结构的动力计算
DESCRIPTION
8. 结构的动力计算. 8.1 一般概念. 一、结构的动力荷载及分类. 动力荷载 ,是指荷载的大小、方向、位置随时间 迅速变化 的荷载;它使结构质量产生不容忽视的加速度,使结构发生明显的振动,即在平衡位置附近往返运动。. 静力荷载 ,是指荷载的大小、方向、位置不随时间变化的荷载;. 同时考虑其对结构的影响来看,如果荷载变化极其缓慢,使结构质量产生的加速度可以忽略不计时,仍属于静力荷载. 动力荷载分类:周期荷载、冲击荷载、突加荷载、随机荷载. P ( t ). P ( t ). P. t. t. t. ( 1 )周期荷载:随时间周期性变化的荷载. - PowerPoint PPT PresentationTRANSCRIPT

88
结构的动力计算结构的动力计算

8.18.1 一般概念一般概念一、结构的动力荷载及分类
动力荷载,是指荷载的大小、方向、位置随时间迅速变化的荷载;它使结构质量产生不容忽视的加速度,使结构发生明显的振动,即在平衡位置附近往返运动。
静力荷载,是指荷载的大小、方向、位置不随时间变化的荷载; 同时考虑其对结构的影响来看,如果荷载变化极其缓慢,使结构质量产生的加速度可以忽略不计时,仍属于静力荷载
动力荷载分类:周期荷载、冲击荷载、突加荷载、随机荷载

( 1 )周期荷载:随时间周期性变化的荷载
P(t )
t
P
t
( 2 )冲击荷载:作用于结构上的荷载值在很短的时间内急剧增大或减小的荷载
P(t )
ttr
P
( 3 )突加荷载:在瞬间内将全部重量加于结构或移去的荷载

P(t )
t
( 4 )随机荷载:不能用确定的函数表示,非确定性的荷载
P(t )
t
二、动力计算的内容和研究方法
首先要确定动力计算简图,明确动力荷载的性质和规律,然后进行分析。无论是确定结构的动力特性,或是计算动力反应,都是从研究结构质量的运动规律入手,把质点的位移作为基本未知量,建立体系的运动方程,进行分析。

动静法是根据达朗贝尔( d’Alembert) 原理,设想将惯性力 I(t) 加于振动体系的质点上,则任一瞬时体系中的实有各力与惯性力处于平衡状态
动力特性,是指结构的固有的振动频率,基本振动形式(主振型)和阻尼特性等。这些是结构自身的固有特性,与外部作用因素无关。
动力反应,是指动力荷载作用下,结构产生的内力、位移、速度、加速度等。不仅与荷载的大小、方向、作用位置及其变化规律有关,即是时间的函数;还与结构的动力特性有关。
与静力计算的对比:两者都是建立平衡方程,但动力计算,利用动静法,建立的是形式上的平衡方程。力系中包含了惯性力,考虑的是瞬间平衡,荷载、内力都是时间的函数。建立的平衡方程是微分方程

8.28.2 动力计算简图和动力自由度动力计算简图和动力自由度动力计算中要引入惯性力,因此计算简图要考虑质量的分布
一个动力体系运动过程中确定其任一时刻全部质量位置所需的独立几何参数的数目,为该体系的动力自由度
实际结构的质量都是连续分布的,是无限自由度体系,选取动力计算简图是,常将无限自由度体系化为有限自由度体系。
y(x,t)
EI
L
_
mxm EI
L
2m 3m1m
ty1
_
1 2m
Lm
_
32 4m
Lmm 单自由度体系

EI
L
2m 3m1m 5m4m
ty1 ty2 ty3
_
321 4m
Lmmm
_
54 8m
Lmm
多自由度体系

EI
L
8.38.3 单自由度体系的自由振动单自由度体系的自由振动体系在没有外部动力荷载作用,而由初始位移( y 0 )和初始速度( v 0 )引起的振动,叫做自由振动
一、运动微分方程
根据动静法,建立质点的运动方程,可采用两种方式
(一)动力平衡方程法(刚度法)
取质点隔离体为研究对象,质点所受各力保持平衡

建立运动方程时考虑质点所受的力有:
( 1 )重力 W 为静力荷载( 2 )弹性恢复力
与位移成正比,方向与位移指向相反。 k为刚度系数,其意义是使质点沿位移方向产生的单位位移时所需的在质点上所加的力
( 3 )阻尼力
)]([)( tyyktS jw
)()( tyctR
)()( tymtI
与质点的速度成正比,方向与速度相反。 c 为粘滞阻尼系数
( 4 )惯性力 其大小为质点质量与质点加速度之积,方向与加速度方向相反
y jw
y(t)
m
m
W
)(tS )(tR
)(tI
0)()()( WtStRtI Wtyyktyctym jw )]([)()(
可写出平衡方程:

0)()()( tkytyctym Wky jw 因 ,可得出质点振动的运动微分方程:
当动力位移由质点的静力平衡位置算起时,可不考虑质点的重力
(二)位移方程法(柔度法)
y(t)
m
)(tR)(tI
f (柔度系数)
1P
按动静法,体系的动力位移可看为是由于惯性力和阻尼力静力作用所引起的
可得方程:
)]()([)( tRtIfty 0)(1
)()( tyf
tyctym 柔度系数 f 和刚度系数 k 有如下关系:
kf
1

m
k
mf
12
0)()()( 2 tytym
cty
令 则两种方法所得方程可写成统一形式
二、无阻尼自由振动
单自由度体系无阻尼自由振动的运动微分方程: 0)()( 2 tyty
tCtCty cossin)( 21 它是二阶常系数线性齐次微分方程,其通解为:
常数 C1 , C2 由初始条件确定
vy
yy
)0(
)0(
vC
yC
1
2
设 t=0m
静力平衡位置
质点位移方程:
tv
tyty
sincos)(
(一)运动微分方程解

可知,自由振动由两部分组成:一部分是由初始位移 y 引起,按余弦规律振动;另一部分是初始速度 v 引起,按正弦规律振动。
令
cossin Av
Ay
)sin()( tAty可得:
表示合成运动仍为简谐运动,其中 A 和φ为:
v
ytg
vyA
1
22振幅
初相位
y
-y
T
y
0 t
T
v
v
y
t0
T
y
t0
-A
A

(二)自振周期与频率由运动方程可知自由振动是简谐周期运动
周期2
Tjwy
g
mgf
g
mfm
k
1频率
1 )结构的周期、频率只与结构自身的质量、刚度(柔度)系数有关,与外
因无关,是结构自身的固有的特性,称为固有周期、固有频率;2 )结构的频率与质量的平方根成反比,与结构刚度系数的平方根成正比;3 )结构的固有周期和频率是结构动力性能的重要标志。
例 1 计算结构的频率和周期( EI 为常数)
fm
h
h
EI
hf
3
3
3
3
mh
EI
m
k
EI
mhT
32
2 3

例 2 计算结构的频率和周期
m
EI EI h
1 1
3
12
h
EI3
12
h
EI
k 3
24
h
EIk
3
24
mh
EI
m
k
EI
mhT
242
2 3
(三)质点的振动规律质点的位移、速度、加速度和惯性力分别为:
)sin()( tAty
)sin()()( 2 tmAtymtI )sin()( 2 tAty
)sin()( tAty
(1)当体系处在平衡位置时,加速度及惯性力为零,而速度最大
,0)( ty,0)( tI
,)(max Aty
Aty )(max
2max )( mAtI
2max )( Aty
达到振幅位置时,速度为零,而位移、加速度及惯性力同时达到最大
( 2 )位移、加速度和惯性力同步变化,利用这一性质,可在质点振幅位置建立运动方程,所得运动方程是代数方程而不是微分方程
( 3 )弹性力指向永与位移方向相反,而惯性力永与位移方向相同
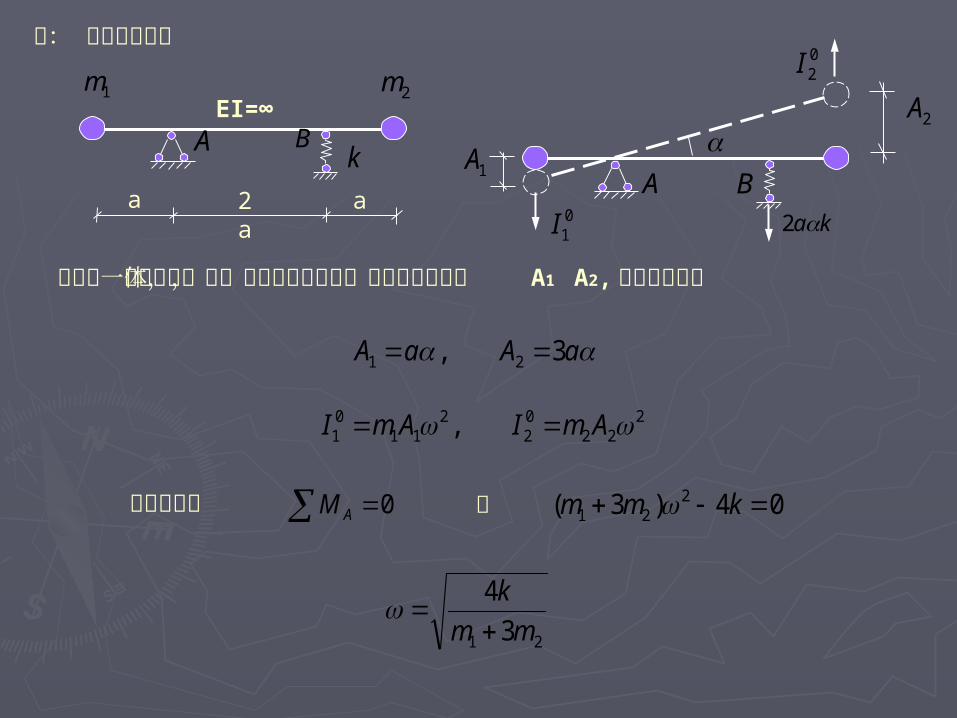
例: 求图示梁频率
1A
01I
2A
02I
此梁为一个自由度体系,振动达到幅值时,两质点的振幅为 A1 A2, 惯性力幅值为
222
02
211
01 , AmIAmI
aAaA 3, 21
ka2
由平衡方程 0 AM
1m 2mEI=∞
2aa a
kA B
A B
04)3( 221 kmm 即
21 3
4
mm
k

