610819
TRANSCRIPT

5/7/2018 610819 - slidepdf.com
http://slidepdf.com/reader/full/610819 1/9
Ratna Ika Putri, Pengaturan Kecepatan Motor Induksi 3 Fasa, Halaman 1-9
1
PENGATURAN KECEPATAN MOTOR INDUKSI 3 FASA
DENGAN KONTROLER PID
METODE ZIEGLER-NICHOLS
Ratna Ika Putri*)
Abstrak
Motor induksi merupakan alat penggerak yang paling banyak digunakan dalam dunia
industri. Salah satu kelemahan motor induksi yaitu memiliki beberapa karakteristik parameter yang tidak linier terutama resistansi rotor sehingga tidak dapatmempertahankan kecepatannya secara konstan bila terjadi perubahan beban. Oleh karenaitu untuk mendapatkan kecepatan yang konstan dan performansi sistem yang baik maka
dibutuhkan suatu kontroler. Pada artikel ini didesain kontroler PID dengan penentuanparameter menggunakan metode Ziegler Nichols. Dari hasil uji simulasi dan eksperimen
didapatkan parameter transien yaitu settling time (ts) = 9.45 detik, rise time (tr) = 2.295
detik, delay time (td) = 2.16 detik, time constan ,2.295 detik = (ז) error steady state =
0.6% dan overshoot 35%. Sedangkan dengan memberikan perubahan beban makakontroler dapat mempertahankan kecepatan sesuai setpoint dengan recovery time sebesar4.158 detik .
Kata Kunci : Motor Induksi, PID, Ziegler Nichols
Abstract
Three phases induction motor is the most widely used electric motor in industries. The
induction motor has a weakness that is it is unable to maintain speed constantly due to
load changing because it has some non linear characteristic parameter especially on
rotor resistance. To get constant speed and better induction motor performance
therefore the controller is needed. This article designs PID controller with Ziegler
Nichols method. From the result of simulation and experiment obtained transient parameter that is settling time (ts) = 9.45 second, rise time (tr) = 2.295s, delay time (td)
= 2.16s, time constant (ז) = 2.295s, error steady state = 0.6% and overshoot 35%. While
on If load changing is given situation controller can maintain speed suitable with set
point with recovery time 4.158s
Keyword: Induction motor, PID, Ziegler Nichols
I. PENDAHULUANMotor induksi 3 fasa adalah alat
penggerak yang paling banyak digunakandalam dunia industri. Hal ini dikarenakan
motor induksi mempunyai konstruksi yangsederhana, kokoh, harganya relatif murah,serta perawatannya yang mudah, Sehingga
motor induksi mulai menggeser penggunaan
motor dc pada industri. Pada motor induksi
memiliki beberapa parameter yang bersifat
non-linier, terutama resistansi rotor, yang
memiliki nilai bervariasi untuk kondisi
operasi yang berbeda. Hal ini yang
menyebabkan pengaturan pada motor induksi
lebih rumit dibandingkan dengan motor DC.
Salah satu kelemahan dari motor induksi
adalah tidak mampu mempertahankankecepatannya dengan konstan bila terjadi
perubahan beban. Apabila terjadi perubahan
beban maka kecepatan motor induksi akan
menurun. Untuk mendapatkan kecepatan
konstan serta memperbaiki kinerja motor
induksi terhadap perubahan beban, maka
dibutuhkan suatu kontroler. Suatu kontrolerkonvensional PI dapat digunakan pada
pengaturan kecepatan motor induksi, tetapi
kontroler konvensional PI ini membutuhkan
masukan sensor yang akurat dan nilai
konstanta PI yang sesuai untuk menghasilkanpenggerak dengan performansi yang tinggi.
Oleh karena itu kontroler PI ini tidak dapat
mengatasi perubahan beban atau pengaruhlingkungan sehingga dapat memperburuk
performansi penggerak. (Ibrahim Z & Levi
E,2002: 240)
Kontrol otomatis memegang peranan yangpenting dalam perkembangan ilmu dan
teknologi, terutama di pabrik-pabrik dan
*) Ratna Ika Putri. Dosen Program Studi Teknik Elektronika Jurusan Teknik Elektro,
Politeknik Negeri Malang

5/7/2018 610819 - slidepdf.com
http://slidepdf.com/reader/full/610819 2/9
Jurnal ELTEK, Volume 06 Nomor 01, April 2008 ISSN 1693-4024
2
25%
t
C(t
1
0
industri. Dengan kontrol yang tepat dapat
mempertinggi kualitas, menurunkan biaya
produksi, dan meningkatkan laju hasil
produksi. Kontroler PID merupakan salah satu
kontrol otomatis yang memiliki kestabilan
yang cukup baik dalam mengatur kecepatan
motor terhadap perubahan beban yang
dinamis. Kontroler PID merupakan gabungan
dari kontroler P, I, dan D, yang masing-
masing mempunyai keunggulan dan
kelemahan, dengan menggabungkankeunggulan ketiga kontroler tersebut, maka
kontroler PID memiliki kestabilan yang cukup
baik.Pada penelitian ini dirancang suatu
pengaturan kecepatan motor induksi 3 fasa
dengan menggunakan kontroler PID dengan
metode ziegler-nichols. Dengan adanyapengaturan kecepatan ini diharapkan
kecepatan motor induksi dapat konstan sesuai
yang diinginkan, walaupun mendapatgangguan ataupun perubahan beban.
