a fuzzy set-based approach to range-free localization in
TRANSCRIPT

FACTA UNIVERSITATIS (NIS)
SER.: ELEC. ENERG. vol. 23, no. 2, August 2010, 227-244
A Fuzzy Set-Based Approach to Range-Free Localizationin Wireless Sensor Networks
Andrija S. Velimirovi c, Goran Lj. Djordjevi c, Maja M. Velimirovi c,and Milica D. Jovanovic
Abstract: Localization in Wireless Sensor Networks (WSNs) refers to the ability ofdetermining the positions of sensor nodes, with an acceptable accuracy, based onknown positions of several anchor nodes. Among the plethoraof possible localizationschemes, the Received Signal Strength (RSS) based range-free localization techniqueshave attracted significant research interest for their simplicity and low cost. However,these approaches suffer from significant estimation errorsdue to low accuracy of RSSmeasurements influenced by irregular radio propagation. Inorder to tackle the prob-lem of RSS uncertainty, in this work we propose a fuzzy set-based localization methodas an enhancement of the ring-overlapping scheme [1]. In theproposed method, firstwe use a fuzzy membership function based on RSS measurementsto generate fuzzysets of rings that constrain sensor node position with respect to each anchor. Then wegenerate fuzzy set of regions by intersecting rings from different ring sets. Finally,we employ weighted centroid method on the fuzzy set of regions to localize the node.The results obtained from simulations demonstrate that oursolution improve localiza-tion accuracy in the presence of radio irregularity, but even for the case without radioirregularity.
Keywords: Wireless Sensor Networks, Range-free localization, Received SignalStrength, Ring-overlapping, Fuzzy set theory.
1 Introduction
RECENT advances in wireless communications, low-power design, and MEMS-based sensor technology have enabled the development of relatively inexpen-
sive and low power wireless sensor nodes. The common vision is to create alarge
Manuscript received on January 18, 2010.The authors are with Faculty of Electronic Engineering, University of Nis, A. Medvedeva 14,
18000 Nis (e-mail:[email protected]).
227

228 A. Velimirovic, G. Djordjevic, M. Velimirovic, and M. Jovanovic:
wireless sensor network (WSN) through ad-hoc deployment of hundreds or thou-sands of such tiny devices able to sense the environment, compute simple task andcommunicate with each other in order to achieve some common objective, like en-vironmental monitoring, target tracking, detecting hazardous chemicals andforestfires, monitoring seismic activity, military surveillance [2]. Most of these applica-tions require the knowledge on the position of every node in the WSN. However,in most cases, sensor nodes are deployed throughout some region of interest with-out their position information known in advance. Thus, the first task that has to besolved is to localize the nodes, i.e., to find out their spatial coordinates in some fixedcoordinate system. Determining the physical positions of sensor nodes is a crucialproblem in WSN operation because the position information is used (i) to identifythe location at which sensor readings originate, (ii) in energy aware geographicrouting, and (iii) to make easier network self-configuration and self-organization.Also, in many applications the position itself is the information of interest [3].
One possible way to localize sensor nodes is to use the commonly availableGlobal Positioning System (GPS), which offers 3-D localization based on directline-of-sight with at least four satellites [4]. However, attaching a GPS receiverto each sensor node is highly impractical solution due to its high power consump-tion, high price, inaccessibility (nodes may be deployed indoors, or GPS receptionmight be obstructed by climatic conditions) and imprecision (the positioning errormight be of 10-20m) [5]. A number of localization systems and algorithms havebeen proposed recently specifically for WSNs, which are generally classified intorange-based and range-free localization schemes. The range-based localization de-pends on the assumption that sensor nodes have the ability to estimate the distanceor angle to other nodes by means of one or more of the following measurements:received signal strength (RSS), time of arrival (TOA), time differenceof arrival(TDOA), and angle of arrival (AOA) [6–10]. Although the range-based schemestypically provide a lower estimation error than the range-free schemes, theyre-quire installation of specific and expensive hardware (e.g., directive antennas) toobtain relatively accurate distance (or angle) measurements and have weakness inthe noisy environments.
In contrast to range-based technique, the range-free scheme enables sensornodes to estimate their locations without relying on distance/angle measurements[3,5,11,12]. Such techniques generally require numerous anchors(location-awarenodes) which enable location-unknown sensor nodes to determine their locations byexploiting the radio connectivity information among nodes, or by comparing theirRSS measurements with those supplied by anchors or nearby nodes. Range-free so-lutions use only standard features found in most radio modules as hardware meansfor localization, thus providing more economic and simpler location estimates thanthe range-based ones. On the other hand, the results of range-free methods are not