二、阻尼对自由振动的影响实验证明,振动中的结构,不仅产生与变形成比例的弹性内力,还产生非弹性的内力。
事实上,由于非弹性力的存在,自由振动会衰减直到停止,非弹性力起着减小振幅的作用,使振动衰减,最后停止振动。
有阻尼的自由振动运动微分方程: 02 2 yyy
m
c
2阻尼比
当 ξ ≥1 时,体系的运动为非振动状态;
当 ξ < 1 时,称为低阻尼,体系呈振动运动。
当 ξ < 1 ,及初始条件 00 )0()0( vyyy 、
方程可解为: )sincos()( tyv
tyety rr
rt
或 )sin)( tAety rt (
yv
ytg
yvyA r
r
1
2
2 ,其中

y
t0
yk yk+1
tAe
rrT
2
ktk Aey 第 k 个振幅为
经过一周期相邻两振幅比值
r
rk
kT
Tt
t
k
k eAe
Ae
y
y
)(
1
阻尼比 ξ 越大,振幅衰减越快;振幅按等比级数递减
可通过试验的方法测算阻尼比
2
2ln
1
r
rk
k Ty
y
由自由振动试验曲线量测出任何相邻的两个振幅,算出对数衰减率 δ ,则可求得阻尼比
mc
2
2
可用相隔 i 个周期的两个振幅计算 δ ,可提高 ξ 精确度
iTiy
yr
ik
k 2ln i
2

8.48.4 单自由度体系的受迫振动单自由度体系的受迫振动
体系在振动过程中有动力荷载 P(t) 或支座运动等外部干扰作用时,其振动称为受迫(或强迫)振动。
m
)(tP
y(t)m
)(tS
)(tR )(tI
)(tP
由质点的平衡可得: )()()()( tPtkytyctym
m
tPtytyty
)()()(2)( 2 或: 单自由度体系强
迫振动的振动微分方程
若体系的动力荷载不在质点上作用
m)(tP
y(t)
一、运动微分方程

f 11
1
f 1P
1
由位移方程可得:
)()]()([)( 111 tPftRtIfty P
即
)()(1
)()(11
1
11
tPf
fty
ftyctym P
或
m
tPtytyty e )()()(2)( 2
)()(11
1 tPf
ftP P
e
二、简谐荷载下的无阻尼受迫振动
设单自由度体系在质点上作用简谐荷载为:tPtP sin)(
扰力幅值 荷载频率不考虑阻尼,振动微分方程:
tm
Ptyty sin)()( 2
上式中:
)(tP
)(tR )(tI
my(t)

(一)质点的位移方程
齐次解: tCtBty sincos)(1 特解: tDty sin)(2
将特解及其二阶导数代入振动微分方程中可确定:
)1( 22
m
PD 频比,扰力频率与自振频率比
质点位移方程为齐次解和特解之和:
tm
PtCtBty
sin
1
1sincos)(
22
设零初始条件,即 0)0(,0)0( yy ,0t)1(
0
22
m
PC
B最后 )sin(sin
1
1)(
22tt
m
Pty
质点的位移方程
由上式可以看出,振动是由两部分合成的;式右第一项是按荷载频率 θ 的振动。第二项是按自振频率ω的振动。后一部分是由荷载作用引起的称为伴生自由振动。实际上由于存在阻尼,伴生自由振动在短时间内即行消失,最后剩下的仅按荷载频率变化的振动,称为纯强迫振动。在振动开始两种振动共存阶段,称作过渡阶段,以后的纯强迫振动称为平稳阶段或稳态强迫震动。

(二)稳态强迫振动的动力反应质点的位移方程: t
m
Pty
sin
1
1)(
22 振动频率和荷载频率
相同,二者完全同步
振幅 jpym
PA
22 1
1
Pfm
Py jp
221
1
动力系数 扰力幅值产生的静位移
动力系数:最大动力位移与相应静力位移的比值,是衡量动力反应大小的重要指标
1
0
2
3
1 2 3
β
μ当 β →0时 , μ →1 ,荷载变化得很慢,可当作静荷载处理当 0< β <1时 , μ >1 ,并且随 β的增大而增大当 β =1时 , μ = ∞ 。即当荷载频率接近于自振频率时,振幅会无限增大。称为“共振”当 β >1时 , μ的绝对值随β的增大而减小,且为负值,质点的位移和扰力的指向相反

( 1 )单自由度体系
( 2 )受简谐荷载作用
( 3 )荷载位于质点上
当求结构的最大动力反应时,可用乘以动力系数的扰力幅值 P代替扰力幅值 P 与惯性力幅值 作用,用静力方法计算。
0I
PP
m
PmP
ymPAmPIP jp
2
222
220
1
1
1
1
例 1 :已知 m=300kg , EI=90×105N.m2 ,k=48EI/l3 ,P=20kN,θ=80s-1 ,求梁中点的位移幅值及最大动力弯矩。
l/2
EI
l/2
tP sin
m解: 1)求 ω EI
l
EI
l
EI
lf
192
5
19248
333
13
16.1345
1921 sml
EI
mf
2)求 β
552.11
122
3)求 ymax , Mmax
mEI
lPPfy 3
5
333
max 1075.51090192
451020552.1
192
5
mkNlPM 04.31420552.14
1)(
4
1max
体系满足前面的条件时,不仅荷载、质点位移和惯性力同步变化,而且各种的动力反应的动力系数 μ相同 ,故可利用 μ求体系的动力反应。