2. KAJIAN PUSTAKA
2.1. Kontroler Proposional-Integral-
Differential (PID)Kontrol otomatis yaitu membandingkan
harga yang sebenarnya dari keluaran plant
dengan harga yang diinginkan, menentukan
deviasi, dan menghasilkan suatu sinyalkontrol yang akan memperkecil deviasi
sampai nol atau sampai suatu harga yang
kecil. Kontroler otomatis akan menghasilkan
sinyal kontrol yang disebut aksi pengontrolan(Katsuhiko Ogata, 1994: 127). Kontroler
adalah suatu komponen dalam sistem yang
berfungsi mengolah sinyal error (selisih dari
set-point dengan keluaran feed-back ) menjadisinyal kontrol sedemikian, sehingga respon
keluaran pada t→∼ (keadaan steady state)
mendekati set-point atau dengan kata lain
pada keadaan steady state ε(∼) = minimal
(≈0).Kontroler dalam sistem yang
mempunyai dua masukan yaitu set-point dan
keluaran feed -back dengan satu keluaran yaitu
sinyal kontrol yang bekerja sedemikian,
sehingga selisih sinyal set-point (reference)
dengan keluaran feed-back pada t→ (steady
state) akan menuju nol (error steady state
minimal)( IbrahimLevi E,2002:240).
Kontroler PID (Proporsional- Integral-
Diferensial) adalah merupakan gabungan daritiga jenis kontroler. Jika dari masing-masing
ketiga kontrol tersebut berdiri sendiri-sendiri,
hasil aksi kontrol kurang bagus, karenamasing-masing mempunyai kelemahan dan
kelebihan. Dengan mengkombinasikan ketiga
jenis kontrol tersebut ke dalam satu sistemkontrol, diharapkan mampu memberikan
kontribusi dari kelebihan masing-masing
kontroler. Persamaan kontrol PID dapat
diberikan sebagai berikut:(Bahraim 1993 : 79)
∫ ++=t
d p
i
p
pdt
t deT K dt t e
T
K t eK t U
0
)()()(.)( (1)
U(t) = UP (t) + UI (t) + UD (t) (2)
Parameter KP adalah gain proporsional, TI adalah gain integral, dan TD adalah gain
derivatif dari kontrol PID. Dalam bentuk
transformasi laplace persamaan kontrol PID
dapat ditulis sebagai berikut:
U(s) = UP(s) + UI(s) + UD(s) (3)
)()( s E sT s
T K sU d
i
p
++= (4)
Untuk memenuhi sistem yang diinginkan,
maka ketiga parameter PID harus ditetapkan
secara optimal. Ada beberapa cara (metoda)
untuk menentukan parameter tersebut
diantaranya adalah:
a. Metoda coba-coba (cut and try
method ).
b. Metoda Ziegler - Nichols.
c.
Metoda tanggapan tangga (steprespons).
2.1.1. Metoda Ziegler- Nichols Aturan Ziegler - Nichols adalah untuk
penyepadanan alat-alat kontrol PID. Ziegler dan Nichols untuk menentukan nilai
penguatan proporsional KP, waktu integral TI,
dan waktu TD yang didasarkan pada
karakteristik respon transien suatu sistem
yang diketahui. Penentuan parameter alat
kontrol PID dapat dilakukan berdasarkan hasil
ekperimen pada sistem (Katsuhiko Ogata,1994:230).
Gambar 1 Respon Tangga Aturan Ziegler - Nichols

5/7/2018 610819 - slidepdf.com
http://slidepdf.com/reader/full/610819 3/9
Ratna Ika Putri, Pengaturan Kecepatan Motor Induksi 3 Fasa, Halaman 1-9
3
Penyepadanan aturan Ziegler - Nichols
terbagi dalam dua metode untuk pencapaian
25% lonjakan harga maksimum dalam respon
tangga seperti ditunjukkan pada gambar 1.
Metode pertama adalah hasil eksperimen
memperoleh respon sistem terhadap masukan
tangga, seperti ditunjukkan pada gambar 2.
Jika respon tidak mencakup integrator
ataupun nilai-nilai kutub pasangan kompleks
yang dominan, maka kurva respon tangga
dalam satuan mungkin menyerupai kurvaberbentuk-s seperti ditunjukkan gambar 3.