A Fuzzy Set-Based Approach to Range-Free Localization ... 229
as precise as those of the range-based methods.In this paper we propose a distributed range-free localization technique,called
Fuzzy-Ring, which utilizes the received signal strength information to estimatetherelative position of a sensor node with respect to a small number of randomlydistributed anchors. Similar to other area-based localization methods [1, 12,13],Fuzzy-Ring uses beacons broadcasted by anchors to isolate a region of the local-ization space where the sensor node most probably resides. Like in ROCRSSIalgorithm [1], the localization region is defined as the intersection area of overlap-ping annular rings which constrain the position of the sensor node with respect toeach anchor. The rings are generated by comparison of the signal strength a sensornode receives from a specific anchor and the signal strength other anchors receivefrom the same anchor. The novelty of our localization scheme is to represent over-lapping rings as fuzzy sets with ambiguous boundaries. The use of the fuzzy settheory is motivated by the fact that RSS measurements are usually inaccuratedueto a number of factors such as multipath propagation, reflection, interference andshadowing among others. Such irregularity of the radio propagation creates non-circular ring borders and might induce a significant localization error when a binarydecision-making model (“in-ring” versus “out-of-ring”) is employed, likein RO-CRSSI. In our approach, we use fuzzy membership functions based onthe RSSinformation to represent the degree to which a sensor node location is within dif-ferent rings, which helps to improve localization estimations, especially for sensornodes located in proximity to ring boundaries.
The rest of the paper is organized as follows: Section 2 introduces localizationbased on comparison of RSS and discuses how fuzzy set theory can beapplied inthis range-free approach. Section 3 presents the proposed localizationapproach.Results for the simulations are shown in Section 4. Finally, Section 5 concludesthis paper.
2 Localization based on comparison of RSS
RSSbased rangefree algorithms only rely on the assumption that the RSS is a de-creasing function of the distance between transmitter and receiver. For example, ifthe straight of the beacon signal that sensor nodeS receives from anchorA is smallerthan the straight of the same signal received by anchor B, thenS can conclude thatit is closer toA then toB. A number of distance constraints, produced after a seriesof such comparisons, will enable the sensor node to confine its position withinalimited area of the localization space.
Let consider a network withn = 3 anchors placed at fixed known positionsin 2-D localization space shown in Fig. 1. Around each anchor the set ofn− 1

230 A. Velimirovic, G. Djordjevic, M. Velimirovic, and M. Jovanovic:
concentric circles is placed. Radius of every circle equals distance between centeranchor and one ofn−1 remaining anchors. Each set of concentric circles partitionsthe localization space inton rings numbered from 1 ton. The ring 1 correspondsto the area of the innermost circle, while the ringn−1 corresponds to the outsidearea of the last circle. A localization region is the intersection area of rings fromdifferent ring sets, while its area-code is the sequence of the intersectingring num-bers, i.e. ring ranks. For example, shaded area in Fig. 1 represents theregion witharea-code (2, 1, 2), i.e. the region which is obtained by intersecting rings2, 1 and2 of anchorsA1, A2, andA3, respectively. Note that for each pointp in this region,the area-code (2, 1, 2) defines the following set of distance-based constraints:
d(A1,A2) ≤ d(A1, p) ≤ d(A1,A3)
d(A2,A2) ≤ d(A2, p) ≤ d(A2,A3)
d(A3,A2) ≤ d(A3, p) ≤ d(A3,A1)
whered(x,y) denotes the distance between two anchors/nodes.
Fig. 1. Rings, regions and area codes.
In an idealistic physical environment, RSS measured at a point further from ananchor is always smaller then RSS measured at a point that is closer to the sameanchor. As a consequence, if we use RSS information for the regionalization ofthe localization space, the resulting set of regions, i.e. the set of region area-codes,will be the same as one obtained by using distance information. This means that asensor node will always be able to locate itself into the correct localization regionby using the comparison of RSS values, only. For example, the following setof

A Fuzzy Set-Based Approach to Range-Free Localization ... 231
RSS-based constraints will confine the location of the sensor nodeS inside theregion (2, 1, 2) of the network given in Fig. 1:
rss(A1,A2) ≥ rss(A1,S) ≥ rss(A1,A3)
rss(A2,A2) ≥ rss(A2,S) ≥ rss(A1,A3)
rss(A3,A2) ≥ rss(A3,S) ≥ rss(A1,A1)
where rss(x,y) denotes the strength of the signal broadcasted by anchorx as mea-sured by anchor/nodey.
However, the radio propagation is usually not homogenous in all directionsbecause of the presence of multi-path fading and different path losses dependingon the direction of propagation. As a result, the ordering of the anchors basedon comparison of RSS values might not be identical with their ordering basedoncomparison of Euclidean distances, which might induce localization errors.Letconsider a partial distance-based regional map of the network configuration withfour anchors given in Fig. 2. A sensor nodeS, depicted with square mark, islocated in the region with area-code (3, 1, 1, 3). However, due to inaccurate RSSmeasurements,S may easily came up with the wrong decision regarding its regionalarea-code. For example, in order to correctly locate itself into ring 3 of the anchorA4, S should measure lower strength of the beacon signal broadcasted byA4 thenanchorA3. However, because of the irregularity in radio propagation, there is achance forS to measure a higher RSS value thenA3. Such an imprecision willcause the sensor nodeS to choose the area-code (3, 1, 1, 2) instead of the correctone (3, 1, 1, 3). AsS is closer to the boundary of theA4’s ring 3 the chance for thewrong ring selection is larger. Note that area code (3, 1, 1, 2) is valid, but wrong.Under some circumstances,S may pick an area-code that does not even exist indistance-based regional map, i.e. it may select so called invalid area-code. Forexample, an incorrect ring selection with respect to anchorA2 could result in thearea-code (3, 2, 1, 3). It is easy to see that this area-code does notexist in the givenregional map since 3rd rings of anchorsA1 andA4 intersect in two regions, only,i.e. in regions (3, 1, 1, 3) and (3, 4, 4, 3).
In ROCRSSI algorithm, the problem of incorrect ring/region selection is solvedby choosing the valid region (or regions) with the maximum number of intersectingrings. However, in this approach, a small radio irregularity in the proximity ofringboundaries may lead to the large localization error, as illustrated in Fig. 3(a).Inorder to overcame the uncertainty of the RSS and the nonlinearity between theRSS and the distance, in this work we suggest a different approach based of thefuzzy set theory. We use fuzzy sets to model relationship between localizationregions and the RSS information available to the sensor node. When comparingits RSS measurements with those of anchors, the sensor node will not selectone

