3d kinematics eric whitman 1/24/2010. rigid body state: 2d p
Post on 19-Dec-2015
223 views
TRANSCRIPT
3D Kinematics
Eric Whitman1/24/2010

Rigid Body State: 2D
p
x
y
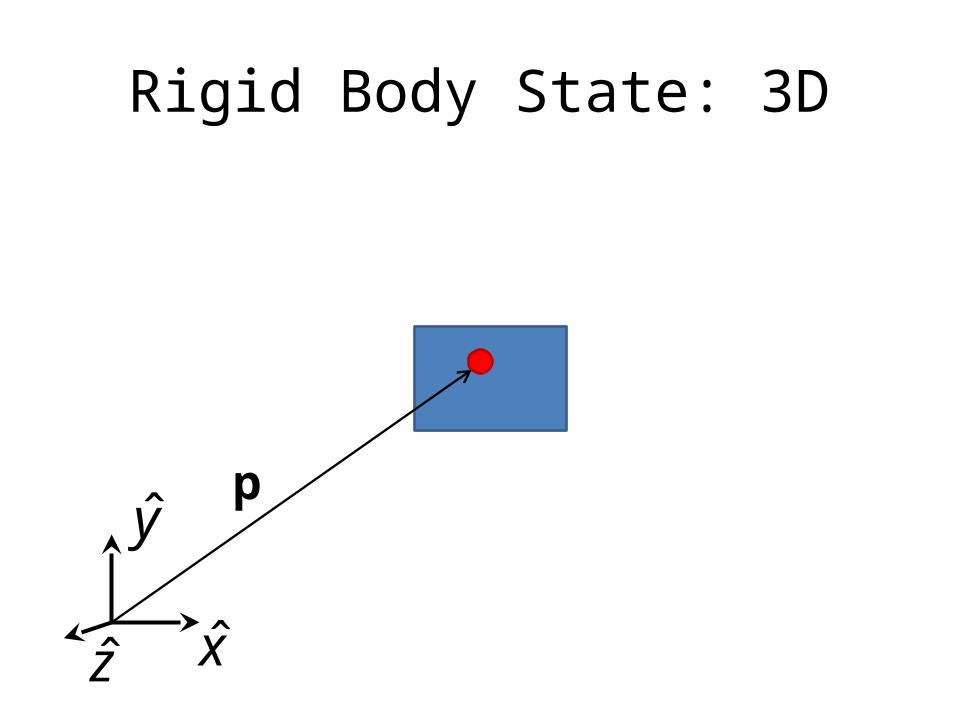
Rigid Body State: 3D
p
x
y
z

Add a Reference Frame
p'x
'y
'z
x
y
z
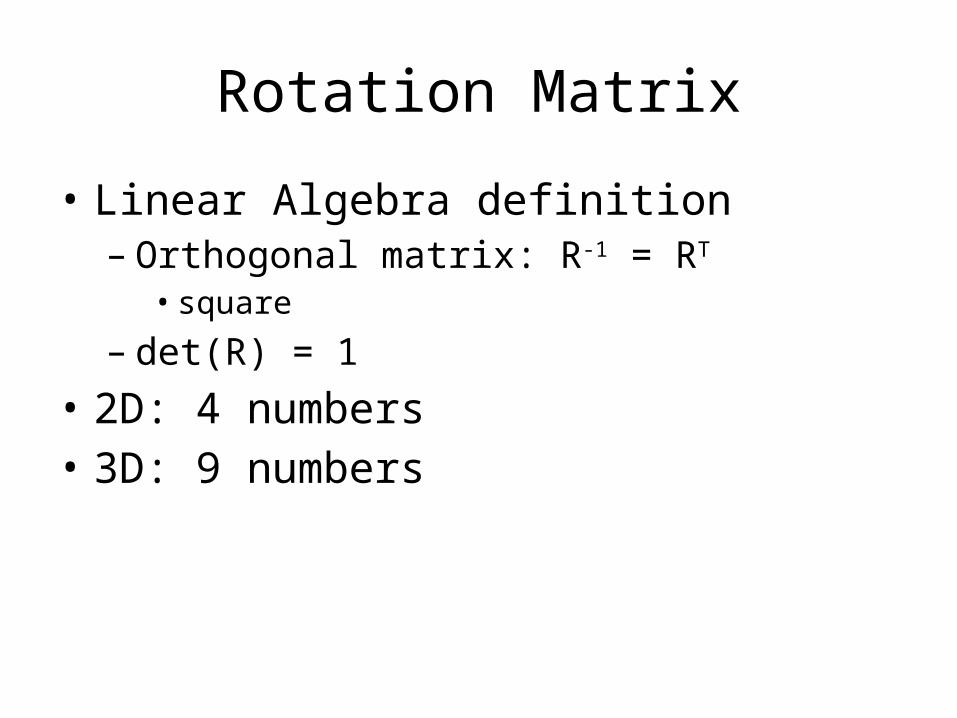
Rotation Matrix
• Linear Algebra definition– Orthogonal matrix: R-1 = RT
• square
– det(R) = 1• 2D: 4 numbers• 3D: 9 numbers
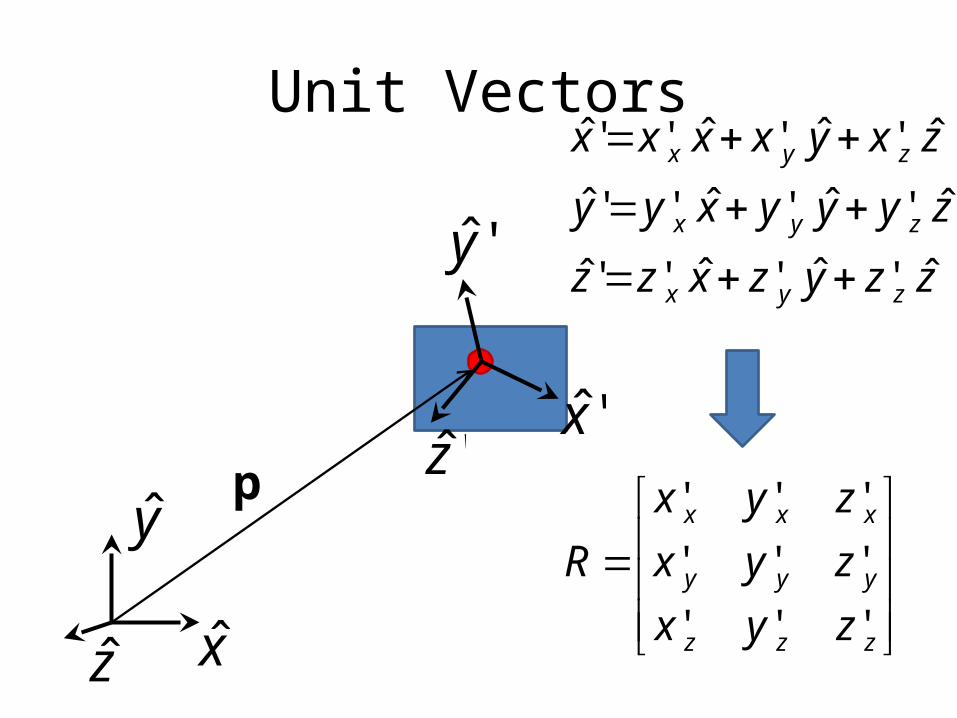
Unit Vectors
p
zzyzxzz
zyyyxyy
zxyxxxx
zyx
zyx
zyx
ˆ'ˆ'ˆ''ˆ
ˆ'ˆ'ˆ''ˆ
ˆ'ˆ'ˆ''ˆ
zzz
yyy
xxx
zyx
zyx
zyx
R
'''
'''
'''
'x
'y
'z
x
y
z
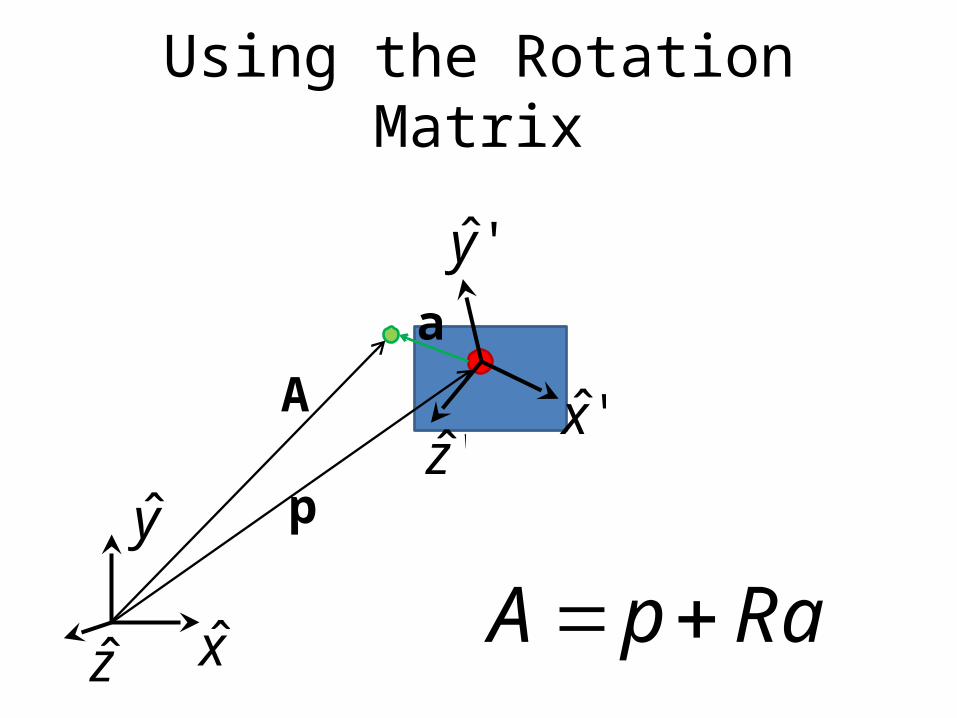
Using the Rotation Matrix
p
'x
'y
'z
x
y
z
Aa
aRpA
Pros and Cons
• Rotates Vectors Directly• Easy composition
