31' t:t- ur- n.- v.ar/ *1 - موقع الجامعة التكنولوجية على...
TRANSCRIPT
t:T-
OF CONTROL SYSTEMS
6.I INPUT SICNALS
Conhol systems are basically dynamic systems So' studying lhetu, behaviour with tine
;";;-i;t. Indeed, the study of variaiion of output of a control system is important
;r;;;y;tp*tiues it cluding its stabiLity ToYuy*l ttle actual inPut to the. syste:l
;-;;t"u"';r.";*" and, therefoie, some siandard test inPrrt signals are used in the
;d;: #" ait.t*"a "".i't
srgnals in Chapter 2 (Section 2 7) and their LaPlace traff-
fo.u'G. Here, we summarise them in Table 6 t'
31'n . -ur- V.ar/ *1
A'*/Ja. c".,t""I-rl , I t| tu rd' Cr!1t
TIME DOMAIN PERFORMANCE
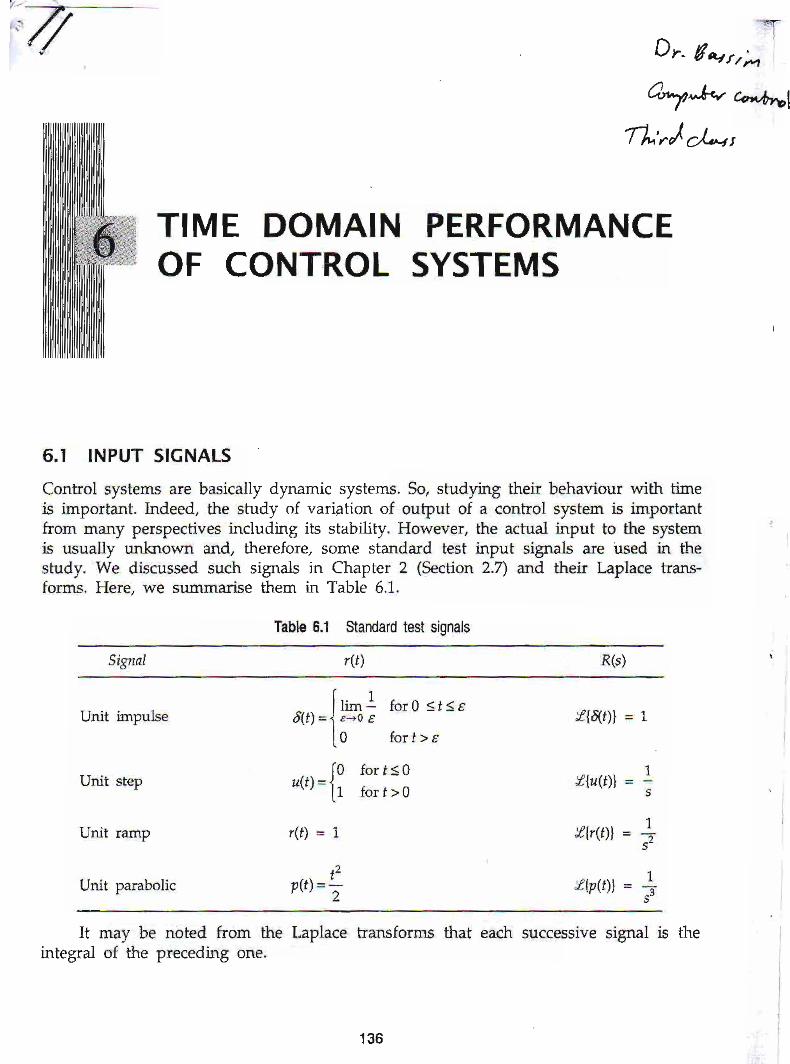
Table 6.1 Standard test signals
R(s)/(t)Signdl
Unit imPulse
Unit step
Unit ramP
Unit patabolic
/(f) = 1
tzP\ t )= i
v{6(f)} = 1
YIU{t)l
{lt(t)l
r,lp(I)l
l r^ l for o <t<et( f )=l€-o€
f0 fo r t>e
[0 fo r fS0a(t) =
{t for r >o
15
1
1s3
Itinte$al
may be noted from the Laplace transforms
of the preceding one.
136
that each successive signal is the

Time Domain Perlormance ol Contrcl Svstems 137
6.2 RESPONSES
Once an input is given to a system, it will produce an output or response. The responsecan be (i) transient or (ii) steady-staie.
The hansient response is that palt of the response which approaches to zero astime tends to infinity. The part of the response that remains after the transients die outis called the steady-state resporue. The parameter, which is important in the steadystate, is the steady-state ellor, ers. It is defined as
ess = lim e(f)
= lim [r(0 - c(t)
where e(t), being the difference between reference input r(l) and output c(f), is the error.
6.3 TIME RESPONSE ANALYSIS: FIRST ORDER SYSTEM
If the dlnamic relation between the reference input /(r) and output.(t) of a system isof the form of
then it car be wdtten as
a1ff+ a6c(t) = bor(t)
rp-+4t1=xr1t1a t
where r = alao = firf.e constant ard K = bo/qo = gain of the system. Taking the Laplacetrarsform of Eq. (6.3) and assuming all initial conditions = Q we have
(6.1)
(6.2)
(63)
(6.4)
(6.s)
(s?+ 1)C(s) = KR(s)
Equation (5.4) yields the transfer firnction as
^. C(s) (( J ( S ) = : = -" R(s) sr+1
The order of the transfer function is 1. So, such systems are called fust order systems.The block diagram and the signal flow graph of a first order system are given inFigure 6.1.
(4.) (b)
Figure 6.1 Firs't oider system: (a) block diagram and (b) signal flow graph.
Now, we check the resporue of the system for diflerent standard inputs.
1sf

138 lntroduction to Linear and Digital Contrcl systems
6.3.1 Unit lmpulse Input
Since for the unit impulse inPut R(s) = 1, we have
1C(s) = ---:--;
s t + l
=-.------'
" * ;
On tai..ing the inverse LaPlace transform, we 8et
cG\ =: e-;
So,
The tine-response curve is
0 t
Figure 6.2 Timsresponse curv€ lor unit impulse input.
6.3.2 Unit Step Input
In the case of the unit step inPut, R(s) = 175. Therefore,
^ . . 1 1L(s)=- . -
S S C + I
11=;---T' t * ;
which on the inverse Laplace transform yields
t
c(t) =7 - e t
1c(t) -+ :
c(t) r 0
6.2.
(6.8)
(6.e)

Time Domain Pertomance of Controlsystems 139
It may be obsewed from Eq. (6.9) that
lnifial sloPe of the cu*e =dc(tll
1 -1 I=-e t I
1r
We see from Eq. (6.10) that if the value of r is high, ihe initial slope is low and vice
versa. Thus, the lower is t the faster is the response' Also, the lower is r, the Ngher
is the stability. This is aPparent from a plot of its poles (see Figure 6 3 where a Plot is
shown for hvo values o]-t with q > tr' Here the transfer function may be obtained
from Eq. (6.8) as
-. . C(s) 1G(s) =
L(,) =;
+ 1
Poles are obtained by solving the charactedstic equation sr+ 1 = 0, yielding s = -l/r'
(6.10)
(5.11)
Flgure 6,3 Plot ol poles of a closedloop lirst order system
The steady-state error is given as
es, = lim k(t) - c(f)l = 1 - 1= 0
This result js obiained from the time-resporue of the s)"stem. without finding out the
time.response, i.e., without doing inverse Laplace transform, we can find out the steady-
state error by applying the finai value theorem. we will discuss the method later (see
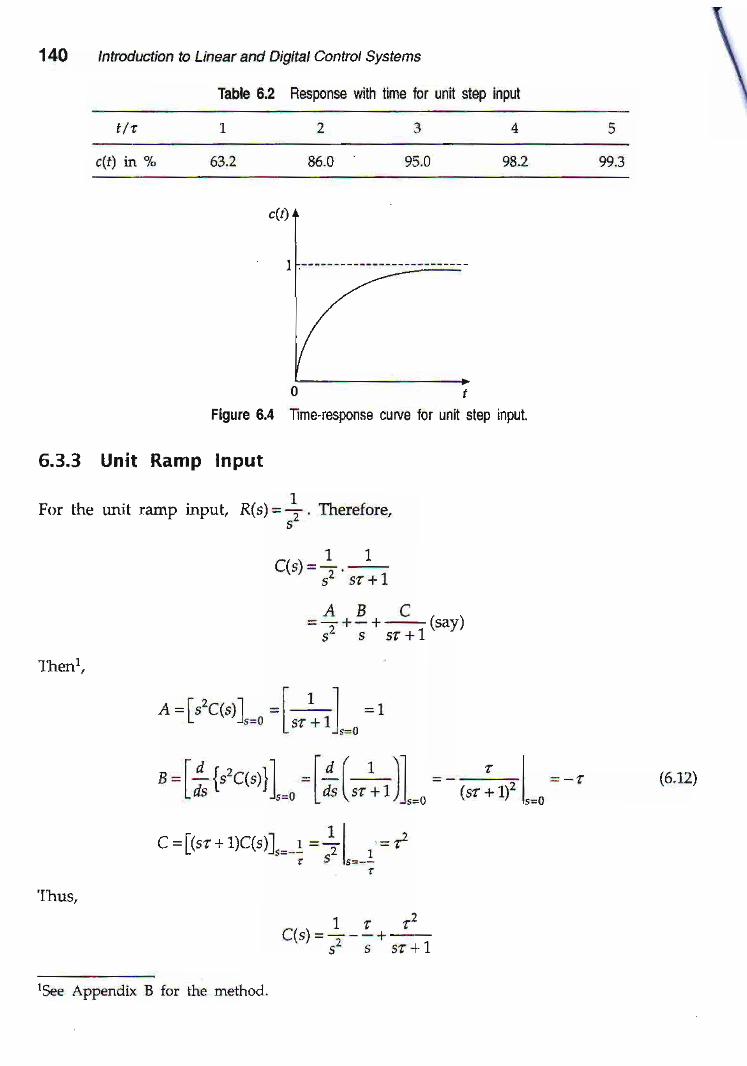
Section 6.5).An interesting result may be obtained from Table 6'2 where the values of the
output are givm igainst t/l. lt may be seen that the step response of the first order
sysiem attaiiu 99.3i" of the final value for t = 5't ' The time-response curve is shown
in Figure 6.4.
140 lntoduction to Linear and Digital Control Systems
Table 6.2 Response with time for unit step input
t / r
c(t) in % 63.2 86.0 95.0 982 99.3
c(t)
I
6.3.3
For the
I nen"
0 tFigule 6.4 Time'response cuffe for unit step input.
unit Ramp Input
1unit ramp input, R(s)=; Therefore,
'I 1
s- sr+r
AB C=;+-+------;.(saf)s ' s 5 t+ I
t1 l= l - t - _L
lsr+11 ^
t,,.,,,]]"_, = [,i (rh)],=, = _ d7l"=,= _ "1
a =is'?ctsll ^
=l+L A S
=[G"
(6.12',)
+ - t l L t s l l I =i l
Thus,
lSee Appendix B for the method.
' l r r z
C(s)=+-'+ :s ' s s t+r

Tine Domain Perlormance of Contol Systems
1t t=- t - -+ - - - -Ts - s s+ j
twhich on the inverse Laplace transforrn yields
-:c ( t ) = t - a 1 7 2 t
r -1)=t-t lL-e " I
\ , /
The timeresponse curve is given in Figure 6.5. The steady-state eEor is given
e* = tim [r(r) - c(f)]- - t t_
= t - (t - z) From Eq. (6.14)1
Table 6.3 Mrnual relationship between inpul and response
141
(6.13)
(6.14)
(6.1s)
Flgure 6,5 Time"r€sponse curve for the unit ramp input.
We find ftom Table 6.3 that the interrelation between different inputs also holds goodfor the corresponding responses.
Input, r(t) Response, c(t)Reldtionship Relationship
Rampr(t) = t
u(t) = 1
Impulse
d(4
dr(t\dt 7- e' t / t *orl,,*
1- !t*,^,,1,=" *n l"-,

ila Eitoduction to Linear and Digital Control Systems
6,4 TIME-RESPONSE ANALYSIS: SECOND ORDER SYSTEM
Ii tl€ d]'namic input-outPut relationshiP of a system is rePresented by a differential
equation of the form oI
o^ d"\') * 0.4!ll 1 ao6(1) = !or(1)
'd {a t(6.16)
(6.77)
(6.18)
i i isca l ledasecondordersystembecausewewi l lpresent lyseethat thet rar rs fer func-tion of the system has an order of 2'
Eouation (6.16) can be written as
1 dzclt) *2€ dclt) +c(f)=Kr(f)c'* dt2 a" dt
'1_ - az
, 2q =a, , ^d K =b
oi ao 0n as 40
"*iil$|,iJl'ii'f*x\i#il#?"{#l#il";,'W'ff ,7,"^#u^JJ1*'#ii'*i'ro["'^iii-J-tt+"- ii."., utt
-ittltl"t conditions = 0)' we get
l++:! :+1lc(s)=KRG)\ ar; an )
where
On rearranging Eq. (61E), we get the transfer function for the secsrd order system as
car=ffi=;l-fi4' ,, -'
, , , -z=7.rlz.s;A
This can also be written in the form
cG)- KR(s) s(s? +1) + K
. {
= -.-.-L..-;
rS r \s_ +-+-
K"_ =ai7
where
(6.1e)

