ロボットのための認知的インタラクションデザイン(今井 倫太)
TRANSCRIPT

15/05/24
1
ロボットのための認知的インタラクションデザイン
慶應義塾大学 今井 倫太
自己紹介
• 1983-‐1994 慶應義塾大学 理工学部出身 • 1994-‐ NTT ヒューマンインタフェース研究所 • 1997-‐ ATR 知能映像通信研究所 出向 • 2002-‐ 慶應義塾大学 理工学部 • 現在、理工学部情報工学科 教授
14/12/19 今井@慶應 2

15/05/24
2
今日のお話
• 人とロボットのインタラクション • コミュニケーションにロボットを用いる意義 • ロボットとのコミュニケーションの難しさ • ロボットのコミュニケーションのデザイン • ロボットの社会性を考える
14/12/19 今井@慶應 3
人とロボットのインタラクション
• ハードコアな人工知能研究 – 自律して判断し動く – 勝手に学習して賢くなる – 人の知能を実現する
• 現実的な人工知能研究 – 探索アルゴリズム – 推論アルゴリズム – 知識表現と知識ベース – Etc.
ロボットとのインタラクションを 考えて研究するさには、ある程度 未来を想定している。 (もちろん、ここで得られる技術が、 現在のシステムやサービスに 応用できる物は沢山ある)
14/12/19 今井@慶應 4

15/05/24
3
コミュニケーションにロボットを用いる意義
• コミュニケーション (会話の場面)を考えよう
14/12/19 今井@慶應 5
コミュニケーションにロボットを用いる意義
• u[[I AM SITTING]]e – u 談話状況: 話し手は誰か, 何時, 何処で, どんな
発話文を話しているか, 誰に向かって話しているか.
– e 記述状況: 何処で何が起きているか
文の意味とは、談話状況と記述状況の関係
– in u: at l: speaks, a; yes – in e: at l: sits, a; yes
14/12/19 今井@慶應 6

15/05/24
4
コミュニケーションにロボットを用いる意義
u[[I AM SITTING]]e
in e: at l: sits, a; yes
I am siFng.
Miss a
in u: at l: speaks, a; yes referring-‐to,Miss a, I,a;yes
14/12/19 今井@慶應 7
コミュニケーションにロボットを用いる意義
• ロボットは、談話状況を提示しやすい – 話し手 – 聞き手 – 話題対象
14/12/19 今井@慶應 8
15/05/24
5
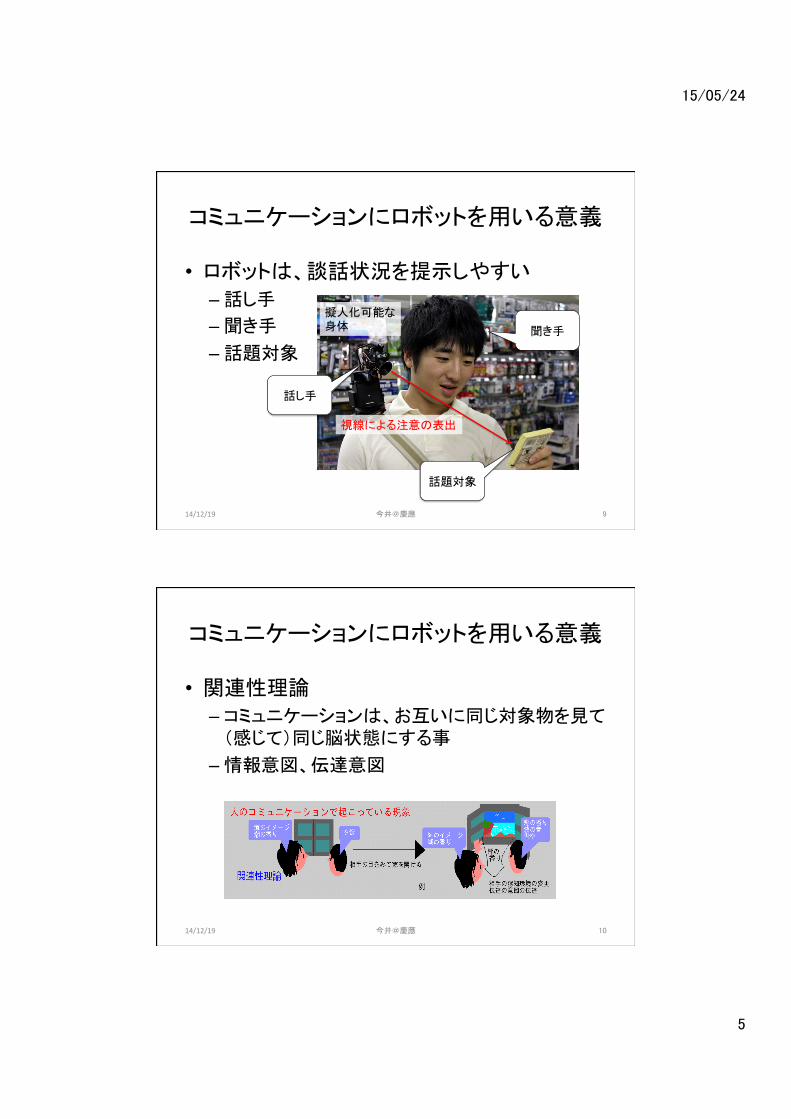
コミュニケーションにロボットを用いる意義
• ロボットは、談話状況を提示しやすい – 話し手 – 聞き手 – 話題対象
聞き手
話し手
視線による注意の表出
話題対象
擬人化可能な 身体
14/12/19 今井@慶應 9
コミュニケーションにロボットを用いる意義
• 関連性理論 – コミュニケーションは、お互いに同じ対象物を見て
(感じて)同じ脳状態にする事 – 情報意図、伝達意図
14/12/19 今井@慶應 10

