a new multiobjective genetic programming for extraction …/file/... · · 2013-07-18a new...
TRANSCRIPT

A New Multiobjective Genetic Programmingfor Extraction of Design Information
from Non-dominated Solutions
Tomoaki Tatsukawa
Taku Nonomura
Akira Oyama
Kozo Fujii
ISAS/JAXA, Japan
ISAS/JAXA, Japan
ISAS/JAXA, Japan
ISAS/JAXA, Japan

BackgroundPage. 2
Problem Setting
Multi-objective optimization
Data mining methods
Extraction of design knowledge
© Mitsubishi Heavy Industries, LTD.
Mitsubishi Regional Jet (MRJ)
LE-X
Multi-Objective Design Exploration(MODE)Obayashi, et.al. , “Multi-Objective Design Exploration for Aerodynamic Configurations” , 2005

Multi-Objective Design Exploration- Problem setting -
■ Design paramters
Kink position (x, y)
■ Objective functions
1. Drag to be minimized (M=2.0, AOA = 0)
2. Maximum L/D to be maximized
at subsonic condition (M=0.8)
3. Maximum L/D to be maximized
at supersonic condition (M=2.0)
4. Body volume to be maximized
Page. 3
Ascent phase
Return phase
Lift-off
Nose-entry
Vertical landing
3.33
1.0x
yKink position(x,y)
CLCD
CA
0 [deg]
90 [deg]
A.O.A.
Ascent phase Return phase

Page. 4
Multi-Objective Design Exploration- Multi-objective optimization & Data mining -
Problem Setting
Data mining methods
Extraction of design knowledge
・ It is difficult to reveal non-linear relationship (sin(x1), x1x2, x1/x2)between parameters
Genetic programming is one of the evolutionary technique to reveal non-linear relationship.
Volume
Normalized
0.2,)/( MMAXDL
8.0,)/( MMAXDL
0,0.2, AOAMAC
x
y
Scatter plot matrix with correlation coefficient
Multi-objective optimization

Objective
Page. 5
• Present a new data mining method for MODE to extract design information from non-dominated solutions
Approach– Multi-objective GP(MOGP) for MODE is introduced – MOGP is applied to the practical multi-objective
optimization problem of reusable launch vehicle

Page. 6
About Genetic Programming• Extension of Genetic Algorithm(GA) (Koza, 1990)
sin
1x 2x 3)sin( 1x 23x
1.0 4.2 3.0
1x 2x 3x
GA (Array) GP(Tree expression)
x
6.28 x
X
sin
X
x
10
x
+
X
x
x
X
X
x
• Genetic operatorsCrossover
x
6.28 x
X
sin
X
x
6.28 x
X
cos
X
Mutation
• Genome expression of GP is different from GA

Genetic Programming in MODEPage. 7
Problem Setting
Multi-objective optimization
Data mining methods
Extraction of design knowledge 2. The measure of complexity
Minimization of the number of nodes
1. The measure of accuracyMaximization of correlation coefficient
2x 3
Function nodeTerminal node The number of node = 3
■ Objective functions
GP is used as symbolic regression technique
- Extract effective non-linear terms- Give us hint of unknown new parameters

Page. 8
Proposed GP
Maximization of squared correlation coefficient
max
)ˆˆ()(
)ˆ)(()ˆ,(
2
22
,
,12
ffff
ffffffCor
jiji
jiji
N
j
i
We want to extract “x” as design information
Proposed MOGP- Measurement of Accuracy-
Mi ,...,2,1

Proposed MOGP- Objective Function -
Page. 9
MOGPGP
1) Maximization of correlation coefficient between obji2) Minimization of the number of nodes
1) Maximization of squared correlation coefficient between obj12) Maximization of squared correlation coefficient between obj2
N) Maximization of squared correlation coefficient between objNN+1) Minimization of the number of nodes
obji : ith objective function of MOO
1
1
obj1
obj20
New parameter?
1
obj1
Node
Length
0
1
obj2
0Node
Length

Symbolic Regression Example
• Test function
• Data set
– 40 sample points (random)
• GP
– 1000 Individuals, 1000 Generations
– 15 Trial
Page. 10
10510),,(
10510),,(
10510),,(
21
3
33213
13
3
23212
32
3
13211
xxxxxxf
xxxxxxf
xxxxxxf
]1,1[,, 321 xxx

Results of Proposed MOGP
Page. 11
21
3
33213 2),,(ˆ xxxxxxf
13
3
23212 2),,(ˆ xxxxxxf
32
3
13211 5.0),,(ˆ xxxxxxf

MODE of reusable launch vehicle (RLV)- Problem Setting -
■ Objective functions
1. Drag to be minimized (M=2.0, AOA = 0)
2. Maximum L/D to be maximized
at subsonic condition (M=0.8)
3. Maximum L/D to be maximized
at supersonic condition (M=2.0)
4. Body volume to be maximized
■ Design paramters
Kink position (x, y)
Page. 12
Ascent phase
Return phaseLift-off
Nose-entry
Vertical landing
3.33
1.0x
yKink position(x,y)
CLCD
CA
0 [deg]
90 [deg]
A.O.A.

