a commercial of the shelf components for a...
TRANSCRIPT

Section Name
A COMMERCIAL OF THE SHELF COMPONENTS FOR A UNMANNED AIR
VEHICLE PHOTOGRAMMETRY
Pawel Burdziakowski
Jakub Szulwic
Faculty of Civil and Environmental Engineering, Gdansk University of Technology, Poland
ABSTRACT
A photogrammetry from a unmanned aerial vehicle (UAV) can be understood as a new
measurement tool. Is introduces a low-cost alternatives for a traditional aerial
photogrammetry. A commercial off-the-shelf products (COTS), that are commercially
available for a costumers, are the standard manufactures products, not custom. COTS
products are available in the commercial market and can be bought and used under
government contract. That fact makes it cheaper and available for all. Motivations for
using COTS components is a reduction of overall system-development and costs and
long-term maintenance costs. An aviation offers a different types of aircraft. Aircraft
may be classified by different criteria, such as lift type, aircraft propulsion. All those
types offers different attributes, that are more or less desirable for UAV
photogrammetry. A methodology for determining a platform type was developed in this
research, and the most suitable platform for a photogrammetry measurements was
chosen. In order to build a UAV platform for photogrammetry tasks, products available
on commercial market were analyzed with characteristics and technical data.
Keywords: COTS, UAV, photogrammetry, methodology
INTRODUCTION
Commercial off-the-shelf (COTS) products can be defined as an items, including
services, sold in the commercial marketplace. This is a standard manufactures products,
not specially designed for custom purposes. This item is commercially available, leased,
licensed and sold to the general public. COTS products not require special modification
or maintenance over its life cycle. It means that all components can be purchased on the
market, connected and programed for a final product.
Unmanned aerial vehicle (UAV), also called drone, is defined as a generic
aircraft design to operate with no human pilot onboard. Initially, UAV systems and
platforms were designed for a military applications. Military UAV are very
complicated, specially designed for a military operations. UAV technology was
unavailable to a wider community. During recent years UAV technology was
commercialized. Nowadays, it is possible to purchase small, simple and cheap drone
for a home usage. So called professional drones, but still commercial, are available on
the market and equipped with more advanced technology, better cameras, represents
better stability, endurance and maneuverability during flight. All components are
available on markets, can be replaced, modified, upgraded. It means, that UAV
technology becomes very popular and affordable for community.

16th International Multidisciplinary Scientific GeoConference SGEM 2016
UAV PHOTOGRAMMETRY
Fig. 1 Measurement methods and techniques – relationships between object size and accuracy [1] [4] [7]
Fig. 2 Geomatics techniques, sensors and platforms fo 3D recording purposes, according to the scene
dimensions and complexity [1][6]
UAV photogrammetry should be understood as a new photogrammetric
measurement tool. This technology opens a new applications in the close range domain,
combining aerial and terrestrial photogrammetry, but also introduces low-cost
alternatives to the classical manned aerial photogrammetry. UAV photogrammetry

Section Name
describes photogrammetric measurement platforms, which operate as either remotely
controlled, semi-autonomously, or autonomously [1].
Recent years showed that a the range of measurement technique published in [7]
and modified in [4], now can be revised again (Fig. 1), since NASA launched
X-37 project, also known as the Orbital Test Vehicle (OTV), which is a reusable
unmanned spacecraft. Since that moment unmanned aerial vehicle are enable to operate
in outer space.
Based on this information, new classification of geomatics 3D measurement
technique found in [6] should be revised as well (Fig. 2). Since UAV reached the space,
its capability to take a photogrammetry measurements reach ability close to
measurements taken from satellites.
UAV PLATFORMS
UAV platform (body) can be considered as a mechanical structure, typically
including a fuselage, wings and the propulsion system and aviation electronics,
excluding payload. Platforms design is a field of aerospace engineering that combines
aerodynamics, materials technology and manufacturing methods to achieve balances of
performance, reliability and cost. UAV platforms can be categorized using the main
characteristics of aircrafts. Table 1 shows a classification of the UAV platforms, which
can be used for photogrammetric applications.
Tab. 1 Classification of UAV according to the class [4]
Aerostat Aerodyne
Flexible wing Fixed wing Rotary wing Unpowered Balloon Hang glider Gliders Rotor-kite
Paraglider Kites
Powered Airship Paraglider Propeller Single rotors
Jet engines Coaxial Quadrotors
Multi-rotors
Fig. 3 UAS functional blocks.