Gambar 3 Kurva Respon Berbentuk-S
Tabel 1. Aturan Pendekatan Ziegler - Nichols Jenis Kontroler KP TI TD
Kontroler PKontroler PIKontroler PID
T/L0.9T/L1.2T/L
∞ L/0.3
2L
00
0.5L
Keterangan:
T: Time konstan dalam detik
L: Lagging time dalam detik
2.2. Motor Induksi
Perputaran motor induksi 3 fasaditimbulkan oleh adanya medan putar (fluk
yang berputar) yang dihasilkan oleh kumparan
stator. Medan putar ini terjadi apabila
kumparan stator dihubungkan dengan sumber
tegangan jala-jala PLN. Motor induksi dapat
dihubungkan bintang maupunsegitiga.(Boldea I&Nasar SA, 1986: 85)
(a) (b)
(c) (d) (e) (f)
Gambar 4. Prinsip Terjadinya Medan Putar
Seperti pada gambar 4, misalkan
kumparan pada motor adalah a-a, b-b dan c-c
dihubungkan dengan 3 fasa masing-masing
fasa dengan beda 120o
listrik seperti gambar
1(a) dan dialiri oleh arus listrik yang
sinusoidal. Distribusi arus seperti padagambar 1(b) ia, ib dan ic sebagai fungsi waktu.
Pada keadaan t1, t,, t3 dan t4 fluks resultan yang
ditimbulkan adalah seperti pada Gambar 1(c),
1(d), 1(e) dan 1(f).
Pada saat t1 fluks resultan mempunyai arah
yang sama dengan arah fluks yang dihasilkan
oleh 1 kumparan a -a, sedangkan pada saat t2
fluks resultannva mempunyai arah yang sama
dengan arah fluks yang dihasilkan oleh k -
umparan c -c dan pada t3 fluks resultannyamempunyai arah yang sama dengan fluks yang
dihasilkan oleh kumparan b -b. Untuk t4 fluks
resultannya berlawanan arahnya dengan fluksresultan yang dihasilkan pada saat t1. Demikian
juga pada kondisi t5 fluks resultanya
berlawanan arahnya dengan kondisi pada t2.
Demikian seterusnya sehingga terjadiperputaran fluks magnit ini pada keliling
kumparan dengan kecepatan putarnya
sebanding dengan frekuensi dibagi dengan jumlah kutub magnit. Dengan persamaan
sebagai berikut:
rpm p
f n
120= (5)
dimana f adalah frekuensi dalam hertz dan p
jumlah kutub magnit yang digunakan. Jadi
putaran sinkron pada motor induksi tersebut
sangat tergantung pada frekuensi sumber yang
digunakan serta jumlah kutub magnit dari
kumparan motor.
2.2.1. Rangkaian Ekivalen Motor InduksiMotor induksi mempunyai 2 bagian
utama yaitu stator dan rotor. Stator adalahbagian yang diam dan biasanya dipasang
kumparan (lilitan) utama sekeliling statortersebut yang berfungsi penghasil medan putar
1
Sist
U
C
Gambar 2 Respon Satuan
L T
C(
t
K

5/7/2018 610819 - slidepdf.com
http://slidepdf.com/reader/full/610819 4/9
Jurnal ELTEK, Volume 06 Nomor 01, April 2008 ISSN 1693-4024
4
dan yang akan menyeret rotor berputar,
sedangkan rotor adalah bagian yang bergerak
dari motor induksi. Pada motor induksi juga
terdapat kumparan (lilitan) medan magnit
tetapi jumlahnya sedikit dan dipasang paralel
membentuk sangkar, biasanya disebut rotor
sangkar (Boldea I&Nasar SA, 1986:88).
Kerja dari motor induksi hampir sama
dengan kerja dari transformator, karena
transformator bekerja berdasarkan induksi
elektromagnit. Oleh karena itu, motor induksi juga dapat dianggap sebagai transformator
dengan rangkaian sekunder yang berputar.
Sehingga rangkaian ekivalen dari motorinduksi dapat dilukiskan sebagai rangkaian
transformator seperti yang ditunjukkan dalam
gambar 5.
Rangkaian Ekivalen stator Rangkaian Ekivalen rotor
Gambar 5. Rangkaian Ekivalen Motor Induksi
Dari rangkaian di atas dapat ditulis
persamaan secara vektor sebagai berikut:
)(11111 X R I E V ++=
∧∧∧
(6)
)(22222 L R X R I V E +++= ∧∧∧ (7)
V1 tegangan sumber volt, E1 tegangan ggl
lawan primer (stator) volt dan R1 tahanan
murni kumparan stator serta X1 reaktansikumparan stator, I1 arus stator. Sedangkan
pada rotor, E2 tegangan induksi rotor volt, V2
tegangan pada beban, R2 tahanan murni
kumparan rotor, X2 reaktansi kumparan rotor
dan RL adalah beban yang terpasang pada
rotor saat motor dibebani serta I2 arus pada
rotor.
