a novel projected two-binary-variable formulation for unit
TRANSCRIPT

Applied Energy 187 (2017) 732–745
Contents lists available at ScienceDirect
Applied Energy
journal homepage: www.elsevier .com/ locate/apenergy
A novel projected two-binary-variable formulation for unit commitmentin power systems
http://dx.doi.org/10.1016/j.apenergy.2016.11.0960306-2619/� 2016 Elsevier Ltd. All rights reserved.
⇑ Corresponding author.E-mail address: [email protected] (J. Jian).
Linfeng Yang a, Chen Zhang a, Jinbao Jian b,⇑, Ke Meng c, Yan Xu c, Zhaoyang Dong c,d
a School of Computer Electronics and Information, and Guangxi Key Laboratory of Power System Optimization and Energy Technology, Guangxi University, Nanning 530004, ChinabCollege of Mathematics and Statistics, Yulin Normal University, Yulin 537000, Chinac School of Electrical and Information Engineering, The University of Sydney, NSW 2006, Australiad The Electric Power Research Institute, CSG, Guangzhou 510080, China
h i g h l i g h t s
� A novel formulation is proposed with only two sets of binary variables.� The new model is more compact with fewer constraints and nonzeros.� The production cost functions for generating units are tightened.� The proposed model can be more efficiently solved using commercial solvers.
a r t i c l e i n f o
Article history:Received 29 June 2016Received in revised form 18 November 2016Accepted 25 November 2016
Keywords:Unit commitmentProjectCompactTightReformulation
a b s t r a c t
The thermal unit commitment (UC) problem in power systems can usually be formulated as a mixed-integer quadratic programming (MIQP) problem, which is an NP-hard problem for practical-scale systemsand thus is difficult to solve efficiently. In this paper, by projecting the unit generation level onto theinterval ½0;1� and using reformulation techniques, a novel two-binary-variable (2-bin) MIQP formulationfor the UC problem is proposed. The proposed 2-bin formulation is more compact than the state-of-the-art one-binary-variable (1-bin) and three-binary-variable (3-bin) formulations. Moreover, the 2-bin for-mulation is tighter than the 1-bin and 3-bin formulations in terms of the quadratic cost function, and it istighter than the 1-bin formulation in terms of linear constraints. The proposed model was tested on 73instances, including 43 realistic instances and 30 8-unit-based instances, over a scheduling period of 24 hfor systems ranging from 10 to 1040 generating units. The simulation results show that our proposedMIQP UC formulation is the tightest and most compact model and can be solved most efficiently. Afterintroducing a sequence of piecewise perspective cuts to approximate the quadratic operational cost func-tion, the three UC MIQP formulations can be approximated by three corresponding mixed-integer linearprogramming (MILP) formulations. Our experiments show that the proposed 2-bin MILP formulation alsoperforms the best in terms of solution times.
� 2016 Elsevier Ltd. All rights reserved.
1. Introduction
The purpose of the unit commitment (UC) problem is to clearthe day-ahead electricity market for power system operation[1,2]. It is an important optimization problem for traditional dailyoperation scheduling [2,3] because the results have a significantimpact on market operators [4]. Moreover, it is also an extremelycrucial basic problem for system planning, ranging from short-term to long-term planning horizons, for the optimal use of
renewable energy resources [5–7], the mitigation of environmentalpollutants originating from electricity generation [8,9], the integra-tion or management of energy storage systems and electric vehi-cles [10–12], and the forecasting of uncertainty factors for powersystems [13]. In general, the UC problem can usually be modeledas a mathematical programming problem [1,2] with the objectiveof determining the operation schedules of the generating units ineach time period with varying loads under different operating con-straints and environments. The complexity of the operational con-straints and the nonconvexity of the problem, in addition to itslarge-scale nature, make the UC problem challenging to solve.
Nomenclature
Indexesi index for thermal unitst index for time periods
Operator½��þ maxð0; �Þ
ConstantsN total number of unitsT total number of time periodsai;bi; ci coefficients of the quadratic production cost function for
unit iChot;i hot startup cost of unit iCcold;i cold startup cost of unit iTon;i minimum up time of unit iToff ;i minimum down time of unit iTcold;i cold startup time of unit iPi maximum power output of unit iPi minimum power output of unit iPD;t system load demand in period tRt spinning reserve requirement in period tPup;i ramp-up rate of unit i
Pdown;i ramp-down rate of unit iPstart;i startup capability of unit iPshut;i shutdown capability of unit iui;0 initial commitment state of unit i (equal to 1 if it is on-
line and 0 if it is offline)Ti;0 number of periods for which unit i has been online (+) or
offline (�) prior to the first period of the time span (endof period 0)
Ui ½min½T;ui;0ðTon;i � Ti;0Þ��þLi ½min½T;ui;0ðToff ;i þ Ti;0Þ��þ
Continuous variablesPi;t power output of unit i in period tSi;t startup cost of unit i in period t
Binary variablesui;t commitment status of unit i in period t (equal to 1 if
unit i is online in period t and 0 if it is offline)si;t startup status of unit i in period t (equal to 1 if unit i
starts up in period t and 0 otherwise)di;t shutdown status of unit i in period t (equal to 1 if unit i
shuts down in period t and 0 otherwise)
L. Yang et al. / Applied Energy 187 (2017) 732–745 733
Significant work has been conducted on the UC problem overthe past 5 decades, and many solution methods have been pro-posed. The existing approaches can be generally classified into arti-ficial intelligence (AI) methods and numerical optimizationmethods. The AI methods include particle swarm optimization[14,15], genetic algorithms [16], evolutionary algorithms [17–19],simulated annealing [20], and hybrid methods that combine twoor more of the aforementioned methods [21]. The numerical opti-mization methods include priority list (PL) algorithms [22],dynamic programming (DP) [23], Lagrangian relaxation (LR) [24],semidefinite programming (SDP) [25], the tight relaxation method(TRM) [26,27], the branch and bound (B&B) approach [28], Bendersdecomposition (BD) [3], and outer approximation (OA) [29,30]. AImethods can produce fair solutions within a reasonable computa-tion time. However, the quality of the solutions is difficult to guar-antee [1]. Among the numerical optimization methods, PLalgorithms are the easiest to implement with a fast convergencerate. However, such algorithms usually suffer from being highlyheuristic in nature and yield relatively poor-quality solutions[22]. DP is an exact method that can produce globally optimal solu-tions for moderate-size UC problems. However, it becomes imprac-tical for larger systems because the solution space andcomputation time increase rapidly [23]. Historically, LR has beenthe method of choice for the UC scheduling software that is usedin the power industry for large-scale instances when a very fastcomputation time is a priority [24]. However, in general, the solu-tion obtained via LR by solving the dual problem of the UC problemis not feasible. Therefore, heuristic approaches are needed to assistin searching for feasible solutions. This sub-optimality is LR’s mainshortcoming. SDP is a relaxation method in which the UC problemis rewritten as a relaxed SDP problem that can be solved by mod-ern solvers. The main disadvantages of the SDP method are the dif-ficulty of directly obtaining feasible solutions and the significantcomputational challenges it poses [25]. The TRM constructs andsolves one or a sequence of tight continuous relaxations for theUC mixed-integer programming (MIP) model and then obtainssuboptimal solutions to the UC problem by applying heuristic
methods to the solutions of the tight relaxed problems. Althoughthe TRM often requires less computation time than SDP does, itsuffers from the shortcoming of sub-optimality because an enor-mous number of (always unrealistic) inequalities are needed todescribe the convex hull of the UC feasible set [26]. The B&B, BD,and OA approaches can theoretically produce exact (or nearlyexact) solutions. However, these algorithms have impractical com-putation time requirements for large-scale systems. A moredetailed review can be found in [1].
With the significant progress in the theory of MIP and theimprovements in the efficiency of general-purpose MIP solvers thathave been achieved in recent years [31–35], efforts to solve the UCproblem using MIP methods are becoming increasingly popular.Recently, the world’s largest competitive electricity wholesalemarket, PJM, switched from using LR to using MIP to address itsUC-based scheduling problems [36]. General-purpose MIP solverscan produce solutions of comparable quality within comparablecomputation times. Such solvers are easier to use, and the modelsare easier to modify to consider other new factors. Furthermore,such solvers provide not only feasible solutions but also optimalityguarantees, which ensure that the solutions will indeed be accu-rate to the required precision. Given that the operational cost ofa thermal unit is commonly represented as a quadratic functionof its generation level, the UC problem can be formulated as amixed-integer quadratic programming (MIQP) problem anddirectly solved using such solvers [37]. By using perspective refor-mulation [32], a mixed-integer second-order cone programming(MISOCP) model has been formulated for the UC problem, and thismodel is tighter than the MIQP model. However, the numericalresults reported in [38] show that approximating the UC problemas a mixed-integer linear programming (MILP) problem and solv-ing it using MILP solvers is more competitive than simply solvingthe MIQP or MISOCP formulation directly. After lower approxima-tion of the quadratic objective function as a piecewise linear func-tion, in [39], the UC problem was solved using an MILP method. In[40], a perspective-cut-based MILP approximation was proposed,which was tighter than the lower approximation used in [39]. In

734 L. Yang et al. / Applied Energy 187 (2017) 732–745
[41], a sequence of linear constraints was employed to approxi-mate the second-order cone constraint, and an approximate MILPUC formulation was proposed whose size grew logarithmicallywith the increasing level of accuracy.
Although solving the UC problem using MIP methods is attrac-tive, it is well known that MIP problems are NP-hard, and solvingUC problems of realistic size, with hundreds or even thousandsof units, remains challenging. Moreover, in the smart grid andfuture energy internet era, UC or UC-based problems [42] willbecome more advanced and computationally demanding whileadditional complicated yet practical factors, such as the valve-point effect [43], stochastic formulations [44–46], transmissionswitching [47], and stability constraints [48] are introduced. Nev-ertheless, improvements to MIP formulations for the UC problemcan dramatically improve its solution efficiency.
In recent years, efforts to improve MIP formulations in terms oftightness or compactness have been widely researched in the fieldof mathematical programming. The tightness of an MIP formula-tion is defined as the difference between the optimal values forthe continuous relaxation and the original MIP problem [33].Tightening an MIP formulation, usually by adding cutting planes,can reduce the search space that the solver needs to explore[35,49]. Meanwhile, the compactness refers to the quantity of datathat must be processed when solving the problem. Because thereare many relaxations that must be solved when solving an MIPproblem, the compactness of such a problem always refers to thesize of these relaxations [50]. A more compact formulation canspeed up the search for the optimal solutions.
