox, connected via a spring and damper system to a second inertia
representing the generator and high speed side of the gearbox, referred to the low speed
shaft. This is illustrated in Figure 3.4.
Figure 3.4: Wind Turbine Drive Train System
Ignore the damping and external torques and consider the torque in the spring acting on
the inertias alone:
Equation 3.9 shaft
gen
gen
blade
bladeT
dt
dJ
dt
dJ =⋅−=⋅
ωω
Now consider the rate of change of the shaft torque:
Equation 3.10 dt
dT
K
shaft
shaft
bladegen⋅=−
1ωω leading to
dt
dT
K
shaft
shaft
bladegen⋅+=
1ωω
Hence substituting back into Equation 3.9:
Equation 3.11 dt
dt
dT
Kd
JT
shaft
shaft
blade
genshaft
⋅+
⋅−=
1ω
Simplifying to 2
21
dt
Td
KJ
dt
dJT
shaft
shaft
gen
blade
genshaft⋅⋅−⋅−=
ω
And given Equation 3.9 gives blade
shaftblade
J
T
dt
d=
ω, substitute into Equation 3.11:

- 41 -
Equation 3.12 2
21
dt
Td
KJT
J
JT
shaft
shaft
genshaft
blade
gen
shaft⋅⋅−⋅
−= which rearranges to give:
Equation 3.13 2
2
dt
TdT
J
Kshaft
shaft
eff
shaft=⋅− where
genbladeeffJJJ
111+=
Equation 3.13 solves to give:
Equation 3.14 tj
shafteTT
⋅⋅−⋅= ω
max with eff
shaft
J
K=ω
Hence there is a natural resonant mode within the shaft system that may be excited by
either electrical or mechanical torque steps. Hansen and Michalke [50] have shown that
this natural resonant mode is inherently unstable in variable speed wind turbines, owing to
the decoupling of the speed of the generator from the grid frequency, which removes the
inherent damping in FSIG wind turbines. They highlight the need to implement active
damping controllers to remove oscillations in the drive train. This will be covered further
in section 3.5.2.3.
3.3.2 Direct-drive
Direct-drive systems allow the generator to be directly coupled to the blades of a wind
turbine, with the low mechanical speed stepped up to a higher electrical frequency through
the use of a high pole number generator. The removal of the gearbox can increase the
physical shaft stiffness significantly, whilst the effective inertia of the system is reduced.
These two factors tend to increase the mechanical resonant frequency of the shafts of
direct-drive wind turbines. However, opposing this improvement in the stability of the
shaft system, Akhmatov [51] has shown that the shaft stiffness is effectively reduced by
the pole number of the generator, such that smaller mechanical oscillations are amplified
by the electrical system.
Parameter Geared Direct-Drive Blade Inertia (Jblade) (kgm2) 2.5 x 107 2.5 x 107
Generator Inertia (Jgen’) (kgm2) 200 90000 Gearbox ratio (ngear) 120 1
Effective Inertia (kgm2) '2
111
gengearbladeeffJnJJ ⋅
+= 2.6 x 106 89700
Shaft Stiffness (Kshaft) (Nm/rad) 3 x 108 1.3 x 109
Generator’s number of pole pairs 2 60
Mechanical Resonant Frequency eff
shaft
resJ
Kf ⋅
⋅=
π2
1 1.7 19

- 42 -
Table 3.1: Comparison of Geared and Direct-drive Shaft Parameters (Approximate to protect
commercial sensitivity)
Table 3.1 shows a comparison of the mechanical parameters of the shaft systems of a
geared and a direct drive generator, both machines are rated identically, with a multi-MW
rating. Despite the lower inertia of the low pole number generator, compared to that of the
multi-pole generator, the high gearing ratio leads to an effectively higher inertia for the
geared shaft than for the direct-drive shaft, as the geared generator’s inertia is referred to
the low speed side (a ratio of ngear2). Further, the geared shaft has significantly lower shaft
stiffness. It can be seen that this leads the mechanical resonant frequency of the direct
drive shaft to be an order of magnitude higher than that of the geared shaft. However,
according to Akhmatov’s work, it is important still to represent the shaft system with a
second order model in direct-drive models, owing to the amplifying effect of the
generator’s high pole number.
3.4 Electrical System
The mechanical shaft system model includes a representation of the generator’s rotor
inertia. The output of this mechanical model drives the generator at a set rotational speed
whilst the generator exerts an electrical torque on the mechanical shaft model. Section
2.4.1.4 highlighted that three different full converter configurations are possible,
consisting of induction generators and both electrically excited and permanent magnet
synchronous generators. The trends in wind turbine configuration, alongside GE Energy’s
Power Conversion business’s experience and commercial involvement, have led this work
to concentrate on the FFIG and FFPMG.
3.4.1 Park and Clarke’s Transforms
Much of the analysis and control of three phase rotating machinery depends on the ability
to transform the three phase vectors into an equivalent stationary two axis form (Clarke’s
transform) or an equivalent synchronously rotating two axis reference frame (Park’s
transform), this derivation is based on Adkins and Harley [52]. These are introduced here
as they underpin much of the subsequent analysis of both induction machines and
permanent magnet machines. Clarke’s method transforms the ABC three phase system
into an αβγ reference frame. The α axis is typically aligned with the A phase, with the β
axis lagging by 90°, the γ axis is then analogous to an unbalanced DC offset to this pair,
which for simplicity means it is zero for balanced systems. Figure 3.5 shows the
relationship of these axes. The transform can then be derived by resolving the components
of the ABC system into α and β components. First consider the α component:

- 43 -
Equation 3.15 ( )
−
⋅+⋅⋅+
−
⋅−⋅⋅+−⋅⋅= δ
πωδ
πωδωα 3
2cosˆ
3
2cosˆcosˆ tItItII
Equation 3.16 ( )
−
⋅+⋅⋅+
−
⋅−⋅⋅+−⋅⋅= δ
πωδ
πωδωβ 3
2sinˆ
3
2sinˆsinˆ tItItII
Figure 3.5: Clarke’s Transform abc-αβγ
By aligning the α axis with phase A, the angle between the α axis and the A phase
becomes zero and the transform reduces in matrix form to (the factor of two thirds is from
conservation of power between the axes):
Equation 3.17
−
−−
⋅=
C
B
A
I
I
I
I
I
2
3
2
30
2
1
2
11
3
2
β
α
The inverse transform can be derived by inverting this and is given as:
Equation 3.18
−−
−=
β
α
I
I
I
I
I
C
B
A
2
3
2
12
3
2
101
Park’s transform is in many ways an extension of Clarke’s transform which aids with the
analysis of rotating machinery as it transforms the three phase equations onto a
synchronously rotating reference frame. This in turn allows the AC quantities to be
considered as DC components and controlled as such. This is shown in Figure 3.6, where
again the three phase system is considered balanced and the d axis is rotating
synchronously (speed, ω) at an angle, θ, to the A phase.
β
α
( )δω −⋅⋅= tIIA
cosˆ
−
⋅+⋅⋅= δ
πω
32
cosˆ tIIB
−
⋅−⋅⋅= δ
πω
3
2cosˆ tII
C

- 44 -
Once again the transform can be derived by resolving the components of the three phase
currents onto the dq axes.
Equation 3.19 ( )
⋅+⋅+
⋅−⋅+⋅=
3
2cos
3
2coscos
πθ
πθθ
CBAdIIII
Equation 3.20 ( )
⋅+⋅+
⋅−⋅+⋅=
3
2sin
3
2sinsin
πθ
πθθ
CBAqIIII
Figure 3.6: Park’s Transform αβγ to dq0
These transforms, when power is invariant, in matrix form are then given as:
Equation 3.21
( )
( )
+
−
+
−
⋅=
C
B
A
q
d
I
I
I
I
I
3
2sin
3
2sinsin
3
2cos
3
2coscos
3
2π
θπ
θθ
πθ
πθθ
The inverse transform can be derived by inverting this and is given as:
Equation 3.22
( ) ( )
+
+
−
−=
q
d
C
B
A
I
I
I
I
I
3
2sin
3
2cos
3
2sin
3
2cos
sincos
3
2
πθ
πθ
πθ
πθ
θθ
3.4.2 Induction Generator
Park’s transforms greatly help with the analysis of a squirrel cage induction machine.
Which can be considered with a reference frame rotating synchronously to machine speed
and the d axis aligned with rotor flux as is considered here.
The squirrel cage induction machine was originally the dominant generator technology in
fixed speed wind turbines. Hence, the upgrade path to develop a variable speed wind
turbine with FFIG is an appealing option. The equivalent circuit of the induction generator
is shown in Figure 3.7, with the magnetising branch resistance assumed infinite.
q d
( )δω −⋅⋅= tIIA
cosˆ
−
⋅+⋅⋅= δ
πω
32
cosˆ tIIB
−
⋅−⋅⋅= δ
πω
3
2cosˆ tII
C
θ ω

- 45 -
Figure 3.7: Induction Machine Equivalent Circuit (left) and Field Oriented Control (right)
It is desirable to be able to independently control the generator’s torque and flux in order
to achieve fast transient performance. With this aim Bose [53] provides a synopsis of the
current capabilities of vector control for induction machines and highlights the parallel
that can be drawn to a DC machine when an induction machine is controlled in a field
oriented manner, as in Figure 3.7. The fundamentals of this technique are outlined here.
Consider the current through and voltage across the magnetising and other branches:
Equation 3.23
m
Lrr
m
r
r
mqmdm
X
XIj
X
s
RI
IjII⋅
⋅+⋅
=⋅+=
Hence the rotor circuit current can be defined by considering the d-axis component:
Equation 3.24
r
mmd
r
mmd
rR
XIs
s
R
XII
⋅⋅=
⋅=
But by definition, Ir must be in the q-axis to be purely torque producing, therefore, the
total q-axis current is (by Kirchoff’s law):
Equation 3.25
m
Lr
r
mmd
r
mmd
m
Lrr
r
mmd
rmqqX
XR
XIs
R
XIs
X
XI
R
XIsIII
⋅⋅⋅
+⋅⋅
=⋅
+⋅⋅
=+=
This can be rearranged to give the q-axis stator current in terms of the magnetising branch
current:
Equation 3.26 ( )
rmd
r
Lrmmd
qTIs
R
XXIsI ⋅⋅⋅=
+⋅⋅= ω where the rotor time constant is
given by the equation ( )
r
Lrm
rR
LLT
+= . Furthermore, the d-axis stator current must equal
the d-axis magnetising branch current as Ir has been shown to be in the q-axis.
Iqs
Ids
ωe
Ψr_pk

- 46 -
Equation 3.27 mdd
II =
The real power and resistive losses in the rotor circuit can be derived by considering the
referred rotor resistance as a pure resistance (r
R ) in series with the torque producing
resistance (s
sR
r
−⋅1
) and considering the mechanical power to be equal to the three phase
electrical power.
Equation 3.28
−⋅
⋅⋅⋅=⋅=
s
sR
R
XIsTP
r
r
mmd
rq
13
2
ω
This simplifies to:
Equation 3.29 ( )r
mmd
rqR
XIssT
22
13⋅⋅
−⋅=⋅ω
And substituting for the rotor frequency (( )
p
sfr
−⋅⋅⋅=
12 πω , p is machine pole pairs):
Equation 3.30 ( ) ( ) ( )
r
mmd
qR
LIss
p
sfT
22
1312 ⋅⋅⋅
−⋅=−⋅⋅⋅
⋅ωπ
Equation 3.31
r
mmd
qR
LIspT
22
3⋅⋅⋅
⋅⋅=ω
Substituting in Imd from Equation 3.26 and recognising Equation 3.27, gives torque in
terms of the q and d-axis stator currents:
Equation 3.32
rm
m
qdqLL
LIIpT
+⋅⋅⋅=
2
3
Rearranging to give the q-axis current gives:
Equation 3.33 p
L
L
TI m
r
r
q
q⋅
+
⋅Ψ
=3
1
where dmr
IL ⋅=Ψ
Equation 3.26 taken together with Equation 3.33 shows how the induction machine can be
controlled in the manner of a DC machine, through independent control of d and q-axis
stator currents, where the d-axis is aligned with the rotating rotor flux vector. This
independent control of the torque and flux allows fast torque response to transients, but
also allows fine control over the rotor flux. This has the advantage that the field can be
weakened when the rotor speed is high so that the generator’s output voltage is lower, so

- 47 -
called “field weakening”. In a wind turbine application, where instantaneous gusts can
cause acceleration of the blades and generator, field weakening is a useful feature, as it
ensures that the voltage seen by the full converter can be kept within its voltage ratings
across a relatively wide speed range.
There are two drawbacks of the induction machine, however, first the machine must be
charged with the d-axis (magnetising) current even in relatively low winds. This can mean
that it is relatively inefficient at the light loads that are common in wind turbine
applications. Second, as blade diameters have increased, in order to maintain a constant
tip speed ratio, the blade rotational frequency has fallen. This reduction in blade rotational
frequency has necessitated increased gearbox ratios; which have come at the expense of
increasing gearbox torques.
3.4.3 Permanent Magnet Generator
The twin challenges of FFIG wind turbines’ poor low speed efficiency and gearbox
failures are two of the drivers behind many manufacturers developing Permanent Magnet
Generator based wind turbines. Troedson [54] finds that all of the top three wind turbine
manufacturers are developing new FFPMG based solutions, with part load efficiency,
reliability, maintainability and grid compatibility raised as the key advantages over
induction generator solutions.
As with the FFIG, it is desirable to independently control the torque on the PMG in a wind
turbine application. Figure 3.8 shows the equivalent circuit of the PMG alongside a vector
diagram which considers the PMG in the rotor flux oriented reference frame. Here a
multi-pole design with equal d and q-axis stator reactance is considered.
Figure 3.8: Permanent Magnet Generator Equivalent Circuit (left) and Vector Diagram (right)
Considering the rotor flux oriented reference frame of Figure 3.8, the real power can be
seen to be given by:
EInternal =
ω.Ψmag UStator
Ψmag
ωLiq
id = 0
iq
δ
iqR

- 48 -
Equation 3.34 δω cos2
3⋅⋅⋅=⋅=
StatorqUiTP This is equivalent to:
Equation 3.35 magq
iT Ψ⋅⋅⋅= ω2
3 (Ignoring the stator resistance)
Hence, the torque is directly controlled by the q-axis current in this reference frame.
Implementation of a non-zero d-axis current varies the q-axis stator voltage and allows
control over the total voltage seen by the power converter. However, in contrast to the
induction machine it cannot change the rotor flux (Ψmag), as this is fixed by the permanent
magnets. This means that as the machine tends to higher speeds, the open circuit voltage
of the permanent magnet generator will tend to increase linearly. The equations of the
PMG can be written to assess the voltages on the terminals of the PMG and converter.
These are shown in Equation 3.36 and Equation 3.37 and highlight the voltage
dependency on speed.
Equation 3.36 dt
dILLIRIU d
ssqdd⋅+⋅⋅−⋅= ω
Equation 3.37 dt
dILLIRIU
q
smagsdqq⋅+Ψ⋅+⋅⋅+⋅= ωω
The inability to field weaken is a limitation of the PMG in comparison to a conventional
induction or synchronous generator. It has led Michalke, Hansen and Hartkopf [55] to
consider what is the most appropriate reference frame for the control of a PMG in order to
minimise the risk of transient over-speeds causing excessive voltages which damage the
power converter. This problem has also led Li and Chen [56] to suggest optimising the
selection of PMGs based on their rated speed for specific wind speed sites.
3.4.4 Converter
The power converter for a modern wind turbine relies on the application of IGBT
technology. It has been in large part the technical and economic advancement of IGBT
devices that has enabled the widespread deployment of variable speed wind turbines.
Today most wind turbine converters are two level designs, incorporating six IGBT devices
per bridge, as shown in Figure 3.9. Each bridge can act as a passive three phase rectifier;
converting the three phase AC voltage to DC through the anti-parallel diode bridge, or as
an Active Front End (AFE) by switching the IGBTs to synthesise a three phase voltage
based on Pulse Width Modulation (PWM) of the DC voltage.
The generator AC voltage, which is usually Low Voltage (LV), below 690V according to
GE Energy [57], is actively rectified to DC by the machine bridge, which raises the DC

- 49 -
voltage above the peak of the AC waveform. This DC level is then inverted back to AC
again to connect into the grid at around 690V, before being stepped up by a transformer to
typical levels of 11kV or 33kV.
Figure 3.9: Two Level Power Converter
Portillo et al. [58] highlighted as early as 2006 that the continued advance in power
electronic component cost and performance was making 3 level power converters a
potentially better option for high power wind turbine applications. The increased number
of levels improves harmonics, raises the operating voltage and increases the efficiency of
the power converter. These advantages will continue the increase in power device count in
wind turbines.
In both two and three level converters, the switching frequency of the IGBTs is typically
over 1 kHz, with low order harmonics generally very low level. The modelling of a power
converter including switching cycles and devices is computationally demanding, all the
more so with increasing numbers of devices in the power converter.
Figure 3.10: Simplified Representation of the Power Converter
Given the high switching frequencies involved and the desire for a model that is effective
for power system studies, an idealised model using ideal voltage and current sources has
been used to represent the power converter. Figure 3.10 shows how this simplification is

- 50 -
achieved with power balances between ideal three phase AC voltage systems and ideal
current sources on the DC link. The use of ideal current sources feeding the DC link
allows any major disturbances in DC link voltage to be observed.
In the real converter, the DC link applies a natural limit to the AC side voltages that can
be generated by the IGBT bridges as the peak of the AC waveform cannot exceed the DC
voltage. However, this natural limit must be replaced by synthetic modulation depth limits
in the control layer that take into account the voltage on the DC link and consequently
limit the maximum AC voltage. Furthermore, the passive three phase rectifier of the anti-
parallel diodes is not represented, meaning that this representation is not appropriate for
converter start-up studies, where DC link precharge is necessary.
Figure 3.11: Network Bridge Equivalent Output Circuit (left) and Vector Diagram (right)
The network bridge can be controlled in a synchronous reference frame as with the PMG.
Figure 3.11 shows how the control of the bridge voltage magnitude and phase controls the
d and q-axis currents, which in turn set the network bridge’s real and reactive power
outputs.
3.4.4.1 Without Chopper
Under load large steps or severe voltage disturbances, transients on the AC sides of the
system can lead to increased DC link voltages. The peak allowable DC voltage is set by
the lower of the DC voltage rating of the IGBTs (which may differ between passive
rectification and active switching) and the capacitor’s voltage rating. The capacitor
typically has a time constant of just a few milliseconds and this voltage must not be
exceeded, hence high bandwidth control is necessary to ensure that the DC link voltage
stays within safe margins. The FFIG does not include or require the use of a DC link
chopper, in part because its ability to field weaken ensures generator side speed transients
can be protected against in isolation from the DC link.
Ugrid
Vbridge
RI
I
j.X.I
Iq
Id

- 51 -
3.4.4.2 DC Choppers and Brake Resistors
Figure 3.9 shows that it is possible to use an additional IGBT switch connecting a resistor
across the DC link. This allows power to be sent to the Dynamic Brake Resistor (DBR) in
the event of an over-voltage on the DC link. Typically such events are brief transients,
allowing the resistor to be rated at the kW level, whilst thermally absorbing occasional
transients in the MW level. Normally chopper control is a simple threshold controller,
where the IGBT is switched on as soon as the voltage exceeds a preset level. Figure 3.10
shows that the chopper has been modelled in the simplified model as an anti-parallel
current source drawing current from the capacitor in the event of a DC link over voltage.
3.5 Control System
Three layers of control exist within a typical wind farm, with the wind farm controller
providing set points to the wind turbine controller, which in turn provides set points to the
turbine’s power converter. This section covers the implementation of these controllers.
3.5.1 Converter
In 2009, Hansen and Michalke [59] proposed two possible broad methods of controlling
the power converter of a wind turbine. What they proposed as a novel method was in fact
the method that had already been deployed to meet the rigours of grid codes in GE
Energy’s power converters. The control scheme that is classified as a ‘classical’ control
scheme is outlined in section 3.5.1.1 whilst section 3.5.1.2 covers the method used in most
of GE Energy’s Power Conversion business’ wind turbine converters.
3.5.1.1 Conventional Control Scheme
Figure 3.12 shows the conventional method of controlling a power converter as
implemented in the wind turbine model. The machine side bridge, which acts as a
rectifier, receives two set points. One set point controls the torque by controlling the q-
axis current in accordance with either the PMG or the Induction machine vector control
(note an unusual convention is used for dq axes in GE Energy’s Power Conversion
business). A second reference for either the flux or the maximum stator voltage is used as
the set point for the d-axis current and controls the machine’s magnetisation and
ultimately the voltage which is seen at the power converter terminals.
Two set points are also provided to the network bridge, one for the AC supply voltage
(shown), power factor or reactive power output (both not shown), this set-point is attained
by means of a Proportional-Integral (PI) controller setting the d-axis current reference. A
second reference is the target DC link voltage. The machine bridge pushes power onto the

- 52 -
DC link according to the machine’s speed and the torque set point. The network bridge
responds through a PI regulator which sees an increase in machine power as an increase
DC link voltage and controls the network bridge’s q-axis current reference so as to
increase power output to the grid.
Figure 3.12: Basic Conventional Power Converter Control Strategy
This cascade control scheme uses fast inner current controllers, which control the d and q-
axis voltages to ensure that the d and q-axis currents follow their set points. Also of note
from the control scheme, the grid angle and frequency are tracked by a Phase Locked
Loop (PLL), which acts to ensure the network bridge’s dq reference frame is synchronous
to the grid. The modulation depth limits incorporated into the control scheme compensate
for the use of ideal voltage sources in place of IGBT switch models.
Figure 3.13: Control Block diagram for the DC link

- 53 -
Seok, Lee and Lee [60] have developed tuning techniques for a permanent magnet
generator’s converter which incorporates a neat method of automatically setting the gain
for a PI controller where the plant is an integrator. Their method can be applied to the DC
link voltage controller to automatically set the PI controller gains here.
Figure 3.13 shows the block diagram, and if the current controller is assumed to have a
very high bandwidth, relative to the DC link voltage controller, its phase delay and gain
can be ignored. Hence an approximate open loop transfer function can be seen to be:
Equation 3.38 ( )2
1
sC
KsK
sCs
KKsG
dc
ip
dc
i
p⋅
+⋅=
⋅⋅
+=
Now if we desire a DC link controller bandwidth of ω rad/s at the gain cross-over point
the phase margin (φ ) can be considered (Bandwidth and Phase Margin Assignment
Method):
Equation 3.39 )tan(φω
=⋅
i
p
K
K
Equation 3.40 ( )
124
22
=⋅
+⋅
dc
ip
C
KK
ω
ω
Now the proportional gain can be substituted for in Equation 3.40 by rearranging Equation
3.39 to give:
Equation 3.41 24
22
24
2
2
))(tan1(1
)tan(
dc
i
dc
i
i
C
K
C
KK
⋅
+==
⋅
+
⋅
⋅
ω
φ
ω
ωω
φ
So rearranging Equation 3.41 allows the integral gain to be assigned by selection of an
appropriate phase margin and then the proportional gain can be found from Equation 3.39.
Equation 3.42 ))(tan1( 2
2
φ
ω
+
⋅= dc
i
CK
Automatic tuning of the DC link controller provides benefits when setting up new variants
of the wind turbine power converter models as it is the DC link which couples the two
IGBT bridges. Therefore, automatic gain setting to ensure that the DC link voltage
controller has reasonable stability and hence allows the other controllers to be tuned
without interference from the modulation depth limit.
3.5.1.2 Reversed Control Scheme
The classical converter control scheme suffers from two shortcomings, first the network
bridge’s control over the DC link voltage is not ideal for a generating application. The

- 54 -
tendency is for grid transients to lead to the DC link controller running into current limits.
This in turn can cause the DC link voltage to increase as the machine bridge continues to
generate into the DC link. The second shortcoming is a commercial block, in that General
Electric historically held a US patent by Richardson and Erdman [61] on torque
controlling an induction machine with vector control. Hence, Converteam UK Ltd., prior
to being taken over by General Electric, developed a control scheme patented by Jones et
al. [62], that avoided this patent but relied on DC link control on the machine bridge.
Figure 3.14: Alternative Power Converter Control Strategy
Under this alternative control strategy, the DC link voltage is used to set the machine
bridge’s q-axis current reference, thereby indirectly controlling the generator’s torque in
order to maintain a constant DC link voltage. The network bridge is provided with a
power set point which sets the network bridge’s q-axis current reference. Hence, power is
drawn off the DC link and the DC link controller responds by increasing the generator’s
torque. This method has the advantage that it makes it simpler to control a converter to

- 55 -
avoid the need for a chopper and DBR. Figure 3.14 shows the overall control strategy of
the power converter under this scheme.
The challenge with this control scheme is that it requires a power set point rather than a
generator torque set point. This is a slight difference from classical wind turbine controller
reference setting, but has the advantage that it ultimately leads to power output
optimisation from the machine to the grid, rather than purely of the machine and machine
bridge.
Whichever control strategy is selected, it must interface to the wind turbine controller
which provides two of the power converter set points. Whereas the DC link voltage and
maximum generator side voltage are for the power converter supplier to control, it is
desirable for the wind turbine to control the real and reactive power to the grid.
3.5.2 Wind Turbine
The wind turbine controller interfaces with the power converter controller by setting the
converter’s real power output reference and either a voltage set point, power factor or a
reactive power set point. The wind turbine controller may receive a signal from the power
converter during a grid fault, to indicate a loss of power output.
The aims of the wind turbine controller are broadly two-fold, first to maximise the energy
yield of the turbine and second to ensure the speed of the turbine and the structural loads
exerted on the turbine stay within design limits. Section 3.2.2 showed that the optimal
coefficient of performance is achieved at a single ratio between the tip speed and the wind
speed. Hence, under turbulent wind conditions, the rotational speed of the turbine would
have to continuously vary to optimise the power capture and energy yield.
There are two possible approaches to optimising the energy yield which are covered in
Camblong et al. [63]: “Indirect Speed Control” and “Direct Speed Control”. The direct
approach is shown to be more flexible to follow the optimal rotational speed as it is not
restricted by the inertia of the turbine. Whilst they recommend the direct approach, they
also acknowledge the higher torque and electrical power oscillations that result.
3.5.2.1 Indirect Speed Control
Leithead and Connor [64] illustrate that there is no such thing as a single wind speed, for
use in the turbine controller, as the wind varies across the swept area of the blades. Hence,
it is not possible to optimise the turbine through use of a wind speed input. Further, they
highlight four goals for the wind turbine controller, which are summarised here:

- 56 -
• Limit mechanical loads
• Limit and smooth power output
• Damping the shaft system
• Optimising power capture and hence energy yield
They highlight the dynamic stability of a controller that tracks the optimal coefficient of
performance by controlling the torque to follow the optimal Cp curve. Whilst Leithead
and Connor propose complex controllers that are ideal for tracking the maximum power
point, for power system applications these can be approximated with a look-up table
defining either the generator torque or power dependent on the rotor speed of the turbine.
Such a look-up table is graphically illustrated in Figure 3.15. Stability can be intuitively
understood as follows; an increase in wind speed causes an increase in aerodynamic
torque, which in turn accelerates the blades. The higher rotational speed of the blades
leads to an increase in the power reference (from A to B) sent to the power converter. This
increase in power reference leads to an increase in the electrical torque to counteract the
increased aerodynamic torque and hence stable operation at a new, higher operating speed
and output power.
Figure 3.15: Rotor speed to power look-up table
This approach to optimising the energy yield of the turbine implicitly helps to smooth
structural loads; sudden generator torque steps are avoided and gusts and lulls in the wind
speed are filtered by the blades’ inertia, resulting in only small changes in the rotor speed
of the blades. However, the inherent use of the blades’ inertia means that the optimal Cp
Increased wind speed Increased rotor speed Increased power reference

- 57 -
curve can only be tracked slowly, resulting in lower than optimal yield particularly in
turbulent wind conditions.
This maximum power tracking method achieves a good trade-off between optimising the
turbine’s energy yield and minimising the structural loads. It is therefore a reasonable
approximation to the conventional choice for a full converter wind turbine application.
3.5.2.2 Direct Speed Control
Burton et al. [65] have highlighted that closer tracking of the optimal Cp curve than
Indirect Speed Control permits could allow an increase in the energy yield of a wind
turbine by around 1-3%. This is a sufficient incentive that a new entrant to the wind
turbine market proposed using a direct method of controlling the wind turbine’s speed in
2009. This method is described here.
Figure 3.16 provides an overview of the salient features of the controller. A key feature is
the measurement of output power to the grid and the subsequent setting of a new speed set
point based on this, which is a reversal of the indirect method. The pitch controller
therefore has to act to limit power output and the turbine controller provides a speed
reference to the machine side converter.
Figure 3.16: Direct Speed Control Overview
The speed set point is set according to an adaptive algorithm that can be seen in Figure
3.17. Essentially, if the power output increases when the speed reference has been
increased then the controller sets a new higher speed reference until such a time as the
power output decreases. This results in a ‘hill-climbing’ controller. Conversely, if the
power output decreased when the speed reference had been increased then the controller

- 58 -
would set a new lower speed reference. By this means the controller should always look to
maintain the optimal speed and therefore the optimal Cp.
Figure 3.17: Direct Speed Controller (A hill climbing approach)
As the direct speed control method results in a speed reference output, it is necessary to
implement a speed controller in order to give a torque reference output to interface with
the drive controller. It is the dynamic performance of this speed controller, rather than the
rotational inertia, which sets limits on how closely the optimal Cp point is tracked in
turbulent wind conditions. A simple PI controller is the traditional means of providing
speed control and this gives a torque reference which is modified by the maximum and
minimum torque limits. The maximum torque is set by the limit on the drive train torque,
whilst the minimum torque is likely to be zero or more as it would be unacceptable to
motor the blades.
Figure 3.18: Direct Speed Control Torque Swings
Figure 3.18 illustrates the key challenge with direct speed control. Following a sudden
increase in the wind speed there could be a significant torque transient, potentially to zero
torque, whilst the blades accelerate to the new optimal speed. Given that the blades cannot
be motored and the allowable torque is limited, the high inertia of the blades means that
the controller can take a significant period of time to reach the new optimal point. The
torque swings associated with keeping the wind turbine operating at the optimal Cp point

- 59 -
lead to unnecessary wear and tear on the drive train and difficulty achieving the
theoretical gains from this strategy.
3.5.2.3 Shaft System Damping
Section 3.3 highlighted that wind turbines can have natural resonant modes between the
shaft and the generator that can become unstable in variable speed applications owing to
the loss of the grid’s stabilising effect. This necessitates active damping of the shaft,
which can be achieved in three ways:
• Use of the pitch controller to aerodynamically damp the speed oscillations of the
blade. This is limited by the rate at which the pitch actuators can adjust the blades
and consequently is the least effective method according to Muyeen et al. [66].
• Add a damping term directly to the torque controller of the machine bridge. This is
rapid and effective according to Hansen and Michalke [50] but requires the
oscillation energy to be stored in the DC link of the converter. This oscillation
energy results in higher voltages on the DC link and would necessitate a higher
rated and more expensive capacitor.
• The third option is to add a damping term to the converter’s power reference; this
method has also been shown to be effective but has the side effect of causing a
degree of ripple in the power to the grid whenever the mechanical mode is excited.
The third option is the preferred option here as it has the lowest impact on the design
requirements for the power converter and wind turbine. It can be implemented by
augmenting the power reference derived from the wind turbine’s maximum power
tracking algorithm and using a damping controller that is similar in structure to that
proposed by Hansen and Michalke. This is shown in Figure 3.19, however, it should be
noted that the phase delay due to the machine bridge DC link control of the power
converter makes the phase lag greater than that seen by Hansen and Michalke’s controller,
necessitating careful tuning of the phase compensator.
Figure 3.19: Shaft Damping Controller Added to Maximum Power Tracker
3.5.2.4 Pitch Angle Control

- 60 -
Figure 3.1 and Figure 3.16 highlighted the need for pitch angle control of the wind
turbine’s blades in order to limit the speed and power output of the turbine respectively.
The representation of the pitch controller used here ignores the fine tuning of pitch angle
that occurs to optimise Cp in below rated wind speeds. For the power system models
developed here, it is appropriate to concentrate on the primary function of the controller:
limiting power or blade speed in above rated wind conditions. As the focus is on large,
full converter wind turbines, the pitch strategy considered here is pitch-to-feather owing to
the high structural loads that a pitch-to-stall strategy would incur and the more common
deployment of pitch-to-feather according to Muljadi and Butterfield [67].
Bossanyi [68] has shown that modern large scale wind turbines have complex pitch
controllers fulfilling multiple objectives, including smoothing out tower shadow torque
pulsations using individual blade pitch angle control. For the purposes of representing the
electrical characteristics of a wind turbine it is not necessary to model the pitch controller
in such detail, however, it should be noted that the representation of the pitch controller
used in this work is a significant simplification compared to a full controller.
A standard PI controller can be augmented with anti-wind-up control to account for the
physical limit on the extent and rate at which the blades can pitch. Muljadi and Butterfield
have also shown that slower pitch systems of 4°/s experience significant speed
fluctuations and hence wind-up, whilst faster systems (they consider 8°/s) can lead to
significantly smoother output. Figure 3.20 shows the key elements of the pitch controller.
It can be noted that the modelled pitch controller does not act when the rotor speed is
below the rated rotor speed. Thereafter, the pitch angle increases to bring the turbine
speed back to target.
Figure 3.20: Pitch Controller for Indirect Speed Controlled turbine
3.5.3 Wind Farm
The wind turbine’s controller is responsible for optimising the power output and
behaviour of the wind turbine by controlling the pitch of the turbine’s blades and the set
points of the power converter. In individual installations or small wind farms this is

- 61 -
sufficient functionality to operate, however, Christiansen [69] has shown the complexity
involved in larger scale offshore wind farms which are captured by the requirements of
Grid Codes. Under large scale schemes it is necessary to have some control of the
individual turbines centrally in order for the wind farm to operate in the manner of a
conventional power plant.
Gjengedal [70] has detailed fourteen different means by which centralised wind farm
control may be necessary in order to replicate the behaviour of conventional plant. These
reasons may be summarised as:
• Reactive power control for voltage stability and variable power factor operation in
steady state.
• Reactive power control to feed fault current contributions in transient states.
• Real power control to meet ramping and maximum power limits in steady state.
• Real power control to meet frequency control requirements under transient states.
• Black start and islanding control.
Such control can be implemented by communicating with the individual wind turbine
controllers and acting as a system aggregator. Banham-Hall et al. [71] have shown a
typical scheme where the wind turbines provide the central wind farm controller with a
measure of their individual available power. The central controller then dispatches real
power and voltage operating points to the individual wind turbines. This ensures that the
wind farm operates as a single power plant to meet the requirements of modern Grid
Codes, which will be discussed further in chapter 4.
Figure 3.21 considers the case where frequency is centrally controlled, with power set-
points sent to each individual turbine. Conversely, the voltage (potentially reactive power
or power factor) is controlled locally to the turbines. However, this combination is not
unique, alternatively the frequency controller could exist at each turbine, with a central
supervisor; or else the control of voltage could be exercised centrally, with a reactive
current demand dispatched to each turbine. Overall, however, the central controller has to
maintain a supervisory function.

- 62 -
Figure 3.21: Wind Farm Controller, aggregating wind turbine availability and dispatching real and
reactive power or voltage set-points to the individual turbines
3.6 Software
3.6.1 Matlab-Simulink
Matlab-Simulink is an ideal environment for development of control systems and single
wind turbine models. Iov et al. [72] have released a standard library for wind turbine
modelling, however, this was developed in the era before the prominence of full converter
wind turbines and hence focussed largely on DFIGs and FSIGs. Further, the power
converter control systems deployed were not in keeping with the control system used in
GE Energy’s converter. The library is also restricted to academic and non-commercial
use, hence whilst it has provided useful insights, new blocks and models have been
developed.
GE Energy use Matlab-Simulink for modelling of the full converter, importing the drive
code and wrapping it in s-functions. This modelling includes switching patterns, full
internal drive features, such as alarms and protection, and full modelling of the DC link.
This model is appropriate for short time scale studies that require absolute detail, such as
fault ride-through modelling of single turbines. However, at the outset of this project the
simulation times associated with this model were of the order of an hour per fault ride-
through study. This demonstrated that it was unfeasibly complex for longer time-scale
studies or for multiple turbine studies.

- 63 -
This project has therefore developed a suite of models for use in multiple turbine or longer
time-scale studies. These models have in common that they are full converter type wind
turbines, but beyond that incorporate different generators, shaft topologies, converter
control strategies and maximum power point tracking methods. The range of different
models is summarised in Table 3.2.
As can be seen from Table 3.2, the variety of models developed allows comparison
between many of the different control techniques and technologies deployed with full
converter wind turbines. Often wind turbines with full converters are classified as a single
type, this work reveals the variety that can exist within type 4 wind turbines and highlights
the risk of assuming generic properties of full converter wind turbines without
understanding the underlying technologies.
Model
Number
Capacity
(MW)
Geared Generator
Type
Converter
Voltage (V)
DC Link
Chopper
and DBR
Converter
Control
Strategy
Turbine
Speed
Control
1 2.3 Yes Induction 690 No Reversed Indirect
2 3.6 Yes Induction 690 No Reversed Indirect
3 3.3 Yes Permanent Magnet
690 Yes Reversed Indirect
4 3.0 No Permanent Magnet
900 Yes Conventional Direct
5 3.0 No Permanent Magnet
900 Yes Reversed Indirect
6 Variable Either N/A 690 Yes Reversed Indirect
Table 3.2: Matlab-Simulink Wind Turbine Models Developed
3.6.2 DIgSILENT PowerFactory
Matlab-Simulink does not lend itself to studies of a wind farm’s interaction with the wider
power system and grid connection studies. DIgSILENT PowerFactory is fast becoming
the standard industry tool for transmission system studies and for analysing the impact of
integration of renewable energy into the power grid. National Grid is currently
transferring their in-house modelling capability onto DIgSILENT. As such it was
appropriate to ensure that the modelling capability in Matlab-Simulink was transferred
into PowerFactory for analysis of larger wind farms and integration with the power
system.
Hansen et al. [73] have released a description of wind turbine models in PowerFactory.
However, it suffers from the same restrictions and limitations as the Matlab library.
Therefore, a new model of a full converter wind turbine has been developed in

- 64 -
PowerFactory. As the use of the model was geared towards power system application, this
model is a generic full converter model in the same style as model 6 from the Matlab-
Simulink suite. Further details of this model are given in section 4.2.6. The DigSilent
PowerFactory model, whilst introduced and validated here, is only extensively used in
chapter 7 where larger systems and longer timescales are considered.
3.7 Validation
Validation of wind turbine models is critical to ensuring the reliability of any studies
based on them. Transmission system operators have increasingly required provision of
validated wind turbine and wind farm models for use in their power system studies. This
has increased the formality of model validation and led Martin, Purellku and Gehlhaar
[74] to develop and present software which conducts a formal validation analysis on wind
turbine site and model data.
Amongst wind turbine manufacturers, model validation is rigorous but less formalised,
typically relying on comparing the outputs from network related fault ride-through events
with modelled predictions. Nielsen et al. [75] have shown how this typically relies on the
use of data from a fault ride-through test facility and involves complete faults with 0%
retained volts and partial faults with retained voltage above zero. As the manufacturers’
models are for application in wider power system modelling, the relevant parameters are
typically:
• Voltage at the turbine terminals.
• Real power exported to the grid.
• Reactive power exported to the grid.
• d and q-axis current to the grid.
• Speed of the wind turbine.
The models developed as part of this EngD are used for power system studies and hence
this level of validation is applicable. However, they are also used internally for addressing
the impact of the wind turbine’s operation on the generator and power converter system.
This additional use is particularly true for the Permanent Magnet Generator wind turbine
models where much of the use of the models has been geared towards design impacts for
prototype systems. Hence the validation process applied to the models developed as part
of this EngD has been two-fold; first, where possible individual subsystem models (for
example the drive train) have been validated independently. Second, a complete wind

- 65 -
turbine model of an FFIG has been validated against site data in the manner previously
described by Nielsen et al. The individual subsystem validation is covered in this section,
whilst the second stage grid fault ride-through validation is included in section 4.2.3,
following the detailing of grid fault ride-through control and modelling.
3.7.1 Wind Model
The adaption to the wind model presented by Sorenson has been compared to the released
model in the Matlab-Simulink library from Aalborg University [72]. The comparison of
the power spectral density functions and two time series from the different models can be
seen in Figure 3.22 and Figure 3.23.
Figure 3.22: Wind Speed Time Series Comparison (Top: Developed model, Bottom: Aalborg Model)
The time series comparison confirms that the fundamental component of turbulence
associated with wind peaks and troughs has been exaggerated in the developed model.
This brings the developed model into line with the IEC 61400 standard [44] for extreme
events and is therefore appropriate for individual extreme loadings, but is less
representative of real wind farm conditions. This was desirable for assessing extreme

- 66 -
speeds of PMGs as a result of gusts and turbulence and consequently to assess peak
voltages experienced by the machine side rectifier under open circuit conditions.
Comparing the power spectral density functions of Figure 3.23 illustrates that the
developed model has a higher power spectral density at low frequency, leading to the
higher 0p fluctuations. The 3p component is still clearly in evidence in the developed
model, but with a slightly narrower peak.
Overall, the developed wind model is appropriate for investigating individual turbine
behaviour under extreme conditions. This is particularly true when considering the
variation in wind power available over periods of seconds to minutes as is the case when
assessing worst case peak speeds and voltages of PMG based wind turbines. When
considering whole wind farms, the Horns Rev actual output data is more applicable.
Figure 3.23: Wind Model Power Spectral Density Function Comparison (Top: Developed model,
Bottom: Aalborg Model)
3.7.2 Shaft Model
The shaft model has been validated against data provided from a customer’s higher order
wind turbine direct-drive PMG shaft model. Figure 3.24 shows a comparison between the
oscillations predicted by the developed second order shaft model and those of the higher
order shaft system. In both cases there is no active damping, so the resonance is a result of
free oscillations in the shaft, the only limit on the resonance is provided by the torque
limits of the generator. Being a direct-drive system, it also highlights the higher frequency
of oscillation that is possible with direct drive shafts.

- 67 -
From a mechanical system perspective, the internal shaft torque is the critical parameter as
this determines design loads. However, from a power system modelling perspective, the
generator’s oscillation is the critical parameter as this directly affects the model’s
electrical output. Both of these parameters show excellent agreement with the real data.
This provides confidence in the shaft model for a wider range of systems.
Figure 3.24: Generator, shaft and blade oscillations (Top) and model validation (Bottom)
3.7.3 PMG Model
GE Energy’s PMG designers’ provide a plot of expected volts against current at a specific
power factor, at rated speed for each PMG product. This is a steady state validation as it
excludes the effects of changing currents on terminal volts; however, it can provide partial
validation of the accuracy of the PMG model. Figure 3.25 shows the projected regulation
curve from the machine design for models 4 and 5 on the left, with the model’s measured
output on the right.
To generate this measured model plot also partially validates the PMG control
methodology as it relies on constant power factor control in a stator voltage oriented
reference frame. These measurements at all points are within 3% of that projected by the
machine designers. This is well within the error band of voltage for variation between
different machines. The magnets within PMGs can vary in strength leading to variations
in voltage between machines that are greater than the error margin in model accuracy.
Furthermore, the representation of the machine assumes that the magnets are operating at
their design temperature, as this can have a further significant impact on the internal EMF
and output voltage. One point to be aware of, however, is that the model slightly
underestimates the peak voltage of the PMG at this power factor (1.5%), illustrating the
need to keep a safe headroom margin for converter control.