Time Domain Peiomance ot Control Systems 143
and (6.20)
2at
The results given in Eq. (6.20) are inportant because they indicate how the undampednatural frequency and damping ratio behave with the gain, With the increase in gain,the natural frequency increases which, in turn, reduces the damping ratio.
The block diagram and signal flow graph representations of a second order systemare given in Figure 6.6.
(a) (b)
Figure 6.6 Second order syslem: (a) block diagram and {b) signal flow graplr.
From Eq. (6.20) we see that the characteristic equation for the system is
sz +2fatns + afi =o
Therefore, its roots are given by
(6.21)
sr, s, = -(o, ! a" ,t€'z1 (6.22)
Depending on the value of (, three distinct cases present themselves from Eq. (6.22)as shown in Table 6.4.
Table 6.4 Three distinct cases of second order svsiems
txYT
124@- =:
t
€ =
Danping ntioxalue
Roots of charactetisticeq .Ltion
S!stefllspecifcatian
123
E> 1
E<I
r t r 12 dLu
q = s2 and both are real.s1 and s2 are complex, one beingthe coniugate of the other.
Overdamped
Critically damped
Underdamped
We will consider only the r.nit step input for the second order system.
14 lntrodlrdion to LineAr. aN Digitat Contrct S}fl{ems
6.4.1 Underdamped (O < 6 < t)Here we have
Thery
c(')=T;#;a R(,)
-4, B cs 1s+(a,- jr,, l t-Crl k+(a4 + 1a,,t l-y'1
e=sc(s)1.=. = =,1 |' - (s + €a, - ja,1l1 _ ()(s + fa, + iat,,tt_ 6r)1,=o
="t€'d * r,*Q- €')
- F2 v r ;
(6.%)
(6.24)
t1 * z€r,t * ,4, 'i
s(s + (a, - jro,,t1. - (2 11s + (a, + ia^ .fi - 62 1
et-i l l-€'z)F€+
(6.:2s)
Time Domain Petformance of Contrcl Systems 145
^ : h E 2 )z J ! \ _e
Substituting dre values of 4, B ard C in Eq.
' t ( , ' ' )
!151=: - l - - - !+ : l
" l2i,l1-e 2)
(6.23) we get
1
s+(a,- jo4^l l j
1
(6.26)
(6.27)( E 1l-l;@-21
s + (a, + ia, rll-1,The inverse Laplace trarsfom of Eq. (6.27) yields
( - . \ ( " - \
( r )=I- |_9 + ! l r - tq- i ' l t -E ' t ' . ' * I -L-1|"<1uiJt-€ ' t ' " rlzj^lt-€' 2) lzj, lt-€, 2)
. € l r-,e -i,F:F,^' - r<e-i[4-w,,f l r-,t-i,!14w, *r-c.i,FZw,,l='-El ,i j-L ' l=t _ ia2r=l,ti[4,.t _,-,i'FT,,' )_,-r*,1,,i[7,^' *_"-u,FT,^'1
^lt-E,L 2j j L 2 )E--1a"1=t-ffi" r,tSI -r+^,'
"orr"t,[-y'I eie - p-ie - eF +e-F l
L 4 =t 'oaro -=cosal
= | - e-c@rl L,^ r,, - "or,,,lj lt-e "l
wherc, os4 =r,,{11 . m"sf
"(t)=t-ffi"a(aat+O)wherecosf={ .
(6.28)
to Linear and Digital Control S'rsterns
"<t) 2
I
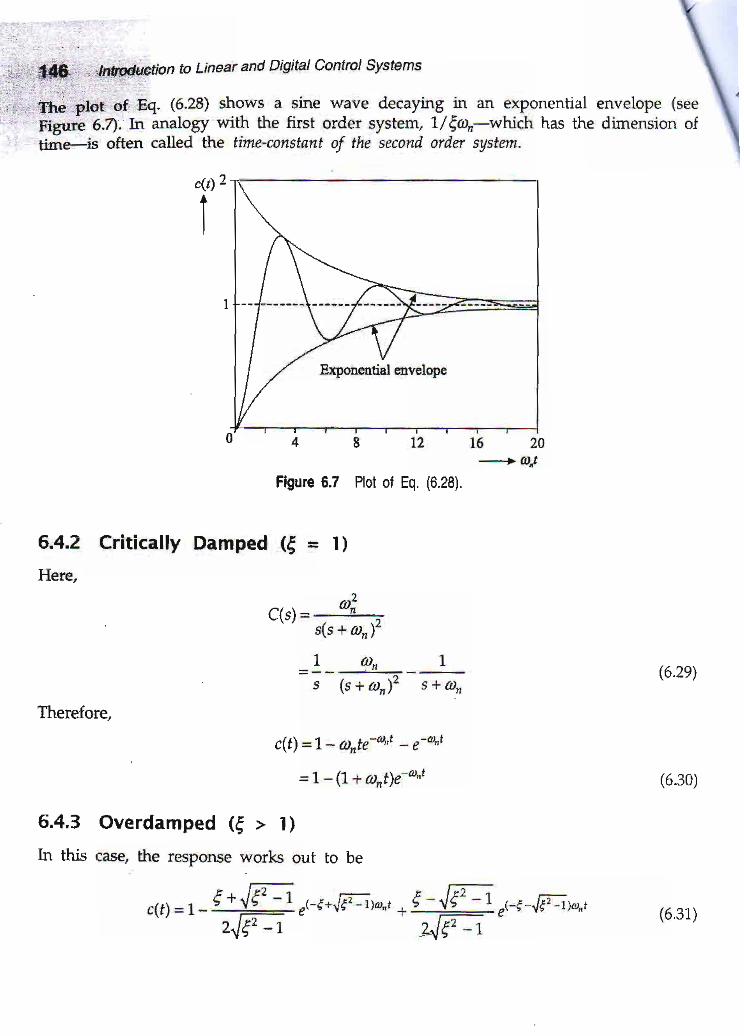
Figue 6.? ptot of Eq. (0.2a). a
6.4.2 Critically Damped (6 = r )Here,
ffi&. (6.28) shows a -sine wave decaying.,in an exponential envelope (seeif-, h arylogy udth the fi$t order systerL 1/6a+_which has the dimension ofi often called tJne thrle-mnstsnt of the'seconi orier"system-
- -* -
aiL(sl = ----ij-
s(s + aL)''L a"s (s + ro)2 s+an
Therefore,
c(t) =7 - o#e-aa,t - e-qt
=7-(7+a,t)e-,t
(6.2e)
(5.30)
6,4.3 Overdamped (6 > I )In th.is case, the response work out to be
,1,1 =, - Lfr ,t-€-'!Fiw,r * L-JVi- ",-, -E u,,,,,2,,1€, -1 zJP= "
Exponcntial covElopc
(6.30

lime Domain Peiormance ot Control Systems 147
The response curves for cdtically damPed and over-damPed systems are given m
Fgure 6.8.
o 2 4 6 ,__________ J"
Figule 6,8 Response curves for critically damped and overdamped sysiems.
It is apparent from the curves that the more is the value of t the more is the rise time
and, tirerefore, ihe settling time. Also, it can be seen from the cuwe that a criiica1y-
darnped second order system attains the step inPut value at the time constant value of
nearly 8 while this value was nearly 5 for the first order system'
6.4.4 Performance Parameters for Transient Response
The relevant Parametels are defined in Table 6.5.
Table 65 Perlomance Parameters
c(t)
1''
,/ - Cdticany drnPed (E = 1.0)
,,' ----- overdrnp€dc= l.t
Pararnetet Defnition
Delay time, t4
Rise time, J'
Peak time, tp
Maximum overshoot, Mp
Settling time, t'
The time required fo! the steP response of the system to reach50% of the final value.
The time required for the steP resPonse to reach the final outPutfor the ftst time in underdamPed systems or Srow from 10% to90% of the value in overdamped systems
The time required by the steP resPonse of the system to reach thefirst peak which is the maximum value of the output.
The maximum amount by which the outPut deviates from theinput. It is generally expressed as Per cent of the inPut.
The time the s,'stem takes to settle within a giv€n Per cent of the
final value.
These parameters are graphically Presented in FiSure 6'9 for the steP resPonse of a
second order sYstem.

148 lntod^ction to Lineat and Digital Contrcl Systems
c(t) t et '"I
t.2
0.8
Figure 6,9 Graphical pr€sentation of performance param;o|
Nov/, let us discuss these parameters one by one.Delay time
Ior (> '1
x=7+0.7EEquation (6.33) yields ihe approximate expression for d as
. 1+ o.zeorn
t
0.4
0.0
According to the definitiory ,(t)1,=,, =;. So, from Eqs. (6.28), (6.30) and (6.31) we get
( t+x)e- '= |
5 r-{!-:! "r-e',"t}-r " *1-,1(
-1 "r-:-,ng-rr
=12'l( -t z,lg, -t -
2wnere : = arola. Solutions to Eo. (6.32) carr be obtained for diJferent values of f arrdpol,lni.'[,,ffii graph of { u'
". A ti.,"", "pp.;,";;;"-i; iJ, g,"pll ts siven uy the
Rise timeWe consider the underdamped system for simplicity. If t, = 1i,o" requued to attain thesteady_-state value, we noti that ihe sine facto^r .f iiq. 1O.Zey'rf,orid harr" a ,ero ualoeto make c(r) = 1. Thus, from Eq. (6.28), we get
(6.32)
(6.33)
(6.34)
i-1,\Y,
- - - - - - - - - - - - - - - - - t , - - - - - - - - - - - - - - _ _ _ _ - _ ;
str.(adt + lt_t, =0=sinNz (6.3s)
Time Domain Pertotmance of hntrol Systems
first time, i.e., for N = 1, we have from Eq. (6.34)
|'..._-. , ' h r 'tDnt t l t -5 - +cos 'E=E
. n - cos-l E (6.36)
ad cos (0d, + il - E@^ sin (odtp + 0) = 0
|---Jt - f'z cos 11ar".it - oz \tp + 01- € s:u;.l(a, 11'-,,')te+Ql=0
i--------=
sin / cos [(a,, ,lt- ro'1to +/]-cosCsin(ar, 17-a')tp+0)=0
snl@,,[-FYr+/-/ ]=o=sinNz 6s7)
For the first peak, N = 1' Therefore,
L=-.L' , ,Jt- i '(5.38)
(5.3e)
a little algebraic
(6.40)
149
Peak time
ff t" = time required to reach the first pea! we can find an expression for it from
rq.is.za1 using -tfte
condition that c(f) will be maximum here' Thus,
-to"t" ,n, o-1r,t"dc\t) | =-lJt" cos (r,t"t, + 61n2!! sin (rd,rt, +d)=0dt 1,, Jt-g' ,!r-f
Maximum overshootSince it is the overshoot value at the Peak tirne,
Mr=c(t )1,_ro_.1
--1o"i l
fusrnfta,./t -(ltr+P1
Substituting lo value from Eq. (6'38) h Eq (6'39), we get after
rnanipulation
-i-Mo = s r'- '
Maximun per cent overchoot can be obtained by rnultiplyin-g the righFhand side ofgq. fO.+Ol Uy 100. Ii may be observed that Mo is a function of { only' Its behaviour with
f is shown in Figue 6.10'
^ t ; ,2

150 tntroduction to Linear and Digital Contrcl Systems
'/oMe IOO
tl,oI
60
Settling timeIf ts = time for settling within 2% of the final value, then
5@"
This approximate relation can be arrived at from the following considerations. Supposewe want that the output settles u/ithin a tolerance band of tA. That means, the arnpli-tude of the oscillating sine factor shoutd equal A Therefore,
t -=A
Vl - 9-Taking the logarithm of both sides of Eq. (6.42) and on rearranging, we ger
0
Flgure 6.10 6 vs Mp ptot.
-€atS"=rr6.,trj1
=]nA-: -2
. t InAt - = + - -' 2an €o"
Since f < 1, the second term on the right-hand side of Eq. (6.43) doninates and so wemay write it as
t =-++ $.44)Eo"Substituting A = 0.02 in Eq. (6.M), we get the approximate reiation of Eat. 6.aU.
(6.4-L)
(6.42)
(6.43)

Tme Domain Perlormance ol conttol systems 151
SteadY'state error
From the definition of error--|'i"l
e( = r\r\ - c0 = kV
s\^(ali + Q)
eo=e(r)L--=0
j'1#",':$tr1';{.'##j{liill':'#iffil'For a unity feedback system having
LcG)=a;l6i
find (a) o+' (b) € (c) ara (d) ro and (e) Mo'
Solution: Since it is a unity f""aUutt 'yu"'n' its overall transfer function is grven
by rG)=#%
With this
lems and then
to calculation
EXAi/IPLE 6.t
25s(s+10)+25
25s2 +10s+25
a]"=---------
sz + Z(tons + a4
the given transfer function with
(criticallY damPed)
(6.4s)
(6'46)
out a few Prob-having recourse
that of the stan-
ComParing the denomirators of
da-rd second order system' we ger
(a)
(b)
(c)
ai =zc
an = 5 tad/s
z(a, = L0
,=5 ' - l
l - c z _ i( D d = . / J n l L - 9 - w

cG)=:- +:s(r+s l ,
where T and K are Positive constants. By what factor should the gain K be
that(a) the peak overshoot of the system to unit steP input is reduced
25o/", auld(b) the damping ratio increases from 0.1 to 0 5?
Solution: The overall hansfer function of the system is given by
152 lntroduction to Linear and Digital Control Systems
b=--#'+*(noveak)
Mp = 0, since it has no Peak.
The open-loop transfer function of a unity feedback system is glven by
reduced sudr
from 75olo to
rr"r = G(s)- ' - '
1+G(s)
Ks(1+sT)+K
K/T=" s n- 'T 'T
(r)- s2 + 2(ans + c']
(d)
(e)
EXAIiIPLE 6.2
By comparison we get
(a) From Eq. (6.40) we
On taking the logarithms of
(ii)
(iir)
-G
1o;"=.tK/T *rd €=ft.
--+-^^ .tr- ti
\Mp)1= Lwe ' " = / J
,t'--/rr \ - inn- ,! t- i i -oE,\tvlp 12 - Lw.
both sides, vre get
-ffi=nffi=rn3-rn4
ln4- ln3 ^^^ . ,= - = U'u, loOI(i")

(-^
Time Domain Peiormance ot Contrcl Systems
l n 4 - l n 1= ::j_:___:- = 0.4413
1S|
(v,-ffi
(vi)or
("ii)
(viii)
reduced to lower the Peak
(ix)
/(t) = sin t
RG)=-5fs -+1
Equathg the numeratols of both sides, we get from comPadng the coe{ficientss6, *, sa, s3, s2, s and the constant
Substituting E =# ^^ €r=#, we get from Eqs. (iv) and (v)
r ^ ̂ ^..: = U , V Y I o
J4KJ -1,
K1T = 30.045"t ^ , , . .
-=u. '+4t lJ,l4K2T -1,
or K2T = 7.534
Thus from Eqs. (vi) and (vii), we get
K. 30.045 -^ _^-- = - = I y . 5 d oK2 "1.5U
Equation (viii) suggests that K should be nearly 20 timbsovershoot ftom 75'/" to 25"/".
(b) Here,
€,=w_€z \ KtT
(, e] (o.ef ̂ -.j =: = ---------- = JoK2 €i (0.7)'
The import of Eq. (ix) is that K has to decrease to 1/36 ot its Present value to increase
the damping ratio lrom 0.1 to 0.6
EXAMPLE 6.3 Find ihe time response of the following system for inPut r(t) = sin t'
"(s) = ---1-' ' (s+ l ) (s '+1)
Solution:

154 lntoduction to Linear and Digital Antol Systems
1111 ' ]A=l,B=-: 'c=:. D= : and r=;
42244
Thus,I 1 1 s - l 1 ' - l
L(J) -a. s+ I
- t . ( r r_ i ) t - 4 ?;
1 1 1 s I 1 1 s .1 1T- . - : - - - - - - - - - i - _ - : . - ; - - - - ' -- I ' s+ t -Z
[ t+ f12 '2 G2 +1)2 4 s2+1 4 s?+1
On performing inverse LaPlace transfoLm,
. . 1 ' 1C 1 1 1c(t)=:ct- rVUsnn*;t
s inf - icmf -Nsint
=1r-t -1r* r - l tcost +1 tsin t - lcos t +]sint4 ' 2 - 2 2 4 4
. t 1 ( . n \ 1 ( . t r \=ae-t - -#sinl r +T l++rsinl t - ; I4 2 ,12 \ 4 .J 42 \ 4 /
EXAITPLE 6.4 A step inPut is applied to a unity feedback sl"stem having the following
openloop transfer function:
u(s)=s(s+3)
Find (a) the closed-loop Fansfer functiort (b) at, (c) { and (d) (d,i.
Solution:
(a) Closed-loop transfer tunction =i%==+* = ̂ z tS
1+C(s) s (s+3)+15 < '+35-15
(b) Comparing the denominator of the closed-loop transfer ftnction with that of astandard second order transfer fun€tiory we get
1ti =1'5
or a, -- JE =3 873 rad/s
(c) From the same compadson, we also get
z(tt' = 3
t= 3 =-L=o.sez' 2a,, 2.1"15
(d) ,n=r, , [ - { = 3.57rrad/ s

fII
a{At PLE 6.5 A second order confrol
;biected to a steP inPut Determine (a)
(b)
(c,
(d)
Time Domain Performance ol Contolsystems 155
system, having 6 = 04 and au = 5 rad/s, isilosedJoop transfer function, (b) t., (c) tp, (d) L
and (e) Mr'
Solulion:(a) The siandard closed-loop transfer function for a second order control system i5
given bY
c(s) alRC\=j.'zA"*4
Substituting the values of g and a)", we gei
C(s) 25R(s) s' + 4s + 25
t t - cos- ' t n-cos- l 0 .4 ^ ,. = :=- - . ' *33s' , ,$-4 5Ji-016
, =---L=---L-=166,' ' t ,Jt-* sJ1-0'16
44t"= fu,= (u4)(r= '"
(e)
EXAMPLE 6,6function:
%M, = 1se "' (- ft)=', ",.' [- ffi] = *,
14c+t s+; A B
t r > ; = - - - _ - - i . ; = : ' = - , . - I' ' (2s +7\ ' f 1 \ ' f 1 \l '-;J t'*tJ '-t
A unity feedback control system has the following oPen-looP transfer
^ . 4s+ lU tS )= -
4s'
Find expressions for its time response when it is subiected to (a) unit imPulse inPui and
(b) unit steP rnPut.
Solulion: The closed-loop transfer function of the system is given by
- C(s) 4s+1 4s+7- ' - '
R(s) 4sr + 45 + I (2s ' i ) '
(a) For a unit impulse inPut, R(s) = 1.