Regarding the UC problem, a more compact formulation waspresented in [39] by eliminating two sets of binary variables fromthe three-binary-variable (3-bin) formulation presented in [51].Computational results were presented in [39] to prove that theresulting formulation with only one set of binary variables (1-binformulation) performed better than the 3-bin formulation [51,52]in terms of the required solution time. More recently, however,in [53], sequences of valid inequalities and improved technicalconstraints [54] with three sets of binary variables were used totighten the feasible region of the UC problem. The tightness ofthe 3-bin formulation presented in [53] leads to superior computa-tional performance, but it loses the compactness of the 1-bin for-mulation. Moreover, the model presented in [53] is not easy toimplement for commercial solvers because an ad-hoc configura-tion is necessary for introducing these valid inequalities. Subse-quently, a tight and compact UC formulation was provided in[55], but that paper was primarily focused on the reformulationof the startup costs of the units and did not consider the nonlinearproduction costs. In [26], a tight MISOCP UC model was con-structed by iteratively multiplying the linear constraint set by sev-eral 0–1 variables and their complements. However, the resultingtight model is actually a very large-scale problem in higher-dimensional space; it is suitable only for relaxation methods, andthe global optimality of the solutions cannot be guaranteed.
In this paper, based on the projection of the unit generationlevel and reformulation techniques, a novel MIQP formulation withtwo sets of binary variables (2-bin formulation) is presented thatcorresponds to the same UC problem as the state-of-the-art 1-binand 3-bin formulations; i.e., the three formulations have the sameoptimal values and contain the equivalent integer feasible solu-tions in a space consisting only of variables representing the unitstatuses and generation levels. The main contributions of thispaper are threefold: First, by projecting Pi;t onto the interval½0;1�, a tight MIQP formulation for the UC problem is proposed toreduce the search space and, therefore, the computational burden.Second, compared with the state-of-the-art formulations, theproposed 2-bin formulation is usually more compact, with fewer
constraints and nonzeros than both the 1-bin and 3-bin formula-tions and with fewer variables than the 3-bin formulation. In addi-tion, the projection procedure makes several constraints, especiallythe unit generation limits, simpler and more structured. These newconstraints can often be exploited by a solver to reduce UC MIPmodels more efficiently, which causes the reduced problem ofour 2-bin formulation to be the most compact among the threereduced problems. Third, the projection and reformulations usedin this paper can also be used as the core of a method for solvingother large-scale UC-based problem, in a certain or uncertainenvironment.
The remainder of this paper is organized as follows. In Section 2,the state-of-the-art 1-bin and 3-bin MIQP formulations for the UCproblem are reviewed. In Section 3, our novel projected 2-bin for-mulation is presented, with the necessary reformulations and pro-jection, and its compactness and tightness are discussed. InSection 4, we report and analyze our computational results to ver-ify the effectiveness of the proposed 2-bin formulation. Finally, theconclusions of our study are presented in Section 5.
2. 1-bin and 3-bin formulations for UC
The prototypical MIP formulation for UC can be found in [51], inwhich three binary variables are used to represent the unit sta-tuses, i.e., on/off (ui;t), startup (si;t), and shutdown (di;t). Therefore,the model is called the 3-bin formulation. Carrión and Arroyo[39] presents the first 1-bin UC formulation, developed by elimi-nating two sets of binary variables from the 3-bin model. Sincethese publications, these prototypical 1-bin and 3-bin formulationshave received considerable attention and have been continuouslyimproved over several decades [56–60]. In this section, we willreview the state-of-the-art 1-bin and 3-bin formulations availablein the literature.
2.1. 1-bin UC formulation
Carrión and Arroyo [39] was the first paper to present a UC for-mulation with only one set of binary variables (ui;t). The objectivefunction of the 1-bin UC formulation is
min FC ¼XNi¼1
XTt¼1
½f iðPi;tÞ þ Si;t�; ð1Þ
where FC is the total operation cost, the production cost is
f iðPi;tÞ ¼ aiui;t þ biPi;t þ ciðPi;tÞ2, and Si;t is the startup cost. The star-tup cost Si;t can be expressed as an MILP formulation [39]:
Si;t P Ki;s ui;t �Xsj¼1
ui;t�j
" #;
Si;t P 0; i ¼ 1; . . . ;N; t ¼ 1; . . . ; T; s ¼ 1; . . . ;ND;i;
8><>: ð2Þ
where ND;i is a given parameter and Ki;s models the startup cost as astepwise function that becomes more accurate as the number ofintervals increases:
Ki;s ¼Chot;i : s ¼ 1; . . . ; Toff;i þ Tcold;i;
Ccold;i : s ¼ Toff ;i þ Tcold;i þ 1; . . . ;ND;i:
�Note that it is sufficient to write (2) only for those
s 2 f1; . . . ;ND;ig for which Ki;s – Ki;s�1. In this paper, we lets 2 f1; Toff ;i þ Tcold;i þ 1g.
The constraints of the 1-bin UC formulation are as follows:
(1) Unit generation limits:
ui;tPi 6 Pi;t 6 ui;tPi: ð3Þ

L. Yang et al. / Applied Energy 187 (2017) 732–745 735
(2) Power balance constraint:XNi¼1
Pi;t � PD;t ¼ 0: ð4Þ
(3) System spinning reserve requirement:XNi¼1
ui;tPi P PD;t þ Rt: ð5Þ
(4) Ramp rate limits:Pi;t � Pi;t�1 6 ui;t�1Pup;i þ ðui;t � ui;t�1ÞPstart;i þ ð1� ui;tÞPi; ð6ÞPi;t�1 � Pi;t 6 ui;tPdown;i þ ðui;t�1 � ui;tÞPshut;i þ ð1� ui;t�1ÞPi: ð7Þ
(5) Minimum up/down time constraints [56]:ui;t � ui;t�1 6 ui;s; s 2 ½t þ 1;minft þ Ton;i � 1; Tg�; ð8Þui;t�1 � ui;t 6 1� ui;s; s 2 ½t þ 1;minft þ Toff;i � 1; Tg�: ð9Þ
(6) Initial status of units:ui;t ¼ ui;0; t 2 ½1; . . . ;Ui þ Li�: ð10Þ
Then, the state-of-the-art 1-bin UC MIQP formulation can bepresented as
min FC ¼XNi¼1
XTt¼1
aiui;t þ biPi;t þ ciðPi;tÞ2 þ Si;th i
s:t:ð2Þ—ð10Þui;t 2 f0;1g:
� ð11Þ
2.2. 3-bin UC formulation
Compared with the 1-bin formulation, 3-bin formulations havereceived more attention and more improvements, especially interms of tightness, in recent years.
State constraints were introduced in the original 3-bin formula-tion of [51] to link the startup, shutdown, and state variables.
si;t � di;t ¼ ui;t � ui;t�1: ð12ÞIn [54], Rajan and Takriti use si;t and di;t to formulate the follow-
ing tighter minimum up/down time constraints:Xt
-¼½t�Ton;i �þþ1
si;- 6 ui;t ; t 2 ½Ui þ 1; . . . ; T�; ð13Þ
Xt
-¼½t�Toff ;i �þþ1
di;- 6 1� ui;t; t 2 ½Li þ 1; . . . ; T�: ð14Þ
Indeed, [54] shows that constraints (13) and (14) define facetsof the minimum up/down time polytope.
Popular 3-bin expressions for ramp rate limits are [57]
Pi;t � Pi;t�1 6 ui;t�1Pup;i þ si;tPstart;i; ð15ÞPi;t�1 � Pi;t 6 ui;tPdown;i þ di;tPshut;i: ð16Þ
It is obvious that when ui;t�1 ¼ 1 and ui;t ¼ 0, �Pi;t�1 6 Pup;i canbe drawn from (15), whereas �Pi;t�1 6 Pup;i þ Pi � Pstart;i can bedrawn from (6). Commonly, Pi P Pstart;i, so (15) is tighter than (6).However, (15) cannot be sufficiently tight in period t because itshould be the case that �Pi;t�1 6 �Pi 6 0, but the right-hand sideof (15) is Pup;i þ Pi � Pstart;i > 0. A similar argument can also beapplied to (16). In fact, these (along with many others) were themotivation behind studying tighter ramping constraints and validinequalities in [53], [58,59]. In particular, [59] provided the follow-ing strengthened ramp-up/ramp-down constraints:
Pi;t �Pi;t�1 6ui;tðPup;iþPiÞ�ui;t�1Piþ si;tðPstart;i�Pup;i�PiÞ; ð17ÞPi;t�1�Pi;t 6ui;t�1ðPdown;iþPiÞ�ui;tPiþdi;tðPshut;i�Pdown;i�PiÞ; ð18Þ
which were proven to be facet-defining for the two-period ramprate polytopes [59].
With si;t and di;t , the startup cost Si;t can be expressed as an MILPformulation [41], [60]:
Si;t P Chot;isi;t; ð19Þ
Si;t P Ccold;i si;t �Xt�1
s¼maxðt�Toff;i�Tcold;i ;1Þdi;s � f init;i;t
24 35; ð20Þ
where f init;i;t ¼ 1 when t � Toff;i � Tcold;i 6 0 and
½�Ti;0�þ < jt � Toff;i � Tcold;i � 1j þ 1, whereas f init;i;t ¼ 0 otherwise.Then, the state-of-the-art 3-bin UC MIQP formulation is as
follows:
min FC ¼XNi¼1
XTt¼1
½aiui;t þ biPi;t þ ciðPi;tÞ2 þ Si;t �
s:t:ð12Þð19Þð20Þð3Þ—ð5Þð17Þð18Þð13Þð14Þð10Þui;t ; si;t; di;t 2 f0;1g:
� ð21Þ
3. Proposed tight and compact 2-bin formulation
In this section, we present our new formulation for the UC prob-lem based on projection and reformulations. The proposed 2-binformulation is significantly tighter than the 1-bin model, and itincludes fewer variables and is notably more compact than the3-bin model. Meanwhile, it maintains the same tightness as the3-bin model in terms of constraints and is tighter than the 3-binmodel in quadratic terms.
3.1. 2-bin UC formulation
From ui;tPi 6 Pi;t 6 ui;tPi and ui;t 2 f0;1g, we havePi;t 2 0 [ ½Pi; Pi�. Thus, Pi;t can be regarded as a semi-continuousvariable. Let
Pi;t ¼ ePi;tðPi � PiÞ þ ui;tPi; ePi;t 2 ½0;1�: ð22ÞPi;t can be projected onto [0,1]; then, this substitution allows semi-continuous variables to be eliminated from our model [26].
With the projection substitution given above, the unit genera-tion limits can be reformulated as follows:
0 6 ePi;t 6 ui;t : ð23Þ(23) uses T � N fewer constraints than (3) because the con-
straints on the left of (3) have all been converted into lower bounds
on ePi;t . Moreover, it is important to note that (23) is simpler andmore structured than (3); therefore, off-the-shelf solvers can oftenbetter exploit (23) to reduce the MIP problem more efficiently[61,62].
After eliminating Pi;t by using (22) and noting that ui;tePi;t ¼ ePi;t
and ðui;tÞ2 ¼ ui;t for ui;t 2 f0;1g, the objective function of the UCproblem, that is, (1), can be reformulated as follows:
FC ¼XNi¼1
XTt¼1
~f iðePi;tÞ þ Si;t ; ð24Þ
where ~f iðePi;tÞ ¼ ~aiui;t þ ~biePi;t þ ~ciðePi;tÞ
2, ~ai ¼ ai þ biPi þ ciðPiÞ2,
~bi ¼ ðPi � PiÞðbi þ 2ciPiÞ, and ~ci ¼ ciðPi � PiÞ2.It is obvious that ui;t
ePi;t 6 ePi;t and ðui;tÞ2 6 ui;t for 0 6 ui;t 6 1.