15/05/24
6
コミュニケーションにロボットを用いる意義
• 共同注意 – 同じ物を見て、注意を共有する – 社会的なインタラクションの基礎 • 相手の心を読むのに必要
– 発達心理学 • 子供が母親から言葉を覚える ときに重要 • 自閉症児の研究
14/12/19 今井@慶應 11
コミュニケーションにロボットを用いる意義
共同注意
14/12/19 今井@慶應 12

15/05/24
7
コミュニケーションにロボットを用いる意義
• 擬人化可能なロボットは、 – 談話状況を作るのに有利。 – 関連性理論を適応する相手とみなしてもらいやす
い。 – 上記を支える共同注視を人と構成しやすい。
14/12/19 今井@慶應 13
ロボットとのコミュニケーションの難しさ
• ロボットが人と会話しているシーンを想像してください – ロボットは、どのような能力が必要でしょうか?
14/12/19 今井@慶應 14

15/05/24
8
ロボットとのコミュニケーションの難しさ
14/12/19 今井@慶應 15
ロボットとのコミュニケーションの難しさ
Rela%on
14/12/19 今井@慶應 16
15/05/24
9
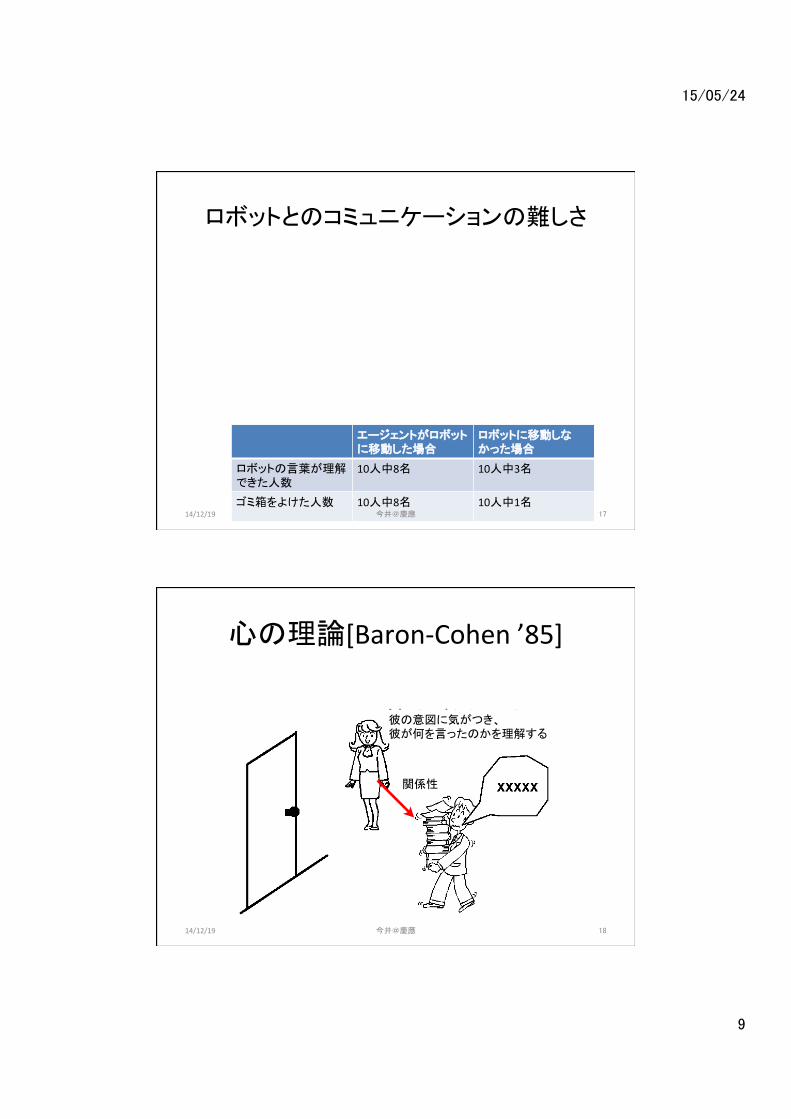
ロボットとのコミュニケーションの難しさ
エージェントがロボットに移動した場合
ロボットに移動しなかった場合
ロボットの言葉が理解できた人数
10人中8名 10人中3名
ゴミ箱をよけた人数 10人中8名 10人中1名 14/12/19 今井@慶應 17
心の理論[Baron-‐Cohen ’85]
Relation
Notice his intention What he said.
彼の意図に気がつき、 彼が何を言ったのかを理解する
関係性
14/12/19 今井@慶應 18