2.2.2. SlipBila kecepatan motor dinyatakan dengan
n rpm dan kecepatan serempak medan putar
adalah n1 maka slip (S) adalah n1-n rpm.
Biasanya slip (S) dinyatakan dalam pecahan
kecepatan serempak atau dalam persen
dengan persamaan sebagai berikut:
%100)(1
1 xn
nnSSlip
−=
(8)
Berubah-ubahnya kecepatan motor
induksi (n) mengakibatkan berubahnya hargaslip dari 100% pada saat start sampai 0% pada
saat motor diam yaitu n=n1. Pada saat n=n1
yaitu motor dalam keadaan diam tegangan
tidak akan terinduksi dan arus tidak akan
mengalir pada jangkar rotor sehingga dengan
demikian tidak akan timbul kopel. Karena
kopel makan timbul apabila n kecil dari n1.
Hubungan frekuensi dengan slip dapat
dilihat sebagai berikut:
Bila f 1 = frekuensi jala-jala maka p
f n 1120=
atau120
1
1
pn f = maka pada rotor berlaku
persamaan untuk frekuensi rotornya yaitu:
120
)( 11
nn p f
−= (9)
karena slip (S) =1
1
n
nn −
dan 120
1
1
pn
f = maka
f 2 = f 1s (10)
Pada saat start slip (S) = 100% jadi f 1 = f 2
dengan demikian pada saat start dan rotor
belum berputar, frekuensi pada stator dan rotor
sama besarnya. Sedangkan dalam keadaan
rotor berputar frekuensi arus rotor dipengaruhi
oleh slip (S) yaitu f 2 = f 1S. Karena tegangan
induksi turut pula dipengaruhi oleh slip(Sumanto, 1993).
2.2.3 Torsi Motor Induksi Torsi untuk motor induksi dapat
dihitung dengan:
( ) ( )2
2
22
2
2
1'
2
/ X as Ra
E I
+
=(11)
( ) ( )22
22
2
2
2
2
/
/
X aS Ra
S Ra
impendansi
tahananCos
+==φ
(12)
φ ω cos3'
21 I E T P == (13)
Keterangan:
P: daya dalam satuan Watt.
T: Torsi dalam satuan Newton.
ω : Kecepatan sudut dalam satuan radian per
detik.Pada motor induksi kecepatan dan torsi
dapat diatur menggunakan beberapa metode
pengontrolan, yaitu:a. Pengontrolan melalui tegangan stator
(Stator voltage control).
b. Pengontrolan melalui tegangan rotor (Rotor voltage control).

5/7/2018 610819 - slidepdf.com
http://slidepdf.com/reader/full/610819 5/9
Ratna Ika Putri, Pengaturan Kecepatan Motor Induksi 3 Fasa, Halaman 1-9
5
c. Pengontrolan melalui frekuensi
(Frequency control).
d. Pengontrolan melalui tegangan stator dan
rotor (Stator voltage and frequency
control).
e. Pengontrolan melalui arus stator (Stator
current control).
f. Pengontrolan melalui tegangan, arus, dan
frekuensi (Voltage, current, and
frequency control).
3. PERANCANGAN
3.1. Blok Diagram Sistem PengaturanPengaturan kecepatan motor induksi
dengan metode PID Ziegler Nichols ini
memiliki blok diagram system seperti yang
ditunjukkan pada gambar 6
IBM Compatible
DAC
Tachogenerator
Inverter
=
~
ADC
BebanMotorInduksi
Gambar 6. Blok Diagram Sistem Pengaturan
Kecepatan Motor Induksi 3 Fasa
Nilai kecepatan motor induksi yang akan
diatur (setpoint ) dimasukkan melalui PC,
kontroler akan mengatur kecepatan dari motorinduksi sesuai dengan nilai setpoint yang
diinginkan dengan mengirimkan sinyal
kontrol yang sesuai. Sinyal kontrol dikirimkan
ke inverter melalui rangkaian DAC.
Kecepatan motor induksi diukur dengan
menggunakan tachogenerator yang digunakan
sebagai sinyal umpan balik ke kontroler.
Keluaran tachogenerator di kirim ke komputer
melalui rangkaian ADC.Perancangan system kecepatan motor
induksi tiga fasa ini terdiri dari beberapa tahap
yaitu:
3.2. Identifikasi Plant Identifikasi plant ini bertujuan untuk
mengetahui model plant dari sistem yang
dibuat, sehingga dapat menentukan model
kontrol yang sesuai dengan plant tersebut.