232 A. Velimirovic, G. Djordjevic, M. Velimirovic, and M. Jovanovic:
Fig. 2. A segment of distance-based regional map.
region only, but it might choose two or more regions each with different weightrepresenting certainty of the decision. This concept is illustrated in Fig. 3(b).Different shades of gray indicate different weighs of the selected regions. Finally,the center of gravity of the shaded area is used as the final location estimation.
(a) (b)
Fig. 3. ROCRSSI vs. fuzzy selection of localization regions.
3 Fuzzy-Ring Localization Algorithm
In this section, we describe our novel fuzzy set-based range-free localizationscheme, which we call Fuzzy-Ring. Fuzzy-Ring requires a heterogeneous wirelesssensor network composed of two sets of static nodes distributed across a planarsensing field: the set of anchors, i.e. the nodes whose locations are known, andthe set of sensor nodes, i.e. the nodes whose locations are to be determined. Forsimplicity and ease of presentation we limit the sensing field to 2-D, but with minormodifications our algorithm is capable of operating in 3-D. Anchor nodes, or nodeswith a prior knowledge of their locations in the sensing field (obtained via GPS orother means such as pre-configuration), serve as reference points,broadcasting bea-

A Fuzzy Set-Based Approach to Range-Free Localization ... 233
con messages. They are assumed to be sparse and randomly located. Bothanchorsand sensor nodes are equipped with omni-directional antennas and RF transceiverswith built-in RSS indicator (RSSI) circuitry. Anchors are assumed to have a largercommunication range than normal sensor nodes so that their beacons can reach allwireless nodes in the network. The Fuzzy-Ring algorithm proceeds in four phases:1) Beacon exchange, 2) Distance-based regionalization, 3) RSS-based regionaliza-tion, and 4) CoG calculation. These steps are performed at individual nodes in apurely distributed fashion.
3.1 Beacon exchange
The Fuzzy-Ring algorithm requires every anchor to periodically send out beaconmessage including its own ID. While receiving a beacon every anchor andsensornode samples the received signal straight (RSS) and stores measured value togetherwith the ID of the transmitting anchor. At the end of this period, all anchors broad-cast so-called localization messages to all sensor nodes. Localization message in-cludes anchors ID and its location information, along with a vector containing therecorded RSS values of beacons it received from other anchors. We assume that an-chors are synchronized so that their beacon and localization message transmissionsdo not overlap in time. Note that after beacon exchange phase, each sensor nodeS knows not only locations of all anchors, but also RSS values measured betweeneach pair of anchors as well as between each anchor andS, i.e.:
• Vector [li], i =∈ {1, . . .} of anchors locations whereinli = (axi,ayi) is 2-Dcoordinate of anchorAi in the sensor field.
• Vector [xi], i =∈ {1, . . .} of sensor nodes RSSI readings wherein xi is thestrength of the beacon signal that S received from anchorAi.
• Matrix [ri, j] of anchors RSSI readings whereinri, j is the strength of the signalthat anchorA j received form anchorAi.
3.2 Distance-based regionalization
After collecting enough information, a sensor node can start the localizationpro-cess. The first step in this process is to create a distance-based regional map ofthe localization space by using the known locations of all anchors. LetAS = {Ai},i = 1, . . . ,n, be the set of anchors. TakingAi as the center anchor, elements inAS canbe arranged into theanchor sequence Qi = (a0 = Ai,a1, . . . ,an−1, an = F) orderedby distance toAi, whereina j ∈ {Ai}, j ∈ {1, . . . ,n−1}, andF is a fictive anchorplaced in infinity. Thus,d(Ai,a j) ≤ d(Ai,a j+1), j ∈ {1, . . . ,n−1}. Each anchorsequenceQi, j ∈ {1, . . . ,n−1} defines an ordered sequences of distance-intervals

