2013 - cybertesis.uni.edu.pecybertesis.uni.edu.pe/bitstream/uni/3750/1/huaman_ga.pdf ·...
TRANSCRIPT

, UNIVERSIDAD NACIONAL DE INGENIERIA
FACULTAD DE CIENCIAS ,
ESCUELA PROFESIONAL DE FISICA
Tesis para optar el Título Profesional de: ,
LICENCIADO EN FISICA
Titulada: Movimiento de espiras planas
en campos magnéticos homogéneos.
Presentada por: Angiolo Miguel Huamán Gutiérrez
Asesor: , Edgard Vidalón Vidalón
Lima- Perú
2013

Dedicado con especial afecto a mi familia, a mis profesores y amigos de la Facultad de Ciencias,
y a mis alumnos, con quienes he aprendido tanto.
1

Agradecimientos
La realización de este trabajo no habría sido posible sin la paciente ayuda de mi profesor asesor Édgard Vidalón Vidalón, quien me apoyó permanentemente no sólo en cuanto al contenido teórico, sino también en la redacción y en el ordenamiento general de los temas. Además, toda la parte computacional y de diseño de este trabajo ha sido elaborada íntegramente usando Software Libre, por lo cual quisiera agradecer a toda la comunidad de desarrolladores que trabajan, de manera muchas veces desinteresada, creando herramientas de libre uso, sin las cuales la elaboración de esta tesis habría transitado por un camino más complicado.
2

Introducción
El estudio del movimiento de cargas en campos eléctricos y magnéticos es de fundamental importancia en diferentes áreas de la Ciencia y la Técnica: el movimiento de los electrones en los tubos de rayos catódicos, los selectores de velocidad, el espectrógrafo de masas, e incluso los aceleradores de partículas. Este estudio puede abordarse de dos formas: análisis del movimiento de cargas individuales (electrones, iones, etc) o movimiento de distribuciones de carga (espiras por ejemplo). Ambos estudios parten de las mismas leyes fundamentales (ley de fuerza de Lorentz), aunque revisten características peculiares. Por ejemplo, para la descripción del movimiento de una carga puntual se necesitan tres grados de libertad, que representan las tres coordenadas de la partícula vista desde un sistema de referencia. Por su parte, cuando se trata con distribuciones de corriente (restringiéndonos al caso de distribuciones localizadas de corriente), la descripción completa de la misma requiere más de tres grados de libertad, debido a que se necesita especificar también la orientación (y no sólo la posición) de la distribución para cada instante de tiempo. Por esta razón se usarán los tres ángulos de Euler para definir el estado mecánico del cuerpo.
Un ejemplo elemental de distribución de corriente es de las espiras. En este caso se trata claramente de una corriente distribuida a lo largo de una curva cerrada. En este trabajo estableceremos las principales características del movimiento de este tipo de distibuciones de corriente debido a su interacción con campos magnéticos uniformes solamente, obviando cualquier otros tipo de interacción, la gravitatoria por ejemplo. Centraremos nuestro trabajo en las espiras planas, y particularmente en dos tipos: espiras en forma de circunferencia (espira circular) y en forma de elipse (espira elíptica). Desarrollamos ambos casos con un objetivo comparativo; veremos que en la espira circular tenemos suficientes constantes de movimiento como para hacer posible una integración completa del sistema, en términos de funciones integrales (cuadraturas). Al pasar al caso de la espira elíptica notaremos la ausencia de una integral de movimiento (resultado de la pérdida de simetría circular), lo cual no permite una integración completa del sistema como fue el caso de la espira circular.
En ambos casos, tanto el circular como el elíptico, las ecuaciones de movimiento pueden ser obtenidas hasta de tres maneras. La primera es considerar las ecuaciones de Euler para el cuerpo rígido constituido por la espira, bajo la acción del torque de la fuerza magnética. Esto nos da ecuaciones para las componentes de la velocidad angular, las mismas que una vez resueltas dan lugar a expresiones para los ángulos de Euler y sus respectivas derivadas. El segundo planteamiento es usar las ecuaciones de Euler-Lagrange utilizando los ángulos de Euler como coordenadas generalizadas. Sin embargo, en este trabajo hemos usado el formalismo de Hamilton, fundamentalmente porque queremos estudiar algunas características del espacio de fases del sistema; particularmente queremos estudiar algunos signos de caos en la espira elíptica mediante la estimación de los exponentes de Lyapunov de la misma.
Una aplicación de esta tesis es analizar el movimiento de satélites artificiales, considerándolos como cuerpos rígidos. En particular podemos estudiar el problema de estabilizar la orientación del satélite respecto de los rayos solares. Esto es así porque un satélite
3

posee circuitos eléctricos internos que interactúan con el campo magnético de la tierra, comportándose como una espira (dipolo magnético). El campo magnético de la tierra puede considerarse, con buena aproximación, uniforme al menos dentro de los límites establecidos por las dimensiones del satélite.
4

, lndice general
l. Preliminares 1.1. Dinámica del Cuerpo Rígido .....
1.1.1. Cinemática del cuerpo rígido . 1.1.2. Matriz de Inercia ..... 1.1.3. Momento Angular 1.1.4. Ecuaciones de movimiento
1.2. Teoría de Hamilton . . . . . . . .
10 10 10 12 14 15 17
1.2.1. Función de Hamilton y ecuaciones canónicas 17 1.3. Torque y energía sobre una distribución de corriente en un campo magnético 18
1.3.1. Fuerza debida a un campo magnético . . . . . . . . . . . . . . . 18
2. Métodos numéricos para la resolución de ecuaciones diferenciales. 23 2.1. Método de Runge-Kutta-Fehlberg . . . . . . 23 2.2. Métodos multipasos . . . . . . . . . . . . . . 24
2.2.1. Métodos explícitos: Adams-Bashforth 26 2.2.2. Métodos implícitos: Adams-Moulton 27
2.3. Método predictor-corrector: Adams-Bashforth-Moulton 28
3. Movimiento de una espira circular en un campo magnético uniforme 29 3.1. Obtención de las ecuaciones de movimiento mediante las ecuaciones de Euler 29 3.2. Hamiltoniano de la espira circular y ecuaciones canónicas. 3.3. Ecuaciones canónicas adimensionales ................ . 3.4. 3.5. 3.6. 3.7. 3.8. 3.9.
Integración de las ecuaciones de movimiento. . . . . . . . . . . . . . Movimiento con velocidad angular inicial paralela al eje de simetría. Análisis cualitativo de los puntos de retorno . . . . Solución numérica de las ecuaciones de movimiento. Precesión regular en la espira circular Exponentes de Lyapunov . . . . . . . . . . . . . . .
4. Espira elíptica en un campo magnético uniforme 4.1. Momentos de inercia en una espira elíptica .. 4.2. Función de Hamilton ................ . 4.3. Ecuaciones canónicas de Hamilton . . . . . . . . . . 4.4. Soluciones numéricas en el movimiento de la espira elíptica ..
4.4.1. Caso 1: E« 1 y 1~1 > 1 4.4.2. Caso 2: E « 1 y 1~1 « 1 4.4.3. Caso 3: E ;S 1 y 1~1 > 1
5
32 34 35 37 39 40 45 55
59 60 62 65 66 67 70 71
4.4.4. Caso 4: E ;S 1 y 1~1 « 1 ..... 4.5. Indicadores de caos en la espira elíptica.
5. Conclusiones 5.1. Espira Circular 5.2. Espira elíptica .
Appendices
A. Programas en Python. A.1. Espira circular . A.2. Espira Elíptica . . .
B. Oscilaciones unidimensionales
6
75 79
83 83 84
86
87 87 97
106

, lndice de figuras
1.1. Descripción cinemática del cuerpo rígido. . . . . . . . . . . . . . . . . . . . 11 1.2. Para determinar la fuerza y el torque sobre una distribución acotada de
corriente, debemos partir del hecho de que el campo magnético externo varía poco dentro de la región R que contiene las corrientes. 19
2.1. Esquema general de un método multipaso. 25
3.1. Sistemas de referencia usados. . . . . . . . 30 3.2. Gráficas de U(O) = (p,p- P1/J cos0)2/I2 sen20- 2mB cosO/! para tres di
ferentes casos. Es claro que sólo en el caso (e) se obtiene un movimiento oscilatorio en (}. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3. Movimiento del eje de la espira restringido a una máximo y mínimo valor de O. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.4. Forma general de la función f. . . . . . . . . . . . . . . . . . . . . . . . . . 40 3.5. Dependencia temporal de Jo y (} en la espira circular con parámetros a =
1, 2 y ¡3 = 2, O. Se observa el carácter periódico de las soluciones. Para diferentes valores de a y ¡3 se obtienen soluciones similares. . . . . . . . . . 42
3.6. Diagrama de fases típico para la espira circular. La forma cerrada del mismo es característica de los movimientos periódicos (en este caso la periodicidad es en 0). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3. 7. Dependencia temporal de </> en la espira circular para diferentes parámetros. Como se discutión en la sección 3.6, se presentan tres casos: (a) O < cos (}M < aj ¡3, lo que da lugar a máximos y mínimos, (b) a > ¡3, en este caso </> presenta una monotonía estricta (en este caso ~ > O), y en (e) se tiene que a j ¡3 = cos (}M, lo que hace que </> presente puntos de inflexión. 44
3.8. Movimiento del eje de la espira. Se muestra también la dirección del campo magnético homogéneo con fines de referencia. Esta figura se relacion con lo obtenido en la gráfica 3.6. En la figura superior se observa que ~se anula en los puntos donde se presentan los rizos. . . . . . . . . . . . . . . . . . . 46
3.9. Movimiento del eje de la espira. . . . . . . . . . . . . . . . . . . . . . . . . 47 3.10. Variables canónicas para la espira circular en el caso estacionario. Se ob-
serva que Jo y (} se mantienen constantes en tanto que <P y '1/J varía en forma lineal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.11. Forma de f para la precesión regular. . . . . . . . . . . . . . . . . . . . . . 49 3.12. Dependencia de las variables canónicas en función del tiempo para el caso
estacionario. Como se observó en la figura 3.10, la característica de este tipo de movimiento es que Jo y (} son constantes, mientras que <P y '1/J son funciones lineales del tiempo. . . . . . . . . . . . . . . . . . . . . . . . . . 51
7

3.13. Movimiento del eje de simetría de la espira circular durante el movimiento estacionario. Como es de suponerse, al mantenerse constante la variable e, el eje de la espira se mueve sobre una superficie cónica. . . . . . . . . . . . 52
3.14. Análisis de la estabilidad de la solución estacionaria en la espira circular. . 53 3.15. Dependencia de Jo y e en función del tiempo. Sólo la solución para e0 =
50, oa es estacionaria (con </Jo= '1/Jo =O y (3 = 2, 0). En los demás casos se han mantenido todas las condiciones iniciales (y el valor de (3) excepto en e0 , cuyo valor se muestra en cada caso. Puede observarse que las soluciones obtenidas se desvían ligeramente de la solución estacionaria. . . . . . . . . 54
3.16. Diagrama de fases e-Jo. En todos los casos se tiene que Jo( O) =O, a= 3, 37 y (3 = 2. La solución con e0 = 50° es estacionaria (su diagrama de fases se reduce a un punto). Las demás soluciones se diferencia de la primera en pequeñas variaciones de la condición inicial en e. Como era de esperarse, estas soluciones se separan ligeramente de la estacionaria. . . . . . . . . . . 55
3.17. Separación de las soluciones en el espacio de fases. . . . . . . . . . . . . . . 56 3.18. Análisis del caos en la espira circular. En la gráfica lnjóej observamos que
la tendencia creciente se asemeja mucho a una función logarítmica, lo cual es típico de los movimientos no caóticos. Esto se corrobora al observar la gráfica de aN. Se observa que tiende a un límite muy cercano a cero, incluso ligeramente debajo de él. . . . . 58
4.1. Parámetros de la elipse (a> b). 60 4.2. Parámetros de la elipse (a> b). 61 4.3. Gráficas de Jo, () y J..¡_, en el caso E = O, 001 y l.ó.l = 14,06 (caso 1). Jo y
e varían apreciablemente mientras que J..¡_, se mantiene casi constante. En realidad, se mostrará que J..¡_, también tiene un carácter oscilatorio pero de período mucho mayor al de() y J0.. . • . • • . • . . . . • . . • • . . . . • • 68
4.4. f..p para E = O, 001 y l.ó.l = 14, 06. . . . . . . . . . . . . . . . . . . . . . . . 69 4.5. Diagrama de fases e- Jo para el caso 1, con E= O, 001 y l.ó.l = 14,06 (caso
1). La desviación del caso circular (curva cerrada) es apenas visible. . . . . 70 4.6. Gráficas de Jo, e y J..¡_, en el caso E= O, 001 y l.ó.l =O, 015 (caso 2). Lo mismo
que en el caso 1, J..¡_, es fundamentalmente constante durante la evolución de Jo y e. No obstante, una observación más minuciosa de J..¡_, mostraría que presenta también un carácter periódico (con una pequeñísima amplitud). . 71
4.7. Diagrama de fases e- Jo para el caso 2 con l.ó.l =o, 015 y E= o, 001. Nótese la diferencia en la forma en comparación con la figura 4.5. En ambos casos el movimiento es cuasiperiódico. . . . . . . . . . . . . . . . . . . . . . . . . 72
4.8. Se muestran las gráficas de e y Jo para dos valores de E (caso 3). Para valores intermedios de E puede mostrarse que la modulación se acentúa. . . 7 4
4.9. Diagramas de fase en Jo y e para diferentes valores de E y l.ó.l = 6,43 (caso 3). En este caso la gráfica está contenida entre dos curvas cerradas (movimiento cuasiperódico). . . . . . . . . . . . . . . . . 75
4.10. Trayectorias del eje de la espira para l.ó.l = 6, 4 (caso 3). . . . . . . . . . . 76
8

4.11. Gráficas de Jo, e y J"l/1 en el caso E = O, 5 y 1~1 = O, 010 (caso 4). A diferencia de los casos analizados anteriormente, donde el período de J"l/1 era considerablemente mayor a los de Jo y e, en este caso los tres períodos son del mismo orden de magnitud. Esto hace que la modulación que surge en la solución e se haga más irregular, en comparación con el caso 3. . . . . 77
4.12. Gráfica de e para E= O, 32 y 1~1 =o, 011 (caso 4). Aquí puede observarse acentuadas las irregularidades que se mencionaron al analizar la gráfica de e en la figura 4.11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.13. Gráficas de '1/J para el caso 4. A diferencia de los casos anteriores (donde '1/J exhibía un carácter monótono), aquí se nota una cierta periodicidad en en la solución para '1/J. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.14. Diagrama de fases (}- .fo para el caso 4. En los movimientos periódicos se tenía que estos diagramas eran curvas cerradas en tanto que en los cuasiperiódicos la figura se hallaba acotada por dos curvas cerradas cercanas (en el caso 3 por ejemplo). Aquí se observa que estos casos no se presentan por lo que el movimiento tiene otra naturaleza. . . . . . . . . . . . . . . . . 80
4.15. Gráfica lnlb"el en función del tiempo. Pese a las irregularidades, el crecimiento de esta cantidad es muy limitado (similarmente a lo obtenido para la espira circular). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.16. Estimación de los exponentes de Lyapunov en la espira elíptica (E = O, 3 y 1~1 = 6,43) .................................... 82
9

Capítulo 1
Preliminares
Aquí introducimos las principales definiciones y resultados de la Mecánica Clásica que serán usadas a lo largo de este trabajo. Se exponen en forma resumida sólo los aspectos físicos, dejando los métodos numéricos empleados para un capítulo a parte. Mostramos los fundamentos de la descripción cinemática de un cuerpo rígido, así como las ecuaciones dinámicas que determinan el movimiento del mismo. A continuación describimos la formulación de Hamilton, que será el método definitivo que usaremos en la resolución del movimiento de las espiras circular y elíptica. Concluimos con algunas anotaciones acerca de la fuerza, torque y energía sobre una distribución de corriente debidos a un campo magnético externo. El lector interesado podrá encontrá más información respecto de estos temas en los textos indicados en la bibliografía.
1.1. Dinámica del Cuerpo Rígido
1.1.1. Cinemática del cuerpo rígido
Para la descripción del movimiento de un cuerpo rígido se utilizarán dos sistemas de ejes: uno fijo al cuerpo rígido, cuyos vectores unitarios usualmente denotaremos como { e 1 , e 2 , e 3 }; y otro inercial y (en general) exterior al cuerpo rígido, cuyos vectores unitarios denotaremos en la forma usual i, j, k. Existe una cierta libertad al momento de elegir el origen del sistema de coordenadas (al que llamaremos O) fijo al cuerpo rígido, pero para los objetivos de este trabajo resultará conveniente tomarlo en el centro de masa del cuerpo, como se verá más adelante. El origen del sistema de referencia inercial será representado por Oo.
La posición del cuerpo rígido (respecto del sistema inercial) queda determinada si conocemos la posición del centro O, así como la orientación del sistema de ejes fijos al cuerpo, en cada instante de tiempo, con respecto del sistema de ejes inerciales. Consideremos un desplazamiento infinitesimal de un punto p dentro del sólido. Desde el punto de vista del sistema de referencia inercial, este movimiento lleva los puntos O y p hasta una nueva posición O' y p', infinitesimalmente próxima de la posición inicial. La posición final p' puede ser alcanzada mediante dos movimientos sucesivos del sólido: primero un desplazamiento infinitesimal puramente traslacional que lleve el punto O hasta su nueva posición O', seguido de una rotación infinitesimal en torno al punto O' y a lo largo de cierto· eje que pase a su vez por O' (esto es siempre posible en virtud del teorema de Euler). De esta
10

forma, el desplazamiento infinitesimal dR del punto p puede ser escrito como [6]:
dR = dRo + dcf> x r (1.1.1)
El primer término en el lado derecho de la ecuación anterior da cuenta del movimiento de traslación, en tanto que el segundo corresponde a una rotación de un ángulo d<P alrededor del eje que contiene a dcf>. Si dividimos la ecuación anterior entre dt y definimos las velocidades:
dR v=-
dt dRo
U=--dt
de/> W=-
dt (1.1.2)
obtenemos las relación siguiente:
v=u+wxr (1.1.3)
X
Figura 1.1: Descripción cinemática del cuerpo rígido.
El vector u nos da la velocidad del punto O fijo al cuerpo, y se le suele llamar velocidad de traslación. El vector w se llama velocidad angular del sólido, y su dirección coincide con la del vector de/> en el límite cuando dt --+ O (eje instantáneo de rotación). Adicionalmente notemos que de la figura 1.1 podemos escribir:
R=Ro+r
derivando esta expresión y tendiendo en cuenta las relaciones (1.1.2) y (1.1.3) obtenemos el resultado siguiente:
r=wxr (1.1.4)
es decir, la velocidad de un punto del cuerpo rígido, visto desde el sistema de ejes fijos al cuerpo, es perpendicular a su vector posición. Como nota final, obsérvese que en todo lo anterior no se ha hecho ninguna suposición acerca del punto O tomado como origen del sistema de ejes fijos al cuerpo. Existen situaciones en la que será conveniente tomar este punto como el centro de masa del sólido, aunque hay casos en los que es más adecuado tomar un punto diferente. En este trabajo nos inclinaremos por la primera opción, como se verá más adelante.
11

1.1.2. Matriz de Inercia
Ya hemos visto que la velocidad de un punto dentro de un cuerpo rígido puede expresarse de acuerdo a la ecuación (1.1.3):
v=u+wxr
esta relación nos permite determinar la energía cinética Ee de este cuerpo. Para ello notemos que: 1! 2 Ee = 2 dmv (1.1.5)
donde la integral se extiende a todos los puntos del cuerpo rígido. De la expresión para v tenemos:
v2 = u2 + 2 u · w x r + ( w x r) · ( w x r)
que reemplazados en la ecuación (1.1.5) nos da tres términos para la energía cinética [7]:
Etras = ~ J dmu2 e 2 (1.1.6)
E~ = J dm u· w x r (1.1.7)
E~ot = ~ J dm (w x r) · (w x r) (1.1.8)
la energía cinética de traslación (E~ras) puede reducirse teniendo en cuenta que la rapidez u puede salir del signo de la integral:
Etras = u2 ! dm e 2
= ~Mu2 2
(1.1.9)
siendo M la masa de cuerpo. La componente mixta E~ también puede reducirse de similar manera:
Em = ~ 1 dm u · w x r = ~ 1 dm u x w · r e 2 2
=~u x w· 1 dmr
= 1\1u x w ·Re (1.1.10)
donde Re es la posición del centro de masa del cuerpo en el sistema de ejes fijos al cuerpo:
La componente mixta de la energía cinética puede eliminarse tomando el centro O como el centro de masa del cuerpo (en este caso Re = O), o escogiendo un sistema de referencia en el cual u sea a su vez cero; en tal caso también se anularía la componente de traslación de la energía cinética. En este trabajo usaremos el centro de masa como origen del sistema de ejes fijos al cuerpo, por ello en adelante nos ocuparemos solamente de la parte traslacional
12

E~ras y rotacional E~ot (en realidad, veremos que en nuestro caso también es posible eliminar la parte traslacional). Para ello tengamos en cuenta las siguientes identidades vectoriales:
A·BxC=AxB·C A x (B x C) = B (C ·A)- C (B ·A)
usándolas en la expresión para E~ot se obtiene:
Los vectores w y r pueden escribirse ya sea en la base del sistema de referencia inercial o en la base del sistema de ejes fijos al cuerpo. En este último caso tenemos:
3
r = Z:::riei i=l
3
w = Z:::wiei i=l
Usando estas expresiones en E~ot y escribiendo a su vez w2 como L:ii ói3· wiwi tenemos que:
3.
Erot = ~ """' J.. W·W. e 2 ~ 23 t J (1.1.11) i,j=l
donde las cantidades Iii están dadas por:
J.· = J dm (r 28· · - r-r ·) 2] tJ t 1 (1.1.12)
El valor de las cantidades Jij depende naturalmente de la elección del sistema de ejes fijos al cuerpo rígido. Puede probarse que los Iij se transforman como un tensor de segundo orden, al que se denomina tensor de inercia [6]. Mediante una transformación adecuada de este sistema de ejes podemos escribir el tensor de inercia en forma diagonal:
[
l¡ o o ] Iii = O h O
o o h
Las cantidades ]¡, 12 y h se denominan momentos principales de inercia, en tanto que los ejes en los que la matriz de inercia adquiere la forma diagonal. anterior se llaman ejes principales de inercia. En un sistema de ejes principales de inercia, la energía cinética rotacional del cuerpo rígido, dada por la ecuación (1.1.11), se escribe como:
3
Erot = ~ """' ¡. w~ e 2 ~ t 2 (1.1.13) i=l
y tomando el centro de masa como el punto O obtenemos:
(1.1.14)
13

La función de Lagrange del sólido se obtiene restando a la expresión anterior la respectiva energía potencial (U) [6]:
3 1 2 1 ¿ 2 L=-Mu+- J.w.-U 2 2 ' '
(1.1.15) i=l
donde es obvio que las componentes wi dependen de las coordenadas y velocidades generalizadas. La energía potencial U dependerá, en principio, de los seis grados de libertad del sólido. Sin embargo, veremos que debido a la naturaleza de las interacciones estudiadas en este trabajo, U sólo dependerá de las coordenadas que describen la orientación del sólido (y no de la posición de su centro de masa).
1.1.3. Momento Angular
El momento angular Lo de un cuerpo rígido puede obtenerse como la sumatoria de los momentos angulares de las partes infinitesimales del cuerpo. Naturalmente, al hablar de momento angular debemos indicar el punto respecto del cual se calcula este momento. Ya que hemos escogido el centro de masa como origen del sistema de ejes fijos al cuerpo rígido, calculemos el momento angular respecto de este mismo punto:
Lo= 1 dmr x v
= 1 dm r x (u + w x r)
= (1 dmr) x u+ 1 dmr x (w x r) (1.1.16)
El primer término en el segundo miembro de la ecuación (1.1.16) resulta M Re x u, igual a cero en virtud de nuestra elección del punto O. El segundo término puede escribirse usando las componentes del tensor de inercia:
1 dmr x (w x r) = 1 dm[r2w -r(r·w)]
= 1 dm [r2 wi ei- rirj w1 ei]
= 1 dm [r2 8ij - rir1] w1 ei
recordando la ecuación (1.1.12) obtenemos:
3 3 1 dmr x (w x r) = ¿ei L:w1 Iij i=l j=l
(1.1.17)
De esta forma, las componentes del momento angular (en la base de ejes fijos al cuerpo) son:
3
Li = LiijWj j=l
14

