accelerating online cp decompositions for higher order tensors
TRANSCRIPT

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Accelerating Online CP Decompositions for
Higher Order Tensors
Shuo Zhou1, Nguyen Xuan Vinh1, James Bailey1,Yunzhe Jia1 and Ian Davidson2
1The University of Melbourne2University of California, Davis
KDD’2016

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
1 Introduction
2 Preliminary
3 Our Approach
4 Empirical Analysis
5 Conclusion & Future Work

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Introduction

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Motivation
Multi-way structure→ How to represent it?
Highly complex data→ How to simplify it?
New data keeps arriving→ How to learn online?

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Tensor
Tensor (multi-way array) is a natural representation formulti-dimensional data, e.g. videos, time-evolving networks

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
CP Decomposition

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
2.492 2.493 2.494 2.495 2.496 2.497 2.498 2.499 2.5
x 106
2.407
2.408
2.409
2.41
2.411
2.412
2.413x 10
6 Spatial Activations Above Mean Factor 1
0600 0900 1200 1500 1800 2100 00000.04
0.06
0.08
0.1
0.12
0.14
0.16Temporal Activations Above Mean Factor 1
2.492 2.493 2.494 2.495 2.496 2.497 2.498 2.499 2.5
x 106
2.407
2.408
2.409
2.41
2.411
2.412
2.413x 10
6 Spatial Activations Above Mean Factor 2
0600 0900 1200 1500 1800 2100 0000−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5Temporal Activations Above Mean Factor 2
CP decomposition is a method to simplify and summarizetensors
1X. N.Vinh, J. Chan, I. Davidson, Simplifying Spatial Temporal Event Objects into Dictionaries

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
But, online?
Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
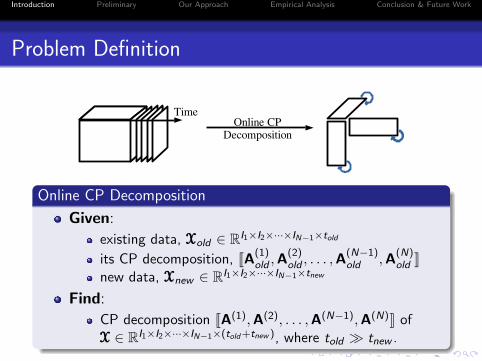
Problem Definition
Online CP Decomposition
Given:
existing data, XXXold ∈ RI1×I2×···×IN−1×told
its CP decomposition, JA(1)old ,A
(2)old , . . . ,A
(N−1)old ,A
(N)old K
new data, XXXnew ∈ RI1×I2×···×IN−1×tnew
Find:
CP decomposition JA(1),A(2), . . . ,A(N−1),A(N)K ofXXX ∈ RI1×I2×···×IN−1×(told+tnew ), where told � tnew .

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Preliminary
Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
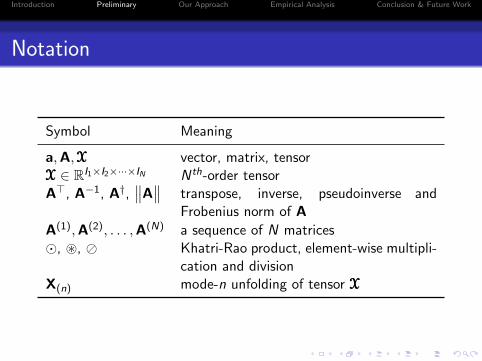
Notation
Symbol Meaning
a,A,XXX vector, matrix, tensorXXX ∈ RI1×I2×···×IN Nth-order tensorA>, A−1, A†,
∥∥A∥∥ transpose, inverse, pseudoinverse and
Frobenius norm of AA(1),A(2), . . . ,A(N) a sequence of N matrices�, ~, � Khatri-Rao product, element-wise multipli-
cation and divisionX(n) mode-n unfolding of tensor XXX

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
CP Decomposition
X(1) ≈ A(C� B)>
X(2) ≈ B(C� A)>
X(3) ≈ C(B� A)>
Algorithm 1 CP-ALS1: initialize A,B,C2: repeat
3: arg minA12
∥∥X(1) − A(C� B)>∥∥2
4: arg minB12
∥∥X(2) − B(C� A)>∥∥2
5: arg minC12
∥∥X(3) − C(B� A)>∥∥2
6: until converged

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Online CP Decomposition
Batch [3]
initialize with previous decompositionstill computationally expensivepoor scalability
SDT and RLST [6]
online tensor decomposition → online matrixfactorizationwork on third-order tensors only
GridTF [7]
divide into small grids and decompose them in parallel

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Our Approach

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Main Idea
ALS like algorithm
for each non-temporal mode, complimentary matricesare used for storing useful information from previousdecomposition
complementary matrices are incrementally updated, andloading matrices are estimated based on them

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Update Time Mode
fix A and B, update C
C =
[Cold
Cnew
]=
[Cold
Xnew (3)((B� A)>)†
]

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Update Non-temporal Modes
fix B and C, update A
L =1
2
∥∥X(1) − A(C� B)>∥∥2
∂L∂A
= A(C� B)>(C� B)− X(1)(C� B)
A = (X(1)(C� B))((C� B)>(C� B))−1
= PQ−1

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Incremental Update
P = X(1)(C� B) Q = (C� B)>(C� B)
P← P + Xnew (1)(Cnew � B)
Q← Q + (Cnew � B)>(Cnew � B)
A← PQ−1