15/05/24
10
心の理論[Baron-‐Cohen ’85]
Xxxx....
Relation
Notice robot’s intention What it said.
ロボットの意図に気がつき、 ロボットが何を言ったのかを理解する
エージェントの移動による 関係性
14/12/19 今井@慶應 19
ロボットのコミュニケーションのデザイン
何気ない身体表現が重要
14/12/19 今井@慶應 20

15/05/24
11
ロボットのコミュニケーションのデザイン
視線を動かした場合 視線を動かさない場合
10名全員が、「これ」をポスータと答えた
10名中9名は、「これ」をロボットの手の先だと思った
14/12/19 今井@慶應 21
ロボットのコミュニケーションのデザイン • 同時に動かす視線
14/12/19 今井@慶應 22

15/05/24
12
ロボットのコミュニケーションのデザイン
14/12/19 今井@慶應 23
ロボットのコミュニケーションのデザイン
• 人間の五感を利用した演出 – 同じ状況に対して同じ感覚を持たせる
• 二つの演出ステッップ
14/12/19 今井@慶應 24
15/05/24
13
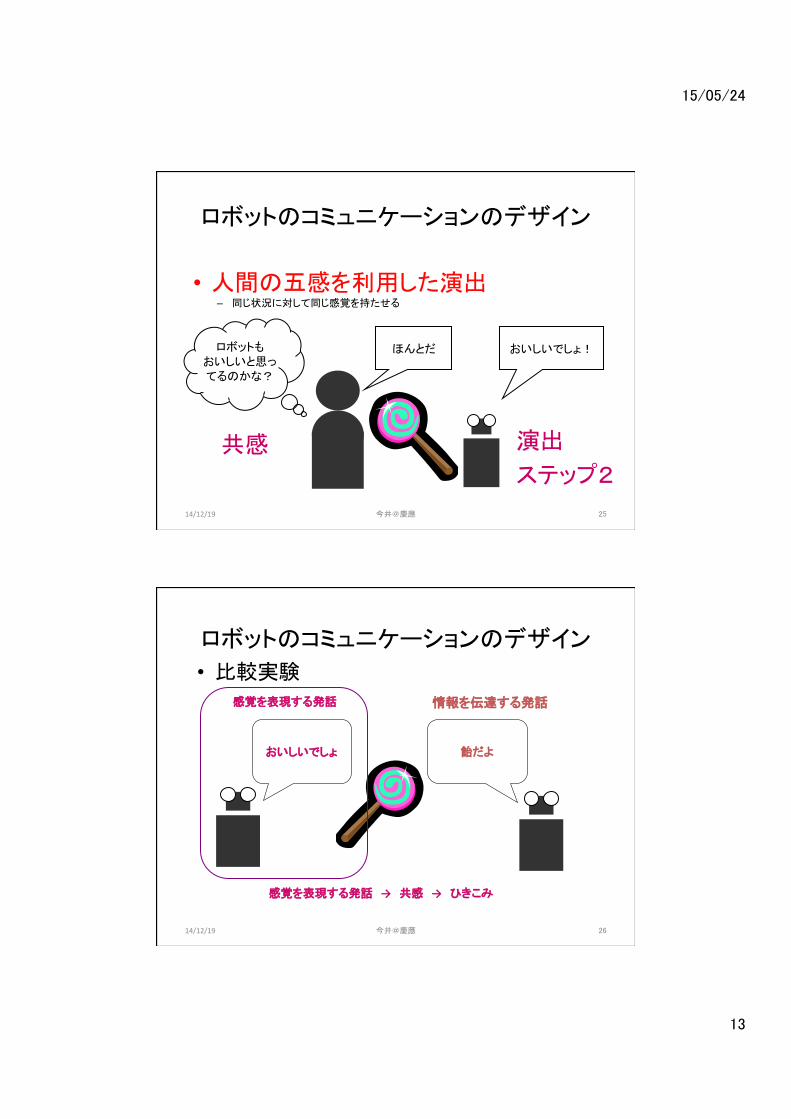
ロボットのコミュニケーションのデザイン
• 人間の五感を利用した演出 – 同じ状況に対して同じ感覚を持たせる
ロボットも おいしいと思ってるのかな?
ほんとだ おいしいでしょ!
共感 演出 ステップ2
14/12/19 今井@慶應 25
ロボットのコミュニケーションのデザイン • 比較実験
おいしいでしょ 飴だよ
感覚を表現する発話 情報を伝達する発話
感覚を表現する発話 → 共感 → ひきこみ
14/12/19 今井@慶應 26

15/05/24
14
• 感覚的発話による共感のモデル
ロボットのコミュニケーションのデザイン
物体 感覚
センサ センサ
ロボットの言葉
