27 equilibrium - school of physicsphysics.usyd.edu.au/super/life_sciences/fe/fe3.pdf · little...
TRANSCRIPT
27
FE3 EQUILIBRIUM
OBJECTIVES
AimsIn this chapter you will learn the concepts and principles needed to understand mechanicalequilibrium. You should be able to demonstrate your understanding by analysing simple examplesof equilibrium. You will also learn about the interactions between fluids and solid bodies as well asthe concepts - buoyant force and pressure - used to describe the interactions.Minimum learning goalsWhen you have finished studying this chapter you should be able to do all of the following.1. Explain, interpret and use the terms
translational motion, rotational motion, rigid body, equilibrium, stable equilibrium, unstableequilibrium, neutral equilibrium, axis, torque [moment of a force], centre of gravity,buoyancy, buoyant force, Archimedes' principle, pressure, pascal, density, barometer.
2. State and apply the relation between force and torque.3. State the conditions for equilibrium and apply them to simple problems.4. Describe and explain how the centre of gravity of a body can be located.5. Describe and explain the forces acting on a body which is wholly or partly immersed in fluid.
Solve simple problems involving buoyancy.
PRE-LECTURE
IntroductionThis chapter deals mainly with the equilibrium of rigid bodies. The conclusions about rigid bodiescan also be applied to some examples of non-rigid bodies, such as bodies of fluid at rest. We startwith two simple examples of objects in equilibrium: an object at rest and one moving with constantvelocity.
All the examples and principles discussed in this chapter are restricted to systems in which allthe forces can be described in two dimensions - a plane. The extension to general three-dimensionalsystems uses the same concepts but is mathematically much more complex.
3-1 TRANSLATION AND ROTATIONThe simple descriptions of motion that we have used so far implicitly treated the motion of only onepoint in a body. That is a good kind of description provided that all points in the body followsimilar, parallel, paths. That kind of motion is called pure translational motion. As well astranslational motion, a body can also execute rotational motion (like that of a spinning wheel) andvibration (like that of a shaking jelly). A body which cannot vibrate noticeably is said to be rigid; itsshape and size do not change significantly when it is acted on by a system of forces. The mostgeneral kind of motion of a rigid body is, therefore, a combination of translation and rotation; theflight of a boomerang is a good example.
FE3: Equilibrium 28
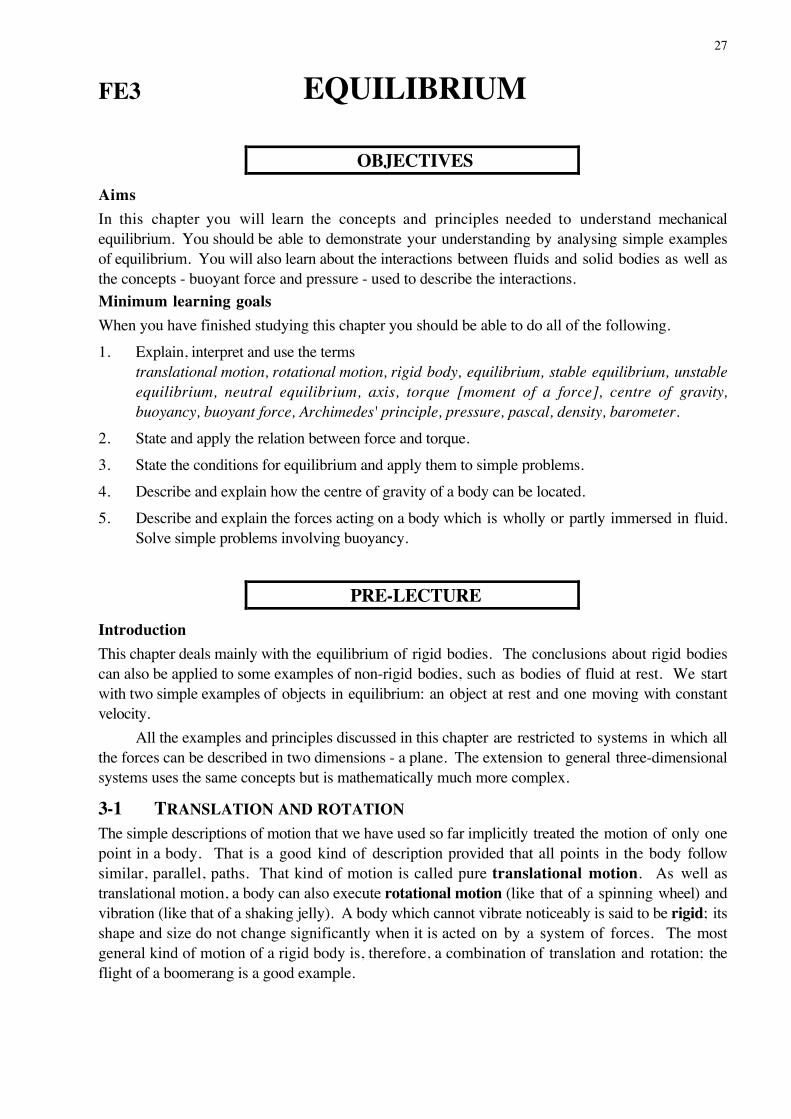
3-2 EQUILIBRIUM OF FORCESQ3.1 A block is at rest on a table.