Thus, it is not difficult to prove that aiui;t þ biPi;t þ ciðPi;tÞ2 6~aiui;t þ ~bi
ePi;t þ ~ciðePi;tÞ2. Therefore, (24) is ‘‘tighter” than (1). The
tightness of (24) is discussed in detail in Appendix A.

Table 1The numbers of variables.
1-bin 3-bin 2-bin
Total variables 3NT 5NT 4NT
736 L. Yang et al. / Applied Energy 187 (2017) 732–745
The power balance constraint can be reformulated as follows:XNi¼1
½ePi;tðPi � PiÞ þ ui;tPi� � PD;t ¼ 0: ð25Þ
The number of variables is considered to be one important indi-cator of a model’s compactness. Carrión and Arroyo [39] eliminatestwo sets of binary variables; however, the 1-bin formulation thusobtained loses the tightness of the 3-bin formulation. In the follow-ing paragraphs, also considering the previously presented projec-tion substitution, we will present our 2-bin (employing only ui;t
and si;t) unit constraint expressions, which are as tight as but morecompact than the corresponding 3-bin expressions.
First, the state constraints given in (12) can be substituted with
ui;t � ui;t�1 6 si;t ð26ÞIt can be seen that when ui;t�1 ¼ 0 and ui;t ¼ 1, (26) guarantees
that si;t ¼ 1, whereas for other cases, the Si;t in the objective func-tion induces si;t ¼ 0. Therefore, (26) represents effective state con-straints with fewer nonzeros.
Then, let
ePup;i ¼ Pup;i
Pi � Pi; ð27Þ
ePdown;i ¼ Pdown;i
Pi � Pi
; ð28Þ
ePstart;i ¼ Pstart;i � Pi
Pi � Pi
; ð29Þ
ePshut;i ¼ Pshut;i � Pi
Pi � Pi
: ð30Þ
The 2-bin expressions for the ramp rate limits can be formu-lated as follows:ePi;t � ePi;t�1 6 ui;t
ePup;i þ si;tðePstart;i � ePup;iÞ; ð31ÞePi;t�1 � ePi;t 6 ui;t�1ePshut;i þ ðsi;t � ui;tÞðePshut;i � ePdown;iÞ: ð32Þ
It is not difficult to verify that (31) and (32) are also facet-defining for the two-period ramp rate limit polytopes (a detailedproof is given in Appendix B). However, (31) contains fewer nonze-ros than (17) does.
The 2-bin minimum down time constraints, which are equiva-lent to (14), can be formulated as follows:Xt
-¼½t�Toff;i �þþ1
si;- 6 1� ui;lt ; t 2 ½Li þ 1; . . . ; T�; ð33Þ
where lt ¼ ½t � Toff ;i�þ.Eliminating di;t from (20) yields
Si;t P Ccold;i si;t �Xt�1
s¼maxðt�Toff;i�Tcold;i�1;1Þui;s � f 0init;i;t
24 35; ð34Þ
where f 0init;i;t ¼ 1 when t � Toff ;i � Tcold;i � 1 6 0 and
½�Ti;0�þ < jt � Toff;i � Tcold;i � 1j þ 1, whereas f 0init;i;t ¼ 0 otherwise.
Commonly, Ccold;i P Chot;i; therefore, after introducing eSi;t to rep-resent the part of the startup cost that exceeds Chot;i, we can refor-mulate the objective function as
min FC ¼XNi¼1
XTt¼1
ui;t~f iðePi;tÞ þ Chot;isi;t þ eSi;t
h i: ð35Þ
Simultaneously, (19) can be discarded, and (34) should be refor-mulated as
eSi;t P ðCcold;i � Chot;iÞ si;t �Xt�1
s¼maxðt�Toff ;i�Tcold;i�1;1Þui;s � f 0init;i;t
24 35: ð36Þ
As seen above, although there is a small increase in the number ofnonzeros in the objective function, the number of constraintsregarding the startup costs is significantly decreased.
Now, we obtain our novel 2-bin MIQP UC formulation asfollows:
min FC ¼XNi¼1
XTt¼1
½ui;t~f iðePi;tÞ þ Chot;isi;t þ eSi;t �
s:t:ð26Þð36Þð23Þð25Þð5Þð31Þð32Þð13Þð33Þð10Þui;t ; si;t 2 f0;1g
�:
ð37Þ
Note that in our 2-bin formulation, si;t is explicitly defined asbinary just as si;t and di;t are explicitly defined as binary in the3-bin formulation [53], although the integrality condition on thesevariables can be relaxed because ui;t and the constraints guaranteethat si;t will always take binary values. The analyses and numericalresults presented in [53,55] show that, with this approach, MIP sol-vers can employ techniques such as cutting planes and node pre-solve to exploit the integrality characteristic of integer variablesto solve MIP problems more efficiently.
3.2. Analysis of tightness and compactness
In this subsection, we will discuss the tightness and compact-ness of our 2-bin formulation and of the other two formulationsreviewed in the previous section.
The first topic to address is tightness. According to the descrip-tions of the three models, the 3-bin formulation given in (21) istighter than the 1-bin formulation because of the tightness of the3-bin minimum up/down time and ramp rate constraints, andthe 2-bin formulation given in (37) is tighter than the 3-bin formu-lation in quadratic terms.
The second is compactness. Ignoring the effects exerted on theformulations by the initial statuses, the numbers of variables, con-straints, and nonzeros in the three models are listed in Tables 1–3,respectively. From these tables, we can see that the 2-bin model ismore compact than the 3-bin model because it has fewer variables,fewer constraints, and fewer nonzeros. The 2-bin model has morevariables than the 1-bin model; however, whenPN
i¼1ðTon;i þ Toff ;iÞ > 4N, which is very common in realistic powersystems, the 2-bin model has fewer nonzeros than the 1-bin
model, and whenPN
i¼1ðTon;i þ Toff ;iÞ > 3N, the 2-bin model hasfewer constraints than the 1-bin model.
3.3. MILP approximations
Because of the significant improvements that have beenachieved in off-the-shelf MILP solvers, approximating the UC MIQPformulation as an MILP and directly passing it to an MILP solver is avery popular approach for solving the UC problem.
Assume that L > 0 is a given parameter, and letpi;l ¼ Pi þ lðPi � PiÞ=L and l ¼ 0;1;2; . . . ; L. For the 1-bin model givenin (11) (or the 3-bin model given in (21)), after replacing the quad-
ratic polynomial function aiui;t þ biPi;t þ ciðPi;tÞ2 in the objectivefunction with a corresponding auxiliary variable zi;t and addingto the original formulation the linear constraints [40]
zi;t P ð2cipi;l þ biÞPi;t þ ðai � ciðpi;lÞ2Þui;t ; ð38Þ

Table 4Comparison of total costs according to all three models.
Test case Total cost from all three models/$
With ramp constraints Without ramp constraints
10_std.mod 570,978 563,93810_0_1_w.mod 1,944,846 1,924,693
Table 2The numbers of constraints.
Constraints 1-bin 3-bin 2-bin
State – NT NTStartup cost 2NT 2NT NTUnit generation 2NT 2NT NTPower balance T T TSystem reserve T T TRamp rate 2NT 2NT 2NTUp/down time PN
i¼1ðTon;i þ Toff ;iÞ � 2Nh i
T 2NT 2NT
Total 4N þPNi¼1ðTon;i þ Toff ;iÞ
h iT þ 2T 9NT þ 2T 7NT þ 2T
L. Yang et al. / Applied Energy 187 (2017) 732–745 737
we obtain the 1-bin (or 3-bin) MILP model that approximates theoriginal 1-bin (or 3-bin) MIQP model.
Similarly, suppose that we replace ~aiui;t þ ~biePi;t þ ~ciðePi;tÞ
2in the
2-bin model given in (37) with zi;t and add the following con-straints (l ¼ 0;1;2; . . . ; L):
zi;t P ð2~cil=Lþ ~biÞePi;t þ ð~ai � ~ciðl=LÞ2Þui;t ; ð39Þthus, we obtain a 2-bin MILP approximation of (37).
Note that after the MILP approximation procedure, eachobtained MILP model will contain an additional N � T continuousvariables (i.e., zi;t), N � T � ðLþ 1Þ constraints, and3N � T � ðLþ 1Þ nonzeros compared with its corresponding origi-nal MIQP model. Therefore, just like the 2-bin MIQP model, the2-bin MILP model will exhibit better compactness than the othertwo MILP models.
4. Numerical results and analysis
To assess the efficiency and effectiveness of the proposed novel2-bin MIP UC formulation, we compared it with the state-of-the-art 1-bin and 3-bin formulations. The machine on which we per-formed all of our computations was an Intel i7-4600U 2.7 GHz Len-ovo notebook with 8 GB of RAM, running MS-Windows 7 (64-bit)and Eclipse 4.5.1 with JDK 1.8.0. We used Java to call CPLEX12.6.2 to solve the quadratic programming, MIQP, and MILP prob-lems with the time limit for the solver set to 5 h in our numericalexperiments. Unless otherwise specified, all other CPLEX parame-ters were set to their default values, which work well for mostproblems and are officially recommended by CPLEX [63].
4.1. Comparison of the three MIQP formulations
Forty-three randomly generated realistic instances with 10–200units running for a time span of 24 h were used in our experiments.The data set includes 6 different data values for 10-unit systems,12 different data values for 200-unit systems, and five differentdata values each for 20-, 50-, 75-, 100-, and 150-unit systems.One of the 10-unit systems, denoted by ‘‘10_std”, is a popular test
Table 3The numbers of nonzeros.
Constraints 1-bin 3-bin
State – 4NTStartup cost 6N þPN
i¼1ðToff ;i þ Tcold;iÞh i
T 4N þh
Unit generation 4NT 4NTPower balance NT NTSystem reserve NT NTRamp rate 8NT 10NTUp/down time �6N þ 3
PNi¼1ðTon;i þ Toff ;iÞ
h iT 2N þ
hTotal 14N þPN
i¼1ð3Ton;i þ 4Toff ;i þ Tcold;iÞh i
T 26Nh
system that is described in [23]. The other cases and their detaileddescriptions can all be freely downloaded at [64]. Each system con-tains small, medium and large units in realistic proportions. Thestartup and shutdown ramp limits are both equal to the minimumallowed power output. The ramp limits are set in accordance withthe unit size, such that large units require 2–3 h to ramp from theirminimum to their maximum output limits. This data set has previ-ously been widely used for testing various methods of solving UCproblems [26,37,38,40,41].
First, we demonstrated the validity of our proposed formulationby using CPLEX with the accuracy set to 0% to solve the three MIQPmodels directly for small cases. The three models all obtained thesame optimal values, and the total costs for two small 10-unitcases with and without ramp constraints are listed in Table 4.