Page. 13
Gene type Tree expression
Generation 1500
Population 1500
Crossover ratio 0.8
Mutation ratio 0.1
Function sets + , - , * , /
Terminal sets Design parameter (x, y),Constants [-1, 1]
Constraint The number of nodes>1
Computational conditionsObjective functions
1.Maximization of squared correlation between CA, M=2.0, AOA=0
2.Maximization of squared correlation between L/DMAX, M=0.8
3.Maximization of squared correlation between L/DMAX, M=2.0
4.Maximization of squared correlation between Volume
5.Minimization of the number of nodes
in syntax tree
Extraction of design information using Proposed MOGP
CLCD
CA
0 [deg]
90 [deg]
A.O.A.
2x 3
Function node
Terminal node

Results of MOGP
Page. 14
))/(( 0.2, MMAXDL
))/(( 8.0, MMAXDL
)( 0,0.2, AOAMAC
0 1)(VolumeCor
2222 33.08.028.1
3.43.433.5
yyxxyx
xxyyfgp
The maximum sum of all squared correlation
Correlation
CA,M=20,AOA=0 -0.99
(L/D)MAX,M=0.8 0.44
(L/D)MAX,M=2.0 0.98
Volume -0.93
Cor
Cor
Cor
PreferedRegion

Page. 15
Results of MOGP
x
y
kin
)33.3
5.0arctan(
180)arctan(
180180
x
y
x
ykin
kin
gpf
])[90()1(][])[60
(
])[64.083.452.2180
])[74.08.1653.188(
3(...)42
3
32
32
yOxOyOy
xyOyyy
yOyy
Floor
2222 33.08.028.13.43.433.5 yyxxyxxxyyfgp

Page. 16
Volume
Normalized
0.2,)/( MMAXDL
8.0,)/( MMAXDL
0,0.2, AOAMAC
kin
Non-dominatedsolution
Dominatedsolution
Results of MOGP
Original design parameters
x
y
Conclusions• A new multi-objective genetic programming for design
exploration is proposed.– The unique feature of MOGP is the simultaneous
symbolic regression to multiple variables using correlation coefficients.
• MOGP is applied to non-dominated solutions of the design optimization problem of a bi-conical shape reusable launch vehicle.– The result of proposed MOGP presents symbolic equations
which have high correlation to zero-lift drag at supersoniccondition, maximum lift-to-drag at supersonic condition andvolume of shape at the same time.
– These results also have high correlation to kink angle of thebody geometry. It implies that proposed GP is capable offinding composite new design parameters.
Page. 17

Page. 18

Page. 19
About Genetic Programming• Extension of Genetic Algorithm(GA) (Koza, 1990)
sin
1x 2x 3)sin( 1x 23x
1.0 4.2 3.0
1x 2x 3x
GA (Array) GP(Tree expression)
x
6.28 x
X
sin
X
x
10
x
+
X
x
x
X
X
x
• Genetic operatorsCrossover
x
6.28 x
X
sin
X
x
6.28 x
X
cos
X
Mutation
• Genome expression of GP is different from GA

MODE for RVT- Problem Definition -
■ Design parameters
– Kink position(x, y)
■ Constraint conditions
– Base diameter = 3[m]
– Length of the body = 10[m]
– Nose radius(rf) = 0.043[m]
– Base corner radius(rs) = 0.057[m]
– Base radius(R) = 3.0[m]
Page. 20
3.33(10[m])
rf: 0.043
rs: 0.057
1.0
(3[m])
R: 3.0
x
y
Kink position(x,y)
CLCD
CA
0 [deg]
90 [deg]
A.O.A.