Figure 3.1 An object at rest. What are the forces?
a) On figure 3.1 draw in all the forces acting on the block.The block is not accelerating, so the net force on it must be zero. What does this tell you about the
vertical forces and any horizontal forces that may be present?b) Suppose that a horizontal force is applied in an attempt to push the block along the table, but the block
does not move. What is opposing the horizontal force?
Q3.2. Block moving at constant velocityA block is being pulled across the table at constant velocity (figure 3.2).
pull
Figure 3.2 An object moving with constant velocityDraw in the other forces.
A frictional force opposes the motion. Draw in this force and the other forces on the block.Again, the block is not accelerating so the net force on it must be zero. What does this tell you about
the vertical and horizontal forces?
The meaning of equilibriumThe examples in questions 3.1 and 3.2 are simple illustrations of equilibrium. In both cases thevelocity of the block is constant, i.e. its acceleration is zero, and the total force on it is zero.
However it is not enough that the forces balance in order to have equilibrium. This guaranteesonly that there is no change of translational motion, i.e. that the motion of the body as a whole doesnot change. The definition of equilibrium needs to be extended to include the requirement that therotational motion of the body also remains constant. Thus, for example, a body which is completelyat rest is in equilibrium only if it does not start to move or rotate. As another example, a wheelrotating about a fixed axle, is defined to be in equilibrium only if its rotational speed does notchange.
In order to consider this rotational aspect of equilibrium we need the concept of torque. Weshall then see that for equilibrium, torques, as well as forces, must balance.
FE3: Equilibrium 29
LECTURE
3-3 TORQUEExample 3.1. Wheel on a fixed axle
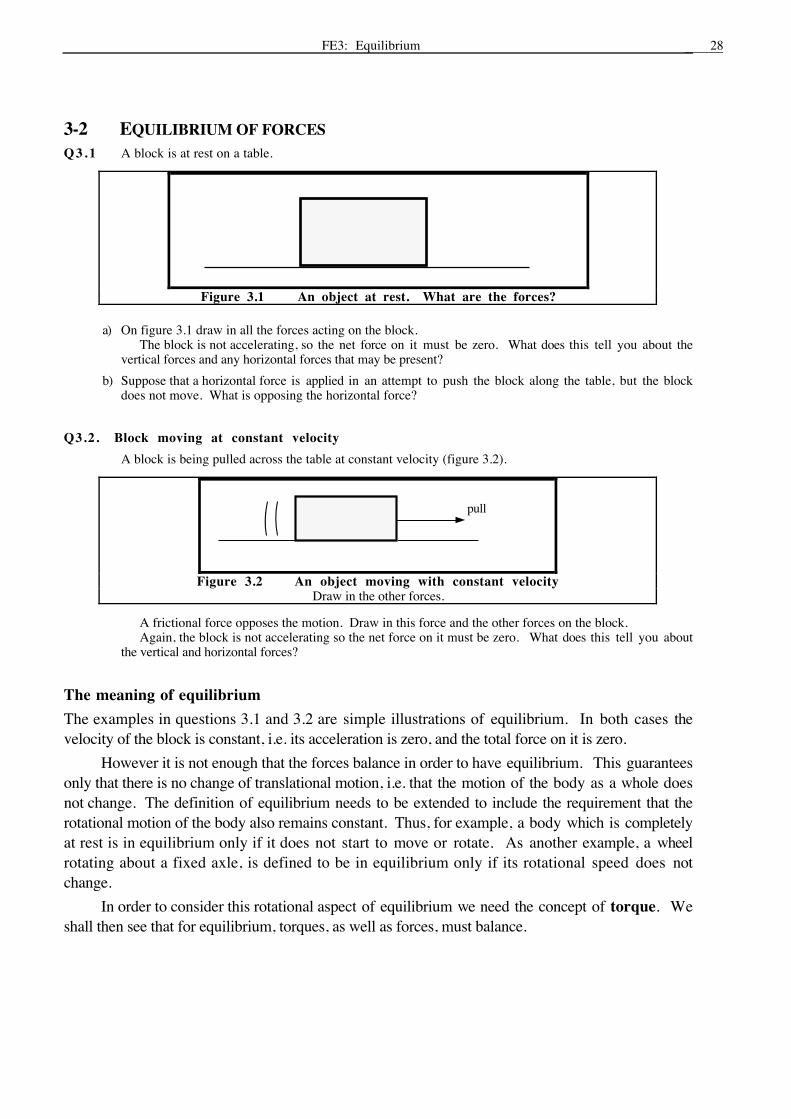
Consider a wheel which can rotate about its axle. The axle remains in a fixed position. Anobject is hung by a string from the rim of the wheel as shown in figure 3.3.
W F
F A
Figure 3.3 An unbalanced wheel
When the object is released, the wheel starts to rotate so, clearly, it is not in equilibrium.The forces acting on the wheel are shown. W is the wheel's weight, FA is the force exerted bythe axle on the wheel and F is the force exerted by the string attached to the falling object,which causes the wheel to rotate. Note that these forces are not all acting through the samepoint.
In this example, rotation occurs about an axis - a line in space - which is perpendicular to theplane of the forces involved. In such cases we define torque as follows.
The torque of a force F about a specified axis is defined asτ = Fx ... (3.1)
where x is the perpendicular distance from the axis to the force's line of action. Torque is alsoknown as the moment of a force. Note that we can, in principle, define many torques for eachforce, one for every possible choice of axis. It is not necessary for the axis to be a possible axis ofrotation.