例 2 : 图示简支梁跨中有一集中质量 m ,支座 A 处受动力矩Msinθt 作用,求质点的动位移和 A 的动转角的幅值。
解:体系的动力荷载 Msinθt 不是作用在质点,因而不能直接利用 μ求动位移,可由建立体系的振动方程来求解。
EI
l/2 l/2
mMsinθt
BA
1
1
1
M1
M2
1 )设惯性力和动力荷载分别为单位力和单位力偶作用在体系上,并作出相应的弯矩图 M1 M2 l/4
2 )质点的动位移是惯性力 I (t) 和动力荷载共同作用下产生的,按叠加原理表示为
EI
lff
EI
lf
EI
lf
16;
3;
48
2
211222
3
11
tMftIfty sin)()( 1211 tMftymf sin)]([ 1211
将柔度系数代入上式,并整理得
tm
Ptyty sin)()( 2
32 48
ml
EI
式中:
自振频率
l
MM
f
fP
3
11
12 等效荷载幅值
运用图乘法可得:

由质点位移方程可得,受迫振动的稳态解为:
tm
Pty
sin
1
1)(
22
tEI
Ml sin16
2
3) 支座 A 处的动转角也是由惯性力 I (t) 和动力荷载共同作用下产生的,按叠加原理表示为:
tMftIftA sin)()( 2221 tMftymf sin)]([ 2221
将 y(t)求二阶导数代入上式,可得: tMfPftA sin)()( 222
2
21
将柔度系数和 代入可得: l
MP
3
质点的动位移幅值为 其中 为动荷载
幅值 M 所引起的质点静位移 yjp,μ 为动力系数。
EI
Ml
16
2
EI
Ml
16
2

tEI
MltA
sin11
16
9
3)(
2
2
2
2
tEI
Ml
sin
1
167
1
3 2
2
tEI
Ml sin3
支座处动转角幅值为 其中 为动荷载
幅值 M 所引起的静转角, 为动力系数。
EI
Ml
3
2
EI
Ml
3
上例表明,动荷载不作用在质量上时,质点的位移的动力系数和支座处动转角的动力系数是不同的,即体系不能用统一的动力系数表示
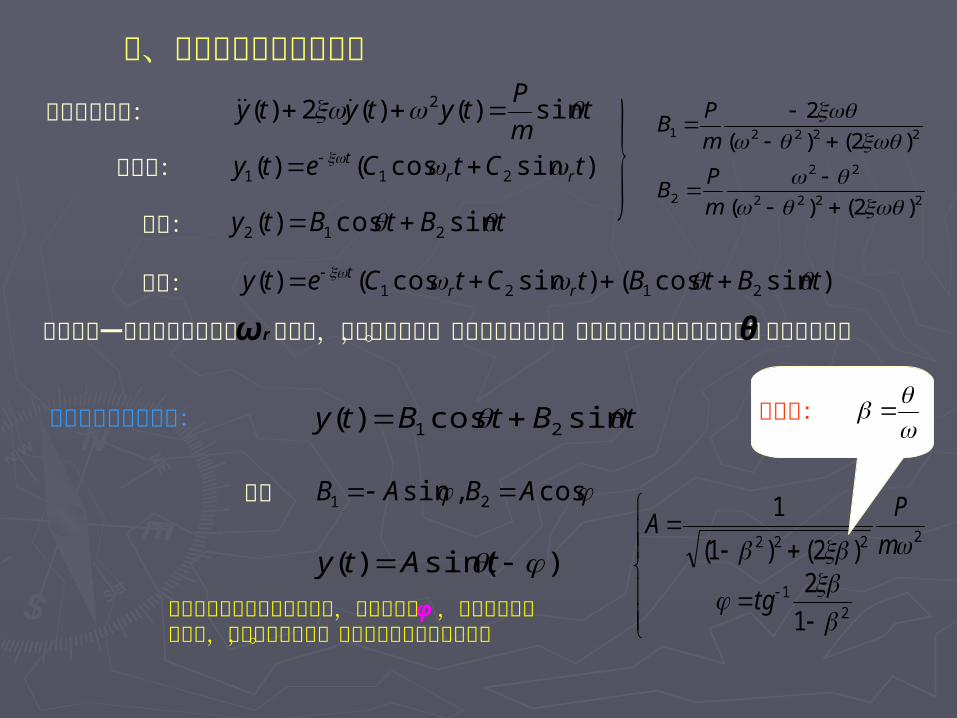
三、阻尼对受迫振动的影响
振动微分方程: tm
Ptytyty sin)()(2)( 2
齐次解:
特解:
)sincos()( 211 tCtCety rrt
tBtBty sincos)( 212 2222
22
2
22221
)2()(
)2()(
2
m
PB
m
PB
全解: )sincos()sincos()( 2121 tBtBtCtCety rrt
cos,sin 21 ABAB
)sin()( tAty
2
1
2222
1
2)2()1(
1
tg
m
PA
与无阻尼的质点位移方程相比,多了相位差φ,质点随仍为简谐振动,但与荷载不同步,位移变化之后于荷载变化。
上式右第一大项是按自振频率ωr 的振动,由于存在阻尼,这部分很快消失。余下的第二大项是按扰力频率θ 的纯强迫振动
纯强迫振动位移方程: tBtBty sincos)( 21
如令
频率比:

222 )2()1(
1
动力系数:
1 ) μ曲线随阻尼比增大而趋于平缓,在 β =1 附近 μ 值降低比较快。
2 )当 β =1 时,有阻尼情况 μ≠∞
振幅 A 可写为: jpyA
1 2
β
1
0
2
3
μ
ξ=0.2
ξ=0.3
ξ=0.5
ξ=0
ξ=1.0
阻尼使动力系数减小,动力系数 μ 与频率比 β及阻尼比 ξ 有关:
此时动力系数为:
2
1
而最大动力系数不是在 β =1 处,而是在 β 值略小于 1 处
由 0
d
d 221
得2max
12
1

四、在任意动力荷载作用下受迫振动
体系在静止状态突然作用荷载 P ,停留时间 dt 。则瞬时冲量 Pdt 引起的振动可视为由初始条件引起的自由振动。
m
Pdtdv
dt
dvmP
dt 时间内的平均速度:
2)(2
dtm
Pdtvdy
任意动力荷载作用下体系的动力反应,可用瞬时冲量作用的反应推导。
m
Pdtdvv
2)0(
2
1
(一)瞬时冲量的反应
由动量定理可得:
t=dt 时的速度:
t=dt 的位移:
P
P(t)
t
P
dt
Pdt

当 t >dt后,体系的振动相当于以 d v 和 d y为初始条件的自由振动,即取:
m
Pdtvy 00 ,0
由自由振动方程可得 t >0 时的位移反应:
tm
Pdtty
sin)(
)(sin)(
)(
tm
dPty
略去 dt 的二阶微量的作用
上式是在 t=0 时的作用瞬时冲量的反应,如果在 t =τ时作用瞬时冲量 P(τ)d τ
则有 t >τ 时的位移反应 :P(t)
t
P(τ)
dτ
P(τ)dτ
τ

dtPm
tyt
0
)(sin)(1
)(
杜哈梅( Duhamel )积分
上式为初始处于静止状态的无阻尼单自由度体系受任意动力荷载作用下计算质点位移的一般公式。
考虑阻尼,则杜哈梅积分为
dteP
mty
t
rt
r
0
)( )(sin)(1
)(
初始位移 y0 和初始速度 v0 不为零在任意荷载作用下的位移公式 :
dtPm
tv
tytyt
0
00 )(sin)(
1sincos)(
P(t)
tτ
tdτ
P(τ )d τ
任意荷载作用可看作一系列连续的瞬时冲量 P(τ)dτ 所组成。将每个瞬时冲量的微分反应叠加,可得时刻 t 的总反应
(二)任意荷载作用的反应

例 单自由度体系在零初始条件下,质点上受到图示的短时突加荷载作用,求质点的位移反应。
P(t)
ttd
P
解: 荷载表达式为
)(tP
)0(,0 t
)0(, dttP
)(,0 dtt
计算分两个阶段
突加荷载位移反应
1 )当 时,将荷载表达式代入杜哈梅积分,得dtt 0
dtPm
tyt
0
)(sin1
)(
)cos1( tm
P
)cos1( ty jp
jpyty 2)(max
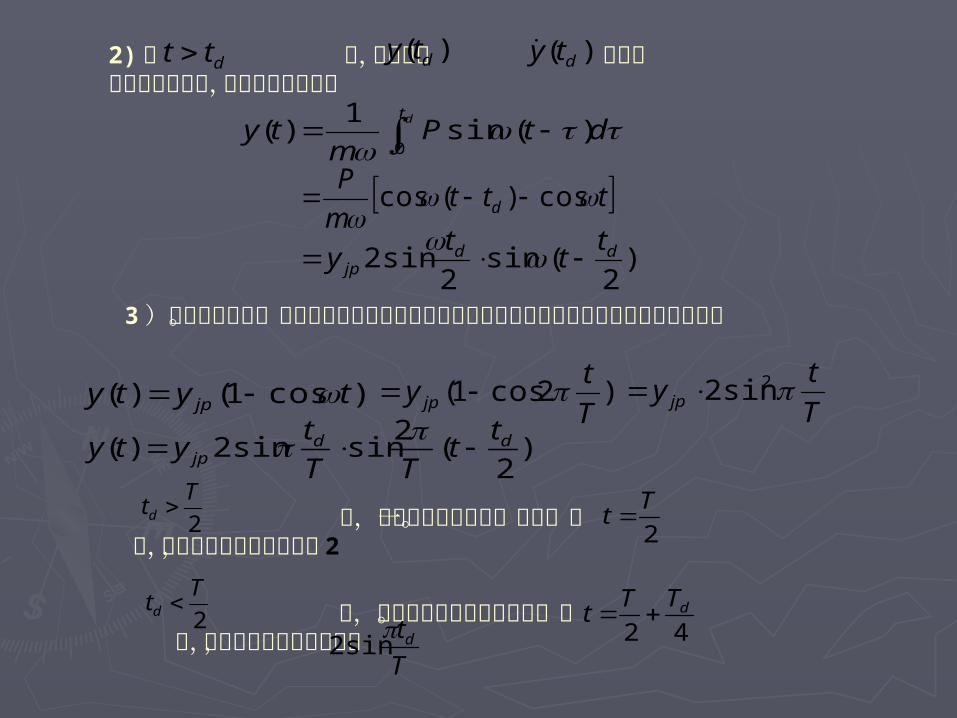
2)当 时,为由位移 和速度 引起的自由振动,由杜哈梅积分可得
dtt )( dty )( dty
dtPm
tydt
0
)(sin1
)(
tttm
Pd
cos)(cos
)2
(sin2
sin2 ddjp
tt
ty
3 )最大反应分析。若将上述两个阶段的位移反应表达式中的频率换以周期来表示则分别为
)cos1()( tyty jp )2cos1(T
ty jp
T
ty jp 2sin2
)2
(2
sinsin2)( ddjp
tt
TT
tyty
2
Ttd
2
Tt 时,最大位移发生在第一阶段。当 时,有最大位
移,动力系数为 2
2
Ttd
42dTT
t 时,最大位移发生在第二阶段。当 时,有最大位移,动力系数为
T
tdsin2