UAV is a part of system named Unmanned Aerial System (UAS). A typical
UAS consists of an unmanned aerial vehicle, ground control station (GCS) and
a communication and control link (C2) between GCS and UAV. Critical UAV modules
are placed on board unnamed platform, such as navigation module (NM), flight control
module (FCM), mechanical servos. Depends on UAV main purpose and tasks payload
is different. In case of photogrammetry and remote sensing, payload could be defined as
a data acquisition module (DAM) (Fig.3).GCS can be defined as a stationary or

16th International Multidisciplinary Scientific GeoConference SGEM 2016
transportable devices to monitor, command and control the unmanned aircraft. Ground
control station can operate form ground, sea or air. It is a connection between machine
and an operator. The design of a GCS for UAV are to have a certain functional
requirements. Crucial functionalities are [5]: air vehicle control – a capability to
effectively control and fly the UAV during is mission, payload control – ability to
operate sensors from ground, mission planning – functionality that aids UAVs operator
in planning the mission providing required knowledge inputs concerning capabilities
and UAVs limitations, payload data analysis and dissemination – capability to
disseminate the data form payload to an eventual users, system/air vehicle diagnostics –
automatic test facility for UAV and GCS effective maintenance and deployment,
operator training – facility to train he air vehicle controller in handling the aircraft,
practicing mission plans and emergency procedures, post-flight analysis – capability to
store flight data and payload data and to analyses it after the flight.
NM is most critical module on board UAV. Navigation module repeatedly
provide the aircraft’s position, velocity and altitude to FCM. Navigation module
feeding FCM with a crucial data to guide unmanned platform. NM is equipped with
navigation systems (NS) to fix a platforms position (usually uses GNSS) and orientation
system (OS) with motion sensors (accelerometers) and rotation sensors (gyroscopes) to
continuously calculate orientation and velocity (direction and speed of movement) of a
platform (inertial measurement unit – IMU). Where NM (NS+OS) and FCM are
integrated in one module can be called autopilots.
FCM is defined as a devices commanding a flight, means leading UAV to
designated position and putting on the right orientation and speed. FCM consists of two
main parts: data analysis – this part is receiving commands from system operator and
current flight parameters form NM, analyses I and prepare commands for an executive
part in order to correct flight parameters. Second part is an executive part with
mechanical servos, engine electronic speed controller, designed to move all control
surfaces and regulate speed of engines.
DAM includes optical remote sensing instruments. Depends on characters of
desirable data the data acquisition module can be equipped with different type of sensor
including airborne image acquisition systems (from visible band to the near infrared
(NIR) up to the thermal infrared (TIR)), microwaves systems, active and passive