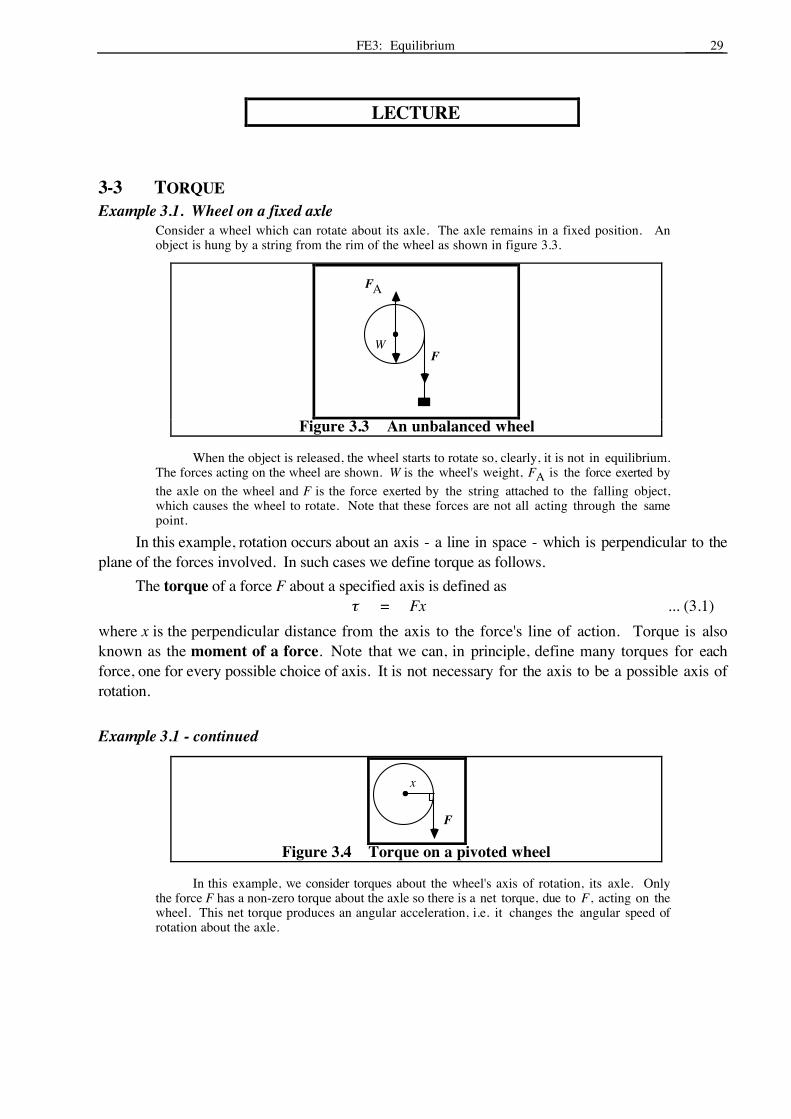
Example 3.1 - continued
F
x
Figure 3.4 Torque on a pivoted wheel
In this example, we consider torques about the wheel's axis of rotation, its axle. Onlythe force F has a non-zero torque about the axle so there is a net torque, due to F, acting on thewheel. This net torque produces an angular acceleration, i.e. it changes the angular speed ofrotation about the axle.

FE3: Equilibrium 30
Demonstrations• Consider two wheels which have the same shape and the same total mass. One has a densemetal rim, the other has a dense metal axle. Identical loads are hung from their rims. Thisdemonstration shows that the angular acceleration depends on the distribution of mass in the object.
metalaxle
metal rim
Figure 3.5 Effect of mass distribution on angular acceleration
Identical loads were attached to the wheels and then released. The angular accelerationwas greater for the wheel whose mass is more concentrated near the axle.
• Other demonstrations show rotational motion when the axis is not fixed.
3-4 EQUILIBRIUM OF TORQUESExample 3.1 - continued
The wheel has no translational motion so the total force on it must be zero.
Torque
Fx
W F
F A
Forces Torques
Figure 3.6 Forces and torque on the pivoted wheelThe vertically upward component of the total force = FA - W - F = 0 , but the net torque, Fx, is
unbalanced. Note that this torque produces a clockwise rotation.Example 3.2: Equilibrium of the wheel
To bring our wheel back into equilibrium, a torque of the same magnitude but in the opposite(anti-clockwise) sense would have to be provided. Another object with the same mass could beattached to the opposite side of the wheel in order to achieve this. See figure 3.7. (Note that thesupporting force FA will take on a new value.)
F
F
F
W
A
Fx -Fx
Forces Torques
Figure 3.7 Forces and torques at equilibrium

FE3: Equilibrium 31
3-5 CONDITIONS FOR EQUILIBRIUMIn general, then, the conditions for equilibrium of an object which is free to rotate about a fixed axisare:(i) total force acting on the object = 0;(ii) total torque about the axis = 0 .
Note that, since force is a vector quantity, the calculation of the net force must take account ofdirections. This can be done using the method of components introduced in chapter FE2. Torque,as defined here, is a scalar quantity whose values need to be associated with either clockwise oranti-clockwise rotation. We can assign positive values to one of these two senses, and negativevalues to the other. (The usual convention makes anti-clockwise values positive.)Example 3.2 - continued
When we apply these conditions to the wheel with two objects hanging from its rim, we canchoose vertically down as a component direction for the forces (all horizontal force componentsare equal to zero).(i) F + W + F - FA = 0 .