Thus,
co=- /+l'++ul'*;) '*,The inverse Laplace trarsform of the above equation yields
,6="4 _!pi=1,_i]r:
(b) For a unit step input, R(s)=]. f:herefore
7
cG\= ( +=+*, j;g*{ t,"yr
'l'n tJ ['.;J '*,
,*1 I.,{=sc(s)1,_o=a+l =l['*rJ l"=,
1'56 tntoduclion to Linear and Digital Contol Systems
Thert
)'.u,t=+ =(,.i),= ,.r)'.,0]"__, =*(,.
2
1+-2
tl'- -
\ -
)
ds
1 l/ i \ 2 | s+ : l
^ I r l - . . 1 a l 1 ,D= ls+; lc (s ) l = - - -a l\ zJ I I s I 2
- l s = - :2
1 \ l/ L | 1
z
.=f,{(,'};'.r,,}L_,=*{+}l =i: +---, t Jl.=_r L
12
Thus,

lE inverse LaPlace transform yields
Figure 6'11 Block diagram of the control
Solution: The block diagram can be reduced
Time Domain Peiormance ol control systems 157
system (Example 6.7).
as shown in Figure 6.11(a).
. | | | r r Ic t1= j +!k1 -e-z =t - l t - : ls z. 2 \ z /
E(AtilPLE 6.7 Determine the trarsfer function of the control system given in flguJe Ort]
ffi"i"-ri* ur.""pression for its output if the input is a step having a magnitude of 2
units,
Flgure 6.11(a)
The reduced block diagram yields the closed-loop ftansfer function of the ryrstem as
C(s) 4T/<\ =: l :1= :' ' " '
RG) s(s+4)+4+4(s+2)
4=7;8s+12
4
(s+2)(s+6)
r(s 'f 4) + 4
158 ln oduction to Linear and Digitat Control Systems
JGiven, R(s) =: . Therefore,
s
cG)=so;is+6)
=A* B=*-!_1r"y15 S+ l 5+6
Then,
A=sC(s)l =81=?' ' 's=u (s + 2Xs + 6) l._o 3
B=(s+2)c(s)1"__, =Girl"= , =_,
C=(s+6)C(s) l =81=:' ' ' s=-o s(s+2) l 3
Thus,
cG)=:.1_++1.+J s s+z J s+6
Its inverse Laplace traasform yields
c1t\ =2, - e-^ a !2alC J
EXAMPLE 6.8 Measurement conducted on a servomechanism shows the error responseto be
e(t) = 1.66e-8t sin (6f + 32")where the input is a sudden unit displacement, Determine the natural frequency, damp_ing ratio and damped angular frequerLcy of the system.
Solution: Given, r(f) = 1. 11"r"1ot"
e( f )=r (s ) -c ( t )=1-c0)
Since the error is sinusoidal, it is a second order underdamped system where for a stepiltput
"-go"tc(t)=1--:......".-s (adt + cos-1 €)
Therefore,
ao=#"*t'rr+cos-1 4)

Time Donain Pertormance ol Contrd Systems
= L.56eit sin (51 + 37.) (given)
By comparisorL
cos-l 6 = 37"
€ = cos 37" = 0.7986
aa = 6 rad/s
A_ = ---:= = Y.YOY raa/s"ha
EXAfITPLE 6.9 In the block diagram shown in Figrue 6.12, G(s) = A/g and H(s) = 25 a 2'For A = 1O determine the values ol m and n for a step inPut with a time{onstant 01 swhich gives a peak overshoot of 30%
159
Solution: The
Figure 6.12 Block diagram (Example 6.9).
overall transfer furction of the system is given by
rG)=:9= G(s)''
R(s) 1+G(s)H(s)
A= s '+A- t+A"
ntZ= _________::t!--
sz+\ las,s+tf i
Comparing the denominators, we get
2ean=An=10m
afi = 4n =19,
From Eq. (i) we find
(i)
. 10m 10m' 20n 2.t10n
Time constant . - ==: -=:=0.1s (g iven)60,, )Um 5f i
Now,
(ii)

t60 lntoduction to Linear and Digital Contol Systems
\m=2
Substituting tllis value in Eq. (ii), we get
, 10 x2 l05=iFo"=ffiAg"lru
(iii)
( -, '\
reak overshoot, "/olv\ = r00 exp l_ ff iJ
= ro <sivenl
-$=*e.31=-1-2sav t - 9
1tz€2 = (7.204)2 (1 _ €2)
e=IE=ouu,nThus, substituting the value of f in Eq. (iii), we get
/rn,l- = 0.3579ln
,=ffi=ze.ozEXAITPLE 6.10 A sysrem and irsDetermine tre values ot ,r,r, a u.J?o*e
curve ;ue given in Figue 6'13(a) and (b)'
(ar G)Flgure 6.13 Example 6,10: (a) th6 system and (b) the responso.

II
I Tine Domain Petformance af Control Systems 161
Solution: The differmtial equation for the system can be wdtten as
Mdzxl t , ) r Bdx( t ) +Kr( f )=y(r )df dt
Its l-aplace transform, for all initial conditions = 0' is
(szM + sB + r0 XG) = Y(s)
Therefore, the transfer function of the system is
r(,)=#=7r*+K1/M=j;T;E,
This yields the characteristic equahon
.r*9r*I=o=r2 +z(at,s + t f i.M-M
By comParison we gef
Now, peak overshoot
zio"=fr
BBF = --,-:-- =:' 2a"M z.JY'M
(i)
(ii)
*, = .*l- #,)=
o $! 1r'o-'""ponse cuwe)
ft=-.o'oeu=zzzos(in)
From Figure 613(a) and Eq (i)
xG) =s(Msz+Bs+K)
8.9
8.9 8'9r(-) =0.03 =1im sx(s) = Igt
Mst;s + K =?-
So,

Conlrol Systems
x=ffi=2e6.67p7*
1 = --ft = z{ from resPonse)o,
"11- 5 '
(v)
(vi)
B2.IKM
= 2(0.se7 \ J Qe 6.67 \n s$)
Figure 6,14 Closed.loop system (Example 6.11).
The overall trarufer function of the svsrem rs
_. . C(s) K. l t 5 t = - = -'
R(s) s(s+a)+K
= 1.958 radls
Combining the results of Eqs. (iv) and (v), we get
',=ffi=''*'v 1041,,
rvt =---. =.-- = / /,365 Ke,)z /1 Oq9\z
And Eq. (ii) together with Eq. (vi) yields
€ =
B =2€JKNl
= 180.91 N-s/m
EXAIIPLE 6.|1 In the closed-loop system shown in Figurc 6.14, determine the value ofK and a such that the per cent peak overshoot due to the unit step input does notexceed 10%. Settling time should be equal to 1s.
Solution:

/
Time Donain Peiormance of Control Systems
K
s2+ns+K
Comparing the chamcteristic equation, s2 + 4s + ( = 0, with that of a standard second
order system, we get
a)" = Vrr
.aa' 2ah zJK
fs =-= ls(8rven)
€ro, = +g .
= - lusrng !,q. (r,l
a=8
16il
Now,
(i)
(ii)
(in)
Ttre peak overshoot condition gives us
( - , \exP!- ; ! 1= g '1
| .'/1 -6' j
=2.303
Substituting the value of { from Eq. (i) in Eq. (iii), we get
nE-7-
Putting the value
^ 1 ,-+=2.303l" n'
\ l ' - 4K
t--------"'= -'---
t!4K - a'
of a from Eq. (ii) h tl:ris equatiorL we get
n(8\- = Z . J U J
,l4K - 64
64tt2
2.303'
. . 11 6Li ... lK = - | -"""""= + b+ | = +) / / 1
4 L2.303- I
OI
ol

164 lntroduction to Linear and DigitatControl Sysl€ms
EXAiIPLE 6.12 Detemdne the value of controller gains Iq and K, for the system shownin Figure 6.15 so that its damping ratio and natural fre'quency of oscillation become 1and, 4 t1z resDectivelv.
Solutlon: Here,
^. . 2(K, + K,s)b ( 5 ) = +
s(s + 4)
G(s)" 1+ G(s)
2K1 + 2Kps
and
2(at, =2Y, a 4
2{at, - 4
= €t+-Z=8t t -2
= 23.13
Figure 6.'15 Control system (Example 6.12).
s(s + 4) +2K1+2Kps
zKt + 2Kps
s" + (zKp + 4)s +zKl
Comparing the characte stic equation, s2 + QK, + ls + 2Kt = 0, with that of a standardsecond order system, we get
We are given vn = 4. 5o,
o; = zK1
an = 21wn =818
nr2
'2
= 64r'2
= 315.83
or

Time Domain Peiormance ot Control Systems 165
6.5 ANALYSIS OF STEADY-STATE ERROR
We have already delhed steady-state error in Eq' (6 1) and calculated the same for fiIst
and second ordel systems in time-domain by a method tlut involves the inverse Laplace
;;;t- of respooses. But this error can be calculated directly from the Laplace
t "n"fo"rnea
values of the response. We will discuss the Procedure in the following
Daragrapfu.' -fro* Eq. (6.1) we know that
e" = lirn 4t)
Applyrng tlre final value theorem2 to Eq' 6'47, we get
e,s (f) = lim sEG)
Consider a caronical feedback s)'stem given in Figure 6'15'
Figure
The overall transfer function
From Figure 6.76, we get
This yields
6.16 Canonical feedback control system.
Ior this system is given bY
-. . c(t G(s)' (t) =
RG) =
J* c(dH(r)
EG)=RG)-BG)= R(s) - c(s)H(s)= RG) - E(s)G(s)H(s)
R(s)"('r=i;d;E6e.. = lirn sE(s)
.. sR(s)=:S1+cG)HG)
(6.4n
(6.48)
(6.49)
(6.50)
(6.51)
2See Appendix A
(6.52)
166 lntroduction to Linear and Digital Control Systems
From Eq. (6.52) we find that while the numerator is related io the input, the denomi-nator, which is the characteristic pol1.nomial, relates to the ry?e of the system. Thus thesteady-state error of a system depends on the following:
. Input to the systemo Type of the systemNext we define what are called static errcr coeffcients ot mnstsnt,
6.5,1 Static Error Constants
Often called y'gares of me t oI a control system, static error constarts are tfuee in nurn-ber, namely:
1. Static position error constant, Kp2. Static velocity error constant, Ka3. Static acceleration error constant, (0
They are defined in such a way that the higher is the value of the constant, thelAcc ic rho ' , .1 , , - ^ (
"One may note here that each enor constant variable is the dedvative of its
precedhg one, i-e., velocity is the derivative of position and acceleration is thederivative of velocity. These originate from their definitions.
6.5.2 Input Types and Error ConstantsStep inputHere,
R(') = 15
. t s 1l.. c-=Slr_qu*o 1
.. 1
"-,0 1+ G(s)H(s)
L+li4G(rHG)
11+K"
where
Kp =lt4GG)HG)
is called the static position error constanl.
(6.53)
(6.54)

l//'
RamP inPut
tlete,
Tme Domain Peiotmance ol Conttotsystems 167
1RG)=-
I s 1l""=SL*cG)At 7l
1- li'n-
ijd st1 + GG) H(s)l
1-limsG(s)H(s)
s+0
1 (6.5s)=K"
where(- = lim sG(s)H(s) (6'56)
is called the static oelocity effor constdnt' We note that ii co:tair-rs an s which indicates
differentiation for once rn t"*""ari;';tflt til fact thai velocity is the fusi derivahve
of the position variable'
Parabotic inPut
Here, 1
R(s) =-s-
| " 1l- - l i ' - I
- . - l
" _ y-i [1 1c1gHG) c .l
1- l i s-
;lt rtlr + c(s) riG)l1
- lim s'?G(s)HG)
1 (6.s4Ko
whereK- = lim s2cG)HG)
(brd)
' ' arhich indicates a sec-is called the statb acceleration conslaflt' Ptediclably' it contans s- '
J.J-d"rlttuti.t" of the Position vadable'