Model plant yang dihasilkan digunakan untuk
pengujian algoritma kontroler secara simulasi
sebelum diimplementasikan. Identifikasi
plant menggunakan metode strejc, denganmelihat respon plant tanpa menggunakan
kontroler (Open loop).
Berdasarkan respon plant untaian
terbuka dapat ditentukan parameter-parameter
fungsi alih plant dengan pendekatan model
strejc seperti yang ditunjukkan pada gambar7.
Gambar 7. Identifikasi Dengan Model Strejc
Langkah pertama dalam identifikasi dengan
strejc ini yaitu menentukan nilai Tu dan Ta
yang didapatkan dari penarikan garis
singgung respon untaian terbuka plant .Tu = 3.5 x 75 x 10
-3= 0.26 detik
Ta = (30 – 3.5) x 75 x 10-3
= 2 detik
Setelah didapat nilai Tu dan Ta maka dapat
ditentukan orde dari model plant
n = Tu/Ta = 0.26/2 = 0,13
dengan nilai n sebesar 0.13 maka plant ini
memiliki orde 2. Berdasarkan tabel strejc
pada plant orde 2 maka
Ta / T = 2,718T = 0,7358 detik
Tu’/ T = 0,282
Tu’
= 0,207505 detik
τ = Tu - Tu’
= 0,053255 detik
n
s
Ts
eK sG
)1()(
+=
−τ
2
053255.0
)17358.0()(
+=
−
s
eK sG
S
Dari persamaan dasar orde dua:
22
2
2)(
nn
n
ssK sG
ω ξω
ω
++= , maka:
31.171762.1 ==nω
31.12
70779.2
x=ξ
ξ= 1.033 (ξ > 1)
5/7/2018 610819 - slidepdf.com
http://slidepdf.com/reader/full/610819 6/9
Jurnal ELTEK, Volume 06 Nomor 01, April 2008 ISSN 1693-4024
6
Setelah didapatkan parameter-parameter
tersebut, dapat dituliskan transfer function
model plant sebagai berikut:
84706.168.3
265276.0)(
2 ++=∴s
sG
3.3. Perencanaan KontrolerKontroler yang digunakan yaitu
kontroler PID dengan metode Ziegler Nichols.
Pengaturan kecepatan motor induksi tiga fasa
dengan kontrol PID adalah suatu sistem
pengaturan kecepatan motor terhadapperubahan beban agar tetap mampu
mempertahankan kecepatan yang diinginkan
(set point ) dengan parameter kontrol PID.Persamaan kontrol PID yang digunakan
sebagai dasar membuat program
mikrokontroler sistem kontroler PID adalah
sebagai berikut:
∫ ++=t
d p
i
p
pdt
deT K dt e
T
K eK t U
0
)(
Harga parameter kontroler PID yang
dirancang menggunakan pendekatan respon
waktu dengan melalui dua cara, yaitu metode
limit stability Zeigler - Nichols dan metode
coba-coba (cut and try method ).
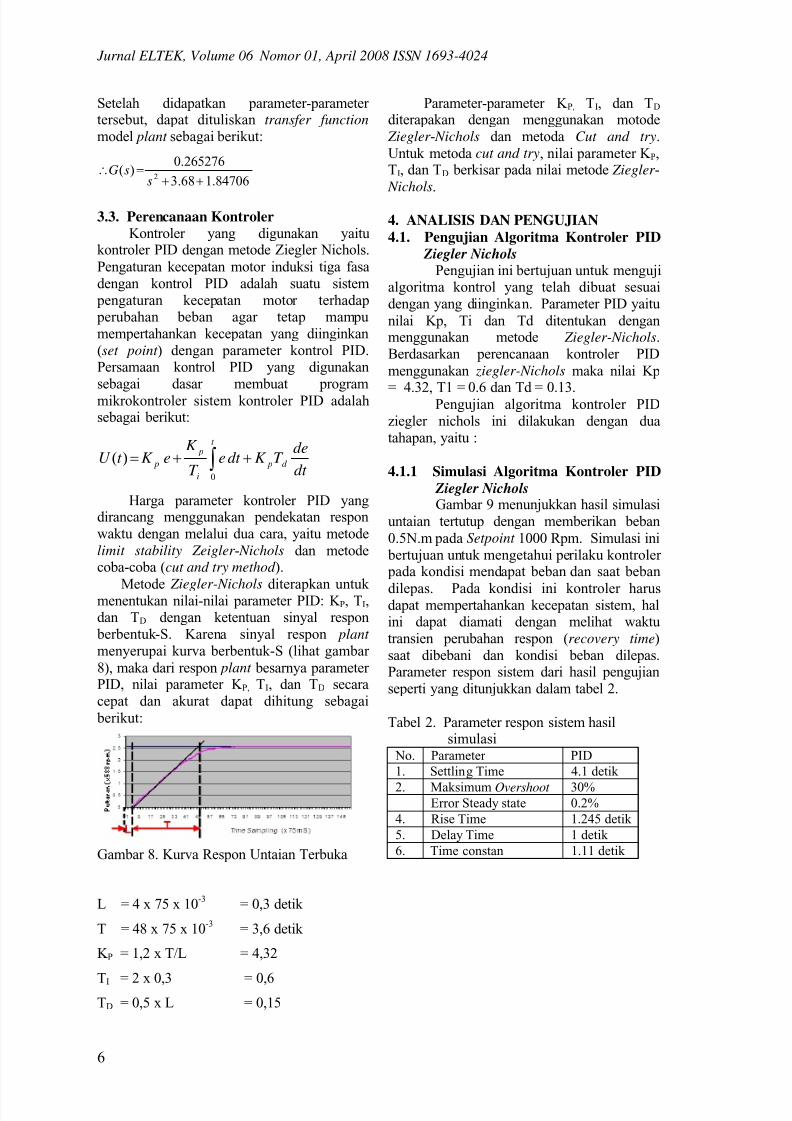
Metode Ziegler-Nichols diterapkan untuk menentukan nilai-nilai parameter PID: KP, TI,dan TD dengan ketentuan sinyal respon
berbentuk-S. Karena sinyal respon plant
menyerupai kurva berbentuk-S (lihat gambar
8), maka dari respon plant besarnya parameter