We are now in a position to demonstrate the tightness andcompactness of our 2-bin MIQP formulation. Throughout theremainder of this paper, the ramp rate constraints are always con-sidered, and all results reported for these 43 randomly generatedinstances are the averaged results for all five (or six or twelve) sys-tems with the same number of units.
We first compare the tightness of the three MIQP models. Asmentioned in Section 1, the tightness of an MIP formulation isdefined as the difference between the optimal values for the con-tinuous relaxation and the original MIP problem, so the tightnesscan often be measured based on the relative integrality gap [33].The relative integrality gap for a given MIP problem can be definedas ðZMIP � ZCRÞ=ZMIP. In this expression, ZCR represents the optimalvalue for the continuous relaxation of the original MIP problem,and ZMIP represents the optimal value for the original MIP problem.However, in practice, MIP problems are difficult to solve for theirreal optima; they can be solved only to a preset optimal tolerance.To ensure a fair comparison, we use the same ZMIP for all threeMIQP models, namely, the best integer solution that was foundusing CPLEX with the accuracy set to 0.5% among the three MIQPmodels. We denote the initial relative integrality gap calculatedin this way by ‘‘iGap”. Thus, the difference in iGap should accu-rately reflect the difference in tightness of the MIP models’ initialcontinuous relaxations.
Fig. 1 shows the iGap values for all formulations in comparisonwith those for the 3-bin formulation (in ratio form) for all test sys-tems, where the ratio for the 3-bin model itself is always equal to100%. The detailed values of iGap for the 3-bin model are also givenas labels in the figure. In this figure, ‘‘N” represents the totalnumber of generating units in the test instances. As seen in
2-bin
3NTPNi¼1ðToff ;i þ Tcold;iÞ
iT 3N þPN
i¼1ðToff ;i þ Tcold;iÞh i
T
2NT2NTNT9NTPN
i¼1ðTon;i þ Toff ;iÞiT 2N þPN
i¼1ðTon;i þ Toff ;iÞh i
T
þPNi¼1ðTon;i þ 2Toff ;i þ Tcold;iÞ
iT 22N þPN
i¼1ðTon;i þ 2Toff ;i þ Tcold;iÞh i
T

0 10 20 50 75 100 150 20060
80
100
120
140
160
180
200
N
Pro
port
ion
[%]
2.01%
1.83%
1.35%
1.42%
1.37%
1.31%
1.36%
1-bin3-bin2-bin
Fig. 1. Comparison of the tightness of the three MIQP formulations in terms of iGap.
738 L. Yang et al. / Applied Energy 187 (2017) 732–745
Fig. 1, our 2-bin formulation is tighter than the 3-bin one, and the3-bin formulation is tighter than the 1-bin one. Compared with thestate-of-the-art 3-bin formulation, the iGap values for our2-bin formulation are reduced by approximately 20%.
Now we compare the compactness of the three MIQP formula-tions. Table 5 presents a comparison of the original problemspassed to CPLEX for the three formulations. All of this informationcan be obtained by calling the methods whose names begin with‘‘getN” for objects of the Class ‘‘IloCplex” [34]. In Table 5, the col-umns ‘‘cons”, ‘‘nonzs”, and ‘‘vars” represent the numbers of con-straints, nonzeros, and variables, respectively, for thecorresponding problem. For ‘‘2-bin”, the columns ‘‘redu_con”,‘‘redu_noz”, and ‘‘redu_var” represent the percentage decreasesin the numbers of constraints, nonzeros, and variables, respec-tively, with respect to ‘‘3-bin”. The columns under the ‘‘1-bin”heading have similar meanings.
As seen in Table 5, our 2-bin model has the fewest constraintsand nonzeros among these three models, and it has fewer variablesthan the 3-bin model, although slightly more than the 1-bin model.In fact, the numbers of constraints and variables in these three
Table 5Comparison of the three original MIQP formulations in terms of compactness.
N 1-bin 3-bin
cons redu_con nonzs redu_noz vars redu_var cons non
10 3341 �51.31% 11,287 �16.10% 720 40.00% 2208 97220 6650 �52.24% 22,496 �17.43% 1440 40.00% 4368 19,50 16,635 �53.35% 56,490 �17.81% 3600 40.00% 10,848 47,75 25,593 �57.51% 87,032 �19.33% 5400 40.00% 16,248 72,100 35,570 �64.31% 121,009 �21.78% 7200 40.00% 21,648 99,150 53,271 �64.17% 181,195 �21.85% 10,800 40.00% 32,448 148200 64,421 �48.96% 219,324 �16.10% 14,400 40.00% 43,248 188
Table 6Comparison of the three reduced MIQP formulations in terms of compactness.
N 1-bin 3-bin
cons redu_con nonzs redu_noz vars redu_var cons non
10 1964 �38.70% 6003 �9.48% 581 24.15% 1416 54820 4278 �50.79% 13,379 �15.46% 1216 23.09% 2837 11,50 11,407 �56.78% 36,242 �18.96% 3167 22.72% 7276 30,75 17,878 �64.71% 57,011 �22.96% 4756 22.44% 10,854 46,100 24,740 �72.31% 78,590 �25.95% 6298 22.29% 14,358 62,150 36,729 �71.32% 116,471 �25.16% 9409 22.37% 21,439 93,200 43,894 �51.24% 140,631 �16.73% 12,728 22.60% 29,023 120
models can be calculated as specified in Tables 1 and 2 in Sec-tion 3.2, and the numbers of nonzeros can also be roughly calcu-lated according to Table 3 and the data for the test systems.
With the default settings, a solver such as CPLEX always prepro-cesses an optimization problem by simplifying the constraints,reducing the size of the problem, and eliminating redundanciesbefore solving it using a sophisticated ‘‘branch-and-cut” approach.Therefore, the more compact the reduced problem obtained afterpreprocessing is, the more efficiently the MIP problem can besolved by the solver. A comparison of the reduced problems forthe three formulations is presented in Table 6. All these resultsare reported by CPLEX and can be found in the CPLEX solution logs.The columns have the same meanings as the columns in Table 5.The results are seen to be more satisfactory than the results forthe original models. Except for the smallest case, the 2-bin modelhas the fewest constraints, nonzeros, and variables among all threereduced problems.
According to Table 6 and Fig. 1, compared with the 1-bin for-mulation, the 2-bin formulation is notably tighter and has nota-bly fewer constraints and nonzeros; in addition, it has slightlyfewer variables once the problem has been reduced. Moreover,compared with the 3-bin formulation, our 2-bin formulation istighter and notably more compact. In addition, a comparison ofTables 5 and 6 shows that although the original 2-bin modelhas more variables than the 1-bin model, CPLEX can reduce our2-bin model more efficiently; consequently, our reduced 2-binproblem is the problem with the fewest variables in mostinstances.
Since many continuous relaxation problems are repeatedlysolved during the process of solving an MIP problem, we comparethe solution results for the relaxations of the three MIQP formula-tions in Table 7. In this table, the column labeled ‘‘Ctime” representsthe execution time, the column labeled ‘‘redu_Ct” represents thepercentage decrease in execution time with respect to the 3-binmodel, and the column labeled ‘‘Nit” represents the total numberof iterations required to solve the current optimization. As seenin Table 7, for a more compact model, its relaxation can be solvedmore efficiently. In the ‘‘Nit” column, there is no notable differenceamong the three formulations. However, when ‘‘Ctime” and ‘‘Nit” areconsidered simultaneously, it is obvious that the 2-bin formulation
2-bin
zs vars cons redu_con nonzs redu_noz vars redu_var
2 1200 1728 21.74% 7024 27.75% 960 20.00%157 2400 3408 21.98% 13,530 29.37% 1920 20.00%950 6000 8448 22.12% 33,846 29.41% 4800 20.00%935 9000 12,648 22.16% 51,429 29.49% 7200 20.00%366 12,000 16,848 22.17% 69,955 29.60% 9600 20.00%,701 18,000 25,248 22.19% 104,673 29.61% 14,400 20.00%,911 24,000 33,648 22.20% 133,415 29.38% 19,200 20.00%
2-bin
zs vars cons redu_con nonzs redu_noz vars redu_var
3 766 1168 17.51% 4385 20.03% 592 22.72%588 1581 2353 17.06% 9478 18.21% 1209 23.53%466 4098 6021 17.25% 25,309 16.93% 3143 23.30%364 6132 8972 17.34% 38,852 16.20% 4716 23.09%397 8105 11,856 17.43% 52,385 16.05% 6248 22.91%055 12,120 17,688 17.50% 77,799 16.39% 9330 23.02%,472 16,444 24,031 17.20% 100,467 16.61% 12,630 23.19%

Table 7Comparison of the three MIQP formulations in terms of compactness based on the solving of relaxations.
N 1-bin 3-bin 2-bin
Ctime (ms) redu_Ct Nit Ctime (ms) Nit Ctime (ms) redu_Ct Nit
10 112 �89.83% 17 59 20 39 33.90% 1820 263 �97.74% 17 133 23 88 33.83% 2250 710 �75.74% 21 404 26 210 48.02% 2675 1640 �172.43% 23 602 28 356 40.86% 27100 2599 �181.58% 26 923 32 510 44.75% 28150 4048 �177.45% 27 1459 35 824 43.52% 31200 5193 �146.23% 29 2109 36 1128 46.51% 30
Table 8Comparison of the computational performance of the three MIQP models.
N 1-bin 3-bin 2-bin
Ctime
(s)redu_Ct Gap
(%)Nit_all Nodes Cuts Ctime
(s)Gap(%)
Nit_all Nodes Cuts Ctime
(s)redu_Ct Gap
(%)Nit_all Nodes Cuts
10 1.27 6.62% 0.40% 5810 38 238 1.36 0.44% 7930 65 258 0.24 82.35% 0.37% 1131 0 13820 95.11 �319.36% 0.47% 39,069 259 379 22.68 0.46% 40,471 319 512 0.90 96.03% 0.39% 2092 0 24550 10.70 18.51% 0.45% 9260 0 1109 13.13 0.44% 17,960 98 1368 4.26 67.56% 0.34% 5050 0 65175 29.48 48.50% 0.39% 14,810 0 1616 57.24 0.48% 62,871 374 2071 7.00 87.77% 0.34% 7238 0 912100 53.13 63.81% 0.38% 18,910 0 2039 146.82 0.45% 121,232 658 2461 30.20 79.43% 0.41% 39,546 228 1123150 367.70 �12.96% 0.39% 113,763 503 3019 325.51 0.44% 168,833 951 3650 93.4 71.31% 0.33% 82,902 456 1638200 352.24 45.06% 0.41% 83,255 320 4458 641.11 0.44% 215,886 1475 4896 232.42 63.75% 0.37% 94,474 555 2419
Table 9Numbers of various types of cuts for the three models.