I168 Introduction to Linear and Digital Contol Systems
6.5.3 system Types and Steady-state Errors I
Y"_1,:9:.0.,1n" try." 9l " system_ earlier (Section 2.11). Ir is determined by the numberor pores af the oflgrn (i.e. at s = 0) ̂ exis.trng in the openJoop transfer func'tiorL G(s)H(s),of a system. The general form of G(s)H(si is
'
c(s) H(s) _ {(1 - sTrXl + sTz) ... (1 + sI", )' '
s ( ( l - s4)( t +sTr) . . . ( t +s7l )In Eq. (6.59), k is the number of poles at the odgin. Therefore, it $ a type k svstem,EXAMPLE 6.13 Identify the t]?e of the system for which
^ , , K( ] +3s) j -5s( r l D r 1 - a l l o E l S l = -
s ' s '+6s+7
c(s) H(s) = {++ls)gjjj.ls ' (s " +6s+7)
Solution: Here,
(6.se)
(6.@)
Since the number of poles at the origin is 2 (indicated by s2 in the denominator),twe = 2.EXAMPLE 6.14 ldentify the t'?e of the system for which
C(.) =-,-- j _ and H(s.1 = 5.3s-+bs+/
Solution: Here,
c(s) H(s) = -4(s - 3)
s '+6s+7
It has no poles at the origin. Therefore, irye = 0.
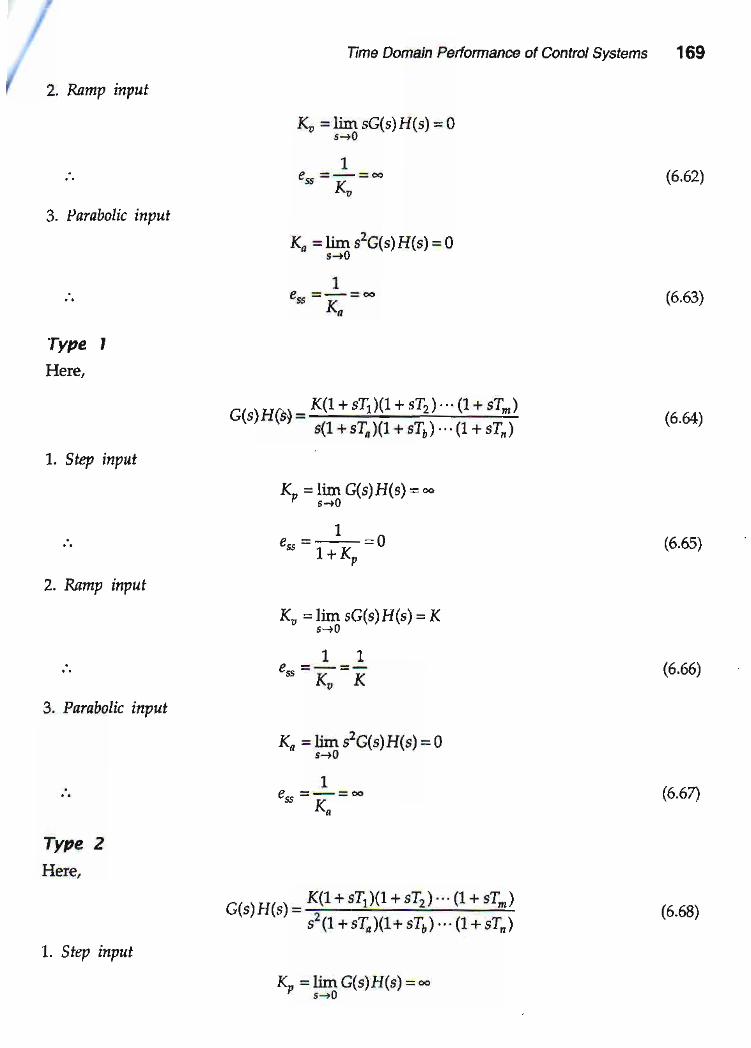
. .With this background, we see how the static erlor constants, and for that matter,steady-state errors are related to t)?es of systems.Type O
Here,
C{s)H(s) _ K(1 + .7r Xt .s I2) . . . ( t + s i ; , r(r + s4 xt+ s4). . .(1 - s4)
Ko =lu1c(s)H(s) = K'1-1 J=7i
11%"= r+ Kp= 1+K 661)
7. Step input
/
/ z. r-*p irrput
fnne Domain Peiormance ot conjtrotsystems 169
3. Paflbolic inqut
Type ,Here,
7. SW input
2. Rntttp input
3. Pffinbolic input
Type 2l{erc,
K, = l imsc(s)H(s)=0- s-ro
1
K- = Iim s2c(s)H(s) = 0
.r . \ , {n\ _ K( l+sT1X1+ 5T2) (1+sT")
s(1+ s4)(1+ sTr) " (1 + si;)
Kp =lil4GG)HG)=-
1^e5s =""--=U
K" = lim sG(s)H(s) = K' 6-i0
11ess=17=A
K- = lim s2c(s)H(s) = 0
1
^. . . , , . K( l + sTlx l + sTr) " (1+sTn)u(srrI (5, = -.;----=i;:---=1----;-:-;-
s ' ( l + s l4xI+ srb) ( r+sr t r ,
& = l imG(s)H(s)=-' s '0
6.4\
(6.63)
(6.64)
(6.65)
(6.65)
$.6n
1. Step inp t
(6.58)
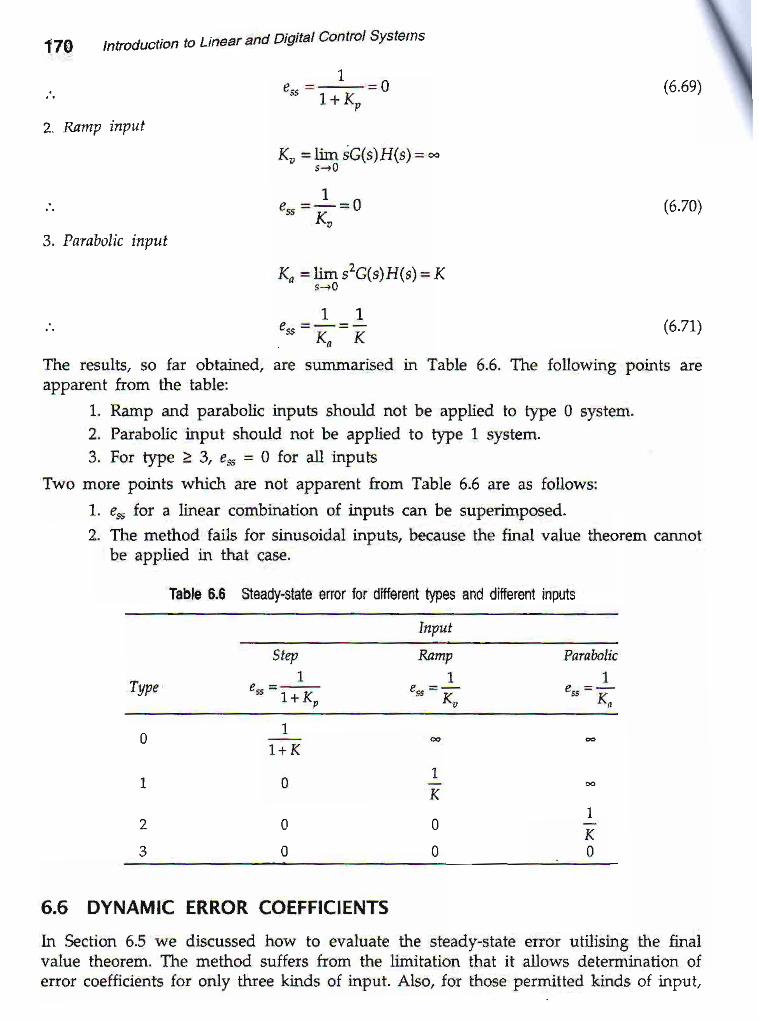
179 lnfuuction to Lineat and Digital Control Systems
.'. e" =-1.=or+q=" 6.6e)
2. Rmnp input
K, = lim ;c(s)H(s) = -_ s ' 0
1^e"" =;- = U
3. Pqrq.boli input
(6.70)
& =lrms'?cG)ruG)=r
. %=K=" 6 .71)The results, so far obtained, are summarised in Table 6.6. The following points areapparent from the table:
1. Ramp and parabolic inputs should not be applied to t)?e 0 system.2. Parabolic input should not be applied to [pe 1 systern.3. For t)?e 2 3, eu = 0 for all inputs
Two more points which are not apparent from Table 6.6 are as follows:1. e* for a linear combination of inputs can be superimposed.2. The rnethod fails for sinusoidal inputs, because the final value lheorem camotbe applied in that case.
Table 6.6 Steady_slale effor for ditferent hpes and differsnt inDuts
WlttStep Rnnp Parabolic
1IWe e" =:---:- e__ =_ll +^ , - K "
1+K
0
0
0
6.6 DYNAMIC ERROR COEFFICIENTSbr Section 6.5 we discussed how to evaluate-.the steady-state error utilising the finalvalue theorem The method suffers from the limitation
'th"i ii
"-d*r determination oferlor coefficients for only tfuee kinds of input. Also, for those permitted kinds of input,
1K0
1K
0
0

l-tme Donain Peiomance of controt systems 171
it does not show how the error varies with tirne' These disadvantages can be overcome
uy fo owing the method of finding generalised error coefficients that are often telmed
dvnamic error coefficients.' The eror function, we iound in Eq. (6.51), is given by
E(s) 1R(')
= 1+ GG)HG)
The denominator on the right hand side of the equation is a function of s
be written as powe! series in s as follows
E(s) 1 . 1- ,7^2,R(r)=&-i<t" '8"
- '
EG)=:RG) ++sn(o +l lKsr+..K1 l(2 ^3
The inverse Laplace transform of Eq. (6.73) ytelds
<n = {,<t. {*,<tt + {ft ,o * "' (6.74)
GG)HG) = KG+4)s(s3+5s2+6s)
find (a) type of the system, (b) static error constants and (c) error due to input fr2
'
Solution:(( '+L\ - - {G+4) . Therefore, we =2.(") GG)HG)=d;i ;6o s,(s, +5s+6)
(b) Since it is a type 2 system, 19 = K, = *.
K, = lim s2c(s)H(s) =tl^:!:'9-=2:' ' s+0 seus -+5s+b J
(c) The input is parabolic. Its LaPlace transform i" RG)=4'
A3A2K
(6.72)
and it can
(6.73)
Ttrerefore, if the input function is known, dynamic error coefficients can be figured out
throueh a compatison between Eq. (6.7a) and the polynomial obtained from invelse
Laplaie transfoim3. The following Lxamples will make the procedure clear'
EXAiIPLE 6.15 For a system having
Therefore,
lSome authors define e or coefficimts as Ci = I/Ki.

'qil172 tntroduction to Linear and Agihl Control Systams nt
EXAIIPIE 6.tG The open-loop transfer function of a servo system with unity feedback isgiven by
500L,(s.f =;I+0_;i
(a) Evaluate the error series of the systen.(b) Deterrrine the steady-state error of the systen for the inpui t(t) = L a 21 * ,2.
Solutlon: Since it is a unity feedback syster; we have
E(s) 1 s+0.1s2R(t=1.cO=sofi;nI'
The long division of the right-hand side of the equation yields
0.002s + 0.000196s2 - 0.000000792tr
500+s+0.1s2 ) s + 0 .1s2ts-r 0.002s2'a 0.0002.s3
0.098s2 - 0.0002dt0.098d i 0.000195s3 i 0.0000196/
-{.000396,s3 - 0.0000195#
+0.000396d r 0.000000792d + ...
E(s) = o.oozs + 0.000196s2 - 0.000000792s3 +...R(s)
E(s) = 9.002t41r1 + 0.000196s2R(s) - 0.000000792fR(s) +
= a ^G) n] r^Gy + =1- s'zn1s1 + ] sanlsy +..'Kt . , Kz
. , K3 " K4
Its invelse Laplace transform Felds
tt,tt\ ,l2r(r\ i3t,'\e(t) = $W2;! + 0.000196 :i+ - 0.00r00ffi792 :-:* + ..
We are given, r(r) = 1 + 2, + t2. Therefdre,
dr( t) =z*2tdt
d3r(tl ^--:-i- = udt'

TirE Dolain Pettomane d contd systr'ms 173
These give
e{t) = o.oa2? + 24 + 0'000196(2) - 0'000000792(0) + "'
= 0.004392 + 0.004,
{a) The eror series of the qrstem is e(l) = 0'00'1392 + 0'004t and the dynamic error
coefficients are
Kr =1=-0
x' =;l==596' 0.002
Kr =:*- = 5102'04' 0.0001%
K ̂ = - ==: *= = - 12626:26 26' 0.000000792
O) The steady-state eror in time-domain is
lim e(t) = lim (0 00439 + 0'004t) = -tr- lJ-
EXAIIPLE 6,17 The opea-loop trarsfer function of a unity feedback system is glven by
G(s)= .4=sls + ru,
Find out dynamic error coefficients and the error series when the inPut is r(t) = 1 + 2t
+* .
Solutlon: It being a unity feedback system, we have
E(s) 10s + s2RG)=50-10;7-
Note that since we want to find out a polynomiat in ascending powers of s' we
have to arrange the numerator and denom:natoi in that order, before Performing the
long division' By long divisiorr we get
E(s) = 925p1t1 - 0'02s2R(s) + (o)CRG) + 0'004#R(s) + -
Its inverse Laplace transform yields
trt t \ ,12,1t\ A3 l \ dar, l . le?r=@\r(t\ +02!y - o.o2 ":i)'/ +(0) " j:i' + 0'004:-:j:' + '
dt dt' dt' dt'
=*n .t#.*#.;#.+#.

174 lntroduction b Linear and Digttat ContlOf Systerns
Drrarrric error coelficimts are, therefore,
& =1=-0
r, =;1.=5
",=-#=-*rn =]=-
0
*G='fo=_The input is r(t) = 1 + 2t + *. 9o,
i t \:::):! =2+ 2t
d2r(t) ^dt'
Thus the error series is given by
4t)=o.2(2+2r-0.02(21= 0.36 + 0.4t
EXAITPIE 6.18 The open-loop hansfer function of a unity feedback system is given by
c1t1=-"---. jP' s'(s + 4xt' + 5s + 25)
l-l"ni:t"::';Fnirldrf; o*ar*tat" error of the svstem when it is subjected
Solutlon: Static error coeffici€nts are
& = lim GG)HG) = tg a,."a, *g-,. *, = -
K" = lim sc{4'(s) = ga,.4# u" - *) =-
&=tims'zc(s)H(s)=u-, loo = 10 =ts+o sro (s + 4Xs, + 5r + 25) (4X25)
Taling the Laplace transform of the input, we get
) L A .R(s)=:1- :a -
5s_s"

rWe obsewe that
the steady-state error
Time Domain Performance of ContralSystems 175
this is a combination of step, ramp and parabolic inputs. Henceis given by
=lim
, -= 2
*4 *4" 1+ Kp K, ("
Substituting the values obtained for the error coefficients, we get
,"=j-*a *!=+
EXAMPLE 6.19 A servomechanism, the block diagram of which is given in Figure 6.17,is designed to keep a radar antenna pointed at a llying aeroplane. If the aeroplane isflying with a velocity of 600 km/h, at a range of 2 km, and the maxirnum tracking elloris to be within 0.1o, determine the required velocity error coefficient.
Sofution: Giver; the velocity = 600 km/h ='166.67 m/s. The radial dGtance = 2km= 2000 m. Therefore, the angular velocity is
u 166.fio = - = --::+ = 0.083 rad / s = 4.756 desJ s
r 20ffi
The input to the hacking system is the angle swept in time t sec. So,
r ( t )=at=4.756t
+ RG)=!iq
The open-loop trarufer function of the system is
G(stHrs) = K'' ' s(1+ sT)
<r1 r <?\ r L1 + G(s) HG) = :-:-l-:j-1-:jr
s (1+s i )
Thus, the steady-state error is given by
&
Figure 6,17 Block diagram of servomechanism (Example 6.19).
s,o 1+ G(s)H(s)

176 tntrcduction to Linear and Digital Control Systems
. . 4.756 s(1 + sT)s+0 s ' S ( r+s l ) f I \ z
4.7ffiK.
To maintain steady-state tracking erlor at 0.1o,
4.756 ^ "K1
or K' = 47'56/s
EXAIIPLE 5,20 Find tyPe, error coefficients and eo for the system, shown in Figure 6'18,
for the inputs (a) r(t) = 12, (b) 7(t) = 6r and (c) r(t) = 12 + ot + l*'2
"-t.l = --- 2-- ' ' - ' (s+sxs+10)
H(s) = 55
Figure 6.18 Block diagram lor the cofirol system (Example 6.m)
Solution: The block diagram can be reduced to give Figure 5'19'
Flgure 6,19 Beduced block diagram (Exanple 6.20).

rTherefore, the open-loop tmrsfer function of the system is
10c. 250 250cc) H(s) =
| -eHl = (r- t/G' r0)- rrsr
=; - t40r - 50
It has no poles at the odgin. Therefore, it ls a t,?e g sygtem For a t)?e 0 system' only
the static position error coefficient, Kp, exists, its value being
,q0Kp = lim c(s)H(s) =
l* 7; = s
Time Domain Performance of coni{.olsystems 177
Therefore,
- . sR(s) 72P = l r m-"
*d 1 + G(s)H(s) 1+ Kp
Therefore,
, = l ; r n 5 = --s
s -tj s[1+ G(tH(s)]
- . . L2 6 LK(s)=-+-+-
s s- zs-
Since erors for individual inputs can be superimposed and we have aheady seen that
"" l"t tf-," second Part is -, wlthout calculathg it for the third Par:t we can say that for
this input also e," = -
EXAITPLE 6.21 Determine the range of values of K of the system shown in Figure 6'20
so that es < 0.004 when r(t) = 0'2t-
_ . . 12(a) Here, l<(s) = -
O) Here, R(s1={
(c) Here,
Solution: The
Here,
Figure 6.20 Control system (Example 621)
open-loop transfer function for the system is
KG(s)H($ = ^
rt! f r./
s (s+1)+Kl-CG)H(s)=-
t\r T r./
t(t) = 0'2t
- 02K(s) = --5-