234 A. Velimirovic, G. Djordjevic, M. Velimirovic, and M. Jovanovic:
Ti = ([0,d(Ai,a1)], . . . , [d(Ai,a j),d(Ai,a j+1)], . . . , [d(Ai,an−1),∞]). For any pointpin localization space and any anchorAi, there is exactly one distance-interval inTi such thatd(Ai,a j) ≤ d(Ai, p) ≤ d(Ai,a j+1). Therank of point p with respect toanchorAi, written asranki(p), is the ordinal number of the corresponding distance-interval inTi. Area-code of point p, written asC(p), is defined as the sequence of itsranks with respect to all anchors, i.e.c(p) = (rank1(p), . . . ,rankn(p)). Note that theorder in which the ranks are written in an area-code is determined by a predefinedorder of anchor IDs.Localization region, R, with area-codeC(R) = C is the set ofall points in the localization space with the same area-code, i.e.R = {p | c(p) =C}.Distance-based regional map, denoted asD, is the set of area-codes of all regionsidentified in the localization space.
For the purpose of the proposed localization algorithm, each region is repre-sented by the following two attributes: (a) the area-code, and (b) the center ofgravity (CoG). CoG of regionR is defined as the average location of all points inR. Since the analytical procedure for finding regions and their CoGs is rather in-volved for resource constrained sensor nodes due to the large numberof floatingpoint operations, we adopted an approximate approach based on grid-scan algo-rithm [1, 12]. In this algorithm, the localization space is divided into uniform gridof M×M points, and the area-code is determined at each point in the grid. Initially,the distance-based regional map,D, is empty. In order to identify localization re-gions, the grid is scanned, point-by-point. For each grid point p with coordinates(px, py) the area-codec(p) is first determined based on its Euclidean distances tothe anchors and pre-determined anchor sequences, and then the regional mapD issearched for that code. If the area-codec(p) is not found, it is inserted into themapD, and the new regionR is created with the codec(p). Four variables,C, X ,Y , andP, are associated with each region, representing its area-code, the sum ofx-coordinates, the sum ofy-coordinates, and the total number of grid points in theregion, respectively. When the new region is created, its variables are initializedto C = C(p), P = 1, X = px, andY = py. Otherwise, ifD already contains thearea-codeC(p), variablesX , Y , andP of that region are updated; i.e.X = X + px,Y = Y + py andP = P+1. After grid scanning is completed, the region CoG coor-dinates are calculated as(X/P,Y/P).
3.3 RSS-based regionalization
In this algorithm step, sensor node creates aRSS-based regional map by compar-ing its own RSSI readings with those gathered from anchors. Assume that RSSmeasurements are in the rangeI = [0,RSSmax], and denote withri, j the RSS valueof the beacon signal sent by anchorAi as measured byjth anchor in anchor se-quenceQi = (a0 = Ai,a1, . . . ,an−1, an = F). We also assume thatri,0 = RSSmax,

A Fuzzy Set-Based Approach to Range-Free Localization ... 235
andri,n = 0. The value ofri, j splits the RSS range into two disjoint sub ranges:LTi, j = [0,ri, j], andGTi, j = [ri, j,RSSmax]. Note thatLTi,0 = GTi,n = I. The RSS-interval with rank j in respect to anchorAi, denoted asRIi, j, represents the subrange of RSS values between those measured by two successive anchors, ai, j andai, j+1, in anchor sequenceQi. In the case of monotonic attenuation of radio sig-nal, i.e. whenri, j ≥ ri, j+1, RSS-interval is defined asRIi, j = [ri, j,ri, j+1]. However,due to the irregular radio propagation, the monotonic characteristic might notbealways satisfied, and it might happen thatri, j ≤ ri, j+1, i.e. RIi, j = [ri, j+1,ri, j]. Thus,the RSS-interval can be defined as:
RIi, j =
{LTi, j ∩GTi, j, if ri, j ≥ ri, j+1
GTi, j ∩LTi, j, if ri, j < ri, j+1(1)
Fig. 4 shows the relationship between distance-intervals and RSS-intervalsalong one particular anchor sequence. RSS values ofA1’s beacon signal as mea-sured by three different sensors,S1, S2, andS3 are denoted withrs1, rs2, andrs3,respectively. Note that in 2-D localization space each distance-interval correspondsto one ring centered in anchorA1. Note also that due to the anomaly in the radiopropagation, anchorA2 measures a larger RSS value thanA3 introducing overlap-ping of RSS-intervals. Using the “rigid” comparison of RSS values both sensorsS1
andS2 will be localized within the ringA1 - A4 since. Although we may have a highdegree of confidence in this decision as sensorS1 is concerned, the real location ofsensorS2 is much more uncertain due to its proximity to the boundary between RSSintervalsRI1,1 andRI1,2. The radio irregularity makes the position of sensor nodeS3 even more uncertain since its RSS measurement,rs3, fits in three RSS intervals,RI1,2, RI1,3 andRI1,4.
In order to minimize the effect of the uncertainty in RSS values on transitionfrom RSS-based to distance-based domain, we explicitly incorporate the uncer-tainty in the modeling of RSS intervals using the concepts of fuzzy set theory.First,we represent RSS sub ranges,LTi, j and,GTi, j as fuzzy setsLT i, j = {(x,µ i, j
LT (x))|x ∈
I} and{(GT i, j = {(x,µ i, jGT (x))| ∈ I}, where,µ i, j
LT and µ i, jGT represent membership
functions defined as:
µ i, jLT (x) =
1, if x < ri j(1−P)1
2P(
xri, j
−1)−12, if ri, j(1+P) ≤ x ≤ ri, j(1−P)
0, if x < ri, j(1+P)
µ i, jGT (x) =1−µ i, j
LT (x)
(2)
A graphical interpretation of membership functions,µ i, jLT (x) andµ i, j
GT (x) is givenin Fig. 5. ParameterP, which we call the level of fuzzification, is involved to enable