ranging instruments.
METHODOLOGY
In order to select the most suitable platform for a photogrammetry task platform
a parameters matrix was developed (Tab. 2). According to the classification (Tab.1)
a specified parameters have been assigned with an appropriate weight. The weights
range is 1 to 5. The weights for each type of platform have been developed on the basis
of own experience and research results [4] [6]. The parameter values varies from 0 to 2,
with 0 being the lowest characteristics (ability) platform in the specified parameter,
while the 2 highest. The result for the type of platform, was calculated from the
expression:
N
n
nn pwR1
. (1)
Section Name
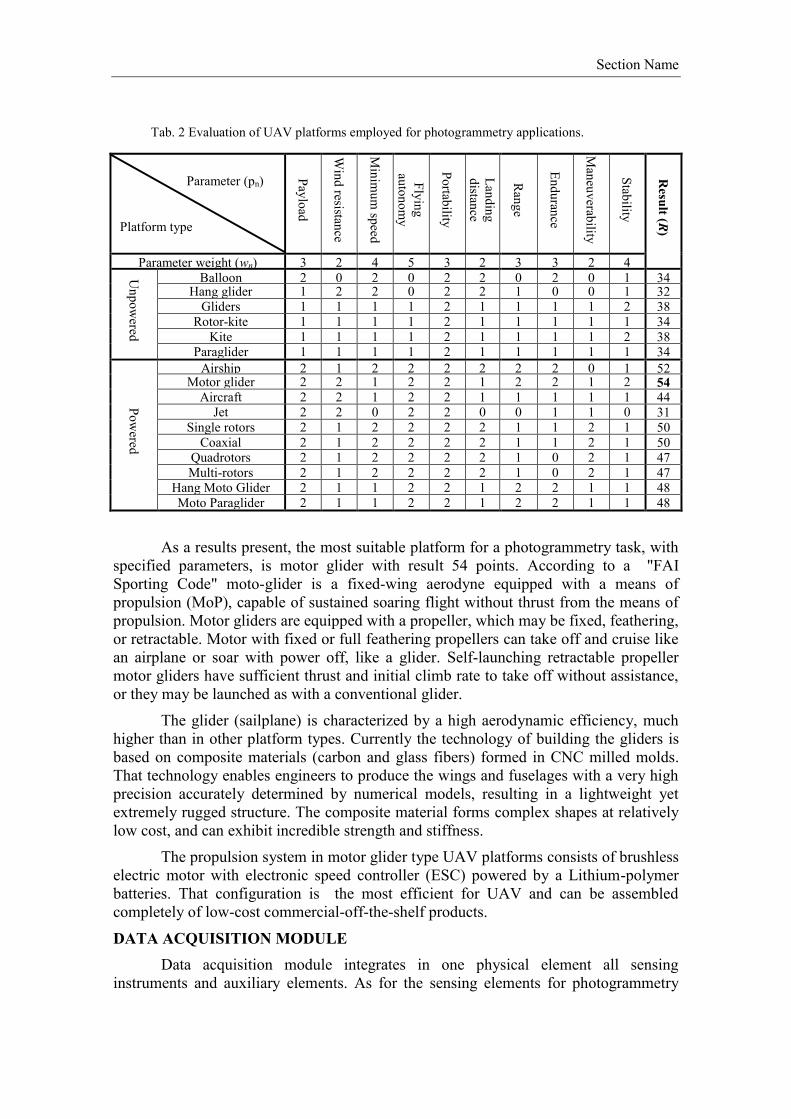
Tab. 2 Evaluation of UAV platforms employed for photogrammetry applications.
Parameter (pn)
Platform type
Pay
load
Win
d resistan
ce
Min
imu
m sp
eed
Fly
ing
auto
no
my
Po
rtability
Lan
din
g
distan
ce
Ran
ge
En
du
rance
Man
euv
erability
Stab
ility
Resu
lt (R)
Parameter weight (wn) 3 2 4 5 3 2 3 3 2 4
Un
po
wered
Balloon 2 0 2 0 2 2 0 2 0 1 34 Hang glider 1 2 2 0 2 2 1 0 0 1 32
Gliders 1 1 1 1 2 1 1 1 1 2 38 Rotor-kite 1 1 1 1 2 1 1 1 1 1 34
Kite 1 1 1 1 2 1 1 1 1 2 38 Paraglider 1 1 1 1 2 1 1 1 1 1 34
Po
wered
Airship 2 1 2 2 2 2 2 2 0 1 52 Motor glider 2 2 1 2 2 1 2 2 1 2 54
Aircraft 2 2 1 2 2 1 1 1 1 1 44 Jet 2 2 0 2 2 0 0 1 1 0 31
Single rotors 2 1 2 2 2 2 1 1 2 1 50 Coaxial 2 1 2 2 2 2 1 1 2 1 50
Quadrotors 2 1 2 2 2 2 1 0 2 1 47 Multi-rotors 2 1 2 2 2 2 1 0 2 1 47
Hang Moto Glider 2 1 1 2 2 1 2 2 1 1 48 Moto Paraglider 2 1 1 2 2 1 2 2 1 1 48
As a results present, the most suitable platform for a photogrammetry task, with
specified parameters, is motor glider with result 54 points. According to a "FAI
Sporting Code" moto-glider is a fixed-wing aerodyne equipped with a means of
propulsion (MoP), capable of sustained soaring flight without thrust from the means of
propulsion. Motor gliders are equipped with a propeller, which may be fixed, feathering,
or retractable. Motor with fixed or full feathering propellers can take off and cruise like
an airplane or soar with power off, like a glider. Self-launching retractable propeller
motor gliders have sufficient thrust and initial climb rate to take off without assistance,
or they may be launched as with a conventional glider.
The glider (sailplane) is characterized by a high aerodynamic efficiency, much
higher than in other platform types. Currently the technology of building the gliders is
based on composite materials (carbon and glass fibers) formed in CNC milled molds.
That technology enables engineers to produce the wings and fuselages with a very high
precision accurately determined by numerical models, resulting in a lightweight yet
extremely rugged structure. The composite material forms complex shapes at relatively
low cost, and can exhibit incredible strength and stiffness.
The propulsion system in motor glider type UAV platforms consists of brushless
electric motor with electronic speed controller (ESC) powered by a Lithium-polymer
batteries. That configuration is the most efficient for UAV and can be assembled
completely of low-cost commercial-off-the-shelf products.