- 68 -
Model Stator Voltage Against Current at Rated Speed
0
200
400
600
800
1000
1200
0 500 1000 1500 2000 2500Current (A)
Lin
e-L
ine
Volta
ge
(V
)
Figure 3.25: PMG Regulation plots from machine designers (left) and PMG model (right)
3.7.4 Converter Control
GE Energy has a 750kW test bench at their converter manufacturing facility with back to
back converters. This allows one converter to synthesise grid disturbances whilst the
response of the other converter can be measured. This has allowed the dynamic behaviour
of the network bridge to be validated against the test bench.
Figure 3.26: Converter Control Validation Plot
Figure 3.26 shows the results from the network bridge model and the test bench under a
voltage disturbance. The agreement between the model’s output and the test bench data is
excellent, demonstrating that the dynamic performance of the model is good. However,
this validation process does highlight the limitations of using a fundamental voltage
source model, with the magnitude of the fastest transients on the current controllers
underestimated. The fundamental voltage source model is limited by the bandwidth of the
current controllers to less than 200Hz. However, the switching frequency of the PWM

- 69 -
cycle would typically be around 1.0-2.5kHz. The underestimation in fast transients would
be a concern if the model were intended for detailed studies of the power converter,
however, for power system study use it is adequate as all transients of 10ms or longer are
well represented.
3.8 Summary
The key contribution of this chapter was the development of validated models of full
converter wind turbines, permitting wind to grid analysis.
This chapter has covered the development of a suite of full converter wind turbine models
in Matlab-Simulink, with a key model also created in DIgSILENT PowerFactory. It has
illustrated the diversity in technology and control techniques within this single class of
wind turbines. The sub-system models developed have been validated independently to
allow confidence in hybrid models using different model combinations.
Whilst the development of these models has depended on the existing literature, it has also
extended it. A new wind model, which is appropriate for extreme wind condition
scenarios has been developed, this allows assessment of the extreme speeds, leading to
extreme voltages that can be seen on generators. This is particularly crucial for PMGs,
where it has been shown that their inability to field weaken presents a design challenge
with regard to the stator and converter voltage levels. PMGs with direct-drive shafts are
also shown to have potentially higher frequency resonant mechanical modes than would
be the case with geared solutions.
The full converter induction generator has not been extensively covered by those
modelling full converter wind turbines, who typically focus on either conventional
synchronous generators or PMGs. These same modellers have historically focussed on
only conventional control of the back-to-back IGBT bridge, but here the modelling
includes the newer reversed control scheme, which provides benefits in generating
applications. The interface of this converter controller to the wind turbine controller is
also shown, owing to renewed commercial interest in applying direct speed control to
wind turbines in place of the classical indirect control scheme.
The suite of models is built on a fundamental voltage source representation of the
converter, which includes power balancing to replace the requirement to physically model
the devices and switching patterns. This allows the model to be more appropriate to
multiple turbine and longer time-scale studies.

- 70 -
4 Grid Connection of Full Converter Wind Turbines
4.1 Introduction
As the scale and number of large offshore wind farms increases, it is anticipated that
increasingly they will be connected directly to the GB transmission system, or possibly
even a European Super-grid. As such, it is important that these wind farms interact with
the power system in a manner that supports the grid’s stability. The approach that the GB
Grid Code has taken is one where all generation is required to fulfil a specific set of
technical requirements. Urdal and Horne [76] have shown that this approach is technology
neutral and encompasses much more than just Grid Fault Ride-through behaviour. They
have identified six key areas where Grid Codes impact on wind farm systems: “Fault Ride
Through (FRT), Reactive Range, Voltage Control, Frequency Range, Frequency Response
and Modelling”.
This chapter concentrates mainly on two key areas of Grid Code compliance. First, section
4.2 considers the GFR requirements and their impact on full converter wind turbines. It
begins with the FFIG, showing how field weakening can contribute to controlling machine
voltage during a fault. It also presents validation results from the derived model and site
tests. Section 3.4.3 highlighted that PMG rotor flux is essentially fixed, which places key
limits on a FFPMG’s ability to replicate this. This leads to new and specific challenges for
the FFPMG under GFR which are explored in more detail in section 4.2.4. Section 4.2.5
then contributes new control methods that allow the FFPMG to ride-through grid faults
with small choppers and dynamic brake resistors whilst also protecting the wind turbine
mechanical system.
Second, section 4.3 considers the frequency response requirements placed on wind farms
and the methods that wind farms can use to emulate the behaviour of conventional
generators. It specifically explores different methods of providing short term frequency
support and compares different control methods for providing response, extending
existing knowledge in this area. Section 4.4 then considers in detail the challenge of
providing very fast inertial response to rapid grid frequency changes and proposes new
control methods that provide a synthetic inertial response without taking the derivative of
grid frequency.

- 71 -
4.2 Grid Fault Ride-through
Grid faults may be caused by damage to lines causing single phase, two phase or three
phase faults either phase to phase or phase to ground. The most severe case is usually a
three-phase to ground fault, which may lead to a complete loss of a wind farm’s ability to
export power to the grid. It is important that under such faults the transmission system’s
protection devices operate as intended and that the system subsequently recovers stably.
As such Grid Codes have developed specific requirements on generators connected to the
transmission system to ensure the secure operation of the system.
The transient nature of grid faults typically leads to a thorough test both of the physical
wind turbine system, due to a step change in electrical and mechanical behaviour, and
wind turbine models, which try to predict the behaviour of a wind turbine under a specific
grid fault.
4.2.1 Grid Code Requirements
GFR requirements are typically specified in terms of an envelope of potential faults for
which a wind farm must stay connected to the system and transiently stable. The wind
farm usually classifies a voltage of less than 90% of nominal as a fault. Ausin, Gevers and
Andresen [77] have provided a worst case envelope from studying several different
nation’s Grid Codes, which is shown in Figure 4.1. The solid green region is the region for
which a wind farm must stay connected. In a worst case, this requires a wind farm to ride-
through a zero voltage fault lasting 180ms at the wind farm’s connection point.
Alternatively, a fault that led to a suppression of the voltage to 50% would require the
wind turbine to stay connected and transiently stable for up to 1.8s.
Figure 4.1: International Fault Ride-through Requirements Comparison according to Ausin, Gevers
and Andresen [77]

- 72 -
Section 2.5.2 showed that under a transient voltage suppression such as GFR a
synchronous machine would inherently provide a high reactive current output. This
reactive current output contributes to supporting the voltage at the machine’s terminals
and triggering any necessary protection devices. Hence, in addition to riding through the
fault, it is typical for Grid Codes to mandate that wind turbines output reactive power
according to their power converter’s current limit for the duration of the fault. This
necessitates a priority change for the power converter from outputting real power prior to
the fault to outputting reactive power during the fault and back to real power following
fault clearance and can contribute to significant mechanical load changes on the turbines.
Following the restoration of voltage to normal, national Grid Codes place different
requirements on generators depending on their system characteristics. The relatively
small, islanded system of the GB grid prioritises the restoration of real power in order to
avoid a subsequent frequency problem. This leads to a requirement on GB connected wind
farms to recover their real power output to within 90% of the pre-fault level within 0.5s of
system voltage recovering to within 90% of nominal according to National Grid [78].
Such a requirement effectively mandates a fast ramped increase in the wind turbine’s
output following a fault. Conversely, the large and interconnected Eon Netz system in
Germany prioritises the recovery and stabilisation of system voltage following a fault,
with reactive power taking priority for the first 500ms following fault clearance.
Furthermore, active power is only required to recover at a rate of 20%/s or faster [79]
which is much slower than the effective 180%/s rate that National Grid apply.
Typically wind turbines are designed to withstand the combined worst case scenario, such
that GFR performance is satisfactory for any market internationally.
4.2.2 Fully Fed Induction Generator
Under a severe grid fault the power output to the grid is instantaneously lost; however, the
aerodynamic input power to the blades is initially unchanged. Consequently, initially the
machine will tend to continue generating into the power converter’s DC link. Without
additional control, in the case of the conventional control strategy of section 3.5.1.1, this
would lead to the DC link voltage rising beyond its design rating. Conversely, under the
reversed strategy, outlined in section 3.5.1.2, the DC link voltage controller would reduce
the torque and hence power generated in response to the DC link voltage rise. However,
this response to a 100% step in output power may be too slow to stop excessive power in
feed to the DC link due to the limited energy storage capacity of the optimally sized
capacitors (which have a time constant of around 5ms).

- 73 -
Given the risk of over-voltage on the power converter’s DC link, the control strategy has
to be modified to protect the DC link capacitors. This is done by first calculating the real
current output capacity of the grid (Iq_lim) according to Equation 4.1, where the d-axis
current is set in line with the requirement of the relevant grid code according to Equation
4.2 (kGrid_Code is typically 1 to 1.5 in per unit terms). The current output limit and the
instantaneous fault voltage can then be used to estimate the power capacity of the grid
(Pff) in per unit, according to Equation 4.3. This power capacity then acts as a feed-
forward to the machine bridge, where it limits the power output of the machine and
improves the dynamic response of the converter to a grid fault (see Figure 4.2).
Equation 4.1 )( 22
lim_ dratingqIII −= Where Irating is the converter nominal rating.
Equation 4.2 )(_ VVkInomCodeGridd
−⋅= Where |Vnom| and |V| are the nominal grid voltage
and instantaneous faulted grid voltage magnitudes.
Equation 4.3 lim_2
3qff
IVP ⋅⋅=
Rapidly reducing the torque on the generator has a two-fold effect, first the machine
begins to accelerate as a result of the unrestrained torque from the blades. Second, the
torque step would be liable to excite the mechanical shaft resonance discussed in section
3.3. Hence, the GFR strategy leads to activation of the shaft damping controller discussed
in section 3.5.2.3 and blade acceleration may lead to activation of the pitch controller
discussed in section 3.5.2.4.
The typical pitch controller has a finite response time and a limited pitch rate, meaning
that it cannot instantaneously limit the acceleration of the turbine. Hence, the speed of the
generator will typically increase due to the slow blade acceleration and the transient
oscillations of the shaft. The field weakening strategy of the induction machine therefore
has to act to counteract the speed oscillations and to ensure that the consequent voltage
oscillations seen at the power converter terminals are within safe operating limits. The
vector control of the induction machine allows this to be achieved straightforwardly with a
stator voltage limiter modifying the d-axis current reference on the machine bridge, which
is shown in Figure 4.2.
The final modification to the steady-state control to provide for GFR is to switch from a
steady state voltage controller derived Id reference on the Network Bridge to that defined
in Equation 4.2, according to the instantaneous voltage and the relevant Grid Code. This

- 74 -
change in Id set-point is designed to ensure that the grid voltage support is activated
rapidly at the onset of a fault.
Figure 4.2: FFIG Reversed Converter Control for Fault Ride-through
4.2.3 Model Validation
The severity of GFR, combined with the fact that it activates many of the wind turbine
controllers and that there is a requirement for wind turbines to undergo GFR type testing
means that it provides ideal data for validation of complete wind turbine models. As such
Figure 4.3 and Figure 4.4 show the outputs from a large FFIG wind turbine undergoing
type testing against the GFR requirement. Under this specific test the turbine was
subjected to a three-phase to ground voltage fault with 50% retained voltage, lasting for
1.8s. This section discusses the degree of agreement between the models and the type tests
and identifies the causes for any differences.
Figure 4.3 shows the key parameters of the machine bridge under this GFR scenario. It
should be noted at the outset, that the large spike on Wr at the onset of the fault suggests
some high frequency noise coupled onto the measured site data, as clearly a speed change
such as this is non-physical.
The top sub-plot shows the rapid change in real power on the machine bridge that is
achieved as a result of the feed-forward power limit from the network bridge. The initial

- 75 -
spike in power prior to the fault is due to the demagnetisation of the converter’s main
reactor, whilst the spike at the point of fault recovery is due to the release of the power
limit and a transient as the DC link voltage controller recovers control. During the fault,
the full current capacity is deployed to fulfil the d-axis current requirement and then to
maximise real current output, within the limits of the converter. This means that the shaft
damping controller is inactive until the post-fault period, whereupon it superposes the
decaying sinusoidal damping term on the DC power level. The profile of the power plot
and damping show excellent agreement, with the only significant differences due to the
model’s simplified ideal voltage source behaviour not representing the fastest switching
dynamics.
The second to fifth sub-plots show the dq-axes’ set-point and feedback currents. The q-
axis plots show good agreement again between the modelled data and the site data, as well
as between the set-points and feed-back values. The q-axis, aligning with torque and
resulting from the DC link controller, closely follows the behaviour of the machine bridge
real power.
The d-axis currents show reasonable agreement between the site data and modelled data,
with the stator voltage limiter acting to sinusoidally modulate the flux in order to maintain
a smoother voltage output. This helps to ensure the q-axis current is also smoother.
However, there are two noteworthy differences in the d-axis current. First, the sinusoidal
component begins to loose synchronism between the modelled data and the site data
following the end of the fault. This is because of differences in the performance of the
damping controller between the ideal modelled case and the site case. The second
difference in the d-axis current can be seen on the peaks of the sinusoids with the model
showing a double peak in current for two periods following fault clearance. This is
because the q-axis current is given priority over the current limits following the fault and
the total current runs into the converter’s design limit at the peak of the Id curve; hence the
reference is reduced causing the double peak. This double peak is more pronounced than
the site data infers, and is largely due to the modelled damping controller superposing a
larger sinusoid on the q-axis current reference in the model than the site data, which in
turn leads to the faster damping discussed above. Overall, however, the model shows very
good agreement with the site current measurements.
The sixth sub-plot shows the DC link voltage. Here, the spike at the onset of the fault is
assumed to be noise in the measurement as further investigation has shown it appears and
disappears within a couple of switching cycles. With the exception of that spike, the plot

- 76 -
shows the success of the feed-forward power limit in maintaining the DC link voltage
within limits. Slight transients can be seen at the beginning and end of the fault, which are
larger on the site data than the model data, but the broad shape of the responses at these
points are similar.
Finally, the last sub-plot shows the generator speed, where the undamped shaft
oscillations can be seen to build up during the fault and then are damped down in the post
fault period. The unknown wind conditions of the site test led the turbine to initially be
operating slightly above rated speed and this is assumed to be the reason for the slight
steady state deceleration in the measured generator speed which is not replicated in the
model. However, this discrepancy is small and the mechanical oscillations due to the shaft
are seen to be in phase and similar in magnitude throughout the simulation.
Figure 4.3: FFIG Machine Bridge Fault Ride-through Validation Plot (Site data is shown in blue,
modelled predictions in red)

- 77 -
Figure 4.4 shows the key parameters for validating the network bridge model. The top
sub-plot shows the voltage profile for the fault, with the sharp fault edges indicating the
scale of challenge that GFR sets wind turbines. The fault is applied downstream of the
turbine transformer, with the top plot representing the measured voltages on the LV side.
Hence, the reactive power output of the converter ensures that the measured voltage is
slightly above the 50% retained voltage at the fault site. The simplified grid representation
used in the model means that the fast voltage oscillations on fault recovery do not
represent those of the network under site tests.
Figure 4.4: FFIG Network Bridge Fault Ride-through Validation Plot (Site data is shown in blue,
modelled predictions in red)
The second plot shows the power into the network during the grid fault, with the ramped
post-fault recovery of power evident, prior to the damping controller activating. The
agreement in power output levels, ramping rates and damping is good. It should be noted,

- 78 -
however, that the damping here reduces the power output below the 90% level 0.5s after
the fault is cleared, this test was not for GB grid code. This suggests that under GB grid
code, the damping contribution would either have to be reduced, or the interpretation of
the Grid Code relaxed slightly.
The third to sixth plots represent the converter current set-points and feedback values. The
magnitudes, ramp rates and oscillations are all broadly in agreement between the model
and the site data. It is noteworthy from here, however, that the q-axis current during the
fault is non-zero, being limited only by the d-axis current and converter current limits.
This means that at the point of voltage recovery, the q-axis current is discontinuous, with a
step decrease, in order that the output power (second plot) is continuous.
Overall, Figure 4.3 and Figure 4.4 show very good agreement between the site data and
the modelled data. This provides further confidence in the models derived in chapter 3.
This validation and verification process underpins much of the next section, as at the time
of writing, whilst GE Energy have equipped several PMGs which have been operating
since 2008, none have yet been type-tested against the GFR requirements. However, the
converter control, which represents the fastest dynamics, is only modified between the
two cases by changes to the machine bridge vector control. Hence, there is high
confidence that the models provide an adequate basis for investigating the FFPMG
further.
4.2.4 Fully Fed Permanent Magnet Generator
The following two sections of the thesis have been combined and written up as a peer
reviewed journal article in Wind Energy by Banham-Hall et. al. [80]. The new Chopper
control method is the subject of a patent application [81].
The validated wind turbine model deployed a FFIG with a reversed control scheme for the
power converter, whereby the machine bridge is responsible for the control of the DC
link. However, GE Energy’s Power Conversion business were approached in 2008 by a
company wishing to deploy Direct Speed Control of a PMG wind turbine (see section
3.5.2.2), which necessitated speed control on the machine bridge. This speed controller
feeds a torque reference to the vector controller of the machine bridge as seen in Figure
4.5. This necessitated a conventional power converter control strategy with DC link
voltage control on the network bridge.
Figure 4.5 shows the control strategy for GFR with a conventional converter control
strategy. The key difference to Figure 4.2 is in the formulation of the feed-forward that

- 79 -
acts to limit torque on the machine bridge. In the former case the feed-forward acted only
to accelerate the natural response of the DC link controller. However, with conventional
control the machine bridge’s natural response is to continue to generate according to the
torque reference whilst the DC link controller on the network bridge winds up. Without
additional control the torque reference would tend to eventually increase as and when the
turbine blades accelerate leaving the DC link voltage being pumped up by the generator
until the fault clears. To avoid this, the power feed-forward between the bridges is
modified. The grid power limit is calculated as Equation 4.1 to Equation 4.3 describe but
in addition, the wind up of the DC link controller is also used in the feed-forward so that
as it winds up the machine bridge power limit is reduced. This reduction in the machine
bridge power limit leads to a reduction in the power fed into the DC link and a subsequent
fall in the DC link voltage. As the DC link voltage falls the wind up is reduced and the
power limit is correspondingly reduced until a balance is reached between the two
bridges. Hence, responsibility for DC link control is shared between the two bridges
during the fault.
Figure 4.5: PMG Conventional Converter Control for Fault Ride-through
The GFR behaviour of the FFIG showed the benefits of true field weakening control over
the generator’s magnetic field. However, a PMG effectively has fixed rotor flux leading to

- 80 -
new challenges. Fernandez, Garcia and Jurado [82] have proposed that pseudo-field
weakening can still occur with a PMG using reactive power to change the voltage across
the stator winding reactance and this is true under normal conditions. The machine
bridge’s d-axis current can still act to reduce the terminal voltage of the PMG under
normal conditions. This is shown in Figure 4.6, ignoring the stator resistance. However,
the governing equations, repeated below, must be considered.
Figure 4.6: PMG Vector Diagram with Pseudo-Field Weakening
Equation 3.36 dt
dILLIRIU d
ssqdd⋅+⋅⋅−⋅= ω
Equation 3.37 dt
dILLIRIU
q
smagsdqq⋅+Ψ⋅+⋅⋅+⋅= ωω
Under normal operating conditions, the power converter maintains control over the PMG
current and can act as a four quadrant converter that sources or sinks reactive power to the
generator. However, following a converter trip, the IGBT devices inhibit switching and
the converter control over the reactive power exchange with the generator is lost. Current
flows into the DC link through the converter anti-parallel diodes whenever the peak of the
generator voltage exceeds the DC link voltage. Hence, the machine bridge acts as an
uncontrolled rectifier. This means that the generator will pump power into the DC link of
the converter until the DC voltage is high enough that the diode bridge becomes
continuously reverse biased. All currents are then zero, so that Equation 3.36 and
Equation 3.37 show the terminal voltage would then become equal to the open circuit
voltage of ω.Ψmag. Hence, any field weakening used to suppress the PMG voltage is lost
and voltage ultimately rises to the open circuit EMF.
In the FFIG field weakening was used to suppress the generator voltage when the
generator speed exceeded the nominal rating. However, the discussion above shows that
this is not sufficient to ensure the correct operation of the PMG, because in a trip situation
EInternal =
ω.Ψmag UStator
Ψmag
ωLiq
id ≠ 0
iq
δ
ωLid

- 81 -
the voltage would rise, rather than fall, and could cause an excessive voltage on the
converter terminals.
There are two further challenges for the FFPMG system when designing for GFR. First,
the higher mechanical resonant frequency of the shaft described in section 3.3.2 could lead
to high oscillatory over speeds shortly after the onset of the fault, this in turn would lead
to a rise in the open-circuit voltage of the PMG which could cause transients to exceed the
converter’s voltage rating. Second, the magnetic materials used to manufacture PMGs
have to be protected against excessive heat to ensure their magnetic performance.
Generator design protects against excessive heating from stator short circuits by using a
high stator reactance to limit short circuit currents. This means that the magnetic energy of
the stator windings must be considered during a GFR situation. Ultimately, as Equation
4.4 shows, this magnetic energy will be converted into electrostatic energy in the DC link
capacitor, hence this increase in DC link voltage must be considered for the GFR case.
Equation 4.4 [ ]( )222
2
1
2
1DCDCDCS
VVVCIL −∆+⋅⋅=⋅⋅
Expanding this gives:
Equation 4.5 ( )2222 2DCDCDCDCDCS
VVVVVCIL −∆+∆⋅⋅+⋅=⋅
Assuming the change in DC voltage is small compared to the absolute link voltage gives:
Equation 4.6 DCDCS
VVCIL ∆⋅⋅⋅≈⋅ 22
From which the change in link voltage can be found to be approximately:
Equation 4.7
DC
S
DCV
I
C
LV
2
2
1⋅⋅≈∆
Figure 4.7 shows the simulation of a three phase to earth fault with 0% retained voltage on
the MV side of the turbine transformer. The fault lasts for 140ms, which is the maximum
specified in GB Grid Code, before recovering. The grid power profile (Pgrid) sees a step
reduction at the onset of the fault, which is followed by a slower reduction in the
generator’s power (Pgen). The feed-forward demands a faster power reduction response
from the PMG than is achieved. This is due to the magnetic energy of the PMGs stator
reactance discussed above.
In order to rapidly reduce the current of the PMG there must be sufficient voltage margin
on the power converter to incur a high dI/dt as shown in Equation 3.36 and Equation 3.37.
However, the typical power converter design does not have sufficient margin on the
modulation depth of the DC link to achieve this, hence, the generator continues generating

- 82 -
into the DC link as the PMG current is reduced at the fastest rate the converter can
achieve. This increases the DC link voltage (Vdc) which in turn creates headroom for the
PMG voltage to increase (Vpmg). However, both the peak DC link voltage and the peak
PMG voltage are well beyond typical design limits here.
Figure 4.7: PMG Fault Ride-through without a Chopper or Brake Resistor
Despite the slow reduction in torque on the machine bridge, it is still sufficiently fast to
appear as a near-step change to the shaft system. This leads to the initiation of high
frequency speed oscillations of the generator. These fast oscillations are superposed onto a
slower acceleration of the generator as the blades increase speed through the fault.
Depending on the specific PMG design, these speeds must be designed to stay inside the
rated speed to ensure that the open circuit voltage of the PMG does not exceed the power
converter’s rating.
Banham-Hall et al. [83] have investigated the specific details of GFR with the FFPMG
and concluded that normally all direct-drive PMG would require a Chopper and DBR in

- 83 -
order to act both to avoid the mechanical shaft oscillations and to absorb the magnetic
energy stored in the PMG’s stator windings.
4.2.5 Choppers and Brake Resistors
4.2.5.1 Fully Rated
Conroy and Watson [84] have shown how the use of DBRs and choppers across the DC
link of a power converter can suppress otherwise excessive voltages. Their work compares
the case of a PMG with and without a fault resistor, but in each case the generator’s power
is unaffected through the fault, either pumping up the DC link voltage or being diverted to
the brake resistor.
Figure 4.8: Fault Ride-through of a PMG with Fully Rated Chopper
Michalke and Hansen [85] also consider choppers and brake resistors for PMG wind
turbines but focus specifically on their benefit in terms of avoiding exciting the shaft
resonance. The brake resistor sits across the DC link, switched in or out by an IGBT that

- 84 -
is triggered by a simple threshold controller. The threshold controller works such that the
IGBT is on whenever the DC link voltage exceeds a predefined level. The IGBT is then
switched off when the voltage falls below a second level, which is set to ensure some
hysteresis. This controller is shown to work well to avoid the mechanical shaft oscillations
that are present from a grid fault without a brake resistor.
Neither Michalke and Hansen nor Conroy and Watson consider the importance of brake
resistors to direct-drive PMG wind turbines in order to avoid generator over-voltages and
over-speeds. Furthermore, they model resistors that are rated sufficiently to absorb all the
generator energy during a fault. Figure 4.8 shows a simulation of the FFPMG model with
a full rating chopper and Dynamic Brake Resistor (DBR). The generator power (Pgen),
Speed (Wgen) and Voltage (Vpmg) can be seen to be generally unaffected by the grid
fault as the generator power is diverted by the chopper (Pchop) and dissipated as heat by
the brake resistor (DBR Energy).
The problem with using a full chopper and brake resistor is the total energy dissipation.
The resistor must be sized to absorb 0.25pu.s; which means it must be capable of heating
sufficiently to absorb full power output from the generator for ¼s for a zero voltage fault,
this in turn can extend to over 1s for a worst case fault of greater retained voltage but also
longer fault duration. The resistor does not have to be continuously rated for full power,
which would result in an unfeasibly large and expensive solution, but must be sufficiently
sized to survive worst case grid faults whilst absorbing energy as heat. This typically leads
to designs with a continuous rating of tens of kW. However, informal discussions around
Grid Codes have suggested that it may be necessary in future for turbines to ride-through
successive faults caused by auto-reclosure of faulted transmission lines. This would mean
that the DBR would have to be resized to allow ride-through of multiple faults within a
specified period as the under-rated resistors have long thermal time constants leading to
long cooling periods before they can be reused. This necessitates an increase in energy
rating, size and cost.
4.2.5.2 Partially Rated
The analysis of the PMG without a chopper showed that the voltage rise at the onset of the
fault is of key concern to the power electronic system. Additionally fast changes in torque
led to mechanical oscillations in the shaft system. However, use of a fully rated chopper
and brake resistor necessitates a relatively large resistor, which may in future need to be
increased to allow GFR of multiple faults. As an alternative to a fully rated chopper, it is

- 85 -
possible to consider using a partially rated chopper with ramped reduction in machine
torque; however, the ramp would ideally be designed to avoid mechanical resonance.
The mechanical response of the generator to a ramped change in torque can be found by
considering the blades fixed as in Figure 4.9. This is a reasonable approximation since the
blade inertia is typically more than an order of magnitude higher than the generator. As
the shaft damping is low, in a typical direct-drive application, this can be considered
negligible to simplify the mathematics further. Hence the differential equation governing
the angular response of the generator to applied torque is then given in Equation 4.8.
Figure 4.9: Simplified Shaft System
Equation 4.8 ( ) ( )tKtJtTshaftgen
θθ ⋅−⋅=⋅⋅
)(
Now the response of this system to a ramped reduction in torque can be found by setting
T(t) = Trated(t/tramp) where tramp sets the ramp rate.
Equation 4.9 ( ) ( )tKtJt
tTtT
shaftgen
ramp
ratedθθ ⋅−⋅=⋅=
⋅⋅
)(
The homogenous equation for this is then:
Equation 4.10
gen
shaft
J
Km −= 20 so that
n
gen
shaft
J
Km ω=±=
So the solution of the complementary function is given as (C1 and C2 are constants):
Equation 4.11 ( ) ( )tCtCnncf⋅⋅+⋅⋅= ωωθ cossin 21
Now try a particular integral of the form (A.t+B)
Equation 4.12 BtApi
+⋅=θ
By comparing coefficients:
Equation 4.13 ( )BtAJ
K
t
t
J
T
gen
shaft
rampgen
rated +⋅⋅=⋅ AtK
T
rampshaft
rated =⋅
− and B=0
So the overall response of the shaft to an infinite ramp is given as:
Equation 4.14 ( ) ( ) ( ) ttK
TtCtCt
rampshaft
rated
nn⋅
⋅−⋅⋅+⋅⋅= ωωθ cossin 21
Now considering that at t = 0, θ = 0 gives that C2 = 0 as all other terms would be zero.
Jgen
Kshaft θ, dθ/dt, d2θ/dt2

- 86 -
Then consider that at t = 0, dθ/dt = 0:
Equation 4.15 ( )rampshaft
rated
nntK
TC
⋅−⋅⋅⋅= 0cos0 1 ωω so that
rampshaftn
rated
tK
TC
⋅⋅=
ω1
Hence the general solution giving the response of the shaft to an infinite ramp in torque is
given as:
Equation 4.16 ( )
−⋅⋅⋅
⋅= tt
tK
Tn
nrampshaft
rated ωω
θ sin1
In order to find the response of the shaft to a finite ramped-step function, it is possible to
consider two opposing ramp functions offset in time as shown in Figure 4.10. Hence, the
solutions to the two opposing ramps can be superposed.
Figure 4.10: Composition of a Ramped-Step Function
Equation 4.17 [ ]( ) [ ]
−−−⋅⋅⋅
⋅
−=
ramprampn
nrampshaft
rated tttttK
Tω
ωθ sin
12
Hence, the overall response is given as:
Equation 4.18 ( ) [ ]( )
−−⋅−⋅⋅⋅
⋅=
ramprampnn
nrampshaft
rated
Ttttt
tK
Tωω
ωθ sinsin
1
And in order to minimise the oscillations, it is desirable to avoid oscillations in dθT/dt:
Equation 4.19 ( ) [ ]( )( )rampnn
rampshaft
rated
TTttt
tK
T−⋅−⋅⋅
⋅== ωωωθ coscos
From standard trigonometric relationships this can be re-written as:
Equation 4.20
⋅⋅
⋅−⋅⋅⋅
⋅
⋅−=
2sin
2
2sin
2 rampnrampnn
rampshaft
rated
T
ttt
tK
T ωωωω
To avoid sinusoidal oscillation in ωT, the stationary points provide the speed maxima by
differentiating Equation 4.19:
Equation 4.21 ( ) [ ]( )( )rampnn
rampshaft
ratednT
Tttt
tK
T
dt
d−⋅−⋅⋅
⋅
⋅−== ωω
ωωα sinsin
This can again be simplified by standard trigonometric relationships:
Tq
t
Trated
tramp
T1(t) = Tratedt/tramp
T2(t) = -Trated(t-tramp)/tramp
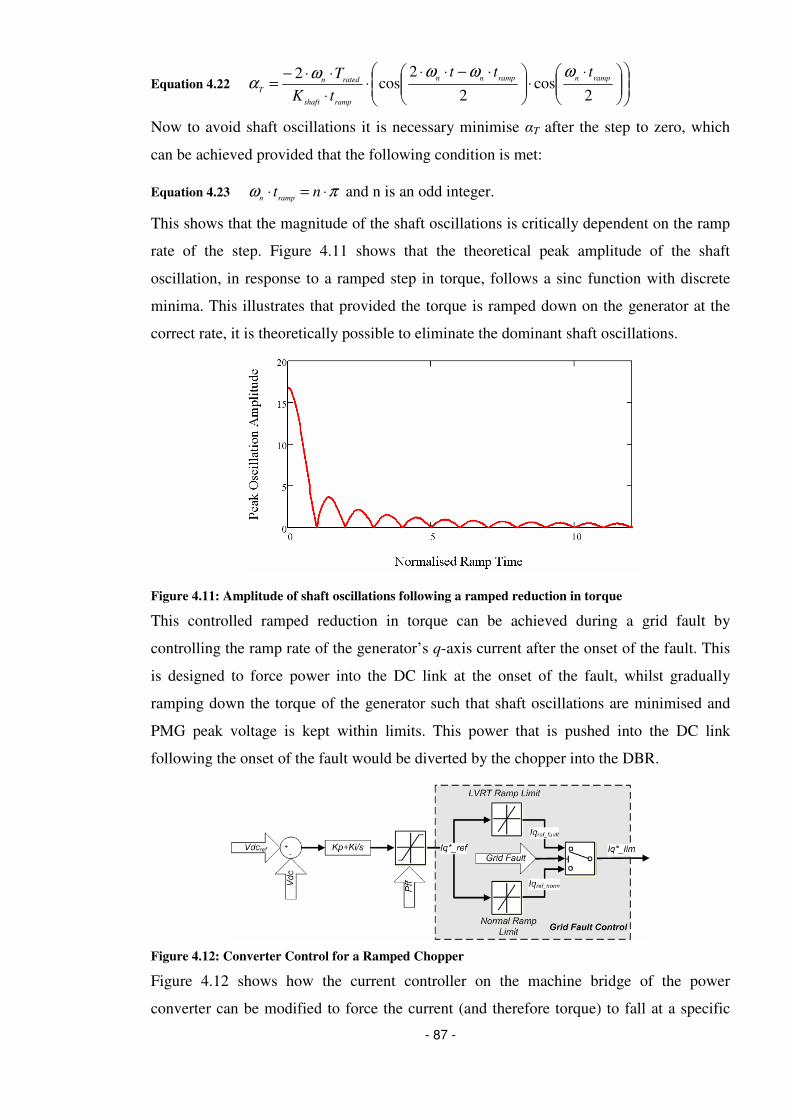
- 87 -
Equation 4.22
⋅⋅
⋅−⋅⋅⋅
⋅
⋅⋅−=
2cos
2
2cos
2 rampnrampnn
rampshaft
ratedn
T
ttt
tK
T ωωωωα
Now to avoid shaft oscillations it is necessary minimise αT after the step to zero, which
can be achieved provided that the following condition is met:
Equation 4.23 πω ⋅=⋅ ntrampn
and n is an odd integer.
This shows that the magnitude of the shaft oscillations is critically dependent on the ramp
rate of the step. Figure 4.11 shows that the theoretical peak amplitude of the shaft
oscillation, in response to a ramped step in torque, follows a sinc function with discrete
minima. This illustrates that provided the torque is ramped down on the generator at the
correct rate, it is theoretically possible to eliminate the dominant shaft oscillations.
Figure 4.11: Amplitude of shaft oscillations following a ramped reduction in torque
This controlled ramped reduction in torque can be achieved during a grid fault by
controlling the ramp rate of the generator’s q-axis current after the onset of the fault. This
is designed to force power into the DC link at the onset of the fault, whilst gradually
ramping down the torque of the generator such that shaft oscillations are minimised and
PMG peak voltage is kept within limits. This power that is pushed into the DC link
following the onset of the fault would be diverted by the chopper into the DBR.
Figure 4.12: Converter Control for a Ramped Chopper
Figure 4.12 shows how the current controller on the machine bridge of the power
converter can be modified to force the current (and therefore torque) to fall at a specific

- 88 -
ramp rate. The grid fault causes the feed-forward power limit and the DC link controller to
work together to rapidly reduce the torque reference on the machine bridge, however,
slower ramp limits are applied during the fault than during normal operation. This ramp
limit is set according to the idealised ramp time described in Equation 4.23 and as Iq*_ref
is reduced much faster than this limit, the set-point sent to the current controller (Iq*_lim)
is limited to change at the specified ramp rate.
This modification to the control method has been implemented in the wind turbine
converter model and simulated. Figure 4.13 shows the results. The energy absorbed by the
DBR is reduced by 60% compared to the case with a fully rated DBR. This improvement
would permit existing turbine designs to ride-through multiple consecutive faults, or for a
smaller DBR and chopper to be used in future designs that only have a single fault
requirement.
Figure 4.13: Fault Ride-through of a PMG with Ramped Chopper

- 89 -
The ramped DBR method has also made considerable improvements to the magnitude of
the speed oscillations, which are around 0.015pu peak to peak during the fault and
0.045pu peak to peak in the worst case after the fault. This is compared to amplitude of
0.19pu peak to peak without a DBR and chopper. Hence, the oscillations are negligible
compared to the case without a chopper. In fact the shaft is near transient free following
the ramped reduction in torque at the onset of the fault, with the majority of shaft
oscillations being excited by the release of the DC link controller to higher ramp rates as
the fault clears. As the DC link controller regains control there is a rapid 0.15pu change in
the generator torque (see Pgen plot at 61.14s). This slight step is also visible on the plot
showing power through the chopper switch (Pchop), however, the power to the chopper
broadly follows the intended profile, by absorbing the power imbalance between the
network and machine bridges. The slight step in torque when the grid recovers is primarily
responsible for the excitement of the shaft and it may be possible to improve on this
response. The transient spike in output power that coincides with the fault recovery (Pgrid
at 61.14s) draws power from the DC link causing it to fall suddenly at the same time that
the DC link controller is released from the ramp limits. This transient therefore causes the
transient in torque and removing this would allow an even smoother response from the
machine bridge and shaft.
The result of minimising the speed oscillations and gradually reducing torque on the PMG
is to significantly reduce the transient voltages that the power converter has to control on
the generator side (Vpmg). This is achieved by reducing the peak speed and thereby
reducing the rate of change of generator flux, which reduces the open circuit EMF of the
generator.
Overall, this novel control adaption makes a contribution to improving the performance of
direct-drive PMG systems under grid faults. The initial outcome of this work has been
implementation of a generic design rule for new direct-drive PMG systems to ensure that
they are equipped with chopper rated for full power for at least ½s. However, further work
in this area would include verifying the control performance when a wind turbine reaches
type testing. Additionally, the control strategy could be investigated further in the context
of other mechanical modes rather than just the fundamental shaft oscillation.
4.2.6 Reduced Order Model
One of the side effects of deploying a chopper and DBR is to improve the decoupling
between the machine bridge and the grid. The chopper ensures that the machine does not
have to be exposed to any fast transients caused by grid events and that the DC link stays

- 90 -
within its target limits. This has led Conroy and Watson [86] to show that models of wind
turbines with PMGs, full converters and choppers can be simplified. Their approach is
only for transient studies and hence the machine side power can be represented as fixed by
a constant current source feeding the DC link. The control and modelling of the network
side bridge remains unchanged, thus ensuring the correct grid behaviour is represented.
However, this approach is not appropriate for longer timescale studies where wind
variability is relevant.
Figure 4.14: Reduced Order Model Design
Here Conroy and Watson’s simplified approach has been built upon. The fast dynamics of
the machine bridge are no longer relevant, hence it is not necessary to represent the
machine or the inner current loops of the machine bridge. Instead, it can be noted from
Figure 4.2 that the DC link voltage controller directly controls the q-axis current, which in
turn aligns with torque. Ignoring fast dynamics, this DC link voltage controller is therefore
indirectly, but proportionately controlling the generator torque. Hence, in a per unitised
model, the per unit q-axis current reference is numerically identical to the per unit
electromagnetic torque exerted by the generator on the shaft. Hence, the machine and
much of the machine bridge control can be removed to leave a hybrid simplified model
that retains sufficient fidelity for fast timescales whilst removing some of the complexity
associated with the machine bridge. This is shown in Figure 4.14.
Figure 4.15 shows the comparison of the full model, which includes the machine model
and machine bridge representation, and the simplified model discussed above. It is evident
from these two plots that the grid side outputs of the simplified model are near identical to
the more detailed model case. However, it should be repeated that this is only true for the
case with a chopper and DBR decoupling the two bridges.