178 lntoduction to Linear and Digital Contot Systems
Therefore,
e*= j inr - - * ] : -sro 1+ c(s)H(s)
=umlo;2 : 'G+1) Is - 0 1 a . . . t c L v l
,. 0.2(5 + t)- |Ur _-i-
s ros -+s+K
o.2(
From the given condition
0.2--=K
< 0.004
.. 0.20.004
K>50
6.7 EFFECTS OF ADDITION OF POLES AND ZEROS ON RESPONSE OFSYSTEMS
]: : .t"=Tg to. study the effects of addition of poles and zeros on response ofsystems. While doing thal we will restrict ourselrres' io
-"".onJ ora", underdamped
:I^tj:ff_Td. r*p.tesgonsg on! t"q,,"ys,"* .url U-" ,"p."r"rrt"a by their open_loop orciosed-ioop hansfer functions. We will coruider bo& separately- The other 'urro*p.tio"
is that poles and zeros wil be locared ," th" dft_ili';;J} "^_ro""".
6.7.1 Addition of poles
As told earlier, this studv can be made-on open_loop and closed_loop tralsfer functions.:t""T*"
*" srudy meaningtut, *e "on
conliae. uiiq, i""-Ju".i'iy,"*" for openJoop
Closedloop transfer functionLet the closed-loop transfer function be
Obviously it is a second order.system with q = 1 and f = 0.3. We add a pole to make
1rI (sJ = -a-. -
s '+ 0-6s+1 r r 's+1
(6.75)TG) =-"----:-s '+0.6s+1
(6.76)

ii'Figorc 6'212ar .d4
Time Damain Peioman@ ot control systems 179
shows step responses for the system represented by Eq. (6.75) lor ro = 6, 1,
1
0.8
0.6
0.4
0.2
00 2 4 6 8 l0 12 14 16 l8 20
_---__-_________>, (s)
Figure 6.21 Step responses for Eq. (6.75).
Here, we obsewe that as ?p increases, rise time increases, but peak overshoot decreases.We add, though observed in a Particular case, the conclusion is general.
open-loop trdnsfer functionLet the oDen-loop transfer furction be
G(s)=--1-D\' T Z,/
We add a pole at s = - a to make it' t p
4t\ r.4
1l"
(6.n)
s(s + 2)(1 + ros)
feedback closedloop transfer
c(s)i ( s l = -" 1+G(s)
1
The coresponding unity
. / . r ? \ r 1 + r < \ + 1! \ , , _ t \ _ - p t , i \
function is
(6.78)

180 Introduction to Linear and Digitat Control Systems
,,*rJ1lr.tt"o responses of Eq' (6 78) corresponding to 6 = 0, 1,2 a d 4 are plonec
tu tz 14 16 lt 20
Figure 6,22 step responses for Eq. (6.78). --"-------' t(s)
It -may
te^observed from this plot that 1s g ircreases, both peak overshoot and dse timemcrease. An increase of a means that the fob comei "for"i
io tf,u o"g_ in the s_plane.The conclusion, though <irawn for a particular """",
i, i" J;l ;;tte generat.
6.7.2 Addition of ZerosAs in the case of poles, here also..we will consider open-loop ard closed_loop casesseparatety and a unity feedback will U" .o.siae..a-]oi.ie ;;:#"p.Closedloop transfer functionLet the closedloop transfer function be
1r (s, = ;r_:_::;
We add a zero to it at s = _1/r. so that
7+ t_sI (S) = --:-----j--
s '+ s+ 1
4t) 1.5tII
(6.7e)
(6.80)

fime Domain Peiormance ot Controtsystems 181
Equation (6'80) can be written as
1 1
T(s) = ---:---= * ""s
- , -s '+s+1
- s '+s+1
So, if c(t) is the step response of Eq- (6.i9), that of Eq' (6'81) will be
c^(tl=c(t\+r, .Lc(t)' - d t
Figure 6.23 shows the Ploi of c(f), t.!c$) and cg(r) It is clear lrom the figure- d t
that the zero term decreases the rise time but increases the Peak overshoot'
(6.81)
(6.82)
I 12II9 re
6
0.6
0.4
0.2
0
4.20123
-_______) I (s)
Figure 6.23 Efiect ot addilion of zero to closedloop transier tunction'
OpenJoop transfer functionLet the open-loop trarsfer frmctioa be
1G(s, = -_-s(s + r,
and the zero a1 5 = -1/t. Then the unity feedback closedloop iransfer funetion becomes
7+ c-sT( <\ = ---------:-- ' ' '
(1+t s )+s(s+1)
(6.83)
(6.84)
182 lntroduction to Linear and Digital Contrcl Systems
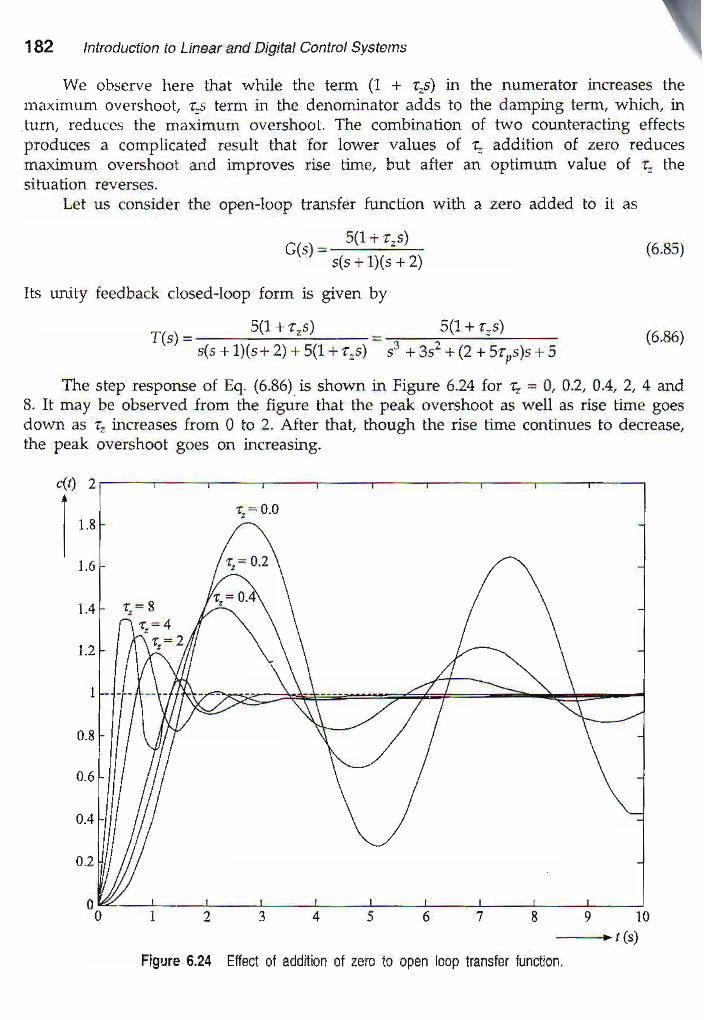
We obsewe here that while the term (1 + z-s) inma\imum overshoot, r:) term in the denominator aJds totum, reduces the maximum overshoot. The combinationproduces a complicated result that for lower values ofmaximum overshoot and irnproves dse time, but aftetsituation reverses.
Let us consider the openJoop
the numerator increases thethe damping term, which, inof two counteracting effectst: addition of zero reduces
an optimum value of ?, the
(6.8s)G(s) =5(1+ r"s)
s(s+1Xs+2)
Its urLity feedback closedJoopform is given by
transfer function with a zero added to it as
__>, (s)
open loop lransfer iunciion.
(6.86)s(5 r l l (s -2) 5(1 - r .s ) s r +3s2+(2+5rrs)s
"5The step response of Eq. (6.86) is shown in Figt,re 6.24 lor t = g,0.2,0.4,2,4 a d
8. It may be obsewed- from the figure that the peak overshoot as well as rise time goesdown as ?, ircreases fiom 0 to 2. After that, though the rise hme continues to decr&se,the peak overshoot goes on increasing.
c0
I
0.8
0.6
0.4
o.2
Figure 6,24 Effect 0f addition 0f zero to

fime Domain Petormance of Contrcl Systems 183
The results of addition of poles and zeios are summarised in Table 6 7'
Table 6,7 Sumrnary of effects of addilion of poles and zeros
As the PoIe fiearc Lhe origtn As the zero nears tJle origin
Type of tnrsferfurrction
Rige tu e
t l
Peak o7)ershootM.
Rise timetl
Peak ooelshootMP
Open-looP
Closed-looP
Decreases up to ace*ain value of t butincreases thereafter
Increases
lncteases
Increases
lncreases
Decreases
Decteases
Decreases
6.8 MINIMUM AND NON-MINIMUM PHASE SYSTEMS
In section 2.14, we had talked about minimum and non-minimum Phase systems' HeIe'
;";;;;',; see the dirterence.:j :T"?:*'*i:':::; il:"'il:",tiil, in rheir rransrer
We recall, minimum Phasefur.;"r. i;t# ,yr,"- i" oi.o.--iri*l.- phase, the sweep.in phase area is larger' Let
us compare the unit steP lesporues of minirnum and non-minirnum phase systems' the
"--rr?.'run.no* of which are given by
c(4 = 6-"1'; =
the unit steP
- (+ l
;! 'a =c",**,ts)=;--x(s)
response of the sYstems in Figure
1.4
1 .2
0.2
0 6Time (s)
-n----"--s" +s+1
(6.87)
(6.88)
6.25 and Figrrre 6.26
and
We presentrespectivelY.
1
E 0.8
E 0.6
0.4
12l0
Figure 6.25 Unii step response of a mlnlmum pnase sy$em'

1A4 lntroduction to Linear and Digitat Contot Systems
1.4
1.2
I
0.8
0.6
0.4
0.2
0
4.2
r'od
'"lffii,',,i,,'i;'.'[3,:','J.'fff ' ; ;frT",fr:um::;fiil;,il l,:li''l*'. The difference in behaviour ig',1-4df ;]1#ll1llilJlifl l,*"1,flffi ':,,,1hlj*:l;trfiilf j,T:
t2l0
lEYlEw Qurslor.rs1, Choose the correct artswer:
"' T".Hff:'ff;Tation or a svstem is s2 + 2s +2 = 0. rhe sysrem is
riiii """,i",i.pi1"'* .1_-'j :3:.oTo"o@1 ror a controi f1"m to be ,
ttt' none of these
oampng ratio should be JPerated in overdamped conditiory the value of the
(i) 0(iii) 1
(ii) > 1
(c) The steady-state error for a (iv) < 1
(i) zero tPe 3 sy-s.tem for a unit step input is
(iii) one .$l ffH,t(d) The open loop transfer function of a system is l0 . *o ",due to a unit step input is
-'- 1+t
rrre sready-state error
(i) 10
, . . . ' 1{r1l l -'11
the final value is
(i) 1.2 s(iii) 2 s
(i) increases dse time(iii) increases ovelshoot
l1me Domain Pefiomance of Control Systems 185
(ii) 0
(iv) -
(ii) 1.6 s(iv) 0.4 s
(ii) decreases rise time(iv) has no effect
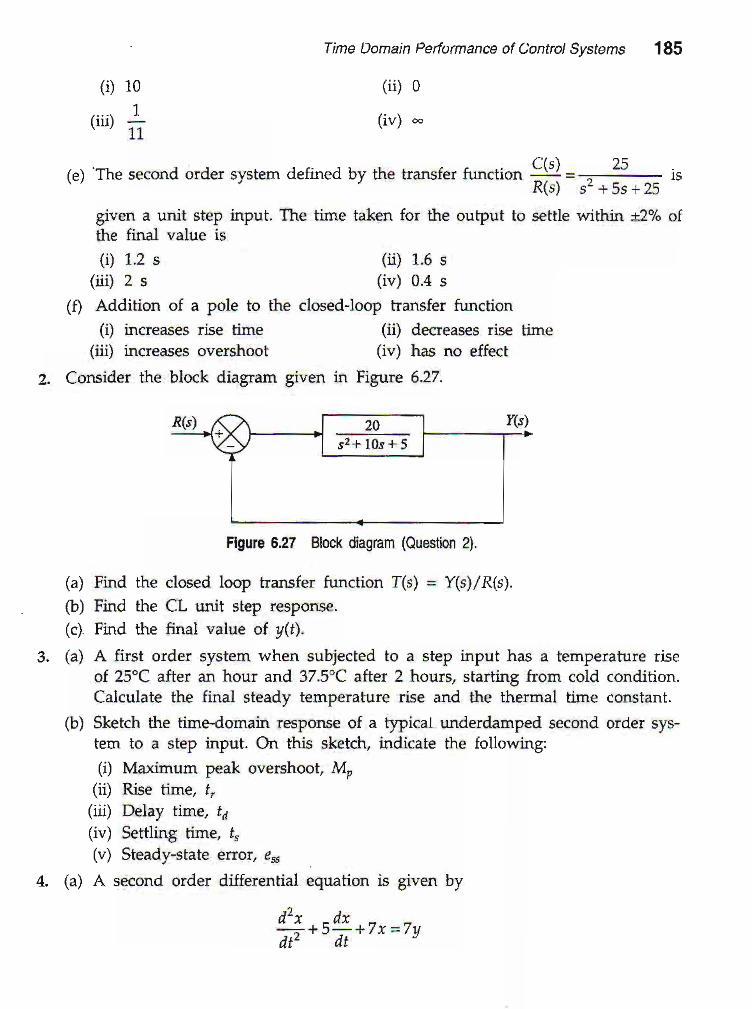
(e) The second order system defined by the transfer f,-.t." ffi
= - . 3 * "
given a unit step inPut. The time taken for the output to settle within i2% of
(0 Addition of a Pole to the closed-loop transfer function
2. Corsider the block diagram given in Figure 6 27'
(4,
(b)(c)
3' (a)
Flgure 6.27 Block diagram (Question 2).
Find the closed looP tlansfer tunction T(s) = YG)/RG)'
Find the CL unit steP resPonse.
Find the final value of Y(t).A first order system when subiected to a steP inPut has a lemPerature nse
of 25'C after an hour and 37.5'C after 2 hours, sta*ing from coid condition'
Calculate the final steady temPerature rise ard the thermal time constant'
Sketch the timedomain response of a tyPical underdamped second order sys-
tem to a step input. On this sketch, indicate the {ollowing:
(i) Maximum peak overshoot, Mo(ii) Rise time, t,(iii) Delay time, l;(iv) Settling time. ts(v) Steady-state eror, e.s
4. (a) A second order differential equation is given by
(b)
d2x -dx - --"=* 5":- ' l /x = /Vd td t '
186 lntroduction b Linear and Digitat Control Systems
Find ihe following:
9.
(i) Undamped natural frequency(ii) Darnping rabo
(nf Darnped natural frequQncy(iv) Damping coefficient(v) Time constant
(b) Explain the unit impulse response of a first order systen.
fin9 the, expression for per cent peal overshoot of a second order underdampedsystem due to unit st? input_
Coruider the unity feedback system with GC)=- I( ^ . ff K. = tZ, find the per
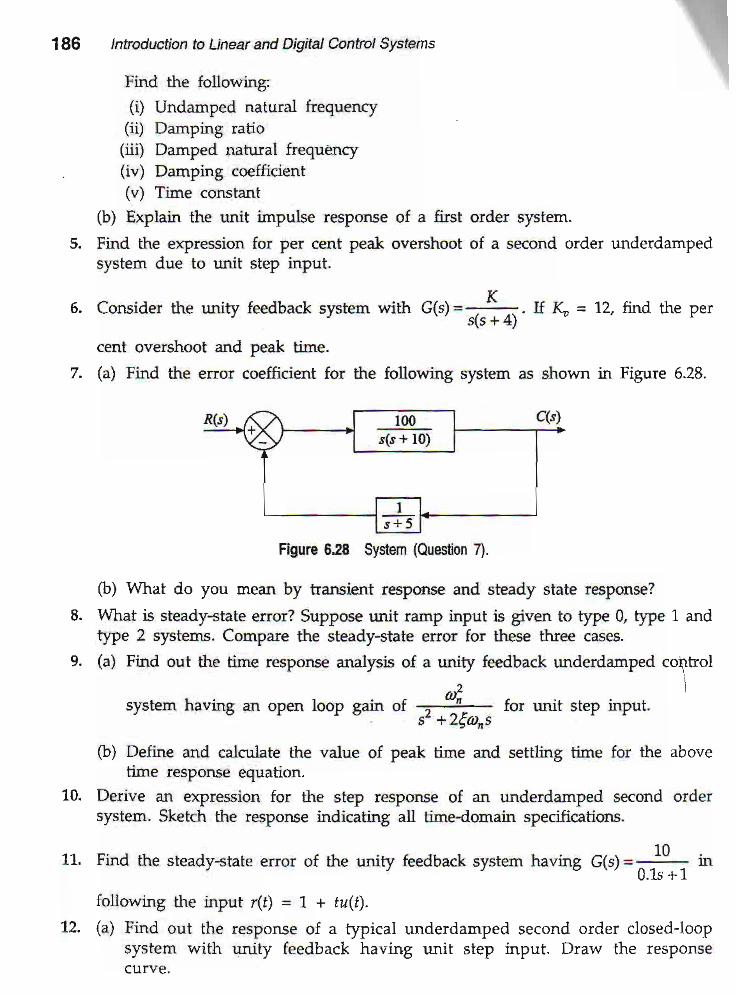
cent overshoot and peak time.(a) Find the error coefficient for the following system as shown in Fizure 6.2g.
Figure 6.28 Sysiern (euestion 4.
(b) I fhat do you mean by transient response and steady state response?What is steady-siate error? Suppose unit ramp inpnt is given to type O type f *atype 2 systems. Compare thJ iteady-state error lor ttre-se three iises.(a) Find out the tirne response anaiysis of a unity feedback urderdamped control
system having an open loop C* " T#€r,,
for urdt step input.
(b) Define and calculate the value of peak time and settling time for the abovetime response equatiot.Derive an expression for the step response of al underdamped second ordersystem. Sketch the resporue indic;fing ;U tirne_doqrain ;;".id;;*.
Find the steady.5late error ol the unity feedback system having C1s;=, :10 . in' - 0 .1s + 1
following the input r(t) = l + tu(t).(a) Find out the response of a tlpical underdamped second order closed_loopsystem with unity feedback having unit st+ input. D.aw the responsecurve.
72.