感覚? 心を読む
objects in real world
感覚的発話
情報発話
14/12/19 今井@慶應 27
共感前
ロボットのコミュニケーションのデザイン • 実験仮説
ロボットからの感覚的発話によって「ロボットと共感した」と感じた 被験者は、ロボットとのコミュニケーションを作為的にとらえず コミュニケーション自体に集中できる
これは実験だ
共感後 !! !?
おいしいね
共感
14/12/19 今井@慶應 28

15/05/24
15
ロボットのコミュニケーションのデザイン • 被験者:男女の大学生21名を、実験群11名・対照群10名に
ランダムに配分 • 実験環境:大学の教室内にロボットと小道具などを配置
window
entrance exit
14/12/19 今井@慶應 29
ロボットのコミュニケーションのデザイン
• シナリオ 実験群(感覚的) 対照群(情報伝達)
冷たいでしょ
晴れだよ あったかいね
爽健美茶だよ
おいしいでしょ キットカットだよ
天気
お茶
お菓子
景色
おみやげ
いい眺めでしょ
あげるね
シナリオの違いにより検証
14/12/19 今井@慶應 30

15/05/24
16
ロボットとの自然なコミュニケーション
• 設問: あなたはおみやげを持って部屋を出ましたか?(yes / no) また、そうした理由を教えてください。
• おみやげを持って帰らなかった被験者の理由
– 「実験だから」 – 「持って帰っていいのかわからなかったから」
• おみやげを持って帰った被験者の理由 – 「せっかくもらったので」 – 「おみやげだから」
• おみやげを持って帰らなかった被験者は、「実験である」ことを意識していた
14/12/19 今井@慶應 31
ロボットの社会性を考える
• 使用状況 – 遠距離恋愛の遠隔デート – マッチメイキング – 遠隔買い物 – 高齢者支援 • 買い物 • 観光 • 里帰り
14/12/19 今井@慶應 32