236 A. Velimirovic, G. Djordjevic, M. Velimirovic, and M. Jovanovic:
Fig. 4. Relationship between RSS-intervals and distance-intervals.
adaptation to various levels of radio propagation irregularity. The value ofP∈ [0,1]controls the width of fuzzy region of the membership functions. Functionsµ i, j
LT (x),andµ i, j
GT (x) are used by a sensor node when it compares the straight of the beaconsignal it received from anchorAi,x, with the RSS valueri, j of the same beaconmeasured byjth anchor in the anchor sequence headed inAi. Whenx is outsidethe fuzzy region, the outcome of this comparison is strictly “greater then” or “lessthen” describing the full membership in one of two RSS sub-ranges,LTi, j or GTi, j.On the other hand, whenx is in the fuzzy region, the result of the comparison is apartial membership in both RSS sub-ranges.
Fig. 5. Membership functions.
Fuzzy setRIi, j = {(x,µ i, jRI (x))|x ∈ I} representing RSS-intervalRIi, j is derived
according to (1) by applying the fuzzy intersection operation on fuzzy sets LT i, j
andGT i, j. For membership functionµ i, jRI (x) we use:
µ i, jRI (x) =
{µ i, j
LT (x)+ µ i, j+1GT (x)−1, if ri, j ≥ ri, j+1
µ i, jGT (x)+ µ i, j+1
LT (x)−1, if ri, j < ri, j+1(3)

A Fuzzy Set-Based Approach to Range-Free Localization ... 237
Note that expression (3) is known in fuzzy set theory as bounded product (orbold intersection) [14]. A sensor node uses functionµ i, j
RI (x) to determine the degreeof its membership injth ring placed around anchorAi.
Given vectorX = (x1,x2, . . . ,xn) of sensor nodes RSS measurements, the fuzzy-ring set with respect to anchorAi, written asRIi, is the set of ranks of all RSS-intervals with non-zero degree of membership in respect to anchorAi, i.e.,
RIi = {( j,µ i, jRI (x))| µ i, j
RI (x)) > 0}, i = 1, . . . ,n
Note that elements ofRIi are integers in range[1,n]. Note also thatRIi ⊆P({1,2, . . . ,n}), whereP denotes a power set. Cardinality of a fuzzy-ring setdepends on several factors, such as the number of anchors, the value of parameterP, and the level of radio propagation irregularity.
The RSS-based regional map is Cartesian product of fuzzy-ring sets:
RM = RI1× RI2×·· ·× RIn = {(C,µRM(C))},
where C( j1, j2, . . . , jn) is area-code, andµRM(C) = µ1, j1RI (x1) · µ1, j2
RI (x2) · . . . ·
µ1, jnRI (xn).
Elements ofRM are region area-codes. The degree of membership of an area-code in RSS-based regional map is derived by multiplying degrees of sensor nodemembership in all rings that intersect in the corresponding region.
The last operation of the fuzzification process filters out all invalid area-codesfrom the RSS-based regional map. The output is the fuzzy set of area-codes,FR,that contains all area-codes ofRM that also belong to the distance-based regionalmap,D, i.e.
FR = D∩ RM = {(C,µRM(C))| C ∈ D, C| ∈ RM}
Note that degrees of membership of area-codes inFR are the same as inRM.In some rare cases it may happen thatFR does not contain any area-code. Insuch situations, there are two options: to left the sensor node unknown (i.e. not-localized), or to repeat the fuzzification process with a larger value of parameterP.We implement the second one.
3.4 CoG Calculation
Given the fuzzy set of area-codes,FR, the goal of the final step of the localizationprocess is to find the crisp real value that represent the estimated location of thesensor node. Note that two numeric attributes are associated with each area-codein FR: (a) the CoG of the corresponding localization region, and (b) the degree of