- 91 -
This hybrid reduced order model is often used in subsequent sections that address
frequency response and inertia. Whilst even simpler models are possible for frequency
response studies, this model accurately reflects speed changes which might otherwise
influence PMG voltage, particularly with fast inertial response.
Figure 4.15: Fault Ride-through Simulation Comparison of PMG (Right) and Reduced Order (Left)
Models
4.3 Frequency Response
The instantaneous balance between supply and demand on the transmission system is
maintained through the system frequency. Conventional steam turbine synchronous
generator based power plants provide a fast response to changing frequency by releasing
or storing energy in their rotational inertia and steam drum before their slower governor
and boiler action increases or decreases their output power to return system frequency to
its target.
Full converter wind turbines are specifically designed to vary machine frequency
independently to network frequency so that the blades can be rotated at the optimal
aerodynamic speed rather than being fixed to the system frequency. However, this acts to
decouple their physical inertia from the grid and means that frequency response capability
must be built into their control systems to compensate.
Conventionally, if system demand exceeds supply then the system frequency falls and a
synchronous generator would release an inertial contribution as its rotational kinetic
energy falls, thus aiding the stability of the system. Conversely, if the system supply

- 92 -
exceeds demand then the system frequency rises above nominal and energy is stored in
the synchronous generator’s rotational inertia. This intrinsically stabilising contribution of
synchronous generators helps to ensure that major deviations in system frequency are
extremely rare.
Severe frequency disturbances, such as that illustrated in Figure 2.22, are usually the
consequence of one or more large power stations tripping. Unscheduled power station
trips cause a sudden generation shortfall which has to be rapidly covered by other power
stations on the system, or else by flexible demand. Given that power electronic interfaced
wind turbines do not intrinsically provide the same service as conventional generators, the
subject of frequency response is of interest to system operators globally.
4.3.1 Grid Code Requirements
Parts of the following two sub-sections of the thesis, covering frequency response and
synthetic inertia, have been written up for Wind Energy by Banham-Hall et. al. [87]. This
article is currently being updated following review.
The GB transmission system is a comparatively islanded system with a high credible loss
of generation due to large individual nuclear generators. Furthermore, with plans to meet
the greater part of the UK’s 2020 targets with large offshore wind farms, it is unsurprising
that the GB Transmission System Operator (TSO) has been at the forefront of
investigations into the capability and impact of wind turbines on system frequency.
The approach National Grid [78] has taken is in line with their general principle of
treating all generators connecting to the grid equally. Hence, wind farms connecting to the
transmission system must be technically capable of providing the same service as
conventional generators. This technical capability is checked for compliance when the
wind farm is commissioned, by a series of compliance tests.
4.3.1.1 Droop
The key frequency response related requirement currently mandated in GB Grid Code is
the requirement to provide droop response and is shown in Figure 4.16. A wind farm must
be capable of operating such that it can regulate up or down its output power in direct
proportion to the magnitude of the deviation in system frequency from the nominal 50Hz
target. This response should be directly proportional with only a limited dead-band
permitted around the 50Hz nominal frequency. A droop of 3-5% should be attainable,
which in turn relates back to the speed of a synchronous generator. A droop of X%
implies that a hypothetical 100% load step on that generator would cause a change in

- 93 -
speed of X%. Hence a 3-5% droop implies a change in power of between 40-66% per
Hertz deviation from the nominal frequency.
Figure 4.16: GB Requirement for Droop Control from National Grid [78]
Clearly, a wind farm cannot indefinitely increase its power output in line with a droop
requirement unless it is operating at an output power lower than the available wind power.
Additionally, it would be economically undesirable to operate wind farms at lower than
their maximum output just to provide frequency response, when other power plants can
provide this capacity. Therefore the requirement of Figure 4.16 is only relevant when a
generator is selected for Frequency Sensitive Mode (FSM). When a generator, such as a
wind farm, is not selected for FSM it can operate under the less stringent requirements for
Limited Frequency Sensitive Mode (LFSM). Under LFSM, the wind farm is only required
to regulate down its output in response to a frequency above 50.4Hz. It is thereby allowed
to operate at the maximum available power unless there is a major system over-frequency
event.
The split in requirements between FSM and LFSM highlights a key difference between
the GB regulatory framework and the economic reality. Wind farms being built have to be
technically capable of providing FSM operation and are tested for it; however, they
typically price themselves out of providing this service and invariably operate under
LFSM.
The technical requirement to provide droop response from a wind farm has to be enhanced
to take into account the variable nature of the wind resource. In contrast to a conventional
generator, which would operate at a fixed output under normal operation, a wind farm
would operate according to the variable available wind power. Figure 4.17, from National
Grid [78], shows the GB Grid Code requirement on wind farms providing frequency
response, this requires that when they are selected for FSM, they reduce their output

- 94 -
below the variable available power (Pavail) to a lower fixed output, known as the Capped
Committed Level (CCL), and regulate according to system frequency from that level. The
generator must also then supply a discretely updated measure of the maximum available
power, known as the Maximum Export Limit (MEL), which informs National Grid of the
magnitude of the (varying) level of reserve held by the wind farm.
Figure 4.17 shows that with variable wind speed it is understood that the available power
could drop sufficiently to compromise response. This is shown on the dark blue output
between about 17 minutes and 24 minutes, where the output reverts to tracking the
maximum available power. This highlights a distinct feature of the implementation of the
GB droop response requirement; it is based on a variable reserve approach, but ideally
targets a fixed output.
Figure 4.17: Implementation of Frequency Response with an Intermittent Resource taken from
National Grid [78]
The Danish approach to providing frequency response capacity is the reverse of the GB
case, the Danish system operates a fixed reserve, variable output requirement [88]. This is
typically known as “Delta-control” and requires a generator to operate at a fixed margin or
“Delta” below their maximum available power. The droop response then operates relative

- 95 -
to the varying output of the wind farm. This type of response is illustrated, compared to
the GB approach, in the FSM period of Figure 4.18 (Pdelta).
4.3.1.2 Response Types
The droop requirement dictates the magnitude of the steady state change in power output
that a wind farm should provide in response to a frequency deviation. However, following
a major loss of generation the speed of response is also critical. As such the market, from
which FSM services are procured, is divided into three different types of response. Of
these three, “Primary” and “Secondary response” govern the increase in power output in
response to a reduction in grid frequency and “High response” governs the reduction in
power output in response to a rise in grid frequency.
Primary response is the fastest type of frequency response currently procured for the GB
grid. The magnitude of response is measured 10 seconds after a frequency deviation and
should be maintained for 30 seconds according to National Grid [78]. Although the
measurement is made at 10 seconds it would usually be expected that a generator would
start to provide additional power output within 2 seconds of the frequency deviation. The
aim of primary response is to stabilise the frequency within operational limits.
Secondary response is slower response that is measured according to the minimum
increase in power supplied between 30 seconds and 30 minutes after a frequency
deviation. Its purpose is to start the process of restoring system frequency whilst allowing
time for the TSO to modify generation profiles to make up for the generation shortfall.
Both primary and secondary response would be expected to be supplied relative to a fixed
output level.
High frequency response is the response to a system over-frequency event and is
measured 10 seconds after the frequency event. In contrast to Primary and Secondary
response, High frequency response has no time limit specified, however, it would usually
only be required for a maximum of half an hour before National Grid’s Balancing
Mechanism adjusted generation profiles to compensate for the imbalance. Also in contrast
to the low frequency response capabilities, the High frequency response controller must be
active at all times, albeit it would only respond when frequency is significantly above
target when in LFSM. When operating in LFSM, the wind farm’s output would be
variable, therefore, but if the frequency exceeds the limit (50.4Hz) and High response is
required, the wind farm would regulate its output relative to its power output immediately
prior to the frequency exceeding 50.4Hz. This control is known as Balance control and is

- 96 -
illustrated alongside the other types of control discussed here in Figure 4.18. It should be
noted from this illustration that in the event that the available wind power falls, excess
response may be provided by the wind farm, which would revert to tracking the (lower)
available power.
In addition to the frequency response controllers, it is possible National Grid may
constrain the output of a given wind farm to a maximum level. This is typically an
expensive option for National Grid, and generates negative headlines such as The
Telegraph’s [89] “Wind farm paid £1.2 million to produce no electricity”. This was due to
the constraint payments made to Scottish wind farms for not producing power.
Nevertheless, the control, known as “Absolute Limit” control is implemented in the
frequency controller and shown in Figure 4.18.
Overall, methods of providing frequency response have been implemented by wind farm
operators, which have been successfully tested against the compliance tests of GB Grid
Code by Horne [90]. Different control methods that can be used to provide frequency
response are discussed in section 4.3.2.
Figure 4.18: Frequency Response Types
4.3.2 Control Methods for Frequency Response
In order for a wind turbine to hold power reserve for frequency response, it is ultimately
necessary to reduce the aerodynamic power from the blades. Figure 3.3 shows that in
order to achieve this, for a given wind speed; a wind turbine controller must either change
the pitch angle, or else change the speed of the blades. Whereas the pitch angle to
coefficient of performance relationship is a monotonically decreasing function for any
given Tip Speed Ratio (TSR); both acceleration and deceleration of the blades, relative to
the optimal speed, leads to a decrease in power output. However, deloading a turbine by
Time
Pdelta
Pout Pavail Pref Frequency Pmax
10s
High Response
10s
Primary Response
Selected for FSM LFSM operation only
Balance Control
Absolute Limit Control

- 97 -
deliberately slowing the blades down below the optimal speed would lead to slow
response times due to the slow acceleration of the wind turbine required to return the
turbine to the optimal operating point. It is therefore desirable to either operate on the
right hand side of the peak in Figure 3.3 or to use the blade pitch to control output.
Holdsworth, Ekanayake and Jenkins [91] were the first to consider the provision of
inertial and frequency response from wind turbines in depth. Their analysis compared the
capabilities of an FSIG with a DFIG, showing the natural inertial response of the FSIG
and comparing it with the lack of inherent response from the DFIG. They then proceed to
demonstrate how inertial response and frequency control can be added to the wind turbine
controller. Their contribution to synthetic inertia will be considered in section 4.4.1. Here,
however, their proposals for provision of frequency response are considered. They
propose a frequency response strategy that applies droop control on the converter torque
set-point which is matched by a second droop characteristic that trims the minimum pitch
angle of the blades. This range of pitch angle variation is shown to give a maximum 20%
change in power output and is demonstrated through various different, but constant, wind
speed simulations.
Section 3.5.2.2 showed that the direct speed controlled wind turbine optimised power
capture by controlling the wind turbine blades to the optimal rotational speed. Therefore,
in order for a direct speed controlled wind turbine to hold margin for frequency response it
is necessary to deload the turbine through a change in pitch angle. This can be achieved
with the wind turbine controller shown in Figure 4.19.
For this method of frequency control it is necessary to ensure that the power output of the
wind turbine changes, but that the speed stays close to optimal. This allows the wind
turbine to respond to a frequency deviation with all its power reserve whilst only changing
the blade pitch angle and not speed. Hence, the controller of Figure 3.17 must set the
optimal speed, when in FSM only, according to the estimated available power rather than
the measured output power. This means that the margin held by the wind turbine when in
frequency responsive mode is subject to the same error as the estimated available power.
This error would be partially reduced by averaging many turbines’ output.
Under this method of frequency response, the pitch controller acts to regulate the
measured power output of the wind turbine to the set-point by using a PI controller (rather
than the droop method used in Holdsworth, Ekanayake and Jenkins). The power reference
is taken from the estimate of the available wind power and modified to hold a reserve and
respond to any changes in frequency. For example if the available power in the wind is

- 98 -
2MW, a turbine is to hold a 300kW margin and the system frequency is 50Hz, the pitch
angle controller will increase the pitch angle until the measured output power is 1.7MW.
The capability to provide primary frequency response by pitch control is considered
further by modelling and simulation in section 4.3.3.
Figure 4.19: Primary Frequency Response by Pitch Control
The simple droop control of pitch angle proposed by Holdsworth, Ekanayake and Jenkins
works under steady wind conditions and the control of pitch angle for frequency response
is necessary for the direct speed controlled turbines. However, under intermittent wind
conditions, neither technique is ideal for meeting the fixed output, variable reserve
requirements of the GB Grid Code. Furthermore, the pitch controller has to deal with the
continuously variable aerodynamic power.
An alternative approach, which works well with indirectly speed controlled wind turbines,
is to modify the power generated directly. Section 3.5.2.1 showed how the rotor speed of a
wind turbine could be used to set the optimal power or torque set-point for the generator.
This torque (see Figure 3.12) or power (see Figure 3.14) set-point is then fed to the power
converter controller.
Ekanayake, Jenkins and Strbac [92] have shown that frequency response reserves can also
be attained by directly modifying the torque set-point of a DFIG or full converter wind
turbine. This is done by subtracting a term from the optimal torque or power set-point. In
Figure 4.20 this is shown as a modification to the Pavail reference point. Pdelta is the margin
held for response. The sample and hold block is triggered to hold whenever the frequency

- 99 -
exceeds the nominal limit (50.4Hz in LFSM) so that “Balance control” can be
implemented. Otherwise, the power reference to the power converter is modified by the
available power, response holding and any deviation in frequency. Note that in order to
meet the specific requirements of GB Grid Code with regulation from a fixed output level,
the controller’s Pavail signal is held constant for a settlement period (30 minutes) based on
a forecast; whereas under a “Delta control” arrangement it continuously varies.
A change in the power reference of the power converter leads to a change in the torque on
the generator. This in turn leads to a change in the speed of the generator and blades. If the
wind turbine is operating in rated wind speeds or higher, this change in speed will lead
onto a change in the blade pitch angle of the turbine.
This frequency control method has the advantage that response times are only limited by
the dynamics of the power converter and the ability to accurately measure system
frequency. Given that system frequency measurement typically provides a noisy signal,
the frequency controllers are equipped with low pass filtering on that frequency
measurement, but given the response requirement of 2 seconds, this filter does not pose a
problem for primary response. The disadvantage of this method from a commercial
perspective is a patent by Delmerico and Miller [93], of General Electric, covering some
of the necessary components and pre-dating Converteam’s acquisition by GE.
Figure 4.20: Primary Frequency Controller Using Converter Power Reference
The power converter control operates to implement the required torque on the generator. It
does this regardless of the aerodynamic effect any speed change is having. Conroy and
Watson [94] have shown, with work that included an inertial controller, that drawing too
much power from the blades, which leads to an excessive deceleration, can cause unstable

- 100 -
operation and ultimately contribute to a frequency collapse. Even if collapse in the speed
of the turbine is avoided, Tarnowski et al. [95] have shown that the recovery periods
following periods of significant over-production can be of long duration and require
significant power reductions.
Operation of a power converter interfaced wind turbine, with a power reserve for
frequency response, in below rated wind conditions can lead to an acceleration of the
blades to a higher than optimal TSR. Tarnowski’s starting point was a turbine operating at
the optimal rotational speed, such that over-production leads to worsening TSRs.
However, a plant operating in FSM according to Figure 4.20 can store additional energy
as kinetic energy under below rated wind speed conditions, thus potentially avoiding the
under-production recovery periods associated with frequency response from an optimal
starting speed. This has been investigated by Banham-Hall et al. [96] and Teninge et al.
[97].
Figure 4.21 shows a one-shot controller to provide additional power output from stored
rotor kinetic energy. First the estimated available power is used to provide an estimate of
the optimal speed of the turbine. Tarnowski’s [95] research, in conjunction with Vestas,
derives the available power estimate from an estimate of the prevailing wind speed as is
done here. The energy stored in the rotor can then be calculated for the current operating
speed (ωb) and the optimal operating speed (ωopt). The difference between these two
values is the energy available for over-production, which can contribute to an additional
power response for the Primary response period (Tprim). This additional power capacity is
sampled and held in the event of frequency falling below a fixed level (ftarget) and added to
the power converter’s set-point to release a one-shot power increase.
Figure 4.21: Frequency Response Controller for Temporary Over-production

- 101 -
4.3.3 Frequency Response Capability
Figure 4.22 shows a comparison of the high frequency response of wind turbines, using
the pitch and power regulation strategies, under constant wind conditions. The left hand
plot shows a case with low wind speed. The right hand plot considers the case where the
wind speed is above rated, but the wind farm is operating in FSM and therefore holding a
margin for both high and low frequency response. In both cases the response to a 0.5Hz
frequency step at t=80s is evaluated, which corresponds to one of the more severe
compliance tests for the GB Grid Code.
In both cases it can be seen that the frequency response method that directly adjusts the
power converter set-point leads to an instantaneous and proportional change in the power
output (Pturbine). The power response from the pitch regulated turbine is slightly slower,
as it depends on the dynamics of pitching mechanism; however, a stable new power
output level is achieved within 2 seconds.
In the low wind case, the power reserve held on the power reference regulated case has led
to the turbine operating at above optimal rotational speed; furthermore, the pitch controller
has intervened to ensure turbine speed does not exceed the design rating. However, the
rapid reduction in the converter’s power reference in response to the frequency change
allows the turbine to accelerate (Wr), as the generator torque is lower than the blade
torque in both cases. The change in blade pitch angle is then slow to catch up, as the
turbine’s acceleration is slow. In contrast, the pitch regulated turbine is operating at
optimal speed throughout both scenarios. In order to maintain the optimal speed and
provide the required power reduction, the pitch controller has to change the blade pitch
much faster and is limited initially by the maximum pitch rate of the turbine. The pitch
controller is slightly under-damped to optimise the speed of response in this
implementation.
A side effect of operating the direct speed controlled turbine at optimal speed throughout
the scenario is that the corresponding PMG voltage is lower, as the open circuit voltage of
the PMG is reduced. Furthermore, the PMG is not exposed to the slight voltage transient
that occurs for the power reference regulated case under high wind conditions, which is
due to a sudden torque reference change.
Figure 4.23 shows the comparison of these turbine controllers, plus the one-shot
additional energy controller, under a low frequency deviation. This time the frequency is
ramped down by 0.8Hz over a 10 second period, again reflecting a severe test under the
GB Grid Code.

- 102 -
Figure 4.22: High Frequency Response Comparison under low wind (left) and high wind (right)
As with the high frequency response case, when the frequency response is driven by the
pitch controller it is unsurprisingly somewhat slower than the power converter driven
response. The response settles some 2.5 seconds later in the low wind case. The one-shot
controller is activated right at the start of the frequency deviation and leads to a step
increase in output power from the wind turbine (Pturbine) that lasts for 20 seconds.
For the low wind speed case, the direct speed controlled turbine, with pitch regulated
power output, operates throughout the scenario at the optimal rotational speed for the
wind speed. This is in contrast to the deceleration of the power reference regulated
turbines, which start at an above optimal speed. In the case with the one-shot controller,
the turbine decelerates back to the optimal speed much more quickly, as the kinetic energy
stored in the blades is being actively used in the additional power output contribution. The
standard power reference regulated case experiences a slower deceleration as power
output only exceeds the power capture due to the relatively smaller deviation in Cp from
optimal.
The one-shot controller is not applicable to the high wind case as the rotor will be
operating at rated speed and therefore is below the optimal rotational speed and at rated
torque. In this scenario the direct speed controlled turbine’s constant speed approach can
be seen to be of some value. The faster power response of the power regulated case comes

- 103 -
at the expense of a significant blade speed transient. The power difference between the
power reference regulated case and the pitch reference regulated case has to be supplied
from the kinetic energy of the blades, leading to a 6% drop in turbine speed. This sub-
optimal speed recovers as a result of an undershoot in pitch angle, which allows the
turbine speed to be restored to target. For different wind conditions, however, this speed
transient could lead to a period of under-production, compromising the turbine’s
frequency response.
Figure 4.23: Low Frequency Response Comparison under low wind (left) and high wind (right)
Figure 4.24 shows a longer timescale study which includes variable wind speed for
investigating the high frequency response performance of a wind turbine using the power
reference regulated approach. This scenario demonstrates the behaviour of the absolute
power limit (set at 0.95pu) and the balance controller. The scenario wind speed has been
selected such that it varies around the rated wind speed (13m/s) of the wind turbine. The
frequency is ramped up by 1Hz at t=200s.
From this variable wind speed study the smoothing effect of the rotor’s inertia can be seen
on the power output from the turbine. The turbulent wind field leads to much slower
variations in the turbine’s speed. These slow variations in turbine speed slowly move the
turbine’s operating point according to Figure 3.15, effecting a change in the power output.
When the turbine is operating at rated speed and the wind speed rises, the turbine pitch

- 104 -
controller responds to limit the blade rotational speed. This pitch response is filtered by
the slowly varying rotational speed too.
Figure 4.24: High Frequency Response in Variable Wind (available power shown in red, with output
power in blue)
In this example, the turbine is operating only in LFSM, and hence only responds when the
frequency has exceeded 50.4Hz with a “Balance control” response. Prior to the frequency
deviation the wind turbine is tracking the available power (red) and outputting the
maximum power possible. At the moment that the grid frequency rises, the wind turbine
output is at 0.95pu, the Balance controller samples and holds this power output value and
deloads relative to it to 0.8pu. The wind turbine’s power output cannot now exceed 0.8 pu
unless the frequency falls. However, when the available power drops below 0.8pu, the
wind turbine can revert to tracking the available power in the wind, such as occurs in the
simulation at around 260 seconds. This reversion to tracking available power cannot
compromise the response but may lead to additional response, which helps to restore
system frequency.
Figure 4.25 shows the challenges of providing low frequency response from a fixed output
level. The wind farm is initially deloaded to a fixed output level (0.6pu), however, the
available power varies sufficiently to cause the farm controller to have to revert to

- 105 -
tracking the available power for a period (around t = 100s). Furthermore, although the
frequency response to the low frequency step at t = 200s leads to a predominantly smooth
output from the wind farm, over the period considered here, the wind varies sufficiently to
reduce the response for a period. The response is actually briefly eliminated by the
reduction in available power at t = 390s.
Figure 4.25: Low Frequency Response in Variable Wind with GB Requirements (available power
shown in red, with output power in blue)
This shows the particular challenge of providing a firm response margin for secondary
response time scales when the wind speed is close to the turbine’s ratings. Small
fluctuations in the wind speed cause significant changes in the output power, greatly
affecting and potentially compromising the margin available for response. To compensate
for this, the wind farm would have to deload itself by a greater margin prior to any
frequency event, thereby incurring a greater economic penalty.
The alternative “Delta control” approach does not have this drawback, as shown in Figure
4.26. Under this control strategy the wind farm can track the available power with a fixed
margin prior to the frequency deviation. Then, following the frequency fall, the wind farm
can be increased up to a maximum of the available power. The wind farm then reverts to
tracking the available power to provide maximum output.

- 106 -
Figure 4.26: Low Frequency Response in Variable Wind with Delta Requirements (available power
shown in red, with output power in blue)
In this scenario the wind speed rises and therefore the effect of wind intermittency is to
contribute to meeting the generation gap. The problem with this control method would be
highlighted by falling wind speed. In that event, the additional power provided by the use
of the Delta margin could be offset by a loss of power due to reduced available power in
the wind. Overall therefore, Delta control solves the challenge of predicting the necessary
deload for reliable frequency response, that the GB requirements lead to, but potentially
causes a further problem for system operators as real response capacity depends on the
variability of the prevailing wind conditions.
Despite the differences between delta control and the GB requirement to regulate power
output from a fixed level, it can be seen that the wind turbine control systems themselves
can be modified to allow wind farms to hold power reserves. These power reserves can be
delivered within the timescales required for primary response, although the mechanical
systems of the wind turbine may continue responding for a considerable time afterwards.
Wind farms can also contribute high frequency response and a balance controller has been
presented that ensures optimal response from a wind farm in LFSM. The technical

- 107 -
challenges of providing droop type response from directly or indirectly speed controlled
turbines can be met with appropriate control strategies.
Whilst this section has shown that it is technically feasible for wind farms to hold
frequency response reserves, it has only touched on the economic implications. Holding
reserves for low frequency response implies spilling wind energy and incurs a significant
opportunity cost. Whereas today’s conventional generators can benefit from significant
fuel savings whilst holding reserves, there is no such compensation for wind power.
Hence, the economic viability of wind for this application, on all but a few high wind
occasions per year, is likely to be questionable.
The Grid Code requirements for provision of frequency response currently incur a
technical burden on wind farms. They have to meet the technical requirements of the
code. However, given the questionable economic implications of providing frequency
response from wind power, it is worth considering what other options are available in
order to meet the frequency response requirement. The second half of this thesis will
address this issue.
4.4 Synthetic Inertia
Section 4.3 has shown that the frequency response capability of power converter
interfaced wind turbines differs substantially from conventional synchronous generators.
Along with section 2.5, it has been shown that the inertial response of grid connected
generation could substantially change in the coming years. The frequency response
capability of wind turbines and wind farms to provide primary, secondary and high
frequency response has been investigated in the previous section and is already clearly
mandated in the GB Grid Code with specific guidelines that cover technical requirements
on wind farms. This section specifically covers the initial inertial response to changing
frequency.
4.4.1 Grid Code Developments
It is notable that the procurement mechanism for frequency response of the GB TSO only
considers time periods of 10 seconds and longer. This is reflective of the inherent inertial
effect that conventional plant’s synchronous generators and rotating machinery provides
to the grid today, arresting the rate of change of frequency and helping stabilise the
system. As the future grid is likely to incorporate more power electronic interfaced
equipment, it is unsurprising that specification of an inertial component was considered in

- 108 -
the first draft of the European harmonised Grid Code [98] from the European Network of
Transmission System Operators for Electricity (ENTSO-E).
Thus far only Hydro-Quebec [99] have implemented a Grid Code requirement for a
synthetic inertial response, requiring manufacturers to have an equivalent H constant of at
least 3.5 seconds.
The capability of wind turbines to provide inertial response has been the subject of
consultation between National Grid [100] and manufacturers. Concern centred on the
recovery period of wind turbines after they have provided an inertial response and whether
the measurement of system frequency could be accurate and fast enough to provide the
desired response. Perhaps as a result of these uncertainties, the latest working copy of the
European code has removed this requirement according to ENTSO-E [101]. In its place
ENTSO-E has proposed a faster response (6 seconds) from primary response, with the aim
of avoiding the need for synthetic inertial response. It is in the context of this regulatory
uncertainty that this work explores the capability of wind turbines to provide a synthetic
inertial response.
4.4.2 Control Methods for Providing Inertia
An analysis of the change in kinetic energy of a synchronous machine’s rotor in response
to a frequency change led to Equation 2.12, which showed that power released by that
synchronous machine would be broadly proportional to the derivative of frequency. On
this basis Holdsworth, Ekanyake and Jenkins [91], Morren et al. [102] and Morren, Pierik
and de Haan [103] considered the kinetic energy of DFIG wind turbines and proposed a
control strategy based on emulating this. These papers inform the general derivation here.
The kinetic energy of the rotating parts of a wind turbine is given as:
Equation 4.24 2
2
1ω⋅⋅= JKE
Differentiating the kinetic energy with respect to time provides the power output profile
from energy stored in the rotor according to:
Equation 2.12 dt
dJ
dt
dJ
dt
KEd ωω
ωω ⋅⋅=⋅⋅⋅= 2
2
1)(
Additionally, an inertial constant can be defined according to the turbine’s kinetic energy
and rated apparent power. This inertial constant determines the time for which a generator
can supply rated power purely from its kinetic energy.

- 109 -
Equation 4.25 S
JH
⋅
⋅=
2
2ω which can be rearranged to
2
2
ω
HSJ
⋅⋅= and substituted into
Equation 2.12:
Equation 4.26 dt
dHSP
inertia
ωω
ω⋅⋅
⋅⋅=
2
2 which naturally simplifies in per unit terms to:
Equation 4.27 dt
dH
dt
dHP
inertia
ωωω ⋅⋅≈⋅⋅⋅= 22
Hence, the inertial controller derived from an analysis of the release of kinetic energy of
the wind turbine has to respond to the rate of change of grid frequency. A controller that
uses this strategy is shown in Figure 4.27 and adds a term to the turbine’s power
reference. This approach of modifying the power (or torque) reference of the turbine
means that it is suited to use with the classical indirect speed control of turbines.
It is notable that the controller has to include some additional components other than the
gain and frequency derivative. Any measure of grid frequency is subject to noise owing to
voltage distortion, harmonics, poor PLL performance or voltage transients. Given that the
measurement of grid frequency is subject to noise, the frequency derivative will be subject
to spurious transient peaks in response to frequency measurement noise. To prevent these
transients leading to transitory impulse power demands on the wind turbine, the measured
frequency has to be pre-filtered by a low pass filter. Additionally, if this inertial controller
were continually active it would add a stochastic term to the wind turbine’s maximum
power tracker, thereby potentially having a negative impact on wind turbine yield.
Therefore, a dead band is also included, which in conjunction with the low pass filter,
helps to ensure that the inertial controller is only sensitive under large sustained frequency
changes.
Figure 4.27: Inertial Control by Frequency Derivative
A comparison of the different inertial control methods presented here is conducted in
section 4.4.3. Nevertheless it should be considered that the low pass filter and dead band
combination have to be specifically introduced to avoid an overly sensitive response
owing to noise on the frequency derivative and so that the controller only responds under
large frequency deviations. Furthermore, whilst this control is suitable for the common

- 110 -
indirect speed controlled turbine, it would not be directly applicable to any future direct
speed controlled versions.
A synthetic inertial controller can be derived for the direct speed controlled turbine by
considering that the aim of an inertial controller is to release the kinetic energy from the
rotating equipment as it slows down to a new operating point. Hence, the synthetic inertial
controller can modify the speed set-point of the turbine, dependent on the magnitude of
the frequency error, to invoke an inertial response. This would de-optimise the energy
capture slightly, although even a frequency change to 49Hz would only lead to a 2%
change in speed, so this effect is negligible. The benefit of this control approach is that the
inertial set-point change is initiated by the magnitude of the frequency deviation and not
by the rate of change of frequency. Hence the controller is less sensitive to frequency
measurement noise. Furthermore, the speed of response is dependent on the dynamics of
the speed controller rather than the bandwidth of the low pass filter used to filter the
frequency in the derivative case. However, this controller still requires a dead band to
ensure that small frequency fluctuations do not continually lead to transient power swings
from the turbine as the speed controller’s set-point changes.
Figure 4.28: Inertial Control by Speed Control
Whilst the speed control method solves the problem of avoiding noise sensitivity to the
frequency derivative, it can only be directly applied to the directly speed controlled
turbine. Furthermore, its response is dependent on the bandwidth of the speed controller.
It is shown in Figure 4.28.
A new alternative approach can be developed by considering the approach to providing
inertia from an energy store described in Larsen and Delmerico [104]. Under their
approach, an inertial controller directly modifies an energy store converter’s firing angle,
thereby modifying power output. However, a feedback loop effectively takes a derivative
of frequency and filters it with a first order low pass filter, thereby indirectly taking a
frequency derivative.

- 111 -
The controller developed here takes Larsen and Delmerico’s approach of generating an
angle from the system frequency but applies it instead to model a synchronous machine’s
response. The feedback loop is replaced by a model of the blades’ deceleration. Section
2.5.3 suggested that changes in grid frequency actually caused the inertial response from a
synchronous machine by leading to a load angle change. This load angle change in turn
leads to a change in torque, which follows a sinusoidal path, according to section 2.5.1.
Hence instead of taking the frequency derivative, an inertial controller can be developed
by generating a synthetic change in load angle. This change in load angle is calculated by
integrating the error between the nominal frequency and the instantaneous system
frequency (note fnom would normally be 1):
Equation 4.28 ( )∫ ⋅−⋅=∆ dtffnomgridnominertia
ωδ
This change in load angle has to be taken relative to an initial synthetic starting load angle
(δnom), which is here taken to be π/4, although this value is somewhat arbitrary (see Figure
2.21). Hence, a new operating load angle is:
Equation 4.29 ( )∫ ⋅−⋅+= dtffnomgridnom
ωπ
δ4
This new synthetic load angle would lead to a relative change in torque, from the initial
load angle (δnom) to the new load angle (δ), of:
Equation 4.30
nom
outTq
TqqT
δ
δ
sin
sin
1
2 ==
This ratio can then act as a torque (or power) reference multiplier, increasing the output of
the turbine as and when the frequency falls and decreasing it when the frequency is high.
This leads to the “Torque Multiplier” output in Figure 4.29.
Thus far this approach has considered a hypothetical machine angle change between the
nominal frequency and the instantaneous system frequency. In a synchronous machine,
this angle change is stopped by the acceleration or deceleration of the machine such that
its rotational frequency returns to matching the grid frequency. In order to emulate this
part of a synchronous machine’s behaviour, it is possible to model the turbine’s speed
response to the torque change and use this to form the feedback loop.
Equation 4.31 dt
dHqT
ω⋅⋅= 2
Hence, the change in speed of the turbine can be modelled as:

- 112 -
Equation 4.32 tdqTH∫ ⋅⋅
⋅=∆
2
1ω
This modelled change in the speed of the turbine then modifies the frequency reference
point and closes the feedback loop. In parallel with this integral feedback is a small
proportion gain contribution which improves the stability of the loop. Now, in the event of
a frequency change, the controller estimates a change in a synthetic load angle and
modifies the torque (or power) reference to the power converter. The power converter
responds fast by changing the generator torque. The modelled speed of the turbine (in the
inertial controller) then decreases and modifies the frequency reference until the load
angle closes and the torque rebalances to its original value. Note that the real turbine
speed is not used owing to unpredictable speed behaviour due to wind speed changes.
Figure 4.29 shows this inertial response controller.
Figure 4.29: Inertial Control by Synthetic Load Angle
4.4.3 Inertial Response Capability
Figure 4.30 shows a comparison of the three different inertial methods in response to the
0.5Hz step increase in frequency. Whilst a step response would not be a realistic physical
scenario on the power system, it serves to distinguish the response of the different control
methods by highlighting the filter and derivative effects. The top plot shows the measured
frequency after the PLL but before the low pass filtering stages of the controllers,
however, the actual frequency applied was a pure step at t = 80s. The wind conditions
were constant and below the rated wind speed. In all three cases, the droop controller was
also active.
The transient power to the grid (Pgrid) shows the benefits and shortcomings of the
different control methods. The method relying on the frequency derivative shows both a
noisy response and a slight delay of around 150ms before the inertial response is initiated.
The delay is partly induced by the low pass filter, whilst the noise is a response to the
overshoot in measured frequency from the PLL, which to an extent persists even after
filtering. Given the fast change in frequency measured, the response is sharp and short

- 113 -
lived from this controller, effectively only achieving a slight improvement over a fast
droop response.
The speed controller method achieves a faster response than the frequency derivative
method and is clearly less noisy. However, the power output profile is solely determined
by the dynamics of the speed controller, so the inertial response lasts for only around
300ms before the inertial contribution is finished and the power profile follows the droop
response. This droop response is only provided at the slower rate at which the blade pitch
mechanism can respond, leaving a time lag between the end of the inertial response and
the droop response reaching the same level.
The response of the synthetic load angle controller is extremely promising, responding
with no time lag and showing little noise sensitivity. The high rate of change of frequency
leads to an overshoot, relative to the steady state droop response, before the feedback loop
closes the synthetic load angle and brings the inertial response contribution back to zero.
The frequency derivative controller and the synthetic load angle controller both effect
rapid changes in power output whilst leaving the slower turbine dynamics to respond. This
change in power output leads to the generator torque being reduced and the blades
gradually accelerating. As the blades reach the maximum speed the pitch controller begins
to increase the blade pitch angle in order to decrease Cp. This is in contrast to the speed
controlled approach, where the pitch controller and speed controller work together to
change the turbine operating point which then leads onto a change in the output power.
This difference means that the speed controlled turbine continues to operate at the optimal
speed, but the other two methods accelerate to a higher than optimal rotational speed.
Figure 4.31 shows the inertial response (no droop) to the GB system event discussed in
section 2.6.2. Here, the response of the synthetic load angle controller and the frequency
derivative controller appear similar, with the speed controller slower. However, close
inspection of the frequency derivative output shown in Figure 4.32 shows the improved
noise rejection of the synthetic load angle method. The frequency measurement noise,
combined with a finite update rate of the power control on the power converter leads to
significantly less smooth power output from the power regulated control.
It is also notable, that the inertial response causes a speed change from the power
reference and synthetic load angle regulated turbines. This speed change in turn leads onto
a reduction in the turbine’s power reference (Po/p) (which then has the inertial term
added) according to the cubic relationship of Figure 3.15. This change in operating point

- 114 -
reduces the inertial response and eliminates it prior to the frequency stabilising. This
ultimately leads into the recovery period, which can be seen as the turbines slowly regain
speed for up to half a minute after the frequency deviation. Whilst this recovery period
can be delayed (by triggering the balance controller on falling rate of change of
frequency), this serves to highlight the concerns that National Grid have had over the
recovery of wind turbines following an inertial response contribution.
Figure 4.30: Inertial response to a high frequency step
The speed controller modifies the speed set-point for as long as the grid frequency is low;
the speed recovery in this case is much slower, matching the frequency recovery of the
grid. However, the dynamics of the speed controller ensure that the inertial response is
also delivered slightly slower. Nevertheless, following delivery of the inertial power
contribution, the controller only recognises a change in speed of the turbine as a slight de-
optimisation of Cp across the flat peak of Figure 3.3 instead of the cubic outcome of the
other two controllers. This ensures that the power recovery period is insignificant
compared to the other two cases.

- 115 -
Figure 4.31: Inertial response simulation to 27
th May 2008 frequency profile (low wind)
In this scenario the wind speed was deliberately modelled at constant speed, but slightly
below the rated wind speed of the turbine. This ensured that the speed changes of the
turbine occur at the steepest part of the operational curve in Figure 3.15, maximising the
differences in the performance of the controllers.
Figure 4.32: Expanded view of Figure 4.31

- 116 -
Figure 4.33: Inertial response simulation to 27
th May 2008 frequency profile (high wind)
In contrast to the case with the wind speed just below rated, the inertial response to the
frequency change at 210 seconds with above rated wind conditions is shown in Figure
4.33 and this illustrates that under high wind conditions the recovery period is eliminated.
The response is not compromised by a change in the available power as the pitch angle
controller responds to the slight change in turbine speed by reducing the pitch of the
blades, thereby temporarily increasing Cp and allowing the turbine speed to recover to
rated rotational speed.
The inertial response simulations have shown the benefit of using a synthetic load angle
approach to providing inertial response. This offers fast response with less noise
sensitivity than the traditionally proposed frequency derivative method. There are several
other alternative methods of providing inertial response. Manufacturers such as Enercon
[105] have proposed one shot controllers that output either a set percentage increase in
power output (i.e. 10% extra for 10 seconds above the varying output) or a set power
output (i.e. 100% output for 10 seconds). Others such as Vestas [106] have proposed
controllers that follow the frequency derivative method.

- 117 -
Initial GB TSO engagement with manufacturers, to address inertia, raised two concerns;
first the recovery periods of wind turbines and second the sensitivity and design of
controllers reliant on taking the derivative of a noisy frequency signal. This work has
shown that it is possible to devise inertial controllers that are less sensitive to frequency
noise whilst offering a fast response. To complete the evaluation of this controller’s
capabilities it would be necessary to address National Grid’s first concern and investigate
the recovery period of multiple different turbines from different manufacturers when
providing this service. National Grid [100] has consulted with manufacturers, whilst
considering the system needs, on limitations and capabilities of wind turbines’ inertial
emulation. This is perhaps a better forum for addressing aspects that depend on
manufacturer specific designs.
4.5 Summary
A novel converter control adaptation has enabled full converter PMG wind turbines to ride
through grid voltage transients with only a minimally rated chopper, whilst a modification
to the wind turbine controller has permitted demonstration of response to grid frequency
transients with a noise insensitive synthetic inertial response.
This chapter has covered the development of control schemes for wind turbines with full
converters to meet the requirements of modern Grid Codes. It has illustrated the challenge
presented by grid faults and used type test data to validate a complete wind turbine model.
This validated wind turbine model then forms the basis for further investigation of the
impact of grid events on turbine behaviour. Section 4.2.4 looks specifically at the fully fed
direct-drive Permanent Magnet Generator identifying its speed-voltage relationship and
high stator reactance as new challenges for GFR compliance. The developed models are
then applied to improving this GFR behaviour, leading to a novel ramped chopper control
scheme in section 4.2.5. This control scheme allows PMGs to ride-through grid faults with
minimal shaft oscillation and stator over-voltage, whilst permitting a smaller chopper and
brake resistor than conventional schemes.
Beyond the challenges of GFR, the chapter moves on to examine the frequency response
capabilities of wind turbines. It shows the key requirements in Great Britain in section
4.3.1 and highlights how these have been applied in the context of the intermittent wind
resource. Section 4.3.2 builds on and extends existing knowledge to develop control
strategies for conventional indirect speed controlled turbines and then novel strategies for
direct speed controlled turbines. Further it shows how wind turbine’s rotors can store

- 118 -
some kinetic energy for short term additional response when operating with a power
reserve in low winds. The operation of these controllers is demonstrated in section 4.3.3.
Synthetic inertial response is one area not currently covered by GB Grid Code, however,
as section 4.4.1 shows; there are developments on a European and international scale
which may see it included. Concern has been raised over the ability of a synthetic
controller to be sufficiently fast and noise insensitive when driven by a noisy frequency
signal, therefore alternative approaches are taken offering better performance than
straightforward derivative based controllers. This is presented alongside an inertial
controller for the directly speed controlled turbine in section 4.4.2, with simulations of
these controllers demonstrating the new controllers’ improved behaviour in section 4.4.3.

- 119 -
5 Energy Storage Development
5.1 Introduction
Chapters 2 to 4 have covered the large scale development of wind power on the GB power
system. They have addressed the emerging challenges for the power system, the
development of models for further power system study and the technical capabilities of
wind turbines and farms to meet some of the requirements of Grid Codes. Chapters 6 and
7 will address the complementary capabilities of Vanadium Redox Flow Batteries to wind
farms and the economics of their development. This chapter acts as a bridge between these
two subjects, highlighting the opportunities, technologies and applications of energy
storage on the power system.
Wind farms have been shown to be capable of complying with the requirements of
frequency response under Grid Codes. However, this technical capability comes at a
significant economic cost owing to spilt wind. Section 2.7 explores whether this
dichotomy between capability and cost will lead to a split in power system development
between generators providing bulk energy and energy storage systems providing
balancing services. There is a strong intuitive link between increasing intermittent power
providers, such as wind farms, and a perceived need for energy storage, so this section
introduces the question of whether energy storage would be a better provider of balancing
services than wind farms.
In view of the potential opportunities for energy storage technologies to be applied as
wind power scales up, section 5.2 explores the different energy storage options. A critical
evaluation of the energy storage technologies addresses the strengths and weaknesses of
each technology. This is followed by an economic analysis of the typical costs of different
storage systems in section 5.3, which breaks down the technologies based on their power
costs and energy costs. The technical and economic comparisons identify that the
Vanadium Redox Flow Battery (VRFB) has the potential to be complementary to wind
power in power system applications.
Given the interest in the VRFB, section 5.4 introduces the technology, its historical
development and further details surrounding its potential application to the power system.

- 120 -
5.2 Energy Storage Technologies
Chapter 4, in part, addressed the frequency response requirements placed on wind farms.
It showed how wind farms could meet the technical requirements of the code, but also
briefly highlighted the economic implication of spilling wind to provide frequency
response reserves. This cost, which could be placed on wind farms, presents a potential
opportunity for energy storage systems. There are a multitude of energy storage
technologies available with different strengths and weaknesses, this chapter therefore sets
out to find the correct technology to address this market need.
As a result of the array of different technologies there are many reviews from academic
sources such as Chen et al. [107] or Ibrahim, Ilinca and Perron [108] as well as from
government sources illustrating the range of interested parties:
• The UK’s Department of Trade and Industry (DTI) [109]
• The US’s Electric Power Research Institute (EPRI) [110]
• The International Council on Large Electric Systems [111]
• The European Parliament’s committee on Industry, Research and Energy (ITRE)
[112].
The Electricity Storage Association [113] takes an advocacy role in promoting the
benefits of all different storage technologies on the power system. These sources, plus
technology specific references inform the analysis of different technology options which
is included in this chapter. Further numerical data, which underpins the technology
comparison, is shown in appendix 9.2, which also lists the references from which the data
was sourced.
5.2.1 Pumped Hydro
Pumped hydroelectric storage takes advantage of specific geographical locations where
natural or artificial reservoirs exist with a significant height difference. Energy is stored in
the potential energy of water pumped into the upper reservoir. In a market based system
pumping typically takes place during low demand and low price periods, with the system
generating during peak demand hours. Typical round trip efficiency of these schemes is
around 75% or less, meaning that significant price differentials must exist in order to
allow economically viable operation purely from energy time-shifting.
The GB system is supported by a significant facility at Dinorwig in Wales, rated at
1.8GW. The greater part of all the energy storage on the GB grid is found at Dinorwig,

- 121 -
which has been running since 1981. It has impressive dynamic properties for such a large
system, being able to reach full output power in only 16 seconds from a spinning start or
75 seconds from a standing start. This allows it to earn revenue from the market for Short
Term Operating Reserves.
Pumped hydroelectric storage is a mature technology with many large scale, long duration
plants in long term operation around the world. Nevertheless, the highly site specific
nature of this storage type has been shown to lead to highly variable economics according
to Deane, Gallachóir and McKeogh [114]. There are some opportunities for further
development of pumped hydroelectric storage in Europe, however, due to the specific
geological features required, these developments are limited.
Pumped hydroelectric projects are typically expensive undertakings, whilst their long
lives, of upwards of 50 years, ultimately ensure that they payback, it has been suggested
by Kazempour et al. [115] that newer technologies such as Sodium Sulphur batteries may
represent better investment opportunities. Furthermore, the long payback periods
associated with pumped hydroelectric may deter new investment.
Advantages Disadvantages
Very high power ratings (GW) possible Limited locations possible
Large energy capacity (GWh) possible High capital cost
Good economics in the right sites May require land use change
Long cycle life Very low energy density
Moderate round trip efficiency
Table 5.1: Advantages and Disadvantages of Pumped Hydroelectric Storage
5.2.2 Compressed Air Energy Storage
Like pumped hydroelectric storage, Compressed Air Energy Storage (CAES) requires
specific geological features, such as salt caverns. Energy is stored as a pressure increase of
gas within a sealed cave or feature and is usually then pre-heated by natural gas prior to
expansion. Operation is typically similar to pumped hydroelectric, with off-peak
compression of gas for use during peak periods; however, the slightly lower efficiency
(~70%) of CAES requires a greater price differential. Furthermore, often caverns suitable
for CAES are also ideal for natural gas storage for the gas network, limiting GB
development opportunities.

- 122 -
Advantages Disadvantages
High power ratings (100’s MW) possible Specific geological sites only
Moderately high storage capacity (100’s MWh)
Sites compete with natural gas storage
Proven at large scale Low energy density
Long cycle life Poor round trip efficiency
Table 5.2: Advantages and Disadvantages of CAES
Two large scale CAES facilities have been developed, 100MW at McIntosh, U.S.A. and
290MW at Huntorf, Germany. These have been operating for two and three decades
respectively, showing that CAES plants typically have longer lifetimes than battery
technologies. This also shows that CAES is a relatively mature technology and is the only
storage technology, other than pumped hydroelectric, to offer GW and GWh scale
technology today.
5.2.3 Conventional Batteries
There are multiple traditional cell batteries, based on different chemistries, with varying
strengths and weaknesses. Divya and Østergaard [116] have addressed the specific
features of cell battery technologies and flow batteries (see section 5.2.4) for application
in the power system and concluded that batteries such as Vanadium redox batteries are
more likely to be used on a large scale than traditional lead acid batteries. Dufo-López,
Bernal-Agustín and Domínguez-Navarro [117] have also looked at these technologies for
application in conjunction with Spain’s wind power and concluded that there would need
to be a subsidy for batteries to become viable in that context, but that Sodium Sulphur
batteries represent the best technology choice. With such differing views, this section
outlines the different battery types.
5.2.3.1 Lead Acid
Lead acid is the oldest of the battery technologies for utility scale energy storage, having
been around for over 140 years. Following the Californian renewable energy boom of the
1970s, there was much interest in Lead Acid batteries for system support. That interest re-
emerged for renewable power smoothing in the late 1990’s. However, the major advances
in higher power and energy density batteries, due in part to the need for portable power in
the communications industry, have led to Lead Acid batteries being technologically
surpassed.