8.58.5 两个自由度体系的自由振动两个自由度体系的自由振动一、运动微分方程
(一)位移方程法(柔度法)m1
m2
y1(t)
y2(t)
在自由振动过程中任意时刻 t ,质量 m1 、
m2 的位移 y1(t) 、 y2(t) 可看做体系在当时惯
性力 I1 、 I2 作用下的静力位移。
1221111 )()()( ftIftIty
2222112 )()()( ftIftIty
0)()()( 122211111 ftymftymty
0)()()( 222221112 ftymftymty
可得两个自由度体系自由振动微分方程: 1 f 11
f 22f 21
f 12
1
I1
I2

S2
S1
m1
m2
y1(t)
y2t)
m1
m21
1
沿两个自由度方向截取包括相应质量的两个隔离体,各隔离体上作用相应的弹性力和惯性力,建立平衡方程。从而的振动微分方程
0)()( 11 tStI0)()( 22 tStI
两个自由度体系自由振动微分方程
(二)动力平衡方程法(刚度法)
I1
I2
k11
k22
k12
k21
)]()([)( 2121111 tyktyktS )]()([)( 2221212 tyktyktS
0)()()( 21211111 tyktyktym 0)()()( 22212122 tyktyktym

(一)体系的固有振动
体系中各质点按同频率、同相位的简谐振动,称为固有振动,又叫同步振动。其振动频率叫结构的固有频率。
n 个自由度体系有 n 个固有频率。与每个固有频率相应,体系的振动有一定的振动形式,称作结构的固有振型,又叫主振型,或简称振型。
对于两个自由度体系的固有振动,微分方程式的解为:
)sin()(
)sin()(
22
11
tAty
tAty
将上式代入两个自由度体系的振动微分方程中,可得:
二、固有振动及固有频率、主振型的确定
结构的固有频率和主振型是结构的重要动力特性,固有振动或自由振动分析的目的就是确定结构的固有频率和主振型

固有振动基本方程为关于振幅的 A1 、 A2齐次方程,振幅不会全为零,则其系数行列式必为零,可得:
0)(
)()(
22
2221
1212
112
mkk
kmkD
0)
1(
)1
()
1(
2222211
1222111
2
fmfm
fmfmD
或
(二)体系的固有频率
或
固有振动基本方程
0)1
( 222221211 AfmAfm
0)1
( 212212111 AfmAfm 0)( 21211
211 AkAmk
0)( 222
22121 AmkAk
频率方程

可解得两个固有频率ω1 和ω2 。其中数值较小的为ω1 ,称为第一频率或基本频率,数值较大的为ω2 ,称作第二频率
0)()( 212221121222111
2 fffmmfmfm
2
12212
2221112221112
1 4)()(2
1fmmfmfmfmfm
0))(( 211222
2212
11 kkmkmk
21
21122211
2
2
22
1
11
2
22
1
112
2
21
2
1
2
1
mm
kkkk
m
k
m
k
m
k
m
k
频率方程展开,并考虑 f12=f21 ,且令 ,可得:2
1
或
上式可求得两个实根,为:
或

(三)体系的主振型
由固有振动
)sin()(
)sin()(
22
11
tAty
tAty可得 常数
2
1
2
1
)(
)(
A
A
ty
ty
体系振动过程中,质点的位移大小虽然不断变化,但两个质量位置的之比始终相等,即振动形式是确定不变的,故可用振幅之比表示体系的主振型。
两个自由度体系有两个固有频率,每个固有频率与一个特定的振动形式即主振型相对应。已求出ω1 ω2 后,可利用振动基本方程来求出各振幅比值,从而确定主振型。
1由
2由
1112
1
12
122
11121
)1(1
)1(2
1
1
km
k
fm
fm
A
A
1112
2
12
122
11122
)2(1
)2(2
2
1
km
k
fm
fm
A
A