DATA ACQUISITION MODULE
Data acquisition module integrates in one physical element all sensing
instruments and auxiliary elements. As for the sensing elements for photogrammetry

16th International Multidisciplinary Scientific GeoConference SGEM 2016
tasks we concentrated only on commercial visible light, spectral and thermal cameras
with weight less than 1500 g, basing on [8] (Tab. 3). An auxiliary elements are mainly
active or passive stabilization system, additional data storage, and optionally recovery
system.
In case of chosen platform type (motor glider) DAM components should closed in
be housing or placed within fuselage, in order to diminish an aerodynamic drag. In that
particular platform aerodynamic drag forces can negatively influence on gliders overall
performance. On the other hand, that problem is minimalized on different platform type
typical vertical takeoff and landing (VTOL) like single of multirotor copters.
Tab. 3 Commercial cameras
Company, model Resolution [px] Size [mm] Pixel size
[m] Spectral range
Frame rate (fps)
Weigh [g]
Remarks
Visible light cameras
Phase One IXU 180 10328 x 7760 53.7 x 40.4 5.2 visible 0.37 930 FMC -TDI
Trimble Aerial Camera
IQ180
10328 x 7760 53.7 x 40.4 5.2 visible N/D 1500 True FMC
Hasselblad A5D-60
8956 × 6708 53.7 × 40.2 6.0 visible 0.42 1360
Phantom Miro Airborne HD
1920 x 1080 N/D 5.5 visible 335 1140
Sony Nex-7 6000x4000 23.5 x 15.6 3.92 visible 10 550
GoPro Hero 4 Black 4000x3000 N/D N/D visible 2 89
Spectral cameras
Tetracam's Ultra-light 90 Gram
2048 x 1536 6.55 x 4.92 3.2 520 – 920 nm 0.5 -7.5 90
Tetracam's ADC Lite 2048 x 1536 6.55 x 4.92 3.2 520 - 920nm 0.5 -7.5 200
Quest Innovations
Condor-3 C3-VNN-692-UAV-SD
1280x720x3 5.19 x 2.92 4.06 400-1000 nm
(3 bands) 5 350
Quest Innovations
Condor-5 C5-UAV-sCMOS
1360x1024x3 8.77x6.60 6.45 400-1000 nm
(5 bands) 5/30 1450
Thermal cameras
Flir Quark 2 640 640x512 10.8x8.7 17 7.5-13 m 25 18.3 LWIR VOx
Flir Tau 2 640 640x512 10.8x8.7 17 7.5-13 m 25 72 LWIR VOx
Flir Neutrino 640x512 9.6x7.6 15 3.4-5.1 m 25 450 MWIR InSB
Flir TAU 15xRH 640x512 9.6x7.6 15 0.6-1.7 m 25 101 SWIR InGaAs
Flir Lepton 80x60 1.36x1.02 17 8-14 m 8.6 0.55 LWIR
NAVIGATION AND ORIENTATION MODULE
Form the photogrammetric point of view NM and OS are responsible for camera
extrinsic parameters determination. Geodetic-grade light-weight GNSS modules are
available on the commercial market (Tab. 4) with weight less than 100 g. Unfortunately,
light-weight geodetic-grade IMUs are not yet available [3]. A light-weight IMU
modules are based on MEMS (microelectromechanical systems) technology, therefore
are not able to provide very accurate data, in compare to a heavy weight FOG IMU
system (Fiber Optic Gyro). Commercial IMU for navigation purposes, with weight less
than 250 g are presented in Tab. 5. Tables 6 and 7 presents an integrated modules -
autopilots and hybrid navigation units (HNU) with weight less than 250 g.

Section Name
Tab. 4 Commercial satellite navigation modules
Company, model GNSS Wight
[g] L1 [m]
L1/L2
[m]
SBAS
[m]
DGPS
[m]
RTK
[m]
Terrastar-C
[m]
Veripos Apex
[m]
Novatel,
OEM 615
GPS L1/L2/L2C + GLONASS L1/L2
+ SBAS 24 1.5 1.2 0.6 0.4 0.01 N/D N/D
Novatel, OEM628
GPS L1/L2/L2C + GLONASS L1/L2
+ BeiDou + SBAS + L-Band 37 1.5 1.2 0.6 0.4 0.01 0.04 0.06
Novatel, OEM 625S
GPS L1/L2/L2C + GLONASS L1/L2
+ SBAS 56 1.5 1.2 0.6 0.4 0.01 N/D N/D
Novatel,
OEM638
GPS L1/L2/L2C + GLONASS L1/L2 + BeiDou + SBAS + L-Band 84 1.5 1.2 0.6 0.4 0.01 0.04 0.06
Cloud Cap
Technology,
DGPS FlightPak
Based on module
Novatel OEM 615 85 1.5 1.2 0.6 0.4 0.01 N/D N/D
Tab. 5 Commercial inertial navigation modules
Company, model Weight
[g]
BIAS
[deg/h]
Data Rate
[Hz]
RMS
[deg]
Roll Pitch Heading
Novatel. OEM-STIM300
55 0.5 125 0.015 0.015 0.080
Novatel.