- 123 -
Advantages Disadvantages
Mature technology Limited depth of discharge
Lower capital cost than other batteries Very limited cycle life
Low specific energy
Poor round trip efficiency
High environmental cost
Power and energy ratings inter-linked
Table 5.3: Advantages and Disadvantages of Lead Acid Batteries
5.2.3.2 Nickel Cadmium
Nickel Cadmium is the most common Nickel based battery chemistry, having been
developed in the early 20th century. It was a common rechargeable battery type until being
overtaken by Nickel Metal Hydride in the 1990’s and then by Lithium based batteries.
Cadmium is a toxic and heavy metal with a significant environmental impact. Recent
changes to EU environmental legislation have outlawed the use of Nickel Cadmium
batteries in all but a few specific applications. As such Nickel Cadmium batteries are
unlikely to be deployed further in EU power systems.
Advantages Disadvantages
Mature technology High capital cost
High charge and discharge rates achievable Limited cycle life
Low maintenance Power and energy ratings inter-linked
High environmental impact
Poor round trip efficiency
Table 5.4: Advantages and Disadvantages of Nickel Cadmium Batteries
5.2.3.3 Sodium Sulphur
Sodium Sulphur batteries are one of the leading technologies seeing deployment in power
systems today and have been pioneered since 1983 by Tokyo Electric Power Corporation
and NGK in Japan. These batteries use a molten salt technology, whereby a high
temperature (typically >300°C) is necessary for battery operation. This technology can
achieve improved round trip efficiency compared to older battery technologies, however,
the battery must be continually heated, leading to some self-discharge losses even when
not in use. Additionally, the batteries typically have a long warm up time if they are to be
activated from cold and there are health and safety concerns owing to battery temperature.
Sodium Sulphur batteries do offer high energy density and a very high short term overload
capability. Advertised round trip efficiencies are typically approaching 90%, however,

- 124 -
Xcel Energy’s Himelic and Novachek [118] have reported on the recent trial of a Sodium
Sulphur battery in the U.S.A. and found round trip efficiency varied from 68 to 79%.
Advantages Disadvantages
Very high energy density Continuous heating required
High theoretical round trip efficiency Limited cycle life
High short term overload capability Power and energy ratings inter-linked
Rapidly approaching maturity in large scale
Table 5.5: Advantages and Disadvantages of Sodium Sulphur Batteries
5.2.3.4 Sodium Metal Halide
Sodium metal halide batteries are an alternative form of molten salt battery, again
requiring high temperatures for operation. The most common form is the Sodium Nickel
Chloride battery (also known as the Zebra battery), owing to its operation at 245°C versus
around 400°C for other variants. General Electric moved into the development of this type
of battery following their acquisition of Beta. They have recently developed a facility with
a target to supply up to 900MWh of these batteries per year meaning that this battery type
is moving rapidly towards maturity for commercial applications. It is yet to be seen
whether this technology will be deployed for power system applications as there is a
significant market for telecommunications infrastructure.
Compared to Sodium Sulphur batteries, Sodium Metal Halide is safer under over-charge
or over-discharge conditions but it does not achieve as high energy or power density.
Advantages Disadvantages
High energy density Continuous heating required
High theoretical round trip efficiency Limited cycle life
Short term overload capability Power and energy ratings inter-linked
Rapidly approaching maturity in large scale
Table 5.6: Advantages and Disadvantages of Sodium Metal Halide Batteries
5.2.3.5 Lithium Ion
Small scale Lithium ion batteries have developed rapidly over the last two decades, due
mainly to the rapidly expanding communications industry and the consequent need for
portable power sources. Their high energy density makes them ideal for such applications.
However, safety issues, particularly if the cells are over-charged, punctured or deeply
discharged, and difficulty dealing with heating and life times when scaled up means that
their use for large utility scale systems has developed more slowly. Nevertheless, 2011

- 125 -
saw the deployment of a Lithium Ion based battery storage facility by UK Power
Networks at Hemsby, Norfolk, UK according to Lang et al. [119]
Advantages Disadvantages
High energy density Significant safety risks associated
Very high round trip efficiency Expensive
Difficult to scale
Limited Lithium supplies
Technology development driven by communications and potentially automotive
industries Power and energy ratings inter-linked
Maturing – commercial trials started
Table 5.7: Advantages and Disadvantages of Lithium Ion Batteries
5.2.3.6 Metal Air
Metal air batteries have long held the promise of extremely high energy density, making
them ideal for mobile applications and were investigated by militaries in the 1960s.
Typically air provides oxygen for the cathode reaction contributing to their high energy
density when compared to cells that contain all electrolytes. IBM are developing a Metal
Air battery but don’t anticipate commercialisation until 2020.
Advantages Disadvantages
Very high energy density Very limited cycle life
Very high power density Difficulty with electrical recharging
Low round trip efficiency
Immature technology
Table 5.8: Advantages and Disadvantages of Metal Air Batteries
5.2.4 Advanced Redox Flow Batteries
Ponce de León et al. [120] distinguish redox flow batteries from conventional cells by the
nature of the energy stored. Conventional cell batteries store energy within the battery’s
electrode structure, whilst flow batteries store energy in the form of reduced and oxidised
species which are then circulated through the reaction cell. Fuel cells are different again,
storing energy in the reactants that are external to the cell. This section looks at the
various different redox flow battery types considered by Ponce de León et al.
In general redox flow batteries have the following advantages and disadvantages
compared to conventional batteries:

- 126 -
Advantages Disadvantages
Less mature technology Independently variable power and energy ratings Lower energy density
Longer cycle life
High efficiency
Capable of fast mechanical recharge
Modularity
Table 5.9: Advantages of Redox Flow Batteries compared to conventional batteries
5.2.4.1 Bromine Polysulphide
Bromine Polysulphide flow cells were the basis for the technology demonstrator by
Regenesys at Little Barford in the UK and are based on the following redox couple.
Equation 5.1 −−− ↔⋅−⋅ 323 BreBr where Eo = 1.09V
Equation 5.2 −−− ⋅↔⋅+ 22
24 22 SeS where Eo = -0.265V
Unfortunately, as the demonstrator and subsequent review by the Department of Trade
and Industry [DTI] [121] proved, it was very difficult to avoid membrane breakdown and
cross-contamination of the active species. In this redox flow cell the electrical balance is
achieved by transfer of Sodium ions across a selective membrane. The relatively similar
size of the Sodium ions to the other electro-active species in this reaction cell mean that it
is highly prone to cross-contamination. This cross-contamination in turn necessitates
complete replacement of the chemicals and punctured membrane.
Advantages Disadvantages
Risk of H2S (gas) evolution UK experience gained through Little Barford demonstrator Cross-contamination almost inevitable
Low cost chemicals Sulphur deposition on electrodes
Poor round trip energy efficiency
Table 5.10: Advantages and Disadvantages of the Bromine Polysulphide Redox Flow Battery
5.2.4.2 Zinc-Bromine
The Zinc Bromine flow cell is another flow cell system to have received widespread
research and development interest. It relies on the following redox couple:
Equation 5.3 −−− ↔⋅−⋅ 323 BreBr where Eo = 1.09V
Equation 5.4 ZneZn ↔⋅+ −+ 22 where Eo = -0.76V
The many advantages of this redox couple have been outweighed by practical experience
with unbalanced rates of reaction leading to system polarisation and breakdown as well as

- 127 -
Zinc deposition on the electrodes during charging. These practical difficulties have left
Zinc Bromine systems some way short of theoretical potential. Nevertheless, ZBB Energy
Corporation has been developing these systems and is now marketing systems up to
125kW.
Advantages Disadvantages
Good energy density Low cycle life
Highly reversible High self-discharge
Low cost reactants High cost electrodes
Higher cell voltage Poor energy efficiency
Table 5.11: Advantages and Disadvantages of the Zinc-Bromine Redox Flow Battery
5.2.4.3 All Vanadium
Concerns resulting from the difficulty of avoiding cross-contamination of electrolytes in
other flow battery systems have led to a significant focus on the Vanadium Redox Flow
Battery (VRFB). This type of flow battery uses the same chemicals, Vanadium dissolved
in Sulphuric Acid, on both sides of the cell stack, and this means it is relatively robust
against cross-contamination. Furthermore, the fast kinetics of the Vanadium reactions
leads to higher efficiency than other flow cells. The redox reaction is based on the
following couple:
Equation 5.5 ++−+ ⋅+↔−+ HVOeOHVO 222
2 where Eo = 1.00V
Equation 5.6 +−+ ↔+ 23
VeV where Eo = -0.26V
Prudent Energy has been involved in the commercialisation and sale of VRFBs, deploying
GE Energy’s power conversion business’ power converters, including projects in China
and California.
Advantages Disadvantages
Long cycle life Low energy density
Membrane failures aren’t catastrophic
High efficiency
Membrane costs currently high but falling fast
Can be mildly over-charged
Fast response time
Energy capacity cost is linked to Vanadium cost
Table 5.12: Advantages and Disadvantages of Vanadium Redox Flow Batteries
5.2.4.4 Others
In addition to the utility scale flow batteries mentioned, there are Zinc-Cerium and Iron-
Chromium systems. Zinc-Cerium offers the promise of an environmentally benign system
with higher voltage and current density than other flow cell systems. This system is being

- 128 -
developed by Plurion in Scotland and is at an early stage of development. Further Deeya
Energy is developing energy dense Iron-Chromium flow cells but targeting them at
smaller scale applications, such as telecommunications and defence, rather than utility
power use.
5.2.5 Thermal Storage Systems
An alternative to storing potential energy or chemical energy is to store energy thermally
either in a cryogenic store, or a hot thermal store. Many such systems are in use in order to
displace Heating, Ventilation and Air Conditioning (HVAC) loads at times of peak
demand, but these typically do not convert the stored heat energy back to electricity for
use. Resistance heating or refrigeration are used to heat or cool the store and a heat engine
can be used to recover the energy. The bulk storage medium can typically be a low cost
material ensuring that the underlying cost of materials in a thermal energy store is low.
Thermal storage systems normally have limited round trip energy efficiency although
Isentropic [122] claim to have improved upon typical efficiency levels with a hot gravel
storage system designed to achieve efficiencies in excess of pumped hydroelectric.
However, self-discharge is typically higher than battery storage systems.
Advantages Disadvantages
Long cycle life Low round trip efficiency
Potentially low cost Requires extreme temperature stores
Scalable
Environmentally Inert
Relatively immature for power grid applications
Table 5.13: Advantages and Disadvantages of Thermal Storage Systems
5.2.6 Flywheels
Flywheels store energy as kinetic energy in a rotating mass. Composite materials permit
high speeds allowing greater kinetic energy storage; however, overall energy capacities
are limited. Flywheels are well suited to power applications where high specific power
and peak output capacity are key parameters. High self-discharge means that flywheels are
not suited to storing energy for long time periods.
Beacon Power’s flywheels were amongst the first of the ‘new’ energy storage
technologies to be deployed on the grid, with projects in New York and California in the
USA according to Lazarewicz and Ryan [123]. The 20MW project in New York State is
one of the biggest power quality applications of storage in the world. However, it is likely
that flywheels will be limited in scope to the short time-scale frequency regulation market,

- 129 -
where in time they will be overtaken by other energy storage technologies that provide a
wider range of services to the grid.
Advantages Disadvantages
High specific power Low specific energy
Economically mature High self-discharge
High cycle life Small unit capacities
High round trip efficiency
Environmentally benign
Fast response time
Table 5.14: Advantages and Disadvantages of Flywheels
5.2.7 Supercapacitors
Supercapacitors store energy in the form of an electrostatic field. They offer very high
specific power, but very low specific energy in comparison to other energy storage
technologies. However, they have been proposed by Muyeen et al. [124] to smooth power
fluctuations from wind power due to their high speed of response and low standby losses.
For very short term power smoothing, the high specific power allows a compact and cheap
system, whilst the low specific energy is not a constraining factor. For longer term storage
Supercapacitors are not an option, due to their low energy density and high self-discharge.
Advantages Disadvantages
Very high specific power Very low specific energy
Very high cycle life Moderate self-discharge
Excellent round trip efficiency Power and energy ratings inter-linked
Fast response time Wide operational voltage range
Table 5.15: Advantages and Disadvantages of Supercapacitors
5.2.8 Superconducting Magnetic Energy Storage
Superconducting Magnetic Energy Storage (SMES) stores energy in a magnetic field
created by high circulating currents in infinitely low impedance high temperature
superconducting materials. The lack of moving or chemical components promises very
long cycle lives. However, cryogenic cooling of the superconducting components ensures
that these devices have a significant ancillary load causing low round trip efficiency. The
high cost of superconducting wire and associated ancillaries ensures that the energy
capacities of these systems are typically low.

- 130 -
Advantages Disadvantages
Very high specific power Very low specific energy
Very high cycle life Moderate self-discharge
Excellent round trip efficiency
Fast response time
Table 5.16: Advantages and Disadvantages of SMES
5.2.9 Hydrogen
A study of energy storage would be incomplete without reference to the alternative
viewpoint of using hydrogen as the energy vector in place of electricity. Hydrogen’s
energy density, along with the gradual advance of fuel cells, is particularly attractive for
vehicular applications due to the high specific energy capacity. The challenge in these
applications is ensuring the successful and safe storage of hydrogen at high pressures.
A key challenge facing hydrogen for power system applications is that when electrolyser
fuel cell efficiencies are taken into account, the round trip efficiency of a hydrogen based
system is currently too low (<50%). Such a low round trip efficiency means that it cannot
be economically viable in all but a few niche applications. Furthermore, currently the bulk
of Hydrogen is created by steam reforming Methane, with associated CO2 emissions.
Advantages Disadvantages
High specific energy Very low round trip efficiency
Potentially environmentally benign Requires high pressure storage
High capital cost
Hydrogen currently derived from fossil sources
Table 5.17: Advantages and Disadvantages of Hydrogen
5.3 Energy Storage Economics
The success or failure of different energy storage options will ultimately come down to
their commercialisation and economics. This section relies on the data available in
appendix 9.2 in order to compare the different economic strengths and weaknesses of the
different energy storage options.
5.3.1 Power Costs
Figure 5.1 shows the comparative cost of installed power capacity. As expected, high
power density technologies such as flywheels, SMES and supercapacitors can be seen to
have favourable costs per installed kW. These technologies are well suited to applications

- 131 -
where a short duration pulse of energy is required, but owing to high self-discharge and
very low energy density are not applicable to longer timescale applications. It is notable
that the high power density storage technologies can offer a lower cost of installed
capacity than the mature energy storage technologies of CAES and pumped hydroelectric.
0 500 1000 1500 2000 2500 3000 3500 4000
Hydro
CAES
Lead Acid
Nickel Cadmium
Sodium Sulphur
Sodium Nickel Chloride
Lithium Ion
Metal Air
Zinc-Bromine
Bromine PolySulphide
Vanadium I
SMES
Flywheel
Thermal
SupercapsB
attery
Flo
wB
attery
Oth
er
Tech
no
log
y
Installed Power Cost ($/kW) Figure 5.1: Indicative Range of Power Capacity Costs for Energy Storage Technologies
Amongst the technologies that have moderate or high energy density, the Sodium Nickel
Chloride battery is shown to have a favourable power cost of the commercialised
technologies. Thermal energy storage can also be seen to hold the potential of low cost
power capacity, however the principle developers of these systems (e.g. Highview Power,
Isentropic Ltd.) appear to be at an earlier stage of development than the other technologies
considered here.
5.3.2 Energy Costs
Figure 5.2 compares the cost of the different energy storage technologies for increased
energy storage capacity. This highlights one of the shortcomings of the three power dense
technologies (SMES, flywheels, supercapacitors) in that they have the highest installed
energy costs of all the technologies considered. Furthermore, their low energy density
would lead to unfeasibly large systems for long duration energy storage applications.

- 132 -
10 100 1000 10000
Hydro
CAES
Lead Acid
Nickel Cadmium
Sodium Sulphur
Sodium Nickel Chloride
Lithium Ion
Metal Air
Zinc-Bromine
Bromine PolySulphide
Vanadium I
SMES
Flywheel
Thermal
Supercaps
Battery
Flo
wB
attery
Oth
er
Tec
hn
olo
gy
Installed Energy Cost ($/kWh)
Figure 5.2: Installed Energy Capacity Costs
Once again thermal energy storage can be seen to hold promise, with a relatively low cost
of installed energy capacity that is anticipated to be competitive with CAES and
Hydroelectric systems. Metal air batteries, which are similarly experimental, can be seen
to offer a low cost of energy capacity but are hindered by their very short cycle life
capacities.
CAES and pumped hydroelectric systems can be seen to typically have installed energy
costs that are lower than the various commercialised battery technologies. Depending on
site geology, the installed energy costs of CAES and pumped hydroelectric can be
significantly lower than all but the projected cost of thermal energy storage.
5.3.3 Economic Comparison
The capital cost of an energy storage system is defined by its installed cost of power
capacity and installed cost of energy capacity. The capital cost of a system does not,
however, define the economic merit or otherwise of a system. Different technologies have
significantly different lifetimes and efficiencies, which directly affect the revenue they can
expect to earn and recover the capital costs from. Figure 5.3 shows a comparison of the
different technologies’ round trip efficiencies and shows that cycle life expectations vary
from just a couple of hundred cycles (Metal air batteries) to around 100,000 or more
(SMES, supercapacitors, flywheels).

- 133 -
100.0
1000.0
10000.0
100000.0
1000000.0
Hydro
CA
ES
Lead A
cid
Nic
kel
Cadm
ium
Sodiu
mS
ulp
hur
Sodiu
mN
ickel
Lithiu
m Ion
Meta
l A
ir
Zin
c-B
rom
ine
Bro
min
eP
oly
Sulp
hid
e
Vanadiu
m I
SM
ES
Fly
wheel
Therm
al
Superc
aps
Battery Flow Battery Other
Technology
Min
imu
m C
ycle
Lif
e
0.0%
20.0%
40.0%
60.0%
80.0%
100.0%
120.0%
Ro
un
d T
rip
Eff
icie
ncy
Minimum cycle Life (no. cycles)
Round Trip Efficiency (%)
Figure 5.3: Energy Storage Technologies' Cycle Life and Efficiency
In order to reasonably compare the different technologies it is possible to consider the
capital cost spread over the cycle life of the system. This provides a comparable metric to
the cost of generation from an alternative source and is a method used by the Electricity
Storage Association (ESA).
Equation 5.7
triproundcycles
installedkWh
effectiven _
_
η⋅
Π=Π where ΠkWh_installed is the capital cost of installed
energy capacity (£/kWh), Πeffective is the effective generation cost (£/kWh), ηround_trip is the
efficiency and ncycles is the storage technology’s cycle life.
This effective generation cost from an energy store can be compared to the typical costs of
generating from conventional power plants. Parsons Brinckerhoff [125] in 2006 produced
a report “Powering the Nation” detailing the typical range of power generation costs in the
UK, Parsons Brinckerhoff [126] then provided an update to that report in 2010 to bring
the costs into line with recent experience. A comparison of the different effective
generation costs from energy storage technologies is shown in Figure 5.4. The estimated
costs from conventional generation are shown in Figure 5.5. It should be noted that the
effective generation cost is a simple calculation and does not discount the value of future
revenue, whilst the “Powering the Nation” reports considered a 10% discount rate. The
high capital cost of storage systems, combined with their reliance on future revenue,
would undoubtedly have less favourable costs on a discounted basis. However, without
knowing the application of the energy store, its lifetime can not be assessed, therefore an

- 134 -
appropriate discounting strategy can not be defined. Nevertheless, it can be seen, that
when the effective generation cost is considered, some energy storage solutions can be
seen to potentially offer competitive costs. Furthermore, in chapter 7 a full economic
analysis of the VRFB battery in a specific application with a wind farm is considered.
This does apply a discounting strategy and therefore extends the analysis conducted based
on reasonable lifetime assumptions.
0.001 0.01 0.1 1 10
Hydro
CAES
Lead Acid
Nickel Cadmium
Sodium Sulphur
Sodium Nickel Chloride
Lithium Ion
Metal Air
Zinc-Bromine
Bromine PolySulphide
Vanadium I
SMES
Flywheel
Thermal
Supercaps
Battery
Flo
wB
atte
ryO
ther
Te
ch
no
log
y
Effective Generation Cost ($/kWh)
Figure 5.4: Effective Generation Cost of Storage
0.001 0.01 0.1 1 10
Tidal
Offshore Wind
OCGT (5% Duty Cycle)
OCGT (20% Duty Cycle)
Coal IGCC
Biomass
CCGT
Onshore Wind
Nuclear
Ge
nera
tors
Tech
no
log
y
Effective Generation Cost ($/kWh)
Figure 5.5: Generation Costs from Parsons Brinckerhoff [125], [126]

- 135 -
Amongst the different energy storage technologies, CAES and pumped hydroelectric still
stand out as the best options economically. However, their requirement for specific
geological sites limits their further development. The power dense technologies (SMES,
flywheels, supercapacitors) are competitive for power applications but would be
unfeasibly large for high energy capacity projects. This leaves the VRFB competing with
thermal energy storage for widespread adoption. The VRFB holds a commercialisation
advantage with a number of systems already in deployment, particularly in Japan.
Amongst the conventional battery technologies, the two high temperature technologies
(Sodium Nickel Chloride and Sodium Sulphur) lead the way. However, their effective
generation cost is increased by their currently limited lifetimes. Overall it is worth
tracking the developments in thermal energy storage systems as large scale prototypes are
developed and following high temperature batteries’ life time developments. Nevertheless
the Vanadium Redox Flow Battery will be considered further and in particular for
application in conjunction with wind power in section 5.4.
5.4 Vanadium Redox Flow Battery Development
5.4.1 Historic Development
The invention of the Vanadium Redox Flow Battery (VRFB) is attributed to the work of
Skyllas-Kazakos et al. [127] at the University of New South Wales, Australia. Kear, Shah
and Walsh [128] have recorded the development of the VRFB in detail since then,
showing that whilst the technology originated in Australia, developments since have
focussed on Japan. Sumitomo Electric Industries hold the license for Japan and have
developed at least 16 installations of up to 4MW, 6MWh capacity. Japan’s battery
facilities have benefitted from access to the national feed-in-tariff for renewable energy
generation.
Kear, Shah and Walsh also show that recently research interest has increased in China
following Prudent Energy’s purchase of VRB Power Systems in 2009. China itself has
burgeoning wind and solar sectors which Prudent will undoubtedly try to complement.
Furthermore, Chinese transmission grids are operating at greater than 95% capacity in
many urban areas.

- 136 -
Figure 5.6: The VRFB System
Beyond transmission level applications, Cellstrom GmbH (Austria) markets a smaller
scale VRFB for Uninterruptible Power Supply (UPS) applications. In the UK, Renewable
Energy Dynamics Technology Ltd. (REDT) is marketing VRFB systems in the range
30kW to 150kW.
A typical VRFB consists of two tanks, the cathode tank where V4+ and V5+ ions are stored
in a solution of mild Sulphuric acid, and the anode tank where V2+ and V3+ are stored,
again in Sulphuric acid solution. When the system is primed for operation, these solutions
are pumped continuously through the stack. If the system is to be shutdown for a
significant period of time, the stack is prepared and the pumps switched off. The two
solutions are separated in the stack by semi-permeable membranes. These membranes are
permeable to hydrogen ions but not the other soluble ions. The flow of current is
controlled by the DC voltage applied across the stack. Application of a voltage below the
equilibrium voltage will discharge the VRFB, whilst higher voltages charge it. The basic
chemistry will be explored in more detail in chapter 6. Figure 5.6 provides an overview of
the VRFB system and highlights that the four different Vanadium ion solutions have
different colours. Here the picture illustrates a fully charged system just beginning to
discharge.
Cathode Tank
Anode Tank
V5+ (yellow) V2+ (lilac)
Bipolar Electrode Felt-Membrane-Felt
V4+ (Blue) V3+
(Green)
Pumps
Stack

- 137 -
Typical VRFB performance characteristics are given in Table 5.18, based on appendix
9.2.9. Key to the VRFB’s economic merit is its capability for a high cycle life, which is a
critical precursor to application in frequency response services.
Characteristic Low range High range
Energy Density (kWh/kg) 0.02 0.04
Cycle Life (No. of full cycles) >12,000
Age (years) 10 20*
Round Trip Efficiency (%) 70 85
Power Cost ($/kW) 600 2500
Energy Cost ($/kWh) 200 400
Table 5.18: VRFB Performance Metrics (* with membrane replacement at 10 years)
5.4.2 Present Application
Prior to the financial crisis, Tapbury Management Ltd. et al. [129] were planning a large
scale VRFB deployment on the Sorne Hill wind farm in Ireland. The purchase of VRB
Power Systems by Prudent Energy in 2009 appears to have ended this interest; however, it
shows an underlying interest in storage technologies. Furthermore, Ireland’s grid with low
interconnection capacity and increasingly high wind power penetration is perhaps a
microcosm of where the mainland GB grid is heading.
Elsewhere, Prudent Energy and GE Energy Power Conversion recently deployed a
500kW, 2MWh battery in China according to Gray and Sharman[130].They also have a
large scale industrial project in California, showing the rising international interest in flow
batteries and energy storage in general. The challenge is to advance the technology to
megawatt scale deployments.
5.4.3 Future Advances
One of the limiting factors of the VRFB today is that it has relatively low energy density.
This means that tanks must be large and that pumps have to run at higher speed to ensure
that the electrolyte circulation is sufficient to support high powers. This higher pump
speed in turn leads on to higher ancillary loads and lower round trip efficiency. In recent
years the VRFB’s originators, Skyllas-Kazacos et al. [131], have turned their attention to
solving these twin problems. They propose using Vanadium Bromide in both half cells,
which has the potential to almost double the energy density, opening up mobile
applications.
Alongside development of alternative chemistry, Skyllas Kazakos et al. have also been
investigating the performance of the original VRFB with lower cost membrane material.

- 138 -
The round trip efficiency of 80% reported suggests that this research is proving effective.
Both research streams suggest the continued development of the VRFB towards
widespread commercial application.
5.5 Summary
The Vanadium Redox Flow Battery has been shown to be well suited to meeting the
requirements of smoothing wind output, time shifting energy and providing fast frequency
response services.
Chapter 4 showed the technical control methods that allow wind farms to contribute to
frequency control of the National Grid. However, despite the technical capabilities in this
area, the economic case is unfavourable. Section 2.7 showed that this could present an
opportunity for energy storage. The expected increase in required GB frequency response
holdings combined with the loss of responsive plant is anticipated to lead to a significant
shortfall which could be filled with energy storage. Furthermore, this section shows that
there are a number of storage companies looking at the opportunities that frequency
response markets will provide globally. Nevertheless, realistic commercial application of
energy storage is likely to depend on aggregation of benefits and this section suggests the
combined aggregation with providing energy time shift to peak demand periods.
Section 5.2 then critically analyses the different energy storage technologies available,
leading on to an economic comparison in section 5.3. This shows that high power density
energy storage technologies (SMES, flywheels, supercapacitors) offer a competitive
solution in low energy applications, but that in higher energy capacity applications the
optimal solutions are the Vanadium Redox Flow Battery and thermal energy storage
systems.
Section 5.4 shows that the VRFB has been widely applied today, but also that there is
significant research that may lead to improvements in its commercial viability in future.
As such it is worthy of detailed consideration.

- 139 -
6 Modelling of Vanadium Redox Flow Batteries
6.1 Introduction
Chapters 3 and 4 of this thesis developed models and control strategies that enhanced full
converter wind turbines’ capability to meet the requirements of Grid Codes. This work
included control methods allowing a wind turbine to provide frequency response reserves
and power regulation up and down in response to system frequency changes. However,
they also illustrated that the margin for low frequency response, from intermittent wind
resources, is critically dependent on the prevailing wind conditions. Furthermore, whilst
improved control methods to allow synthetic inertial response were presented, there
remain concerns over the capacity of wind turbines to recover following a period of
temporary over-production.
The limitation on the capability of wind power to secure the frequency stability of the GB
transmission system potentially presents an opportunity for energy storage. Chapter 5
therefore explored the different energy storage technologies available and their
applicability to providing frequency response services and operating with wind power. It
highlighted the potential of the Vanadium Redox Flow Battery (VRFB) to operate across
different time-scales and compliment wind power and the power system, whilst being a
commercially favourable option. Chapter 6 therefore focuses on the VRFB and its
integration into the power system.
First, a model of the VRFB, appropriate for power system representation, is developed in
section 6.2. A model of the power electronics representing the interface between the
VRFB and the grid is then developed in section 6.3. The representation of the VRFB is
shown to be valid by comparison with published data in section 6.4, whilst simulations are
used to demonstrate the effectiveness of the VRFB controller in section 6.6. Overall, the
chapter presents a novel simplified model of a flow battery for use in power system
applications. Incremental changes to the power converter grid fault control schemes are
then developed based in part on knowledge from the grid integration of wind turbines, but
novel in application with energy storage. Finally, the controller, developed for
management of the VRFB state of charge and frequency reserves, shows how energy
storages’ many potential applications can be managed in a single controller.

- 140 -
6.2 VRFB Electrochemical Model
VRFB energy storage would be integrated with the grid through a power electronic
interface as illustrated in Figure 6.1. Therefore to a first approximation, from a power
system perspective, the energy store can be considered to be an ideal current source
behind an inverter. However, this would neglect the VRFB’s round trip efficiency, state of
charge or finite energy storage and power capacities, which are critical to the economic
provision of frequency response reserves. In order to accurately assess the VRFB’s
capability for operation with a wind farm it is necessary to develop a model of the VRFB
which simply represents these features for power system application. Section 6.2.1
investigates the typical level of detail in a full representation of a VRFB before section
6.2.3 extends the existing literature on simplified models in order to meet the minimal
requirements for the power system model.
Figure 6.1: Summary of VRFB Integration
6.2.1 Fully Detailed
The University of Southampton has long been at the forefront of the UK’s interest in flow
batteries and in conjunction with Brunel University were involved in the Regensys project
discussed in section 5.2.4. Shah, Watt-Smith and Walsh [132] from this group have
presented the first significant work on modelling the fundamental behaviour of a VRFB.
Their work aimed to provide a model that assisted commercialisation of flow batteries by
minimising the required laboratory tests associated with long term effects such as
membrane fouling and electrolyte stability.
In order to investigate these effects, their model relies on fundamental chemical behaviour
and equations and was validated against a small scale VRFB. However, it relies on a

- 141 -
complex representation of the transport and circulation of the charge carriers, focussing on
the relationship between the coupling of fluid dynamics and electrochemical phenomena.
As such, this approach to modelling of the VRFB is unnecessarily complex for a power
system representation. However, Shah, Watt-Smith and Walsh’s work does demonstrate
that the chemistry defining a VRFB’s electrical behaviour is ultimately governed just by
the two reaction equations:
Equation 5.5 ++−+ ⋅+↔−+ HVOeOHVO 222
2 where Eo = 1.00V
Equation 5.6 +−+ ↔+ 23VeV where Eo = -0.26V
This work has been replicated by You, Zhang and Chen [133] and described as a simple
model, however, it leads to a model that is applicable to a single cell, with voltage of
approximately 1V and negligible energy storage capacity. For power system application,
typically at least fifty cells are stacked in series in order to give a reasonable output power
level with a higher voltage whilst the current is kept lower. Consequently, this model is
inappropriate for a power system model, but does demonstrate that a simple approach just
representing the electrical output, but based on the underlying chemical equations, but
assuming ideal fluid dynamics, ought to be possible.
6.2.2 Fully Simplified
When considering an energy store, modelled to the simplest possible degree, it may be
considered to be a high value capacitance connected to the grid through a power electronic
converter. The capacitor may have maximum and minimum permissible voltage levels
which set the maximum and minimum state of charge. Any energy stored or discharged
from the capacitor then causes a change in voltage owing to the underlying Equation 6.1.
Equation 6.1 2
2
1VCE ⋅⋅=
Such an approach is useful where the technology of the energy storage medium is
irrelevant to the simulations being conducted. However, it is at best limited to a static
representation of a system’s round trip efficiency and therefore is not appropriate for
applications where the energy losses are of interest. As the VRFB efficiency is
considerably lower than unity and is also dependent on the power output, a more detailed
model for representing the VRFB is beneficial.
6.2.3 Power System
Blanc [134] has studied the modelling of VRFBs extensively and in his thesis builds up
the complex chemical theory in chapter 2 before developing a simplified model in chapter

- 142 -
3. His model depends only on the physical parameters of the system and outputs the
voltage across the VRFB; it depends on the following parameters:
• The initial electrolyte and acid concentrations.
• The tank volumes.
• Electrolyte flow rate.
• Ambient temperature.
• The number of series cells.
• The system current.
This makes it more relevant to power system application, particularly if the flow rate and
temperature are constant. Figure 6.2 shows the outline of the structure of Blanc’s model.
Figure 6.2: Mathematical Model of VRFB from Blanc [134]
This model structure can be readily understood in conjunction with the physical system
shown in Figure 5.6.
• First, the “Tank concentrations” of the Vanadium ions can be derived directly from
the current and initial ion concentrations. This is done according to the general
formula in Equation 6.2, where the concentration of V2+ and V5+ rise with positive
current (charging) whilst the concentration of V3+ and V4+ fall and vice versa for
negative current (discharging).
Equation 6.2 [ ] [ ] ∫ ⋅⋅±= ++dtI
FVV
stackinit
x
tc
x 1
This equation uses the current integral to calculate the change in charge based on
the law Q = It. [Vx+] represents the concentration of the x+ Vanadium ions, []tc
represents the instantaneous tank concentrations and []init initial values; F is the
Q - Electrolyte flow rate (l/s) Ccell - Electrolyte cell concentration (mol/l) Istack - Cell current (A) SoC - State of charge Ctank - Electrolyte tank concentration (mol/l) CH+ - Hydrogen ion concentration (mol/l) T - Ambient temperature (K) Uloss - Internal voltage loss (V) Ustack - Output voltage (V) E - Open circuit potential (V)

- 143 -
Faraday number, which is in C/mol and converts the change in individual charge
numbers (Q) to a change in molar concentration; finally, Istack is the VRFB current.
• The tanks contain the vast majority of the entire electrolyte in the system for a
large VRFB; hence, measurement of the concentration of the Vanadium ions in the
tanks allows a reasonably accurate measurement of the system’s state of charge. In
practice this information can be inferred from the voltage of an open-circuit test
cell connected across the tanks, however this measurement can directly use
calculated concentrations in the power system model. Hence, the “State of charge”
(SoC) block calculates the charge level according to Equation 6.3 and as the
membrane is assumed ideal, both half cell SoC’s should balance.
Equation 6.3 [ ]
[ ] [ ][ ]
[ ] [ ]++
+
++
+
+=
+=
54
5
32
2
VV
V
VV
VSoC
• The actual “Vanadium concentrations” in the stack will differ from the tank
concentrations, as beyond the physical input point of the pumped electrolytes to
the stack, the reaction will be proceeding and ion concentrations changing. To a
first approximation the stack (or reaction) concentrations can be modelled as the
mean of the input (≡ Tank) and output concentrations. The change in Vanadium
concentration through the stack is itself a function of the fluid flow rate and the
VRFB current according to Equation 6.4.
Equation 6.4 [ ]QF
INV stackcellx
⋅
⋅=∆ + where Ncell is the number of series cells and Q is
the fluid flow rate in mol/s.
Hence, the stack concentration can be represented as:
Equation 6.5 [ ] [ ]
⋅
⋅±⋅⋅= ++
QF
INVV stackcell
tc
x
s
x 22
1 where []s is the average stack
concentration.
• Equation 5.5 shows that as the VRFB is charged, H+ ions are liberated, pushing up
the “Protons concentration” and hence acidity of the electrolyte. This in turn
influences the equilibrium voltage of the cells. However, this equation shows that
the acid concentration climbs linearly with the increase in [V5+], meaning that the
acid concentration can be readily calculated from its initial condition and the
concentration change in [V5+].
• The “Nernst potential” calculates the electrode potential of the reaction under
equilibrium conditions according to the effective stack concentrations of the

- 144 -
participating ions and the standard potential. This potential is multiplied up by the
number of cells in series according to Equation 6.6.
Equation 6.6 [ ] [ ]
[ ][ ][ ]
⋅
⋅⋅
⋅+⋅=
+
+
+
++
3
2
4
5
lnV
V
V
HV
F
TRENE
std
cells
Estd is the standard potential produced by this reaction under equilibrium
conditions. R is the gas constant (8.31J/K.mol) and T the ambient temperature,
which is here assumed to be constant at 293K owing to the likelihood that large
installations would be temperature controlled.
• The reaction in a VRFB will be driven away from equilibrium by the stack
voltage; this is dealt with in Blanc by the “Internal losses” block. This block
modifies the equilibrium electrode potential according to the various internal
resistances (membrane, electrodes and bulk fluid) and the activation over-
potentials associated with the energy of activation of the reaction and the
circulation of ions. Rather than mathematically calculating these losses, here these
losses have been modelled in the resistance and diode elements of the physical
model as shown in Figure 6.3, these values have then been tuned to match the
output voltage profile and round trip efficiency characteristics.
Figure 6.3: VRFB Physical Model
This electrochemical model represents the combined output of the VRFB, which itself
consists of a number of series cells. This feeds into a DC-DC boost power electronic
converter for connection to the DC link of an inverter and through to the grid.
6.3 Electrical System Model
Equation 5.5 and Equation 5.6 show that under standard conditions, the potential across a
VRFB is only around 1.3V. Figure 5.6 also showed that bipolar electrodes may be used in
the cell stack, effectively allowing multiple cells to operate in series. This series operation
permits the VRFB’s voltage to reach around 200V today with a target to double this,
E Vdrop_discharge
Vdrop_charge
Rdischarge
Rcharge
Istack

- 145 -
leading to lower currents for power applications. Nevertheless, this voltage is DC, not AC,
and too low for optimal grid integration.
Arulampalam et al. [135] have proposed the integration of a battery energy store onto the
DC rail of a STATCOM for power quality improvement on a wind farm. According to
Smith, Hayward and Lewis [136] some wind farms require STATCOMs in order to meet
the reactive power requirements at the grid connection point, this option therefore
provides an optimised solution for the integration of energy storage with wind power.
However, as Arulampalam et al. were focussed on the stability improvement of the wind
farm, they did not consider the voltage requirements for connecting the battery onto the
DC rail or else may have considered higher voltage battery technologies.
6.3.1 Step-up Converter
Figure 6.1 shows that the VRFB is connected through a DC-DC converter, which raises
the DC voltage level, before supplying the DC link of an inverter. Use of this DC-DC
converter allows connection to the grid with the same power converter topology as is used
for a wind turbine. This in turn permits minimal modification in order for the VRFB’s
power converter to be compliant with the rigours of Grid Codes.
Figure 6.4: VRFB Power Converter Interface
Figure 6.4 shows the configuration of the network side inverter and the boost converter. It
illustrates that the standard two-level converter used for wind power applications can have
the ‘machine bridge’ reconfigured such that the three IGBT phases act in parallel through
independent smoothing reactors to supply the controlled voltage across the VRFB. This
parallel operation of the IGBT phases allows the high current, low voltage operation of the
VRFB to be met as it turns the circuit from a three phase rectifier into a single phase boost
converter with current capacity three times that of a single IGBT. Note, however, a
smoothing capacitor is required across the VRFB to ensure the controlled voltage quality.