(四)主振型的正交性
柔度系数的副系数 f12=f21 及刚度系数的副系数 k12=k21 是有正负号的,因此,求出的振幅比及相对振幅值也可有正号或负号。
关于正负号的规则是,在计算开始时,先规定位移 y1(t) 及 y2(t) 的正方向,求柔度系数的单位力及求刚度系数的单位位移均按位移 yi(t) 的正向施加,则求得的柔度系数 fij 或刚度系数 kij 指向与 yi(t)正向相同者为正,反之为负。
主振动是简谐自由振动,位移和惯性力同时达到幅值。
第一主振型可看做相应惯性力幅值ω12m1A 1
(1) 和ω12m2A 2
(1) 作用所产生的静力位。
第二主振型可看作相应惯性力幅值ω22m1A 1
(2) 和ω22m2A 2
(2) 作用所产生的静力位移。
m1 m2

)1(2
)2(2
222
)1(1
)2(1
221
)2(2
)1(2
212
)2(1
)1(1
211 )()()()( AAmAAmAAmAAm
整理得:
0))(( )2(2
)1(22
)2(1
)1(11
22
21 AAmAAm
21 因 ,则存在:
0)2(2
)1(22
)2(1
)1(11 AAmAAm
主振型的正交条件
)1(12
21 Am )1(
2221 Am
)1(1A )1(
2A
)2(11
22 Am
)2(22
22 Am
)2(1A
)2(2A
m1
m2
对两个状态应用虚功互等定理,有
第一主振型 第二主振型
m1 m2

例 1 求图示结构自振频率和振型。
m
m
l/2
l/2 l/2
EI
k=3EI /l3
A
B E
D
解:体系为静定结构,有两个自由度
1 )求柔度系数,由图乘法和弹簧内力虚功计算,得
l /2
1/2
1
l /4
1
1/2
M1
M2
EI
lff
EI
lf
EI
lf
96
11,
96
10,
96
20 3
2112
3
22
3
11
2 )求自振频率,代入两个自由度体系自由振动的频率方程,得
令: 33
96
ml
EI
则: 0)10(11
11)20()(
D
展开并解得:
917.2,083.27 21
0)
1
96
10(
96
1196
11)
1
96
20(
)1
(
2
33
3
2
3
2
mEI
l
EI
lEI
lm
EI
l
D

31
31 883.196
ml
EI
ml
EI
可得相应的频率:
3 )求振型并绘振型图
644.011
20
1
1
122
11121
)1(1
)1(2
1
fm
fm
A
A当 λ1= 27.083 时,
553.111
20
1
2
122
11122
)2(1
)2(2
2
fm
fm
A
A当 λ2= 2.917 时,
32
31 737.596
ml
EI
ml
EI
1
0.644
1
1.553
第一振型 第二振型

8.68.6 一般多自由度体系的自由振动一般多自由度体系的自由振动
m1
mn
mi
m2
yi(t)
y2(t)
yn(t)
y1(t)
一、运动微分方程
(一)柔度法方程
n 个自由度体系自由振动的某一个时刻质点 mi 产生的位移为 yi(t) ,此位移可看作由各质点加上惯性力 静力作用产生的,可得 n 个自由度体系自由振动微分方程
)()( tymtI iii
0)()()()(
0)()()()(
0)()()()(
111
111
1111111
tyftymftymftym
tyftymftymftym
tyftymftymftym
nnnnnniiin
iinnniiiii
nnniii
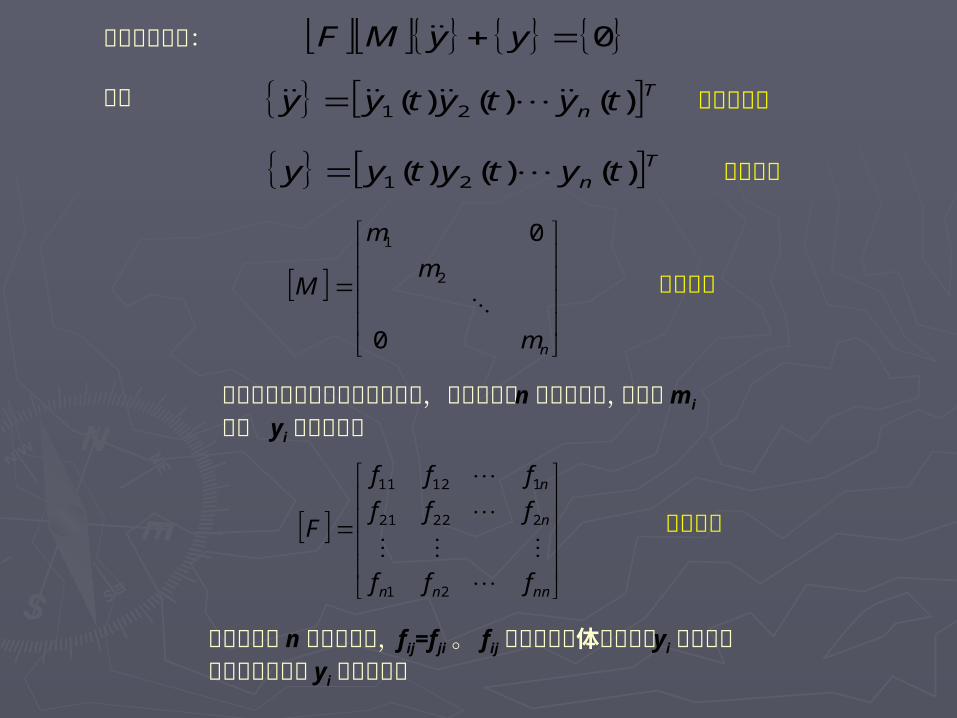
写成矩阵形式: 0 yyMF
其中 Tn tytytyy )()()( 21 加速度列阵
Tn tytytyy )()()( 21 位移列阵
nm
m
m
M
0
0
2
1
质量矩阵
nnnn
n
n
fff
fff
fff
F
21
22221
11211
柔度矩阵
柔度矩阵为 n阶对称方阵, fij=fji 。 fij 的意义是沿体系的位移 yi 方向加单位力所产生的沿 yi 方向的位移
当仅考虑质量的移动惯性作用时,质量矩阵为n阶对角方阵,其元素 mi 为沿 yi 方向的质量