PID, nilai parameter KP, TI, dan TD secara
cepat dan akurat dapat dihitung sebagai
berikut:
Gambar 8. Kurva Respon Untaian Terbuka
L = 4 x 75 x 10-3
= 0,3 detik
T = 48 x 75 x 10-3
= 3,6 detik
KP = 1,2 x T/L = 4,32
TI = 2 x 0,3 = 0,6
TD = 0,5 x L = 0,15
Parameter-parameter KP, TI, dan TD
diterapakan dengan menggunakan motode
Ziegler - Nichols dan metoda Cut and try.
Untuk metoda cut and try, nilai parameter KP,
TI, dan TD berkisar pada nilai metode Ziegler -
Nichols.
4. ANALISIS DAN PENGUJIAN
4.1. Pengujian Algoritma Kontroler PID
Ziegler Nichols Pengujian ini bertujuan untuk menguji
algoritma kontrol yang telah dibuat sesuai
dengan yang diinginkan. Parameter PID yaitu
nilai Kp, Ti dan Td ditentukan dengan
menggunakan metode Ziegler-Nichols.
Berdasarkan perencanaan kontroler PID
menggunakan ziegler-Nichols maka nilai Kp
= 4.32, T1 = 0.6 dan Td = 0.13.Pengujian algoritma kontroler PID
ziegler nichols ini dilakukan dengan dua
tahapan, yaitu :
4.1.1 Simulasi Algoritma Kontroler PID
Ziegler Nichols Gambar 9 menunjukkan hasil simulasi
untaian tertutup dengan memberikan beban
0.5N.m pada Setpoint 1000 Rpm. Simulasi ini
bertujuan untuk mengetahui perilaku kontroler
pada kondisi mendapat beban dan saat beban
dilepas. Pada kondisi ini kontroler harusdapat mempertahankan kecepatan sistem, halini dapat diamati dengan melihat waktu
transien perubahan respon (recovery time)
saat dibebani dan kondisi beban dilepas.Parameter respon sistem dari hasil pengujian
seperti yang ditunjukkan dalam tabel 2.
Tabel 2. Parameter respon sistem hasil
simulasiNo. Parameter PID
1. Settling Time 4.1 detik
2. Maksimum Overshoot 30%Error Steady state 0.2%
4. Rise Time 1.245 detik
5. Delay Time 1 detik
6. Time constan 1.11 detik

5/7/2018 610819 - slidepdf.com
http://slidepdf.com/reader/full/610819 7/9
Ratna Ika Putri, Pengaturan Kecepatan Motor Induksi 3 Fasa, Halaman 1-9
7
Gambar 9. Simulasi Respon Untaian Tertutup
dan Sinyal Kontrol Dengan 2
Beban
4.1.2 Pengujian Kontroler PID Ziegler
Nichols
Jika algoritma kontroler yang telah diujimelalui simulasi menghasilkan respon yang
baik, maka pengujian kontroler dilakukansecara langsung pada sistem. Sebelum
dilakukan pengujian ke sistem, perlu
dilakukan kalibrasi terlebih dahulu antara
perangkat keras seperti ADC, DAC,
tachogenerator dengan program yang dibuat.
Kemudian dilaksanakan pengujian tehadap
kontroler yang dalam hal ini adalah kontroler
PID ziegler Nichols.