N 1-bin 3-bin 2-bin
bound flow 0_half bound flow 0_half bound flow 0_half
10 55 28 5 153 16 7 48 12 720 100 85 5 331 56 3 102 19 150 310 254 13 904 143 0 73 88 075 445 393 19 1488 184 0 65 128 1100 569 506 27 1487 382 1 101 149 0150 821 768 42 2286 520 1 122 227 1200 1353 1095 54 2464 928 0 187 346 0
L. Yang et al. / Applied Energy 187 (2017) 732–745 739
is the fastest per iteration, followed by the 3-bin formulation, withthe most time-consuming one being the 1-bin formulation. Theseresults are in full agreement with the comparison of compactnesspresented in Table 6.
We directly solved the three MIQP models using CPLEX to 0.5%optimality, and the results are compared in Table 8. It should benoted that when fast response times are required in a given oper-ating environment, 0.5% is a very popular tolerance to specify forCPLEX to ensure that UC MIP models are solved within a reason-able execution time with reasonably satisfying suboptimalsolutions.
In Table 8, ‘‘Gap” represents the relative integrality gapreported by CPLEX at the end of solution process, ‘‘Nit_all” repre-sents the total number of iterations required to solve the noderelaxations during the current optimization, ‘‘Cuts” representsthe number of cuts generated by CPLEX to tighten the model,and ‘‘Nodes” represents the number of nodes visited while the sol-ver is building the enumeration tree during the solution process.According to Table 8, our 2-bin formulation clearly outperformsthe other two formulations in terms of the computation time.Moreover, we observe that the total number of iterations requiredto solve the 2-bin formulation is far less than that for the 3-bin for-mulation. One reason for this finding is that markedly fewer nodesneed to be visited and fewer cuts need to be added for the 2-binformulation during the branch-and-cut procedure. Moreover,according to the analysis of Table 7, the 2-bin formulation requiresless CPU time per iteration than the 3-bin formulation does, so thetotal time needed to solve the 2-bin formulation is far less than
that for the 3-bin formulation. This conclusion is perfectly consis-tent with the ‘‘Ctime” comparison presented in Table 8. A compar-ison of the 1-bin and 3-bin formulations reveals that CPLEXintroduced a comparable number of cuts for both models, and con-sequently, the number of iterations is predominantly determinedby the number of visited nodes. Table 8 shows that often, fewernodes are visited for the 1-bin model than for the 3-bin model,although the 3-bin model is tighter. Upon observing the solutionlogs closely, we found that the CPLEX heuristics often found morehigh-quality feasible solutions for the 1-bin model, thereby effec-tively reducing the MIP Gap value and consequently decreasingthe number of nodes that needed to be visited. Even so, however,because the 3-bin model is faster than the 1-bin model in eachiteration, the 1-bin formulation only outperforms the 3-bin formu-lation when the 1-bin model requires considerably fewer itera-tions than the 3-bin model does.
In addition, we have also detailed the numbers of cutting planesused for each formulation in Table 9. In this table, the columnslabeled ‘‘bound”, ‘‘flow”, and ‘‘0_half” represent the numbers of‘‘implied bound cuts”, ‘‘flow cuts”, and ‘‘zero-half cuts”, respec-tively. We chose these cuts because their numbers are notablyreduced for our 2-bin model.
4.2. Comparison of the three MILP formulations
According to Section 3.3, the three MIQP formulations can beapproximated as three corresponding MILP formulations, withL ¼ 6 for our experiments. The 43 randomly generated realistic
740 L. Yang et al. / Applied Energy 187 (2017) 732–745
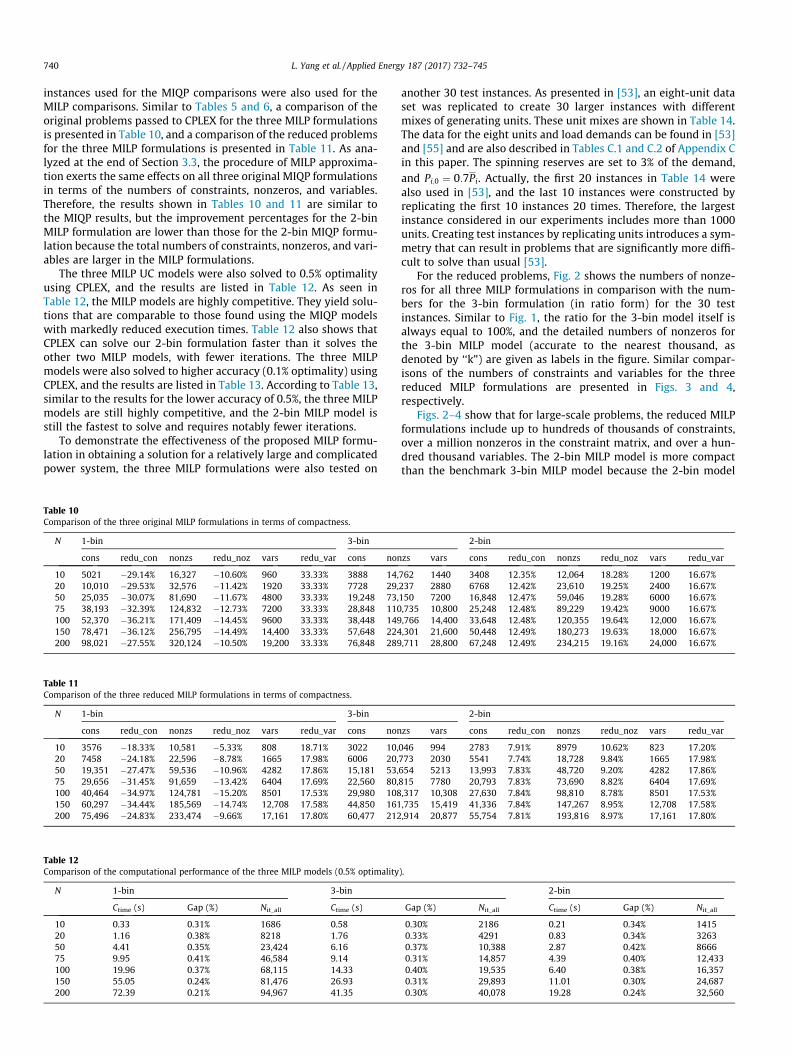
instances used for the MIQP comparisons were also used for theMILP comparisons. Similar to Tables 5 and 6, a comparison of theoriginal problems passed to CPLEX for the three MILP formulationsis presented in Table 10, and a comparison of the reduced problemsfor the three MILP formulations is presented in Table 11. As ana-lyzed at the end of Section 3.3, the procedure of MILP approxima-tion exerts the same effects on all three original MIQP formulationsin terms of the numbers of constraints, nonzeros, and variables.Therefore, the results shown in Tables 10 and 11 are similar tothe MIQP results, but the improvement percentages for the 2-binMILP formulation are lower than those for the 2-bin MIQP formu-lation because the total numbers of constraints, nonzeros, and vari-ables are larger in the MILP formulations.
The three MILP UC models were also solved to 0.5% optimalityusing CPLEX, and the results are listed in Table 12. As seen inTable 12, the MILP models are highly competitive. They yield solu-tions that are comparable to those found using the MIQP modelswith markedly reduced execution times. Table 12 also shows thatCPLEX can solve our 2-bin formulation faster than it solves theother two MILP models, with fewer iterations. The three MILPmodels were also solved to higher accuracy (0.1% optimality) usingCPLEX, and the results are listed in Table 13. According to Table 13,similar to the results for the lower accuracy of 0.5%, the three MILPmodels are still highly competitive, and the 2-bin MILP model isstill the fastest to solve and requires notably fewer iterations.
To demonstrate the effectiveness of the proposed MILP formu-lation in obtaining a solution for a relatively large and complicatedpower system, the three MILP formulations were also tested on
Table 10Comparison of the three original MILP formulations in terms of compactness.
N 1-bin 3-bin
cons redu_con nonzs redu_noz vars redu_var cons non
10 5021 �29.14% 16,327 �10.60% 960 33.33% 3888 14,20 10,010 �29.53% 32,576 �11.42% 1920 33.33% 7728 29,50 25,035 �30.07% 81,690 �11.67% 4800 33.33% 19,248 73,75 38,193 �32.39% 124,832 �12.73% 7200 33.33% 28,848 110100 52,370 �36.21% 171,409 �14.45% 9600 33.33% 38,448 149150 78,471 �36.12% 256,795 �14.49% 14,400 33.33% 57,648 224200 98,021 �27.55% 320,124 �10.50% 19,200 33.33% 76,848 289
Table 11Comparison of the three reduced MILP formulations in terms of compactness.
N 1-bin 3-bin
cons redu_con nonzs redu_noz vars redu_var cons non
10 3576 �18.33% 10,581 �5.33% 808 18.71% 3022 10,20 7458 �24.18% 22,596 �8.78% 1665 17.98% 6006 20,50 19,351 �27.47% 59,536 �10.96% 4282 17.86% 15,181 53,75 29,656 �31.45% 91,659 �13.42% 6404 17.69% 22,560 80,100 40,464 �34.97% 124,781 �15.20% 8501 17.53% 29,980 108150 60,297 �34.44% 185,569 �14.74% 12,708 17.58% 44,850 161200 75,496 �24.83% 233,474 �9.66% 17,161 17.80% 60,477 212
Table 12Comparison of the computational performance of the three MILP models (0.5% optimality
N 1-bin 3-bin
Ctime (s) Gap (%) Nit_all Ctime (s)
10 0.33 0.31% 1686 0.5820 1.16 0.38% 8218 1.7650 4.41 0.35% 23,424 6.1675 9.95 0.41% 46,584 9.14100 19.96 0.37% 68,115 14.33150 55.05 0.24% 81,476 26.93200 72.39 0.21% 94,967 41.35
another 30 test instances. As presented in [53], an eight-unit dataset was replicated to create 30 larger instances with differentmixes of generating units. These unit mixes are shown in Table 14.The data for the eight units and load demands can be found in [53]and [55] and are also described in Tables C.1 and C.2 of Appendix Cin this paper. The spinning reserves are set to 3% of the demand,and Pi;0 ¼ 0:7Pi. Actually, the first 20 instances in Table 14 werealso used in [53], and the last 10 instances were constructed byreplicating the first 10 instances 20 times. Therefore, the largestinstance considered in our experiments includes more than 1000units. Creating test instances by replicating units introduces a sym-metry that can result in problems that are significantly more diffi-cult to solve than usual [53].
For the reduced problems, Fig. 2 shows the numbers of nonze-ros for all three MILP formulations in comparison with the num-bers for the 3-bin formulation (in ratio form) for the 30 testinstances. Similar to Fig. 1, the ratio for the 3-bin model itself isalways equal to 100%, and the detailed numbers of nonzeros forthe 3-bin MILP model (accurate to the nearest thousand, asdenoted by ‘‘k”) are given as labels in the figure. Similar compar-isons of the numbers of constraints and variables for the threereduced MILP formulations are presented in Figs. 3 and 4,respectively.