(FA takes on a new value when the second object is attached.)The condition for balancing the torques is satisfied because the two torques have the same
magnitudes but opposite senses:(ii) F x - F x = 0 .
It is obviously inconvenient to have to draw two diagrams for each example - one showingforces and one showing torques. Henceforth both forces and torques will be shown on the samediagram. Remember, however, that forces and torques are quite different entities and must becombined separately.
3-6 CENTRE OF GRAVITYExample 3.3. Centre of gravity of a flat object
A flat object is pivoted at the point P. See figure 3.8. Imagine that the object is divided up intolittle pieces. The weight of each piece provides a torque about the pivot. The object will be inequilibrium only if the torques due to all these pieces add up to zero.
P
Figure 3.8 Distribution of gravitational forces on an object
It is obviously inconvenient to have to consider the weights of all the little pieces of theobject separately. Fortunately, their total can be represented by the total weight, W , actingthrough a point called the centre of gravity.

FE3: Equilibrium 32
Centreof gravity
P
Torque
W
P
W
Equilibrium
Figure 3.9 Centre of gravity and the total weight forceThen W provides a torque about the pivot (equal to the sum of the many small torques). The object will be in equilibrium if its centre of gravity lies vertically below the fixed
pivot point. In this position the length of the perpendicular from the pivot to the line of actionof the weight is zero, and so is that from the pivot to the supporting force at the pivot.Therefore the torques of the weight and the supporting force about the pivot are both zero.
Example 3.4. Locating the centre of gravityTo locate the centre of gravity of a flat object, first mark a vertical line showing the line of
action of the weight. The centre of gravity must be somewhere on this line. Then choose adifferent pivot point and repeat the process. The centre of gravity must be also be somewhereon the new line; so it must be at the intersection of the lines.
A wheel is symmetric about its axis and the centre of gravity is at the centre of thewheel. This is easily verified.
3-7 EQUILIBRIUM OF A SYSTEM OF OBJECTS
Example 3.5: Two children balancing on a seesaw.This example is analysed in terms of forces and torques acting on a system which consists of thetwo children and the plank. The forces acting on this system are the weights of the twochildren, the weight of the seesaw's plank and a vertical supporting force at the pivot.
The weights of the children, W1 and W2 act at distances x1 and x2 from the pivot, asshown on the figure. These forces give torques W1x1 (anticlockwise) and W2x2 (clockwise)respectively about the pivot.
Suppose that the centre of gravity of the plank is directly above the pivot so that theweight WS of the seesaw plank acts downwards at the pivot. N is the upward supporting forceexerted by the pivot on the plank. Each of these two forces gives zero torque about the pivot.
N
W 2SW 1
x 1 x 2
W
W 1 x 1 W 2x 2
Figure 3.10 Balancing on a seesaw
For equilibrium the following conditions must be satisfied.(i) Total force acting on the system = 0.
Taking force components in the vertically downward direction:

FE3: Equilibrium 33
W1 + W2 + WS - N = 0.
(ii)Total torque about an axis through the pivot = 0.Taking clockwise as the positive sense:
W2 x2 - W1x1 = 0.
This analysis is essentially the same as that for a beam balance.
3-8 EQUILIBRIUM OF A FREE OBJECTA free object is one that is not pivoted. This is a more general situation than the case of a fixed axis.Demonstration
moves forward
moves forward
moves forward
spins anticlockwise
spins clockwise
no spin
push
push
push
Figure 3.11 Motion of a free objectThe centre of gravity is shown as a heavy dot.
A net force not acting through the centre of gravity of a rigid body will cause translationalacceleration of the object as well as change in its rotational motion. The resulting motion canbe described as a combination of translational motion of the centre of gravity and rotationalmotion about the centre of gravity.
3-9 GENERAL CONDITIONS FOR EQUILIBRIUMThe general conditions for equilibrium are as follows(i) The total force must be zero (as before).(ii) The total torque about any axis must be zero.
In many cases it is convenient to consider torques about axes through the centre of gravity.
3-10 BUOYANCYWhen a solid object is wholly or partly immersed in a fluid, the fluid molecules are continuallystriking the submerged surface of the object. The forces due to these impacts (which are sometimescalled pressure forces) can be combined into a single force, the buoyant force.
FE3: Equilibrium 34
Figure 3.12 Forces exerted by a fluid
Note that, for clarity, we show only the forces exerted by the surrounding fluid in this and thefollowing diagram.