- 146 -
There are, however, limitations of this circuit including the high device count, owing to
the paralleled operation of IGBTs within the boost converter. This is currently necessary,
owing to the low operating voltage (~200 to 400V) of the largest VRFB systems, as the
IGBTs are limited by current capacity. Additionally, the three parallel IGBTs have to be
matched by three parallel smoothing inductors, leading to a hardware system that uses
standard components but is not topologically optimal. The typical AC side voltage is
~400V, necessitating a step up transformer for connection to the grid.
Figure 6.5: VRFB Boost Converter Performance from Gray and Sharman [130]
Figure 6.5 shows the output voltage and current from a VRFB and is taken from Gray and
Sharman’s [130] presentation on a Prudent Energy and GE Energy development in China.
This shows that the ripple in the output voltage is minimal and is at a high frequency
compared to the VRFB’s response time. The current output can be seen to have a slight
residual ripple from the three phase displaced currents through the smoothing inductors
despite the smoothing capacitor, but again this is minimal and does not adversely affect
the VRFB’s operation.
Overall, as VRFBs currently represent bespoke project developments, there is a need to
avoid new product development and this circuit has been shown to permit the minimal
modification of a wind turbine converter and reuses a hardware system that has been
extensively proven in the field.
6.3.2 Power Converter Model
As with a wind turbine, representing the DC-DC boost converter, common DC link and
network side inverter with switching models of the IGBTs would lead to a slow and

- 147 -
cumbersome model. Therefore, as in that case, it is proposed to use ideal voltage source
representation of the IGBT bridges and to couple them mathematically using power
balance calculations. This representation is shown in Figure 6.6 and allows a significantly
faster simulation model than full detail would permit.
Figure 6.6: Simplified Model of the Boost Converter and IGBT SVC
6.3.3 Ancillaries
The VRFB has a significant ancillary load predominantly providing power to the pumps
that circulate the electrolyte through the stack. These pumps represent a significant
constant power drain on the VRFB as the low energy density of the electrolytes means
that they must be circulated at relatively high flow rates to ensure the ion concentrations in
the stacks are optimal. Additionally power must be provided to the associated control
circuits. The development described by Gray and Sharman [130] had a 500kW power
rating so was of significant size compared to earlier demonstration work, the ancillary
load provided a constant power draw of approximately 1/6th of the total rating. This value
is used here for the ancillary loading as it is anticipated that larger installations will exceed
this performance and hence it provides a conservative middle-ground between the high
ancillary loads of current small installations and the potential to lower this with very large
installations.
6.3.4 Wind Farm
Connecting energy storage with wind farm level reactive power compensation equipment,
as proposed by Arulampalam et al. [135], presents one obvious location for energy storage
within a wind farm. Such a scheme might be configured as in Figure 6.7, with a VRFB
operating at an improved 400V DC and connecting to the grid at 690V. The example
presented represents an offshore wind farm, as these wind farms will certainly be large

- 148 -
enough to be captured by the frequency response requirements of Grid Code (these
offshore wind farms are typically greater than 50MW capacity or even larger) according
to National Grid [78].
Figure 6.7: Integrated VRFB and Wind Farm Single Line Diagram
6.4 Model Validation
As with the wind turbine model, new components of the flow battery model have been
validated. Bindner et al. [137] have conducted an extensive long-term practical evaluation
of a small scale (15kW, 120kWh) VRFB by Prudent Energy and published significant
results. Some of the key results presented there are used to validate the VRFB model
developed here. As the VRFB systems are modular systems, relying on modules of this
size to build larger systems, validation of the electrochemical stacks model against this
data gives a good approximation to likely performance of much larger systems.
6.4.1 Software
The flow battery model has been implemented in both DIgSILENT PowerFactory and
Matlab-Simulink. The Matlab-Simulink model is better suited to modification and tuning
of the power converter and state of charge control loops, however, it is too slow to allow
long time scale studies with a high energy capacity VRFB. As an alternative, the model
has also been implemented in DIgSILENT PowerFactory which allows longer time-scale
studies and ready integration with the earlier developed model of a wind turbine to
represent a complete wind farm with energy storage. The model outputs have been
400k
33kV
690V
Transmission Grid
IGBT SVC and VRFB
132k
33kV
Wind Turbine Model
Offshore Cable
690V
132k
33kV
Collector Cable

- 149 -
compared to confirm that they match and the validation plots shown here are from the
DIgSILENT model.
6.4.2 Flow Battery Voltage
145
150
155
160
165
170
175
180
185
190
-40 -20 0 20 40 60 80 100 120
State of Charge (%)
EM
F (
V)
Figure 6.8: VRFB Voltage according to Bindner et al. [137] (Top) and Model (Bottom)
Figure 6.8 shows the DC open circuit voltage across the VRFB at various different state of
charge levels. The top plot shows the reported results from Bindner et al. The maximum
and minimum states of charge (SOC) reported here are outside of the nominal operating
range (<0% and >100%) representing a load level beyond that of the battery’s normal
operational limits. Bindner et al. state that this is due to the difference between the SOC

- 150 -
reported by the battery (which is an interpolation of various data points and is shown in
the plot) and the theoretical state of charge as calculated from the state of the battery.
The application of the VRFB to providing frequency response services with a wind farm
is likely to involve repeated charge and discharge cycles, as such; it is not acceptable to
allow the state of charge of the flow battery to exceed the nominal operating range as this
would rapidly degrade the VRFB’s lifetime. Furthermore, as the voltage drops, the
constant power current increases, hence at low states of charge the current for rated power
would be at a maximum. The power converter would be optimally sized for rated power
capacity at the lowest nominal state of charge; hence, at the low end of the range the
power converter’s current limit would lead to reduced output power. Hence, the battery’s
reported state of charge would be used in order to ensure operation within the designed
limits of SOC. This means that the model needs only replicate the voltage profile in the
nominal state of charge operating range and not the extended range.
As a result of some of the underlying assumptions in simplifying the VRFB model, the
physical molar concentrations of Vanadium ions do not directly correspond to the
concentrations applied in the Nernst equation to calculate the open circuit potential. As a
result, the five underlying concentrations (four Vanadium ion concentrations and the acid
concentration) have been tuned to optimise the match between the VRFB output and the
model output; this is a quick manual process that only affects the initial concentrations
and not the magnitude of changes in concentration of the various ions. Figure 6.8 shows
the result of a tuned electrochemical model across the normal state of charge range for the
VRFB. The validation plot shows that the slight non-linearity in the voltage profile has
been replicated and that at all states of charge the open circuit voltage is well within 3% of
the expected value and is normally within 1.5%.
This voltage to state of charge profile also highlights the current output variation that can
be expected from the VRFB. As the power converter will operate to ensure that the battery
provides a constant power output, the boost converter current will increase by more than
10% as the battery state of charge drops from its rated level.
The non-linearity in the voltage profile also helps to show the benefits of a limited
operating range. As the SoC approaches full charge, the voltage increases more steeply,
hence the power converter voltage rating would have to increase significantly to provide a
limited additional capacity for operation at higher states of charge. Conversely, as the SoC
reaches the lowest nominal level, the voltage drops more severely, indicating that the
power converter’s current rating would have to increase substantially to provide limited

- 151 -
additional power capacity from lower states of charge. Overall, the optimal system will be
developed and the model agreement has been shown to be acceptable based on less than
3% difference in the model and output voltage across the entire operating range.
6.4.3 Round Trip Efficiency
0
10
20
30
40
50
60
70
80
90
100
0.0 20.0 40.0 60.0 80.0 100.0
Power (% of Capacity)
Ro
un
d T
rip
Eff
icie
ncy
(%
)
VRFB Stacks
Full System
Figure 6.9: Energy Store System Round Trip Efficiency according to Binder et al. [137] (Top) and
Model (Bottom)
The top plot in Figure 6.9 shows the practical efficiencies achieved with constant power
charge and discharge cycles. The two plots’ x axes have been approximately aligned to
allow quicker cross referencing. The gold coloured plot shows the round trip efficiency
from the electrochemical part of the flow battery system (stacks, membrane and stack
concentration changes). This agrees well with the modelled round trip efficiency, shown

- 152 -
by the blue line in the lower plot. This validates the efficiency of the electrochemical part
of the model.
Bindner et al. noted the low efficiency of the power converter in their installation (<85%
round trip). This in part is due to its smaller scale (15kW) when compared to the systems
typically supplied for commercial applications. However, their power converter also
suffered very poor response times, suggesting that the design was poor. Furthermore, the
total auxiliary load on the 15kW system represented a higher proportion of rated output
than would be the case for a larger scale system. As a result the electrical model represents
the typical commercial system, with the ancillary load set according to that experienced
for real applications where the load was approximately 1/6th of the rated power. This leads
to a higher round trip efficiency for the full system model of a large scale VRFB (lower
plot, magenta) than the measured round trip efficiency on the small scale demonstrator
(top plot, blue). This is in line with claims that the efficiency of VRFB systems will
improve with scale but is still lower than the average 70-85% range projected in Table
5.18, which is the range widely predicted in the literature.
The overall round-trip efficiency plot illustrates the need to consider the dynamic
efficiency. The non-linearity in efficiency means that in a real world application,
particularly in conjunction with an intermittent resource such as wind power, the
instantaneous losses will vary widely. Overall, this representation of round trip efficiency
will provide an accurate projection of likely VRFB commercial performance.
6.5 Converter Control System
Parts of the following two sub-sections of the thesis, covering control of energy storage
and wind farms, have been written up as a peer reviewed journal article and accepted for
publication in IEEE Transactions on Power Systems by Banham-Hall et. al. [138].
The electrical interface to the grid has been shown to use the same hardware, but in a
different topology, as a full converter wind turbine. However, whereas a wind turbine
operates only as a generator, a flow battery can operate either as a generator or as a load.
Furthermore, the flow battery has a finite energy capacity which must be managed in
order to avoid over-charging or under-charging the battery. These differences mean that,
whilst there is some cross-over with the control scheme of a wind turbine, some parts of
the power converter control software must be modified.

- 153 -
6.5.1 Converter Control Scheme
Figure 6.10: Power Converter Control for VRFB
It has already been discussed in section 6.3 that the VRFB would be connected to the DC
link of a power converter. This power converter in turn could be essential for meeting a
wind farm’s reactive power control requirement. As such, the network bridge must be
capable of operating independently of whether the battery is charging or discharging or
even connected. This means that the network bridge controller must follow the
conventional control scheme from section 3.5.1.1. The network side converter must be
responsible for controlling the power converter’s DC link voltage as well as the grid’s
reactive power requirement in order to ensure that the DC link stays within operational
limits. This is clear in Figure 6.10 as the general structure of the network bridge control
part is identical to the wind turbine application. Furthermore, by avoiding using the VRFB
to control the DC link voltage, micro cycles and voltage noise will not lead to battery

- 154 -
degradation as the battery will only charge or discharge according to an external set-point
and not grid disturbances.
The DC boost converter receives a single control reference as a power set-point from the
battery controller. The controller in Figure 6.10 then converts this power reference set-
point into a current reference for the flow battery and controls the VRFB voltage. By
controlling the voltage relative to the chemical equilibrium voltage of the flow battery (see
Figure 6.8) the current can be controlled. This power to/from the VRFB will be supplied
to/from the common DC link, leading the network bridge’s DC link controller to modify
the power to or from the grid in order to maintain a constant DC link voltage.
Whilst it is necessary to control the DC link voltage from the network, the VRFB offers
the potential to support the reactive power compensation capability of the network bridge
under certain situations. With a conventional IGBT based SVC, when the grid voltage is
very low (<15% of rated) the IGBT SVC is unable to draw sufficient real power from the
grid to compensate the converter’s ancillary load and switching losses, owing to the
IGBTs’ current limit. This means that the converter’s reactive current capacity is reduced
as a greater proportion of the converter’s current rating is used for real power import to
compensate losses. A typical example of this limitation would be the ability of the power
converter to continuously supply reactive power into a severe low voltage fault (until the
fault is isolated). The losses of the converter would lead to a falling DC link voltage until
the converter’s modulation depth limit is reached and it could no longer supply reactive
current into the fault.
If an IGBT based SVC is equipped with an energy store the operational envelope of the
power converter can be extended to allow supply of rated current at all voltages below
unity with the energy store compensating for converter losses at low voltage. In order to
achieve this, control of the DC link must pass from the network bridge to the boost
converter under low voltage conditions.
Figure 3.13 shows the DC link controller block diagram, this controller typically works
because an approximation can be made between the DC current and the AC q-axis current
because of the per unit power balance between the AC and DC sides of the bridge, the
inaccuracy in the approximation is then covered by the integral gain of the controller:
Equation 6.7 dcdcql
IVIV ⋅=⋅⋅3
Equation 6.8 dcq II ≈ as the modulation depth is nearly 1.

- 155 -
However, under grid faults, this power balance no longer stands as the AC side voltage is
reduced and the modulation depth is very much less than unity. The power is reduced by a
factor of (in per unit terms):
Equation 6.9
f
f
V
V−1
So, if the error in the DC link controller is scaled by the inverse of Equation 6.9 then the
power balance will approximately hold.
This can be achieved with the feed-forward shown in Figure 6.11, which acts to modify
the VRFB current reference. The feed-forward operates on Iq_lim, the DC link controller
wind up, and scales it such that at very low voltages the feed-forward is greater (Vf is the
fault voltage). By operating on the wind-up of the DC link controller, the network bridge
continues to maintain some control over the DC link voltage, within the bounds of the
current limit of the power converter.
Figure 6.11: Low Voltage Ride-through Controller
6.5.2 Grid Fault Ride-through Simulations
Figure 6.12 shows the response of the system to a zero voltage grid fault on the primary
side of the VRFB system’s transformer, with the retained voltage (Vg) measured across
the secondary. Prior to the grid fault the energy store was charging and therefore acting as
a load. At the onset of the fault (t=16s) the power output (P) of the system is rapidly
reduced to zero as the entire current capacity of the network bridge is provided for
reactive current output. Note in this example that the base power used is the power rating
of the VRFB, which itself is rated at half the apparent power rating of the IGBT SVC. The
network bridge reactive current (Id) therefore increases to rated current at the onset of the
fault. The suppressed network voltage means that the total reactive power (Q) provided is
well below the rated limit. The successful operation of the DC link control feed-forward
can be seen as the VRFB stops charging (Pvrfb) and discharges slightly to compensate the
ancillary load thus helping to maintain control over the DC link (Vdc). The fast response

- 156 -
of the VRFB means that the transient change in DC link voltage is minimised and would
not cause a problem for the power converter.
When the fault recovers, a significant transient is seen in reactive power owing to the
increase in voltage and rated current output before the reactive current reference is
reduced. This in turn leads to a transient in the real power output as the current controller
regains control over the d and q axis currents. However, overall the VRFB when operating
as a load is shown to ride-through the fault and ramps power back to its original state once
the system has recovered from the fault, but the control is slightly under-damped.
The fault simulated is well beyond Grid Code limits (4s as opposed to 140ms), but it
serves to illustrate the benefit that the DC link control provides to the operation of the
power converter. Full reactive current output is maintained through the fault and the DC
link voltage is controlled. The energy store is therefore acting to supply the converter’s
losses and prevent a DC link voltage fall.
Figure 6.12: GFR of Energy Store as a Load
Figure 6.13 shows that the VRFB system also successfully rides through this fault when
the flow battery is initially operating as a generator rather than a load. The performance of
the system can be seen to be near identical, with only the DC link voltage transients

- 157 -
showing a significant deviation from the previous case, as the VRFB reduces its output
but remains supplying the power converter through the fault.
The control strategy of the power converter has been shown to offer excellent dynamic
control. The enhanced DC link control allows the power converter to provide reactive
power through even the most severe faults, by transferring DC link control to the flow
battery’s boost converter. This would provide a further benefit over an independent IGBT
based reactive power compensation device.
Figure 6.13: GFR of Energy Store as a Generator
6.6 Wind Farm and VRFB System Control
Figure 6.14 shows that the natural arrangement for connection of a VRFB with a large,
transmission level AC connected, wind farm. This arrangement has also been proposed by
Wang et al. [139] who consider a wind farm of FF-PMG type wind turbines with a VRFB
for power smoothing. As is the case in their application, the power converter offers both
real and reactive power support to the grid. However, Wang et al. do not consider the
control of the battery state of charge and show only the simulation of a smooth output
power profile over a relatively short time period, furthermore, they do not consider the
frequency response capability.

- 158 -
This configuration of wind farm and VRFB allows the store to aggregate several benefits:
• The VRFB can be used to smooth wind power output and compensate for forecast
errors to ensure that the wind farm meets its production target.
• The VRFB can offer frequency response services to the grid on behalf of the wind
farm, thus earning additional revenue and avoiding the need for the wind turbines
to offer this service.
• The energy generated by the wind farm can be stored at times of low demand and
price and released at times of high price (arbitrage).
To take advantage of these opportunities, the control scheme must be designed in such a
way as to ensure that the Grid Code requirements for frequency response, the market
requirements for energy trading and the battery’s state of charge are all optimally
controlled.
Figure 6.14: VRFB Integration with a Wind Farm
For the purposes of modelling the VRFB a single typical offshore wind farm design has
been modelled with a VRFB in DIgSILENT PowerFactory, according to the diagram in
Figure 6.7. The wind farm is sized at 300MW and is represented by a single lumped
turbine model, which is driven by real wind speed data from the large Horns Rev offshore
wind farm. A variety of different power and energy rating VRFBs have then been
modelled at the onshore connection point. This model forms the basis for simulations of
the energy store behaviour in this chapter and in the multiple scenarios run as part of an
economic analysis in chapter 7.

- 159 -
6.6.1 Output Smoothing
Section 3.5.3 described the role and purpose of a wind farm main controller and described
how such a scheme can help to ensure that a large scale wind farm can offer the functions
of a conventional power plant. Such a centralised controller acts as an aggregator of the
wind turbines’ output, receiving a measure of their available power and dispatching real
and reactive power (or voltage) operating points to the turbines. In normal operation such
a scheme would typically track the available power for the whole wind farm to maximise
output. The wind farm’s intermittency is then typically accommodated by the electricity
supplier with the wind farm holding a power purchase agreement for the whole wind
farm’s output [140]. The electricity supplier currently then balances wind’s intermittency
with other generators, however, as wind power’s contribution to the UK grid expands this
may become impossible and wind generators will themselves become exposed to the cost
of their imbalance.
If the wind farm is equipped with an energy store, such as a VRFB, its control can be
integrated with the wind farm main controller to minimise the imbalance between forecast
output and actual output. In this work, the wind farm main controller generates a simple
persistence forecast, whereby the output at a certain time in the future is assumed to be the
average of the output over the recent past, as in Equation 6.10, according to the method of
Bludszuweit, Dominguez-Navarro and Llombart [141]. This method is comparable to
more complex forecasting techniques over short time horizons.
Equation 6.10 ∑−
=
∆⋅−⋅=+1
0
)(1
)|(n
i
forecasttitP
TtktP where T is the total time period
averaged, k the time into the future that the forecast is for, ∆t is the time step of the
samples and n the number of discrete power measurements to be averaged.
Based on the forecast output the wind farm would then have a contracted output power
profile for a given half-hour settlement period. Thus the wind farm can be dispatched to
track the available power whilst the VRFB is dispatched to output the difference as shown
in Figure 6.15 according to Equation 6.11.
Equation 6.11 ∑=
−=N
n
navailforecastVRFBrefPPP
1
,_
The VRFB would not be likely to be sized to accommodate a 100% error in forecast
output. In fact the natural limit on the VRFB size could be affected by the power
converter, which for meeting reactive power requirements at the wind farm’s connection
point would have a maximum apparent power rating equivalent to 33% of the wind farm’s

- 160 -
real power rating. Hence there will be times when the VRFB is operating at maximum
charge or discharge rate and the wind farm is still subject to imbalance, nevertheless
overall imbalance would be significantly reduced.
Figure 6.15: Wind Farm Main Controller with Integrated Storage
6.6.2 Frequency Response
One of the key purposes of providing output power smoothing would be to comply with
the requirements for offering frequency response, as outlined in section 4.3.1. These
requirements mandate that a generator operating in FSM must regulate their output from a
fixed output level (the CCL). Discussions with National Grid have highlighted that this
level, in future, would be likely to be updated each settlement period (currently 30
minutes). Without an energy store, a wind farm in FSM would be required to spill wind in
order to hold a margin for frequency response but would only be likely to receive
balancing mechanism payments equivalent to their firm, reliable holding, else National
Grid could dispatch an alternative supplier for an economic advantage. Wind farm
operators set their acceptable prices for offering such services when they bid into the
market. If National Grid had few alternatives, as wind dominates the system, then this
would likely lead to significantly higher balancing costs as the system operator would
have to compensate the wind farm for lost Renewable Obligation Certificates (ROCs) at
times when wind power dominates supply.
By contrast to the stand alone wind farm, for a wind farm with an energy store, the output
of the combined farm could be controlled to a constant output based on the persistence

- 161 -
forecast of Equation 6.10 for a period of half an hour. The power capacity of the energy
store can then be used for providing frequency reserve and for achieving a constant output
power for a given settlement period.
Figure 6.16: Controller for Shared Frequency Response Capability between a Wind Farm and an
Energy Store
In addition to the requirement to regulate power output under FSM from a fixed output,
section 4.3.1 also showed that whilst low frequency response can only be applied up to the
available reserve held, the high frequency requirements aren’t limited in this manner. The
wind farm could effectively be required to regulate its output down to zero under a high
frequency event, as they typically have no minimum operating level equivalent to the
level at which a conventional plant would trip. Clearly a partially rated VRFB could not
absorb all the wind farm’s power and therefore the typical frequency controller of Figure
4.20 has to be modified such that if the charging power limit of the VRFB is reached
owing to a high frequency event, the output of the wind farm is regulated down instead.
This modification is shown in Figure 6.16.
Figure 6.17: Fast Frequency Response from VRFB
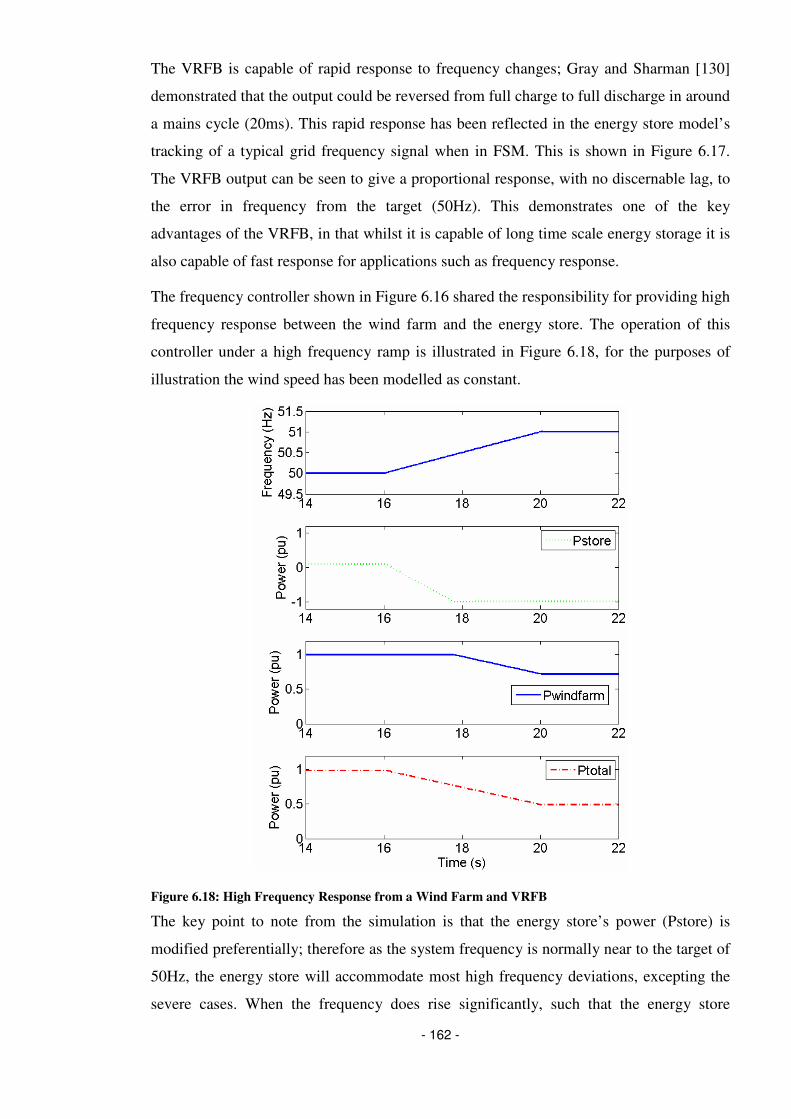
- 162 -
The VRFB is capable of rapid response to frequency changes; Gray and Sharman [130]
demonstrated that the output could be reversed from full charge to full discharge in around
a mains cycle (20ms). This rapid response has been reflected in the energy store model’s
tracking of a typical grid frequency signal when in FSM. This is shown in Figure 6.17.
The VRFB output can be seen to give a proportional response, with no discernable lag, to
the error in frequency from the target (50Hz). This demonstrates one of the key
advantages of the VRFB, in that whilst it is capable of long time scale energy storage it is
also capable of fast response for applications such as frequency response.
The frequency controller shown in Figure 6.16 shared the responsibility for providing high
frequency response between the wind farm and the energy store. The operation of this
controller under a high frequency ramp is illustrated in Figure 6.18, for the purposes of
illustration the wind speed has been modelled as constant.
Figure 6.18: High Frequency Response from a Wind Farm and VRFB
The key point to note from the simulation is that the energy store’s power (Pstore) is
modified preferentially; therefore as the system frequency is normally near to the target of
50Hz, the energy store will accommodate most high frequency deviations, excepting the
severe cases. When the frequency does rise significantly, such that the energy store

- 163 -
reaches its maximum charging rate, the wind farm’s power output (Pwindfarm) begins to
be regulated down but this action would very rarely be required. The overall response
(Ptotal) is a seamless ramp of constant gradient, which itself was defined by the
controller’s droop setting. (Note the base powers of the VRFB and wind farm are different
leading to the different gradients on their individual plots).
Incorporating an energy store for this particular application will have increasing benefit in
avoiding having to spill wind power as the proportion of wind power on the GB system
increases.
Operation of the VRFB to provide low frequency response services can take several
different forms. Figure 6.19 to Figure 6.21 illustrate the behaviour of the energy store,
providing frequency response services but without responsibility for smoothing the wind
farm’s output. In each case the energy store would add a fixed margin to the variable
output of the wind farm, thereby creating a “Delta Control” response (see section 4.3.1)
from the combined wind farm and energy store. Whilst this combined response would not
be in line with the present specifics of GB Grid Code, these three simulations are
illustrative of the way that energy storage and wind power can work in tandem to provide
frequency response services.
Figure 6.19: Generator Control for Low Frequency Response
Figure 6.19 shows the case where the energy store is holding equal high and low
frequency response margin. In this case, when the frequency is close to the target of 50Hz,

- 164 -
the energy store idles, neither charging nor discharging. Both high and low frequency
response reserves are equal to the rating of the VRFB. When the frequency falls, as it does
in this scenario, the VRFB can increase its output (Pstore), from zero, up to the maximum
rating of the battery. This increases the combined plant’s output, but that output is still
variable. Furthermore, the battery will begin to discharge, so the energy stored must be
sufficient to provide for a continuous output until the system frequency is restored or other
plant can come online (i.e. to last at least to the end of the half hour balancing period).
Figure 6.20: Load Control for Low Frequency Response
An alternative approach is shown in Figure 6.20, which could be used when an energy
store is charging. In the event that the system frequency falls, the charging rate of the
energy store could be reduced, thereby helping the system balance by reducing the total
load. A by-product of this control method is that the VRFB can offer twice its rated output
capacity as low frequency response whilst it charges. However, in order to offer high
frequency response the wind farm output would have to be put at risk of being spilt as the
VRFB cannot accommodate a reduction in power output by charging faster.
Figure 6.21 illustrates a greater frequency deviation, where the capability of the VRFB to
swing from acting as a load on the system, to generating is illustrated. Once again
however, it must be reiterated that in order to offer any high frequency response margin,
the wind farm’s output must be put at risk.

- 165 -
Figure 6.21: Bipolar Control for Low Frequency Response
The GB regulations for frequency response stipulate that the output variation must be
relative to a fixed power output level. Figure 6.22 therefore shows the behaviour of this
frequency controller when the smoothing controller of section 6.6.1 is active. As can be
seen, prior to the frequency deviation, the VRFB power (Pstore) absorbs the fluctuations
in the wind power output (Pwindfarm) allowing a constant output power to the grid
(Ptotal). When the frequency falls, the mean of the VRFB output increases so that the total
grid power increases.
This example illustrates the challenge of operating from a constant power output. Towards
the end of the scenario (t>230s), the wind falls sufficiently far that the total output power
from the wind farm and energy store combined is no longer flat. This illustrates that whilst
the initial output is flat, the reserve margin held would be variable dependent on the
prevailing wind conditions. Furthermore, as a consequence of the smoothing power, the
state of charge variation is not predictable, meaning that it must be independently
controlled to ensure that the battery does not exceed its state of charge limits.

- 166 -
Figure 6.22: Frequency Response and Power Smoothing
6.6.3 State of Charge
It has been highlighted that the state of charge of the VRFB will have to be controlled.
Yoshimoto, Nanahara and Koshimizu [142] have developed a controller for regulating the
state of charge of a VRFB installed to smooth a wind farm’s output in Japan, although
without frequency response capability. This is the largest installation of a VRFB globally
and the VRFB effectively acts such that the output of the combined system is low pass
filtered compared to the raw wind power so the VRFB absorbs fast fluctuations. However,
whilst this state of charge control is effective, it is essentially a continuous time
modification to the power output of the combined system. If this were applied here, this
would lead to a variable power output within a settlement period, which would contravene
the GB frequency response requirement to regulate from a fixed output level, and lead to
consequent imbalance.
As an alternative to continuous time management of the state of charge of the VRFB, it is
proposed to manage the state of charge by updating the power output profile (or Final
Physical Notification, FPN) for the next settlement period to be submitted. This FPN has
to be submitted an hour ahead of the relevant half hour settlement period. It is therefore
proposed to use a fuzzy logic supervisor to control the battery’s state of charge by
modifying the forecast output for the wind farm and VRFB for a given settlement period
an hour ahead. Use of fuzzy logic for controlling energy storage on a wind farm was

- 167 -
proposed in Brekken et al. [143], however, there the energy store was purely for
smoothing wind output and had no other purpose, hence the state of charge reference was
constant and the controller was continuous acting. The controller proposed for this more
complex situation is shown in Figure 6.23.
The fuzzy logic controller is designed such that it depends on both the state of charge
itself and the planned change in the state of charge reference. Hence, if the battery is
scheduled to charge or discharge for arbitrage purposes, the controller accounts for this. In
total each input variable is defined to have three states.
• The state of charge is defined as either low, near to its target value or high; where
near to target is defined by a range of ± 20% relative to the target value.
• The rate of change of the state of charge reference is defined to be discharging,
charging or holding; where holding corresponds to a planned change in SOC of
less than 5% per hour.
Figure 6.23: Integrated Fuzzy Logic Based Wind Farm and Store Controller
The membership functions of the normalized input and output variables are shown in
Figure 6.24 and the inference table, Table 6.1, shows the fuzzy rules. These nine rules are
a consequence of the two, three-state inputs. The outputs have been defuzzified according
to Mamdani’s centre of gravity approach. It should be noted that different input
combinations have different rules but potentially the same output. For example, if the state
of charge was near to its target but the planned change in that state of charge target is
negative (to discharge), then the rule states that this should lead to a slow discharge.
Likewise, if the state of charge was high, but the planned change in the state of charge was
to stay constant, then the rule also states that this should lead to a slow discharge of the
VRFB.
The controller has been designed with a view to ensuring that there is sufficient energy
capacity in the battery to absorb significant over or under-production from the wind farm.

- 168 -
Hence, if the battery becomes over-charged relative to the reference, and the reference is
set to hold energy, it will attempt to slowly discharge to ensure there is sufficient energy
margin to absorb a high wind period.
The state of charge controller is only permitted to use 80% of the power capacity of the
VRFB, thus guaranteeing some power capacity margin for frequency response. Further,
by capping the average rate of charge and discharge, the VRFB can be operated more
efficiently by minimizing Ohmic losses as can be seen from Figure 6.9.
SoC Low Near
Target High
Discharge N: Neutral SD: Slow Discharge
FD: Fast Discharge
Hold SC: Slow Charge
N: Neutral SD: Slow Discharge
Planned SoC
Change Charge FC: Fast Charge
SC: Slow Charge
N: Neutral
Table 6.1: Integrated Fuzzy Logic Controller
Figure 6.24: Degree of Membership of the Input (Top & Centre) and Output (Bottom) Functions

- 169 -
6.6.4 Arbitrage
It can be desirable to charge the VRFB at times of low prices and to sell at times of high
prices, or in essence to provide arbitrage services. The state of charge controller has
therefore been designed in order to accommodate a changing state of charge reference. As
the state of charge is based on the integral of the power output of the VRFB, power
exchange for arbitrage can be scheduled by varying the state of charge reference of the
VRFB. When charging the change in the state of charge reference should be defined as:
Equation 6.12 ( )∫ ⋅⋅⋅=∆ dtPPE
SoCechech
rated
ref argarg
1η where Erated is the rated energy
capacity of the storage system, Pcharge is the desired charging power and η(Pcharge) is an
estimate of the one way efficiency of the VRFB at the selected charging power. This
means that an a priori estimate of the efficiency profile for the VRFB is required, but this
can be obtained from the data behind Figure 6.9.
The case is similar for when the VRFB is to be scheduled to discharge, although now the
state of charge reference would be scheduled to reduce. This is illustrated in Equation
6.13. Errors in the open loop setting of the state of charge schedule are then covered by
the fuzzy logic state of charge controller.
Equation 6.13 ( )∫ ⋅⋅−⋅=∆ dtPPE
SoCedischedisch
rated
ref argarg
1η
6.6.5 Integrated Controller
The integrated control of the wind farm and energy store is illustrated in Figure 6.25 for
providing the range of control functions outlined in section 6.6.1 to section 6.6.4.
By scheduling the state of charge reference point (SoCref), the planned energy stored in the
battery can be indirectly controlled, whilst allowing power fluctuation smoothing to take
priority. A forecast is used to predict the wind farm’s output (Pforecast) during the next
balancing period to be submitted. The state of charge controller then alters the next FPN
to be submitted, in order to schedule a charge, discharge or neither (∆PSoC), to maintain
the battery’s state of charge near target. Any deviations between this modified power
production schedule (PFPN) and the actual wind farm output (PWF_Grid) are then combined
with any power demands from the frequency controller (∆Pfreq) to set the power demand
for the VRFB (PVRB_Ref). However, if the battery’s power demand exceeds the maximum
charging rate (1pu) then the wind farm reference (PWF_Ref) is modified as well.

- 170 -
Figure 6.25: Integrated Power Smoothing and Frequency Response Control including, top to bottom,
inertial response, droop response, state of charge management, forecasting and wind smoothing
Figure 6.26: Performance of Integrated Wind Farm and VRFB Controller
Figure 6.26 shows the operation of the integrated controller for the wind farm equipped
with a 25% (75MW) store rated for 6 hours output at maximum power. The plots’ x axes
are defined in terms of the settlement periods (1/2 hour periods, hence 48 per day). From

- 171 -
the top plot, it can be seen that the SoC control clearly operates well, with the SoC broadly
following the reference set for it. The SOC does not track perfectly as the battery uses
power capacity to smooth the wind farm’s output and reduce its imbalance of actual
power output to scheduled power output.
The second plot compares the output of the wind farm with a store, with that of a wind
farm alone (P). The wind farm attempts to maintain a constant output in each half-hour
balancing period, with a 1 minute ramp between periods. This is in order to additionally
provide a stable base power output for frequency response, however, extreme gusts and
lulls can still lead to some imbalance (albeit at a reduced level) as shown in the third plot
(Imbalance). This imbalance is undesirable from a power system perspective and would
be penalised by having to be covered by the wind farm operator purchasing the shortfall at
above the typical market rate or selling an excess at reduced price. Nevertheless, this
penalty does not necessitate sizing an energy store to cover any possible imbalance, as this
would lead to a store of equal capacity to the wind farm, with much of that capacity rarely
used.
The store is scheduled to charge at night (SoC ref increases), which is reflected in the
lower output from the combined wind farm and store during this period when compared to
the wind farm alone. This stored energy is then released during the morning and evening
peaks, by scheduling the SoC reference to fall.
Finally, the fourth plot down shows the maximum power reserves (Pres) available at any
given time for either high or low frequency response. During the periods when the energy
store is discharging, to take advantage of the day-night price differential, little or no low
frequency response capability is available. However, during these periods the system
typically has higher inertia due to more synchronized plant and the requirement for
frequency response reserve is lower and more marginal plant would be online.
Conversely, at night time, the margin for high frequency response capability is lower, as
the store is charging and therefore does not have margin to regulate the plant output
downwards. However, the ability of the energy store to swing from charging to
discharging means that significant low frequency response capability is held. As the
response capability is specified against a fixed output level, the volume of response
available can be seen to continuously vary as the wind speed varies.
Overall, the figure illustrates that the innovative integrated controller presented here can
be used to aggregate some of the multiple benefits of an energy store. The novel state of
charge controller can also be seen to correctly manage the battery capacity and

- 172 -
successfully time shift energy from night to day time peaks. Meanwhile the smoothing
capacity of the battery is used to meet the GB frequency response technical requirements
as the combined system holds a variable reserve for increasing or decreasing combined
output power.
6.7 Summary
This chapter revolves around the development of an integrated controller for the operation
of a VRFB in tandem with a wind farm to provide frequency response services, energy
time shifting, wind smoothing and battery state of charge management.
This chapter began (in section 6.2) by developing a simple electrochemical model of a
Vanadium Redox Flow Battery, that model has sufficient accuracy to represent output
voltage and round trip efficiency, whilst avoiding the complexity of a full representation
of the fluid dynamics of a flow battery. This flow battery must be integrated with the grid
through a boost converter and an inverter. The modelling techniques for representing these
components are drawn from earlier modelling work on wind turbines and adapted for use
with the energy store.
This modelling work led to a simple energy store model that is applicable to power
systems study whilst allowing the viability of the VRFB to be assessed. The model has
been validated against published data in section 6.4.
The energy store’s power converter control is principally drawn from a wind turbine
application but is further developed in order to enhance the response to grid faults, by a
novel feed-forward in section 6.5. This allows the energy store to ride-through grid faults
when generating or consuming power and also support the reactive power capability of the
inverter supplying the grid.
Finally, an innovative controller is developed that allows an energy store to aggregate the
benefits of operating with a wind farm, providing frequency response services and time-
shift of the renewable energy output to peak price periods. At the heart of this control is a
novel fuzzy logic controller for managing the state of charge of the VRFB. The
performance of this controller is verified with simulations using real wind speed data and
the previously validated models.

- 173 -
7 Frequency Response Economics
7.1 Introduction
The power system modelling work described in previous chapters has led to validated
models of wind turbines and Vanadium Redox Flow Battery energy storage systems. This
in turn led to the development of control methods for providing frequency response from
stand alone wind farms or wind farms equipped with flow battery energy storage. These
chapters had a particular focus on the technical capabilities of these technologies to
provide fast response to frequency changes on the power system. Nevertheless, whilst
they addressed the technical capabilities, both applications were left with key questions.
Would the cost of curtailing wind to provide reliable frequency response be too high?
Would the revenues from a flow battery energy store ever be sufficient to provide an
attractive return given their additional capital cost?
This chapter attempts to bridge this gap and to address the economic aspects of providing
frequency response from wind power and energy storage. A series of wind scenarios, as
described in section 7.2, are used by the DIgSILENT model of a 300MW wind farm with
a variety of different capacity VRFB energy stores associated. Section 7.2 also describes
how the outputs from this power system model interface with MathCAD and Excel
models and data which when combined create an economic model in order to assess the
revenues and returns provided by the store.
Whilst the electricity market structure is introduced in section 7.2, its functions and
markets, which impact on frequency response revenues, are described in greater detail in
section 7.3. This section also describes the key calculations in the MathCAD model that
provide the assessment of revenues from the wind farm and energy store. These
calculations ultimately provide the revenue inputs to a discounted cash flow analysis and
the range of appropriate discount rates is considered here.
The financial impact of adding an energy store to a wind farm’s revenues is discussed in
section 7.4, as well as the relative contribution of the different revenue streams. A novel
method of maximising the revenues from an energy store providing frequency response,
whilst putting a wind farm’s output at minimal risk is introduced. This contributes to a
discussion of the advantages and disadvantages of integrating the energy store with the
wind farm by comparing the revenues to the case of an independent energy store. These
revenue calculations lead into the net present value assessment of such energy storage
projects in section 7.5. Finally section 7.6 considers the implications of this analysis and

- 174 -
what the alternatives for frequency response provision are, whilst linking energy storage
to its potential environmental benefits.
7.2 Economic Modelling Methodology
The economic model depends on the outputs from the DIgSILENT model of a 300MW
wind farm enhanced by energy stores with a variety of different ratings. This power
system model is supplied with a series of ten different wind scenarios, each covering a
single day, the selection of these scenarios is described in more detail in section 7.2.2.
These wind inputs lead onto a persistence forecast, as described in section 6.6.1, which is
modified for battery state of charge management and such that the wind farm is scheduled
to hold a (variable) frequency response power reserve. This modified output forms the
basis for the power output forecast (FPN) which is used later in the economic model,
alongside actual output power, to assess imbalance.
The raw wind speed data drives the power system model of the wind farm and energy
store, resulting in a power output profile. This model also provides a profile of the spare
power capacity of the generator to regulate up or down power output, primarily through
modifying the energy store’s charge rate. Hence, overall the power system model passes
three main outputs to the economic model: the contracted (or forecast) power profile, the
actual output power profile and the reserve capacity for high and low frequency response.
The interconnection of this model with the economic model is shown in Figure 7.1.
The economic model draws in data from Microsoft Excel as well as the power system
model. Electricity market price data, balancing mechanism prices and frequency response
market prices have all been collated in Excel spreadsheets. Historical data has been used
to inform three different economic scenarios based on low, mid and high forecasts for the
different prices. The data sources and projections used are described in detail in sections
7.3.2 to 7.3.4.
The economic model itself draws on the outputs of these ten different wind scenarios from
the power system model, together with the three different price scenarios for power
system revenues. It independently calculates the different revenue (and cost) streams for
traded energy, imbalance, frequency response and ROCs before conducting a net present
value analysis based on three different projections for possible costs of the flow battery
installation.

- 175 -
By incorporating three different economic scenarios the uncertainty associated with the
projection is accounted for through the range of possible different economic
developments.
Figure 7.1: Economic Modelling Methodology
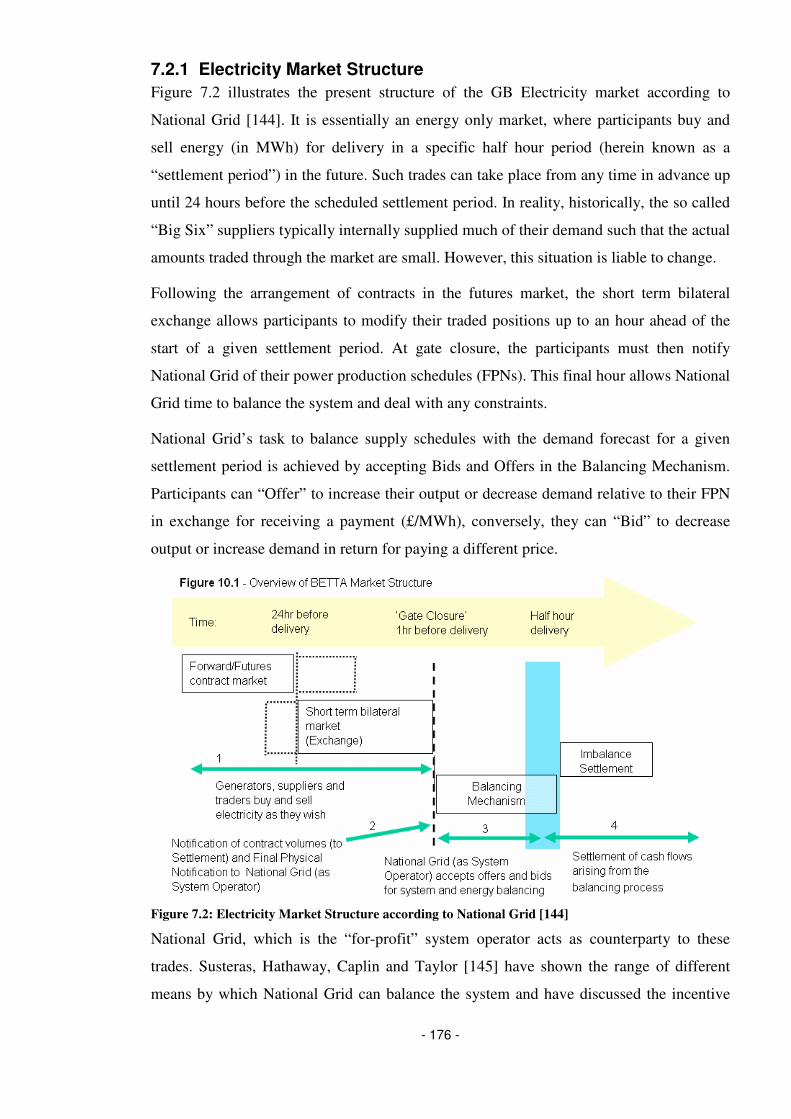
- 176 -
7.2.1 Electricity Market Structure
Figure 7.2 illustrates the present structure of the GB Electricity market according to
National Grid [144]. It is essentially an energy only market, where participants buy and
sell energy (in MWh) for delivery in a specific half hour period (herein known as a
“settlement period”) in the future. Such trades can take place from any time in advance up
until 24 hours before the scheduled settlement period. In reality, historically, the so called
“Big Six” suppliers typically internally supplied much of their demand such that the actual
amounts traded through the market are small. However, this situation is liable to change.
Following the arrangement of contracts in the futures market, the short term bilateral
exchange allows participants to modify their traded positions up to an hour ahead of the
start of a given settlement period. At gate closure, the participants must then notify
National Grid of their power production schedules (FPNs). This final hour allows National
Grid time to balance the system and deal with any constraints.
National Grid’s task to balance supply schedules with the demand forecast for a given
settlement period is achieved by accepting Bids and Offers in the Balancing Mechanism.
Participants can “Offer” to increase their output or decrease demand relative to their FPN
in exchange for receiving a payment (£/MWh), conversely, they can “Bid” to decrease
output or increase demand in return for paying a different price.
Figure 7.2: Electricity Market Structure according to National Grid [144]
National Grid, which is the “for-profit” system operator acts as counterparty to these
trades. Susteras, Hathaway, Caplin and Taylor [145] have shown the range of different
means by which National Grid can balance the system and have discussed the incentive

- 177 -
scheme by which National Grid retains a share of profit made through being incentivised
to optimise the balancing services, or can be punished for any losses. Whilst there are
other options than the Balancing Mechanism available to National Grid, they highlight
that these represent only a minority of operations in comparison to the bids and offers.
This balancing mechanism should ensure that at the start of a given settlement period the
supply schedule meets the forecast demand level. As well as ensuring the match between
forecast supply and demand, the balancing mechanism is also used to ensure that there is
sufficient headroom and footroom on frequency responsive plant to meet the requirements
of Figure 2.23.
During each settlement period, active frequency responsive plant ensures the continuous
match between actual supply and demand outturns. Any significant forecast errors or
supply shortfalls are then met over longer time-scales through use of Short Term
Operational Reserves (STOR) and fast starting units. Following the conclusion of a
settlement period the system operator then retrospectively settles the imbalance payments.
7.2.2 Scenario Analysis
A scenario based approach has been used to assess the economic benefit of adding a
VRFB to a wind farm. Under this approach it is necessary to ensure that the scenarios
tested cover the true range of expected operating conditions. The wind data, which in turn
sets the power output from the power system model, has been extracted from several
months of measured data from Horns Rev offshore wind farm. Analysing the complete
data set would have required excessive simulation time from the power system model;
therefore a subset has been used. However, the subset is reflective of the underlying data
set, particularly for the following parameters:
• Overall Capacity Factor: appropriate selection of data led to an equivalent
estimation of the wind farm’s energy yield.
• Power Output Fluctuation: the scenarios analysed reasonably represent the
variability of the power output that the full wind farm produced.
The capacity factor is relatively straightforward to compare by finding the average output
of the complete dataset and comparing it to the average output of the scenarios chosen.
This comparison shows a capacity factor of 0.43 for the complete dataset, versus a
capacity factor of 0.42 for the sub set, which is well within the bounds of variability in
capacity factor found between different wind farms. This high capacity factor is indicative
of an excellent offshore wind resource.