llme Domain Perfomance of Control Systems 187
(b) A unity feedback second order servo s)'stem has Poles at -1 ! j2 a d zerc at
-1 ! 10. Its steady-state outPut for a unit step hPut is : ' Determine the
transfer function.
19. (a) Sketch the unit steP response of a second order system indicating Peak over-
shoot, dse tilare and settling time.
(b) A temPerature sensing device can be modelled as a fust order s)slem with,a'
time constant of 6 s. Ii is suddeniy subiected to a steP inPut of 30'C to 150'C'
What temPerature will be indicated in 10 s after the process has started?
14. (a) Define the fouowing:(i) Rise time (ii) Delay time
(ni) Settling time (iv) Overshoot
(b) The open-loop transfer function of a uaity feedback control system is given by
AG(t )=r (1*r r )
(i) By what factor should the amplifier gain A be multiplied so that the
dimping ratio is inceased from a value of 0'2 to 0'6'r
(ii) By what factor should amplifier gain be muJti,plied -so- that the overshoot
oi ttt" ,rLlt step resPonse is reduced ftom 80V' to 209? [% overshoot =
r"-----'=100 exP en|/^11- 62I, d = damping ratiol
15. (a) Find out the resPonse of a typical underda:nped second order closed-loop
system with unity feedback having steP inPut'
(b) For a unity feedback closed-loop control system, the open-loop transfer
function is given bY' E
..(s,r=;G;5
Calculate the value of rise time (t') and maxiqrum overshoot (Mo) when the
system is subiected to a unity step inPut'
16. Write short notes on the following:(a) Time constant(b) Settling tirne(c) Peak overshoot(d) Standard test signals used in time'domain analysis of control systems'

BASICS OF CONTROLLERS
7.1 INTRODUCTION
3" h9* that an automatic cont(l".",Hi',",HT;##t;iH;.]i{:rfi "ffi ff ":jff #Fi"#"{'T#i:"{lt:;
Disturt ac6CoEpaaatoaDcsirEdyrlue MaiF&red
Cotrtoll€d
Figurc 7,1 Automatic &)
conrot system: (a) openloop and (b) closeoroop.
fl*;,*ftd,#$$i1**ld**$,ffi 't"ff .:*tjtr188
Basics of Contrclters 189
1. ProPortional2. Inte$ar
i"ffi i!'x*T":'.i:1"" :ii:"T"ff ,f; iJ-h?1":':1d".",:J'S""Jiil;rharacteristics So' controllers can oe urvruEu
on their mode ot contror:
t. Two-posifion or ON-OFF controUer
2. ProPortional (P) cortrouer
3 InteFal (I) controller --.4 Dedvative (D) controller
i. proo-tio"uf Plus inte$al (PT) conholler
i. i""i"tn*"f plus derivative (PD) controller--.
i. or"'p-,t"rr"l ptus integral plus derivative (PID) controuer
h the fouowing sections we will consider these controllers and evaluate their
perfolmance'
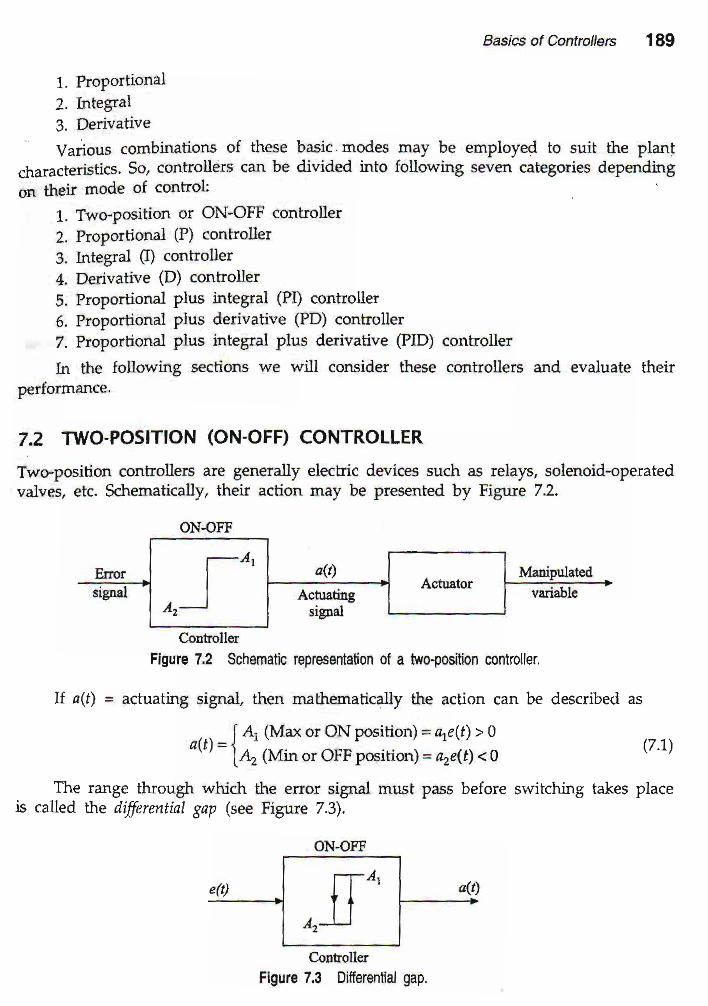
7.2 Two-POSlTloN (oN-oFF) CONTROLLER
rwo-position contr?Tl,:.:':,i:.^::',Lv^ "i":xx"?:::il:1;i,'$ll";;:'*"'o-operatedvalvel, etc. Schematicary' theu a
Contoll€r
Figure ?'2 Schematic representaiion ol a lwo-posftion controller'
d(t) = actuating signal, tJnen mathematically the actron carr
I A, (Max or ON Position) = ale(t) > 0a(r) =
la, 1r',,tin or oFF Position) = nze(r) < 0
The range through which he error signal must Pass before switching
, iii u""ai6rrrrrit gaP bee Figue 7'3)'
be described as
(7.1)
takes place
CoDfroller
Figure 7.3 Differential gap'
ON-OFF
--4,
IAz-
ON.OFF

190 lntroduction to Lineat and Digital Control Systems
The advartages and disadvantages of this t'?e of control are ljsted in Table
Table 7.1 Advantages and disadvantages of on-ofi controller
Adoahtage Disadaantage
Simple, economical. Used in domesticapplances as well as in industry where roughcontrol t5 necessary_
Transient conditions and steady-state accu-racy a.re not much improved.Controller condition oscillates around theset point.
1 .
2.
7.3 PROPORTIONAL (P) CONTROLLERIn a proportional controller, the actuating signal is proportional to theMathematicalln if ri(f) = 6gtu6tin, signal, the;
a{t) e e(t)
= Kf(t)
e[or signal.
(7.2)
(7.3)
The Laplace transform of Eq. (7.2) is
Here, with the
Figure 7.4 Second order system.
proportional controller
K r,fGG\HG!=
" P-'' ' s (s + 2€a4\
sR(s)" , -o1+c(s)H(s)
,aG) = I(pEG)
I^n:l: *l b called the controller gain. Though generally its value is greater than 1, it canoe ress rnan I ln some applications. Since in most of the cases ii ampJifies the errorsignal, it facilitates deteiti-on of small deviations and its eventuat remedy by theactuator.
7.3.1 Accuracy
Consider, for example, the second ord.er system given in Figure 7.4.
Therefore,
addition of a

/
Basics ot Conttolle6 191
=lim
input
RamP inPut
In this case,
Parabolic inPut
ln the case of ParaboUc inPut'
- r , * t ' ( t *26 ' " ) ^ .R(r )- iii s(s + 24a,) + Kvroi
(7.4)
sR(s)K"o;
'1 -L- s(s +2€ot )
StePHere,
- - , , ' - t ' ( t * 26 ' " ) = .R(r )""
- i36 s15 +260t"1+ Xrto;
szG +2{to,1 1- l i n ; . --
iI6 s9+z€a,l + Kpai s
s(s + 21a"\- 116 ------'------.7-
iI6 s1s + 2(a,) + Kra4-o
.. sR(s)'" - li 1+ GG)HG)
-r .^ s2 (s + 2€a, ) - .1-- ?)d 52 a2s6x1, + Kp(Di s'
Kpa,
(7.s)
(7.7)
(7.6)
_, ._ sR(s)- ;6 1+c(tHG)
_r.^ s2(s +2€ot , ) " .L=*-
il6 sz + 2s€a^ + Kptt s"
7.3.2 Advantages
The following are the advantages of proportional controllers:
1. This tyPe of controller *t'"*"' *t io*artl Path gain ^We
have seen in Eq (5'20)
that an increase t tn" 'otiiutJ p"tft g"nt increases the undamped natural
192 tntrcduction to Lineat and Digitat Contol Systems
fl".1T::r,":L-**1..1,y1, ,*d*:s the damping rario {. so, the resl,if;n:: J:ffi "l::, ::::s:Tni.;'::tT"'J:-i:!:r:';j:::'i:' ffi '';.:1';lwjlT::.1-.1":" * jncr:asd pe"i o,,e.shoot ,h;;sh ;;ffis.;.'; H:Tlil, ;"",f ;""1';:l; iT.:.tT ,l1i1*: of contro'er, { .1 ;-;; ",l, ,,?*'ff.""^B: *g:l j; ,.':,*" fl :';[ "p {#;i; :s ;:"*:":] ; J ,*' ;,T,::J"ilif K, is too high.$,;.i.T';.T:""i K, irn pr ies i";;,'{;;; ;;il,li ;:;?tr;',# ;ystem u$table
3. It is a stable control as long as (, is not high.
7.3.3 DisadvantagesThe following are the disad.vantages ol proportional controllers:t
fi"%Tl.*"yil::rroller causes offset, i.e., it may cause a sustamed deviarion from2. It increases the maximum overshoot of the system because it lowers t
7.3.4 Realisation
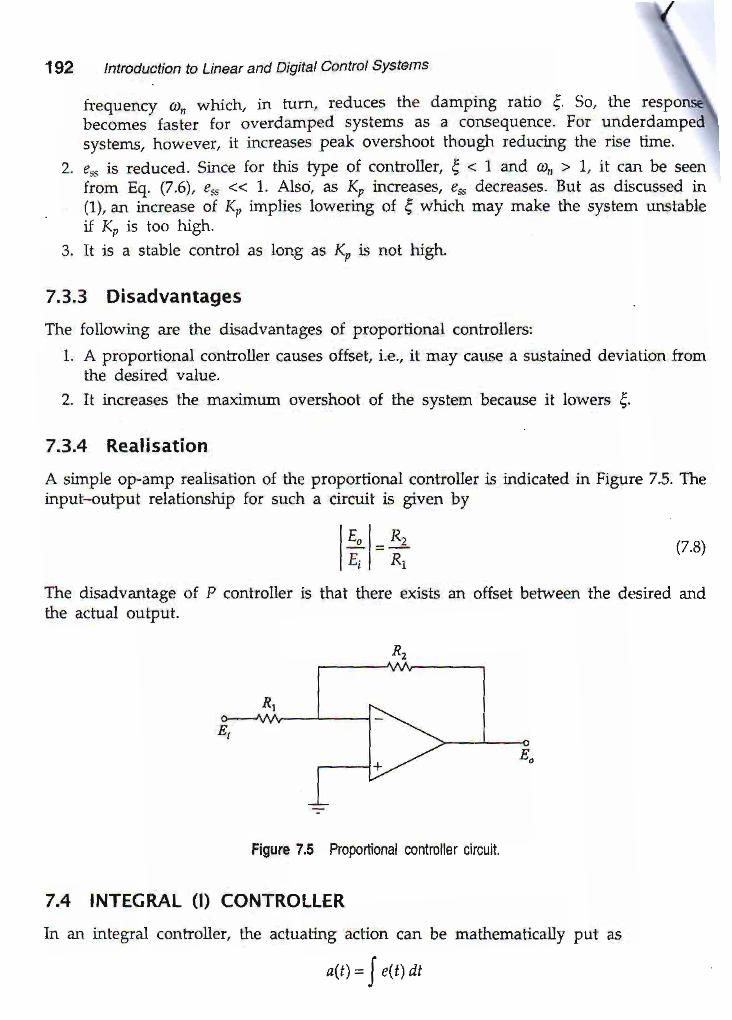
A simple op-arnp realisation of thrinput-output *tu"*l,+^1", "*i :':i*if;:iloller
is indicated in Figure 7.5. rhe
(7.8)
ft" iil:ltff#:i or P controller is thar there exists an offset berween rhe desired and
Figure 7.5 proportional mntroller chcujt.
7.4 INTEGML O) CONTROLL€R[:r an integral controller, the achratrng action can be mathematically put as
a@=Ie\dt
r, I n,E, I Rt
=x,le@dt
Basi6 ot controtleg 193
(7.e)
(7.10)
(7.73)
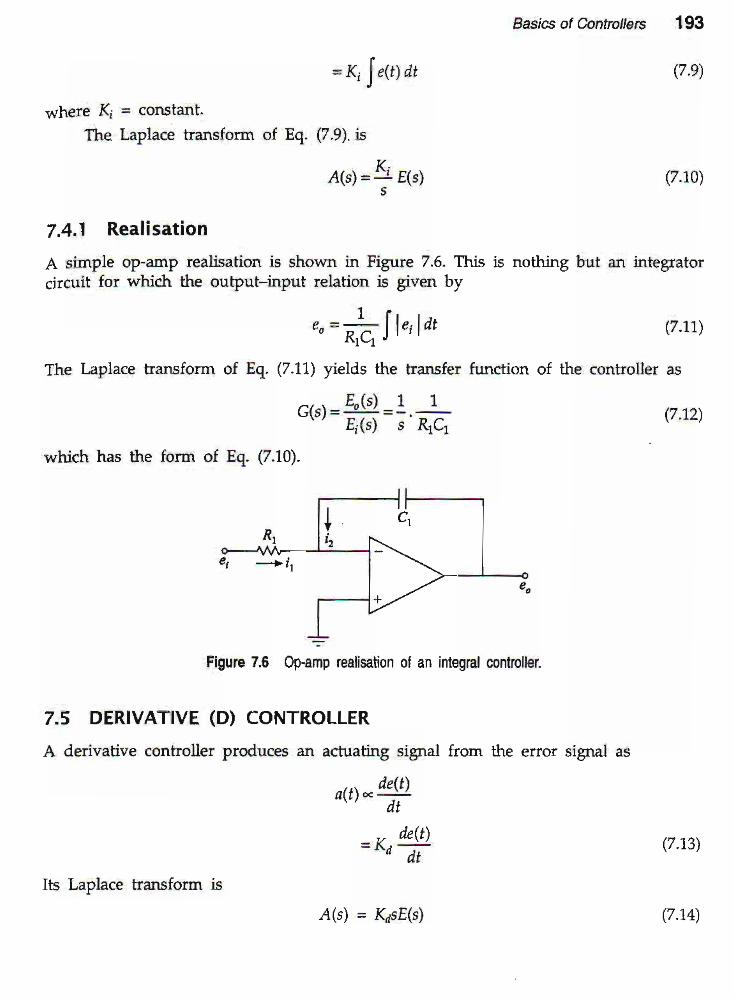
7.4.1 Realisation
A simple oP-amP realisation is shown in Figure 7 6' This i5 nothing but an integrator
clrcuit'for which the outPut-input relation is given by
,"=]7l1,,, lat (7.r1)
TheLaplacetralsformofEq.(7.11)yieldsthetralsfelfrmctionofthecontlol]eras
61r.1= E"(t) =1. -1= (7.12)-' ' ' E;(s) s R1C1
which has the form of Eq. (7.10).
where Ki = constant'
The Laplace transform of Eq. (7.9) is
AG)=!-E(s)5
7.5 DERIVATIVE (D) CONTROLLER
A dedvative controller produces an actuating signal from the enor signal as
... de(t\alt ) * ---1;-
a t
=K,t9'dt
Its Laplace transform is
AG) = KasEG)
Figure 7.6 Op{mp realisation ot an integral contlollet
(7.74)