238 A. Velimirovic, G. Djordjevic, M. Velimirovic, and M. Jovanovic:
membership inFR. We use Center of Area method (CoA) to produce final locationestimation:
Estimated location =
{ΣC∈FRxCoG(C)µRM(C)
ΣC∈FRµRM(C),ΣC∈FRyCoG(C)µRM(C)
ΣC∈FRµRM(C)
}
where and arex- andy-coordinate of CoG of the region with area-codeC.
4 Simulation Results
We implement Fuzzy-Ring localization algorithm in a custom WSN simulator buildin C++, and conducted several experiments to evaluate its performances.In addi-tion, we compare our results to the ROCRSSI algorithm. Our evaluation is basedon the simulation of a benchmark set of 60 different network configurations cat-egorized into six subsets of ten networks with the same number of anchors. Weanalyze network configurations with 3 to 8 anchors. All networks in one subset arecreated by varying positions ofn anchors within the same basic setup of 200 sensornodes randomly deployed in a circular area of 100 m in diameter. In our simula-tions, we intend to illustrate the impact of the number of anchors, the degree radiopropagation irregularity, and the level of fuzzification on the localization error. Theperformance of two localization methods is evaluated using the location estimationerror defined as(d/D)×100 %, whered is the Euclidian distance between the reallocation of a sensor node and its estimated location, andD is the diameter of thelocalization area.
4.1 Radio propagation model
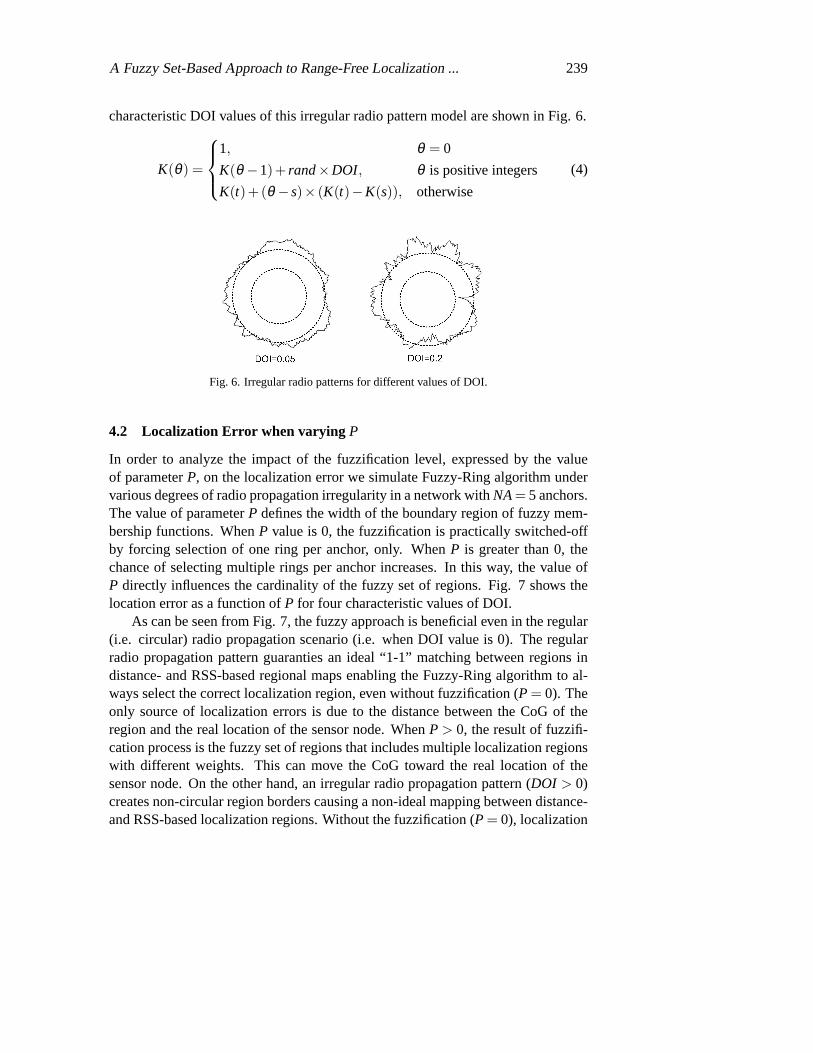
We adopt the Degree Of Irregularity (DOI) radio propagation model introduced in[12] and subsequently extended in [1]. In this model, the signal strength isdefinedasC×k(θ)/d2, whereC is a constant,d is the distance between the receiver and thetransmitter, andK(θ) is the coefficient representing the difference in path loss indifferent directions.K(θ) is calculated according to (4) whereθ ∈ [0,360◦], rand isa random number uniformly distributed in range[−1,1], s = ⌊θ⌋, andt = ⌈θ⌉ [1].The parameter DOI is used to denote the irregularity of the radio pattern. It isdefined as the maximum signal straight variation per unit degree change in thedirection of radio propagation. When DOI value is 0, there is no variation in thesignal straight which results in a perfectly circular radio model. When DOI> 0,large DOI values represent large variation of radio irregularity. Examples of two
A Fuzzy Set-Based Approach to Range-Free Localization ... 239
characteristic DOI values of this irregular radio pattern model are shown inFig. 6.
K(θ) =
1, θ = 0
K(θ −1)+ rand ×DOI, θ is positive integers
K(t)+(θ − s)× (K(t)−K(s)), otherwise
(4)
Fig. 6. Irregular radio patterns for different values of DOI.
4.2 Localization Error when varying P
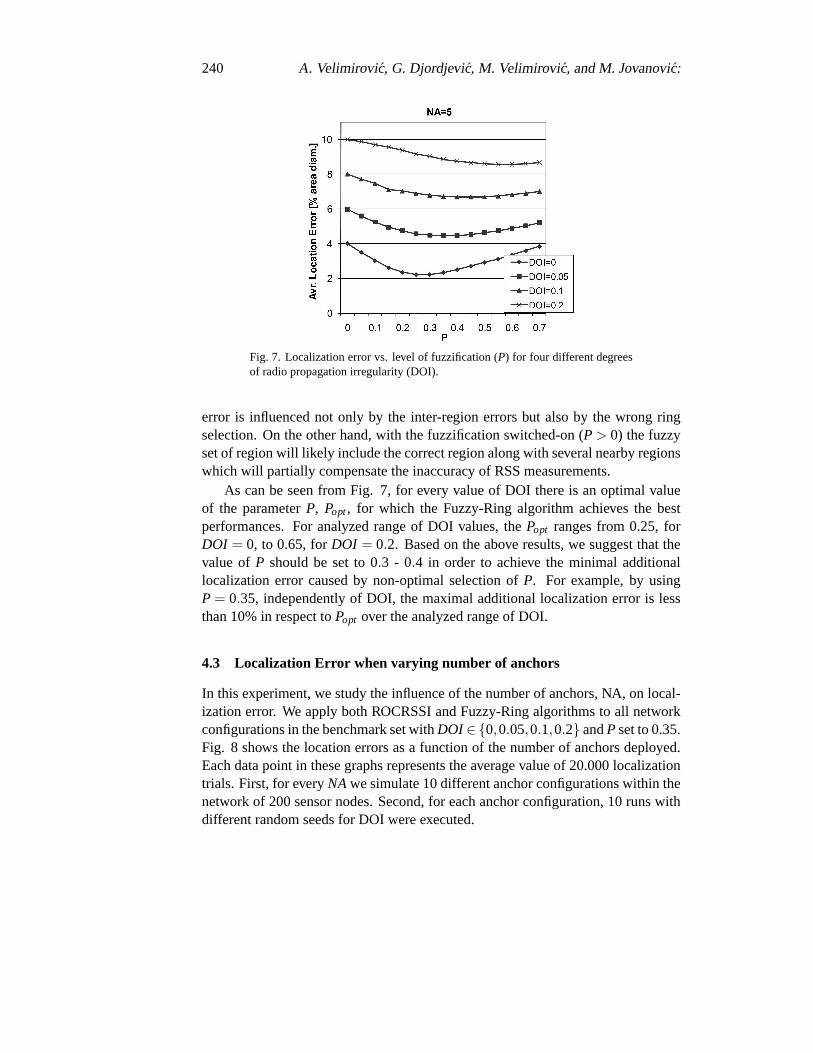
In order to analyze the impact of the fuzzification level, expressed by the valueof parameterP, on the localization error we simulate Fuzzy-Ring algorithm undervarious degrees of radio propagation irregularity in a network withNA = 5 anchors.The value of parameterP defines the width of the boundary region of fuzzy mem-bership functions. WhenP value is 0, the fuzzification is practically switched-offby forcing selection of one ring per anchor, only. WhenP is greater than 0, thechance of selecting multiple rings per anchor increases. In this way, the value ofP directly influences the cardinality of the fuzzy set of regions. Fig. 7 shows thelocation error as a function ofP for four characteristic values of DOI.