OEM-HG1930 200 1 100 0.060 0.060 0.100
Novatel. OEM-ADIS-16488
48 5 500 0.035 0.035 0.150
AIMS.
uMotion 90 0.3 30 0.4 0.4 0.4
AIMS.
Motion 190 0.2 30 0.4 0.4 0.4
Tab. 6 Commercial Hybrid Navigation Units
Company, model GNSS
Weig
ht [g]
BIAS
[deg/h]
Data
Rate [Hz]
L1
[m]
L1/L2
[m]
SBAS
[m]
DGPS
[m]
RTK
[m]
Terrastar-C
[m]
Veripos Apex
[m]
Gladiator
Technologies,
LandMark 40 INS/GPS
GPS. GLONASS. BeiDou.
QZSS & SBAS (Galileo).
SBAS: WAAS. EGNOS. MSAS
160 6 100 2 N/D 2 N/D N/D N/D N/D
Imar Navigaion,
iuIMU-01 GPS/WAAS/EGNOS/MSAS 50 1 1000 1.5 2.5 N/D N/D N/D N/D N/D
Advanced navigation,
Spatial
GPS L1. GLONASS L1.
GALILEO E1. BeiDou B1 37 3 1000 2.0 N/D 1.0 0.6 N/D N/D N/D
Tab. 7 Commercial autopilots (Y- Available, N- no available)
Company, model Weight
[g] Gyro Accelerometer Magnetometer GPS DGPS RTK Radio Control Ground Station
Cloud Cap Technology,
Piccolo Nano 29 N N N Y Y N Y N
MicroPilot,
MP2128 24 Y Y N Y Y Y Y Y
ACS Sp. Z o.o., FCS-2
50 Y Y N Y N N N Y
PitLab Piotr Laskowski,
AutoPitLot bd Y Y Y Y N N N N
AirWare, Flight Core
74 Y Y N Y N N N N
ArduPilot,
3DR Pixhawk 38 Y Y Y Y N N N Y

16th International Multidisciplinary Scientific GeoConference SGEM 2016
CONCLUSION
As the results shows the moto glider is the most suitable platform for
a photogrammetry tasks. A crucial modules for navigation and data acquisition are
commercially available on the market with weight suitable for small UAV like moto
glider. Still, light-weight with geodetic-grade IMU modules are unavailable, however
in connection with sensor fusion or other navigation methods [1], a camera extrinsic
parameters can be determined with affordable accuracy.
REFERENCES
[1] Burdziakowski P., Przyborski, M, A. Janowski, Szulwic J., A vision-based
unmanned aerial vehicle navigation method., IRMAST 2015, 2015.
[2] Colomina, I., & de la Tecnologia, P. M., Towards A New Paradigm for High-
Resolution Low-Cost Photogrammetry and Remote Sensing. In The International
Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences,
ISPRS Congress, Beijing, China, XXXVII, 2008, Part B (Vol. 1, pp. 1201-1206).
[3] Colomina, I., & Molina, P., Unmanned aerial systems for photogrammetry and
remote sensing: A review. ISPRS Journal of Photogrammetry and Remote Sensing,
92, 2014, 79-97.
[4] Eisenbeiß, H., UAV photogrammetry. Zurich, Switzerland: ETH, 2009.
[5] Natarajan, G., Ground control stations for unmanned air vehicles (Review
Paper). Defence Science Journal 51.3, 2002, pp. 229-237.
[6] Nex, F., Remondino, F., UAV for 3D mapping applications: a review. Applied
Geomatics, 6(1), 2014, pp. 1-15.
[7] Luhmann, T., Robson, S., Kyle, S., & Harley, I., Close range photogrammetry:
Principles, methods and applications. Whittles, 2006, pp. 1-510
[8] RPAS YEARBOOK 2013, 13 edition