- 178 -
The subset consists of data from ten periods of one day selected from the complete
dataset. Using a smaller subset inherently means that the histogram of power fluctuations
is not as consistent for the scenarios subset as for the full dataset. However, Figure 7.3
shows the comparative histograms of five minute power ramping incidents for the full
data set and the subset, with the subset appropriately scaled to reflect its lower number of
data points. These histograms are broadly comparable, with the extremes of ramping
reflected reasonably well (i.e. the worst case scenarios will be represented in the analysis).
However, it should be noted that these scenarios have a slightly higher representation of
rapid reduction in output power compared to the original dataset, and a lower
representation of extremely fast increases in power output. Nevertheless, overall the
scenarios selected are reasonably reflective of the range of operation that an offshore wind
farm and energy storage system would encounter.
1
10
100
1000
10000
100000
X<-95% -75%<X<-65%
-45%<X<-35%
-15%<X<-5%
15%<X<25% 45%<X<55% 75%<X<85%
Fre
qu
en
cy
Full data set
Scenarios
Figure 7.3: Horns Rev Wind Speed Data Subset Comparison, histogram of forecast errors for an hour
ahead FPN (the x axis shows the % error in forecast to actual output as a percentage of total wind
farm rating)
The different wind scenarios used are shown in Figure 7.4, and illustrate that there are
prolonged periods with both high and low wind speeds as well as a range of scenarios
with high levels of turbulence reflected in the output power profiles (for example days 3
and 5). Additionally, some start the 24 hour period at very low output and ramp up
considerably (day 2), whilst others do the opposite (day 1 and day 6), thereby challenging
the output scheduling.

- 179 -
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 5 10 15 20
Time of Day (hr)
Rela
tive P
ow
er
Outp
ut (p
u) Day 1
Day 2
Day 3
Day 4
Day 5
Day 6
Day 7
Day 8
Day 9
Day 10
Figure 7.4: Wind Speed Scenarios
7.2.3 Energy Store Capacity
Bludszuweit and Dominguez-Navarro [146] suggest that sizing an energy store to cover
wind farm forecast errors can be done probabilistically. Essentially they propose
calculating the required energy capacity by integrating the error between historic forecasts
and actual power output, whilst allowing a certain proportion of “unserved energy”.
However, this methodology is only applicable to compensating for forecast errors.
Korpaas, Holen and Hildrum [147] consider instead a mixed probabilistic approach
combined with scenarios to test the sizing of the store, additionally they incorporate the
effects of a varying electricity market spot price on the storage operation. However, their
work does not consider diurnal pricing leading to arbitrage opportunities and considers
short term power regulation, such as for frequency response, as a cost. These differences
are primarily due to its focus on the Nordpool market, which has significant hydroelectric
resources and a different market structure.
Brekken et al. [143] have proposed sizing a Zinc-Bromine flow battery energy store using
a scenario approach. In their work they consider power and energy ratings at 0.1pu steps
relative to the wind farm rating, before increasing the resolution of their study to find the
optimal solution. Their work was focussed purely on avoiding imbalance penalties in the
Bonneville Power Authorities’ region of western U.S.A. and whilst the optimal sizes
depend on different economics the general approach of using different energy store sizes
is useful.
In order to assess the different possible sizes of energy store, six different power ratings
have been selected and for each different power rating, four different discharge times have

- 180 -
been simulated. The power ratings have been selected as a varying proportion of the wind
farm’s output power. The smallest rating considered is 10% of the wind farm’s output,
which is the minimum size to meet the frequency response requirement of GB Grid Code.
The largest size considered is 33% of the wind farm’s power, which equates to the largest
conceivable size of the wind farm’s IGBT SVC and therefore the point at which the power
electronic interface cost would start to significantly increase. 33% corresponds to the Grid
Code mandated reactive power capacity to achieve a ±0.95 power factor at the grid
connection point.
The four energy ratings have been defined according to a number of hours discharge at
full power output. This means the energy rating for the 1 hour discharge case with a 20%
store is twice that of the 10% case. The relative energy ratings of the store can be seen in
Table 7.1.
Discharge Time at Full Power
No Store 1 hour 3 hours 6 hours 10 hours No Store 0 N/A
10% 0.1 0.3 0.6 1 15% 0.15 0.45 0.9 1.5 20% 0.2 0.6 1.2 2 25% 0.25 0.75 1.5 2.5 30% 0.3 0.9 1.8 3
Store Power Rating
33%
N/A
0.33 1 2 3.3
Table 7.1: Energy Store Power and Energy Ratings
The wind farm itself is considered to be 300MW (to be of similar size to UK round 2
offshore projects). Hence, energy store power ratings vary from 30MW to 100MW. The
size of the wind farm and consequently the energy stores are reflective of the fact that
providers of frequency response in the UK must offer a minimum of 10MW response to
access the market. It is anticipated, however, that any demonstrations or prototype projects
would have to be significantly smaller.
7.2.4 Discounted Cash Flow Analysis
As the primary cost of an energy storage facility would be the initial capital cost of the
technology, whilst the revenue would accrue over time, it is appropriate to consider the
economic case on the basis of a Discounted Cash Flow (DCF) analysis. This allows the
future revenues to be converted to a Net Present Value (NPV) using an interest rate to
accommodate money’s time value and to a lesser extent, risk. The NPV of a future year’s
revenue (πn) is given in Equation 7.1, where i is the percentage interest rate applied and n
is the number is years into the future.

- 181 -
Equation 7.1 n
n
NPVi
ππ ⋅
+=
)100(
100
Where the scenario analysis implicitly assumes that the future revenues will be equal in
any given year, the total revenue over a period of N years can be calculated from the sum
of a geometric series according to Equation 7.2.
Equation 7.2
+−
+−⋅
==Π ∑=
)100(
1001
)100(
10011
1
i
i
n
N
n
NPVNPV
π
π
As the expected life of a VRFB is around 20 years, with a membrane replacement after 10
years, this is the time frame used for the DCF. The interest rate used strongly influences
the outcome of a DCF analysis and this rate in turn may depend on several factors
according to Aston [148]:
• The prevailing bank interest rate.
• The return an equivalent investment could make.
• Returns to shareholders.
• A premium for a project’s risk.
The interest rates applied, along with the costs of operating a VRFB are discussed further
in section 7.3.
7.2.5 Market Reform
The widespread deployment of wind power on the GB power system could have a
significant impact on the electricity market. James Cox [149] of Pöyry Consulting has
highlighted the significant price volatility that could be seen during periods of high and
low wind. Periods of low wind and high demand could lead to particular stress on the
system, leading to a particular concern for DECC over the market’s structure. As the
electricity market currently operates as an energy only market, there is a perceived risk
that it is not sufficiently flexible to provide a return on investments in peaking capacity
which may be used only rarely to cover low wind, high demand periods.
Owing to the concerns that the GB electricity market will not deliver security of supply,
DECC [150] have been consulting on modifying the existing market through the addition
of a capacity mechanism. This would act as an additional revenue stream for providers of
firm capacity, such as energy storage. Hence, whilst this work attempts to estimate the

- 182 -
revenue that an energy store could earn under today’s market arrangements, it should be
recognised that due to proposed reforms these estimates are subject to some uncertainty.
7.3 Economic Data
7.3.1 Renewable Obligation Certificates
The UK wind industry is currently supported through the Renewables Obligation
Certificate (ROCs) scheme, where a power supplier must source a rising share of
electricity from renewable sources. Wind farms are issued with these certificates for each
MWh of energy produced. These certificates can then be traded in a market and the
typical revenue, per MWh generated, is often higher for this revenue source than for a
wind farm’s traded energy.
Equation 7.3 _____
0
ROC
Tt
t
gridROCdtP π⋅
⋅=Π ∫
=
=
Where ΠROC is the total revenue and _____
ROCπ is a
long term average price for ROCs, both in £/MWh.
The challenge when assessing the revenue ROCs generate is not in the mathematical
assessment, which is shown in Equation 7.3, but in understanding the regulations as to
what is and what is not eligible for ROCs, and therefore the impact an energy store would
have.
For an offshore wind farm, the ROCs are metered offshore and the energy store would be
likely to be located onshore, hence any energy transferred to and from the store is
independent of the ROCs regime. This has benefits as it is simple and the round trip losses
of the energy store do not lead to ROC losses. This is inline with the present definitions of
ROCs which are only available for specific, named, technologies, and this list excludes
storage.
The onshore case is less clear as the ROCs could be metered either side of the energy
store’s connection. When the energy store is included, this means that any round trip
energy losses would lead to lost ROCs and therefore have a negative impact on the wind
farm’s overall revenue. Owing to the lack of clarity around what is and isn’t eligible for
ROCs, whilst they are included in the economic assessment, two different cases are
assessed: including ROCs at 1ROC/MWh and excluding them.
7.3.2 Energy Price and System Price Data
In order to assess the revenue from the energy yield of the wind farm, a simplifying
assumption has been made, that the energy is traded at the average of the system buy and

- 183 -
system sell price. This is the same underlying assumption used by Collins, Parkes and
Tindal [151] in assessing the value of advanced forecasting techniques for British power
markets. This assumption implicitly assumes that the economic penalty for over or under-
estimation of the wind power forecast is equal and that the system prices are reflective of
the actual market price paid in the forward/futures market (see Figure 7.2). If this
assumption is not made, the high probability of wind power missing its production
schedules, relative to that of a dispatchable fossil fired plant, means bidding strategies
would become important for maximising revenues thereby significantly complicating
matters.
These system buy and sell prices for every settlement period can be downloaded from the
Elexon reporting website (www.bmreports.com). One year’s data from March 2010 to
February 2011 has been collated and has been approved for use here by Elexon.
Figure 7.5 shows the annual price averages and variation across the settlement periods,
with settlement period 1 corresponding to 00:00 to 00:30 each day. This price profile
clearly illustrates the impact of energy use on the price. During the night hours energy use
is low, leading to lower system price, however, as the day begins energy use and the
corresponding price ramps up. The price stays high during the morning work hours before
declining in the afternoon. The biggest peak of the day is seen during the evening peak, as
domestic demand for heat, light and appliances leads to high demand. Following this
peak, demand gradually declines.
Average System Price: March 2010 - February 2011
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
0 5 10 15 20 25 30 35 40 45
Settlement Period
£/M
Wh
Yearly Average System Prices (£/MWh) (LowCase) System Sell Price
Yearly Average System Prices (£/MWh) (LowCase) System Buy Price
Yearly Average System Prices (£/MWh) (LowCase) System Average Price
Figure 7.5: Average System Buy and Sell Prices for March 2010 to February 2011

- 184 -
The revenue from traded energy is derived by assuming that the forecast will be perfect
and therefore the entire forecast energy yield is sold. The price is derived as the average of
the system buy and sell prices and revenue is calculated as shown in Equation 7.4.
Equation 7.4 ∑ ∫=
=
+⋅
⋅=Π
48
1
__________min30
02SP
SPSSPSPSBP
t
cclsalesdtP
ππ Where Pccl is the power
production schedule (MW), _____
SPSBPπ is the long term average system buy price for the
settlement period SP and _____
SPSSPπ is likewise the long term average system sell price for a
particular settlement period.
The error in the power production forecast is accounted for by the separate imbalance
calculation(see next section). Furthermore, the scheduling of the battery state of charge
inherently takes account of day-night arbitrage, as Pccl will be modified to be higher
during the periods with higher prices.
OFGEM [152] have presented an analysis of projected development in electricity costs up
to 2025, called “Project Discovery”. According to their analysis electricity prices are
likely to rise by approximately 14% under a central projection or 24% under a worst case.
Today’s system prices form the basis of the “Low” case for the economic forecast, with
these rates of increase being used to adapt the system price profile to give “Mid” and
“High” priced alternative scenarios for comparison.
7.3.3 Imbalance
The costs associated with deviating from a contracted FPN during a settlement period fall
on a wind farm through the System Buy Price (SBP) and System Sell Price (SSP). If the
wind farm is short of its projected output then it must pay for the energy shortfall at the
(usually higher) SBP. If the wind farm overproduces relative to the forecast then it will
only receive the lower SSP. Bathurst and Strbac [153] have shown how using an energy
store to avoid these costs and maximise revenue can lead to added value for a wind farm,
however, their analysis focuses on revenues and not costs nor the likelihood that a system
would pay back.
The revenue associated with the imbalance payments is calculated according to Equation
7.5 for periods where the wind farm’s output is above the contracted level and Equation
7.6 when it is below.

- 185 -
Equation 7.5 ( )∑ ∫=
=
⋅
⋅−=Π
48
1
_____min30
0SP
SSPSP
t
cclgridSSPdtPP π
Equation 7.6 ( )∑ ∫=
=
⋅
⋅−=Π
48
1
_____min30
0SP
SBPSP
t
cclgridSBPdtPP π
The total revenue/cost associated with the imbalance of the wind farm is therefore the sum
of these two components as in Equation 7.7.
Equation 7.7 SBPSSPbalance
Π+Π=Π Im
7.3.4 Frequency Response Market
7.3.4.1 Balancing Mechanism Payments
As indicated in section 7.2.1, the balancing mechanism is used by National Grid to avoid
constraints and match the planned balance between scheduled supply and forecast demand
on the power system. It may also be used to adjust the FPN of plant to create “headroom”
for low frequency response or “footroom” for high frequency response. Hence, even with
a system where supply and demand are scheduled to balance during a settlement period,
National Grid may end up accepting bids on some plant and equal offers on others in
order to ensure that their frequency response margins (see Figure 2.23) are met.
The offer price relates to an increase in generation and therefore needs to cover additional
fuel use plus profit; hence, the offer price is typically loosely tied to the cost of marginal
plant on the system. Bids relate to a reduction in power output and therefore ought to lead
to fuel savings. However, the bids will be made at a level less than the contracted price
that the supplier has received, such that they typically recover their profit, whilst
accounting for fuel savings. Hence, whilst offers are only ever positive values, a bid may
be negative, implying that a generator requires a net payment to reduce its output. Overall
the balancing mechanism prices, which are updated for each settlement period an hour
ahead of delivery, add a cost to the provision of frequency response that is reflective of the
short term market conditions.
The cost of the balancing mechanism payments made to change the output on frequency
responsive plant are available through National Grid’s [154] market information data on
commercial (or “Firm”) frequency response. This data has been collated over a twelve
month period (March 2010 to February 2011) and averaged to find the incremental cost of
frequency response attributable to the balancing mechanism. This can be seen in Table
7.2.

- 186 -
Incorporating the bid and offer data into the calculation of energy store revenue,
introduces an element of value, rather than revenue. Currently an energy store, would not
require a deload to provide frequency response services and therefore would only directly
access the holding payments. However, it is assumed that it could tender higher holding
payment prices and still be selected in the market as that would lead to an overall
optimisation of the response holding.
7.3.4.2 Holding Payments
The balancing mechanism reflects near real time frequency response pricing, but only
covers plant which require an FPN change in order to create headroom or footroom. In
addition to the revenue from the balancing mechanism, there is a separate market for
frequency response which operates monthly covering all relevant plant. Participants in this
market indicate the price (£/MWh, where a MWh here is a measure of potential to deliver
energy, not actual energy delivered) that they require in order to hold margin for primary,
secondary or high frequency response. National Grid [155] publishes details of the
monthly prices paid for plant to hold frequency response.
0
2
4
6
8
10
12
0 5 10 15 20 25 30 35 40
Month
£/M
Wh
Average PrimaryHolding Price(£/MWh)
AverageSecondaryHolding Price(£/MWh)Average HighHolding Price(£/MWh)
Figure 7.6: Mandatory Frequency Response Market Price Evolution over a 3 year period March
2008-February 2011)
As the development of the frequency response market is a result of the relatively recent
deregulation of the electricity industry, prices are still evolving. Figure 7.6 attempts to
illustrate the trend in these prices over time. This shows a strong negative trend for high
frequency response, until, towards the end of the period for which data was available,
prices stabilised and perhaps even slightly increased. The development in price for
primary and secondary response is less dramatic, with prices little changed over the
period.

- 187 -
1.5
2.5
3.5
4.5
5.5
6.5
7.5
8.5
9.5
10.5
11.5
150 250 350 450 550 650 750
Total Reserve Holding (GWh)
Ave
rag
e P
ric
e P
aid
(£
/MW
h)
Primary
Secondary
High
Figure 7.7: Mandatory Frequency Response Market Price to Holding Volume Relationship
Figure 7.7 shows that the prices paid for response have not just developed over time, there
is a correlation between the holdings that National Grid purchase for a given month and
the price paid on average. This is particularly relevant because the projected increase in
requirement for primary and secondary response (Figure 2.23) would therefore suggest a
developing trend towards higher prices.
7.3.4.3 Response Payments
Provision of response, whether reduction in power output in response to a high grid
frequency, or increase in power output following a frequency fall would lead to a change
in the fuel usage of a conventional fossil fuel fired power station. As a result, frequency
responsive plant is compensated, retrospectively, according to its response energy to
frequency deviations. However, these response payments are typically small in
comparison to the payments previously discussed and typically average out to nearly zero.
Hence, the contribution of response payments to the economic case has been ignored with
National Grid’s confirmation that this is a reasonable simplification.
Balancing Mechanism (£/MWh)
Frequency Response Holding Prices (£/MWh) Scenario
System Prices
Bids Offers
ROCs (£/MWh)
Primary Secondary High Low As today 5.4 2.2 45 3.0 2.0 7.0 Mid +14% 6.2 2.5 50 4.0 2.5 7.0 High +24% 6.7 2.7 55 4.5 3.0 7.5
Table 7.2: Economic Scenarios
Table 7.2 illustrates the three different scenarios that have been considered for the
economic analysis of the energy store. The “Low” case takes prices that are approximately

- 188 -
the same as today, whilst developments in the energy market and frequency response
market are modelled separately in the three scenarios owing to differing impacts of wind’s
deployment.
Equation 7.8 to Equation 7.10 show how the revenues from frequency response are
calculated based on the margins held and the different pricing mechanisms.
Equation 7.8 ( ) ( )OfferhighHold
t
selcclHighdtPP ππ +⋅
⋅−=Π ∫
=
_
min30
0
Where Psel is the minimum
possible combined output (MW), which may be negative; πHold_high is the payment for
holding power available to withdraw MWh of energy as needed (£/MWh); πOffer is the
system wide average offer payment required to create the footroom for high response
(£/MWh).
Equation 7.9 ( ) ( )BidHoldprimHold
t
cclmelLowdtPP πππ ++⋅
⋅−=Π ∫
=
sec__
min30
0
πHold_prim and πHold_sec
are the payments for holding power available to deliver MWh of energy as needed
(£/MWh) within primary and secondary timescales; πBid is the system wide average bid
payment required to create the headroom for low response (£/MWh).
Equation 7.10 LowHighFR
Π+Π=Π
7.3.5 Arbitrage Scheduling
Figure 7.5 illustrates that there is a significant potential revenue opportunity from buying
energy at the low night time prices and selling it into the day time peak periods. Figure 7.8
represents a simplified analysis of the absolute maximum revenue that could be derived
from arbitrage, capacity firming and frequency response combined under today’s prices.
The frequency response payments have been derived from the residual power margin held
for either low or high frequency response after the arbitrage charging or discharging takes
priority. The arbitrage revenues been generated by ordering the settlement periods by
average system price and assuming if only 1 hour is allocated to arbitrage that buying
would take place (at the SSP) in the lowest priced settlement period and selling in the
highest (at the SBP). The use of the system buy and sell prices implicitly incorporates the
maximum benefit from capacity firming.
For an energy store with 6 hours capacity, buying would take place in the 12 lowest priced
settlement periods and selling in the 12 highest. Where the efficiency is less than 100%,
the number of settlement periods that the energy store can sell into profitably is reduced.

- 189 -
This places a rough upper limit on the amount that can be earned from different energy
store ratings through arbitrage. Also on the plot is again a rough estimate for the combined
value of frequency response without arbitrage, illustrating that in the 60-75% round trip
efficiency band, as this plot shows the maximum combined revenue, arbitrage may only
add incrementally to the frequency response revenues.
Dependent on the energy storage capacity of the VRFB under consideration, the arbitrage
scheduler uses this plot, in conjunction with the ordered settlement period prices to
generate a schedule as to whether to use capacity for buying selling or holding energy.
This introduces some imperfection into the controller as Figure 7.8 is based on
approximate values and relies on long term average system prices, but this is reflective to
some extent of real world operation.
10.00
15.00
20.00
25.00
30.00
35.00
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
Time (Hours)
Reven
ue (
£/M
W i
ns
talle
d/h
ou
r)
10.00
15.00
20.00
25.00
30.00
35.00
η = 100%
η = 90%
η = 80%
η = 70%
η = 60%
FR
Figure 7.8: Comparison of Arbitrage and Frequency Response Revenues, the first hour represents
charging in the cheapest half-hour period and discharging into the single peak half hour period, with
longer charge/discharge periods shown moving right on the x axis
Figure 7.8 includes many assumptions and was generated to assess whether the aggregated
benefits of different revenue streams from the energy store could produce meaningful
revenue. It provides an upper bound on the possible revenue from arbitrage as the full
differential between the minimum system sell price and the maximum system buy price is
unlikely to be realised. Overall, it indicates that aggregating benefits in this manner is
likely to provide some improvement over a single purpose energy store, even with limited
round trip efficiency. The scenario analysis provides a more accurate assessment of the
potential aggregated revenues.

- 190 -
7.3.6 VRFB Costs
The principle costs associated with the VRFB are the capital costs, both the energy cost
($/kWh) and the power capacity cost ($/kW). Figure 5.1 provided the indicative range of
costs of power capacity according to current literature, whilst Figure 5.2 provided the
indicative range of current energy capacity costs, again based on the available literature.
Lewis and Sharman [156] have presented on the costs of VRFBs highlighting their
benefits for longer term energy storage. Their analysis of Prudent Energy and GE
Energy’s system estimated the power cost at around $1700/kW and the energy cost at
$300/kWh. These form the central estimate for costs as outlined in Table 7.3, with the
higher and lower estimates based around this central projection.
Kear, Shah and Walsh [157] have conducted an extensive analysis of VRFBs considering
commercialisation and current costs. Their analysis estimates that a typical VRFB
installation would require a membrane refurbishment after 10 years operation and that this
cost would be in the order of 15% of the initial capital cost.
Scenario Power Cost ($/kW) Energy Cost ($/kWh)
Low 1200 200
Mid 1700 300
High 2200 400
Table 7.3: Cost Scenarios for the VRFB
Kear, Shah and Walsh [157] include a significantly higher estimate of operations and
maintenance costs than Bindner [137], whose installation has required no maintenance
over several years operation. Here an operations and maintenance cost of the VRFB is
assumed to be around 0.5% of the capital cost per year.
7.3.7 Discount Rate and Sensitivity Analysis
Under a DCF analysis, the discount rate used significantly affects the results of the study.
Oak Ridge [158] have conducted a study on deploying used batteries in power systems,
under their central case a discount rate of 4% has been used. This is low compared to a
typical discount rate but reflects current low interest rates and a relatively low risk project.
As the analysis here includes scenarios covering low, mid and high end estimates of
revenues, it is reasonable that the discount rate should not include a significant risk
component, as this is reflected in the different scenarios; instead basing it on alternative
returns is reasonable. However, this is still based on an American project and should be
compared to the discount rates appropriate for renewable energy generation projects in

- 191 -
general in the UK. Oxera [159] have conducted an extensive survey of discount rates that
are applicable to low carbon power generation projects. Furthermore, they estimate that
appropriate policy support could lead to discount rates that are 2-3% lower by 2020 for
supported technologies. Figure 7.9 illustrates the range of discount rates that are typical
today and are expected to be typical in 2020 with appropriate government support.
In view of these typical rates, and recognising that the risk weighting is largely reflected
in the different scenarios addressed, 4% can be seen as a reasonable low end estimate for
use in the analysis, where the realistic time frame for deployment of large scale energy
storage is closer to 2020. However, a sensitivity analysis is included where rates of 8%
and 12% have been used to stress test the results under significantly higher rates of
interest.
0 2 4 6 8 10 12 14 16 18 20
CCGTHydro ROR
Solar PVDedicated Biogas (AD)
Onshore WindBiomass
Nuclear (New build)Offshore WindWave (Fixed)Tidal Stream
Tidal BarrageCCS, coalCCS, gas
Wave (Floating)CCGT
Hydro RORSolar PV
Dedicated Biogas (AD)Onshore Wind
BiomassNuclear (New build)
Offshore WindWave (Fixed)Tidal Stream
Tidal BarrageCCS, coalCCS, gas
Wave (Floating)
To
da
y20
20
Tech
no
log
y
Discount Rate (%) Figure 7.9: Oxera, 2011 discount rates today and 2020 for typical low carbon sources
7.4 Energy Storage Revenues
This section considers the benefits that an energy store can bring to a wind farm purely in
terms of its impact on revenues. It begins by considering the case where the energy store
is integrated with the wind farm and therefore responsible for smoothing the wind power
in order to meet the requirement to provide frequency response from a stable output level.
It then moves on to considering the case where the energy store is entirely independent of
the wind farm before introducing an optimal arrangement.

- 192 -
7.4.1 Integrated Energy Store Revenues
The annual (undiscounted) revenues from the wind farm with an energy store can be
compared to the case without a store. This allows an assessment of the incremental
revenue that the energy store provides over and above that of the wind farm alone. The
resulting incremental annual revenues for the three economic scenarios are plotted in
Figure 7.11 through Figure 7.13. The finite number of scenarios considered in the analysis
means that the results for each different store size do not provide totally smooth plots,
which would be possible only with a very large scenario pool. The intermittency and
variability of the wind, combined with different arbitrage capabilities of each of the
different energy ratings, mean that the power profile of the energy store varies
significantly between the various store sizes, even under the same wind profile.
40
45
50
55
60
65
Low Mid High
Economic Scenario
Annual W
ind F
arm
Energ
y S
ale
s (
exc. R
OC
s)
(Mill
ion £
)
0%
10%
15%
20%
25%
30%
33%
Figure 7.10: Traded Energy Revenues, excluding frequency response, for the different power
capacities considered
As the efficiency of the VRFB varies depending on the power input/output; this leads to
significantly different energy losses between the different scenarios. These energy losses
lead to lost sales and may lead to lost ROCs, which can only be compensated for by
selling the remaining energy at a higher price. However, as Figure 7.10 illustrates, the
time shifting of energy to higher prices and the increased certainty of delivery are
insufficient economic levers in any of these scenarios to compensate for the lost energy in
the energy store. This is because the VRFB’s round trip efficiency of around 65% (an
approximate average) is insufficient, at today’s typical power price variation and
imbalance penalties, to operate purely for arbitrage and power smoothing. Frequency
response revenues become the critical revenue stream. However, the capacity of the

- 193 -
energy store to provide frequency response is limited because much of the power capacity
is required to provide wind smoothing, which in turn leads to a loss owing to the round
trip losses.
It can be seen from Figure 7.11 through Figure 7.13 that the ROCs have a significant
impact on the outcome of the analysis. If the energy store were located ‘behind the meter’
then any round trip energy losses would also lead to lost ROCs and therefore lost
revenues. However, if the energy store is independent, such as for an onshore energy store
with an offshore wind farm, the ROCs would still be allocated to the wind farm and the
only loss is due to the lower traded energy sales.
Overall, the addition of an energy store can be seen to normally increase the revenue from
a large wind farm even under the low case. However, these results suggest that the greater
the power capacity of the energy store the better the revenues, owing to the increased
proportion of the power capacity available for frequency response and arbitrage over
power smoothing. This suggests that an independent energy store may be preferable as all
its power capacity could be used for the higher value applications of arbitrage and
frequency response.
-6.00%
-4.00%
-2.00%
0.00%
2.00%
4.00%
6.00%
8.00%
10.00%
12.00%
14.00%
1 3 6 10 1 3 6 10 1 3 6 10 1 3 6 10 1 3 6 10 1 3 6 10
10.00% 15.00% 20.00% 25.00% 30.00% 33.00%
Power and Energy Ratings (% and hr)
% R
evenue Incre
ase
Including Lost ROCs
Excluding Lost ROCs
Figure 7.11: Low Case - Incremental Revenue

- 194 -
-4.00%
-2.00%
0.00%
2.00%
4.00%
6.00%
8.00%
10.00%
12.00%
14.00%
16.00%
1 3 6 10 1 3 6 10 1 3 6 10 1 3 6 10 1 3 6 10 1 3 6 10
10.00% 15.00% 20.00% 25.00% 30.00% 33.00%
Power and Energy Ratings (% and hr)
% R
evenue
Incre
ase
Including Lost ROCs
Excluding Lost ROCs
Figure 7.12: Mid Case - Incremental Revenue
-4.00%
-2.00%
0.00%
2.00%
4.00%
6.00%
8.00%
10.00%
12.00%
14.00%
16.00%
18.00%
1 3 6 10 1 3 6 10 1 3 6 10 1 3 6 10 1 3 6 10 1 3 6 10
10.00% 15.00% 20.00% 25.00% 30.00% 33.00%
Power and Energy Ratings (% and hr)
% R
even
ue Incre
ase
Including Lost ROCs
Excluding Lost ROCs
Figure 7.13: High Case - Incremental Revenues

- 195 -
0
2
4
6
8
10
12
14
16
18
20
1 3 6 10 1 3 6 10 1 3 6 10 1 3 6 10 1 3 6 10 1 3 6 10
30 45 60 75 90 100
Power Rating (MW) and Energy Rating (hrs)
Incre
menta
l R
eve
nue (
£m
illio
n/y
r)
Low Case
Mid Case
High Case
Figure 7.14: Incremental Revenues (Excluding ROCs) in £ for different power and energy rating
batteries
As a very simple comparison, the results above suggest that the addition of an energy
store would ultimately lead to an increase in annual revenue of at a minimum £1.7million
for a 30MW store. Likewise a £17.6million increase for a 100MW store is possible. This
is equivalent to a yield of around £57/kW/yr to £176/kW/yr. As Figure 7.10 shows that the
energy trading actually leads to a net loss, this incremental revenue is entirely ascribable
to the value derived from frequency response.
It is possible to provide a quick validation that the results here are of the right order by
considering the comparison to the published value of frequency response from electric
vehicles derived by Ricardo and National Grid [160]. The annual value of an electric
vehicle for providing frequency response, which is assumed to be not available during
peak periods, is estimated to be £600 for a 3kW system to £8000 for a 50kW system. This
equates to £160/kW/yr to £200/kW/yr, and this is for a system that is assumed to be
unavailable during rush hour, which is typically close to peak power demand periods.
Conversely, Short [161] looked into the economic value of providing frequency response
from dynamic demand in 2004 and concluded a 50W system would provide a benefit of
around £3 per year, which equates to £60/kW/yr.
This shows that the results of this study are inline with the dynamic demand case and are
also of a similar order to those from electric vehicles. In fact the estimates are perhaps on
the low side, which is in part due to conservative projections and in part owed to the

- 196 -
specifics of operating with a wind farm which will be covered further in subsequent
sections.
7.4.2 Independent Energy Store Revenues
The previous section has demonstrated the difficulty of incorporating a VRFB energy
store with a wind farm, owing to the low revenue that is earned for providing a
predictable, flat output, which is a pre-requisite for providing frequency response.
Therefore, this section assesses whether it would be viable to use a VRFB in isolation
purely for the purpose of providing frequency response. Using an energy store in isolation
has the advantage that it can offer its full power capacity for frequency response without
having to smooth the wind. Conversely, it has the disadvantage that it cannot be used in
conjunction with the wind farm’s high frequency response capability to offer greater
combined response.
The revenue from an independent energy store is much more readily calculated than that
from a store integrated with a wind farm, as its output is not compensating for wind’s
variability. Payments are dependent only on the average frequency response payments and
the cost of power to supply the ancillaries of the VRFB.
0
2
4
6
8
10
12
14
16
30 45 60 75 90 100
Store Rating (MW)
Incre
menta
l A
nn
ual R
evenu
e (
Mill
ion
£) Store Only
Store & Wind
Figure 7.15: Comparison of revenues from an independent energy store and a store operating with a
wind farm (under the “Mid” scenario)
Figure 7.15 shows the comparative revenues of a VRFB operating in tandem and
independently from a wind farm, the comparison uses the “Mid” scenario, with 3 hours
capacity. It is clear from this plot that at low size relative to the wind farm, the store is
better off as an independent entity, as the power required for smoothing the wind output

- 197 -
reduces the capacity available for frequency response. However, as the wind farm’s store
becomes relatively larger, the revenues approach those of the independent store; the cost
of smoothing the wind is compensated for by the increased frequency response payments
and the ability to use the wind farm’s capacity to offer greater high frequency response
capacity.
This shows that under some circumstances there is an economic advantage to being able
to combine wind power’s high frequency response capability with the energy store’s
ability to provide low frequency response and simultaneously charge up under low price
periods for later high price dispatch. This fits in with the fact that Figure 7.8 suggests that
even for a relatively inefficient energy store, the combined total revenues including
arbitrage are greater than the frequency response revenues for some settlement periods.
However, when the wind farm is integrated with the energy store, the cost of smoothing
the wind output to meet the frequency response technical requirements typically
diminishes this benefit. The next section therefore considers how an energy storage
system and wind farm could operate to maximise mutual benefits, whilst avoiding the
challenge of having to smooth the wind.
7.4.3 Affiliated Energy Store Revenues
This optimisation of the operation of a combined energy store and wind farm is the
subject of a patent application [162].
0
1
2
3
4
5
6
7
8
<49.
5
49.5
<f<4
9.6
49.6
<f<4
9.7
49.7
<f<4
9.8
49.8
<f<4
9.9
49.9
<f<5
0.0
f=50
50.0
<f<5
0.1
50.1
<f<5
0.2
50.2
<f<5
0.3
50.3
<f<5
0.4
50.4
<f<5
0.5
50.5
<f
Frequency Band (Hz)
Lo
g(T
ime in
Ban
d)
Figure 7.16: Grid Frequency Distribution for 2008 courtesy of National Grid
Section 7.4.1 demonstrated that an energy store could increase the revenue from a wind
farm. However, the round trip losses of the VRFB and the typically low differential
between system prices combined meant it could not provide increased revenue from

- 198 -
power smoothing, which itself was a prerequisite of providing frequency response
services. Section 7.4.2 therefore considered whether an independent energy store would
have higher revenues, as it would have no requirement to provide wind smoothing. Whilst
it was found that this was the case under some circumstances, it also found that the
frequency response revenues were diminished as the energy store could not use the wind
farm’s capacity to offer additional high frequency response services. This section
considers an optimal configuration of a wind farm and energy store, here called an
“affiliated” energy store.
Figure 7.16 shows the distribution of the power system’s frequency during the year 2008.
Noting the logarithmic axis, it highlights that the frequency spends the vast majority of the
time very close to the target of 50Hz. Figure 4.16 illustrated that the response to a
deviation in frequency, from 50Hz, by a frequency responsive plant should be
proportional to the magnitude of the frequency deviation. Hence, the vast majority of the
time, the limits of the frequency response reserve are not used. Whilst Figure 7.8
suggested that for several settlement periods each day an energy store could earn higher
revenue from combining arbitrage with frequency response provision. It is possible to
provide both arbitrage and margin for frequency response; during the time period that the
VRFB is charging it has the capacity to offer low frequency response equivalent to
Equation 7.11, whilst the high frequency response would be capped by Equation 7.12. The
corollary of this is that when the store is discharging into peak demand periods, it could
offer no response, but would be earning higher revenues from the value of its energy.
Equation 7.11 RatedeChLow
PPP += arg where PRated is the energy store’s rated power, PCharge
the charging power and PWindfarm is the wind farm’s output.
Equation 7.12 ( )WindfarmeChRatedHigh
PPPP +−= arg where ( )eChRated
PP arg− is the “residual
capacity” of the VRFB to charge at a faster rate.
Operating the VRFB in this manner would put the wind farm output at risk of being
spilled, if high frequency response greater than the residual capacity of the VRFB is
required, then the wind farm would have to reduce its output. Reducing the wind farm’s
output would lead to lost revenue, primarily through the loss of ROCs. Therefore, when
charging an energy store for later dispatch, there can be an economic gain from providing
frequency response (through the frequency response payments) which must be traded off
against the risk of lost ROCs revenue should high frequency response by required.

- 199 -
Figure 7.17: Optimal control of wind and energy storage in tandem
There is an optimal charging rate where the arbitrage and frequency response revenues are
balanced against the risk of losing ROCs. This trade off is illustrated by Figure 7.17, when
the frequency is exactly 50Hz, the combined output tracks below the available wind
power and the energy store charges. If the frequency falls, the energy store can reduce its
charge rate or even discharge, such that the total output power is the available wind power
plus the energy store’s rated power. If there is a small positive frequency deviation, the
energy store would increase its charging rate, however, for a large positive frequency
deviation, the wind farm would have to activate its balance controller and spill wind as
well. The frequency distribution of frequency shows though that such high frequency
events resulting in spilt wind are rare (the right plot in Figure 7.17 is a simplification of
Figure 7.16).
Figure 7.18 considers the overall revenue that would accrue to a wind farm and affiliated
energy store as a result of the increased frequency response payments from putting more
of the wind farm’s output ‘at risk’. The left hand side of the peak shows a near linear
initial rate of increase of revenue with increased charging rate, reflecting the very low
probability of a high frequency event ever leading to spilt wind. However, the fall off in
revenue as the charging rate exceeds the peak is rapid as the loss of ROCs dominates the
increased frequency response revenues.

- 200 -
0
20
40
60
80
10
0
0.05
0.2
0.35
0.5
0
2
4
6
8
10
12
14
16
18
Net Revenues
Initial charging rate (%)
Storage Size (% of Wind Farm Rating)
Figure 7.18: Optimal Charging Rate of an Energy Store with a Wind Farm
Figure 7.18 suggests that the optimal charging rate for maximum revenues is around 70%
to 80% of the rated power capacity of the energy store. This leaves relatively little power
capacity available for the high frequency response margin from the energy store before
wind must be spilled; therefore it illustrates the steepness of the frequency distribution in
Figure 7.16.
It should be noted, that this increase in frequency response capacity is only available
whilst the energy store is charging. Owing to the finite capacity of energy storage, it will
have a period of reduced frequency response capacity during its discharge period.
However this period still generates high revenue as the store takes advantage of the energy
price differential instead.
7.4.4 Arbitrage Impacts
Figure 7.19 illustrates the critical importance of round trip efficiency to the revenues from
arbitrage of an independently operated energy store with 3 hours storage capacity. The
practical round trip efficiency from today’s VRFBs is around the breakeven point from
arbitrage. However, this is well short of the theoretical efficiency possible from the VRFB
(see Table 9.9) of around 85% for the full system. Hence, the results shown here are
highly sensitive to small technological improvements to the VRFB’s practical efficiency.

- 201 -
-£150.00
-£100.00
-£50.00
£0.00
£50.00
£100.00
£150.00
£200.00
£250.00
£300.00
£350.00
£400.00
0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95
Average Round Trip Efficiency (pu)
Annual A
rbitr
age R
evenue (
Thousand £
/MW
inst
alle
d)
Figure 7.19: Potential Annual Arbitrage Revenues - Dependence on Round Trip Efficiency
7.5 Net Present Value
7.5.1 Integrated Energy Store
Incorporating the costs of the VRFB into the analysis allows the viability of this
application to be assessed. Hence the Net Present Value (NPV) over a 20 year period with
a 4% discount rate has been calculated for the various energy store capacities under the
three economic scenarios.
-£300
-£250
-£200
-£150
-£100
-£50
£0
0 5 10 15 20 25 30 35
Power Rating (% of Wind Farm's Rating)
NP
V (
Mill
ion
£)
1 hour
3 hours
6 hours
10 hours
Figure 7.20: Net Present Value of VRFB over 20 year life under Low scenario

- 202 -
-£120
-£100
-£80
-£60
-£40
-£20
£0
£20
£40
£60
0 5 10 15 20 25 30 35
Power Rating (% of Wind Farm's Rating)
NP
V (
Mill
ion £
)
1 hour
3 hours
6 hours
10 hours
Figure 7.21: Net Present Value of VRFB over 20 year life under Mid scenario
-£40
-£20
£0
£20
£40
£60
£80
£100
£120
£140
0 5 10 15 20 25 30 35
Power Rating (% of Wind Farm's Rating)
NP
V (
Mill
ion £
)
1 hour
3 hours
6 hours
10 hours
Figure 7.22: Net Present Value of VRFB over 20 year life under High scenario
The results are shown in Figure 7.20 to Figure 7.22. This illustrates that under current
system prices and frequency response prices (Low scenario); the VRFB cannot provide an
economically viable service, when in conjunction with a wind farm, as all NPVs are
negative. However, under the forecasts for expected price increases (Mid scenario) or high
price increases (High scenario), some of the high power, low energy rating systems show
a significantly positive NPV.
Figure 7.8 demonstrated that the average differential price achieved with arbitrage
decreases for longer term energy stores. This is due to there only being few peak price

- 203 -
settlement periods in each day (see Figure 7.5). Furthermore, in order to provide primary
and secondary frequency response the energy store only needs to be rated for sufficient
energy capacity to charge or discharge at full power for a single settlement period. Hence
a store rated for full power for a single hour is sufficient (assuming it starts a settlement
period at 50% SOC) to meet frequency response needs. Adding energy capacity is
expensive and offering frequency response capacity accesses most of the value. This is the
reason for low energy rating stores outperforming longer term stores; however, higher
round trip efficiency would preferentially improve the economics of higher energy
capacity stores by improving arbitrage economics.
The comparative benefit of higher power rating of the energy store is again owed to the
relatively low benefit that can be derived from smoothing the wind power output. Higher
power rating stores can dedicate a greater proportion of their energy capacity to providing
frequency response reserves.
Payback Period (years) Power Rating (% of Wind farm MW rating)
Power Rating (MW)
Energy Rating (hrs) Low Mid High
1 x x 15 3 x x 15 6 x x 13
10.00% 30
10 x x 16 1 x x x 3 x x 9 6 x x 16
15.00% 45
10 x x 17 1 x x x 3 x x 15 6 x x x
20.00% 60
10 x x 16 1 x x 10 3 x x 13 6 x x 17
25.00% 75
10 x x 17 1 x 14 6 3 x 19 9 6 x x 14
30.00% 90
10 x x 17 1 x 13 6 3 x 15 7 6 x x 10
33.33% 100
10 x x 17
Table 7.4: VRFB Deployment Payback Periods (x = Not paid back within 20 years)
The negative NPVs of the low case, even with this low discount rate, indicate that
developing a project today would be extremely high risk and likely to deter investors.
Even under the central scenario the returns are modest at best. As development of such a
storage project would be highly capital intensive it is also of interest to compare the
payback periods, which are shown in Table 7.4. These are discounted payback, rather than

- 204 -
simple payback periods, but the lack of a short term payback under the central scenario
suggests that this would not represent a desirable investment. Whilst some ratings promise
relatively short payback periods under the high scenario, this is likely to be insufficient to
prove attractive unless price rises are at the upper end of forecasts.
7.5.2 Optimal Power Rating
Figure 7.23 shows the effect that increasing power capacity has on the total revenues of a
combined wind farm and energy store. The broad trend is not a linear one, with increasing
power capacity leading to greater revenue benefit for larger stores. This connects with the
assertion that the storage facility would be better deriving revenue from frequency
response and arbitrage, rather than through avoiding imbalance penalties. This in turn also
corroborates the payback periods shown in Table 7.4, where the higher power capacity
energy stores are the ones achieving the shorter payback periods.
The optimal power rating of an energy store, if it must be operated in conjunction with the
wind farm, can be found by considering the traded energy sales. Figure 7.10 shows that
under each of the 3 scenarios, the highest energy sales were achieved with an energy store
rated at 25 to 30% of the wind farm’s rating, aside from the case with no storage. Given
the high capacity factor of the wind farm considered here, the lower of these values is
therefore recommended as an approximate guide.
0.00%
2.00%
4.00%
6.00%
8.00%
10.00%
12.00%
14.00%
16.00%
0.00% 5.00% 10.00% 15.00% 20.00% 25.00% 30.00% 35.00%
Power Capacity as % of Wind Farm's Rating
% In
cre
ased
Reven
ue
1 hour
3 hours
6 hours
10 hours
Figure 7.23: Comparison of VRFB's Benefit to a 300MW Wind Farm (Mid Case)

- 205 -
7.5.3 Optimal Energy Rating
Figure 7.24 through Figure 7.26 show the Net Present Value (NPV) of various different
storage ratings assessed over 20 years, under the three economic scenarios. This illustrates
the optimal energy store size, as the lower power ratings (10-20%) typically have higher
(less negative) NPV at 3 to 6 hour ratings, whilst the larger power ratings typically have
higher NPV at 1 to 3 hours. This is a consequence of the greater proportion of revenue
derived by larger stores from frequency response services, which require only limited
energy capacity. The high energy ratings at high power ratings are rarely required, whilst
the high energy ratings at lower power ratings are frequently required for wind smoothing.
This is because wind gusts and lulls of greater than 30% magnitude lasting an hour or
more are orders of magnitude rarer than wind gusts or lulls of 10% magnitude lasting an
hour (note the exponential scale of Figure 7.3). Large unforecast peaks and troughs in
wind output tend to be transient in nature.
Overall, the trends of Figure 7.24 to Figure 7.26 suggest that the optimal energy rating of
a VRFB in conjunction with a wind farm is likely to be around 3 hours or less at full
power output. This is likely to shift to higher energy capacities as and when the round trip
efficiency of these batteries improve, as lower differential market prices would become
profitable for arbitrage. However, this corroborates Prudent Energy and GE Energy’s
modular system size which, whilst expandable, currently typically has a two hour rating as
a base point.
-£300
-£250
-£200
-£150
-£100
-£50
£0
0 2 4 6 8 10 12
Energy Rating (hr)
Net P
resent V
alu
e (
Mill
ion £
)
10% Store
15% Store
20% Store
25% Store
30% Store
33% Store
Figure 7.24: Net Present Value (20 year lifetime) of Different Power and Energy Rating Stores under
Low Economic Case

- 206 -
-£120
-£100
-£80
-£60
-£40
-£20
£0
£20
£40
£60
0 2 4 6 8 10 12
Energy Rating (hr)
Net P
resent V
alu
e(M
illio
n £
)
10% Store
15% Store
20% Store
25% Store
30% Store
33% Store
Figure 7.25: Net Present Value (20 year lifetime) of Different Power and Energy Rating Stores under
Mid Economic Case
-£40
-£20
£0
£20
£40
£60
£80
£100
£120
£140
0 2 4 6 8 10 12
Energy Rating (hr)
Net P
resent V
alu
e(M
illio
n £
)
10% Store
15% Store
20% Store
25% Store
30% Store
33% Store
Figure 7.26: Net Present Value (20 year lifetime) of Different Power and Energy Rating Stores under
High Economic Case
From the analysis, it is clear that 6 or 10 hours of storage capacity is unlikely to be viable
in the near future, owing to the very low average differential price from arbitrage and the
significantly higher capital cost of such a large capacity. However, it should be noted that
a significant benefit of flow battery solutions is that the energy capacity can be adapted by
addition or enlargement of the tanks of electrolyte at a comparatively low cost. This is
achievable at a significantly lower cost than implementing a completely new system, as
whilst the power cost of the VRFB is high compared to other technologies, the energy cost
is comparatively low (see Figure 5.1 and Figure 5.2).