En particular, en un sistema de ejes principales de inercia se tiene que la suma anterior se reduce a:
o en forma vectorial: 3
L = Lliwiei i=l
Volveremos a esta expresión más adelante.
1.1.4. Ecuaciones de movimiento
(1.1.18)
Las ecuaciones de movimiento de un sólido rígido quedarán determinadas si se conocen las fuerzas que actúan sobre él. Para simplificar los razonamientos consideremos el cuerpo rígido como una colección discreta de partículas de masas m k (donde el índice k toma valores desde 1 hasta el número de partículas que conforman el cuerpo). El paso al caso continuo se hará haciendo la sustitución:
Definamos el torque de una fuerza F, respecto de O, sobre una partícula de acuerdo a la expresión siguiente:
To = r x F (1.1.19)
De acuerdo a esto, el torque sobre la k-ésima partícula puede escribirse como:
Tok = rk x Fk
= rk X Fint + rk X F~xt (1.1.20)
donde F~nt y F%xt representan la fuerza resultante interna y externa sobre la k-ésima partícula respectivamente. Para esta partícula podemos escribir la segunda ley de Newton como:
(1.1.21)
siendo vk la velocidad de la partícula medida desde el sistema de referencia inercial. Si escogemos el punto O como el centro de masa del cuerpo, el momento angular del mismo se reduce a:
Lo= Lmkrk x (w x rk) k
(1.1.22)
donde la suma se extiende a todas las partículas del cuerpo. Derivando la expresión anterior respecto del tiempo:
(1.1.23)
El término¿ mk rk X (w X rk) se anula en virtud de rk = w X rk (ecuación (1.1.4)). Para el otro término recordemos que:
15

si asumimos que el centro de masa se mueve con rapidez uniforme, se tendrá que:
(1.1.24)
Si reemplazamos la ecuación (1.1.24) en (1.1.23) y usamos a su vez (1.1.20) se obtiene lo siguiente:
Lo = L rk X (F%xt + F~nt) k
Debido a la naturaleza central de las fuerzas internas entre las partículas, la segunda sumatoria en la expresión anterior se anula. La expresión restante es el torque resultante debido sólo a las fuerzas externas al cuerpo. Llamando a este torque resultante T 0
obtenemos: Lo = To (1.1.25)
La ecuación (1.1.25) describe la dinámica rotacional del sólido rígido. Es importante señalar que esta ecuación no es del todo general, ya que se ha obtenido tomando el centro de masa como punto O y asumiendo que éste se mueve con velocidad constante (ü. = 0). En un sistema de ejes principales de inercia mutuamente perpendiculares esta ecuación puede ser escrita en forma de componentes. De la ecuación (1.1.18), la derivada del momento angular Lo es:
3 3
Lo = L Iiwi ei + L Iiwi w x ei (1.1.26) i=l i=l
en tanto que el torque T 0 se escribe como:
To = L7iei (1.1.27)
Reemplazando (1.1.26) y (1.1.27) en la ecuación (1.1.25) y multiplicando escalarmente por ek obtenemos:
3
7k = hwk + L Iiwi ek · (w x ei) k= 1, 2, 3 (1.1.28) í=l
Desarrollando las sumatorias en el último término de la ecuación anterior se llega al siguiente sistema de tres ecuaciones diferenciales [6]:
7¡ = ]¡W¡ - W2W3 (h - h) 72 = hw2 - W3W1 (h - J¡)
73 = hw3- W¡W2 (]¡- J2)
(1.1.29a)
(1.1.29b)
(1.1.29c)
Las ecuaciones anteriores se conocen como Ecuaciones de Euler del cuerpo rígido, y contienen en sí toda la dinámica de rotación del sólido, en tanto se conozcan expresiones para las componentes del torque r 0 .
Falta obtener las ecuaciones del movimiento traslacional. Las ecuaciones para las coordenadas del centro de masa del cuerpo quedan determinadas por la segunda ley de Newton:
M Ro= Fext
Hay que señalar que es posible tener Fext = O pero T 0 /::- O. En este caso el centro de masa del cuerpo se mueve con movimiento uniforme y puede ser usado como origen del sistema de coordenadas inerciales. Cuando estas condiciones son satisfechas se dice que el cuerpo está sometido a un par de fuerzas.
16

1.2. Teoría de Hamilton
1.2.1. Función de Hamilton y ecuaciones canónicas
En el formalismo de Lagrange nuestras variables independientes son las qk y qk ( coordenadas y velocidades generalizadas respectivamente). Esto daba a lugar a un conjunto de s (ses el número de grados de libertad del sistema) ecuaciones diferenciales de segundo orden en el tiempo (ecuaciones de Euler-Lagrange). Ésta no es la única descripción posible para un sistema mecánico. Veremos que es posible transformar las s ecuaciones de Euler-Lagrange en un conjunto de 2s ecuaciones de primer orden. Para esto definamos los momentos generalizados p; según:
aL Pi= 8qi (1.2.1)
Los momentos Pi son, por definición, funciones de q y q. Despejando las velocidades generalizadas en función de q y p tenemos ahora que el sistema mecánico puede ser descrito en términos de estas dos nuevas variables. Pasemos a determinar las ecuaciones dinámicas en estas variables.
Consideremos el caso en el que la función de Lagrange no depende explícitamente del tiempo. Hallemos la diferencial de esta función evaluada en las trayectorias físicas (es decir, en aquellas que satisfacen las ecuaciones de Euler-Lagrange):
(1.2.2)
recordando la definición de los momentos generalizados y que las trayectorias qi ( t) satisfacen las ecuaciones de Euler-Lagrange podemos escribir la ecuación anterior en la forma siguiente (omitimos por simplicidad los límites de sumación):
(1.2.3)
Por otra parte, el segundo término en el lado derecho de la ecuación (1.2.3) puede escribirse en la forma:
(1.2.4)
usando este resultado en (1.2.3) y acomodando términos se obtiene:
(1.2.5)
La cantidad que se encuentra bajo el signo de la diferencial representa, en la mayoría de los casos, la energía del sistema en consideración, y se le suele denominar función de Hamilton H:
(1.2.6)
17

De la ecuación 1.2.5 vemos que la función de Hamilton debe ser considerada como una función de las coordenadas y momentos generalizados. Entonces:
de lo cual se deducen las ecuaciones [6]:
. oH qi=~,
upi
. oH Pi=-
oqi
(1.2.7)
(1.2.8)
Las ecuaciones anteriores constituyen un conjunto de 2s ecuaciones de primer orden en el tiempo, y suelen llamarse ecuaciones canónicas de Hamilton.
1.3. Torque y energía sobre una distribución de corriente en un campo magnético
1.3.1. Fuerza debida a un campo magnético
Consideremos una distribución de corriente localizada (es decir, limitada dentro de una cierta región finita) en una región R sometida a un campo magnético externo estacionario B, que varía poco en la extensión de R. Si escogemos un origen de coordenadas r = O dentro de R podemos hacer una expansión de Taylor en cada componente del campo. Considerando sólo los términos hasta primer orden tenemos:
donde Ki(O) = (V Bi)r=O· La expresión anterior puede escribirse en forma simbólica:
Y en forma vectorial: B(r) = B(O) + (r · V)B(O) (1.3.1)
Hay que hacer una aclaración respecto de la ecuación anterior. En el segundo término del lado derecho, el operador \7 actúa de la siguiente manera: primero se obtienen las derivadas de B, respecto de variables independientes de la variable r (variable de integración), y luego de evalúa en cero. Visto así, el operador \7 en (1.3.1) sólo actúan sobre B. Esto también puede interpretarse en el sentido siguiente: el campo B depende de la variable R, independiente de r, por lo tanto la gradiente en (1.3.1) sería respecto de esta variable (\7 = ojoR). La fuerza sobre la distribución de corriente se obtiene de la ecuación de fuerza de Lorentz aplicada a cada elemento infinitesimal de corriente y sumando sobre todo el volumen R:
F = L dx3 J(r) x B(r) (1.3.2)
Usando (1.3.1) y acomodando algunos factores se obtiene:
F = [ L dx3 J(r)] x B(O) + L dx3 J(r) x (r · V)B(O) (1.3.3)
18

La primera integral en la ecuación anterior se anula debido a que consideramos corrientes estacionarias, es decir \7 · J ( r) = O. En efecto, de la identidad vectorial (en este caso \7 actúa sobre las variables de f y F):
\7 · (f F) = f \7 · F + \7 f · F (1.3.4)
haciendo f = xi (i-ésima componente de r) y F = J obtenemos:
z
Figura 1.2: Para determinar la fuerza y el torque sobre una distribución acotada de corriente, debemos partir del hecho de que el campo magnético externo varía poco dentro de la región R que contiene las corrientes.
(1.3.5)
(en esta ecuación se ha usado \7 · J = O). Integrando esta expresión en R y usando el teorema de la divergencia en el primer miembro se obtiene:
ya que trabajamos con corrientes localizadas, la integral de superficie se anula (recordar que en este caso la densidad de corriente en la superficie es tangente al vector normal), resultando en que la integral de cada componente de la densidad de corriente se anula también. Desarrollemos el término restante en (1.3.3) teniendo en cuenta que el operador V allí presente sólo actúa sobre las coordenadas R que describen al campo magnético. Usemos la identidad:
V(r · B) = (r · V)B + (B · V)r + r x (V x B) + B x (V x r)
Ya que V= 8j8R y sólo B depende de R podemos escribir:
V(r · B) = (r · V)B
la expresión para F se escribe entonces como
F = { dx3 J ( r) x V (r · B) Jn
19
(1.3.6)
(1.3.7)
(1.3.8)

(donde hemos omitido por simplicidad el subíndice (O) en el campo B). Además, haciendo uso de la identidad vectorial:
V X (.f F) = V f X F + f V X F (1.3.9)
Haciendo f = r ·By F = J(r), y considerando que V= 8j8R se obtiene:
V x ((r · B) F) = V(r · B) x J (1.3.10)
Reemplazando en (1.3.8) y sacando el operador \7 del signo integral:
F = -V x l dx3 J ( r · B) (1.3.11)
Busquemos introducir en la ecuación (1.3.11) el momento magnético. Para esto notemos que se cumple:
B x (r x J) = r (B · J)- J (B · r)
Si integramos ambos lados en todo R se obtiene:
(1.3.12)
Para desarrollar el primer término en el lado derecho de la expresión anterior calculemos, por ejemplo, la primera componente:
l dx3 X (B · J) = l dx3
X (Bxlx + Byly + Bzlz)
= Bx i dx3
X lx + By i dx3 X ly + Bz i dx3
X lz (1.3.13)
donde se observa que la integrales son independiente de R. Podemos dar otra forma a la integral anterior usando la identidad (1.3.4) con f = XiXj, F = J(r) y V = ajar. En vista de que V· J(r) =O esta identidad resulta en:
Si integramos en R y aplicamos el teorema de la divergencia en la primera integral vemos que ésta se anula debido a que la distribución de corriente es localizada. Se obtiene entonces: i dx3
Xj Ji=- i dx3 Xi Ji (1.3.14)
Este resultado puede reemplazarse en (1.3.13) y resulta en lo siguiente:
i dx3 X (B · J) = - Bx i dx3
X lx - By i dx3
y lx - Bz i dx3 Z lx
= - i dx3 lx (r · B) (1.3.15)
El desarrollo para las demás componentes es completamente análogo. Se obtiene final-mente:
(1.3.16)
20

Si reemplazamos este resultando en (1.3.12) y realizamos pequeños ajuste obtenemos:
[ ~ l dx3
r x J J x B = L dx3 J (B . r) (1.3.17)
La expresión entre corchetes es justamente el momento dipolar m de la distribución:
m=~ L dx3
r x J (1.3.18)
(se observa que m es independiente de R). Con esta definición y las ecuaciones (1.3.17) y (1.3.11) obtenemos la expresión para F:
F=Vx[Bxm)
Podemos escribir la expresión anterior de una manera distinta si tenemos en consideración las siguientes dos identidades vectoriales:
V x (F x G) = F V· G- G V· F + (G · V)F- (F · V)G V(F. G) =(F. V)G + (G. V)F + F X (V X G) + G X (V X F)
Usando ambas identidades con F = B(R), G =m y V= ajaR obtenemos:
V x (B x m) = (m· V)B
V(B ·m)= (m· V)B
De esta manera la expresión para la fuerza resulta ser [14):
F = V(m·B)
(1.3.19a)
·(1.3.19b)
(1.3.20a)
(1.3.20b)
(1.3.21)
En esta expresión el campo magnético se evalúa en R = O luego de la derivación. Se observa que la fuerza magnética (en primera aproximación) sobre una distribución de corriente es proporcional a su momento magnético dipolar m.
Busquemos una expresión para el torque sobre la distribución de corriente. El torque diferencial sobre un elemento de corriente dx3 J respecto de O es:
Considerando sólo la contribución de orden cero de (1.3.1) e integrando obtenemos:
T = l dx3 r X [J X B ( 0)) (1.3.22)
Desarrollando el triple producto vectorial:
T = l dx3 J (r · B(O))- B(O) l dx3 (r · J) (1.3.23)
La segunda integral en la ecuación anterior se anula. En efecto, de la ecuación (1.3.14) con i = j se tiene que:
21

En la expresión restante podemos usar el resultado (1.3.17) junto con la definición de m. De esta forma se obtiene:
-r =m x B(O) (1.3.24)
Esta expresión es sólo aproximada, pero se vuelve exacta en el caso de campos magnéticos uniformes. La energía magnética de interacción puede deducirse de la ecuación (1.3.21) asumiendo que la fuerza deriva de un potencial:
F=-VU
de lo cual se obtiene [14]: U= -m·B (1.3.25)
Nótese que en la deducción de este resultado se ha tomando en cuenta sólo la fuerza ejercida por un campo magnético exterior, de modo que no corresponde todavía a la energía magnética total del sistema. Para completar esto habría que sumar a la expresión anterior la energía necesaria para formar la distribución de carga y para mantenerla estacionaria. Esta energía no depende de las variables dinámicas y por ello no afecta las ecuaciones de movimiento.
22

Capítulo 2
Métodos numéricos para la resolución de ecuaciones diferenciales.
En el presente capítulo se dará una breve teoría acerca de los métodos numéricos para ecuaciones diferenciales ordinarias que serán usados en el presente trabajo.
Las ecuaciones dinámicas del cuerpo rígido son, en general, no lineales, lo que hace que sea difícil integrar estas ecuaciones en forma analítica, aunque sea en términos de cuadraturas. Cuando los métodos análiticos fallan es necesario recurrir a métodos numéricos, los cuales nos darán las soluciones buscadas, una vez que se establezcan las condiciones iniciales. De entre los métodos numéricos más usados se encuentran el método de Runge-Kutta de cuarto orden, y el método de Adams-Bashforth-Moulton (método corrector-predictor), que será el método que usaremos en este trabajo.
La diferencia entre los métodos de Runge-Kutta y Adams-Bashforth-Moulton es que en el primero sólo se utiliza un valor de la función incógnita (en un instante dado), para determinar el valor de la misma un intervalo posterior. Esto hace que el método de Runge-Kutta se encuentre entre los métodos llamada de un solo paso. Por su parte, el método de Adams-Bashforth-Moulton utiliza más de un valor de la incóginta (en diferentes instantes), para hallar el valor en un instante posterior. Por este motivo este método es denominado multipaso.
Aquí exponemos los conceptos fundamentales acerca de estos dos métodos, aunque en el caso del método de Runge-Kutta presentaremos una versión modificada que nos permitirá una mejor estimación del error de truncamiento, denominada método de RungeKutta-Fehlberg. Además, analizaremos en particular el problema de valor inicial:
dx dt = f(t, x) x(to) = xo
el mismo que puede generalizarse a sistemas de varias ecuaciones sin mayores dificultades.
2.1. Método de Runge-Kutta-Fehlberg
En el método de Runge-Kutta se presenta el problema de determinar una medida del error en el cálculo de las soluciones. Una opción es determinar una segunda solución Xn+l,
23

obtenida mediante dos aplicaciones sucesivas del método con pasos h/2. En este caso, la diferencia Xn+l- Xn+l puede tomarse como una medida del error:
(2.1.1)
Sin embargo, el número de evaluaciones implicados en esta operación es alto, lo que no lo hace particularmente práctico para la implementación computacional. Otra alternativa es el llamado método de Runge-Kutta-Fehlberg, que usa dos métodos de Runge-Kutta de órdenes p y p + 1 para determinar Xn+l y Xn+l· La implementación más usada de este método es la que usa los métodos de Runge-Kutta de órdenes 4 y 5 para la obtención de las soluciones. Para esto, el método requiere el cálculo de las cantidades siguientes:
k1 = h f(tn, Xn)
k2 = hj(tn + hj4,Xn + ki/4)
k3 = h f(tn + 3hj8, Xn + (3 k1 + 9 k2)/32)
k4 = h f(tn + 12h/13, Xn + (1932 k1- 7200 k2 + 7296 k3)/2197)
k5 = h f(tn + h, Xn + 439 ki/216- 8 k2 + 3680 k3/513- 845 k4/4104)
k6 = h f(tn + h/2, Xn- 8 ki/27 + 2 k2- 3544 k3/2565 + 1859 k4/4104- 11 k5/40)
las seis cantidades anteriores presentan factores a primera vista engorrosos, pero tienen la ventaja de estar escritas de modo tal que pueden usarse para la implementación del método de Runge-Kutta de orden cuatro y cinco, en efecto, usando el método de orden cuatro obtenemos Xn+l:
- 25 k 1408 2197 - ~ Xn+l- Xn + 216 1 + 2565 k3 + 4104 k4 5 k5 (2.1.2)
en tanto que para orden cinco tenemos Xn+ 1 :
~ - 16 6656 k 28561 - .!!._k ~k Xn+l- Xn + 135 kl + 12825 3 + 56430 k4 50 5 +55 6 (2.1.3)
Como se dijo anteriormente, el error de truncamiento local puede estimarse como:
error= ixn+l- Xn+li
- 1-1- k - 128 k - 2197 k _!_ k ~ k 1 error - 360 1 4275 3 75240 4 + 50 5 + 55 6 (2.1.4)
El método de Runge-Kutta-Fehlberg puede usarse en sí para ajustar en paso h en la integración, de modo tal que el error se matenga por debajo de una cierta tolerancia E
prefijada. Sin embargo, nosotros optaremos por usar este método en combinación con el método de Adams-Bashforth-Moulton que pasamos a explicar a continuación.
2.2. Métodos multipasos.
Los métodos de Euler y Runge-Kutta son conocidos como métodos de un solo paso, ya que utilizan el valor de la función en un punto inmediatamente anterior para evaluar el siguiente. Esto hace que sea suficiente con conocer la condición inicial del problema para obtener la solución. Los métodos multipasos se caracterizan por usar más de un valor
24

anterior al valor que se desea calcular, por lo cual se necesitan otros valores aparte de la condición inicial. Éstos se obtienen por lo general a partir del método de Runge-Kutta.
Como ya se señaló en la introducción, queremos resolver el problema de condición inicial:
dx dt = f(t, x) x(to) = Xo
en el intervalo [t0 , tN]; haciendo la partición ti = t0 + j h, con j = O, 1, ···N y h = (tN- t0)JN, podemos integrar la ecuación anterior en el intervalo [tn-1, tn]:
l tn dx ltn tn-1 dt dt = tn-1 f(t, x(t)) dt
x(tn) = x(tn-1) + ltn f(t, x(t)) dt tn-1
(2.2.1)
En adelante resultará más cómodo emplear la notación x(ti) = Xj. La idea central detrás de los métodos multipaso es integrar la ecuación (2.2.1) aproximando la función f(t, x(t)) mediante un polinomio de grado a lo más k - 1 que pase por los k puntos (tn-k, Xn-k) · · · (tn-1, Xn-1) o (tn-k+l, Xn-k+l) · · · (tn, Xn), como muestra la figura 2.1. En el primer caso se dice que el método es explícito, ya que el punto incógnita tn no interviene en la interpolación, en tanto que en el segundo caso el método se llama implícito, porque el valor de la función en tn se usa en la interpolación.
--f(t)
........ -Pk(t)
Figura 2.1: Esquema general de un método multipaso.
Luego de realizar la integración usando la aproximación polinomial respectiva se obtiene la forma general de un método explícito (método de Adams-Bashforth):
(2.2.2)
y la de un método implícito (método de Adams-Moulton):
(2.2.3)
Donde los coeficientes f3i se obtienen de la aproximación polinomial y la posterior integración. Estos coeficientes determinan a su vez el orden del método.
25

Como se dijo anteriormente, los métodos multipasos no pueden usarse sin previamente determinar k- 1 (excluimos de aquí la condición inicial) valores de la solución para x(t) mediante algún método de un solo paso. El método más usado es el de Runge-Kutta de cuarto orden.
2.2.1. Métodos explícitos: Adams-Bashforth
En el método de Adams-Bashforth hay una estrecha relación entre el orden del método y el número k de puntos considerados en la aproximación. En efecto, las k constantes f3j deben ser determinadas imponiendo la condición de que el error de truncamiento cometido en (2.2.2) sea de un cierto orden establecido. Para esto podemos expandir en serie de Taylor cada término en el lado derecho de (2.2.2) e imponer la condición de que la expresión resultante no contenga términos de orden menor al establecido. Por ejemplo, si queremos que la solución sea cierta hasta un orden O( hP+l) en h debemos hacer:
(2.2.4)
donde x?) significa derivada i-ésima (en t) de x evaluada en t¡, y j toma los valores desde 1 hasta k. De similar manera podemos hacer:
Xn 1 = x(tn-1) = x(tn- h)
= x - h x(1) + h2
x(2) - · · · + O(hP+l) n n 2 n (2.2.5)
Si reemplazamos los resultados (2.3.1) y (2.3.2) en la expresión general (2.2.2) y agrupamos las derivadas en x obtenemos en general:
(2.2.6)
De este resultado se obtiene que las condiciones para que el método sea de orden p son que C1 = C2 = · · · = CP =O. Esto constituye un sistema de p ecuaciones lineales en los f3i, de modo que la solución única sólo se dará en el caso que p = k, es decir, en el método de Adams-Bashforth el número de puntos previos determina el orden del método.
La versión más utilizada de este método es la que usa p = k = 4. En este caso las expresiones (2.3.1) se reducen a:
h2 h3 x(1) = x(1) (t - h) = xC1) - h x(2) + - x(3) - - x(4) + O(h4)
n-1 n n n 2 n 6 n (2.2.7a)
x(1) = x(1) (t - 2h) = x(1) - 2h x(2) + 4h2 x(3) - 8h3 x(4) + O(h4) n-2 n n n 2 n 6 n (2.2.7b)
x(1) = x(1l(t - 3h) = x(1) - 3hx(2) + 9h2 x(3)- 27h3 x(4) + O(h4) n-3 n n n 2 n 6 n (2.2.7c)
16h2 64h3
x(1) = x(1) (t - 4h) = x(1) - 4h x(2) + -- x(3) - -- x(4) + O(h4) n-4 n n n 2 n 6 n (2.2.7d)
26

Reemplazando esto en (2.3.3) y usando (2.3.2) hasta el cuarto orden obtenemos lo siguientes, luego de igualar a cero los repectivos coeficients C(
-1 + !31 + !32 + !33 + !34 = o 1
-2 + !31 + 2/32 + 3/33 + 4/34 =o 1
-3 + !31 + 4/32 + 9/33 + 16/34 = o 1 -¡ + !31 + 8/32 + 27/33 + 64/34 =o
La solución de este sistema es:
59 /32 = --
24 3
!34 = --8
Con estos coeficintes escribimos la forma final de (2.2.2):
h Xn = Xn-1 +
24 [55 f(tn-1, Xn-1) -59 J(tn-2, .Y-n-2)+37 .f(tn-3, Xn-3)
- 9J(tn-4, Xn-4))
2.2.2. Métodos implícitos: Adams-Moulton
(2.2.8)
(2.2.9)
(2.2.10)
Para el método de Adams-Moulton (ecuación (2.2.3)) el análisis es fundamentalmente el mismo que para el método de Adams-Bashforth. Notemos sin embargo que ahora tenemos k + 1 constantes a determinar, lo que requiere a su vez k + 1 ecuaciones algebraicas. De la ecuación (2.3.3) deberemos tener ahora que p = k+ 1, lo cual indica que k+ 1, y no k, determina el orden del método. Por motivos que se aclararán más adelante, vamos a hallar la forma explícita de (2.2.3) para p =k+ 1 = 4, igual a como se hizo en el método de Adams-Bashforth.
Mediante una expansión en serie de Taylor como en el caso anterior, obtenemos las siguientes ecuaciones (recordar que en este caso tenemos cuatro constantes j30 , /31 , /32 y !33):
cuya solución es: 3
f3o =-8
-1 + f3o + /31 + /32 + !33 = O 1
-2 + !31 + 2/32 + 3/33 =o 1
-3 + !31 + 4/32 + 9/33 = o 1
-¡ + /31 + 8,62 + 27/33 =o
5 ,62 = --
24
(2.2.11)
(2.2.12)
y la ecuación (2.2.3) se convierte en:
h Xn = Xn-1 +
24[9J(tn-1,Xn-1) + 19.f(tn-2,Xn-2)- 5.f(tn-3,Xn-3)
.f(tn-4, Xn-4)) (2.2.13)
27

2.3. Método predictor-corrector: Adams-BashforthMoulton
Los métodos de Adams-Bashforth y Adams-Moulton son usados comúnmente en forma conjunta, lo que se denomina método corrector-predictor. En este esquema se usa un método de Adams-Bashforth (de un cierto orden p) para obtener un valor preliminar x~,, el cual será usado en el método de Adams-Moulton, del mismo orden. Llamemos J3j a los coeficientes en el método de Bashforth y j3j a aquéllos en el método de Moulton; es claro que el índice j toma valores desde 1 hasta k* en el primer caso, y hasta k en el segundo caso, cumpliéndose la relación:
k*= k+ 1
lo cual deriva del hecho de que hemos exigido que ambos métodos sean del mismo orden p (en el método de Bashforth p = k*, en tanto que en Moulton se tiene p = k+ 1). La solución predictor, se obtiene del método de Bashforth:
k*
X~= Xn-1 + h L J3j J(tn-j 1 Xn-j)
j=l
y este valor se usa en lugar de Xn en el método de Moulton:
k
Xn = Xn-1 + h J(tn, x~) + h L /3j .f(tn-j 1 Xn-j)
j=l
(2.3.1)
(2.3.2)
Si luego de la ejecución del método corrector, se tiene que la diferencia lx~ -xnl es superior a un cierto valor límite (tolerancia), entonces en lugar de volver a corregir el resultado con el método de Moulton, se opta por cambiar el tamaño del paso h. Un algoritmo usual (y que es el que nosotros usaremos), consiste el disminuir el paso a la mitad hasta que 1 x~ - Xn 1 sea menor a la tolerancia. La implementación de este método se muestra en el apéndice.
28