We want to find the magnitude of the buoyant force and the point through which it acts.Buoyant force on a completely submerged object
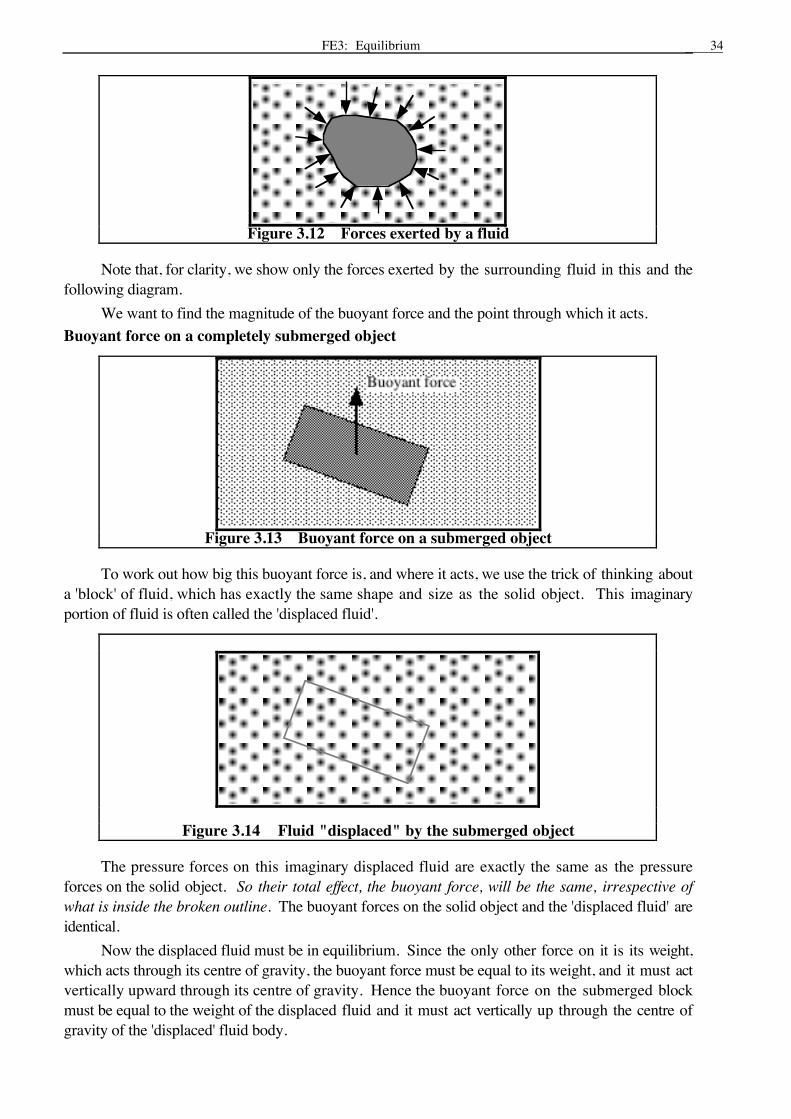
Figure 3.13 Buoyant force on a submerged object
To work out how big this buoyant force is, and where it acts, we use the trick of thinking abouta 'block' of fluid, which has exactly the same shape and size as the solid object. This imaginaryportion of fluid is often called the 'displaced fluid'.
Figure 3.14 Fluid "displaced" by the submerged object
The pressure forces on this imaginary displaced fluid are exactly the same as the pressureforces on the solid object. So their total effect, the buoyant force, will be the same, irrespective ofwhat is inside the broken outline. The buoyant forces on the solid object and the 'displaced fluid' areidentical.
Now the displaced fluid must be in equilibrium. Since the only other force on it is its weight,which acts through its centre of gravity, the buoyant force must be equal to its weight, and it must actvertically upward through its centre of gravity. Hence the buoyant force on the submerged blockmust be equal to the weight of the displaced fluid and it must act vertically up through the centre ofgravity of the 'displaced' fluid body.
FE3: Equilibrium 35
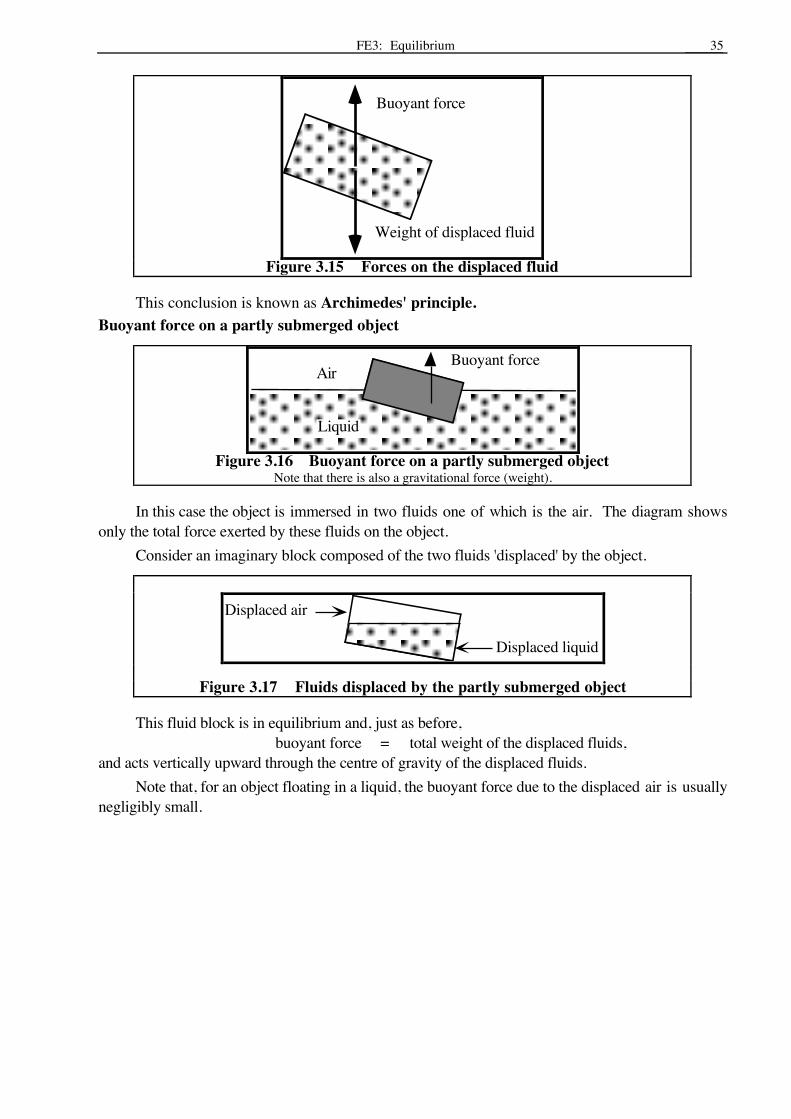
Weight of displaced fluid
Buoyant force
Figure 3.15 Forces on the displaced fluid
This conclusion is known as Archimedes' principle.Buoyant force on a partly submerged object
Buoyant forceAir
Liquid
Figure 3.16 Buoyant force on a partly submerged objectNote that there is also a gravitational force (weight).