• 9 numbers• Difficult to enforce
constraints
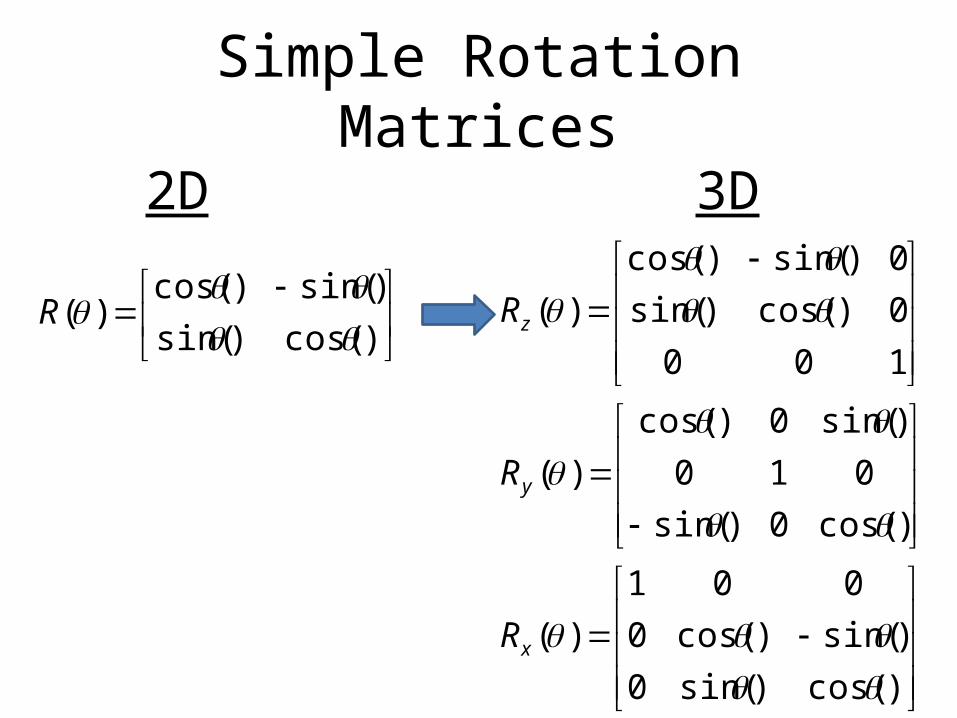
Simple Rotation Matrices
)cos()sin(
)sin()cos()(
R
2D 3D
)cos()sin(0
)sin()cos(0
001
)(
)cos(0)sin(
010
)sin(0)cos(
)(
100
0)cos()sin(
0)sin()cos(
)(
x
y
z
R
R
R
Degrees of Freedom
• 2D– 2x2 matrix has 4
numbers– Only one DoF
• 3D– 3x3 matrix has 9
numbers– 6 constraints– 3 DoF
Euler Angle Combinations
• Can use body or world coordinates• 2 consecutive angles must be different– Can alternate (3-1-3) or be all different (3-1-2)
• 24 possibilities (12 pairs of equivalent)• For aircraft, 3-2-1 body is common– Yaw, pitch, roll
• For spacecraft, 3-1-3 body is common

Construct a Rotation Matrix
ccsss
sccccssscccs
ssccsscscscc
R ),,(
3-1-3 Body Convention – Common for spacecraft