Figs. 2–4 show that for large-scale problems, the reduced MILPformulations include up to hundreds of thousands of constraints,over a million nonzeros in the constraint matrix, and over a hun-dred thousand variables. The 2-bin MILP model is more compactthan the benchmark 3-bin MILP model because the 2-bin model
2-bin
zs vars cons redu_con nonzs redu_noz vars redu_var
762 1440 3408 12.35% 12,064 18.28% 1200 16.67%237 2880 6768 12.42% 23,610 19.25% 2400 16.67%150 7200 16,848 12.47% 59,046 19.28% 6000 16.67%,735 10,800 25,248 12.48% 89,229 19.42% 9000 16.67%,766 14,400 33,648 12.48% 120,355 19.64% 12,000 16.67%,301 21,600 50,448 12.49% 180,273 19.63% 18,000 16.67%,711 28,800 67,248 12.49% 234,215 19.16% 24,000 16.67%
2-bin
zs vars cons redu_con nonzs redu_noz vars redu_var
046 994 2783 7.91% 8979 10.62% 823 17.20%773 2030 5541 7.74% 18,728 9.84% 1665 17.98%654 5213 13,993 7.83% 48,720 9.20% 4282 17.86%815 7780 20,793 7.83% 73,690 8.82% 6404 17.69%,317 10,308 27,630 7.84% 98,810 8.78% 8501 17.53%,735 15,419 41,336 7.84% 147,267 8.95% 12,708 17.58%,914 20,877 55,754 7.81% 193,816 8.97% 17,161 17.80%
).
2-bin
Gap (%) Nit_all Ctime (s) Gap (%) Nit_all
0.30% 2186 0.21 0.34% 14150.33% 4291 0.83 0.34% 32630.37% 10,388 2.87 0.42% 86660.31% 14,857 4.39 0.40% 12,4330.40% 19,535 6.40 0.38% 16,3570.31% 29,893 11.01 0.30% 24,6870.30% 40,078 19.28 0.24% 32,560

Table 13Comparison of the computational performance of the three MILP models (0.1% optimality).
N 1-bin 3-bin 2-bin
Ctime (s) Gap (%) Nit_all Ctime (s) Gap (%) Nit_all Ctime (s) Gap (%) Nit_all
10 1.16 0.080% 6462 1.23 0.082% 5847 0.84 0.071% 411520 17.99 0.099% 66,899 14.78 0.097% 51,058 11.50 0.089% 54,42850 68.13 0.098% 132,677 46.75 0.091% 92,079 27.84 0.084% 53,45775 103.96 0.098% 177,556 65.04 0.090% 82,964 23.37 0.094% 41,831100 105.00 0.098% 160,010 88.16 0.088% 83,602 41.81 0.092% 68,109150 75.10 0.093% 86,491 130.67 0.080% 102,891 27.09 0.081% 34,372200 158.05 0.088% 111,425 180.44 0.084% 111,660 51.37 0.090% 48,907
Table 14Number of units in each problem instance.
No. Unit Total Units No. Unit Total Units
1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8
1 12 11 0 0 1 4 0 0 28 16 50 59 8 15 1 18 4 17 1722 13 15 2 0 4 0 0 1 35 17 53 50 17 15 16 5 14 12 1823 15 13 2 6 3 1 1 3 44 18 45 57 19 7 19 19 5 11 1824 15 11 0 1 4 5 6 3 45 19 58 50 15 7 16 18 7 12 1835 15 13 3 7 5 3 2 1 49 20 55 48 18 5 18 17 15 11 1876 10 10 2 5 7 5 6 5 50 21 240 220 0 0 20 80 0 0 5607 17 16 1 3 1 7 2 4 51 22 260 300 40 0 80 0 0 20 7008 17 10 6 5 2 1 3 7 51 23 300 260 40 120 60 20 20 60 8809 12 17 4 7 5 2 0 5 52 24 300 220 0 20 80 100 120 60 90010 13 12 5 7 2 5 4 6 54 25 300 260 60 140 100 60 40 20 98011 46 45 8 0 5 0 12 16 132 26 200 200 40 100 140 100 120 100 100012 40 54 14 8 3 15 9 13 156 27 340 320 20 60 20 140 40 80 102013 50 41 19 11 4 4 12 15 156 28 340 200 120 100 40 20 60 140 102014 51 58 17 19 16 1 2 1 165 29 240 340 80 140 100 40 0 100 104015 43 46 17 15 13 15 6 12 167 30 260 240 100 140 40 100 80 120 1080
1 3 5 7 9 11 13 15 17 19 21 23 25 27 2975
80
85
90
95
100
105
110
Instance [#]
Pro
port
ion
[%] 40k
50k
60k
63k
67k
67k
69k
68k
70k
74k
185k
218k
217k
236k
233k
240k
255k
255k
256k
261k
807k
1010k
1241k
1253k
1381k
1367k
1429k
1407k
1452k
1482k
1-bin3-bin2-bin
Fig. 2. Comparison of the three reduced MILP formulations in terms of the numberof nonzeros.
1 3 5 7 9 11 13 15 17 19 21 23 25 27 2980
90
100
110
120
130
140
Instance [#]
Pro
port
ion
[%]
10k
12k
15k
16k
17k
17k
18k
18k
18k
19k
46k
55k
55k
57k
58k
60k
64k
64k
64k
66k
195k
243k
307k
316k
342k
352k
357k
358k
363k
380k
1-bin
3-bin2-bin
Fig. 3. Comparison of the three reduced MILP formulations in terms of the numberof constraints.
L. Yang et al. / Applied Energy 187 (2017) 732–745 741
contains almost 20% fewer nonzeros, >10% fewer constraints, andapproximately 22% fewer variables. Although there are a few morevariables in the 2-bin MILP model than in the 1-bin model (by nomore than 10%), the 2-bin MILP model is more compact than the1-bin model because its number of nonzeros and constraints aresignificantly reduced, i.e., it contains approximately 25% fewernonzeros and approximately 45% fewer constraints. In addition,the improvements achieved in the reduced 2-bin MILP formulationfor these 30 test instances are superior to those for the 43 ran-domly generated realistic instances (compare Figs. 2–4 with the‘‘3-bin” and ‘‘2-bin” columns in Table 11). The main reason for thisfinding is that Ccold;i ¼ Chot;i for most of the 43 random instances,
whereas Ccold;i > Chot;i for all 30 instances in Table 14. When
Ccold;i ¼ Chot;i, according to (35) and (36), we have eSi;t ¼ 0. Thismeans that no effective improvement is achieved for the startupcost constraints in the 2-bin model.
For all 30 instances, the three MILP models were solved to 0.5%optimality using CPLEX. The results are listed in Table 15, and acomparison of the CPU times for the three MILP models is shownin Fig. 5. As seen in Table 15, for 23 of the 30 instances, the 2-binMILP model requires the fewest nodes to be visited to find accept-able solutions, whereas the 3-bin model and the 1-bin modelrequire the fewest nodes to be visited in 16 and 17 instances,respectively. Moreover, for 15 instances, the 2-bin MILP model

1 3 5 7 9 11 13 15 17 19 21 23 25 27 2965
70
75
80
85
90
95
100
105
110
Instance [#]
Pro
port
ion
[%]
4k
4k
5k
6k
6k
6k
6k
6k
6k
7k
17k
20k
20k
21k
21k
22k
23k
23k
23k
24k
70k
88k
111k
115k
124k
128k
130k
130k
132k
138k
1-bin
3-bin2-bin
Fig. 4. Comparison of the three reduced MILP formulations in terms of the numberof variables.
1 3 5 7 9 11 13 15 17 19 21 23 25 27 290
50
100
150
200
250
300
Instance [#]
Pro
port
ion
[%]
3.0"
4.3"
13"
8"
30"
5"
10"
13"
35"
16"
1'23"
20"
4'32"
4'49"
1'9"
1'53"
5'13"
2'39"
1'23"
5'2"
20'42"
1h13'
24'31"
2h34'
4h27'
2h34'
23'24"
3h7'
3h48'
1h22'
1'39"
1-bin
3-bin
2-bin
Fig. 5. Comparison of the three reduced MILP models in terms of CPU time.
742 L. Yang et al. / Applied Energy 187 (2017) 732–745
requires the fewest iterations to converge to the preset tolerance;the 3-bin model requires the fewest iterations in 12 instances,whereas the 1-bin model requires the fewest iterations in only 3.Fig. 5 shows that the 2-bin MILP model consumes the least CPUtime in 26 of the 30 instances, requires more CPU time than the3-bin model in only 2 instances, and requires more CPU time thanthe 1-bin model in another 2 instances. Table 15 and Fig. 5 demon-strate that our 2-bin formulation is efficient and suitable for com-plicated, large-scale instances.
Table 15Computational performance of the three MILP models for the 30 instances in Table 14.
No. 1-bin 3-bin
Ctime (s) Gap (%) Nit_all Nodes Ctime (s) Gap (%)
1 6.43 0.48% 3070 0 3.04 0.33%2 11.90 0.48% 4005 0 4.32 0.41%3 21.88 0.49% 5021 0 12.69 0.22%4 10.75 0.48% 3459 0 7.99 0.11%5 44.72 0.49% 70,313 222 30.15 0.24%6 18.65 0.37% 32,376 0 4.95 0.46%7 12.28 0.50% 5193 0 10.43 0.39%8 24.60 0.39% 5929 0 12.86 0.16%9 33.01 0.48% 25,140 57 34.92 0.43%10 23.22 0.31% 5678 0 16.48 0.24%11 26.56 0.43% 10,281 0 82.59 0.32%12 43.35 0.33% 16,796 0 19.77 0.30%13 43.41 0.45% 8173 0 211.59 0.32%14 212.00 0.37% 84,861 263 229.25 0.25%15 164.36 0.42% 109,688 160 69.03 0.21%16 49.69 0.33% 19,303 0 53.07 0.22%17 153.82 0.28% 97,587 51 312.45 0.21%18 279.15 0.35% 193,839 341 99.20 0.26%19 134.97 0.44% 32,818 19 82.83 0.18%20 203.56 0.45% 179,643 194 302.39 0.30%21 1764.29 0.25% 1,790,327 1309 1181.65 0.43%22 4026.18 0.47% 4,554,896 2079 4399.09 0.21%23 2744.86 0.44% 236,564 65 1410.76 0.38%24 727.18 0.39% 89,245 0 5568.06 0.32%25 13919.65 0.20% 4,099,874 1236 16045.19 0.22%26 2377.20 0.47% 825,898 271 5559.45 0.43%27 1315.39 0.44% 89,287 0 1404.12 0.17%28 5300.52 0.25% 1,963,521 1203 11139.54 0.27%29 9011.19 0.44% 1,838,341 626 10086.36 0.22%30 8302.65 0.29% 2,358,255 1192 4936.99 0.46%
5. Conclusion
This paper develops a novel projected 2-bin formulation for theUC problem in power systems. By projecting the generation level ofeach unit onto the interval ½0;1�, a new compact and tight UC for-mulation can be obtained with only two sets of binary variables.We compare the performance of our novel 2-bin formulation withthe performances of two other state-of-the-art UC formulations.The test results indicate that the proposed formulation performssignificantly better in terms of solution time.