Pada saat pengujian sistem dilaksanakan
menggunakan nilai setpoint 1000 rpm dantime sampling yang digunakan sebesar 54 mdt(54 x 10
-3detik). Beban menggunakan
magnetic powder brake dengan cara memutar
panel untuk mengatur beban yang akan
diberikan ke motor. Respon untaian tertutup
sistem dengan kontroler PID ziegler nichols
dengan beban nol ditunjukkan pada gambar
10. Tabel 3 menunjukkan parameter respon
untaian tertutup sistem hasil pengujian dengan
setpoint 1000 rpm tanpa beban.
Gambar 10. Respon Sistem dan Sinyal
Kontrol Dengan Beban Nol
Tabel 3. Parameter Respon SistemNo. Parameter PID Ziegler
Nichols
1. Settling Time 9.450 detik
2. MaksimumOvershoot
35%
3. Rise Time 2.295 detik 4. Delay Time 2.16 detik
5. Time constan 2.295 detik
6. Error Steady state 0.6 %
Untuk mengetahui kemampuan kontroler
dalam mempertahankan kecepatan pada
kondisi beban berubah maka diberikan
beberapa perubahan beban. Gambar 11
menunjukkan hasil pengujian respon untaian
tertutup dengan kontroler PID ziegler nichols
dengan memberikan perubahan beban.Kondisi pertama sistem dibebani sebesar
0.5N.m sedangkan kondisi kedua, beban
0.5N.m tersebut dilepas. Tabel 4
menunjukkan waktu transien perubahan
respon sistem saat dibebani dan pelepasanbeban.
Gambar 11. Respon Sistem dan Sinyal
Kontrol Dengan Beban 0.5N.m
Tabel 4. Perubahan Respon Saat Dibebani
Dan Pelepasan Beban 0.5 N.mNo. Parameter PID
1. t1 4.158 detik
2. t2 1.728 detik
3. t3 2.430 detik
4. t4 3.78 detik
5. t5 1.62 detik 6. t6 2.16 detik
Keterangan :
t1 : waktu transien saat pembebanan hingga
steady state
t2 : Waktu kontrol mendeteksi respon plant
dan menetapkan posisi beban untuk
menaikkan respon ke steady state.t3 : Waktu kontrol mengembalikan ke steady
state saat dibebani
t4 : Waktu transien saat beban dilepas hinggasteady state
5/7/2018 610819 - slidepdf.com
http://slidepdf.com/reader/full/610819 8/9
Jurnal ELTEK, Volume 06 Nomor 01, April 2008 ISSN 1693-4024
8
t5 : Waktu kontrol mendeteksi respon saat
terjadi pelepasan beban menuju ke
steady state
t6 : Waktu kontrol bekeja megembalikan
respon ke steady state saat beban
dilepas.
4.2. Analisis Data Penggunaan kontroler PID ziegler nichols
ini untuk mengatur kecepatan motor induksi
supaya tetap konstan walaupun terjadiperubahan beban. Dengan memasukkan nilai-
nilai parameter PID Ziegler Nichols, setiap
perubahan beban maka kontroler akan bekerjauntuk mempertahankan kecepatan sesuai
dengan setpoint yang telah ditentukan.
Sebelum diimplementasikan, algoritma
kontoller PID ziegler nichols inidisimulasikan terlebih dahulu. Dari hasil
simulasi, pada nilai setpoint sebesar 1000
rpm, motor berputar mencapai nilai yangdiinginkan (setpoint ) dengan waktu tempuh
(settling time) selama 4.1 detik dengan error
steady state sebesar 0.2%. seperti yangditunjukkan pada gambar 9, overshoot hingga
30% dan memiliki sinyal kontrol yang sangat
besar sekali yaitu mencapai 22 volt. Sinyal
kontrol yang terlalu besar sangat sulit untuk
direalisasikan pada sistem sesungguhnya
karena keterbatasan alat.Pada simulasi juga diberikan perubahan
beban seperti yang ditunjukkan pada gambar
9, sistem diberi lebih dari satu kali
pembebanan kemudian setelah steady state beban tersebut dilepas. Bedasarkan hasil
simulasi tersebut menunjukkan bahwa
kontroler memiliki kemampuan pengaturan
yang baik untuk pengaturan kecepatan motorinduksi fasa sehingga dapat mempertahankan
kecepatan motor induksi dengan konstan.
Pada saat di beri beban kecepatan motor akan
mengalami penurunan sesaat, kemudian sinyalkontrol akan dinaikkan secara otomatis yang
akan menyebabkan kenaikan kecepatan
kembali pada nilai setpoint .