Capítulo 3
Movimiento de una espira circular en un campo magnético uniforme
En este capítulo se analizará el movimiento de un circuito eléctrico en forma circular (espira circular en adelante) colocado en un campo magnético homogéneo y constante. Se determinarán las ecuaciones que gobiernan el movimiento rotacional del sistema usando primero las ecuaciones de movimiento de Euler, y luego el formalismo de Hamilton, es decir se encontrará primero la función de Hamilton del sistema y a partir de allí las ecuaciones canónicas. Como es natural al trabajar con un cuerpo rígido, vamos a usar un sistema de coordenadas X 1X2X 3 fijo a la espira y otro sistema XY Z de coordenadas inercial, ambos con origen común. Esto último es posible ya que la fuerza neta sobre un circuito cerrado debido a un campo magnético uniforme es nula, por ello no perdemos generalidad si consideramos el centro de masa de la espira en el origen de ambos sistemas de referencia y sólo consideramos el movimiento de rotación (lo cual es equivalente a afirmar que la velocidad inicial del centro de masa de la espira es nula). El uso de los ángulos de Euler será extensivo en esta parte y en secciones posteriores. En este caso, como en el próximo, sólo se considerarán la fuerza magnética sobre la espira.
3.1. Obtención de las ecuaciones de movimiento mediante las ecuaciones de Euler
En la sección 1 se demostró que el torque sobre una distribución de corriente en un campo magnético exterior B es:
f=rñxB
donde el campo magnético se evalúa en el punto en relación al cual se toma el torque. Cuando el campo magnético es homogéneo, como en nuestro caso, es irrelevante el punto en el cual se evalúa el campo. El momento magnético m de la espira es:
m=JS
Donde S es el área vectorial de la espira siguiendo la regla de la mano derecha en la dirección de la corriente. La figura 3.1 muestra un esquema de los sistemas de coordenadas que usaremos en este problema. Como se dijo anteriormente, un campo magnético homogéneo
29

no ejerce fuerza sobre una espira cerrada por lo que no perdemos generalidad si ubicamos un sistema de referencia inercial centrado en el centro de la espira y en reposo. Entonces el torque se calculará en referencia a este punto. Los vectores de base en el sistema de referencia inercial son {i, j, k} y el sistema fijo al cuerpo tenemos la base {e1, e2, e3}.
z
j
y
Figura 3.1: Sistemas de referencia usados.
Si llamamos m al módulo del momento magnético de la espira tendríamos que:
El campo mágnético homogéneo los escribiremos como B = B0 k. Usando las relaciones entre los vectores unitarios ei y los vectores de base de la referencia inercial la expresión para el torque sobre la espira queda como:
T = mBsenO [- cos 'ljJ e1 +sen 'ljJ e2] (3.1.1)
Es importante notar en la ecuación anterior que en este caso no hay componente a lo largo del eje de simetría e3 . Ésta es en realidad una característica general de las espiras planas en campos homogéneos paralelos a k, como veremos más adelante. De la figura 3.1 se observa que los ejes X1 X2 X3 coinciden con los ejes principales de inercia de la espira, con momentos principales de inercia l¡, !2 e h respectivamente. A su vez, la velocidad angular de la espira se escribe como w = w1 e1 + w2 e2 + w3 e 3 , en el sistema de ejes fijos al cuerpo. Recordando que las componentes wk cumplen las ecuaciones de Euler (ecuaciones (1.1.29)), obtenemos lo siguiente:
T1 = I1w1 - (!2 - I3)w2w3
T2 = hw2- (h -l¡)w1w3
T3 = hw3 - U1 - I2)w1w2
30

Recordemos que en las ecuaciones anteriores estamos considerando sólo las interacciones de la espira con el campo magnético (despreciando, por ejemplo, la interacción gravitatoria). Debido a la simetría, los momentos de inercia 11 y h resultan iguales y además con valor 1 = M R2 /2, siendo M y R la masa y el radio de la espira respectivamente. El momento de inercia 13 posee una valor igual a 21, por el teorema de los ejes perpendiculares. Hemos hecho notar además que la componente T3 es igual a cero, de modo que las ecuaciones de Euler se convierten en:
T1 = 1wl + 1wzw3
Tz = 1w2 - 1w1w3 w3 =O
(3.1.2a)
(3.1.2b)
(3.1.2c)
La tercera ecuación nos muestra la conservación de la tercera componente de la velocidad angular en el sistema de ejes del cuerpo, luego w3 (t) = w3 (0). Sabemos que las componentes de la velocidad angular (en la base {e k}) se relacionan con los ángulos de Euler según las ecuaciones:
. . w1 = qy sen O sen'l/J + Ocos'l/J
Wz = 1 sen O cos'l/J - Osen'l/J
w3 = 1cos0 + ~
En este sentido, la ecuación (3.1.2c) se convierte en:
~cosO- 1 O senO+;(; = O
(3.1.3a)
(3.1.3b)
(3.1.3c)
(3.1.4)
Definiendo la constante w5 = mB/1, las ecuaciones (3.1.2a) y (3.1.2b), conjuntamente con (3.1.1), se transforman en:
-w6 senO cos '1/J = ~ senOsen'l/J + 1 iJ cos Osen'l/J + 1 ~senO cos '1/J + B cos '1/J-
iJ~semjJ + w3 (1sen0cos'i/J- Bsen'l/J) (3.1.5a)
w6 senO sen'l/J = ~senO cos '1/J + 1 iJ cosO cos '1/J - 1 ~ senOsen'l/J - B sem/J-
iJ~ cos'l/J- w3 (1sen0sen'l/J + Ocos'l/J) (3.1.5b)
De la ecuación (3.1.2c) tenemos que w3 es constante por lo que se incluye en las ecuaciones anteriores. Las ecuaciones (3.1.5a) y (3.1.5b), en la forma en la que están presentadas, no son útiles para la aplicación de métodos numéricos en su solución. Necesitamos encontrar un sistema de ecuaciones equivalente a (3.1.4), (3.1.5a) y (3.1.5b) donde sólo haya una segunda derivada temporal en cada ecuación. Esto se puede lograr por ejemplo si multiplicamos la ecuación (3.1.5a) por cos'l/J y la ecuación (3.1.5b) por sen'l/J y luego restamos, obteniendo luego de simplificar:
B = - [w5 + 21 ~ + 1 2 cosO] senO (3.1.6)
Si ahora multiplicamos la ecuación (3.1.5a) por sen'l/J y la ecuación (3.1.5b) por cos'l/J y sumamos se obtiene: .. .
cjy senO = w3 O + O '1/J - cjy O cosO (3.1.7)
31

Las ecuaciones (3.1.4) y (3.1.7) pueden manipularse a fin de obtener ecuaciones con sólo una variable con segunda derivada temporal. En efecto, multiplicando la ecuación (3.1.4) por senO y la ecuación (3.1.7) por cosO y restándolas obtenemos:
;¡;senO = iJ ( ~ sen20- 2 -J; cosO) (3.1.8)
Las ecuaciones (3.1.6), (3.1.7) y (3.1.8) constituyen el sistema de ecuaciones diferenciales que nos darán el comportamiento de la espira. Finalmente resumimos:
¡j = - ( w5 + 2 ~;p + ~2 cos O ) senO
.. 20'1/J <P=-
senB ;¡; = iJ (~senO - 2 -J; ctgO)
(3.1.9a)
(3.1.9b)
(3.1.9c)
El sistema anterior es un sistema de tres ecuaciones de segundo orden, no lineales y acopladas, por lo que se requieren seis condiciones iniciales para obtener una solución única, las cuales sólo pueden ser obtenidas numéricamente. No obstante, en el presente trabajo analizaremos el movimiento usando la dinámica de Hamilton (para poder analizar el espacio de fases).
3.2. Hamiltoniano de la espira circular y ecuaciones , .
canon1cas.
Para llevar a cabo el estudio de las propiedades de las soluciones de la espira circular en el espacio de fases, debemos estudiar las ecuaciones canónicas de Hamilton del sistema. Primero, la energía potencial de una espira en un campo magnético homogéneo viene dada por la ecuación (1.3.24):
U= -m·B (3.2.1)
La energía cinética de la espira (como de todo cuerpo rígido), se compone de las energías de rotación, traslación y una combinación de ambas (véase sección 1.1.2); pero ya que en este caso sólo tenemos movimiento rotacional y además los ejes fijos a la espira son ejes principales de inercia (lo que puede deducirse de la simetría), tenemos que la energía cinética es puramente rotacional:
La función de Lagrange de la espira sería entonces:
recordando que las componentes wk son funciones de los ángulos de Euler y de sus derivadas. Usando las expresiones para las componentes wk se llega a:
L = f(e2 + sen20 ~2 ) + I (-J; + ~ cos 0)2 + mB cosO
32
(3.2.2)

La función de Lagrange de la espira circular no posee dependencia en <P y '1/J, por lo cual los momentos generalizados P'I/J y P<t> se mantendrán constantes en el tiempo. Aplicando la definición de momento generalizado se obtiene:
aL . Po=-.= 10 a e
aL . 2 . P<t> = -. = 1 </J (1 + cos O) + 21 '1/J cos (}
a<P aL . .
P'I/J = -. = 21 </J cos (} + 21 '1/J a'ljJ
(3.2.3a)
(3.2.3b)
(3.2.3c)
Debemos recordar antes de continuar que en el formalismo de Hamilton, las variables para la descripción del sistema físico son los momentos generalizados y las coordenadas generalizadas., mientras que en el formalismo de Lagrange se usaban velocidades genera- · lizadas y coordenadas generalizadas. De las ecuaciones (3.2.3) despejamos las velocidades generalizadas:
iJ =Po 1
~ = P<t> - cos (} P'I/J 1 sen20
· P'I/J cos (} '1/J = 21- (P<t>- cosOp'I/J) 1sen2()
(3.2.4a)
(3.2.4b)
(3.2.4c)
De las ecuaciones (3.2.2) y (3.2.4) es directo obtener la función de Hamilton H de la espira circular en un campo magnético uniforme:
i=l
p~ P~ (P<t> - cos (} P'I/J )2 B (} = -+-+ -m cos
21 41 21sen20 (3.2.5)
Debido a que P<t> y P'I/J son constantes de movimiento, podemos restringir el espacio de fases de nuestro problema a uno de dos dimensiones en Po y O. Recordemos que las ecl).aciones canónicas son:
. aHc p·---.- aqi
que para nuestro caso se convierten en:
. aHc Po=---ae . aHc
P<t> = --a<jJ
. aHc P'I/J=--
a'ljJ
33

Usando estas relaciones y la función de Hamilton (3.2.5) obtenemos:
. 1 Po= 3e [cose(p~+p~)-(1+cos2 e)pq,p,¡,] -mBsene
!sen
iJ =Po/ I
~ = p,¡,- cosep,¡, I sen2e
· P,¡, cose '1/J = 21 ~ (P,p- cos ep,¡,) I sen20
P<~> =o P,¡, =o
(3.2.6a)
(3.2.6b)
(3.2.6c)
(3.2.6d)
(3.2.6e)
(3.2.6f)
Las ecuaciones (3.2.6) consituyen las ecuaciones dinámicas de la espira circular. Es interesante notar que, debido a que las dos últimas ecuaciones son equivalentes a P,p = cte y P,¡, = cte, existe una cierta separación en estas ecuaciones. En efecto, las dos primeras ecuaciones pueden resolverse en forma independiente pues no contienen dependencia con las variables de las otras dos ecuaciones (teniendo en cuenta lo dicho al comienzo). Ésta es una manifestación de la reducción del espacio de fases de seis a sólo dos dimensiones. Una vez calculado e de las dos primeras ecuaciones, éste puede usarse para integrar las ecuaciones para c/J y '1/J:
3.3.
cjJ(t) = cjJ(t0 ) + ¡t dz~(z) Jto 'lj;(t) = 'if;(to) + {t dz ~(z)
}t0
Ecuaciones canónicas adimensionales
Para resolver numéricamente el sistema (3.2.6) vamos a escribir las ecuaciones en forma adimensional. Para esto notemos que en este caso los momentos generalizados tienen dimensiones de energía por tiempo (ya que las velocidades generalizadas tienen dimensiones de frecuencia). Recordemos que se había definido la frecuencia w5 = mB / I. Definamos ahora las constantes:
b= p,¡, I
(3.3.1)
donde a y b tienen unidades de frecuencia por lo dicho anteriormente (ya que I tiene unidades de energía por tiempo al cuadrado). De esta forma podemos definir las constantes adimensionales:
a R=..!!_ a=-, fJ wo Wo
(3.3.2)
Con estas definiciones podemos adimensionalizar el momento Po y el tiempo para definir las cantidades Jo y T según:
T=Wot, Po
.fo=-1 wo
con lo cual la ecuación para p0 se escribe ahora como:
d.fo 1 2 2 2 -=~e [(a + (3 ) cose- (1 + cos O) a(3]- senO dT sen
34
(3.3.3)

la cual sólo involucra cantidades adimensionales. Siguiendo un procedimiento similar llegamos a las demás ecuaciones en forma adimensional. El sistema de ecuaciones adimensionales resultante es:
dfe 1 2 2 2 -d = -----s-e [ (a + f3 ) cose- (1 + cos O) a/3] -senO
T sen
d(} =fe dT dc/J a - (3 cos (} dT sen2(} d~ (3 cose dT = 2- (a- (3 COS (}) sen2(}
(3.3.4a)
(3.3.4b)
(3.3.4c)
(3.3.4d)
Trabajar con ecuaciones adimensionales evita la cuestión de las unidades que deberían usarse en una situación en particular. En un problema concreto debería darse los valores de 1 y mB en sus respectivas unidades, los cuales nos dan el valor de la frecuencia w0 ,
lo que a su vez nos da la escala temporal. Luego de resolver el sistema (3.3.4) pueden recuperarse las cantidades con sus respectivas dimensiones tan sólo usando las relaciones (3.3.1), (3.3.2) y (3.3.3).
Podemos definir además una energía adimensional Ea· En efecto, de la función de Hamilton (3.2.5) tenemos que la energía E de la espira es:
E= P~ + P~ + (P<t>- cosfJp..p)2
_ B f) 21 41 21 sen2(} m cos
donde se sobreentiende que las variables canónicas son funciones del tiempo que satisfacen las ecuaciones canónicas de Hamilton (trayectorias físicas). Definimos la energía adimensional Ea como:
E Ea= -1 2
wo
y usando las definiciones de a, (3, T y fe se llega directamente a:
· Ji /32 (a - (3 cos 8)2
Ea= 2 + 4 + 2sen2() -cose (3.3.5)
3.4. Integración de las ecuaciones de movimiento.
Antes de integrar numéricamente el sistema (3.3.4), demostraremos que es posible hallar soluciones analíticas (cuadraturas) para las variables de la espira. Esto es posible para la espira circular ya que se trata de un sistema con tantos grados de libertad como integrales de movimiento (esto se conoce a veces como crite~io de Liouville [4]). Para esto debemos escribir la energía E en términos sólo de f) y (}, lo cual es posible en este caso ya que P<t> y P..p son constantes de movimiento, y además Jy y ~ se expresan en función de (} (véase (3.2.6c) y (3.2.6d)). Luego de reemplazar en el hamiltoniano las expresiones para Pt/> y P..p y acomodando términos obtenemos:
E - p~ - 1¡p (p<P- cos()p..p)2- B () 41 - 2 + 2! sen2(} m cos (3.4.1)
35

Definamos la constante e y la función U( O) de modo tal que:
2 e= l (E- p~/41)
Iu(O) = (p<P-cos0p,¡;)2- B O 2 21 sen20 m cos
de esta forma, la ecuación (3.4.1) se convierte en:
iP +U( O) =e
Esta ecuación puede reducirse a cuadraturas:
¡t dt' = ± 1(} --¡==d=O===' ~ lto 00 Je- U(O')
1(} dO' t = t0 ± ---;==::=:==~
00 Je- U(O')
(3.4.2)
(3.4.3)
La ecuación (3.4.3) puede (al menos en principio, si realizamos la integral) invertirse para darnos O(t). La dependencia en cp y '1/J puede obtenerse observando que las ecuaciones en (3.3.4c) y (3.3.4d) sólo dependen de O (salvo constantes). Similar situación se presenta para PO·
La integración de (3.4.3) con el U antes definido no puede llevarse a cabo en forma analítica. En lugar de ello, observemos que la ecuación (3.4.2), junto con la definición de la función U (O) nos da útil información acerca del movimiento de la espira. La gráfica de U( O) presenta formas claramente distintas para P<P =p.,¡;, P<P = -p,¡; y p~ =/= p~. En los dos primeros casos U(O) se reduce respectivamente a:
2mB p2
u1 (o) = --1
- coso + 1~ tgo /2
2mB p~ U2 (0) =--¡-cosO+ 12 ctg0/2
lo que lleva a:
lím U1 (O) = - 2m1
B lím U1 (O) = +oo o~o e~~
lím U2(0) = +oo lím U2(0) =O (}~O (}~~
En el caso p~ # p~, la gráfica de U(O) es como se muestra en la figura 3.2(c). La expresión para U (O) muestra claramente que en esta situación se tiene:
lím U(O) = +oo o~o.~
Si buscamos movimientos periódicos en O observamos que éstos sólo se dan cuando p~ =/= p~, puesto que sólo en este caso el potencial U (O) presenta un pozo (por existir un valor mínimo de U). Nos limitaremos a estudiar este caso. La ecuación (3.4.2) restringe el movimiento a una región de valores de O tal que:
U(O) ::; e
36

U(O) U(O) U(O)
() ()
o 1r: o 1[·
(a)pq, =p..¡, (b) Pq, =-p..¡,
Figura 3.2: Gráficas de U(O) = (pq,- p,¡; cos8)2/12 sen28- 2mB cosO ji para tres diferentes casos. Es claro que sólo en el caso (e) se obtiene un movimiento oscilatorio en 8.
Como la función U( O) presenta un pozo de potencial, es claro que el movimiento de la espira está limitado por los dos valores de() que resultan de resolver la ecuación algebraica:
U(O) =e (3.4.4)
Las soluciones de esta ecuación las denotaremos Om y ()M, siendo ()m< ()M; Estas soluciones se conocen como puntos de retorno del sistema, y se caracterizan porque en estos puntos se tiene iJ = O, lo que puede deducirse de las ecuaciones (3.4.2) y (3.4.4). Recordando la definición de U( O) y que pq, =al y p,¡; = bl, escribimos la ecuación (3.4.4) como:
(a- b cos 0) 2 - sen28 (2w5 cos ()+e) = O (3.4.5)
pero a su vez a = ajw0 y (3 = bjw0 (véase la ecuación (3.3.2)), y haciendo además u= cos () obtenemos que la ecuación (3.4.5) se transforma en:
(a- f3u) 2- (1-u2)(2u+'Y) =O (3.4.6)
donde 'Y = efw5 = 2(Ea - /32 /4). La ecuación (3.4.6) es una ecuación cúbica en u y determina los valores de () entre los cuales se limita el movimiento de la espira. La figura 3.3 ilustra el movimiento resultante de la espira.
El pozo de potencial de U(O) indica que el movimiento en esta variable (al que usualmente se denomina nutación) es periódico (aunque no necesariamente armónico). El período de las oscilaciones en () de la espira se obtienen de integrar (3.4.2) entre los valores mínimo y máximo de 0:
3.5.
T=2 10M d{)
e.,. y'e-U(O) (3.4. 7)
Movimiento con velocidad angular inicial paralela al eje de simetría.
Un caso particularmente interesante se presenta cuando las condiciones iniciales para las velocidades generalizadas son tales que:
O( O) = ~(O) = O,
37

que corresponden al caso de una espira que inicialmente rota en torno a su eje de simetría. Bajo estas condiciones los momentos generalizados constantes resultan:
Cumpliéndose la relación:
P<P = 21 0 0 cos e0
P'I/J = 2/0o
P<P = cos Bo P'I/J
Reemplazando en la ecuación (3.2.6c) obtenemos:
· 200 cj; =~e (cose0 - cosO)
sen (3.5.1)
Busquemos una fórmula para los puntos de retorno (ecuación (3.4.6)) en este caso. El factor 'Y se escribe como:
(32 'Y= 2(Ea- 4) = -2 cosBo
reemplazando en la citada ecuación y acomodando términos se obtiene:
2 ( cos e - cos 80 ) ( cos 8 - cos 80 - (32 ( 1 - cos2 B)] = O (3.5.2)
k
Figura 3.3: Movimiento del eje de la espira restringido a una máximo y mínimo valor de e.
Los puntos de retorno se obtienen de resolver esta ecuación trigonométrica. Es evidente que estas soluciones dependerán del parámetro (3. Es también evidente que e = 80 es un punto de retorno. El otro valor se obtiene de:
(32 (32 cos2 e+ 2 cose- (1 + 2 cos Bo) = O
que es una ecuación cuadrática en cose. Su solución físicamente aceptable es:
(32 1 cose= - 4 + ¡V/34 + 8(32 cose0 + 16
38

Obtengamos ahora una expresión para el período de las oscilaciones de O. Esto se obtiene directamente de la ecuación (3.4.2) dividiéndola entre w5, lo cual resulta:
( d())2 + ~ = ')' dr w2
o
la expresión anterior se escribe en la siguientes forma (recordando que en este caso a = f3 cos Oo):
(d())2 _ ( () ()) [ 2 /32
(cos0- cos00 ) J - - cos - cos o - --'------,-----~
dr 1- cos2 ()
Si introducimos la notación ()m y ()M para referirnos al valor mínimo y máximo de () respectivamente, el período resulta finalmente:
T = 2 {(}M --¡:.======d=()===;=~===::==::::::==:== JO m ( () () ) [ 2 /32
( COS () - COS O o) ] cos - cos o - ----~--'-1- cos2 ()
(3.5.3)
La valor de la integral anterior puede obtenerse mediante métodos numéricos teniendo en cuenta que se trata de una integral impropia, por lo cual los métodos usuales (métodos del trapecio y de Simpson), no son los más adecuados en este caso.
3.6. Análisis cualitativo de los puntos de retorno
El sistema (3.3.4) depende únicamente de los parámetros a y /3. Fijados los valores de estos parámetros, la forma de las soluciones pasa a depender ahora de las condiciones iniciales de los ángulos y Jo (es decir Po). En el conjunto de los seis grados de libertad, sabemos que dos de éstos (p,¡, y p,p) son constantes de movimiento, así que sus valores pueden considerarse a su vez como parámetros del sistema. Ya hemos visto que cuando p~ =1- p~, el movimiento en() está restringido a unos límites bien definidos. A continuación se demostrará que la forma particular de la solución dependerá de la ubicación de estos límites con respecto a un valor crítico igual a pq,jp,p.
Recordemos que los valores de () entre los cuales se da el movimiento de la espira están dados por la ecuación (3.4.6) (con cosO= u):
f(u) =O (3.6.1)
donde: f(u) =(a- f3u) 2
- (1- u2) (2u+l') (3.6.2)
La gráfica de la función f(u) es como se muestra en la figura 3.4. Nótese que !(±1) >O (excepto en el caso a 2 = /32, que no estamos considerando). Además, para valores grandes de lul el polinomio f(u) se comporta como:
Se observa que existen sólo dos soluciones para u aceptables, como debe ocurrir. Las condiciones iniciales fijarán el valor de ')' = e/w5, y por ende la forma de las soluciones. Para resolver la ecuación (3.6.1) (puntos de retorno) se usa el método de Newton-Raphson teniendo en cuenta que previamente se requiere una gráfica de f (u) en cada caso particular,
39

a fin de estimar el valor de las soluciones. Para esto se usan las funciones FuncRet.py y NewtonRet.py del archivo ModuloNewton.py. El valor de la máxima raiz u2 (que corresponde al coseno del mínimo valor de 8) en relación a p,¡,jp,¡; (o equivalentemente aj (3) determina el comportamiento de las soluciones. En efecto, de la ecuación para qy:
dqy a - (3 cos (J
dT sen28
f(u)
-1 +1
Figura 3.4: Forma general de la función f.
se presentan tres casos [2]:
(a) Si se cumple que u1 < aj (3 < u2 , se tendrá que~ cambia de signo en forma alternada, haciéndose cero cada vez que cos (J = aj (3.
(b) Si a j (3 > u2 , el signo de ~ no cambia y qy presenta la misma monotonía para todo instante de tiempo.
(e) Si a/ (3 = u1 (o u2) qy presenta puntos de inflexión en estos puntos. Esto se deduce del hecho de que en este punto qy no puede presentar ni un máximo ni un mínimo, ya que esto requiere que ~ cambie de signo estrictamente (pase de positivo a negativo o viceversa), lo cual no ocurre en este caso.
3.7. Solución numérica de las ecuaciones de movimiento.
Las ecuaciones canomcas adimensionales (3.3.4) constituyen un sistema de cuatro ecuaciones diferenciales no lineales, por lo cual pueden resolverse numéricamente en forma directa usando diferentes métodos. En este trabajo usaremos el método de AdamsBashforth-Moulton (predictor-corrector), ya que nos provee de mejores resultados que los métodos de Runge-Kutta. Debemos recordar sin embargo, que este método predictorcorrector no puede iniciarse con tan sólo las condiciones iniciales, sino que debemos disponer de otros tres valores adicionales de las funciones. Éstos serán obtenidos por el método de Runge-Kutta-Fehlberg de cuarto orden (véase sección 2.5).
Vamos a resolver el problema numéricamente usando las ecuaciones adimensionales en diferentes intervalos del parámetro T. Usaremos el lenguaje de programación Python en
40