Recover Euler Angles
ccsss
sccccssscccs
ssccsscscscc
R ),,(
)arctan(
)arctan(
)arccos(
23,13
32,31
33
RR
RR
R
Gimbal Lock
• Physically: two gimbal axes line up, making movement in one direction impossible
• Mathematically describes a singularity in Euler angle systems
• For the 3-1-3 body convention, this occurs when angle 2 equals 0 or pi
• For the 3-1-2 body convention, this occurs when angle 2 +/- pi/2
• Switching helps
Pros and Cons
• Minimal Representation• Human readable
• Gimbal Lock• Must convert to RM to
rotate a vector• No easy composition

Axis Angle (4 numbers)
• A special case of Euler’s Rotation Theorem: any combination of rotations can be represented as a single rotation
• 3 numbers to represent the axis of rotation• 1 number to represent the angle of rotation• Has singularity for small rotations
,a
Rotation Vector (3 numbers)
• The axis can be a unit vector (only 2 DoF)• Multiply axis by angle of rotation• Can easily extract axis angle– Axis = rotation vector• Normalize if desired
– Angle = ||rotation vector||• Same singularity – small rotations
a
Pros and Cons
• Minimal Representation• Human readable (sort
of)
• Singularity for small rotations
• Must convert to RM to rotate a vector
• No easy composition
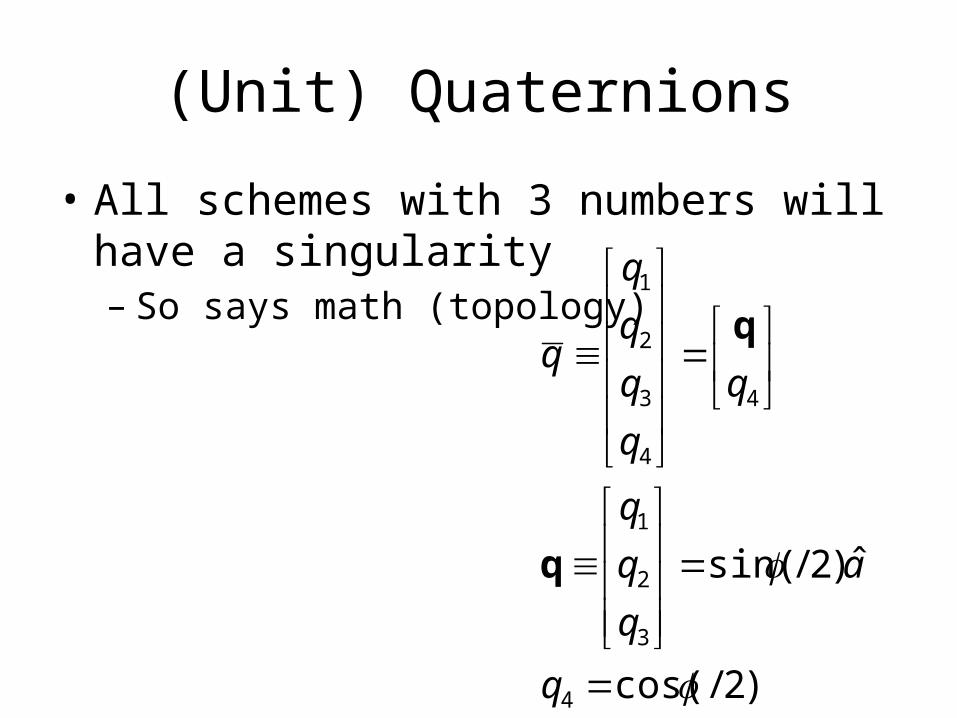
(Unit) Quaternions
• All schemes with 3 numbers will have a singularity– So says math (topology)
)2/cos(
ˆ)2/sin(
4
3
2
1
4
4
3
2
1
q
a
q
q
q
q
q
q
q
q
q
q
q
Constraint
• Easy to enforce
124
23
22
21 qqqqqq T
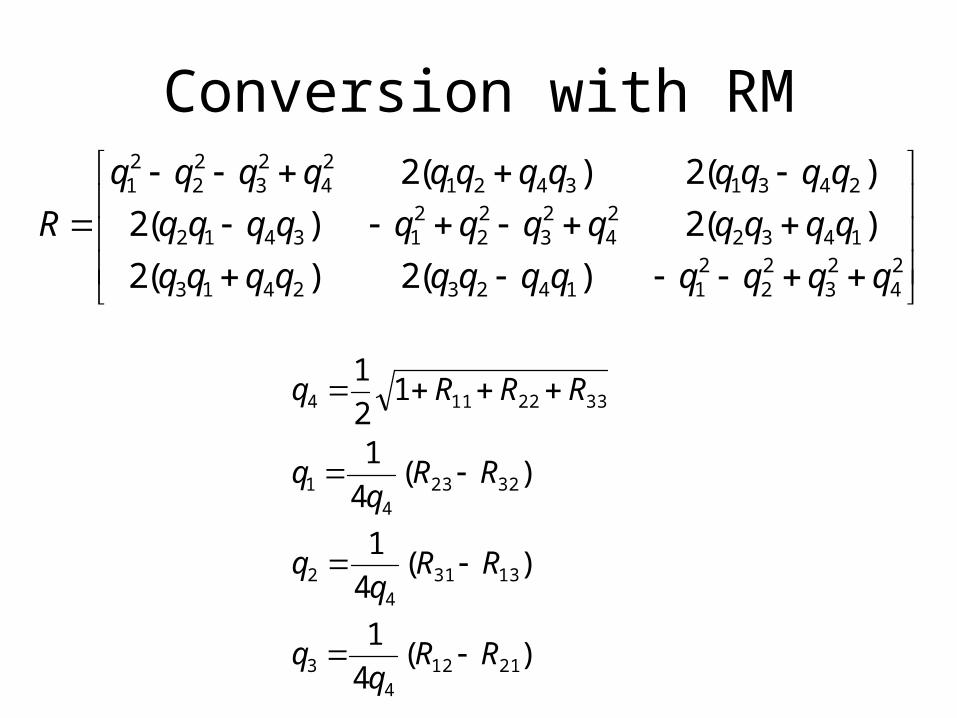
Conversion with RM
24
23
22
2114232413
143224
23
22
213412
2431342124
23
22
21
)(2)(2
)(2)(2
)(2)(2
qqqqqqqqqqqq
qqqqqqqqqqqq
qqqqqqqqqqqq
R
)(4
1
)(4
1
)(4
1
12
1
21124
3
13314
2
32234
1
3322114
RRq
q
RRq
q
RRq
q
RRRq

Composition
qqqq
''
''''
44
44
qqqq
Pros and Cons
• No Singularity• Almost minimal
representation• Easy to enforce
constraint• Easy composition• Interpolation possible
• Not quite minimal• Somewhat confusing
Summary of Rotation Representations
• Need rotation matrix to rotate vectors• Often more convenient to use something else
and convert to rotation matrix• Euler angles good for small angular deviations• Quaternions good for free rotation

Homogeneous Transformations10
101
0 pRop
Define:
1
~ pp
10
01
010
1
T
oRA
Composition
nnn pAAAp 11
201
0 ...~