- 207 -
7.5.4 Affiliated Energy Store Revenues
Figure 7.27 shows the comparative NPVs of a 75MW VRFB, with 3 hours capacity, based
on whether the energy store is fully integrated with the wind farm, as in section 7.4.1,
fully independent as in section 7.4.2, or merely affiliated to a particular wind farm as in
section 7.4.3. This shows the benefits of the affiliated method, which combined arbitrage
with providing higher volumes of frequency response by offering additional high
frequency response from the wind farm. This scheme offered a slight improvement over
the independent energy store case, which in turn was significantly improved over the case
where the energy store was integrated with the wind farm.
This plot illustrates that under the central projection, both the independent and the
affiliated energy store have positive NPV, indicating that they would represent
investments that would payback. However, none of the options offers a positive NPV
under the low projection, raising the level of risk of developing such a project and
deterring investment. This highlights the problem identified by the Electricity Market
Reform; the capital cost of investing in storage or other assets for peak load operation is
not supported by the energy only market. However, there is a new capacity mechanism
proposed to solve this problem. Given that the NPVs, under the low projection, of the
independent and affiliated energy stores are relatively small negative values, it is entirely
possible that the capacity mechanism may provide sufficient support to energy storage to
make such projects viable in the medium term.
-100
-50
0
50
100
150
Fully integrated with wind Fully independent Partially integrated with wind
NP
V (
Mill
ion £
)
NPV after 20 years Low
NPV after 20 years Mid
NPV after 20 years High
Figure 7.27: NPV Comparison of the Different Storage Integration Options (75MW, 3 hour store over
20 years)

- 208 -
7.5.5 Discount Rate Sensitivity
Table 7.5 to Table 7.7 show the sensitivity of the NPV calculations to discount rates. The
three tables are all for a 75MW, 3 hour store but for the three applications of the energy
store: integrated with a wind farm, totally independent and affiliated with a wind farm. As
expected, the NPVs are highly sensitive to the discount rates applied, however, owing to
the nature of compound interest, those cases with short payback periods suffer less than
those with longer payback periods. This means that the cases with attractive payback
periods of significantly less than 10 years only see a lengthening of payback period of 1-2
years with the higher discount rates. However, high discount rates do mean that the
independent and affiliated energy stores would not pay back under central projections.
Net Present Value (Million £) Payback Period (years) Discount
Rate (%) Low Mid High Low Mid High
4 -85.9 -21.5 36.0 x x 13
8 -105.0 -50.0 6.2 x x 15
12 -117.2 -63.1 -12.7 x x x
Table 7.5: Integrated Energy Store NPV Sensitivity to Discount Rate
Net Present Value (Million £) Payback Period (years) Discount
Rate (%) Low Mid High Low Mid High
4 -24.6 43.3 105.1 x 14 7
8 -59.0 1.6 58.0 x 20 7
12 -80.9 -24.7 28.2 x x 9
Table 7.6: Independent Energy Store NPV Sensitivity to Discount Rate
Net Present Value (Million £) Payback Period (years) Discount
Rate (%) Low Mid High Low Mid High
4 -8.6 61.4 124.9 x 12 6
8 -47.1 15.3 72.9 x 16 7
12 -71.4 -14.0 39.9 x x 7
Table 7.7: Optimal Energy Store and Wind Farm NPV Sensitivity to Discount Rate
7.6 Alternatives to Storage
The preceding analysis used reasonable projections for the cost of a VRFB, likely
revenues in the energy and frequency response markets and appropriate discount rates to
assess the NPVs of VRFB energy storage on the GB system. It has found that under the
central projection, energy storage is likely to have positive net present value for providing

- 209 -
frequency response and arbitrage when operating as an independent store. This positive
NPV can be improved if the energy store can affiliate itself to a wind farm and use the
wind farm’s capability for providing high frequency response to offer greater frequency
response capacity when charging up for arbitrage.
The challenge for the VRFB is that the payback periods, combined with the lack of a
guaranteed payback under worst case projections suggest that it may remain too risky an
investment for this application alone. This assessment considered the open markets from
which a storage owner could presently earn a return. The Electricity Market Reform may
lead to higher payment for storage’s firm capacity, which could in turn tip the economics
in favour of storage. Failing this, a VRFB owner would have to be able to accrue the
revenue from other benefits it could provide, such as constraint management or grid
capacity upgrade deferral. These revenue streams are less accessible to an independently
owned storage operator, however.
In view of the questionable economics of storage to provide frequency response services,
it is worth briefly considering the alternatives.
7.6.1 Curtailment of wind power
Figure 7.28: Plot of hourly electricity demand to percentage served by wind from Sinden [163] (red
elements are superimposed and show the curtailment of energy if wind were curtailed at 50% of
demand and 33GW were installed on the GB system, rather than Sinden’s 25GW)
If energy storage does not provide frequency response services on behalf of a wind farm,
it is likely that at times of high wind and low demand; the wind farm may have to provide
the service instead. This implies a level of spilt wind as the turbines regulate output down
in order to hold the margin required for frequency response. Sinden [163] has conducted

- 210 -
an extensive analysis using 33 years of wind data from 66 weather stations and compared
this with demand data so as to assess the correlation between the two. He has shown that
wind power has a weak positive correlation with demand in the UK, such that wind
power’s capacity factor during peak demand hours is around 30% higher than the annual
average. Sinden has considered the case where the UK has 25GW of installed wind
capacity and a peak demand of 60GW; he has shown the percentage of hourly energy
served by wind, which is shown in Figure 7.28.
Sinden’s work was based on 25GW of wind development in the UK. If this were scaled up
to 33GW (see section 2.6.1) and Sinden’s limit of wind power providing 50% of demand
remained, then wind power plants could have to spill wind energy approximately 8% of
the time to ensure their output does not exceed 50% of supply. This would lead to an
annual energy loss of around 3%. This in turn would put a significant additional cost on
wind farms, demonstrating the potential additional value of storage for managing this
form of constraint.
7.6.2 Interconnection
Section 2.4.2 showed the ambition of the European Union to move to a more
interconnected grid for Europe, to allow both a free market in electricity and to
accommodate greater renewable energy deployment. In theory such interconnectors could
provide the frequency response services required by the GB grid. However, the current
operation of interconnectors is based almost entirely on the energy price differential
between different countries. It would require an improvement in the economics of
provision of frequency response in order for interconnectors to hold capacity purely for
the purposes of frequency response margin. Such an improvement in these economics
would in turn lead to a more favourable return on any energy storage developments as
well.
7.6.3 Conventional Generation
Figure 7.29: Frequency Response Instructions Distribution from Pearmine [164]

- 211 -
Frequency response is presently provided by part loaded conventional generation,
traditionally predominantly coal fired as illustrated in Figure 7.29. However, as Coal
plants are decommissioned due to the Large Combustion Plant Directive and concerns
over CO2 emissions, the principle conventional generation source that could fill the
frequency response gap is Combined Cycle Gas Turbines (CCGT).
Figure 7.30: NOx and CO Emissions from CCGT Plant According to Tauschitz and Hochfellner [165]
Figure 7.31: Part Load Efficiency of CCGT Plant According to Tauschitz and Hochfellner [165]
Tauschitz and Hochfellner [165] have shown that the typical efficiency of CCGT is
significantly affected by operating at part load. Typically a CCGT can regulate its output
power down to around 50% before the non-linear increase Nitrous Oxide (NOx) and

- 212 -
Carbon Monoxide (CO) emissions reach environmental limits. This is shown in Figure
7.30. Hence, in order for a typical CCGT to offer equal high and low frequency response
capacity it would be regulated down to around 75% of maximum output.
Figure 7.31 illustrates that if a CCGT is regulated down to around 75% of its rated output
it would reduce in efficiency by around 3%. Furthermore, according to Pearmine [164],
such a fossil fuel plant could only be relied on to deliver 55% of its frequency response
holding. Here the net effect on emissions is considered.
First, for simplicity it is assumed that CCGTs are operated to provide 600MW of low and
high frequency response, based on Figure 2.23. Based on delivery of only 55% of this, the
frequency response holding would have to be:
Equation 7.13 MWPFR
109055.0
600== where PFR is the frequency response holding.
Assuming the CCGTs are operated at 75% output, this holding would be distributed
across:
Equation 7.14 MWPTot
436075.01
1090=
−= of plant.
The Department of Energy and Climate Change [166] has created estimates of the Carbon
Intensity of power generation in the UK, which is shown in Table 7.8.
Source Carbon Intensity (χ) (kgCO2/MWh)
CCGT 380 UK Average 550
Table 7.8: Carbon Intensity of Electricity Generation in the UK
Initially, prior to deloading to hold a low frequency response margin, the CCGT plant will
have a CO2 output of:
Equation 7.15 htonnesPmCCGTTotCO
/165738043602
=⋅=⋅= χ
However, after the deload instruction, the frequency response holding would have to be
replaced on the system. Here we consider two conditions, either that this is replaced by
more CCGT plant coming online, or that the shortfall is picked up across all generators,
thereby incurring the average Carbon intensity of the power system. Either way the total
Carbon emissions are given as:

- 213 -
Equation 7.16 ( )
χχη
⋅+⋅−
=FRCCGT
CCGT
FRTot
COP
PPm
'
2
where ηCCGT is the CCGT relative
efficiency at that load from Figure 7.31.
If we assume CCGT plant fills the gap created by deloading this plant, the total CO2
emissions now become:
Equation 7.17 ( )
htonnesmCCGT
CO/16953801090380
97.0
109043602
=⋅+⋅−
=
Or if we assume an average mix of current power stations fills the gap, the total CO2
emissions become:
Equation 7.18 ( )
htonnesmMix
CO/18815501090380
97.0
109043602
=⋅+⋅−
=
So the Carbon Intensity of providing 600MW of high and low frequency response holding
can be calculated as:
Equation 7.19 ( )
MW
mmm
COCOFR
CO 60022
2
' −=
For the CCGT only, and average power mix cases, this translates to a Carbon Intensity for
holding frequency response equivalent to:
Equation 7.20 ( )
MWhkgCOMW
FR
CCGT/63
600
165716952=
−=χ
Equation 7.21 ( )
MWhkgCOMW
FR
Mix/373
600
165718812=
−=χ
This shows that providing frequency response from storage as opposed to deloaded CCGT
plant could lead to substantial CO2 savings. These savings are between 17% and 98% of
the emissions saved from renewable energy displacing each MWh generated by CCGTs in
the generation mix.
Currently onshore wind power receives 1 ROC per MWh and each MWh typically
displaces a MWh from a CCGT plant thereby saving 380kg of CO2. Offshore wind, a less
mature technology although arguably more mature than flow battery storage, receives 2
ROCs per MWh with the same effect on total emissions. This analysis suggests that ROCs
targeted at storage for frequency response could have a beneficial effect on total Carbon
emissions.
The analysis shows a significant environmental benefit to providing frequency response
from energy storage rather than conventional plant. It does not consider the environmental
benefit of providing arbitrage from storage, thereby avoiding the need to have polluting
peaking plants running during peak periods and hence reducing the average Carbon

- 214 -
intensity of UK generation. Instead, this final section is intended to promote discussion.
On the basis of this analysis a targeted subsidy could both act to make storage
economically viable and prove to be an effective means of reducing emissions. A Brunel
Institute of Power Systems M.Sc. project will investigate this further.
7.7 Summary
This chapter has shown that VRFBs are close to being commercial viability for
application on wind farms for frequency response.
This chapter has used the models and techniques described in the preceding chapters in
order to assess the economics of providing frequency response from energy storage and
wind power. Section 7.2 introduced the different scenarios that were to be applied to the
power system models in order to generate power output and power reserve profiles from a
wind farm with VRFB energy store. It also showed how this power system data integrated
with an economic model reflecting the behaviour of the electricity market to generate
revenue data from the power data.
Section 7.3 introduced the financial data behind the calculation of the different revenue
streams, including frequency response, imbalance and traded energy market data. It also
presented the different cost scenarios for the VRFB and introduced the discounted cash
flow analysis scenarios that are used later in the chapter. Three different scenarios: low,
mid and high, were introduced to reflect differing economic conditions.
Section 7.4 discussed the potential increase in revenues from the energy store,
demonstrating that excluding the effect of lost ROCs (if applicable) the energy store could
increase the total revenue of the wind farm in most scenarios. However, it also showed
that integrating it with a wind farm led to lower revenues than independent operation
owing to round trip losses in the VRFB outweighing reduced imbalance penalties from
improved predictability. Against this it showed the advantage of being able to share
responsibility for high frequency provision with the wind farm through access to higher
holding payments. Hence, the concept of an affiliated energy store was developed which
promised incrementally improved revenues.
The revenues from the energy store led into an assessment of the present value of different
storage developments in section 7.5. Whilst this found that some cases produced positive
present value under the central projection, none achieved this under the low revenue
projection and payback periods were shown to be typically too long for an attractive
investment under the central and high revenue projections.

- 215 -
If storage cannot provide frequency response, then it must be provided elsewhere and
section 7.6 explores this. It shows that if wind farms are to provide frequency response
then there will be a small but significant impact on energy yields. Furthermore, the section
introduces the reasons why if conventional CCGT plant is increasingly the source of
frequency response provision this leads to a negative environmental impact and higher
CO2 emissions. This illustrates that storage for frequency response can save CO2 and
should perhaps have a specific support mechanism to bring it to commercial maturity.

- 216 -
8 Conclusions and Further Work
8.1 Modelling of Wind Turbines
The UK has set itself ambitious targets to reduce the carbon intensity of the power
generation sector over the coming decades. The specifics of the UK’s subsidies, seabed
geology and conservative approach to development mean that these targets are in large
part likely to be met with widespread deployment of offshore wind farms. The
development of the offshore wind resource is likely to present significant challenges to the
power system’s frequency stability owing, in part, to wind’s intermittency.
Advances in both Grid Codes and power electronics have driven the wind industry
towards increased use of full converter interfaced wind turbines. The power electronic
interface decouples the generator from the grid system, offering flexibility through
control, but removing the generator’s natural inertial response from the grid. Active power
control from large offshore wind farms is therefore an area of increasing importance to
ensure the power system’s future stability. The use of full converters in wind turbines
permits a range of different control philosophies and physical systems as outlined below:
• In-direct speed control of the turbine (conventional) versus direct speed control
(subject to some renewed commercial interest).
• Blade pitch control as a speed controller versus a power controller.
• Real power control on the grid side inverter versus real power control on the
generator side rectifier.
• Permanent magnet generators versus electrically excited generators.
• Synchronous or asynchronous generators.
• Direct-drive or geared shaft systems.
This project has therefore delivered a suite of validated full converter wind turbine
models. These have been used to investigate the implications of moving to direct-drive
permanent magnet generator based wind turbines, and the effect of directly speed
controlling a wind turbine, on the grid interface.
Direct speed control of the wind turbine, which offers a potential means of incremental
improvement to the wind turbine’s energy yield, is shown to require increased torque
swings in order to improve the tracking of the optimal power coefficient. Furthermore, the

- 217 -
dynamic response is shown to largely depend on the torque limit and the speed controller
performance.
Use of permanent magnet excitation in generators leads to an intrinsic link between speed
and open circuit voltage, meaning that over-speed of a permanent magnet generator based
wind turbine risks leading to excess voltages on the power converter. Whilst it is shown
that voltage can be controlled by a pseudo field-weakening approach when the rectifier is
switching with four quadrant operation, this control method is insufficient to protect the
power converter from over-voltage in the event of a drive trip leading to uncontrolled
diode bridge rectification. Furthermore, direct-drive shafts are shown to be at risk from
mechanical oscillations at higher frequencies than the conventional geared shafts.
Excitation of this mechanical resonance would risk imposing a transiently high generator
speed with a corresponding over-voltage transient on the power converter.
The requirement to equip a PMG based wind turbine with a chopper and dynamic brake
resistor has led to a decoupling of machine and grid dynamics. This led to the
development of a simplified model of this type of wind turbine where the DC link
controller on the machine bridge directly effected a torque on the shaft model. This
removed the need to represent the generator and the majority of the machine bridge
control thus increasing computational efficiency for longer time scale modelling.
8.2 Grid Connection of Wind Turbines
The mechanical resonance of a PMG shaft combined with its intrinsic voltage dependence
on speed and high stator reactance are shown to lead to particular challenges under grid
faults. An electrically excited machine can rely on field weakening to reduce terminal
voltage and thereby avoid the power converter’s maximum voltage limits under grid
faults. However, the magnetic energy in the PMG’s stator reactance must transfer to the
power converter’s DC link in order for the PMG’s torque to be reduced during a fault; this
inherently drives up the DC link voltage. With direct drive permanent magnet generators,
this increase in DC link voltage has the potential to exceed the rated DC link voltage for
the power converter. Furthermore, the rapid torque reduction could excite the shaft
mechanical resonance and lead to a transient over-voltage on the power converter’s stator
connection. This demonstrates the importance of choppers and dynamic brake resistors for
protecting the power converter of a PMG under grid faults.
Banham-Hall et al. [80] and section 4.2.5 described a novel, patented, adaptation to the
generator bridge control in order to drive a ramped reduction in a PMG’s torque under a

- 218 -
grid fault. This method, using a specific ramp rate, is shown to significantly reduce the
amplitude of the resulting mechanical resonance. Furthermore, as the generator’s torque is
eventually removed, the brake resistor need only be rated at a reduced energy rating
compared to a full chopper and brake resistor system.
The presence of a dynamic brake resistor, to slow the transient torque changes of a PMG
wind turbine down, has been shown to permit a significant simplification of the model of
a full converter PMG. The machine and rectifier can be removed, with the DC link voltage
controller, which would normally set the rectifier’s per unit real current reference, being
used directly to set the per unit torque to the shaft model. This simplification produces a
model that is faster in simulations and therefore beneficial for frequency response studies,
which require a longer time-scale.
The GB Grid Code has implemented a requirement that necessitates all large (>50MW),
transmission connected, wind farms to be capable of a proportional droop response to grid
frequency disturbances. The power converter can deliver this response extremely quickly
and with direct proportionality, however, the change in power output can then lead to
slower mechanical changes from the wind turbine. Alternatively, the pitch control can be
modified such that changes in the aerodynamic blade performance filter through to a
change in turbine output power. This method offers slower response, but with no residual
mechanical transients. Furthermore, the flywheel effect of the blades can be used to store
energy when the wind turbine is operating in low wind speeds, this energy can then be
used for temporary over-production following a frequency fall. These control methods
were explored in section 4.3.
GB and European transmission system operators have floated the prospect of a
requirement on transmission connected wind farms to provide a synthetic inertial
response. This would require the turbine controller to restore the link between generator
rotational kinetic energy and system frequency. Conventional approaches to providing a
synthetic inertial response typically rely on a measurement of the power systems rate of
change of frequency. However, frequency is typically a noisy signal and the inertial
response therefore has to be either filtered, introducing delay, triggered, removing
linearity, or accepted as subject to noise, which reduces its benefit as a stabilising
influence. Banham-Hall et al. [87] and section 4.3 therefore propose alternatives based on
speed controlling the wind turbine, or generating a synthetic load angle, which offer the
potential of a fast inertial response that is not as sensitive to noise on the power system’s

- 219 -
frequency. These controllers are shown to be tuneable and potentially advantageous over
the predominant controller that relies on a frequency derivative.
8.3 Vanadium Redox Flow Battery Energy Storage
The importance of frequency response from wind farms is growing as the wind industry
grows and as National Grid increases the holding requirement to accommodate potential
larger single generation losses. However, whilst the Grid Code has ensured that technical
solutions are found so that wind farms can participate in frequency control, it does not
address the economic case. Energy storage and battery manufacturers are increasingly
looking to base business cases for energy storage on the ancillary service markets,
including frequency response. As such, the increasing GB requirement for this service,
along with high levels of wind power generation and an islanded system, may present an
opportunity for energy storage on the GB system.
A review of the available energy storage technologies in chapter 5 has found that the high
cycle life, relatively low energy capacity cost, and design flexibility of the Vanadium
Redox Flow Battery makes it a favourable technology for integration with wind power
and combined provision of frequency response. The freedom to independently optimise
the flow battery’s energy and power ratings, together with its higher round trip efficiency
make it preferable to the nearest competitor of thermal energy storage.
A simplified power system representation of the VRFB has been developed and validated,
with accurate representation of battery voltage, round trip efficiency and state of charge.
Furthermore, this model has been integrated onto the DC link of a model of an IGBT
SVC, as these are often already required to provide dynamic reactive power compensation
for large AC connected offshore wind farms. As with the wind turbine, the power
electronic interface offers fast response to grid transients. An adaptation to the wind
turbine grid fault ride-through control is presented in Banham-Hall et al. [138] and section
6.5. This modification allows the battery to be used to support the IGBT SVC’s DC link
during a grid fault and thus ensure continued reactive power delivery to the grid even in
the event of an extended duration severe voltage dip.
Banham-Hall et al. [138] and section 6.5 also explore the control of a VRFB, in
conjunction with a wind farm, to offer frequency response capability to the power system.
A novel fuzzy logic controller is developed which manages the battery’s state of charge
by modifying the planned future energy trades with the power system. Furthermore, the
integrated controller can be scheduled to perform daily arbitrage and wind smoothing,

- 220 -
thereby aggregating multiple different revenue streams for the single storage facility. This
controller is shown to successfully control the battery’s state of charge even in the
presence of significant unexpected wind turbulence. Furthermore, the scheduling of daily
arbitrage is shown to increase the combined frequency response capability of the wind
farm and energy store during the hours when the store is charging. The battery is also
shown to be capable of extremely fast response, with a complete current reversal possible
in a couple of mains cycles. In conjunction with the direct proportional response that the
power converter can achieve with a droop controller, this successfully demonstrates that
the VRFB potentially offers a technically excellent solution to the problem of securing the
grid’s frequency stability with rising levels of wind power.
8.4 Frequency Response from Wind and Energy Storage
Developing the technical potential of wind farms, with or without energy storage, to
provide frequency response services is only one part of the solution. Ultimately the GB
frequency response reserves are selected and optimised through an ancillary services
market. This market based approach means that a particular provider will only be selected
to hold and provide frequency response if they are an economically viable option.
Assessment of the historic trends in frequency response prices, combined with the
projected increase in holding volumes required, suggest that prices for frequency response
are likely to rise in future.
GB technical requirements for provision of frequency response currently require
regulation from a fixed output level. For an intermittent resource, such as wind, this means
that the plant holds a variable reserve margin and excess wind energy is either spilt or
diverted to the energy store. It is found that the round-trip energy losses of the VRFB are
not adequately compensated for by the higher energy price that can be achieved through
reduced imbalance when meeting this requirement. This contributes to the conclusion that
a VRFB’s business case would be damaged if it had to accommodate wind’s variability.
Wind farms have excellent capability to offer high frequency response without continuous
spilling of wind energy. It has been shown, in section 7.4.3, that an energy store combined
with a wind farm can offer increased frequency response reserves whilst the battery
charges (typically at low night time prices) with very little risk of the wind having to be
spilt. Therefore, during periods of battery charging, greater frequency response revenues
could be earned, whilst the stored energy can be released at times of higher price
(typically day time peaks) to maximise revenues. This offers improved revenues over both

- 221 -
an isolated energy store and one fully incorporated with a wind farm. This method is the
subject of a patent application.
Overall, discounted cash flow analysis has shown that a VRFB store can achieve positive
net present value with modest price increases from today. This NPV is worst when the
energy store has to compensate for the wind’s variability, is improved by operating the
energy store entirely independently but is best if the energy store can share high frequency
response capability with the wind farm. Nevertheless, the payback periods associated with
any of these energy store configurations are too long, even under best case projections, to
offer an attractive return to investors. Hence, whilst energy storage looks like it is close to
competitive for provision of frequency response, it is not sufficiently advantageous to
break into the market.
Given that energy storage is unlikely to offer a commercially viable frequency response
solution for the imminent future without targeted subsidy, it is likely that available
conventional CCGT plant will be required to offer this service instead. However,
operating CCGTs at part load has implications for their efficiency and therefore Carbon
emissions. Analysis here suggests that energy storage would be justifiable receiving ROCs
at a rate of at least 0.17ROCs/MWh for providing a frequency response service alone.
This would save emissions and could well tip energy storage towards commercial viability
for this application.
8.5 Future Work
This thesis has concentrated on active power control from large offshore wind farms that
are AC connected to the GB transmission system and consist of full converter interfaced
wind turbines. Whilst this represents a significant proportion of the UK’s likely offshore
wind development, it is not representative of the totality. Indeed whilst chapter 3 focussed
on the development of models of full converter wind turbines, it ignored advances towards
DC generation and distribution. In that context, system frequency has no meaning and
hence frequency response would be entirely dependent on the control system of the wind
farm. Furthermore, delivery of response could be complicated by multi-terminal
connection to different power systems. This is an important area for research as wind
farms are located in deeper water, further from shore.
This project has focussed on the UK’s wind power development and the GB power
system, which is appropriate given that the UK has an advanced de-regulated industry
where ancillary services, such as frequency response, are technically and commercially

- 222 -
well defined. However, frequency response services and requirements differ globally and
it would be of interest to understand whether there are global opportunities for wind or
energy storage to provide ancillary services.
The novel control method of the chopper and brake resistor under grid faults, covered in
section 4.2.5, considers the removal of the primary torsional resonant mode of the drive
shaft. This method could be extended by investigation of other mechanical modes of the
wind turbine system. Currently prototype PMG based wind turbines are on long term
tests, but these do not have to meet the Grid Codes and this method will need to be proven
by site tests as Grid Code testing is conducted. Furthermore, whilst this method offers a
means to minimise the DBR under a single fault there is increasing interest in ensuring
that turbines can ride-through multiple grid faults caused by auto-reclosure of faulted
transmission lines. This would lead to thermal stress to the chopper switch and DBR
which is worthy of further investigation as Grid Code requirements develop.
The development of methods to provide inertial response from wind turbines focussed on
finding control methods that did not require taking the derivative of system frequency.
However, there are two parallel questions worthy of consideration, first, efforts to provide
synthetic inertia have largely focussed on emulating synchronous generators’ behaviour.
However, is this the best method from a power system perspective? Second, it is
understood that with wind speed below rated, inertial response to a low frequency event
would lead to over-production from the turbine and slowing of the rotor. It is known that
this leads onto a period of underproduction as the turbine recovers. This under recovery
has been the subject of a National Grid consultation with industry and it is largely through
an industry consensus that the true value of wind’s inertial contribution can be understood.
However, there is further work to be done here and it is also worth considering the inertial
capability from a wind farm where many turbines are operating under different conditions
and therefore offering different inertial recovery periods.
Chapter 5 compared many different energy storage technologies and concluded that the
VRFB had significant potential across many different time-scales, including for frequency
response applications. However, there is significant investment and innovation in energy
storage suggesting that it is worth tracking developments in the field. Of particular interest
are advancements in high temperature batteries, thermal energy storage and any advances
in the VRFB’s round trip efficiency, any of which could have a significant impact on the
commercial viability of energy storage.

- 223 -
Whilst it has been highlighted that provision of frequency response from wind power
would involve spilling wind energy and therefore incur a cost. Chapter 7 referenced work
considering wind curtailment as a proportion of demand, but still there is no
comprehensive study on the likely practical requirement for wind farms to provide
frequency response services as wind power grows.
The commercial analysis of energy storage and wind focussed on the economics under the
current market structures. It is anticipated that, when finally formulated, the capacity
mechanism introduced by the electricity market reform will significantly alter the
financial landscape. Such a scheme could well create a favourable environment for storage
projects and thereby accelerate commercial deployment.
A brief analysis in chapter 7 showed that energy storage for frequency response could
offer potential Carbon savings over the use of gas plants. However, energy storage could
potentially offer Carbon benefits in a greater range of applications through ensuring that
the power system operates with the least Carbon intensive plants. Such a study ought to
form the basis of a critical appraisal of the level of specific subsidy support that would be
appropriate in order to incentivise the energy storage industry.
Chapter 4 onwards has highlighted that operation of wind to provide frequency response
from a fixed output power has a significant hidden cost. National Grid take a significantly
different perspective on the technical requirements of frequency response to many other
system operators, who prefer the delta control requirement. There is significant scope for
quantifying whether National Grid’s approach would truly lead to more reliable reserve or
whether it will just shut wind power out of offering this service.
Finally, this thesis has to a large extent focussed on the situation in Britain, however,
some other small islanded networks, with extensive wind deployment, may reach
commercial viability for storage earlier. Ireland is one such example. Further work
addressing such systems may well prove fruitful.

- 224 -
9 Appendices
9.1 Wind Modelling
9.1.1 Ziggurat Algorithm
Figure 9.1: Ziggurat Algorithm Implementation
function [output,rand1,rand2,rand3,sign4] = fcn(u1,u2,u3,s4,ki,wi,r) % This block calculates the output according to a linear congruential
generator % The constants for the generator are from the Numerical Methods
generator m = 2^32; a = 1664525; c = 1013904223; % Initialise dummy variables temp = u1; temp2 = u2; temp3 = u3; temp4 = 10; temp5 = 1; temp6 = s4; gen = 0; % Initialise variables according to previous values to ensure they are
set on all executions rand_out = u1; rand1 = temp; rand2 = temp2; rand3 = temp3; % Determine output's sign s_int = a*temp6+c; temp6 = mod(s_int,m); s_rand = uint32(temp6); s_bit = bitget(s_rand,17); if s_bit ==1 sign = 1; else sign = -1; end sign4 = temp6; while gen == 0 int = a*temp+c; temp = mod(int,m); rand1 = temp; rand_temp = temp; % Use the top 32 bits of Java's LCG index_int = bitand(uint32(rand_temp),uint32(255));

- 225 -
index = double(index_int)+1; % Use the eight MSBs as the
index if rand_temp < ki(index) rand_out = rand_temp*wi(index); % Set x output inside Ziggurat
rectangle gen = 1; elseif index == 1 x = 2; while temp5 < temp4 int2 = a*temp2+c; int3 = a*temp3+c; temp2 = mod(int2,m); temp3 = mod(int3,m); x = (-log(temp2/2^32))/r; y = -log(temp3/2^32); temp4 = x^2; temp5 = 2*y; end rand_out = x; gen = 1; end rand2 = temp2; rand3 = temp3; end output = 5*sign*rand_out; % Set the output on a unitary
scale
9.2 Full Energy Storage Comparison
9.2.1 Pumped Hydro
Source CIGRE Deane Ibrahim Kazempour EU ESA Chen Averages
Energy Cost ($/kWh Low) 40 5 22.5
Energy Cost ($/kWh High) 200 100 150
Power Cost ($/kW Low) 500 627 667 187 600 600 530.2
Power Cost ($/kW High) 2896 800 907 3000 2000 1920.6
O & M Cost (% of initial capital) 6.0% 6.00%
Cycle Life 20000 20000
Maximum Age (years) 50 50 50
Specific Energy (kWh/kg) 0.001 0.001
Specific Power (kW/kg)
Round Trip Efficiency (%) 77.5% 72.5% 67.0% 77.5% 76.0% 74.10% Self Discharge
(%/month) 0 0.00%
Response Time (ms)
Table 9.1: Pumped Hydroelectric Characteristics
9.2.2 Compressed Air Energy Storage
Source Ibrahim EPRI DTI EU ESA Chen Averages
Energy Cost ($/kWh Low) 0.1 30 2 10.7 Energy Cost ($/kWh High) 30 534 100 50 178.5
Power Cost ($/kW Low) 350 500 224 500 400 394.8
Power Cost ($/kW High) 660 1000 800 820.0

- 226 -
O & M Cost (% of initial capital)
Cycle Life 7000 15000 11000.0
Maximum Age (years) 30 25 30 28.3 Specific Energy (kWh/kg) 0.045 0.045
Specific Power (kW/kg) Round Trip Efficiency (%) 70.0% 75.0% 74.0% 73% Self Discharge (%/month) 0 0.0%
Response Time (ms) 2000 2000.0
Table 9.2: Compressed Air Energy Storage Characteristics
9.2.3 Lead Acid
Source Divya Ibrahim Dufo-Lopez CIGRE DTI EU ESA Chen Averages
Energy Cost ($/kWh Low) 66.7 160 150 305 200 200 180.3 Energy Cost ($/kWh High) 200 334 200 707 1100 400 490.2
Power Cost ($/kW Low) 350 300 325.0
Power Cost ($/kW High) 800 600 700.0
O & M Cost (% of initial capital) 2.5% 2.5%
Cycle Life 1500 1055 1000 500 750 961.0 Maximum Age
(years) 10 10.0 Specific Energy
(kWh/kg) 0.025 0.022 0.043 0.035 0.025 0.045 0.033 Specific Power
(kW/kg) 0.5 0.19 0.19 0.293 Round Trip
Efficiency (%) 75.0% 90.0% 72.5% 80.0% 78.0% 74.0% 78.3% Self Discharge
(%/month) 3.5% 2.5% 2.5% 3.5% 6.0% 3.6% Response Time
(ms) 3 3.0
Table 9.3: Lead Acid Battery Characteristics
9.2.4 Nickel Cadmium
Source Divya Ibrahim Dufo-Lopez CIGRE DTI EU ESA Chen Averages
Energy Cost ($/kWh Low) 267 934 600 267 700 800 594.7 Energy Cost ($/kWh High) 800 1001 2000 1500 1325.3 Power Cost ($/kW Low) 600 500 550.0 Power Cost ($/kW High) 2000 1500 1750.0
O & M Cost (% of initial capital) 0.0% 0.0%
Cycle Life 3000 1850 2500 1500 1500 2250 2100.0 Maximum Age
(years) 15 15.0 Specific Energy
(kWh/kg) 0.063 0.05 0.075 0.07 0.05 0.063 0.1 Specific Power
(kW/kg) 0.1 0.225 0.225 0.2 Round Trip
Efficiency (%) 75.0% 75.0% 70.0% 70.0% 63.0% 70.6%

- 227 -
Self Discharge (%/month) 12.5% 12.5% 12.00% 12.3%
Response Time (ms)
Table 9.4: Nickel Cadmium Battery Characteristics
9.2.5 Sodium Sulphur
Source Divya Dufo-Lopez Kazempour CIGRE EPRI DTI EU ESA Chen Averages
Energy Cost ($/kWh Low) 133 250 192 227 200 300 217.0
Energy Cost ($/kWh High) 400 350 585 1000 500 567.0
Power Cost ($/kW Low) 1535 300 250 1000 1000 817.0
Power Cost ($/kW High) 3003 300 2500 3000 2200.8 O & M Cost (% of initial
capital) 3.0% 2.6% 6.0% 3.9%
Cycle Life 2500 5700 2500 2500 3500 3000 2500 3171.4
Maximum Age (years) 20 15 15 12.5 15.6
Specific Energy
(kWh/kg) 0.1 0.4 0.195 0.195 0.125 0.195 0.202 Specific Power
(kW/kg) 0.16 0.19 0.175 Round Trip Efficiency
(%) 89.0% 80.0% 90.0% 89.0% 84.0% 90.0% 75.0% 87.0% 85.5% Self
Discharge (%/month) 600.00% 600.0%
Response Time (ms) 4 4.0
Table 9.5: Sodium Sulphur Battery Characteristics
9.2.6 Sodium Metal Halide (Zebra)
Source Ibrahim CIGRE DTI Chen Averages
Energy Cost ($/kWh Low) 150 100 125.0
Energy Cost ($/kWh High) 800 200 500.0
Power Cost ($/kW Low) 150 150.0
Power Cost ($/kW High) 300 300.0 O & M Cost (% of initial
capital)
Cycle Life 2500 2500 2500.0
Maximum Age (years) 12 12.0
Specific Energy (kWh/kg) 0.11 0.125 0.11 0.115
Specific Power (kW/kg) 0.02 0.145 0.175 0.113
Round Trip Efficiency (%) 90.0% 90.0%
Self Discharge (%/month) 450.00% 450.0%
Response Time (ms)
Table 9.6: Sodium Nickel Chloride (Zebra) Battery Characteristics

- 228 -
9.2.7 Lithium Ion Source Divya Ibrahim CIGRE DTI EU ESA Chen Averages
Energy Cost ($/kWh Low) 934 780 200 700 600 642.8
Energy Cost ($/kWh High) 1335 1333 334 3000 2500 1700.4
Power Cost ($/kW Low) 1500 1200 1350.0
Power Cost ($/kW High) 3500 4000 3750.0
O & M Cost (% of initial capital)
Cycle Life 3000 5000 4000 5500 4375.0
Maximum Age (years) 10 10.0
Specific Energy (kWh/kg) 0.14 0.15 0.175 0.125 0.125 0.14 0.143
Specific Power (kW/kg) 0.1 0.26 0.23 0.197
Round Trip Efficiency (%) 100.0% 100.0% 95.0% 95.0% 96.0% 97.2%
Self Discharge (%/month) 1.0% 1.0% 6.0% 2.7%
Response Time (ms)
Table 9.7: Lithium Ion Battery Characteristics
9.2.8 Metal Air
Source Divya CIGRE EU ESA Chen Averages
Energy Cost ($/kWh Low) 67 20 10 32.3
Energy Cost ($/kWh High) 268 60 60 129.3
Power Cost ($/kW Low) 950 100 525.0
Power Cost ($/kW High) 2000 250 1125.0 O & M Cost (% of initial
capital)
Cycle Life 125 200 125 200 162.5
Maximum Age (years)
Specific Energy (kWh/kg) 0.55 0.265 0.3 1.6 0.679
Specific Power (kW/kg)
Round Trip Efficiency (%) 50.0% 50.0% 47.0% 49.0%
Self Discharge (%/month) 0.00% 0.0%
Response Time (ms)
Table 9.8: Metal Air Battery Characteristics

- 229 -
9.2.9 Vanadium Redox
Source Divya Dufo-Lopez
Ponce de León CIGRE EPRI DTI EU EPRI 2 ESA Chen Averages
Energy Cost ($/kWh Low) 480 267 500 100 210 150 284.5 Energy Cost
($/kWh High) 1335 1800 410 300 1000 969.0
Power Cost ($/kW Low) 425 1250 600 600 718.8
Power Cost ($/kW High) 700 1708 2300 2500 1500 1741.6 O & M Cost (% of initial
capital) 4.0% 0.5% 0.0
Cycle Life 10000 2700 12000 14000 15000 2500 12000 9742.9 Maximum
Age (years) 15 10 15 10 12.5 Specific Energy
(kWh/kg) 0.04 0.025 0.02 0.02 0.02 0.025 Specific Power
(kW/kg) Round Trip Efficiency
(%) 85.0% 70.0% 72.0% 70.0% 79.0% 85.0% 60.0% 79.0% 0.8 Self
Discharge (%/month) 0.0% 0 0.0 Response Time (ms) 10 10.0
Table 9.9: Vanadium Redox Flow Battery Characteristics
9.2.10 Zinc Bromine
Source Divya Dufo-Lopez DTI EU ESA Chen Averages
Energy Cost ($/kWh Low) 480 254 150 294.7
Energy Cost ($/kWh High) 1335 334 900 1000 892.3
Power Cost ($/kW Low) 600 700 650.0
Power Cost ($/kW High) 2500 2500 2500.0
O & M Cost (% of initial capital) 6.0% 6.0%
Cycle Life 1710 2000 2500 2000 2052.5
Maximum Age (years) 10 8 9.0 Specific Energy
(kWh/kg) 0.07 0.06 0.037 0.02 0.04 0.045
Specific Power (kW/kg) Round Trip Efficiency
(%) 75.0% 77.0% 70.0% 75.0% 79.0% 75.2% Self Discharge
(%/month) 0 0.0%
Response Time (ms)
Table 9.10: Zinc Bromine Flow Battery Characteristics