Computational methods and conditions
Mach
number
Angle of
Attack [deg.]
Ascent phase 2.0 0
Return phase 2.0 10,25,40
0.8 10,25,40,55
(Re = 1.0x107)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 20.0 40.0 60.0
A.O.A. [deg.]L
/D
L/D MAX■ Flow analysis
20L Computational Grid( 100x53x93 )
L
■ CFD
– 3rd order MUSCL+SLAU (for shock instability)
– Baldwin-Lomax
■ MOEA
– Non-dominated Solution GA-II (NSGA-II)
■ Computational Methods
■ Computational Conditions
■ Optimization‒ Population size: 20
‒ Generation size: 20 400 body shapes(3200 CFD runs) are evaluated
Page. 21

Comparison of computational time
Page. 22
0 0.5 1 1.5 2 2.5 3 3.5
2 objective GP
Proposed MOGP
Computational Time

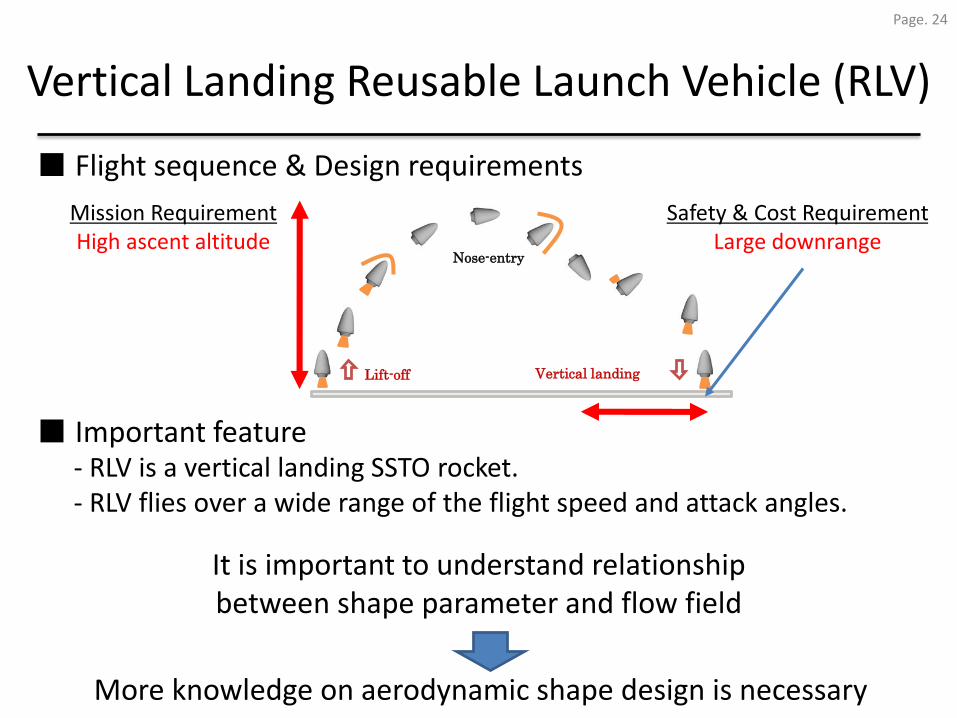
Vertical Landing Reusable Launch Vehicle (RLV)
Page. 23
- One of the future space transportation systems
Reusable Sounding Rocket Vehicle(RSRV)Reusable Vehicle Testing(RVT)
- Motivation of development- Low cost, reusability and reliability
Vertical Landing Reusable Launch Vehicle (RLV)
Page. 24
- RLV is a vertical landing SSTO rocket.- RLV flies over a wide range of the flight speed and attack angles.
■ Flight sequence & Design requirements
Lift-off
Nose-entry
Vertical landing
Mission RequirementHigh ascent altitude
Safety & Cost RequirementLarge downrange
More knowledge on aerodynamic shape design is necessary
■ Important feature
It is important to understand relationshipbetween shape parameter and flow field

Proposed GP
A new type of Genetic Programming
Page. 25
1. Change the measure of accuracy
GP
Minimization of mean absolute error
N
yy iiiˆ
min
Proposed GP
Maximization of correlation coefficient
22 )ˆˆ()(
)ˆˆ)((max
yyyy
yyyy
iiii
iii
GP
1) Minimization of mean absolute error between obji2) Minimization of the number of nodes
2. Change the number of objective functions
1) Maximization of correlation coefficient between obj12) Maximization of correlation coefficient between obj2
N) Maximization of correlation coefficient between objNN+1) Minimization of the number of nodes
obji : ith objective function of MOO