As can be seen from Fig. 7, the fuzzy approach is beneficial even in theregular(i.e. circular) radio propagation scenario (i.e. when DOI value is 0). Theregularradio propagation pattern guaranties an ideal “1-1” matching between regions indistance- and RSS-based regional maps enabling the Fuzzy-Ring algorithm to al-ways select the correct localization region, even without fuzzification (P = 0). Theonly source of localization errors is due to the distance between the CoG of theregion and the real location of the sensor node. WhenP > 0, the result of fuzzifi-cation process is the fuzzy set of regions that includes multiple localization regionswith different weights. This can move the CoG toward the real location of thesensor node. On the other hand, an irregular radio propagation pattern(DOI > 0)creates non-circular region borders causing a non-ideal mapping between distance-and RSS-based localization regions. Without the fuzzification (P = 0), localization
240 A. Velimirovic, G. Djordjevic, M. Velimirovic, and M. Jovanovic:
Fig. 7. Localization error vs. level of fuzzification (P) for four different degreesof radio propagation irregularity (DOI).
error is influenced not only by the inter-region errors but also by the wrong ringselection. On the other hand, with the fuzzification switched-on (P > 0) the fuzzyset of region will likely include the correct region along with several nearby regionswhich will partially compensate the inaccuracy of RSS measurements.
As can be seen from Fig. 7, for every value of DOI there is an optimal valueof the parameterP, Popt , for which the Fuzzy-Ring algorithm achieves the bestperformances. For analyzed range of DOI values, thePopt ranges from 0.25, forDOI = 0, to 0.65, forDOI = 0.2. Based on the above results, we suggest that thevalue of P should be set to 0.3 - 0.4 in order to achieve the minimal additionallocalization error caused by non-optimal selection ofP. For example, by usingP = 0.35, independently of DOI, the maximal additional localization error is lessthan 10% in respect toPopt over the analyzed range of DOI.
4.3 Localization Error when varying number of anchors
In this experiment, we study the influence of the number of anchors, NA, onlocal-ization error. We apply both ROCRSSI and Fuzzy-Ring algorithms to all networkconfigurations in the benchmark set withDOI ∈{0,0.05,0.1,0.2} andP set to 0.35.Fig. 8 shows the location errors as a function of the number of anchors deployed.Each data point in these graphs represents the average value of 20.000localizationtrials. First, for everyNA we simulate 10 different anchor configurations within thenetwork of 200 sensor nodes. Second, for each anchor configuration, 10 runs withdifferent random seeds for DOI were executed.