su versión 3.2 bajo GNU /Linux Ubuntu, debido a su rapidez y a que es de código abierto. Todas las gráficas se realizaron con el paquete GNUplot (versión 4.4 patchlevel 3). Evidentemente, si queremos una solución única para el sistema (3.3.4) debemos especificar condiciones iniciales para las cuatro variables en cuestión. El sistema de ecuaciones adimensionales que queremos resolver está determinado únicamente por las dos constants adimensionales a y (3.
Queremos contemplar los tres casos considerados en la sección 3.6. Por ello, en todas las figuras siguientes vamos a usar las condiciones iniciales:
Jo(O) =O, 5 e(o) = 1, 047 (60°) </>(0) = V;(O) = O
salvo en el tercer caso, en que se usará Jo(O) =O, y ajustaremos los valores de los parámetros a y (3. Las figuras adjuntas muestran las gráficas de las variables canónicas para tres pares diferentes de valores de a y (3.
Se muestran sólo las gráficas de Jo y e para a = 1, 2 y (3 = 2, O (figura 3.5), el comportamiento de estaa soluciones en los demás casos es completamente análogo. La periodicidad de e se obtiene directamente de la figura 3.2c, que presenta un pozo de potencial, en tanto que la de Jo se deduce de ser igual a la derivada de una función periódica (véase ecuación (3.3.4b)). Las diferencias más notorias aparecen en <P (figura 3.6). Se observa que en el primer caso <P presenta máximos y mínimos locales, que correspoden a los instantes en los que cose= a/ (3, aunque la función es globalmente decreciente. Las zonas localmente crecientes y decrecientes se explican porque en este caso los límites en u= cose son aproximadamente O, 42 y O, 86, que son respectivamente menor y mayor a a/ (3 =O, 6 para nuestro caso. En el segundo caso se tiene a= 2, 2 y (3 = 1, 2, lo que nos da a/ f3 mayor que l. Los límites en cose en este caso son 0,42 y 0,80, ambos naturalment~ menores a uno, por lo cual las función </> es monótonamente creciente en este caso.
En el tercer caso tenemos que Jo(O) = O (a diferencia de los casos anteriores donde J0 (0) = O, 5), y además a = O, 6 y f3 = 1, 2. Las límites en cose son en este caso 0,5 y 0,86. Vemos pues que el primero de estos límites coincide con a/ (3 =O, 5. De la ecuación (3.3.4c) notamos que en este caso ~ ~ O para todo instante de tiempo (la igualdad se da en los instantes donde cose= a/ (3). Ya que que la función es en todo momento no creciente, se sigue que los puntos donde ~ = O son puntos de inflexión, y no máximos ni mínimos como en el primer caso, lo cual se observa claramente en la tercera figura 3.6.
En la figura (3. 7) se muestra el diagrama de fases típico para este caso. Se observa que la relación entre Jo y e forma una curva cerrada, lo cual es típico de movimientos periódicos. Este mismo resultado puede deducirse fácilmente de la ecuación (3.3.5), que describe la relación funcional entre e y Jo. Debido a que esta relación es invariante ante la transformación Jo -+ -Jo, podemos analizar sólo la región correspondiente a Jo ~ O, es decir:
f, - J -(a - f3 cos e)2
2 e o- , 2e + cos sen
Es evidente, de la ecuación (3.4.5) o (3.4.6), que Jo se anula en los puntos de retorno. Es más, recordando la definición de la función J (ecuación (3.6.2)) tenemos:
Jo= ~e J-J(cose) sen
cuya derivada es: dJ0 sene !'(cosO)+ 2cose !(cose)
de 2sen20 J-J ( cos e)
41

es daro de la figura 3.4 que f' no es cero en los puntos de retorno, por lo tanto en estos puntm; se tiene que la pendiente de la gráfica de Jo es vertical. Completando la gráfica en la región Jo <O se obtiene la gráfica de la figura 3.7.
Por otra parte, una forma usual de describir el movimiento de la espira en el espacio es trazar la trayectoria que sigue la intersección del eje de la espira con una superficie esférica de radio unitario (conocido como lugar geométrico del eje de la figura) [2]. Para este fin recordemos que el eje de la espira está en la dirección del vector unitario e3, que a su vez se relaciona con los ángulos de Euler según:
e3 = senO cos </J i - senO sen</J j + cos O k (3.7.1)
La figura 3.8 y 3.9 (páginas 43 y 44) muestran estas gráficas para las condiciones iniciales dadas anteriormente.
1.2 . ........ _Jid-0.6
o
-0.6
a=1,2 A:2 Ü J-1 ' J
-1.2 '-------'-------'-------'-----....L....-----' o 2 4 6 8 10
Figura 3.5: Dependencia temporal de Jo y fJ en la espira circular con parámetros a = 1, 2 y f3 = 2, O. Se observa el carácter periódico de las soluciones. Para diferentes valores de a y f3 se obtienen soluciones similares.
Est<lli gráfkas reflejan lo obtenido en las gráfi<.:as de O, donde se observó que esta variable se halla entre dos valores definidos. Además se observa que en los dos primeros casos las curvas mostradas son tangentes a los círculos menor y mayor. Los rizos que se observan en la segunda figura provienen del cambio en el tipo de monotonía en </J. En la primera figura </J es creciente en todo momento: en tanto que en ·la segunda figura </J
crece y decrece en forma alternada: lo que da lugar a los rizos. Este análisis puede hacerse
42

usando la dependencia entre e y qy. Sin embargo, uo dispouemos de la función explídta O(qy), pero tenemos la derivada:
dO dO/dr dqy dqy/dr
senO ..¡r-_--::1:-;-( c-os-o=)
a- f3 cosO (3.7.2)
La ecuación anterior nos permite explicar las gráficas de las figuras 3.8 y 3.9. La primera gráfica en 3.8 c.:orresponde al caso en que el cociente aj f3 se halla entre los cosenos de los puntos de retorno (e.,. y O M). En este caso es obvio de ( 3. 7. 2) que dO j dqy es cero en los puntos de retorno (en estos puntos se tiene f (e) = O y a- (3 cosO =!= O), por lo que la curva es horizontal en estos puntos. A su vez, cuando se tiene cosO = aj f3 se obtiene también que dO j dqy tiende al infinito (el numerador no se anula en este caso); de aquí resulta que la curva en este caso presente una pendiente vertical para dicho valor de O.
Cuando a/ f3 es mayor que u2 (cos Om), entonces el denominador de (3.7.2) no puede hacerse cero para ningún valor de O y la función O ( qy) sólo presenta una pendiente horizontal en los puntos de retorno, como se muestra en la segunda gráfica de 3.8. El carácter intrincado de esta figura proviene del hecho de que el período de e (como función de qy) es muy grande en comparación con 21r; por esta razón la curva debe dar varias vueltas (sin cerrarse sobre sí misma) antes de completar un período.
0.8 . ············---~---- .... ·----------·--·-··- ~=2,0-1
0.4
-0.4
-0.8
0.5 0.6 0.7 0.8 0.9 1.1 1.2
e
Figura 3.6: Diagrama de fases típico para la espira circular. La forma cerrada del mismo es característica de los movimientos periódicos (en este caso la periodicidad es en ()).
43

~ ~
<1> 6 ------------------------------
3
o!'"<"= ~
-3
a=1,2 a=1,8 a=0,6
~=2,0-
~=1,2-
=12-,
-6L-----------~----------~-----------L----------~------------o 2 4 6 8 10
t
Figura 3. 7: Dependencia temporal de qy en la espira circular para diferentes parámetros. Como se discutión en la sección 3.6, se presentan tres casos: (a) O< cosOM < a//3, lo que da lugar a máximos y mínimos, (b) a> /3, en este caso qy presenta una monotonía estricta (en este caso ~ > O), y en (e) se tiene que a/ (3 = e os() M, lo que hace que qy presente puntos de inflexión.

La tercera situación es la ilustrada en la figura 3.9, y que corresponde al caso en el que uno de los puntos de retorno (en este caso eM) cumple la condición cose= aj(3. De aquí se deduce que:
a-(3cose~o
cumpliéndose la igualdad sólo en eM· Por lo tanto, en este caso se tendrá que en eM la derivada dO/d<P es de la forma 0/0 (forma indeterminada); sin embargo podemos hallar este límite mediante el teorema de L'Hopital:
dO d[sene J -.f(cose) ]/dO d<jy d[ a- (3 cosO]jdO
-2 cose f(cose) + sen28 f'(cos e)
2(3 J- j(cose) (3.7.3)
de la expresión anterior se deduce que dO/d<P es infinita en eM (se anula el denominador mas no el numerador ya que f' es diferente de cero en cualquiera de los puntos de retorno). Se concluye que la gráfica de O(<P) tiene pendiente vertical justamente en eM, como se aprecia en la figura 3.9. Hay que señalar además que este resultado se obtuvo con condiciones iniciales específicas, por lo que es posible que al pasar a otras condiciones se obtenga que ahora la pendiente en e( <P) se haga infinita en em (el menor punto de retorno).
3.8. Precesión regular en la espira circular
Bajo ciertas condiciones es posible hallar soluciones para las cuales el movimiento de la espira circular es tal que e es constante (el eje de simetría de la espira se mueve en la superficie de un cono). Para esto, notemos que las dos primeras ecuaciones canónicas (3.2.6) pueden tratarse en forma independiente de las dos últimas, ya que no tienen dependencia en <P ni '1/J. Queremos soluciones tales que iJ =Po= O (es decir, en las que p0
y e sean constantes e iguales a sus valores iniciales), lo cual nos lleva a resolver el sistema siguiente (véase (3.2.6a) y (3.2.6b)):
1 1 38 [cose (p~ + p~) - (1 + cos2 8) P<PP..P] - mB senO = O
sen Po= O (3.8.1)
que constituye un sistema de ecuaciones independientes para e y p0 . La solución para p0
es evidentemente cero, la solución para e puede hallarse haciendo el cambio u = cose, tenemos entonces (luego de pequeñas modificaciones):
(3.8.2)
La ecuación anterior es de cuarto orden (que al resolverse nos dará 8(0), ya que el movimiento es estacionario en 8), así que debe resolverse numéricamente. Escribiendo esta ecuación en forma adimensional obtenemos:
(3.8.3)
45

8=80 k
o
8=80 k
-------
o
.5
Figura 3.8: Movimiento del eje de la espira. Se muestra también la dirección del campo magnético homogéneo con fines de referencia. Esta figura se relacion con lo obtenido en la gráfica 3.6. En la figura superior se observa que ~ se anula en los puntos donde se presentan los rizos.
46

8=80 k
··-... _
.5
o
Figura 3.9: Movimiento del eje de la espira.
Hallaremos la raíz con los siguientes parámetros adimensionales:
a= 2,0 (3 = 1, o
La ecuación (3.8.3) se resuelve por el método de Newton-Raphson (en el apéndice respectivo de muestra la función newton, que forma parte del módulo ModuloNewton.py). Con los valores dados se obtienen cuatro raíces, de las cuales sólo una es físicamente aceptable e igual a:
cos 00 = 0,63188
(lo que resulta aproximadamente Oo =50, 8°). Las soluciones para las variables canónicas obtenidas en este caso se muestra en la figura 3.10. Se usó además 4J(O) = '1/'(0) = O. De allí se observa que las soluciones en (} y fo son efectivamente estacionarias, en tanto que 4J y '!/> son funciones lineales del tiempo.
47
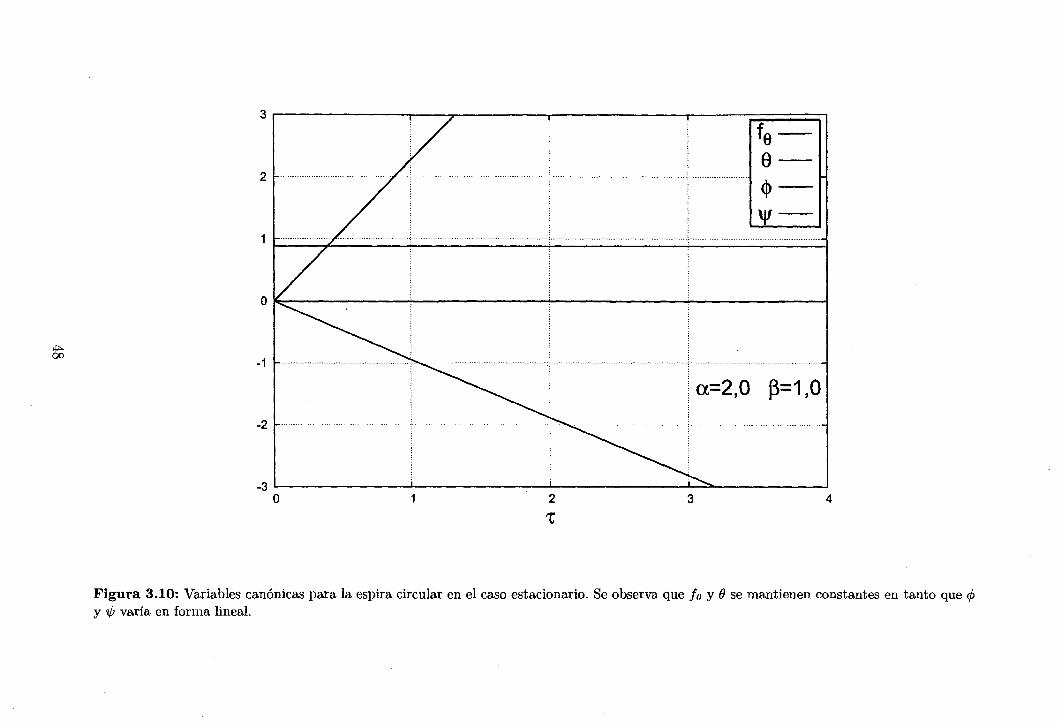
..,.. 00
3 f0
2 e<1>-
0~--------------------------~--------------~------------~
-1
(3=1 ,O
-2
-3~------------~------------~~------------~~----------~ o 1 2 3 4
't
Figura 3.10: Variables canónicas para la espira circular en el caso estacionario. Se observa que Jo y() se mantienen constantes en tanto que cjJ
y 1/J varía en forma lineal.

Es claro que las soluciones de (3.8.2) (o (3.8.3)) no tienen por qué hallarse en el intervalo [-1, 1] para cualquier conjunto de valores de los parámetros 1, P4J, P'l/J y mB (o a y (3). Por esta razón haremos un análisis a fin de obtener los valores de P4J y P'l/J (o en forma equivalente, de las derivadas de los ángulos en t = O) que hacen posible una precesión regular. Hallemos las condiciones que determinan el movimiento de precesión regular. Como se vio anteriormente, para determinar los límites en el movimiento de () hay que resolver la ecuación (3.4.5) con u = cos ():
f(u) =O
con f(u) =(a- bu)2
- (1- u2) (e+ 2w5 u)
Queremos movimientos en los que () es constante en todo momento e igual a su valor inicial ()0 . La ecuación anterior deberá tener una raíz doble en el punto u0 = cos ()0 , lo cual se refleja en las condiciones:
f(uo) =O
dfi -o dv, uo
(3.8.4)
Estas condiciones están mostradas en la figura 3.14 que es un caso particular de la figura 3.5. Teniendo en cuenta la definición de f(u) obtenemos:
2 (a- bv.0 ) 2
a+ 2w0 uo = 2 1- u0
(3.8.5)
w2 = uo (a + 2w5 uo) _ b (a - b uo) 0 1-u5 1-u5
(3.8.6)
Las dos ecuaciones anteriores pueden emplearse para encontrar una ecuación para ~ (en función del valor conocido ()0 ). En efecto, este valor es constante ya que sólo depende de () (que a su vez es constante para la precesión regular) y de otras constantes de movimiento
(P4J Y P'l/J)·
~ = P4J - P'l/J cos () 1 sen2 ()
a- buo =
1-u5
u
Figura 3.11: Forma de f para la precesión regular.
49
(3.8.7)

Combinando las ecuaciones (3.8.5), (3.8.6) y (3.8.7) se llega a:
"2 . 2 u0 <P - b <P = w0
que es una ecuación cuadrática para </J. Esta ecuación tiene evidentemente dos raíces dadas por:
(en el resultado anterior se ha tenido en cuenta que 11,0 = cos Oo). Ya que ~ = w0 d</J / dT podemos escribir el resultado anterior en forma adimensional como:
d</J 1 - = e (¡3 ± J ¡32 + 4 cos Oo) dT 2cos o
(3.8.8)
Esta solución introduce directamente una restricción para las condiciones iniciales. En efecto, la cantidad subradical en la ecuación (3.8.8) no puede ser negativa. Si 00 es menor que 1r /2 no hay restricciones en el valor de ¡3 (y consecuentemente en el de p..¡;), pero cuando 00 es mayor que 1r /2, ¡3 debe ser tal que:
¡32 coseo > -- 4 (3.8.9)
De esta forma quedan determinadas las condiciones iniciales necesarias para la precesión regular. Empezamos dando valores para 0(0) = 00 y ¡3, compatibles con el hecho de que ~sea real. Una vez determinado d</J/dT queda a su vez establecido el valor de a según la ecuación (3.3.4c) que aquí escribimos en una forma ligeramente distinta:
2 d</J a= sen Oo dT + ¡3 cos00 (3.8.10)
El valor de Jo (O) queda establecido de la relación Jo = dO/ dT, que en este caso resulta en Jo(O) =O. Las variables <P y '!jJ son cíclicas así que sus valores iniciales pueden establecerse en forma arbitraria. En las figura siguiente se muestran las soluciones de (3.3.4) en el caso estacionario para 00 = 60° y ¡3 = 2, O. El valor de a se determinan de la ecuación (3.8.10). Mostramos los resultados tomando sólo la solución correspondientes a:
d</J 1 -d = e (¡3 + J ¡32 + 4 cos 00 )
T 2cos o
en tanto que los valores de iniciales de <P y '1/J son iguales ambos a O. De la figura 3.12 se corroboran los resultados previstos, ya que se observa que J0 (t) =O y O(t) es constante e igual a su valor inicial. Las gráficas de <jJ y 7f muestran además que éstas son líneas rectas, es decir que en este caso se tiene que <P y 'ljJ son constantes.
50

't
Figura 3.12: Dependencia de las variables canónicas en función del tiempo para el caso estacionario. Como se observó en la figura 3.10, la característica de este tipo de movimiento es que Jo y() son constantes, mientras que 4> y '1/J son funciones lineales del tiempo.
En la figura 3.13 se han graficado las trayectorias de un punto en el eje de simetría de la espira ubicado a una distancia unitaria del centro, para diferentes valores de a y (3 en el rép;imen estacionario. Ya que en la precesión regular se tiene que 8 es constante, es obvio que estas trayectorias son circunferencias paralelas al plano XY, como se observa en la figura 3.18 (estas gráficas se hicieron para 80 = 20°, 45° y 80° y (3 = 2, O).
Queda re::;olver la cue::;tión acerca de ::;i la prece::;ión regular es e::;table frente a pequeñas variaciones en las condiciones iniciales. Para esto notemos que de la ecuación de energía adimensional (3.3.5) y de (3.3.4b), e introduciendo la notación v = d8/dT, se tiene que:
v2 (32 (a - (3 cos 8? 2 +-¡- + 2sen28 - cos8 =Ea (3.8.11)
Podemos definir, de manera semejante a como se definió U(B) en la sección 3.4, la siguiente función adirnensional:
F(8) = (32 (a - (3 cos 8)2 _
8 4 + 2sen28 cos
con lo cual (3.8.11) se escribe como [9]:
'V2
2 + F'(8) = Ra
lo que muestra a v corno función de O solamente:
51
(3.8.12)

La estabilidad del movimiento estacionario de la espira puede estudiarse mediante el análisis del plano e - v, obtenido de la ecuación (3.8.12) para diferentes valores de Ea· Observemos que de (3.3.4a) y (3.3.4b) se tiene:
donde hemos definido:
dv = g(O) dT
1 g(O) = --"3e [(o?+ (32
) cosO- (1 + cos2 8) a(3]- senO sen
0.9
0.7
0.5
0.3
e0=20 --60=45 -------6o=80 ··------·
(3.8.13)
Figura 3.13: Movimiento del eje de simetría de la espira circular durante el movimiento estacionario. Como es de suponerse, al mantenerse constante la variable (), el eje de la espira se mueve sobre una superficie cónica.
de aquí fácilmente se llega a la relación:
dv g(O) -
dO v(O) (3.8.14)
La relación anterior nos da información cualitativa para construir los diagramas 8 - v. Se presentan varias situaciones. Si g = O pero v =/= O se tiene que la curva posee una pendiente horizontal; si g =/= O y u = O (lo que se consigue al resolver F(O) = Ea), la curva posee pendiente vertical en dicho punto; y finalmente, si g = u = O, la pendiente es indeterminada y nos encontramos frente a un punto singular. Con estas consideraciones, las curvas en el plano 8-v para el caso a 2 =/= (32 (que es el único caso que posee movimientos
52

oscilatorios) son como se muestran en la figura 3.14. De aquí se concluye que el movimiento estacionario en la espira circular es estable.
Las cuvas cerradas obtenidas en la figura 3.14 son típicas de los movimientos oscilatorios estables. Esto puede verificarse numéricamente hallando soluciones para condiciones iniciales muy próximas a la solución en equilibrio. En las figuras 3.15 y 3.16 se hace esto usando la solución estable con 80 = 50° y (3 = 2. Se observa que la separación respecto de la solución estable en cada caso es muy pequeña. En todos los casos la solución en fo se ha mantenido igual a cero y sólo se ha cambiado la condición inicial en B, que se muestra en cada gráfica.
F(O)
u
Figura 3.14: Análisis de la estabilidad de la solución estacionaria en la espira circular.
53

0.02
0.01
-0.01
-0.02
o 2
0.876
e o.872
0.868 1-············
o 2
4 6
4 6
e0=50,0 -e0=50,1°e =502°-,
8
e0=50,0 -e0=50,1°e =50,2°-
8
10
10
Figura 3.15: Dependencia de fe y () en función del tiempo. Sólo la solución para Oo = 50,0° es estacionaria (con c/Jo = 1/Jo =O y (3 = 2, 0). En los demás casos se han mantenido todas las condiciones iniciales (y el valor de (3) excepto en Oo, cuyo valor se muestra en cada caso. Puede observarse que las soluciones obtenidas se desvían ligeramente de la solución estacionaria.
54

0.03 ,--------,---------¡:¡::===::;;;;;===::;-¡ e0=50,0 • 80=50,1°e0=50,2°e0=50,30-e =50,4°-
0.015
-0.015
-0.03 .___ _________ ...__ _________ _.__ ______ __.
0.864 0.872 0.88
e
Figura 3.16: Diagrama de fases e- fe. En todos los casos se tiene que fe(O) =O, a= 3, 37 y fJ = 2. La solución con e0 = 50° es estacionaria (su diagrama de fases se reduce a un punto). Las demás soluciones se diferencia de la primera en pequeñas variaciones de la condición inicial en e. Como era de esperarse, estas soluciones se separan ligeramente de la estacionaria.
3.9. Exponentes de Lyapunov
Finalizamos este capítulo discutiendo algunas nociones del movimiento caótico, que serán usadas más adelante en el estudio de la espira elíptica, además de la espira circular. Como ya ~e mencionó anteriormente, en el ca~o de la e~pira circular en un campo magnético homogéneo disponemos de tantas integrales de movimiento como grados de libertad, lo cual nos lleva a un sistema integrable (al menos mediante cuadraturas) según el teorema de Liouville. En el caso que se tenga menos constantes de movimiento que grados de libertad no es posible una integración analítica del sistema y éste debe resolverse numéricamente. Decimos que en este caso el sistema es no integrable. Los sistemas no integrables pueden presentar movimientos de dos tipos fundamentalmente: regulares y caóticos, en tanto que los integrables sólo presentan movimiento regulares. Ambos tipos de movimientos se diferencia por sus comportamientos respecto de pequeñas variaciones en las condiciones iniciales.
En los movimientos regulares, dos soluciones con condiciones iniciales muy próximas, ~e mantendrán próximas en instante¡; poí:iterioreí:i ( ~ decir, ~on ~oludoneí:i eí:itables). Por su parte los movimientos caóticos se caracteri7.an por que las soluciones que parten de
55

condiciones iniciales muy próximas rápidamente divergen, de modo que dos soluciones que empiezan en puntos muy próximos del espacio de fases pueden resultar totalmente distintas. El movimiento caótico puede estudiarse mediante los llamados indicadores de caos, siendo los exponentes de Lyapunov uno de los más conocidos.
Para estudiar los exponentes de Lyapunov, escribamos el sistema (3.2.6) en la forma compacta:
(3.9.1)
donde (xl, X2, X3, x4) = (Po, e, c/J, '1/J) y los diferentes Fi representan las funciones que definen el sistema de ecuaciones. De acuerdo al teorema de existencia y unicidad, al fijar las condiciones iniciales x 0 en el diagrama de fases, éstas determinan una única solución (que puede representarse como una curva en el espacio de fases partiendo desde la condición inicial xo). Una condición inicial ligeramente distinta de la anterior, x0 + d, generará a su vez otra trayectoria (solución).
xo+8
Figura 3.17: Separación de las soluciones en el espacio de fases.
Llamemos x8(t) y x(t) a las soluciones en un instante t con las condiciones iniciales x 0 + d y x 0 respectivamente. Queremos estudiar la magnitud en la cual estas soluciones se separan durante la evolución del sistema. Para esto, se define la distancia D<>(t) en el espacio de fases:
Esta función mide el grado de divergencia (o convergencia) de estas dos soluciones. Los exponentes de Lyapunov son indicadores de la rapidez a la cual estas soluciones se separan durante su evolución temporal. De la definición de D<>(t) es obvio que:
siendo 8 = llóll, la separación en el espacio de fases de las condiciones iniciales. Una primera definición de los exponentes de Lyapunov (que denotaremos por A.) es tal que se cumple:
(3.9.2)
56