2-bin
Nit_all Nodes Ctime (s) Gap (%) Nit_all Nodes
1907 0 1.87 0.45% 2473 02832 0 2.70 0.45% 1863 04376 0 7.60 0.22% 4230 03105 0 2.92 0.35% 2453 057,029 258 3.76 0.43% 1494 02300 0 5.84 0.38% 4899 04246 0 3.84 0.26% 3547 05082 0 11.93 0.20% 5369 056,160 173 13.00 0.21% 6483 05193 0 12.39 0.40% 6039 0112,060 445 11.32 0.37% 7443 02917 0 16.82 0.31% 7916 0208,420 289 34.95 0.20% 9864 0165,969 195 25.73 0.39% 8287 014,097 0 54.86 0.17% 15,126 011,801 0 35.39 0.18% 17,693 0315,282 139 141.36 0.41% 151,578 47316,034 0 37.62 0.42% 14,032 014,437 0 16.18 0.47% 5976 0303,213 968 59.37 0.12% 20,622 0886,134 283 673.90 0.20% 758,589 11362,349,373 1124 99.75 0.47% 7946 073,646 0 5190.27 0.13% 1,599,122 3032,443,850 1258 1081.96 0.13% 400,315 784,012,309 1272 11584.04 0.49% 4,730,791 2605902,950 1287 1412.54 0.14% 173,063 080,847 0 1116.33 0.11% 962,432 3656,202,836 2564 3461.59 0.32% 1,284,120 14401,351,372 1353 9098.10 0.35% 2,333,452 502935,285 479 3775.95 0.29% 1,121,985 393

L. Yang et al. / Applied Energy 187 (2017) 732–745 743
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (51407037, 61661004, and 61462006),the Natural Science Foundation of Guangxi Province ofChina (2013GXNSFBA019246, 2016GXNSFDA380019, and2014GXNSFFA118001), the Guangxi Key Laboratory of PowerSystem Optimization and Energy Technology Foundation(15-A-01-11), the Chinese Scholarship Council Grant201408455058, the Hunan Province 100 Talent Program Fund,and the 2015 Science and Technology Project of China SouthernPower Grid (WYKJ00000027).
Table B.2Five linearly independent points in Ui;t :.
Appendix A. Tightness of the 2-bin objective function
We substitute (22) into f iðPi;tÞ and note that ui;tePi;t 6 ePi;t and
ðui;tÞ2 6 ui;t for 0 6 ui;t 6 1, thereby obtaining the following:
aiui;t þ biPi;t þ ciðPi;tÞ2 ¼ aiui;t þ biPiui;t þ ciðui;tÞ2ðPiÞ2 þ biðPi
� PiÞePi;t þ 2ciPiðPi � PiÞui;tePi;t
þ ciðPi � PiÞ2ðePi;tÞ2
6 ðai þ biPi þ ciðPiÞ2Þui;t þ ½ðPi � PiÞðbi
þ 2ciPiÞ�ePi;t þ ciðPi � PiÞ2ðePi;tÞ2;
i.e., aiui;t þ biPi;t þ ciðPi;tÞ2 6 ~aiui;t þ ~biePi;t þ ~ciðePi;tÞ
2.
We note that when ui;t 2 f0;1g, we have ui;tePi;t ¼ ePi;t and
ðui;tÞ2 ¼ ui;t . Thus, aiui;t þ biPi;t þ ciðPi;tÞ2 ¼ ~aiui;t þ ~biePi;t þ ~ciðePi;tÞ
2.
Meanwhile, when 0 < ui;t < 1 and ePi;t > 0, we have ui;tePi;t < ePi;t
and ðui;tÞ2 < ui;t . Thus, aiui;t þbiPi;t þciðPi;tÞ2 < ~aiui;t þ ~biePi;t þ~ciðePi;tÞ
2.
Table B.3Five affinely independent points in Ui;t :.
Point ePi;t�1ePi;t
ui;t�1 ui;t si;t
~u1i;t
0 0 0 0 0
~u2i;t
0 ePstart;i0 1 1
~u3i;t
0 0 1 0 0
~u4i;t
0 ePup;i1 1 0
~u5i;t 1� ePup;i
1 1 1 0
Point ePi;t�1ePi;t
ui;t�1 ui;t si;t
u1i;t
0 0 0 1 1
u2i;t
0 0 1 0 0
u3i;t
0 p1 1 1 0
u4i;t
1� p2 1 1 1 0
u5i;t
p p þ p3 1 1 0
Appendix B. Proof of facet definition for ramp rate limits
First, we present the proof that (31) is facet-defining for thetwo-period ramp-up polytope.
Considering the physical interpretations of the ramp-up con-
straints, we analyze the values of ePi;t � ePi;t�1 in an arbitrary integer
feasible solution. We can see that ePi;t � ePi;t�1 can be bounded fromabove based on the values of ui;t�1 and ui;t (si;t can be determinedfrom the given ui;t�1 and ui;t), as illustrated in Table B.1.
From the last column in Table B.1 we see that (31) is a validramp-up expression for UC. Moreover, it is the strongest possibleinequality because it attains the upper bound on the left-hand side(LHS) as its RHS for all possible feasible values of ui;t�1 and ui;t .
We use u i;t to denote ðePi;t�1; ePi;t ;ui;t�1;ui;t ; si;tÞ 2 R2þ � f0;1g3;
then, following Eq. (1) in [59], for t 2 ½2; T�, we define the 2-bintwo-period ramp-up feasible set, including the production limits(23), the state constraints (26), si;t 6 1� ui;t�1, si;t 6 ui;t , and theramp-up constraints (31) for unit i, i.e.,
Table B.1Illustration of two-period ramp-up inequalities.
ui;t�1 ui;t si;t ePi;t � ePi;t�1 UBðePi;t � ePi;t�1Þ RHS (31)
0 1 1 ePi;tePstart;i
ePstart;i
1 1 0 ePi;t � ePi;t�1ePup;i
ePup;i
0 0 0 0 0 01 0 0 �ePi;t�1
0 0
(UBð�Þ denotes the upper bound on ‘‘�”; RHS denotes the right-hand side)
Ui;t ¼ u
ePi;t 6 ui;t
ui;t � ui;t�1 6 si;t
si;t 6 1� ui;t�1
si;t 6 ui;tePi;t � ePi;t�1 6 ui;tePup;i þ si;tðePstart;i � ePup;iÞ
ui;t�1;ui;t ; si;t 2 f0;1g
�����������������
8>>>>>>>>>>><>>>>>>>>>>>:
9>>>>>>>>>>>=>>>>>>>>>>>;Then, the 2-bin two-period ramp-up polytope is the convex hull
of Ui;t , i.e., convðUi;tÞ. We note that the state constraintssi;t 6 1� ui;t�1 and si;t 6 ui;t are implied by the minimum up/downtime constraints (13) and (33).
We construct five points in Ui;t , as listed in Table B.2. When
pj 2 ð0; ePup;iÞ; j ¼ 1;2;3, denotes pairwise comparisons of real num-
bers with unequal values and p 2 ð0;1� p2Þ,we can verify that u1i;t ,
u2i;t , u
3i;t , u
4i;t , and u5
i;t are linearly independent. Then, the ramp-uppolytope convðUi;tÞ is full-dimensional.
Now, we construct another five points in Ui;t, as listed inTable B.3. According to (27), (29), and the physical interpretation
of the ramp-up constraints, we have 0 < ePup;i < 1 and
0 6 ePstart;i 6 1. Consequently, these five points are affinely inde-pendent because eu2
i;t � eu1i;t , eu3
i;t � eu1i;t , eu4
i;t � eu1i;t , and eu5
i;t � eu1i;t are
linearly independent. Therefore, (31) defines a facet of convðUi;tÞ.Similarly, for t 2 ½2; T�, we define our 2-bin two-period ramp-
down feasible set for unit i as
Table B.4Five affinely independent points in Di;t .
Point ePi;t�1ePi;t
ui;t�1 ui;t si;t
�u1i;t
0 0 0 0 0
�u2i;t
0 0 0 1 1
�u3i;t
ePshut;i0 1 0 0
�u4i;t
ePdown;i0 1 1 0
�u5i;t
1 1� ePdown;i1 1 0

Table C.1Load demands (% of total capacity).
Time 1 2 3 4 5 6 7 8 9 10 11 12
Demand 71% 65% 62% 60% 58% 58% 60% 64% 73% 80% 82% 83%Time 13 14 15 16 17 18 19 20 21 22 23 24Demand 82% 80% 79% 79% 83% 91% 90% 88% 85% 84% 79% 74%
Table C.2Generating unit data.
Gen Pi Pi ai bi ci Ton;i Toff ;i Chot;i Ccold;i Tcold;i Ti;0
(MW) (MW) ($/h) ($/MW h) ($/MW2h) (h) (h) ($/h) ($/h) (h) (h)
1 455 150 1000 16.19 0.00048 8 8 4500 9000 5 82 455 150 970 17.26 0.00031 8 8 5000 10,000 5 83 130 20 700 16.60 0.00200 5 5 550 1100 4 54 130 20 680 16.50 0.00211 5 5 560 1120 4 55 162 25 450 19.70 0.00398 6 6 900 1800 4 66 80 20 370 22.26 0.00712 3 3 170 340 2 37 85 25 480 27.74 0.00079 3 3 260 520 2 38 55 10 660 25.92 0.00413 1 1 30 60 0 1
744 L. Yang et al. / Applied Energy 187 (2017) 732–745
Di;t ¼ u i;t
ePi;t 6 ui;t
ui;t � ui;t�1 6 si;tsi;t 6 1� ui;t�1
si;t 6 ui;tePi;t�1 � ePi;t 6 ui;t�1ePshut;i þ ðsi;t � ui;tÞðePshut;i � ePdown;iÞ
ui;t�1;ui;t ; si;t 2 f0;1g
���������������
8>>>>>>>>><>>>>>>>>>:
9>>>>>>>>>=>>>>>>>>>;Then, (32) can be proven to be facet-defining for the two-period
ramp-down polytope convðDi;tÞ, which is full-dimensional, by con-structing five affinely independent points in Di;t , as listed inTable B.4.
Appendix C. Eight-unit data set
See Tables C.1 and C.2.
References
[1] Saravanan B, Das S, Sikri S, Kothari DP. A solution to the unit commitmentproblem – a review. Front. Energy 2013;7(2):223–36.
[2] Shahidehpour M, Yamin H, Li Z. Market operations in electric power systems:forecasting, scheduling, and risk management. New York: Wiley-IEEE Press;2002.
[3] Niknam T, Khodaei A, Fallahi F. A new decomposition approach for the thermalunit commitment problem. Appl Energy 2009;86:1667–74.
[4] Dionisios KD, Pavlos SG. A new memetic algorithm approach for the pricebased unit commitment problem. Appl Energy 2011;88:4687–99.