In this case the object is immersed in two fluids one of which is the air. The diagram showsonly the total force exerted by these fluids on the object.
Consider an imaginary block composed of the two fluids 'displaced' by the object.
Displaced air
Displaced liquid
Figure 3.17 Fluids displaced by the partly submerged object
This fluid block is in equilibrium and, just as before,buoyant force = total weight of the displaced fluids,
and acts vertically upward through the centre of gravity of the displaced fluids.Note that, for an object floating in a liquid, the buoyant force due to the displaced air is usually
negligibly small.

FE3: Equilibrium 36
Example 3.6: A heavy object supported in water by a string
Force exerted by string
Buoyant force
Weight
Water
String
Figure 3.18 A submerged object in equilibriumThe force exerted by the string adjusts to balance the weight and the buoyant force.
Here all the forces on the submerged object are shown.For equilibrium of this object:
force exerted by string = weight - buoyant force.We might call the weight of the block minus the buoyant force the "effective
gravitational force".This situation is demonstrated using a spring balance.If the buoyant force were greater than the weight, a force would have to be applied to hold
the object down. This happens, for example with a helium-filled balloon.Example 3.7: Floating object
Buoyant forceAir
WeightLiquid
Figure 3.19 A floating object in equilibriumThe displaced liquid adjusts so that the forces balance.
For equilibrium, taking components in the direction vertically down:weight - buoyant force = 0 .
The total torque will be zero if the buoyant force and the weight act along the same line.This means that the centres of gravity of the floating object and the displaced fluids must lie inthe same vertical line.
POST-LECTURE
3-11 MOMENT OF INERTIAThe physical quantity which describes the distribution of matter about the axis of rotation is themoment of inertia. Objects with their masses concentrated about the axis of rotation (or axle) havesmaller moments of inertia about that axis.
More precisely, if we divide the object up into small pieces each with mass Δm and at somedistance r from the axle, then the moment of inertia is
I = Σ Δm r 2
where the sum is taken over all the small pieces.

FE3: Equilibrium 37
Δm
r Axle
Figure 3.20 Defining the moment of inertia
For objects with a fixed axis of rotation, total torque about the axis equals moment of inertiaabout the axis times angular acceleration. This is the reason why the wheel with the metal axle in thelecture demonstration had the larger angular acceleration.
3-12 QUESTIONS AND PROBLEMS ON EQUILIBRIUMQ3.3 a) A tall block sitting on a table is being pulled.
F
Figure 3.21 Tipping an object
If the pull is applied near the top, the object will tip over instead of sliding along the table. Why?Hint: to get the block moving, the force F must be greater than the maximum frictional force acting at
the bottom on the block. F cannot be any smaller than this. Now consider torques. What point is theblock going to rotate about?
How could you pull the block along the table without tipping it?b) Pulling trees down with a tractor can be a dangerous occupation. Which of the methods shown
below is the less dangerous way to tie the rope to the tractor? Why?
Figure 3.22 Uprooting a tree. Which way is safer?
Equilibrium of pivoted objectsQ3 .4 Two children are balancing on a seesaw. Their weights are 200 N and 300 N . The smaller child is
1.80 m from the centre.Suppose that the weight of the seesaw is 500 N and the centre of gravity is directly above the pivot.Draw all the forces acting on the seesaw.
a) Calculate the magnitude of the force that the pivot exerts on the seesaw.b) How far from the centre is the larger child at equilibrium?
Q3.5 Explain why a beam balance gives the same value for the mass of an object on the Moon as on the Earth.
3-13 STABLE, UNSTABLE AND NEUTRAL EQUILIBRIUMWe sometimes distinguish between stable and unstable equilibrium. For example, consider a cone.

FE3: Equilibrium 38
NeutralStable Unstable
NeutralStable Unstable
Figure 3.23 Stable and unstable equilibrium
In both cases the cone is in equilibrium because the total force is zero and the total torque iszero. But the first case is stable, a slight displacement has no effect, while the second case isunstable, a slight displacement causes the cone to tip over. When the cone is lying on its side it isin neutral equilibrium.Q3.6 What forces are acting and where are they acting in each case? What torques are responsible for restoring
the cone to its original position or otherwise?Centre of GravityQ3.7 a) Does the centre of gravity always lie within an object? If not, give examples.
b) Suggest a way of locating the centre of gravity of a "lumpy" object (not a flat object).