De la relación anterior se deduce que D>. ( t) crece exponencialmente si .A es positivo, decrece exponencialmente si es negativo y se mantiene constante si es cero. Para cuantificar la rapidez con la que las soluciones se separan en el diagrama de fases se define una tasa de separación promedio O"N(x, t5) luego de N iteraciones de la siguiente manera:
1 (D8(t)) O"N(x, t5) = N ln D.,( o) (3.9.3)
donde el tiempo t corresponde a la N-ésima iteración. Los exponentes de Lyapunov se calculan, de una manera más rigurosa, a partir de la definición de O"N(x, t5) en el límite de condiciones iniciales infinitamente próximas y grandes iteraciones:
.A = lím lím O"N(x, t5) N-+oo 8-+0
(3.9.4)
En este trabajo no calcularemos los exponentes de Lyapunov para la espira circular, ya que los cálculos y algoritmos involucrados son muy elaborados y rebasan los alcances de este trabajo. En lugar de ello daremos algunos argumentos para establecer que el movimiento en este tipo de espira no es caótico. Debemos mencionar que los argumentos aquí usados son los mismos empleados al analizar el caos en la peonza asimétrica pesada (trompo asimétrico), tal y como se plantean en la referencia [5].
Para evaluar la regularidad del movimiento que nos concierne resolvemos las ecuaciones dinámicas (3.3.4) para condiciones iniciales muy próximas en el espacio de fases, y observaremos la evolución de las diferencias entre ambas soluciones para cada coordenada xi, a las que llamaremos 8xi (en realidad, observaremos la evolución del logaritmo de estos valores). En general, las diferencias en las soluciones dependerá de la dirección en la que se produce la variación de las condiciones iniciales. Para esto consideremos las siguientes condiciones iniciales y parámetros:
fe(O) =O, 56 0(0) = 1, 24
a= 3,2
4>(0) = 1, 43
(3 = 2, 4
'!j;(O) = 1, 43
Consideremos además una variación en las condiciones iniciales sólo en la dirección de f 8:
6fe(O) = 0,001 60(0) =O, O
las figuras adjuntas muestran el comportamiento de ln \6fe\, ln \60\ en función del tiempo adimensional T.
En todas estas gráficas se observa que el logaritmo de las variaciones en cada variable crece pero en forma que asemeja bastante a una función logarítmica. Esto es característico de de los movimientos regulares, en los que la separación entre las soluciones correspondiente a condiciones iniciales muy próximas crece en forma lineal a lo mucho. Para hacer una estimación del exponente de Lyapunov vamos a hacer una gráfica de O"N (ecuación (3.9.3)) teniendo en cuenta que:
El exponente de Lyapunov puede estimarse de la gráfica correspondiente. En este caso se observa que O"N tiende a cero.
57

-6
a:> r.o -12 e
z \:)
-14
-3
-6 ······················!············ ........................... .¡ .................................... ··>················· ........... , ....................... .
·¡ a=3,2 ~~2,4 -1 -9 .............................. , ........................... , .... :·+········· .................. ) .................................. " ............................... , .. .
o 20 40 60 80 100 't
Figura 3.18: Análisis del caos en la espira circular. En la gráfica lniJOI observamos que la tendencia creciente se asemeja mucho a una función logarítmica, lo cual es típico de los movimientos no caóticos. Esto se corrobora al observar la gráfica de aN. Se observa que tiende a un límite muy cercano a cero, incluso ligeramente debajo de él.
58

Capítulo 4
Espira elíptica en un campo magnético uniforme
Trataremos ahora el caso de una espira plana elíptica. Aquí veremos que existen ciertas dificultades que no aparecían cuando se analizaba la espira circular. Por ejemplo, las ecuaciones de movimiento se hacen particularmente complicadas debido a la falta de simetría en los momentos de inercia. Por otra parte, como en todo cuerpo rígido, es posible encontrar un sistema de tres ejes principales de inercia mutuamente perpendiculares. Para una espira elíptica, uno de estos ejes está a lo largo del eje mayor, otro a lo largo del eje menor y el tercero es perpendicular a ellos y pasa por el centro de la elipse. Esto no es dificil de demostrar y en efecto esta demostración se hará en la siguiente sección. En este capítulo también se considerará el centro de masa como origen de los sistemas de coordenadas inercial y fijo al cuerpo. Hallaremos las ecuaciones de movimiento de Hamilton y las resolveremos numéricamente para ciertas condiciones iniciales. Luego estudiaremos la posibilidad de que el sistema en cuestión presente movimiento caótico.
Se ha dicho ya que en esta parte usaremos las ecuaciones canónicas de Hamilton, sin embargo, es ilustrativo mostrar las ecuaciones obtenidas mediante las ecuaciones de Euler del cuerpo rígido. Las ecuaciones para las componentes de la velocidad angular y los ángulos de Euler de la elipse se obtienen de la misma manera que en el caso de la espira circular. Es decir, si los momentos principales de inercia son 11 , ! 2 e h obtenemos:
Wl = -W2W3 + TI/ h w2 = wlw3 + 72/12
h -12 w3 = w1w2
h
Y las componentes del toque tienen la misma expresión que en el caso circular1:
T1 = -mB senO cos 'ljJ
T2 = mB senO sen 'ljJ
73 =o
(4.0.1)
1Hagamos notar aquí que mientras que en el caso circular, el momento dipolar de la espira era simplemente m = 1r R 2 i, en el caso elíptico debemos reemplazar R 2 por a b, siendo a y b los ejes de la espira.
59

4.1. Momentos de inercia en una espira elíptica.
Consideraremos una espira elíptica homogénea, de masa total M y de semiejes mayor y menor a y b respectivamente. En primer lugar consideremos un sistema de ejes ortogonales donde dos de estos ejes son paralelos al plano de la elipse y pasan por su centro: cada uno a lo largo de cada eje principal de la elipse. El tercer eje es perpendicular al plano de la elipse y pasa por su centro.
Las expresiones para los elementos de la matriz de inercia pueden obtenerse usando el sistema de ejes fijos a la espira, como el mostrado en la figura 4.1. Éstas son:
In= L (x~ + x~) dm
I22 = L (xi + x~) dm
J33 = L (xi + x~) dm
h2 = J21 = - L x1 x2 dm
h3 = l32 = - L x2 X3 dm
h1 = J13 = - L X¡ x3 dm
z
Figura 4.1: Parámetros de la elipse (a> b).
60
j
y

Donde C representa la curva de la elipse y la diferencial de masa es dm = A dl. Es evidente, de las fórmulas anteriores, que para un cuerpo plano contenido en el plano X1X2
se cumple que h 3 = 123 = O. Entonces, para concluir que el sistema de ejes propuesto es un sistema de ejes principales de inercia habría que demostrar que 112 = O. En efecto, escojamos la parametrización:
El diferencial de arco viene dado por:
X= a COSO
y= bsene
pero usando (4.1.la) y (4.1.lb) se obtiene:
ds = vi a2sen20 + b2 cos2 (}dO
= av'l- k2 cos2 0d(J
b b
Figura 4.2: Parámetros de la elipse (a> b).
(4.1.la)
(4.1.lb)
(4.1.2)
Donde hemos definido las cantidades e? = a2 - b2, (recordar que a > b) y k = e j a < l.
Tenemos entonces:
Siendo A la densidad lineal de masa, que consideraremos homogénea. La expresión anterior puede desarrollarse separándola en dos intervalos de integración:
112 = -ab2 A [ ¡1r dO senO cos (}vil - k2 cos2 (} + 12
1r dO senO cos (}vil - k2 cos2 e]
y haciendo el cambio x = cos fJ:
112 = -ab2 A [ 1: dx xvil - k2x2 - 1: dx xvil - k2x2
]
61

Es evidente que ambas integrales se anulan por ser integrales de funciones impares en el intervalo [ -1, 1]. Por lo tanto, todos los términos no diagonales de la matriz de inercia se anulan, con lo cual tenemos:
I = [ I~l I~2 ~ ] o o h3
Si hacemos z = O en las expresiones para las componentes no nulas de la matriz anterior nos queda la relación:
I33 =In+ h2
Que es aplicable en general a cuerpos planos. Las expresiones para cada una de estas componentes queda como:
]¡ = In = 2)..b2 1"' dO sen20 J a2sen20 + b2 cos2 O
I2 = I22 = 2>.a2 1"' dO cos20 J a2sen20 + b2 cos2 O
(4.1.3)
(4.1.4)
Las integrales que aparecen en estas expresiones no son elementales por lo que deben resolverse numéricamente. Sin embargo, podemos simplificar las relaciones anteriores a fin de hacerlas más prácticas para el tratamiento numérico. Haciendo los cambios de variables x =cosO para]¡ y x =senO para I2 obtenemos:
4.2.
I1 = 4>.ab2 11
dx J(l- x2)(1- k2x2),
h = 4>.ba2 11
dx J(l- x2)(1 + q2x 2 ),
Función de Hamilton
k= cja (4.1.5)
q= cjb (4.1.6)
Siguiendo lo hecho para el caso de la espira circular, vamos a hallar las ecuaciones de movimiento de Hamilton para la espira elíptica, ya que además deseamos estudiar el espacio de fases del sistema. Escribiremos los momentos de inercia como:
I¡ = I I2=I(1+E)
I3=I(2+t)
(recordemos que I 3 = I 1 + I2). La función de Lagrange es de la forma:
L = Ec- U
(4.2.1a)
(4.2.1b)
(4.2.lc)
siendo U la energía potencial de la espira en el campo magnético homogéneo. Tomando el centro de masa de la espira como origen de los sistemas de referencia inercial y fijo a la espira se tiene:
(4.2.2)
62

donde hay que señalar que las componentes wk dependen de los ángulos de Euler y de sus respectivas derivadas temporales, de modo tal que L es función de las coordenadas y velocidades generalizadas. Los momentos generalizados se obtienen de la expresión anterior, por lo tanto:
aL P<~> = a~
aL P'1f;=-.
a'!jJ
(4.2.3a)
(4.2.3b)
(4.2.3c)
en las ecuaciones anteriores usamos las expresiones siguientes (que se deducen de las ecuaciones (3.1.3) de la página 28):
aw1 -. =cos'!jJ a e aw1 , -. = senOseni¡l a<jJ
aw_1 = 0 a'!jJ
aw2 -. = -sen'l/J a e aw2 -. = senOcos'ljJ a<jJ
aw_2 = 0 a'!jJ
y obtenemos ecuaciones para los momentos generalizados:
Po = I w1 cos '1/J ...:.. I ( 1 + E) w2 sen'l/J
aw_3 = 0 a e aw3 -. =cose a<jJ aw3 -. =1 8'1/J
P<t> = I w1 senO sen'l/J + I (1 +E) w2 senO cos '1/J + I (2 +E) w3 cos (J
P'1f; = I ( 2 + E) W3
(4.2.4a)
(4.2.4b)
( 4.2.4c)
Para obtener los momentos generalizados en términos de coordenadas y velocidades generalizadas reemplazamos las ecuaciones (3.1.3) para las componentes de la velocidad angular en las expresiones anteriores para así obtener finalmente:
p; = é (1 + E sen2 'l/J) - E~ senO sem/J cos'!jJ
P<t> = -é E senO sen'l/J cos'!jJ + ~ ( 1 + (1 + E) cos2 e+ E sen28 cos2 'ljJ) I
+ (2 +E),¡; cose
(4.2.5a)
(4.2.5b)
( 4.2.5c)
Evidentemente, para escribir la función de Hamilton necesitamos la derivadas temporales é, ~ y ,j; en función de los momentos generalizados y de las coordenadas generalizadas.
63

Esto puede lograrse despejando las variables correspondientes de las ecuaciones ( 4.2.5). Luego de un cálculo directo, pero engorroso, obtenemos:
(). Po [1
E2 sen2 'l/J cos2 'ljJ J E sen'lj; cos 'ljJ = + + (P,p- cos()p,¡;) /(1 + Esen2'lj;) 1 +E I (1 +E) sen()
(4.2.6a)
. 1 2 1J =
1 ( 1 + E) sen 2 () [E sen() sen 'ljJ cos 'ljJ Po + ( 1 + E sen 'ljJ) (p <P - cos () p,¡;)] (4.2.6b)
· P,¡; cos () 'ljJ = ( ) - I( ) 2 () [Esen()sen'lj;cos'lj;p0
I 2 +E 1 +E sen
+ (1 + Esen2'lj;)(P,p- cos()p,¡;)] ( 4.2.6c)
De la ecuación ( 4.2.2) vemos que necesitamos las componentes wk en función de los momentos y coordenadas, para luego reemplazarlos en la función de Lagrange y obtener así la función de Hamilton. Esto se consigue de las ecuaciones (4.2.4) despejando los wk:
1 w1 = -
1 () (sen() cos 'ljJ Po+ sen'lj; P,p- sen'lj; cos () p,¡;)
sen 1
w2 = ( ) () ( - sen() sen'lj; Po + cos'lj; P,p - cos'lj; cos () P,¡;) J 1 +E sen .
p,¡;
De esta forma, la definición de la función de Hamilton resulta ser:
H = iJ Po + ~ P,p + ~ P,¡; - L
y reemplazando los resultados obtenidos en (4.2.6) y (4.2.7) en H otenemos:
P~ 2 p~ E sem/J cos 'ljJ H = 21 (2 +E) + (1 +Ecos 'l/J) 21 (1 +E) + /(1 +E) sen() Po(P,p- cos () p,¡;)
(4.2.7a)
(4.2.7b)
(4.2.7c)
(1 + Esen2'lj;) 2 + 21
( ) 2 () (p,p- cos () p,¡;) - mB cos () 1+E sen
(4.2.8)
Resulta claro que la ecuación anterior se reduce a (3.2.5) cuando E= O (espira circular). La función H no contiene a 1;, por lo que P,p seguirá siendo una constante de movimiento, como en el caso circular. Sin embargo, vemos que ahora existe una dependencia con 'ljJ ausente en el caso de simetría circular. El origen de estas diferencias pueden deducirse de las diferentes simetrías en las espiras elíptica y circular. La función de Hamilton de la espira circular posee una simetría frente a rotaciones en torno al eje e3 (es decir, rotaciones del ángulo '1/J), que deriva de su simetría circular. Esta invariacia se destruye en tanto se pasa a la espira elíptica. Sin embargo, existe una simetría presente en ambos casos, y es la rotación en torno a la dirección k, consecuencia de que el campo magnético (y la energía potencial magnética) posee simetría azimutal.
64

4.3. Ecuaciones canónicas de Hamilton
De la función de Hamilton ( 4.2.8) y de las ecuaciones canónicas de Hamilton:
. oHe Po=---fJ(} . oHe
P,p = -fJcp . oHe P'I/J=-
o'lj;
se obtienen las respectivas ecuaciones dinámicas para la espira elíptica:
-mEsen(}
P,p =o P'I/J = ( E) 2 (} [-sen(} cos 2'1/J Po(P,p - cos (} P'I/J)
I 1 +E sen
+ sen'!j; cos '1/J (p~ sen2(} - (P,p - cos (} P1/J) 2
)]
(}. p0 [ t:2 sen2'!j; cos2 '1/J J E sen'!j; cos '1/J = 1 + + (p,p- cos(}p'I/J)
J(1+t:sen2'!j;) 1+E J(1+E)sen(} . 1 2
c/J = 1
( 1
+ t:) sen 2 (} [E sen(} sen '1/J cos '1/J Po + ( 1 + E sen '1/J) (p ,p - cos (} P'I/J)]
· P'I/J cos (} '1/J = ( ) - ( ) 2 (} [Esen(}sen'!j;cos'!j;p0 I 2 + E I 1 + E sen
+ (1 + t:sen2'!j;)(p,p- cos(}ptb)]
(4.3.1a)
(4.3.1b)
(4.3.1c)
(4.3.1d)
( 4.3.1e)
(4.3.1f)
Del conjunto de ecuaciones anteriores se nota claramente que si E = O, se tiene que P'I/J = O. En principio, el espacio de fases del sistema formado por la espira circular es de dimensión seis, pero en virtud de que cp es una coordenada cíclica, podemos reducirlo a uno de dimensión cuatro (la dependencia en cp no está presente en la función de Hamilton y por ello en ninguna de las ecuaciones canónicas). De las ecuaciones (4.3.1) se observa esto ya que las ecuaciones diferenciales para p,p, P'I/J, (}y '1/J son autosuficientes, en el sentido que no involucran a la variable cp. U na vez resuelto este sistema de cuatro ecuaciones diferenciales (para ciertas condiciones iniciales), es posible integrar la ecuación para cp mediante la relación:
cp(t) = r dz ~(z) + cp(to) lto
ya que ~(t) está determinado una vez que se han hallado las soluciones para Jo, J'I/J, (}y '1/J.
Además, ya que el sistema es conservativo, las soluciones deben hallarse en una superficie (estrictamente hablando una hipersuperficie) del espacio de fases, dada por la ecuación:
(4.3.2)
donde se ha tenido en cuenta que la función de Hamilton (4.2.8) no depende de cp. En esta ecuación podemos depejar una de las variables, digamos Jo, en función de las otras tres.
65

La gráfica de esta función constituye entonces una hipersuperficie de dimensión tres. Para resolver el sistema ( 4.3.1) vamos a definir los momentos generalizados adimensionales de un modo similar a como se hizo en el caso circular (con w5 = mB / I):
y un tiempo adimensional:
Jo= Po Iwo
J, - PV; 1/J- lwo
T = wot
(4.3.3)
además, ya que P<P es constante definimos el parámetro a similar al definido para la espira circular, es decir:
P<P a=-lwo
de esta forma, reemplazando en (4.3.1), resultan las siguientes ecuaciones adimensionales:
dfo (acosO-fV;) (1+Esen2'1j;) -d· = ( ) 20 [Efosen'lj; cos'lj; + e (a- !V; cosO)]- senO
T 1 +E sen sen df E _:!!_ = ( ) 20 [- f 0(a- j.,¡1 cosO) senO cos 2'1/J dT 1 +E sen
+ sen'lj; cos 'lj; U't sen20- (a - !11; cos 0)2) J
dO Jo [ E2
sen2
'1j; cos2
'lj;J E sen'lj; cos '1/J ( f O) -= 1+ + a- 11;COS dT (1 + ESen2'1j;) 1 +E (1 +E) senO
dcp ( ~ 20 [ EfosenOsen'lj;cos'lj; + (1 + t:sen2'1j;)(a- !V; cose) l dT 1 +E sen d'lj; !V; cose
( ) ( ) 20 [t:fosenOsen'lj;cos'lj; dT 2 + E 1 + E sen
+ (1 + t:sen2'!f;)(a- .f11; cosO)]
( 4.3.4a)
(4.3.4b)
(4.3.4c)
(4.3.4d)
(4.3.4e)
Más adelante será útil tener una expresión para la energía cinética adimensional, por ello escribamos una expresión para la energía adimensional Ea, que viene dada por:
4.4.
E Ea= -I 2
Wo
.f~ 2 .fJ E sen'lj; cos 'lj; ( ) + (1 +ECOS '!f;) 2(1 ) + ( ) O fo(a- fV;cos0) 2 2+t: +E 1+E sen
(1+t:sen2'!f;) 2 + ( ) 20 (a- .fV;cosO) -cosO 21+t: sen
(4.3.5)
Soluciones numéricas en el movimiento de la espira elíptica.
En el caso de la espira circular teníamos dos momentos generalizados constantes (P<P y PV;), provenientes de la simetría de rotación de la espira en tomo al k (del sistema de referencia inercial) y al eje de simetría e3 . Ahora sólo disponemos de P<P (que interviene en las ecuaciones dinámicas como a), ya que la asimetría elíptica destruye la invariancia de rotación en torno al eje e3 ; pero tenemos además un parámetro adicional E, que nos
66

sirve como un indicador del grado de asimetría de la espira. En efecto, recordemos que teníamos:
J1 = I f2=f(l+E)
Es de esperar que cuando IEI « 1, los resultados obtenidos sean efectivamente cercanos a los de espira circular. Mas adelante veremos que esto es así efectivamente. Es más, veremos que adicionalmente al parámetro E, las soluciones de (4.3.4) quedan determinadas por el valor del cociente entre la energía potencial y cinética iniciales, al que llamaremos ~ [5]:
o en forma adimensional: ~ = _ cosOo
E;((O)
donde E,¿(o) representa la energía cinética adimensional. La definición anterior puede ser escrita de otro modo si tenemos en cuenta que Ea= - cos 00 + E¿(o). Así obtenemos:
~ = _ cos00
Ea+ cosO
Con la definición de ~ se puede hablar ahora de dos casos en el movimiento de la espira: 1~1 « 1 (conocido usualmente como espira rápida ya que en este caso Ec(O) » IU(O)I) y 1~1 > l. Analizaremos ambos casos cuando la asimetría de la espira sea insignificante (E « 1), y cuando ésta ya no lo sea pero se mantenga ligeramente menor que 1 (E ;S 1). Hay que señalar que el valor de ~ depende no sólo de E sino también de a y de las condiciones iniciales (salvo la condición en </J, que como ya se ha visto no interviene en la función de Hamilton, y por ello tampoco en las ecuaciones canónicas).
Para resolver el sistema ( 4.3.4) vamos a usar el programa EspiraEliptica.py mostrado en el apéndice, que emplea a su vez el módulo ModuloElipse.py, también mostrado en el apéndice (todos estos programas están escritos en el lenguaje de programación Python 3.2). De acuerdo a las magnitudes de E y~ vemos que se presentan diferentes casos:
4.4.1. Caso 1: E<< 1 y 1~1 > 1
Analicemos el caso en que la asimetría de la espira es pequeña, es decir cuando E << l. Es de esperar que en este caso se obtengan resultados similares a los obtenidos al analizar la espira circular, es decir, movimiento periódico en p0 (o equivalentemente en Jo) y e, así también como un valor constante para P..p (o f ..p). Además de la consideración de E « 1, asumiremos también la condición de espira lenta, es decir que se cumple Ec(O) < U(O), o recordando la definición de ~:
1~1 > 1
Vamos a estudiar las soluciones de ( 4.3.4) primero para intervalos de r de hasta 50, lo que equivale a intervalos de tiempo de hasta 50/wo (recordar que r = W 0 t). Ya que buscamos 1~1 > 1, debemos asegurar que Ec(O) se menor que cos 00 . Esto puede asegurarse, de entre otras maneras, poniendo a pequeño y haciendo fo(O) y f..p(O) también pequeños.
67

Por ejemplo, <.:OH las wndiciones iniciales y parámetros siguientes (los ángulos se dan en radianes con sus respectivos valores en sexagesimales entre paréntesis):
Jo= 0,18 J,¡; = 0,19 (} = 1,20 (68, 8°)
E= 0, 001
se obtiene un valor de 1~1 igual a 14,06.
Observaciones:
<P = 'lj; = 1,43 (81, 9°)
De las figuras 4.3 y 4.4 se observa que Jo, O y J,¡; presentan un comportamiento periódico, al menos en el intervalo de tiempo mostrado. Sin embargo, hay una notoria diferencia entre los períodos de Jo y O en comparación con el de J..¡,. Esto se hace visible en la figura 4.3 donde se muestran gráficas comparativas de estas funciones (en todos los casos se han respetado las escalas de cada solución).
1.5.-----------r-----------r-----------r-----------r----------.
0.5
o
-0.5
-1
-1.5 '------------'----------'------------'---------'-----------' o 2 4 6 8 10
Figura 4.3: Gráficas de fe,(} y f,p en el caso E= 0,001 y 1~1 = 14,06 (caso 1). fe y(} varían apreciablemente mientras que f ,¡; se mantiene casi constante. En realidad, se mostrará que f ,¡; también tiene un carácter oscilatorio pero de período mucho mayor al de(} y fe·
De estas gráficas se observa que J..¡, es fundamentalmente constante en un intervalo de varios períodos de Jo y O, muy similar a lo que ocurría con la espira circular. Esto también se observa de la figura 4.4, donde se muestra que f,p presenta apenas poco más de dos oscilaciones completas para un intervalo de entre T =O y T = 1000. El valor del período
68

en f,p está relacionado fundamentalmente con el parámetro a. En términos generales, puede afirmarse que el período de f,p disminuye al aumentar a (aunque manteniéndonos dentro de la condición J.ó 1 > 1). Esto indica que el movimiento más cercano al de la espira circular se presenta con a pequeño.
Figura 4.4: f,p para E= O, 001 y 1~1 = 14, 06.
Estos resultados también pueden deducirse de la observación del diagrama de fases e- fe (figura 4.5), en donde se muestra que la gráfica está estrechamente encerrada entre dos curvas cerradas muy próximas entre sí, lo cual como se vio anteriormente, es un resultado muy cercano al visto en la espira circular. Por esta razón este tipo de movimien~o puede denominarse cuasiperiódico. Más adelante veremos que en otras situaciones la gráfica e - fe se aleja bastante de este tipo de comportamiento.
Para finalizar debemos señalar que la condición l.ól > 1 puede tratarse también desde el punto de vista de la magnitud del campo magnético externo, ya que esta condición se cumple cuando la magnitud del campo magnético externo es muy grande en comparación con el cociente entre la energía cinética inicial y el momento magnético de la espira.
69