Page. 26
x y x2 y2 xy xy2 x2y x3 Const.
Maximum Cor(CA,M=2.0,AOA=0 ) 2.75 -4.1 -2.6 -2 3.1 -1 1 -1.65
Maximum Cor(L/DMAX,M=0.8 ) 0.7 0.6 -1 -4 4 2 0.4
Maximum Cor(L/DMAX,M=2.0 ) -3.87 8.75 1.3 5 -0.1 -0.3
Maximum Cor(Volume) 1 -2 0.2 0.1 0.3
Maximum sum of all correlation 4.3 -5.33 -1.28 -0.33 4.3 -0.8
①
②
③
④
①
②
③
④
kin
⑤
⑤
Results of proposed MOGP
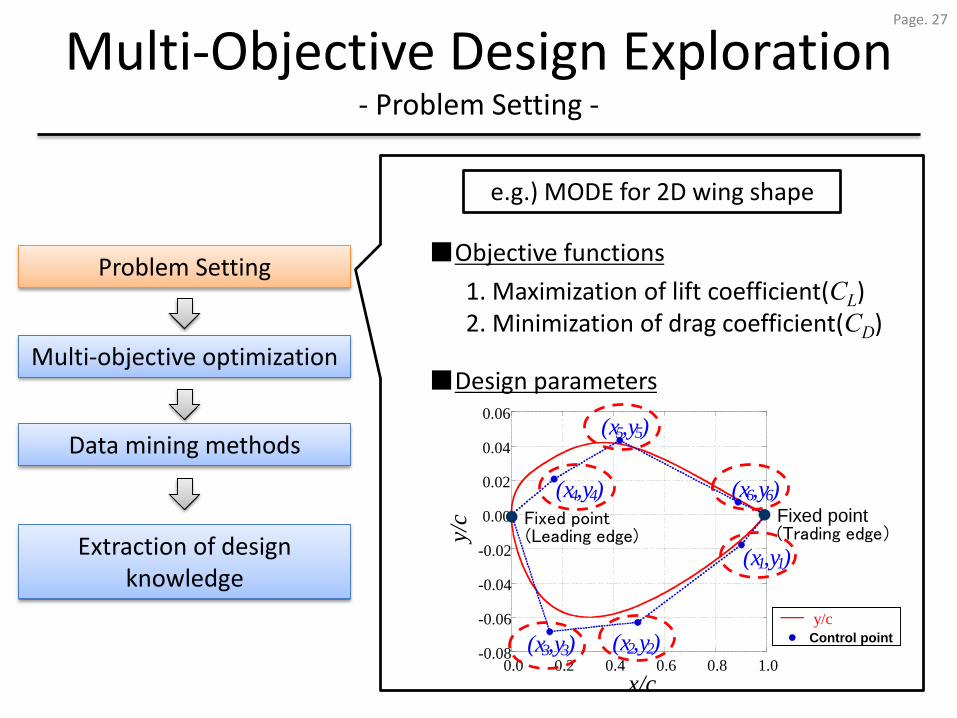
Multi-Objective Design ExplorationPage. 27
■Objective functions
1. Maximization of lift coefficient(CL) 2. Minimization of drag coefficient(CD)
-0.08
-0.06
-0.04
-0.02
0.00
0.02
0.04
0.06
0.0 0.2 0.4 0.6 0.8 1.0
y/c
Control point
y/c
x/c
Fixed point(Trading edge)
Fixed point(Leading edge)
(x1,y1)
(x2,y2)(x3,y3)
(x6,y6)
(x5,y5)
(x4,y4)
■Design parameters
e.g.) MODE for 2D wing shape
- Problem Setting -
Problem Setting
Multi-objective optimization
Data mining methods
Extraction of design knowledge

Multi-Objective Design ExplorationPage. 28
0.00
0.05
0.10
0.15
0.20
-0.2 0.0 0.2 0.4 0.6 0.8 1.0
Designs with constraint violation
Dominated solutions
Nondominated solutions
CD
Cl
CL max solution
CD min solution
L/D max solution
Solutions against constraintsDominated solutionsNon-dominated solutions
LC
Non-dominated solutions are obtained by using multi-objective evolutionary algorithms
- Multi-objective optimization -
Problem Setting
Multi-objective optimization
Data mining methods
Extraction of design knowledge