3-14 FLUIDSPressureWhen a solid object is immersed in a fluid, the force exerted on the object by the fluid is distributedover the contact surface. For a complete description we need to look at the force acting on eachsmall part of the surface. We can define the average pressure on a flat surface to be the component,δFn, of the force perpendicular to the surface divided by the area, δA, of the surface. The limit ofthis quotient as we take smaller and smaller pieces of the contact surface (and hence also smaller andsmaller forces) is the pressure, P, at a point on the surface:
P = lim
δA→0
δFnδA
.
... (3.2)
Provided that the body and the fluid are not moving, the force on each small part of the contactsurface is perpendicular to the surface (see figure 3.12) so the interaction can be describedcompletely in terms of pressure. (On the other hand, if there is relative motion between fluid andsolid object, the force has components parallel to the surface, not described by the pressure.)
This idea of pressure can be used also to describe what goes on inside the fluid; just imaginethe fluid divided into two parts as in the argument about buoyancy. Wherever we draw the fluidboundary, we can define a pressure exerted by one part of the fluid on the other part. So we can saythat pressure exists within the fluid.
The following are important statements about pressure.• Pressure is a scalar quantity - it has no direction.• The pressure within a uniform stationary fluid is the same at all points in the same horizontalplane.• The SI unit of pressure is the pascal, symbol Pa; 1 Pa = 1 N.m-2 .

FE3: Equilibrium 39
DensityPressure variations within a fluid are affected by its density. The density, ρ, of a uniform substanceis defined as the quotient: mass ÷ volume:
ρ =mV . ... (3.3)
The barometer
h
S S'
Figure 3.24 A mercury barometerA tube, closed at one end, is filled with mercury and is then inverted over a container of
mercury as shown. If the tube is sufficiently long, the mercury falls from the top leaving anevacuated region there.
By considering the equilibrium of a part of the surface SS' of the mercury outside the tube, wecan show that the pressure in the mercury just under that surface is equal to the atmosphericpressure. So too is the pressure at the same level inside the tube.
We consider the equilibrium of a body consisting of the column of mercury in the tube whichis above the level SS'. The forces on this column of mercury are its weight, W, downward and theupward force, F, exerted by the mercury below the column. The magnitude of the upward forcemust be equal to atmospheric pressure multiplied by the cross-sectional area, A, of the tube:
F = PA.
The weight of the mercury column is equal to the product of its density, its volume and g.Since the volume is equal to the product of the column's height and cross-sectional area,
W = ρhAg .
These two forces, must have equal magnitudes, soP = ρgh . ...(3.4)
The density of mercury is 13.6 × 1 03 kg.m-3 and normal atmospheric pressure is1.01 × 1 05 Pa (101 kPa).Q3.8 a) Estimate the height of a column of mercury in a barometer.
b) The density of water is 1.00 × 103 kg.m-3. Estimate the height of the column of water in a waterbarometer.
3-15 QUESTIONS ON BUOYANT FORCESQ3.9 Density of air = 1.29 kg.m-3.
Density of helium = 0.18 kg.m-3.A balloon is filled with helium. Its volume is 1.00 m3. What downward force must be applied to stop
the balloon rising up into the sky?Q3.10 Estimate the buoyant force exerted on you by the atmosphere.Q3.11 An ice cube is floating in a glass of water. The water and the ice are at about 0°C.
Density of ice at 0°C = 917 kg.m-3.Density of water at 0°C = 1000 kg.m-3.
a) What fraction of the ice cube is submerged?
FE3: Equilibrium 40
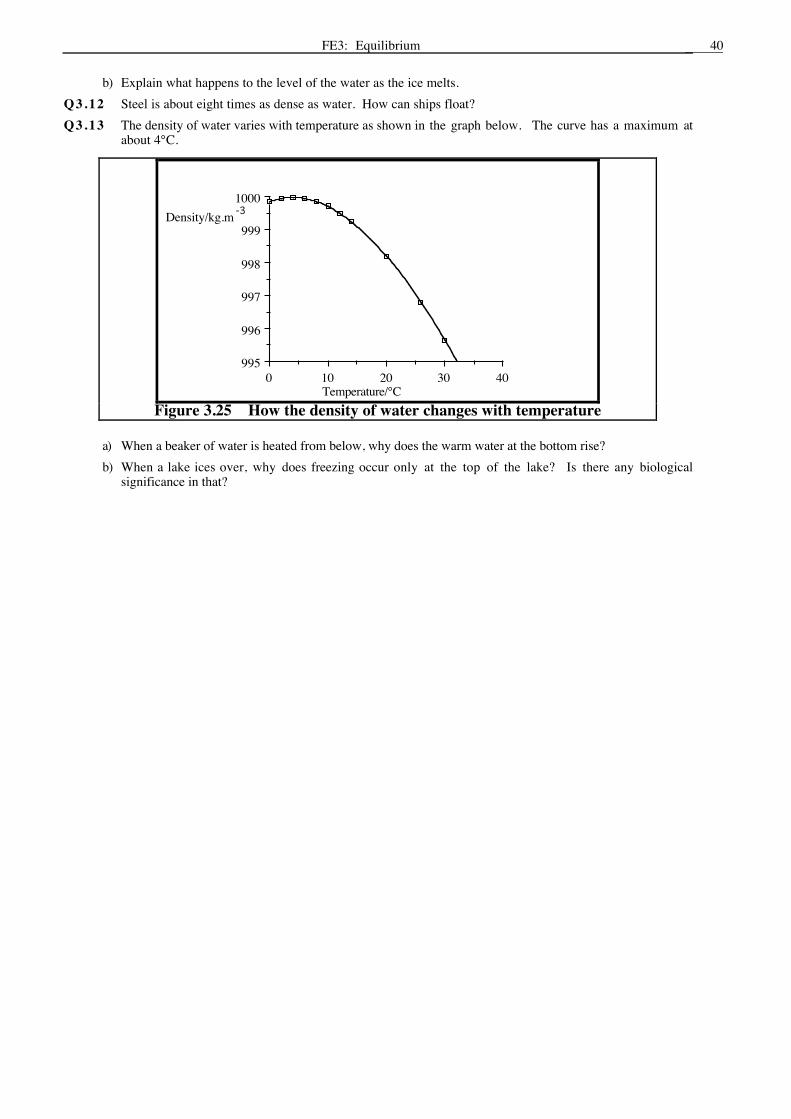
b) Explain what happens to the level of the water as the ice melts.Q3.12 Steel is about eight times as dense as water. How can ships float?Q3.13 The density of water varies with temperature as shown in the graph below. The curve has a maximum at
about 4°C.