- 230 -
9.2.11 Polysulphide Bromine
Source Divya Ponce de
León EPRI DTI ESA Chen Averages
Energy Cost ($/kWh Low) 480 65 150 150 211.3
Energy Cost ($/kWh High) 1335 120 1800 1000 1063.8
Power Cost ($/kW Low) 150 600 700 483.3
Power Cost ($/kW High) 300 2500 2500 1766.7 O & M Cost (% of initial
capital) 2.2% 2.2%
Cycle Life 400 400.0
Maximum Age (years) 15 15 12 14.0
Specific Energy (kWh/kg) 0.02 0.0
Specific Power (kW/kg)
Round Trip Efficiency (%) 75.0% 67.0% 62.5%
68.0% 68.1%
Self Discharge (%/month) 0.0% 0 0.0%
Response Time (ms) 100 100.0
Table 9.11: Polysulphide Bromine Flow Battery Characteristics
9.2.12 Superconducting Magnetic Energy Store
Source Ibrahim CIGRE EU Chen Averages
Energy Cost ($/kWh Low) 1000 1000.0
Energy Cost ($/kWh High) 10000 10000.0
Power Cost ($/kW Low) 200 200.0
Power Cost ($/kW High) 467 300 383.5 O & M Cost (% of initial
capital)
Cycle Life 100000 100000.0
Maximum Age (years) 20 20.0
Specific Energy (kWh/kg) 0.0025 0.003
Specific Power (kW/kg) 1.25 1.250
Round Trip Efficiency (%) 95.0% 95.0% 97.0% 95.7%
Self Discharge (%/month) 375.00% 375.0%
Response Time (ms) 100 100.0
Table 9.12: Superconducting Magnetic Energy Store Characteristics
9.2.13 Supercapacitors
Source Ibrahim CIGRE EPRI EU ESA Chen Averages
Energy Cost ($/kWh Low) 6000 300 3150.0
Energy Cost ($/kWh High) 10000 2000 6000.0
Power Cost ($/kW Low) 350 210 267 100 100 205.4
Power Cost ($/kW High) 708 1335 800 300 785.8 O & M Cost (% of initial
capital) 1.5% 1.5%
Cycle Life 100000 300000 30000 100000 132500.0
Maximum Age (years) 10 20 15.0
Specific Energy (kWh/kg) 0.01 0.06 0.015 0.008 0.023
Specific Power (kW/kg) 1.4 2.75 2.075
Round Trip Efficiency (%) 95.0% 93.0% 91.5% 98.0% 94.4%
Self Discharge (%/month) 150.0% 900.00% 525.0%
Response Time (ms) 5 5.0
Table 9.13: Supercapacitor Characteristics

- 231 -
9.2.14 Flywheels
Source Ibrahim EPRI ESA Walawalker Chen Averages
Energy Cost ($/kWh Low) 80 2000 2200 1000 1320.0
Energy Cost ($/kWh High) 231 4000 3000 5000 3057.8
Power Cost ($/kW Low) 189 200 550 250 297.3
Power Cost ($/kW High) 410 600 750 350 527.5
O & M Cost (% of initial capital) 7.5% 3.8% 5.7%
Cycle Life 100000 100000 25000 100000 20000 69000.0
Maximum Age (years) 15 15.0
Specific Energy (kWh/kg) 0.01 0.01 0.02 0.013
Specific Power (kW/kg) 0.95 0.950
Round Trip Efficiency (%) 85.0% 75.0% 94.0% 84.7%
Self Discharge (%/month) 1200.0% 3000.00% 2100.0%
Response Time (ms) 5 5.0
Table 9.14: Flywheel Characteristics
9.2.15 Thermal
Source Chen
Aquifers Chen
Cryogenic
Chen Molten
Salt Averages
Energy Cost ($/kWh Low) 20 3 30 17.7
Energy Cost ($/kWh High) 50 30 60 46.7
Power Cost ($/kW Low) 200 200.0
Power Cost ($/kW High) 300 300.0 O & M Cost (% of initial
capital)
Cycle Life
Maximum Age (years) 15 30 10 18.3
Specific Energy (kWh/kg) 0.1 0.2 0.14 0.1
Specific Power (kW/kg) 0.02 0.0
Round Trip Efficiency (%) 40% 0.4
Self Discharge (%/month) 15.00% 15.00% 0.2
Response Time (ms)
Table 9.15: Thermal Energy Store Characteristics

- 232 -
10 References [1] UK Government. “Climate Change Act 2008.” [Online] Available at:
http://www.legislation.gov.uk/ukpga/2008/27/section/1 [Accessed 26 Jan.
2012].
[2] Department of Energy and Climate Change. “UK Renewable Energy
Roadmap.” [Online] Available at:
http://www.decc.gov.uk/assets/decc/11/meeting-energy-demand/renewable-
energy/2167-uk-renewable-energy-roadmap.pdf [Accessed 26 Jan 2012].
[3] National Grid. “‘Operating the transmission networks in 2020 – Update June
2011.” [Online] Available at:
http://www.nationalgrid.com/NR/rdonlyres/DF928C19-9210-4629-AB78-
BBAA7AD8B89D/47178/Operatingin2020_finalversion0806_final.pdf
[Accessed 01 Feb. 2012].
[4] Energy Research Partnership. “The future role for energy storage in the UK
main report.” [Online] Available at:
http://www.energyresearchpartnership.org.uk/tiki-index.php?page=page12
[Accessed 31 Oct. 2011].
[5] P. W. Carlin, A. S. Laxson, E. B. Muljadi. “The History and State of the Art of
Variable-Speed Wind Turbine Technology.” Wind Energy, vol. 6, no. 2, pp.
129-159, Apr. 2003.
[6] Global Wind Energy Council (GWEC). Apr. 2011. “Global Wind Report
2010” [Online] Available at: http://www.gwec.net/index.php?id=180
[Accessed Sept. 13 2011].
[7] Commission of the European Communities. Jan. 2008. “20 20 by 2020:
Europe’s Climate Change Opportunity”, [Online] Available at:
http://www.energy.eu/directives/com2008_0030en01.pdf [Accessed Sept. 22
2011].
[8] Department of Energy and Climate Change. 2011. “UK Energy Sector
Indicators 2011”, [Online] Available at:
http://www.decc.gov.uk/assets/decc/11/stats/publications/indicators/3327-uk-
energy-sector-indicators-2011.pdf [Accessed Oct. 31 2011]

- 233 -
[9] Department for Business, Enterprise and Regulatory Reform. Apr. 2008.
“Atlas of UK Marine Renewable Energy Resources.” [Online] Available at:
http://www.renewables-
atlas.info/downloads/documents/Renewable_Atlas_Pages_A4_April08.pdf
[Accessed Oct. 31 2011]
[10] D. Toke. “The UK offshore wind power programme: A sea-change in UK
energy policy?”, Energy Policy, vol. 39, no. 2, pp526-534, Feb. 2011.
[11] Pöyry. Jul. 2009. “Impact of Intermittency: How wind variability could change
the shape of the British and Irish electricity market.” [Online] Available at:
http://www.poyry.com/linked/group/study [Accessed Mar. 4 2011]
[12] A. D. Hansen, L. Hansen. “Wind Turbine Concept Market Penetration over 10
years (1995-2004).” Wind Energy, vol. 10, no. 1, pp. 81-97, Jan. 2007.
[13] S. Soter, R. Wegener. "Development of Induction Machines in Wind Power
Technology." In IEEE Electric Machines & Drives Conf., Antalya, Turkey,
2007, vol.2, pp.1490-1495.
[14] E. Muljadi, N. Samaan, V. Gevorgian, L. Jun, S. Pasupulati. "Short circuit
current contribution for different wind turbine generator types." In IEEE
Power and Energy Soc. General Meeting, Minneapolis, MN, U.S.A., 2010,
doi: 10.1109/PES.2010.5589677.
[15] A. D. Hansen, G. Michalke. “Fault ride-through capability of DFIG wind
turbines.” Renewable Energy, vol. 32, no. 9, pp. 1594-1610, Jul. 2007.
[16] Z. Chen, J. M. Guerrero, F. Blaabjerg. “A Review of the State of the Art of
Power Electronics for Wind Turbines.” IEEE Trans. Power Electron, vol. 24,
no. 8, pp. 1859-1875, Aug. 2009.
[17] C. Jauch. “Transient and Dynamic Control of a Variable Speed Wind Turbine
with Synchronous Generator.” Wind Energy, vol. 10, no. 3, pp247-269, May
2007.
[18] R. Peña, R. Cardenas, R. Blasco, G. Asher, J. Clare. "A cage induction
generator using back to back PWM converters for variable speed grid
connected wind energy system." In Ind. Electron. Soc. Ann. Conf., IECON '01,
Denver, CO, U.S.A., 2001, vol.2, pp.1376-1381.

- 234 -
[19] M. Molinas, B. Naess, W. Gullvik, T. Undeland. “Cage induction generators
for wind turbines with power electronics converters in the light of the new grid
codes”, Presented at the European Conf. Power Electron. and Applicat.,
Dresden, Germany, 2005.
[20] V. Akhmatov. “Modelling and ride-through capability of variable speed wind
turbines with permanent magnet generators.” Wind Energy, vol. 9, no. 4,
pp.313–326, Jul. 2006.
[21] C. Lewis, J. Muller. "A Direct Drive Wind Turbine HTS Generator." In IEEE
Power and Energy Soc. General Meeting, Tampa, FL, U.S.A., 2007, doi:
10.1109/PES.2007.386069.
[22] S. Loddick. "Active stator, a new generator topology for direct drive
permanent magnet generators," Presented at the 9th IET Int. Conf. on AC and
DC Power Transmission, ACDC, London, UK, 2010.
[23] P. Djapic, G. Strbac. “Grid Integration Options for Offshore Wind Farms.”
Department for Trade and Industry (DTI). URN 06/2133. Dec. 2006.
[24] A. B. Morton, S. Cowdroy, J. R. A. Hill, M. Halliday, G. D. Nicholson. "AC or
DC? economics of grid connection design for offshore wind farms." Presented
at the 8th IEE Int. Conf. on AC and DC Power Transmission, ACDC, London,
UK, 2006.
[25] C. Zhan, C. Smith, A. Crane, A. Bullock, D. Grieve. "DC transmission and
distribution system for a large offshore wind farm," Presented at the 9th IET
Int. Conf. on AC and DC Power Transmission, ACDC, London, UK, 2010.
[26] Offshore Grid. Oct. 2011. “Offshore Grid Direct Design Map.” [Online]
Available at: http://www.offshoregrid.eu/ [Accessed Nov. 3 2011].
[27] J. Morren, J. Pierik, S. W. H. de Haan. “Inertial Response of Variable Speed
Wind Turbines.” Electric Power Syst. Research, vol. 76, no.11, pp980-987,
Jul. 2006.
[28] Renewable Energy Foundation. Jun. 2011. “Scottish Wind Power Constraint
Payments Update.” [Online] Available at:
http://www.ref.org.uk/publications/239-scottish-wind-power-constraint-
payments-update [Accessed Oct. 31 2011].

- 235 -
[29] National Grid. 2009. “Report of the National Grid Investigation into the
Frequency Deviation and Automatic Demand Disconnection that occurred on
27th May 2008”, [Online] Available at:
http://www.nationalgrid.com/NR/rdonlyres/E19B4740-C056-4795-A567-
91725ECF799B/32165/PublicFrequencyDeviationReport.pdf [Accessed Mar.
24 2010]
[30] National Grid. Jan. 2010. “Working Group Report: Small Embedded
Generation Working Group Report.” [Online] Available at:
http://www.nationalgrid.com/NR/rdonlyres/AAD8BBAB-82E3-4C02-9D35-
D2575331609F/39699/pp10_01Workinggroupreportv1018Jan2010.pdf
[Accessed Oct. 31 2011].
[31] National Grid. Aug. 2011. “Summary of Latest Simulation Results.” [Online]
Available at: https://www.nationalgrid.com/NR/rdonlyres/D06C6209-24B4-
4BA4-84F5-551FA87B2FA6/49693/SimResultsAugust2011.pdf [Accessed
Oct. 31 2011]
[32] P. M. Ashton, G. A. Taylor, M. R. Irving, A. M. Carter, M. E. Bradley.
“Prospective Wide Area Monitoring of the Great Britain Transmission System
using Phasor Measurement Units.” Accepted for the IEEE Power and Energy
Soc. General Meeting, San Diego, CA, U.S.A., July 2012.
[33] National Grid. “Future Balancing Services Requirements: Response.” [Online]
Available at: http://www.nationalgrid.com/NR/rdonlyres/0F82BB0B-98E9-
4B02-A514-3C87A85E60D8/42696/Future_Balancing_Services_Requirement
s_Response1.pdf [Accessed 17 Jun. 2010]
[34] R. Walawalkar, J. Apt, R. Mancini. “Economics of electric energy storage for
energy arbitrage and regulation in New York.”, Energy Policy, vol. 35, no. 4,
pp. 2558-2568, Apr. 2007.
[35] C. Vartanian, N. Bentley. "A123 systems' advanced battery energy storage for
renewable integration." In IEEE Power Syst. Conf. and Exposition (PSCE),
Phoenix, Az, U.S.A., 2011, doi: 10.1109/PSCE.2011.5772569.
[36] A. Oudalov, D. Chartouni, C. Ohler. "Optimizing a Battery Energy Storage
System for Primary Frequency Control." IEEE Trans. on Power Syst., vol.22,
no.3, pp.1259-1266, Aug. 2007.

- 236 -
[37] T. Hals, R. Hampton. “Beacon Power bankrupt, had U.S. backing like
Solyndra.” Oct. 31 2011, Reuters, [Online] Available at:
http://www.reuters.com/article/2011/10/31/us-beaconpower-bankruptcy-
idUSTRE79T39320111031 [Accessed 28 Nov. 2011]
[38] National Grid. “Initial Consultation: Operating the Electricity Transmission
Networks in 2020.” [Online] Available at:
http://www.nationalgrid.com/uk/Electricity/Operating+in+2020 [Accessed 19
Jun. 2009]
[39] J. Eyer, G. Corey. “Energy Storage for the Electricity Grid: Benefits and
Market Potential Assessment Guide.” Sandia National Laboratories,
SAND2010-0815, Feb. 2010.
[40] J. G. Slootweg, S. W. H. de Haan, H. Polinder, W. L. Kling. “General model
for representing variable speed wind turbines in power system dynamics
simulations.” IEEE Trans. on Power Syst., vol.18, no.1, pp. 144-151, Feb.
2003.
[41] T. Burton, D. Sharpe, N. Jenkins, E. Bossanyi. Wind Energy Handbook.
Chichester, UK: Wiley, 2001, pp. 45.
[42] P. Sørensen, N. A. Cutululis, A. Vigueras-Rodríguez, L. E. Jensen, J. Hjerrild,
M. H. Donovan, H. Madsen. “Power Fluctuations From Large Wind Farms”,
IEEE Trans. on Power Syst., vol. 22, no. 3, pp. 958-965, Aug. 2007.
[43] P. Sorensen, A. D. Hansen, P. A. Carvalho Rosas. “Wind models for
simulation of power fluctuations from wind farms.” J. of Wind Eng. and Ind.
Aerodynamics, vol. 90, no. 12-15, pp. 1381-1402, Dec. 2002.
[44] Wind Turbines: Design Requirements, BS EN 61400-1, British Standards
Institute, 2005.
[45] G. Marsaglia, W. W. Tsang. “The Ziggurat Method for Generating Random
Variables”, [Online] Available at: http://www.jstatsoft.org/v05/i08/paper
[Accessed Apr. 21 2010].
[46] A. D. Diop, E. Ceanga, J-L. Rétiveau, J-F. Méthot, A. Ilinca, A. “Real-time
three dimensional wind simulation for windmill rig tests”, Renewable Energy,
vol. 32, no. 13, pp2268-2290.

- 237 -
[47] S. Heier, Grid Integration of Wind Energy Conversion Systems. 2nd Ed,
Chichester, UK: Wiley, 2006, pp. 44.
[48] G. Ramtharan, N. Jenkins, O. Anaya-Lara, E. Bossanyi. “Influence of rotor
structural dynamics representations on the electrical transient performance of
FSIG and DFIG wind turbines.” Wind Energy, vol. 10, no. 4, pp. 293-301, Jul.
2007.
[49] S. M. Muyeen, Md. Hasan Ali, R. Takahashi, T. Murata, J. Tamura, Y.
Tomaki, A. Sakahara, E. Sasano. “Comparative study on transient stability
analysis of wind turbine generator system using different drive train models”,
IET Renewable Power Generation, vol. 1. no. 2, pp. 131-141, Jun. 2007.
[50] A. D. Hansen, G. Michalke. “Modelling and Control of Variable Speed Multi-
pole Permanent Magnet Synchronous Generator Wind Turbine.” Wind Energy,
vol. 11, no. 5, pp. 537-554, Sept. 2008.
[51] V. Akhmatov. “Analysis of dynamic behavior of electric power systems with
large amount of wind power”. PhD Thesis, Ørsted DTU, Denmark, 2003, pp.
115.
[52] B. Adkins, R. G. Harley. The General Theory of Alternating Current
Machines. London, UK: Chapman and Hall Ltd., 1975, pp61-65.
[53] B. K. Bose. Modern Power Electronics and AC Drives, Upper Saddle River,
New Jersey, USA: Prentice Hall PTR, 2002, pp.357-380.
[54] A. Troedson, “PM Generator and Full Power Converter – The New Drive
Train Standard.” [Online] Available at:
http://www.ngusummitapac.com/media/whitepapers/The_Switch_NGUAPAC.
pdf [Accessed Oct. 04 2011].
[55] G. Michalke, A. D. Hansen, T. Hartkopf. “Control strategy of a variable speed
wind turbine with multipole permanent magnet synchronous generator.” In
European Wind Energy Conf., EWEC '07, 2007. [Online] Available at:
http://www.ewec2007proceedings.info/ [Accessed Mar. 17 2009].
[56] H. Li, Z. Chen. “Design optimization and site matching of direct-drive
permanent magnet wind power generator systems.” Renewable Energy, vol.
34, no. 4, pp. 1175-1184, Apr. 2009.

- 238 -
[57] Converteam. “MV3000 Full Power Wind Converters Low Voltage.”, [Online]
Available at: www.converteam.com [Accessed Oct. 31 2011].
[58] R. C. Portillo, M. M. Prats, J. I. Leon, J. A. Sanchez, J. M. Carrasco, E.
Galvan, L. G. Franquelo. “Modelling Strategy for Back-to-Back Three-Level
Converters Applied to High-Power Wind Turbines.” IEEE Trans. on Ind.
Electron., vol.53, no.5, pp.1483-1491, Oct. 2006.
[59] A. D. Hansen, G. Michalke. "Multi-pole permanent magnet synchronous
generator wind turbines' grid support capability in uninterrupted operation
during grid faults." IET Renewable Power Generation, vol.3, no.3, pp.333-
348, Sept. 2009
[60] J-K. Seok; J-K. Lee; D-C. Lee. "Sensorless speed control of nonsalient
permanent-magnet synchronous motor using rotor-position-tracking PI
controller." IEEE Trans. on Ind. Electron., vol.53, no.2, pp. 399- 405, Apr.
2006.
[61] R. D. Richardson, W. L. Erdman. “Variable Speed Wind Turbine.” U.S. Patent
5,083,039, Jan. 21 1992.
[62] R. Jones, P. Brogan, E. Grøndahl, H. Stiesdal. “Power Converters.” G.B.
Patent 2432267, Nov. 13 2006.
[63] H. Camblong, I. Martinez de Alegria, M. Rodriguez, G. Abad. “Experimental
evaluation of wind turbines maximum power point tracking controllers.”
Energy Conversion and Manage., vol. 47, no. 18-19, pp. 2846-2858, Nov.
2006.
[64] W. E. Leithead, B. Connor. “Control of variable speed wind turbines: Design
task.” Int. J. of Control, vol. 73, no. 13, pp. 1189-1212, Nov. 2000.
[65] T. Burton, D. Sharpe, N. Jenkins, E. Bossanyi. Wind Energy Handbook.
Chichester, UK: Wiley, 2001, pp. 471-483.
[66] S. M. Muyeen, M. H. Ali, R. Takahashi, T. Murata, J. Tamura. “Damping of
Blade-shaft torsional oscillations of wind turbine generator system.” Electric
Power Components and Syst., vol. 36, no. 2, pp195-211, 2008.

- 239 -
[67] E. Muljadi, C. P. Butterfield. "Pitch-controlled variable-speed wind turbine
generation." IEEE Trans. on Ind. Applica., vol. 37, no.1, pp.240-246, Jan/Feb
2001.
[68] E. A. Bossanyi. “Further load reductions with individual pitch control.” Wind
Energy, vol. 8, no. 4, pp.481–485, Oct. 2005.
[69] P. Christiansen. “A Sea of Turbines.”, Power Engineer, vol. 17, pp.22-24, Feb.
2003.
[70] T. Gjengedal. “Large-scale wind power farms as power plants.” Wind Energy,
vol. 8, no. 3, pp. 361-373, Jul. 2005.
[71] D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Grid
Connection Oriented Modelling of Wind Turbines with Full Converters.” In
44th Universities Power Eng. Conf., CD-ROM, 2009.
[72] F. Iov, A. D. Hansen, P. Sorensen, F. Blaabjerg. 2004. “Wind Turbine
Blockset in Matlab/Simulink - General Overview and Description of the
Models.” [Online] Formerly Available at:
http://www.iet.aau.dk/Research/research_prog/wind_turbine/
Projects/SimPlatformPrj/ [Accessed 8 July 2008].
[73] A. D. Hansen, C. Jauch, P. Sorensen, F. Iov, F. Blaabjerg. Dec. 2003.
“Dynamic Wind Turbine Models in Power System Simulation Tool
DIgSILENT.” [Online] Available at:
http://www.digsilent.es/Software/Application_Examples/ris-r-1400.pdf
[Accessed 12 Jun 2009].
[74] F. Martin, I. Purellku, T. Gehlhaar. “Modelling of and Simulation with Grid
Code validated Wind Turbine Models.” In 8th
Int. Workshop on Large Scale
Integration of Wind Power into Power Syst., Bremen, Germany, 2009, USB.
[75] J. N. Nielsen, V. Akhmatov, J. Thisted, E. Grondahl, P. Egedal, M. N.
Frydensbjerg, K. H. Jensen. “Modelling and Fault-Ride-Trough Tests of
Siemens Wind Power 3.6 MW Variable-speed Wind Turbines.” Wind Eng.,
vol. 31, no. 6, pp. 441-452, December 2007.
[76] H. Urdal, J. Horne. “2GW of wind and rising fast – Grid Code compliance of
large wind farms in the Great Britain transmission system.” Presented at the
Nordic Wind Power Conf., NWPC’2007, Roskilde, Denmark, 2007.

- 240 -
[77] J. C. Ausin, D. N. Gevers, B. Andresen. “Fault Ride-through Capability Test
Unit for Wind Turbines.” Wind Energy, vol. 11, no. 1, pp3-12, January 2008.
[78] National Grid. Sept. 2008. “Guidance Notes for Power Park Developers.” No.
2, [Online] Available at:
http://www.nationalgrid.com/uk/Electricity/Codes/gridcode/associateddocs/
[Accessed 10 October 2008]
[79] Eon Netz. 2006. “Grid Code – High and Extra-high Voltage.” pp. 18-19
[Online] Available at:
http://www.pvupscale.org/IMG/pdf/D4_2_DE_annex_A-
3_EON_HV_grid__connection_requirements_ENENARHS2006de.pdf
[Accessed 10 October 2008]
[80] D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Meeting
Modern Grid Codes with Large Direct-Drive Permanent Magnet Generators:
Low Voltage Ride-through.” Wind Energy, in press.
[81] D. D. Banham-Hall, C. A. Smith, G. A. Taylor. “Generator torque control
methods.” European Patent Application no. EP10006961.1 filed 6 Jul. 2010.
[82] L. M. Fernandez, C. A. Garcia, F. Jurado. “Operating capability as a PQ/PV
node of a direct-drive wind turbine based on a permanent magnet synchronous
generator.” Renewable Energy, vol. 35, no. 5, pp.1308-1318, Jun. 2010.
[83] D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Towards Large-
scale Direct Drive Wind Turbines with Permanent Magnet Generators and Full
Converters.”, In IEEE Power and Energy Soc. General Meeting, Minneaspolis,
MN, U.S.A., 2010, doi: 10.1109/PES.2010.5589780.
[84] J. Conroy, R. Watson. “Low voltage ride-through of a full converter wind
turbine with permanent magnet generator.” IET Renewable Power Generation,
vol. 1, no. 3, pp. 182-189, Sept. 2007.
[85] G. Michalke, A. D. Hansen. “Modelling and control of variable speed wind
turbines for power system studies.” Wind Energy, vol. 13, no. 4, pp.307-322,
May 2010.
[86] J. Conroy, R. Watson. “Aggregate modelling of wind farms containing full-
converter wind turbine generators with permanent magnet synchronous

- 241 -
machines: transient stability studies.”, IET Renewable Power Generation,
vol.3, no.1, pp.39-52, Mar. 2009.
[87] D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Meeting
Modern Grid Codes with Large Direct-Drive Permanent Magnet Generators:
Frequency Response and Inertia.” Wind Energy, awaiting revisions.
[88] C. Bjerge, J. R. Kristoffersen. “How to run an offshore wind farm like a
conventional power plant.” Modern Power Syst., vol. 27, no. 1, pp31-33, Jan.
2007.
[89] E. Malnick, R. Mendick. “Wind farm paid £1.2 million to produce no
electricity.” The Telegraph (Sept. 17 2011), Earth Section.
[90] J. Horne. “Wind Farms can provide Frequency Response – Experience of the
Great Britain Transmission System Operator.”, In 7th
Int. Workshop on Large
Scale Integration of Wind Power into Power Syst., Madrid, Spain, 2008, USB.
[91] L. Holdsworth, J. B. Ekanayake, N. Jenkins. “Power System Frequency
Response from Fixed Speed and Doubly Fed Induction Generator based Wind
Turbines.” Wind Energy, vol. 7, no. 1, pp. 21-35, Jan. 2004.
[92] J. B. Ekanayake, N. Jenkins, G. Strbac. “Frequency Response from Wind
Turbines.” Wind Eng., vol. 32, no. 6, pp573-586, Dec. 2008.
[93] R. W. Delmerico, N. W. Miller. “System and Method for Utility and Wind
Turbine Control.” U. S. Patent 7,345,373, Mar. 18 2008.
[94] J. Conroy, R. Watson. “Frequency Response Capability of Full Converter
Wind Turbine Generators in Comparison to Conventional Generation”, IEEE
Trans. on Power Syst., vol. 23, no. 2, pp649-656, May 2008.
[95] G. C. Tarnowski, P. C. Kjaer, P. E. Sorensen, J. Ostergaard. "Variable speed
wind turbines capability for temporary over-production." In IEEE Power and
Energy Soc. General Meeting, Calgary, AB, Canada, 2009, doi:
10.1109/PES.2009.5275387.
[96] D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Grid
Connection Oriented Modelling of Wind Farms to Support Power Grid
Stability”, In 21st Int. Conf. on Syst. Eng., Coventry, U.K., 2010, CD-ROM.

- 242 -
[97] A. Teninge, C. Jecu, D. Roye, S. Bacha, J. Duval, R. Belhomme. “Contribution
to frequency control through wind turbine inertial energy storage.” IET
Renewable Power Generation, vol.3, no.3, pp.358-370, Sept. 2009.
[98] H. Urdal, Private Communication, Dec. 17 2010.
[99] Hydro-Quebec. “Transmission Provider Technical Requirements for the
Connection of Power Plants to the Hydro-Quebec Transmission System.” Feb.
2006.
[100] National Grid. Dec. 20 2010. “Frequency Response Working Group Minutes.”
[Online] Available at: http://www.nationalgrid.com/NR/rdonlyres/E71D0100-
4FD7-4056-896C-0A72FB480D94/49130/Meeting15Minutes.pdf [Accessed 4
Jan. 2011].
[101] European Network of Transmission System Operators for Electricity [ENTSO-
E], Mar. 22 2011, “ENTSO-E Draft Requirements for Grid Connection
Applicable to all Generators.” [Online] Available at:
https://www.entsoe.eu/fileadmin/user_upload/_library/news/110322_Pilot_Net
work_Code_Connections.pdf [Accessed 12 June 2011]
[102] J. Morren, S. W. H. de Haan, W. L. Kling, J. A. Ferreira. “Wind Turbines
Emulating Inertia and Supporting Primary Frequency Control.” IEEE Trans.
on Power Syst., vol. 21, no. 1, pp. 433-434, Feb. 2006.
[103] J. Morren, J. Pierik, S. W. H. de Haan “Inertial response of variable speed
wind turbines.” Electric Power Syst. Research, vol. 76, no. 11, pp. 980-987,
Jul. 2006.
[104] E. V. Larsen, R. W. Delmerico. “Battery Energy Storage Power Conditioning
System.” U. S. Patent 5,798,633, Aug. 25 1998.
[105] S. Wachtel, A. Beekmann. “Contribution of Wind Energy Converters with
Inertial Emulation to Frequency Control and Frequency Stability in Power
Systems.” In 8th Int. Workshop on Large Scale Integration of Wind Power into
Power Syst., Bremen, Germany, 2009, USB.
[106] G. C. Tarnowski, P. Carne Kjær, P. E. Sørenson, J. Østergaard. “Study on
Variable Speed Wind Turbines Capability for Frequency Response.” In Proc.
of the European Wind Energy Conf., EWEC 2009. [Online] Available at:

- 243 -
http://www.ewec2009proceedings.info/allfiles2/636_EWEC2009presentation.p
df [Accessed 23 Nov. 2009]
[107] H. Chen, T. N. Cong, W. Yang, C. Tan, Y. Li, Y. Ding. “Progress in electrical
energy storage system: A critical review.” Progress in Natural Sci., vol. 19,
no. 3, pp. 291-312, Mar. 2009.
[108] H. Ibrahim, A. Ilinca, J. Perron. “Energy Storage Systems – Characteristics and
comparisons.” Renewable and Sustainable Energy Reviews, vol. 12, no. 5, pp.
1221-1250, Jun. 2008.
[109] Department of Trade and Industry. “Review of electrical energy storage
technologies and systems and of their potential for the UK.”
DG/DTI/00055/00/00, Jul. 2004.
[110] Electric Power Research Institute. “Comparison of Storage Technologies for
Distributed Resource Applications.” 1007301, Feb. 2003.
[111] International Council on Large Electric Systems. “Electric Energy Storage
Systems.” Working Group C6.15, Apr. 2011.
[112] European Parliament’s committee on Industry, Research and Energy. “Outlook
of Energy Storage Technologies.” IP/A/ITRE/FWC/2006-087/Lot 4/C1/SC2,
Feb. 2008.
[113] Electricity Storage Association. 2008. [Online] Available at:
http://www.electricitystorage.org/about/welcome [Accessed 01 Dec. 2011].
[114] J. P. Deane, B. P. Ó Gallachóir, E. J. McKeogh. “Techno-economic review of
existing and new pumped hydro energy storage plant.” Renewable and
Sustainable Energy Reviews, vol. 14, no. 4, pp. 1293-1302, May 2010.
[115] S. J. Kazempour, M. P. Moghaddam, M. R. Haghifam, G. R. Yousefi. “Electric
energy storage systems in a market-based economy: Comparison of emerging
and traditional technologies.” Renewable Energy, vol. 34, no. 12, pp. 2630-
2639, Dec. 2009.
[116] K. C. Divya, J. Østergaard. “Battery energy storage technology for power
systems – An overview.” Electric Power Syst. Research, vol. 79, no. 4, Apr.
2009.

- 244 -
[117] R. Dufo-López, J. L. Bernal-Agustín, J. A. Domínguez-Navarro. “Generation
management using batteries in wind farms: Economical and technical analysis
for Spain.” Energy Policy, vol. 37, no. 1, pp. 126-139, Jan. 2009.
[118] J. Himelic, F. Novachek. “Sodium Sulphur Battery Energy Storage And Its
Potential To Enable Further Integration of Wind.” Xcel Energy Contract #
RD3-12, Jul. 2010.
[119] P. Lang, N. Wade, P. Taylor, P. Jones, T. Larsson. “Early Findings of an
energy storage practical demonstration”, Presented at the 21st Int. Conf. on
Electricity Distribution, Frankfurt, Germany, 2011.
[120] C. Ponce de León, A. Frías-Ferrer, J. González-García, D. A. Szánto, F. C.
Walsh. “Redox flow cells for energy conversion.” J. of Power Sources, vol.
160, no. 1, pp. 716-732, Sep. 2006.
[121] Department of Trade and Industry. “Regenesys Utility Scale Energy Storage.”
URN 04/1048, 2004.
[122] Isentropic. “The advantages of our system.” [Online] Available at:
http://www.isentropic.co.uk/ [Accessed 01 Dec. 2011]
[123] M. L. Lazarewicz, T. M. Ryan. “Integration of Flywheel-Based Energy
Storage for Frequency Regulation in Deregulated Markets.” In IEEE Power
and Energy Society General Meeting, Minneapolis, MN, U.S.A., 2010, doi:
10.1109/PES.2010.5589748.
[124] S. M. Muyeen, R. Takahashi, T. Murata, J. Tamura. “A New Control Method
of Energy Capacitor System in DC-Based Wind Farm.” In IEEE Energy
Conversion Congr. and Exposition (ECCE), San Jose, CA, U.S.A., pp. 1619-
1625.
[125] Parsons Brinckerhoff, 2006, “Powering the Nation: A review of the costs of
generating electricity”, [Online] Available at:
http://www.pbworld.co.uk/index.php?doc=528 [Accessed 30 June 2008]
[126] Parsons Brinckerhoff, 2010, “Powering the Nation Update 2010”, [Online]
Available at:
http://www.pbworld.com/pdfs/regional/uk_europe/pb_ptn_update2010.pdf
[Accessed 30 November 2010]

- 245 -
[127] M. Skyllas-Kazacos, M. Rychcik, R. G. Robins, A. G. Fane, M. A. Green.
“New All-Vanadium Redox Flow Cell.” J. of the Electrochemical Soc., vol.
133, no. 5, pp.1057-1058, May 1986.
[128] G. Kear, A. A. Shah, F. C. Walsh. “Development of the all-vanadium redox
flow battery for energy storage: a review of technological, financial and policy
aspects.” Int. J. of Energy Research, In press.
[129] Tapbury Management Ltd. “VRB ESSTM Energy Storage & the development
of dispatchable wind turbine output.” [Online] Available at:
http://www.seai.ie/Publications/Renewables_Publications/VRB-ESS-Energy-
Storage-Rpt-Final.pdf [Accessed 06 Dec. 2011].
[130] S. Gray, H. Sharman. “Report on the commissioning of Prudent Energy’s 500
kW, 2000 kWh battery and recent projects.” Presented at the Int. Flow Battery
Forum, Edinburgh, Scotland, 2011.
[131] M. Skyllas-Kazacos, G. Kazacos, G. Poon, H. Verseema. “Recent advances
with UNSW vanadium-based redox flow batteries.” Int. J. of Energy Research,
vol. 34, no.2, pp.182–189, Feb. 2010.
[132] A. A. Shah, M. J. Watt-Smith, F. C. Walsh. “A dynamic performance model
for redox-flow batteries involving soluable species.” Electrochemica Acta, vol.
53, no. 27, pp. 8087-8100, Nov. 2008.
[133] D. You, H. Zhang, J. Chen. “A simple model for the vanadium redox battery.”
Electrochemica Acta, vol. 54, no. 27, pp. 6827-6836, Nov. 2009.
[134] C. Blanc. “Modelling of a Vanadium Redox Flow Battery Electricity Storage
System”, PhD Thesis, École Polytechnique Fédérale do Lausanne,
Switzerland, 2009.
[135] A. Arulampalam, M. Barnes, N. Jenkins, J. B. Ekanayake. “Power quality and
stability improvement of a wind farm using STATCOM supported with hybrid
battery energy storage.”, In IEE Generation, Transmission and Distribution,
vol. 153, no. 6, pp.701-710, Nov. 2006.
[136] C. A. Smith, N. Hayward, E. A. Lewis. “Use of Statcom for offshore wind
farm stability and grid compliance.” Presented at the European Offshore Wind
Conf., Stockholm, Sweden, 2009.

- 246 -
[137] H. Bindner, C. Ekman, O. Gehrke, F. Isleifsson. “Characterisation of
Vanadium Flow Battery.” Risø-R-Report 1753, [Online] Available at:
http://130.226.56.153/rispubl/reports/ris-r-1753.pdf [Accessed 05 Jan. 2011].
[138] D. D. Banham-Hall, C. A. Smith, G. A. Taylor, M. R. Irving. “Flow Batteries
for Enhancing Wind Power Integration.” Accepted for publication in IEEE
Trans. on Power Syst.
[139] W. Wang, B. Ge, D. Bi, D. Sun. “Grid-Connected Wind Farm Power Control
using VRB-based Energy Storage System.” In IEEE Energy Conversion
Congr. and Exposition (ECCE), Atlanta, GA, U.S.A., 2010, pp. 3772-3777.
[140] D. Newbery. “Contracting for Wind Generation.” University of Cambridge
Electricity Policy Research Group Working Paper, [Online] Available at:
http://www.econ.cam.ac.uk/dae/repec/cam/pdf/cwpe1143.pdf [Accessed 06
Jan 2012].
[141] H. Bludszuweit, J. A. Dominguez-Navarro, A.Llombart. "Statistical Analysis
of Wind Power Forecast Error." IEEE Trans. On Power Syst., vol.23, no.3,
pp.983-991, Aug. 2008.
[142] K. Yoshimoto, T. Nanahara, G. Koshimizu. "New Control Method for
Regulating State-of- Charge of a Battery in Hybrid Wind Power/Battery
Energy Storage System." In IEEE PES Power Syst. Conf. and Exposition,
PSCE, Atlanta, GA, U.S.A., 2006, pp.1244-1251.
[143] T. K. A. Brekken, A. Yokochi, A. von Jouanne, Z. Z. Yen, H. M. Hapke, D. A.
Halamay. “Optimal Energy Storage Sizing and Control for Wind Power
Applications.” IEEE Trans. on Sustainable Energy, vol. 2, no. 1, pp. 69-77,
Jan. 2011.
[144] National Grid, 2006, “British Electricity Trading and Transmission
Arrangements – 2006 7 year statement”, [Online] Available at:
http://www.nationalgrid.com/uk/sys_06/default.asp?action=mnch10_2.htm&s
Node=1&Exp=N [Accessed 12 Feb. 2011].
[145] G. L. Susteras, G. Hathaway, J. Caplin, G. Taylor. “Experiences of the
Electricity System Operator Incentives Scheme in Great Britain”, In Int.
Congr. on Electricity Distribution, CIDEL, Buenos Aires, Argentina, 2010.

- 247 -
[146] H. Bludszuweit, J. A. Dominguez-Navarro. "A Probabilistic Method for
Energy Storage Sizing Based on Wind Power Forecast Uncertainty." IEEE
Trans. on Power Syst., vol.26, no.3, pp.1651-1658, Aug. 2011.
[147] M. Korpaas, A. T. Holen, R. Hildrum. “Operation and sizing of energy storage
for wind power plants in a market system.” Int. J. of Elect. Power & Energy
Syst., vol. 25, no. 8, pp. 599-606, Oct. 2003.
[148] J. Aston. “Financial Management.” Brunel University, Uxbridge, Nov. 2011,
Lecture.
[149] J. Cox (Pöyry Consulting). “Impact of Intermittency: How wind variability
could change the shape of the British and Irish electricity markets.” Jul. 2009.
[150] DECC. “Electricity Market Reform – Capacity Mechanism.” [Online]
Available at: http://www.decc.gov.uk/assets/decc/11/consultation/cap-
mech/3883-capacity-mechanism-consultation-impact-assessment.pdf
[Accessed 16 Jan. 2012].
[151] J. Collins, J. Parkes, A. Tindal. “Forecasting for utility-scale wind farms – The
power model challenge.” In 2009 CIGRE/IEEE PES Joint Symp. on
Integration of Wide-Scale Renewable Resources Into the Power Delivery Syst.,
Calgary, AB, Canada, CD-ROM.
[152] OFGEM, 2009, "Project Discovery; Energy Market Scenarios", pp7-8.
[153] G. N. Bathurst, G. Strbac. “Value of combining energy storage and wind in
short-term energy and balancing markets.” Electric Power Syst. Research, vol.
67, no. 1, pp. 1-8, Oct. 2003.
[154] National Grid. “Firm Frequency Response Market Information.” [Online]
Available at: www.nationalgrid.com/uk/Electricity/Balancing/services/freque
ncyresponse/ffr/ [Accessed 30 Apr. 2011].
[155] National Grid. “Mandatory Frequency Response: Frequency Response
Reports.” [Online] Available at:
http://www.nationalgrid.com/uk/Electricity/Balancing/services/frequencyrespo
nse/mandatoryfreqresp/ [Accessed 20 Apr. 2011].

- 248 -
[156] E. A. Lewis, H. Sharman. “Implementation of high capacity energy storage
systems using high power inverters and advanced flow cells.” Presented at
Energy Storage Solutions, London, UK, 2009.
[157] G. Kear, A. A. Shah, F. C. Walsh. “Development of the all-vanadium redox
flow battery for energy storage: a review of technological, financial and policy
aspects.” Int. J. of Energy Research, In press.
[158] Oak Ridge National Laboratory. “Economic Analysis of Deploying Used
Batteries in Power Systems.” [Online] Available at:
http://www.ms.ornl.gov/Physical/pdf/Publication%2030540.pdf [Accessed 16
Jan. 2012].
[159] Oxera. “Discount rates for low carbon and renewable generation technologies.”
[Online] Available at:
http://hmccc.s3.amazonaws.com/Renewables%20Review/Oxera%20low%20ca
rbon%20discount%20rates%20180411.pdf [Accessed 16 Jan 2012]
[160] Ricardo, National Grid. “Bucks for Balancing: Can plug-in vehicles of the
future extract cash – and carbon – from the power grid?” [Online] Available at:
www.ricardo.com/Documents/Downloads/White%20Paper/Plug%20In%20Ve
hicle%20of%20Future/Bucks%20for%20balancing%20-%20can%20plug-
in%20vehicles%20of%20the%20future%20extract%20cash%20%E2%80%93
%20and%20carbon%20%E2%80%93%20from%20the%20power%20grid.pdf
[Accessed 23 Aug 2011].
[161] J. Short. “Dynamic Demand Control: What is its financial value?” [Online]
Available at: http://www.dynamicdemand.co.uk/pdf_economic_case.pdf
[Accessed 8 Mar 2011].
[162] D. D. Banham-Hall, C. A. Smith, G. A. Taylor. Frequency reserves from an
Energy store and a generator. European Patent Application no. EP10007692.4
filed 26/09/2011.
[163] G. Sinden. “Characteristics of the UK wind resource: Long-term patterns and
relationship to electricity demand.” Energy Policy, vol. 35, pp.112-127, Jan.
2007.

- 249 -
[164] R. Pearmine. “Review of Primary Frequency Control Requirements on the GB
Power System Against a Background of Increasing Renewable Generation.”
PhD Thesis, Brunel University, UK, 2006, pp. 24.
[165] J. Tauschitz, M. Hochfellner. ‘State of the combined cycle power plants.’ In
Energy efficiency conf., Vienna, Austria, 2004.
[166] Department of Energy and Climate Change. “The UK Power Sector: Trends
and Targets.” [Online] Available at:
http://www.publications.parliament.uk/pa/cm201011/cmselect/cmenergy/523/5
2305.htm [Accessed 18 Jan. 2012].