(Figure 7.7) of a derivative controlieroutput is rclated to the input as
dr.e" =RC+
a t
From the Laplace transform of Eq. (7.1,5), we get the transfer funcnon
c1s1= &(d = ,tat,(s)
7,5.2 Advantages and DisadvantagesAlso called tl\e rate controlltr, a dedvative controller improves thethe system. The djsadvantages, however, are many:
1. It amplifies the noise signal.2. It may cause saturation effect in the actuator.3. It does not impiove e"" because of generation ol a zero in
_ The disadvartages of a derivative controller far outweish thethat it offers. That is why it is neaer used alone.
194 lntroduction to Linear and Digital Control Systems
7.5.1 Real isat ion
The simple op-amp realisationa differentiator for which the
7.6 PROPORTIONAL PLUS INTEGML (PI) CONTROLLERbr the case of a PI controller,
a(t) = Kre(t) + K, Je() dt
i , t a - 1
is nothing else thajl
(7.1s)
(7.16t
transient response of
the hansfer function.only one advantage
(7.17)
{7.18)
I
Figure 7.7 Derivative controller.
at'l=[r-'f)er"r

7.6,1 Control Action
The achJating action of a PI controller for erlor inPut of a unit steP can be worked out
from Eg. (7'18) asf t -
a(t) = Kou(t) + K; Jo
r(t) dt = ̂ p + ̂ ir
Basics ot Conttollets 195
(7.1e)
Thus a step error signal will produce a ramp actuating signal as shown in Figure 7 8'
7.6.2 StabilitY
To check the stabiUty of a PI controller' let us consider a second order closed-loop
;;;l; *r,i.n rt ij attached (see Figure 79)'
d(t)
t
Figure 7.8 Actuating signal of Pl conro er for step error input'
Figure 7.9 Pl c'onlroller attached to second order pianl'
195 lntodltction to Linear and DigitalControl Sysbms
The overall transfer function of the system is given by
fr*/q1\ s , / "tl-------:-:----- |
s\s + L'anl )-, . c(s)'
R(s) ,r*+ 21ot)s(s
'.('-:.)l(s + K;)of,
(7.20)s3 +2{otnsz +(s+K)r'fi
The characteristic eouation
s3 +2(atns2 +(s + &\(tL =0 (7.27)
possesses tfuee roots. II K; > 2(ao, thm two roots have positive real parts that will makethe system unstable. However il Ki < 2ea,, then all the three roots have negative realparts indicating a stable systemt. Next we discuss the steady-state error, or in otherwords, accuracy that a PI controller offets.
7.6.3 Accuracy
The steady-state error for the system with a PI controller is
sR(s)sss = rrm sE(s, = llrn:--:=#
s+u I + (,(srt,(s)
.. s3(s + 2{ar- )R(s)T-o s3 a l(6,s2 + aj,s + Kiafi
Step inputIn the case of siep input,
€"s
Ramp inputkr the case of ramp input
=lim s3 (s + 2lan1116 s3 + zlat s2 + fi,s + Kaafi,
' 1^
5
1^
Q.n\
v.n)
(7.24)=limT-i6 53 s 2.E6ne2 + afis + x,r,]
' s2
'
rFor a discussion on location of poles vis-i-vis stability oI a system, see Chapter 8 (Seciion g.2).The condition can be worked out usine Routh's rule.
/
Parabotic input
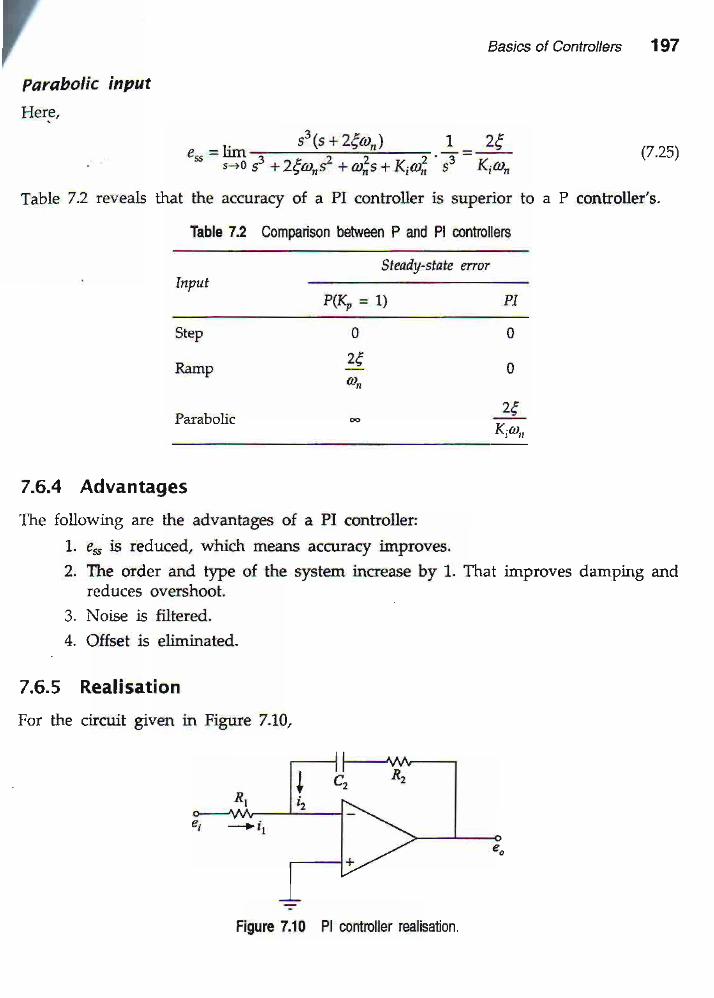
Basic$ at Controlters 197
(7.25)
a P controller's.
Herg,
"., = t:a--r--!-!J4)- -
" ='€
s ao s" + 2E@^e + aj,s + K;afi, ' s3 Kian
Table 7.2 reveals that the acoracy of a PI conttoller is suPetior to
Table 7.2 Comparison bdrYeen P and Pl confiollers
Steady-state enorhtput
Ramp
ParabolicK;@o
7.6.4 Advantages
The following are the advantages of a PI controller:
1. e$ is reduced, which means accuracy imProves.
2. The order and t)?e of the system increase by 1. That imProves damping andreduces overshoot'
3. Noise is filtered.
4. Offset is eliminated-
7.6.5 Realisation
For the circuit given in Figure 7-10,
PI
0
0
0
,"
Figurc 7.10 Pl mniroller realisaton.

198 lntrcduction to Linear and Digital Control Systems
€ i r ,
The Laplace
', = [ I lrlo,, an, = uf J ;,, 1 ar * fr ",transforn of Eq. (7.26) yields
E"G) & 1Ei(s) Rr RrCz,
Ki=Kr*7
7,7 PROPORTIONAL PLUS DERIVATIVE (PD) CONTROLLERIn a PD conholler,
Its Laplace transform produces
,1"t t\a(t) = KDe(t) + K,t ::Y!
at
A(s) " ..t(s)
r tKr=1.
7.7.1 Control ActionU the error signal is a unit step, thm
a(t) = K"u(t\ + Kd ff
= X, * X odln
Flgure 7.11 Ac rating signat of pD contrcller for ramp error signal.
(7.26)
Q.2n
(7.281
(7.2e)
(7.30)
whirh indicaies that the actuating signal is an impulse. However, if the error signal isa rarnp, it is easy to see that the actuating signal is also a ramp lsee figure Z.ifj. -
Basics ol Conttolleg 199
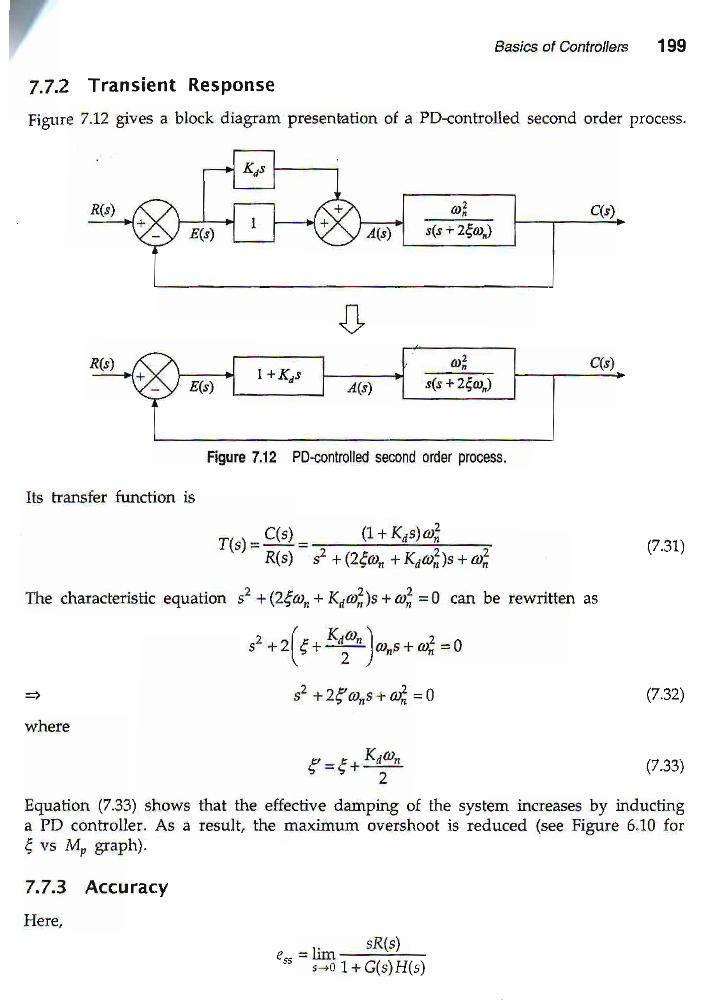
7.7.2 Transient Response
Fiatrre 7 -12 gives a block diagram Presentation of a PD-controlled second order process'
Its harsfer function is
ar<\ lI+ K,s)a;- '-' R(s) s' + (2ltt;, + Kda;)s + tt+,
(7.31)
v.32)
where
The charactedstic equation s2 + (29a,+ Kdz*)s + d = 0 can be rewritten as
,, *z(e *ff),"F+0*=o
s2 + z( ans + a|, =0
, - o -Ko'n
Equation (7.33) shows that the effective darnping of the system increases by indu:qtg
"=pO .o.titoU"r. As a result, the maxirnum
-overshoot is reduced (see Figure 5'10 for
( vs M, gapF.).
7.7.3 Accuracy
Here, .,,=$*#h
sG + 2ea)
PD-controlled second order process.
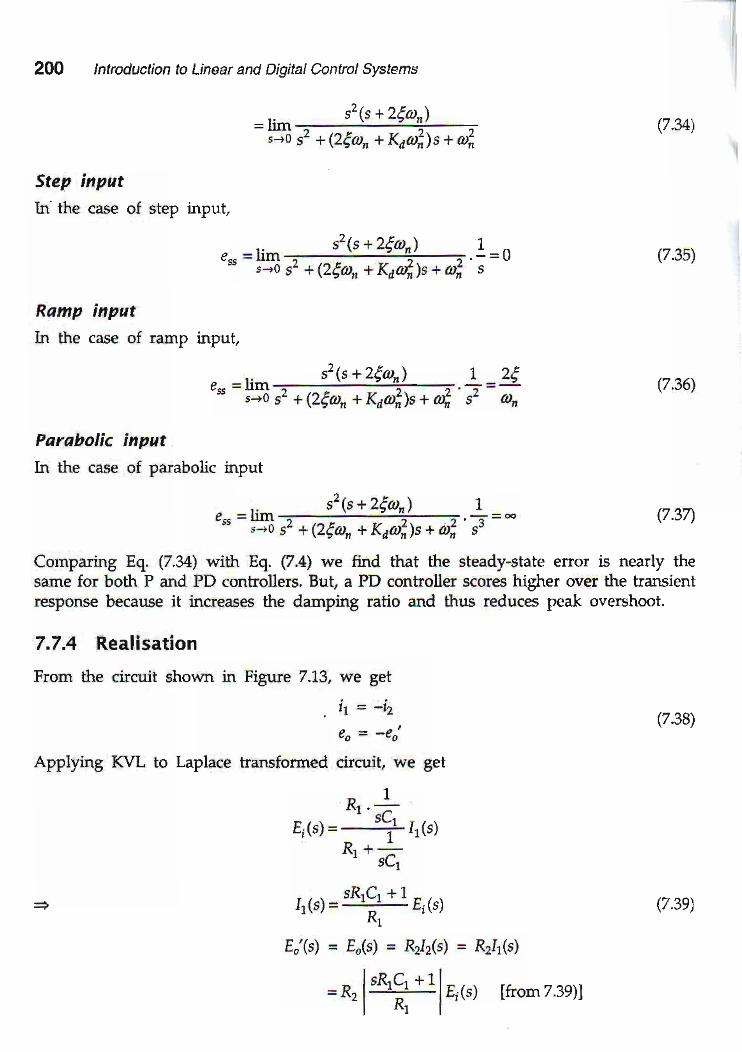
200 lntrcduction to Lineat and Digital Contot Systems
,. sz (s +zta-l= lun ; ' i' =s+o s' + (2lon + Kd(4)s + ot
(7.u)
(7.36)
vsn
(7.38)
e* =lim . sz G +2€a') -
" :-o s2 + (z(a, + Koal)s + ofi
Pdrabolic inputIn the case of pambolic input
s-\s + zgan) I! . . _ : l l l . . i - - - - _ l l l l - l l l l l ! i l l l l l l l ! i - . - = E-"' s-o s' + (z€a, + Kd(4)s + at sr
Step inputIn the case of step inpui,
Ramp inputIn the case of ramp input,
7.7.4 Realisation
From the chcuit shown in
Applyng KVL to Laplace
1_'I = u (7.35)
1 tF
s- @"
Complnlg Eq. (7.34) -with Eq._ (7.4) we find that the steady-state error is nearly thesame for both P and PD conhollers. But, a pD controller scores higlrer over the tansientresponse because it increases the damping ratio and thus reduci peal overshoot.
Figure 7.13, we gei
i=- ize" = -e;
transformed cfucuit, we get
&.1Ei(s, = ----i 11(s)
R, +-' sCr
, . . sR,C, +1- . .11(s)=-- t ' (s )
r"'G) = E,G) = R:rzG) = Rzrr(s)
- IsR'G +rl-. .=n' l=-lEts)
[from73e)l
(7.39\

F
EG)
Basi6 of Contrclters 201
(7.40)
(7.41\
Thus,
7.8 PROPORTIONAL PLUS INTECML PLUS DERIVATIVE (PID)CONTROLLER
As the name suggests, in a PID conholler the actuating signal has the following form:
a(t)= Kre(t\ + K, Iett) dt + x1ff (7.4)
The block diagram of the PID controller acfion is shown in Figure 7.14.
Figule 7.14 PID ctntrol aclion'
Without detailed analysis, we may say based on superposition of enors, tlnt sincethe PD conhol improves the transient Part and the PI control improves the steady-statepajt, a combination of PI and PD imProves the overall control
+h
Flgure 7,13 PD mntroller circuit.