0.8
t9 o
-0.8
o 0.4 0.8 1.2
e Figura 4.5: Diagrama de fases()- Jo para el caso 1, con E= 0,001 y 1..6.1 = 14,06 (caso 1). La desviación del caso circular (curva cerrada) es apenas visible.
Las gráficas de cp y '1/J son monótonas, por lo que no las mostraremos hasta la parte final, cuando analicemos el último caso.
4.4.2. Caso 2: E<< 1 y 1~1 << 1
Veamos ahora el caso en que la espira es aún sólo ligeramente diferente de una circunferencia (E« 1) pero en la que ahora se tiene ló.l « 1, lo cual es equivalente a afirmar que Ec(O) » U(O) (condición de espira rápida). Para observar estas diferencias veremos que basta con analizar las gráficas de las variables canónicas para tiempos no muy grandes respecto de 1/w0 . Para esto consideremos las siguientes condiciones iniciales y parámetros:
!o= 3,18 f,p = 3, 18 (} = 1,20 (68, 8°) 1Y = '1/J = 1,43 (81, 9°)
E= 0, 001 a= 6,5
Estos valores dan como resultado ló.l =O, 015, lo cual indica una energía cinética grande en comparación con la energía potencial. Las soluciones para este caso se muestran en las figuras 4.6 y 4. 7.
Observaciones:
Las gráficas de Jo y(} siguen siendo similares al caso circular, pero vemos que f,p tiene ahora un período mucho menor al visto en el caso 1 (compárese con las figuras 4.3 y 4.4). Sin embargo, hay aún un aspecto que hace este caso muy similar a la espira circular. Para esto notemos que los valores iniciales de Jo y f,p son iguales, sin embargo Jo oscila en un
70
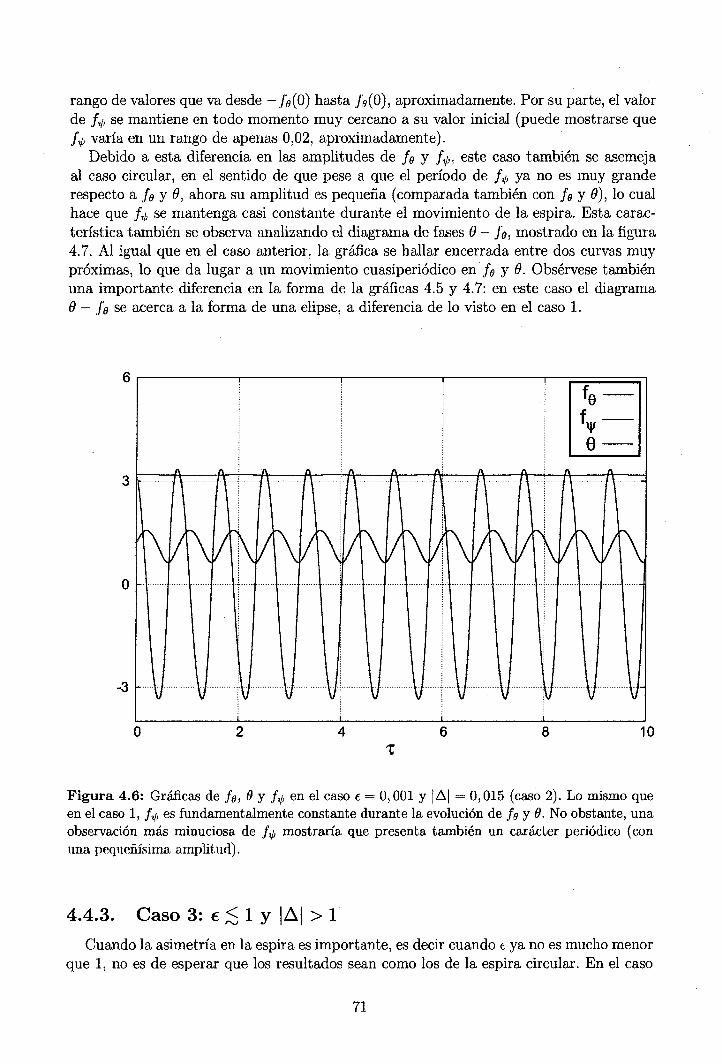
rango de valores que va desde -Io(O) hasta }6(0), aproximadamente. Por su parte, el valor de f.,¡; se mantiene en todo momento muy cercano a su valor inicial (puede mostrarse que f.p varía en un rango de apenas 0,02, aproximadamente).
Debido a esta diferencia en las amplitudes de fe y f.;,: este caso también se asemeja al caso circular, en el sentido de que pese a que el período de f.p ya no es muy grande respecto a fe y B, ahora su amplitud es pequeña (comparada también con fe y B), lo cual hace que f ,¡; se mantenga casi constante durante el movimiento de la espira. Esta característica también se observa analizando el diagrama de fases(}- fe, mostrado en la figura 4. 7. Al igual que en el caso anterior: la gráfica se hallar encerrada entre dos curvas muy próximas, lo que da lugar a un movimiento cuasiperiódico en fe y B. Obsérvese también una importante diferencia en la forma de la gráficas 4.5 y 4. 7: en este caso el diagrama (} - fe se acerca a la forma de una elipse, a diferencia de lo visto en el caso l.
6 r-----------~----------~----------~-----------r-----------,
[G=
o .................. .
-3
o 2 4 6 8 10
Figura 4.6: Gráficas de fe, (}y f.¡, en el caso f.= O, 001 y 1~1 =O, 015 (caso 2). Lo mismo que en el caso 1, f,¡, es fundamentalmente constante durante la evolución de fe y O. No obstante, una observación más minuciosa de f ,¡; mostraría que presenta también un carácter periódico (con una pequeñísima amplit.url).
4.4.3. Caso 3: E ;S 1 y 1~1 > 1
Cuando la asimetría en la espira es importante, es decir cuando t ya no es mucho menor que 1, no es de esperar que los resultados sean como los de la espira circular. En el caso
71

1.6.1 > 1 veremos que surge una nueva característica que no aparecía en los dos primeros casos 2 , y es que las soluciones en fo y O presentan ahora una modulación periódica, la cual varía al variar E. Para exhibir esto vamos a graficar las soluciones en fo y O, que es donde se manifiesta más marcadamente esta modulación.
Para estudiar la influencia del parámetro E en la modulación, vamos a presentar gráficas de fo y (} para diferentes valores de E, manteniendo el valor de .6. constante (en la condición 1.6.1 > 1). Debido a que la función de Harnilton adirnensional (4.3.5) depende de varias variables y de los dos parámetros E y a, vamos a mantener constantes los siguientes:
a =0:3
f,¡.(O) =O, 23 0(0) = 1, 20 (68, 8°) </J(O) = '1/;(0) = 1, 43 (81, 9°)
e=0,001-4
2
-4
0.6 0.8 1 1.2 1.4 1.6 e
Figura 4.7: Diagrama de fases()- fo para el caso 2 con IAI = 0,015 y f = 0,001. Nótese la diferencia en la forma en comparación con la figura 4.fí. En ambos casos el movimiento es cuasipcriódico.
Con estas cantidades fijas: la energía se convierte en una función sólo de f 0 (0) y e De la función de Hamilton adimensional (ecuación ( 4.3.5)), se observa que Ea es una función cuadrática en lo(O):
Ra = A(E) #(O)+ R(E) fo(O) + C(E) (4.4.1)
En todas las figuras siguientes el valor de .6. es -6,43. Para mantener fijo este valor necesitamos mantener constante el valor de E (ya que 00 se mantiene fijo). Esto puede lograrse
2En realirlarl, esto sí estaba presente en los casos 1 y 2, pero no era fácilmente observable rlebirlo a elevado períoclo <le f..p en el primer caso y a la pequeña amplitud del mismo en el segundo caso.
72

dando diferentes valores a E, con lo cual se obtienen los valores de los coeficientes A (E), B(E) y C(E), y con el valor establecido de Ea podemos resolver la ecuación cuadrática ( 4.4.1):
:{¡(O)= -B(E) ± JB2 (E)- 4A(E)[ C(E)- E] 0 2A(E)
(4.4.2)
Con los valores de Jo(O) así obtenidos aseguramos que el parámetro ~ se mantenga constante al variar E. Para nuestro caso se han usado los siguientes valores:
E fo(O)
0,1 0,189
0,2 0,198
0,3 0,206
0,4 0,214
0,5 0,222
Observaciones:
Los resultados obtenidos para() y Jo se muestran en las figuras 4.9 y 4.10. Se observa que la amplitud de la modulación crece con E hasta que alcanza un cierto valor máximo cuando E >=;::j O, 3, a partir de lo cual empieza a disminuir. Es decir, la asimetría de la espira no es determinante en la amplitud de las modulaciones ya que una mayor asimetría no indica necesariamente una mayor amplitud. Se observa que la modulación alcanza un máximo entre los valores 0,3 y 0,4 de E.
Esta característica es compartida por Jo y (), aunque la forma particular de la modulación es distinta en ambos casos. Mientras que en Jo la modulación en la parte superior de la función (máximos locales) como en la inferior (mínimos locales) es similar, en () tenemos que la modulación es de mayor amplitud en la parte inferior que en la superior.
En el diagrama de fases ()-Jo (página 79) también se observan estas diferencias con el movimiento circular. Estas gráficas se muestran en la figura 4.11. Recordando que en la espira circular estos diagramas eran curvas cerradas debido a la relación:
E= E(Jo, fJ)
y a que la función U(fJ) presentaba un mínimo (véase la sección 3.4 para la definición de U(fJ)). Ahora el movimiento se aleja bastante del movimiento cuasiperiódico que se encontraba en los casos 1 y 2. Para el valor de E = O, 3 (donde hallamos la máxima amplitud de las oscilaciones), vemos que el diagrama de fases llena prácticamente todo el espacio comprendido en el interior de una región limitada, por lo cual es el caso que más se aleja del movimiento periódico. En los casos E= O, 1 y E= O, 5 se observa que el movimiento es cuasiperiódico, aunque bastante alejado de los movimientos obtenidos en los casos 1 y 2.
73

ft2 ············· _l.................. . ········: -··········--·······-····+·:
0.6
o
-0.6
IE-0,1 -J 9
1.2
0.6
i l
-1.2 !-·························· ········l'··········· ............. ;......... ···················· :·················-···················+! ···················· i or--··············-·············-~:--····························-~·-················· -- +- ---·-·'·-----------1
fe 1.6
0.8
o
-0.8
o 20 40 60 80 100 o 20 6
. E 0,5 -~ 6
1.2 --
-···!······· '········-·· ··-
A V
0.6 , ............ . _v
!
-1.6 ~----·------+ ·----···········----·Í········ ---·-·····-·-+--········· --··--··-· '········--······-·········-·····-~
o 20 40 60 80 100 o 20
40 60 80 100 6
LE-0,5 -J
!V , .......... .
40 60 80 100
Figura 4.8: Se muestran las gráficas de () y fe para dos valores de E (caso 3). Para valores intermedios de E puede mostrarse que la modulación se acentúa.
En estas figuras además se observa que pese a que el valor inicial de (} en todos los casos es 68,8°, éste decae rápidamente hasta un valor pequeño (por debajo de los 0,2 radianes o 11,5°). Esto hace que la espira se coloque instantáneamente en una posición casi horizontal, con su eje casi vertical a su vez. Estos resultados pueden verse en la figura 4.10 (página 74), donde se ha graficado la trayectoria del eje de la espira al intersectarse con una esfera de radio unitario. Las diferencias con las figuras 3.8 y 3.9 son claras. Mientras que en estas últimas el movimiento estaba restringido entre dos límites bien definidos, en el caso elíptico estos límites desaparecen y el movimiento ocupa ahora toda una región de valores en (} desde cero hasta cierto valor.
74

1.6
0.8
-0.8
-1.6 1- --------------·--------- -¡ ............................ , ............................. , ............................ , .............................. ¡ ............................ ¡ ......................... -¡
1.4 e
0.8
-1.6 o 0.2 0.4 0.6 0.8 1.2 1.4 e
Figura 4.9: Diagramas de fase en Jo y(} para diferentes valores de E y 1~1 = 6,43 (caso 3). En este caso la gráfica está contenida entre dos curvas cerradas (movimiento cuasiperódico).
4.4.4. Caso 4: € ~ 1 y 1~1 << 1
Éste es el caso en que quizá resulte más dificil hallar patrones en el movimiento de la espira. En todos los casos vistos anteriormente se tenía que el período en f..p era mucho
75

mayor a los períodos en fe y () ( espedalmente en el caso 1). Esta característica nos permitía hablar de una modulación en la.c:; Rolnciones en el caso 3, ya que era justamente j,¡; quien determinaba el período de las modulaciones (al menos en los casos analizados). Sin embargo, cuando el período de j-.¡, se hace de magnitud comparable a la de fe y (), veremos que es más complicado distinguir la modulación en estas soluciones, lo que resultará en un movimiento más bien irregular. Veremos que ésta es la situación en el caso e ;S 1 y 1~1 ~l.
Figura 4.10: Trayectorias del eje de la espira para ID.I = 6,4 (caso 3).
Las gráficas en la figura 4.11 se obtuvieron con las condiciones iniciales .fe(O) = .f.p(O) = O, 34, ()(O)= 1, 20 y </>(0) = ~P(O) = 1, 43. Además los parámetros usados fueron:
E= 0,5 a=8,0
obteniéndose 1~1 = O, 010. Estos resultados muestran un comportamiento ligeramente irregular en () producto de que en este caso se cumple aproximadamente lo siguiente (donde denotamos los períodos en f 0 , ()y f,p como T(f0 ), T(()) y T(f,¡;) respectivamente):
T(f,¡;) r-.J 2T(e) "'2T(fe)
76

--l --l
4
2
o
-2
o 2 4 6 8 10 't
Figura 4.11: Gráficas de Jo, () y fl/! en-el caso E = O, 5 y 1~1 = O, 010 (caso 4). A diferencia de los casos analizados anteriormente, donde el período de .f'lf; era considerablemente mayor a los de .fo y H, cm este caso los tres períodos son del mismo orden de magnitud. Esto hace que la modulación que surge en la solución e se haga más irregular, en comparación con el caso 3.

El comportamiento irregular de e puede acentuarse teniendo en cuenta lo hallado en el caso 3 (sección 4.4.3), donde se señaló que la amplitud de las modulaciones, para un valor fijo de ~. presentaba un máximo, que en el caso particular de 1~1 = 6, 43, se hallaba cuando t se encontraba entre 0,3 y 0,4 (véase las figuras 4.9 y 4.10). Esto es claro al observar la gráfica de e cuando t = O, 32 y fo(O) = f.p(O) = 2, 34 (figura 4.12), manteniendo las demás condiciones iniciales y el parámetro a iguales, lo cual nos da 1~1 = 0,011.
2.4 r-----.-------,------r---r====::::;l e e=0,32-
10
Figura 4.12: Gráfica de() para E= 0,32 y 1.6..1 = 0,011 (caso 4). Aquí puede observarse acentuadas las irregularidades que se mencionaron al analizar la gráfica de () en la figura 4.11.
Existe otra característica importante en estos casos y es una cierta periodicidad en '1/J, a diferencia de los demás casos en los que esta variable presentaba un comportamiento creciente o decreciente (las gráficas de <P y 1jJ no han sido mostradas en los casos anteriores justamente debido a este carácter monótono). Esto se muestra en las figuras 4.13, donde a su vez se observa que las gráficas de 1jJ presentan un tipo similar de irregularidad al exhibido por e o
Estas características bastan para señalar que en este caso el movimiento de espira está muy alejado del caso circular. Esto puede corroborarse adicionalmente con el diagrama de fases mostrado en la figura 4.14. Este diagrama es cualitativamente distinto de los hallados en los casos 1 y 2 (movimientos cuasiperiódicos), así como de los vistos en el caso 3. De cualquier modo, al no hallarse separado por curvas cerradas próximas entre sí, este movimiento no se acerca al movimiento periódico.
78

2.5r-------.--------.--------.------,~======~
'1'
2
1.5 i······i·-·············1·· ............... ¡; .................... ,
o t
Figura 4.13: Gráficas de 'ljJ para el caso 4. A diferencia de los casos anteriores (donde 'ljJ exhibía un carácter monótono), aquí se nota una cierta periodicidad en en la solución para '1/J.
4.5. Indicadores de caos en la espira elíptica.
En la sección 3.9 se introdujeron algunos conceptos acerca de las llamadas soluciones caóticas en un sistema dinámico. En el caso de la espira circular, se observó que las gráficas de lnt5 Jo y lnt5 e crecían lentamente (de la misma forma que la función logarítmica)' aunque con valores negativos, lo cual indicada un movimiento regular. Esto era fácilmente deducible del hecho de que la espira circular es un sistema integrable (en el sentido de que posee tantas integrales de movimiento como grados de libertad).
Éste no es el caso de la espira elíptica. Aquí sólo se dispone de dos integrales de movimiento: la energía total y el momento generalizado Jq,. Con solamente estas dos constantes no es posible una integración completa de las ecuaciones de movimiento, lo cual deja la posibilidad de que el movimiento sea de tipo caótico en lugar de regular. En vista de que en los casos 1 y 2 de la sección anterior se observó un comportamiento análogo al de la espira circular, nos centraremos en los casos 3 y 4, es decir cuando E ;S l.
Recordemos que en el caso regular (no caótico), podíamos afirmar que la separación en el espacio de fases crecía a lo mucho en forma lineal:
t5q -rvat+b t5qo
a>O
de lo cual se deducía, para intervalos de tiempo tales que a t + b ~ a t:
ln(%!) rv ln(at)
79

Para hacer un ejemplo de nuestro análisis consideremos las siguientes condiciones iniciales:
fo(O) = 0,19 j.,¡;(O) = 0,18 0(0) = 1,20 <P(O) = 1,43 1/1(0) = 1,43
y además las cantidades pequeñas:
5fo(O) =O, 001 5j.,¡;(O) = 50(0) = <P(O) = 1/1(0) =O
Figura 4.14: Diagrama de fases ()-Jo para el caso 4. En los movimientos periódicos se tenía que estos diagramas eran curvas cerradas en tanto que en los cuasiperiódicos la figura se hallaba acotada por dos curvas cerradas cercanas (en el caso 3 por ejemplo). Aqui se observa que estos casos no se presentan por lo que el movimiento tiene otra naturaleza.
Con estas condiciones y con E= O, 35 y a= O, 3 obtenemos lb.l = 6, 75. En la figura 4.15 se muestra la gráfica de lnl5fol en función del tiempo como elemento representativo. Comparando con la figura 3.25, que corresponde a la espira circular, vemos notables diferencias con el caso elíptico. Como ya se señaló oportunamente, las gráficas de 5 Jo y 5()
de la espira circular eran muy parecidas (en sus puntos máximos), a curvas logarítmicas, todo esto en virtud de su carácter de sistema integrable. En la figura 4.18 se observa un comportamiento irregular, pero que aún así no crece de manera importante (salvo quizá en 5j.,¡; y 51/J, donde puede mostrarse que estas soluciones exhiben una muy ligera tendencia creciente).
Para extraer conclusiones de este comportamiento recordemos que en sistema caóticos, la separación 5q en el espacio de fases se puede aproximar por:
(4.5.1)
80

siendo A el llamado exponente de Lyapunov del sistema. Al ser A positivo se tendría que:
ln (!!!._) "" t 8qo
(4.5.2)
con lo cual el logaritmo natural de la separación de las soluciones en el espacio de fa..<;es debería crecer en forma (aproximadamente) lineal. Esto no se observa 4.14 en forma clara. Como se dijo ya, algo que sí es notorio en estas gráficas son las irregularidades presentes, aunque esto no es de modo alguno todavía un indicador de que el sistema es totalmente caótico, aunque lo puede ser en pequeña medida.
3r---------r-------~--------~--------~---------,
o llaiiNIIIIL·,· ··· ··IIIIVII·HHIIUilllll················· ·· ··· ··· ·············· ········
-3
-6 . ... ... . ......... ······· .. ¡ .. . . ..... .
_g m 1 e=0,35 lll1=6,75 -1m . ......... f ....... ¡ .......................................... -
- 12 o~-------4~0--------~80--------1~2-0------~16-0------~200
Figura 4.15: Gráfica lnl68l en función del tiempo. Pese a las irregularidades, el crecimiento de esta cantidad es muy limitado (similarmente a lo obtenido para la espira circular).
A parte del simple análisis visual de las soluciones, es posible hacer un estimado de los exponentes de Lyapunov de este sistema en base a las ecuaciones (3.9.3) y (3.9.4). Para esto hay que observar las gráficas de:
1 -lnlófol, t
1 -lnJ8j.¡,J, t
1 -lnJ80l, t
Es evidente que las características principales de estas gráficas dependerán de los parámetros a y t:, que definen el sistema de ecuaciones, además del parámetro~. Nos centraremos nuevamente en los casos 3 y 4, en vista de que los dos primeros casos presentan semejanza con el ca..<;o circular. Para el caso 3, considercdcmos los parámetros:
a= t: = 0,3
81

y las condiciones iniciales siguientes:
.fo(O) = 0,206, .f,p(O) = 0,23, 0(0) = 1,20, <P(O) = 'ljJ(O) = 1,43
fo(O) = 0,207, /.¡,(0) = 0,23, 0(0) = 1,20, c/J(O) = '1/J(O) = 1,43
donde la diferencia sólo radica en el valor inicial de f 0 (0). Con estos valores se obtiene 1~1 = 6:43, y los resultados se muestran en la figura 4.16. En todas estas figuras se observa que la gráfica tiende a un límite muy cercano a cero, lo que cual indica que con mucha probabilidad: el sistema en estas condiciones no es caótico, es decir, el movimiento es estable frente a pequeñas alteraciones en su estado inicial.
o ----------------~----- . ---
rr -20 . -- . ····-----··----···---·-·----··---- - i - --- -· -- -- ---·--- ....... ; ·-··-·- -----··-·· ·---------···--- ¡
e=0,3 IL\1=6,43
-40 l [ · lnlof
01 - ·-
lnloSI-
-60~------~--------~--------L-------~--------~ o 4 8 12 16 20
Figura 4.16: Estimación de los exponentes de Lyapunov en la espira elíptica (r. = O, 3 y ].6.] = 6, 43).
82

Capítulo 5
Conclusiones
5.1. Espira Circular
Empezamos discutiendo las conclusiones a las que hemos llegado luego de estudiar la espira circular.
a) Las ecuaciones de movimiento obtenidas son muy parecidas a las de la peonza simétrica pesada (trompo simétrico con punto de apoyo fijo), salvo un signo en la energía potencial, pues en el caso de la peonza el campo externo era gravitatorio, lo que hacía que la energía potencial sea:
U= MgL cosO
(g es la aceleración de la gravedad y L es la distancia desde el punto de apoyo hasta el centro de masa), en tanto que para la espira circular teníamos:
U= -mB cosO
b) Esta diferencia en el signo no lleva a mayores desviaciones en los resultados obtenidos, comparados con los del trompo. Por ejemplo, los patrones de movimiento del eje de la espira podían clasificarse en tres grupos, los mismos que se hallaban en el estudio de la peonza simétrica, lo que se mostró en las figuras 3.5 y 3.6. Estos diferentes tipos de movimiento se relacionan (como se menciona en la respectiva sección) con los valores de las constantes de movimiento Pc/J y p..¡;, y con los límites del movimiento en B. En cualquier caso, el movimiento en B es acotado y periódico, aunque en el caso de <P y 'ljJ éste varía según los valores de Pc/J y p..¡;.
e) Por otra parte, se estudió la estabilidad de la espira circular respecto de su movimiento estacionario. Observamos que si queremos que la espira se mueva con su eje form3:ndo un ángulo fijo respecto de la vertical, se requieren condiciones específicas sobre <fy, lo cual está en función del· ángulo B constante de acuerdo con la fórmula:
dd<fy = 1
B (/3 ± J (32 + 4 cos 00 ) 7 2 cos o
((3 = p..¡; jI w0 ). La ecuación anterior adicionalmente imponía condiciones sobre el valor de (3, de modo tal que la cantidad subradical en la ecuación sea positiva:
83

Luego se concluyó que las soluciones estacionarias así obtenidas eran estables frente a pequeñas variaciones en las condiciones iniciales (condición en O), debido a que la energía potencial efectiva U(O) presentaba un mínimo (figuras 3.2c y 3.18). Una de las manifestaciones más directas de este hecho se observa en las gráficas del eje de la espira, figura 3.13, que son circunferencias perpendiculares a la dirección vertical, lo que demuestra que el ángulo O es constante.
d) Finalmente, al discutir la posibilidad de un comportamiento caótico en la espira circular, esta posibilidad se descartó totalmente ya que el sistema es integrable (al menos en forma de cuadraturas). Aun así, se mostró que las soluciones cuyas condiciones iniciales eran muy próximas, se mantenía proximas o aumentaban a lo mucho en forma logarítmica (figuras 3.18). A su vez, en la misma figura se mostró una gráfica que nos permitía hacer una estimación de los exponentes de Lyapunov de la espira, donde se observó que este exponente es muy cercano a cero.
5.2. Espira elíptica
En el caso de la espira elíptica en un campo magnético homogéneo se ha llegado a las siguientes conclusiones:
a) Observamos que disponemos de sólo una simetría, que es la simetría de rotación en torno a la dirección k, que define la dirección del campo magnético constante. Con sólo esta simetría tenemos ahora únicamente la constante pq,, aunque se prefiere usar la cantidad adimensional a= pq,j Iw0 .
b) Al resolver numéricamente el sistema de ecuaciones (4.3.4) notamos que existen dos parámetros importantes, el primero es E, que determina la asimetría de la espira según:
además del parámetro~' definido como el cociente entre la energías potencial y cinética iniciales:
Según las simulaciones realizadas, estos parámetros determinan el movimiento de la espira elíptica.
e) Una de las conclusiones más importantes es que cuando la asimetría es pequeña (E « 1), la espira elíptica se comporta en una forma muy similar a la espira circular, fundamentalmente en lo que concierne a pq,. En el caso 1~1 > 1 teníamos que O, p0 y p,¡; eran funciones periódicas, aunque el perído de P..p era mucho mayor al de las otras dos variables, de modo que p,¡; podía considerarse constante durante varios períodos de O y pe, que es la misma característica que se tenía en el caso circular. En el caso 1 ~ 1 « 1 los períodos de O, Po y P,¡; eran de aproximadamente el mismo orden de magnitud, pero en este caso se tenía que la amplitud de p,¡; era muy pequeña, de modo tal que comparado con O y Pe, ésta aparecía casi constante, lo que nos lleva de nuevo al caso de la espira circular.
84

d) Las diferencias surgen cuando la asimetría ya no es pequeña, pero aún así se mantiene menor que uno. Dentro de este caso y cuando 1~1 > 1 existen importantes desviaciones del caso circular. La figura 4.8 nos muestran que en esta situación tanto e como Pe presentan una modulación periódica en sus gráficas. Este comportamiento es similar al que se presenta en el estudio de las oscilaciones acopladas. La amplitud de estas modulaciones se estudió manteniendo ~ constante y se concluyó que existía un valor de E para el cual esta modulación era máxima, disminuyendo posteriormente. Esto era un indicador de una mayor asimetría no asegura necesariamente una mayor desviación respecto de la espira circular. Esta misma característica se observa en los diagramas de fase de la figura 4.9 y en las gráficas del eje de la espira (figura 4.10). Cuando 1~1 « 1 esta característica persiste, pero ahora se tienen que el período de p,¡; es comparable al de e y Pe la modulación se hace menos visible dando lugar a gráficas menos regulares, como se muestra en las figuras 4.11 y 4.12.
e) El fenónemo de modulación de las soluciones se presentan también en los casos 1 y 2 (es decir cuando E « 1), pero allí eran más difíciles de ver debido a que éstas tienen un período comparable al de p,¡;, y en estos casos este período era muy grande (caso 1) o de muy pequeña amplitud.
f) Para finalizar, se hizo un análisis del caos en la espira elíptica para los casos con E no muy pequeño, y se llegó a la conclusión de que las soluciones se separan lentamente aunque en una forma bastante irregular (figura 4.15). Aún así, en la estimación de los exponentes de Lyapunov éstos resultaron casi cero, lo que señala que el sistema es regular dentro de las condiciones iniciales que se han estudiado y dentro de los intervalos de tiempo ( T) analizados. Sin embargo, queda abierta la posibilidad de que el movimiento sea caótico para intervalos de tiempo mayores.
g) En líneas generales, el movimiento de una espira elíptica es muy diferentes al de un trompo simétrico, ya que se presentan diferentes casos muy distintos entre sí.
Estas diferencias entre los movimientos circular y elíptico pueden ser estudiadas con más detalle (esto se deja para un trabajo posterior); por ejemplo, puede llevarse a cabo un análisis más riguroso de la estabilidad (usando Topología), o podría estudiarse el movimiento ahora en presencia de un campo magnético no homogéneno, como por ejemplo el formado por otra espira. También se deja la posibilidad de aplicaciones en el movimiento de nanosatélites.
85