(二)刚度法方程仿照两个自由度体系的自由振动微分方程,可写出 n 个自由度体系自由振动微分方程
0)()()()(
0)()()()(
0)()()()(
11
11
1111111
tyktyktyktym
tyktyktyktym
tyktyktyktym
nnnininnn
niniiiiii
nnii
写为矩阵方程: 0 yKyM
其中:
nnnn
n
n
kkk
kkk
kkk
K
21
22221
11211
刚度矩阵
刚度矩阵为 n阶对称方阵, kij=kji 。 kij 的意义是使体系沿 yj 方向产生单位位移、沿其他位移方向的位移为零,所引起的附加约束 i 方向的力

二、固有振动特性的确定
(一)基本方程设 n 个自由度体系自由振动仍为简谐振动,各质点位移为:
),,2,1()sin()( nitAty ii
即 )sin( tAy
TnAAAA 21振幅列阵
将上式及其二阶导数代入微分方程,整理后得 n 个自由度体系自由振动基本方程:
01
2
AEMF
或
02 AMK
其中 [E] 为 n阶单位矩阵

(二)固有频率基本方程是振幅的齐次方程,振幅不会全为零,因此有
01
2 EMF
或
02 MK
上两式即为频率方程。展开行列式为ω2 的 n次代数方程,即可得 n个固有频率ωi
将个频率由小到大排列,ω1 、ω2…… ωi ,称为频率谱,其中ω1最小称为第一频率或基本频率。由此可知, n 个自由度体系有 n 个固有频率
(三)主振型与每一个固有频率对应都有一个主振型。由自由振动基本方程不能唯一确定主振型的各振幅值,只能确定主振型的形状。为了使表示主振型的相对振幅有确定的值,需要对定某种条件,如此确定的主振型称为规准化主振型,一种简单的表示方法是规定振幅列阵种某个元素值为 1 ,如令第一个元素为 1 。这样的主振型叫做归一化主振型。

如令振幅列阵中第一个元素 A1(i), 则主振型列阵为:
)()(3
)(2
)( 1 in
iii
采用规准化主振型,自由振动基本方程可写为
01
2
EMF
或 02 MK
(四)主振型的正交性对第 i 主振型和第 j 主振型,有 )(0)(
2 aMK ii
)(0)(2 bMK jj
用 {φ}T( j )前乘( a )式和 {φ}T
( i )前乘( b )式 )(0)(
2
)(cMK ii
T
j
)(0)(2
)( bMK jjTi

式( c )转置后其值不变,为
0)(2
)( i
Ti
TT MKi
[K] 和 [M]皆是对称方阵,有 MMKK TT ,
上式可改为 )(0)(2
)(eMK ii
T
i
式( e )减式( d ),整理后得
0)( )()(22 j
Tiji M
当ωi≠ωj 时,得到
0)()( jTi M 主振型的第一正交条件
将第一正交条件代入式( d )可得到
0)()( jTi K 主振型的第二正交条件

8.78.7 多自由度体系在简谐荷载下的多自由度体系在简谐荷载下的 受迫振动受迫振动
yi(t)y2(t)
yn(t)
y1(t)
P1(t) P2(t)Pi(t) Pn(t)
fiif2i
fni
f1i
1
P1 P2 Pi
ΔiPΔ2P
ΔnP
Δ1P
一、运动微分方程设 n 个自由度体系中在各质点上沿质点运动方向作用有简谐荷载 tPtP ii sin)(
任一质点位移可表示为:
iPinniiiii yftIftIftIty )()()()( 11
其中
t
tPf
tPfy
tymtI
iP
jij
jijiP
iii
sin
sin
)(
)()(
ΔiP为各扰力幅值在 yi方向产生的静力位移
m1 mnmim2