[5] Zheng JH, Wu QH, Jing ZX. Coordinated scheduling strategy to optimizeconflicting benefits for daily operation of integrated electricity and gasnetworks. Appl Energy 2016. doi: http://dx.doi.org/10.1016/j.apenergy.2016.08.146.
[6] Rasoul A-A, Faranak G, Hoay BG, Jeremy L, Farhad B, Vladimir T. Correctiveeconomic dispatch and operational cycles for probabilistic unit commitmentwith demand response and high wind power. Appl Energy 2016;182:634–51.
[7] Deane JP, Drayton G, Gallachóir BPÓ. The impact of sub-hourly modelling inpower systems with significant levels of renewable generation. Appl Energy2014;113:152–8.
[8] Brouwer AS, Broek MVD, Seebregts A, Faaij A. Operational flexibility andeconomics of power plants in future low-carbon power systems. Appl Energy2016;156:107–28.
[9] Razeghi G, Brouwer J, Samuelsen S. A spatially and temporally resolved modelof the electricity grid–economic vs environmental dispatch. Appl Energy2016;178:540–56.
[10] Osório GJ, Rodrigues EMG, Lujano-Rojas JM, Matias JCO, Catalão JPS. Newcontrol strategy for the weekly scheduling of insular power systems with abattery energy storage system. Appl Energy 2015;154:459–70.
[11] Haque ANMM, Ibn SAUN, Nguyen PH, Torbaghan SS. Exploration of dispatchmodel integrating wind generators and electric vehicles. Appl Energy2016;183:1441–51.
[12] He LF, Yang J, Yan J, Tang Yufei, He HB. A bi-layer optimization based temporaland spatial scheduling for large-scale electric vehicles. Appl Energy2016;168:179–92.
[13] Delarue E, D’haeseleer W. Adaptive mixed-integer programming unitcommitment strategy for determining the value of forecasting. Appl Energy2008;85:171–81.
[14] Jeong YW, Park JB, Jang SH, Lee KY. A New quantum-inspired binary PSO:application to unit commitment problems for power systems. IEEE TransPower Syst 2010;25(3):1486–95.
[15] Saber AY, Senjyu T, Yona A, Funabashi T. Unit commitment computation byfuzzy adaptive particle swarm optimization. IET Proc Gener Trans Distrib2007;1(3):456–65.
[16] Arroyo JM, Conejo AJ. A parallel repair genetic algorithm to solve the unitcommitment problem. IEEE Trans Power Syst 2002;17(4):1216–24.
[17] Chung CY, Yu H, Wong KP. An advanced quantum-inspired evolutionaryalgorithm for unit commitment. IEEE Trans Power Syst 2011;26(2):847–54.
[18] Chariklia AG, Kyriakos CG. Metamodel-assisted evolutionary algorithms forthe unit commitment problem with probabilistic outages. Appl Energy2010;87:1782–92.
[19] Chariklia AG, Kyriakos CG. Two-level, two-objective evolutionary algorithmsfor solving unit commitment problems. Appl Energy 2009;86:1229–39.
[20] Simopoulos DN, Kavatza SD, Vournas CD. Unit commitment by an enhancedsimulated annealing algorithm. IEEE Trans Power Syst 2006;21(1):68–76.
[21] Wu J, Zhu J, Chen G, Zhang H. A hybrid method for optimal scheduling of short-term electric power generation of cascaded hydroelectric plants based onparticle swarm optimization and chance-constrained programming. IEEETrans Power Syst 2008;23(4):1570–9.
[22] Senjyu T, Shimabukuro K, Uezato K, Funabashi T. A fast technique for unitcommitment problem by extended priority list. IEEE Trans Power Syst 2003;8(2):882–8.
[23] Su CC, Hsu YY. Fuzzy dynamic programming: an application to unitcommitment. IEEE Trans Power Syst 2003;6(3):1231–7.
[24] Ongsakul W, Petcharaks N. Unit commitment by enhanced adaptiveLagrangian relaxation. IEEE Trans Power Syst 2004;19(1):620–8.
[25] Rodrigo FL, Quintana VH. Medium-term hydrothermal coordination bysemidefinite programming. IEEE Trans Power Syst 2003;18(4):1515–22.
[26] Yang LF, Jian JB, Zhu YN, Dong ZY. Tight relaxation method for unitcommitment problem using reformulation and lift-and-project. IEEE TransPower Syst 2015;30(1):13–23.
[27] Quan R, Jian JB, Mu YD. Tighter relaxation method for unit commitment basedon second-order cone programming and valid inequalities. Int J Electr PowerEnergy Syst 2014;55:82–90.
[28] Chen CL, Wang SC. Branch-and-bound scheduling for thermal generating units.IEEE Trans Energy Convers 1993;8(3):184–9.
[29] Ruiz JP, Wang J, Liu C, Sun G. Outer-approximation method for securityconstrained unit commitment. IET Gener Trans Distrib 2013;7(11):1210–8.
[30] Yang LF, Jian JB, Dong ZY, Tang CM. Multi-cuts outer approximation method forunit commitment. IEEE Trans Power Syst. doi:http://dx.doi.org/10.1109/TPWRS.2016.2584862.
[31] Francisco T, Grossmann IE. Review of mixed-integer nonlinear and generalizeddisjunctive programming methods. Chem Ing Tech 2014;86(7):991–1012.
[32] Günlük O, Linderoth J. Perspective reformulations of mixed integer nonlinearprograms with indicator variables. Math Program 2010;124:183–205.

L. Yang et al. / Applied Energy 187 (2017) 732–745 745
[33] Wosely L. Integer programming. New York, NY, USA: Wiley; 1998.[34] <http://www-01.ibm.com/support/knowledgecenter/SSSA5P_12.6.2/ilog.
odms.cplex.help/CPLEX/homepages/CPLEX.html?lang=en>.[35] Koch T, Achterberg T, Andersen E, Bastert O, Berthold T, Bixby RE, et al. MIPLIB
2010. Math Program Comp 2011;3(2):103–63.[36] Ott AL. Evolution of computing requirements in the PJM market: past and
future. IEEE Power and Energy Society General Meeting, vol. 1. p. 1–4.[37] Frangion A, Gentile C, Lacalandra F. Sequential Lagrangian-MILP approaches
for unit commitment problems. Int J Elect Power Energy Syst 2011;33(3):585–93.
[38] Frangioni A, Gentile C. A computational comparison of reformulations of theperspective relaxation: SOCP vs. cutting planes. Oper Res Lett 2009;37(3):206–10.
[39] Carrión M, Arroyo JM. A computationally efficient mixed-integer linearformulation for the thermal unit commitment problem. IEEE Trans. PowerSyst 2006;21(3):1371–8.
[40] Frangioni A, Gentile C, Lacalandra F. Tighter approximated MILP formulationsfor unit commitment problems. IEEE Trans Power Syst 2009;24(1):105–13.
[41] Jabr RA. Tight polyhedral approximation for mixed-integer linearprogramming unit commitment formulations. IET Gener Trans Distrib2012;6(11):1104–11.
[42] Hawkes AD, Leach MA. Modelling high level system design and unitcommitment for a microgrid. Appl Energy 2009;86:1253–65.
[43] Zhang JP, Wu QH, Guo CG, Zhou XX. Economic dispatch with non-smoothobjectives—part I: local minimum analysis. IEEE Trans Power Syst 2014;30(2):710–21.
[44] Wang J, Botterud A, Bessa R, Keko H, Carvalho L, Issicaba D, et al. Wind powerforecasting uncertainty and unit commitment. Appl Energy 2011;88:4014–23.
[45] Wang JD, Wang JH, Liu C, Ruiz JP. Stochastic unit commitment with sub-hourlydispatch constraints. Appl Energy 2013;105:418–22.
[46] Bouffard F, Galiana F, Conejo A. Market-clearing with stochastic security-partI: formulation. IEEE Trans Power Syst 2005;20(4):1818–26.
[47] Hedman K, Ferris M, O’Neill R, Fisher E, Oren S. Cooptimization of generationunit commitment and transmission switching with n-1 reliability. IEEE TransPower Syst 2010;25(2):1052–63.
[48] Xu Y, Dong ZY, Zhang R, Xue Y, Hill DJ. A decomposition-based practicalapproach to transient stability-constrained unit commitment. IEEE TransPower Syst 2015;30(3):1455–64.
[49] Wolsey L. Strong formulations for mixed integer programs: valid inequalitiesand extended formulations. Math Program 2003;97(1):423–47.
[50] Bixby RE. Solving real-world linear programs: a decade and more of progress.Oper Res 2002;50(1):3–15.
[51] Garver LL. Power generation scheduling by integer programming-development of theory. Trans Am Inst Electr Eng Part III Power Ap Syst1962;81(3):730–4.
[52] Li T, Shahidehpour M. Price-based unit commitment: a case of Lagrangianrelaxation versus mixed integer programming. IEEE Trans Power Syst 2005;20(4):2015–25.
[53] Ostrowski J, Anjos MF, Vannelli A. Tight mixed integer linear programmingformulations for the unit commitment problem. IEEE Trans Power Syst2012;27(1):39–46.
[54] Rajan D, Takrit S. Minimum up/down polytopes of the unit commitmentproblem with start-up costs. IBM research report 2005.
[55] Morales-Espana G, Latorre JM, Ramos A. Tight and compact MILP formulationfor the thermal unit commitment problem. IEEE Trans Power Syst 2013;28(4):4897–908.
[56] Takrit S, Krasenbrink B, Wu LS. Incorporating fuel constraints and electricityspot prices into the stochastic unit commitment problem. Oper Res 2000;48(2):268–80.
[57] Arroyo JM, Conejo AJ. Optimal response of a thermal unit to an electricity spotmarket. IEEE Trans Power Syst 2000;15(3):1098–104.
[58] Jiang R, Guan Y, Watson JP. Cutting planes for the multi-stage stochastic unitcommitment problem. Math Prog 2016;157(1):121–51.
[59] Damci-Kurt P, Küçükyavuz S, Rajan D, Atamtürk A. A polyhedral study ofproduction ramping. Math Prog 2016. doi: http://dx.doi.org/10.1007/s10107-015-0919-9.
[60] Atakan S, Lulli G, Sen S. An improved MIP formulation for the unitcommitment problems. Available: <http://www.optimization-online.org/DB_HTML/2015/09/5083.html>.
[61] Bixby R, Fenelon M, Gu Z, Rothberg E, Wunderling R. MIP: theory and practice–closing the gap. In: Powell MJD, Scholtes S, editors. System modelling andoptimization: methods, theory and applications, vol. 174. Boston: KluwerAcademic Publishers; 2000. p. 19–49.
[62] Savelsbergh M. Preprocessing and probing for mixed integer programmingproblems. ORSA J Comput 1994;6(4):445–54.
[63] CPLEX Performance Tuning for Mixed Integer Programs. <http://www-01.ibm.com/support/docview.wss?uid=swg21400023>.
[64] Test Instances for Unit Commitment. <http://www.di.unipi.it/optimize/Data/UC.html>.