Appendices
86

Apéndice A
Programas en Python.
A.l. Espira circular
En esta parte se incluyen todos los programas usados en la resolución numérica de las ecuaciones diferenciales de la espira circular (en su forma adimensional, ecuaciones (3.3.4)). El programa principal EspiraCircular.py resuelve el sistema de ecuaciones, pero a su vez necesita un conjunto de sub-programas (funciones) para su ejecución. Estas funciones están alojadas en un módulo llamado ModuloCircular.py, que pasamos a describir a continuación.
La primera parte del módulo consiste en definir las funciones F1 , F2 , F3 y F3 que definen el sistema de ecuaciones diferenciales (3.3.4). Como se indica en el programa, las variables Jo, 8, cp y 'ljJ están denotadas por zl, z2, z3 y z4 en ese orden.
#### Funciones en el caso de la espira circular. from math import sin from math import cos
## Variables: ## (f_theta,theta,phi,psi)<>(z1,z2,z3,z4) ## Parámetros: ## (u1,u2)<>(alfa,beta)
## funciones que definen el sistema de EDO's: ## d f_theta/dt F1(z1,z2,z3,z4 1 u1,u2) ## d theta/dt = F2(z1,z2,z3,z4 1 u1,u2) ## d phi/dt = F3(z1,z2,z3,z4 1 u1,u2) ## d psi/dt = F4(z1,z2,z3,z4 1 u1,u2)
def F1(z1,z2,z3,z4,u1,u2): aux1=pow(sin(z2),3) aux2=sin(z2) aux3=cos(z2)*(pow(u1,2)+pow(u2,2))-u1*u2*(1+pow(cos(z2),2)) return (aux3)/aux1-aux2
87

def F2(z1,z2,z3,z4,u1,u2): return z1
def F3(z1,z2,z3,z4,u1,u2): aux1=u1-u2*cos(z2) aux2=pow(sin(z2),2) return aux1/aux2
def F4(z1,z2,z3,z4,u1,u2): aux1=u2/2 aux2=(u1-u2*cos(z2))*cos(z2) aux3=pow(sin(z2),2) return aux1-aux2/aux3
El objetivo de estas funciones es servir en la aplicación de los métodos de Runge-KuttaFehlberg y en los métodos de Adams-Bashforth-Moulton. A continuación se muestra el método de Runge-Kutta-Fehlberg (al que llamamos rkf), que presenta la ventaja respecto del método de Runge-Kutta de cuarto orden en que es posible un estimado directo del error de truncación. Esta función recibe los valores z1 , z2 , z3 y z4 en un cierto instante t y calcula sus valores un instante t + h posterior, haciendo uso de las funciones definidas anteriormente.
## Método de Runge-Kutta-Fehlberg ## sin variable temporal ## (z1,z2,z3,z4) --> (z1+h,z2+h,z3+h,z4+h)
def rkf(tO,z1,z2,z3,z4,u1,u2,h): ## k,m,n,p <>z1,z2,z3,z4 k1=F1(z1,z2,z3,z4,u1,u2)*h m1=F2(z1,z2,z3,z4,u1,u2)*h n1=F3(z1,z2,z3,z4,u1,u2)*h p1=F4(z1,z2,z3,z4,u1,u2)*h
k2=F1(z1+k1/4,z2+m1/4,z3+n1/4,z4+p1/4,u1,u2)*h m2=F2(z1+k1/4,z2+m1/4,z3+n1/4,z4+p1/4,u1,u2)*h n2=F3(z1+k1/4,z2+m1/4,z3+n1/4,z4+p1/4,u1,u2)*h p2=F4(z1+k1/4,z2+m1/4,z3+n1/4,z4+p1/4,u1,u2)*h
k3=F1(z1+(3*k1+9*k2)/32,z2+(3*m1+9*m2)/32,z3+(3*n1+9*n2)/32,z4+ (3*p1+9*p2)/32,u1,u2)*h
m3=F2(z1+(3*k1+9*k2)/32,z2+(3*m1+9*m2)/32,z3+(3*n1+9*n2)/32,z4+ (3*p1+9*p2)/32,u1,u2)*h
n3=F3(z1+(3*k1+9*k2)/32,z2+(3*m1+9*m2)/32,z3+(3*n1+9*n2)/32,z4+ (3*p1+9*p2)/32,u1,u2)*h
p3=F4(z1+(3*k1+9*k2)/32,z2+(3*m1+9*m2)/32,z3+(3*n1+9*n2)/32,z4+
88

k4=F1(z1+(1932*k1-7200*k2+7296*k3)/2197,z2+(1932*m1-7200*m2+ 7296*m3)/2197,z3+(1932*n1-7200*n2+7296*n3)/2197,z4+(1932*p1-
7200*p2+7296*p3)/2197,u1,u2)*h m4=F2(z1+(1932*k1-7200*k2+7296*k3)/2197,z2+(1932*m1-7200*m2+
7296*m3)/2197,z3+(1932*n1-7200*n2+7296*n3)/2197,z4+(1932*p1-7200*p2+7296*p3)/2197,u1,u2)*h
n4=F3(z1+(1932*k1-7200*k2+7296*k3)/2197,z2+(1932*m1-7200*m2+ 7296*m3)/2197,z3+(1932*n1-7200*n2+7296*n3)/2197,z4+(1932*p1-
7200*p2+7296*p3)/2197,u1,u2)*h p4=F4(z1+(1932*k1-7200*k2+7296*k3)/2197,z2+(1932*m1-7200*m2+
7296*m3)/2197,z3+(1932*n1-7200*n2+7296*n3)/2197,z4+(1932*p1-7200*p2+7296*p3)/2197,u1,u2)*h
k5=F1(z1+439*k1/216-8*k2+3680*k3/513-845*k4/4104,z2+439*m1/216-8*m2+3680*m3/513-845*m4/4104,z3+439*n1/216-8*n2+3680*n3/513-845*n4/4104,z4+439*p1/216-8*p2+3680*p3/513-845*p4/4104,u1,u2)*h
m5=F2(z1+439*k1/216-8*k2+3680*k3/513-845*k4/4104,z2+439*m1/216-8*m2+3680*m3/513-845*m4/4104,z3+439*n1/216-8*n2+3680*n3/513-845*n4/4104,z4+439*p1/216-8*p2+3680*p3/513-845*p4/4104,u1,u2)*h
n5=F3(z1+439*k1/216-8*k2+3680*k3/513-845*k4/4104,z2+439*m1/216-8*m2+3680*m3/513-845*m4/4104,z3+439*n1/216-8*n2+3680*n3/513-845*n4/4104,z4+439*p1/216-8*p2+3680*p3/513~845*p4/4104,u1,u2)*h
p5=F4(z1+439*k1/216-8*k2+3680*k3/513-845*k4/4104,z2+439*m1/216-8*m2+3680*m3/513-845*m4/4104,z3+439*n1/216-8*n2+3680*n3/513-845*n4/4104,z4+439*p1/216-8*p2+3680*p3/513-845*p4/4104,u1,u2)*h
k6=F1(z1-8*k1/27+2*k2-3544*k3/2565+1859*k4/4104-11*k5/40,z2-8*m1/27+ 2*m2-3544*m3/2565+1859*m4/4104-11*m5/40,z3-8*n1/27+2*n2-3544*n3/2565+1859*n4/4104-11*n5/40,z4-8*p1/27+2*p2-3544*p3/2565+ 1859*p4/4104-11*p5/40,u1,u2)*h
m6=F2(z1-8*k1/27+2*k2-3544*k3/2565+1859*k4/4104-11*k5/40,z2-8*m1/27+ 2*m2-3544*m3/2565+1859*m4/4104-11*m5/40,z3-8*n1/27+2*n2-3544*n3/2565+1859*n4/4104-11*n5/40,z4-8*p1/27+2*p2-3544*p3/2565+ 1859*p4/4104-11*p5/40,u1,u2)*h
n6=F3(z1-8*k1/27+2*k2-3544*k3/2565+1859*k4/4104-11*k5/40,z2-8*m1/27+ 2*m2-3544*m3/2565+1859*m4/4104-11*m5/40,z3-8*n1/27+2*n2-3544*n3/2565+1859*n4/4104-11*n5/40,z4-8*p1/27+2*p2-3544*p3/2565+ 1859*p4/4104-11*p5/40,u1,u2)*h
p6=F4(z1-8*k1/27+2*k2-3544*k3/2565+1859*k4/4104-11*k5/40,z2-8*m1/27+ 2*m2-3544*m3/2565+1859*m4/4104-11*m5/40,z3-8*n1/27+2*n2-3544*n3/2565+1859*n4/4104-11*n5/40,z4-8*p1/27+2*p2-3544*p3/2565+ 1859*p4/4104-11*p5/40,u1,u2)*h
y1=z1+25*k1/216+1408*k3/2565+2197*k4/4104-k5/5 y2=z2+25*m1/216+1408*m3/2565+2197*m4/4104-m5/5
89

y3=z3+25*n1/216+1408*n3/2565+2197*n4/4104-n5/5 y4=z4+25*p1/216+1408*p3/2565+2197*p4/4104-p5/5
er1=abs(k1/360-128*k3/4275-2197*k4/75240+k5/50+2*k6/55) er2=abs(m1/360-128*m3/4275-2197*m4/75240+m5/50+2*m6/55) er3=abs(n1/360-128*n3/4275-2197*n4/75240+n5/50+2*n6/55) er4=abs(p1/360-128*p3/4275-2197*p4/75240+p5/50+2*p6/55) er=math.sqrt(pow(er1,2)+pow(er2,2)+pow(er3,2)+pow(er4,2))/2 t1=tO+h return t1,y1,y2,y3,y4,k1/h,m1/h,n1/h,p1/h,er
Puede observarse que la función anterior devuelve como resultados, además de los valores finales de las variables z, el tiempo t + h y los errores de truncamiento en cada variable.
La función abm implementa el método de Adams-Bashforth (método predictor) y el método de Adams-Moulton (método corrector). Sus parámetros de entrada son los valores iniciales de cada variable z y un conjunto de 16 cantidades (cuatro para cada variable), necesarias para el cálculo de las soluciones, tanto la predictiva como la correctiva.
## Método de Adams-Bashforth-Mou1ton: def abm(z1,fO,f1,f2,f3,z2,g0,g1,g2,g3,z3,dO,d1,d2,d3,z4,10,11,12,13,u1,u2,h):
# z1 --> fO,f1,f2,f3 # z2 --> gO,g1,g2,g3 # z3 --> dO,d1,d2,d3 # z4 --> 10,11,12,13 pred_z1=z1+h*(55*f3-59*f2+37*f1-9*f0)/24 pred_z2=z2+h*(55*g3-59*g2+37*g1-9*g0)/24 pred_z3=z3+h*(55*d3-59*d2+37*d1-9*d0)/24 pred_z4=z4+h*(55*13-59*12+37*11-9*10)/24
pred_f4=F1(pred_z1,pred_z2,pred_z3,pred_z4,u1,u2) pred_g4=F2(pred_z1,pred_z2,pred_z3,pred_z4,u1,u2) pred_d4=F3(pred_z1,pred_z2,pred_z3,pred_z4,u1,u2) pred_14=F4(pred_z1,pred_z2,pred_z3,pred_z4,u1,u2)
y1=z1+h*(9*pred_f4+19*f3-5*f2+f1)/24 y2=z2+h*(9*pred_g4+19*g3-5*g2+g1)/24 y3=z3+h*(9*pred_d4+19*d3-5*d2+d1)/24 y4=z4+h*(9*pred_14+19*13-5*12+11)/24
er1=abs(y1-pred_z1)/14 er2=abs(y2-pred_z2)/14 er3=abs(y3-pred_z3)/14 er4=abs(y4-pred_z4)/14
er=math.sqrt(pow(er1,2)+pow(er2,2)+pow(er3,2)+pow(er4,2))/2 return y1,y2,y3,y4,er
90
Para algunos cálculos será necesario tener una expresión para la energía adimensional de la espira, así como la norma (distancia) en el espacio de fases.
## Energía (adimensional) de la espira y norma ## en el espacio de fases: def en(z1,z2,z3,z4,u1,u2):
C=u1-cos(z2)*u2 return z1*z1/(2)+u2*u2/4+C*C/(2*pow(sin(z2),2))-cos(z2)
def norm(a1,a2,a3,a4,b1,b2,b3,b4): ## (a1,a2,a3,a4) <> punto arbitrario ## (b1,b2,b3,b4) <>punto inicial aux1=pow(a1-b1,2)+pow(a2-b2,2)+pow(a3-b3,2)+pow(a4-b4,2) return math.sqrt(aux1)
Las funciones anteriores sirven como herramientas para la función principal, que implementa el método corrector-predictor sobre nuestro sistema de ecuaciones, llamada abmrkf. Esta función recibe un instante inicial t0 y uno final t 1 , entre los cuales determinará la soluciones. Además hay que ingresar las condiciones iniciales (en cada variable), lo cual nos asegurará una solución única. El programa utiliza la función rkf para determinar los otros tres valores adicionales necesarios para usar el método de AdamsBashforth-Moulton, usando el paso H, el cual es a su vez un argumento de la función abmrkf.
## Método corrector predictor con ## control de error: def abmrkf(t0,t1,z01,z02,z03,z04,tol,H,h_min,u1,u2,file):
## empezamos en tO y queremos ## la solución en t1. tol_64=tol/64 zero=le-20 cont,shortrange=O,O ## variables t=[O for i in range(5)] z1=[0 for i in range(5)] z2=[0 for i in range(5)] z3=[0 for i in range(5)] z4=[0 for i in range(5)] ## other variables f=[O for i in range(4)) g=[O for i in range(4)] d=[O for i in range(4)] 1=[0 for i in range(4)] ## initializing: t[O],z1[0],z2[0],z3[0],z4[0]=t0,z01,z02,z03,z04 i,state=O,O while state==O:
if i==3:
91

f[3]=F1(z1[3],z2[3],z3[3],z4[3],u1,u2) g[3]=F2(z1[3],z2[3],z3[3],z4[3],u1,u2) d[3]=F3(z1[3] ,z2[3] ,z3[3],z4[3],u1,u2) 1[3]=F4(z1[3],z2[3],z3[3],z4[3],u1,u2) t [4] =t [3] +H z1[4],z2[4],z3[4],z4[4] ,er=abm(z1[3],f[O],f[1],f[2],f[3],z2[3],
g[O],g[1],g[2],g[3],z3[3],d[O],d[1],d[2] ,d[3],z4[3], l[O] ,1[1] ,1[2] ,1[3] ,u1,u2,H)
print(er,H) iserror_ok=1 if er<=H*tol 64 iserror ok=O if er>H*tol iserror_ok=2 if iserror_ok<2:
for j in range(4): t [j] =t [j + 1] z1 [j] =z1 [j+1] z2 [j] =z2 [j+1] z3 [j] =z3 [j+1] z4 [j] =z4 [j+1] e=en(zl[j] ,z2[j] ,z3[j] ,z4[j] ,u1,u2) file.write(' %.7f %.7f %.7f %.7f %.7f %.7f\n'
% (t[j] ,z1[j] ,z2[j] ,z3[j] ,z4[j] ,e) ) for j in range(3):
f [j] =f [j+1] g [j] =g [j+1] d[j]=d[j+1] l[j] =l[j+1]
## if 'i' is different from 3: else:
## we obtain the next value and its error: t[i+1] ,z1[i+1] ,z2[i+1] ,z3[i+1] ,z4[i+1] ,f[i] ,g[i] ,d[i] ,l[i] ,er
=rkf(t[i],z1[i],z2[i],z3[i],z4[i],u1,u2,H) print(er,H) if er>H*tol:
iserror_ok=2 else:
iserror_ok=1 i=i+1 e=en(z1[i],z2[i],z3[i],z4[i],u1,u2) file.write(' %.7f %.7f %.7f %.7f %.7f %.7f\n' %
(t[i] ,z1[i] ,z2[i] ,z3[i] ,z4[i] ,e) ) ## what happens if er>H*tol ?? if iserror_ok==2:
H=H/2 ## we decrease the pass. if H<h_min: state=1 t [O] , zl[O] , z2 [O] , z3 [O] , z4 [O] , i=t [i] , z1 [i] , z2 [i] , z3 [i] ,
z4[i],O # updating initial conditions
92

else: # if iserror_ok is different from 2. if abs(tl-t[i])<=zero:
state=2 else:
if iserror_ok==O: cont=cont+l if cont==8:
H=H*2 t [O] , zl[O] , z2 [0] , z3 [O] , z4 [0] , i =t [i] , zl[i] , z2 [i] ,
z3[i],z4[i],O # updating initial conditions else:
cont=O if H>t1-t [i] :
shortrange=l working_h=H H=tl-t [i] t [O] , zl[O] ,z2 [O] , z3 [O] , z4 [O] , i=t [i] , zl[i] , z2 [i] , z3 [i] ,
z4[i],O # updating initial conditions else:
shortrange=O
if shortrange==l: H=working_h
if state==2: success=l return z1[i],z2[i],z3[i],z4[i],success
else: success=O return O,O,O,O,success
Con todas estas funciones podemos ejecutar el programa EspiraCircular.py, que resuelve el sistema de ecuaciones (3.3.4.):
## Solución del sistema de ecuaciones diferenciales ## adimensionales para la espira circular por el método ## corrector-predictor. ## Los *** indican valores que se colocan para ## ca4a caso en particular.
import math from math import sin from math import cos import ModuloCircular
##Tolerancias: epsilon=5e-10 h_min=le-5
93

## parámetros: alfa, beta=****•**** # abrimos fichero: fichero=open(' .. /dat/EspiraCircular.dat','w') ##Condiciones iniciales (pi/2=1.57): t0,t1=0,50 z10,z20,z30,z40=****·****•****•**** ## Energía: e=ModuloCircular.en(z10,z20,z30,z40,alfa,beta) fichero.write(' %.7f %.7f %.7f %.7f %.7f %.7f\n'
% (tO,z10,z20,z30,z40,e)) ##paso: hO=(tl-tO) / (100) h=hO z1,z2,z3,z4,success=ModuloCircular.abmrkf(tO,t1,z10,z20,z30,z40,
epsilon,h,h_min,alfa,beta,fichero)
fichero. close O print(success) print(e-pow(beta,2)/4)
El programa anterior devuelve un archivo de texto Espira Circular .dat con cinco columnas, que muestran el tiempo, las cuatro variables canónicas Jo, e, cjJ y 'ljJ, y el valor de la energía (constante). Estos datos pueden ser calculados con diferentes herramientas. En tdo ste trabajo se ha usado GNUplot versión 4.4.
Para aplicar el método abmrkf al estudio del caos en la espira circular es necesario hacer ligeras modificaciones en el código anterior. Éste modificaciones están plasmadas en el programa adjunto.
## Programa para el estudio de los ## exponentes de Lyapunov en la espira circular.
import math from math import log import circular_modulo
## Tolerancias: epsilon=5e-10 h_min=le-5 ## parámetros: 1=8.56 mB=2.56 ## constantes: p_phi=3.46 p_psi=5.46 tO,tn,n=0,300,6000 fichero=open(' .. /dat/circular_lyapunov.dat','w') ## Condiciones iniciales:
94
z10,z20,z30,z40=0.56,1.34,0.45,0.45 y10,y20,y30,y40=0.56+0.0001,1.34,0.45,0.45 ## Distancia inicial: DO=circular_modulo.norm(z10,z20,z30,z40,y10,y20,y30,y40) fichero.write(' %.7f %.7f %.7f %.7f %.7f %.7f
%.7f %.7f\n'% ( t0,1,0.0,0.0,log(abs(z10-y10)), abs(z20-y20),abs(z30-y30),abs(z40-y40) ) )
hO=(tn-tO)/n h=hO for i in range(1,n+1):
t1=tO+hO z1,z2,z3,z4,success1=circular_modulo.abmrkf(tO,t1,z10,z20,z30,
z40,epsilon,h,h_min,I,p_phi,p_psi,mB) y1,y2,y3,y4,success2=circular_modulo.abmrkf(tO,t1,y10,y20,y30,
y40,epsilon,h,h_min,I,p_phi,p_psi,mB) if success1==1 and success2==1:
tO=t1 z10,z20,z30,z40=z1,z2,z3,z4 y10,y20,y30,y40=y1,y2,y3,y4 D=circular_modulo.norm(z10,z20,z30,z40,y10,y20,y30,~40)
fichero.write(' %.7f %.7f %.7f %.7f %.7f %.7f %.7f
else:
%.7f\n'% (tO,D/DO,math.log(D/DO),math.log(D/DO)/i, log(abs(z10-y10)),log(abs(z20-y20)),log(abs(z30-y30)), log(abs(z40-y40)) ) )
print('No se pudo calcular más valores.') break
fichero. clase O
Como se puede observar, en esta versión del programa se piden dos conjuntos de condiciones iniciales, muy próximas entre sí. El programa resuelve el sistema de ecuaciones con ambas condiciones iniciales y escribe las soluciones en el archivo LyapunovCircular.dat.
Adicionalmente a la resolución del sistema de ecuaciones (3.3.4), también es útil resolver la ecuación (3.4.6), que determina los puntos de retorno de la espira, para ciertas condiciones iniciales. Esta ecuación se resuelve por el método de Newton-Raphson usando la función:
f(u) =(a- (3u) 2- (1- u2)(2u +-y)
Esta función y su derivada se muestran a continuación:
def FuncRet(u,u1,u2,z10,z20): # u1,u2 <> alpha,beta # z10,z20 <> f_theta(O),theta(O) q=gamma(u1,u2,z10,z20) f=pow(u1-u2*u,2)-(1-pow(u,2))*(2*u+q) df=6*pow(u,2)+2*u*(pow(u2,2)+q)-2*(1+u1*u2)
return f,df
95

y la función ¡ es:
def gamma(u1,u2,z10,z20): # u1,u2 <> alpha,beta # z10,z20 <> f_theta(O),theta(O) C=pow( (u1-u2*cos(z20))/(sin(z20)),2) return z10*z10+C-2*cos(z20)
Como puede observarse, ambas funciones reciben como parámetros los valores de a y (3, además de las condiciones iniciales en Jo y e (las ·condiciones iniciales en ifJ y 1/J son irrelevantes en este caso). El método de N ewton-Raphson se muestra a continuación:
def NewtonRet(xO,z10,z20,tol,JMAX,u1,u2): ## xO primer intento ## tol tolerancia permitida ## JMAX número máximo de iteraciones ## (u1,u2) (alfa,beta) zero=ie-20 x=xO ## inicializamos x ext=O for i in range(JMAX+1):
fx,dfx=FuncRet(x,u1,u2,z10,z20) if abs(dfx)<zero:
print('Función casi plana.') ext=1 break
dx=-fx/dfx x=x+dx if abs(dx)<=tol:
ext=2 break
return x,ext
Todas estas funciones se incluyen en el módulo ModuloNewton.py, y la implementación de estas funciones se hace en e programa MainNewton.py:
## Cálculo de los puntos de ## retorno por el método de Newton.
import math import ModuloNewton
alfa, beta=***•*** z10,z20=***,*** tol=5e-10 N=20 xO=*** root,out=ModuloNewton.NewtonRet(xO,z10,z20,tol,N,alfa,beta,)
96

if out==1: print('No pudo hallarse la raíz.')
else: a=ModuloNewton.func(root,alfa,beta) print(root,a)
El programa anterior funciona de la siguiente manera, con los valores de a, (3, zlO y z20 se calcula /, y con ello puede graficarse la función f. De esta gráfica se obtien un valor (aproximado) de cada raiz, que en le programa NewtonRet denominamos xO. Con este valor puede hallarse una versión mejorada con el programa MainNewton.py.
A.2. Espira Elíptica
Para la resolución de las ecuaciones de movimiento de la espira elípitca se sigue un procedimiento análogo al usado con la espira circular. Se muestra a continuación el módulo ModuloElipse.py.
### Funciones para la espira elíptica. ### Método de Runge-Kutta-Felhberg. ### Método de Adams-Bashforth-Moulton. ### Función de energía. ### Trabajamos con las ecuaciones adimensionales. import math from math import sin from math import cos
## (p_theta,p_psi,theta,phi,psi)<>(z1,z2,z3,z4,z5) ## constantes y parámetros: ## (u1,u2)<>(epsilon,alfa)
## sistema de ecuaciones diferenciales: ## d p_theta ## F1(z1,z2,z3,z4,z4,u1,u2) --------- = ##
##
##
##
##
##
##
##
##
##
##
##
##
d t d p_psi -------
d t d theta -------
d t d phi
d t d psi
d t
F2(z1,z2,z3,z4,z4,u1,u2)
F3(z1,z2,z3,z4,z4,u1,u2)
= F4(z1,z2,z3,z4,z4,u1,u2)
= F5(z1,z2,z3,z4,z4,u1,u2)
97