202 Introduction to Linear and DigitalControl Systems
The op-amp realisation of PID controller is shown in Figure 7.15.
Table 7.3 presents a sunrnary of salient features of three basic modes of control to helpselect a controller for a particular process.
Table 7.3 Selecdon ot control ac{ion
Figurc 7.15 PID controller circuit.
Proportional action is chosen if Integral iction is choxn if Deriaatioe actiofl is chosen if
o Load changes are small.o Offset can be toleiated.o Error signal, which is
small, needs amplification.
Offset is not permitted-High degree of accuracy
o Transient lesponse param-etels such as rise time,maximum overshoot, etc.are to be improved upon.
o Plant load changes haveto be tracked by the con-tloller.
aD
7.9 RATE FEEDEACK CONTROLLER
Also called derioatiae feedback controller ar.d. output derioatioe controller, tf\is controllerincorporates derivative action in the feedback path as shown in Figure 7.16.
a( t )=e( t ) -KDdc(t)dt
Figule 7.16 Rate feedback control aclion.
Here,
(7.43)

7AG)=EG)-Kosc(s)
- --,r'o forward Path gain isl n L D " _ -
cG)=!11=s(s + 260")E(s) . . "Kod-
s(s + 2€a^)
== 'ts'+(2(ro,+Keai)s
The overall transfer function is
cG) - G(s)R(5) 1+ GG)
,t*
Basics ol con]/liollers 203
(7 M\
(7.45)
(7.46)
(7.47\
(7.48)
=- d . "s '+(2€a,+KDa;)s+at '
The characteristic equation is
s2 + (2(ro, + Keohs + tfi =g
, -2€a, + Koa*,' 2a^
- o -Kr 'n2
It is clear from Eq. (7.48) that the damPint rafio is increased' As a result (a) the mari-
mum overshoot is decreased, and (b) the nse-rime ts mcreaseo'--'l No-, let us ch€ck the effect on the steady-state ellor'
, =ri, ' '. sR(J)- 's ;n l rc( tH(t
- l, sts-'z + (264r" + Kpg;)slR(:)s 'o st + 121a, + Krai\s ' t'si'
_rn t^G+2€o,+Kp(!:)R(s\_ \7.4sl;-a 3z - 12(a^ L KDD;)S + a;
Step inputIn the case of steP inPut,
" = i^ ?ls- (2€a, - K=pot)l ^ .! =o {7.s0)=' i'jd s'] - (2€d" - KD(4\s+ a; s

204 lntroduction to Linear and DigitalContol Systems
Ramp input
s2ls +(21a)r+KDo?)l 7Here, e-- = lim"
-
"-ri r: + (2(a, - grrz 1t - S "2
2[a, + Krafi=---E-
(7.s1)
Parabolic input
In the case of parabolic input
o _ 1i- .s21s-+-(2€ot:_.+ K_p(4)l _ . L _ _ (7.s2)-*
;; r, + 12{t .r, - K nal,l s + d}, ' s3
A comparison between the PD controller and rate feedback controller, both of whichemploy derivative action, will be of interest here.
7.9.I Comparison between PD and Rate Feedback Controllers
1. The damping ratio increases in both the cases. As a consequence, peak overshootand settling time decrease while rise time increases in both the cases.
2. The PD controller introduces an additional zero at s = -I/Ka trt the closed-looptrarsfer ftrnction while the rate feedback controller does not. We have seen inSection 6.7.2 that the addition oI a zero reduces rise time but increases the peakovershoot. So, even if Ka = Ko, the responses will not be the same because of thiszero factor.
3. The type of the system does not change in both the cases which implies that thepattem of the steady-state error will remain the same for both the cases. However,by comparing Eq. (7.36) with Eq. (7.51) we find that the lamp input elror is higherfor the rate feedback controller.
Next, we define two importart parameters, namely integral square error (ISE) arrdintegral ibsolute error (IAE).
7.IO INTEGRAL SQUARE ERROR (ISE)
Unlike the steady-state error, the inte$al square enor is a measure of the system errortfuough the entire time, i.e. from f = 0 to f = -. It is defined as
2t , .an
$E=l* e2(t)dt
where e(f) = error siSnal.
(7.s3)

For examPle,
Therefore,, ) l t 1 , -
rse = J- f4- sur'1 l\a^.lr
- ( )t + 0] dt whete o = co{' €
r f r,,r l (7.5s)= 2'J_filE-")
:ffjtffi g"t3,"ii'fii,?Jft ihe IsE is dependent on two ractors' namelv damping
Basics of Controllers
for the unit step inPut to a second order system
"-ia t f' t--
.o = -ft t' | (,",11 - ( )r - cos-' 4l
\ i r - 9
205
(7.s4t
7,11 INTEGRAL ABSOLUTE ERROR (IAE)
The integral absolute error is a measure of average erlor over
and is defined . r
teE = Jn le(t) ldt
EXAI/IPLE 7.1 (a) A unity feedback position control system has a-forward path transfer
tunction G(s) = K/s. Fot o^t "d
;i;;t compute the value of K that minimises lSE'
@) The transfer ftnction of a system is 1/(1 + sT) The input to the system is 'u(t)'
f}r" ,]"ip"i-*o"fa track the system Find the value of the ste.ady'state erroi'
Solulion: (a) Given, G(s) = K/s' H(s) = \'
' ,r" =99)' ' - ' R(s)
= G(s)1 + G(s)
Ks+K
KfC(s) =----::- L.
5 (s t ^ , L
L1
a certain time Period, T,
\7 -56)
R(,) = 1ls l
The inve$e LaPlace
s s+K
transform Yieldsc( t )=1-
e(t) = e-Kt

1.zOG lntroduclon to Linear and Digital Controt Systens
Therefore,
lSE= | e ' " 'd tJ o
o-2Kt l'
2i( [
1=2K
This result indicates that ISE -t 0 as K r *.
O) Given,
G(s) = 1' 1+ sT
and since the output would track the system, H(s) = 1.41"o,
r ( t ) = tu( t ) = t fo r t>0
+ RG)=+Therefore,
,. sR(s)-'s ;:d 1+ c(s)H(s)
,. -. ls ( r+s l ) . ,
= l l l t l -s io 2+ sT
Altemativelt we can find the same result from the following study in the t-space. Here,the closed-loop transfer function is given by
C(s) _ G(s)R(s) 1 + GG)
1= 2+tT
Therefore,1/T
L(s.) = ---7-----;T
s- ts+* |\T /
/ 1 D L- - - t - -7 - - - - - - ; -
\5dy ,
Basics of Controllers 207
ihen,
,l 1 1l 'r-l
=-i7-lTl =- 4"-71"=o l'*iJ l.=.
1l r=71,,=-z=i
1TTC(s)='--=--+--7--;
Z , : J , l ^ , - |
\ r . /
, - - 2 1
c l =- - -+-e ''244
e." = rim h(r) - c(f)l
f . - l z r \ l=L^ll+' l1-"-i l lr-*12 a( l l
_, , c(s)' R(s)
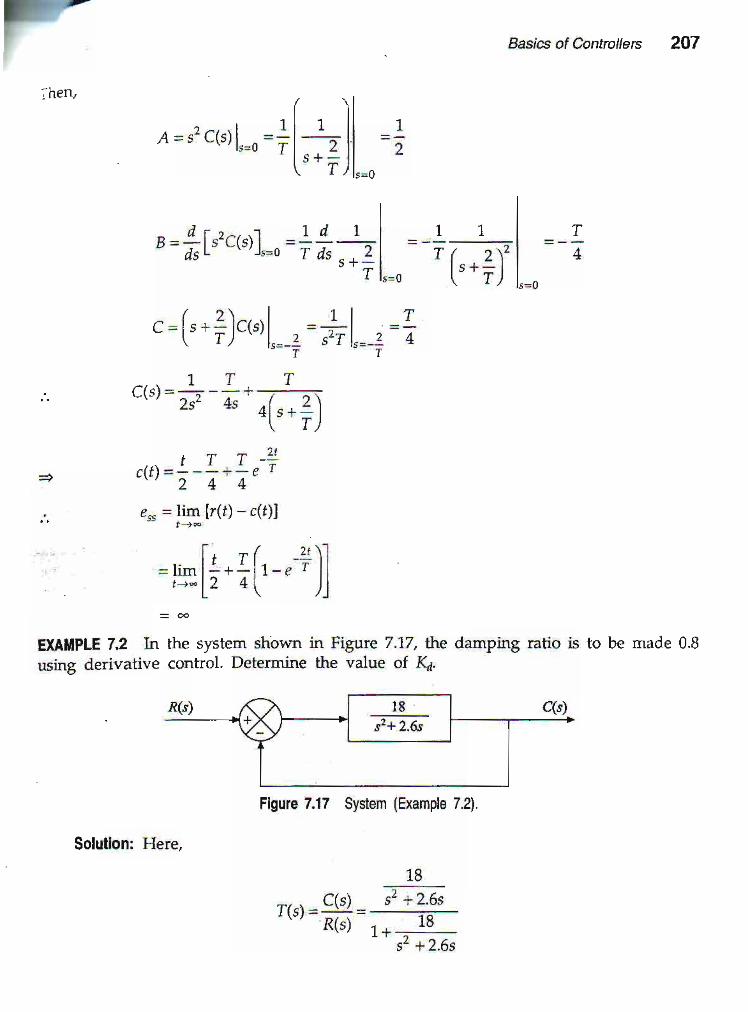
18s2 + 2.6s
18'-?
* L6t
r )la=,,c(,)1,=o=+l+ll =i
I J - ; J I\ r . , l !=o
,=ft1*rt',1,="=l!,
.=[,.i).orl,__,
EXAI|PLE 7.2 In the system shown in Figore 7.17, the damping latio is to be made 0'8
using derivative control. Determine the value of K4'
Figure 7.17 Syslem (Exampl€ 7.2).
Solution: Here,

or
208 lntroduction to Linear and Digital Contrcl Systems
18sz +2.6s +18
Therefore, the characte stic equation is
By comparisory
s2 +2.5s+18=0=s2 +2(rons + of i
4=Ba, = 4'243 rad/ s
2€t'+ = z'0- 2 .O4=
- - =0.3' (2)(4243)
derivative control, 6'has to be 0.8. So,
- - Kaa-€ =E+_z_
= Ko=V-gL@n
= (0.8 - 0.3) 2 =0.24' ' 4.243
EXAi|PLE 7,3 hr the system shown in Figre 7.18, determine the derivative feedbackconstant I(o which will increase the damping factor of the system to 0.6. What is thesteady state eflor to unit ramp input with this setting of the derivative feedbackconstant?
or
Now, with
Solutlon: Given,
transfer function of the
Figure 7.18 System (Example 7.3).
1Gr G) = -:- and H1 (s) = sKo
irurer feedback loop is
G(s) =Gr(s)
1+qG)H1G)
1
tne
s(s+2)+sK,

Basics of Controllers 209
.nd the overall transfer
The characteristicequation is,
By comParisorL
or
or
Therefore,
EXAI'PtE7.4 Figure
function is
- . . Or(s) K,GG)I l s )= -= -" On(s) 1+K^G(s)
K^s(s+2)+sKo+Ka
10s2 +(2+4)s+10
s2+(2+IQs+10=0
= s2 +2(atos + afi
o ;=]u
a" = 3.762 nd/s2ea,=2+19
&=21a^-z= 2(0.61(3.762) - z= 1.8
.. sO" (s)-""
;ii 1+ KAc(s)
1- ' - 2
: lim -------------!-; -d , . 10'-?.rr* lst
=lim s+3.8s-ro s' + 3.8s + 10
= 0.38
the block diagram of a position contlol system.7.19 shows
AEplifie!
Flgure 7.19 Positionctnlrolsystem (Example 7.4).

21O Intrcduction to Linear and Digital Control Systems
(a) In the absence of the derivative feedback, i e', Kl = 0, determine the damPing ratio
of the system for amplifier gain KA = 5'
(b) Find the suitable values of parameters Ka and K1 so that the damping ratio of-the*'
;yrt"^ is increased to 0.7 without affecting the steady-state error as obtained in
part (a).
Solulion: (a) Here,
5
rG)=ffi=s(0.5s + 1)
r -u ---i-- s(0.5s + 1)
Therefore, the characteristic
*
By comparison,,4=ro(4 = 3.'162 lad/s
zEa" = Z
q=-f-=s.s153.1,62
(b) Steady-state error (for a ramp input) for palt (a)
'" =telS*-_ .-o 1+ do;*1)
s2 + 2s+ 10
equation is
+2s+10=0
= sz + 2(ans + afi,
0.5s + 1=lim
,+0 s(U.5s + I) + )
- n t
the inner loop rs
1s(0.5s + 1)
s(0.5s + 1)
1
Now, the trarufer function for
qG)=
s(0.5s+1)+sKi

Basi6 ot contoltels 211
ro, the overall transfer function is
rto=91')=, Kt9'l'1,-'
R(s) 1+ KaQ(s)
KAs(0.5s+1)+sK1=;----E^
-- s(0.5s + 1)+ s(1
KA
05s2 +(K1 +1)s+KA
Ka /0.5-- -'-------7;L'-"
2 Kr+r . l (A
The characteristic equation is
. K+1 K, ^5 _ T - : = - j - - - = = \ ,
u.5 u.J
= s2 +2(ais + aiz
By comPariso&
,f =#' tx;or a; =h5
ztu;=T
or P=Kt+ l ' L
' - 0.5 'zt ;
- t v L 1 \ I : =_..., , 1'{r(e
= 0.7 (grven)
0.7J0.5
(0
Now.1,
sx- - te" = lin]
s-eo r r\Alf---.------::.---:-
s (0.5s + 1) + s&

212 lnboduction to Linear and Digitat Control Systems
=lim 0.5s+1+Kr
Dividing Eq. (i)
Kr +1
by Eq. (ii), we get
sro s(0.5s + 1+ Kl) + K,{
1+KKA
=02 ldetermined for part (a)] (ii)K^
n7JK'=d(ot
Kt = 24.5
l(r = U.ZK,q - 1 [From Eq. (ii)]- l o
1. Choose the correct answer:(a) Excellent transient and steady state resporue is provided by
(i) a proportional action system(ii) a proportional + differential action system(iii) a proportional + integral + differential action system(iv) none of the above
(b) Derivative controllers are nevel used alone because of(i) their large input impedance
(ii) they amplify noise signal and cause saturation of the actuator(iii) they worsen the frarLsient response of the system(iv) none of the above
(c) The measure of average error(i) integal absolute error
(ii) inte$al square enor(iii) steady-state error(iv) none of these
(d) Igtcl of the following control actions is to be employed for eliminating theoffset?(i) Proportional control
(ii) Proportional plus derivative conhol(iii) Propodional plus integral control(iv) None of these
over a specified time period is called