15/05/24
17
ロボットの社会性を考える
システム構成
Smart Phone
PC (Skype) WiMAX
Blue tooth
Motor Control
Audio Video Stream
Control Interface
TEROOS
14/12/19 今井@慶應 33
ロボットの社会性を考える
Camera
視界を、装着者と操作者が共有できる
14/12/19 今井@慶應 34
15/05/24
18
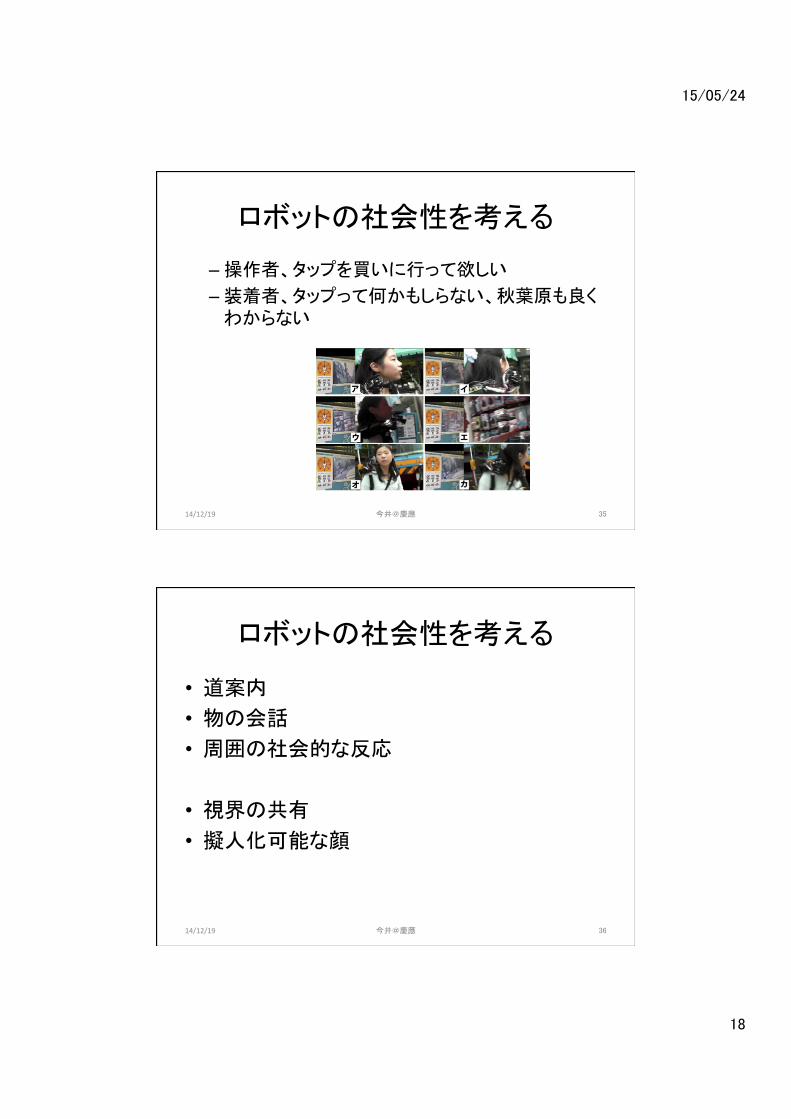
ロボットの社会性を考える
– 操作者、タップを買いに行って欲しい – 装着者、タップって何かもしらない、秋葉原も良く
わからない
14/12/19 今井@慶應 35
ロボットの社会性を考える
• 道案内 • 物の会話 • 周囲の社会的な反応
• 視界の共有 • 擬人化可能な顔
14/12/19 今井@慶應 36

15/05/24
19
ロボットの社会性を考える
Camera
周囲の社会的な反応
視界の共有
道の目印を見つけたり、物に関する 会話をするのに有利
擬人化可能な顔 + 人の肉声
14/12/19 今井@慶應 37
ロボットの社会性を考える
14/12/19 今井@慶應 38

15/05/24
20
ロボットの社会性を考える
14/12/19 今井@慶應 39
ロボットの社会性を考える
14/12/19 今井@慶應 40

15/05/24
21
ロボットの社会性を考える
14/12/19 今井@慶應 41
ロボットの社会性を考える
• タップは見つからなかった – 電波の問題
• 最後に、ニッパーを購入して帰った
14/12/19 今井@慶應 42

15/05/24
22
今井@慶應
ロボットの社会性を考える
13/11/09 43 14/12/19 43
社会性を感じ辛い
社会性を感じる
テレプレゼンスロボット
自律ロボット