def F1(z1,z2,z3,z4,z5,u1,u2): A=1+u1*pow(sin(z5),2) B=u1*sin(z5)*cos(z5) C=u2-cos(z3)*z2 aux=(1+u1)*pow(sin(z3),2) return -(z2-cos(z3)*u2)*(B*z1+A*C/sin(z3))/aux-sin(z3)
def F2(z1,z2,z3,z4,z5,u1,u2): A=1+u1*pow(sin(z5),2) B=u1*sin(z5)*cos(z5) C=u2-cos(z3)*z2 aux=(1+u1)*pow(sin(z3),2) return -u1*( sin(z3)*z1*C*cos(2*z5)+sin(z5)*cos(z5)*
( pow(C,2)-pow(z1*sin(z3),2) ) )/aux
def F3(z1,z2,z3,z4,z5,u1,u2): A=1+u1*pow(sin(z5),2) B=u1*sin(z5)*cos(z5) C=u2-cos(z3)*z2 return z1*( 1+B*B/(1+u1) )/A+B*C/( (1+u1)*sin(z3) )
def F4(z1,z2,z3,z4,z5,u1,u2): A=1+u1*pow(sin(z5),2) B=u1*sin(z5)*cos(z5) C=u2-cos(z3)*z2 aux=(1+u1)*pow(sin(z3),2) return (B*sin(z3)*z1+A*C)/aux
def F5(z1,z2,z3,z4,z5,u1,u2): A=1+u1*pow(sin(z5),2) B=u1*sin(z5)*cos(z5) C=u2-cos(z3)*z2 aux=(1+u1)*pow(sin(z3),2) return z2/(2+u1)-cos(z3)*( sin(z3)*z1*B+A*C )/aux
## Método de Runge-Kutta-Felhberg: def rkf(t0,z1,z2,z3,z4,z5,u1,u2,h):
## (k,m,n,p,q) <> (z1,z2,z3,z4,z5) ## en tO --> z1,z2,z3,z4,z5 ## Obtenemos las soluciones en t1 ## t1=tO+h
k1=F1(z1,z2,z3,z4,z5,u1,u2)*h m1=F2(z1,z2,z3,z4,z5,u1,u2)*h n1=F3(z1,z2,z3,z4,z5,u1,u2)*h p1=F4(z1,z2,z3,z4,z5,u1,u2)*h q1=F5(z1,z2,z3,z4,z5,u1,u2)*h
98

k2=F1(z1+k1/4,z2+m1/4,z3+n1/4,z4+p1/4,z5+q1/4,u1,u2)*h m2=F2(z1+k1/4,z2+m1/4,z3+n1/4,z4+p1/4,z5+q1/4,u1,u2)*h n2=F3(z1+k1/4,z2+m1/4,z3+n1/4,z4+p1/4,z5+q1/4,u1,u2)*h p2=F4(z1+k1/4,z2+m1/4,z3+n1/4,z4+p1/4,z5+q1/4,u1,u2)*h q2=F5(z1+k1/4,z2+m1/4,z3+n1/4,z4+p1/4,z5+q1/4,u1,u2)*h
k3=F1(z1+(3*k1+9*k2)/32,z2+(3*m1+9*m2)/32,z3+ (3*n1+9*n2)/32,z4+(3*p1+9*p2)/32,z5+(3*q1+9*q2)/32,u1,u2)*h
m3=F2(z1+(3*k1+9*k2)/32,z2+(3*m1+9*m2)/32,z3+ (3*n1+9*n2)/32,z4+(3*p1+9*p2)/32,z5+(3*q1+9*q2)/32,u1,u2)*h
n3=F3(z1+(3*k1+9*k2)/32,z2+(3*m1+9*m2)/32,z3+ (3*n1+9*n2)/32,z4+(3*p1+9*p2)/32,z5+(3*q1+9*q2)/32,u1,u2)*h
p3=F4(z1+(3*k1+9*k2)/32,z2+(3*m1+9*m2)/32,z3+ (3*n1+9*n2)/32,z4+(3*p1+9*p2)/32,z5+(3*q1+9*q2)/32,u1,u2)*h
q3=F5(z1+(3*k1+9*k2)/32,z2+(3*m1+9*m2)/32,z3+ (3*n1+9*n2)/32,z4+(3*p1+9*p2)/32,z5+(3*q1+9*q2)/32,u1,u2)*h
k4=F1(z1+(1932*k1-7200*k2+7296*k3)/2197,z2+(1932*m1-7200*m2+ 7296*m3)/2197,z3+(1932*n1-7200*n2+7296*n3)/2197,z4+(1932*p1-7200*p2+7296*p3)/2197,z5+(1932*q1-7200*q2+7296*q3)/2197,u1,u2)*h
m4=F2(z1+(1932*k1-7200*k2+7296*k3)/2197,z2+(1932*m1-7200*m2+ 7296*m3)/2197,z3+(1932*n1-720Ü*n2+7296*n3)/2197,z4+(1932*p1-7200*p2+7296*p3)/2197,z5+(1932*q1-7200*q2+7296*q3)/2197,u1,u2)*h
n4=F3(z1+(1932*k1-7200*k2+7296*k3)/2197,z2+(1932*m1-7200*m2+ 7296*m3)/2197,z3+(1932*n1-7200*n2+7296*n3)/2197,z4+(1932*p1-7200*p2+7296*p3)/2197,z5+(1932*q1-7200*q2+7296*q3)/2197,u1,u2)*h
p4=F4(z1+(1932*k1-7200*k2+7296*k3)/2197,z2+(1932*m1-7200*m2+ 7296*m3)/2197,z3+(1932*n1-7200*n2+7296*n3)/2197,z4+(1932*p1-7200*p2+7296*p3)/2197,z5+(1932*q1-7200*q2+7296*q3)/2197,u1,u2)*h
q4=F5(z1+(1932*k1-7200*k2+7296*k3)/2197,z2+(1932*m1-7200*m2+ 7296*m3)/2197,z3+(1932*n1-7200*n2+7296*n3)/2197,z4+(1932*p1-7200*p2+7296*p3)/2197,z5+(1932*q1-7200*q2+7296*q3)/2197,u1,u2)*h
k5=F1(z1+439*k1/216-8*k2+3680*k3/513-845*k4/4104,z2+439*m1/216-8*m2+3680*m3/513-845*m4/4104,z3+439*n1/216-8*n2+3680*n3/513-845*n4/4104,z4+439*p1/216-8*p2+3680*p3/513-845*p4/4104,z5+ 439*q1/216-8*q2+3680*q3/513-845*q4/4104,u1,u2)*h
m5=F2(z1+439*k1/216-8*k2+3680*k3/513-845*k4/4104,z2+439*m1/216-8*m2+3680*m3/513-845*m4/4104,z3+439*n1/216-8*n2+3680*n3/513-845*n4/4104,z4+439*p1/216-8*p2+3680*p3/513-845*p4/4104,z5+ 439*q1/216-8*q2+3680*q3/513-845*q4/4104,u1,u2)*h
n5=F3(z1+439*k1/216-8*k2+3680*k3/513-845*k4/4104,z2+439*m1/216-8*m2+3680*m3/513-845*m4/4104,z3+439*n1/216-8*n2+3680*n3/513-845*n4/4104,z4+439*p1/216-8*p2+3680*p3/513-845*p4/4104,z5+ 439*q1/216-8*q2+3680*q3/513-845*q4/4104,u1,u2)*h
p5=F4(z1+439*k1/216-8*k2+3680*k3/513-845*k4/4104,z2+439*m1/216-
99

8*m2+3680*m3/513-845*m4/4104,z3+439*n1/216-8*n2+3680*n3/513-845*n4/4104,z4+439*p1/216-8*p2+3680*p3/513-845*p4/4104,z5+ 439*q1/216-8*q2+3680*q3/513-845*q4/4104,u1,u2)*h
q5=F5(z1+439*k1/216-8*k2+3680*k3/513-845*k4/4104,z2+439*m1/216-8*m2+3680*m3/513-845*m4/4104,z3+439*n1/216-8*n2+3680*n3/513-845*n4/4104,z4+439*p1/216-8*p2+3680*p3/513-845*p4/4104,z5+ 439*q1/216-8*q2+3680*q3/513-845*q4/4104,u1,u2)*h
k6=F1(z1-8*k1/27+2*k2-3544*k3/2565+1859*k4/4104-11*k5/40,z2-8*m1/27+2*m2-3544*m3/2565+1859*m4/4104-11*m5/40,z3-8*n1/27+ 2*n2-3544*n3/2565+1859*n4/4104-11*n5/40,z4-8*p1/27+2*p2-3544*p3/2565+1859*p4/4104-11*p5/40,z5-8*q1/27+2*q2-3544*q3/2565+1859*q4/4104-11*q5/40,u1,u2)*h
m6=F2(z1-8*k1/27+2*k2-3544*k3/2565+1859*k4/4104-11*k5/40,z2-8*m1/27+2*m2-3544*m3/2565+1859*m4/4104-11*m5/40,z3-8*n1/27+ 2*n2-3544*n3/2565+1859*n4/4104-11*n5/40,z4-8*p1/27+2*p2-3544*p3/2565+1859*p4/4104-11*p5/40,z5-8*q1/27+2*q2-3544*q3/2565+1859*q4/4104-11*q5/40,u1,u2)*h
n6=F3(z1-8*k1/27+2*k2-3544*k3/2565+1859*k4/4104-11*k5/40,z2-8*m1/27+2*m2-3544*m3/2565+1859*m4/4104-11*m5/40,z3-8*n1/27+ 2*n2-3544*n3/2565+1859*n4/4104-11*n5/40,z4-8*p1/27+2*p2-3544*p3/2565+1859*p4/4104-11*p5/40,z5-8*q1/27+2*q2-3544*q3/2565+1859*q4/4104-11*q5/40,u1,u2)*h
p6=F4(z1-8*k1/27+2*k2-3544*k3/2565+1859*k4/4104-11*k5/40,z2-8*m1/27+2*m2-3544*m3/2565+1859*m4/4104-11*m5/40,z3-8*n1/27+ 2*n2-3544*n3/2565+1859*n4/4104-11*n5/40,z4-8*p1/27+2*p2-3544*p3/2565+1859*p4/4104-11*p5/40,z5-8*q1/27+2*q2-3544*q3/2565+1859*q4/4104-11*q5/40,u1,u2)*h
q6=F5(z1-8*k1/27+2*k2-3544*k3/2565+1859*k4/4104-11*k5/40,z2-8*m1/27+2*m2-3544*m3/2565+1859*m4/4104-11*m5/40,z3-8*n1/27+ 2*n2-3544*n3/2565+1859*n4/4104-11*n5/40,z4-8*p1/27+2*p2-3544*p3/2565+1859*p4/4104-11*p5/40,z5-8*q1/27+2*q2-3544*q3/2565+1859*q4/4104-11*q5/40,u1,u2)*h
y1=z1+25*k1/216+1408*k3/2565+2197*k4/4104-k5/5 y2=z2+25*m1/216+1408*m3/2565+2197*m4/4104-m5/5 y3=z3+25*n1/216+1408*n3/2565+2197*n4/4104-n5/5 y4=z4+25*p1/216+1408*p3/2565+2197*p4/4104-p5/5 y5=z5+25*q1/216+1408*q3/2565+2197*q4/4104-q5/5
er1=abs(k1/360-128*k3/4275-2197*k4/75240+k5/50+2*k6/55) er2=abs(m1/360-128*m3/4275-2197*m4/75240+m5/50+2*m6/55) er3=abs(n1/360-128*n3/4275-2197*n4/75240+n5/50+2*n6/55) er4=abs(p1/360-128*p3/4275-2197*p4/75240+p5/50+2*p6/55) er5=abs(q1/360-128*q3/4275-2197*q4/75240+q5/50+2*q6/55) er=math.sqrt( (pow(er1,2)+pow(er2,2)+pow(er3,2)+
pow(er4,2)+pow(er5,2))/5 )
100

t1=tO+h
return t1,y1,y2,y3,y4,y5,k1/h,m1/h,n1/h,p1/h,q1/h,er
## energía adimensional de la ## espira elíptica: def en(z1,z2,z3,z4,z5,u1,u2):
## (u1,u2) <> (eps,alfa) A=1+u1*pow(sin(z5),2) B=u1*sin(z5)*cos(z5) C=u2-cos(z3)*z2 aux1=z2*z2/(2*(2+u1)) aux2=B*z1*C/((1+u1)*sin(z3)) aux3=A*C*C/(2*(1+u1)*pow(sin(z3),2)) aux4=z1*z1*(1+u1*pow(cos(z5),2))/(2*(1+u1)) aux5=-cos(z3) return aux1+aux2+aux3+aux4+aux5
### función para hallar la norma ### en el espacio de fases: def norm(a1,a2,a3,a4,a5,b1,b2,b3,b4,b5):
## (a1,a2,a3,a4,a5) <> punto arbitrario ## (b1,b2,b3,b4,b5) <> punto inicial aux1=pow(a1-b1,2)+pow(a2-b2,2)+pow(a3-b3,2)+pow(a4-b4,2)+pow(a5-b5,2) return math.sqrt(aux1)
## Método de Adams-Bashforth-Moulton: def abm(z1,fO,f1,f2,f3,z2,gO,g1,g2,g3,z3,dO,d1,d2,d3,
z4,lO,l1,l2,l3,z5,sO,s1,s2,s3,u1,u2,h): # z1 --> fO,f1,f2,f3 # z2 --> g0,g1,g2,g3 # z3 --> dO,d1,d2,d3 # z4 --> 10,11,12,13 # z5 --> s0,s1,s2,s3 pred_z1=z1+h*(55*f3-59*f2+37*f1-9*f0)/24 pred_z2=z2+h*(55*g3-59*g2+37*g1-9*g0)/24 pred_z3=z3+h*(55*d3-59*d2+37*d1-9*d0)/24 pred_z4=z4+h*(55*l3-59*l2+37*l1-9*l0)/24 pred_z5=z5+h*(55*s3-59*s2+37*s1-9*s0)/24
pred_f4=F1(pred_z1,pred_z2,pred_z3,pred_z4,pred_z5,u1,u2) pred_g4=F2(pred_z1,pred_z2,pred_z3,pred_z4,pred_z5,u1,u2) pred_d4=F3(pred_z1,pred_z2,pred_z3,pred_z4,pred_z5,u1,u2) pred_l4=F4(pred_z1,pred_z2,pred_z3,pred_z4,pred_z5,u1,u2) pred_s4=F5(pred_z1,pred_z2,pred_z3,pred_z4,pred_z5,u1,u2)
101

y1=z1+h*(9*pred_f4+19*f3-5*f2+f1)/24 y2=z2+h*(9*pred_g4+19*g3-5*g2+g1)/24 y3=z3+h*(9*pred_d4+19*d3-5*d2+d1)/24 y4=z4+h*(9*pred_l4+19*13-5*12+11)/24 y5=z5+h*(9*pred_s4+19*s3-5*s2+s1)/24
er1=abs(y1-pred_z1)/14 er2=abs(y2-pred_z2)/14 er3=abs(y3-pred_z3)/14 er4=abs(y4-pred_z4)/14 er5=abs(y5-pred_z5)/14 er=math.sqrt((pow(er1,2)+pow(er2,2)+pow(er3,2)+
pow(er4,2)+pow(er5,2))/5)
return y1,y2,y3,y4,y5,er
## método corrector predictor con ## control de error: def abmrkf(tO,t1,z01,z02,z03,z04,z05,tol,H,h_min,u1,u2,file):
## empezamos en tO y queremos la solución en t1. ## z01,z02,z03,z04,z05 --> condiciones iniciales ## tol: error permitido ## h_min: mínimo paso permitido ## u1,u2 --> eps,alfa tol_64=tol/64 zero=ie-20 cont,shortrange=O,O ## variables t=[O for i in range(5)] z1=[0 for i in range(5)] z2=[0 for i in range(5)] z3=[0 for i in range(5)] z4=[0 for i in range(5)] z5=[0 for i in range(5)] ## other variables f=[O for i in range(4)] g=[O for i in range(4)] d=[O for i in range(4)] 1=[0 for i in range(4)] s=[O for i in range(4)] ## initializing: t[O],z1[0],z2[0],z3[0],z4[0],z5[0]=t0,z01,z02,z03,z04,z05 i,state=O,O while state==O:
if i==3: f[3]=F1(z1[3],z2[3],z3[3],z4[3],z5[3],u1,u2) g[3]=F2(z1[3],z2[3],z3[3],z4[3],z5[3],u1,u2)
102
d [3] =F3 (z 1[3] , z2 [3] , z3 [3] , z4 [3] , z5 [3] , u1, u2) 1[3]=F4(z1[3],z2[3],z3[3],z4[3],z5[3],u1,u2) s[3]=F5(z1[3] ,z2[3] ,z3[3],z4[3],z5[3],u1,u2) t [ 4] =t [3] +H z1[4],z2[4],z3[4],z4[4],z5[4],er=abm(z1[3],f[O],
f[1],f[2],f[3],z2[3],g[O],g[1],g[2],g[3],z3[3], d[O],d[1],d[2],d[3],z4[3],1[0],1[1],1[2],1[3], z5[3],s[O],s[1],s[2],s[3],u1,u2,H)
print(er,H) iserror_ok=1 if er<=H*tol_64 iserror_ok=O if er>H*tol iserror_ok=2 if iserror_ok<2:
for j in range(4): t [j] =t [j+1] z1 [j]=z1 [j+1] z2 [j] =z2 [j+1] z3 [j] =z3 [j+1] z4 [j] =z4 [j+1] z5 [j] =z5 [j+1] e=en(z1[j] ,z2[j] ,z3[j] ,z4[j] ,z5[j] ,u1,u2) file.write(' %.7f %.7f %.7f %.7f %.7f
%. 7f %. 7f\n' % (t [j], z1 [j], z2 [j], z3 [j], z4 [j] ,z5 [j] ,e) )
for j in range(3): f [j]=f [j+1] g [j] =g [j+1] d [j] =d [j+1] 1 [j]=l [j+1] s[j]=s[j+1]
## if 'i' is different from 3: else:
## we obtain the next value and its error: t[i+1],z1[i+1],z2[i+1],z3[i+1],z4[i+1],z5[i+1],
f [i] , g [i] , d [i] , l[i] , s [i] , er=rkf ( t [i] , zi[i] , z2[i],z3[i],z4[i],z5[i],u1,u2,H)
print(er,H) if er>H*tol:
iserror_ok=2 else:
iserror_ok=1 i=i+1 e=en(z1[i],z2[i],z3[i],z4[i],z5[i],u1,u2) file.write(' %.7f %.7f %.7f %.7f %.7f %.7f
%.7f\n'% (t[i],z1[i],z2[i],z3[i],z4[i],z5[i],e) ) ## what happens if er>H*tol ?? if iserror_ok==2:
103

H=H/2 ## we decrease the pass. if H<h_min: state=1 t[O],z1[0],z2[0],z3[0],~4[0],z5[0],i=t[i],z1[i],
z2[i] ,z3[i],z4[i],z5[i] ,O# updating initial conditions else: # if iserror_ok is different from 2.
if abs(t1-t[i])<=zero: state=2
else: if iserror_ok==O:
cont=cont+1 if cont==8:
H=H*2 t[O],z1[0],z2[0],z3[0],z4[0],z5[0],i=
t[i] ,zi[i] ,z2[i] ,z3[i] ,z4[i] ,z5[i] ,O # updating initial conditions
else: cont=O
if H>t1-t [i] : shortrange=1 working_h=H H=t1-t [i] t[O],z1[0],z2[0],z3[0],z4[0],z5[0] ,i=
t [i] ,z1[i] ,z2[i] ,z3[i] ,z4[i] ,z5[i] ,O # updating initial conditions
else: shortrange=O
if shortrange==1: H=working_h
if state==2: success=1 return z1[i],z2[i],z3[i],z4[i],z5[i],success
else: success=O return O,O,O,O,O,success
Lo mismo que en el caso circular, necesitamos un programa adicional que ejecute las funciones presentes en el módulo ElipseModulo.py:
## Solución del sistema de ecuaciones diferenciales ## para la espira elíptica por el método ## corrector-predictor.
import math from math import sin from math import cos import ModuloElipse
104

## Tolerancias: epsilon=5e-10 h_min=le-5 ## parámetro de asimetría: eps=*** alfa=***
# abrimos fichero: fichero=open(' .. /dat/EspiraEliptica.dat','w') ## Intervalo de tiempo: tO,t1=0,100 ## Condiciones iniciales: z10,z20,z30,z40,z50=***•***•***•*** ## Energía: U=-math.cos(z30) e=ModuloElipse.en(z10,z20,z30,z40,z50,eps,alfa)
fichero.write(' %.7f %.7f\n'
## paso: h0=(t1-t0) 1 (100) h=hO
%.7f %.7f %.7f %.7f %.7f % (tO,z10,z20,z30,z40,z50,e))
z1,z2,z3,z4,z5,success=ModuloElipse.abmrkf(tO,t1, z10,z20,z30,z40,z50,epsilon,h,h_min,eps,alfa,fichero)
fichero. clase O T=e-U print(e,T,U,U/T) print(success)
105

Apéndice B
Oscilaciones unidimensionales
Consideremos un sistema con un sólo grado de libertad sujeto a la interacción de un campo externo estacionario U ( q). La energía (constante) del sistema es:
; (~~r +U(x) =E
si definimos V(x) = 2U(x)jm y a= 2E/m obtenemos:
(~~r + V(x) =a (B.O.l)
analicemos el caso en el que la función V(x) presenta un mínimo en cierto punto x0 , es decir es de la forma que se muestra en la figura adjunta.
V(x)
De la ecuación (B.O.l) se deduce que el movimiento sólo puede darse en la región limitada por los valores de x en el intervalo [xm, xM]; el valor de los extremos Xrn y XM se obtienen de la ecuación:
V(x) =a (B.0.2)
y se denomina puntos de retorno, ya que en estos puntos se tiene que x = O, es decir el sistema se halla en reposo momentáneo en estos puntos. La ecuación (B.O.l) es separable:
dx -¡::::.=== = ±dt Ja- V(x)
donde el signo se elige de acuerdo a si x crece o decrece. En cualquier caso, si en el instante t0 se tiene que x = x 0 y x = v0 , obtenemos:
r ---¡::.=d=z===:==;= = ± ¡t dT lxo J a- V(z) Jto
(B.0.3)
106

(en este caso el valor de v0 interviene en la determinación de la constante a). Si la condición inicial es tal que x0 es diferente de Xm o xM, entonces v0 #-O. En este caso, podemos usar la ecuación (B.0.3) para obtener los valores de x para diferentes instantes de tiempo hasta la primera vez en que el sistema alcance la posición x0 nuevamente y en la misma dirección del movimiento inicial. Es evidente que en este instante, el valor de x debe ser v0 , por la conservación de la energía mecánica. Es decir, volvemos nuevamente a las condiciones iniciales dadas en t0 , y ya que la ecuación diferencial que determina la dinámica del sistema no cambia (para esta parte es fundamental que el potencial U ( x) sea estacionario), la solución debe ser la misma que la hallada anteriormente, en virtud del teorema de existencia y unicidad, tomando ahora el instante inicial en t0 + T, donde T se calcula según:
T= 2 rM dx lxm y' a- V(x)
(B.0.4)
de aquí resulta que el movimiento resultante es periódico con período dado por la ecuación (B.0.4).
107

Bibliografía
[1] LANGTANGEN, Hans Petter. A Primer on Scientific Programming with Python. Springer. 2009.
(2] GOLDSTEIN, Rerbert. POOLE, Charles. SAFKO, John. Classical Mechanics. Third Edition. Addison Wesley. 2001.
[3] RAND, Louis. FINCR, Janet. Analytical Mechanics. Cambridge University Press. 1998.
[4] ARNOLD, V. I. Mathematical Methods of Classical Mechanics. Springer-Verlag. Segunda Edición. 1979.
[5] BARRIENTO, Marta. PÉREZ, Arturo. RAÑADA, Antonio. Weak chaos in the asymmetric heavy top. (http:/ /iopscience.iop.org/0143-0807 /16/3/003)
[6] LANDAU, L. D. LIFSRITZ, E. M. Course of Theoretical Physics Volume 1: Mechanics. Third Edition. Butterworth-Reinenann. 1976.
[7] SOMMERFELD, Arnold. Mechanics: Lectures on Theoretical Physics, Vol l. Academic Press. 1952.
[8] BAKER G. L. GOLLUB J. P. Chaotic Dynamics: An Introduction. Second Edition. Cambridge University Press. 1996.
(9) BUTENIN N. V. NEIMARK Yu .. L FUFÁEV N. A. Introducción a la teoría de oscilaciones no lineales. Moscú. Editorial Mir. 1990.
[10] NAYFER, Ali Rasan. MOOK, Dean T. Nonlinear Oscillations. John Wiley and Sons. 1995.
[11] Attila Máté. Introduction to Numerical Analysis with C Programs. 2004.
[12] A. BEDRI ÓZER, ERRAN AKIN, Tools for Detecting Chaos. SAÜ Fen Bilimleri Enstitüsü Dergisi 9. Cilt, l. Sayst 2005.
(13) A. WOLF. Quantifying Chaos with Lyapunov Exponentes. Princeton University Press. 1986.
(14] JACKSON, Johan David. Electrodinámica Clásica. Editorial Alhambra, S.A. 1966.
108