0 10 20 30 40995
996
997
998
999
1000
Temperature/°C
Density/kg.m -3
Figure 3.25 How the density of water changes with temperature
a) When a beaker of water is heated from below, why does the warm water at the bottom rise?b) When a lake ices over, why does freezing occur only at the top of the lake? Is there any biological
significance in that?
Interlude 3: Masses 41
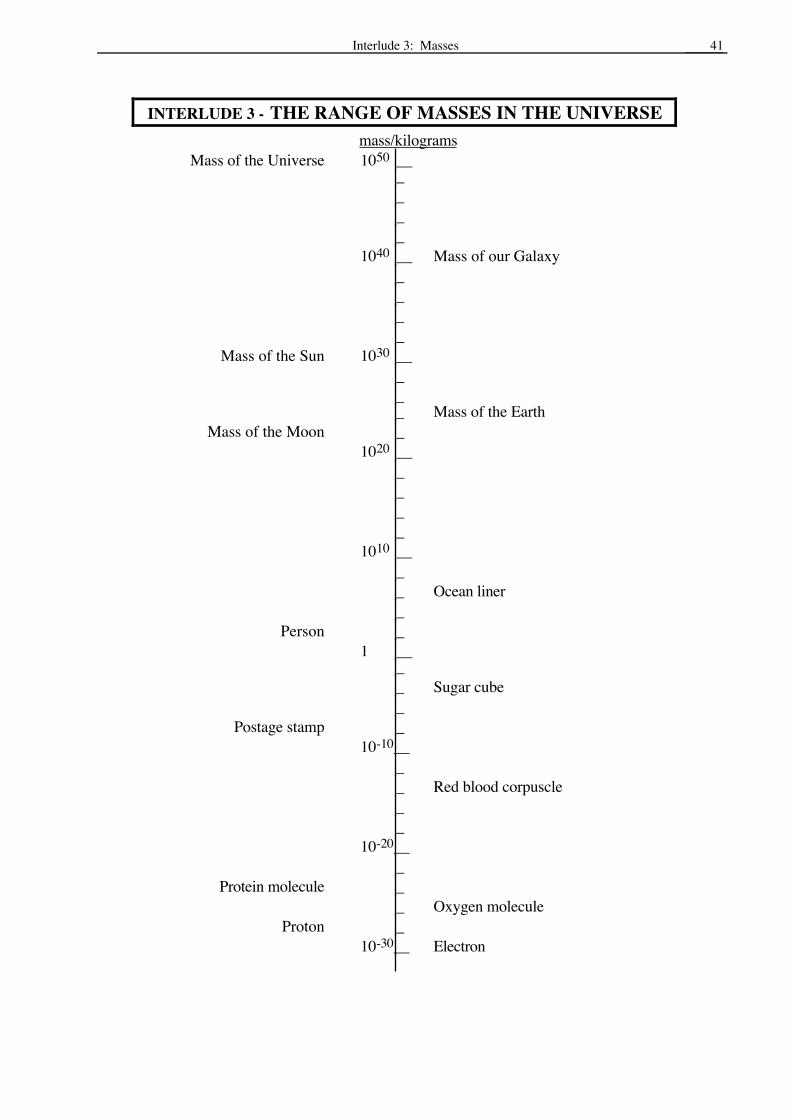
INTERLUDE 3 - THE RANGE OF MASSES IN THE UNIVERSEmass/kilograms
Mass of the Universe 1050 ___
_ _ _1040 __ Mass of our Galaxy _ _ _ _
Mass of the Sun 1030 __ _ _
_ Mass of the EarthMass of the Moon _
1020 __ _ _ _ _1010 __ _ _ Ocean liner _
Person _1 __
_ _ Sugar cube _
Postage stamp _10-10__ _ _ Red blood corpuscle _ _10-20__ _
Protein molecule _ _ Oxygen molecule
Proton _10-30__ Electron