Pada implementasi kontroler (closed
loop) dilakukan dengan memberikan setpoint
1000 rpm dan memberikan perubahan beban.Pada kondisi tanpa beban seperti yang
ditunjukkan pada gambar 10, dengan
menggunakan kontroler PID ziegler nicholsmotor berputar dari 0 rpm hingga mencapai
nilai setpoint membutuhkan waktu tempuh(settling time) selama 9.45 detik. Pada PID
ziegler nichols mengalami overshoot hingga
mencapai maksimal overshoot sebesar 35%. Error steady state yang terjadi pada sistem
dengan PID ziegler nichols sebesar 0.6%.
Sedangkan pada saat diberi beban sepertiyang ditunjukkan pada gambar 11, dengan
memberikan setpoint 1000 rpm maka motor
akan berputar dari 0 rpm hingga mencapai
1000 rpm dengan settling time yang sama
pada kondisi tanpa beban yaitu 4.158 detik.
Kemudian setelah respon berada pada daerah
steady state diberi beban sebesar 0.5 N.msehingga respon akan turun di bawah setpoint .
Pada kondisi berbeban demikian putaran
motor akan turun mecapai 920 rpm. Setelahrespon turun akibat pembebanan maka
kontroler akan mendeteksi perubahan
kecepatan tersebut dan menetapkan sebagai
kondisi terbebani, kemudian kontroler bekerjamenaikkan respon menuju setpoint hingga
mencapai steady state dengan menaikkan
sinyal kontrol hingga mencapai 8 volt. Waktu
yang dibutuhkan respon dari kondisi mulai
terbebani hingga mencapai steady state
kembali (recovery time) untuk kontroler PIDziegler nichols ini selama 4.158 detik.
Lamanya recovery time ini juga tergantung
pada karakteristik beban. Pada penelitian ini
menggunakan beban mekanik berupamagnetic powder brake, dimana beban ini
untuk mencapai nilai yang dinginkan(0.5N.m) membutuhkan waktu yang lambat,
sehingga kontroler menjadi lebih lama untuk
mendeteksi kondisi beban.
5. PENUTUP Berdasarkan hasil implementasi,
pengujian dan analisis pada sistem pengaturan
kecepatan motor induksi tiga fasamenggunakan kontroler PID ziegler nichols
dapat disimpulkan:
a. Pada implementasi tanpa beban respon
kecepatan motor dapat mencapai setpoint ,sebesar 1000 rpm, dengan parameter
transien yaitu :settling time (ts) = 9.45
detik, rise time (tr) = 2.295 detik, delay
time (td) = 2.16 detik, time constan = (ז)2.295 detik, error steady state = 0.6% dan
overshoot 35%. Hal ini menunjukkankontroler PID ziegler nichols dapat
memberikan kriteria performansi yang
baik pada pengaturan kecepatan motorinduksi tiga fasa.
b.
Pada implementasi kontroler PID zieglernichols dengan memberikan perubahan
beban kontroler dapat mempertahankan

5/7/2018 610819 - slidepdf.com
http://slidepdf.com/reader/full/610819 9/9
Ratna Ika Putri, Pengaturan Kecepatan Motor Induksi 3 Fasa, Halaman 1-9
9
kecepatan sesuai setpoint dengan recovery
time sebesar 4.158 detik pada saat diberi
beban 0.5 Nm dan pada saat beban
tersebut dilepas memiliki recovery time
sebesar 3.78 detik.
c. Hasil simulasi pada kontroler PID Ziegler
Nichols berbeda jika dibandingkan
dengan hasil implementasi. Hal ini
disebabkan karena pada simulasi kontoller
PID menghasilkan sinyal kontrol yang
sangat besar dan melebihi kemampuanalat untuk di implementasikan, sedangkan
pada kontroler PID ziegler nichols tidak.
d. Respon plant dari hasil simulasi suatualgoritma kontroler tidak dapat Untuk
memperbaiki respon sistem pengaturan
kecepatan motor induksi tiga fasa ini,
maka penentuan parameter Kp, Ki dan Kddi lakukan secara auto tuning sehingga
dapat mengikuti perubahan parameter
plant.
6. DAFTAR PUSTAKABahraim, dkk. 1993. Control System Design
Using Matlab. Prentice Hall. Englewood
Cliffs. New Jersey.Boldea I, Nasar S.A, 1986. Electric Machine
Dynamic. Mac Millan Publishing
Company.Ibrahim Z & Levi E, September 2002.
Comparative analysis of Fuzzy Logic and
PI speed Control in High Performance
AC Drives Using Experimental
Approachi, IEEE TRANSACTIONS ON
INDUSTRY APPLICATIONS, VOL. 38,
NO. 5,Katsuhiko Ogata. 1994. Teknik Kontrol
Otomatik . Alih Bahasa Edi Leksono, Edisi
2, Institut Teknologi Bandung, Erlangga.
Sumanto, 1993. Motor Arus bolak-Balik Motor Sinkron Motor Induksi, Andi
Offset. Yogyakarta.