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Empirical Analysis

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Datasets
Datasets SizeSlice Size
SourceS =
∏N−1i=1 Ii
COIL-3D 128× 128× 240 16,384[5]
COIL-HD 64× 64× 25× 240 102,400DSA-3D 8× 45× 750 360
[1]DSA-HD 19× 8× 45× 750 6,840FACE-3D 112× 92× 400 10,304
[8]FACE-HD 28× 23× 16× 400 10,304FOG 10× 9× 1000 90 [2]GAS-3D 30× 8× 2970 240
[4]GAS-HD 30× 6× 8× 2970 1,440HAD-3D 14× 6× 500 64
[10]HAD-HD 14× 12× 5× 6× 500 3,840ROAD 4666× 96× 1826 447,936 [9]

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Baselines
Batch Cold: ALS in Tensor Toolbox [3].
Batch Hot: ALS + previous decomposition.
SDT
RLST
GridTF

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Setup
Procedure
20% initialization, rest added by sliceaveraging over 10 runs
Evaluation metrics
effectiveness:
fitness ,
1−
∥∥∥XXX−XXX
∥∥∥∥∥XXX∥∥× 100%
efficiency: running time in seconds

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Effectiveness
Batch methods always obtain the best fitness overall
OnlineCP shows comparable results as batch algorithms
Performance of other online algorithms are much worse

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Efficiency
Batch methods are extremely time-consuming
Improvement of GridTF is not significant
Both SDT and RLST show very good performance
OnlineCP is also quite efficient and significantly fasterthan batch methods

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Effectiveness & Efficiency
Compared to Batch Hot
Relative fitness:
OnlineCP (97%)
RLST (76%)
GridTF (68%)
SDT (67%)
Speedup:
OnlineCP (555.59)
RLST (113.75)
SDT (93.56)
GridTF (1.75)

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Sensitivity to Initialization
XXX ∈ R20×20×100
best ALS fitness: 90.14%
200 trails of ALS initializationwith ε ∈ [9e − 1, 1e − 4]
initial fitness: 65.78± 15.3704
Final Fitness
Batch Hot 82.57±10.1474SDT 7.68±55.5205RLST 33.15±36.9270GridTF 57.43±15.2148OnlineCP 67.67±12.9846

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Scalability – Time
XXX ∈ R20×20×105
Length of Time Mode ×104
0 2 4 6 8 10
Ru
nn
ing
Tim
e
10-4
10-3
10-2
10-1
100
101
Batch Hot
SDT
RLST
GridTF
GridTF-update
OnlineCP
(a) Log scale
Length of Time Mode ×104
0 2 4 6 8 10
Ru
nn
ing
Tim
e
0
0.005
0.01
0.015
0.02
0.025
SDT
RLST
GridTF
GridTF-update
OnlineCP
(b) Normal scale

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Scalability – Slice Size
100 timestamps, slice size [100, 9× 106]
Slice Size ×106
0 2 4 6 8 10
Runnin
g T
ime
10-4
10-2
100
102
Batch Hot
SDT
RLST
GridTF
OnlineCP
(a) Log scale
Slice Size ×106
0 2 4 6 8 10
Runnin
g T
ime
0
2
4
6
8
10
12
Batch Hot
SDT
RLST
GridTF
OnlineCP
(b) Normal scale

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
Conclusion & Future Work

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
In conclusion, OnlineCP:1 is applicable to both 3rd and higher order online tensors2 shows very good quality of decompositions and
significant improvement in efficiency3 outperforms existing online approaches in terms of
stability and scalability
Future work:1 applications2 dynamic tensors3 constrained online tensor decomposition

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
PDF & Code: http://shuo-zhou.info

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
References I
K. Altun, B. Barshan, and O. Tuncel.
Comparative study on classifying human activities with miniature inertial and magnetic sensors.Pattern Recognition, 43(10):3605–3620, 2010.
M. Bachlin, M. Plotnik, D. Roggen, I. Maidan, J. M. Hausdorff, N. Giladi, and G. Troster.
Wearable assistant for parkinson’s disease patients with the freezing of gait symptom.Information Technology in Biomedicine, IEEE Transactions on, 14(2):436–446, 2010.
B. W. Bader, T. G. Kolda, et al.
Matlab tensor toolbox version 2.6.Available online, February 2015.
J. Fonollosa, S. Sheik, R. Huerta, and S. Marco.
Reservoir computing compensates slow response of chemosensor arrays exposed to fast varying gasconcentrations in continuous monitoring.Sensors and Actuators B: Chemical, 215:618–629, 2015.
S. A. Nene, S. K. Nayar, H. Murase, et al.
Columbia object image library (coil-20).Technical report, technical report CUCS-005-96, 1996.
D. Nion and N. D. Sidiropoulos.
Adaptive algorithms to track the parafac decomposition of a third-order tensor.Signal Processing, IEEE Transactions on, 57(6):2299–2310, 2009.

Introduction Preliminary Our Approach Empirical Analysis Conclusion & Future Work
References II
A. H. Phan and A. Cichocki.
Parafac algorithms for large-scale problems.Neurocomputing, 74(11):1970–1984, 2011.
F. S. Samaria and A. C. Harter.
Parameterisation of a stochastic model for human face identification.In Applications of Computer Vision, 1994., Proceedings of the Second IEEE Workshop on, pages 138–142.IEEE, 1994.
F. Schimbinschi, X. V. Nguyen, J. Bailey, C. Leckie, H. Vu, and R. Kotagiri.
Traffic forecasting in complex urban networks: Leveraging big data and machine learning.In Big Data (Big Data), 2015 IEEE International Conference on, pages 1019–1024. IEEE, 2015.
M. Zhang and A. A. Sawchuk.
Usc-had: a daily activity dataset for ubiquitous activity recognition using wearable sensors.In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, pages 1036–1043. ACM, 2012.

Q & A