Page. 29
Cl
0.02 0.06 0.10 -0.06 -0.02 0.02 0.06 0.80 0.84 0.88 0.92 0.10 0.15 0.20 0.25
0.2
0.4
0.6
0.8
0.02
0.04
0.06
0.08
0.10
0.95 Cd
0.90 0.92 y4
0.02
0.04
0.06
0.08
0.10
0.12
-0.06-0.04-0.020.000.020.040.06
0.88 0.93 0.95 y2
0.81 0.78 0.93 0.85 y3
-0.070-0.065-0.060-0.055-0.050-0.045
0.80
0.82
0.840.86
0.880.90
0.92
-0.73 -0.80 -0.78 -0.90 -0.66 x6
-0.70 -0.71 -0.50 -0.55 -0.37 0.38 x20.40
0.45
0.50
0.55
0.2 0.4 0.6 0.8
0.10
0.15
0.20
0.25
-0.52 -0.59
0.02 0.06 0.10
-0.71 -0.67
-0.070 -0.060 -0.050
-0.55 0.57
0.40 0.50
0.19 x4
Scatter plot matrix with correlation coefficient
Multi-Objective Design Exploration
LC
DC
4y
2y
3y
6x
2x
4x
- Data mining methods -
Problem Setting
Multi-objective optimization
Data mining methods
Extraction of design knowledge
Multiple-regression analysis
426324 21.033.033.023.067.05.1 xxxyyyCL
426324 18.024.019.057.018.05.1 xxxyyyCD

Computational methods and conditions
Mach
number
Angle of
Attack [deg.]
Ascent phase 2.0 0
Return phase 2.0 10,25,40
0.8 10,25,40,55
(Re = 1.0x107)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 20.0 40.0 60.0
A.O.A. [deg.]L
/D
L/D MAX■ Flow analysis
20L Computational Grid( 100x53x93 )
L
■ CFD
– 3rd order MUSCL+SLAU (for shock instability)
– Baldwin-Lomax
■ MOEA
– Non-dominated Solution GA-II (NSGA-II)
■ Computational Methods
■ Computational Conditions
■ Optimization‒ Population size: 20
‒ Generation size: 20 400 body shapes(3200 CFD runs) are evaluated
Page. 30

Results of MOGP
Page. 31
))/(( 0.2, MMAXDL
))/(( 8.0, MMAXDL
)( 0,0.2, AOAMAC
0 1)(VolumeCor
65.126.275.21.31.4 3222 xyxyxxxyy
4.03.187.35575.8 22 xxxyyy
2222 33.08.028.13.43.433.5 yyxxyxxxyy
3.01.02.02 2 xxyyy
4.06.07.0244 222 yxxxyxyy
(A)
(B)
(C)
(D)
(E) The maximum sum value of all squared correlation
CA_M20 0.89
LD_M08 -0.078
LD_M20 -0.94
Volume 1.00
CA_M20 0.98
LD_M08- -0.36
LD_M20 -1.0
Volume 0.96
CA_M20 -1.0
LD_M08 0.46
LD_M20 0.98
Volume -0.91
CA_M20 -0.99
LD_M08 0.44
LD_M20 0.98
Volume -0.93
Cor
Cor
Cor
CA_M20 -0.44
LD_M08 0.97
LD_M20 0.35
Volume -0.11

Page. 32
New Param.(A)
New Param.(B)
New Param.(C)
New Param.(D)
kin
New Param.(E)
Results of MOGP
x
y
kin
)33.3
5.0arctan(
180)arctan(
180180
x
y
x
ykin

Example of GPsymbolic regression
Page. 33
321
2
3
2
121321 )cos()sin(),,( xxx
x
xxxxxxxf
f
1x
2x
3x
Test function :
Data set
Gene type Tree expression
Generation 1000
Population 1000
Crossover ratio 0.8
Mutation ratio 0.2
Function sets +, - , *, /, sin, cos
Terminal sets Design parameters,Constants [-1, 1]
Constraint The number of nodes>1
Computational Condition

Example of GP- Result -
Page. 34
321
2
3
2
121321 )cos()sin(),,( xxx
x
xxxxxxxf 574th generation →
Residual (Accuracy)
No
de
Len
gth
(Co
mp
lexi
ty)

symbolic regression example
• Test function
• Data set
– 40 sample points (random)
• GP
– 3 type of GP
• TOGP-MAE (2 Objective GP, Mean Absolute Error)
• TOGP-SCC (2 Objective GP, Squared Correlation Coefficient)
• MOGP-SCC (Multi Objective GP, Squared Correlation Coefficient)
– 1000 Individuals, 1000 Generations
– 15 Trial
Page. 35
10510),,(
10510),,(
10510),,(
21
3
33213
13
3
23212
32
3
13211
xxxxxxf
xxxxxxf
xxxxxxf
]1,1[,, 321 xxx

Results
Page. 36
TOGP-SCCTOGP-MAE MOGP-SCC
- History of accuracy
- Comparison of computational time