A Fuzzy Set-Based Approach to Range-Free Localization ... 241
From Fig. 8, we can observe that Fuzzy-Ring always outperforms ROCRSSIin terms of localization error, no matter whether the radio propagation is regular orirregular. For example, Fig. 8(b) shows that when we set the number of anchors
(a) (b)
(c) (d)
Fig. 8. Localization error vs. number of anchors for: (a)DOI = 0; (b) DOI = 0.05; (c)DOI = 0.1;(d) DOI = 0.2.
at 6, Fuzzy-Ring achieves 0.04D accuracy, which is 28% more accuratethan theROCRSSI. Thus, Fuzzy-Ring algorithm enables us to deploy a smaller number ofanchors to obtain the same level of performances as with ROCRSSI. For example,whenDOI is 0.05, the Fuzzy-Ring only needs 5 anchors to achieve the same lo-calization error as ROCRSSI with 8 anchors. However, it is important to notethatFuzzy-Ring is more computationally intensive then ROCRSSI. Based on the aboveresults, we suggest that the optimal number of anchors should be 5 or 6 because de-

242 A. Velimirovic, G. Djordjevic, M. Velimirovic, and M. Jovanovic:
ploying a larger number of anchors results in marginal improvement of localizationaccuracy, only.
4.4 Localization Error when varying DOI
In this experiment, the results of which are shown Fig. 9, we quantify the degreeof localization performance degradation in the presence of radio irregularity. Weconduct the analysis on the network configuration with 5 anchors under various de-grees of radio propagation irregularity (DOI). For Fuzzy-Ring algorithm we set thelevel of fuzzification toP = 0.35. From Fig. 9, we observe that with the increaseof DOI values, the localization error keeps increasing. WhenDOI is 0, the radiopropagation patter is circular and the localization error is 0.04D, for ROCRSSI, and0.023D, for Fuzzy-Ring. But when theDOI increases to 0.2, the radio propagationpatter becomes very irregular and the localization error increases to 0.12D, for RO-CRSSI, and 0.089D, for Fuzzy-Ring. Note that Fuzzy-Ring outperforms ROCRSSIin the whole range of analyzedDOI values reducing the location error for 0.017D,whenDOI is 0, up to 0.03D, whenDOI is 0.2.
Fig. 9. Localization error vs. degree of radio propagation irregularity for RO-CRSSI and Fuzzy-Ring algorithms.
5 Concussion
Many applications of wireless sensor networks depend on accurate determinationof the positions of all network nodes. In this paper, we describe and investigate

A Fuzzy Set-Based Approach to Range-Free Localization ... 243
RSS-based range-free localization method, called Fuzzy-Ring. The novelty of ourscheme is to combine ROCRSSI, a ring-overlapping approach originally proposedin [12], and the fuzzy set theory for performing sensor localization. Fuzzy set theo-retical approach helps to manage uncertainty associated with RSS more efficientlywith less number of anchors. Simulation results show that Fuzzy-Ring performsbetter than ROCRSSI in terms of localization accuracy by about 15-30% under dif-ferent number of anchors and degrees of radio propagation irregularity. We alsoshow that Fuzzy-Ring improves range-free localization under ideal radio propaga-tion model.
This paper does not consider the way to adapt the level of fuzzification tothevarying degree of radio propagation irregularity. This remains for a future work.In our future work, we would also like to test the proposed scheme under morenetwork scenarios such as limited radio range of anchors, and to study theeffect oftopology of anchor nodes on localization error.
Acknowledgment
This work was supported by the Serbian Ministry of Science and TechnologicalDevelopment, project No. TR - 11020 - “Reconfigurable embedded systems”.
References
[1] C. Liu, T. Scott, K. Wu, and D. Hoffman, “Range-free sensor localization with ringoverlapping based on comparison of received signal strength indicator,”InternationalJournal of Sensor Networks (IJSNet), vol. 2, no. 5, pp. 399–413, 2007.
[2] F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci, “Wireless sensor net-works: A survey,”Computer Networks, vol. 38, no. 3, pp. 393–422, 2002.
[3] N. Bulusu, J. Heidemann, , and D. Estrin, “GPS-less low-cost outdoor localizationfor very small devices,”IEEE Personal Communications, vol. 7, no. 5, pp. 28–34,Oct. 2000.
[4] B. H. Wellenhoff, H. Lichtenegger, and J. Collins,Global positions system: theoryand practice, 4th ed. Springer Verlag, 1997.
[5] D. Nicolescu and B. Nath, “DV based positioning in ad hoc networks,” vol. 22, no. 1,pp. 267–280, 2003.
[6] G. Mao, B. Fidan, , and B. Anderson, “Wireless sensor networks localization tech-niques,”Computer Networks, vol. 51, no. 10, pp. 2529–2553, 2007.
[7] D. Niculescu and B. Nath, “Ad hoc positioning system (APS) using AOA,” in Proc.of the 22nd Annual Joint Conference of the IEEE Computer and CommunicationsSocieties, San Francisco, USA, 2003, pp. 1734–1743.
[8] Y. Kwon, K. Mechitov, S. Sundresh, W. Kim, and G. Agha, “Resilient localizationfor sensor networks in outdoor environments,” inProc. of 25th IEEE InternationalConference on Distributed Computing Systems (ICDCS), 2005, pp. 643–652.
[9] A. Savvides, C. C. Han, , and M. B. Srivastava, “Dynamic fine-grained localization inad-hoc networks of sensors,” inProc. of the seventh annual international conferenceon Mobile computing and networking (MobiCom 2001), 2001, pp. 166–179.
244 A. Velimirovic, G. Djordjevic, M. Velimirovic, and M. Jovanovic:
[10] P. Bahl and V. N. Padmanabhan, “RADAR: An in-building RF-based user locationand tracking system,”Proc. of IEEE, vol. 2, pp. 775–784, Mar. 2000, iNFOCOM2000. Nineteenth Annual Joint Conference of the IEEE Computer and Communica-tions Societies.
[11] R. Stoleru, T. He, and J. A. Stankovic, “Range-free localization,” in Advances inInformation Security series, R. Poovendran, C. Wang, and S. Roy, Eds. Springer,2007, vol. 30, chapter in Secure Localization and Time Synchronization for WirelessSensor and Ad Hoc Networks.
[12] T. He, C. Huang, B. Blum, J. A. Stankovic, and T. Abdelzaher, “Range-free local-ization schemes for large scale sensor networks,” inProc. of the ninth annual in-ternational conference on Mobile computing and networking (MobiCom 2003), SanDiego, California, Sept. 2003, pp. 81–95.
[13] V. Vivekanandan and V. W. S. Wong, “Concentric anchor-beacons (CAB) localiza-tion for wireless sensor networks,” inIEEE International Conference on Communi-cations, ICC06, vol. 9, Istanbul, Turkey, 2006, pp. 3972–3977.